eciv 720 a advanced structural mechanics and analysis lecture 10: solution of continuous systems –...
Post on 21-Dec-2015
226 views
TRANSCRIPT

ECIV 720 A Advanced Structural
Mechanics and Analysis
Lecture 10: Solution of Continuous Systems –
Fundamental Concepts
• Mixed Formulations• Intrinsic Coordinate Systems
Last TimeWeighted Residual Formulations
Consider a general representation of a governing equation on a region V
PLu L is a differential operator
0
dx
duEA
dx
deg. For Axial element
dx
dEA
dx
dL
Last TimeWeighted Residual Formulations
Exact Approximate
PuL ~ ERROR
Objective:
Define so that weighted average of Error vanishesu~
NOT THE ERROR ITSELF !!
Last TimeWeighted Residual Formulations
Set Error relative to a weighting function
0~ V
dVPuL
Objective:
Define so that weighted average of Error vanishesu~
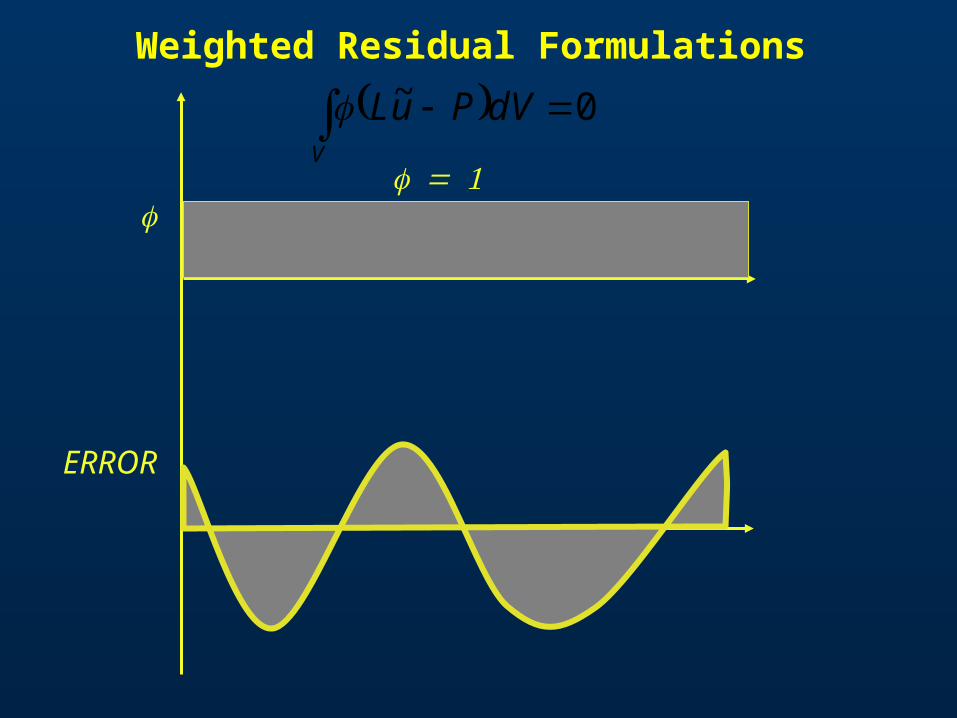
Weighted Residual Formulations
ERROR
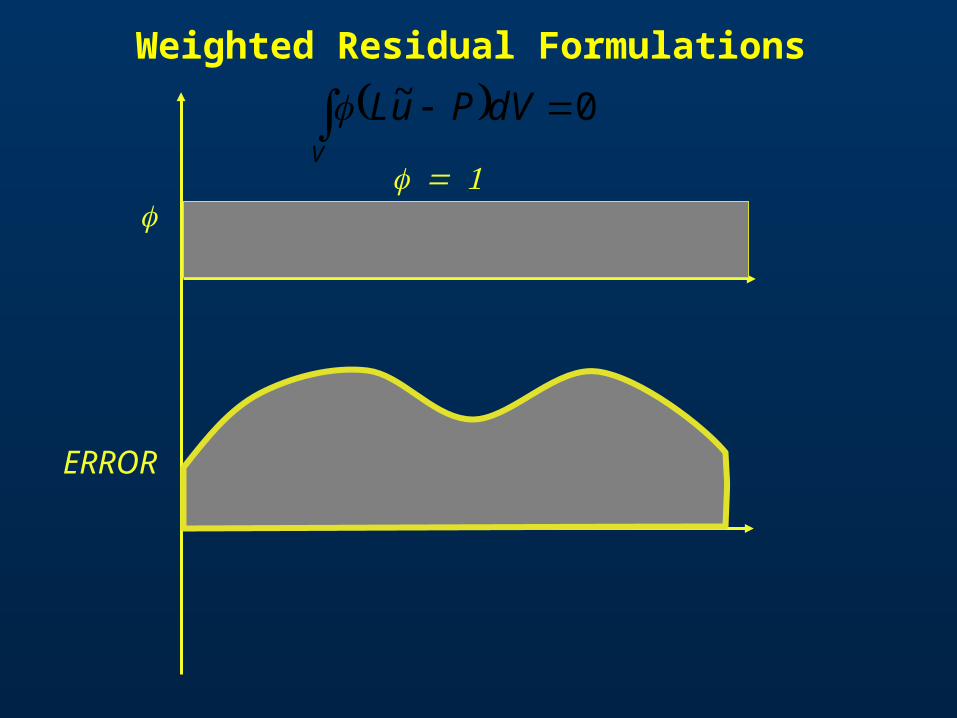
0~ V
dVPuL
Weighted Residual Formulations
ERROR
0~ V
dVPuL
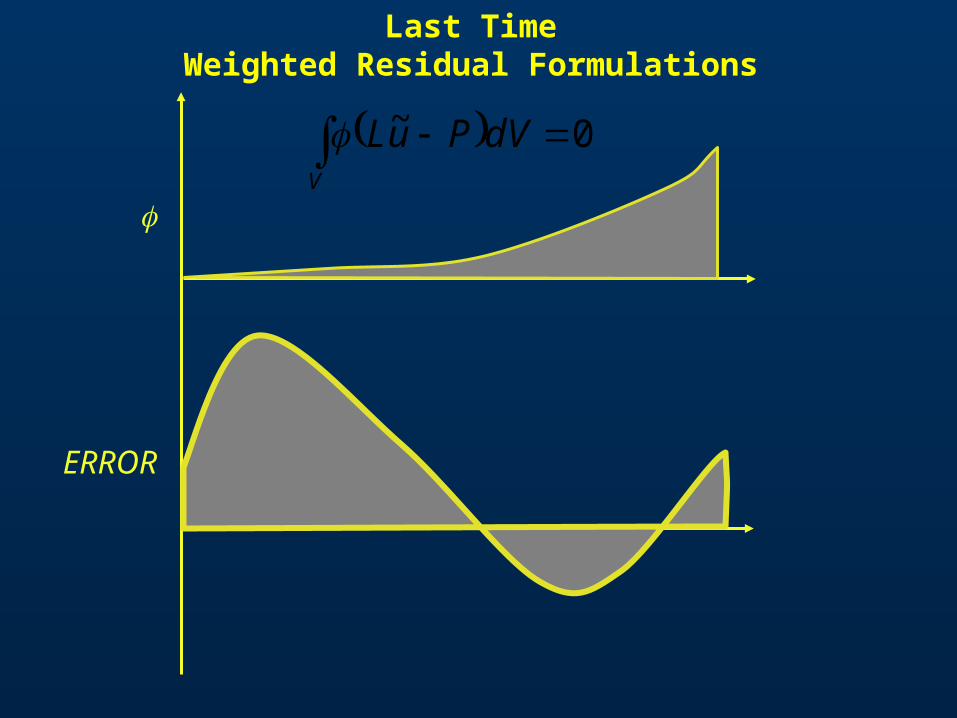
Last TimeWeighted Residual Formulations
ERROR
0~ V
dVPuL
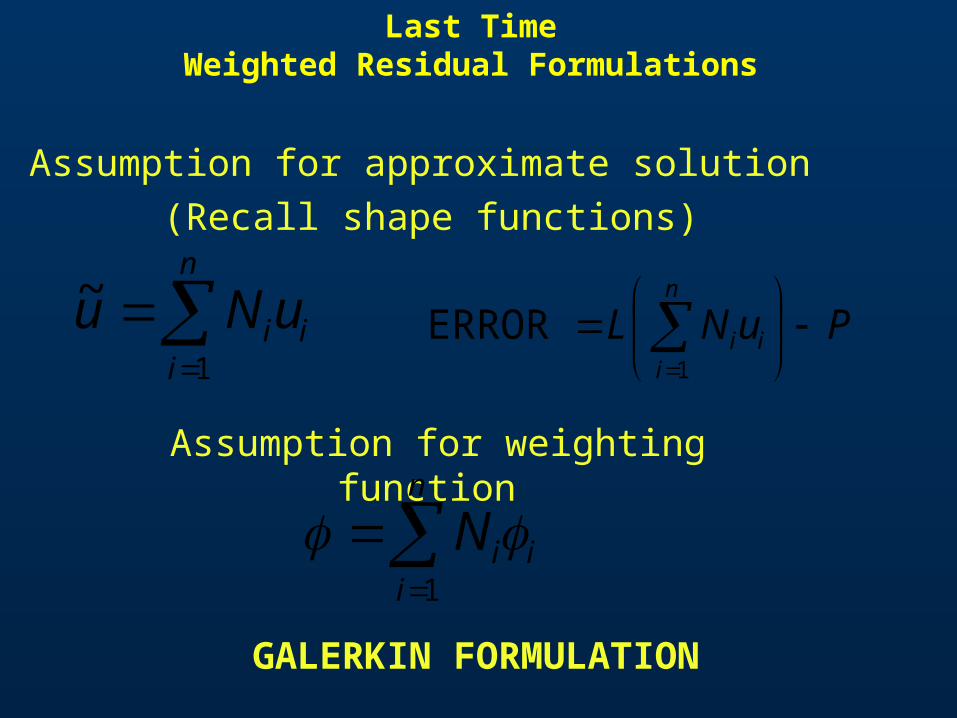
Last TimeWeighted Residual Formulations
Assumption for approximate solution
(Recall shape functions)
n
iiiuNu
1
~PuNL
n
iii
1
ERROR
Assumption for weighting function
n
iiiN
1
GALERKIN FORMULATION
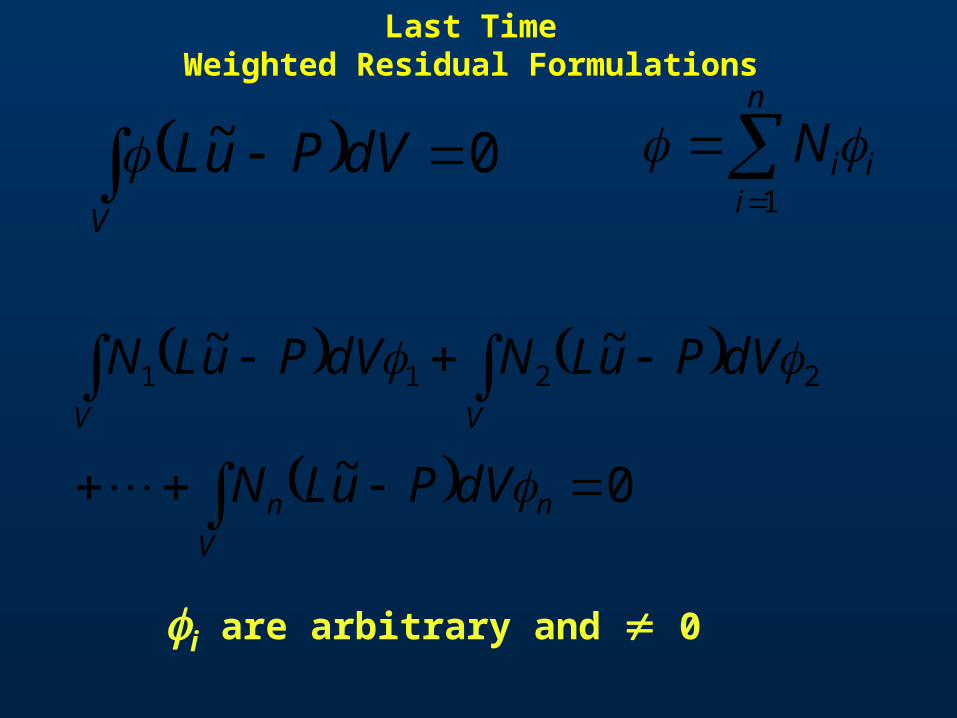
Last TimeWeighted Residual Formulations
0~
~~2211
n
V
n
VV
dVPuLN
dVPuLNdVPuLN
0~ V
dVPuL
n
iiiN
1
i are arbitrary and 0
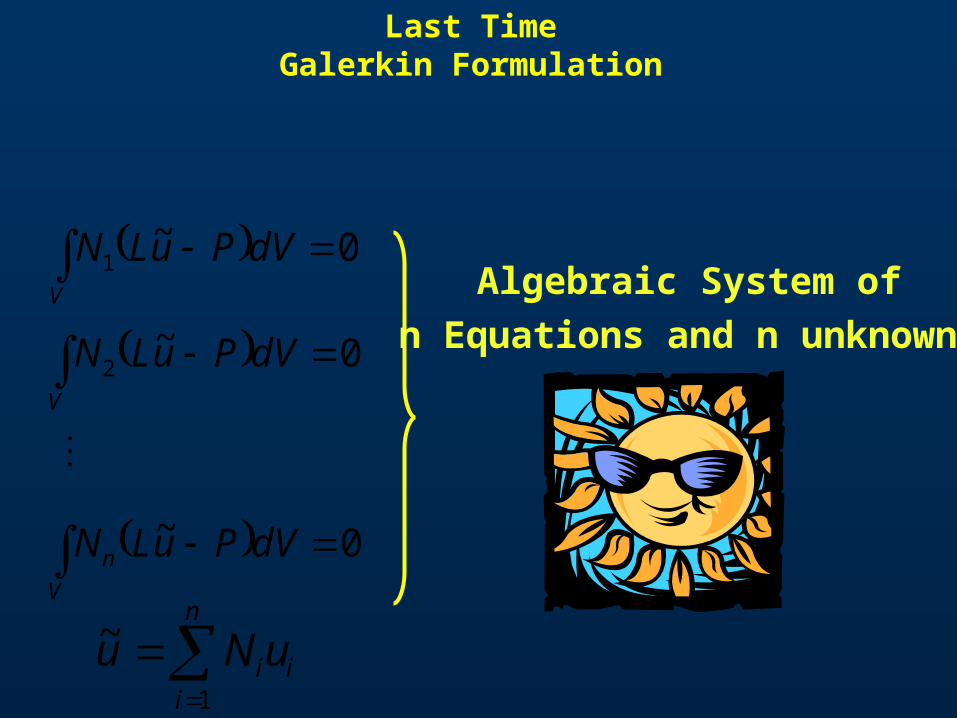
Last TimeGalerkin Formulation
Algebraic System of
n Equations and n unknowns
0~
1 V
dVPuLN
0~2
V
dVPuLN
0~ V
n dVPuLN
n
iiiuNu
1
~
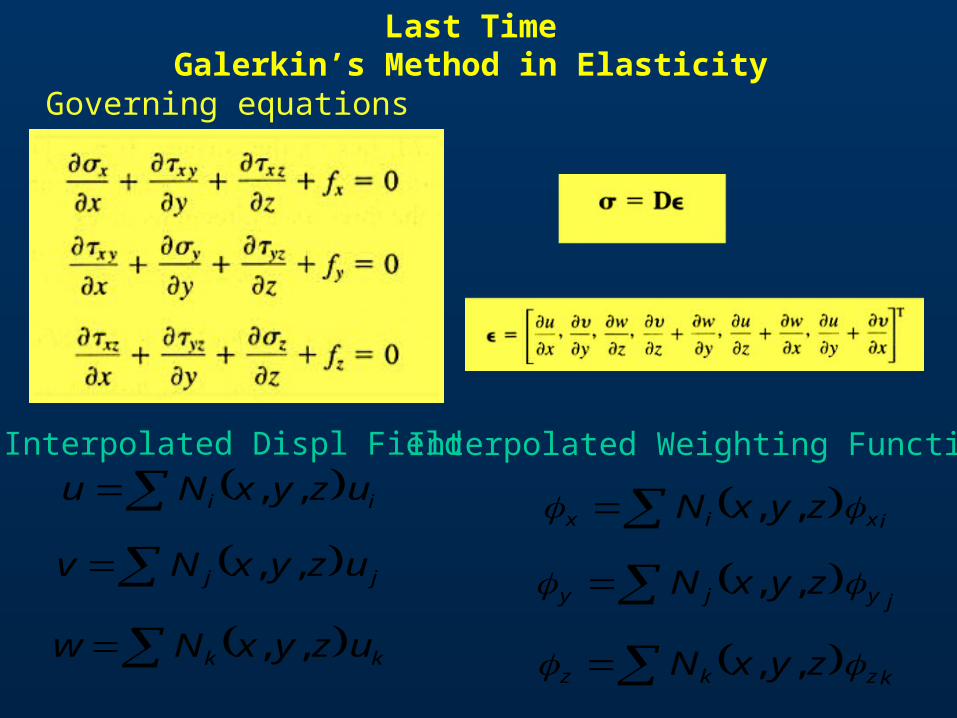
Last TimeGalerkin’s Method in Elasticity
Governing equations
Interpolated Displ Field
ii uzyxNu ,,
jj uzyxNv ,,
kk uzyxNw ,,
Interpolated Weighting Function
ixix zyxN ,,
jyjy zyxN ,,
kzkz zyxN ,,
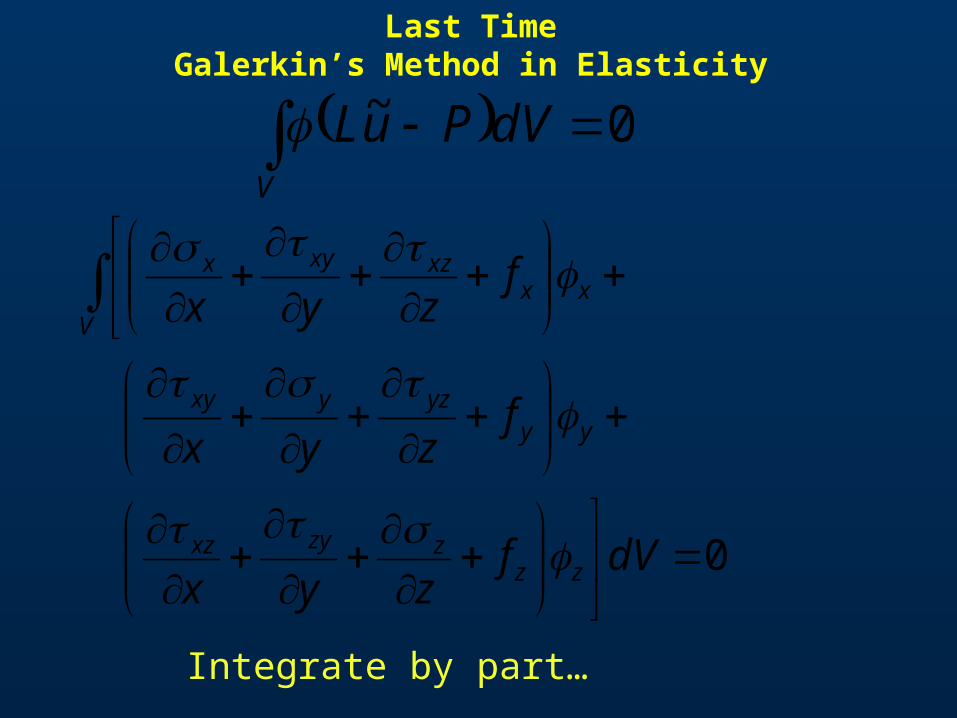
Last TimeGalerkin’s Method in Elasticity
0
dVfzyx
fzyx
fzyx
zzzzyxz
yyyzyxy
V
xxxzxyx
Integrate by part…
0~ V
dVPuL
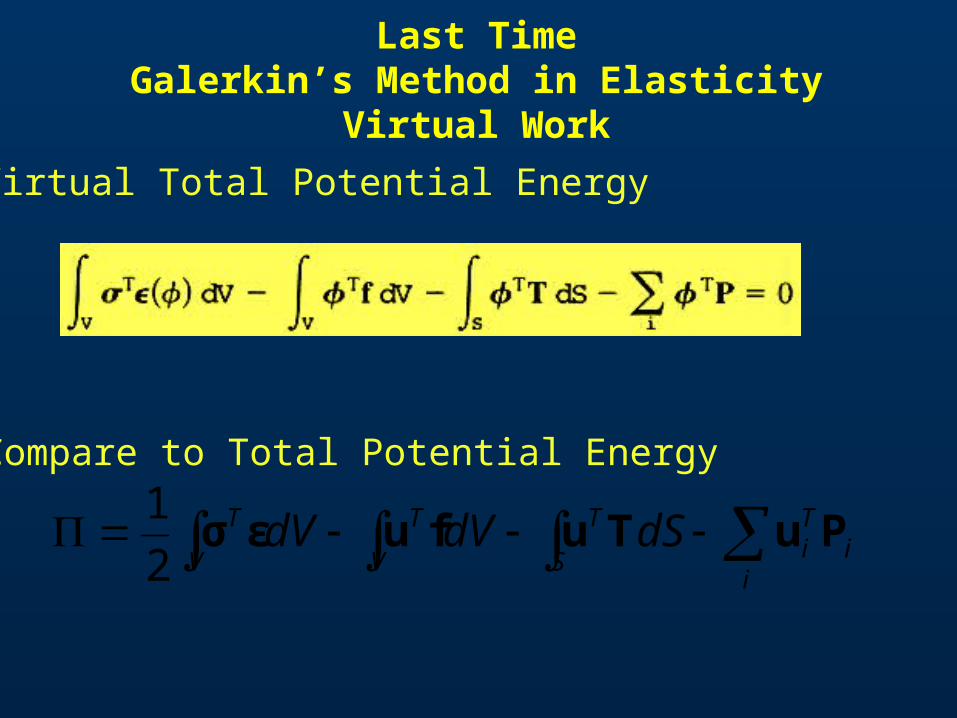
Last TimeGalerkin’s Method in Elasticity Virtual
Work
i
iTiS
T
V
T
V
T dSdVdV PuTufuεσ2
1
Compare to Total Potential Energy
Virtual Total Potential Energy
Last TimeGalerkin’s Formulation
•More general method
•Operated directly on Governing Equation
•Variational Form can be applied to other governing equations
•Preffered to Rayleigh-Ritz method especially when function to be minimized is not available.
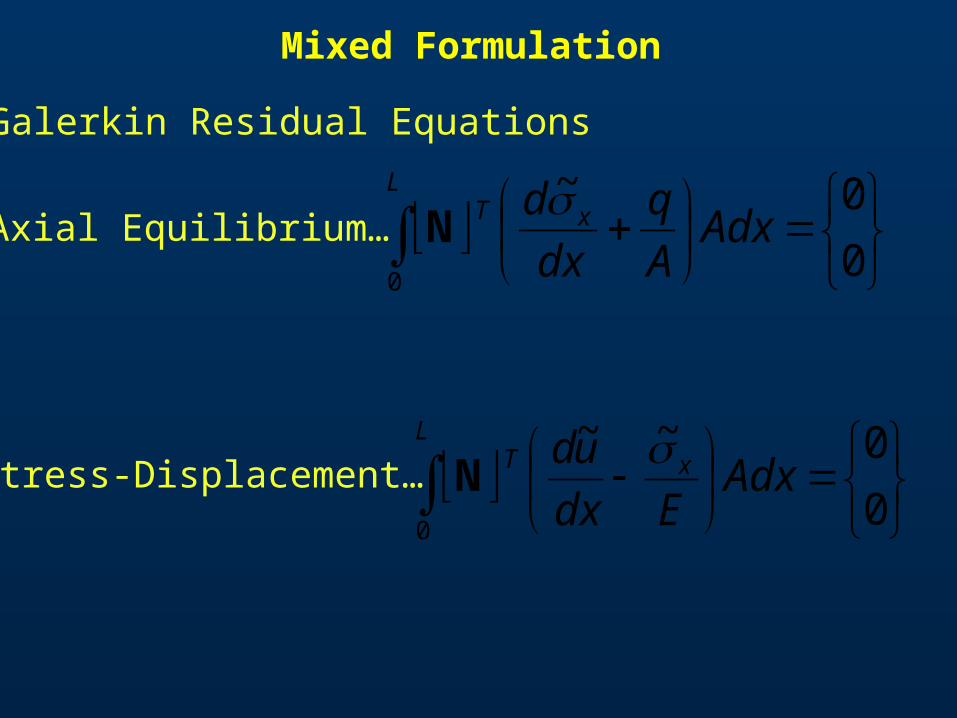
Mixed Formulation
• Displacement Based FE approximations– Combine subsidiary equations to obtain G.E.– G.E. in terms of displacements– Stresses, Strains etc enter as natural B.C.
• Mixed Formulation– Apply Galerkin directly on subsidiary relations– Nodal dof contain displacements AND other field
quantities
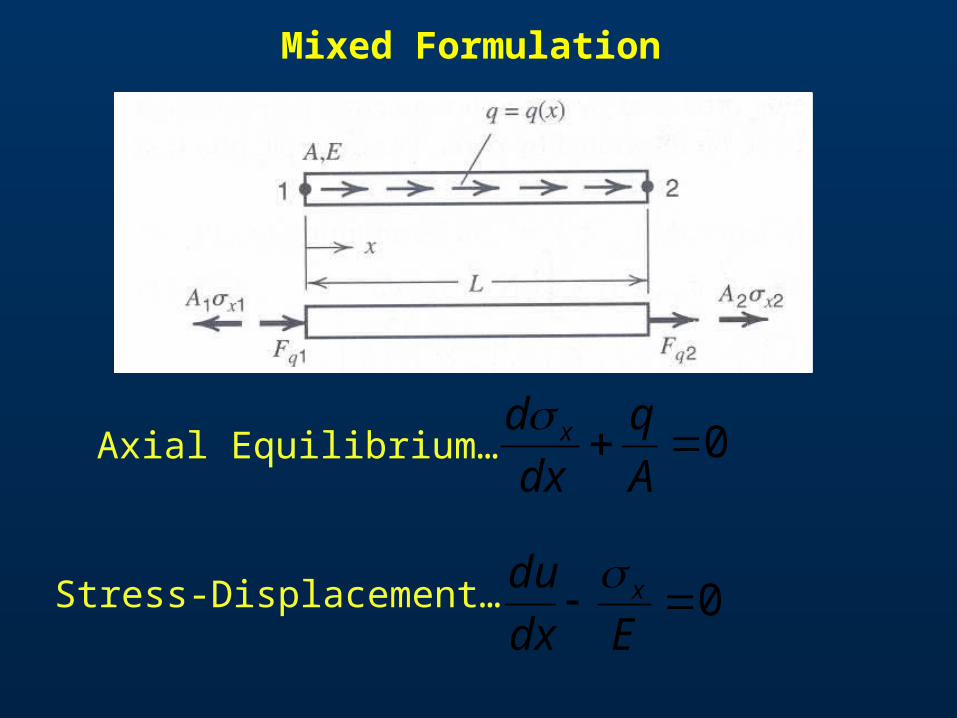
Mixed Formulation
0A
q
dx
d xAxial Equilibrium…
0Edx
du xStress-Displacement…
Mixed Formulation
2
1~
Nx
2
1~u
uu N
L
x
L
xLN
Mixed Formulation
Galerkin Residual Equations
0
0~
0
LxT Adx
A
q
dx
dNAxial Equilibrium…
0
0~~
0
LxT Adx
Edx
ud NStress-Displacement…
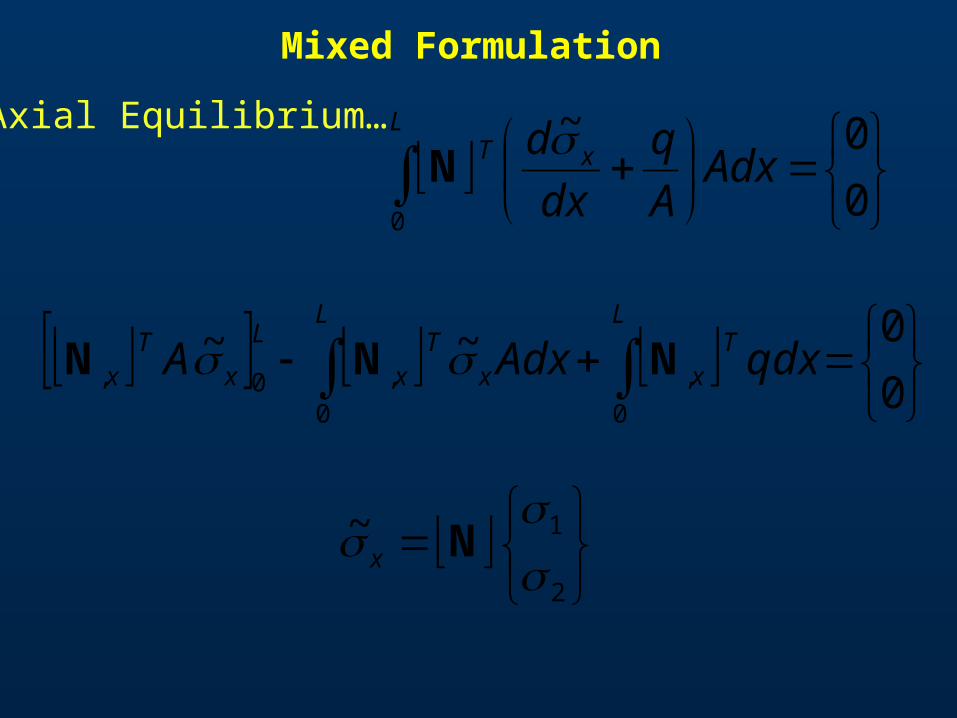
Mixed Formulation
0
0~
0
LxT Adx
A
q
dx
dN
Axial Equilibrium…
0
0~~
0
,
0
,0,
LT
x
L
xT
x
L
xT
x qdxAdxA NNN
2
1~
Nx
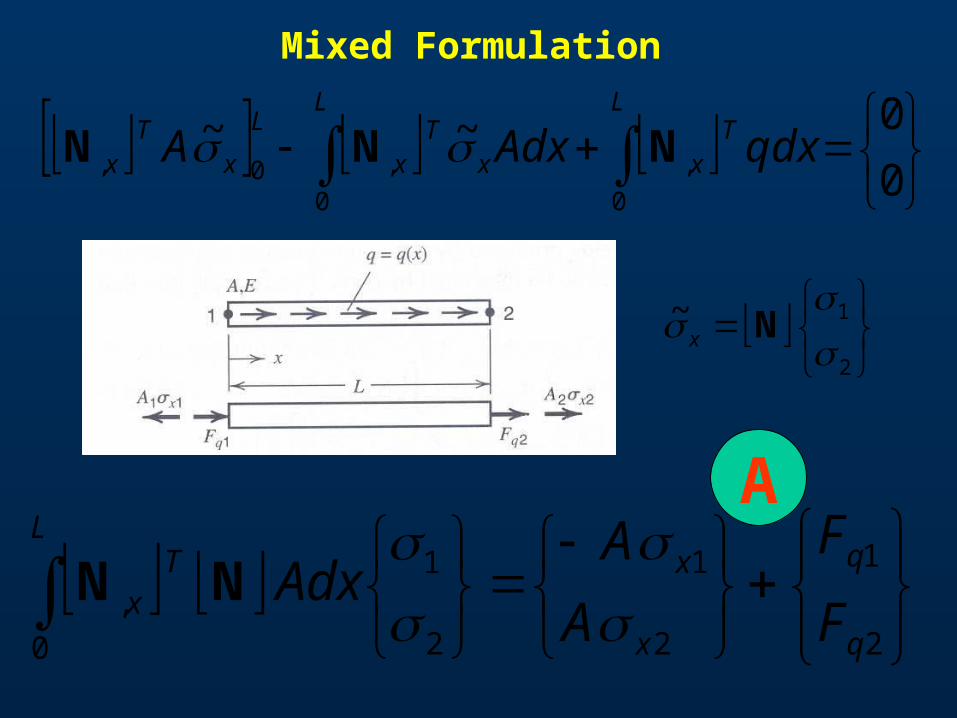
Mixed Formulation
2
1
2
1
2
1
0
,q
q
x
xL
Tx F
F
A
AAdx
NN
0
0~~
0
,
0
,0,
LT
x
L
xT
x
L
xT
x qdxAdxA NNN
2
1~
Nx
A
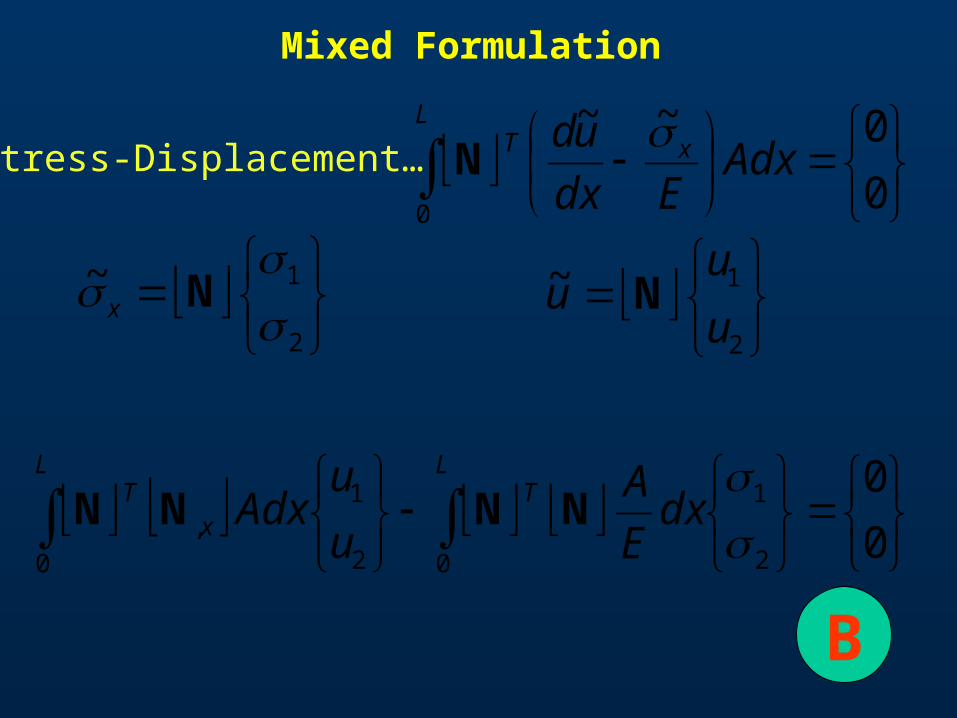
Mixed Formulation
0
0~~
0
LxT Adx
Edx
ud NStress-Displacement…
2
1~
Nx
2
1~u
uu N
0
0
2
1
02
1
0
, L
TL
xT dx
E
A
u
uAdx NNNN
B
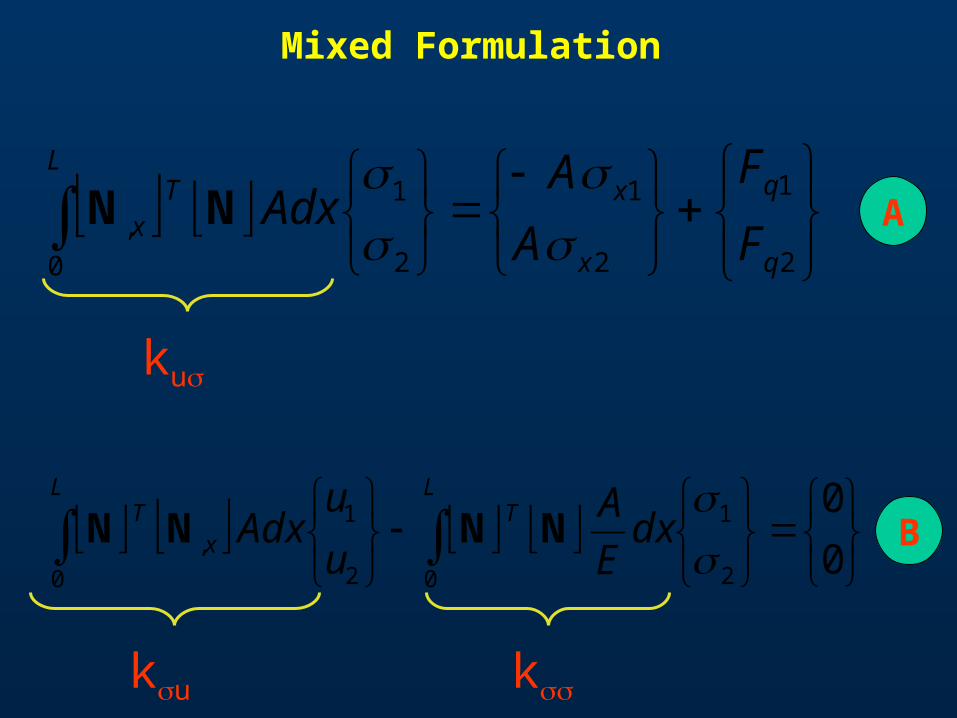
Mixed Formulation
2
1
2
1
2
1
0
,q
q
x
xL
Tx F
F
A
AAdx
NN
0
0
2
1
02
1
0
, L
TL
xT dx
E
A
u
uAdx NNNN
ku
ku k
A
B
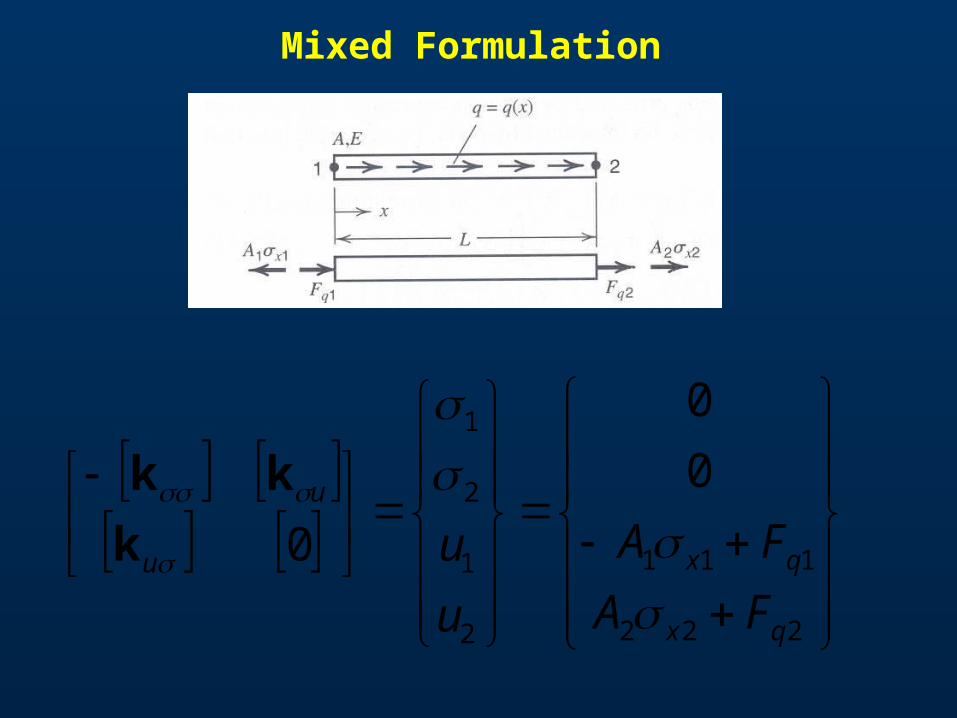
Mixed Formulation
222
111
2
1
2
1
0
0
0
qx
qxu
u
FA
FA
u
u
k
kk
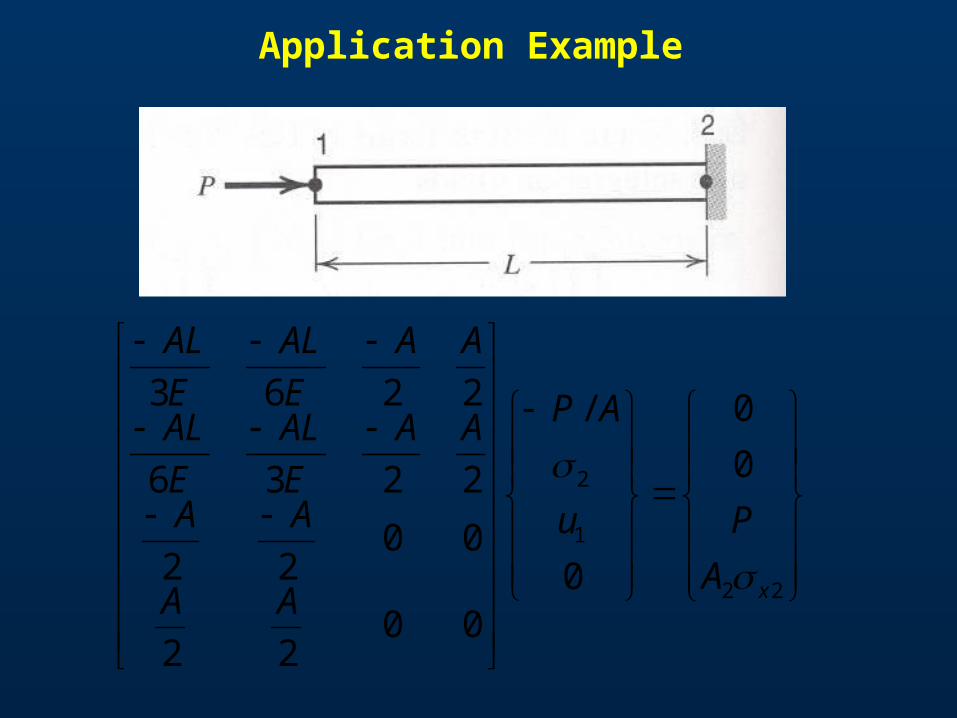
Application Example
22
1
2 0
0
0
/
0022
0022
2236
2263
xA
Pu
AP
AA
AA
AA
E
AL
E
AL
AA
E
AL
E
AL
INTRINSIC COORDINATE SYSTEMS
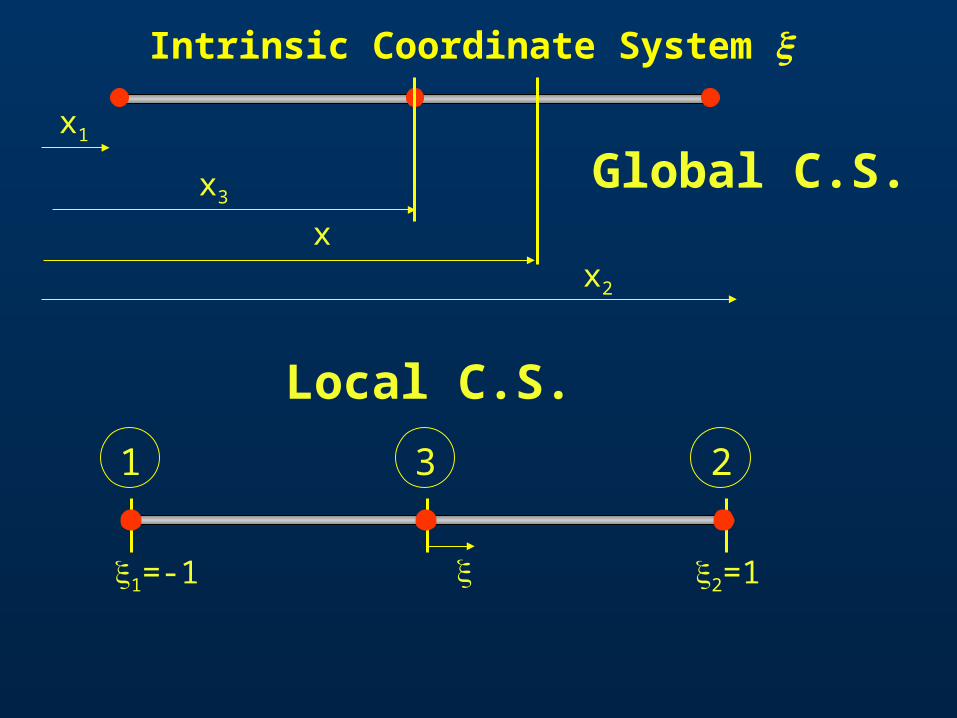
Intrinsic Coordinate System
x1
xx2
x3
1=-1
1
3
2=1
2
Global C.S.
Local C.S.
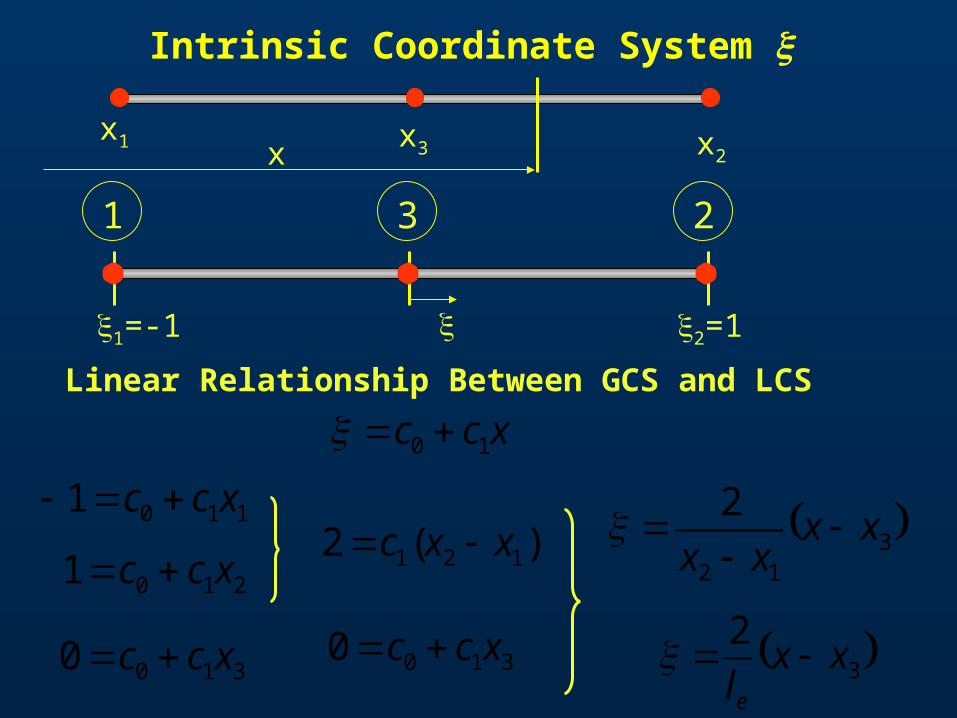
Intrinsic Coordinate System
x1 x x2x3
1=-1
1
3
2=1
2
312
2xx
xx
Linear Relationship Between GCS and LCS
xcc 10
1101 xcc
2101 xcc
3100 xcc
)(2 121 xxc
3100 xcc 3
2xx
le
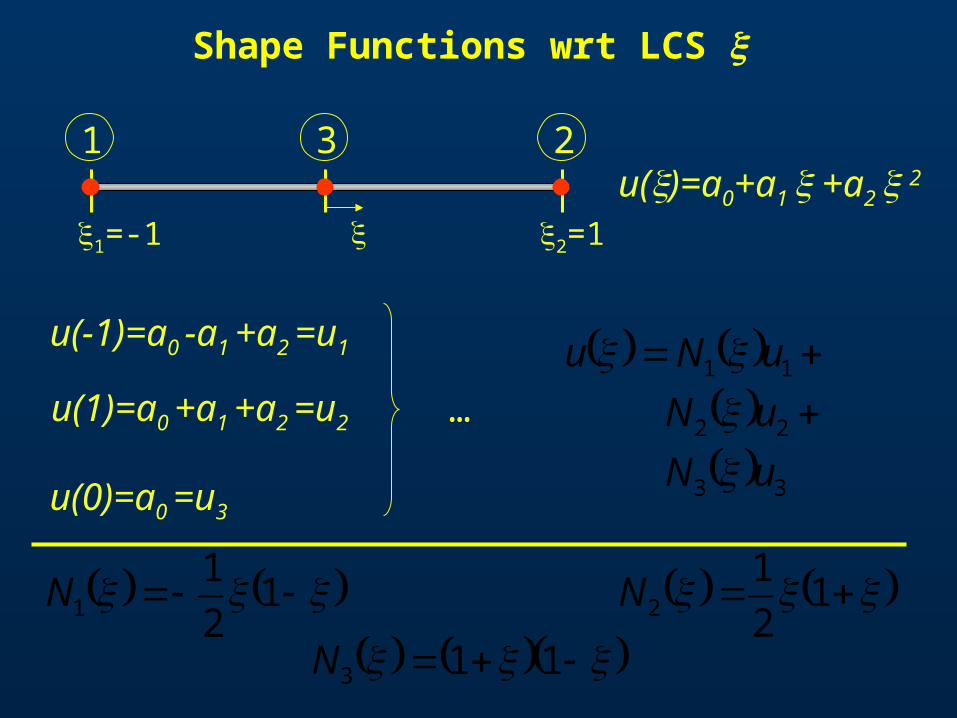
Shape Functions wrt LCS
113N
12
11N 1
2
12N
u(-1)=a0 -a1 +a2 =u1
u(1)=a0 +a1 +a2 =u2
u(0)=a0 =u3
33
22
11
uN
uN
uNu
…
u()=a0+a1 +a2 2
1=-1
1
2=1
3 2
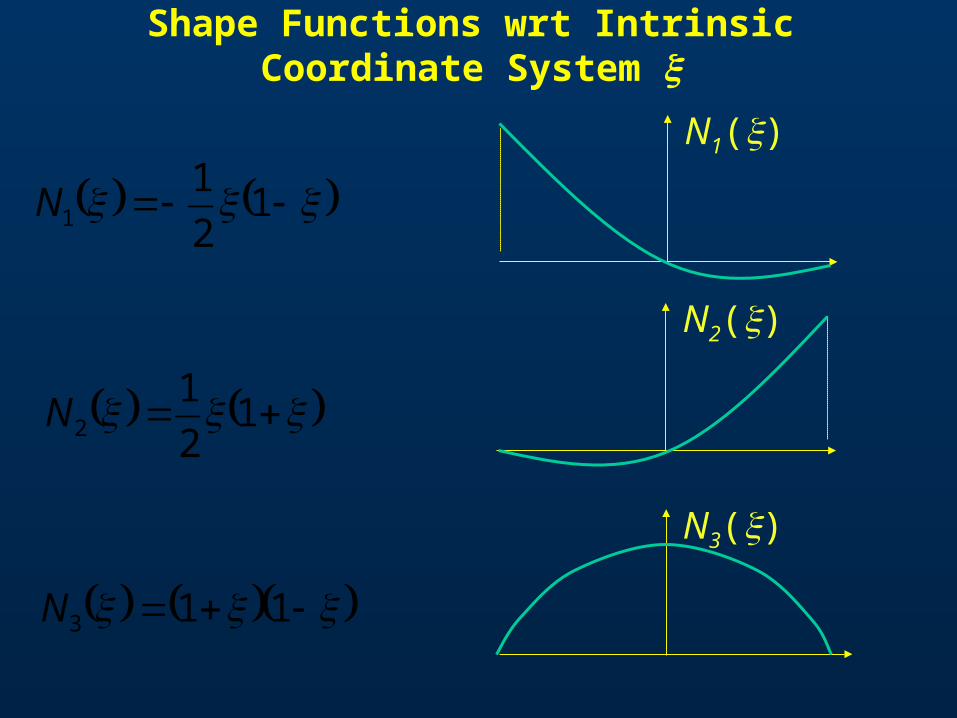
Shape Functions wrt Intrinsic Coordinate System
12
11N
N1()
12
12N
N2()
113N
N3()

wrt
dx
d
d
du
dx
xdu )()(
1
12
22
Jlxxdx
d
e
321 22
21
2
21uuu
d
du
12
11N 1
2
12N 113N
332211 uNuNuNu

Element Strain-Displacement Matrix
321 421211
uuule
3
2
1
421211
u
uu
le
Cast in Matrix Form
e= B ue
e= E B ue
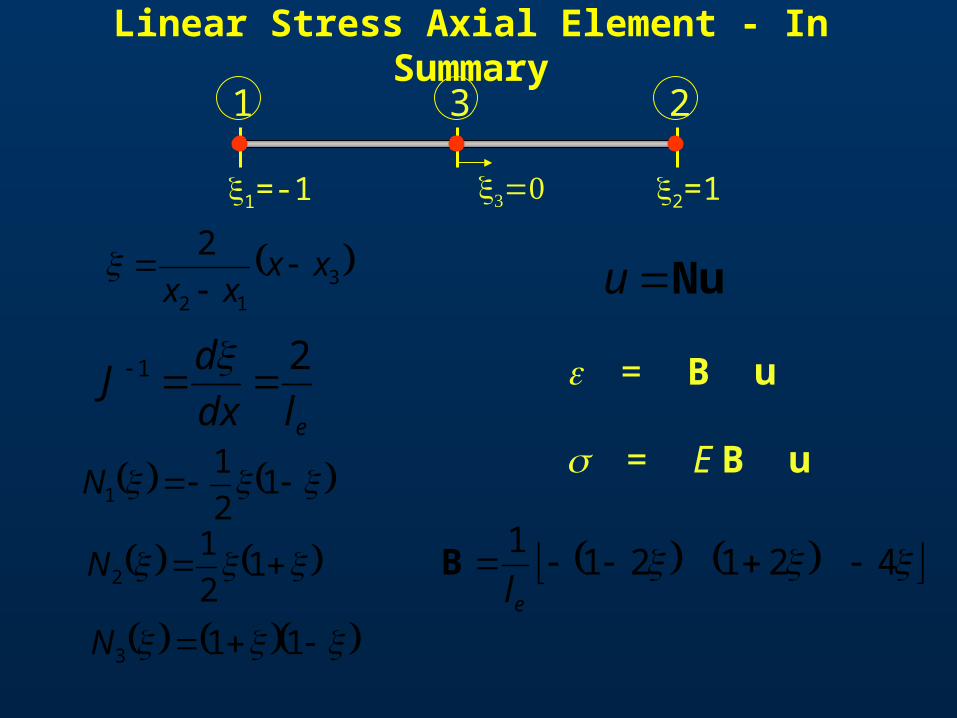
Linear Stress Axial Element - In Summary
312
2xx
xx
= B u
= E B u
Nuu
eldx
dJ
21
12
11N
12
12N
113N
421211
el
B
1=-1
1
2=1
3 2
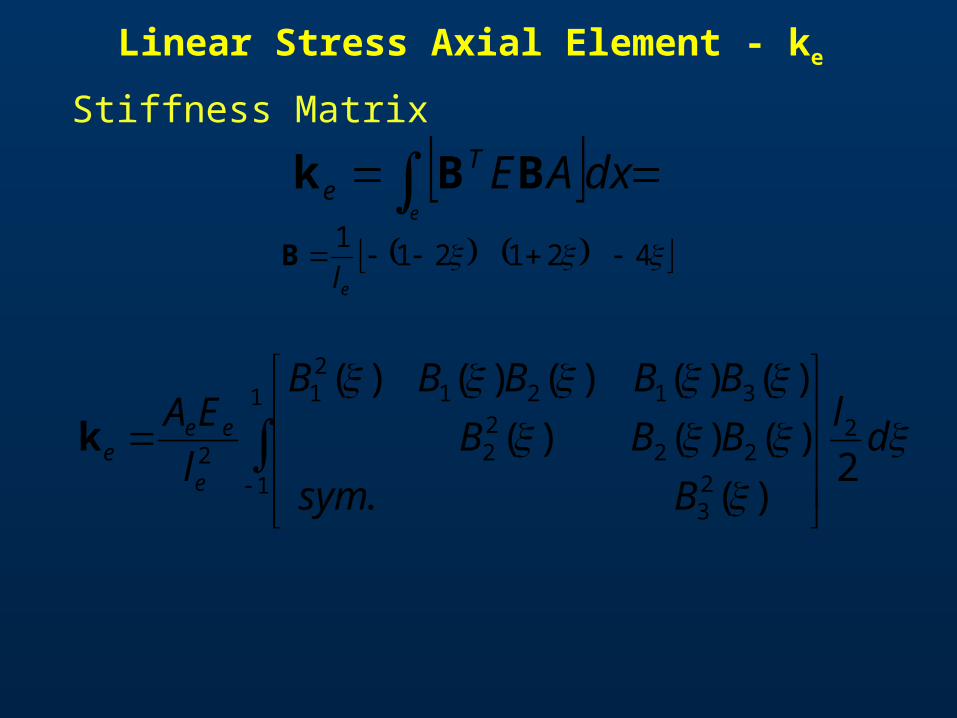
Linear Stress Axial Element - ke
1
1
2
23
2222
312121
2 2)(.
)()()(
)()()()()(
dl
Bsym
BBB
BBBBB
l
EA
e
eeek
421211
el
B
el
Te dxAEBBk
Stiffness Matrix
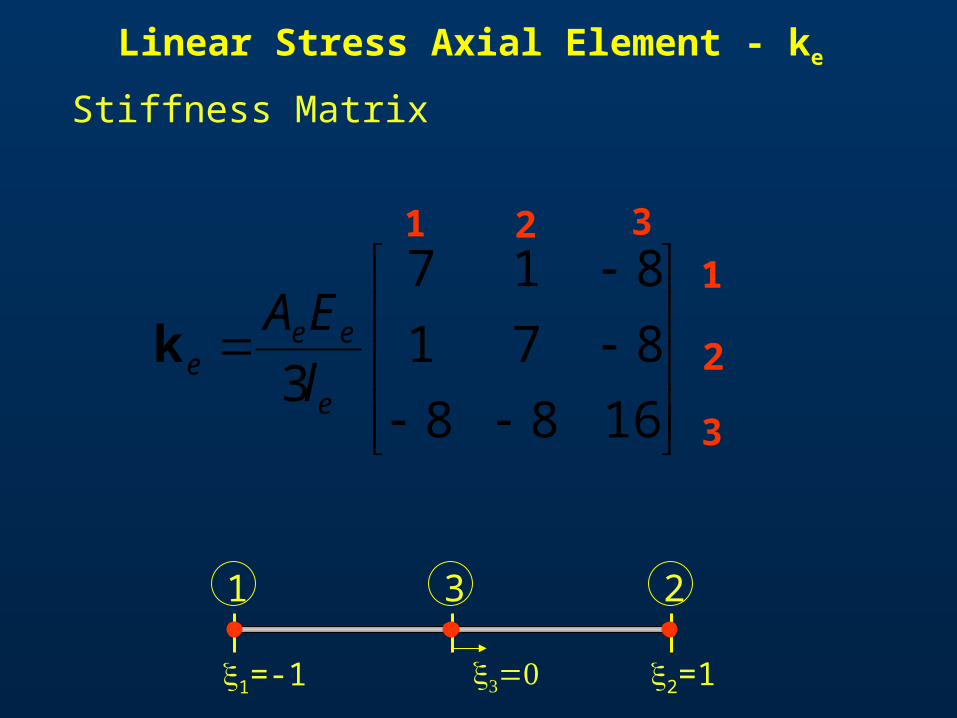
Linear Stress Axial Element - ke
1688
871
817
3 e
eee l
EAk
Stiffness Matrix
1=-1
1
2=1
3 2
1
2
3
1 2 3
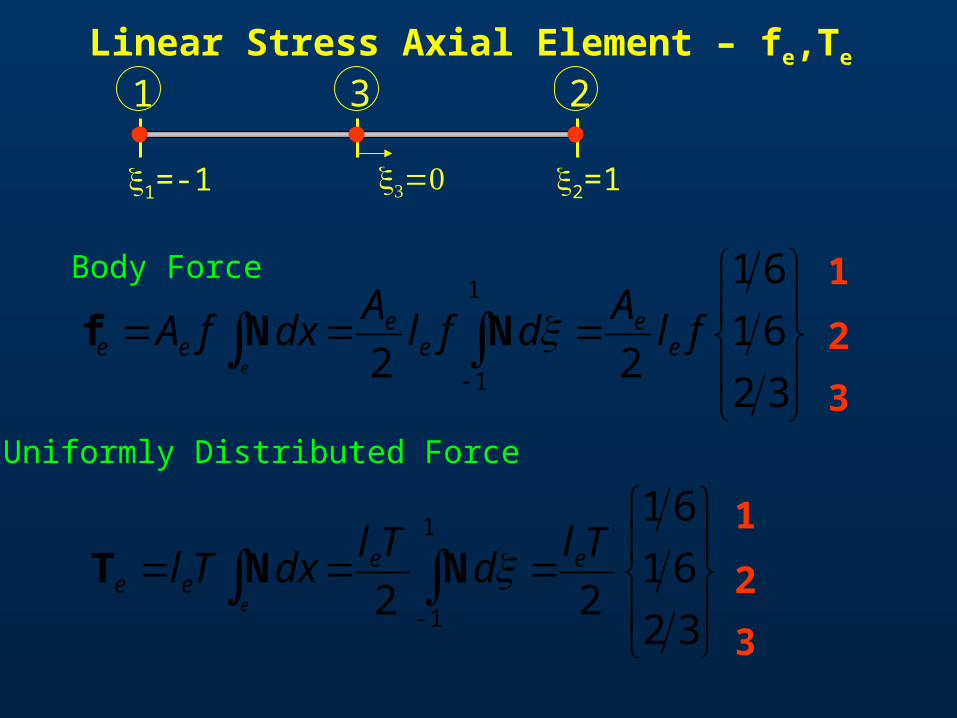
Linear Stress Axial Element – fe,Te
32
61
61
22
1
1
flA
dflA
dxfA ee
ee
leee
NNf
32
61
61
22
1
1
Tld
TldxTl ee
leee
NNT
1
2
3
1
2
3
1=-1
1
2=1
3 2
Body Force
Uniformly Distributed Force