el método de arnoldy y los subespacios de krilov · 2014-08-28 · requiere el cálculo de estos...
TRANSCRIPT
Académico / ==--___ --J
El Método de Arnoldy y los subespacios de Krilov
•• ne •••••••••••••••••• • e l ••••••••••••••••••••••••••••
fecha de recepción: Abril 30 de 2009. Fecha de aceptación: Jun io 2 de 2009.
Líder Grupo Matrix -Universidad Militar Nueva Granado . Profesor Ciencias Bósicos -Universidad Libre.
Adrian Ricardo Gómez Plata 1
RESUMEN
Es importante en ciertos problemas de Ingeniería, por ejemplo en los de estructuras o problemas de fluidos, tener que calcular los valores propios o vectores propios de las ecuaciones diferenciales o de los modelos que gobiernan el problema. En este comino se requ iere el cálculo de estos va lores propios extroídos de matrices de gron dimensión , es decir de matrices dispersas, aleatorias o matrices de d imensión mayor a 3 por 3.
En este artículo se p re sentará un algor itmo que permite hacer este t ipo de cálculos con c ierta prec isión y poco costo computacional en compa rac ión con los métodos tradic iona les. En pa rticu lar se com paro el costo computacional con respecto del método de las potencia s; para esto se muestra ciertos esp acios donde se pued en buscar estas aprox imacion es en mat ri ces de gran dimensión, se e jemplifica breveme nte el método y finalme nte se do una apl icación de este hecho o c ierta matriz aleatoria de 5 por 5.
ABSTRACT
It is impo rta nt in some eng ineering problems, for example in the structures orfluids problems, having to calculote the eigenvalues and eigenvectors of the differential equotions or models that govern the problem. In this way requires the calcu lation of these eigenva lues from large motrices, or rondom matrices of size greater than 3 by 3 .
In this article we present an al 9 o r i th m th a t 011 ows s u c h ca lculations with so me accuracy and low computational cost campa r ed

to traditional methods. In particular we compare
the computational cost with respect to the method of powers, for it shows some areas where you can find these approaches in large arroys, the method is exemplified briefly and then give an application of this to so me matrix rondom 5 by 5.
PALABRAS CLAVES
Proyectores ortogonales, subespacios de krilov, valores y vectores propios.
KEYWORDS
Orthogonal projection, s u bspa c e s of Kri l ov , eigenva lues and eigenvectors.
INTRODUCCiÓN
Sea
1 O O 2 O
3 4 O 5 O
A= 6 O 7 8 9
O O 10 11 O
O O O O 12
una matriz aleatoria de 5 x 5. Al intentar usar la ecuación característica de dicha matriz se encue ntra que hay que resolver 5 determinantes de
Véase Laub A. J . pp . 75-89.
4 por 4 que a su vez son 20 determinantes de 3 por 3. El
calculo es sobredimensional y se agrega el prob l ema que se debe resolver una ecuación de quinto grado, ya sea manualmente o computacionalmente, situación muy poco fioble en esta matriz por el error en el redondeo y de máquino que se hereda en cada cálculo. A cont inuación se presento un marco teórico y un algoritmo que permite hacer estos cálculos computocionalmente con cierta precisión y baj o costo com putaciona l.
1. MARCO TEÓRICO
1.1 Polinomio Mínimo de un vector
Es conocido que el polinomio mínimo de una matriz A es el polinomio de grado mínimo que anula a A y se denota como p(x) .
Para describir el polinomio mínimo p(x) de A EC n xn
considérese la forma de Jordán A2 de A. Supó ngase A =PJP·1,
donde J es una forma de Jordán, es decir.
o ) (1.., )
o
donde
Ll es el bloque 3-esimo de Jordán asociado a A .. ,
Con ) , (1..) = J
[
A 1
C ada bl o qu e de Jordán en j (A) es de tamaño kxk donde,
) )
k¡ =index(A) es decir es el entero pos itivo más pequeño r tal que
rango (A-al )' =rango(A-aly+'.
Aho ra, P (A) =O <=> P(J)=O o equivalentemente que p(JJ=O paro ca da bloque de Jordán J . y P (J J <=> P (;) (A) =O donde
i= 1,2, ... ,k con J. un kxk bloque de jordán as ociado a l valor propio A. Hecho que se da sí y solo sí
P(x) = (x - A) ' q(x).
entonces el po linom io mínimo que aniquila el bloque de Jordán asociado con A es:
donde, k. = in dex (A) , luego el A
polinomio mínimo de A asociado a cada b loque de jordán paro cada A. se puede ver como
)

.. Académico / = '---------------'
m(x) = (x - A,)" (x- ~)', ... (x - Aj' donde
' - 1 donde k,=index(A)- A' b = I \A' b
• Definición 1 :
El polinomio mín imo de un vector v E C"n relativo a A E Qrrn
es el polinomio mónico p(x/*O que cumple p(A) =0.
Ejemplo: A l calcu lar p(x) para
se ti ene
p (x) = (x - 1Xt - 2) = X2 - 3x + 2
1.2 Secuencias de Krilov
Sea vECn,n y A EC"·"' . La
sucesión v,Av,Alv,... es llamada la secuencia de Krilov3 para A.
Una aplicación de las sucesiones de Krilov es el cálculo de l po linomio mínimo de un vector. Si A'b es el primer vector en la secuencia de Krilov que es una combinación lineal de los precedentes ve cto res de Krilov, entonces e l po l inomio m ínimo de un vector se calcu la
k-I
p(x) = x ' - I u ,x J
) =0
}:O
Ahora podemos decir que es el subespocio de krylov asociado a una matriz.
El subespacio de Krilov es el subespacio de todos los vectores el cua l puede ser escrito como x =P(A)V, donde P es un po linomio que no excede el grado m-l.
Se puede ver que este subespacio es
Km = span{ V,A" A2V, ... . , Am-IV}
Partiendo desde la fórmulo de itera c ión de l método de las potencias:
Para esto hagamos, v¡ ~v¡=[a,b,el ,
A¡ =max{ la l. Ib l ,Iel l,
1 1 v, =-Av, =-A [a,b,c]
A, A, L l amondo v 1= [ d ,e,f], A1=/1Wx{ ldl,Iel. lfll se tiene
I I 1 1 I 2 I'J = ¡- A [d.eJ] = ¡- AV2 = J: A '1 Av¡ = 1""7 A VI
. .. " .,A,
V =~ AV =~A -'_ A ' V = _ I _ A' V • ~, ' A, 1..,\ ' A, )',\ '
Véase Saad, Ite ra tive Methods fo r soprse linear Systems, pag inas 168-17 1.
por inducción
v = 1 An-IV. n- l oo o 1
1\.."_ 11\,,,_ 2 " ·1\..1
Además se puede ver que si
1 V = A A V;, entonces
/1 - ] '" 1
K m =spam {V,A V,A ' V, .. ,An·¡ v}, x =P(A)V
Proposición 1: Sea f.l el grodo del polinomio minimal de v.
Entonces K,. es invarionte bajo
A(AK,C K) y K,=Km
para todo m~f.l .
Proposición: El subespocio de Krilov K es de dimensión m sí
m
y sólo sí el grado del pol inomio minimo l de v con respecto a A es a lo más 111-1 .
Prueba. Los vectores V,A V, ... , Am. ¡V forman uno base para Km sí y sólo sí para una m-apla compleja (,-;*0, i = 0, .. . ,m-1Ia combinación
lineal I:u ,AiV * O . i=O
Esta condición equivale a dec ir que no existe ningún polinomio de grado <:' m-1 tal que P(A)V=O.
Propos ic i ó n 2: Seo Q un m
proyector dentro de K , es m
decir A =Q A" entonces para un pol¡'~ omn¡o ~ de grado no

mayar que m-l, se tiene que q(A)
V=q(A,JV y para un polinomio de grado S m, se tiene que
Qmq(A) V=q(A,J V
Prueba. Es suficiente probar por inducción las propiedades para un polinomio monico q,(t)=qi,i=O, ... ,m-l.
2. APLICACiÓN AL ALGORITMO DE ARNOLDY
2.1 Método de Arnoldy
Es un método de proyección ortogonal ' sobre Km para matrices no hermitianas (fue introducido en 1951 por ARNOLDY)
• Algoritmo de Arnoldy:
Es construido sobre bases ortogonales del subespacio de Krilov K .
m
l. Elija un vector V¡ tal que
IIV¡II,= 1
2 . Itere: para ) = 1, 2, ... ,m co mpute h ij = (Av)' Vi ) , 1= 1, 2, ... ,) ,
j
wj =Av j - ~)ij ' hj+¡)Iw)l, si i= l
h}, Ij =0 deténgase. Vj+, = 3
hj +1,j
si w} ~ O el algoritmo se detiene.
Propo sic ión 3 : Los vectores v¡,v]" ",vm forman una base ortonormal del subespacio Km =spam{ v¡,Av¡,A' v¡, ... ,Am'¡vJ.
• Definición 2:
Si a .. =O para un par 1,) tal que i > lj
) + l. La matriz formada con estas características en sus entradas se llama Matriz superior de Hessenberg.
* * * * * * * *
H s = O * * * Ejemplo: O O * *
O O O *
Proposición 4: Denótese por Vm
una matriz de nxm con vectores
columna vf"'" vm y Hm la matriz HessembergS definida a partir del algoritmo de Arno ldy. Entonces V'AV=H
m
r-:;lIvlJ~lJ~~1 + W eH ~~ ~~ m m
H m
Proposición 5: El algoritmo de Arnoldy rompe en el paso) sí y sólo sí el polinomio minimal de V, es de grado j. Sin embargo, en este caso el subespacio lS es invariante y la aproximación de los valores y vectores propios son exactos.
E¡emplo del algoritmo:
Véase Meyer en Motrix Analysis, pág inas 405-437.
Véase Stewart, Motrix Algoritms, volumen 1, página 5.
Sea
l. Elijamos V} =(1,0,0)
2. Para J =1,2, ... m,i=1,2, ... ,j si ) =1,i,=1
Hi¡ =(A V!, V) =((5,-4,-4),(1 ,0, 0)) = (5,-4,-4).(1,0,0)'=5
, W¡=A V¡ -D ¡V=(5,-4,-4) -h l/ V¡ =
i=1 r;
(5,-4,-4)-5(1, 0, 0)=(0,-4,-4)
hj+¡)= h 21 = IIw ¡lb=II(O, -4,-4) 11 = /(0,-4,-4), (0,-4,-4) = 10+ 16+ 16 =
{32
Como h,.¡ 7; O se puede seguir calculando.
W 1 V +, = V, = - ' = (0,-4,-4)
J h,., 32
empiezo nuevamente con V,.
La matri z H de Hessenberg m
extraída del algoritmo es
A cadémico / ==------~
hl•3
] ~,3 ,," ,3
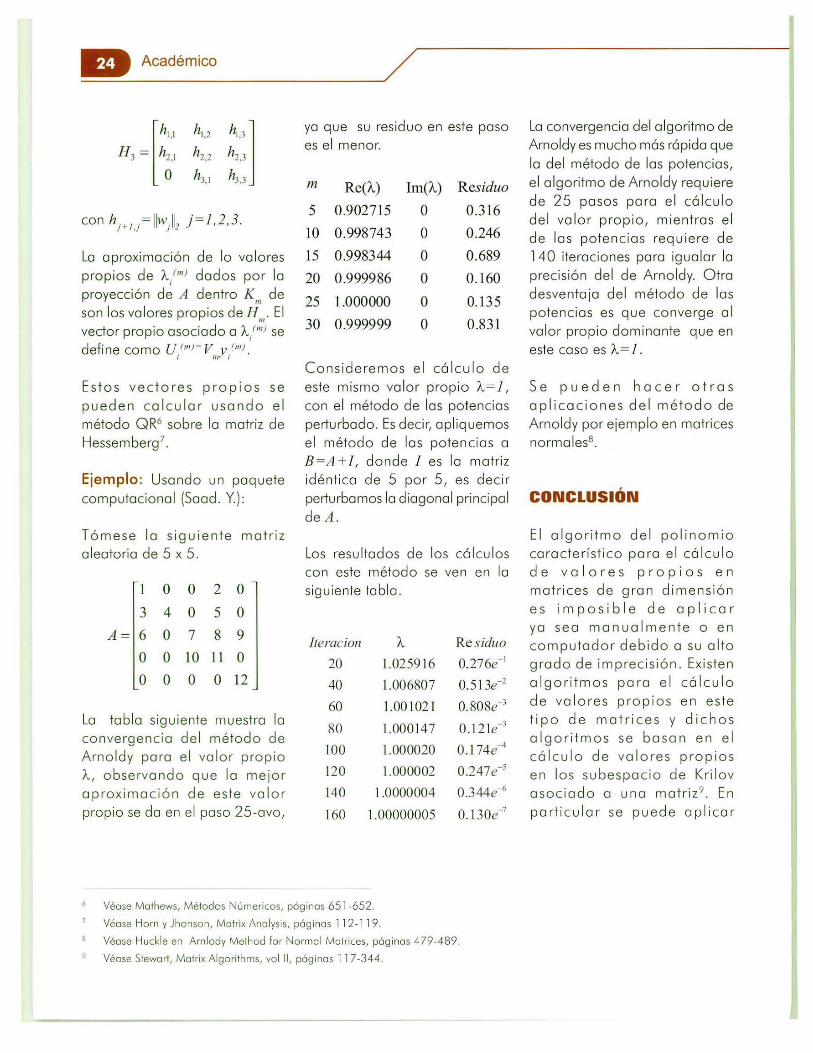
La aproximación de lo va lores propios de A/m
) da dos por la proyección de A dentro K de
m
son los va lores propios de Hn
, El vector propio asociado a \ (m) se define como v ( m) = V v ( m)
, nY '
Estos vectores propios se p ueden calcular usando e l método QR6 sobre la matriz de Hessemberg'.
Ejemplo : Usando un paquete computacional (Saad. Y.) :
Tómese la sigu iente mat ri z a lea torio de 5 x 5.
I O O 2 O
3 4 O 5 O
A= 6 O 7 8 9
O O 10 I I O
O O O O 12
La tab la siguiente muestra la convergen ci a del métod o d e Arnoldy para el va lo r propio A, obse rvando que la mej o r aproxima c ió n de es te val or propio se da en el paso 25-avo,
ya que su res iduo en este paso es el menor.
m Re(A) Im(A) Residuo
5 0.902715 O 0.316
10 0.998743 O 0.246
15 0 ,998344 O 0.689
20 0.999986 O 0.160
25 1.000000 O 0,135
30 0.999999 O 0.831
Consideremos el cá lc u lo de este mismo valor propio A= 1, con el método de las potencias perturbado. Es decir, apliquemos el método de las potenc ias a B =A + J, donde 1 es la matriz id éntica de 5 por 5, es deci r perturba mos la diagonal principal deA.
Los resultados de los cálculos co n este método se ven en la siguiente tab la.
]¡eraciol1 A Re siduo
20 l.0259 16 0.276e- ' 40 l.006807 0.513e-2
60 1.001021 0.808e-J
80 1.000147 0.12Ie-J
100 1.000020 0.174e-4
120 1.000002 0.247e-s
140 1.0000004 0.344e-6
160 1.00000005 0.130e-7
Véase Mothews, Métodos Númericos, páginas 651 -652 .
Véase Horn y Jhonson, Matrix Anolysis, páginas 11 2-119.
Véase Huckle en Arn lody Method for Normal Motrices, páginas 479-489 .
Véase Stewart, Matrix Algorithms, vol 11 , pá ginas 11 7 ~ 344.
La convergencia del algoritmo de Arnoldy es mucho más rápida que
la del método de las potencias, el a lgoritmo de Arno ldy req uiere
de 25 pasos para el cálculo del valor propio, mientras el de las poten cias requiere de 140 iteraciones para igualar la precisión del de Arnoldy. Otra desventa ja del método de las potencias es que converge al va lor propio dominante que en este caso es A= /.
Se pueden ha c er otras ap l ic a ciones de l métod o de Arno ldy por ejerrp lo en matrices norma lesB
CONCLUSiÓN
El a lgori t mo del polinomio caracter íst ico para el cálcu lo de v alore s propios en matr ices de gran d imens ión es impos i ble de ap li car ya se a man ualmente o en compu tado r deb id o a su alto grad o de imprecisión. Existen algoritmos para el cálculo de valores propios en este tipo de matri c es y dichos a lgo r itmos se b as an en el cálc u lo de va lores p ropio s en los sube spa c io d e Kri lo v a sociado a una matriz9 En particular se puede aplicar
el método de las potencias 'o para calcular el valor prop io dominante de la matriz ya que la convergencia del método está garantizada, sin embargo el costo computacional de este cálculo es a lto y po r eso se prefiere usar el método de
BIBLIOGRAFíA
GÓMEZ PLATA, A.R. Uso de l a
Arnoldy ya que este calcula los valores propios de una
mat ri z sin importar si éste es dominante o no, con un costo computac ional más ba¡o que el de las potencias. Las apl icaciones de Ingeniería usan matrices Normales "
2005, páginas 75 -89, ISBN 0-89871-
descomposición Toepl i tz para la 576-8.
estratificación de matrices, Bogotá, Revisto
de Ciencia e Ingeniería Neogranad ina, MATHEWS, J. H.; KURTIS, D.F. Métodos
página 5-12. ISSN 0124-81 70 . numéricos con Motlob, Tercero Edición,
Madrid, Peorson Educación, 2000, páginas
HORN, R.; JONSON, C. Motri, Análysis, 651-652, ISBN 84 -8322 -181-0.
Cambridge Press University, 1990, póginas
112-119. ISBN 978-0521386326. MEYER, C. Mafrix Ana lysis and Linear Algebro
Appl ied. Phi lodelphio, Librory of Congress
HUCKLE, T . "Arnoldy Method for Norma l Cotaloging-in-Publication Doto, SIAM, 2005,
Motrices", Ph ilodelphio, SIAM ¡ourna!' páginas 403-421. ISBN 978-0898714548.
Matri, Anna ls Ap1l15. 1994, páginas 479 -
489 . ISSN 0895-4798. SAAD, Y. Iterotive Methods for Sparse
Linear Sys te ms. Segunda Edicion.
por lo que este método tiene acogida porque puede mane¡ar un gran subespacio de matrices Normales. La desventa¡a del método es que no se puede usar en aplicaciones donde intervengan matrices Hermitianas.
Numerical Methods fer
lorge eigenvolues problems. Oxford
rd , Manchester, UK. Manchester
University Press 1992, páginas 110-
113. ISBN O 7190 33861.
STEWART, G. W. Matri, Algarithmso
Volumen 1. Philadelphia, Library of Congress
Cataloging-in -Publicotion Data, SIAM,
1998, pág ina 5, ISBN 978-0-898714-
14-2.
____________ . Motr ix Algorithms:
Volumen 11. Philode lphia, Librory of
LAUB, J.A. Matrix Analys is fo r Scientists & Philodelphio, LibraryofCongressCata loging- Congress Cataloging-in-Publication
Engineers. Phi ladelphia: LibraryofCongress in-Publ icotion Data, SIAM, 2003, páginas Data, SIAM, 1998, páginas 117 -334,
Catalaging -in -Publication Doto, SIAM, 168-1 71, ISBN 0-89871-534-2. ISBN 978~O~898714- 14-2.
10 Véase Sood, Numerical Methods for lorge eigenvalues problems, páginas 110-113.
Véase Gómez, Uso de la descomposición Toepl itz poro lo estratificación de motrices, páginas 5-12.