dynamic behavior characterization of a power transfer …1234119/fulltext01.pdf · power transfer...
TRANSCRIPT

Dynamic behavior characterization of aPower Transfer Unit using Multi Body
Simulation
PUNEETH LINGAIAH
MASTER OF SCIENCE THESIS TRITA-ITM-EX 2018:366KTH INDUSTRIAL ENGINEERING AND MANAGEMENT
MACHINE DESIGNSE-100 44 STOCKHOLM


Master of Science Thesis TRITA-ITM-EX 2018:366
Dynamic behavior characterization of a PowerTransfer Unit using Multi Body Simulation
Puneeth Lingaiah
Approved Examiner Supervisor2018-06-11 Ulf Sellgren Stefan Björklund
Commisioner Contact PersonGKN Driveline AB Stefano Orzi
Abstract
Automotive drive units play an important role in transmitting power from an engine to the wheels.In today’s competitive world, there is an increasing demand for these devices to be more efficient,quiet, and reliable at the same time. In order to achieve this, a better understanding of system’sdynamic behavior is necessary. A detailed dynamic model of a system is often computationallyintense to solve and time consuming. This demands more efficient tools to be developed and insome cases integrating two or more tools would be a better option. The integrated platform can beused to effectively model the dynamic behavior of a system and get better insights on the systembehavior.
Power Transfer Unit (PTU) is a device whose function is to distribute power between a front axleand rear axle. This unit basically includes hypoid gear set and a dog clutch that is engaged whenthere is a requirement to transfer power to the Rear Drive Unit (RDU) through prop shaft. Thismaster thesis describes modeling the dynamic behavior of a PTU with a goal of predicting thetransmission error in the system and its effect as a source of excitation on the entire unit followedby studying system response to this type of excitation. MSC ADAMS was used as a Multi-BodySimulation tool to model the dynamic behavior of the PTU.
The transmission error predicted by the simulation was compared with the test results, a co-simulation between SIMULINK and ADAMS was established in order to create a platform toapply optimization algorithms. The bolt and bearing stiffness were incorporated in the model andtheir effect on the mounting point accelerations and bearing point accelerations were studied. Itwas found that the bolt stiffness affects the acceleration levels at the coupling points and suitablealgorithms could be applied in order to find an optimum value. As a result of the good correlationbetween test and simulation data, some other useful conclusions have been derived in order todevelop this approach of modeling.
Keywords: Power Transfer Unit (PTU), Rear Drive Unit (RDU), Multi-body simulation (MBS),Transmission Error (TE), MSC ADAMS
i


Master of Science Thesis TRITA-ITM-EX 2018:366
Simulering av en vinkelväxels dynamiska beteende
Puneeth Lingaiah
Godkänd Examinator Handledare
2018-06-11 Ulf Sellgren Stefan BjörklundUppdragsgivare Kontaktperson
GKN Driveline AB Stefano Orzi
SammanfattningVinkelväxlar och slutväxlar spelar en viktig roll för kraftöverföringen mellan motor och hjul
i fyrhjulsdrivna bilar. Med en ökande konkurrens finns en efterfrågan för att ständigt förbät-
tra effektivitet, ljudgenereringegenskaper och hållfasthet. För att uppnå detta krävs en bättre
förståelse av systemets dynamiska egenskaper. En detaljerad numerisk dynamisk modell är
dock ofta beräkningsmässigt tung och tidskrävande. Verktygen för den dynamiska modelleringen
behöver bli mer effektiva och i vissa fall kan en kombinationen av två verktyg vara ett bättre
alternativ. Denna integrerade plattform kan användas för att effektivt modellera dynamiken och
få en bättre inblick i systemts beteende.
Vinkelväxlen är en enhet vars funktion är att fördela kraften mellan fram- och bakaxel. De vikti-
gaste komponenterna i vinkelväxeln är en hypoid-drevsats och en klokoppling, som aktiveras när
kraft ska överföras till bakaxeln via kardanaxeln. Detta arbete modellerar dynamiskt beteende
i vinkelväxeln och har sytftet att beräkna transmissionsfelet i systemet och dess effekt som
exciteringskälla av ljud och vibrationer i systemet. MSC ADAMS har använts för Multi-Body
beräkningsverktyg för modelleringen.
Det beräknade transmissionsfelet har jämfört med testresultat. Dessutom har en co-simulering
med både ADAMS och SIMULINK genomförts för att skapa en bas för tillämpa optimeringsalgo-
ritmer. Bultarna i bultförbandet samt deras styvhet och förspänning har inkluderats i modellen
och studerats med avseende på effekten på vibrationer i kopplingspunkter, samt algoritmer
för optimering har föreslagits. Korrelationen mellan test och beräkning var mycket god, och
dessutom har förslag på hur denna typ av beräkning kan förbättras ytterligare givits.
Nyckelord: Vinkelväxlen (PTU), Multi Body Simulering (MBS), Bakaxeln(RDU), Transmissions-
felet (TE), MSC ADAMS
iii


Foreword
With a great sense of satisfaction performing my master thesis at GKN Driveline AB, Köping, Iwould like to thank Magnus Löfberg for providing this wonderful opportunity and Stefano Orzifor being my supervisor and guiding me throughout the journey at GKN. I would like to extend mygratitude to CAE and Design team at GKN Driveline for helping me in so many ways and alsowould like to thank all who have played a major role in my thesis.
Special thanks to my academic supervisor Stefan Björklund and examiner Ulf Sellgren at KTHRoyal Institute of Technology for their valuable suggestions and guidance to make this workpossible.
I would like to dedicate this work to my beloved parents Sharada and Lingaiah for all theirsupport, encouragement and endless love all throughout my life.
Puneeth LingaiahStockholm, June 2018
v


NomenclatureAbbreviations
PTU Power Transfer Unit
AWD All Wheel Drive
RDU Rear Drive Unit
NVH Noise Vibration and Harshness
TE Transmission Error
MBS Multi-Body Simulation
EOL End of Line
MNF Modal Neutral File
RPM Rotations Per Minute
FEA Finite Element Analysis
DOF Degree of Freedom
RBE Rigid Body Element
BAC Bolt Acceleration Computation
SVL Surface Velocity Levels
CMS Component Mode Synthesis
DOE Design of Experiments
FFT Fast Fourier Transform
vii

Table of Contents
Abstract i
Sammanfattning iii
Foreword v
Nomenclature vii
1 Introduction 11.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Purpose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Delimitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.4 Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Frame of Reference 52.1 Bevel gears . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Hypoid gears . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.2 Contact Ratio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.3 Tooth Force on Hypoid Gears . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Gear Mesh Stiffness . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Transmission error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4 Contact mechanics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4.1 Contact Force in MSC ADAMS . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 Modal analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.5.1 Modal superposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.6 Multi-Body Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.6.1 Rigid Body Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.6.2 Flexible Body Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.6.3 Equations governing flexible bodies . . . . . . . . . . . . . . . . . . . . . . . . 17
2.7 Power Transfer Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3 Implementation 213.1 Modeling Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1.1 Geometry and Material Properties . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1.2 Generating NASTRAN input file . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1.3 Generating Modal Neutral File . . . . . . . . . . . . . . . . . . . . . . . . . . 23
viii

TABLE OF CONTENTS
3.2 MBS Environment - MSC ADAMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.1 Importing Flexible body in ADAMS . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.2 Unit system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.3 Joints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.4 Motions and Force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2.5 Contact Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2.6 Bolt modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2.7 Bearing stiffness . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3 Models built in MSC ADAMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.3.1 Hypoid Gear Pair Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.3.2 Complete Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.3.3 Solver settings and Simulation Parameters . . . . . . . . . . . . . . . . . . . 35
3.4 SIMULINK-ADAMS Co-simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.4.1 Defining State Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.4.2 Exporting ADAMS control Plant . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.4.3 Simulation parameters in SIMULINK . . . . . . . . . . . . . . . . . . . . . . 37
4 Results and Discussion 394.1 Forces on Hypoid Gears . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.1.1 Analytical results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.1.2 MSC ADAMS Simulation results . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.2 Transmission Error (TE) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.2.1 TE - Hypoid gear set level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.2.2 EOL and TE Test Rig - Test results . . . . . . . . . . . . . . . . . . . . . . . . 44
4.2.3 Comparing Test and Simulation TE values . . . . . . . . . . . . . . . . . . . 44
4.3 Acceleration of Bearing points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.4 Acceleration of mounting points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.5 Co-Simulation results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.6 Transient behavior of the system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5 Conclusions and Future work 535.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.2 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
References 55
Appendix 57
ix


Chapter 1
IntroductionThis chapter introduces the reader to the background of this thesis, its purpose, the delimitations
involved and also the method followed to accomplish the work.
1.1 Background
GKN plc is a multinational company head quartered in the UK. The main business of GKN is to
provide technology driven products mainly in the aerospace and automotive sector. The work that
is presented here was carried out at GKN Driveline Köping AB. This unit of GKN group, excels in
developing and manufacturing All Wheel Drive (AWD) systems. A typical AWD system consists
of a Power Transfer Unit (PTU) with a connect-disconnect functionality and a Rear Drive Unit
(RDU) both connected by a Propshaft. A good knowledge on dynamic behavior of these systems
in real time application is of high importance from the Noise, Vibration and Harshness (NVH)
perspective. Automotive products are optimized to low weight and high performance resulting in
low intrinsic damping, high vehicle power to weight ratio [Menday, 2010]. The identification of
vibratory excitation from various sources at varied environment is another challenge. These are
some of the main reasons for better understanding NVH, studying the propagation of vibration
through complex paths, also modeling them to fit varied applications. This can be achieved by
simplified modeling and integrating domain specific tools that are well established. One small
step in that direction is the objective of this thesis.
Figure 1.1: Typical All wheel Drive Unit (AWD)
1

CHAPTER 1. INTRODUCTION
1.2 Purpose
The purpose of this work is to develop methods for realistic modeling along with computational
efficiency within Multi-Body Simulation (MBS) and interfacing different tools to understand
the potential benefits of control strategies, optimization methods without compromising on the
accuracy of the results. The built dynamic model should be able to be detailed in stages and used
as an efficient integrated tool for product development, to minimize corrections after the End of
Line (EOL) tests.
The goal of this thesis is to build the dynamic model of a PTU including an hypoid gear pair
contact definition within MBS environment, focus is also on determining the transmission error
and correlating with the test results. The research questions that would address the goal of this
thesis are as follows:
• Can flexible multi-body modeling in MBS predict transmission error of a drive unit?
• How to increase computational efficiency by simplified modeling approach?
• Does interfacing MBS with other tools increase the controlling and optimizing options?
1.3 Delimitation
Simulating reality involves considering numerous design variables into account, the nonlineari-
ties present in the system. Often it is computationally expensive to consider every aspect of the
system, a balanced approach between reality and assumption is required to achieve the desired
level of accuracy in results. A dynamic model of PTU consists of non linear system properties and
sensitive variables like shaft misalignments, bearing preload which influence the contact pattern
between two mating gears to a greater extent. As a primary step, to achieve the purpose of this
thesis, the present work proceeds by making certain assumptions and considerations as follows:
• Bearing stiffness is non linear and depends on many factors, it plays an important role in a
coupled system and setting an optimum stiffness value improves the overall response of
the system [Jinli u.a., 2016], this work excludes the non linearity in the bearing stiffness
and assumes it to be linear during the simulation.
• The contact parameters’ non-linearity between hypoid gear pair is not considered into
account and is modeled as an impact force (spring damper system) whose parameters will
be considered constant throughout the simulation.
• Drive units usually contain certain lubricative fluids to reduce the friction between mating
parts, this lubrication effect of the oil is not considered and hence viscous forces are not
included in the dynamic model.
2

1.4. METHOD
• The thermal expansion of the material will have slight influence on the gear misalignments
and bearing preload which is not included in this work.
• Disturbance from outside environment such as engine noise, noise from wheel-road interac-
tion and chassis vibration is not included in the model.
• Clutch pack is excluded from the model since the behavior of the core components has to be
understood in the primary stage.
1.4 Method
The method includes analyzing the functionality of the system and individual components to
understand critical areas such as bearings, hypoid gear pair contact, bolt preload and stiffness
etc. These areas were considered to be significant while modeling, since they greatly influence
the dynamic behavior of the system. Also the existing modeling methods were taken into account.
The geometry details of all the components involved in this model were analyzed and certain
features such as splines, threads, steps etc. which do not contribute much to the dynamic behavior
were removed and/or simplified to basic representation. These features were known to increase
the pre-processing and computational time of the simulation with no influence on the results. All
components were meshed in SIMLAB tool and exported as a NASTRAN input file which were
then imported into NASTRAN-PATRAN. The boundary conditions, material properties were spec-
ified and finally the modal behavior of individual component was captured for a pre-determined
frequency band by performing modal analysis, the same result was exported as modal neutral
file (.mnf).
The .mnf file which thus contain the modal information of individual component was imported
into MSC ADAMS which was selected as MBS tool to be used in this work. Now, the bodies
were treated as flexible entities and were connected to each other via respective joints. Motion,
force and contact were defined at specific locations followed by running the simulation to get the
results for correlation with the test data.
A co-simulation was set up between MATLAB-SIMULINK and MSC ADAMS to explore sim-
plifying and optimizing methods in order to develop the product effectively and later the same
integrated tool could be used to apply complex control strategies to test and increase the perfor-
mance of the system.
3

Chapter 2
Frame of ReferenceThis chapter describes the associated theoretical background, existing research that is present in
this field and an insight towards the literatures that were referred during the thesis.
2.1 Bevel gears
Bevel gears are one among many type of gears, which are employed to transmit power at a certain
angle usually in a perpendicular direction, the shaft axis of the mating bevel gears intersect each
other at an angle. They are employed in various fields, right from devices like nut runner to
advanced systems like aircrafts. They are classified based on attributes like progression of tooth
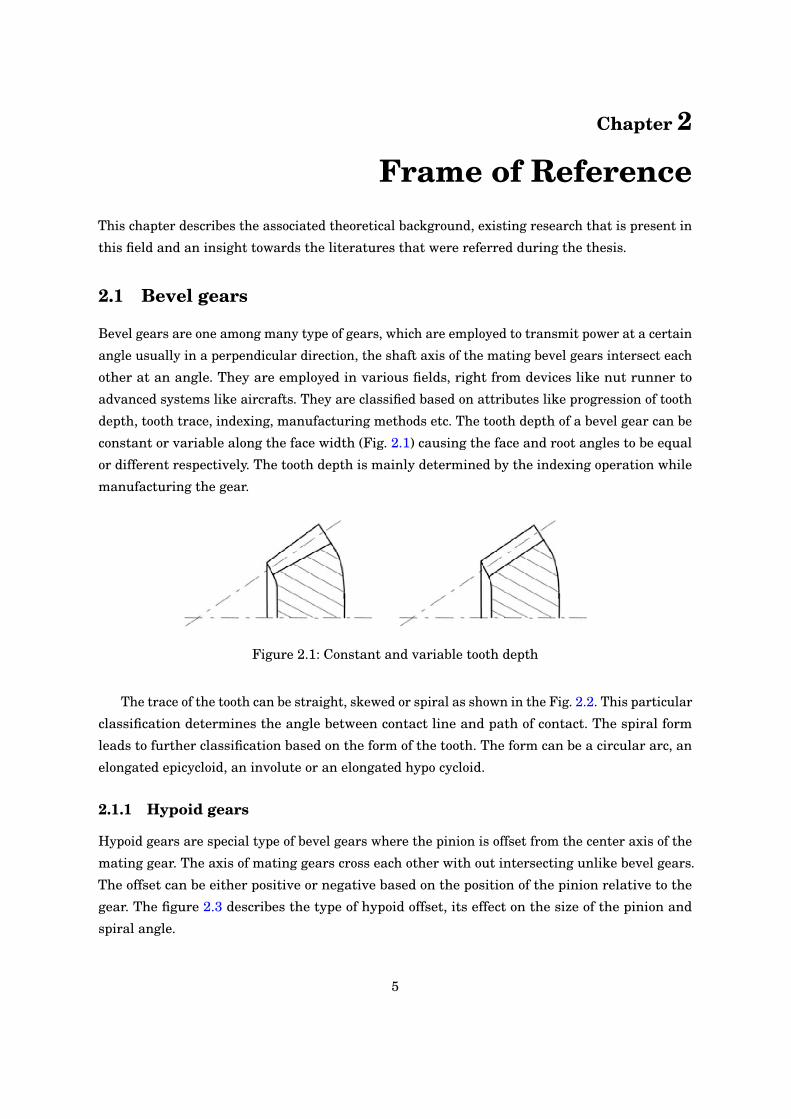
depth, tooth trace, indexing, manufacturing methods etc. The tooth depth of a bevel gear can be
constant or variable along the face width (Fig. 2.1) causing the face and root angles to be equal
or different respectively. The tooth depth is mainly determined by the indexing operation while
manufacturing the gear.
Figure 2.1: Constant and variable tooth depth
The trace of the tooth can be straight, skewed or spiral as shown in the Fig. 2.2. This particular
classification determines the angle between contact line and path of contact. The spiral form
leads to further classification based on the form of the tooth. The form can be a circular arc, an
elongated epicycloid, an involute or an elongated hypo cycloid.
2.1.1 Hypoid gears
Hypoid gears are special type of bevel gears where the pinion is offset from the center axis of the
mating gear. The axis of mating gears cross each other with out intersecting unlike bevel gears.
The offset can be either positive or negative based on the position of the pinion relative to the
gear. The figure 2.3 describes the type of hypoid offset, its effect on the size of the pinion and
spiral angle.
5

CHAPTER 2. FRAME OF REFERENCE
Figure 2.2: Straight, Skewed and Spiral bevel gears
Figure 2.3: Hypoid Offset
There are two types of hypoid pinion offset, positive and negative. In case of positive offset,
the pinion axis is displaced in the direction of the spiral angle of the gear and in case of negative
the displacement is in the opposite direction of the spiral angle. The mean helix angle of the
pinion when compared with that of the gear is larger for positive offset and smaller for negative
offset. The diameter of the pinion when compared with that of an equivalent gear set with no
offset, increases with positive offset and decreases with negative offset [Klingelnberg, 2016].
6

2.1. BEVEL GEARS
2.1.2 Contact Ratio
Contact ratio is a parameter which describes the average no. of teeth that are simultaneously
engaged. The total contact ratio is the sum of contact ratio and overlap ratio which results
from the working height of the profile and spiral angle respectively, provided the tooth flanks
are perfectly conjugate. Crowning of bevel gears results in slight decrease of the contact ratio
from non crowned gears. Tooth flexibility, contact pattern, flattening of tooth under load, axes
deflection have to be considered while calculating the actual contact ratio.
(2.1) Prof ile contact ratio = εα = Path of contactBase pitch
(2.2) Overlap ratio = εβ = included angle of the f ace width (φβ)included angle of one axial pitch (τ)
(2.3) Total contact ratio = εγ = εα + εβ (valid f or con jugate tooth f lanks)
(2.4) Total contact ratio = εγ =√ε2α +ε2
β) (valid f or ell iptical contact pattern)
Figure 2.4: Contact Ratio source: [Klingelnberg, 2016]
2.1.3 Tooth Force on Hypoid Gears
The contact between hypoid gear pair generates a 3D force which is resolved into three mutually
perpendicular directions namely axial, radial and tangential with respect to the rotation axis of
gear bodies as shown in the fig 2.5. The force value differs depending on the drive or coast side,
the drive flank for pinion is concave and coast flank is convex, whereas for ring gear it is vice
versa.
7

CHAPTER 2. FRAME OF REFERENCE
Figure 2.5: Tooth forces. 1 pinion, 2 wheel, 3 direction of rotation, Source: [Klingelnberg, 2016]
2.2 Gear Mesh Stiffness
The compliance involved in an hypoid geared rotor model is a combined effect of many factors. The
major contribution to this is; from the gear and pinion shaft torsional stiffness, three translation
and two rotational stiffness at every bearing location and finally the gear mesh stiffness. The
figure 2.6 shows the lumped mass model of an hypoid gear rotor system.
Figure 2.6: 14 DOF hypoid geared rotor system model, Source [Wang u.a., 2013]
8

2.3. TRANSMISSION ERROR
Gear mesh stiffness is the combined effect of tooth and contact compliance. The hypoid gear
pair usually have three tooth pair contact as shown in the figure 2.7 and this is dependent on load,
pinion roll angle and tooth geometry [Wang u.a., 2013]. Gear mesh stiffness is simply defined as
follows:
(2.5) Km = FeL − eo
where,
Km = mesh stiffness of the gear pair,
F = total force along the line of action in the contact region,
e l and eo are translational loaded and unloaded transmission error (TE).
Figure 2.7: Tooth pair contact regions
The mesh stiffness varies along the gear tooth width, the variation profile is different for each
engaging gear tooth pair, which is the main reason for varying mesh force that cause TE and
vibration in the structure.
2.3 Transmission error
The transmission error (TE) in a gear drive is one of the main reason for gear noise and is termed
as the potential excitation source of vibration in the system [Henriksson.M, 2009]. The vibration
frequency from TE varies from low meshing order frequency to high frequency tonal noise due to
gear tooth surface characteristics.
The TE is defined as the difference between the theoretical angular position of a driven gear
assuming ideal conditions and it’s actual angular position, as shown in the figure 2.8. Mathemati-
cally it is expressed as follows:
(2.6) T.E =Θgear −Rpinion
RgearΘpinion
9

CHAPTER 2. FRAME OF REFERENCE
where,
Θgear = angular position of ring gear
Θpinion = angular position of pinion
Rpinion and Rgear = pitch circle radius of pinion and gear respectively.
Figure 2.8: Transmission Error
To study TE in detail, it is classified into three types mainly based on the response at different
torque and speed levels.
1. Geometrical Transmission Error:The Geometrical TE is something which is related to manufacturing defects and assembly
errors in the gear drive unit, a slight eccentricity in the pinion or gear, surface defects
on the flanks, pitch errors etc. are some typical examples which cause geometrical TE. It
is measured by giving a low rotational speed to the pinion with no load/torque so as to
determine the load independent errors in the drive.
2. Static Transmission Error:The Static TE includes all entities which cause geometric TE and in addition to that it also
considers the effect of gear body distortion and gear tooth stiffness into account. Static
TE is measured at low rpm but in loaded condition to capture the effect of varying mesh
stiffness.
3. Dynamic Transmission Error:The Dynamic TE includes all the factors that cause static TE and in addition to that it also
10

2.4. CONTACT MECHANICS
considers the support stiffness, drive shaft stiffness and damping effects from them. In
other words, it tries to take into account the induced disturbance from the support/bearings
due to gear contact. This is measured at high speed and high load rating.
2.4 Contact mechanics
The Hertzian contact mechanics was used to calculate the approximate contact stiffness between
Pinion and Ring gear. Since the contacting bodies were three dimensional, formulations of
elliptical contact [Johnson, 1985] were employed to calculate the contact stiffness between them.
(2.7) Rc =√
RaRb
(2.8) Ra = 1(A+B)− (B− A)
(2.9) Rb =1
(A+B)− (B− A)
(2.10) A+B = 12
{ 1R1xx
+ 1R1yy
+ 1R2xx
+ 1R2yy
}
(2.11) B− A = 12
{( 1R1xx
− 1R1yy
)2 + ( 1R2xx
− 1R2yy
)2 +2( 1R1xx
− 1R1yy
)( 1R2xx
− 1R2yy
)cos(2α)
} 12
(2.12) c =(3PRc
4Ec
) 13 F1
(2.13) F1= 1−[(Ra
Rb
)0.0602 −1]1.456
(2.14) F2= 1−[(Ra
Rb
)0.0684 −1]1.531
Normal stiffness is defined as:
(2.15) k = 2 Ec cF1 F2
where,
R1xx, R1yy, R2xx, R2yy are radius of curvature of two contacting 3D bodies in two mutually
perpendicular planes, the subscript 1 and 2 represent first and second body.
P is the normal load.
’α’ is the angle between orthogonal system of first body w.r.t that of second body.
11

CHAPTER 2. FRAME OF REFERENCE
2.4.1 Contact Force in MSC ADAMS
The contact definition in MSC ADAMS between two bodies can be modelled as restitution based
or IMPACT function based. Restitution based contact definition does not support contact between
flexible bodies, where as IMPACT function does.
The IMPACT function in ADAMS is defined as IMPACT (x, x’, x1, k, e, Cmax, d) [MSC-Software,
2017]. The arguments are defined as follows:
x = instantaneous distance between I and J marker of contacting bodies as shown in fig. 2.9
x’= time derivative of the distance between the markers
x1 = distance between I Marker from the boundary of its respective body
k = stiffness of the boundary surface interaction
e = positive real variable that specifies the exponent of the force - deformation characteristic. For
a stiffening spring characteristic, e > 1.0. For a softening spring characteristic, 0 < e < 1.0.
Cmax = damping co efficient
d = specifies boundary penetration which results in full damping from ADAMS Solver
Figure 2.9: Illustration of Impact, Source [MSC-Software, 2017]
(2.16) IMP ACT ={
Max (0, k (x1−x)e−STEP (x, x1−d, cmax, x1, 0). x′)) : x<x10 : x<x1
}The penetration is said to happen only when x < x1 criteria is met and a separating force sets in,
whose value is defined by the Impact function and if x > x1, then the force is set to zero. When
the penetration depth in simulation reaches the set limit ’d’, then there is an activation of full
damping which would have followed a cubic function from 0 to ’Cmax’ as shown in fig. 2.10.
12

2.5. MODAL ANALYSIS
Figure 2.10: Damping co-efficient as function of penetration depth, Source : [MSC-Software, 2017]
2.5 Modal analysis
Modal analysis is a method of identifying the vibration characteristics of a given component in the
form of mode shapes and modal properties such as stiffness and damping. There are two ways to
capture the modal behavior namely, experimental modal analysis and FEM based modal analysis.
The method followed in this thesis is FEM Based Modal Analysis which involves discretizing the
component into finite elements and then capturing its modal behavior within a frequency band of
interest.
FEM Model consist large degree of freedom (DOF) due to large number of nodes in a discretised
component. Hence a technique called FE condensation is used to reduce component’s DOF. Any
condensation technique basically involves creating Ritz vectors that are used to reduce full size
mass, stiffness and damping matrix of a discretized component.
If we consider a system governed by the following equation:
(2.17) Mx′′ + Cx′ + kx = 0
where xT = [x1, x2, x3,.....xn] is the generalized displacement for all n DOF in the model. The
basic idea of FE condensation is to reduce the displacement matrix to ’xr ’ with the help of Ritz
vectors in the following manner:
(2.18) x =Wxr
(2.19) Mr = WT M W , Cr = WT C W , and Kr = WT K W
where, W is the Ritz vector that constitute reduced basis and Mr,Cr,Kr are reduced mass, damp-
ing, and stiffness matrices [Sellgren, 2003]. Some of the important FE condensation techniques
are mentioned below
13

CHAPTER 2. FRAME OF REFERENCE
1. Static condensation also termed as Guyan reduction -The technique behind this condensation is to separate the entire DOF as master DOF and
slave DOF, the master DOF are retained where as the slave ones are removed and are
dependent on master DOF. The system is divided as follows:
(2.20)[
Kmm KmsKsm Kss
][umus
]=
[FmFs
]where, K, u, F represents stiffness, displacement and force respectively while subscript ’m’
and ’s’ stands for master and slave DOF. The Ritz vector for this condensation method is
defined as:
(2.21) W =[
I−K−ss1 Ksm
]this is used to reduce the stiffness and mass matrices. Some assumptions in this method
are, for low frequency modes the inertia forces on slave nodes are less significant when
compared with elastic forces exerted by master nodes. Slave nodes move quasi-statically
w.r.t master nodes. The challenges faced in this method are, to match the centre of mass
of reduced model with the parent model and also the inertia properties are affected. An
error called condensation error is introduced, which is dependent on choosing the master
nodes while FEM algorithms try to minimize this error by iteratively choosing different set
of master DOF [Sellgren, 2003].
2. Component mode synthesis by HurtyThe component mode synthesis was first proposed by Hurty and is used to capture the
modal behavior of large systems by dividing them into a specific no. of subsystems. The
component’s normal mode shapes and attachment mode shapes (equal to the number of
attachment nodes for a given substructure) is captured in this method. The attachment
mode shape refers to capturing the mode shape by applying a unit load at one attachment
node and zero load on rest of the nodes.
Figure 2.11: FEM based substructuring, Source: [Bathe u.a., 2014]
14

2.5. MODAL ANALYSIS
3. Craig-Bampton MethodThe Craig Bampton method is widely used in CMS technique, this method captures the
constrained mode shapes and fixed interface mode shapes of any given component [Craig,
2011]. The component nodes are subdivided into attachment nodes and internal nodes
fig 2.11, all attachment nodes are fixed during capturing the fixed interface mode shapes
where as in constraint mode shapes, a unit displacement is given to one attachment node
by fixing the rest of them. Hence the relation between the physical co-ordinates and modes
that are synthesised with Craig Bampton method goes as follows:
(2.22) u ={
uBuI
}=
[I 0
φIC φIN
] {qCqN
}Where,
uB = boundary or attachment DOF
uI = interior DOF
φIC = physical displacements of interior nodes in constraint modes
φIN = physical displacements of interior nodes in Normal modes
qC = the modal coordinates of the constraint modes
qN = the modal coordinates of the fixed-boundary normal modes.
Although Craig Bampton method is powerful in synthesizing the modal behaviour some
modifications and considerations are necessary namely, the rigid body mode shapes will
be truncated since MSC ADAMS compute its own rigid body modes, the constraint mode
shapes is based on static condensation and thus lack dynamic content that they should
exhibit [MSC-Software, 2017].
2.5.1 Modal superposition
The dynamic behavior of a finite element model with N DOF can be represented with relatively
less no of mode shapes that are captured from modal reduction techniques, any deformation of a
structure can be represented as combined contributions from these mode shapes. This is termed
as modal superposition and is defined as follows:
(2.23) u =M∑
i=0φi qi
where,
u = physical co ordinates
M = total number of modes
φi = mode shape vector
qi = modal co ordinates
15

CHAPTER 2. FRAME OF REFERENCE
2.6 Multi-Body Dynamics
2.6.1 Rigid Body Dynamics
The rigid body dynamics is a simplified form of simulating dynamics, this treats all bodies involved
in the analysis as un-deformable entities, this form of analysis is mainly used in applications
where elastic deformations and modal behavior of structures are of less important.
2.6.2 Flexible Body Dynamics
The flexible body dynamics considers the inherent elastic nature of a component that is involved
in the model, this consideration is important for modelling a complex system whose performance
and reliability assessment is of high importance. There is a huge variation in dynamic force
calculation with and with out considering the elastic nature of a particular component.
2.6.2.1 Kinematics of markers on flexible bodies
In MSC ADAMS, markers play an important role in defining the position, orientation of a flexible
body. They are used to measure entities such as velocity, accelerations of a node on a flexible body
and to define constraints between two bodies.
The instantaneous position of a marker on a flexible body is expressed as follows:
(2.24) ~rp = ~x + ~sp + ~up
where,
~x = position vector from ground to local reference of body B
~sp = undeformed position of point P w.r.t local reference of body B
~up = translational deformation vector of point P from undeformed position P
Figure 2.12: Marker position on a flexible body, Source: [MSC-Software, 2017]
16

2.6. MULTI-BODY DYNAMICS
The above equation is transformed to global coordinates in the following equation:
(2.25) ~rp = ~x + ABG (~sp + ~up)
where,
ABG = is the transformation matrix from local reference frame to gobal reference frame
up is the translation deformation vector of point P which is nothing but the modal superposition
of truncated mode shapes as a result of modal reduction and is expressed as follows:
(2.26) up =Φpq
where,
Φp is a part of complete modal matrix and contains the modal contribution of that node.
q is the modal coordinates
The general co ordinates that governs a flexible body is given as follows:
(2.27) ζ =
x
y
z
Ψ
Θ
Φ
qi
where x, y, z are translational co ordinates, Ψ, Θ, Φ are rotational co ordinates and q is modal
coordinates.
2.6.3 Equations governing flexible bodies
The Lagrange’s equation is applied to govern the flexible bodies and is defined as follows:
(2.28)ddt
(∂L∂ζ
)− ∂L
∂ζ+ ∂F
∂ζ+
[∂Ψ∂ζ
]Tλ − Q = 0
(2.29) Ψ = 0
where,
L = the lagrangian defined as L = T - V,
T being the kinetic energy and V being potential energy of the system.
F = energy dissipation function
Ψ = constraint equations
λ = the lagrange multipliers for constraints
17

CHAPTER 2. FRAME OF REFERENCE
ζ = the generalised coordinates
Q = generalised applied forces
Kinetic energy, T is defined as:
(2.30) T = 12ζT M(ζ) ζ
The mass matrix M is governed by nine inertia invariants which are basically computed from
finite number of nodes in the FEM model based on nodal mass, its undeformed location and its
involvement in the component modes Φp [MSC-Software, 2017]
The nine inertia invariants play an important role in the modal formulation of flexible bodies,
by activating only specific invariants the formulation method can be chosen. The four major
formulations are rigid, constant, partial coupling and full coupling.
In ’rigid’ formulation, invariant 6 also termed as modal mass, is disabled. This formulation treats
flexible bodies as rigid and is close to simulating rigid body dynamics. The ’constant’ formulation
disables 3, 4, 5, 8 and 9 invariants, the flexible nature of bodies is included but this formulation
does not take into account the variation of inertial properties due to body deformation.
In case of ’partial’ coupling, invariants 3, 4, 5 and 9 are disabled, this formulation considers
the effect of body deformations on inertial properties. The ’full coupling’ method activates all
invariants except 3 and 4, which results in considering second order correction to the inertial
properties due to body deformations, this is used only when full accuracy is required. There would
be a small difference in the accuracy of results when full coupling method is preferred over partial
but there should always be a fair judgment before choosing between these two methods since
the second order correction might not be required untill and unless the bodies are too flexible or
application demands it.
2.7 Power Transfer Unit
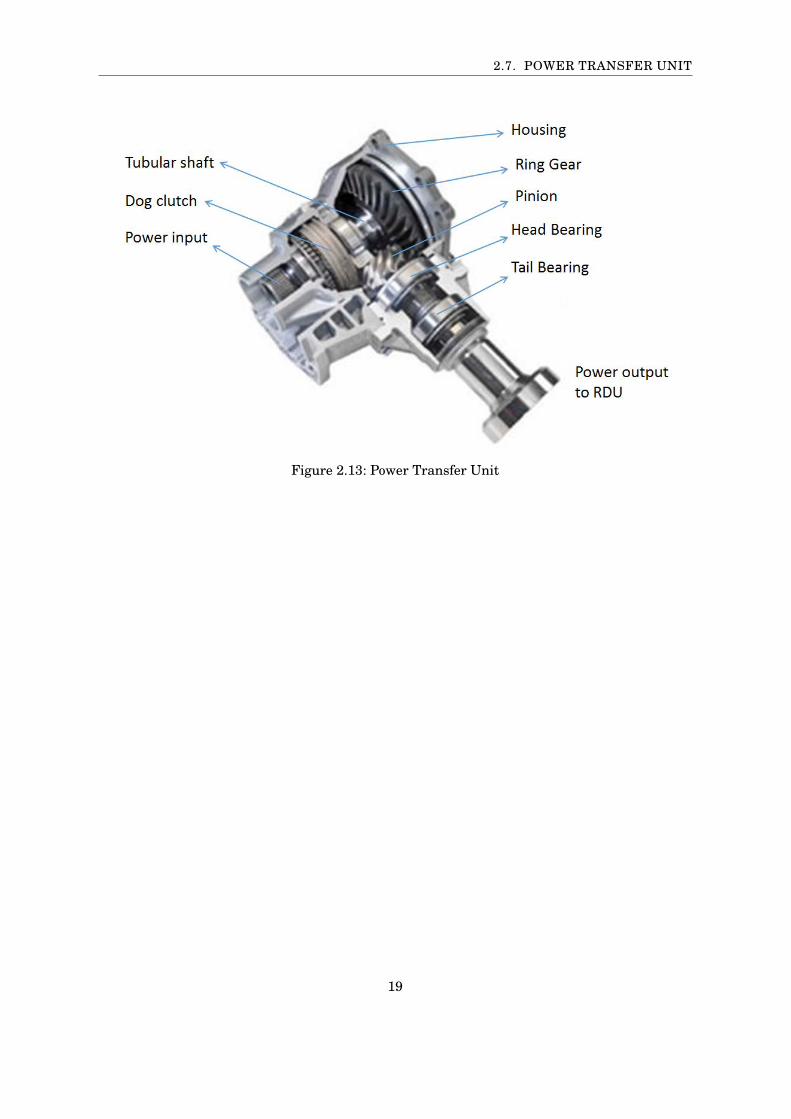
Power transfer unit is the device which will be modelled in this thesis and a brief explanation
about the functionality of this device is given here, see fig. 2.13
Power transfer unit is a device that is installed in AWD vehicle Driveline to control the power
supply to the rear drive unit. The control unit makes decision as to when the power needs
to supplied to the RDU. The power input to PTU is from the transmission unit, clutch plays
an important role in transferring this power to tubular shaft when it is engaged. The power
then flows to ring gear, pinion and finally to RDU via prop shaft. The head and tail bearing
supports pinion inside the housing similarly the tubular shaft is supported by two bearings. All
the components except clutch is modelled in MSC ADAMS which is discussed in the next chapter.
18
2.7. POWER TRANSFER UNIT
Figure 2.13: Power Transfer Unit
19

Chapter 3
ImplementationThis chapter explains the procedure followed in modeling a system within MBS environment and
also the method to perform a co-simulation with a control tool in order to enhance the efficiency
in simulating the dynamic behavior of a system.
3.1 Modeling Procedure
3.1.1 Geometry and Material Properties
Geometry files of all components were analyzed to simplify the features. Splines, threads, center-
ing holes and logos were removed from the geometry in order to reduce the processing time and
computational time of the simulation. These features do not contribute to the accuracy of results
unless they were specifically considered to be important in the analysis.
The properties such as Young’s modulus, poisson’s ratio and density of the material of all compo-
nents were identified in order to be defined while performing the modal analysis.
Table 3.1: Material of different parts
Part name Material Young’s Modulus [N/mm2] Density [K g/mm3]Pinion Steel 208000 7.85e-6Ring gear Steel 208000 7.85e-6Tubular shaft Steel 208000 7.85e-6Cover-plate Aluminium alloy 70000 2.75e-6Housing Aluminium alloy 70000 2.75e-6
3.1.2 Generating NASTRAN input file
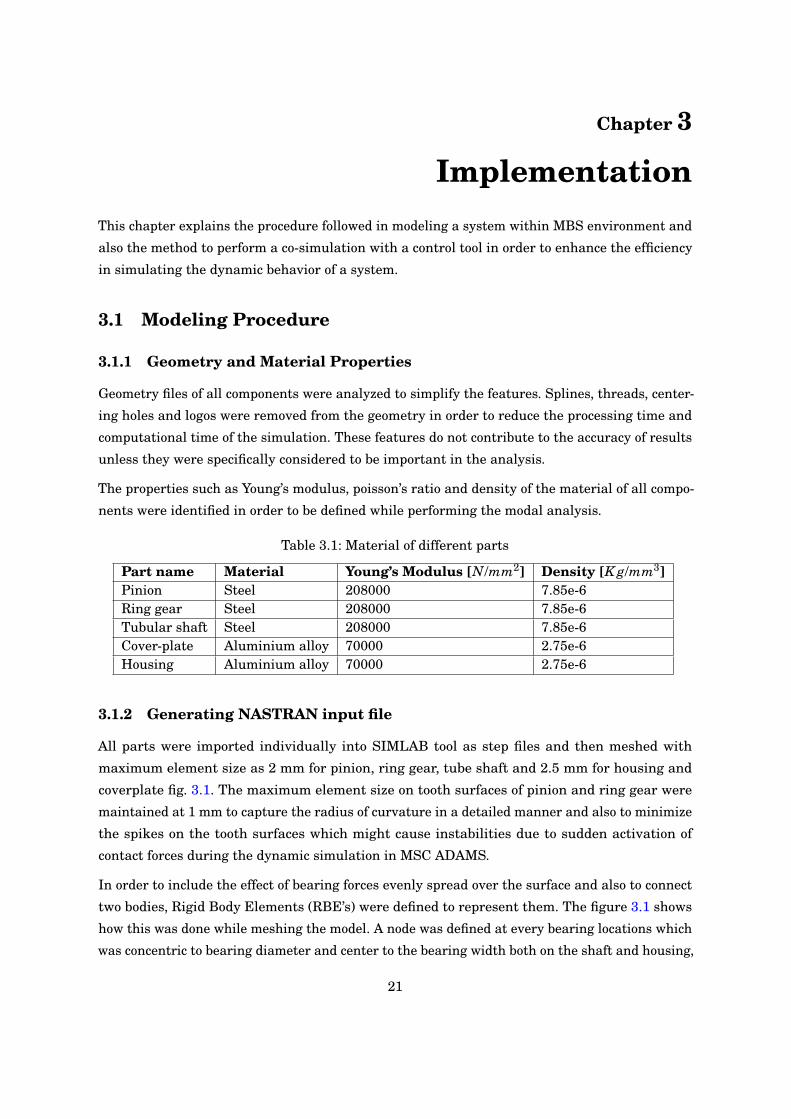
All parts were imported individually into SIMLAB tool as step files and then meshed with
maximum element size as 2 mm for pinion, ring gear, tube shaft and 2.5 mm for housing and
coverplate fig. 3.1. The maximum element size on tooth surfaces of pinion and ring gear were
maintained at 1 mm to capture the radius of curvature in a detailed manner and also to minimize
the spikes on the tooth surfaces which might cause instabilities due to sudden activation of
contact forces during the dynamic simulation in MSC ADAMS.
In order to include the effect of bearing forces evenly spread over the surface and also to connect
two bodies, Rigid Body Elements (RBE’s) were defined to represent them. The figure 3.1 shows
how this was done while meshing the model. A node was defined at every bearing locations which
was concentric to bearing diameter and center to the bearing width both on the shaft and housing,
21

CHAPTER 3. IMPLEMENTATION
then the surface nodes which comes in contact with the race ways of the bearing were selected
and RBE’s were connected to the centre node and selected surface nodes which results in the form
of a spider net. A similar approach was followed for bolt modelling which is explained in detail
under bolt modelling section 3.2.6. The meshed components were then exported as NASTRAN
input files to perform Modal analysis in NASTRAN-PATRAN.
Figure 3.1: Pinion, Tubular shaft, Ring gear, Housing and Cover-plate
22

3.2. MBS ENVIRONMENT - MSC ADAMS
3.1.3 Generating Modal Neutral File
The NASTRAN input files were imported into PATRAN individually, attachment node set for
each of them was defined for "component mode synthesis" as per Craig-Bampton method. For
this, NASTRAN specific commands called ’QSET’ and ’ASET’ were used in order to define the
attachment node set and the constraints on their DOF respectively. The first 20 modes excluding
the rigid body modes of every individual components were captured.
MSC ADAMS understands the flexible behavior of components in the form of dynamic submodel
from CMS as Modal Neutral File (MNF), prior to performing the modal analysis in PATRAN the
output file format was set to MNF in which the modal behavior of a component was stored as
Craig Bampton Modes.
3.2 MBS Environment - MSC ADAMS
3.2.1 Importing Flexible body in ADAMS
All components in the form of MNF were imported into ADAMS, by doing so, ADAMS automati-
cally detects and removes the rigid body modes of the components and takes only the flexible
modes into account. The "Partial" inertia coupling method in ADAMS was used to represent the
flexible bodies, more information about the coupling methods can be seen under 2.6.3 and the
default mode for damping was applied which means the damping was 1%, 10%, 100% of critical
damping for modes of frequency <100Hz, 100 to 1000Hz and >1000Hz respectively.
3.2.2 Unit system
The unit system that was followed through out the modeling and simulation procedure was
MMKS with length in millimeter, mass in kilogram and time in second.
3.2.3 Joints
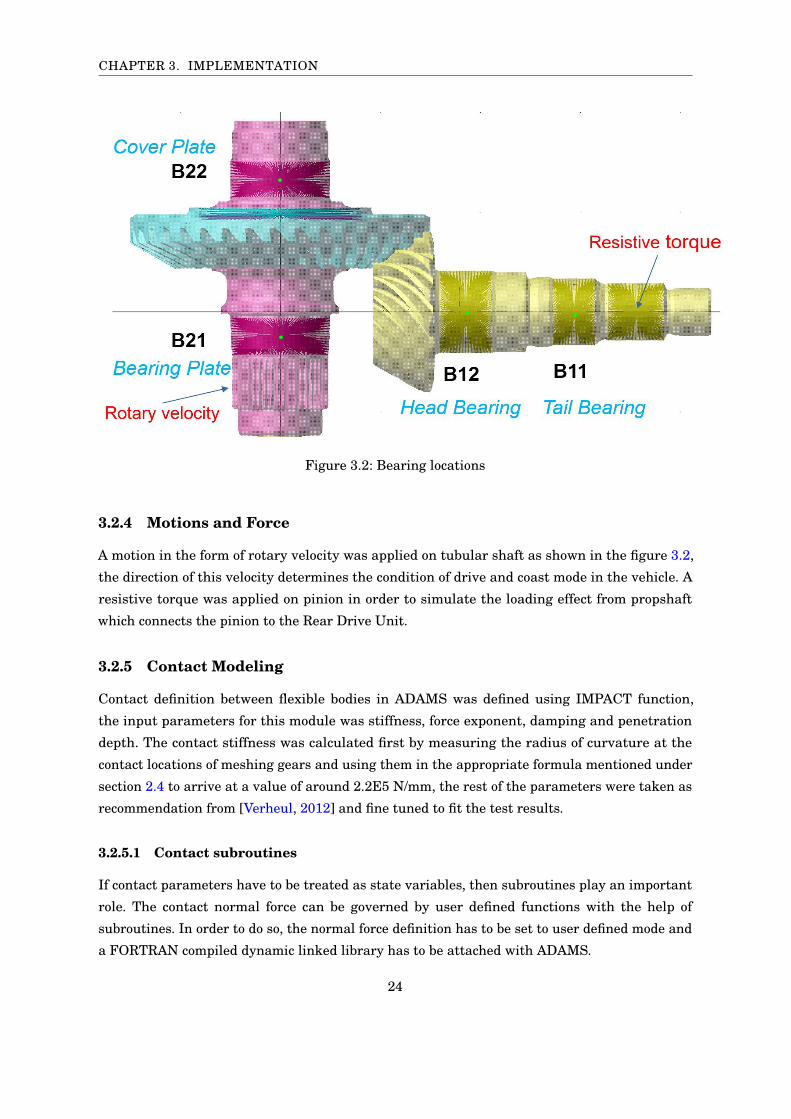
The constraints between parts were defined in ADAMS with the help of joints, in this case there
were four rotary joints; two between pinion-housing and two between tubular shaft - housing as
shown in the figure 3.2, there were bolt joints between coverplate - housing, housing - ground,
and coverplate - ground.
The head bearing and tail bearing were located in housing where as the ’B22’ bearing was located
in coverplate and ’B21’ bearing was located inside the housing. The Ring gear was rigidly fixed
to the tubular shaft which was done by joining the RBE spider center node of ring gear with
that of tubular shaft. The housing and coverplate connection is explained in the bolt modelling
procedure section 3.2.6
23
CHAPTER 3. IMPLEMENTATION
Figure 3.2: Bearing locations
3.2.4 Motions and Force
A motion in the form of rotary velocity was applied on tubular shaft as shown in the figure 3.2,
the direction of this velocity determines the condition of drive and coast mode in the vehicle. A
resistive torque was applied on pinion in order to simulate the loading effect from propshaft
which connects the pinion to the Rear Drive Unit.
3.2.5 Contact Modeling
Contact definition between flexible bodies in ADAMS was defined using IMPACT function,
the input parameters for this module was stiffness, force exponent, damping and penetration
depth. The contact stiffness was calculated first by measuring the radius of curvature at the
contact locations of meshing gears and using them in the appropriate formula mentioned under
section 2.4 to arrive at a value of around 2.2E5 N/mm, the rest of the parameters were taken as
recommendation from [Verheul, 2012] and fine tuned to fit the test results.
3.2.5.1 Contact subroutines
If contact parameters have to be treated as state variables, then subroutines play an important
role. The contact normal force can be governed by user defined functions with the help of
subroutines. In order to do so, the normal force definition has to be set to user defined mode and
a FORTRAN compiled dynamic linked library has to be attached with ADAMS.
24

3.2. MBS ENVIRONMENT - MSC ADAMS
Figure 3.3: Contact definition
The CNF subroutine allows to control the contact parameters such as stiffness, force exponent,
damping and penetration depth. The CFF subroutine helps to control the contact frictional
parameters. Although, a simulation was set up to vary the contact stiffness dynamically based on
the variation of surface characteristics on tooth flank, it took significantly more time to solve and
accuracy of result was affected.
The reason behind this was, MSC ADAMS has to continuously exchange data with .dll file in
order to generate the normal force and apart from that, the automatic intermediate steps to
compute normal force when the contact is detected was lacking while using subroutines which
demands the simulation error tolerance to be set to a lower value.
3.2.6 Bolt modeling
Bolt stiffness has significant effect on the behavior of a system, which means there is a difference
in the dynamic response with two mounting points fixed together and the dynamic response with
a stiffness definition between them. In this model there were 15 bolts used to hold the entire
assembly in place, the table 3.2 shows the bodies that were coupled together with these bolts.
The tubular shaft was supported by two bearings, one bearing was located inside the housing and
the other one was located in the Cover plate, which makes it important to define bolt stiffness
between these two bodies.
25
CHAPTER 3. IMPLEMENTATION
No. of Bolts Body 1 Body 27 Cover plate Housing6 Housing Ground2 Cover plate Ground
Table 3.2: No. of Bolts between different bodies
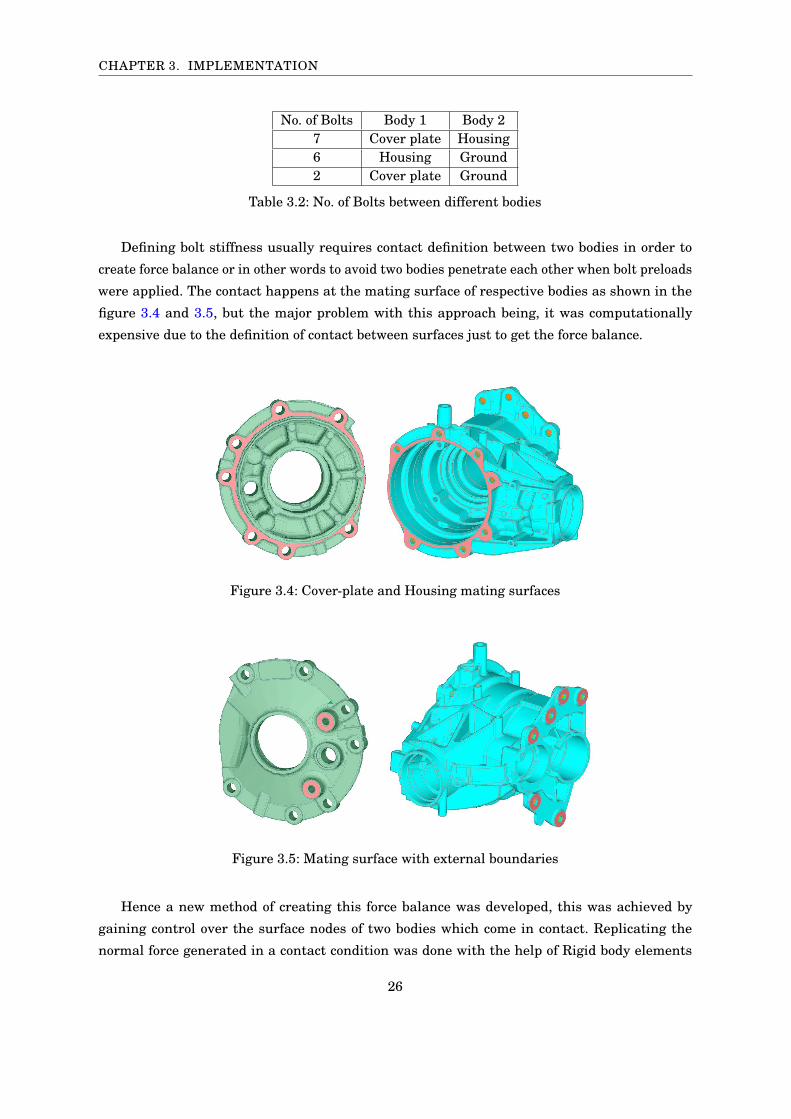
Defining bolt stiffness usually requires contact definition between two bodies in order to
create force balance or in other words to avoid two bodies penetrate each other when bolt preloads
were applied. The contact happens at the mating surface of respective bodies as shown in the
figure 3.4 and 3.5, but the major problem with this approach being, it was computationally
expensive due to the definition of contact between surfaces just to get the force balance.
Figure 3.4: Cover-plate and Housing mating surfaces
Figure 3.5: Mating surface with external boundaries
Hence a new method of creating this force balance was developed, this was achieved by
gaining control over the surface nodes of two bodies which come in contact. Replicating the
normal force generated in a contact condition was done with the help of Rigid body elements
26

3.2. MBS ENVIRONMENT - MSC ADAMS
(RBE) as shown in the figure 3.9. If we consider a mating surface of a particular body, then RBEs
were defined between the surface nodes of this mating surface and a single node which was away
from the surface by a certain distance. This helps us to gain control over surface nodes through
which we can define boundary conditions.
Figure 3.6: Cover-plate mating surface nodes connected to a single node through RBEs
Figure 3.7: Housing mating surface nodes connected to a single node through RBEs
In this case the mating surface nodes of housing and cover-plate were connected via RBEs to
their respective single node which was at a certain distance from the mating plane, farther this
single node from the mating plane better was the normal force on the contacting bodies. At last
27

CHAPTER 3. IMPLEMENTATION
both "single nodes" of two contacting bodies were fixed together as shown in the figure 3.8. The
concept of this procedure for a single bolting region is explained in the figure 3.9
Figure 3.8: Two components in place with their single node connected to each other
Figure 3.9: Conceptual representation of a single bolting region
28

3.2. MBS ENVIRONMENT - MSC ADAMS
All mounting holes have a centre node which was connected by RBEs to the nodes on the
threaded region in case of threaded holes or to the nodes of bolt-head seating surface in case of
clearance holes as shown in the figure 3.10
Figure 3.10: Illustration of connecting two centre nodes with a bolt
3.2.6.1 Bolt stiffness and damping calculation
The bolt stiffness can be approximately calculated with the following formulation:
(3.1) K = AEL
where,
A = Area of cross section of bolt
E = Young’s modulus of the material
29

CHAPTER 3. IMPLEMENTATION
L = Shank length of the bolt
A rough calculation on the stiffness gives a value of around 5e5 N/mm to 6e5N/mm. To have
an idea on the damping co-efficient of the bolt, it’s mass was calculated which was 20.52g and
assuming 50 percent contribution to the stiffness, a mass of 10g can be considered to calculate
the first natural frequency and an estimate on its damping.
(3.2) Natural f requency, ωn =√
Km
(3.3) CriticalDamping, Cc = 2 m ωn
The structural damping can be around 2 percent of critical damping [Gaul u.a., 2008] and with
that a 0.1 Ns/mm of damping co-efficient can be estimated. Both the calculated stiffness and
damping values were in the agreeable range as mentioned in [Tsai u.a., 1988].
3.2.6.2 Defining Bolt Stiffness in ADAMS
In ADAMS "S-Force" with stiffness and damping characteristics was defined between two center
nodes of a particular mounting region. With this definition the bolt stiffness and damping
properties were taken into account eqn 3.4. Bolt pre-load was incorporated by defining a constant
force value within the "SForce" equation. The equation 3.4 is an illustration of how a bolt was
defined using the two markers of different bodies (two center nodes in this case) which can be
connected via stiffness damping and preload values.
(3.4) Fb = Kb dx + Cdxdt
+ Preload
where,
Fb = bolting force
Kb = bolt stiffness
dx = change in distance between two connected nodes
C = bolt damping co-efficientdxdt = rate of change of distance between two nodes
3.2.6.3 Defining Sensors
Sensors in ADAMS were defined to evaluate and store the value of a particular expression during
a specific instant of time which can be utilized later in the model . In this case defining sensors
was a requirement to model the bolting effect in a proper manner, the main reason being elastic
deformation of the bodies when bolt preload was applied.
30

3.2. MBS ENVIRONMENT - MSC ADAMS
Figure 3.11: Defining Sensors in ADAMS
Force due to bolt stiffness was generated only when there was a change in the distance
between two connected nodes. As bolt preload was applied during the initial stage of simulation
two connected nodes used to come closer due to the flexible nature of bodies, this created an
unwanted spring force between the two nodes in the opposite direction that reduced the preload
value to some extent. Hence the unwanted spring force was reset to zero by measuring the elastic
deformation of two nodes with the help of sensors and from there on the spring force would be
generated as it should be in reality.
3.2.7 Bearing stiffness
In ADAMS model, bushings were defined in order to include the compliance effect of bearings
at specific locations. The bushing module definition in ADAMS had an option to input 6 DOF
(3 translation and 3 rotation) stiffness and damping properties between two bodies, along with
preload values for each DOF. This makes it convenient to model bearings by defining 5 DOF
31

CHAPTER 3. IMPLEMENTATION
stiffness and damping properties, setting the rotational axis stiffness and damping to zero as
shown in the figure 3.12.
Figure 3.12: Defining Bushings in ADAMS
The inputs for stiffness values were from a specific tool, which was efficient in estimating
the bearing stiffness for a given load. Although stiffness of the bearing is non linear and load
dependent, a fair approximation should give better results. As explained there were four bearings
in the model, each of them having specific stiffness value depending on their configuration and
type.
3.3 Models built in MSC ADAMS
3.3.1 Hypoid Gear Pair Model
Hypoid gear pair model includes tubular shaft, ring gear and pinion. The main purpose of this
model was to simulate the experimental set up in Gleason 600HTT tester machine, which was
used to measure the transmission error of an hypoid gear set. The boundary conditions were
defined similar to how the components were mounted in the testing machine. The pinion and
tubular shaft were connected to the ground via revolute joint this replicates the conditions of
holding the components in the chuck of the tester machine. A torque was defined on the pinion in
a direction opposite to its rotation so as to generate the resistive load and for the tubular shaft a
specific rotational velocity was defined. This was followed by defining the contact between pinion
and ring gear. The model is shown in the figure 3.13.
32

3.3. MODELS BUILT IN MSC ADAMS
Figure 3.13: Hypoid gear pair model
3.3.2 Complete Model
The complete model includes pinion, ring gear, tubular shaft, housing and cover-plate fig 3.14.
There are four bearings in the real product which were modelled as bushings as explained in
3.2.7. The bolt stiffness was incorporated in the model as explained in 3.2.6.
The contact conditions between Pinion and Ring Gear for complete model were defined as follows:
Stiffness 2e5 N/mmExponent 3Damping 60 Ns/mm
Penetration Depth 0.03 mm
Table 3.3: Contact Parameters
33

CHAPTER 3. IMPLEMENTATION
Figure 3.14: Complete model of PTU
As explained, the method of bolting the parts together was responsible to hold the structure
intact. But the activation of these bolt preloads and bolt stiffness properties need to be defined
carefully. For example if all the bolt preloads connecting the housing were activated at the same
instant then, it would cause simulation errors due to force convergence problem. So the activation
of bolt preloads were defined as how the product was assembled in reality. The sequence is
34

3.4. SIMULINK-ADAMS CO-SIMULATION
described in the table 3.4.
Table 3.4: Activation Sequence of Bolt Preload
Time (sec) Sequence of Events0 – 0.1 Bolt preload, Cover-plate and Housing0.1 - 0.2 Bolt preload, Housing and Ground0.2 - 0.3 Bolt preload, Cover-plate and Ground0.5 Activation and Evaluation of Sensors0.5 - 0.6 Stiffness definition for all Bolts0.9 - 1 Resistive Torque applied on the pinion
3.3.3 Solver settings and Simulation Parameters
Different solver settings in MSC ADAMS and their capabilities in solving the dynamic equations
of a similar system was studied in [Stefano.Orzi, 2016]. Based on that, solver settings were
chosen as shown in the table 3.5. The solver executable threads were set to 8 which utilizes the
maximum CPU capabilities.
Table 3.5: MSC ADAMS Solver settings
Integrator GSTIFFError tolerance 1e-3
Formulation I3Corrector Original
3.4 SIMULINK-ADAMS Co-simulation
Co-simulation is a technique which involves integrating two or more tools to increase the perfor-
mance and flexibility of a simulation. In this thesis, a co-simulation between MSC ADAMS and
SIMULINK was established in order to explore optimization methods for developing the product
and also creating an option for future to test control strategies. This can be developed to combine
multiple mechanical and electrical systems.
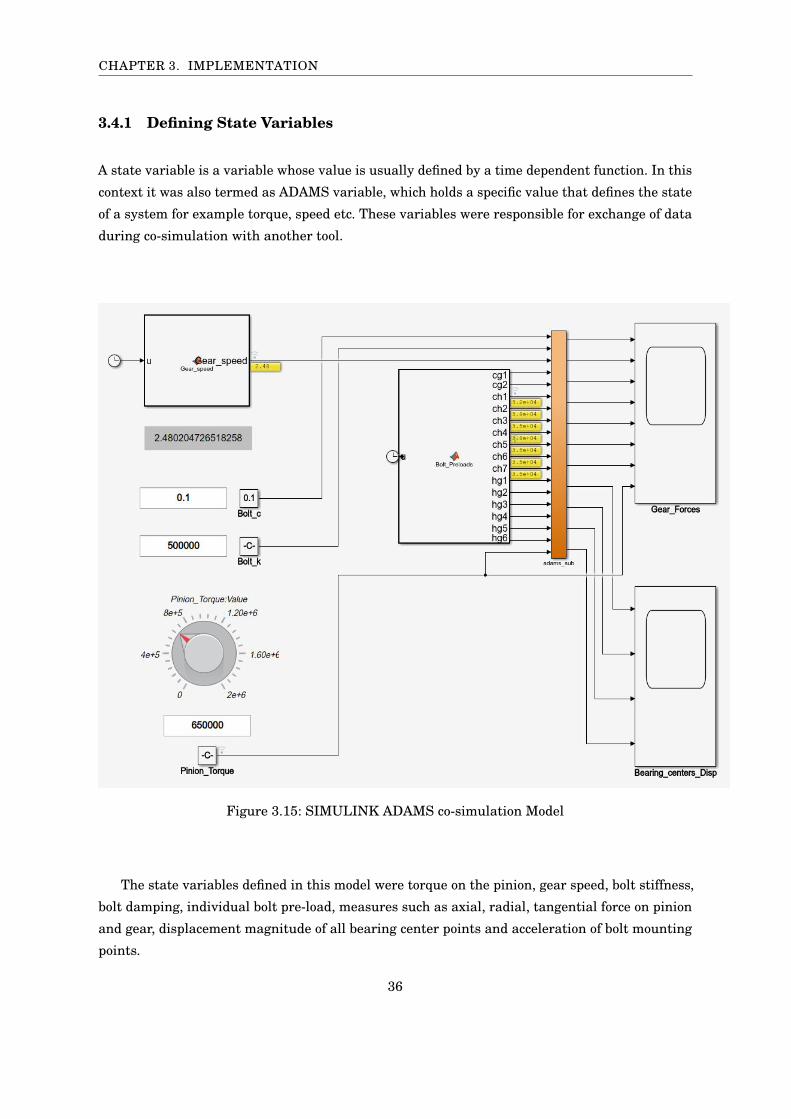
The figure 3.15 shows the co-simulation that was set up. The "adams sub" block represents the
complete model of PTU. An optimization block for bolt preloads was set up in this case. There
were two scopes(graphical window) in this model one with the name Gear force where the forces
on gear bodies were plotted instantaneously as the simulation was running and the other scope
with name Bearing centre disp. showed the plot of bearing point displacement magnitude. The
simulation was basically to set a unique bolt preload values between coverplate and housing
each second and the effect of that on the bearing centre displacement was observed. This was
performed for 57 different combination of bolt preloads as a part of DOE.
35
CHAPTER 3. IMPLEMENTATION
3.4.1 Defining State Variables
A state variable is a variable whose value is usually defined by a time dependent function. In this
context it was also termed as ADAMS variable, which holds a specific value that defines the state
of a system for example torque, speed etc. These variables were responsible for exchange of data
during co-simulation with another tool.
Figure 3.15: SIMULINK ADAMS co-simulation Model
The state variables defined in this model were torque on the pinion, gear speed, bolt stiffness,
bolt damping, individual bolt pre-load, measures such as axial, radial, tangential force on pinion
and gear, displacement magnitude of all bearing center points and acceleration of bolt mounting
points.
36

3.4. SIMULINK-ADAMS CO-SIMULATION
3.4.2 Exporting ADAMS control Plant
ADAMS control plant export was a step to specify the input and output variables of the ADAMS
system block that will be later used in the co-simulation environment. This step also requires
specifying the target software which in this case was MATLAB. Initialization command can be
used to initialize certain variable value before the start of co-simulation.
3.4.3 Simulation parameters in SIMULINK
An ODE15s (stiff/NDF) solver was used in SIMULINK to perform the co simulation, animation
mode was set to batch and simulation mode being discrete which means the control equations
are solved by SIMULINK and mechanical system equations were solved by ADAMS solver in the
background.
Figure 3.16: SIMULINK Solver settings
37


Chapter 4
Results and DiscussionIn this chapter, the results obtained from the simulation of various models are discussed.
4.1 Forces on Hypoid Gears
4.1.1 Analytical results
The three mutually perpendicular gear body forces namely axial, radial and tangential force that
are acting on the hypoid gear sets can be calculated for any given torque using the analytical
formulae. The same has been calculated for two torque levels i.e. 650Nm and 1343Nm acting on
the pinion which corresponds to 1646.6Nm and 3402.2 Nm on Gear side. The analytical results
are shown in table 4.1 & 4.2.
Table 4.1: Forces acting on Pinion
Torque (Nm) Axial Force (N) Radial Force (N) Tangential Force (N)650 20722 2301 216081343 42941 5093 44540
Table 4.2: Forces acting on Ring gear
Torque (Nm) Axial Force (N) Radial Force (N) Tangential Force (N)1647 659 14531 262683402 1297 30382 54120
4.1.2 MSC ADAMS Simulation results
ADAMS simulation was performed with a pinion torque of 650 Nm maintaining its rotational
speed at 60 rpm. The forces acting on the gear bodies is shown in fig 4.1 to fig 4.6. It is important to
note that the torque was zero till 0.9 sec and was taken to the desired level within the simulation
time frame of 0.9 to 1 sec. As explained before the delay in application of torque was because of
the bolt preload and stiffness activation within simulation time span of 0 to 0.9 second. The blue
dashed line in the below figures represents the analytical value for the same.
The comparison between analytical and simualtion results shows a good correlation of forces
acting on the gear bodies, but still there was an error of some percentage depending on the
magnitude of forces. This can be attributed to the fact that analytical formulae considers a
constant pitch circle diameter which is not the same in reality and also the angle used to resolve
the force components might vary since the tooth surfaces are not smooth enough.
39

CHAPTER 4. RESULTS AND DISCUSSION
Figure 4.1: Pinion Axial Force
Figure 4.2: Pinion Radial Force
Figure 4.3: Pinion Tangential Force
40

4.1. FORCES ON HYPOID GEARS
Figure 4.4: Gear Axial Force
Figure 4.5: Gear Radial Force
Figure 4.6: Gear Tangential Force
41

CHAPTER 4. RESULTS AND DISCUSSION
4.2 Transmission Error (TE)
The TE was computed by measuring the difference between the angular position of pinion
calculated based on ring gear rotation and actual angular position of the marker on the pinion
where resistive torque was applied. The fig 4.7 shows TE signal that was measured from the
simulation with a specific Gear torque and specific Pinion rotational speed. This particular
simulation setting is similar to the End of Line (EOL) test that was performed at the test rig once
the complete product was assembled.
Figure 4.7: Transmission Error (1 to 2 sec)
The interesting part of Fast Fourier transform (FFT) of TE signal is to observe the amplitude of
the signal at the meshing frequency which is defined as the no. of teeth on pinion/gear multiplied
by the base rotational speed of pinion/gear in rps respectively. Since, the pinion had a specific
no. of teeth a certain rotational speed would give us the fundamental frequency also called as
meshing frequency and its first harmonic which is twice the fundamental frequency, typically
major part of the TE disturbance will be concentrated in the base meshing frequency and the
amplitude usually decreases with higher orders and dies out.
In the figure 4.8 it can be seen that the TE at fundamental frequency is around 27.5 micro-radian
and at first harmonics it is around 8 micro-radian. The contact conditions and simulation settings
are mentioned in the table 4.3.
ADAMS Solver GSTIFFError tolerance 1e-3Inertia coupling PartialContact stiffness 2e5 (N/mm)
Exponent 3Damping 60 (Ns/mm)
Penetration depth 0.03 (mm)
Table 4.3: Settings - Simulation and Contact parameters
42

4.2. TRANSMISSION ERROR (TE)
Figure 4.8: FFT of Transmission Error signal (1 to 2 sec)
4.2.1 TE - Hypoid gear set level
This simualtion was performed at a gear set level with pinion, ring gear and tubular shaft. The
settings used for this simulation was same as used for the above full model but, only change was
the torque on the gear. The TE obtanied from the ADAMS simulation is shown in fig 4.9 and fig
4.10.
Figure 4.9: Transmission Error - Hypoid gear set level
Figure 4.10: FFT of TE signal - Hypoid gear set level
43

CHAPTER 4. RESULTS AND DISCUSSION
This simulation was similar to the TE test rig set up. In the figure 4.10 it can be seen that the
TE at fundamental frequency is around 25.17 micro-radian and at first harmonics it is around
8.4 micro-radian, which goes on decreasing at higher orders.
4.2.2 EOL and TE Test Rig - Test results
The End of Line test was carried out in a test rig which measures the TE of the complete
assembled unit at the end of assembly line and the test results are shown in table 4.4. It is
important to note that the TE measured in this test rig is from zero to peak which means its
amplitude is comparable to the amplitude of TE signal in ADAMS simulation.
Frequency [Hz] Test [u-rad] Simulation [u-rad]Fundamental 28 27.5
First harmonic 5 8
Table 4.4: EOL test results
The hypoid gear set level test was carried out in TE tester machine, which was designed to
measure TE of a given hypoid gear pair. The TE measured in this machine was peak to peak
which means 50 percent of its amplitude corresponds to the TE predicted by ADAMS simulation.
The results from the tester machine is shown in table 4.5
Frequency [Hz] Test [u-rad] Simulation [u-rad]Fundamental 26 (13) 25.17
First harmonic 4 (2) 8.4
Table 4.5: TE tester results
4.2.3 Comparing Test and Simulation TE values
The comparison of simulation results with test results shows that the fundamental TE for
complete model is closely matching with test results, where as at first harmonic is slightly
deviating by 3 micro-radian. In case of hypoid gear set level, only 50 percent of test results
(since it is peak to peak) i.e. 13 and 2 micro-radian should be compared with the simulation
results which is not exactly matching, the reason for this could be that the compliance effect of
spindle bearing in tester machine was not included in hypoid gear set model, which is driving the
simulation results higher. More importantly the complete model TE is correlating well with the
test results which is beneficial in many ways.
4.3 Acceleration of Bearing points
The acceleration at bearing points plays an important role in the performance of any drive unit,
lesser the acceleration in those points better it is from NVH perspective, which leads to elongated
44
4.3. ACCELERATION OF BEARING POINTS
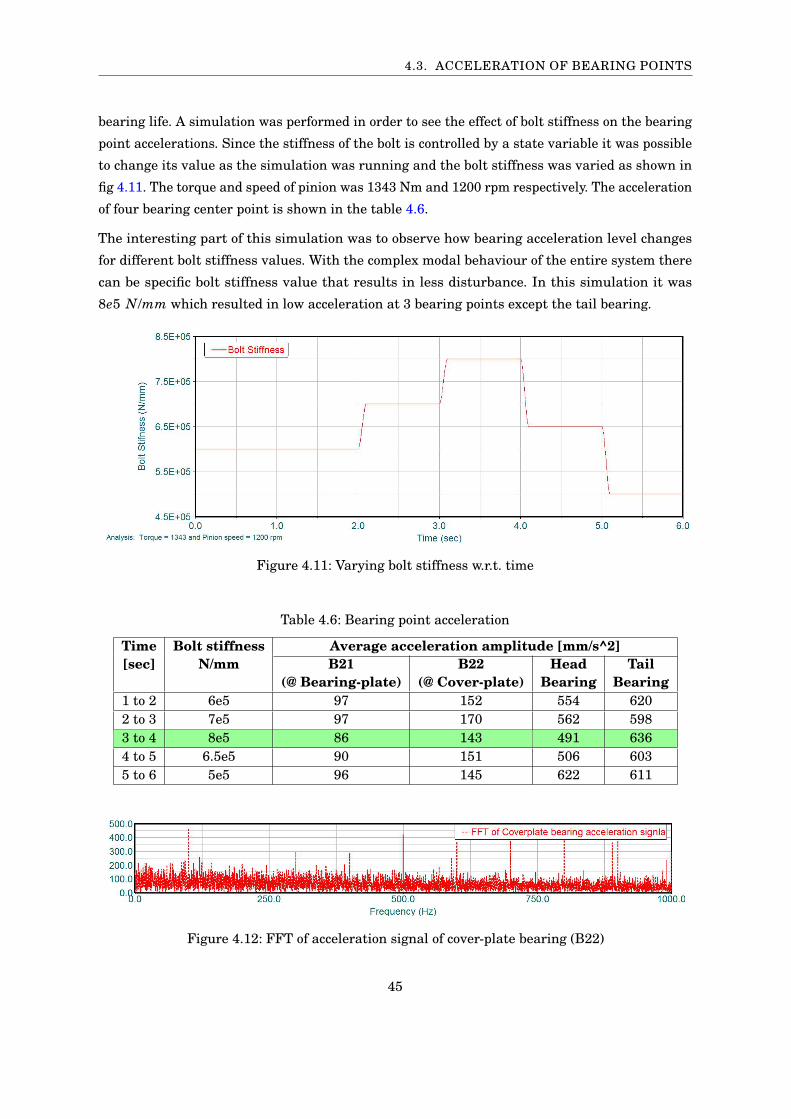
bearing life. A simulation was performed in order to see the effect of bolt stiffness on the bearing
point accelerations. Since the stiffness of the bolt is controlled by a state variable it was possible
to change its value as the simulation was running and the bolt stiffness was varied as shown in
fig 4.11. The torque and speed of pinion was 1343 Nm and 1200 rpm respectively. The acceleration
of four bearing center point is shown in the table 4.6.
The interesting part of this simulation was to observe how bearing acceleration level changes
for different bolt stiffness values. With the complex modal behaviour of the entire system there
can be specific bolt stiffness value that results in less disturbance. In this simulation it was
8e5 N/mm which resulted in low acceleration at 3 bearing points except the tail bearing.
Figure 4.11: Varying bolt stiffness w.r.t. time
Table 4.6: Bearing point acceleration
Time[sec]
Bolt stiffnessN/mm
Average acceleration amplitude [mm/s^2]B21
(@ Bearing-plate)B22
(@ Cover-plate)Head
BearingTail
Bearing1 to 2 6e5 97 152 554 6202 to 3 7e5 97 170 562 5983 to 4 8e5 86 143 491 6364 to 5 6.5e5 90 151 506 6035 to 6 5e5 96 145 622 611
Figure 4.12: FFT of acceleration signal of cover-plate bearing (B22)
45

CHAPTER 4. RESULTS AND DISCUSSION
4.4 Acceleration of mounting points
The results that are important to predict NVH performance of a drive unit are discussed here. Bolt
Acceleration Computation (BAC) and Surface Velocity Levels (SVL) are some of the important
measures to analyse the NVH Performance of a particular system [Selmane u.a., 2004]. These
measures also play an important role in the development of a product for better NVH performance
relative to a reference product.
The bolt joints’ acceleration between cover-plate and housing were analyzed in this case, but
this analysis can be extended to other mounting points in order to improve the complete system.
The bolt joints acceleration results were taken from the same simulation that was performed
in case of bearing point acceleration mentioned in section 4.3. The table 4.7 shows bolt joints’
acceleration between cover-plate and housing. This acceleration has been measured at markers
on the cover-plate to which one end of the bolt was connected.
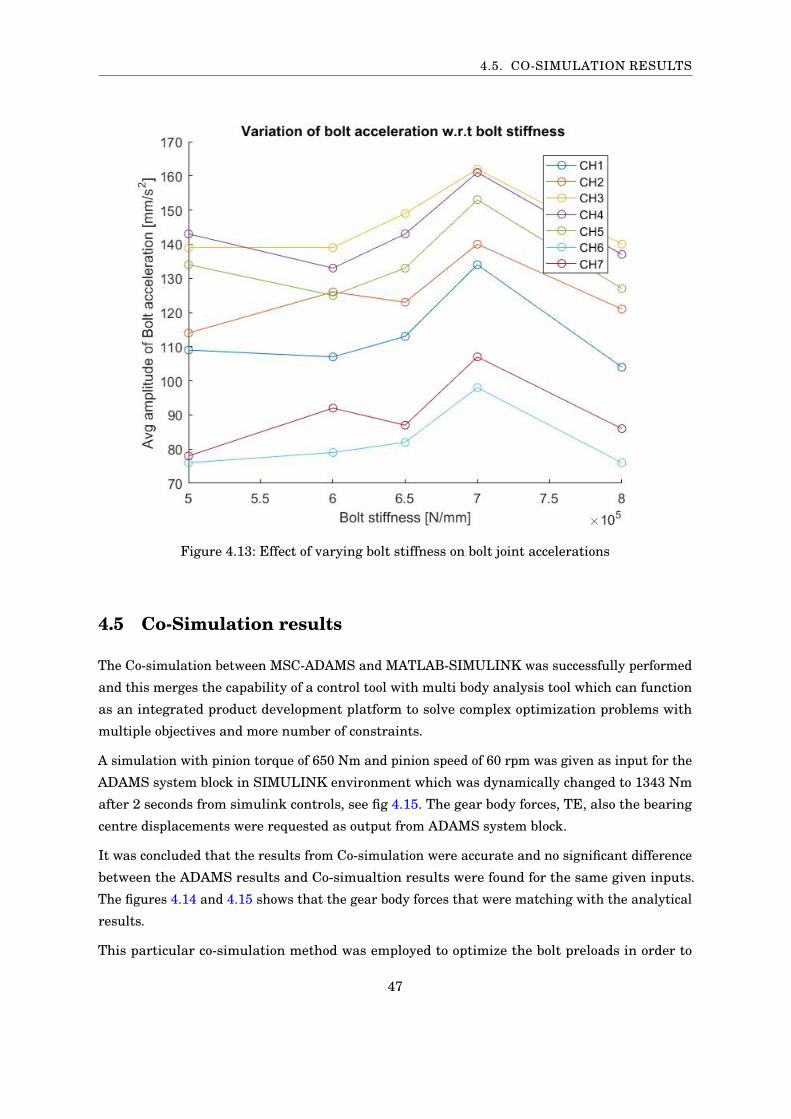
Table 4.7: Bolt Joint Accelerations
Avg. acceleration amplitude [mm/s^2]Time[sec]
Bolt stiffness[N/mm] CH1 CH2 CH3 CH4 CH5 CH6 CH7
1 to 2 6e5 107 126 139 133 125 79 922 to 3 7e5 134 140 162 161 153 98 1073 to 4 8e5 104 121 140 137 127 76 864 to 5 6.5e5 113 123 149 143 133 82 875 to 6 5e5 109 114 139 143 134 76 78
** CH1 stands for cover plate-housing bolt number 1 and there are seven bolts securing
coverplate to housing, hence CH1 to CH7
From the table 4.7 it can be clearly concluded that average acceleration values were affected
by varying the bolt stiffness and there is no direct relation as such between them since it is a
combined effect of various stiffness in the system. A specific bolt stiffness value of 8e5 N/mm has
a minimizing effect on the overall acceleration levels in case of bolted joints, although it was not
the lowest level for individual case but was still relatively low fig. 4.13
This method of analysing bolt accelerations and bearing point accelerations definitely has a
potential to tune a specific product for better performance in terms of NVH by just making some
minor modifications to the bolt stiffness value. It would be interesting to analyse the effect of
varying individual bolt stiffness.
The further development in this regard is to analyze the effect of varying bearing preloads, bolt
preloads and the combined effect of these on the NVH performance of the system. Since the
optimisation process becomes complicated to be only handled by ADAMS, a co-simulation might
be a better option.
46
4.5. CO-SIMULATION RESULTS
Figure 4.13: Effect of varying bolt stiffness on bolt joint accelerations
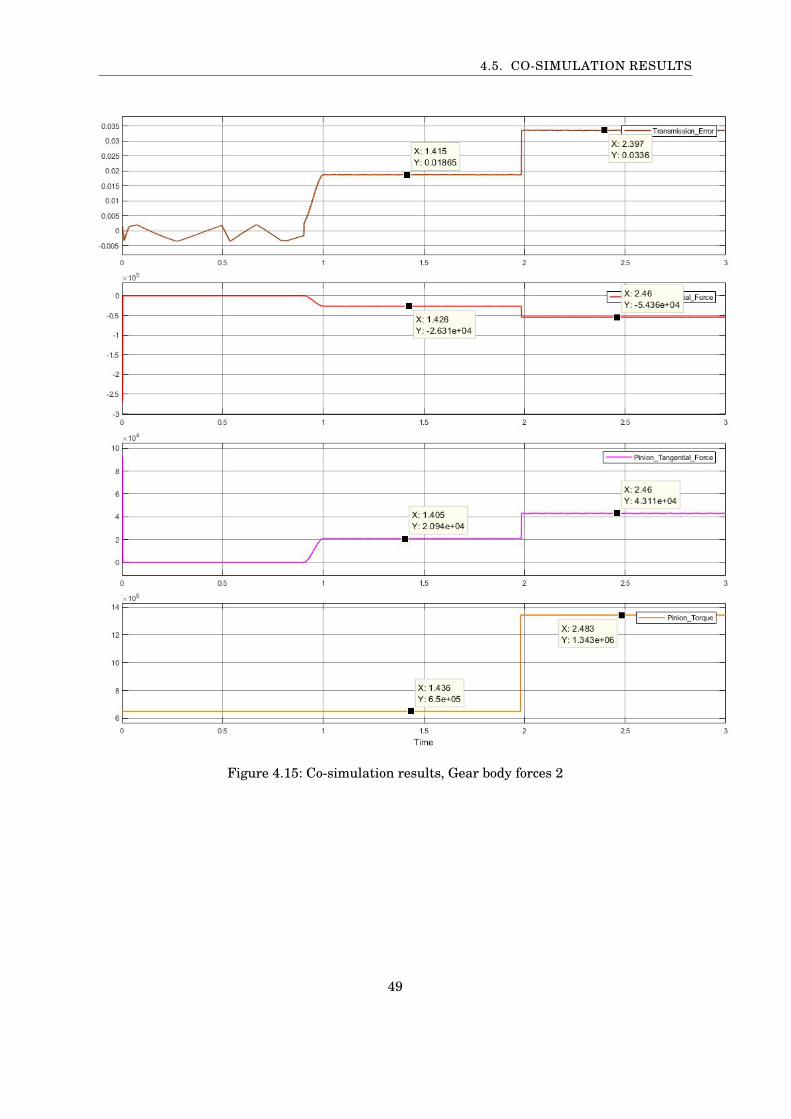
4.5 Co-Simulation results
The Co-simulation between MSC-ADAMS and MATLAB-SIMULINK was successfully performed
and this merges the capability of a control tool with multi body analysis tool which can function
as an integrated product development platform to solve complex optimization problems with
multiple objectives and more number of constraints.
A simulation with pinion torque of 650 Nm and pinion speed of 60 rpm was given as input for the
ADAMS system block in SIMULINK environment which was dynamically changed to 1343 Nm
after 2 seconds from simulink controls, see fig 4.15. The gear body forces, TE, also the bearing
centre displacements were requested as output from ADAMS system block.
It was concluded that the results from Co-simulation were accurate and no significant difference
between the ADAMS results and Co-simualtion results were found for the same given inputs.
The figures 4.14 and 4.15 shows that the gear body forces that were matching with the analytical
results.
This particular co-simulation method was employed to optimize the bolt preloads in order to
47

CHAPTER 4. RESULTS AND DISCUSSION
minimise the displacement of bearing centers. A DOE was setup to change the bolt preloads
between cover-plate and housing from a nominal value of 3.5e4 by a value of +2e3 and-2e3 as two
levels. Therefore for every second the seven bolts between coverplate and housing had a unique
preload value differing slightly from the nominal value. It can be seen in the figure 4.16 that,
even though the variation in bolt preloads had an effect on the bearing point displacement it
was negligibly small i.e. less than 1 micron difference between each trial every second and hence
it was concluded that a different criteria has to be followed to optimize bolt preloads such as
comparing bearing point accelerations instead of bearing point displacement.
Figure 4.14: Co-simulation results, Gear body forces 1
48
4.5. CO-SIMULATION RESULTS
Figure 4.15: Co-simulation results, Gear body forces 2
49

CHAPTER 4. RESULTS AND DISCUSSION
Figure 4.16: Effect of varying bolt preloads on Bearing center displacement, x-axis representssimulation time in seconds and y axis represents the displacement magnitude from global originin mm
4.6 Transient behavior of the system
A simulation of the complete model was performed with a constant pinion torque of 1343 Nm,
varying pinion speed from 0 to 4800 rpm in 0 to 10 sec duration to understand the transient
dynamic behavior of the system. Bearing point accelerations were studied to understand the
transient behavior of the system.
3D fft were plotted as we can analyze the effect of varying pinion speed and also at different time
slice. In figures 4.17 and 4.18, x axis represents frequency content of the variation in a particular
50

4.6. TRANSIENT BEHAVIOR OF THE SYSTEM
entity for example acceleration in bearing B21, y axis represents time slice and z axis represents
the amplitude of signal. Since the torque is not varied the nominal force acting on the gear bodies
remains the same and only power in the drive increases as the simulation time progress.
Figure 4.17: 3D FFT of Bearing B21 acceleration
Figure 4.18: 3D FFT of Bearing B22 acceleration
51

CHAPTER 4. RESULTS AND DISCUSSION
Figure 4.17 and 4.18 shows the variation of bearing point acceleration amplitude with respect
to pinon speed. It can be seen that the acceleration levels are lower at initial stages and higher in
the time range of 7 to 10 seconds since it corresponds to higher power in the drive unit as the
torque is constant and pinion speed is increasing linearly w.r.t time. Due to limitation of time
much analysis could not be made on transient behavior, but can be a potential future work to
study how system responds for sudden change in the inputs.
The deformation plot of the entire model is captured to have a rough idea of what is happening
in the model during the simulation. The figure 4.19 shows the deformation contour, important
areas to observe in this plot are the torque transfer regions gear contact region and bolting region
which gives a visual approximation of the deformation that is happening during the simulation
for a particular torque level.
Figure 4.19: Deformation contour of PTU during simulation
52
Chapter 5
Conclusions and Future workThis chapter mentions the conclusions that were derived from the results and recommends the
possible future work to progress further.
5.1 Conclusions
The thesis was able to model the dynamic behavior of a Power Transfer Unit mounted in an AWD
vehicle, the transmission error predicted by the built model in MSC ADAMS was well within
the agreeable range, the TE of the complete model correlated well with the EOL tests that were
carried out at GKN.
The forces generated on gear bodies for a specific torque during the simulation were matching
with the analytical results, which was an added confirmation that no extremely large force due
to material "dig-in" was happening in the simulation and the model can be effectively used for
further analysis.
A new approach was followed to incorporate bolt stiffness in the model, with which different
studies were carried out by varying the bolt stiffness and analyzing its effect on the acceleration
levels at bearing points and mounting points, since these were crucial from NVH perspective
and used as qualitative measure to predict the performance and durability of a product. Bearing
stiffness and bearing preload were also modelled by using bushing module in MSC ADAMS.
The co-simulation between SIMULINK and ADAMS was set up and this created opportunities
to integrate the capabilities of a control tool with MBS tool in order to create a platform which
can optimize the design space of a model with multiple objectives and complex constraints. The
co-simulation results correlated well with the results obtained from the simulation performed
solely in ADAMS. A co-simulation was performed with different combination of bolt preloads
between cover-plate and housing with a criteria to minimize the bearing point displacement,
although there was an effect of varying bolt preload, it was negligibly small and hence a different
criteria such as bearing point acceleration was recommended to optimise bolt preload.
From this it was concluded that Multi-Body Simulation in ADAMS had potential to predict the
dynamic behavior of a system if all parameters were taken into account. It was also proven that
MBS can be effectively used to optimize the design and this capability can be improved by co
simulating with SIMULINK. Other auxiliary components such as dog clutch and structures can
be attached in co simulation mode which adds flexibility to develop and create complex simulation.
53

CHAPTER 5. CONCLUSIONS AND FUTURE WORK
5.2 Future work
The future work is to incorporate non linearity of bearing stiffness in the model and also to
analyze the effect of varying bearing preloads. Although the transmission error was matching
with EOL test, there was some difference with the hypoid gear set level test which needs to be
understood.
The effect of bolt stiffness on bearing point accelerations and mounting point accelerations needs
to be analyzed in a detail way and should be validated with experimental results. Once it is
accomplished, optimisation could be carried out to find the optimum bolt stiffness and bolt
preloads that meets all the requirement. The new bolt modelling method tried in this thesis has
to be critically evaluated in order to verify its correctness.
The capabilities of ADAMS-SIMULINK co-simulation has to be explored more in order to perform
simulation by coupling auxiliary components such as dog clutch to the main model. Templatizing
the current procedure can be done since that option is available in ADAMS and thus, it can be a
general platform to model similar products with varying designs which will definitely save time.
54

ReferencesTsai, J. S. / Chou, Y. F.(1988): The identification of dynamic characteristics of a single bolt joint, 3:
487–502.
Sellgren, Ulf(2003): COMPONENT MODE SYNTHESIS -A method for efficient dynamic simula-
tion of complex technical systems.
Selmane, Abbas / Felice, Mario / Li, Yingmin(2004): Engine Cylinder Blocks and Heads NVH
Improvements: Bolt Accelerations Computation Methodology.
Gaul, L. / Roseira, J. / Becker, J.(2008): Structural Damping with Friction Beams, 3-4: .
Henriksson.M(2009): On Noise Generation and Dynamic Transmission Error of Gears, PhD
dissertation.
Verheul, Chris(2012): ADAMS methodology for contact modelling.
Wang, Yawen / Lim, Teik / Yang, Junyi(2013): Multi-Point Mesh Modeling and Nonlinear Multi-
Body Dynamics of Hypoid Geared SystemIn: SAE International Journal of Passenger Cars -
Mechanical Systems1127-1132.
Bathe, Klaus Jürgen / Dong, Jian(2014): Component mode synthesis with subspace iterations for
controlled accuracy of frequency and mode shape solutions28 - 32.
Jinli, Xu / Lei, Wan / Wenxin, Luo(2016): Influence of Bearing Stiffness on the Nonlinear Dynamics
of a Shaft-Final Drive System14.
Stefano.Orzi(2016): NVH performance prediction in a Rear Drive Unit.
MSC Software(2017): MSC ADAMS 2017, A Reference Manual, MSC Software.
Craig, Roy R.; Kurdila Andrew J. (2011): Fundamentals of Structural Dynamics. , Wiley.
Johnson, K. L. (1985): Contact Mechanics. , Cambridge University Press.
Klingelnberg, Jan (2016): Bevel Gear: Fundamentals and Applications. Berlin, Heidelberg,
Springer Berlin Heidelberg.
Menday, M. (2010): An introduction to noise and vibration issues in the automotive drivetrain
and the role of tribology. In: Rahnejat, Homer (Hg.), Tribology and Dynamics of Engine and
Powertrain.Woodhead Publishing: 663 - 679.
55


Appendix
Figure 1: Deformation at bolting regions
Figure 2: Coverplate - Housing Bolt acceleration, Bolt stiffness 6e5
57

APPENDIX
Figure 3: Coverplate - Housing Bolt acceleration, Bolt stiffness 7e5
Figure 4: 3D FFT of Head Bearing acceleration
Figure 5: 3D FFT of Tail bearing acceleration
58