draft chapter 9: relationships between points, lines, and
TRANSCRIPT

DRAFT CHAPTER 9: Relationships Between Points, Lines, and Planes Errors will be corrected before printing. Final book will be available August 2008.


Chapter 9
RELATIONSHIPS BETWEEN POINTS, LINES, AND PLANES
In this chapter, we introduce perhaps the most important idea associated withvectors, the solution of systems of equations. In previous chapters, the solution ofsystems of equations was introduced in situations dealing with two equations intwo unknowns. Geometrically the solution of two equations in two unknowns is thepoint of intersection between two lines on the xy-plane. In this chapter, we aregoing to extend these ideas and consider systems of equations in and interprettheir meaning. We’ll be working with systems up to three equations in threeunknowns and will demonstrate techniques for solving these systems.
R3
CHAPTER EXPECTATIONSIn this chapter, you will
• determine the intersection between a line and a plane and between two lines inthree-dimensional space, Section 9.1
• solve systems of equations algebraically involving up to three equations in threeunknowns, Section 9.2
• determine the intersection of two or three planes, Sections 9.3, 9.4
• determine the distance from a point to a line in two- and three-dimensionalspace, Section 9.5
• determine the distance from a point to a plane, Section 9.6
• solve distance problems relating to lines and planes in three-dimensional spaceand interpret the result geometrically, Sections 9.5, 9.6
NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 1

Review of Prerequisite Skills
In this chapter, you will examine how lines can intersect with other lines andplanes, and how planes can intersect with other planes. Intersection problems aregeometric models of linear systems. Before beginning, you may wish to reviewequations of lines and planes.
R E V I E W O F P R E R E Q U I S I T E S K I L L S2 NEL
In the table above:• is the position vector whose tail is located at the origin and whose head is
located at the point in and in • is a direction vector whose components are in and in • and are noncollinear direction vectors whose components are
and respectively in • s and t are parameters where and • is a normal to the line defined by in • is a normal to the plane defined by in
Vector equation of a Line in Vector equation of a Line in
Vector equation of a Plane in Scalar equation of a Plane in R3R3
normal axis
z
x
y
n = (A, B, C)
O
P(x,y,z)
Ax + By + Cz + D = 0
P 0(x0,
y 0,z 0)
p
O
P0
P
z
x
r0 ra
b
y
p
r = r0 + sa + tb
R3R2
Or0
r
m
P(x, y, z)P0(x0, y0, z0)
z
y
L
x
r = r0 + tm , t R[
tm
O
tm
m = (a , b)
rr0
P(x, y)P0(x0, y0)
x
Ly r = r0 + tm , t R[
R3Ax 1 By 1 Cz 1 D 5 01A, B, C 2R2Ax 1 By 1 C 5 01A, B 2
t [ Rs [ RR31b1, b2, b3 2
1a1, a2, a3 2b!
a! R31a, b, c 2R21a, b 2m! R31x0, y0, z0 2R21x0, y0 2
r0!
Lines Planes
Vector Equation r!5 r
!0 1 tm
!r!5 r
!0 1 sa
!1 tb
!
Parametric Equation
z 5 z0 1 tc
y 5 y0 1 tb
x 5 x0 1 ta
z 5 z0 1 sa3 1 sb3
y 5 y0 1 sa2 1 sb2
x 5 x0 1 sa1 1 sb1
Cartesian Equationin three-dimensional space
Ax 1 By 1 C 5 0 Ax 1 By 1 Cz 1 D 5 0
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 2

Exercise
1. Determine if the point is on the given line.
a. ,
b.
c. ,
d. ,
2. Determine the vector and parametric equations of the line passing througheach of the following pairs of points.
a. d.
b. e.
c. f.
3. Determine the Cartesian equation of the plane passing through and perpendicular to
a. d.
b. e.
c. f.
4. Determine the Cartesian equation of the plane that has the vector equation
5. Which of the following lines is parallel to the plane Do any of the lines lie on this plane?
L1: ,
L2: ,
L3:
6. Determine the Cartesian equations of the planes containing the following sets of points.
a.
b.
7. Determine the vector and Cartesian equations of the plane containingand and parallel to the y-axis.
8. Determine the Cartesian equation of the plane passing through that is perpendicular to and 5x 1 y 2 3z 1 6 5 0.2x 2 y 1 3z 2 1 5 0
A121, 3, 4 2Q12, 21, 6 2P11, 24, 3 2
R10, 0, 23 2Q16, 4, 0 2 ,P14, 1, 22 2 ,C16, 21, 5 2B12, 0, 0 2 ,A11, 0, 21 2 ,
x 2 1
45
y 1 6
215
z
1
t [ Rz 5 210ty 5 25 1 2t,x 5 23t,
t [ Rr!5 13, 0, 2 2 1 t11, 22, 2 2
4x 1 y 2 z 5 10?
r!5 12, 1, 0 2 1 s11, 21, 3 2 1 t12, 0, 25 2 .
n!5 11, 1, 21 2P012, 5, 1 2 ,n
!5 14, 23, 0 2P013, 21, 22 2 ,
n!5 111, 26, 0 2P014, 1, 8 2 ,n
!5 10, 7, 0 2P0122, 0, 5 2 ,
n!5 16, 25, 3 2P010, 0, 0 2 ,n
!5 12, 6, 21 2P014, 1, 23 2 ,
n!.
P0
P2112, 25, 27 2P112, 5, 21 2 ,P2123, 211 2P1121, 0 2 ,P2121, 5, 2 2P112, 0, 21 2 ,P214, 27 2P1123, 7 2 ,
P216, 27, 0 2P111, 3, 5 2 ,P217, 3 2P112, 5 2 ,
t [ Rr!5 12, 1, 22 2 1 t14, 21, 2 2P011, 0, 5 2 ,
t [ Rr!5 11, 0, 24 2 1 t12, 21, 4 2P017, 23, 8 2 ,
12x 1 5y 2 13 5 0P011, 2 2 ,t [ Rr
!5 110, 212 2 1 t18, 27 2P012, 25 2 ,
P0
C H A P T E R 9 3NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 3

C A R E E R L I N K4 NEL
RELATIONSHIPS BETWEEN POINTS, LINES, AND PLANES: PIPELINECONSTRUCTION ENGINEER
InvestigateCAREER LINK
Much of the world’s reserves of fossil fuels are found in places that are notaccessible to water for shipment. Due to the enormous volumes of oil that arecurrently being extracted from the ground in places such as northern Alberta,Alaska and Russia, shipment by trucks would be very costly. Pipelines have beenbuilt to move the fuel to a place where it can be processed or loaded onto alarge sea tanker for shipment. The construction of the pipeline itself is a costlyundertaking, but once completed, pipelines save vast amounts of time, energy,and money. A team of pipeline construction engineers is needed to design thepipeline. The engineers have to study surveys of the land the pipeline will crossand choose the best path. Often the least difficult path is above ground, butoften engineers will choose to have the pipeline go below ground. In plottingthe course for the pipeline, vectors can be used to determine if the intendedpath of the pipeline will cross an obstruction or to determine where twodifferent pipelines will meet.
Case Study—Avoiding an Existing Pipe by a Required Distance
New pipelines must be a certain distance away from existing pipelines andbuildings, depending on the type of product the line is carrying. To calculate thedistance between the two closest points on two pipelines, the lines are treatedas skew lines on two different planes (these are lines that never intersectbecause they lie on parallel planes). Suppose an engineer wants to lay a pipeline according to the line There is an existing pipeline that has a pathway determined by
Determine whether the proposedpathway for the new line is less than 2 units away from the existing line.
DISCUSSION QUESTIONS
1. Construct two parallel planes and The first plane contains and asecond intersecting line that has a direction vector of thesame direction vector as The second plane contains and a secondintersecting line that has a direction vector of the samedirection vector as
2. Find the distance between and
3. Write the equation of each line in parametric form.
4. Determine the point on each of the two lines that produces the minimaldistance.
p2.p1
L1.b 5 12, 21, 1 2 ,
L2L2.a 5 11, 22, 0 2 ,
L1p2.p1
t [ R.L2: r 5 11, 0, 1 2 1 t11, 22, 0 2 ,
s [ R.L1: r 5 10, 2, 1 2 1 s12, 21, 1 2 ,
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 4

Section 9.1—The Intersection of a Line with a Plane and the Intersection of Two Lines
We start by considering the intersection of a line with a plane.
Intersection Between a Line and a PlaneBefore considering mathematical techniques for the solution of this problem, weconsider the three cases for the intersection of a line with a plane.
Case 1: The line L intersects the plane at exactly one point, P.Case 2: The line L does not intersect the plane and is parallel to the plane There are no points of intersection.Case 3: The line L lies on the plane There are an infinite number of points ofintersection between the line and the plane.For the intersection of a line with a plane, there are three different possibilities,which correspond to 0, 1, or an infinite number of intersection points. It is notpossible to have a finite number of intersection points other than 0 or 1.These three possible intersections are considered in the following examples.
EXAMPLE 1 Selecting a strategy to determine the point of intersection between a line and a plane
Determine the point of intersection between the lineand the plane
SolutionTo determine the required point of intersection, first convert the line from its vector form to its corresponding parametric form. The parametric form is
Using parametric equations allows for directsubstitution into p.
z 5 2 2 8s.y 5 1 2 4s,x 5 3 1 s,
p : 4x 1 2y 2 z 2 8 5 0.s [ R,L : r!5 13, 1, 2 2 1 s11, 24, 28 2 ,
p.
p.p
C H A P T E R 9 5NEL
L
Case 1. L intersects p at a point.
P p
Case 2. L is parallel to, but not on, p.
p
n
L, direction vector m
L
Case 3. L is on p.
p
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 5

This means that the point where L meets corresponds to a single point on theline with a parameter value of To obtain the coordinates of the requiredpoint, is substituted into the parametric equations of L. The point ofintersection is:
Check (by substitution): The point lies on the plane because
The point that satisfies the equation of the plane and the line is Now we consider the situation in which the line does not intersect the plane.
EXAMPLE 2 Connecting the algebraic representation to the 0 points ofintersection case
Determine the point of intersection between the line
and the plane
SolutionMethod 1Because the line L is already in parametric form, we substitute the parametricequations into the equation for
Since there is no value of t that, when multiplied by 0, gives there is nosolution to this equation. Because there is no solution to this equation, there is no point of intersection. Thus, L and do not intersect. L is a line that lies on aplane that is parallel to .p
p
23,
0t 5 23
4 1 2t 2 10 2 10t 1 9 1 8t 2 6 5 0
212 1 t 2 2 512 1 2t 2 1 19 1 8t 2 2 6 5 0
p.
p : 2x 2 5y 1 z 2 6 5 0.t [ R,z 5 9 1 8t,y 5 2 1 2t,L : x 5 2 1 t,
12, 5, 10 2 .412 2 1 215 2 2 10 2 8 5 8 1 10 2 10 2 8 5 0.
z 5 2 2 8121 2 5 10
y 5 1 2 4121 2 5 5
x 5 3 1 121 2 5 2
s 5 21s 5 21.
p
s 5 21
4s 5 24
12 1 4s 1 2 2 8s 2 2 1 8s 2 8 5 0
413 1 s 2 1 211 2 4s 2 2 12 2 8s 2 2 8 5 0
9 . 1 T H E I N T E R S E C T I O N O F A L I N E W I T H A P L A N E A N D T H E I N T E R S E C T I O N O F T W O L I N E S6 NEL
(By substitution)
(Isolate s)
(By substitution)
(Isolate t)
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 6
Method 2It is also possible to show that the given line and plane do not intersect by firstconsidering which is the normal for the plane, and which is the direction vector for the line, and calculating their dot product. If thedot product is 0, this implies that the line is either on the plane or that the line isparallel to the plane.
We can prove that the line does not lie on the plane by showing that the pointwhich we know is on the line, is not on the plane.
Substituting into the equation of the plane
Since the point does not satisfy the equation of the plane, the point is not on theplane. The line and plane are parallel and do not intersect.
Next, we examine the intersection of a line and a plane where the line lies on theplane.
EXAMPLE 3 Connecting the algebraic representation to the infinite points ofintersection case
Determine the point of intersection of the lineand the plane
SolutionMethod 1As before, we convert the equation of the line to its parametric form. Doing so,we obtain the equations and
Since any real value of s will satisfy this equation, there are an infinite number ofsolutions to this equation, each corresponding to a real value of s. Since any valuewill work for s, every point on L will be a point on the plane, meaning the givenline lies on the plane.
0s 5 0
3 1 14s 2 2 2 5s 1 3 2 9s 2 4 5 0
13 1 14s 2 1 122 2 5s 2 1 311 2 3s 2 2 4 5 0
z 5 1 2 3s.y 5 22 2 5sx 5 3 1 14s,
x 1 y 1 3z 2 4 5 0.s [ R,L : r
!5 13, 22, 1 2 1 s114, 25, 23 2 ,
212 2 2 512 2 1 9 2 6 5 23 Þ 0.12, 2, 9 2
12, 2, 9 2 ,
5 0
5 211 2 2 512 2 1 118 2n! # m
!5 12, 25, 1 2 # 11, 2, 8 2
m!5 11, 2, 8 2 ,n
!5 12, 25, 1 2 ,
C H A P T E R 9 7NEL
(Definition of dot product)
(By substitution)
(Isolate s)
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 7

Method 2Again, this result can be achieved by following the same procedure as in the previous example. If and then
implying that the line and plane areparallel. We substitute the coordinates into the equation of the planeand find that . So this point lies on the plane. Since theline and plane are parallel, and lies on the plane, the entire line lies on the plane.
Next, we consider the intersection of a line with a plane parallel to a coordinateplane.
EXAMPLE 4 Reasoning about the intersection between a line and the yz-plane
Determine the point where andintersect.
SolutionAt the point of intersection, the x values for the line and the plane will be equal.
Equating the two gives or The y and z values for the point of intersection can now be found by substituting into the other two parametric equations. Thus, and
The point of intersection between L and is
Intersection Between Two LinesThus far, we have discussed the possible intersections between a line and a plane.Next, we consider the possible intersection between two lines.
There are four cases to consider for the intersections of two lines in .
Intersecting LinesCase 1: The lines are not parallel and intersect at a single point.Case 2: The lines are coincident, meaning the two given lines are identical.
There are an infinite number of points of intersection.
Non-Intersecting LinesCase 3: The two lines are parallel, and there is no intersection.Case 4: The two lines are not parallel, and there is no intersection. The lines in this
case are called skew lines. (Skew lines do not exist in only in )R3.R2,
R3
123, 14, 26 2 .p26.4 2 215 2 5z 5 4 2 2s 5
y 5 21 1 3s 5 21 1 315 2 5 14s 5 5
s 5 5.2 2 s 5 23,
p : x 5 23s [ R,z 5 4 2 2s,y 5 21 1 3s,L : x 5 2 2 s,
13, 22, 1 23 1 122 2 1 311 2 2 4 5 0
13, 22, 1 2n! # m
!5 1114 2 1 1125 2 1 3123 2 5 0,
m!5 114, 25, 23 2 ,n
!5 11, 1, 3 2
9 . 1 T H E I N T E R S E C T I O N O F A L I N E W I T H A P L A N E A N D T H E I N T E R S E C T I O N O F T W O L I N E S8 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 8

EXAMPLE 5 Selecting a strategy to determine the intersection of two lines in
For anddetermine the point of intersection.
SolutionBefore calculating the coordinates of the point of intersection between the twolines, we note that these lines are not parallel to each other because their directionvectors are not scalar multiples of each other, i.e.,This indicates that these lines either intersect each other or they are skew lines.If these lines intersect, there must be a single point that is on each of the lines. In order to use this idea, the vector equations for and must be converted toparametric form.
L2L1
121, 1, 4 2 Þ k126, 21, 6 2 .
t [ R,L2 : r!5 11, 4, 6 2 1 t126, 21, 6 2 ,
s [ R,L1 : r!5 123, 1, 4 2 1 s121, 1, 4 2 ,
R3
y
z
x
Case 4: Skew lines
y
z
x
Case 3: Parallel lines
y
z
x
Case 2: Coincident lines
y
A
z
x
Case 1: Intersecting lines at a point
C H A P T E R 9 9NEL
These four cases are shown in the diagram below.
L1 L2
x 5 23 2 s x 5 1 2 6t
y 5 1 1 s y 5 4 2 t
z 5 4 1 4s z 5 6 1 6t
Intersecting Lines
Non-Intersecting Lines
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 9

We can now select any two of the three equations from each line and equate them.Comparing the x and y components gives and Rearranging and simplifying gives
Subtracting from yeilds the following
Substituting into equation
We find and These two values can now be substituted into the parametric equations to find the corresponding values for x, y, and z.
Since we found that substituting and into the corresponding parametric equations gives the same values for x, y, and z, the point of intersection is
It is important to understand that, when finding the points of intersection betweenany pair of lines, it is necessary to substitute the parametric values back into theoriginal equations to check that a consistent result is obtained. In other words,and must give the same point for each line. In this case, there was a consistentvalue, and so we can be certain that the point of intersection is
In the following example, we will demonstrate the importance of checking forconsistency to find the possible point of intersection.
EXAMPLE 6 Connecting the solution to a system of equations to the case of skew lines
For and determine the point of
intersection.
SolutionWe use the same approach as in the previous example. In this case, we’ll start byequating corresponding y- and z-coordinates.
t [ R,z 5 30 2 5t,y 5 17 1 2t,L2 : x 5 4 2 t,s [ R,z 5 6 1 5s,y 5 3 1 4s,L1 : x 5 21 1 s,
125, 3, 12 2 .t 5 1
s 5 2
125, 3, 12 2 .
t 5 1s 5 2
t 5 1.s 5 2
s 5 2
s 2 611 2 5 241t 5 1
t 5 127t 5 27
12
s 1 t 5 32
s 2 6t 5 241
1 1 s 5 4 2 t.23 2 s 5 1 2 6t
9 . 1 T H E I N T E R S E C T I O N O F A L I N E W I T H A P L A N E A N D T H E I N T E R S E C T I O N O F T W O L I N E S10 NEL
L1 L2
x 5 23 2 2 5 25 x 5 1 2 611 2 5 25
y 5 1 1 2 5 3 y 5 4 2 1 5 3
z 5 4 1 412 2 5 12 z 5 6 1 611 2 5 12
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 10

Comparing y and z values, and Rearranging and simplifying gives
If is substituted into either equation or , we obtain the value of t.
Substituting into equation
We found that and These two values can now be substituted back
into the parametric equations to find the values for x, y, and z.
In order for these lines to intersect at a point, we must obtain equal values foreach coordinate. From observation, we can see that the x-coordinates are different,which implies that these lines do not intersect. Since the two given lines do notintersect and have different direction vectors, they must be skew lines.
t 51315.s 5
5915
t 513
15
236
152
210
155 2t
4 a 59
15b 2 2t 5 14
1
21s 55915
s 559
15
31215s 5 59,
135
210s 2 5t 5 35,3
5s 1 5t 5 242
4s 2 2t 5 141
6 1 5s 5 30 2 5t.3 1 4s 5 17 1 2t
C H A P T E R 9 11NEL
L1 L2
x 5 21 15915
54415
x 5 4 21315
54715
y 5 3 1 4 a 5915b 5
28115
y 5 17 1 2 a 1315b 5
28115
z 5 6 1 5 a 5915b 5
773
z 5 30 2 5 a 1315b 5
773
L1 L2
x 5 21 1 s x 5 4 2 t
y 5 3 1 4s y 5 17 1 2t
z 5 6 1 5s z 5 30 2 5t
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 11

Exercise 9.1
PART A1. Tiffany is given the parametric equations for a line L and the Cartesian equation
for a plane and is trying to determine their point of intersection. She makes asubstitution and gets
a. Give a possible equation for both the line and the plane.
b. Finish the calculation and describe the nature of the intersection betweenthe line and plane.
2. a. If a line and a plane intersect, in how many different ways can this occur?Describe each situation.
b. It is only possible to have 0, 1, or an infinite number of intersectionsbetween a line and a plane. Other than 0 or 1, explain why it is not possibleto have a finite number of intersections between a line and a plane.
3. A line has as its equation, and a plane has as itsequation.
a. Describe the line.
b. Describe the plane.
c. Draw a sketch of the line and the plane.
d. Describe the nature of the intersection between the line and the plane.
y 5 1s [ R,r!5 s11, 0, 0 2 ,
11 1 5s 2 2 212 1 s 2 2 3123 1 s 2 2 6 5 0.p
9 . 1 T H E I N T E R S E C T I O N O F A L I N E W I T H A P L A N E A N D T H E I N T E R S E C T I O N O F T W O L I N E S12 NEL
C
IN SUMMARY
Key Ideas
• Line and plane intersections can occur in three different ways.
Case 1: The line L intersects the plane at exactly one point, P.
Case 2: The line L does not intersect the plane and is parallel to the plane In this situation, there are no points of intersection and solving the system ofequations results in
Case 3: The line L lies on the plane In this situation, there are an infinitenumber of points of intersection between the line and the plane and solvingthe system of equations results in
• Line and line intersections can occur in four different ways.
Case 1: The lines intersect at a single point.
Case 2: The two lines are parallel, and there is no intersection.
Case 3: The two lines are not parallel and do not intersect. The lines in thiscase are called skew lines.
Case 4: The two lines are parallel and coincident. They are the same line.
p.
p.p
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 12

PART B4. For the each of the following, show that the line lies on the plane with the
given equation. Explain how the equation that results implies this conclusion.
a.
b.
5. For each of the following, show that the given line and plane do not intersect.Explain how the equation that results implies there is no intersection.
a.
b.
6. Verify your results in question 5. by showing that the direction vector of theline and the normal for the plane meet at right angles, and the given point onthe line does not lie on the plane.
7. For the following, determine the point of intersection between the given lineand plane.
a.
b.
8. Determine the point of intersection between the following pairs of lines.
a.
b.
9. Determine which of the following pairs of lines are skew lines.
a. and
b. and
c. and
d. and
10. The line with the equation intersectsthe z-axis at the point Determine the value of q.Q10, 0, q 2 .
s [ R,r!5 123, 2, 1 2 1 s13, 22, 7 2 ,
s [ Rr!5 18, 2, 3 2 1 s14, 1, 22 2 ,m [ Rr
!5 19, 1, 2 2 1 m15, 0, 4 2 ,
p [ Rr!5 122, 2, 1 2 1 p13, 21, 21 2 ,
m [ R,r!5 12, 2, 1 2 1 m11, 1, 1 2 ,
s [ Rr!5 12, 1, 28 2 1 s11, 0, 5 2 ,t [ Rr
!5 14, 1, 6 2 1 t11, 0, 4 2 ,
q [ Rr!5 122, 3, 24 2 1 q16, 22, 11 2 ,
p [ R,r!5 122, 3, 4 2 1 p16, 22, 3 2 ,
s [ RL4 : r!5 123, 2, 8 2 1 s17, 21, 26 2 ,
m [ R;L3 : r!5 13, 7, 2 2 1 m11, 26, 0 2 ,
t [ Rz 5 5t,y 5 1 2 5t,L2 : x 5 4 1 13t,s [ R;L1 : r
!5 13, 1, 5 2 1 s14, 21, 2 2 ,
p : 2x 1 7y 1 z 1 15 5 0L :x 2 1
45
y 1 2
215 z 2 3;
p : x 1 2y 2 z 1 29 5 0p [ R;L : r!5 121, 3, 4 2 1 p16, 1, 22 2 ,
p : 2x 2 4y 1 4z 2 13 5 0t [ R;z 5 1 1 4t,y 5 22 1 5t,L : x 5 1 1 2t,
p : 2x 2 2y 1 3z 2 1 5 0s [ R;L : r!5 121, 1, 0 2 1 s121, 2, 2 2 ,
p : 2x 2 3y 1 4z 2 11 5 0t [ R;L : r!5 11, 5, 6 2 1 t11, 22, 22 2 ,
p : x 1 4y 1 z 2 4 5 0t [ R;z 5 2 1 3t,y 5 1 2 t,L : x 5 22 1 t,
C H A P T E R 9 13NEL
K
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 13

11. a. Show that the following pair of lines are coincident by writing each of them in parametric form and comparing components:
and
b. Show that the point lies on How does this show that thelines are coincident?
12. The lines and, intersect at a point.
a. Determine the value of k.
b. What are the coordinates of the point of intersection?
13. The line intersects the xz- and yz-coordinate planes at the points A and B, respectively. Determine the length of the line segment AB.
14. The lines and intersect at the point A.
a. Determine the coordinates of point A.
b. What is the distance from point A to the xy-plane?
15. The lines andintersect at point A.
a. Determine the coordinates of point A.
b. Determine the vector equation for the line perpendicular to the two given lines and that passes through point A.
16. a. Draw a sketch of the lines and
b. At what point do these lines intersect?
c. Verify your conclusion from part b, algebraically.
PART C
17. a. Show that the two lines
and
lie on the plane with equation
b. Determine the point of intersection of these two lines.
18. A line passing through the point intersects the two lines withequations and
Determine a vector equation for this line.
t [ R.L2 : r!5 10, 1, 3 2 1 t122, 1, 3 2 ,
s [ R,L1 : r!5 11, 1, 21 2 1 s11, 1, 0 2 ,
P124, 0, 23 2
2x 1 y 1 3z 2 10 5 0.
y 5 21x 2 4
35
z 2 1
22,
x
15
y 2 7
285
z 2 1
2
q [ R.L2 : r!5 q10, 1, 1 2 ,
p [ R,L1 : r!5 p10, 1, 0 2 ,
t [ R,r!5 14, 21, 1 2 1 t10, 2, 11 2 ,
s [ R,r!5 121, 3, 2 2 1 s15, 22, 10 2 ,
q [ R,q19, 22, 22 2 ,r!5 13, 21, 1 2 1
p [ R,r!5 12, 1, 1 2 1 p14, 0, 21 2 ,
s [ R,r!5 128, 26, 21 2 1 s12, 2, 1 2 ,
t [ Rr!5 11, 4, 2 2 1 t123, k, 8 2 ,
s [ R,r!5 123, 8, 1 2 1 s11, 21, 1 2 ,
L2.122, 3, 4 2t [ R.L2 : r
!5 1230, 11, 24 2 1 t17, 22, 2 2 ,
s [ R,L1 : r!5 122, 3, 4 2 1 s17, 22, 2 2 ,
9 . 1 T H E I N T E R S E C T I O N O F A L I N E W I T H A P L A N E A N D T H E I N T E R S E C T I O N O F T W O L I N E S14 NEL
A
T
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 14

Section 9.2—Systems of Equations
To solve problems in real-life situations, it is often required that we solvesystems of linear equations. Thus far, we have seen systems of linear equationsin a variety of different contexts dealing with lines and planes. The following isa typical example of a system of two equations in two unknowns.
Each of the equations in this system is a linear equation. A linear equation is anequation of the form, where
and b are real numbers with the variables being theunknowns. Typical examples of linear equations are:and All of the variables in each of these equations areraised to the first power only (degree of one). Linear equations do not include any products or powers of variables, and there are no trigonometric, logarithmic,or exponential functions making up part of the equation. Typical examples ofnonlinear equations are: and
A system of linear equations is a set of one or more linear equations. When wesolve a system of linear equations, we are trying to find values satisfying each ofthe unknowns in each of the equations. In the following example, we consider asystem of two equations in two unknowns and possible solutions for this system.
EXAMPLE 1 Reasoning about the solutions to a system of two equations in two unkwons
The number of solutions to the following system of equations depends on thevalue(s) of a and b. Determine values for a and b for which this system has nosolutions, an infinite number of solutions, and one solution.
SolutionEach of the equations in this system represents a line in For these two lines,there are three cases to consider, each depending upon the values of a and b.
Case 1: These equations represent two parallel and non-coincident lines.If these lines are parallel, they must have the same slope, implying that
This means that the second equation is and the slope of each line is If this implies that the two lines are parallel and have different a Þ 8,21
4 .x 1 4y 5 8,
b 5 4.
R2.
x 1 by 5 82
x 1 4y 5 a1
y 5 sin 2x.2x 2 xyz 5 4,x 2 3y2 5 3,
x 1 3y 2 2z 2 2 5 0.x 1 4y 5 9,y 5 2x 2 3,
x1, x2, x3, p , xna3, p , an
a1, a2,a1x1 1 a2x2 1 a3x3 1 p 1 anxn 5 b,
x 1 2y 5 262
2x 1 y 5 291
C H A P T E R 9 15NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 15

equations. Since the lines would be parallel and not intersect, there is no solutionto this system when and
Case 2: These equations represent two parallel and coincident lines. This meansthe two equations must be equivalent. If and then both equations are identical and this system would be reduced to finding values of x and y thatsatisfy the equation Since there are an infinite number of pointssatisfying this equation, the original system will have an infinite number ofsolutions.
Case 3: These two equations represent two intersecting lines.The third possibility for these two lines is that they intersect at a point in These lines will intersect if they are not parallel, i.e., if In this case, thesolution is the point of intersection of these lines.
This system of linear equations is typical in that it can only have 0, 1, or an infinitenumber of solutions. In general, it is not possible for any system of linear equationsto have a finite number of solutions greater than one.
y
(8, 0)
Point ofintersection
x
x + 4y = a
x + by = 8, b 3 4
b Þ 4.R2.
y(0, 2)
(8, 0)x
x + 4y = 8
x 1 4y 5 8.
b 5 4,a 5 8
y(0, 2)
(8, 0)x
x + 4y = 8
x + 4y = a, a 3 8
a Þ 8.b 5 4
9 . 2 S YS T E M S O F E Q UAT I O N S16 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 16

C H A P T E R 9 17NEL
Number of Solutions for a Linear System of Equations
A linear system of equations can have 0, 1, or an infinite number of solutions.
In Example 2, the idea of equivalent system is introduced as a way of understandinghow to solve a system of equations. Equivalent systems of equations are defined inthe following way.
Definition of Equivalent SystemsTwo systems of equations are defined as equivalent if every solution of one systemis also a solution to the second system of equations.
The idea of equivalent systems is important because, in solving a system ofequations, what we are attempting to do is create a system of equations thatis easier to solve than the previous system. In order to construct an equivalentsystem of equations, the new system is obtained in a series of steps using a setof well defined operations. These operations are referred to as elementaryoperations.
Elementary Operations Used in Creating Equivalent Systems
1. Multiply an equation by a nonzero constant.
2. Interchange any pair of equations.
3. Add a nonzero multiple of one equation to a second equation to replace thatsecond equation.
In previous courses, when we solved systems of equations, it was often the case thatwe multiplied two equations by different constants and then added or subtracted toeliminate variables. Although these kinds of operations can be used algebraicallyto solve systems, elementary operations are used because of their applicability inhigher-level mathematics.
The use of elementary operations to create equivalent systems is illustrated in thefollowing example.
EXAMPLE 2 Using elementary operations to solve a system of two equations intwo unknowns
Solve the following system of equations
x 1 2y 5 262
2x 1 y 5 291
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 17

SolutionStep 1: Interchange equation and .
The rows have been interchanged to make the coefficient of x in the first equationequal to 1. This is always a good strategy when solving systems of linear equations.
This original system of equations is illustrated in the following diagram.
Step 2: Multiply equation by then add equation to eliminate the variable x from the second equation to create equation . Note that the coefficient of the x term in the new equation is 0.
When solving a system of equations, the elementary operations that are used arespecified beside the newly created equation.
Step 3: Multiply each side of equation 3 by to obtain a new equation that is labelled equation .
This new system of equations is illustrated in the diagram below.
y
(–6, 0)
(–4, –1)
(0, –3)
(0, –1)
After Step 3
x
x + 2y = –6
y = –1
321
3x0x 1 y 5 21,4
x 1 2y 5 261
4
213
221122 10x 2 3y 5 3,3
x 1 2y 5 261
3
222,1
y
(–6, 0)(–4.5, 0)
(–4, –1)
(0, –3)
(0, –9)
After Step 1
x
x + 2y = –62x + y = –9
2x 1 y 5 292x 1 2y 5 261
21
9 . 2 S YS T E M S O F E Q UAT I O N S18 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 18

The new system of equations that we produced is easier to solve than the originalsystem. If we substitute into equation , we obtain or
The solution to this system of equations is which is shown inthe graph below.
The equivalence of the systems of equations was illustrated geometrically at differentpoints in the calculations. As each elementary operation is applied, we create anequivalent system such that the two lines always have the point in common.When we create the various equivalent systems, the solution to each set of equationsremains the same. This is what we mean when we use elementary operations tocreate equivalent systems.
The solution to the original system of equations is and This meansthat these two values for x and y must satisfy each of the given equations. It is easy inthis case to verify that these values satisfy each of the given equations. For the firstequation, and for the second
A solution to a system of equations must satisfy each equation in the system inorder for it to be a solution to the overall system. This is demonstrated in thefollowing example.
EXAMPLE 3 Reasoning about the solution to a system of two equations in three unkowns
Determine whether and is a solution to the following system.
SolutionIn order for the given numbers to be a solution to this system of equations, it isnecessary that these values satisfy both equations.
Substituting into the first equation,
2123 2 1 315 2 2 516 2 5 26 1 15 2 30 5 221.
x 2 6y 1 6z 5 82
2x 1 3y 2 5z 5 2211
z 5 6y 5 5,x 5 23,
24 1 2121 2 5 26.2124 2 1 121 2 5 29
y 5 21.x 5 24
124, 21 2
y
(–4, 0)
(–4, –1) (0, –1)
Final system
x
x = –4
y = –1
y 5 21,x 5 24,x 5 24.
x 1 2121 2 5 261y 5 21
C H A P T E R 9 19NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 19

Substituting into the second equation,
Since the values of x, y, and z do not satisfy both of the equations, they are not asolution to this system.
If a system of equations has no solutions, it is said to be inconsistent. If a systemhas at least one solution, it is said to be consistent.
23 2 615 2 1 616 2 5 23 2 30 1 36 5 3 Þ 8.
9 . 2 S YS T E M S O F E Q UAT I O N S20 NEL
Consistent and Inconsistent Systems of Equations
A system of equations is consistent if it has either one solution or an infinitenumber of solutions. A system is inconsistent if it has no solutions.
In the following system of three equations in three unknowns, we show how touse elementary operations in its solution.
EXAMPLE 4 Using elementary operations to solve a system of three equations inthree unknowns
Solve the following system of equations for x, y, and z using elementary operations.
SolutionStep 1: Use equation to eliminate x from equations and .
Step 2: Use equations and to eliminate y from equation .
We can now solve this system by using a technique known as back substitution.Start by solving for z in equation and use that value to solve for y in equation .From there, we use the values for y and z to solve for x in equation .1
67
51424
330x 1 0y 1 3z 5 23,7
41
330x 1 y 2 z 5 3,6
x 2 y 1 z 5 11
554
31123 30x 1 4y 2 z 5 9,5
21122 30x 1 3y 2 3z 5 9,4
x 2 y 1 z 5 11
321
3x 1 y 1 2z 5 123
2x 1 y 2 z 5 112
x 2 y 1 z 5 11
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 20

From Equation ,
If we then substitute into equation ,
If and these values can now be substituted into equation to obtainor
Therefore, the solution to this system is
Check:These values should be substituted into each of the original equations and checkedto see that they satisfy each equation.
In solving this system of equations, we used elementary operations and ended upwith a triangle of zeros in the lower left part that looks like the following.
The use of elementary operations to create the lower triangle of zeros is our objectivein solving systems of equations. Large systems of equations are solved usingcomputers and elementary operations to eliminate unknowns. This is by far the most efficient and cost-effective method for their solution.
In the following example, we consider a system of equations with different possibilities for its solution.
EXAMPLE 5 Connecting the value of a parameter to the nature of the intersectionbetween two lines in
Determine the value(s) of k for which the system of equations
a. has no solutions
b. has one solution
c. has an infinite number of solutions
SolutionOriginal System of Equations
kx 1 4y 5 82
x 1 ky 5 41
kx 1 4y 5 82
x 1 ky 5 41
R2
0x 1 0y 1 hz 5 i
ax 1 by 1 cz 5 d
14, 2, 21 2 .x 5 4.x 2 2 1 121 2 5 1,
1z 5 21,y 5 2y 5 2.
y 2 121 2 5 3
6
z 5 21.3z 5 237
C H A P T E R 9 21NEL
0x 1 ey 1 fz 5 g
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 21

Step 1: Multiply equation by and add it to equation to eliminate x from equation .
Actual Solution to ProblemTo solve the problem, it is only necessary to deal with the equation
to determine the necessary conditions on k.
Rewrite this equation as (Factor)
(Multiply by )
Multiplying by
There are three different cases to consider.
Case 1:If this results in the equation or
Since this equation is true for all real values of y, we will have an infinite number ofsolutions. If substitution of this value into the original system of equationsgives
This system can then be reduced to just a single equation, which,as we have seen, has an infinite number of solutions.
Case 2:If this equation becomes or
There are no solutions for this equation. If substitution of this value intothe original system of equations gives
This system can be reduced to the two equations, and which is two parallel lines that do not intersect, and thus, there are no solutions.
Case 3:If this results in an equation of the form, This equationwill always have solutions for y. This implies that the original system of equationswill have exactly one solution provided that k Þ ; 2.
a Þ 0.ay 5 b,k Þ ; 2,k Þ ; 2
x 2 2y 5 24,x 2 2y 5 4
221x 2 2y 2 5 22124 22
x 2 2y 5 41
k 5 22,
0y 5 216.122 2 2 2 122 1 2 2y 5 4122 2 2 2 ,k 5 22,
k 5 22
x 1 2y 5 4,
21x 1 2y 2 5 214 22
x 1 2y 5 41
k 5 2,
0y 5 0.12 2 2 2 12 1 2 2y 5 412 2 2 2 ,k 5 2,k 5 2
1k 2 2 2 1k 1 2 2y 5 41k 2 2 2y1k2 2 4 2 5 41k 2 2 221:
21y12k2 1 4 2 5 241k 2 2 22k2y 1 4y 5 24k 1 8
4y 5 24k 1 80x 2 k2y 1
2112kx0x 2 k2y 1 4y 5 24k 1 8,3
x 1 ky 5 41
2
22k1
9 . 2 S YS T E M S O F E Q UAT I O N S22 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 22

Exercise 9.2
PART A1. Given that k is a nonzero constant, which of the following are linear
equations?
a. c.
b. d.
2. a. Create a system of three equations in three unknowns that has and as its solution.
b. Solve this system of equations using elementary operations.
3. Determine whether and is a solution to the followingsystems.
a. 1. b. 1.
2. 2.
3. 3. 8x 2 y 1 4z 5 258x 1 2y 5 3
3x 2 2y 5 223x 2 8z 5 213
3x 2 2y 1 16z 5 219x 2 3y 1 4z 5 219
z 534y 5 5,x 5 27,
z 5 28y 5 4,x 5 23,
1x
2 y 5 32 sin x 5 kx
2kx 1 3y 2 z 5 0kx 21
ky 5 3
C H A P T E R 9 23NEL
IN SUMMARY
Key Ideas• A system of two equations in two unknowns geometrically represents two
lines in These lines may intersect in 0, 1 or an infinite number of pointsand this depends on how the lines are related to each other.
Need to Know• Elementary operations can be used to solve a system of equations. The
operations are defined as follows:
1. Multiply an equation by a nonzero constant.
2. Interchange any pair of equations.
3. Add a multiple of one equation to a second equation to replace thatsecond equation.
As each elementary operation is applied, we create an equivalent system,which gets progressively easier to solve.
• The solution to a system of equations are the values for the variables thatsatisfy all equations in the system.
• A system of equations is consistent if it has either one solution or an infinitenumber of solutions. The system is inconsistent if it has no solutions.
R2.
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 23

PART B4. For each of the following, solve the system of equations and state whether
these systems are equivalent or not. Explain.
a. b.
5. Solve each of the following systems using elementary operations.
a. b. c.
6. Solve each of the following systems of equations and explain the nature of theintersection in each case.
a. b.
7. Write a solution to each equation using parameters.
a.
b.
8. a. Determine a linear equation that has as itsgeneral solution.
b. Show that is also a general solution tothe linear equation found in part a.
9. For what value(s) of the constant k does the following system of equationshave no solutions? one solution? infinitely many solutions?
10. For the equation determine each of the following:
a. the number of solutions for this equation
b. a generalized parametric solution for this equation
c. an explanation as to why this equation will not have any integer solutions
11. a. Solve the following system of equations for x and y.
b. Explain why this system of equations will always be consistent, irrespectiveof the values of a and b.
2x 1 3y 5 b2
x 1 3y 5 a1
2x 1 4y 5 11,
2x 1 2y 5 k2
x 1 y 5 61
t [ R,y 5 26t 2 17,x 5 3t 1 3,
t [ R,y 5 22t 2 11,x 5 t,
x 2 2y 1 z 5 0
2x 2 y 5 3
35x 2 15y 5 4522x 1 y 5 42
7x 2 3y 5 912x 1 y 5 31
3x 1 5y 5 323x 1 4y 5 112x 1 5y 5 112
2x 1 2y 5 1012x 1 5y 5 1912x 2 y 5 111
1
6x 2
1
2y 5
7
623y 5 292
3x 1 5y 5 2211x 5 221
9 . 2 S YS T E M S O F E Q UAT I O N S24 NEL
K
C
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 24

12. Solve the following systems of equations using elementary operations.
a. d.
b. e.
c. f.
13. For the system of equations given by the linesand
draw a sketch of the lines under the following conditions:
a. when the system of equations represented by these lines has no solutions
b. when the system of equations represented by these lines has exactly one solution
c. when the system of equations represented by these lines has an infinite number of solutions
14. Consider the following system of equations.
Determine the solution to this system.
PART C15. Determine the values of k for which this system of equations has:
a. no solutions
b. an infinite number of solutions
c. a unique solution
2x 1 k2y 5 k2
x 1 2y 5 211
y 1 z 5 c3
x 1 y 5 b2
x 1 y 1 z 5 a1
L3: gx 1 hy 5 r,ey 5 q,L2: dx 1L1: ax 1 by 5 p,
x 2 y 1 4z 5 193x 1 z 5 243
2y 2 3z 5 2122y 1 z 5 222
x 1 y 1 2z 5 131x 1 y 5 101
2z 2 x 5 03x 2 2y 2 z 5 2173
2y 2 z 5 72x 1 y 1 2z 5 312
2x 2 y 5 012x 2 3y 1 z 5 61
x
51
y
31
z
45 73y 2 z 5 253
x
41
y
51
z
35 2212x 2 y 5 12
x
31
y
41
z
55 141x 1 y 1 z 5 01
C H A P T E R 9 25NEL
A
T
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 25

9 . 3 I N T E R S E C T I O N O F T W O P L A N E S26 NEL
Section 9.3—Intersection of Two Planes
In the previous section, we introduced elementary operations and their use in thesolution of systems of equations. In this section, we will again examine systemsof equations but will focus specifically on dealing with the intersections of twoplanes. Algebraically, these are typically represented by a system of two equationsin three unknowns.
In our discussion on the intersections of two planes, there are three different casesto be considered, each of which is illustrated below.
Case 1: Two planes can intersect along a line. The corresponding system of equations will therefore have an infinite number of solutions.
Case 2: Two planes can be parallel and non-coincident. The corresponding systemof equations will have no solutions.
Case 3: Two planes can be coincident and will have an infinite number of solutions.
Possible Intersections for Two Planes
Case: 3
Two coincident planes
p1, p2L
Case: 1
Two planes intersecting along a line
p1
p2
Case: 2
Two parallel planes
p2
p1
Solutions for a System of Equations Representing Two Planes
The system of equations corresponding to the intersection of two planes willhave either zero solutions or an infinite number of solutions.
It is not possible for two planes to intersect at a single point.
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 26

EXAMPLE 1 Reasoning about the nature of the intersection between two planes: case 2
Determine the solution to the system of equations andDiscuss how these planes are related to each other.
SolutionSince the two planes have the same normals, this impliesthat the planes are parallel. Since the equations have different constants on theright side, the equations represent parallel and non-coincident planes. Thisindicates that there are no solutions to this system because these planes do notintersect.
The following represents the corresponding system of equations.
Using elementary operations, the following equivalent system of equations isobtained.
Since there are no values that satisfy equation , there are no solutions to thissystem, confirming our earlier conclusion.
EXAMPLE 2 Reasoning about the nature of the intersection between two planes: case 3
Determine the solution to the following system of equations.
SolutionSince equation can be written as the two equationsrepresent coincident planes. This means that there are an infinite number of solutions to this system of equations. The solution to this system of equations can be written using parameters in equation . If we let and then
The solution to this system is This isthe equation of a plane, expressed in parametric form. Every point that lies on thisplane is a solution to the given system of equations.
s, t [ R.z 5 t,y 5 s,x 5 22s 1 3t 2 1,
x 5 22s 1 3t 2 1.z 5 t,y 5 s1
41x 1 2y 2 3z 2 5 4121 2 ,2
4x 1 8y 2 12z 5 242
x 1 2y 2 3z 5 211
3
21121 30x 1 0y 1 0z 5 1,3
x 2 y 1 z 5 41
x 2 y 1 z 5 52
x 2 y 1 z 5 41
n1!5 n2
!5 11, 21, 1 2 ,
x 2 y 1 z 5 5.x 2 y 1 z 5 4
C H A P T E R 9 27NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 27

If we had solved the system using elementary operations, we would have arrivedat the following equivalent system.
There are an infinite number of values that satisfy equation , confirming ourearlier conclusion.
The normals of two planes give us important information about their intersection.
3
21124 30x 1 0y 1 0z 5 0,3
x 1 2y 2 3z 5 211
9 . 3 I N T E R S E C T I O N O F T W O P L A N E S28 NEL
Intersection of Two Planes and Their Normals
If the planes and have and as their respective normals, we knowthe following:
1. If the planes are either coincident or they are parallel and non-coincident. If they are coincident, there are an infinite number of pointsof intersection; if they are parallel but non-coincident, there are no points ofintersection.
2. If the two planes intersect in a line. This also results in an infinitenumber of points of intersection.
n1!Þ kn2
!,
n1!5 kn2
!,
n2!
n1!
p2p1
EXAMPLE 3 Reasoning about the nature of the intersection between two planes: case 1
Determine the solution to the following system of equations.
SolutionWhen solving a system involving two planes, it is useful to first determine thenormals for the two planes. The first plane has and the second
which implies that the two planes intersect because their normals are not parallel since these vectors are not scalar multiples. Since theseplanes intersect and do not coincide, the two planes intersect along a line.
We will use elementary operations to solve the system.
21122 30x 1 4y 2 4z 5 23,3
x 2 y 1 z 5 31
n2!5 12, 2, 22 2 ,
n1!5 11, 21, 1 2 ,
2x 1 2y 2 2z 5 32
x 2 y 1 z 5 31
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 28

To determine the equation of the line of intersection, a parameter must beintroduced. From equation , which is written as we start byletting Substituting gives
Substituting and into equation , we obtain
Therefore, the line of intersection expressed in parametric form is
Check:In order to check, we’ll substitute into each of the two original equations.
Substituting into equation ,
Substituting into equation ,
This check confirms our conclusion.
EXAMPLE 4 Selecting the most efficient strategy to determine the intersectionbetween two planes
Determine the solution to the following system of equations.
SolutionAs in the first example, we note that and Thesenormals are not scalar multiples, implying these two planes have a line of intersection.
To find the line of intersection, it is not necessary to use elementary operations toreduce one of the equations. Since the second equation is missing a y term, thebest approach is to write the second equation using a parameter for z. If then and now it is a matter of substituting these parametric valuesinto the first equation and determining y in terms of s. Substituting gives
x 5 3s 1 1,z 5 s,
n2!5 11, 0, 23 2 .n1
!5 12, 21, 3 2
x 2 3z 5 12
2x 2 y 1 3z 5 221
92 2
32 5 3.2x 1 2y 2 2z 5 2Q94R 1 2Qs 2
34R 2 2s 5
2
s 1 s 5 3.94 1
34 2x 2 y 1 z 5
94 2 Qs 2
34R 1 s 5
1
s [ R.z 5 s,y 5 s 234,x 5
94,
x 59
4
x 2 a s 23
4b 1 s 5 3
1y 5 s 234z 5 s
y 5 s 23
4
4y 5 4s 2 34y 2 4s 5 23
z 5 sz 5 s.4y 2 4z 5 23,3
C H A P T E R 9 29NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 29

The line of intersection is given by the parametric equations and
Check:Substituting into equation ,
Substituting into equation ,
In the next example, we will demonstrate how a problem involving theintersection of two planes can be solved in more than one way.
EXAMPLE 5 Selecting a strategy to solve a problem involving two planes
Determine an equation of a line through the point parallel to the lineof intersection of the planes and
SolutionMethod 1: Since the required line is parallel to the line of intersection of theplanes, then the direction vectors for both these lines must be equal. Since the line of intersection is contained in both planes, its direction vector must then beperpendicular to the normals of each plane.
If represents the direction vector of the required line, and it is perpendicular toand then
Thus,
5 15, 22, 1 25 1212 2 2 121 2 11 2 , 2110 2 2 112 2 , 111 2 2 210 22
m!5 11, 2, 21 2 3 10, 1, 2 2
m!5 n1
!3 n2
!.n2
!5 10, 1, 2 2 ,n1
!5 11, 2, 21 2
m!
n1
n2
P(5, –2, 3)
p1
p2
Line withdirectionvector m
Line of intersection hasdirection vector m
p2: y 1 2z 5 1.p1: x 1 2y 2 z 5 6P15, 22, 3 2
3s 1 1 2 31s 2 5 12
9s 2 4 1 3s 5 22.213s 1 1 2 2 19s 1 4 2 1 3s 5 6s 1 2 2
1
s [ R.z 5 s,y 5 9s 1 4,x 5 3s 1 1,
9s 1 4 5 y
6s 1 2 2 y 1 3s 5 22
213s 1 1 2 2 y 1 31s 2 5 22
9 . 3 I N T E R S E C T I O N O F T W O P L A N E S30 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 30

Thus the required line that passes through P(5, 2, 3) with a direction vector (5, 2, 1) has parametric equations and
Method 2: We start by finding the equation of the line of intersection between thetwo planes. In equation , if then by substitution.Substituting these values into equation gives
The line of intersection has and as its parametricequations. Since the direction vector for this line is the direction vectorfor the required line is also
The equation for the required line is t [ R.z 5 3 1 t,y 5 22 2 2t,x 5 5 1 5t,
15, 22, 1 2 .15, 22, 1 2 ,
z 5 ty 5 22t 1 1x 5 5t 1 4,
x 5 5t 1 4
x 2 4t 1 2 2 t 5 6
x 1 2122t 1 1 2 2 1t 2 5 6
1
y 5 22t 1 1z 5 t,2
t [ R.z 5 3 1 t,y 5 22 2 2t,x 5 5 1 5t,25m
! 2
C H A P T E R 9 31NEL
IN SUMMARY
Key Ideas
• A system of two equations in three unknowns geometrically represents twoplanes in R3. These planes may intersect in 0 or an infinite number of pointsand this depends on how the planes are related to each other.
Case 1: Two planes can intersect along a line and will therefore have aninfinite number of intersections.
Case 2: Two planes can be parallel and non-coincident. In this case, there areno solutions possible.
Case 3: Two planes can be coincident and will have an infinite number ofpoints of intersection.
Need to Know
• If the normals of two planes are known, examining how these are related toeach other provides information on how the two planes are related.
If the planes, and have and as their respective normals, we know the following:
1. If the planes are either coincident or they are parallel and non-coincident. If they are coincident, there are an infinite number ofpoints of intersection, and if they are parallel and non-coincident, thereare no points of intersection.
2. If the two planes intersect in a line. This also results in aninfinite number of points of intersection.
n1!Þ kn2
!,
n1!5 kn2
!,
n2!
n1!
p2,p1
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 31

Exercise 9.3
PART A1. A system of two equations in three unknowns has been solved, and after
correctly using elementary operations, a student arrives at the followingequivalent system of equations.
a. Explain what this solution means.
b. Give an example of a system of equations that might lead to this result.
2. A system of two equations in three unknowns has been solved, and aftercorrectly using elementary operations, a student arrives at the followingequivalent system of equations.
a. Write a solution to this system of equations and explain what this means.
b. Give an example of a system of equations that leads to this result.
3. A system of two equations in three unknowns has been solved, and aftercorrectly using elementary operations, a student arrives at the followingequivalent system of equations.
a. Write a solution to this system of equations and explain what this means.
b. Give an example of a system of equations that leads to this result.
PART B4. For the given system of equations determine the following.
a. A value for m, p, and q such that these two planes are coincident. Are these values unique? Explain.
b. A value for m, p, and q such that these two planes are parallel and notcoincident. Are these values unique? Explain.
c. A value for m such that the two given planes intersect at right angles. Is this value for m unique? Explain.
d. A value for m, p, and q such that these two planes intersect at right angles.Are these values unique? Explain.
x 1 my 1 3z 5 q2
2x 1 y 1 6z 5 p1
0x 1 0y 1 2z 5 243
x 2 y 1 z 5 211
0x 1 0y 1 0z 5 03
2x 2 y 1 2z 5 11
0x 1 0y 1 0z 5 33
x 2 y 1 z 5 11
9 . 3 I N T E R S E C T I O N O F T W O P L A N E S32 NEL
C
K
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 32

5. The following system of equations is to be solved.
a. Solve this system of equations by letting
b. Solve this system of equations by letting
c. Show that the solution you found in 5. a. is the same as the one you foundin 5. b.
6. In the following systems of equations involving two planes, determine the nature of their intersections. That is, state whether they intersect, and if they do intersect, specify if their intersection is a line or a plane.
a. c. e.
b. d. f.
7. Determine the solution to each of the systems in question 6.
8. A system of equations is given as follows.
a. For what value of k does this system have an infinite number of solutions? Determine the solution to this system for this value of k.
b. Is there any value of k for which this system does not have a solution? Explain.
9. Determine the vector equation of the line passing through that isparallel to the line of intersection of the planes and
10. For the planes and show that their line of intersection lies on the plane with equation
11. The line of intersection of the planes andis L.
a. Determine parametric equations for L.
b. If L meets the xy-plane at point A and the z-axis at point B, determine the length of line segment AB.
PART C12. Determine the Cartesian equation of the plane parallel to the line with
equation and that contains the line of intersection of the planes having equations and 2y 2 z 5 0.x 2 y 1 z 5 1
x 5 22y 5 3z
p2: x 2 2y 1 z 5 21p1: 2x 1 y 2 3z 5 3
5x 1 3y 1 16z 2 11 5 0.2x 1 y 1 6z 5 42x 2 y 1 2z 5 0
p2: y 1 4z 5 0.p1: 2x 2 y 1 z 5 0
A122, 3, 6 2
kx 1 2y 1 4z 5 k2
x 1 y 1 2z 5 11
z 5 42x 2 y 5 622x 2 y 1 z 1 2 5 02
x 2 y 1 2z 5 01x 1 y 1 2z 5 412x 2 y 1 z 1 1 5 01
2x 1 2y 1 z 5 12x 1 y 1 2z 5 2222x 1 2y 1 2z 5 22
2x 2 y 1 2z 5 21x 2 y 1 2z 5 21x 1 y 1 z 5 11
y 5 t.
z 5 s.
y 1 3z 5 02
x 1 2y 2 3z 5 01
C H A P T E R 9 33NEL
A
T
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 33

M I D - C H A P T E R R E V I E W34 NEL
Mid-Chapter Review
1. Determine the point of intersection between the line and each of the following planes.
a. the xy-plane
b. the xz-plane
c. the yz-plane
2. and are three points in that form atriangle.
a. Determine the parametric equations for any two of the three medians. (A median is a line drawn from one vertex to the midpoint of the opposite side.)
b. Determine the point of intersection of the two medians found in 2. a.
c. Determine the equation of the third median for this triangle.
d. Verify that the point of intersection you found in 2. b. is a point on the lineyou found in 2. c.
e. State the coordinates of the point of intersection of the three medians.
3. a. Determine an equation for the line of intersection of the planesand
b. Determine the line of intersection for the planes and
c. Determine the point of intersection between the line found in 3. a. and theone found in 3. b.
4. a. Determine the line of intersection of the planes and
b. Determine the line of intersection of the planes and
c. Show that the lines found in 4. a. and 4. b. do not intersect.
5. Consider the following system of equations.
Determine the value(s) of a for which the system of equations has
a. no solution
b. an infinite number of solutions
c. one solution
ax 1 9y 5 2272
x 1 ay 5 91
p4: 6x 2 13y 1 8z 2 28 5 0.p3: x 2 3y 1 z 1 11 5 0
p2: x 2 13y 2 3z 2 38 5 0.p1: 3x 1 y 1 7z 1 3 5 0
5x 1 2y 1 3z 1 5 5 0.4x 1 3y 1 3z 2 2 5 0
4x 1 y 1 2z 1 8 5 0.5x 1 y 1 2z 1 15 5 0
R3C128, 25, 7 2B13, 22, 5 2 ,A12, 1, 3 2 ,
t [ R,t12, 23, 5 2 ,r!5 14, 23, 15 2 1
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 34

C H A P T E R 9 35NEL
6. Show that and are skew lines.
7. a. Determine the intersection of the lines
and b. What conclusion can be drawn about these lines?
8. Determine the point of intersection between the lines and
9. Determine the intersection between the following pairs of lines.a. and
b. and
10. You are given a pair of vector equations that both represent lines in .a. Explain all the possible ways that these lines could be related to each
other and support your answers with diagrams.b. Explain how the equations you are given can be used to help you identify
which of the situations you described in 10. a. you are dealing with.
11. a. Explain when a line and a plane can have an infinite number of points ofintersection.
b. Give an example of a pair of vector equations (one for the line and one forthe plane) that correspond to the condition given in 11. a.
12. Use elementary operations to solve each system of equations.a.
b.
c.
13. For each of the systems of the equations given in question 12, describe thecorresponding geometrical representation.
14. is the line of intersection of planes and and is the line of intersection of the planes a. Determine the point of intersection of and .b. Determine the angle between the lines of intersection.c. Determine the Cartesian equation of the plane that contains the point
found in 12. a. and the two lines of intersection.
L1Ly 2 z 5 0 and x 5 2
12.
L1y 1 z 5 23,x 2 y 5 1L
23x 1 6y 1 2z 5 83
2x 2 5y 1 z 5 32
x 2 3y 2 2z 5 291
2x 1 8y 2 6z 1 11 5 02
x 1 4y 2 3z 1 6 5 01
x 2 2y 5 2132
2x 1 3y 5 301
R3
t [ Rr!5 128, 1, 29 2 1 t15, 21, 6 2 ,s [ R,r
!5 12, 21, 3 2 1 s15, 21, 6 2 ,
t [ Rr!5 121, 21, 3 2 1 t14, 2, 21 2 ,s [ R,r
!5 15, 1, 7 2 1 s12, 0, 5 2 ,
t [ R.z 5 2t,y 5 t 1 3,x 5 23,s [ R,z 5 23s,y 5 4 2 s,x 5 1 1 2s,
x 2 52 5 y 2 2 5
z 1 423 .t [ R,t12, 24, 5 2 ,1x 2 3, y 2 20, z 2 7 2 5
t [ R,z 5 3 1 2t,y 5 1 2 3t,x 5 0,x 2 11
2 5y 2 4
24 5z 2 27
5
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 35

Section 9.4—Intersection of Three Planes
In the previous section, we discussed the intersection of two planes. In thissection, we will extend these ideas and consider the intersection of three planes.Algebraically, these are typically represented by a system of three equations inthree unknowns.
First we will consider consistent systems; later in the section, we examineinconsistent systems.
Consistent Systems for Three Equations Representing Three PlanesThere are four cases that should be considered for the intersection of three planes.These four cases, which all result in one or more points of intersection betweenall three planes, are shown below.
p1, p2,p3
The plane of intersection of threecoincident planes is the plane itself
Case: 3
p1, p2
p3
L is the line of intersection of twocoincident planes and a third planenot parallel to the coincident planes
L
Case: 2b
L
p1p2
p3
Case: 2aL is the line of intersectionof three planes
P
p1
p2
p3
P is the point of intersectionof three planes
Case: 1
9 . 4 I N T E R S E C T I O N O F T H R E E P L A N E S36 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 36

Possible Intersections for Three PlanesA description is given below for each situation represented in the diagram on theprevious page.
Case 1: In this situation, there is just one solution for the corresponding system ofequations. This is a single point. The coordinates of the point of intersection willsatisfy each of the three equations.
This situation can be visualized by looking at the ceiling in a rectangular room.The point where the plane of the ceiling meets two walls represents the point ofintersection of three planes. Although planes are not usually at right angles toeach other and they extend infinitely far in all directions, this gives some idea ofhow planes can intersect at a point.
Case 2: In this situation, there are an infinite number of solutions to the related system of equations. Geometrically, this corresponds to a line, and the solution isgiven in terms of one parameter. For this, there are two cases to consider.
Case 2a: In this case, the three planes intersect along a line.
Case 2b: In this case, two planes are coincident, and the third plane cuts throughthese two planes intersecting along a line.
Case 3: In this situation, three planes are coincident, and there are an infinitenumber of solutions to the related system of equations. The number of solutionscorresponds to the infinite number of points on a plane, and the solution is givenin terms of two parameters. In this situation, there are three coincident planes thathave identical equations or that can be reduced to three equivalent equations.
In the following examples, we use elementary operations to determine the solutionof three equations in three unknowns.
EXAMPLE 1 Using elementary operations to solve a system of three equations inthree unknowns
Determine the intersection of the three planes having equations,and
SolutionFor the intersection of the three planes, we must find the solution to the followingsystem of equations.
3x 1 y 2 z 5 223
2x 2 y 2 2z 5 292
x 2 y 1 z 5 221
3x 1 y 2 z 5 22.2x 2 y 2 2z 5 29,x 2 y 1 z 5 22,
C H A P T E R 9 37NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 37

Step 1: Create two new equations, and , each containing an x term with acoefficient of 0.
To determine the required intersection, we use elementary operations and solvethis system of equations in the same way as shown earlier.
Step 2: We create equation by eliminating y from equation .
This equivalent system can now be solved by first solving equation for z.
Thus,
If we use the method of back substitution, we can substitute into equation andsolve for y.
Substituting into equation ,
If we now substitute and into equation , we obtain the value of x.or
Thus, the three planes intersect at the point with coordinates
Check:Substituting into equation ,
Substituting into equation ,
Substituting into equation ,
Checking in each of the equations confirms the solution.
Two of the other possibilities involving consistent systems are demonstrated in thefollowing two examples.
3x 1 y 2 z 5 3121 2 1 3 2 2 5 22.3
2x 2 y 2 2z 5 2121 2 2 3 2 212 2 5 29.2
x 2 y 1 z 5 21 2 3 1 2 5 22.1
121, 3, 2 2 .x 5 21x 2 3 1 2 5 22
1z 5 2y 5 3
y 5 3
y 2 412 2 5 25
4
4
z 5 2
12z 5 24
6
5140x 1 0y 1 12z 5 24, 24 36
0x 1 y 2 4z 5 254
x 2 y 1 z 5 221
56
3110x 1 4y 2 4z 5 4, 23 35
2110x 1 y 2 4z 5 25, 22 34
x 2 y 1 z 5 221
54
9 . 4 I N T E R S E C T I O N O F T H R E E P L A N E S38 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 38

EXAMPLE 2 Selecting a strategy to determine the intersection of three planes
Determine the solution to the following system of equations.
SolutionIn this situation, there isn’t a best way to solve this system, but because thecoefficients of x for two of the equations are equal, the computation might beeasier if we arranged them as follows (although, in cases like this, it is often amatter of individual preference).
interchanging equations and
Again, we try to create a 0 for the coefficient of x in two of the equations.
Applying elementary operations gives the following system of equations.
Before proceeding with further computation, we should observe that equations and are scalar multiples of each other and that, if equation is multiplied by 3, there will be two identical equations.
By using elementary operations again, we create the following equivalent system.
Equation in conjunction with equations and , indicates that this systemhas an infinite number of solutions. To solve this system, we let and solvefor y in equation .4
z 5 t417
6140x 1 0y 1 0z 5 0, 21 37
0x 2 7y 1 5z 5 34
3x 1 2y 2 z 5 01
50x 2 7y 1 5z 5 3, 3 36
0x 2 7y 1 5z 5 34
3x 1 2y 2 z 5 01
55
4
3110x 27
3y 1
5
3z 5 1, 2
2
335
2110x 2 7y 1 5z 5 3, 21 34
3x 1 2y 2 z 5 01
2x 2 y 1 z 5 13
3x 2 5y 1 4z 5 32
313x 1 2y 2 z 5 0,1
3x 1 2y 2 z 5 03
3x 2 5y 1 4z 5 32
2x 2 y 1 z 5 11
C H A P T E R 9 39NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 39

Thus, Dividing by
We determine the parametric equation for x by substituting in equation .
Substituting and into equation gives
Therefore, the solution to this system is and
In order to help simplify the verification, we will remove the fractions from thedirection numbers of this line by multiplying them by 7. (Recall that we cannotmultiply the points by 7.)
In simplified form, the solution to the system of equations is
and
Check:Substituting into equation ,
Substituting into equation ,
Substituting into equation ,
The solution to the system of equations is a line with parametric equations
and This is a line with direction vector
passing through the point
It is useful to note that the normals for these three planes are,and and because no pair of them is collinear,
the situation must correspond to case 2a.n3
!5 12, 21, 1 2 ,n2
!5 13, 25, 4 2 ,
n1!5 13, 2, 21 2 ,
Q27, 237, 0R.m
!5 121, 5, 7 2
z 5 7t, t [ R.x 5 2t 127, y 5 5t 2
37,
37 1 7t 5 1.2 Q2t 1
27R 2 Q5t 2
37R 1 7t 5 22t 1
47 2 5t 1
3
25t 1157 1 28t 5 3.3 Q2t 1
27R 2 5 Q5t 2
37R 1 417t 2 5 23t 1
67 2
2
10t 267 2 7t 5 0.3 Q2t 1
27R 1 2 Q5t 2
37R 2 7t 5 23t 1
67 1
1
z 5 7t, t [ R.y 5 5t 237,x 5 2t 1
27,
z 5 t.x 5 217 t 1
27, y 5
57 t 2
37,
x 5 21
7t 1
2
7
3x 13
7t 2
6
75 0
3x 1 2 a 5
7t 2
3
7b 2 t 5 0
1y 557 t 2
37z 5 t
1
27, y 557 t 2
37.27y 5 25t 1 3.
9 . 4 I N T E R S E C T I O N O F T H R E E P L A N E S40 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 40

EXAMPLE 3 More on solving a consistent system of equations
Determine the solution to the following system of equations.
SolutionAgain, using elementary operations
Continuing, we obtain
Equation indicates that this system has an infinite number of solutions.
We can solve this system by using a parameter for either y or z.
Substituting in equation gives and
Substituting in equation , and
Therefore, the solution to this system is, and
Check:Substituting in equation ,
Substituting in equation ,
There is no need to check in our third equation since . Equation represents the same plane as equation .
It is worth noting that the normals of the second and third planes,and are scalar multiples of each other and that the constants arerelated by this same factor. This indicates that the two equations represent the sameplane. Since either of these normals and are not scalar multiples,this implies that the first plane must intersect the two coincident planes along aline passing through the point with This correspondsto case 2b.
m!5 10, 1, 21 2 .11, 0, 21 2
n1!5 12, 1, 1 2
n3!5 18, 22, 22 2 ,
n2!5 14, 21, 21 2
2
33522 3
411 2 2 s 2 12s 2 1 2 5 4 2 s 1 s 1 1 5 5.2
211 2 1 s 1 12s 2 1 2 5 2 1 s 2 s 2 1 5 1.1
z 5 2s 2 1, s [ R.y 5 s,x 5 1,
x 5 1.2x 1 s 1 12s 2 1 2 5 11
z 5 2s 2 1.23s 2 3z 5 34y 5 s
6
5140x 1 0y 1 0z 5 0, 22 36
0x 2 3y 2 3z 5 34
2x 1 y 1 z 5 11
3110x 2 6y 2 6z 5 6, 24 35
2110x 2 3y 2 3z 5 3, 22 34
2x 1 y 1 z 5 11
8x 2 2y 2 2z 5 103
4x 2 y 2 z 5 52
2x 1 y 1 z 5 11
C H A P T E R 9 41NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 41

Inconsistent Systems for Three Equations Representing Three PlanesThere are four cases to consider for inconsistent systems of equations thatrepresent three planes.
The four cases which all result in no points of intersection between all threeplanes are shown below.
Non-intersections for Three PlanesA description of each situation in the diagram above is given below.
Case 1: Three planes and form a triangular prism as shown. This meansthat, if you consider any two of the three planes, they intersect in a line and each ofthese three lines is parallel to the others. In the diagram, the lines and rep-resent the lines of intersection between the three pairs of planes, and these lines havedirection vectors that are identical to, or scalar multiples of, each other.
Even though the planes intersect in a pair-wise fashion, there is no commonintersection between all three of the planes.
L3L2,L1,
p3 21p1, p2,
p1, p2
p3
Case: 4Two coincident planes, third plane paralleland non-coincident with first two planes
p1
p2
p3
Case: 3Three planes parallel, none coincident
p1 p2
p3
Case: 2Two parallel planes intersectinga third plane
L1 L2 L3
p1
p2 p3
A triangular prism formedby three parallel lines
Case: 1
9 . 4 I N T E R S E C T I O N O F T H R E E P L A N E S42 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 42

In this situation, the normals of the three planes are different from each other, andthe system is inconsistent, so the only geometric possibility is that the planes forma triangular prism. This idea is discussed in Example 4.
Case 2: We consider two parallel planes, each intersecting a third plane. Each ofthe parallel planes has a common line of intersection with the third plane, butthere is no common intersection between the three planes.
Cases 3 and 4: In these two situations, there is at least one pair of parallel planes, which again implies the three planes do not have any common points ofintersection.
EXAMPLE 4 Selecting a strategy to solve an inconsistent system of equations
Determine the solution to the following system of equations.
SolutionApplying elementary operations to this system, the following is obtained.
At this point, it can be observed that there is an inconsistency between equations and because, if equation is multiplied by it becomes which is inconsistent with equation 5 This implies there is nosolution to this system of equations. It is instructive, however, to continue usingelementary operations and observe the results.
Equation , tells us there is no solution to this system,because there are no values for x, y, and z that satisfy this equation. This system is inconsistent.
If we use the normals for these three equations, we can calculate the directionvectors for each pair of intersections. The normals for the three planes are
and n3!5 11, 25, 21 2 .n2
!5 11, 1, 2 2 ,n1
!5 11, 21, 1 2 ,
0x 1 0y 1 0z 5 2,6
5140x 1 0y 1 0z 5 2, 2 36
0x 1 2y 1 z 5 14
x 2 y 1 z 5 11
10x 2 4y 2 2z 5 0 2 .0x 2 4y 2 2z 5 22,22,45
4
3110x 2 4y 2 2z 5 0, 21 35
2110x 1 2y 1 z 5 1, 21 34
x 2 y 1 z 5 11
x 2 5y 2 z 5 13
x 1 y 1 2z 5 22
x 2 y 1 z 5 11
C H A P T E R 9 43NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 43

Let be the direction vector for the line of intersection between and
Let be the direction vector for the line of intersection between and
Let be the direction vector for the line of intersection between and
Therefore,
We can see from this calculation that this system of equations corresponds to case 1 for systems of inconsistent equations (triangular prism).
In this example, this possibility could also have been anticipated without doing anyactual calculation. We have shown that the actual system of equations is inconsistent,and because the normals are all different, this leads directly to the same conclusion.
In the following example, we deal with another inconsistent system.
EXAMPLE 5 Reasoning about an inconsistent system of equations
Determine the solution to the following system of equations.
SolutionUsing elementary operations
It is only necessary to use elementary operations once, and we obtain equation .As before, we create an equivalent system of equations that does not have asolution, implying the original system has no solution.
It should be noted that it is not necessary to use elementary operations in thisexample, because equations 1 and 2 are the equations of parallel planes, and as a
4
x 2 3y 1 z 5 03
2110x 1 0y 1 0z 5 4, 21 34
x 2 y 1 2z 5 211
x 2 3y 1 z 5 03
x 2 y 1 2z 5 32
x 2 y 1 2z 5 211
211 2 2 1121 2 , 1125 2 2 111 22 5 23123, 21, 2 25 11 121 2 2 2125 2 ,m3
!5 n2
!3 n3
!5 11, 1, 2 2 3 11, 25, 21 2
5 22123, 21, 2 212111 2 2 1121 2 , 1125 2 2 121 2 11 225 121121 2 2 1125 2 ,
m2!5 n1
!3 n3
!5 11, 21, 1 2 3 11, 25, 21 2
111 2 2 112 2 , 111 2 2 121 2 11 22 5 123, 21, 2 25 12112 2 2 111 2 ,m1
!5 n1
!3 n2
!5 11, 21, 1 2 3 11, 1, 2 2
p3.p2m3!
p3.p1m2!
p2.p1m1!
9 . 4 I N T E R S E C T I O N O F T H R E E P L A N E S44 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 44

result, no intersection is possible. This corresponds to case 2 for systems ofinconsistent equations.
EXAMPLE 6 Indentifying coincident and parallel planes in an inconsistent sytstem
Solve the following system of equations.
SolutionIt is clear from observation that this system of equations is inconsistent. Equations
and represent the same plane, and equation represents a plane parallelto, but different from, the other plane. This corresponds to case 4 for systems ofinconsistent equations, and so there are no solutions.
231
x 1 y 1 z 5 53
x 1 y 1 z 5 42
x 1 y 1 z 5 51
C H A P T E R 9 45NEL
IN SUMMARY
Key Ideas
• A system of three equations in three unknowns geometrically representsthree planes in R3. These planes may intersect in 0, 1, or an infinite numberof points and this depends on how the planes are related to each other.
Need to Know
• Consistent Systems for Three Equations Representing Three Planes
Case 1 (One Solution): There is a single point.
Case 2 (Infinite Number of Solutions): The solution uses one parameter.
Case 2a: In this case, the three planes intersect along a line.
Case 2b: In this case, two planes are coincident, and the third plane cutsthrough these two planes.
Case 3 (Infinite Number of Solutions): The solution uses two parameters. Inthis case, there are three planes that have identical equations (after reducingthe equations) that coincide with one another.
• Inconsistent Systems for Three Equations Representing Three Planes (NoIntersection)
Case 1: Three planes , and form a triangular prism.
Case 2: Two parallel planes each intersect a third plane.
Case 3: The three planes are parallel.
Case 4: Two planes are coincident and parallel to the third plane.
p3 21p1, p2
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 45

Exercise 9.4
PART A1. A student is solving a system of equations and obtains the following.
a. Determine the solution to this system of equations.
b. How would this solution be interpreted geometrically?
2. In solving a system of equations, a student obtains the following.
a. Give a system of equations that would produce this result.
b. How would you interpret the solution to this system of equations geometrically?
c. Write the solution to this system using parameters for x and y.
d. Write the solution to this system using parameters for y and z.
3. In solving a system of equations, a student obtains the following.
Give two systems of equations that could have produced this result.
4. In solving a system of equations, a student obtains the following.
a. Without using any further elementary operations, determine the solution tothis system.
b. How can the solution to this system be interpreted geometrically?
2x 1 0y 1 0z 5 263
x 1 0y 2 2z 5 02
x 1 2y 2 z 5 41
0x 1 0y 1 0z 5 13
x 2 y 1 4z 5 32
2x 2 y 1 3z 5 221
0x 1 0y 1 0z 5 03
0x 1 0y 1 0z 5 02
x 2 y 1 z 5 41
0x 1 0x 1 3z 5 2123
0x 1 y 2 z 5 212
x 2 3y 1 z 5 21
9 . 4 I N T E R S E C T I O N O F T H R E E P L A N E S46 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 46

PART B5. a. Without actually solving the following system, how can you deduce that
these three planes must intersect in a line?
b. Find the solution to the given equations using elementary operations.
6. Explain why there is no solution to this system of equations.
7. Avery is solving a system of equations and, in using elementary operations,derives as one of the equations,
a. Is it true that the equation itself will always have a solution? Explain.
b. Construct your own system of equations in which the equationappears, but for which there is no solution to the
constructed system of equations.
8. Solve the following systems of equations using elementary operations.Interpret the results geometrically.
a.
b.
c.
d.
x 1 1 5 53
y 2 2 5 02
x 2 y 2 z 5 211
y 2 z 5 2013
x 1 z 5 22002
x 2 y 5 21991
x 2 2y 1 3z 5 23
2x 1 2y 2 3z 5 2202
x
32
y
41 z 5
7
81
3x 1 2y 2 z 5 253
x 2 y 1 2z 5 02
2x 1 y 2 z 5 231
0x 1 0y 1 0z 5 0
0x 1 0y 1 0z 5 0.
5x 2 5y 1 15z 5 210043
x 2 y 1 3z 5 22012
2x 1 3y 2 4z 5 251
23x 2 3y 1 3z 5 33
x 1 y 2 z 5 212
2x 2 y 1 z 5 11
C
K
C H A P T E R 9 47NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 47

9. Solve each of the following systems of equations using elementary operations.Interpret the results geometrically.
a.
b.
c.
10. Determine the solution to each of the following systems.
a. b.
11. a. Use elementary operations to show that the following system does nothave a solution.
b. Calculate the direction vectors for the lines of intersection between eachpair of planes as shown in Example 4.
c. Explain, in your own words, why the planes represented in this system ofequations must correspond to a triangular prism.
d. Explain how the same conclusion could have been reached without doingthe calculations in 11.b.
12. Each of the following systems does not have a solution. Explain why.
a.
b.
c.
2x 2 2y 1 2z 5 173
2x 2 2y 1 2z 5 182
x 2 y 1 z 5 91
5x 2 2y 1 3z 5 133
5x 2 2y 1 3z 5 212
5x 2 2y 1 3z 5 11
3x 2 5z 5 03
x 2 y 1 3z 5 62
x 2 y 1 3z 5 31
x 2 y 1 z 5 03
x 2 2y 1 z 5 02
x 1 y 1 z 5 11
22x 1 y 2 3z 5 03x 1 y 2 z 5 223
4x 2 2y 1 6z 5 022x 2 2y 1 2z 5 42
2x 2 y 1 3z 5 01x 2 y 1 z 5 21
x 2 3y 1 z 5 263
x 1 y 1 z 5 22
x 2 y 1 z 5 221
x 2 3y 1 z 5 263
x 1 y 1 z 5 22
x 2 2y 1 z 5 31
5x 2 3y 1 2z 5 03
2x 1 3y 2 z 5 292
x 2 2y 1 z 5 31
A
9 . 4 I N T E R S E C T I O N O F T H R E E P L A N E S48 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 48

13. Determine the solution to the following systems of equations, if they exist.
a. d.
b. e.
c. f.
PART C14. The following system of equations represents three planes that intersect in
a line.
a. Determine p and q.
b. Determine an equation in parametric form for the line of intersection.
15. Consider the following system of equations.
Determine the value(s) of m for which this system of equations will have
a. no solution
b. one solution
c. an infinite number of solutions
16. Determine the solution to the following system of equations.
4a
22
b1
3c
55
23
2a
13
b1
2c
513
62
1a
11
b2
1c
5 01
3x 2 2y 1 1m2 2 6 2z 5 m 2 43
2x 1 y 1 z 5 242
4x 1 3y 1 3z 5 281
4x 1 qy 1 z 5 23
x 2 y 1 z 5 p2
2x 1 y 1 z 5 41
2x 2 y 1 3z 5 034x 2 5y 1 5z 5 03
x 2 2y 1 3z 5 022x 2 y 1 z 5 02
x 1 y 1 z 5 01x 1 y 2 z 5 01
3x 1 y 1 3z 5 235x 1 2y 2 5z 5 03
x 1 y 1 z 5 22x 1 y 2 2z 5 12
x 2 y 1 z 5 2212x 2 y 1 z 5 231
x 2 10y 1 13z 5 2830x 1 y 2 z 5 83
2x 2 20y 1 26z 5 282x 1 y 1 0z 5 72
x 2 10y 1 13z 5 2412x 2 y 2 z 5 101
T
C H A P T E R 9 49NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 49

Section 9.5—Distance from a Point to a Linein and
In this section, we consider various approaches for determining the distancebetween a point and a line in and
Determining a Formula for the Distance between a Point and a Line in
Consider a line in that has as its general equation as shown in the diagram above. The point is a point not on the line and whose coordinates are known. A line from is drawn perpendicular to
and meets this line at R. This line is extended to point Q. Thepoint represents a second point on the line different from R. We wish to
determine a formula for the distance from to the line. (Note that, whenwe are calculating the distance between a point and either a line or a plane, weare always calculating the perpendicular distance and that this distance is alwaysunique. In simple terms, this means that, in this situation, there is only oneshortest distance that can be calculated between and )
In determining this formula, we are going to take the scalar projection of on Since is perpendicular to what we are doing is
taking the scalar projection of on a normal where represents thisnormal.
P0Q!
n!
P0P1
! Ax 1 By 1 C 5 0,P0Q!
P0Q!.
P0P1
!Ax 1 By 1 C 5 0.P0
P0@P0 R! @ ,
P11x1, y1 2Ax 1 By 1 C 5 0
P0
P01x0, y0 2Ax 1 By 1 C 5 0R2
y
xO
Q
R
Ax + By + C = 0
u
P0(x0, y0)
P1(x 1, y1)
= (A, B)n
R2
R3.R2
R3R2
NEL9 . 5 D I S TA N C E F R O M A P O I N T TO A L I N E I N A N D R3R250
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 5:13 PM Page 50

We know that, and The formula for the
dot product is, where is the angle between andRearranging this formula gives
(Equation 1)
From triangle
(Equation 2)
Substituting, into the dot product formula (Equation 1 above)gives
Since and
then by substitution we obtain
The point is on the line meaning that or Substituting this into the formula for
gives the following:
In order to ensure that this quantity is always positive it is written as
@P0R! @ 5 0Ax0 1 By0 1 C 0
ÏA2 1 B2
@P0R! @ 5 2C 2 Ax0 2 By0
ÏA2 1 B25
21C 1 Ax0 1 By0 2ÏA2 1 B2
@P0R! @
Ax1 1 By1 5 2C.C 5 0Ax1 1 By1 1
Ax 1 By 1 C 5 0,P11x1, y1 2
@P0R! @ 5 Ax1 1 By1 2 Ax0 2 By0
ÏA2 1 B2
0n! 0 5 ÏA2 1 B2,
P0P1
! # n!5 1x1 2 x0, y1 2 y0 2 # 1A, B 2 5 Ax1 2 Ax0 1 By1 2 By0
@P0R! @ 5 P0P1
! # n!
0n! 0
@P0P1
! @ cos u 5 @P0R! @
@P0P1
! @ cos u 5 @P0R! @
cos u 5@P0R
! @@P0P1
! @
P0RP1
@P0P1
! @ cos u 5P0P1
! # n!
0n! 0
n!.
P0P1
!uP0P1
! # n!5 @P0P1
! @ 0n! 0 cos u
n!5 1A, B 2 .P0P1
!5 1x1 2 x0, y1 2 y0 2
Distance from a Point to the Line with Equation
where d represents the distance between the point
which does not lie on the line defined by Ax 1 By 1 c 5 0.P01x0, y0 2d 5
0Ax0 1 By0 1 C 0ÏA2 1 B2
Ax 1 By 1 C 5 0P01x0, y0 2
NEL C H A P T E R 9 51
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 51

EXAMPLE 1 Calculating the distance between a point and a line in
Determine the distance from the point to the line with equation
Solution
Since
The distance from to the line with equation isapproximately 4.63.
It is not possible to use the above formula if we want to find the distance betweena given point and a line if the line is given in vector form. In the following example,we show how to find the required distance if the line is given in vector form.
EXAMPLE 2 Selecting a strategy to determine the distance between a point and a line in
Determine the distance from the point to the line with equation
SolutionIn order to use the formula, it is necessary to convert the equation of the line invector form to its corresponding Cartesian form. The given equation must firstbe written using parametric form. The parametric equations for this line are
and Solving for the parameter s in each equation
gives and Therefore, The required
equation is, or
Therefore,
The required distance is 3.80.
d 503115 2 1 4129 2 1 10 0
V321 42 5
195 5 3.80.
3x 1 4y 1 10 5 0.31x 1 2 2 5 241y 1 1 2x 1 2
24 5y 1 1
3 5 s.y 1 13 5 s.x 1 2
24 5 s
y 5 21 1 3s.x 5 22 2 4s
s [ R.s124, 3 2 ,r!5 122, 21 2 1
B115, 29 2R2
5x 2 3y 1 15 5 0A126, 4 2
d 505126 2 2 314 2 1 15 0
Ï52 1 123 2250227 0Ï34
8 4.63.
C 5 15,B 5 23,A 5 5,y0 5 4,x0 5 26,
y
A(–6, 4)
A(–3, 0)
B(0, 5)
x
5x – 3y + 15 = 0
d
5x 2 3y 1 15 5 0.A126, 4 2
R2
NEL9 . 5 D I S TA N C E F R O M A P O I N T TO A L I N E I N A N D R3R252
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 5:13 PM Page 52

EXAMPLE 3 Selecting a strategy to determine the distance between two parallel lines
Calculate the distance between the two parallel lines and
SolutionIn order to find the required distance, it is necessary to determine the coordinatesof a point on one of the lines and then use the distance formula. For the line withequation we can determine the coordinates of the pointwhere this line crosses either the x- or y-axis. (This point was chosen because it iseasy to calculate and it also makes the resulting computation simpler. In practice,however, any point on the chosen line is satisfactory.) If we let then
or The line crosses the y-axis at To findthe required distance, d, it is necessary to find the distance from to theline with equation,
Therefore, the distance between the two parallel lines is
Determining the Distance between a Point and a Line in It is not possible to use the formula we just developed for finding the distance between a point and a line in because lines in are not of the form
It is necessary to use a different approach.
The most efficient means of finding the distance between a point and a line in
is by use of the cross product. In the following diagram, we would like to findd, which represents the distance between the point P, whose coordinates areknown, and a line with vector equation Point Q is any pointon the line whose coordinates are also known. The point T is any other point on
the line, and is a vector representing the direction which is known.
The angle between and is Note that, for computational purposes, it is
possible to determine the coordinates of a position vector equivalent to either
or PQ!.
QP!u.QT
!QP
!Q
RT
P
d
u m
r = r0 + sm, s [ R
m!,QT
!
s [ R.r!5 r
!0 1 sm
!,
R3
Ax 1 By 1 C 5 0.R3R3
R3
12013 8 9.23.
d 50510 2 2 12125 2 1 60 0
Ï52 1 1212 22 50120 013
5120
13
5x 2 12y 1 60 5 0.10, 25 210, 25 2 .y 5 25.510 2 2 12y 2 60 5 0,
x 5 0,
5x 2 12y 2 60 5 0,
5x 2 12y 2 60 5 0.5x 2 12y 1 60 5 0
NEL C H A P T E R 9 53
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 53

In
Or,
From our earlier discussion on cross products, we know that
If we substitute into this formula, we find that
Solving for d gives, d 5@m!
3 QP! @
0m! 0 .
@m!3 QP
! @ 5 0m! 0 1d 2 .d 5 @QP
! @ sin u
@m!3 QP
! @ 5 0m! 0 @QP! @ sin u.
d 5 @QP! @ sin u.
sin u 5d
@QP! @ .¢PQR,
Distance, d, from a point, P, to the Line
In R3, where Q is a point on the line and P is a point not on the
line, both whose coordinates are known. is the direction vector of the line.m!
d 5@m!
3 QP! @
0m! 0
r!5 r
!0 1 sm
!, s [ R
EXAMPLE 4 Selecting a strategy to calculate the distance between a point anda line in
Determine the distance from the point to the line with equation
SolutionMethod 1: (Using the Formula)Since Q is and P is
From the equation of the line, we note that
Thus,
Calculating
and
Therefore the distance from the point to the line is, d 56Ï2Ï2
5 6.
0 10, 1, 1 2 0 5 Ï02 1 12 1 12 5 Ï2.
0 18, 22, 2 2 0 5 Ï82 1 122 22 1 22 5 Ï72 5 6Ï2
10, 1, 1 2 3 122, 21, 7 2 5 17 2 121 2 , 22 2 0, 0 1 2 2 5 18, 22, 2 2
d 50 10, 1, 1 2 3 122, 21, 7 2 0
0 10, 1, 1 2 0
m!5 10, 1, 1 2 .
QP!5 321 2 1, 1 2 2, 6 2 121 2 4 5 122, 21, 7 2 .
121, 1, 6 2 ,11, 2, 21 2
t [ R.r!5 11, 2, 21 2 1 t10, 1, 1 2 ,
P121, 1, 6 2R3
NEL9 . 5 D I S TA N C E F R O M A P O I N T TO A L I N E I N A N D R3R254
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 5:14 PM Page 54

This calculation is efficient and gives the required answer quickly. (Note that thevector cannot be reduced by dividing through by the common factor 2,or by any other factor for that matter.)
Method 2: (Using the Dot Product)We start by writing the given equation of the line in parametric form. Doing so gives and We construct a vector from P to a general point on the line and call this vector Thus,
What wewish to find is the minimum distance between the point and the givenline. This occurs when is perpendicular to the given line, or when
Calculating gives
This means that the minimal distance between and the line occurswhen which implies that the point corresponding to produces the minimal distance between the point and the line. This point has coordinates
and In other words, the minimal distancebetween the point and the line is the distance between and Thus
This gives the same answer found using method 1 and has the advantage that italso allows us to find the coordinates of the point on the line that produces theminimal distance.
d 5 Ï121 2 1 22 1 11 2 5 22 1 16 2 2 22 5 Ï4 1 16 1 16 5 Ï36 5 6
11, 5, 2 2 .P121, 1, 6 2z 5 21 1 3 5 2.y 5 2 1 3 5 5,
x 5 1,t 5 3t 5 3,
P121, 1, 6 2t 5 3
21 2 t 1 7 2 t 5 00122 2 1 1121 2 t 2 1 117 2 t 2 5 010, 1, 1 2 # 122, 21 2 t, 7 2 t 2 5 0
m! # a
!5 0.a
! P121, 1, 6 21 2 12 1 t 2 , 6 2 121 1 t 2 4 5 122, 21 2 t, 7 2 t 2 .a
!5 321 2 1,
a!.
z 5 21 1 t.y 5 2 1 t,x 5 1,
18, 22, 2 2
IN SUMMARY
Key Ideas
• In R2 the distance from a point to the line with equation
is where d represents the distance.
• In R3 the formula for the distance d from a Point P to the Line
is where Q is a point on the line whose coordinates
are known.
d 5@m!
3 QP! @
0m! 0s [ R
r!5 r0
!1 sm
!,
d 50Ax0 1 By0 1 C 0
ÏA2 1 B2Ax 1 By 1 C 5 0
P01x0, y0 2
NEL C H A P T E R 9 55
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 55

Exercise 9.5
PART A1. Determine the distance from to each of the following lines.
a.
b.
c.
2. Determine the distance between the following pairs of parallel lines.
a. and
b. and
3. Determine the distance from to each of the following lines.
a.
b.
c.
PART B4. a. The formula for the distance from a point to a line is
Show that this formula can be modified so the
distance from the origin, to the line is given by
the formula
b. Determine the distance between andby first finding the distance from the origin to
and then finding the distance from the origin to
c. Find the distance between the two lines directly by first determining apoint on one of the lines and then using the distance formula. How doesthis answer compare to the answer found in 4. b.?
5. Calculate the distance between the following pairs of lines.
a. and
b. and
c. and
d. and 5x 1 12y 1 120 5 05x 1 12y 5 120
2x 2 3y 2 3 5 02x 2 3y 1 1 5 0
x
45
y 1 1
23
x 2 1
45
y
23
t [ Rr!5 11, 0 2 1 t13, 4 2 ,s [ Rr
!5 122, 1 2 1 s13, 4 2 ,
L2.L1L2: 3x 2 4y 1 12 5 0
L1: 3x 2 4y 2 12 5 0
d 50C 0
ÏA2 1 B2.
Ax 1 By 1 C 5 0O10, 0 2 ,d 5
0Ax0 1 By0 1 C 0ÏA2 1 B2
.
p [ Rr!5 11, 3 2 1 p17, 224 2 ,
t [ Rr!5 11, 0 2 1 t15, 12 2 ,
s [ Rr!5 121, 2 2 1 s13, 4 2 ,
R122, 3 27x 2 24y 2 336 5 07x 2 24y 1 168 5 0
2x 2 y 1 6 5 02x 2 y 1 1 5 0
9x 2 40y 5 0
5x 2 12y 1 24 5 0
3x 1 4y 2 5 5 0
P124, 5 2
C
K
NEL9 . 5 D I S TA N C E F R O M A P O I N T TO A L I N E I N A N D R3R256
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 5:14 PM Page 56
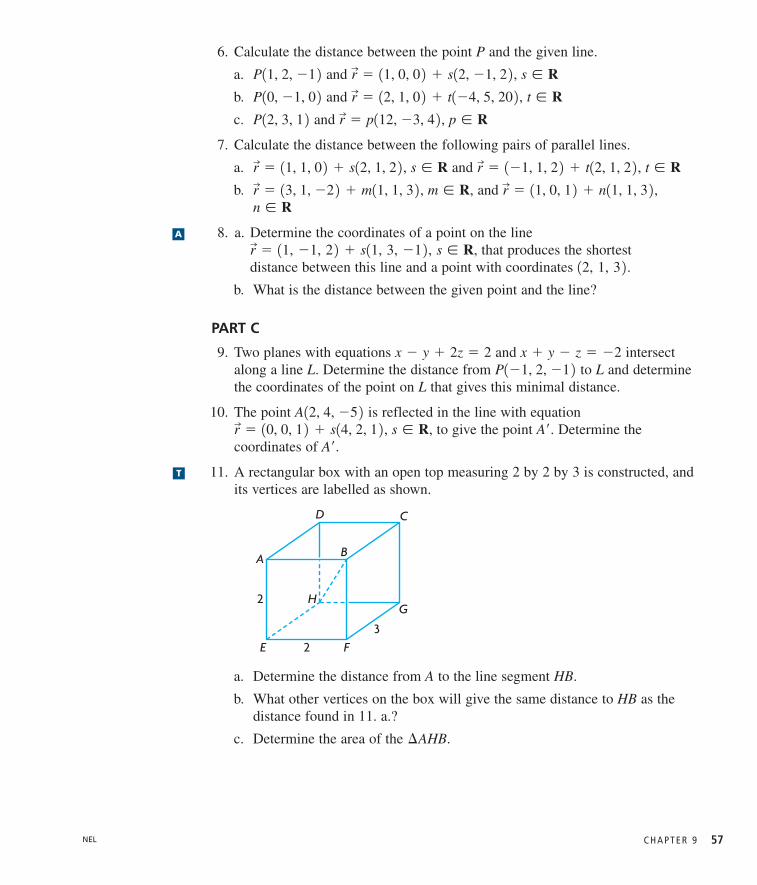
6. Calculate the distance between the point P and the given line.
a. and
b. and
c. and
7. Calculate the distance between the following pairs of parallel lines.
a. and
b. and
8. a. Determine the coordinates of a point on the line that produces the shortest
distance between this line and a point with coordinates
b. What is the distance between the given point and the line?
PART C
9. Two planes with equations and intersectalong a line L. Determine the distance from to L and determinethe coordinates of the point on L that gives this minimal distance.
10. The point is reflected in the line with equationto give the point Determine the
coordinates of
11. A rectangular box with an open top measuring 2 by 2 by 3 is constructed, andits vertices are labelled as shown.
a. Determine the distance from A to the line segment HB.
b. What other vertices on the box will give the same distance to HB as thedistance found in 11. a.?
c. Determine the area of the AHB.¢
2
23
D C
G
F
H
E
A B
A¿.A¿.s [ R,r
!5 10, 0, 1 2 1 s14, 2, 1 2 ,
A12, 4, 25 2
P121, 2, 21 2x 1 y 2 z 5 22x 2 y 1 2z 5 2
12, 1, 3 2 .s11, 3, 21 2 , s [ R,r
!5 11, 21, 2 2 1
n [ Rr!5 11, 0, 1 2 1 n11, 1, 3 2 ,m [ R,r
!5 13, 1, 22 2 1 m11, 1, 3 2 ,
t [ Rr!5 121, 1, 2 2 1 t12, 1, 2 2 ,s [ Rr
!5 11, 1, 0 2 1 s12, 1, 2 2 ,
p [ Rr!5 p112, 23, 4 2 ,P12, 3, 1 2
t [ Rr!5 12, 1, 0 2 1 t124, 5, 20 2 ,P10, 21, 0 2
s [ Rr!5 11, 0, 0 2 1 s12, 21, 2 2 ,P11, 2, 21 2
A
T
NEL C H A P T E R 9 57
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 57

Section 9.6—Distance from a Point to a Plane
In the previous section, we developed a formula for finding the distance from apoint to the line In this section, we will usethe same kind of approach to develop a formula for the distance from a point
to the plane with equation
Determining a Formula for the Distance between a Point and a Plane in We start by considering a general plane in that has as its equation. The point is a point where the coordinates areknown but it is not on the plane. A line from P0 is drawn perpendicular to
and meets this plane at R. The point is a point on the plane, with coordinates different from R, and is a normal to the plane. The objective is to find a formula for —the perpendicular distance from to the plane. In developing this formula, we are going to use the fact that is the scalar projection of on the normal
In
Since,
Therefore, where d is the distance from the point to the plane.
Since and
0n! 0 5 ÏA2 1 B2 1 C2
P0P1
!5 1x1 2 x0, y1 2 y0, z1 2 z0 2n
!5 1A, B, C 2 ,
d 5 @PR! @ 5 n
! # P0P1
!
0n! 0
@P0P1
! @ cos u 5n! # P0P1
!
0n! 0
n! # P0P1
!5 0n! 0 @P0P1
! @ cos u
@PR! @ 5 @P0P1
! @ cos u
cos u 5@PR
! @@P0P1
! @¢P0RP1,
y
z
x= (A, B, C)n
n
Q
R
p: Ax + By + Cz + D = 0
P0(x0, y0, z0)
P1(x1, y1, z1)
n!.P0P1
! @ PR! @
P0@PR! @
P0Q!P11x1, y1, z1 2Ax 1 By 1 Cz 1 D 5 0
P01x0, y0, z0 2Ax 1 By 1 Cz 1 D 5 0R3
R3
Ax 1 By 1 D 5 0 in R2.P01x0, y0, z0 2
Ax 1 By 1 C 5 0 in R2.P01x0, y0 2
9 . 6 D I S TA N C E F R O M A P O I N T TO A P L A N E58 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 58
or
Since is a point on and
Rearranging the formula
Therefore
Since the distance d is always positive, the formula is written as
d 50Ax0 1 By0 1 Cz0 1 D 0
ÏA2 1 B2 1 C2
d 521Ax0 1 By0 1 Cz0 1 D 2
ÏA2 1 B2 1 C2
d 52Ax0 2 By0 2 Cz0 2 D
ÏA2 1 B2 1 C2
d 52Ax0 2 By0 2 Cz0 1 Ax1 1 By1 1 Cz1
ÏA2 1 B2 1 C2.
Ax1 1 By1 1 Cz1 5 2D.Cz1 1 D 5 0Ax1 1 By1 1Ax 1 By 1 Cz 1 D 5 0,P11x1, y1, z1 2
d 5Ax1 2 Ax0 1 By1 2 By0 1 Cz1 2 Cz0
ÏA2 1 B2 1 C2
d 5 @PR! @ 5 1A, B, C 2 # 1x1 2 x0, y1 2 y0, z1 2 z0 2
ÏA2 1 B2 1 C2
Distance from a Point ( ) to the Plane with Equation
where d is the required distance between the
point and the plane.
In R3 d 50Ax0 1 By0 1 Cz0 1 D 0
ÏA2 1 B2 1 C2
Ax 1 By 1 Cz 1 D 5 0x0, y0, z0P0
EXAMPLE 1 Calculating the distance from a point to a plane
Determine the distance from to the plane with equation
SolutionTo determine the required distance, we substitute directly into the formula.
Therefore, d 5 08121 2 2 412 2 1 8124 2 1 3 0Ï82 1 124 2 2 1 82
50245 0
12 54512 5 3.75.
8z 1 3 5 0.8x 2 4y 1S121, 2, 24 2
C H A P T E R 9 59NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 59

The distance between and the given plane is 3.75.
It is also possible to use the distance formula to find the distance between twoparallel planes, as we show in the following example.
EXAMPLE 2 Selecting a strategy to determine the distance between two parallel planes
a. Determine the distance between the two planes and
b. Determine the equation of the plane that is equidistant from and
Solutiona. The two given planes are parallel because they each have the same normal;
In order to find the distance between and it is necessaryis to have a point on one of the planes and the equation of the second plane. Ifwe consider we can determine the coordinates of its z-intercept by letting
Substituting, or This meansthat the point lies on To find the required distance, apply theformula using and
Therefore
Therefore, the distance between and is 4.
In calculating the distance between these two planes, we used the coordinates ofthe z-intercept as our point on one of the planes. This point was chosen becauseit is easy to determine and leads to a simple calculation for the distance.
b. If we want to find the equation for the plane equidistant from and this planeis parallel to both planes and lies midway between them. Since the required planeis parallel to the two given planes, it must have the form with D to be determined. If we follow the same procedure for that we used inpart a., we can find the coordinates of the point associated with its z-intercept. Ifwe substitute into or Thismeans the point is on p2.Y10, 0, 28 2
z 5 28.210 2 2 10 2 1 2z 1 16 5 0,p2,x 5 y 5 0
p2
p:2x 2 y 1 2z 1 D 5 0
p2,p1
p2p1
d 50210 2 2 10 2 1 2122 2 1 16 0
Ï22 1 121 22 1 225024 1 16 0
35
12
35 4
p2: 2x 2 y 1 2z 1 16 5 0.X10, 0, 22 2p1.X10, 0, 22 2
z 5 22.210 2 2 10 2 1 2z 1 4 5 0x 5 y 5 0.p1,
p2,p1n!5 12, 21, 2 2 .
p2.p1
p2: 2x 2 y 1 2z 1 16 5 0.p1: 2x 2 y 1 2z 1 4 5 0
S121, 2, 24 2
9 . 6 D I S TA N C E F R O M A P O I N T TO A P L A N E60 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 60

The situation can be visualized in the following way.
The point T is on the required plane and is the midpointof the line segment joining to meaning that the point Thas coordinates To find D, we substitute the coordinates of T into which gives
Thus, the required plane has the equation We shouldnote, in this case, that the coordinates of its z-intercept are
We have shown how to use the formula to find the distance from a point to aplane. This formula can also be used to find the distance between two skew lines.
EXAMPLE 3 Selecting a strategy to determine the distance between skew lines
Determine the distance between and
SolutionMethod 1These two lines are skew lines because they are not parallel and do not intersect.In order to find the distance between the given lines, two parallel planes are constructed. The first plane is constructed so that lies on it, along with a second line that intersects it and has direction the direction vectorfor
In the same way, a second plane is constructed containing along with a secondline that intersects it and has direction the direction of L1.b
!5 11, 21, 1 2 ,
L2,
L2.a!5 11, 1, 2 2 ,
L1
t [ R.L2: r!5 10, 1, 0 2 1 t11, 1, 2 2 ,
s [ R,L1: r!5 122, 1, 0 2 1 s11, 21, 1 2 ,
10, 0, 25 2 .2x 2 y 1 2z 1 10 5 0.
D 5 10.210 2 2 10 2 1 2125 2 1 D 5 0,p,10, 0, 25 2 .
Y10, 0, 28 2 ,X10, 0, 22 2p: 2x 2 y 1 2z 1 D 5 0
z-axis
X(0, 0, –2)
Y(0, 0, –8)
T
p: 2x – y + 2z + D = 0
C H A P T E R 9 61NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 61
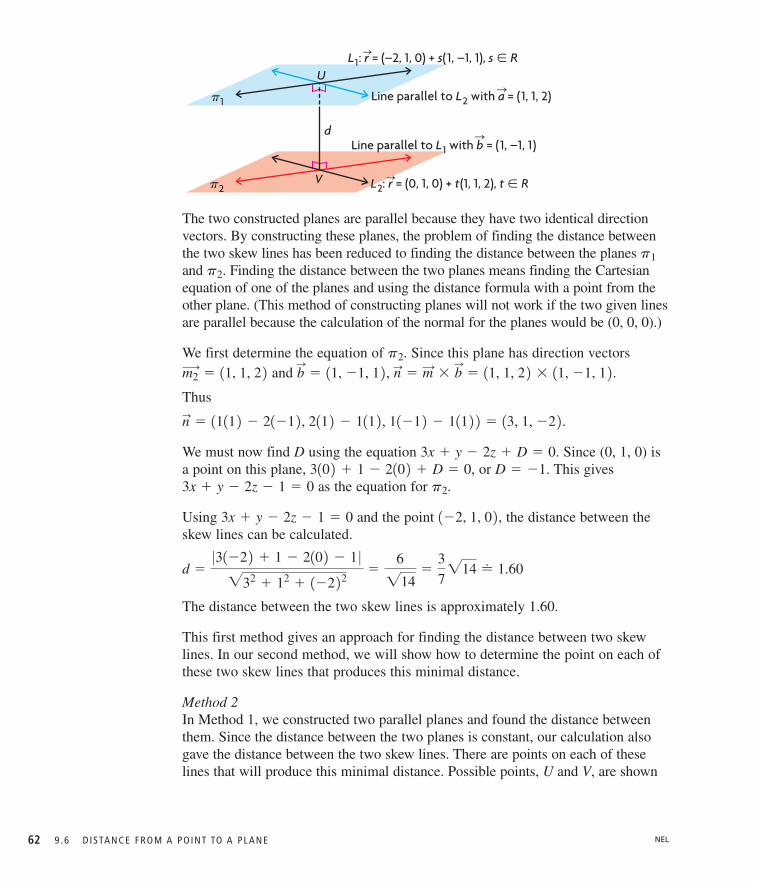
The two constructed planes are parallel because they have two identical directionvectors. By constructing these planes, the problem of finding the distance betweenthe two skew lines has been reduced to finding the distance between the planes and Finding the distance between the two planes means finding the Cartesianequation of one of the planes and using the distance formula with a point from theother plane. (This method of constructing planes will not work if the two given linesare parallel because the calculation of the normal for the planes would be (0, 0, 0).)
We first determine the equation of Since this plane has direction vectors and
Thus
We must now find D using the equation Since (0, 1, 0) isa point on this plane, or This gives
as the equation for
Using and the point the distance between theskew lines can be calculated.
The distance between the two skew lines is approximately 1.60.
This first method gives an approach for finding the distance between two skewlines. In our second method, we will show how to determine the point on each ofthese two skew lines that produces this minimal distance.
Method 2In Method 1, we constructed two parallel planes and found the distance betweenthem. Since the distance between the two planes is constant, our calculation alsogave the distance between the two skew lines. There are points on each of theselines that will produce this minimal distance. Possible points, U and V, are shown
d 503122 2 1 1 2 210 2 2 1 0
Ï32 1 12 1 122 225
6
Ï145
3
7Ï14 8 1.60
122, 1, 0 2 ,3x 1 y 2 2z 2 1 5 0
p2.3x 1 y 2 2z 2 1 5 0D 5 21.310 2 1 1 2 210 2 1 D 5 0,
3x 1 y 2 2z 1 D 5 0.
n!5 1111 2 2 2121 2 , 211 2 2 111 2 , 1121 2 2 111 2 2 5 13, 1, 22 2 .
n!5 m
!3 b
!5 11, 1, 2 2 3 11, 21, 1 2 .b
!5 11, 21, 1 2 ,m2
!5 11, 1, 2 2
p2.
p2.p1
L1: r = (–2, 1, 0) + s(1, –1, 1), s [ R
L2: r = (0, 1, 0) + t(1, 1, 2), t [ R
Line parallel to L1 with b = (1, –1, 1)
Line parallel to L2 with a = (1, 1, 2)p1
p2V
U
d
9 . 6 D I S TA N C E F R O M A P O I N T TO A P L A N E62 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 62

on the diagram for Method 1. To determine the coordinates of these points, wemust use the fact that the vector found by joining the two points is perpendicular tothe direction vector of each line.
We start by writing each line in parametric form.
For
For
The point with coordinates represents a general point on and represents a general point on We next calculate
represents a general vector with its tail on and its head on
In order to find the points on each of the two lines that produce the minimal distance, we must use the following, and since must be perpendicular to each of the two planes.
Therefore,
or (Equation 1)and,
or (Equation 2)This gives the following system of equations.
If we substitute into equation , or
We now substitute and into the equations for each line to find therequired points.
For
Therefore, the required point on is
For
Therefore, the required point on is Q217, 6
7, 227R .L2
z 5 2Q217 R 5 2
27.y 5 1 1 Q21
7 R 567,x 5 2
17,L2,
Q2107 , 3
7, 47R .L1
z 547.y 5 1 2
47 5
37,x 5 22 1
47 5 2
107 ,L1,
t 5 217s 5
47
s 547.3Q21
7R 2 s 5 211t 5 217
t 5 21
7
21123 327t 5 1,2t 2 3s 5 222
3t 2 s 5 211
3t 2 s 5 2111t 2 s 1 2 2 1 11t 1 s 2 1 212t 2 s 2 5 011, 1, 2 2 # 1t 2 s 1 2, t 1 s, 2t 2 s 2 5 0
2t 2 3s 5 2211t 2 s 1 2 2 2 11t 1 s 2 1 112t 2 s 2 5 011, 21, 1 2 # 1t 2 s 1 2, t 1 s, 2t 2 s 2 5 0
UV!
m2! # UV
!5 0,m1
! # UV!5 0
L2.L1UV!
UV!5 1t 2 122 1 s 2 , 11 1 t 2 2 11 2 s 2 , 2t 2 s 2 5 1t 2 s 1 2, t 1 s, 2t 2 s 2
UV!.L2.V1t, 1 1 t, 2t 2L1,
U122 1 s, 1 2 s, s 2m2
!5 11, 1, 2 2 .z 5 2t,y 5 1 1 t,x 5 t,L2,
m1!5 11, 21, 1 2 .z 5 s,y 5 1 2 s,x 5 22 1 s,L1,
C H A P T E R 9 63NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 63

The required distance between the two lines is the distance between these two
points. This distance is
Thus the distance between the two skew lines is or approximately 1.60.
The two points that produce this distance are on and on
INVESTIGATION A. In this section, we showed that the formula for the distance d from a pointto the plane with equation is
.
By modifying this formula, show that a formula for finding the distance from
to the plane is .
B. Determine the distance from to the plane with equation
C. Determine the distance between the planes with equationsand
D. Determine the coordinates of a point that is equidistant from and
E. Determine an equation for a plane that is equidistant from and
F. Determine two values for D if the plane with equation is 4 units away from the plane with equation
G. Determine the distance between the two planesand p4: 20x 1 4y 2 5z 1 147 5 0.p3: 20x 1 4y 2 5z 2 105 5 0
20x 1 4y 2 5z 5 0.20x 1 4y 2 5z 1 D 5 0
p2.p1
p2.p1
p2: 20x 1 4y 2 5z 1 105 5 0.p1: 20x 1 4y 2 5z 1 21 5 0
20x 1 4y 2 5z 1 21 5 0.O10, 0, 0 2
d 50D 0
VA2 1 B2 1 C2Ax 1 By 1 Cz 1 D 5 0O10, 0, 0 2
d 50Ax0 1 By0 1 Cz0 1 D 0
VA2 1 B 2 1 C 2
Ax 1 By 1 Cz 1 D 5 0P01x0, y0, z0 2
L2.Q21
7, 67, 2
27RL1Q210
7 , 37, 4
7R
37 Ï14
53
7Ï14
5 Ï 9 3 14
49
5 Ï 126
49
5 Ï 81
491
9
491
36
49
5 Ï a29
7b
2
1 a23
7b
2
1 a 6
7b
2
ÏQ2107 1
17R
21 Q37 2
67R
21 Q47 1
27R
2
9 . 6 D I S TA N C E F R O M A P O I N T TO A P L A N E64 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 64

H. Determine the distance between the following pairs of planes.
a. and
b. and
c. and
I. If two planes have equations andexplain why the formula for the distance d
between these planes is d 50D1 2 D2 0
ÏA2 1 B2 1 C2.
Ax 1 By 1 Cz 1 D2 5 0,Ax 1 By 1 Cz 1 D1 5 0
12x 1 3y 1 4z 1 26 5 012x 1 3y 1 4z 2 26 5 0
6x 2 3y 1 2z 1 35 5 06x 2 3y 1 2z 1 14 5 0
2x 2 2y 1 z 2 12 5 02x 2 2y 1 z 2 6 5 0
IN SUMMARY
Key Ideas
• The distance from a point to the plane with equationis
where d is the required distance.
Need to know
• The distance between skew lines can be calculated using two differentmethods.
Method 1
To find the distance between the given skew lines, two parallel planes areconstructed. Determine the distance between the two planes.
Method 2
To determine the coordinates of the points that produce the minimaldistance, we use the fact that the general vector found by joining the twopoints is perpendicular to the direction vector of each line.
d 50Ax0 1 By0 1 Cz0 1 D 0
ÏA2 1 B2 1 C2
Ax 1 By 1 Cz 1 D 5 0P01x0,y0,z02
Exercise 9.6
PART A1. A student is calculating the distance d between the point and the
plane with equation and obtains the following.
a. Has the student done the calculation correctly? Explain.
b. What is the significance of the answer “0”? Explain.
d 502123 2 1 2 1 211 2 1 2 0
Ï22 1 12 1 225
03 5 0
2x 1 y 1 2z 1 2 5 0A123, 2, 1 2C
C H A P T E R 9 65NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 65

PART B2. Determine the following:
a. the distance from to the plane with equation
b. the distance from to the plane with equation
c. the distance from to the plane with equation
d. the distance from to the plane with equation
e. the distance from to the plane with equation
3. For the planes and determine the following:
a. the distance between and
b. an equation for a plane midway between and
c. the coordinates of a point that is equidistant from and
4. Determine the following:
a. the distance from to the plane with equation
b. the distance from to the plane with equation
c. the distance from to the plane with equation
5. The three points and lie on the sameplane. Determine the distance from to the plane containing thesethree points.
6. The distance from to the plane with equation is 3. Determine all possible value(s) of A for which this is true.
7. Determine the distance between the lines and
PART C8. a. Calculate the distance between the lines
and
b. Determine the coordinates of points on each of these lines that produce theminimal distance between and L2.L1
t [ R.L2: r!5 11, 21, 22 2 1 t11, 0, 21 2 ,s [ R,
L1: r!5 11, 22, 5 2 1 s10, 1, 21 2 ,
t [ R.r!5 10, 0, 1 2 1 t11, 1, 0 2 ,
s [ R,r!5 10, 1, 21 2 1 s13, 0, 1 2 ,
Ax 2 2y 1 6z 5 0R13, 23, 1 2
P11, 21, 1 2C113, 4, 21 2B123, 21, 2 2A11, 2, 3 2 ,
z 1 1 5 0R11, 0, 1 2x 2 3 5 0Q121, 1, 4 2y 1 3 5 0P11, 1, 23 2
p2p1
p2p1
p2p1
39 5 0,p2: 3x 1 4y 2 12z 1p1: 3x 1 4y 2 12z 2 26 5 0
18x 2 9y 1 18z 2 11 5 0E121, 0, 1 2
5x 2 12y 5 0D11, 0, 0 23x 2 4y 2 1 5 0C15, 1, 4 2
8 5 02x 1 y 1 2z 2B10, 21, 0 2
20x 2 4y 1 5z 1 7 5 0A13, 1, 0 2
K
A
T
9 . 6 D I S TA N C E F R O M A P O I N T TO A P L A N E66 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 66

A pipeline engineer needs to find the line that will allow a new pipeline tointersect and join an existing pipeline at a right angle. The existing line has apathway determined by the equation Thenew pipeline will also need to be exactly 2 units away from the point (4, 0, 2).
a. Determine the vector and parametric equations of the line passing through (4, 0, 2) that is perpendicular to
b. Determine the vector and parametric equations of the line that isparallel to and is 2 units away from (4, 0, 2). There will be exactly twolines that fulfill this condition.
c. Plot each line on the coordinate axes.
L3
L1,
L2.L3,
d [ R.L2: r 5 11, 1, 1 2 1 d10, 2, 3 2 ,
CAREER LINK WRAP-UP Investigate and Apply
CHAPTER 9: RELATIONSHIPS BETWEEN POINTS, LINES, AND PLANES: PIPELINECONSTRUCTION ENGINEER
x
z
y(4, 0, 2)
(1, 1, 1)
(1, 3, 4)
System of EquationsGeometric Interpretation
Possible Points ofIntersection
Two equations and two unknowns Two lines in R2 0, 1 or an infinite number
Two equations and three unknowns Two planes in R3 0 or an infinite number
Three equations and three unknowns Three planes in R3 0, 1 or an infinite number
To make a connection between the algebraic equations and the geometrical positionand orientation of lines or planes in space, draw graphs or diagrams and compare thedirection vectors of lines and the normals of planes. This will help you decide if thesystem is consistent or inconsistent and which case you are dealing with.
Distances between lines and planes can be determined using the formulas developedin this chapter.
Distance between a point and a line in R2 d 50Ax0 1 By0 1 C 0
ÏA2 1 B2
Distance between a point and a line in R3 d 50m!
3 QP! 0
0m! 0Distance between two planes in R3 d 5
0Ax0 1 By0 1 Cz0 1 D 0ÏA2 1 B2 1 C2
C H A P T E R 9 67NEL
Key Concepts Review
In this chapter you learned how to solve systems of equations using elementaryoperations. The number of equations and the number of variables in the system isdirectly related to the geometric interpretation that each system represents.
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 4:12 PM Page 67

R E V I E W E X E R C I S E68 NEL
Review Exercise
1. The lines and all pass through acommon point. Determine the value of k.
2. Solve the following system of equations.
3. Solve the following systems of equations.
a. b.
4. a. Show that the points and all lieon the same plane.
b. Determine the distance from the origin to the plane found in 4. a.
5. Determine the distance in each of the following:
a. from to the plane with equation
b. from to the plane with equation
6. Determine the intersection of the plane with
7. Solve the following systems of equations.
a.
b.
c.
12x 2 9y 1 6z 5 13
8x 2 6y 1 4z 5 42
4x 2 3y 1 2z 5 21
5x 1 y 2 z 5 13
4x 1 6y 1 8z 5 42
2x 1 3y 1 4z 5 31
9x 2 12y 1 15z 5 93
6x 2 9y 1 10z 5 92
3x 2 4y 1 5z 5 91
t12, 21, 2 2 , t [ R.r!5 13, 1, 1 2 1
3x 2 4y 2 5z 5 0
8x 2 8y 1 4z 2 7 5 0B13, 1, 22 23x 2 4y 2 12z 2 8 5 0A121, 1, 2 2
123, 5, 6 211, 2, 6 2 , 17, 25, 1 2 , 11, 1, 4 2 ,x 2 y 1 z 5 10032x 2 2y 1 z 5 113
x 1 y 2 z 5 9822x 2 2y 1 3z 5 12
x 1 y 1 z 5 3001x 2 y 1 2z 5 31
x 1 2y 5 2193
3x 1 2y 5 262
x 2 y 5 131
3x 1 ky 5 382x 2 y 5 31, x 1 8y 5 234,
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 68

C H A P T E R 9 69
8. Solve the following systems of equations.
a.
b.
c.
9. Solve each of the following systems.
a. b.
10. Determine the intersections for the planes in each of the following anddescribe your answer geometrically.
a. and
b. and
c. and
11. The line intersects the xz-plane at thepoint P and the xy-plane at the point Q. Calculate the length of the linesegment PQ.
12. a. Given the line and the planeverify that the line lies on the plane.
b. Determine the point of intersection between the line and the line given in 12. a.
c. Show that the point of intersection of the lines is a point on the plane givenin 12. a.
d. Determine the Cartesian equation of the plane that contains the lineand is perpendicular to the plane given in 12. a.
13. a. Determine the distance from the point to the line with equation
b. What are the coordinates of the point on the line that produces this shortestdistance?
r!5 13, 0, 21 2 1 t11, 1, 2 2 , t [ R.
A122, 1, 1 2r!5 17, 5, 21 2 1 t14, 3, 2 2
t [ R,r!5 17, 5, 21 2 1 t14, 3, 2 2 ,
x 2 2y 1 z 1 4 5 0,r!5 13, 1, 25 2 1 s12, 1, 0 2 , s [ R,
r!5 12, 21, 22 2 1 s11, 1, 22 2 , s [ R,
9x 1 2y 2 z 5 02x 1 y 2 z 5 0, x 2 2y 1 3z 5 0,
x 2 3y 1 5z 5 42x 2 y 1 2z 5 2, 3x 1 y 2 z 5 1,
3x 1 y 5 22x 1 y 1 z 5 6, x 2 y 2 z 5 29,
2x 1 7y 1 2z 5 436x 2 3y 1 8z 5 63
4x 1 2y 1 5z 5 526x 1 2y 2 z 5 22
2x 2 5y 1 3z 5 113x 2 5y 1 2z 5 41
2x 1 3y 2 3z 5 273
2x 2 6y 1 6z 5 142
x 2 3y 1 3z 5 71
x 2 2y 2 3z 5 43
2x 1 4y 1 6z 5 42
4x 2 8y 1 12z 5 41
6x 1 8y 1 2z 5 83
5x 1 2y 1 3z 5 22
3x 1 4y 1 z 5 41
NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 69

14. You are given the lines, , and
a. Determine the coordinates of their point of intersection.
b. Determine a vector equation for the line perpendicular to both of the givenlines and that passes through their point of intersection.
15. a. Determine the equation of the plane containing and the point
b. Determine the distance from to the plane you found in 15. a.
16. Consider this system of equations.
a. Determine the value(s) of k for which the solution to this system is a line.
b. Determine the vector equation of this line.
17. Determine the solution to the following systems of equations.
a. b.
18. Solve the following system of equations for a, b, and c.
Hint: Let and
19. Determine the point of intersection of the line andthe plane with equation
20. The point with coordinates is reflected on the plane with equationDetermine the coordinates of the image point.x 2 y 1 z 2 1 5 0.
A11, 0, 4 2x 1 2y 2 3z 1 10 5 0.
x 1 124 5
y 2 23 5
z 2 122
Rz 5cb.x 5
ab, y 5 b,Q
3a
b1 4b 2
4c
b5 33
23a
b1 4b 1
4c
b5 32
9a
b2 8b 1
3c
b5 41
6x 2 14y 1 4z 5 044x 1 y 1 z 5 84
3x 2 7y 1 2z 5 033x 1 5y 1 4z 5 53
2x 2 5y 1 z 5 2122x 2 3y 2 z 5 62
x 2 2y 1 z 5 11x 1 2y 1 z 5 11
7x 2 7y 2 z 5 k3
2x 2 5y 1 z 5 212
x 1 y 2 z 5 11
S11, 1, 21 2K13, 22, 4 2 .s11, 2, 21 2 , s [ R,L : r
!5 11, 2, 23 2 1
r!5 122, 23, 0 2 1 s11, 2, 3 2 , s [ R.
r!5 11, 21, 1 2 1 t13, 2, 1 2 , t [ R
R E V I E W E X E R C I S E70 NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 70

21. The three planes with equations and do not intersect.
a. Considering the planes in pairs, determine the three lines of intersection.
b. Show that these three lines are parallel.
22. Solve for a, b, and c in the following system of equations.
23. Determine the equation of a parabola having its axis parallel to the y-axis andpassing through the points and (2, 1). (Note that the generalparabola parallel to the y-axis is of the form )
24. A perpendicular line is drawn from to the planeand meets the plane at point M. Determine the
coordinates of M.
25. Determine the value of A, B, and C if the following is true:
Hint: Simplify the right side by combining fractions and comparing numerators.
26. A line L is drawn through D perpendicular to the line segment EF and meetsthe line segment at J.
a. Determine an equation for the line containing the line segment EF.
b. Determine the coordinates of the point J on EF.
c. Determine the area of triangle DEF.
27. Determine the equation of the plane through that is perpendicular tothe line of intersection of the planes and 4x 1 3y 1 7 5 0.3x 2 2z 1 1 5 0
15, 25, 5 2
D (3, 0, 7)
F(–1, –4, –6)
E(4, 0, –3)
L
J
11x2 2 14x 1 9
13x 2 1 2 1x2 1 1 2 5A
3x 2 11
Bx 1 C
x2 1 1
4x 2 5y 1 z 2 9 5 0X13, 2, 25 2
y 5 ax2 1 bx 1 c.121, 2 2 , 11, 21 2 ,
9
a2 25
b2 14
c2 5 673
3
a2 26
b2 21
c2 5 232
2
a2 15
b2 13
c2 5 401
x 1 2y 1 3z 2 4 5 04x 2 12y 1 4z 2 24 5 0,3x 1 y 1 7z 1 3,
C H A P T E R 9 71NEL
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 71

1. a. Determine the point of intersection for the lines having equationsand
b. Verify that the intersection point of these two lines is on the plane
2. a. Determine the distance from to
b. Determine the distance between the planes and
3. a. Determine the equation of the line of intersection L between the planesand
b. Determine the point of intersection between L and the xz-plane.
4. a. Solve the following system of equations.
b. Explain what the result means geometrically.
5. a. Solve the following system of equations.
b. Explain what the result means geometrically.
6. The three planes and intersect in a line.
a. Determine the values of m and n for which this is true.
b. What is the equation of this line?
7. Determine the distance between the skew lines with equationsand
L2: r!5 125, 5, 28 2 1 t11, 2, 5 2 , t [ R.
L1: r!5 121, 23, 0 2 1 s11, 1, 1 2 , s [ R,
2x 2 y 1 mz 5 nx 1 2y 1 2z 5 1,x 1 y 1 z 5 0,
x 2 5y 1 4z 5 233
2x 1 2y 2 z 5 02
x 2 y 1 z 5 211
1
2x 1
2
5y 1
1
4z 5 2
1
23
2x 1 3y 2 2z 5 2212
x 2 y 1 z 5 101
p2: 2x 1 y 1 z 5 1.p1: 2x 1 3y 2 z 5 3
p2: 2x 2 y 1 2z 1 24 5 0.p1: 2x 2 y 1 2z 2 16 5 0
p: 8x 2 8y 1 4z 2 7 5 0.A13, 2, 3 2x 2 y 1 z 1 1 5 0.
r!5 15, 21, 4 2 1 t12, 0, 9 2 , t [ R.r
!5 14, 2, 6 2 1 s11, 3, 11 2 , s [ R,
C H A P T E R 9 T E S T72 NEL
Chapter 9 Test
08-037_09_AFSB_Ch09_pp2.qxd 5/27/08 2:27 PM Page 72