dynamic steady-state analysis of structures under ... · uncertainty analysis dynamic steady-state...
TRANSCRIPT
Dynamic Steady-State Analysis of Structures
under Uncertain Harmonic Loads
via Semidefinite Program
Yoshihiro Kanno† Izuru Takewaki‡
†University of Tokyo (Japan)‡Kyoto University (Japan)
July 8, 2009

motivation (static analysis)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 2 / 20
■ 3DOF, 2-bar frame
■ uncertain load & stiffness
(c)
(1)
(2)
(b)
0 x
y
(a)
f∼
x0
y
f f =40000∼
200 kN
200 kN
200 kN
−200 kN
elastic modulus :
180 ≤ Ei ≤ 220 GPa
(24.0 cm2, 72.0 cm4)

motivation (static analysis)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 2 / 20
■ 3DOF, 2-bar frame [Kanno & Takewaki 06; 08]
■ uncertain load & stiffness → bound of response?
(c)
(1)
(2)
(b)
0 x
y
(a)
f∼
−3 −2.5 −2 −1.5 −1 −0.5
−7.5
−7
−6.5
−6
−5.5
u ( cm )
u y (
cm)
x
distribution of nodal displacement

motivation (static analysis)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 2 / 20
■ 3DOF, 2-bar frame
■ uncertain load & stiffness
(c)
(1)
(2)
(b)
0 x
y
(a)
f∼
−3 −2.5 −2 −1.5 −1 −0.5
−7.5
−7
−6.5
−6
−5.5
u ( cm )
u y
(cm
)
x
bounding ellipsoid

motivation (static analysis)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 2 / 20
■ 3DOF, 2-bar frame
■ uncertain load & stiffness
(c)
(1)
(2)
(b)
0 x
y
(a)
f∼
−3 −2.5 −2 −1.5 −1 −0.5
−7.5
−7
−6.5
−6
−5.5
u (cm)
uy (
cm)
x
bounding box (interval hull)

uncertainty analysis
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 3 / 20
■ stochastic model — reliability design etc.
■ non-stochastic model — unknown-but-bounded parameters
◆ convex model [Ben-Haim & Elishakoff 90]
◆ interval analysis [Alefeld & Mayer 00], [Chen et al. 02], etc.
◆ mathematical programming

uncertainty analysis
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 3 / 20
■ stochastic model — reliability design etc.
■ non-stochastic model — unknown-but-bounded parameters
◆ convex model [Ben-Haim & Elishakoff 90]
■ linear approximation
◆ interval analysis [Alefeld & Mayer 00], [Chen et al. 02], etc.
■ conservative[Neumaier & Pownuk 07] (truss)
◆ mathematical programming
■ SDP & proof of conservativeness ← ♣[Calafiore & El Ghaoui 04] (ULE)
[Kanno & Takewaki 06] (static)
■ MIP & extremal case [Guo et al. 08], [Kanno & Takewaki 07]
objective: uncertainty analysis
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 4 / 20
K ¨u + C ˙u + Ku = f (eq. of motion)
■ f = feiωt — harmonic excitation
■ consider the uncertainty of f
■ predict the distribution of u
■ do not use the 1st order approximation→ large uncertainties
■ have a proof of conservativeness

objective: uncertainty analysis
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 4 / 20
K ¨u + C ˙u + Ku = f (eq. of motion)
■ f = feiωt — harmonic excitation
■ consider the uncertainty of f
■ predict the distribution of u
■ do not use the 1st order approximation→ large uncertainties
■ have a proof of conservativeness
mathematical framework
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 5 / 20
■ robust optimization (RO)
■ semidefinite program (SDP)
■ S-lemma
■ confidence bound detection← optimization / robust optimization
mathematical framework
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 5 / 20
■ robust optimization (RO)
■ semidefinite program (SDP)
■ S-lemma
■ confidence bound detection← optimization / robust optimization

robust optimization
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 6 / 20
■ nominal (conventional) optimization
minx
{c(x) : g(x) ≥ 0}
e.g.) x: design variables

robust optimization
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 6 / 20
■ nominal (conventional) optimization
minx
{c(x) : g(x) ≥ 0}
e.g.) x: design variables
■ robust optimization [Ben-Tal & Nemirovski 98; 02]
minx
{c(x) : g(x; ζ) ≥ 0 (∀ζ : α ≥ ‖ζ‖)}
e.g.) ζ: unknown-but-bounded parameters

robust optimization
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 6 / 20
minx
{cTx : g(x; ζ) ≥ 0 (∀ζ : α ≥ ‖ζ‖)
}
feasible set
optimal solution
c
constraints
(nominal data)
nominal optimization
constraints
(nominal data)
robust optimal
solution
(nominal) optimal
solution
robust
constraints
perturbed
constraints
c
robust optimization

semidefinite program (SDP)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 7 / 20
minm∑
i=1
biyi
s.t. C −m∑
i=1
Aiyi � O
variables : y1, . . . , ym
coefficients : b1, . . . , bm,
A1, . . . , Am, C ∈ Sn n× n symmetric matrices
■ P � O (⇔ P is positive semidefinite) ← nonlinear, convex
■ primal-dual interior-point method
■ applications in eigenvalue optimization, etc.

semidefinite program (SDP)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 7 / 20
minm∑
i=1
biyi
s.t. C −m∑
i=1
Aiyi � O
variables : y1, . . . , ym
coefficients : b1, . . . , bm,
A1, . . . , Am, C ∈ Sn n× n symmetric matrices
■ P � O (⇔ P is positive semidefinite) ← nonlinear, convex
■ primal-dual interior-point method
■ applications in eigenvalue optimization, etc.

uncertainty model
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 8 / 20
(−ω2M + iωC + K
)u = f (eq. of motion)
■ f = feiωt — harmonic excitationuncertainty:
f= f j + F 0ζ, ζ ∈ Z

uncertainty model
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 8 / 20
(−ω2M + iωC + K
)u = f (eq. of motion)
■ f = feiωt — harmonic excitationuncertainty:
f= f j + F 0ζ, ζ ∈ Z
f nominal (best estimate) value
ζ unknown-but-bounded
F 0 coefficients (’magnitudes’ of uncertainties)
Z closed set

uncertainty model
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 8 / 20
(−ω2M + iωC + K
)u = f (eq. of motion)
■ f = feiωt — harmonic excitationuncertainty:
f= f j + F 0ζ, ζ ∈ Z
f1f1∼
f2∼
f10
f20
f2
Z = {ζ | 1 ≥ ‖T jζ‖2 (∀j)}
f1f1∼
f2∼
f10
f20
f2
Z = {ζ | 1 ≥ ‖ζ‖∞}
■ ‘magnitude & direction’ of amplitude of driving load are uncertain

reduction to real variables
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 9 / 20
(−ω2M + iωC + K
)u = f (eq. of motion)
■ u ∈ Cd (complex vector)
[−ω2M + K −ωC
ωC −ω2M + K
] [v1
v2
]=
[f0
]

reduction to real variables
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 9 / 20
(−ω2M + iωC + K
)u = f (eq. of motion)
■ u ∈ Cd (complex vector)
[−ω2M + K −ωC
ωC −ω2M + K
] [v1
v2
]=
[f0
]
■
[v1
v2
]=
[Re u
Im u
](: real part)(: imag. part)
is a real vector
■ for uq (displacement amplitude):
◆ |uq| (modulus) — r =√
v2
1q + v2
2q
◆ arg uq (argument) — tan θ = v2q/v1q

upper bound of modulus
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 10 / 20
maximum value of modulus (def.)
rmax = max {‖vq‖ | v solves (♠)} vq = (v1q, v2q)T
eq. of motion (w.r.t. real variables)
Sv =
[f0
], f ∈ F (♠)
■ max{‖vq‖} — nonconvex optimization
■ direct use of nonlinear programming→ no proof of conservativeness

upper bound of modulus
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 10 / 20
maximum value of modulus (def.)
rmax = max {‖vq‖ | v solves (♠)} vq = (v1q, v2q)T

upper bound of modulus
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 10 / 20
maximum value of modulus (def.)
rmax = max {‖vq‖ | v solves (♠)} vq = (v1q, v2q)T
reformulation to robust optimization
rmax = min {r | r ≥ ‖vq‖ (∀v ∈ V)} (RO)
Vq
Re uq
Im uq
rmax
r
(v )1q
(v )2q
conservative method for (RO) −→ find an upper bound of rmax
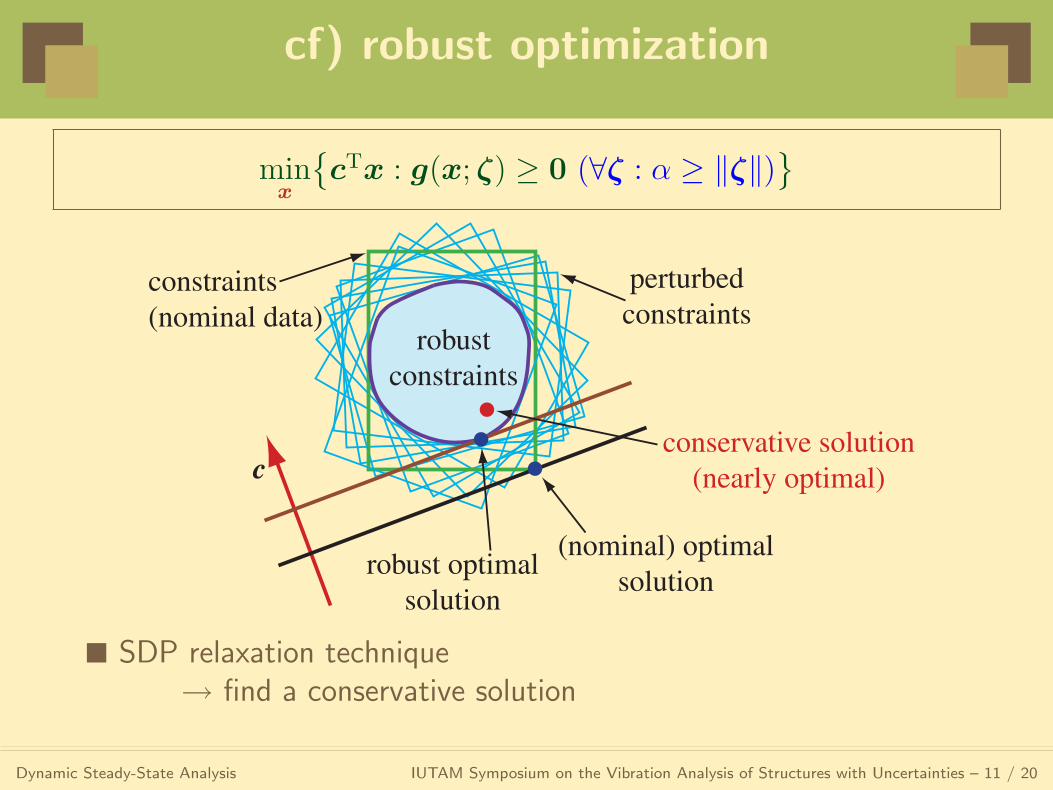
cf) robust optimization
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 11 / 20
minx
{cTx : g(x; ζ) ≥ 0 (∀ζ : α ≥ ‖ζ‖)
}
constraints
(nominal data)
robust optimal
solution
(nominal) optimal
solution
robust
constraints
perturbed
constraints
cconservative solution
(nearly optimal)
■ SDP relaxation technique→ find a conservative solution

S-lemma
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 12 / 20
f(x), g(x) : quadratic functions
(a): f(x) ≥ 0 =⇒ g(x) ≥ 0
m
(b): ∃w ≥ 0, g(x) ≥ wf(x), ∀x

S-lemma
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 12 / 20
f1(x), . . . , fm(x), g(x) : quadratic functions
(a): f1(x) ≥ 0, . . . , fm(x) ≥ 0 =⇒ g(x) ≥ 0
⇑
(b): ∃w ≥ 0, g(x) ≥m∑
i=1
wifi(x), ∀x
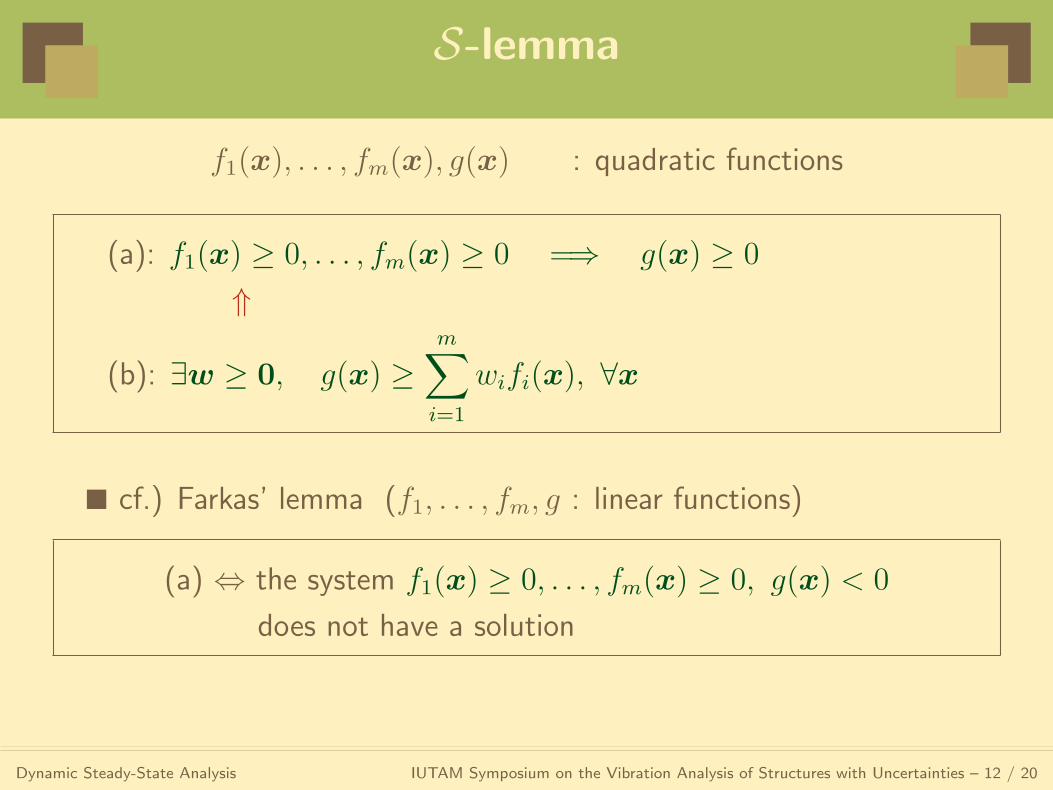
S-lemma
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 12 / 20
f1(x), . . . , fm(x), g(x) : quadratic functions
(a): f1(x) ≥ 0, . . . , fm(x) ≥ 0 =⇒ g(x) ≥ 0
⇑
(b): ∃w ≥ 0, g(x) ≥m∑
i=1
wifi(x), ∀x
■ cf.) Farkas’ lemma (f1, . . . , fm, g : linear functions)
(a) ⇔ the system f1(x) ≥ 0, . . . , fm(x) ≥ 0, g(x) < 0
does not have a solution

S-lemma
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 12 / 20
f1(x), . . . , fm(x), g(x) : quadratic functions
(a): f1(x) ≥ 0, . . . , fm(x) ≥ 0 =⇒ g(x) ≥ 0
⇑
(b): ∃w ≥ 0, g(x) ≥m∑
i=1
wifi(x), ∀x → p.s.d. constraint of SDP

S-lemma
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 12 / 20
f1(x), . . . , fm(x), g(x) : quadratic functions
(a): f1(x) ≥ 0, . . . , fm(x) ≥ 0 =⇒ g(x) ≥ 0
⇑
(b): ∃w ≥ 0, g(x) ≥m∑
i=1
wifi(x), ∀x
■ apply S-lemma to
rmax = min {r | r ≥ ‖vq‖ (∀v ∈ V)} (RO)
■ obtain an SDP providing r∗ (≥ rmax) (conservative bound)

bounds of argument
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 13 / 20
maximum value of argument (def.)
θmax = max {arctan(v1q/v2q) | v ∈ V}

bounds of argument
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 13 / 20
maximum value of argument (def.)
θmax = max {arctan(v1q/v2q) | v ∈ V}
aa v =0T
a2
−a
Vq
Re uq
Im uq
θmax1
(v )1q
(v )2q
q
[a1 a2
] [v1q
v2q
]= 0 ⇒
v1q
v2q
= −a1
a2

bounds of argument
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 13 / 20
maximum value of argument (def.)
θmax = max {arctan(v1q/v2q) | v ∈ V}
reformulation to robust optimization
−1/ tan θmax = min
{a2 |
[1 a2
] [v1q
v2q
]≥ 0 (∀v ∈ V)
}(RO)
aa v =0T
a2
−a
Vq
Re uq
Im uq
θmax1
(v )1q
(v )2q
q
conservative method for (RO) −→ find an upper bound of θmax

ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 14 / 20
■ harmonic driving load — feiωt
■ uncertainty — f = f + ζ α ≥ ‖ζ‖
■ α = 10%
(a)
x
y
(b)
(c)
f∼
(1)
(2) x0
y
f
f =10 kN∼
α kN α kN
α kN
−α kN
■ primal-dual interior-point method: SeDuMi 1.05 [Sturm 99]

ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 14 / 20
■ harmonic driving load — feiωt
■ uncertainty — f = f + ζ α ≥ ‖ζ‖
■ α = 10% ω = ω0
1: fundamental circular frequency (undamped)
(a)
x
y
(b)
(c)
f∼
(1)
(2)
−0.4 −0.2 0 0.2 0.4 0.6 0.8−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
real (cm)
imag
inar
y (c
m)
displacement amplitude ux(∈ C)

ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 14 / 20
■ harmonic driving load — feiωt
■ uncertainty — f = f + ζ α ≥ ‖ζ‖
■ α = 10% ω = ω0
1: fundamental circular frequency (undamped)
(a)
x
y
(b)
(c)
f∼
(1)
(2)
−2 −1 0 1 2
3
4
5
6
7
real (cm)
imag
inar
y (c
m)
displacement amplitude uy(∈ C)

ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 14 / 20
■ harmonic driving load — feiωt
■ uncertainty — f = f + ζ α ≥ ‖ζ‖
■ α = 10% ω = ω0
1: fundamental circular frequency (undamped)
(a)
x
y
(b)
(c)
f∼
(1)
(2)
−0.4−0.2 0 0.2 0.4 0.6 0.8−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
real (cm)
imag
inar
y (c
m)
0 100 2000.5
1
1.5
2
sample number
mod
ulus
(cm
)
0 100 200−1.5
−1.45
−1.4
−1.35
sample number
phas
e an
gle
(rad
)random samples (ux)

ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 15 / 20
■ (ω = ω0
1) variations w.r.t. α (‘magnitude’ of uncertainty)
0 0.2 0.4 0.6 0.8 1
0.8
1
1.2
1.4
1.6
1.8
2
α
mod
ulus
(cm
)
|ux|
0 0.2 0.4 0.6 0.8 1−1.5
−1.45
−1.4
−1.35
αph
ase
angl
e (r
ad)
arg ux

ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 15 / 20
■ driving load feiωt (ω = 1.1ω0
1)
−0.15 −0.1 −0.05 0 0.05 0.1−0.25
−0.2
−0.15
−0.1
−0.05
0
real (cm)
imag
inar
y (c
m)
displacement amplitude ux
0.6 0.8 1 1.2 1.4−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
real (cm)
imag
inar
y (c
m)
displacement amplitude uy

ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 15 / 20
■ (ω = 1.3ω0
1)
0.05 0.06 0.07 0.08 0.09 0.1 0.11 0.12−0.05
−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
real (cm)
imag
inar
y (c
m)
displacement amplitude ux
0.2 0.25 0.3 0.35 0.4 0.45−0.1
−0.05
0
0.05
0.1
0.15
real (cm)
imag
inar
y (c
m)
displacement amplitude uy
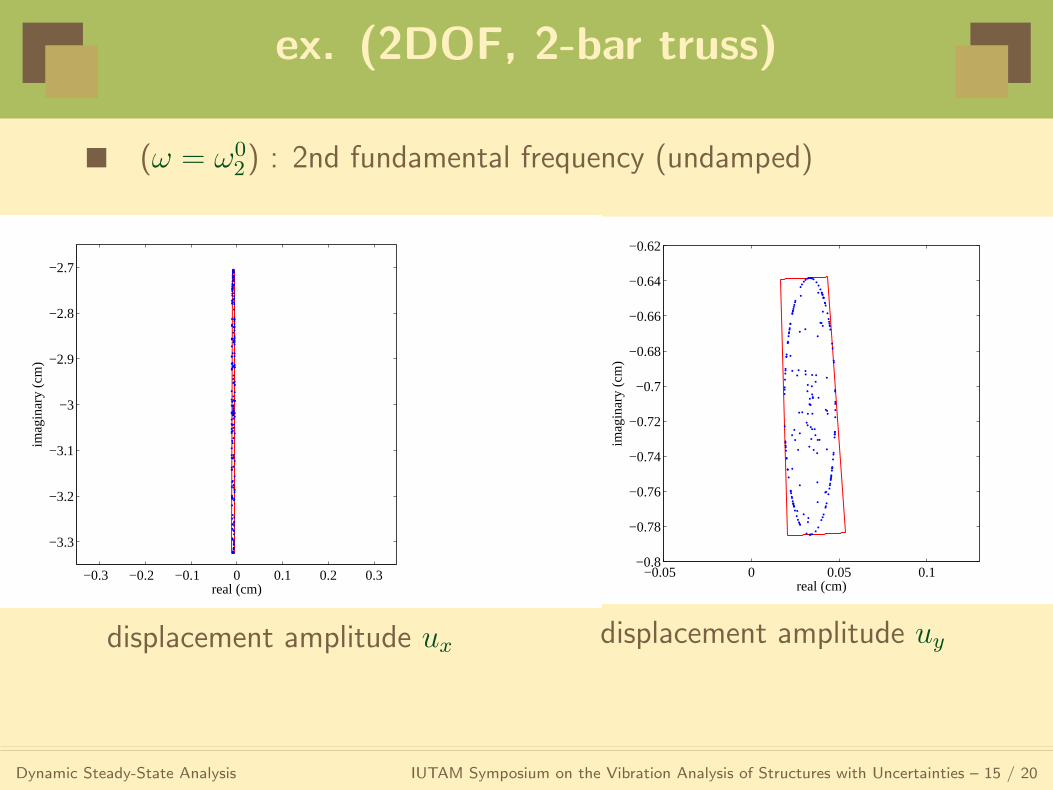
ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 15 / 20
■ (ω = ω0
2) : 2nd fundamental frequency (undamped)
−0.3 −0.2 −0.1 0 0.1 0.2 0.3
−3.3
−3.2
−3.1
−3
−2.9
−2.8
−2.7
real (cm)
imag
inar
y (c
m)
displacement amplitude ux
−0.05 0 0.05 0.1−0.8
−0.78
−0.76
−0.74
−0.72
−0.7
−0.68
−0.66
−0.64
−0.62
real (cm)
imag
inar
y (c
m)
displacement amplitude uy

ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 16 / 20
■ distribution of the vector
[|ux||uy|
](ω = ω0
1)
−2 0 2 4 60
1
2
3
4
5
6
7
8
−|ux| (cm)
|uy| (
cm)
−3 −2 −1 0 1
3
4
5
6
7
−|ux| (cm)
|uy| (
cm)
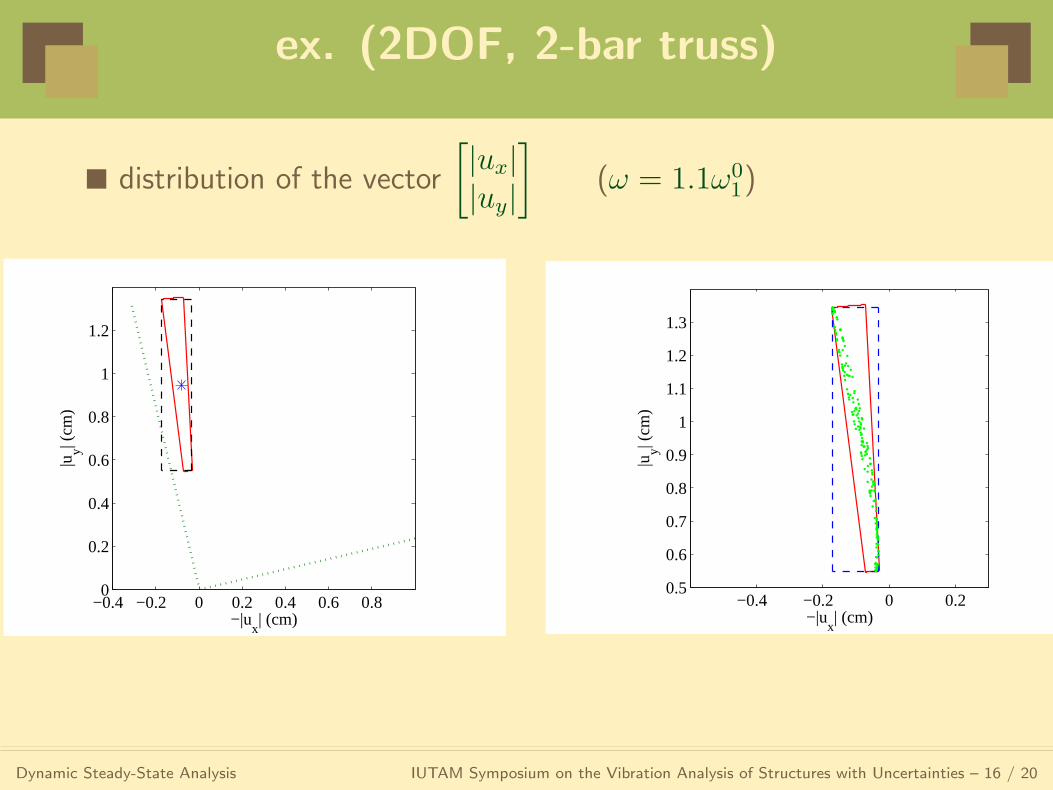
ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 16 / 20
■ distribution of the vector
[|ux||uy|
](ω = 1.1ω0
1)
−0.4 −0.2 0 0.2 0.4 0.6 0.80
0.2
0.4
0.6
0.8
1
1.2
−|ux| (cm)
|uy| (
cm)
−0.4 −0.2 0 0.20.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
−|ux| (cm)
|uy| (
cm)

ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 16 / 20
■ distribution of the vector
[|ux||uy|
](ω = 1.3ω0
1)
−0.1 0 0.1 0.2 0.3 0.40
0.1
0.2
0.3
0.4
0.5
|ux| (cm)
|uy| (
cm)
0 0.05 0.1 0.15 0.2 0.25
0.2
0.25
0.3
0.35
0.4
0.45
|ux| (cm)
|uy| (
cm)

ex. (2DOF, 2-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 16 / 20
■ distribution of the vector
[|ux||uy|
](ω = ω0
2)
0 1 2 30
0.5
1
1.5
2
2.5
3
3.5
4
|ux| (cm)
|uy| (
cm)
2.8 3 3.20.4
0.5
0.6
0.7
0.8
0.9
1
1.1
|ux| (cm)
|uy| (
cm)

ex. (20DOF, 29-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 17 / 20
(b) (a) x
y
f∼f
∼
■ nominal driving loadf : 8 kN, 12 kN
■ uncertainty nodal loads
◆ at all the nodes
◆ perturb independently
■ complex damping:ωC = 2βK (β = 0.02)
ex. (20DOF, 29-bar truss)
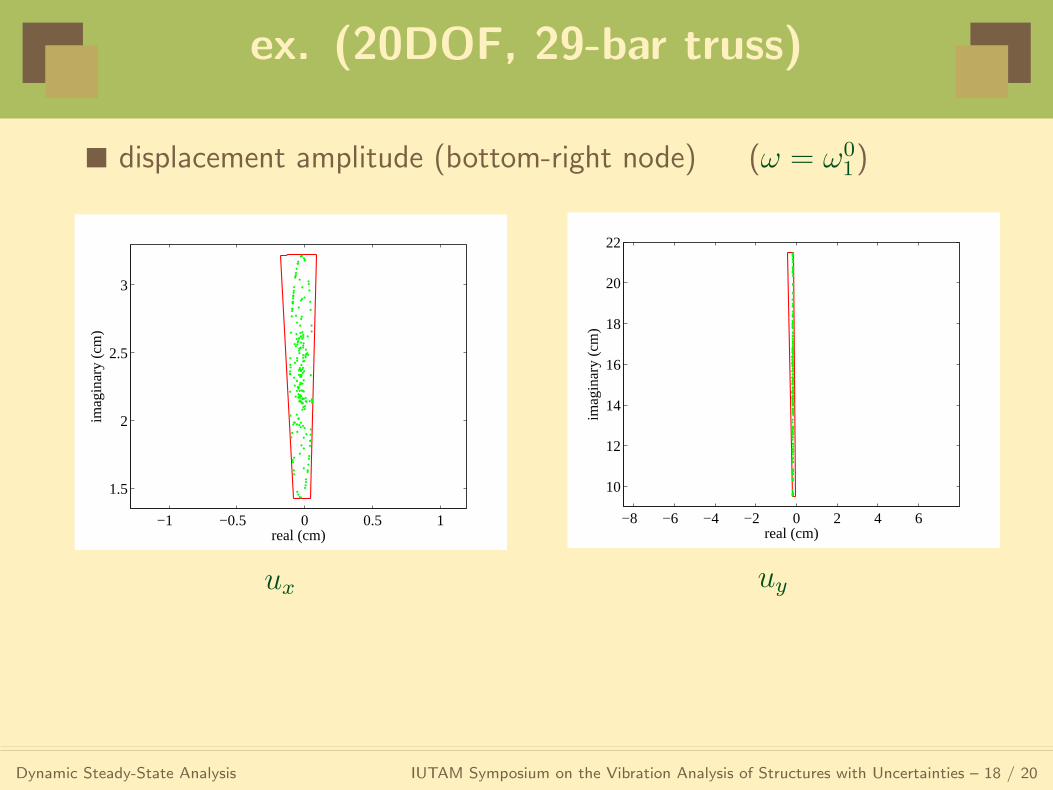
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 18 / 20
■ displacement amplitude (bottom-right node) (ω = ω0
1)
−1 −0.5 0 0.5 1
1.5
2
2.5
3
real (cm)
imag
inar
y (c
m)
ux
−8 −6 −4 −2 0 2 4 6
10
12
14
16
18
20
22
real (cm)
imag
inar
y (c
m)
uy

ex. (20DOF, 29-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 18 / 20
■ displacement amplitude (bottom-right node)variations w.r.t. α (‘magnitude’ of uncertainty)
0 0.2 0.4 0.6 0.8 11
1.5
2
2.5
3
3.5
α
mod
ulus
(cm
)
|ux|
0 0.2 0.4 0.6 0.8 11.54
1.56
1.58
1.6
1.62
1.64
1.66
1.68
α
phas
e an
gle
(rad
)
arg ux

ex. (20DOF, 29-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 18 / 20
■ displacement amplitude (bottom-right node)variations w.r.t. α (‘magnitude’ of uncertainty)
0 0.2 0.4 0.6 0.8 18
10
12
14
16
18
20
22
α
mod
ulus
(cm
)
|uy|
0 0.2 0.4 0.6 0.8 11.575
1.58
1.585
1.59
1.595
1.6
αph
ase
angl
e (r
ad)
arg uy

ex. (20DOF, 29-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 18 / 20
■ displacement amplitude (bottom-right node)variations w.r.t. ω (circular frequency)
1.3 1.4 1.5 1.6 1.7 1.8 1.9 2−0.5
0
0.5
1
1.5
2
2.5
3
3.5
ω (rad/sec)
mod
ulus
(cm
)
|ux|
1.3 1.4 1.5 1.6 1.7 1.8 1.9 20
5
10
15
20
25
ω (rad/sec)m
odul
us (
cm)
|uy|

ex. (20DOF, 29-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 19 / 20
■ distribution of the vector
[|ux||uy|
](ω = ω0
1)
0 10 20−5
0
5
10
15
20
|ux| (cm)
|uy| (
cm)
−5 0 58
10
12
14
16
18
20
22
|ux| (cm)
|uy| (
cm)

ex. (20DOF, 29-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 19 / 20
■ distribution of the vector
[|ux||uy|
](ω = 1.2ω0
1)
0 0.5 1 1.5
0
0.5
1
1.5
|ux| (cm)
|uy| (
cm)
−0.4 −0.2 0 0.2 0.4 0.6 0.80.6
0.8
1
1.2
1.4
1.6
1.8
|ux| (cm)
|uy| (
cm)

ex. (20DOF, 29-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 19 / 20
■ distribution of the vector
[|ux||uy|
](ω = 1.3ω0
1)
0 0.5 1
−0.2
0
0.2
0.4
0.6
0.8
1
|ux| (cm)
|uy| (
cm)
−0.2 0 0.2 0.4 0.60.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
|ux| (cm)
|uy| (
cm)

ex. (20DOF, 29-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 19 / 20
■ distribution of the vector
[|ux||uy|
](ω = ω0
2)
−1 −0.5 0 0.5
−0.5
0
0.5
1
−|ux| (cm)
|uy| (
cm)
−1 −0.8 −0.6 −0.4 −0.2 00
0.2
0.4
0.6
0.8
1
1.2
−|ux| (cm)
|uy| (
cm)

ex. (20DOF, 29-bar truss)
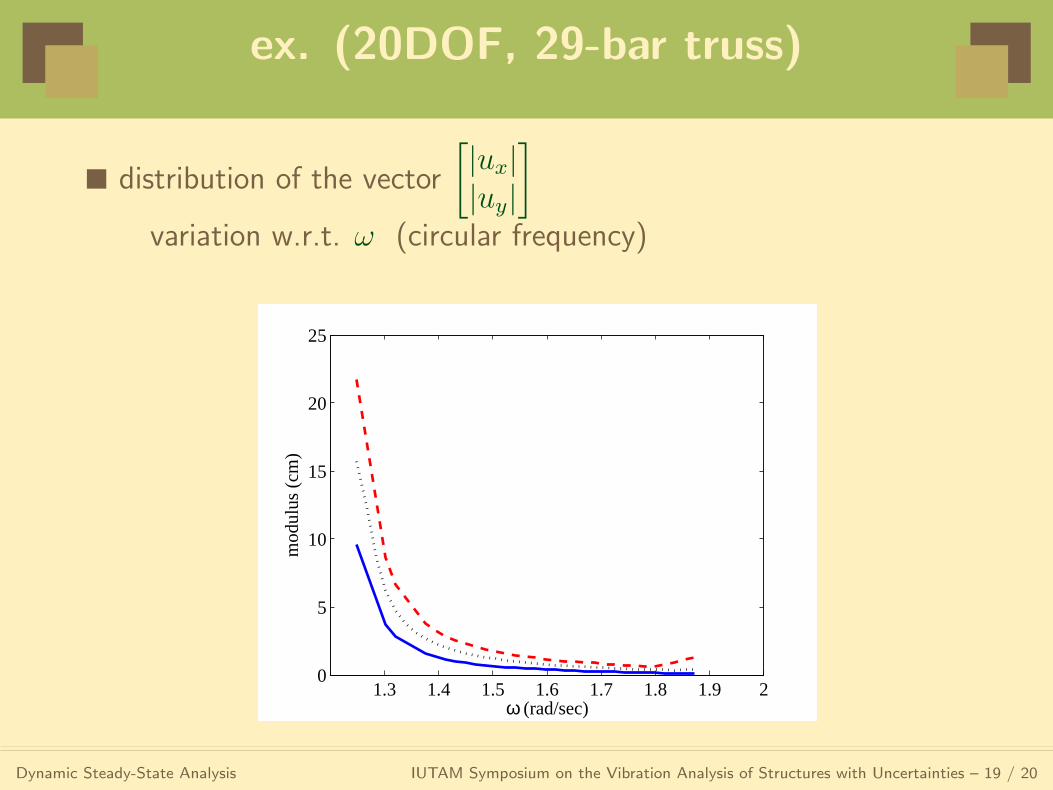
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 19 / 20
■ distribution of the vector
[|ux||uy|
]
variation w.r.t. α (‘magnitude’ of uncertainty)
0 0.2 0.4 0.6 0.8 18
10
12
14
16
18
20
22
α
mod
ulus
(cm
)
ex. (20DOF, 29-bar truss)
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 19 / 20
■ distribution of the vector
[|ux||uy|
]
variation w.r.t. ω (circular frequency)
1.3 1.4 1.5 1.6 1.7 1.8 1.9 20
5
10
15
20
25
ω (rad/sec)
mod
ulus
(cm
)

conclusions
Dynamic Steady-State Analysis IUTAM Symposium on the Vibration Analysis of Structures with Uncertainties – 20 / 20
■ uncertainty of dynamic load
◆ uncertainty of harmonic exciting load
◆ steady state of a damped structure
■ bounds of response
◆ modulus & argument of displacement amplitude
◆ RO formulation
◆ SDP approximation
◆ conservativeness← an approximate optimal solution of (RO)