模块型角度编码器 - heidenhain...适用于较高轴速或需要较大安装公差的应...
TRANSCRIPT

09/2018
模块型角度编码器磁电扫描

2
海德汉公司的ERM系列模块化编码器由一个磁栅鼓和一个磁阻传感器扫描单元组成。它的MAGNODUR测量基准和磁电扫描原理使该编码器对污染特别不敏感。
典型应用包括大直径空心轴的机床和设备,这种应用环境中存在大量气化颗粒或气化液体,例如车床或铣床的主轴,精度要求相对不太严格。
以下信息 • 无内置轴承角度编码器 • 内置轴承角度编码器 • 旋转编码器 • 伺服驱动编码器 • 直线光栅尺用于NC数控机床 • 敞开式直线光栅尺 • 海德汉接口电子电路 • 海德汉数控系统
欢迎索取,或访问 www.heidenhain.com.cn。
有关所有可用接口的全面说明和一般电气信息,参见海德汉编码器接口样本, ID 1078628-xx。
本样本是以前样本的替代版,所有以前版本均不再有效。订购海德汉公司的产品仅以订购时有效的综合样本版本为准。
产品遵循的标准(EN、ISO等), 请见样本中的标注。

目录
概要
海德汉角度编码器 4
选型指南 磁电扫描的模块型角度编码器 6
光学扫描的模块型角度编码器 8
绝对式封闭角度编码器 10
增量式封闭角度编码器 12
技术特性和安装信息
应用领域 14
特点 16
测量原理 测量基准 17
磁电扫描 17
增量测量法 18
测量精度 19
机械结构类型和装配 21
一般机械信息 23
机械连接的防松机构 24
技术参数 系列 信号周期
读数头 AK ERM 2200 ≈ 200 µm 26
AK ERM 2400 ≈ 400 µm 26
AK ERM 2900 ≈ 1000 µm 26
栅鼓 TTR ERM 2200 ≈ 200 µm 28
TTR ERM 2400 ≈ 400 µm 28
TTR ERM 2404/2904 ≈ 400 µm / ≈ 1000 µm 30
TTR ERM 2405 ≈ 400 µm 31
尺寸 32
电气连接
增量信号 » 1 VPP 36
« TTL 37
位置值 EnDat 38
电缆和连接件 一般信息 39
连接电缆 40
连接件 44
诊断和测试设备 45
接口电子电路 48
4
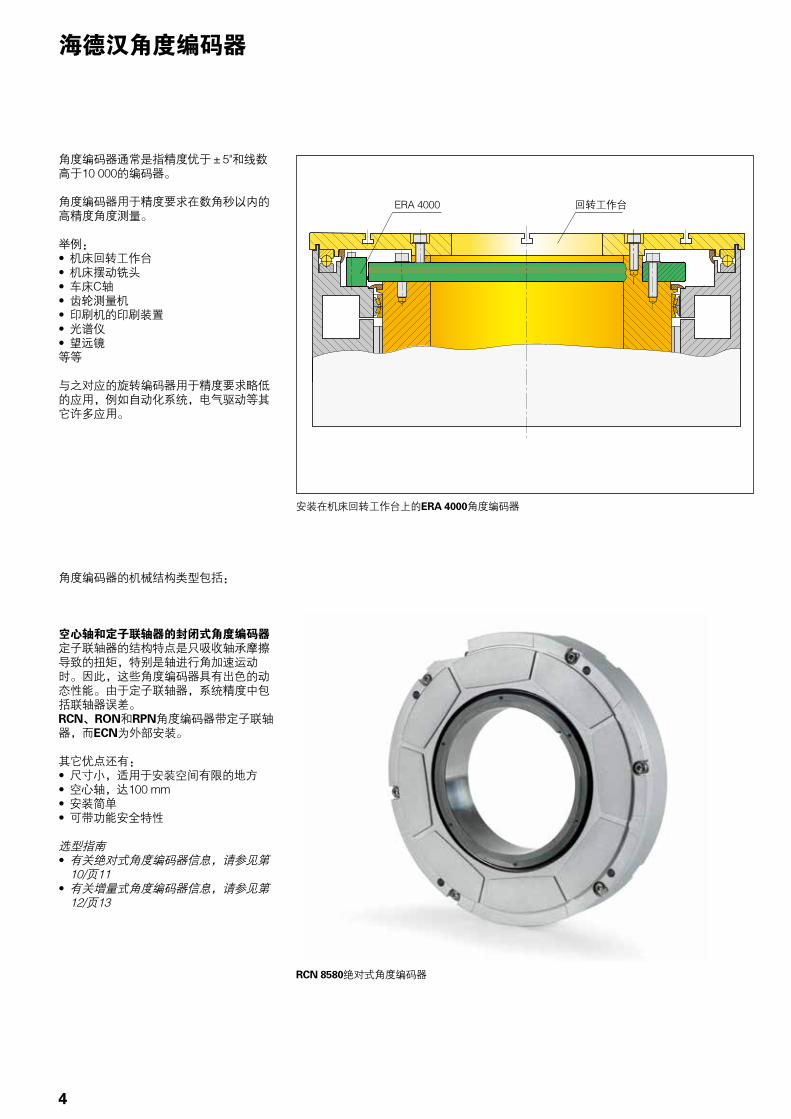
ERA 4000
安装在机床回转工作台上的ERA 4000角度编码器
回转工作台
海德汉角度编码器
角度编码器通常是指精度优于±5"和线数高于10 000的编码器。
角度编码器用于精度要求在数角秒以内的高精度角度测量。
举例: • 机床回转工作台 • 机床摆动铣头 • 车床C轴 • 齿轮测量机 • 印刷机的印刷装置 • 光谱仪 • 望远镜
等等
与之对应的旋转编码器用于精度要求略低的应用,例如自动化系统,电气驱动等其它许多应用。
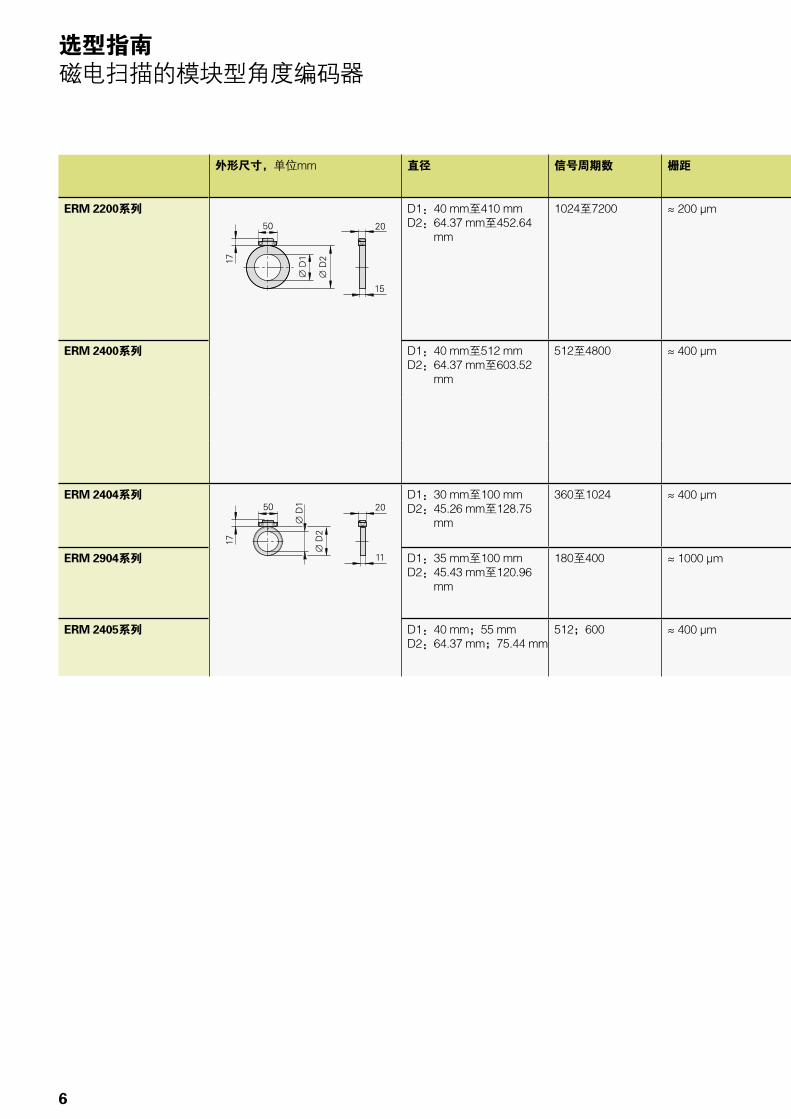
RCN 8580绝对式角度编码器
空心轴和定子联轴器的封闭式角度编码器定子联轴器的结构特点是只吸收轴承摩擦导致的扭矩,特别是轴进行角加速运动时。因此,这些角度编码器具有出色的动态性能。由于定子联轴器,系统精度中包括联轴器误差。RCN、RON和RPN角度编码器带定子联轴器,而ECN为外部安装。
其它优点还有: • 尺寸小,适用于安装空间有限的地方 • 空心轴,达100 mm • 安装简单 • 可带功能安全特性
选型指南 • 有关绝对式角度编码器信息,请参见第10/页11
• 有关增量式角度编码器信息,请参见第12/页13
角度编码器的机械结构类型包括:

5
分离式联轴器的封闭式角度编码器实心轴的ROD和ROC系列角度编码器特别适用于较高轴速或需要较大安装公差的应用。联轴器最大允许的轴向公差达±1 mm。
有关选型指南信息,请参见第12/页13
光学扫描的模块型角度编码器无内置轴承角度编码器,例如ERP、ERO和ERA,特别适用于安装空间有限的高精度应用。突出优点: • 大空心轴直径(钢光栅尺带的最大直径达10 m)
• 较高轴速,最高达20 000 rpm • 无轴封带来的附加启动扭矩 • 非整圆版 • 可带功能安全特性
光学扫描的模块型角度编码器提供多种 光栅基体: • ERP/ERO:带轮毂的玻璃圆光栅码盘 • ERA/ECA 4000:钢光栅鼓 • ERA 7000/8000:钢带光栅尺
由于这些角度编码器未提供外壳,因此需要通过正确安装来确保满足防护等级的要求。
有关选型指南信息,请参见第8/页9
磁电扫描的模块型角度编码器坚固耐用的ERM编码器特别适用于生产型机床。大内径、较小的外形尺寸和结构紧凑的读数头特别适用于以下应用 • 车床C轴, • 简单回转和摆动轴(例如直驱系统的 速度控制或安装在齿轮传动中),
• 铣床主轴或辅助轴的定向。
有关选型指南信息,请参见第6/页7
带K 16扁平联轴器的ROD 880增量式角度编码器
ERA 4000增量式角度编码器
ERM 2000增量式角度编码器
更多信息:
有关封闭式角度编码器的更多信息,请访问www.heidenhain.com.cn或查看封闭式角度编码器和光学扫描的模块型角度编码器样本。
概要
6
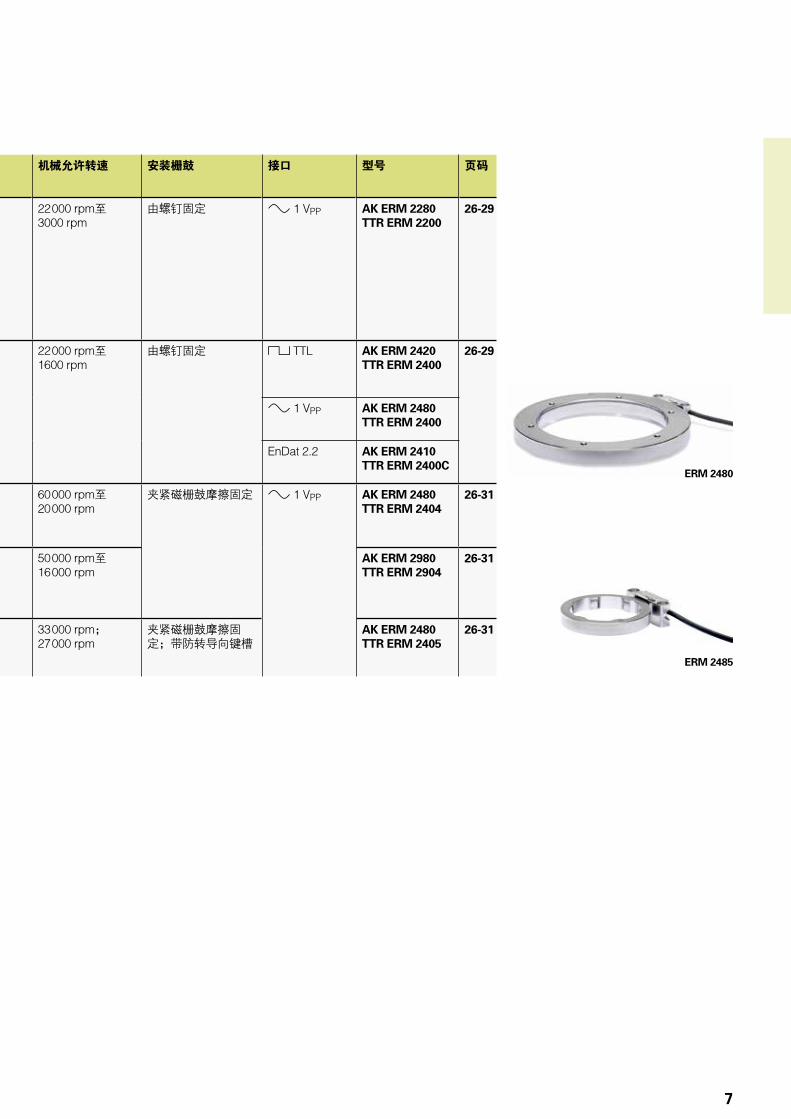
外形尺寸,单位mm 直径 信号周期数 栅距 机械允许转速 安装栅鼓 接口 型号 页码
ERM 2200系列 D1:40 mm至410 mmD2: 64.37 mm至452.64
mm
1024至7200 200 µm 22 000 rpm至3000 rpm
由螺钉固定 » 1 VPP AK ERM 2280TTR ERM 2200
26-29
ERM 2400系列 D1:40 mm至512 mmD2: 64.37 mm至603.52
mm
512至4800 400 µm 22 000 rpm至1600 rpm
由螺钉固定 « TTL AK ERM 2420TTR ERM 2400
26-29
» 1 VPP AK ERM 2480TTR ERM 2400
EnDat 2.2 AK ERM 2410TTR ERM 2400C
ERM 2404系列 D1:30 mm至100 mmD2: 45.26 mm至128.75
mm
360至1024 400 µm 60 000 rpm至20 000 rpm
夹紧磁栅鼓摩擦固定 » 1 VPP AK ERM 2480TTR ERM 2404
26-31
ERM 2904系列 D1:35 mm至100 mmD2: 45.43 mm至120.96
mm
180至400 1000 µm 50 000 rpm至16 000 rpm
AK ERM 2980TTR ERM 2904
26-31
ERM 2405系列 D1:40 mm;55 mmD2: 64.37 mm;75.44 mm
512;600 400 µm 33 000 rpm;27 000 rpm
夹紧磁栅鼓摩擦固定;带防转导向键槽
AK ERM 2480TTR ERM 2405
26-31
选型指南磁电扫描的模块型角度编码器
7
外形尺寸,单位mm 直径 信号周期数 栅距 机械允许转速 安装栅鼓 接口 型号 页码
ERM 2200系列 D1:40 mm至410 mmD2: 64.37 mm至452.64
mm
1024至7200 200 µm 22 000 rpm至3000 rpm
由螺钉固定 » 1 VPP AK ERM 2280TTR ERM 2200
26-29
ERM 2400系列 D1:40 mm至512 mmD2: 64.37 mm至603.52
mm
512至4800 400 µm 22 000 rpm至1600 rpm
由螺钉固定 « TTL AK ERM 2420TTR ERM 2400
26-29
» 1 VPP AK ERM 2480TTR ERM 2400
EnDat 2.2 AK ERM 2410TTR ERM 2400C
ERM 2404系列 D1:30 mm至100 mmD2: 45.26 mm至128.75
mm
360至1024 400 µm 60 000 rpm至20 000 rpm
夹紧磁栅鼓摩擦固定 » 1 VPP AK ERM 2480TTR ERM 2404
26-31
ERM 2904系列 D1:35 mm至100 mmD2: 45.43 mm至120.96
mm
180至400 1000 µm 50 000 rpm至16 000 rpm
AK ERM 2980TTR ERM 2904
26-31
ERM 2405系列 D1:40 mm;55 mmD2: 64.37 mm;75.44 mm
512;600 400 µm 33 000 rpm;27 000 rpm
夹紧磁栅鼓摩擦固定;带防转导向键槽
AK ERM 2480TTR ERM 2405
26-31
ERM 2480
ERM 2485

8
系列 版本和安装 外形尺寸单位 mm
直径 D1/D2
光栅精度 机械允许转速1) 接口 信号周期数/圈 参考点 型号 更多信息
钢栅鼓光栅的角度编码器
ECA 40002)3) 三点定心的钢光栅鼓 D1: 70 mm至512 mm
D2: 104.63 mm至560.46 mm
± 3"至±1.5" 15 000 rpm 至 8500 rpm
EnDat 2.2 – – ECA 4412 样本:光学扫描的模块型角度编码器
发那科Þi ECA 4492 F
三菱 ECA 4492 M
松下 ECA 4492 P
钢光栅鼓带定心环 ± 3.7"至±2" EnDat 2.2 ECA 4410
发那科Þi ECA 4490 F
三菱 ECA 4490 M
松下 ECA 4490 P
ERA 4x80 三点定心的钢光栅鼓 D1: 40 mm至512 mm
D2: 76.5 mm至560.46 mm
± 5"至±2" 10 000 rpm至 1500 rpm
» 1 VPP 12 000至 52 000
距离编码或 一个
ERA 4280 C
6000至44 000 ERA 4480 C
3000至13 000 ERA 4880 C
钢光栅鼓带定心环 D1: 40 mm至270 mm
D2: 76.5 mm至331.31 mm
± 4"至±1.7" 10 000 rpm 至 2500 rpm
» 1 VPP 12 000至 52 000
距离编码或 一个
ERA 4282 C
钢光栅尺带的角度编码器
ERA 7000 内圈安装的钢光栅尺带,整圆版4);钢光栅尺带张紧在外圆周处
458.62 mm至1146.10 mm
± 3.9"至 ± 1.6"
250 rpm 至 220 rpm
» 1 VPP 36 000至 90 000
距离编码 ERA 7480 C 样本:光学扫描的模块型角度编码器
ERA 8000 外圈安装的钢光栅尺带,整圆版4);钢光栅尺带张紧在外圆周处
458.11 mm至1145.73 mm
± 4.7"至 ± 1.9"
≈ 45 rpm » 1 VPP 36 000至 90 000
距离编码 ERA 8480 C
1) 工作中可能受电气允许转速限制 2) 也可提供功能安全特性版3) 也适用于真空应用4) 如果需要非整圆版,可按要求提供
选型指南光学扫描的模块型角度编码器

9
ERA 4000
ERA 7480
ERA 8480
ECA 4000
系列 版本和安装 外形尺寸单位 mm
直径 D1/D2
光栅精度 机械允许转速1) 接口 信号周期数/圈 参考点 型号 更多信息
钢栅鼓光栅的角度编码器
ECA 40002)3) 三点定心的钢光栅鼓 D1: 70 mm至512 mm
D2: 104.63 mm至560.46 mm
± 3"至±1.5" 15 000 rpm 至 8500 rpm
EnDat 2.2 – – ECA 4412 样本:光学扫描的模块型角度编码器
发那科Þi ECA 4492 F
三菱 ECA 4492 M
松下 ECA 4492 P
钢光栅鼓带定心环 ± 3.7"至±2" EnDat 2.2 ECA 4410
发那科Þi ECA 4490 F
三菱 ECA 4490 M
松下 ECA 4490 P
ERA 4x80 三点定心的钢光栅鼓 D1: 40 mm至512 mm
D2: 76.5 mm至560.46 mm
± 5"至±2" 10 000 rpm至 1500 rpm
» 1 VPP 12 000至 52 000
距离编码或 一个
ERA 4280 C
6000至44 000 ERA 4480 C
3000至13 000 ERA 4880 C
钢光栅鼓带定心环 D1: 40 mm至270 mm
D2: 76.5 mm至331.31 mm
± 4"至±1.7" 10 000 rpm 至 2500 rpm
» 1 VPP 12 000至 52 000
距离编码或 一个
ERA 4282 C
钢光栅尺带的角度编码器
ERA 7000 内圈安装的钢光栅尺带,整圆版4);钢光栅尺带张紧在外圆周处
458.62 mm至1146.10 mm
± 3.9"至 ± 1.6"
250 rpm 至 220 rpm
» 1 VPP 36 000至 90 000
距离编码 ERA 7480 C 样本:光学扫描的模块型角度编码器
ERA 8000 外圈安装的钢光栅尺带,整圆版4);钢光栅尺带张紧在外圆周处
458.11 mm至1145.73 mm
± 4.7"至 ± 1.9"
≈ 45 rpm » 1 VPP 36 000至 90 000
距离编码 ERA 8480 C
1) 工作中可能受电气允许转速限制 2) 也可提供功能安全特性版3) 也适用于真空应用4) 如果需要非整圆版,可按要求提供

10
选型指南绝对式封闭角度编码器
系列 外形尺寸单位 mm
系统精度 机械允许转速 位置值/圈 接口 增量信号 信号周期数/圈 型号 更多信息
内置定子联轴器
RCN 2000 ±5" 1500 rpm 67 108 864 � 26 bit EnDat 2.2 » 1 VPP 16 384 RCN 2380 样本:封闭式 角度编码器
EnDat 2.2 – – RCN 2310
发那科Þi – – RCN 2390 F
三菱 – – RCN 2390 M
±2.5" 268 435 456 � 28 bit EnDat 2.2 » 1 VPP 16 384 RCN 2580
EnDat 2.2 – – RCN 2510
发那科Þi – – RCN 2590 F
三菱 – – RCN 2590 M
RCN 5000 ±5" 1500 rpm 67 108 864 � 26 bit EnDat 2.2 » 1 VPP 16 384 RCN 5380
EnDat 2.2 – – RCN 5310
发那科Þi – – RCN 5390 F
三菱 – – RCN 5390 M
±2.5" 268 435 456 � 28 bit EnDat 2.2 » 1 VPP 16 384 RCN 5580
EnDat 2.2 – – RCN 5510
发那科Þi – – RCN 5590 F
三菱 – – RCN 5590 M
RCN 8000 ±2" 500 rpm 536 870 912 � 29 bit EnDat 2.2 » 1 VPP 32 768 RCN 8380
EnDat 2.2 – – RCN 8310
发那科Þi – – RCN 8390 F
三菱 – – RCN 8390 M
±1" EnDat 2.2 » 1 VPP 32 768 RCN 8580
EnDat 2.2 – – RCN 8510
发那科Þi – – RCN 8590 F
三菱 – – RCN 8590 M
安装式定子联轴器
ECN 200 ±10" 3000 rpm 33 554 432 � 25 bit EnDat 2.2 » 1 VPP 2048 ECN 225 样本:封闭式 角度编码器
EnDat 2.2 – – ECN 225
8 388 608 � 23 bit 发那科Þ – – ECN 223 F
三菱 – – ECN 223 M
60

11
RCN 2000
RCN 5000
RCN 8000 ¬¹60 mm
RCN 8000 ¬ 100 mm
ECN 200 ¬ 50 mm
系列 外形尺寸单位 mm
系统精度 机械允许转速 位置值/圈 接口 增量信号 信号周期数/圈 型号 更多信息
内置定子联轴器
RCN 2000 ±5" 1500 rpm 67 108 864 � 26 bit EnDat 2.2 » 1 VPP 16 384 RCN 2380 样本:封闭式 角度编码器
EnDat 2.2 – – RCN 2310
发那科Þi – – RCN 2390 F
三菱 – – RCN 2390 M
±2.5" 268 435 456 � 28 bit EnDat 2.2 » 1 VPP 16 384 RCN 2580
EnDat 2.2 – – RCN 2510
发那科Þi – – RCN 2590 F
三菱 – – RCN 2590 M
RCN 5000 ±5" 1500 rpm 67 108 864 � 26 bit EnDat 2.2 » 1 VPP 16 384 RCN 5380
EnDat 2.2 – – RCN 5310
发那科Þi – – RCN 5390 F
三菱 – – RCN 5390 M
±2.5" 268 435 456 � 28 bit EnDat 2.2 » 1 VPP 16 384 RCN 5580
EnDat 2.2 – – RCN 5510
发那科Þi – – RCN 5590 F
三菱 – – RCN 5590 M
RCN 8000 ±2" 500 rpm 536 870 912 � 29 bit EnDat 2.2 » 1 VPP 32 768 RCN 8380
EnDat 2.2 – – RCN 8310
发那科Þi – – RCN 8390 F
三菱 – – RCN 8390 M
±1" EnDat 2.2 » 1 VPP 32 768 RCN 8580
EnDat 2.2 – – RCN 8510
发那科Þi – – RCN 8590 F
三菱 – – RCN 8590 M
安装式定子联轴器
ECN 200 ±10" 3000 rpm 33 554 432 � 25 bit EnDat 2.2 » 1 VPP 2048 ECN 225 样本:封闭式 角度编码器
EnDat 2.2 – – ECN 225
8 388 608 � 23 bit 发那科Þ – – ECN 223 F
三菱 – – ECN 223 M
12
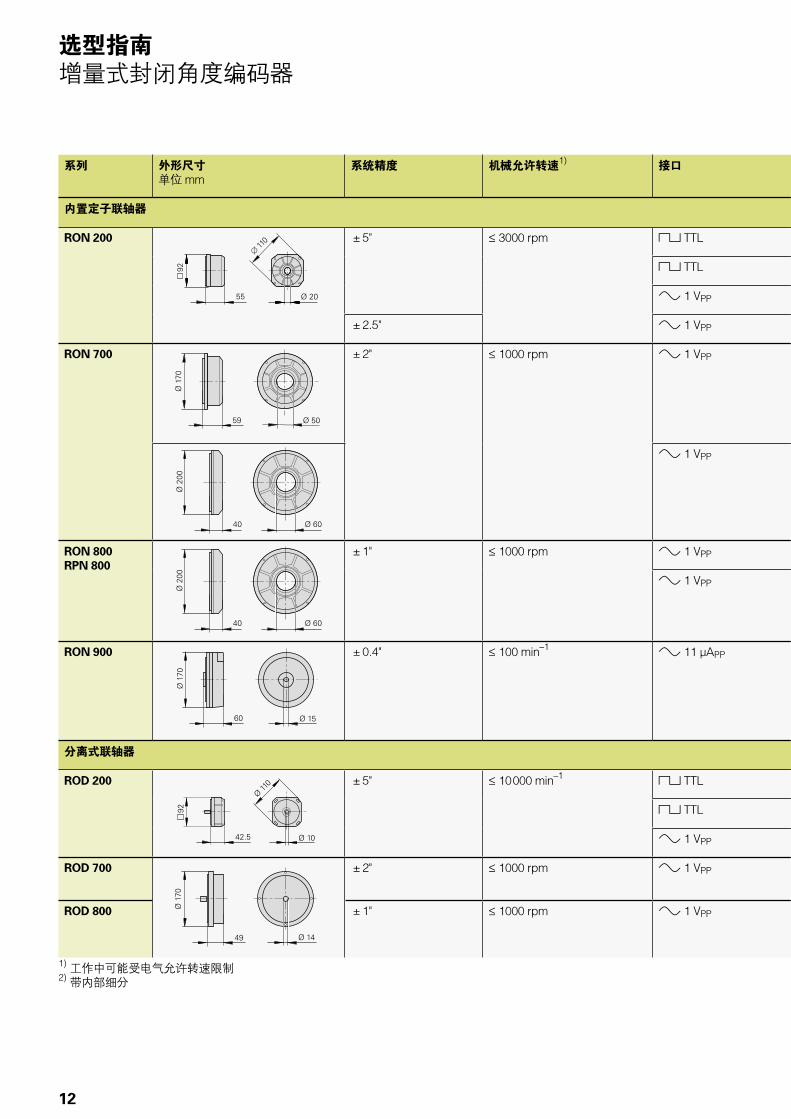
系列 外形尺寸单位 mm
系统精度 机械允许转速1) 接口 信号周期数/圈 型号 更多信息
内置定子联轴器
RON 200 ±5" 3000 rpm « TTL 18 0002) RON 225 样本:封闭式角度 编码器
« TTL 180 000/90 0002) RON 275
» 1 VPP 18 000 RON 285
±2.5" » 1 VPP 18 000 RON 287
RON 700 ±2" 1000 rpm » 1 VPP 18 000 RON 785
» 1 VPP 18 000/36 000 RON 786
RON 800RPN 800
±1" 1000 rpm » 1 VPP 36 000 RON 886
» 1 VPP 180 000 RPN 886
RON 900
±0.4" 100 min–1 » 11 µAPP 36 000 RON 905
分离式联轴器
ROD 200 ±5" 10 000 min–1 « TTL 18 0002) ROD 220 样本: 封闭式角度编码器
« TTL 180 0002) ROD 270
» 1 VPP 18 000 ROD 280
ROD 700 ±2" 1000 rpm » 1 VPP 18 000/36 000 ROD 780
ROD 800
±1" 1000 rpm » 1 VPP 36 000 ROD 880
1) 工作中可能受电气允许转速限制2) 带内部细分
选型指南增量式封闭角度编码器

13
系列 外形尺寸单位 mm
系统精度 机械允许转速1) 接口 信号周期数/圈 型号 更多信息
内置定子联轴器
RON 200 ±5" 3000 rpm « TTL 18 0002) RON 225 样本:封闭式角度 编码器
« TTL 180 000/90 0002) RON 275
» 1 VPP 18 000 RON 285
±2.5" » 1 VPP 18 000 RON 287
RON 700 ±2" 1000 rpm » 1 VPP 18 000 RON 785
» 1 VPP 18 000/36 000 RON 786
RON 800RPN 800
±1" 1000 rpm » 1 VPP 36 000 RON 886
» 1 VPP 180 000 RPN 886
RON 900
±0.4" 100 min–1 » 11 µAPP 36 000 RON 905
分离式联轴器
ROD 200 ±5" 10 000 min–1 « TTL 18 0002) ROD 220 样本: 封闭式角度编码器
« TTL 180 0002) ROD 270
» 1 VPP 18 000 ROD 280
ROD 700 ±2" 1000 rpm » 1 VPP 18 000/36 000 ROD 780
ROD 800
±1" 1000 rpm » 1 VPP 36 000 ROD 880
1) 工作中可能受电气允许转速限制2) 带内部细分
ROD 780
RON 285
RON 786
RON 905
ROD 280

14
应用领域
车床C轴
典型要求 • 多种空心轴直径 • 抗污染 • 安装简单
适用编码器 • ERM 2400系列 • ERM 2200系列可能适用
多年来,ERM编码器已成为车床C轴的优选编码器。它不仅抗污染性能好,而且内径大的特点使其在棒料加工中的限制最少。
由于ERM编码器的结构特点,其磁栅通常安装在直径大于工件的圆周处。因此编码器的位置误差对工件精度的影响相对较小。
生产效率和加工质量的要求在不断提高。工件日趋复杂和零件小批量生产的工作条件也更富于变化。这一情况在生产型机床整机结构和机械设计中必须给予考虑,以保证生产型机床工作高效和精确。
坚固耐用的ERM模块式磁栅编码器特别适用于生产型机床。大内径、较小的外形尺寸和结构紧凑的读数头特别适用于以下应用 • 车床C轴, • 回转和摆动轴(例如,直驱系统的速度控制或安装在齿轮传动中),
• 铣床主轴或辅助轴的定向。
例如,栅鼓的线数达2048线和直径为257.5 mm,单信号周期的位置误差大约为2 µm。对于直径100 mm的工件,其位置误差仅0.8 µm。工件直径越小精度越好。
因此,ERM编码器的精度和重复精度完全能满足在车床上铣削加工(典型C轴加工)对精度的要求。

15
旋转和摆动轴
典型要求 • 中等精度到高精度 • 大直径空心轴 • 抗污染
适用编码器 • ERM 2200系列
回转工作台和摆动轴的位置和速度控制需要编码器输出高质量信号。光学测量基准的编码器,例如RCN系列,能最理想地满足这类应用要求。对于中等精度要求,也可选用模块型磁栅编码器。由于ERM 2200编码器的信号周期200 µm比较小,其突出特点是单信号周期内位置误差特别小,因此能实现比较稳定的轴速。此外,模块式磁栅编码器的典型优点,例如抗污染性能和较大内径,使其比较适合这类应用。
铣床的主轴
典型要求 • 高轴速 • 安装空间小
适用编码器 • ERM 2404、ERM 2405系列 • ERM 2904系列
主轴是铣床的重要部件并对铣床性能有重大影响。其特性取决于主轴的结构设计、驱动和轴承系统。但编码器也对主轴的性能有决定性的影响。编码器必须支持高转速且必须具有足够刚性。这些编码器完全支持高达60 000 rpm的转速。此外编码器还满足紧凑尺寸要求。
如果一台机床进行铣车复合加工,对主轴精度的要求更高。该应用最好采用400 µm信号周期的编码器。

16
特点
海德汉ERM模块式磁栅编码器有以下特性:
对污染不敏感机床编码器常常接触大量冷却润滑液。特别是对高速和大直径主轴,密封非常困难。 ERM模块型磁栅编码器抗污染能力强的特点是它的突出优点:即使在湿度大、多尘和含油的环境中也能正常工作。
大空心轴满足安装空间有限的应用要求 ERM编码器的特点是尺寸小和内径大,最大内径410 mm。如果需要更大直径,也可按要求提供。
安装简易磁栅鼓和读数头的安装非常简单且不需要太多调整。栅鼓用定心环固定在内圆周处。通过间隔片可方便地保持读数头位置,使其与栅鼓保持正确的相互位置。如果满足推荐的安装公差要求,也不一定需要检查输出信号或重新进行调整。
高轴速磁栅鼓特别适合高轴速应用。技术参数中的最高允许转速还适用于极高载荷情况时。也就是说允许用最高允许转速和要求更严格的往复运动连续工作。即使持续制动和加速过程中的往复运动,也允许用最高允许转速。往复运动是以1000万次交替载荷为基础,因此能满足疲劳强度要求。
ERM编码器即使工作在最高转速下,也非常安静。无附带噪音,例如齿轮运动声音。
高质量信号ERM模块型磁栅编码器拥有输出信号质量高的特点:它与信号周期一起,信号质量对单信号周期内位置误差有决定性影响。对于模块型磁栅编码器以及许多海德汉的其它编码器,该值优于信号周期的1%。对于ERM 2200和ERM 2400系列编码器,单信号周期位置误差通常小于信号周期的0.5 %。
纯串行接口除输出增量信号外,也能通过EnDat 2.2接口传输位置值信息。正弦扫描信号在读数头中被高倍频细分且其计数功能将细分的信号转换成位置值。与所有增量式编码器一样,借助参考点确定绝对原点。为加快和简化参考点回零操作,这些编码器的栅鼓提供距离编码器参考点。
EnDat 2.2除具有串行传输位置值优点外,还有其他大量优点,例如自动配置,监测和诊断功能以及高可靠性地传输数据。
显示器显示预留功能的评估数据 (例如用ATS软件)
ERM磁栅鼓

17
测量原理
测量基准海德汉公司编码器的测量基准是周期性格栅—磁栅。磁栅编码器采用可磁化的合金钢作为磁栅基体材料。写磁头沿不同方向产生局部强磁场以形成由南极和北极组成的磁栅(MAGNODUR工艺)。在圆周处提供以下不同的栅距: ≈ 200 µm,ERM 2200系列 ≈ 400 µm,ERM 2400系列 ≈ 1000 µm,ERM 2900系列
由于电磁相互作用的距离非常小而且要求很小的扫描间隙,更细小的磁栅需要更严格的安装公差。
磁电扫描永磁的MAGNODUR磁栅由磁电传感器扫描。磁电传感器由磁阻轨组成,磁阻随磁场变化而变化。当电压作用于该传感器和磁栅鼓相对读数头运动时,流过的电流基于磁场被调制。
磁电传感器的特别排列和用玻璃基体的磁电传感器确保信号的高质量。此外,由于扫描面积大,因此噪声波被过滤。这些都是减小单信号周期内位置误差的必备条件。
ERM磁栅鼓 磁阻扫描原理
测量基准
扫描掩膜
未图示B+和B–的磁电传感器
一个单独磁轨的磁结构形成参考点信号。它使绝对位置值精确到一个测量步距。
磁电扫描通常用于中等精度应用,或被加工件直径相对磁栅鼓直径较小的应用。

18
Þ1 = (abs A–sgn A–1) x N + (sgn A–sgn D) x abs MRR
和
A = 2 x abs MRR–N
距离编码参考点的绝对参考点位置用两个参考点间信号周期数和以下公式计算:
2 2
说明:Þ1 = 第一个移过的参考点相对零点位置
的绝对角度位置,单位度
abs = 绝对值
sgn = 代数符号(“+1”或“–1”)
MRR = 移过的参考点间的被测距离, 单位度
N = 两个固定参考点间的名义增量值 (见表)
GP = 栅距( 360° )
D = 旋转方向(+1或–1) 按照配合尺寸的旋转为“+1”
线数
GP
TTR ERM 2200 C信号周期数 参考点数 名义增量 N
1024 1200 1440 1800 2048 2400 2800 3392 4096 5200 7200
16 24 30 36 32 40 50 32 64 52 90
45° 30° 24° 20° 22.5° 18° 14.4° 22.50° 11.25° 13.85° 8°
TTR ERM 2400 C信号周期数 参考点数 名义增量 N
512 600 720 900 1024 1200 1400 1696 2048 2600 3600 3850 4800
16 20 24 30 32 30 40 32 32 52 60 70 80
45° 36° 30° 24° 22.5° 24° 18° 22.5° 22.5° 13.85° 12° 10.3° 9°
增量测量法增量测量法的磁栅由周期性栅线组成。位置信息通过计算自某个设置的原点开始的增量数(测量步距数)获得。轴速通过一定时间内的位置变化通过数学计算确定。
由于必须用绝对参考点确定位置值,因此栅鼓还有一个参考点轨或多个参考点。由参考点确定的磁栅尺绝对位置值可以精确到一个测量步距。因此,必须通过扫描参考点建立绝对基准点或确定上次选择的原点。对于距离编码参考点的栅鼓,只需扫描两个相邻参考点就能建立绝对参考值 (参见表中名义增量值N)。 凡是距离编码参考点的栅鼓,其型号最后均带字母“C”(例如TTR ERM 2200 C)。
19
测量精度
角度测量精度主要取决于 • 磁栅质量, • 磁栅基体稳定性, • 扫描质量, • 信号处理电子电路质量, • 磁栅相对轴承的偏心量, • 轴承误差,和 • 与被测轴的连接。
这些影响因素包括编码器的误差和应用方面的误差。为了评估可获得的整体精度,必须考虑其中每一项影响因素。
编码器方面的误差有关编码器方面的误差,参见“技术参数”: • 磁栅精度 • 单信号周期内细分误差
光栅精度磁栅精度±a由其质量决定。包括 • 磁栅的一致性和栅距, • 磁栅与其基体的相互位置关系,和 • 磁栅基体的稳定性,也用于保证安装条件下的精度。
磁栅精度±a由在理想条件下通过批量生产的读数头在信号周期整数倍位置处测量的细分误差确定。
单信号周期内细分误差单信号周期内细分误差±u由扫描质量决定,对带脉冲波形滤波或计数电子电路的编码器,由信号处理电子电路质量决定。但对正弦输出信号的编码器,信号处理电子系统的误差由后续电子电路决定。
以下每一个因素都影响测量结果: • 信号周期大小 • 磁栅一致性和栅距 • 扫描滤波器结构质量 • 传感器特性 • 模拟信号后续处理的稳定性和动态性能
确定单信号周期内细分误差时,也必须考虑这些影响因素。
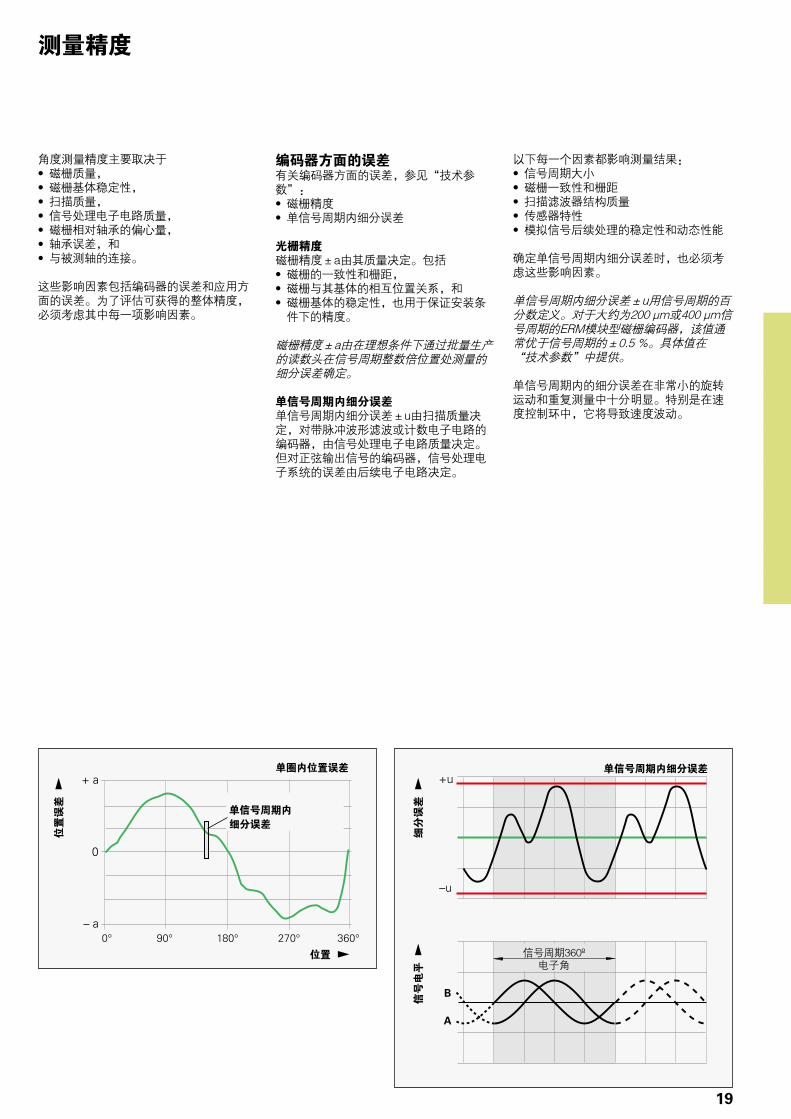
单信号周期内细分误差±u用信号周期的百分数定义。对于大约为200 µm或400 µm信号周期的ERM模块型磁栅编码器,该值通常优于信号周期的±0.5 %。具体值在 “技术参数”中提供。
单信号周期内的细分误差在非常小的旋转运动和重复测量中十分明显。特别是在速度控制环中,它将导致速度波动。
单圈内位置误差
单信号周期内 细分误差
单信号周期内细分误差
信号周期360º 电子角
位置
误差
位置
信号
电平
细
分误
差
20
磁栅相对轴承的偏心量
读数头
不同偏心值e造成的测量偏差¹j与磁栅直径D的函数关系
测量¹j,
单位
角秒
磁栅直径D,单位mm
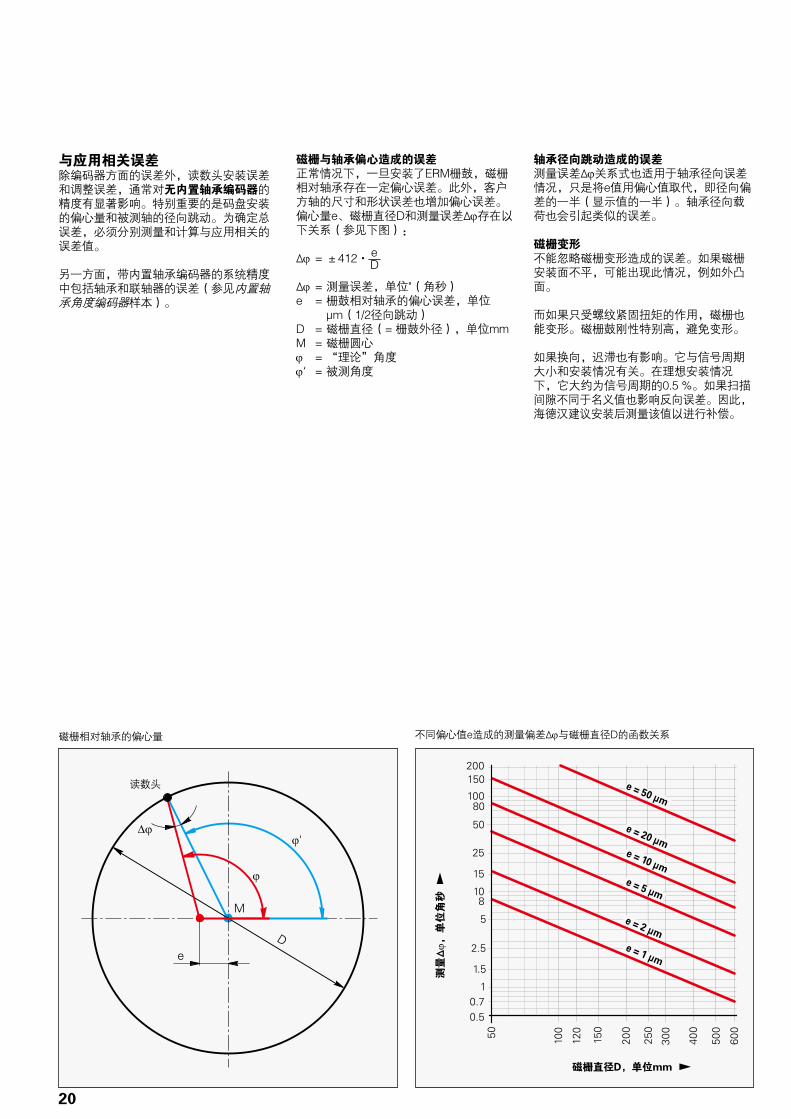
与应用相关误差除编码器方面的误差外,读数头安装误差和调整误差,通常对无内置轴承编码器的精度有显著影响。特别重要的是码盘安装的偏心量和被测轴的径向跳动。为确定总误差,必须分别测量和计算与应用相关的误差值。
另一方面,带内置轴承编码器的系统精度中包括轴承和联轴器的误差(参见内置轴承角度编码器样本)。
磁栅与轴承偏心造成的误差正常情况下,一旦安装了ERM栅鼓,磁栅相对轴承存在一定偏心误差。此外,客户方轴的尺寸和形状误差也增加偏心误差。偏心量e、磁栅直径D和测量误差¹j存在以下关系(参见下图):
¹j = ±412·De
¹j = 测量误差,单位"(角秒)e = 栅鼓相对轴承的偏心误差,单位
µm(1/2径向跳动)D = 磁栅直径(= 栅鼓外径),单位mmM = 磁栅圆心j = “理论”角度j‘ = 被测角度
轴承径向跳动造成的误差测量误差¹j关系式也适用于轴承径向误差情况,只是将e值用偏心值取代,即径向偏差的一半(显示值的一半)。轴承径向载荷也会引起类似的误差。
磁栅变形不能忽略磁栅变形造成的误差。如果磁栅安装面不平,可能出现此情况,例如外凸面。
而如果只受螺纹紧固扭矩的作用,磁栅也能变形。磁栅鼓刚性特别高,避免变形。
如果换向,迟滞也有影响。它与信号周期大小和安装情况有关。在理想安装情况下,它大约为信号周期的0.5 %。如果扫描间隙不同于名义值也影响反向误差。因此,海德汉建议安装后测量该值以进行补偿。

21
机械结构类型和装配
安装磁栅鼓TTR ERM 2400TTR ERM 2200
安装磁栅鼓TTR ERM 2405
安装磁栅鼓ERM 2404栅鼓TTR ERM 2904
ERM模块型编码器由磁栅鼓和相应的读数头组成。读数头与磁栅间的相对位置唯一地由机床轴承决定。但ERM模块式编码器的特殊结构设计使它比较容易安装和调整。如果实际使用中满足技术要求(参见技术参数),能保证磁栅精度数据和单信号周期内细分误差数据。
版本ERM模块型磁栅编码器提供多种信号周期(ERM 2200:≈ 200 µm,ERM 2400:≈ 400 µm,ERM 2900:≈ 1 mm)。因此相同外径的线数不同。
磁栅鼓有三个版本。主要区别是安装类型。全部磁栅鼓的内径都有定心环。
TTR ERM 2200和TTR ERM 2400磁栅鼓安装磁栅鼓时,使其滑入配合轴中并用螺栓固定。
TTR ERM 2x0x磁栅鼓TTR ERM 2404、TTR ERM 2405和TTR ERM 2904栅鼓只能用摩擦锁紧方式连接配合面。磁栅鼓固定方式与安装情况有关。必须将紧固力均匀作用在整个磁栅鼓安装面上。所需的安装件与用户的设备结构有关,因此需由用户保证。连接摩擦力必须足够大以防止意外转动或轴向或径向倾斜,包括高速和加速运动时。严禁为了安装而改动磁栅鼓,例如钻孔或锪孔。
TTR ERM 2404和TTR ERM 2904版的栅鼓内圆为光滑表面。只用摩擦紧固方式连接(磁栅鼓的固定)防止其意外转动。TTR ERM 2405磁栅鼓带键槽。导向键只用于避免意外转动,不能用于传递扭矩。磁栅鼓内的特殊形状使其在最高允许转速时也能保持稳定。
设计安装件设计安装件时,必须使用栅鼓的以下技术参数:
允许的表面压力:pperm = 100 N/mm2
热膨胀系数:Þtherm = 10·10–6 K–1
正面配合面的平均表面粗糙度:RZ 8 适用于外径< 326.9 mm的栅鼓RZ 16 适用于外径≥ 326.9 mm的栅鼓

HEIDENHAIN
HEIDENHAIN
HEIDENHAIN
TTR ERM 2400
HEIDENHAIN
22
安装读数头,例如AK ERM 2480允许的电缆出线
右侧相切
左侧相切
轴向
信号幅值与扫描间隙(安装间隙)典型关系图
扫描间隙变化,单位µm
信号
幅值
,单
位V
PP
确定磁栅鼓中心由于最终总精度主要由安装误差决定(主要是偏心误差),必须特别注意栅鼓的定心。
定心环定心磁栅鼓压在或箍在轴上。该方法简单,需要轴几何尺寸很准确和轴承高质量以满足相应精度要求。
栅鼓用定心环固定在内圆周处。对安装ERM 2x00磁栅鼓的轴,海德汉建议该轴尺寸略大。为方便安装,可用加热板缓慢预热磁栅鼓约10分钟时间,最高温度不能超过100°C。为检查径向跳动和确定最终偏差,建议安装前测试轴的旋转精度。
拆离螺纹孔用于拆下磁栅鼓。
安装读数头为安装读数头,将所提供的间隔片放在栅鼓的表面上。读数头压住间隔片并用螺栓固定,然后拆下间隔片。
磁栅测试膜测试膜用于使磁栅可见。这样用户可以方便地检查磁栅是否有任何损坏,例如被工具损坏等。需要清洁测试膜时,可用去磁设备去磁,因此可反复使用。测试膜和去磁设备为辅件。
安装间隙安装间隙(读数头与磁栅鼓间的间隙)与编码器的信号周期有关。因此,安装读数头的间隔片的厚度不同。如果磁栅与掩膜间的间隙与名义间隙值不同,对信号幅值有不利影响。
用两个读数头测量磁栅与轴承之间的偏心造成的误差通过相对第一个读数头180°± 5°对径位置处的第二个读数头补偿。两个读数头的增量信号通过外部高倍频细分的EIB 1500连接盒进行数字化补偿,在参考点回零后输出绝对位置值。(参见ERM 1500产品信息文件)。
≈ 200 µm
≈ 1000 µm
≈ 400 µm
23
系统测试海德汉公司的光栅尺常被集成到大型系统中。无论直线光栅尺具有怎样的技术参数,如果被应用在这样系统中,必须对整个系统进行综合测试。样本中给出的技术参数仅适用于特定光栅尺或编码器,而非整个系统。如果将光栅尺或编码器超范围使用或用于非目标应用,其风险由用户承担。在高安全性系统中,必须由高一级的系统在开机启动后测试编码器的位置值。
组装安装步骤和安装中必须确保的尺寸只以产品包装中提供的安装说明为准。因此,本样本中的所有安装信息仅供参考,不具约束力,不构成合同条款。
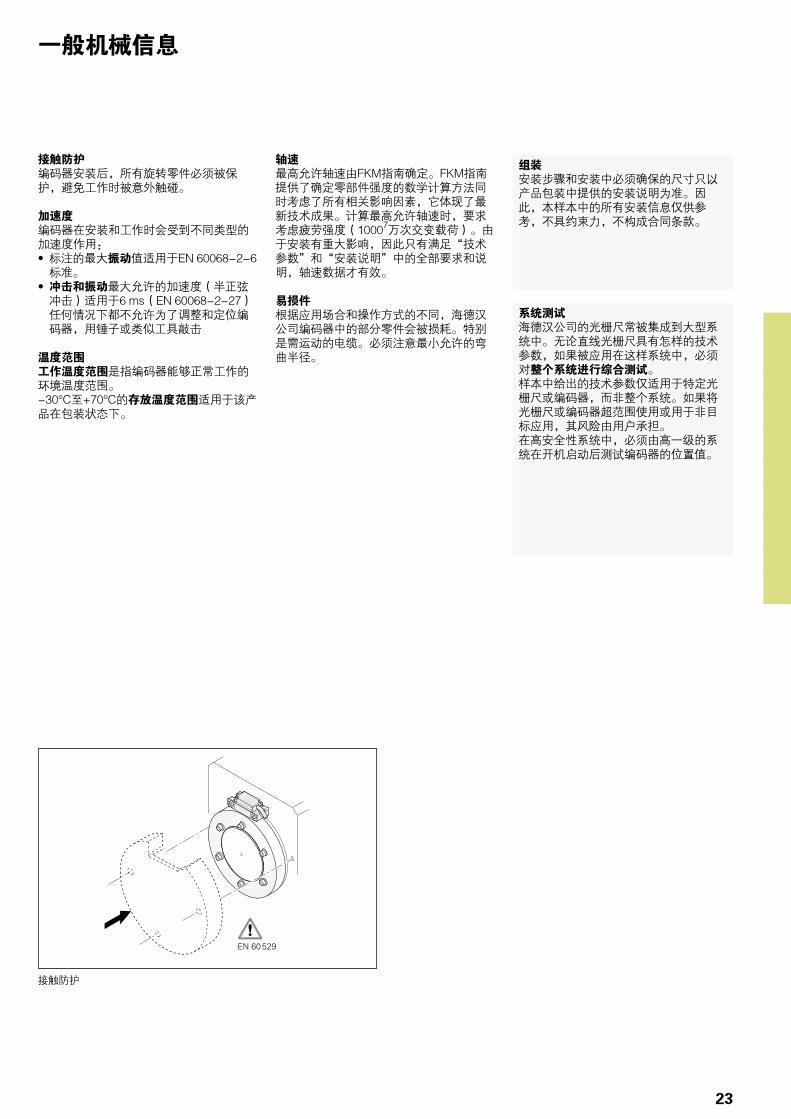
接触防护编码器安装后,所有旋转零件必须被保护,避免工作时被意外触碰。
加速度编码器在安装和工作时会受到不同类型的加速度作用: • 标注的最大振动值适用于EN 60068-2-6标准。
• 冲击和振动最大允许的加速度(半正弦冲击)适用于6 ms(EN 60068-2-27) 任何情况下都不允许为了调整和定位编码器,用锤子或类似工具敲击
温度范围工作温度范围是指编码器能够正常工作的环境温度范围。-30°C至+70°C的存放温度范围适用于该产品在包装状态下。
接触防护
轴速最高允许轴速由FKM指南确定。FKM指南提供了确定零部件强度的数学计算方法同时考虑了所有相关影响因素,它体现了最新技术成果。计算最高允许轴速时,要求考虑疲劳强度(10007万次交变载荷)。由于安装有重大影响,因此只有满足“技术参数”和“安装说明”中的全部要求和说明,轴速数据才有效。
易损件根据应用场合和操作方式的不同,海德汉公司编码器中的部分零件会被损耗。特别是需运动的电缆。必须注意最小允许的弯曲半径。
一般机械信息

24
机械连接的防松故障保护
除数据接口外,该编码器与电机间的机械连接也关系到安全性。电气驱动标准EN 61800-5-2定义了编码器与驱动间需考虑的机械连接松动或断开连接的故障。由于不能确保控制系统能检测到这类故障,多数情况下需要对机械连接松动提供故障防护措施。
机器制造商负责驱动系统的机械连接尺寸。 OEM厂商最好考虑机械结构的应用条件。但是,提供安全连接的客观证据十分消耗时间。为此,海德汉开发了ERM 2xx0系列编码器的机械故障防护措施并已获得型号验证确认。
机械故障防护的认证适用于编码器的广泛应用。也就是说,在以下工作条件下可以确保故障防护效果。较大的温度范围与多种材质特性以及最高允许的轴速和加速度需要栅鼓采用过盈配合。过盈配合的尺寸需要考虑全部安全因素,有必要用热缩方式安装栅鼓,且直接影响要求的组装温度。
机械故障防护的安装方式为可选项。如果安全措施不需要机械故障防护,固定栅鼓时也可以不采用过盈配合(参见尺寸下的W1)。
有关安装方式和前提条件,请见相应技术文档。
机械连接 固定 机械联轴器安全位置1) 受限制的特性值2)
栅鼓 根据尺寸图的过盈配合螺栓连接:3)
M5 ISO 4762 8.8
±0.025° • 冲击 • 最大角加速度 • 驱动轴的内径 • 驱动轴和定子的材质 • 安装温度
读数头 螺栓连接:3)
M4 ISO 4762 8.8
1) 故障防护只适用于明确要求的安装条件。2) 相比无故障防护的ERM 2xx03) B级摩擦系数,基于VDI 2230标准
25
材质必须符合配合轴和定子材质表中的数据要求。
安装温度有关螺纹连接的所有信息,均指安装温度为15 °C至35 °C时。
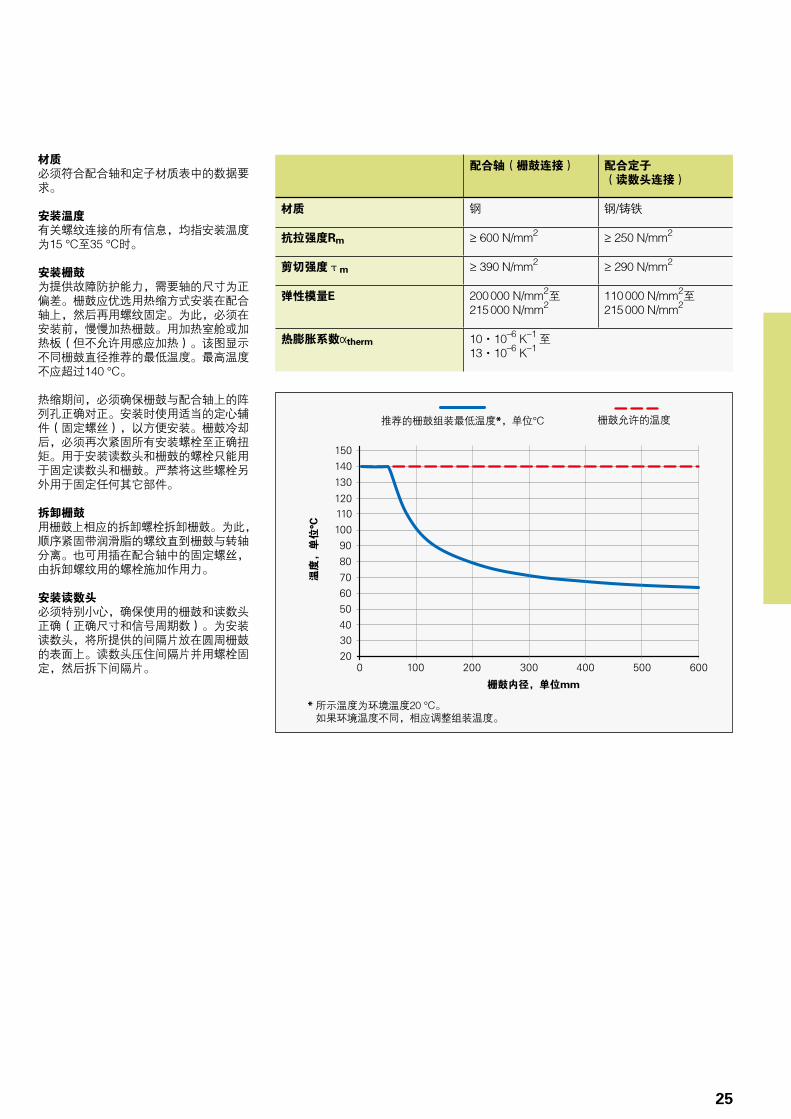
安装栅鼓为提供故障防护能力,需要轴的尺寸为正偏差。栅鼓应优选用热缩方式安装在配合轴上,然后再用螺纹固定。为此,必须在安装前,慢慢加热栅鼓。用加热室舱或加热板(但不允许用感应加热)。该图显示不同栅鼓直径推荐的最低温度。最高温度不应超过140 °C。
热缩期间,必须确保栅鼓与配合轴上的阵列孔正确对正。安装时使用适当的定心辅件(固定螺丝),以方便安装。栅鼓冷却后,必须再次紧固所有安装螺栓至正确扭矩。用于安装读数头和栅鼓的螺栓只能用于固定读数头和栅鼓。严禁将这些螺栓另外用于固定任何其它部件。
拆卸栅鼓用栅鼓上相应的拆卸螺栓拆卸栅鼓。为此,顺序紧固带润滑脂的螺纹直到栅鼓与转轴分离。也可用插在配合轴中的固定螺丝,由拆卸螺纹用的螺栓施加作用力。
安装读数头必须特别小心,确保使用的栅鼓和读数头正确(正确尺寸和信号周期数)。为安装读数头,将所提供的间隔片放在圆周栅鼓的表面上。读数头压住间隔片并用螺栓固定,然后拆下间隔片。
配合轴(栅鼓连接) 配合定子 (读数头连接)
材质 钢 钢/铸铁
抗拉强度Rm 600 N/mm2 250 N/mm2
剪切强度τm 390 N/mm2 290 N/mm2
弹性模量E 200 000 N/mm2至215 000 N/mm2
110 000 N/mm2至215 000 N/mm2
热膨胀系数Þtherm 10·10–6 K–1 至13·10–6 K–1
栅鼓允许的温度
栅鼓内径,单位mm
温度
,单
位°C
* 所示温度为环境温度20 °C。 如果环境温度不同,相应调整组装温度。
推荐的栅鼓组装最低温度*,单位°C

26
ERM 2200/2400/2900系列磁电扫描增量式角度编码器 • 带读数头和栅鼓 • 根据精度和转速要求提供多种栅距 • 用于旋转轴和主轴的多种栅鼓形状 • 多种栅鼓直径
ERM 2200
ERM 2900
读数头 栅距 200 µm 栅距 400 µm 栅距 1000 µm
AK ERM 2280 AK ERM 2480 AK ERM 2420 AK ERM 2410 AK ERM 2980
接口 » 1 VPP » 1 VPP TTL x 1,TTL x 2 EnDat 2.22) » 1 VPP
截止频率(-3dB)扫描频率
300 kHz–
– 350 kHz
––
≥ 300 kHz–
内部细分倍数 – 16 384(14 bit) –
时钟频率 – 8 MHz –
计算时间 tcal – 5 µs –
电气连接 电缆,1 m,带或不带 12针M23连接器
电缆,1 m,带 8针M12连接器
电缆,1 m, 带或不带 12针M23连接器
输出电缆 左侧或右侧相切 左侧或右侧相切、轴向
右侧相切 左侧或右侧相切、轴向
电源 DC 5 V ±0.5 V DC 3.6 V至14 V DC 5 V ±0.5 V
电流消耗(典型值) 150 mA(无负载) 5 V时: 90 mA (无负载)
150 mA(无负载)
功率消耗(最高) 3.6 V时:1080 mW; 14 V时:1300 mW
电缆长度1) 150 m 100 m 150 m
振动 55 Hz至2000 Hz
冲击 6 ms
冲击 6 ms, 带机械连接防松保护
400 m/s²(EN 60068-2-6)
1000 m/s²(EN 60068-2-27)
400 m/s²(EN 60068-2-27)
300 m/s² (EN 60068-2-6) 1000 m/s² (EN 60068-2-27) 400 m/s² (EN 60068-2-27)
400 m/s² (EN 60068-2-6) 1000 m/s² (EN 60068-2-27) 400 m/s² (EN 60068-2-27)
工作温度 -10 °C至60 °C -10 °C至100 °C
防护等级EN 60529 IP67
重量 读数头 连接电缆 M23连接器
30 g(无连接电缆) 37 g/m 50 g
1) 海德汉电缆2) 移过两个参考点后输出绝对位置值

27
读数头 栅距 200 µm 栅距 400 µm 栅距 1000 µm
AK ERM 2280 AK ERM 2480 AK ERM 2420 AK ERM 2410 AK ERM 2980
接口 » 1 VPP » 1 VPP TTL x 1,TTL x 2 EnDat 2.22) » 1 VPP
截止频率(-3dB)扫描频率
300 kHz–
– 350 kHz
––
≥ 300 kHz–
内部细分倍数 – 16 384(14 bit) –
时钟频率 – 8 MHz –
计算时间 tcal – 5 µs –
电气连接 电缆,1 m,带或不带 12针M23连接器
电缆,1 m,带 8针M12连接器
电缆,1 m, 带或不带 12针M23连接器
输出电缆 左侧或右侧相切 左侧或右侧相切、轴向
右侧相切 左侧或右侧相切、轴向
电源 DC 5 V ±0.5 V DC 3.6 V至14 V DC 5 V ±0.5 V
电流消耗(典型值) 150 mA(无负载) 5 V时: 90 mA (无负载)
150 mA(无负载)
功率消耗(最高) 3.6 V时:1080 mW; 14 V时:1300 mW
电缆长度1) 150 m 100 m 150 m
振动 55 Hz至2000 Hz
冲击 6 ms
冲击 6 ms, 带机械连接防松保护
400 m/s²(EN 60068-2-6)
1000 m/s²(EN 60068-2-27)
400 m/s²(EN 60068-2-27)
300 m/s² (EN 60068-2-6) 1000 m/s² (EN 60068-2-27) 400 m/s² (EN 60068-2-27)
400 m/s² (EN 60068-2-6) 1000 m/s² (EN 60068-2-27) 400 m/s² (EN 60068-2-27)
工作温度 -10 °C至60 °C -10 °C至100 °C
防护等级EN 60529 IP67
重量 读数头 连接电缆 M23连接器
30 g(无连接电缆) 37 g/m 50 g
1) 海德汉电缆2) 移过两个参考点后输出绝对位置值
28
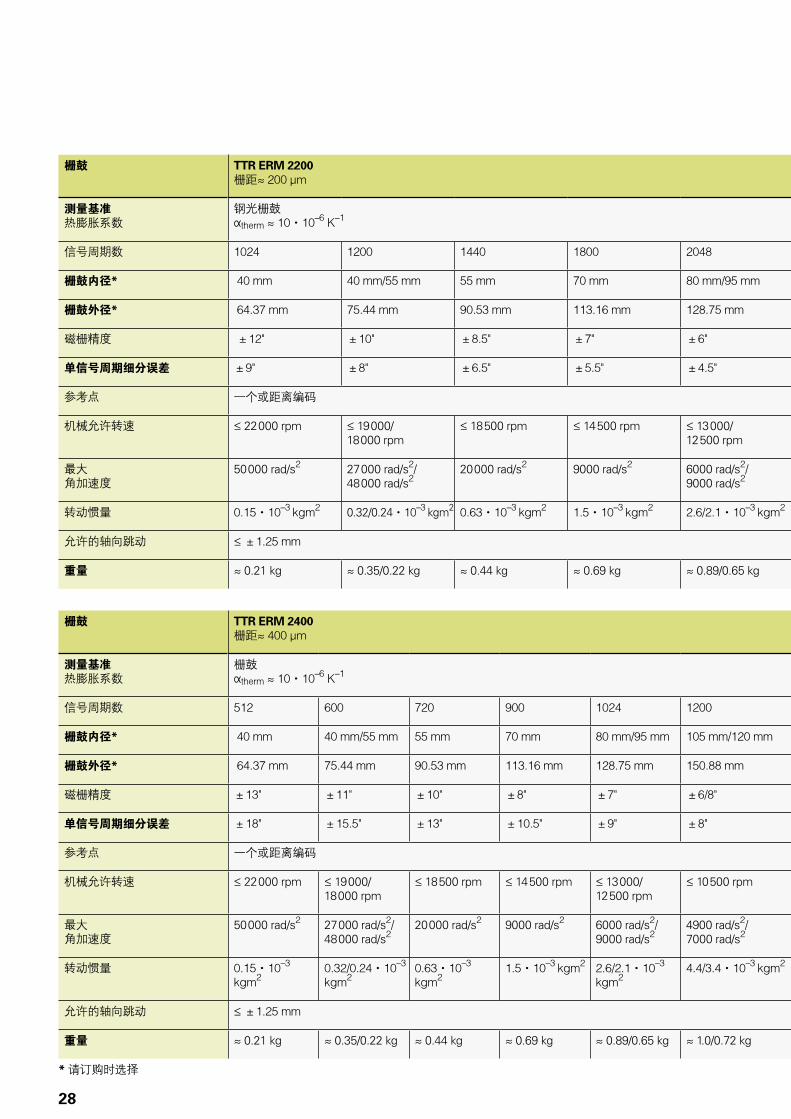
栅鼓 TTR ERM 2200 栅距 200 µm
测量基准热膨胀系数
钢光栅鼓Þtherm 10·10–6 K–1
信号周期数 1024 1200 1440 1800 2048 2400 2800 3392 4096 5200 7200
栅鼓内径* 40 mm 40 mm/55 mm 55 mm 70 mm 80 mm/95 mm 105 mm/120 mm 130 mm/140 mm 160 mm 180 mm/220 mm 260 mm/295 mm 380 mm/410 mm
栅鼓外径* 64.37 mm 75.44 mm 90.53 mm 113.16 mm 128.75 mm 150.88 mm 176.03 mm 213.24 mm 257.50 mm 326.90 mm 452.64 mm
磁栅精度 ±12" ±10" ±8.5" ±7" ±6" ±5.5/7" ±5/6" ±4" ±3.5/4.5" ±3/4" ±2.5/3.5"
单信号周期细分误差 ±9" ±8" ±6.5" ±5.5" ±4.5" ±4" ±4" ±3" ±2.5" ±2" ±1.5"
参考点 一个或距离编码
机械允许转速 22 000 rpm 19 000/ 18 000 rpm
18 500 rpm 14 500 rpm 13 000/ 12 500 rpm
10 500 rpm 9000/8500 rpm 7000 rpm 6000 rpm 4500 rpm 3000 rpm
最大角加速度
50 000 rad/s2 27 000 rad/s2/48 000 rad/s2
20 000 rad/s2 9000 rad/s2 6000 rad/s2/9000 rad/s2
4900 rad/s2/7000 rad/s2
3300 rad/s2/4400 rad/s2
1900 rad/s2 820 rad/s2/1800 rad/s2
560 rad/s2/1300 rad/s2
570 rad/s2/960 rad/s2
转动惯量 0.15·10–3 kgm2 0.32/0.24·10–3 kgm2 0.63·10–3 kgm2 1.5·10–3 kgm2 2.6/2.1·10–3 kgm2 4.4/3.4·10–3 kgm2 7.4/6.3·10–3 kgm2 16·10–3 kgm2 37/23·10–3 kgm2 76/42·10–3 kgm2 240/150·10–3 kgm2
允许的轴向跳动 ±1.25 mm
重量 0.21 kg 0.35/0.22 kg 0.44 kg 0.69 kg 0.89/0.65 kg 1.0/0.72 kg 1.2/0.99 kg 1.8 kg 3.0/1.6 kg 3.5/1.7 kg 5.4/3.2 kg
栅鼓 TTR ERM 2400 栅距 400 µm
测量基准热膨胀系数
栅鼓Þtherm 10·10–6 K–1
信号周期数 512 600 720 900 1024 1200 1400 1696 2048 2600 3600 3850 4800
栅鼓内径* 40 mm 40 mm/55 mm 55 mm 70 mm 80 mm/95 mm 105 mm/120 mm 130 mm/140 mm 160 mm 180 mm/220 mm 260 mm/295 mm 380 mm/410 mm 450 mm 512 mm
栅鼓外径* 64.37 mm 75.44 mm 90.53 mm 113.16 mm 128.75 mm 150.88 mm 176.03 mm 213.24 mm 257.50 mm 326.90 mm 452.64 mm 484.07 mm 603.52 mm
磁栅精度 ±13" ±11" ±10" ±8" ±7" ±6/8" ±5.5/7" ±4.5" ±4/5" ±3.5/4" ±3/3.5" ±3.5" ±3"
单信号周期细分误差 ±18" ±15.5" ±13" ±10.5" ±9" ±8" ±6.5" ±5.5" ±4.5" ±3.5" ±3" ±2.5" ±2"
参考点 一个或距离编码
机械允许转速 22 000 rpm 19 000/ 18 000 rpm
18 500 rpm 14 500 rpm 13 000/ 12 500 rpm
10 500 rpm 9000/8500 rpm 7000 rpm 6000 rpm 4500 rpm 3000 rpm 3000 rpm 1600 rpm
最大角加速度
50 000 rad/s2 27 000 rad/s2/48 000 rad/s2
20 000 rad/s2 9000 rad/s2 6000 rad/s2/9000 rad/s2
4900 rad/s2/7000 rad/s2
3300 rad/s2/4400 rad/s2
1900 rad/s2 820 rad/s2/1800 rad/s2
560 rad/s2/1300 rad/s2
570 rad/s2/960 rad/s2
470 rad/s2 230 rad/s2
转动惯量 0.15·10–3
kgm20.32/0.24·10–3
kgm20.63·10–3
kgm21.5·10–3 kgm2 2.6/2.1·10–3
kgm24.4/3.4·10–3 kgm2 7.4/6.3·10–3
kgm216·10–3 kgm2 37/23·10–3 kgm2 76/42·10–3 kgm2 235/151·10–3
kgm2153·10–3 kgm2 713·10–3 kgm2
允许的轴向跳动 ±1.25 mm
重量 0.21 kg 0.35/0.22 kg 0.44 kg 0.69 kg 0.89/0.65 kg 1.0/0.72 kg 1.2/0.99 kg 1.8 kg 3.0/1.6 kg 3.5/1.7 kg 5.4/3.2 kg 2.8 kg 9.1 kg
* 请订购时选择

29
栅鼓 TTR ERM 2200 栅距 200 µm
测量基准热膨胀系数
钢光栅鼓Þtherm 10·10–6 K–1
信号周期数 1024 1200 1440 1800 2048 2400 2800 3392 4096 5200 7200
栅鼓内径* 40 mm 40 mm/55 mm 55 mm 70 mm 80 mm/95 mm 105 mm/120 mm 130 mm/140 mm 160 mm 180 mm/220 mm 260 mm/295 mm 380 mm/410 mm
栅鼓外径* 64.37 mm 75.44 mm 90.53 mm 113.16 mm 128.75 mm 150.88 mm 176.03 mm 213.24 mm 257.50 mm 326.90 mm 452.64 mm
磁栅精度 ±12" ±10" ±8.5" ±7" ±6" ±5.5/7" ±5/6" ±4" ±3.5/4.5" ±3/4" ±2.5/3.5"
单信号周期细分误差 ±9" ±8" ±6.5" ±5.5" ±4.5" ±4" ±4" ±3" ±2.5" ±2" ±1.5"
参考点 一个或距离编码
机械允许转速 22 000 rpm 19 000/ 18 000 rpm
18 500 rpm 14 500 rpm 13 000/ 12 500 rpm
10 500 rpm 9000/8500 rpm 7000 rpm 6000 rpm 4500 rpm 3000 rpm
最大角加速度
50 000 rad/s2 27 000 rad/s2/48 000 rad/s2
20 000 rad/s2 9000 rad/s2 6000 rad/s2/9000 rad/s2
4900 rad/s2/7000 rad/s2
3300 rad/s2/4400 rad/s2
1900 rad/s2 820 rad/s2/1800 rad/s2
560 rad/s2/1300 rad/s2
570 rad/s2/960 rad/s2
转动惯量 0.15·10–3 kgm2 0.32/0.24·10–3 kgm2 0.63·10–3 kgm2 1.5·10–3 kgm2 2.6/2.1·10–3 kgm2 4.4/3.4·10–3 kgm2 7.4/6.3·10–3 kgm2 16·10–3 kgm2 37/23·10–3 kgm2 76/42·10–3 kgm2 240/150·10–3 kgm2
允许的轴向跳动 ±1.25 mm
重量 0.21 kg 0.35/0.22 kg 0.44 kg 0.69 kg 0.89/0.65 kg 1.0/0.72 kg 1.2/0.99 kg 1.8 kg 3.0/1.6 kg 3.5/1.7 kg 5.4/3.2 kg
栅鼓 TTR ERM 2400 栅距 400 µm
测量基准热膨胀系数
栅鼓Þtherm 10·10–6 K–1
信号周期数 512 600 720 900 1024 1200 1400 1696 2048 2600 3600 3850 4800
栅鼓内径* 40 mm 40 mm/55 mm 55 mm 70 mm 80 mm/95 mm 105 mm/120 mm 130 mm/140 mm 160 mm 180 mm/220 mm 260 mm/295 mm 380 mm/410 mm 450 mm 512 mm
栅鼓外径* 64.37 mm 75.44 mm 90.53 mm 113.16 mm 128.75 mm 150.88 mm 176.03 mm 213.24 mm 257.50 mm 326.90 mm 452.64 mm 484.07 mm 603.52 mm
磁栅精度 ±13" ±11" ±10" ±8" ±7" ±6/8" ±5.5/7" ±4.5" ±4/5" ±3.5/4" ±3/3.5" ±3.5" ±3"
单信号周期细分误差 ±18" ±15.5" ±13" ±10.5" ±9" ±8" ±6.5" ±5.5" ±4.5" ±3.5" ±3" ±2.5" ±2"
参考点 一个或距离编码
机械允许转速 22 000 rpm 19 000/ 18 000 rpm
18 500 rpm 14 500 rpm 13 000/ 12 500 rpm
10 500 rpm 9000/8500 rpm 7000 rpm 6000 rpm 4500 rpm 3000 rpm 3000 rpm 1600 rpm
最大角加速度
50 000 rad/s2 27 000 rad/s2/48 000 rad/s2
20 000 rad/s2 9000 rad/s2 6000 rad/s2/9000 rad/s2
4900 rad/s2/7000 rad/s2
3300 rad/s2/4400 rad/s2
1900 rad/s2 820 rad/s2/1800 rad/s2
560 rad/s2/1300 rad/s2
570 rad/s2/960 rad/s2
470 rad/s2 230 rad/s2
转动惯量 0.15·10–3
kgm20.32/0.24·10–3
kgm20.63·10–3
kgm21.5·10–3 kgm2 2.6/2.1·10–3
kgm24.4/3.4·10–3 kgm2 7.4/6.3·10–3
kgm216·10–3 kgm2 37/23·10–3 kgm2 76/42·10–3 kgm2 235/151·10–3
kgm2153·10–3 kgm2 713·10–3 kgm2
允许的轴向跳动 ±1.25 mm
重量 0.21 kg 0.35/0.22 kg 0.44 kg 0.69 kg 0.89/0.65 kg 1.0/0.72 kg 1.2/0.99 kg 1.8 kg 3.0/1.6 kg 3.5/1.7 kg 5.4/3.2 kg 2.8 kg 9.1 kg
* 请订购时选择

30
栅鼓 TTR ERM 2404 栅距 400 µm
测量基准热膨胀系数
钢光栅鼓Þtherm 10·10–6 K–1
信号周期数 360 400 512 600 900 1024
栅鼓内径* 30 mm 30 mm 40 mm/55 mm 55 mm/60 mm 80 mm 100 mm
栅鼓外径* 45.26 mm 50.29 mm 64.37 mm 75.44 mm 113.16 mm 128.75 mm
磁栅精度 ±24" ±21" ±17" ±14" ±10" ±9"
单信号周期细分误差 ±25.5" ±23" ±18" ±15.5" ±10.5" ±9"
参考点 一个
机械允许转速 60 000 rpm 54 000 rpm 42 000 rpm 38 000 rpm
36 000 rpm 30 000 rpm
22 000 rpm 20 000 rpm
转动惯量 0.027·10-3 kgm2
0.045·10-3 kgm2
0.12/0.06·10–3 kgm2
0.19/0.16·10–3 kgm2
1.0·10-3 kgm2
1.4·10-3 kgm2
允许的轴向跳动 ±0.5 mm
重量 0.07 kg 0.10 kg 0.16 kg/0.07 kg
0.17 kg/0.13 kg
0.42 kg 0.42 kg
栅鼓 TTR ERM 2904 栅距 1000 µm
测量基准热膨胀系数
钢光栅鼓Þtherm 10·10–6 K–1
信号周期数 180 192 256 300 400
栅鼓内径* 35 mm 40 mm 55 mm 60 mm 100 mm
栅鼓外径* 54.43 mm 58.06 mm 77.41 mm 90.72 mm 120.96 mm
磁栅精度 ±72" ±68" ±51" ±44" ±33"
单信号周期细分误差 ±72" ±68" ±51" ±44" ±33"
参考点 一个
机械允许转速 50 000 rpm 47 000 rpm 35 000 rpm 29 000 rpm 16 000 rpm
转动惯量 0.06·10-3 kgm2 0.07·10-3 kgm2 0.22·10-3 kgm2 0.45·10-3 kgm2 0.93·10-3 kgm2
允许的轴向跳动 ±0.5 mm
重量 0.11 kg 0.11 kg 0.19 kg 0.30 kg 0.30 kg
* 请订购时选择

31
栅鼓 TTR ERM 2405 栅距 400 µm
测量基准热膨胀系数
钢光栅鼓Þtherm 10·10–6 K–1
信号周期数 512 600
栅鼓内径* 40 mm 55 mm
栅鼓外径* 64.37 mm 75.44 mm
磁栅精度 ±17" ±14"
单信号周期细分误差 ±18" ±15.5"
参考点 一个
机械允许转速 33 000 rpm 27 000 rpm
转动惯量 0.11·10-3 kgm2 0.16·10-3 kgm2
允许的轴向跳动 ±0.5 mm
重量 0.15 kg 0.14 kg
* 请订购时选择

T
¬W
1 / ¬
W2
d
AK ERM 2280
AK ERM 2420/2480
AK ERM 2410
H
17 mm
17 mm
19.5 mm
T
0.02 mm
0.04 mm
0.04 mm
0.05 mm
0.15 mm
0.15 mm
TTR ERM 2400
HEIDENHAIN
H
i
32
ERM 2200/2400尺寸
W1 = 无机械故障防护W2 = 带机械故障防护i, = 允许的读数头安装方式
A = 配合轴轴承1 = 轴配合;确保全表面接触2 = 配合轴的轴向公差3 = 参考点位置4 = 电缆支撑5 = 定心环6 = 位置值增加的旋转方向
读数头 安装间隙d(带间隔片)

¬
HEIDENHAIN
HEIDENHAIN
HEIDENHAIN
ISO 7092−4−200HV
ISO 4762−M4−8.8
T
T
¬W
1 / ¬
W2
d
AK ERM 2280
AK ERM 2420/2480
AK ERM 2410
H
17 mm
17 mm
19.5 mm
T
0.02 mm
0.04 mm
0.04 mm
0.05 mm
0.15 mm
0.15 mm
TTR ERM 2400
HEIDENHAIN
H
i
W1 = ohne mechanischen FehlerausschlussW2 = mit mechanischem Fehlerausschlussi, = Montage-Möglichkeit für Abtastkopf
A = Lagerung Kundenwelle1 = Wellenpassung ganzflächige Kontaktfläche beachten2 = Axialtoleranz Kundenwelle3 = Referenzmarkenlage4 = Kabelabstützung5 = Zentrierbund6 = Drehrichtung der Welle für steigende Positionswerte
Montageabstand d(mit Abstandsfolie)
Abtastkopf
33
更多信息:
有关CAD数据,请访问cad.heidenhain.com.cn
右侧相切
左侧相切
轴向
输出电缆
D1 W1 W2 D2 D3 E G
TTR ERM 2200TTR ERM 2400
¬ 40 +0/–0.007 ¬ 40 +0.009/+0.002 ¬ 40 +0.010/+0.003 ¬ 50 ¬ 64.37 37.9 6x M6
¬ 40 +0/–0.007 ¬ 40 +0.009/+0.002 ¬ 40 +0.010/+0.003 ¬ 50 ¬ 75.44 43.4 6x M6
¬ 55 +0/–0.008 ¬ 55 +0.010/+0.002 ¬ 55 +0.015/+0.007 ¬ 65 ¬ 75.44 43.4 6x M6
¬ 55 +0/–0.008 ¬ 55 +0.010/+0.002 ¬ 55 +0.015/+0.007 ¬ 70 ¬ 90.53 51.0 6x M6
¬ 70 +0/–0.008 ¬ 70 +0.010/+0.002 ¬ 70 +0.019/+0.011 ¬ 85 ¬ 113.16 62.3 6x M6
¬ 80 +0/–0.008 ¬ 80 +0.010/+0.002 ¬ 80 +0.022/+0.014 ¬ 95 ¬ 128.00 70.1 6x M6
¬ 95 +0/-0.010 ¬ 95 +0.013/+0.003 ¬ 95 +0.029/+0.019 ¬ 110 ¬ 128.75 70.1 6x M6
¬ 105 +0/-0.010 ¬ 105 +0.013/+0.003 ¬ 105 +0.031/+0.021 ¬ 120 ¬ 150.88 81.2 6x M6
¬ 120 +0/-0.010 ¬ 120 +0.013/+0.003 ¬ 120 +0.036/+0.026 ¬ 135 ¬ 150.88 81.2 6x M6
¬ 130 +0/-0.012 ¬ 120 +0.015/+0.003 ¬ 130 +0.041/+0.029 ¬ 145 ¬ 176.03 93.7 6x M6
¬ 140 +0/-0.012 ¬ 140 +0.015/+0.003 ¬ 140 +0.044/+0.032 ¬ 155 ¬ 176.03 93.7 6x M6
¬ 160 +0/-0.012 ¬ 160 +0.015/+0.003 ¬ 160 +0.049/+0.037 ¬ 175 ¬ 213.24 112.3 6x M6
¬ 180 +0/-0.012 ¬ 180 +0.015/+0.003 ¬ 180 +0.055/+0.043 ¬ 195 ¬ 257.50 134.5 6x M6
¬ 220 +0/-0.014 ¬ 220 +0.018/+0.004 ¬ 220 +0.069/+0.055 ¬ 235 ¬ 257.50 134.5 6x M6
¬ 260 +0/-0.016 ¬ 260 +0.020/+0.004 ¬ 260 +0.082/+0.066 ¬ 275 ¬ 326.90 169.2 6x M6
¬ 295 +0/-0.016 ¬ 295 +0.020/+0.004 ¬ 295 +0.093/+0.077 ¬ 310 ¬ 326.90 169.2 6x M6
¬ 380 +0/-0.018 ¬ 380 +0.022/+0.005 ¬ 380 +0.119/+0.101 ¬ 395 ¬ 452.64 232.0 12x M6
¬ 410 +0/-0.020 ¬ 410 +0.025/+0.005 ¬ 410 +0.130/+0.110 ¬ 425 ¬ 452.64 232.0 12x M6
¬ 450 +0/-0.020 ¬ 450 +0.025/+0.005 ¬ 450 +0.142/+0.122 ¬ 465 ¬ 484.07 247.7 12x M6
¬ 512 +0/-0.022 ¬ 512 +0.027/+0.005 ¬ 512 +0.161/+0.139 ¬ 528 ¬ 603.52 307.5 12x M6

TTR ERM 2404TTR ERM 2904
TTR ERM 2405
1
d
2
3
45
AK ERM 2480
AK ERM 2980
0.15 mm
0.30 mm
TTR ERM 2404
HEIDENHA
IN
TTR ERM 2404
HEIDENHA
IN
TTR ERM 2405
HEIDENHA
IN
34
ERM 2404/2405/2904尺寸
A = 轴承1 = 参考点标记,相对参考点的位置公差±5°2 = 位置值增加的旋转方向3 = 定心环 4 = 夹紧部位(适用于两端) 5 = 导向键的键槽4 x 4 x 10(DIN 6885 A型)
读数头 安装间隙d(带间隔片)

AK ERM 2480
¬
HEIDENHAIN
HEIDENHAIN
HEIDENHAIN
35
更多信息:
有关CAD数据,请访问cad.heidenhain.com.cn
D1 W1 D2 E
TTR ERM 2404TTR ERM 2405
¬ 30 +0.010/+0.002 ¬ 30 +0/–0.006 ¬ 45.26 28.3
¬ 30 +0.010/+0.002 ¬ 30 +0/–0.006 ¬ 50.29 30.9
¬ 40 +0.010/+0.002 ¬ 40 +0/–0.006 ¬ 64.37 37.9
¬ 55 +0.010/+0.002 ¬ 55 +0/–0.006 ¬ 64.37 37.9
¬ 55 +0.010/+0.002 ¬ 55 +0/–0.006 ¬ 75.44 43.4
¬ 60 +0.010/+0.002 ¬ 60 +0/–0.006 ¬ 75.44 43.4
¬ 80 +0.010/+0.002 ¬ 80 +0/–0.006 ¬ 113.16 62.3
¬ 100 +0.010/+0.002 ¬ 100 +0/–0.006 ¬ 128.75 70.0
TTR ERM 2904 ¬ 35 +0.010/+0.002 ¬ 35 +0/–0.006 ¬ 54.43 32.9
¬ 40 +0.010/+0.002 ¬ 40 +0/–0.006 ¬ 58.06 34.7
¬ 55 +0.010/+0.002 ¬ 55 +0/–0.006 ¬ 77.41 44.4
¬ 60 +0.010/+0.002 ¬ 60 +0/–0.006 ¬ 90.72 51.1
¬ 100 +0.010/+0.002 ¬ 100 +0/–0.006 ¬ 120.96 66.2
右侧相切
左侧相切
轴向
输出电缆

36
接口 » 1 VPP增量信号
针脚编号12针M23连接器 12针M23接头
15针D-sub接头连接海德汉数控系统和IK 220
15针D-sub接头连接编码器或IK 215
电源 增量信号 其它信号
12 2 10 11 5 6 8 1 3 4 9 7 /
1 9 2 11 3 4 6 7 10 12 5/8/13/15 14 /
4 12 2 10 1 9 3 11 14 7 5/6/8/15 13 /
UP 传感器UP
0 V 传感器0 V
A+ A– B+ B– R+ R– 空 空 空
棕色/ 绿色
蓝色 白色/ 绿色
白色 棕色 绿色 灰色 粉色 红色 黑色 / 紫色 黄色
电缆屏蔽层连接外壳;UP = 电源电压传感器:传感线在编码器内连接相应的电源线。禁止使用空针脚或空线!
信号周期360°电子角
(额定值)
A、B、R测量值为示波器用差分测量的结果
» 1 VPP输出信号的海德汉编码器的电压信号支持高倍频细分。
正弦增量信号A与B之间的相位差为90°电子角,典型幅值为1 VPP。图示的输出信号顺序-信号B滞后A-适用于图示运动方向。
参考点信号R明确地代表增量信号。输出信号可能略低于参考点信号。
其它信号波形 更多信息:
有关所有可用接口的全面说明和一般电气信息,参见海德汉编码器接口样本。

37
增量信号« TTL
« TTL输出信号的海德汉编码器自带正弦扫描信号的数字化电子电路,分为带和不带细分电路两大类。
增量信号以相位差为90º电子角的系列方波脉冲信号Ua1和Ua2进行传输。参考点信号包括一个或多个参考脉冲Ua0,它由增量信号触发。此外,内置电子电路还生成其反相信号¢,£和¤,实现无噪声信号传输。图示的输出信号顺序-信号Ua2滞后Ua1-适用于图示运动方向。
故障检测信号¥代表故障状态,如电源断线或光源失效等。
增量信号Ua1和Ua2的两个相邻沿间的距离通过1倍频、2倍频或4倍频处理后得到一个测量步距。
信号周期360º电子角
反相信号¢,£,¤未图示
针脚编号12针M23连接器 12针M23接头
15针D-sub接头连接海德汉数控系统和IK 220
15针D-sub接头连接编码器或PWM 21
电源 增量信号 其它信号
12 2 10 11 5 6 8 1 3 4 7 / 9
1 9 2 11 3 4 6 7 10 12 14 8/13/15 5
4 12 2 10 1 9 3 11 14 7 13 5/6/8 15
UP 传感器UP
0 V 传感器0 V
Ua1 ¢ Ua2 £ Ua0 ¤ ¥ 空 空
棕色/ 绿色
蓝色 白色/ 绿色
白色 棕色 绿色 灰色 粉色 红色 黑色 紫色 / 黄色
电缆屏蔽层连接外壳;UP = 电源电压传感器:传感线在编码器内连接相应的电源线。禁止使用空针脚或空线!
故障
4倍频处理后的测量步距
更多信息:
有关所有可用接口的全面说明和一般电气信息,参见海德汉编码器接口样本。
38
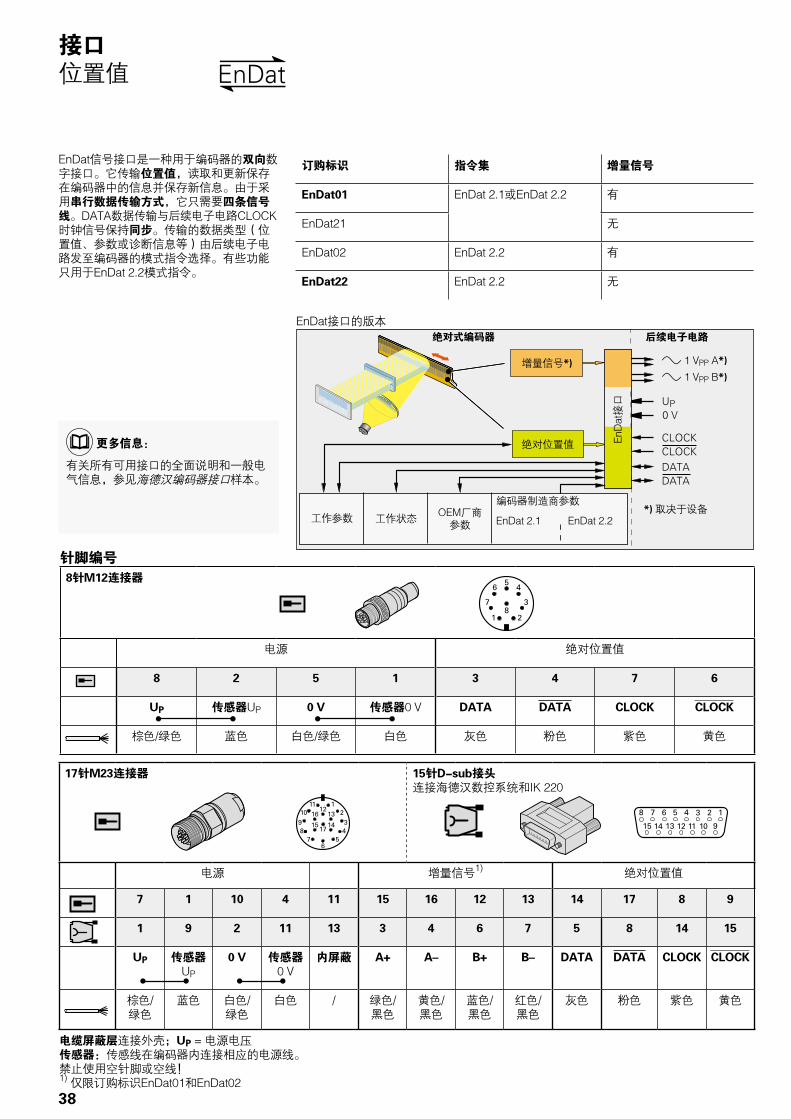
17针M23连接器 15针D-sub接头连接海德汉数控系统和IK 220
电源 增量信号1) 绝对位置值
7 1 10 4 11 15 16 12 13 14 17 8 9
1 9 2 11 13 3 4 6 7 5 8 14 15
UP 传感器UP
0 V 传感器0 V
内屏蔽 A+ A– B+ B– DATA DATA CLOCK CLOCK
棕色/ 绿色
蓝色 白色/ 绿色
白色 / 绿色/ 黑色
黄色/ 黑色
蓝色/ 黑色
红色/ 黑色
灰色 粉色 紫色 黄色
电缆屏蔽层连接外壳;UP = 电源电压传感器:传感线在编码器内连接相应的电源线。禁止使用空针脚或空线!1) 仅限订购标识EnDat01和EnDat02
接口位置值
EnDat信号接口是一种用于编码器的双向数字接口。它传输位置值,读取和更新保存在编码器中的信息并保存新信息。由于采用串行数据传输方式,它只需要四条信号线。DATA数据传输与后续电子电路CLOCK时钟信号保持同步。传输的数据类型(位置值、参数或诊断信息等)由后续电子电路发至编码器的模式指令选择。有些功能只用于EnDat 2.2模式指令。
订购标识 指令集 增量信号
EnDat01 EnDat 2.1或EnDat 2.2 有
EnDat21 无
EnDat02 EnDat 2.2 有
EnDat22 EnDat 2.2 无
EnDat接口的版本绝对式编码器 后续电子电路
» 1 VPP A*)
» 1 VPP B*)
工作参数 工作状态OEM厂商
参数
编码器制造商参数
EnDat 2.1 EnDat 2.2*) 取决于设备
绝对位置值 EnD
at接
口
增量信号*)
更多信息:
有关所有可用接口的全面说明和一般电气信息,参见海德汉编码器接口样本。
针脚编号8针M12连接器
电源 绝对位置值
8 2 5 1 3 4 7 6
UP 传感器UP 0 V 传感器0 V DATA DATA CLOCK CLOCK
棕色/绿色 蓝色 白色/绿色 白色 灰色 粉色 紫色 黄色

B
39
M23
M12
M23
M12
接头上的针脚编号方向与连接器或 法兰座的方向相反, 包括连接元件为
针式触点或是
孔式触点。
连接件结合后的防护等级可达IP67(D-sub接头:IP50;RJ-45:IP20; EN 60529)。未连接时,无防护能力。
连接件和电缆一般信息
接头(绝缘):带锁母的连接件。 有针式或孔式触点。
图符
连接器(绝缘):外螺纹连接件。有针式或孔式触点。
图符
D-sub接头:连接海德汉数控系统、 计数卡和IK绝对值计数卡。
图符
1) 带内部细分电子电路
适配电缆
M12直角接头
最大电缆长度最大电缆长度取决于后续电子电路的供电电压、使用的电缆和接口。但是,常用的30 m总长电缆通常没有使用限制。
法兰座和M23安装式连接器的辅件
带螺纹的金属防尘盖ID 219926-01
M12连接件辅件绝缘隔套ID 596495-01

40
1 VPP连接电缆
12针M23
PUR连接电缆 6 × (2 × 0.19 mm2); AP = 0.19 mm2
PUR连接电缆 4 × (2 × 0.14 mm2) + (4 × 0.5 mm2); AP = 0.5 mm2 ¬ 8 mm ¬ 6 mm1)
全套 带接头(孔式) 和连接器(针式)
298401-xx –
全套 带接头(孔式) 和接头(针式)
298399-xx –
全套 带接头(孔式)和D-sub接头(孔式), 连接IK 220/ND 780
310199-xx –
全套 带接头(孔式)和D-sub接头(针式), 连接IK 115/IK 215/ND 280/ND 287/EIB 741
310196-xx –
带一个 接头(孔式)
309777-xx –
全套 带D-sub接头(孔式) 和M23接头(针式)
331693-xx 355215-xx
带一个 D-sub接头(孔式)
332433-xx 355209-xx
全套 带D-sub接头(孔式) 和D-sub接头(针式)
335074-xx 355186-xx
全套 带D-sub接头(孔式) 和D-sub接头(孔式)连接IK 220/ND 780
335077-xx 349687-xx
仅电缆 816317-xx 816323-xx
编码器电缆,连接ERP 880 PUR 4 × (2 × 0.05) + (4 × 0.14) mm2; AP = 0.14 mm2 ¬ 4.5 mm
带一个12针PCB接头 长度1 m 372164-01
1) ¬ 6 mm的电缆长度:最长9 mAP:电源线截面积
41
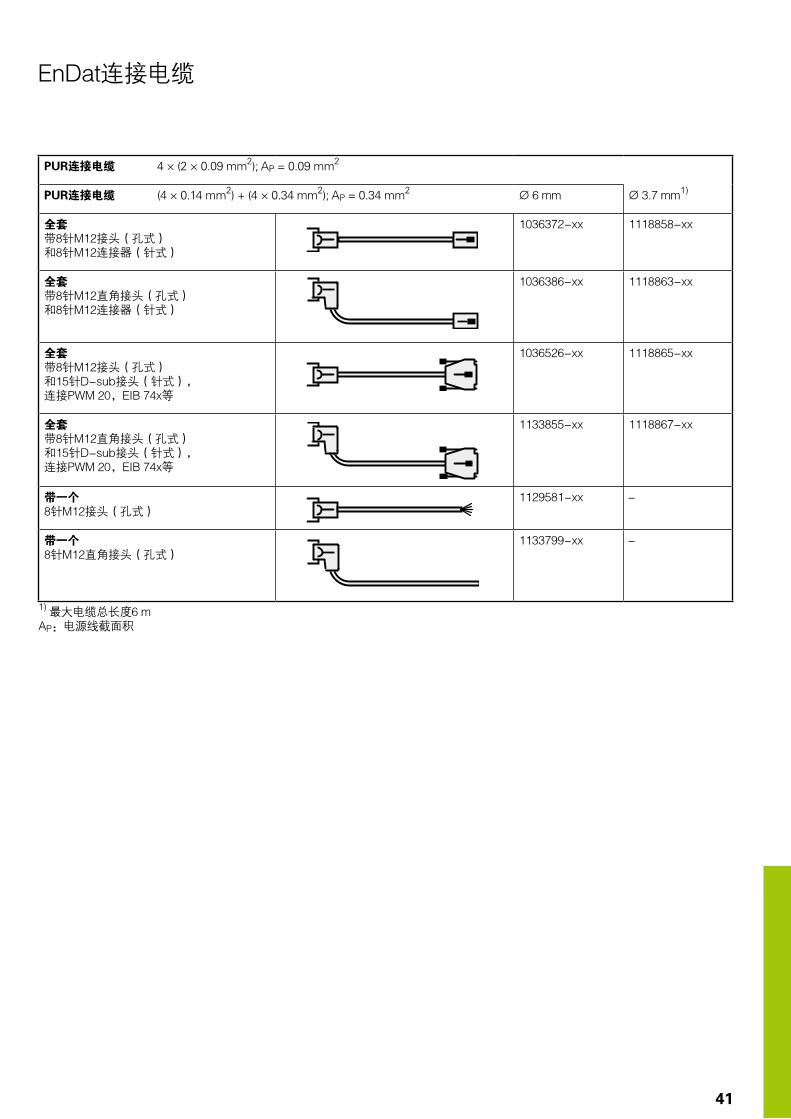
EnDat连接电缆
PUR连接电缆 4 × (2 × 0.09 mm2); AP = 0.09 mm2
PUR连接电缆 (4 × 0.14 mm2) + (4 × 0.34 mm2); AP = 0.34 mm2 ¬ 6 mm ¬ 3.7 mm1)
全套 带8针M12接头(孔式) 和8针M12连接器(针式)
1036372-xx 1118858-xx
全套 带8针M12直角接头(孔式) 和8针M12连接器(针式)
1036386-xx 1118863-xx
全套 带8针M12接头(孔式) 和15针D-sub接头(针式), 连接PWM 20,EIB 74x等
1036526-xx 1118865-xx
全套 带8针M12直角接头(孔式) 和15针D-sub接头(针式), 连接PWM 20,EIB 74x等
1133855-xx 1118867-xx
带一个 8针M12接头(孔式)
1129581-xx –
带一个 8针M12直角接头(孔式)
1133799-xx –
1) 最大电缆总长度6 mAP:电源线截面积

42
连接电缆 发那科 三菱
发那科PUR连接电缆 4 × (2 × 0.09 mm2); AP = 0.09 mm2
PUR连接电缆 (4 × 0.14 mm2) + (4 × 0.34 mm2); AP = 0.34 mm2 ¬ 6 mm ¬ 3.7 mm1)
全套带8针M12接头(孔式) 和8针M12连接器(针式)
1036372-xx 1118858-xx
全套带8针M12直角接头(孔式) 和8针M12连接器(针式)
1036386-xx 1118863-xx
全套带8针M12接头(孔式) 和发那科接头(孔式)
1130952-xx –
带1个8针M12接头(孔式)
1129581-xx –
带1个带8针M12直角接头(孔式)
1133799-xx –
1) 最大电缆总长度6 m AP:电源线截面积
三菱PUR连接电缆 (4 × 0.14 mm2) + (4 × 0.34 mm2); AP = 0.34 mm2 ¬ 6 mm ¬ 3.7 mm1)
全套带8针M12接头(孔式) 和8针M12连接器(针式)
1036372-xx 1118858-xx
全套带8针M12直角接头(孔式) 和8针M12连接器(针式)
1036386-xx 1118863-xx
全套带8针M12接头(孔式)和20针三菱接头
1132594-xx –
全套带8针M12接头(孔式)和10针三菱接头
1132621-xx –
带1个8针M12接头(孔式)
1129581-xx –
带1个带8针M12直角接头(孔式)
1133799-xx –
1) 最大电缆总长度6 m AP:电源线截面积
三菱20芯
三菱10芯

43
松下连接电缆
松下PUR连接电缆 4 × (2 × 0.09 mm2); AP = 0.09 mm2
PUR连接电缆 (4 × 0.14 mm2) + (4 × 0.34 mm2); AP = 0.34 mm2 ¬ 6 mm ¬ 3.7 mm1)
全套带8针M12接头(孔式) 和8针M12连接器(针式)
1036372-xx 1118858-xx
全套带8针M12直角接头(孔式) 和8针M12连接器(针式)
1036386-xx 1118863-xx
全套带8针M12接头(孔式) 和发那科接头(孔式)
1160268-xx –
带1个8针M12接头(孔式)
1129581-xx –
带1个带8针M12直角接头(孔式)
1133799-xx –
1) 最大电缆总长度6 mAP:电源线截面积

44
12针M23
连接电缆与编码器连接件连接的配合件 接头(孔式) 电缆 ¬ 8 mm 291697-05
接头 连接后续电子电路
接头(针式) 电缆 ¬ 8 mm ¬ 6 mm
291697-08291697-07
编码器电缆或连接电缆的连接器 连接器(针式) 电缆 ¬ 3.7 mm ¬ 4.5 mm ¬ 6 mm ¬ 8 mm
291698-14291698-14291698-03291698-04
法兰座 安装在后续电子电路上
法兰座(孔式) 315892-08
安装式连接器 带法兰(孔式) ¬ 6 mm ¬ 8 mm
291698-17291698-07
带法兰(针式) ¬ 6 mm ¬ 8 mm
291698-08291698-31
带中心固定(针式) ¬ 6 mm 至10 mm
741045-01
适配器» 1 VPP/11 µAPP用于将1 VPP信号转换成11 µAPP; 12针M23接头(孔式) 和9针M23接头(针式)
364914-01
连接件

45
诊断和测试设备
在海德汉数控系统的控制环中进行诊断,显示有效数据或模拟编码器信号
用PWM 21和ATS软件诊断
用PWM 21和ATS软件调试
海德汉编码器提供调试、监测和诊断所需的全部信息。提供的信息类型取决于增量式或绝对式编码器以及所用的接口。
增量式编码器主要使用1 VPP、TTL或HTL接口信号。TTL和HTL信号的编码器在内部监测其信号幅值并生成简单的故障检测信号。对于1 VPP信号,只能用外部测试设备或在后续电子电路(模拟诊断接口)中通过计算分析输出信号。
绝对式编码器用串行方式传输数据。根据接口类型,可输出1 VPP的附加增量信号。这些信号在编码器内进行全面监测。监测结果(特别是有效数据)与位置值一起通过串行接口发给后续电子电路(数字诊断接口)。提供以下信息: • 出错信息:位置值不可靠 • 警告:已达到编码器内部功能极限 • 有效数据:
– 有关编码器功能性保护区的详细信息 – 所有海德汉编码器统一标度 – 可周期性输出
因此,后续电子电路能够评估编码器的当前状态,即使在闭环模式中也很容易。
为分析编码器,海德汉提供相应PWM检测设备和PWT测试设备。根据设备安装方式的不同有两类诊断方式: • 编码器诊断:编码器直接连接测试或检测设备。可以全面分析编码器功能。
• 在控制环中诊断:PWM相位测量仪接入闭环控制系统中(例如通过适当的测试适配接头)。因此能在工作中实时诊断机床或系统。其功能与接口有关。
46
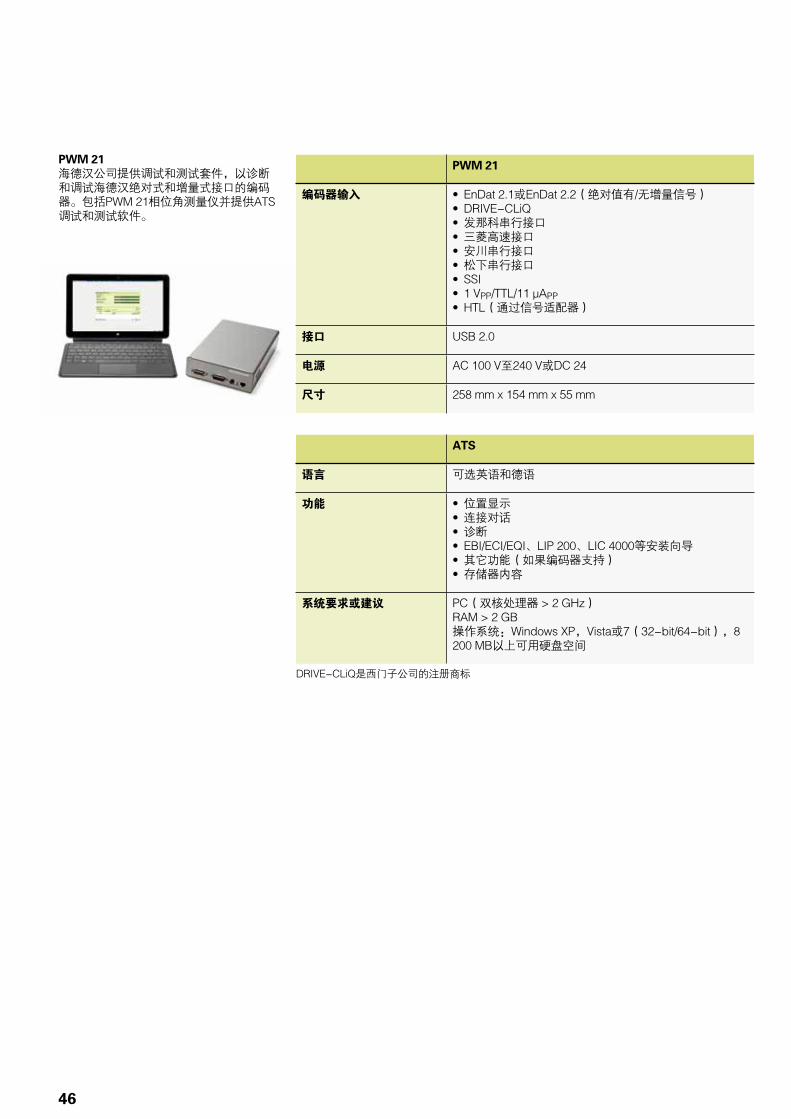
PWM 21海德汉公司提供调试和测试套件,以诊断和调试海德汉绝对式和增量式接口的编码器。包括PWM 21相位角测量仪并提供ATS调试和测试软件。
PWM 21
编码器输入 • EnDat 2.1或EnDat 2.2(绝对值有/无增量信号) • DRIVE-CLiQ • 发那科串行接口 • 三菱高速接口 • 安川串行接口 • 松下串行接口 • SSI • 1 VPP/TTL/11 µAPP • HTL(通过信号适配器)
接口 USB 2.0
电源 AC 100 V至240 V或DC 24
尺寸 258 mm x 154 mm x 55 mm
ATS
语言 可选英语和德语
功能 • 位置显示 • 连接对话 • 诊断 • EBI/ECI/EQI、LIP 200、LIC 4000等安装向导 • 其它功能(如果编码器支持) • 存储器内容
系统要求或建议 PC(双核处理器 > 2 GHz)RAM > 2 GB操作系统:Windows XP,Vista或7(32-bit/64-bit),8 200 MB以上可用硬盘空间
DRIVE-CLiQ是西门子公司的注册商标

47
PWT 100PWT 100是检测设备,用于检查和调试海德汉增量式及绝对式编码器的功能。PWT 100结构紧凑,设计坚固,适用于便携式应用。
PWT 100
编码器输入仅限海德汉编码器
• EnDat • 发那科串行接口 • 三菱高速接口 • 松下串行接口 • 安川串行接口 • 1 VPP • 11 µAPP • TTL
显示屏 4.3"彩色纯平显示器(触摸屏)
电源 DC 24 V功率消耗:最大15 W
工作温度 0 °C至40 °C
防护等级EN 60529 IP20
尺寸 ≈ 145 mm x 85 mm x 35 mm
APE 381
编码器输入 » 1 VPP(信号连接)
设计 带D-Sub接头的电缆
功能 关闭读数头内的信号误差补偿
电源 通过后续电子电路
APE 381接口电子电路用于将PWM/PWT连接至有信号误差补偿功能的编码器。APE 381可关闭读数头内的信号误差补偿功能,使编码器内输出的无补偿的1 VPP信号可被处理。

48
接口电子电路
海德汉公司的接口电子电路将编码器信号调整为可连接后续电子电路接口的信号。用于后续电子电路不能直接处理海德汉编码器的输出信号或另外需要细分信号时。
盒式接口电子电路的输入信号海德汉公司的接口电子电路用于连接1 VPP(电压信号)或11 µAPP(电流信号)正弦信号的编码器。串行接口EnDat或SSI的编码器也能连接多种接口电子电路。
接口电子电路输出信号接口电子电路支持以下后续电子电路: • TTL系列方波脉冲 • EnDat 2.2 • DRIVE-CLiQ • 发那科串行接口 • 三菱高速接口 • 安川串行接口 • PROFIBUS
正弦输入信号的细分除信号转换外,正弦编码器信号还能在接口电子电路中进行细分。因此可以细分测量步距并得到更高控制质量和更优定位特性。
位置值的形成有些接口电子电路还内置计数功能。从最后设置的参考点开始,在移过参考点时生成绝对位置值,并输出给后续电子电路。
集成板卡
顶盖安装轨
接头式

49
输出 输入 结构 – 防护等级 插补1)或细分 型号
接口 数量 接口 数量
« TTL 1 » 1 VPP 1 盒式 – IP65 5/10倍 IBV 101
20/25/50/100倍 IBV 102
无细分 IBV 600
25/50/100/200/400倍 IBV 660 B
插头式 – IP40 5/10/20/25/50/100倍 APE 371
集成板卡 – IP00 5/10倍 IDP 181
20/25/50/100倍 IDP 182
» 11 µAPP 1 盒式 – IP65 5/10倍 EXE 101
20/25/50/100倍 EXE 102
无细分功能/5倍 EXE 602 E
25/50/100/200/400倍 EXE 660 B
集成板卡 – IP00 5倍 IDP 101
« TTL/ » 1 VPP可调
2 » 1 VPP 1 盒式 – IP65 2倍 IBV 6072
5/10倍 IBV 6172
5/10倍和20/25/50/100倍 IBV 6272
EnDat 2.2 1 » 1 VPP 1 盒式 – IP65 16 384倍细分 EIB 192
插头式 – IP40 16 384倍细分 EIB 392
2 盒式 – IP65 16 384倍细分 EIB 1512
DRIVE-CLiQ 1 EnDat 2.23) 1 盒式 – IP65 – EIB 2391 S
发那科串行接口 1 » 1 VPP 1 盒式 – IP65 16 384倍细分 EIB 192 F
插头式 – IP40 16 384倍细分 EIB 392 F
2 盒式 – IP65 16 384倍细分 EIB 1592 F
三菱高速接口 1 » 1 VPP 1 盒式 – IP65 16 384倍细分 EIB 192 M
插头式 – IP40 16 384倍细分 EIB 392 M
2 盒式 – IP65 16 384倍细分 EIB 1592 M
安川串行接口 1 EnDat 2.22) 1 插头式 – IP40 – EIB 3391 Y
PROFIBUS DP 1 EnDat 2.1; EnDat 2.2 1 顶盖安装轨 – PROFIBUS网关
1) 可切换 2) 只有LIC 4100为5 nm测量步距,或LIC 2100为50 nm或100 nm测量步距3) 不适用于ERM 2410系列

745168-Z4·10·02/2019·H·中国印刷·样本信息如有更新,恕不另行通知,所有技术参数均以订货合同为准。 欢迎关注海德汉官方微信
公司网址:www.heidenhain.com.cn
约翰内斯·海德汉博士(中国)有限公司 地址:北京市顺义区天竺空港工业区 A 区天纬三街 6 号
邮编:101312
电话:010-80420000
传真:010-80420010
Email: [email protected]
上海分公司 地址:上海市长宁区淞虹路 207 号
明基商务广场
B 栋 1 楼 01-04 单元
邮编:200335
电话:021-23570988
传真:010-80420191 021-23570989
Email: [email protected]
海德汉有限公司 地址:香港九龙观塘开源道 49 号创贸广场 2007-2010 室
Unit 2007-2010, 20/F, Apec Plaza,
49 Hoi Yuen Road, Kwun Tong, Kowloon, Hong Kong
电话:00852-27591920
86-13632176247
传真:00852-27591961 010-80420188
Email: [email protected]
哈尔滨办事处
地址:黑龙江省哈尔滨市长江路 398 号
工大集团总部大厦 1405-1 室
邮编:150090
电话:0451-82892109
传真:010-80480536 010-80480536
Email: [email protected]
成都办事处
地址:四川省成都市人民南路一段 86 号
城市之心 19 楼 F 座
邮编:610016
电话:028-86202155
传真:010-80480534
Email: [email protected]
沈阳办事处
地址:沈阳市沈河区惠工街 10 号
卓越大厦 706 室
邮编:110013
电话:024-22812890
传真:010-80420193 024-22812892
Email: [email protected]
武汉办事处
地址:湖北省武汉市武昌区中南路 7 号
中商广场写字楼 A 座 2102 室
邮编:430071
电话:027-59805275
传真:010-80420197
Email: [email protected]
西安办事处
地址:陕西省西安市翠华路与雁南五路交汇
处曲江环球中心 9 层 A10909 号单元
邮编:710061
电话:029-87882030
传真:010-80420192
Email: [email protected]
宁波办事处
地址:浙江省宁波市江东区惊驾路 565 号
中信泰富 B 座 204 室
邮编:315040
电话:0574-27660891 27660892
传真:010-80480535
Email: [email protected]
南京办事处
地址:江苏省南京市江宁区秦淮路 4 号
同曦青春水岸 2 幢 502 室
邮编:211106
电话:025-84189639
传真:010-80420185
Email: [email protected]
深圳办事处
地址:深圳市福田区华富路 1018 号
中航中心 13 楼 02-03 单元
邮编:518031
电话:0755-33223861
传真:010-80420187
Email: [email protected]