effective coupling of signal timing estimation model and ...docs.trb.org/prp/14-4957.pdf · 1...
TRANSCRIPT

Effective Coupling of Signal Timing Estimation Model and Dynamic Traffic Assignment in 1
Feedback Loops: System Design and Case study 2
3
4
5
6
7
8
Milan Zlatkovic 9 Research Assistant Professor 10
Department of Civil and Environmental Engineering 11
University of Utah 12
110 Central Campus Dr., Rm. 2000B 13
Salt Lake City, Utah 84112 14
Phone: (801) 819-5925 15
Fax: (801) 585-5860 16
E-mail: [email protected] 17
18
19
20
Xuesong Zhou* 21 Associate Professor 22
School of Sustainable Engineering and the Built Environment 23
Arizona State University 24
Tempe, AZ 85287, USA 25
Email: [email protected] 26
27
*Corresponding Author 28
29
30
31
32
33
34
35
36
37
38
Word Count: 5739 + 1750 (5 Figures + 2 Tables) = 7489 39
40
41
Submitted for publication and presentation considerations at the 93rd meeting of the 42
Transportation Research Board 2014 43
44
45
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 2
ABSTRACT 1
This paper presents an integrated framework for effective coupling of a signal timing estimation 2
model and Dynamic Traffic Assignment (DTA) in feedback loops. There are many challenges in 3
effectively integrating signal timing tools with DTA software systems, such as data availability, 4
exchange format, and system coupling. In this research, a tight coupling between a DTA model 5
with various queue-based simulation models, and a Quick Estimation Method (QEM) Excel-6
based signal control tool is achieved and tested. The presented framework design offers an 7
automated solution for providing realistic signal timing parameters and intersection movement 8
capacity allocation, especially for future year scenarios. The framework was used to design an 9
open-source data-hub for multi-resolution modeling in Analysis, Modeling and Simulation 10
(AMS) applications, in which a typical regional planning model can be quickly converted to 11
microscopic traffic simulation and signal optimization models. The coupling design and 12
feedback loops are first demonstrated on a simple network, and we examine the theoretically 13
important questions on the number of iterations required for reaching stable solutions in 14
feedback loops. As shown in our experiment, the current coupled application becomes stable 15
after about 30 iterations, when the capacity and signal timing parameters can quickly converge, 16
while DTA’s route switching model predominately determines and typically requires more 17
iterations to reach a stable condition. A real-world work zone case study illustrates how this 18
application can successfully be used to assess impacts of road construction or traffic incident 19
events that disrupt normal traffic operations and cause route switching on multiple analysis 20
levels. 21
22
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 3
1. INTRODUCTION 1
Dynamic traffic assignment (DTA) models have been increasingly recognized as an important 2
tool for assessing operational performances at different spatial, and across various analysis 3
temporal regimes. The advances of DTA in this aspect are built upon the capabilities of DTA 4
models in describing the formation, propagation and dissipation of traffic congestion in a 5
transportation network. Planning practitioners have recognized the full potential of DTA 6
modeling methodologies that describe within-day and day-to-day network-level and corridor-7
level congestion in a transportation network with Advanced Traffic Management and Advanced 8
Traveler Information provision strategies (1). 9
The coupling of traffic assignment and signal control has long been a focus of numerous 10
research efforts. However, due to the complexity of the problem, usually one of two approaches 11
is used: (a) assuming fixed signal control (capacities) and using DTA to perform network 12
loading; (b) assuming fixed traffic assignment and performing signal control evaluation and 13
optimization (2, 3). Model coupling can be achieved on multiple levels, such as full integration, 14
close coupling, loose coupling and isolated approach (4, 5). 15
While leading-edge research is underway that will significantly advance transportation 16
modeling practices, current signal timing estimation tools (e.g. Synchro, TRANSYT-7F, 17
PASSER) have not been designed to facilitate integrated modeling and practices in combining 18
signal timing and DTA, so these processes are largely ad-hoc and relatively inefficient. Many 19
planners have found numerous challenges in effectively integrating signal timing tools with DTA 20
software systems, such as data availability, exchange format, and system coupling. Determining 21
accurate signal timing data requires precise inputs on intersection geometry and turning volumes. 22
The types of data required for inputs into models are not available, or are difficult to obtain from 23
existing regional planning data, which typically only have the number of through lanes as link 24
level attributes. External data sources, particularly movement-specific attributes, can be coded in 25
signal timing package’s format, such as Synchro’s Uniform Traffic Data Format (UTDF). 26
Although these data are becoming increasingly available for use in transportation planning 27
applications, the data sources are not yet easily integrated into standard regional planning 28
practices and still require significant labor resources to map signal locations, and convert the data 29
to a useful format for existing DTA packages. 30
In the current planning practice, the lack of standardized signal data formats calls for 31
manual manipulation or customization of utility tools to interface between planning models and 32
signal timing estimation models. One solution to this challenge is to develop an open data format 33
that allows software vendors and planners to implement data conversion utilities from their own 34
proprietary format. For maximum effectiveness, this research develops open data format through 35
a publicly visible, vendor-independent process to ensure interoperability among diverse traffic 36
modeling and simulation tools. 37
Although a full integration approach that builds both signal timing estimation and DTA 38
on same design is desirable for multi-resolution modeling, this approach makes the extensions of 39
individual models very difficult. Therefore, a tight coupling approach that can use well defined 40
data format to transfer data files between different resolutions of common models is more 41
desirable in order to achieve scalability, modularity, interoperability, and extendibility. Along 42
this line, the individual models can be developed on the modular basis, where each module can 43
perform its function and can be easily connected and extended to meet future modeling needs. 44
One of the most significant gaps in the functionality of current multi-resolution modeling 45
systems is the lack of behavioral response associated with (1) capacity allocation at signalized 46
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 4
intersections, (2) traffic congestion due to route diversion and (3) other demand management 1
strategies such as road pricing. Transportation models in many cases require significant 2
manipulation and calibration to produce reasonable results for networks that are over saturated 3
and/or include demand management strategies that affect travelers’ choice of mode, departure 4
time, and route. However, by only focusing on the “demand” side of congestion modeling, many 5
transportation analyses do not reflect the true effects of operating conditions, particularly when it 6
comes to examining signalized intersection performance over multiple days for the purposes of 7
estimating reliability. Therefore many practitioners have observed a critical need for a seamless 8
feedback loop between DTA and signalized intersections capacity allocation. 9
The demonstration prototype of this study aims to integrate an open-source DTA system, 10
called DTALite, with an Excel-based signal timing estimation tool, called the Quick Estimation 11
Method (QEM). Specifically, a tight coupling between the two models has been developed, 12
enabling a simultaneous assessment of traffic assignment and traffic signals, through an open-13
source Analysis, Modeling and Simulation (AMS) data-hub, namely Network Explorer for 14
Traffic Analysis (NEXTA) GUI. The integration of the two models and the feedback loop 15
procedure are described on a simple two-route network, and their full capabilities are 16
systematically tested on a real-world network with a work zone application example. The 17
developed QEM tool can be also easily coupled with other DTA packages, such as 18
DYNASMART and TRANSIMS, as AMS data hub can serve as a data exchange utility for a 19
number of simulation packages. 20
Majority of research in the combined traffic assignment-traffic control environment has 21
been performed for either DTA and fixed signal control, or static assignment and signal control 22
optimization. One mathematical formulation that uses incremental assignment logic is presented 23
in (6) and (7). This is basically an extension of signal optimization under the static assignment, 24
where the signals were repeatedly adjusted for small added portions of the demand until the total 25
demand was loaded. Another conceptual solution framework consisting of two interactive loops 26
for the combined optimization problem is described in (8). However, very limited real-world 27
implementation or numerical application with widely used signal timing standard (e.g. HCM 28
methodology) was performed within the proposed framework. A mathematical formulation and 29
heuristic simulation-based procedure to obtain time-varying assignment of OD vehicles to paths 30
jointly with time-varying signal settings that seek to optimize the total travel time in the network 31
is given in (2). This framework was tested on the Dallas-Fort Worth network with three 32
congestion levels. The implementation of the designed algorithm decreased average travel times 33
in the network, and showed promising results related to the convergence. Another integrated 34
framework that uses the game theory to model the combined DTA-traffic signal problem is 35
explored in (9). In their research, the dynamic traffic control problem and DTA are integrated as 36
a non-cooperative game between a traffic authority and highway users. 37
Bi-level programming and optimization has been widely used to examine the combined 38
DTA-traffic control problem. Sun et al. (3) developed a bi-level programming formulation and 39
heuristic solution approach for dynamic traffic signal optimization in networks with time-40
dependent demand and stochastic route choice. In their solution approach, Genetic Algorithm is 41
used to find the upper level signal control variables, Incremental Logit Assignment is developed 42
to find the user optimal flow pattern in the lower level problem, and Cell Transmission 43
Simulation is implemented to propagate traffic and collect real-time traffic information. The 44
study showed that the heuristic solution approach can provide a realistic representation of traffic 45
operation in both network and link level operational performance. Another bi-level formulation 46
for the combined dynamic equilibrium and signal control, presented in (10), defines a signal 47
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 5
control operator in the upper level that optimizes the signal setting to minimize the system travel 1
time, while the road users in the lower level minimize their own costs, leading to dynamic user 2
equilibrium. The projection algorithm was used to solve the lower level, and the mixed integer 3
programming solver to solve the upper level. The algorithm was successfully tested on 4
hypothetical networks with one and multiple signalized intersections. 5
Focusing on effective software system integration for transportation planning 6
applications, our paper presents a data exchange and software coupling framework in which two 7
models, DTALite (as a representative mesoscopic DTA package) and QEM signal timing 8
estimation, are successfully linked to address practical needs for providing realistic signal timing 9
parameters and intersection movement capacity allocation, especially for future year scenarios. 10
The next section provides descriptions of the general DTA assignment-simulation model and 11
computational engine. The QEM signal timing methodology and application are described in 12
section 3. Section 4 describes the coupling of the two models and demonstrates the feedback 13
loop and their convergence on a simple two-route network. The framework is tested on a real-14
world network with a work zone implementation in section 5. 15
16
2. MODELING COMPONENTS OF MESOCOPIC DTA PACKAGES 17
As a newly developed open source DTA package, DTALite uses a number of computationally 18
simple but theoretically rigorous traffic queuing models in its lightweight mesoscopic simulation 19
engine. Similar to many existing mesoscopic DTA packages, the four major modeling 20
components in the DTALite system architecture are summarized as follows: (i) Time-dependent 21
shortest path finding based on a node-link network structure from regional planning models; (ii) 22
vehicle/agent attribute generation that converts OD demand matrices in conjunction with 23
additional time-of-day departure time profile, as well as possible variable value of time 24
distribution. (iii) DTA method that considers major factors affecting agents’ route choice, such 25
as different types of traveler information and road pricing strategies, and (iv) a wide range of 26
traffic flow models, namely point queue, spatial queue with jam density constraint and simplified 27
kinematic wave models, are available to model essential road capacity reduction or enhancement 28
measures. 29
The traffic assignment and simulation modules are integrated and iterated to either 30
capture day-to-day user response, or find steady-state equilibrium conditions. Within this 31
simulation-assignment framework, the rich set of output data include traffic MOEs at different 32
spatial and temporal scales, ranging from network, corridor-level, links and movements. Typical 33
speed, volume and density measures and agent-based trajectories can be visualized and 34
processed through the NeXTA user interface. Overall, DTALite uses a link-based and 35
movement-based simulation architecture with capacity constraints at both link and movement 36
levels. The capacity constraints make calibrating network capacities a very important step in the 37
process of building our models. On the other hand, the open-source code base, accessible at 38
https://code.google.com/p/nexta/, can be flexibly used to enhance to meet specific modeling 39
needs. 40
41
3. QEM METHODOLOGY AND EXCEL-BASED APPLICATION 42
By adapting the methodology from Highway Capacity Manual (HCM) 2010 (11), QEM is a 43
simplified method for determining the signal timing parameters, critical intersection volume-to-44
capacity (V/C) ratio, and delay for a signalized intersection. To reduce the data input efforts for 45
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 6
DTA and other planning applications, this methodology requires only minimal intersection 1
geometry and traffic data, such as the approach lane configuration and turning volumes. It 2
assumes certain default values for some of the variables which are integrated into the calculation 3
methodology. QEM provides approximate intersection performance results for the known signal 4
timing parameters, or calculates the signal timing using a simplified calculation procedure based 5
on the critical movement methodology. 6
The QEM Excel-based calculation engine can perform signal timing calculation and 7
capacity assessment of signalized intersections based on the user-defined inputs, or inputs passed 8
to it through AMS applications. The QEM Excel tool also uses some additional signal timing 9
calculation, given in the Signal Timing Manual (12) and Utah Department of Transportation 10
(UDOT) standards (13). It can work as a stand-alone application, or integrated with NeXTA. The 11
QEM software package can be downloaded at 12
https://drive.google.com/?tab=wo&authuser=0#folders/0Bw8gtHCvOm7WTjg0a2FvdlhrRjQ. 13
The QEM calculation steps are given in Figure 1. 14
15
16
FIGURE 1 QEM calculation steps. 17 18
Based on the given inputs, this step first determines the intersection major and minor 19
approaches, and then sets the initial phase numbers to through and left turns Once the initial 20
phasing is selected, the spreadsheet determines the left turn treatment as protected only, 21
protected plus permitted, or permitted only for each intersection approach. After the left turn 22
Geometry, volume and
calculation inputs
Phase designation
Left turn treatment
Dual ring-barrier structure
Lane group volumes
Signal timing parameters:
cycle, green times, capacity,
V/C, delay, LOS, status
Outputs:
Visualization,
NeXTA GUI
Inputs
Step 1
Step 2
Step 3
Outputs
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 7
treatment is selected, the dual ring-barrier phase structure is defined, with all phases which are 1
used in the given case. 2
The second step uses the given intersection geometry and traffic inputs, and applies the 3
HCM methodology to compute lane volumes for each lane group. This procedure takes into 4
consideration the number of lanes for each approach, lane assignment, right-turn-on–red 5
volumes, and left turn treatment. These volumes are then used in the follow-up calculations. 6
Once the phasing plan, left turn treatment and lane volumes are known, signal timing 7
parameters can be computed in the third step as follows: 8
a) Compute saturation flow rates for protected, permitted and protected plus permitted 9
movements 10
b) Compute critical phase volume and lost time 11
c) Compute critical sum and cycle lost time 12
d) Determine cycle length 13
e) Compute phase green times and splits 14
15
The critical phase volume (CV) is the volume for the movement that requires the longest 16
green time during the phase. A phase plan summary table, which includes movement codes and 17
sequences from previous steps, is used to determine the phase plan summary and identify the 18
critical sequence of movements within the signal cycle. This table also determines the lost time l 19
assigned to each phase. When all phases have been completed, the critical sum (CS) of the 20
critical phase volumes is computed. The cycle lost time L represents the sum of the phase lost 21
time for each of the critical phases. 22
Once the critical phases have been determined and CV, CS and L computed, the cycle 23
length is calculated as: 24
25
(1)
26
Where: 27
28
C – Cycle length (s) 29
Cmin – Minimum cycle length (s) 30
Cmax – Maximum cycle length (s) 31
L – Sum of cycle lost time (s) 32
CS – Critical sum (veh/h) 33
RS – Reference sum flow rate (veh/h), 34
PHF – Peak Hour Factor 35
fa – Area type adjustment factor (0.9 for Central Business District – CBD, 1.0 36
otherwise) 37
38
When the cycle length is determined, the spreadsheet calculates phase split (inter-green) 39
times g for the phases determined in the ring-barrier structure. These times are determined by the 40
following equation: 41
42
(2)
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 8
1
where g is the phase split time (s), CV is the critical phase flow rate (veh/h), and gmin is the 2
minimum split time, which is set to nine seconds in the algorithm. 3
Furthermore, the spreadsheet calculates additional phasing data, such as the effective 4
phase green times and capacities based on the HCM methodology, and yellow, red clearance, 5
pedestrian walk and flash-don’t-walk times, based on the methodology described in (12) for the 6
given intersection geometry and traffic characteristics. When all the data are known, the 7
spreadsheet produces the intersection MOEs, which include capacities and V/C ratios for all 8
movements, as well as the critical intersection V/C, control delay per vehicle, intersection LOS 9
and intersection status. 10
As an important level of service measure, the control delay in the spreadsheet is 11
calculated as the sum of the uniform delay, which is the delay that occurs if arrival demand in the 12
lane group is uniformly distributed over time, and the incremental delay, which accounts for 13
some randomness in vehicle arrivals. The uniform and incremental delays for each lane group 14
are calculated as follows: 15
16
(3)
(4)
(5)
where X is the lane group V/C ratio, c is the lane group capacity (veh/h), T is the duration of the 17
analysis period (h), and other variables as previously defined. The critical intersection V/C ratio 18
XC is calculated as follows: 19
20
(6)
21
The calculated intersection parameters and MOEs are communicated back to the user, 22
and the interface depends whether the QEM spreadsheet is used as a stand-alone application, or 23
integrated with NeXTA. If used as a stand-alone application, the user can view the results in a 24
specially designed Summary Sheet, or can export them as a PDF report. In NeXTA, the user can 25
select and view the intersection results in the node editor. 26
27
4. COUPLING QEM AND DTA SOFTWARE PACKAGES 28
Figure 2 shows the model coupling, information flow and feedback loop between simulation and 29
signal timing estimation modules. 30
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 9
1 2
FIGURE 2 DTALite and QEM coupling and feedback loop. 3 4
In order to fully integrate multiple stand-alone models or simulation programs, it is 5
important to standardize data exchange between those tools at different levels of resolution. In 6
addition, open standard will enhance the interoperability of simulations (or applications or 7
systems) to coordinate and work together in a common (virtual) environment. This ability 8
requires the AMS architecture to be built on a common understanding of data schema for traffic 9
modeling and simulation, in particular, transportation network, traffic demand, traffic control 10
devices as well as traffic sensor data. The data formats typically used in the system coupling 11
consist of customized binary files, comma-separated values (CSV), Extensible Markup Language 12
(XML), and database formats. In this research, we use CSV format, which allows a successful 13
and rapid integration with other modeling tools, creating a feasible environment for cross-14
resolution modeling applications. In Table 1, we provide a summary of different model coupling 15
approaches that can be used to integrate two software systems. In our software prototype, the 16
tight system coupling between the two models is implemented through Excel-based data 17
exchange interfaces, such as Excel Automation. Based on a subset of Component Object 18
Model (COM), Excel Automation is an inter-process communication mechanism created 19
by Microsoft. It has been supported by many programming languages such as C++ and Java. 20
21
Network
geometryNeXTA
OD Demand
matrixDTALite
Node/Link/Zone
Demand type/Vehicle type
Path flow
AMS
Movement fileQEM
Movement
volumes
Simulation
outputs
Movement
capacities
Feedback loop
Output
Visualization
Excel
Automation
Dual ring
phasing
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 10
TABLE 1 Simulation/Model Coupling Approach Comparison Summary 1 2
Approach Key features Advantages Disadvantages
External Executables/
Stand-Alone programs
Use text file as input and
output between programs
Configuration file or batch
file to control iteration flow
Call perform manual
iterations using difficult
programs
No change to existing
programs
Easy programming calling
on the same machine
Easy to be debugged by
planners/models
Ad-hoc one-to-one
program interface
Extensive file exchanges
Loose coupling between
programs
Static or dynamic
programming library
API, Lib, dynamic
linking library (DLL),
OCX, Active X, COM
Users provide simulation-
callable DLL
Simulation programs will
embed the user-defined
library during the execution
of application
Unified programming
interface
Efficient integration for
specific functionalities such
as signal timing control or
vehicle statistic calculation
(trigged by vehicle
movement functions)
Relatively limited
functionalities
Require familiarity of
advanced programming
languages (e.g. C or C++)
Only supports data
exchange on the local
machine
Message passing and
inter-program data
sharing
Common Object
Request Broker
Architecture (CORBA)
Use Interface Definition
Language (IDL) to specify
a mechanism in software
for standardizing the
method-call semantics
between application objects
Written in multiple
programming languages,
integrate large-scale
simulation programs
running on multiple
computers/different
platforms
Extremely complex
programming interface
Web service in cloud
computing
Service provider pool the
processing power of
multiple remote computers
in a cloud to perform
simulation/modeling tasks
Allow integrated data
collection, data sharing
and traffic modeling
Perform simulation tasks
might normally be difficult,
time consuming, or
expensive for an individual
user or a small company to
accomplish, especially with
limited computing
resources and funds
Only suitable to routine
tasks with extensive user
debugging,
Difficult for modelers to
debug and examine
simulation results
3
4
TRB 2014 Annual Meeting Original paper submittal - not revised by author
Zlatkovic, M., and Zhou, X. 11
TABLE 2 Comparison on QEM and DTA Modeling Assumptions and Components 1
2
Level QEM Typical Mesoscopic DTA
Link Lane-by-lane intersection approach
representation; can represent shared lanes
Lane-by-lane link and intersection
approach representation; does not represent
shared lanes
Lane Lane group representation for specific
intersection movements
Lane group representation for links and
specific intersection movements
Demand One hour only (usually peak hour) Any time period within 24 hours, single or
multiple days
Intersection Delay Control delay (uniform plus incremental
delay) Uniform delay only
Queue Spillback Not considered Considered with certain traffic flow models
3
Before performing system-level software integration, we need to systematically compare 4
and understand the modeling assumptions and potential discrepancies between two applications. 5
The detailed comparison on different modeling levels is shown in Table 2. As an intersection 6
analysis tool, QEM requires correct geometric features to perform signal timing estimation. A 7
typical mesoscopic DTA package uses the link-node network representation, so it requires 8
geometric properties of both links and nodes. It can also represent irregular nodes, opposed to 9
QEM that only represents three and four-legged intersections. It is important to recognize that 10
the widely used HCM signal timing parameter estimation and optimization methodology is based 11
on the peak hour in any time period during the day. Therefore, the QEM application only 12
operates with one hour traffic volumes, so the DTA outputs (potentially across different hours of 13
a day) have to be converted to one hour volumes in order to provide consistent input to QEM. In 14
the proposed data flow, we can also use time-dependent loading factors to accurately map 15
demands during the day to different peak periods (e.g. morning peak vs. afternoon peak). 16
Since QEM is a signal timing application, it can represent all signal timing parameters for 17
the given inputs. A typical DTA package has the option to use QEM cycle lengths and effective 18
green times and provide estimated delays. However, from each run of simulation it can calculate 19
the uniform delay only, without the additional incremental delay caused by randomness in 20
vehicle arrivals. As DTALite uses a deterministic queuing model, when the queue spillback is 21
not considered, its simulated delay (from a point queue model) is equivalent to the commonly 22
used uniform delay formulation defined as the following: 23
24
(7)
25
Where: 26
d – average delay per vehicle (s) 27
µ – maximum discharge rate (veh/s) 28
r – phase (movement) red time (cycle minus effective green) 29
λ – vehicle arrival rate (veh/s) 30
C – intersection cycle length (s) 31
32
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 12
In the current form, QEM does not calculate queue lengths, and therefore it is not able to 1
provide information on queue spillback and upstream intersection blockage. On arterial streets, 2
DTALite can use spatial queue models that can determine queue lengths and spillback, so it can 3
assess the impacts of lane blockage. From this comparison, it can be seen that QEM and 4
DTALite supplement each other to provide a detailed analysis on any network level. 5
6
4.1. DTA and QEM Feedback Loop Convergence 7 8
Essentially, the feedback loop in the coupled system operates as the following sequence. 9
10
1) Initial traffic flow volumes are calculated from traffic assignment package based on 11
capacity values associated with BPR functions from the regional planning model. 12
2) As a dynamic, traffic responsive system, QEM determines and changes intersection 13
movement capacities based on the current traffic volumes. 14
3) With re-estimated movement capacity or signal timing from QEM, a DTA program 15
simulates traffic flow along each path subject to the new capacity constraints at each 16
signalized intersection, and then recalculates experienced travel time along each path. 17
The route switching algorithm will use either MSA or proportional switch to adjust path 18
flow volume at different departure time intervals, which further affect link or movement 19
volumes coming through the QEM controlled intersections. Essentially, the new 20
capacities from step 2 can impact DTA and cause traffic rerouting among available 21
routes. 22
4) Increase iteration counter by 1. Check the convergence patterns in assignment travel flow 23
volumes, if the link flow changes between two iterations then go to step 2 to estimate the 24
signal timing parameters, and therefore movement capacities. 25
26
To test the feedback loop and the simultaneous convergence in the DTA-QEM framework, a 27
simple network with two between one origin and one destination is tested. The network is shown 28
in Figure 3 a), and the inputs are as follows: 29
30
Analysis period = 60 min 31
OD demand = 9000 veh/h 32
Freeway distance = arterial distance = 3 miles 33
Freeway free flow travel time = 3 min 34
Arterial free flow travel time = 4.5 min 35
Number of lanes freeway = 2 36
Number of lanes arterial = 3 37
Freeway capacity = 4000 veh/h 38
39
One signalized intersection is assumed to located in the middle of the arterial corridor. 40
The cross-traffic at the intersection is set to be 450 veh/h, with no left or right turns. For 41
simplicity, it is assumed that there is no flow in the opposite direction along the main corridor. 42
The current cycle length, main movement effective green time, capacity, V/C ratio and 43
delay are obtained through QEM for each iteration and for the current volume assigned to the 44
arterial corridor, and that movement capacity is used in the next iteration. The feedback loop of 45
assignment-signal timing adjustment is performed for 100 iterations. The convergence patterns 46
are shown in Figure 3 b) – c), where Figure 3 b) shows a comparison of travel times, Figure 3 c) 47
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 13
shows the movement capacity at the intersection, and Figure 3 d) shows a comparison of 1
demand-to-capacity (D/C) ratios. 2
3
4 a) Two-route network inputs 5
6
7 b) Freeway and arterial travel times from traffic assignment program 8
9
Origin Destination
Freeway
Arterial Signalized
intersection
L = 3 miles
FFTT = 3 min
L = 3 miles
FFTT = 4.5 min
OD demand = 9000 veh/h
450 veh/h
450 veh/h
0
2
4
6
8
10
12
14
16
Tra
vel
Tim
e (m
in)
Iteration number
Freeway TT Arterial TT
TRB 2014 Annual Meeting Original paper submittal - not revised by author
Zlatkovic, M., and Zhou, X. 14
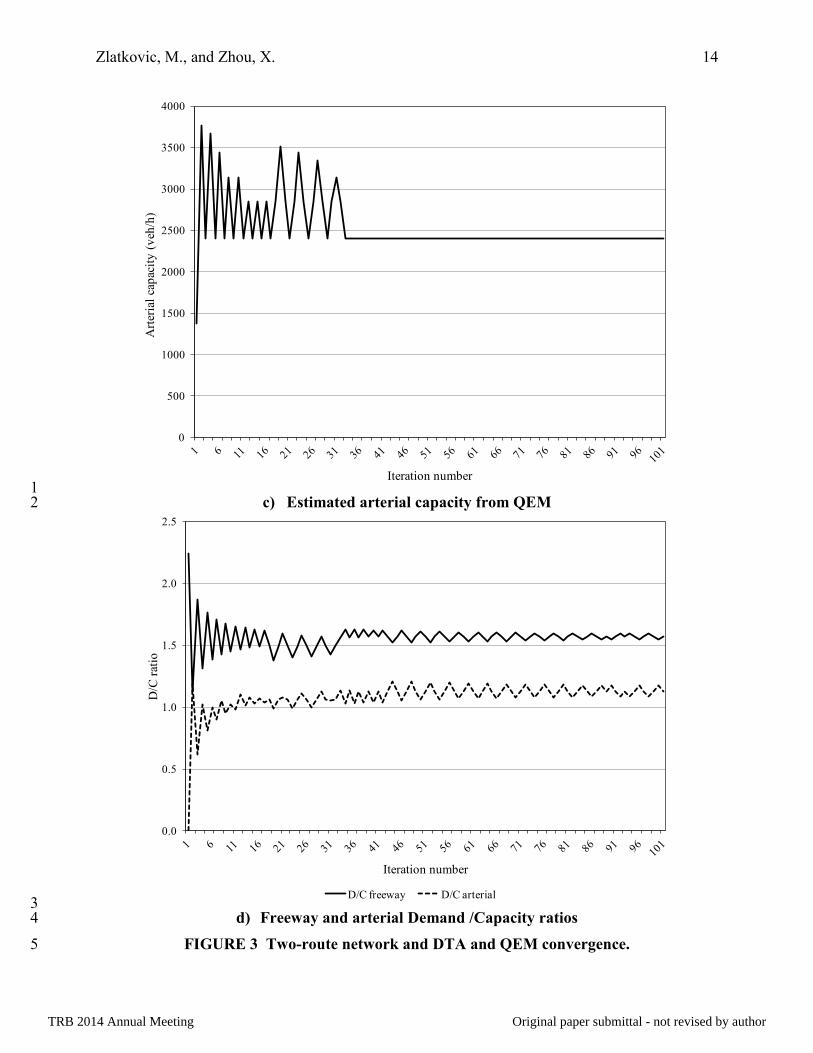
1 c) Estimated arterial capacity from QEM 2
3 d) Freeway and arterial Demand /Capacity ratios 4
FIGURE 3 Two-route network and DTA and QEM convergence. 5
0
500
1000
1500
2000
2500
3000
3500
4000
Art
eria
l ca
pac
ity
(v
eh/h
)
Iteration number
0.0
0.5
1.0
1.5
2.0
2.5
D/C
rat
io
Iteration number
D/C freeway D/C arterial
TRB 2014 Annual Meeting Original paper submittal - not revised by author
Zlatkovic, M., and Zhou, X. 15
The intersection capacity is the best indicator of how QEM responds to changes in traffic 1
patterns. The intersection capacity stabilizes in the area between 30 and 35 iterations. This is 2
approximately where the other parameters converge, with minimal changes in the consecutive 3
iterations. The full travel time convergence, however, is very sensitive to the route switching 4
route used in typical mesoscopic DTA and the underlying traffic flow models. On the other hand, 5
this is a much more realistic representation of real-world conditions, where small travel time 6
variations are always observed due to the nature of random departure time of vehicles even for 7
the same link capacity and the same path flow pattern. The experiment was repeated for different 8
demand levels, geometric properties, freeway capacities and free flow travel times. The 9
outcomes are very similar, with the signal timing parameters (in terms of capacity and assigned 10
signal timing plan) achieving a good convergence in the area between 30 and 35 iterations. 11
Therefore, to achieve the balance between a typical DTA package and QEM for signal timi 12
estimation, we suggest that at least 30 iterations should be used. 13
14
5. WORK ZONE ANALYSIS APPLICATION 15
The coupling of the two modeling tools through a continuous feedback loop in each consecutive 16
iteration provides a basis for a much more detailed traffic analysis for many practically important 17
network capacity improvement or traffic impact scenarios, such as long-term or medium-term 18
work zones or responsive traffic diversion under severe traffic incidents. Freeway work zones 19
have significant impacts within their area of influence, both on the freeway and adjacent 20
arterials. Majority of tools for work zone analysis can estimate these impacts on the freeway 21
level, but not on the arterial level where the freeway traffic is diverted around the work zone. 22
The integrated DTA and QEM tool can overcome this problem and provide impact analysis on 23
both levels. 24
The coupled software system was tested on a real-world network in Salt Lake City, UT, 25
shown in Figure 4 a), for a realistic freeway work zone scenario. The network includes a 4.8-26
mile stretch of I-15, the major arterials in the vicinity, and three freeway ramps. The I-15 27
corridor is split into 13 segments (S1 – S13) for further analysis. A total of 40 signalized 28
intersections are represented in the network. This network is a subarea of the regional 29
transportation planning network, and the current travel demand model and traffic data are used to 30
create and validate the sub-network. The original OD demand matrices were used as input data, 31
while NeXTA’s OD matrix estimation (ODME) feature was used to update the matrices and 32
perform model validation (14). The current AADT values for the freeway and major arterials 33
were obtained from UDOT, rescaled for the PM period directional traffic, and used in the 34
validation process. A total of twenty-six sensor data points on freeways and arterials was used 35
for this purpose. The model validation plot is given in Figure 4 b). 36
37
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 16
a) Network layout
b) Validation plot
FIGURE 4 Salt Lake City test network. 1 2
Three 3:00-6:00 PM models are analyzed and compared in the following three scenarios: 3
(i) the Base model, which represents regular traffic operations; (ii) the Work Zone (WZ) model, 4
where a work zone with a 50% reduction in capacity and a 45 mph speed limit is introduced on 5
the southbound (SB) segment S6 of I-15, between 3900 S and 4500 S streets; and (iii) the Work 6
Zone plus VMS (WZ + VMS) model, where a VMS with an estimated 15% driver response was 7
introduced on the I-15 SB link before the 3300 S freeway ramp. All models were run in the 8
integrated DTA-QEM environment for 50 iterations, to ensure the convergence or reaching 9
reasonable stability between the models. 10
11
5.1. Results 12 13
By comparing scenarios (i), (ii) and (iii), the work zone and VMS impacts were analyzed for the 14
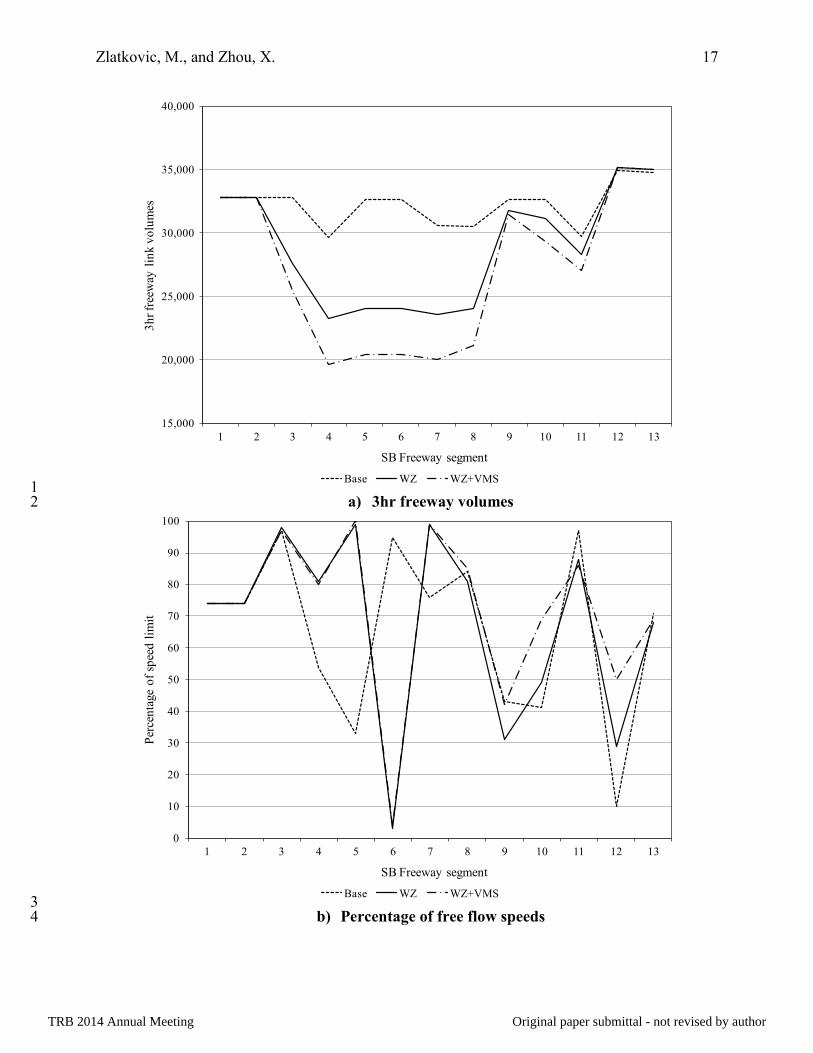
freeway and signalized intersections. Figure 5 a) and b) shows comparisons of freeway volumes 15
and speeds as a percentage of the free-flow speed, given for SB freeway segments. Figure 5 c) 16
shows a comparison of the average signalized intersection delays. 17
18
R² = 0.97
0
5,000
10,000
15,000
20,000
25,000
30,000
0 5,000 10,000 15,000 20,000 25,000 30,000
Sim
ula
ted
3h
r v
olu
mes
Observed 3hr volumes
TRB 2014 Annual Meeting Original paper submittal - not revised by author
Zlatkovic, M., and Zhou, X. 17
1 a) 3hr freeway volumes 2
3 b) Percentage of free flow speeds 4
15,000
20,000
25,000
30,000
35,000
40,000
1 2 3 4 5 6 7 8 9 10 11 12 13
3h
r fr
eew
ay l
ink
vo
lum
es
SB Freeway segment
Base WZ WZ+VMS
0
10
20
30
40
50
60
70
80
90
100
1 2 3 4 5 6 7 8 9 10 11 12 13
Per
cen
tage
of
spee
d l
imit
SB Freeway segment
Base WZ WZ+VMS
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 18
1 c) Average intersection delays 2
FIGURE 5 Work zone analysis results on freeway and intersection level. 3 4
The work zone impacts are present on both levels. In both WZ scenarios, the freeway 5
volumes changed along the whole stretch of the freeway. The reduced capacity and speed within 6
the work zone area cause time-dependent changes in traffic patterns reported by the DTA model. 7
The implementation of VMS further reduces the freeway volumes. The drop in freeway volumes 8
starts at segment 2, which is located at the 3300 S ramp, where vehicles exit the freeway in 9
search for alternate routes. The volumes are lower throughout the entire work zone, and they 10
start to increase after the ramp at 4500 S. Once passed the 5300 S ramp, the volumes in the WZ 11
scenarios return to regular levels, meaning that all the vehicles that used alternate routes returned 12
to the freeway. 13
The speeds in the base scenario drop significantly at segments 4 and 5, which are the 14
segments after the 3300 S on-ramp. In the WZ scenarios speeds at these segments are much 15
higher, because of the significantly lower volumes after the 3300 S ramp. However, the speeds 16
within the work zone affected area (within and around segment 6) drop significantly in both WZ 17
scenarios. The speeds in the WZ + VMS scenario are slightly higher in the segments following 18
the work zone. The speeds in the three scenarios converge to the same value after the 5300 S 19
ramp. These results can be used to assess the work zone impacts on freeway traffic. 20
The analysis of delays at signalized intersections through QEM shows the impacts that a 21
freeway work zone has on the adjacent arterial network. Signalized ramps experience the most 22
increase in delays, which is higher in both WZ scenarios. The increase in delays at intersections 23
just east and west of the freeway and along the adjacent arterials is still significant. On average, 24
with QEM optimization for the new volumes, the delays for the 40 intersections were increased 25
about 12% in the WZ scenario. Figure 5 c) also shows significantly higher delays at critical 26
0
20
40
60
80
100
120
140
160
180
200
220
44
04
44
12
44
13
44
14
44
15
44
17
44
23
44
27
44
29
44
31
44
34
44
42
44
45
46
08
46
11
46
14
46
16
46
18
47
25
47
26
47
27
47
31
47
33
47
50
48
06
48
13
48
17
48
22
48
24
48
26
48
28
49
23
49
24
49
26
49
32
49
36
53
34
54
56
57
62
57
84
Av
erag
e in
ters
ecti
on
del
ay p
er v
ehic
le (
s)
Intersection code number
Base WZ WZ+VMS Delay w/out QEM signal optimization
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 19
intersections without the QEM optimization, increasing from 30% to almost 500% when 1
compared to the Base scenario. The VMS implementation also has impacts on arterial 2
operations, and the delays are in this case just slightly higher than in the Base scenario. QEM 3
provides detailed information for all signalized intersections, allowing much better assessments 4
of their performance. 5
6
6. CONCLUSIONS 7
Coupling DTA and traffic signal control models is a complex problem, and it has been a focus of 8
numerous research efforts. This paper presents one solution to the problem, where a DTA model, 9
for example DTALite used in our system implementation, is tightly coupled with a QEM Excel-10
based signal timing estimation tool. The two models operate in a continuous feedback loop in 11
each consecutive iteration until the convergence threshold is achieved. In each iteration, the 12
mesoscopic DTA package passes the intersection geometry and current paths to QEM, which 13
performs signal timing estimation and determines movement capacities, and sends them back to 14
the DTA package for next iteration. This framework provides detailed output data on multiple 15
network levels. A simple network that demonstrates the operation of the feedback loop and the 16
convergence of the two models is first presented, and then the framework is tested on a real-17
world network with a work zone implementation. 18
The results presented in this paper show promising results in coupling DTA and signal 19
control through the designed framework. The current application becomes stable after about 30 20
iterations, when the network parameters converge, with minimal changes in consecutive 21
iterations. The results from a real-world work zone example show that this application can 22
successfully be used to assess impacts of any events that disrupt normal traffic operations and 23
cause route switching on multiple levels, including signalized intersections. Future research 24
efforts will be focused on improving the current models, as well as developing a user-friendly 25
web-based GUI for easier data inputs and visualizations. 26
27
ACKNOWLEDGEMENT 28
The second author of this paper is partially supported through a FHWA research project titled 29
“Effective Integration of Analysis Modeling and Simulation Tools”. Special thanks to our 30
colleagues Brandon Nevers and other engineers at Kittelson & Associates, Inc. for their 31
constructive comments. The authors express their gratitude to the Mountain Plains Consortium 32
University Transportation Center that provided funds and assistance for this study. The work 33
presented in this paper remains the sole responsibility of the authors. 34
35
REFERENCES 36
1. Mahmassani, H. S. Dynamic Network Traffic Assignment and Simulation Methodology for 37
Advanced System Management Applications. In Networks and Spatial Economics, Vol. 12, 38
2001, pp. 267-292. 39
2. Abdelfatah, A. S. and H. S. Mahmassani. System Optimal Time-Dependent Path 40
Assignment and Signal Timing in Traffic Network. In Transportation Research Record: 41
Journal of the Transportation Research Board, No. 1645, Transportation Research Board 42
of the National Academics, Washington, D.C., 1998, pp. 185-193. 43
TRB 2014 Annual Meeting Original paper submittal - not revised by author

Zlatkovic, M., and Zhou, X. 20
3. Sun, D., R. F. Benekohal, and S. T. Waller. Bi-level Programming Formulation and 1
Heuristic Solution Approach for Dynamic Traffic Signal Optimization. In Computer-Aided 2
Civil and Infrastructure Engineering No. 21, 2006, pp. 321-333. 3
4. Goodchild, M.F. Geographical Information Science. In International Journal of 4
Geographical Information Systems No. 6, 1992, pp. 31-45. 5
5. Nyerges, T.L. Coupling GIS and Spatial Analytical Models. In Proceedings of the 5th
6
International Symposium on Spatial Data Handling, Vol. 2, 1992, pp. 534-543. 7
6. Smith, M. J., and M. O. Ghali. The Dynamics of Traffic Assignment and Traffic Control: A 8
Theoretical Study. In Transportation Research No. 24B, 1990, pp. 409–422. 9
7. Smith, M. J., and M. O. Ghali. Dynamic Traffic Assignment and Dynamic Traffic Control. 10
Presented at 11th
International Symposium on Traffic and Transportation Theory. 11
Yokohama, Japan, 1990. 12
8. Gartner, N. H., and C Stamatiadis. Integration of Dynamic Assignment with Real-Time 13
Traffic Adaptive Control. In Transportation Research Record: Journal of the 14
Transportation Research Board, No. 1644, Transportation Research Board of the National 15
Academics, Washington, D.C., 1997, pp. 150–56. 16
9. Chen, O., and M. E. Ben-Akiva. Game-theoretic formulations of the interactions between 17
dynamic traffic control and dynamic traffic assignment. In Transportation Research 18
Record: Journal of the Transportation Research Board, No. 1617, Transportation Research 19
Board of the National Academics, Washington, D.C., 1998, pp. 179-188. 20
10. Ukkusuri, S., K. Doan., and H. M. Abdul Aziz. A Bi-level Formulation for the Combined 21
Dynamic Equilibrium based Traffic Signal Control. In Procedia - Social and Behavioral 22
Sciences No. 80, 2013, pp. 729-752. 23
11. Highway Capacity Manual 2010, Transportation Research Board of the National 24
Academies, Washington, D.C., 2010. 25
12. Koonce, P., et al. Traffic Signal Timing Manual. Publication FHWA- HOP-08-024. 26
FHWA, U.S. Department of Transportation, 2008. 27
13. Utah Department of Transportation. Signalized Intersection Design Guidelines. UDOT, 28
2012. 29
14. Lu C, Zhou, X and Zhang K. Dynamic Origin-Destination Demand Flow Estimation under 30
Congested Traffic Conditions. In Transportation Research Part C. Volume 34, 2013, pp. 31
16–37 32
TRB 2014 Annual Meeting Original paper submittal - not revised by author