elektrİk elektronİk fakÜltesİ - yildiz.edu.troakbati/kst_deney_foyu.pdf · 1 yildiz teknİk...
TRANSCRIPT

1
YILDIZ TEKNİK ÜNİVERSİTESİELEKTRİK-ELEKTRONİK FAKÜLTESİ
KONTROL ve OTOMASYON MÜHENDİSLİĞİ BÖLÜMÜ
DiGiAC 1750
Giriş Niteliğinde Dönüştürücüler
&
Deney Seti

2
DENEY – 1: ON/OFF KONTROL
Temel Kapalı Çevrim Kontrol Sistemi:Şekil 1’de temel kapalı çevrim kontrol sistem yapısı verilmiştir. Hata, kontrol edilen değişkene ait verilen referans değer ve sistem çıkış değeri arasındaki farktır. Kontrolün amacı hata değerini sıfır yapmaktır. Böylece kontrol edilen değişken istenen değere (referans) ulaştırılır.
Şekil 1. Temel kapalı çevrim kontrol sistemi.
ON/OFF Kontrol Sistemi:Bu kontrol yapısında kontrolör sadece iki pozisyona sahiptir, Kontrol edilen değişken referans değerin altında ise ONN, Kontrol edilen değişken referans değerin üstünde ise OFF,
Bu yöntem, uzun zaman sabiti değerine sahip sistemlerin kontrolü için idealdir. Örnek olarak, basit bir ısıtıcı ile bir odanın sıcaklığının kontrolü için ON/OFF kontrol yöntemi kullanılabilir. Şekil 2, örnek olarak verilen yapıya ait grafiksel değişimleri vermektedir.
Zaman
VAR ON ONYOK OFF OFF
Oda Sıcaklığı
Referans Sıcaklık Değeri
Şekil 2. Oda sıcaklık değerinin VAR/YOK kontrol sistemine vermiş olduğu cevaba ilişkin grafiksel değişimler.
Başlangıçta kontrolcü ON pozisyonda olduğu için referans değerin üstüne çıkana kadar oda sıcaklığı üstel olarak artışa geçer. Sıcaklık referans değere ulaştığında, ısıtıcının anahtarı OFF konumuna getirilmesine rağmen oda sıcaklığındaki artış belirli bir süre daha devam etmektedir. Daha sonra şekilden görüldüğü gibi zamana bağlı olarak artan bir hızla geri düşmektedir. Sıcaklık değeri, referans değerin altına düştüğü anda ısıtıcının anahtarı kontrolör tarafından ON pozisyonuna getirilmektedir.
Çalışma koşullarında bir değişim olmadığı sürece oda sıcaklığı alt ve üst sınır değerleriarasındaki değişimine devam edecektir.
3
Bölüme Ait Çalışma Aşamaları: ON/OFF sıcaklık kontrol sistemine ait karakteristik yapının incelenmesi.
ON/OFF ışık kontrol sistemine ait karakteristik yapının incelenmesi.
ON/OFF Sıcaklık Kontrol Sistemine Ait Karakteristik Yapı:
Set Üzerinde Kullanılacak Ekipman:
1 Isıtıcı sistem,1 IC (tümleşik devre) sıcaklık sensörü,1 20V DC dijital voltmetre,1 Karşılaştırıcı,1 Elektronik anahtar,1 10kΩ tel-sargı potansiyometre,1 12V’luk lamba,
Bağlantı telleri.
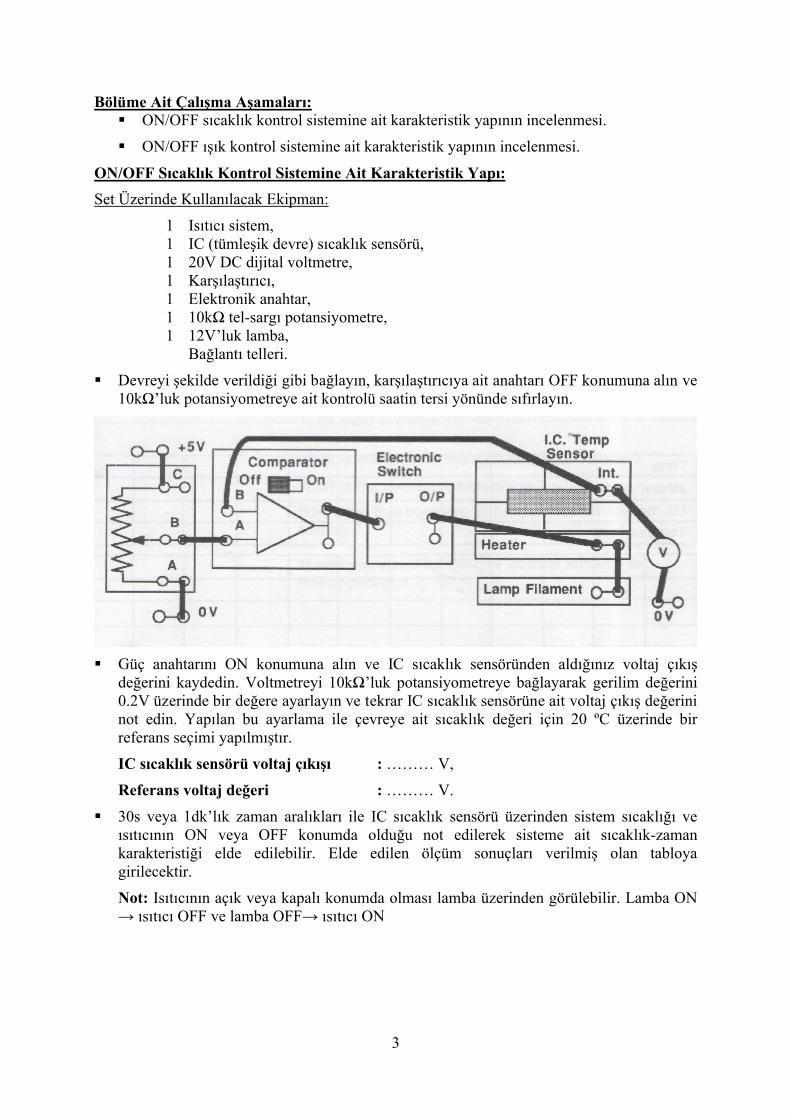
Devreyi şekilde verildiği gibi bağlayın, karşılaştırıcıya ait anahtarı OFF konumuna alın ve 10kΩ’luk potansiyometreye ait kontrolü saatin tersi yönünde sıfırlayın.
Güç anahtarını ON konumuna alın ve IC sıcaklık sensöründen aldığınız voltaj çıkış değerini kaydedin. Voltmetreyi 10kΩ’luk potansiyometreye bağlayarak gerilim değerini 0.2V üzerinde bir değere ayarlayın ve tekrar IC sıcaklık sensörüne ait voltaj çıkış değerini not edin. Yapılan bu ayarlama ile çevreye ait sıcaklık değeri için 20 ºC üzerinde bir referans seçimi yapılmıştır.
IC sıcaklık sensörü voltaj çıkışı : ……… V,
Referans voltaj değeri : ……… V.
30s veya 1dk’lık zaman aralıkları ile IC sıcaklık sensörü üzerinden sistem sıcaklığı ve ısıtıcının ON veya OFF konumda olduğu not edilerek sisteme ait sıcaklık-zaman karakteristiği elde edilebilir. Elde edilen ölçüm sonuçları verilmiş olan tabloya girilecektir.
Not: Isıtıcının açık veya kapalı konumda olması lamba üzerinden görülebilir. Lamba ON → ısıtıcı OFF ve lamba OFF→ ısıtıcı ON

4
Zaman
Isıtıcı Konumu
IC Sıcaklık Sensörü (V)
Sıcaklık
Elde edilen değerlere bağlı olarak, aşağıda verilen eksen takımı üzerine sisteme ait sıcaklık-zaman karakteristiğini çizin.
Zaman (s)
Buna göre sıcaklık değişim miktarı nedir?
Ortalama sıcaklık değeri nedir?
Bu sıcaklık değeri referans değeri ile nasıl karşılaştırılmaktadır?
Sizce bu uygulama içi ON/OFF kontrol uygun mudur?
Sisteme bir alarm devresi ekleyin. Çevre sıcaklığının 30 ºC’yi geçmesi halinde alarm sisteminin devreye girmesi istenmektedir. DIGIAC 1750 deney seti üzerinden uygun elemanları seçerek sistemi oluşturun ve sistemin çalışmasını denetleyin.
5
ON/OFF Işık Kontrol Sistemine Ait Karakteristik Yapı:
Set Üzerinde Kullanılacak Ekipman:
1 Solenoid,1 Fotoiletken hücre,1 Karşılaştırıcı,1 Güç amplifikatörü,1 Elektronik anahtar,1 10kΩ tel-sargı potansiyometre,1 10kΩ karbon sürgü potansiyometre,1 100kΩ karbon potansiyometre,1 12V’luk lamba,1 20V DC Dijital Voltmetre,
Bağlantı telleri.
Sistem solenoidi işletme üzerine kurulmuştur. Işık seviyesinin düşük değer alması solenoidi ON konumuna veya ışık derecesinin önceden belirlenmiş bir değeri aşması ise solenoidi OFF konumuna alacaktır.
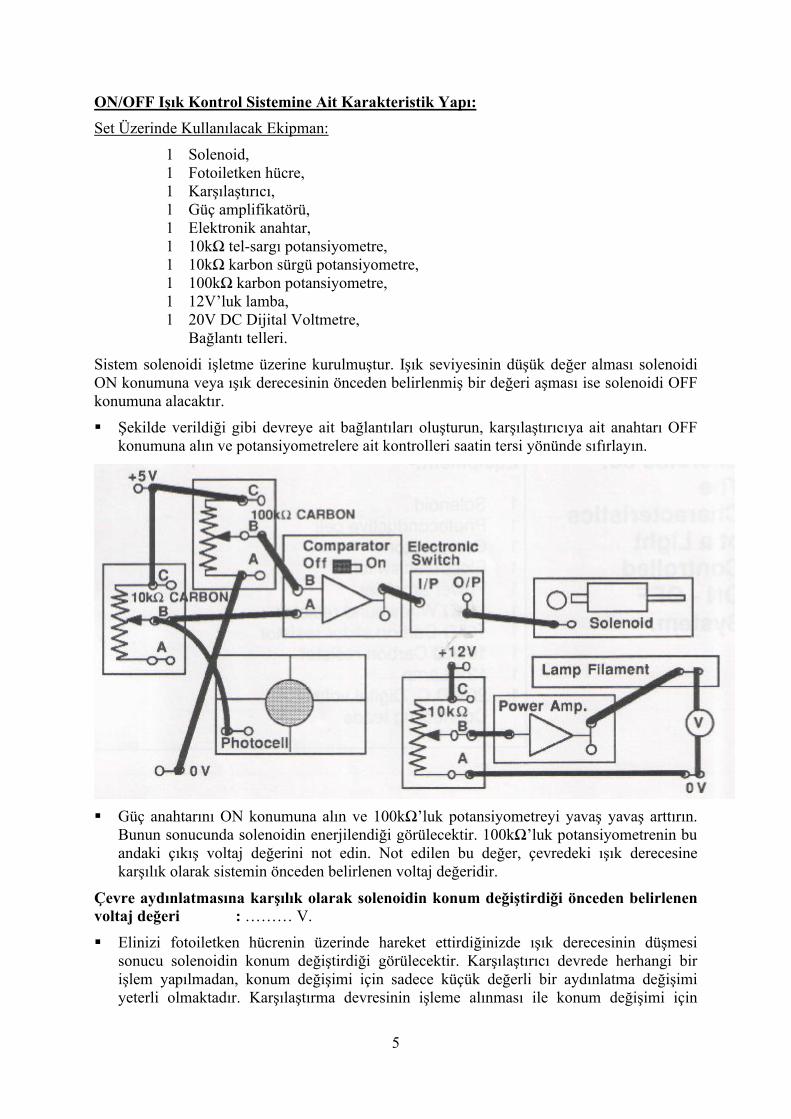
Şekilde verildiği gibi devreye ait bağlantıları oluşturun, karşılaştırıcıya ait anahtarı OFF konumuna alın ve potansiyometrelere ait kontrolleri saatin tersi yönünde sıfırlayın.
Güç anahtarını ON konumuna alın ve 100kΩ’luk potansiyometreyi yavaş yavaş arttırın. Bunun sonucunda solenoidin enerjilendiği görülecektir. 100kΩ’luk potansiyometrenin bu andaki çıkış voltaj değerini not edin. Not edilen bu değer, çevredeki ışık derecesine karşılık olarak sistemin önceden belirlenen voltaj değeridir.
Çevre aydınlatmasına karşılık olarak solenoidin konum değiştirdiği önceden belirlenen voltaj değeri : ……… V.
Elinizi fotoiletken hücrenin üzerinde hareket ettirdiğinizde ışık derecesinin düşmesi sonucu solenoidin konum değiştirdiği görülecektir. Karşılaştırıcı devrede herhangi bir işlem yapılmadan, konum değişimi için sadece küçük değerli bir aydınlatma değişimi yeterli olmaktadır. Karşılaştırma devresinin işleme alınması ile konum değişimi için

6
gerekli olan aydınlatma değişimi artış gösterecektir. Karşılaştırıcı devre tarafından sağlanan karşılaştırma işlemi bu çalışma için uygun bir işlem olup, burada bir kapı mandalı görevi görmektedir.
Lamba teline uygulanan gerilimi 10V’a ayarlayın ve 100kΩ’luk potansiyometrenin değerini solenoid konum değiştirinceye kadar arttırın. Solenoidin konum değiştirdiği andaki 100kΩ’luk potansiyometreye ait çıkış gerilimini not edin.
Not edilen bu voltaj değeri, maksimum ışık derecesine karşılık olarak önceden belirlenen voltaj değerini göstermektedir.
10V’luk lamba gerilimine karşılık olarak solenoidin konum değiştirdiği önceden belirlenen voltaj değeri :……… V.
Lamba teline uygulanan gerilimi 2V’a ayarlayın ve çevre aydınlatmasını yok etme amaçlı olarak fotoiletken hücrenin üzerini elinizle kapatın. Şimdi solenoidin konum değiştirmesi için 100kΩ’luk potansiyometrenin değerinde değişime gidin ve 100kΩ’luk potansiyometreye ait konum değişim anındaki çıkış gerilimini not edin.
2V’luk lamba gerilimine karşılık olarak solenoidin konum değiştirdiği önceden belirlenen voltaj değeri :……… V.
Bu çalışma, ON/OFF kontrol aydınlatma sisteminin kullanımını açıklamaktadır. Elde edilen önceden belirlenen voltaj değeri aralığında bir referans seçimi ile anahtarlama oluşturularak istenilen aydınlatma derecesi elde edilebilecektir.
7
DENEY – 2: P,PI,PD KONTROL
Oransal (P) Kontrol Sistemi:Bu kontrol yapısında kontrolcü çıkışı, girişe verilen hata değerinin belirli bir katsayı ile çarpımı olarak elde edilmektedir.
DegeriHataKCikisiKontrolcü p .
olarak verilir ve Kp kontrolörün oran değeridir. Görüldüğü gibi kontrolörün karakteristiği KP
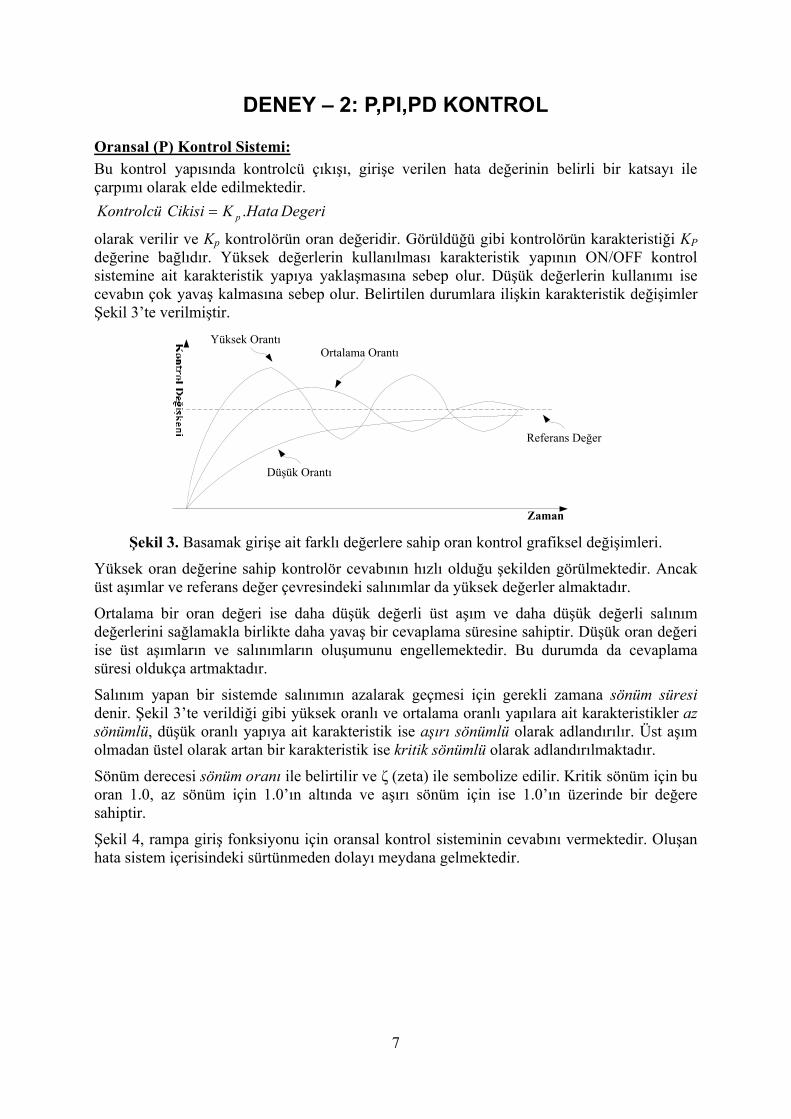
değerine bağlıdır. Yüksek değerlerin kullanılması karakteristik yapının ON/OFF kontrol sistemine ait karakteristik yapıya yaklaşmasına sebep olur. Düşük değerlerin kullanımı ise cevabın çok yavaş kalmasına sebep olur. Belirtilen durumlara ilişkin karakteristik değişimler Şekil 3’te verilmiştir.
Zaman
Referans Değer
Düşük Orantı
Yüksek OrantıOrtalama Orantı
Şekil 3. Basamak girişe ait farklı değerlere sahip oran kontrol grafiksel değişimleri.
Yüksek oran değerine sahip kontrolör cevabının hızlı olduğu şekilden görülmektedir. Ancak üst aşımlar ve referans değer çevresindeki salınımlar da yüksek değerler almaktadır.
Ortalama bir oran değeri ise daha düşük değerli üst aşım ve daha düşük değerli salınım değerlerini sağlamakla birlikte daha yavaş bir cevaplama süresine sahiptir. Düşük oran değeri ise üst aşımların ve salınımların oluşumunu engellemektedir. Bu durumda da cevaplama süresi oldukça artmaktadır.
Salınım yapan bir sistemde salınımın azalarak geçmesi için gerekli zamana sönüm süresidenir. Şekil 3’te verildiği gibi yüksek oranlı ve ortalama oranlı yapılara ait karakteristikler azsönümlü, düşük oranlı yapıya ait karakteristik ise aşırı sönümlü olarak adlandırılır. Üst aşım olmadan üstel olarak artan bir karakteristik ise kritik sönümlü olarak adlandırılmaktadır.
Sönüm derecesi sönüm oranı ile belirtilir ve ζ (zeta) ile sembolize edilir. Kritik sönüm için bu oran 1.0, az sönüm için 1.0’ın altında ve aşırı sönüm için ise 1.0’ın üzerinde bir değere sahiptir.
Şekil 4, rampa giriş fonksiyonu için oransal kontrol sisteminin cevabını vermektedir. Oluşan hata sistem içerisindeki sürtünmeden dolayı meydana gelmektedir.

8
Zaman
Giriş Pozisyon Değişimi
Çıkış Pozisyon DeğişimiHız Gecikmesi
Şekil 4. Rampa giriş işareti için oransal kontrole ait değişim.
Şekilden görüldüğü gibi sistem çıkışı, girişi zaman gecikmeli olarak takip etmektedir. Meydana gelen bu gecikme hız gecikmesi olarak adlandırılır. Gecikmenin genliği ise sistem genliğine, sürtünmeye ve çıkış yüklenmesine bağlıdır.
Grafikten görüldüğü gibi çıkış karakteristiğinde sistem genliğine bağlı olarak salınım da meydana gelebilmektedir.
Bunlardan yola çıkılarak giriş işaretinin zamanla değişen bir yapıya sahip olması durumunda oransal kontrolün yeterli olmayacağı söylenebilir.
Şekil 4’te verilen karakteristiğin anlamı, eğer giriş işareti zamanla değişen bir yapıya sahip ise sade oransal kontrol yeterli olmayacaktır. Sabit girişli sistemler için ise oranlı kontrol dezavantajlı bir özellik gösterecektir.
Örneğin, basamak fonksiyonu girişli bir sistemi göz önüne alalım. Çıkış işareti referans değere ulaştığında hata değeri de sıfır değerini alacaktır. Bu demektir ki, kontrolör çıkış işareti de sıfır değerindedir. Böyle bir pozisyonda çıkışa bir yüklenme olduğunda, çıkış durumunda bir değişim meydana gelecektir, oluşacak olan hata değeri tepkiyi sağlayacaktır ve limit değerde hata ile birlikte çıkış değeri referans değerden ayrılmış olacaktır.
Hata değeri ise çıkışa yapılacak olan yüklenme değerine bağlı olacaktır.
Sonuç olarak; oransal kontrol tek başına kontrol uygulamaları için uygun olmayacaktır.
Uygulamalarda doyum etkisini de düşünecek olursak, hata değerinin büyümesine karşılık tepki değeri hata değerinin belirli bir katsayı ile çarpılmış değerinin üzerine çıkamayacaktır.Şekil 5’te doyum durumu verilmiş olup, hata değerinin belirli bir katsayı ile çarpılmış değişken değerini içeren genlik bandı grafiksel forma dönüştürülmüştür.
Şekil 5. Oransal kontrol için katsayı bandı grafiksel yapı değişimi.

9
İntegratör Kontrol Sistemi:İntegral, kontrol referans ve çıkış işareti arasındaki hata değerini sıfırlamak için kullanılır. İntegral işlemine ait çıkış değeri, giriş x zaman olarak elde edileceğinden dolayı, hata değeri sıfırlanıncaya kadar integratöre ait çıkış işareti artış gösterecektir.
İntegratörü de içeren bir kontrol sistemi oluşturulduğunda, elde edilen kontrol işareti hata değerini sıfırlar. Bunun için geçen zaman değeri integratörün zaman sabitine bağlıdır. Şekil 6’da açıklamaları yapılan işlemlere ve sinyallere ilişkin görsel yapı verilmiştir.
Şekil 6. Integral işleminin kontrol sistemi içerisindeki konumu
Şekilde rampa giriş fonksiyonu için integratör içeren kontrolcünün tepkisi verilmiştir. Hata sinyali oluşması halinde integratör içerikli yapı kontrolcü çıkışının artışını sağlamakta ve hata değeri düzeltilmektedir. Hata sinyalinin sıfırlanması ile birlikte integratör çıkışı da sabit bir değerde kalmaktadır. Görüldüğü gibi hız kontrolü, integratör içerikli olmayan bir kontrolcü ile sıfır hata değerini sağlayamamaktadır.
Oluşabilecek daha yüksek değerli bir hata sinyali de integratör devresinin kapasitesine bağlı olarak otomatik olarak sıfırlanabilmektedir.
Genelde integratör kontrol yapıları oransal kontrolcü ile birlikte kullanılmaktadır. Oransal kontrolör temel yapı olup, integratör ise kontrol işareti için son ayarlamayı gerçekleştiren kısım olmaktadır.
Türevsel Kontrol Sistemi:
Herhangi bir sistem içerisinde sürtünme kayıpları sönüme yol açmaktadır. Buna bağlı olarak bozucu etkiler nedeni ile yüksek genlikli bir oransal kontrol sistemi kullanılır. Fakat bu durumda sistemin kararlı pozisyonu alma zamanı uzamaktadır. Bu da harcanan enerjinin de artışı anlamına gelmektedir.
Yüksek genlikli oransal kontrol sisteminin etkisi türevsel kontrol sistemiyle de sağlanabilmektedir. Burada geri besleme sisteminde kontrol işlemi çıkış sinyalinin veya hata sinyalinin değişim oranına bağlıdır. Şekil 7, bu yapıyı vermektedir.

10
dt
d
Şekil 7. Türevsel kontrol sistemine ilişkin görsel yapı.

11
Pozisyon Kontrol Sistemi Üzerine Karakteristik Yapı Çalışması: P, PI, PD ve PID pozisyon kontrol sistemlerine ait karakteristik yapıların ayrı ayrı
incelenmesi.
Set Üzerinde Kullanılacak Ekipman:
1 Motor sürücü ve çıkış potansiyometresi,1 Ayarlama amplifikatörü,1 Türevsel amplifikatör,1 Toplama amplifikatörü,1 Amplifikatör #1,1 İntegratör,1 İnverter,1 10-0-10V Çok Pozisyonlu Voltmetre,1 Güç amplifikatörü,1 Amplifikatör #2,1 Türev alıcı,1 10kΩ potansiyometre,1 20V DC Dijital Voltmetre,
Bağlantı telleri.
Verilen devre oransal kontrol için ayarlanmış konumdadır. Servo potansiyometrenin sol tarafını bastırarak levhayı yerleştirin ve sonrasında serbest bırakarak sürme şaftının sistemin bir parçası olmasını sağlayın.
Amplifikatör #1’e ait kontrol değerlerini sırası ile 10’a ve 0.1’e ayarlayın, amplifikatör #2’ye ait kontrol değerlerini ise 1’e ve 1.0’a ayarlayın, 10kΩ’luk potansiyometreyi orta noktaya ayarlayın, integratörün zaman sabitini 1s olarak ve türev alıcının zaman sabitini ise 100ms olarak ayarlayın.

12
Oransal Denetleyici:
Güç anahtarını açın ve 10kΩ’luk potansiyometreye ait kontrol anahtarını potansiyometrenin tam değeri üzerine sürün. Motora ait şaft ve servo potansiyometre göstergesi hareket etmelidir ve hareketi takip ettiğinizde sistemdeki uyuşuklukla beraber servo potansiyometrenin ayar noktasını takibe başlamadan önce bir gecikme yaşadığı da görülmelidir. Bunun nedeni sistem genliğinin, yani amplifikatör genliğinin 1.0’a ayar edilmiş olmasıdır. Ayar potansiyometresinin tam değerine karşılık olarak elde edilen servo potansimetrenin tam değerini not edin.
Amplifikatör #1’e ait genlik değeri 1.0’a ve ayar potansiyometresi saat yönünde son noktaya ayarlanması durumunda elde edilen servo takipçi değeri :………
Amplifikatör #1’e ait genlik değeri 1.0’a ve ayar potansiyometresi saatin tersi yönde son noktaya ayarlanması durumunda elde edilen servo takipçi değeri :………
Yeniden 10kΩ’luk giriş potansiyometresini merkez pozisyonuna alın ve amplifikatör #1’e ait hassas (fine) genlik değerini 0.5’e ayarlayarak bir önceki aşmada gerçeklenen işlemleri tekrarlayın. Potansiyometrenin ayarlanma aşamalarının son noktalarında çevirme işlemi yavaş yavaş yapılmalıdır. Aksi takdirde servo potansiyometre iz takibinde son noktayı kaçırarak motorun sürekli olarak dönmesine yol açabilecektir.
Eğer sürekli dönme meydana gelirse, 10kΩ’luk potansiometreyi hemen merkez pozisyonuna alın. Herhangi bir yükün söz konusu olmadığı bu yüksek genlikli kontrol işlemi sırasında, iz takibi çok yakın olarak gerçeklenecektir. Bu yakın takip sırasında hızlı artışlar servo potansiyometrenin kayarak referansın önüne geçmesine ve bu da sürekli harketin başlangıcına yol açacaktır. Bu yakın takip ve kayma işlemi her iki yönde de meydana gelebileceğinden, her iki yönde de referans artışları yavaş yavaş yapılmalıdır.
Amplifikatör #1’e ait genlik değeri 5.0’a ve ayar potansiyometresi saat yönünde son noktaya ayarlanması durumunda elde edilen servo takipçi değeri :………
Amplifikatör #1’e ait genlik değeri 5.0’a ve ayar potansiyometresi saatin tersi yönde son noktaya ayarlanması durumunda elde edilen servo takipçi değeri :………
Amplifikatör #1’e ait genlik değerlerini 10’a ve 1.0’a ayarlayın. Servo potansiyometreye ait göstergenin 0’ı göstermesine kadar giriş potansiyometresine ait değeri arttırın. Şimdi Hall etkisi diskini elinizle yönlendirerek göstergeyi dengeleyin ve sistemin hiçbir cevap vermesine neden olmadan göstergenin geri dönebildiği sınır değerlerini her iki yöne de not edin. İşlemleri amplifikatör #1’e ait hassas genlik değerini 0.5 ve 0.1’e ayarlayarak tekrarlayın.
Not edilen bu değerler, sistemin cevap vermediği bir ölüband sınır değerleri olacaktır.
Amplifikatör #1’e ait genlik ayar değerleri 10 ve 1.0 için ölüband :……… ……..
Amplifikatör #1’e ait genlik ayar değerleri 10 ve 0.5 için ölüband :……… ……..
Amplifikatör #1’e ait genlik ayar değerleri 10 ve 0.1 için ölüband :……… ……..
Bu genlik değerlerinin ölüband üzerindeki etkisi nedir?
Amplifikatör #1’e ait genlik değerlerini 10’a ve1.0’a ayarlayın. Servo göstergenin 30’u göstermesine kadar giriş potansiyometresinin değerini arttırın. Daha sonra amplifikatöre ait hassas ayar değerini 0.1’e ayarlayın.

13
Amplifikatör #2’ye ait genlik kontrollerini 1’e ve 1.0’a ayarlayın. Ve ‘offset’ kontrolü kullanarak sıfır çıkışı elde edin. Şimdi kaba (coarse) kontrolü 100’e ayarlayın ve ‘offset’ kontrolü kullanarak +3V çıkışını elde edin. Daha sonra kaba kontrolü tekrar 1 pozisyonuna alın. Bu kontrol değerleri sisteme bir basamak fonksiyonu girişi oluşturarak, bu fonksiyonun sistem üzerindeki etkilerinin incelenmesi için kullanılacaktır.
Amplifikatör #2’ye ait kaba genlik kontrolünü 1’den 100’e alın ve bu değişimin motora ait çıkış şaftı üzerindeki etkisini not edin. Kaba kontrolü 100’den tekrar 1’e alarak bu değişimin de motor çıkış şaftı üzerindeki etkisini not edin. Bu kaba kontrol değişimine ait prosedürü birkaç defa tekrarlayarak notlarınız alın.
Amplifikatör #1’e ait genlik kontrollerini 10’a ve 0.1’e ayarlayın.
Bu ayar değerlerinin etkisi nedir?
Amplifikatör #1’e ait hassas genlik kontrolünü 0.5’e ve 1.0’a ayarlayarak değişimleri gözlemleyelim
Amplifikatör #1’e ait genlik kontrollerini 10’a ve 0.5’e ayarlayın.
İşlem daha hızlı mıdır?
Herhangi bir üst aşım oluşmakta mı?
Amplifikatör #1’e ait genlik kontrollerini 10’a ve 1.0’a ayarlayın.
İşlem daha da hızlı mıdır?
Daha fazla üst aşım oluşmakta mı?
Bu çalışmada oransal denetleyicinin temel karakteristikleri açıklanmıştır. Bu karakteristikler aşağıda belirtildiği şekilde özetlenebilir:
Düşük genlik. Geniş bir ölü band ve basamak girişe verilen aşırı sönümlü bir cevap.
Orta değer genlik. Orta değer ölü band ve basamak girişe verilen küçük değerli eksik sönümlü bir cevap.
Büyük genlik. Dar ölü band ve basamak girişe verilen eksik sönümlü bir cevap.

14
Oransal + Integratör Denetleyici:
Zaman sabiti 1s olarak ayarlanmış integratörün “reset” butonuna basın ve şekilde mat çizgi ile verildiği gibi integratörün çıkışlarını toplama amplifikatörünün girişine bağlayın. Şimdi reset butonunu serbest bırakın.
Amplifikatör #1’e ait genlik değerlerini 10’a ve 0.1’e ayarlayın ve amplifikatör #2’ye ait kaba kontrol değerini 100’e ayarlayarak +3V’luk basamak fonksiyonu elde edin. Bu genlik değerlerinin elde edilen basamak fonksiyonu karşısındaki etkisini not edin.
Bir başlangıç adım değişimi oldu mu?
Bu değişimden sonra ne oldu?
Dijital voltmetre üzerinden integratör çıkışını gözlemleyin. Ne olmakta?
Servo motora ait değişim ile integratör çıkışına ait değişim aynı mıdır?
Integratör çıkışı, motor torku sistem dahilindeki sürtünmenin üzerine çıkıncaya kadar artar. Ve daha sonra şaft pozisyonu değişir.
Şaft pozisyonu ayar değerinin üzerine çıkar. Bu nedenle integratör ters yönde etki gösterecektir. Bunun sonucunda şaft sürekli olarak çevrinecektir.
Şimdi amplifikatör #1’e ait hassas genlik değerini önce 0.5’e ve daha sonra da 0.1’e ayarlayarak yukarıda verilen prosedürü tekrarlayın. Ve sonuçları aşağıdaki şekilde özetleyin.
Amplifikatör #1’e ait genlik değerleri 10 ve 0.5, İntegratör zaman sabiti 1s.
Başlangıç cevabı öncekinden daha hızlı mıdır?
Bir üst aşım söz konusu mudur?
Pozisyon için bir final düzenlemesi mevcut mudur?
Amplifikatör #1’e ait genlik değerleri 10 ve 1.0, İntegratör zaman sabiti 1s.
Başlangıç cevabı daha hızlı mıdır?
Daha fazla bir üst aşım söz konusu mudur? Ne kadar?
Pozisyon için bir final düzenlemesi mevcut mudur?
Amplifikatör #1’e ait genlik değerlerini 10’a ve 1.0’a ayarlayın ve integratöre ait zaman sabiti değerini önce 10s ve daha sonra da 100ms’ye ayarlayarak yukarıda verilen prosedürü her bir zaman sabiti değeri için tekrarlayın. Ve integratöre ait zaman sabitinin etkilerini not edin.
Zaman sabiti 10s için final düzenleme zamanı daha fazla mıdır?
Zaman sabiti 100ms için final düzenleme zamanı daha kısa mıdır?
Şimdi zaman sabiti değeri 100ms için amplifikatör #1’e ait hassas genlik değerini sırası ile 0.1, 0.5 ve 1.0 değerlerine ayarlayarak, her bir değer için Hall etkisi diskini elinizle hareket ettirerek sistem çıkışını kararlı pozisyonundan uzaklaştırın ve bu değişimin etkilerini gözlemleyin.
Amplifikatör #1’e ait genlik değerleri 10 ve 0.1, İntegratör zaman sabiti 100ms.
Diski hareket ettirmek için gerekli güç =

15
Yeniden ayarlanma zamanı =
Amplifikatör #1’e ait genlik değerleri 10 ve 0.5, İntegratör zaman sabiti 100ms.
Diski hareket ettirmek için gerekli güç =
Yeniden ayarlanma zamanı =
Amplifikatör #1’e ait genlik değerleri 10 ve 1.0, İntegratör zaman sabiti 100ms.
Diski hareket ettirmek için gerekli güç =
Yeniden ayarlanma zamanı =
Bu çalışmada integral denetleyiciye oransal denetleyici eklenmesi durumunda oluşan temel karakteristikler incelenmiştir. Bu karakteristikler aşağıda belirtildiği şekilde özetlenebilir:
Integral denetleyici kararlı hal hata değerlerini sıfırlamaktadır. Örnek olarak son ayar değerleri verilmiş integral + oransal denetleyici sistemleri verilebilir.
İntegratör zaman sabiti değerinin düşürülmesi hata değerinin sıfırlanma zaman değerini de düşürecektir. Ancak bu durumda, sistem çıkışında salınımlar oluşabilmektedir.
Oransal + Türevsel Denetleyici:
Integral denetleyiciden toplama amplifikatörüne gelen bağlantı kablolarını çıkartarak çalışmaya başlayalım. Evirici çıkışından aldığınız bağlantı telini, şekilde mat çizgiyleverildiği gibi toplama amplifikatörü girişine bağlayın.
Amplifikatör #1’e ait genlik değerlerini 10 ve 1.0, türev alıcının zaman sabiti değerini 1s olarak ayarlayın. Amplifikatör #2’ye ait kaba genlik değerini 1’den 100’e alarak +3V’luk basamak fonksiyonu oluşturun ve servo sisteme ait cevabı not edin.
Aynı prosedürü türev alıcının zaman sabiti değerini sırası 100ms’ye ve 10ms’ye ayarlayarak gerçekleyin ve cevapları not edin.
Amplifikatör #1’e ait genlik değerleri 10 ve 1.0, Türev alıcı zaman sabiti 1s.
Basamak girişe verilen cevap =
Amplifikatör #1’e ait genlik değerleri 10 ve 1.0, Türev alıcı zaman sabiti 100ms.

16
Basamak girişe verilen cevap =
Amplifikatör #1’e ait genlik değerleri 10 ve 1.0, Türev alıcı zaman sabiti 10ms.
Basamak girişe verilen cevap =
Servo çıkışı kararlı durumundan uzaklaştırarak, oluşan etkileri not edin. Yeniden ayarlamaya ve hatanın düzeltilmesine yönelik bir eğilim var mıdır? Etkiler amplifikatör #1’e ait daha düşük genlik değerleri için daha gözlemlenebilir olacaktır.
Bu çalışmada oransal + türevsel denetleyiciye ait temel karakteristikler incelenmiştir. Bu karakteristikler aşağıda belirtildiği şekilde özetlenebilir:
Türevsel denetleyici, sadece çıkışta değişim olması halinde cevap üzerine etki eder. Bu etki, değişim yönüne karşı koyucu bir yapıdadır. Cevabın sönümü buna örnek olarak verilebilir.
Türev alıcının zaman sabitini arttırmak, bu sönüm etkisini de arttıracaktır.
Türevsel denetleyici kararlı hal hata değeri üzerine bir etkiye sahip değildir.
Oransal + Integratör+Türevsel Denetleyici:
İntegratörün “reset” butonuna basın ve şekilde mat çizgi ile verildiği gibi integratörün çıkışlarını toplama amplifikatörünün girişine yeniden bağlayın. Amplifikatör #1’e ait genlik değerlerini 10’a ve 1.0’a ayarlayın.
İntegratör ve türev alıcı için bütün zaman sabiti alternatiflerini ayarlayarak, +3V’luk basamak girişin etkisini not edin. Bu zaman sabitlerinin etkilerini not edin ve optimum cevabı küçük değerli bir üst aşımla elde edebilecek kombinasyonu belirleyin.
Amplifikatör #1’e ait genlik değerleri 10 ve 1.0’a ait optimum kombinasyon değerleri:
İntegratör =
Türev alıcı =
Türev Alıcı Yerine Takogeneratörden Hız Geribesleme Kullanımı:
Türev alıcı devrenin bağlantılarını devreden alın ve bunların yerine şekilde verildiği gibi yeni bağlantıları oluşturun. 100kΩ’luk potansiyometre takogeneratörden alınan hız geri beslemenin genliğinin değişimi için kullanılacaktır. Başlangıç olarak potansiyometreyi tamamı ile saatin tersi yönde ayarlayın. Bu, hıza ait geri besleme değeri sıfır demektir.
17
Sistem şimdi bir önceki 3-süreçli PID kontrolöre eşdeğerdir. 100 kΩ’luk potansiyometrenin değişik değerleri için +3V’luk basamak fonksiyona verilecek olan cevapları not edin. Ve bir önceki PID denetleyici ile benzer cevapların elde edilebildiğini belirleyin.
18
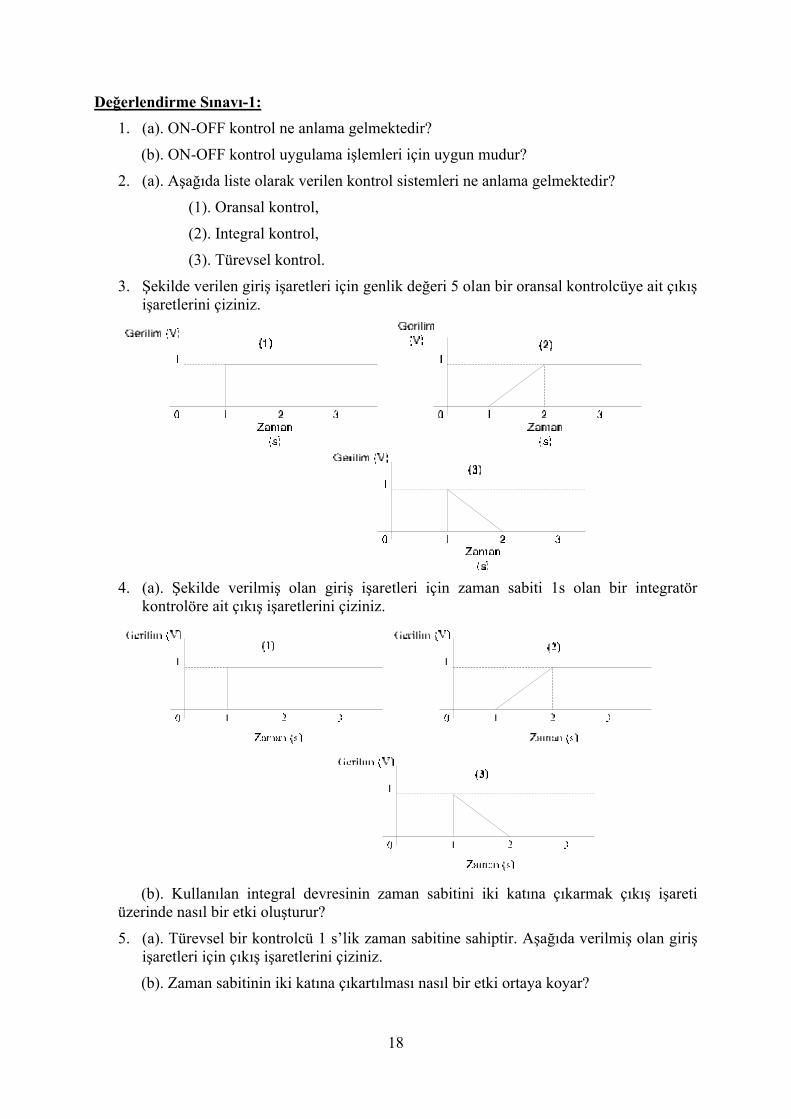
Değerlendirme Sınavı-1:
1. (a). ON-OFF kontrol ne anlama gelmektedir?
(b). ON-OFF kontrol uygulama işlemleri için uygun mudur?
2. (a). Aşağıda liste olarak verilen kontrol sistemleri ne anlama gelmektedir?
(1). Oransal kontrol,
(2). Integral kontrol,
(3). Türevsel kontrol.
3. Şekilde verilen giriş işaretleri için genlik değeri 5 olan bir oransal kontrolcüye ait çıkış işaretlerini çiziniz.
4. (a). Şekilde verilmiş olan giriş işaretleri için zaman sabiti 1s olan bir integratör kontrolöre ait çıkış işaretlerini çiziniz.
(b). Kullanılan integral devresinin zaman sabitini iki katına çıkarmak çıkış işareti üzerinde nasıl bir etki oluşturur?
5. (a). Türevsel bir kontrolcü 1 s’lik zaman sabitine sahiptir. Aşağıda verilmiş olan giriş işaretleri için çıkış işaretlerini çiziniz.
(b). Zaman sabitinin iki katına çıkartılması nasıl bir etki ortaya koyar?
19
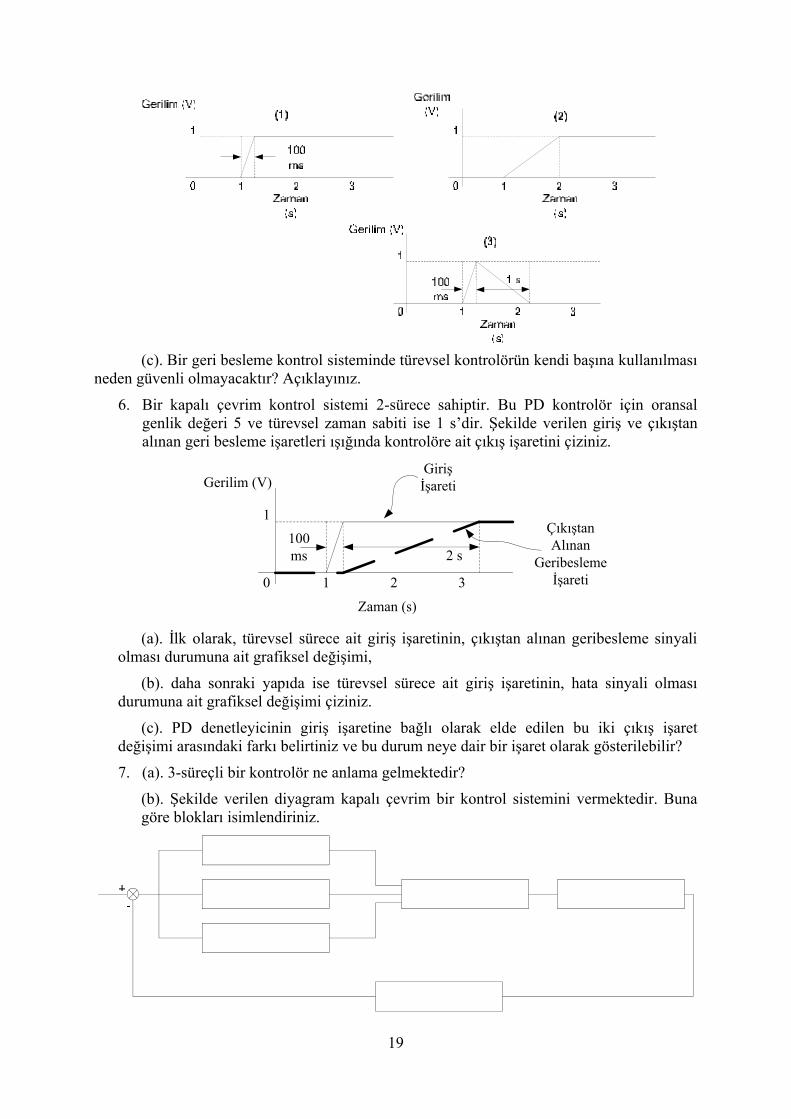
(c). Bir geri besleme kontrol sisteminde türevsel kontrolörün kendi başına kullanılması neden güvenli olmayacaktır? Açıklayınız.
6. Bir kapalı çevrim kontrol sistemi 2-sürece sahiptir. Bu PD kontrolör için oransal genlik değeri 5 ve türevsel zaman sabiti ise 1 s’dir. Şekilde verilen giriş ve çıkıştan alınan geri besleme işaretleri ışığında kontrolöre ait çıkış işaretini çiziniz.
Gerilim (V)
1
0 1 2
Zaman (s)
3
100 ms 2 s
Giriş İşareti
Çıkıştan Alınan
Geribesleme İşareti
(a). İlk olarak, türevsel sürece ait giriş işaretinin, çıkıştan alınan geribesleme sinyali olması durumuna ait grafiksel değişimi,
(b). daha sonraki yapıda ise türevsel sürece ait giriş işaretinin, hata sinyali olması durumuna ait grafiksel değişimi çiziniz.
(c). PD denetleyicinin giriş işaretine bağlı olarak elde edilen bu iki çıkış işaret değişimi arasındaki farkı belirtiniz ve bu durum neye dair bir işaret olarak gösterilebilir?
7. (a). 3-süreçli bir kontrolör ne anlama gelmektedir?
(b). Şekilde verilen diyagram kapalı çevrim bir kontrol sistemini vermektedir. Buna göre blokları isimlendiriniz.

20
(c). Sadece orta değerli bir genliğe sahip oransal denetleyici için basamak fonksiyonuna ait cevabın giriş olarak kullanılması halinde beklenen çıkış işaretine ait sürekli rejim durumunu çiziniz.
(d). Diğer kontrol süreçlerinin de devreye alınmasının bu karakteristiğe nasıl etkide bulunacağını açıklayınız.
(e). Türevsel sürece ait çıkış işaretini çiziniz.
(f). Optimum hız cevabının elde edilmesinde kullanılan genel sönüm oranı değeri nedir? Karakteristik şekli nasıldır ve bu karakteristik yapıyı basamak fonksiyona cevap olarak çiziniz?

21
DENEYLERDE KULLANILAN ELEMANLAR için EK BİLGİLER
1. IC Sıcaklık Sensörü
Bu 16 tarnsistör, 9 direnç ve 2 kapasite içeren transistör tipi bir tümleşik devredir. Referans numarası LM 335’tir ve 10mV/°K eğiliminde bir çıkış işareti sağlamaktadır. Bu nedenle çıkış voltajının ölçülmesi, bize doğrudan °K birimi türünden çıkışı verecektir. Çıkış voltajının 2.93V değeri, 293 °K (20 °C) sıcaklık değerine karşılık gelecektir. Digiac 1750 deney seti içerisindeki IC sıcaklık sensörü düzenlemesi şekildeki gibidir.
İstenmesi halinde bağlantı olanağı sunma amaçlı olarak, harici bir LM 335 entegresi için 2-bağlantı ucu verilmiştir.
Not: LM 335 harici ısı çitine bağlanmıştır ve Kelvin birimli bir ısıl çift ile uydurulmuştur. Tümleşik devrenin çıkışı, “Ref” soketinden alınmıştır.
Isı çiti sayesinde “Int” soketinden alınan gerilim değeri doğrudan çevresel sıcaklık değerine bir gösterge olarak gösterilebilir. Şekilde de belirtildiği gibi tümleşik devre ısı çitine ait sıcaklık değeri üzerinde işlem yapmaktadır.
Isıtıcının kullanılması halinde tümleşik devrenin “Ref” soketinden alınan çıkış değeri, çevresel sıcaklık değerine yanlışsız bir gösterge olarak kullanılamaz. Zira ısıl enerji deney setine ait temel yapı üzerinden ve doğrudan sistem elemanlarına müdahalede bulanacaktır. Bu nedenle, daha yanlışsız bir çevre sıcaklığı ölçümü yapabilmek adına uzağa yerleştirilmiş bir LM 335 tümleşik devresi veya farklı bir ölçüm yöntemine ihtiyaç duyulacaktır.

22
DENEY – 3: Shake Table
1. Shake Table Deney DüzeneğiQuanser Shake Table, yapısal dinamikler, titreşim yalıtımı, geri-beslemeli kontrol gibi çeşitli konularda eğitici bir deney düzeneğidir. Üzerine 7.5 kg kütle monte edilen üst tabla 2.5 g ivmelenmeyi sağlayan güçlü bir motor tarafından sürülmektedir. Tabla iki metal mil üzerinde küçük sapmalarla düzgün lineer hareketlenmeyi sağlayan lineer rulmanlar kullanarak hareket etmektedir. Merkezden başlandığında yüzey her iki tarafa 7.62 cm, veya 3 inç, böylece toplamda 15.24 cm hareket etme kabiliyetine sahiptir. Yüksek güçlü eyleyici 400 Watt 3 fazlı fırçasız DC motordur. Motor, tablanın konumunu 3.10 m lineer çözünürlükle ölçebilen yüksek çözünürlüğe sahip bir enkoder içerir. Analog bir ivmeölçer, tablanın ivmelenmesini ölçmek üzere platformun üzerine monte edilmiştir.
Şekil 1’de ‘Shake Table’ düzeneğinin ana bileşenleri görülmektedir. Bir kesintisiz güç kaynağı (UPM, Universal Power Module), bir veri toplama kartı (DAC, Data-Acquisition Card), WinCon kontrol yazılımının çalıştığı bir bilgisayar ve ‘Shake Table’ platformu sistemin bileşenleridir.
İvmeölçer
İvme geri-beslemesi
Enkoder
Konum geri-besleme
Amplifikatöre kontrol sinyaliMotor sürme akımı
WinConShake Table
Şekil1 Sistem bileşenleri
Kullanıcının tablanın bir sinüs dalgasını takip etmesini istediği bir örnekte sistem bileşenleri arasındaki işaret geçişlerini ele alalım. PC’de WinCon programı aracılığıyla kullanıcı sinüs dalgasının genliğini ve frekansını belirler. Tablayı hareket ettirmek için gerekli akım WinCon programında hesaplanır ve data toplama kartının analog çıkış kanalı vasıtasıyla UPM’e gönderilir. UPM içerisindeki amplifikatör akımı kuvvetlendirir ve motoru sürer. Tabla istenilen sinüs dalgasının frekansında ve genliğinde geri ve ileri hareket eder. Yer değişimi ve tablanın ivmesi enkoder ve ivme sensörü tarafından ölçülür. Enkoder ve ivmeölçer DAC kartına bağlıdır ve sinyalleri WinCon aracılığıyla izlenebilir ve kullanılabilir. Çizdirilen datalar sonraki analizler için saklanabilir.

23
Sistemde kullanılan elemanlar Şekil2’de görülmektedir.
Şekil2 Sistem elemanları
1 Tabla 2 Taban 3 Fırçasız DC Motor 4 Kurşun vida 5 Vida somunu 6 Elle ayarlama 7 Çelik ray 8 Lineer rulman blok 9 Sensör devre kartı 10 Sol limit sensör 11 Pozisyonlama Sensörü 12 Sağ limit sensör 13 Motor Konnektörü 14 Motor Enkoder 15 İvmeölçer 16 İvmeölçer Konnektörü
2. Deney Düzeneği ile Yapılmış Uygulama ÖrnekleriŞekil3’de ‘Shake Table’ deney düzeneği ile yapılmış uygulamalara örnekler verilmiştir.
Şekil3 ‘Shake Table’ uygulamaları
24
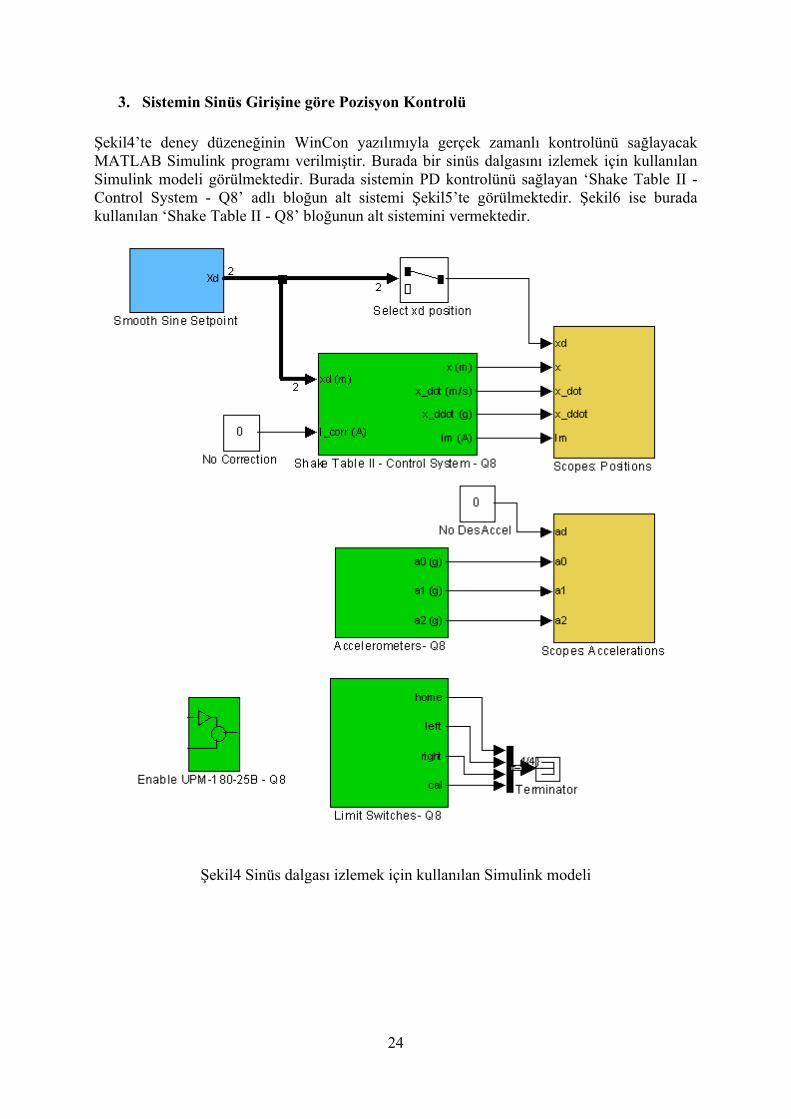
3. Sistemin Sinüs Girişine göre Pozisyon Kontrolü
Şekil4’te deney düzeneğinin WinCon yazılımıyla gerçek zamanlı kontrolünü sağlayacak MATLAB Simulink programı verilmiştir. Burada bir sinüs dalgasını izlemek için kullanılan Simulink modeli görülmektedir. Burada sistemin PD kontrolünü sağlayan ‘Shake Table II -Control System - Q8’ adlı bloğun alt sistemi Şekil5’te görülmektedir. Şekil6 ise burada kullanılan ‘Shake Table II - Q8’ bloğunun alt sistemini vermektedir.
Şekil4 Sinüs dalgası izlemek için kullanılan Simulink modeli

İSTANBUL - 2010 - 25 -
Şek
il5
‘Sha
ke T
able
II
-C
ontr
ol S
yste
m -
Q8’
blo
ğunu
n al
t sis
tem
i
Şek
il6
‘Sha
ke T
able
II
-Q
8’ b
loğu
nun
alt s
iste
mi

İSTANBUL - 2010 - 26 -
Şekil7’de sistemin PD pozisyon kontrolü için WinCon kütüphanesinden alınan bloğun alt sistemi verilmiştir.
2
v (m/s)
1
u (A)
TablePosition Error
K* u
PD Gain
98696s
s +565.49s+986962
High-Pass Filter
2
x (m)
1
Xd (m)
22
2
2
Şekil 7 PD kontrol bloğu
Sistemin transfer fonksiyonu motora uygulanan akım, Im ve pozisyon, x arasındaki bağıntınıns domeninde ifade edilmesidir, (1).
2
m
f
I sX s
K s (1)
Burada verilen Kf ise açık çevrim kazancıdır ve Denklem (2)’de verilmiştir.
t b
t
M PX s
K (2)
Burada Mt motorun hareket etmesiyle birlikte oluşan toplam kütle, Pb ve Kt ise motora özgün kataloğunda verilmiş sabitlerdir.
Sistemin pozisyon kontrolü için Şekil 8’de verilen Denklem (3)’teki PD kontrol kullanılmıştır.
m p d d sd dI s k X s X s k sX s sb X s (3)
Burada Xd arzu edilen motor pozisyonunu, kp oransal kazancı, kd türevsel kazancı ifade etmektedir. (3)’te verilen PD kontrol denklemi (1)’deki açık çevrim transfer fonksiyonunda yerine koyulup X(s)/Xd(s) çözülürse sistemin kapalı çevrim fonksiyonu,
2
p d sd
d f p d
k k sbX s
X s K s k k s
(4)
olarak elde edilir.
Bu kapalı çevrim transfer fonksiyonu verilen bir konum komutuna karşılık zemin konumunun nasıl cevap vereceğini tanımlar.

İSTANBUL - 2010 - 27 -
Şekil 8 Shake table II sisteminin konumu için kullanılan kontrol sisteminin blok diyagramı
PD kontrolör Şekil 7’deki PD konum kontrolörü bloğunda yapıldı ve şu yapıdadır.u=K (Xd-X) (5)Buradaki K kontrol kazancı, Xd ayar noktası durumu, ve X ölçülen durumdur. Kontrol kazanç vektörü K=[kp,kd]
T şeklinde tanımlıdır ve ayar noktası durumu Xd=[xd,vd]T istenen vd hız ile birlikte
istenen xd konumunu içerir. İstenen konum ve hız Simulink bloklarıyla üretilir. Sistemin durumuX=[x,vx]
T şeklinde tanımlıdır. Burada x ölçülen tabla konumlarını ve vx tablanın hızıdır. Direkt olarak Shake Table tablasının hızının ölçümü yoktur. (örneğin takometre gibi). Bu yüzden ölçülen pozisyonun türevi alınarak hesaplanır ve gürültüyü elimine etmek için filtrelenir. Hız aşağıdaki gibi ikinci dereceden yüksek geçiren filtre kullanılarak hesaplanır.
(6)
Burada ζ filtrenin sönüm oranı ve wd filtrenin kesim frekansıdır(rad/s cinsinden). Bu filtre parametreleri Matlab M-file dosyasında kuruludur ve çalıştırılırak hız cevabının bantgenişliği ve şekli değiştirlebilir.
KONTROL PARAMETRELERİ bölümünde konum kontrolörün doğal frekansı ve sönüm oranı kullanıcı tarafından tanımlanır.Kapalı çevrim sistemin istenen doğal frekansı (Hz); f0 = 15;Kapalı çevrim sistemin istenen sönüm oranı; zeta = 0.75;
Tablo 1: Değişen yük kütlesi için hesaplanan örnek kontrol kazançları
Motor tarafından taşınmakta olan toplam kütle M değişkeniyle gösterilir. Kontrol kazançlarını

İSTANBUL - 2010 - 28 -
üretmek için 2 adet tasarım kontrol parametresi kullanılır: doğal frekans, f0, ve sönüm frekansı ζ. Genellikle doğal frekans cevabın hızını belirler ve sönüm oranı cevabın şeklini belirler (örneğin aşım). Bu özellikleri tanımlamak için, her iki kontrol kazancı arttırılan yük kütlesi gibi arttırılır. İstenen konumu verilen tablanın cevabını tanımlayan kapalı çevrim transfer fonksiyonu daha önce elde edilmiştir ve eşitlik (4)’te verilmiştir. Bu ikinci dereceden sistemin ve ayar noktası hız değişkeni bsd=0 iken, ikinci dereceden transfer fonksiyonu ile eşleştirilebilir.
(7)
Burada w0 doğal frekans ve ζ sönüm oranıdır. Dikkat edilirse f0 doğal frekansın birim Hertz iken, w0 doğal frekansı rad/s şeklindedir. Arasındaki ilişki ise
(8)şeklindedir.Aşağıdaki kontrol kazançları kullanılarak, Eşitlik (4)’teki Shake Table II kapalı çevrim transfer fonksiyonun paydası sisteminin eşitlik karakteristik eşitlik olarak bilinen (7)’deki transfer fonksiyonun paydasıyla eşleştirilir.
(9)
(10)
Tablo 1’deki listelenmiş kazançlar oransal kazanç ilişkisi (9) ve (10)’de tanımlı turev kazanç formulü kullanılarak elde edilir.
4. Modelin Matlab Simulasyonu ve Gerçek Zamanlı Çalışma Sonuçlarının Karşılaştırılması
1
s 2
Transfer Fcn
Sine Wave
Scope1
Scope
98696s
s +565.49s+986962
High-Pass Filter
kp
Gain3
kd
Gain2
1/kf
Gain1bsd
Gain
du/dt
Derivative1
du/dt
Derivative
Şekil 9 Shake Table Sistemi Konum Kontrolü Simulink Blok Diagramı

İSTANBUL - 2010 - 29 -
0 1 2 3 4 5 6 7 8 9 10-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
Zaman
Poz
isyo
n(cm
)
Konum
Xd
X
Şekil 10 Shake Table Sistemi Konum Kontrolü Simulasyon Cevabı
0 1000 2000 3000 4000 5000 6000 7000 8000-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
Zaman
Kon
um
Gercek Zamanli Sistem Konum Cevabi
X
Xd
Şekil 11 Shake Table Sistemi Konum Kontrolü Gerçek Zamanlı Sistem Cevabı

İSTANBUL - 2010 - 30 -
DENEY – 4: Manyetik Top Askı Sistemi
1. Deney Düzeneği
Manyetik Top Askı sistemi kontrol alanındaki popüler uygulamalardan biridir. Buradaki amaç metal bir kürenin manyetik alan etkisi ile havada sabit tutulmasıdır. Bunun gerçekleştirilebilmesi için güç kaynağı, elektro mıknatıs oluşturabilmek için sargı, topun konumunu algılayabilmek için algılayıcı düzeneği ve kontrol ünitesine ihtiyaç vardır.
Şekil 1’ de tüm sistemi temsili bir diyagram görülmektedir.
GüçKaynağı
KontrolÜnitesi
ElektroMıknatıs
SENSOR
Fiziksel Sistem
Şekil 1: Temsili Diyagram
2. Fiziksel Sistemin Modellenmesi
Sisteme ait diferansiyel denklem,
),(2
2
ixfmgdt
xdm (11)
Burada top üzerine etki eden manyetik kuvvetin ( f ), topun ağırlığına eşit olması durumunda topun
ivmesinin (2
2
dt
xdm ) sıfırlanacağı görülmektedir. Fakat topa etki eden kuvvetin topun konumuna ve
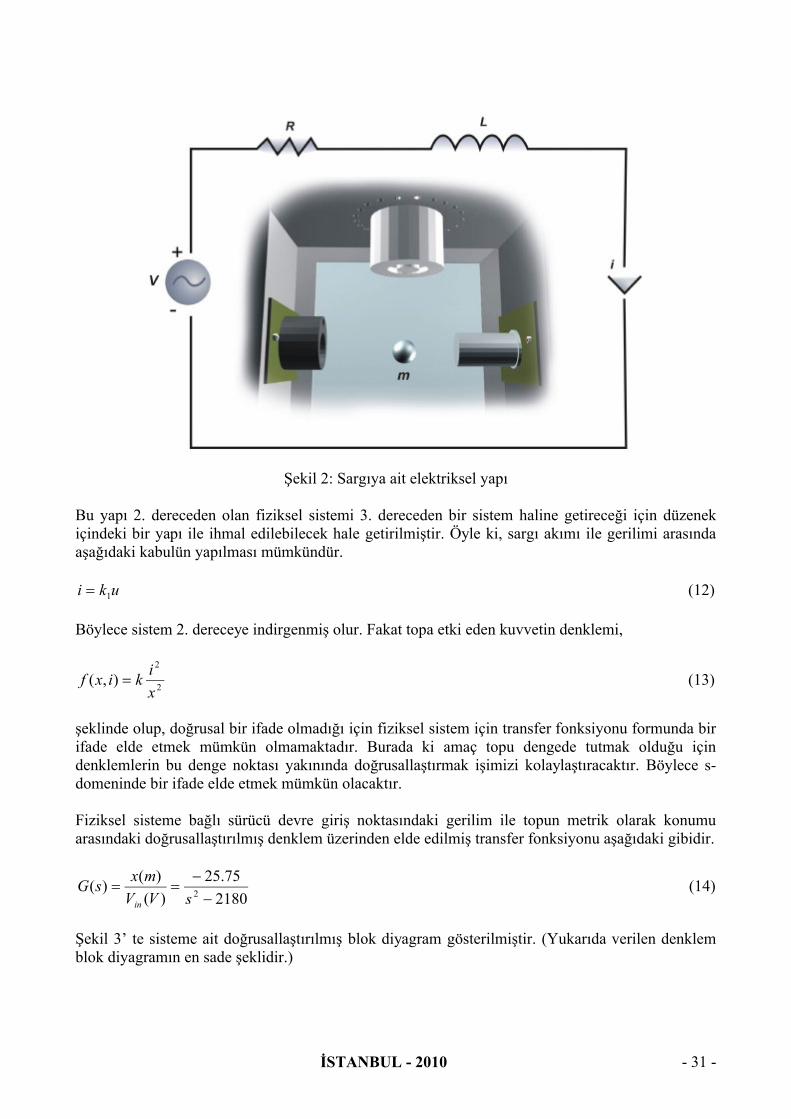
sargıdan geçen akıma bağlı bir fonksiyon olduğu unutulmamalıdır. Sargıya ait elektriksel yapı Şekil 2’ de mevcuttur.
İSTANBUL - 2010 - 31 -
Şekil 2: Sargıya ait elektriksel yapı
Bu yapı 2. dereceden olan fiziksel sistemi 3. dereceden bir sistem haline getireceği için düzenek içindeki bir yapı ile ihmal edilebilecek hale getirilmiştir. Öyle ki, sargı akımı ile gerilimi arasında aşağıdaki kabulün yapılması mümkündür.
uki 1 (12)
Böylece sistem 2. dereceye indirgenmiş olur. Fakat topa etki eden kuvvetin denklemi,
2
2
),(x
ikixf (13)
şeklinde olup, doğrusal bir ifade olmadığı için fiziksel sistem için transfer fonksiyonu formunda bir ifade elde etmek mümkün olmamaktadır. Burada ki amaç topu dengede tutmak olduğu için denklemlerin bu denge noktası yakınında doğrusallaştırmak işimizi kolaylaştıracaktır. Böylece s-domeninde bir ifade elde etmek mümkün olacaktır.
Fiziksel sisteme bağlı sürücü devre giriş noktasındaki gerilim ile topun metrik olarak konumu arasındaki doğrusallaştırılmış denklem üzerinden elde edilmiş transfer fonksiyonu aşağıdaki gibidir.
2180
75.25
)(
)()(
2
sVV
mxsG
in
(14)
Şekil 3’ te sisteme ait doğrusallaştırılmış blok diyagram gösterilmiştir. (Yukarıda verilen denklem blok diyagramın en sade şeklidir.)

İSTANBUL - 2010 - 32 -
Şekil 3: Doğrusallaştırılmış model
2
Ball
posi
tion [m
]
1
Ball
posi
tion [V
]
pos
ition
vol
tage
Subsy
stem
2
1.0
5 Kx1
2*0
.02*9
.81/0
.009
Kx
-2*0
.02*9
.81/0
.8
Ki
1 s
Inte
gra
tor2
1 s
Inte
gra
tor1
Div
ide
0.0
2
Const
ant
1
Volta
ge s
ignal

İSTANBUL - 2010 - 33 -
Burada dikkat edilmesi gereken nokta, sistemdeki topun konumunu ölçen algılayıcının konumu gerilim cinsinden ve farklı bir skalada veriyor olmasıdır. “Subsystem2” bloğunun açık şekli Şekil 4’ te mevcuttur.
1voltage
143.48
Gain2
-2.8
Constant1
1position
Şekil 4 Subsystem2
Algılayıcıdan ölçülen değerin topun metrik konumundan farklı değerler vermesi kurulacak olan kapalı çevrim kontrol sisteminde referans değeri ile çıkış arasında eşleşmezlikler olmasına sebep olacaktır. Ayrıca daha önce verilen açık çevrim transfer fonksiyonunun ( )(sG ) direkt olarak kullanmamız mümkün değildir.
3. Fiziksel Sistemin Denetlenmesi
Sistemin denetlenmesi için PD denetleyici kullanılmış olup, bu OP-AMP lar ile hazırlanmış bir devre ile gerçeklenmektedir. Şekil 5’te düzeneğin ön paneline ve eş değer devreye ilişkin yapı görünmektedir.
Şekil 5: PD Denetleyici Yapısı
Burada kullanılan devre yapısı tam PD denetleyici yapısına karşılık gelmemektedir. Bunun sebebi fazladan eklenmiş olan 2R elemanıdır. Buradaki amaç türev işleminin keskinliğini azaltmaktır. (Türev + Filtre olarak düşünülebilir)
Devre elemanları kRRF 221 , 1002R ve FC 1 şeklinde seçilirse, denetleyiciye ait transfer fonksiyonu aşağıdaki gibi olacaktır.
10000
10000221)(
s
ssWd (15)
Şekil 6’da sistemin tam blok diyagramı verilmiştir.
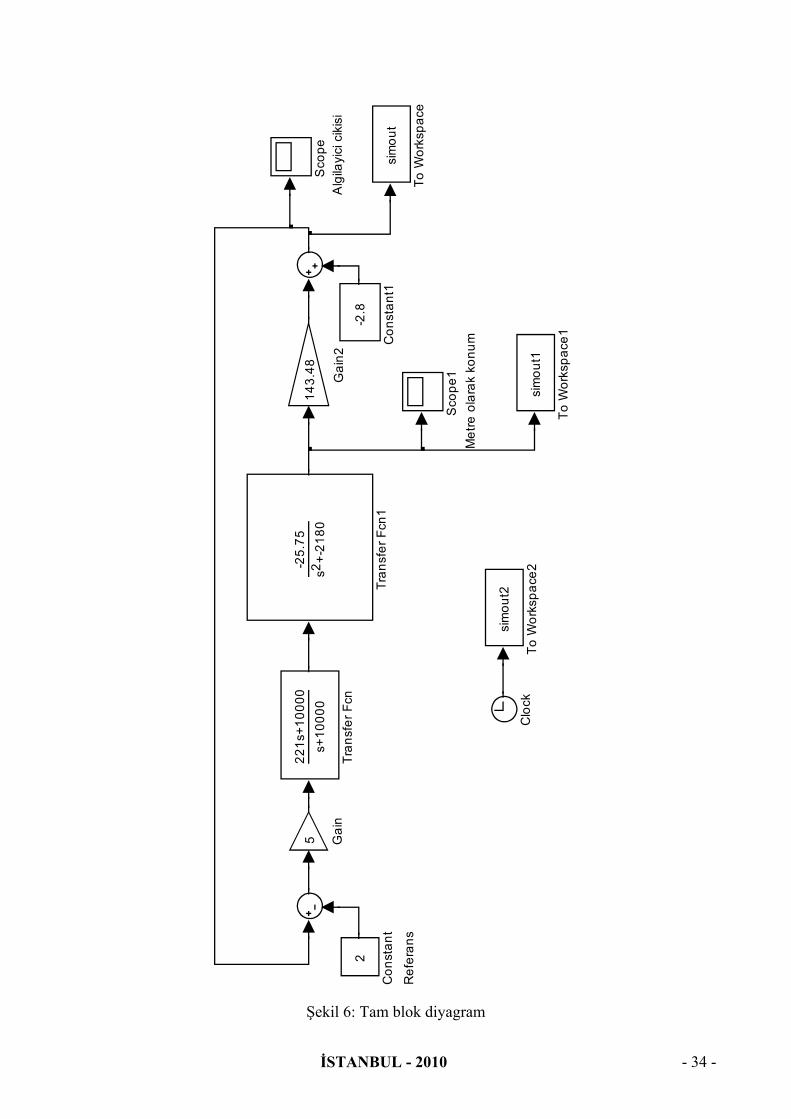
İSTANBUL - 2010 - 34 -
Şekil 6: Tam blok diyagram
Alg
ilayi
ci c
ikis
i
Me
tre
ola
rak
kon
um
Re
fera
ns
-25
.75
s +
-21
80
2
Tra
nsf
er
Fcn
1
22
1s+
10
00
0
s+1
00
00
Tra
nsf
er
Fcn
sim
ou
t2
To
Wo
rksp
ace
2si
mo
ut1
To
Wo
rksp
ace
1
sim
ou
t
To
Wo
rksp
ace
Sco
pe
1
Sco
pe
14
3.4
8
Ga
in2
5 Ga
in
-2.8
Co
nst
an
t1
2
Co
nst
an
t
Clo
ck

İSTANBUL - 2010 - 35 -
Bu düzeneğe ait grafiksel sonuçlar Şekil 7 ve 8’ de görülmektedir.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04Sistemin Cevabi
Zaman(sn)
Top
un K
onum
u (m
)
Şekil 7: Metre olarak topun konumu (m)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-3
-2
-1
0
1
2
3Sistemin Cevabi
Zaman(sn)
Alg
ilayi
ci C
ikis
i (V
)
Şekil 8: Algılayıcı çıkışı (V)
İSTANBUL - 2010 - 36 -
Sonuçlardan görüldüğü gibi kararsız olan manyetik top askı sistemi, kararlı kılınabilmesine karşın algılayıcının skalası sebebi ile topun istenilen noktaya taşınmasında sorunlar oluşmasına sebep olmaktadır. Cihaz üzerindeki referans giriş ayarı ile girilen gerilim değerinin kabaca topun konumunu değiştireceğini söylemek daha doğru olacaktır. Algılayıcıdan doğan bu eşleşmezlik ile ilgili bir tablo oluşturmak mümkündür.
Mevcut top konumu (cm) Algılayıcıdan okunan değer (V)0 -2.81 -1.373 1.5
Cihazın maksimum akımı sebebi ile topun ulaşabileceği maksimum uzaklığın sınırlı olduğu da unutulmamalıdır. (Bu düzenek ile 10cm mesafede topun dengede durması mümkün değildir)
5.Deneyin Yapılışı
İlk aşamada deney seti için gerekli olan pasif eleman eklemeleri yapılır ( FR ,2,1 ve C ), bu
elemanların seçimi yapılırken mevcut model kullanılarak, kapalı çevrim sistem köklerinin hangi noktalara taşınması isteniyor ise eleman değerleri ona göre belirlenmelidir.
Daha sonra sisteme enerji verilir ve top, algılayıcının görebileceği bir konuma el ile getirilmeye çalışılır, eğer top havada durmuyor ise gerekli ek ayarlamalar (Kazanç ve Referans değeri) yapılarak tekrar denenir. Top havada durmaya başladıktan sonra ise gene aynı ayarlar değiştirilerek, bu değişimlerin sistem üzerindeki etkileri hakkında bilgiler elde edilir.