
Escuela Técnica Superior de Ingenieros de TelecomunicaciónUniversidad de Las Palmas de Gran Canaria
TRANSDUCTORESDIGITALES
Juan A. Montiel-Nelson
05/10/2004 Transductores Digitales 2
Indice
05/10/2004 Transductores Digitales 3
Introducción
Interés por los transductores digitales• La creciente presencia de sistemas digitales por el tratamiento y
presentación de la información en los sistemas de medida y control, hace muy atractivos aquellos transductores que ofrecen directamente a su salida una señal en forma digital, por la simplicidad que suponen en el acondicionamiento de señales y su mayor inmunidad a las interferencia electromagnéticas
Clasificación– Codificadores de posición
• Ofrecen directamente una señal digital a partir de una entrada analógica
– Transductores de frecuencia variable• Se basan en un fenómeno físico de tipo oscilatorio, transducido
posteriormente por in transductor modulados convencional
05/10/2004 Transductores Digitales 4
Codificadores de posición
Introducción• La medida de posiciones lineales y angulares ha sido hasta el
momento el único campo con abundantes desarrollos comerciales detransductores con salida digital, incluso antes de la era del microprocesador
Codificadores incrementales– Principio de funcionamiento
• En un codificador de posición incremental hay in elemento lineal o un disco con poca inercia que se desplaza solidario a la pieza cuyaposición se desea determinar

05/10/2004 Transductores Digitales 5
Codificadores de posición
Codificadores Incrementales– Principio de funcionamiento

05/10/2004 Transductores Digitales 6
Codificadores de posición
Codificadores incrementales– Limitaciones
• Interrupciones e interferencias– Cuando falla la alimentación del sistema, o simplemente cuando
se desconecta, y en presencia de interferencias fuertes• Contador bidireccional
– A fin de tener una salida digital compatible con los elementos de entrada-salida de un ordenador
• Sentido de avance

05/10/2004 Transductores Digitales 7
Codificadores de posición
Codificadores incrementales– Tipos y materiales
• Codificadores inductivos

05/10/2004 Transductores Digitales 8
Codificadores de posición
Codificadores incrementales– Tipos y materiales
• Codificadores basados en efecto Hall

05/10/2004 Transductores Digitales 9
Codificadores de posición
Codificadores incrementales– Tipos y materiales
• Codificadores eléctricos
05/10/2004 Transductores Digitales 10
Codificadores de posición
Codificadores incrementales– Tipos y materiales
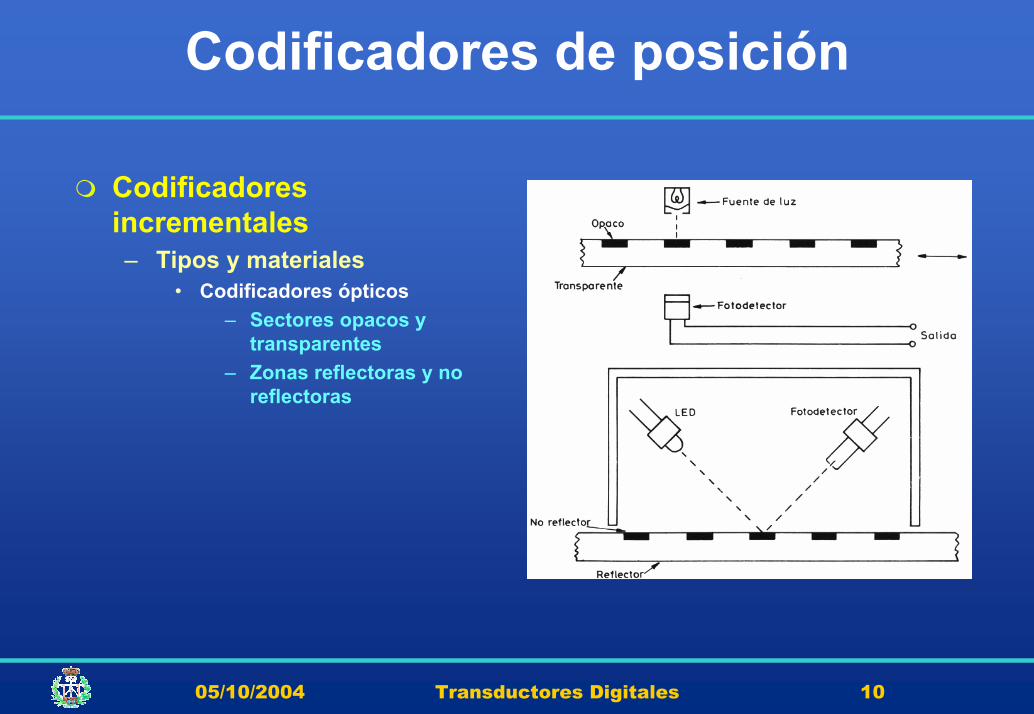
• Codificadores ópticos– Sectores opacos y
transparentes– Zonas reflectoras y no
reflectoras

05/10/2004 Transductores Digitales 11
Codificadores de posición
Codificadores incrementales– Tipos y materiales
• Codificadores ópticos– Basado en franjas de
interferencias

05/10/2004 Transductores Digitales 12
Codificadores de posición
Codificadores incrementales– Tipos y materiales
• Codificadores ópticos

05/10/2004 Transductores Digitales 13
Codificadores de posición
Codificadores incrementales– Tipos y materiales
• Codificadores ópticos– Determinación del sentido de avance

05/10/2004 Transductores Digitales 14
Codificadores de posición
Codificadores incrementales– Resolución
• Codificadores incrementales angulares– 100 a 6000 cuentas/vuelta– Varias salidas senoidales desfasadas se multiplica por 100– Diámetros de 25mm a 90mm
• Codificadores ópticos– Mayor resolución– Limitación de acuerdo con el tamaño del fotodetector– Disposición de una o varias rejillas

05/10/2004 Transductores Digitales 15
Codificadores de posición
Codificadores absolutos– Principio de funcionamiento
• Ofrecen a su salida una señal codificada correspondiente a la posición de un elemento móvil, regla o disco, con respecto a unareferencia interna
• El elemento móvil dispone de zonas con una propiedad que las distingue, y a las que se asigna un valor binario
• Hay varias pistas con zonas diferenciadas y están agrupadas de talforma que el sistema de lectura obtiene directamente en cada posición del elemento móvil el número codificado que da su posición

05/10/2004 Transductores Digitales 16
Codificadores de posición
Codificadores absolutos– Principio de funcionamiento
05/10/2004 Transductores Digitales 17
Codificadores de posición
Codificadores absolutos– Tipos y materiales
• Sensores ópticos con zonas opacas y transparentes• Los de contacto con zonas conductoras o aislantes
– Ventajas• Inmunidad frente a interrupciones e interferencias
– El código ofrecido a su salida no puede estar formado por bits correspondientes a dos posiciones contiguas
– Ejemplo de uso de código binario natural, en un sistema con 8 bits donde las posiciones 3 y 4 vienen dadas por• Posición 3 => 0 0 0 0 0 0 1 1• Posición 4 => 0 0 0 0 0 1 0 0 • Posición => 0 0 0 0 0 0 0 0
05/10/2004 Transductores Digitales 18
Codificadores de posición
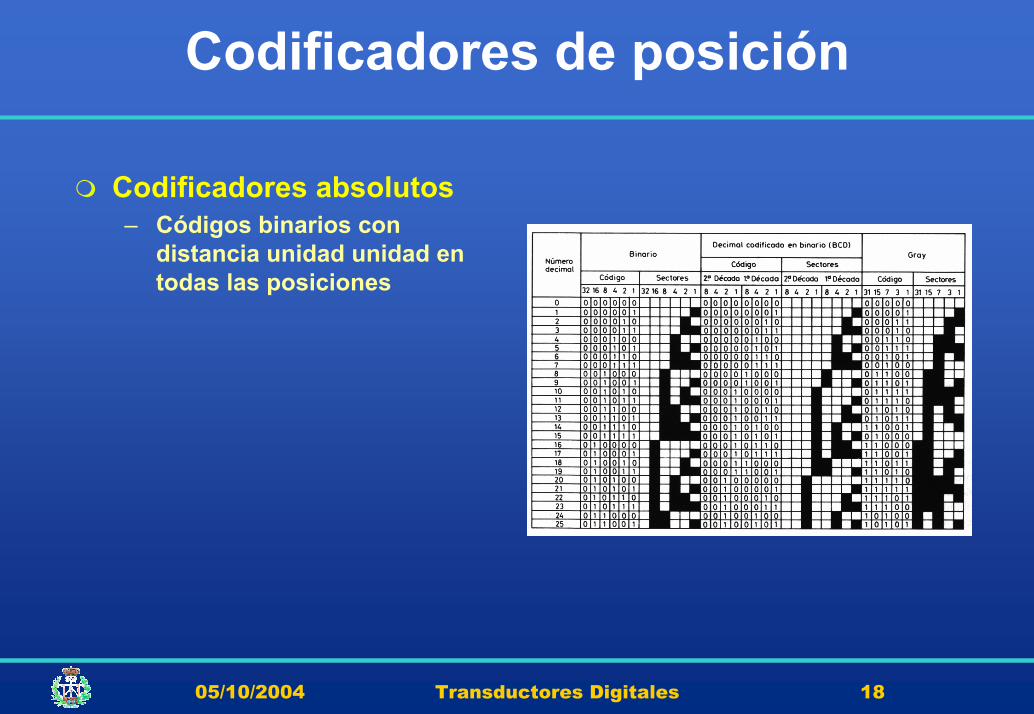
Codificadores absolutos– Códigos binarios con
distancia unidad unidad en todas las posiciones

05/10/2004 Transductores Digitales 19
Codificadores de posición
Codificadores absolutos– Disco codificador digital

05/10/2004 Transductores Digitales 20
Codificadores de posición
Codificadores absolutos– Disposición de un doble juego de cabezales de lecturas
desplazados entre sí una distancia determinada• Empleando una regla de decisión para aceptar la lectura de uno u otro
sensor– Disponer una marca en el centro de cada sector
• Aceptando la lectura del cabezal sólo cuando hay garanatía de estar en una zona que no es de transición entre dos posiciones
• Una memoria almacena la última lectura y se actualiza cuando hay un cambio válido
05/10/2004 Transductores Digitales 21
Codificadores de posición
Codificadores absolutos– Resolución
• En código Gray de 6 a 16 bits– Con diámentros de 50 a 175 mm para codificadores angulares
• Aumento de resolución– Incremento del número de pistas codificadas– Añadir otro codificador– Sistema nonio utilizado en los codificadores incrementales
• Añadir otr apista adiional en dirección radial en la parte más externa del disco
– Aplicaciones• Control de posiciones lineales y angulares• Medidas indirectas

05/10/2004 Transductores Digitales 22
Transductores de frecuencia variable
Introducción– Principio de funcionamiento
• Basados en un fenómeno físico resonante que ofrecen una frecuencia de salida que depende de una magnitud de intere´s que afecta a la frecuencia de oscilación
• Requieren el empleo de un frecuencímetro-contador para medir bien la frecuencia, bien el período de oscilación.
• Se emplean tanto osciladores armónicos como de relajación– Osciladore armónicos donde hay energía almacenada que cambia
de una a otra forma de almacenamiento– Osciladores de relajación donde hay una única forma de
almacenamiento, y la energía almacenada se disipa periódicamente mediante algún mecanismo de puesta a cero
05/10/2004 Transductores Digitales 23
Transductores de frecuencia variable
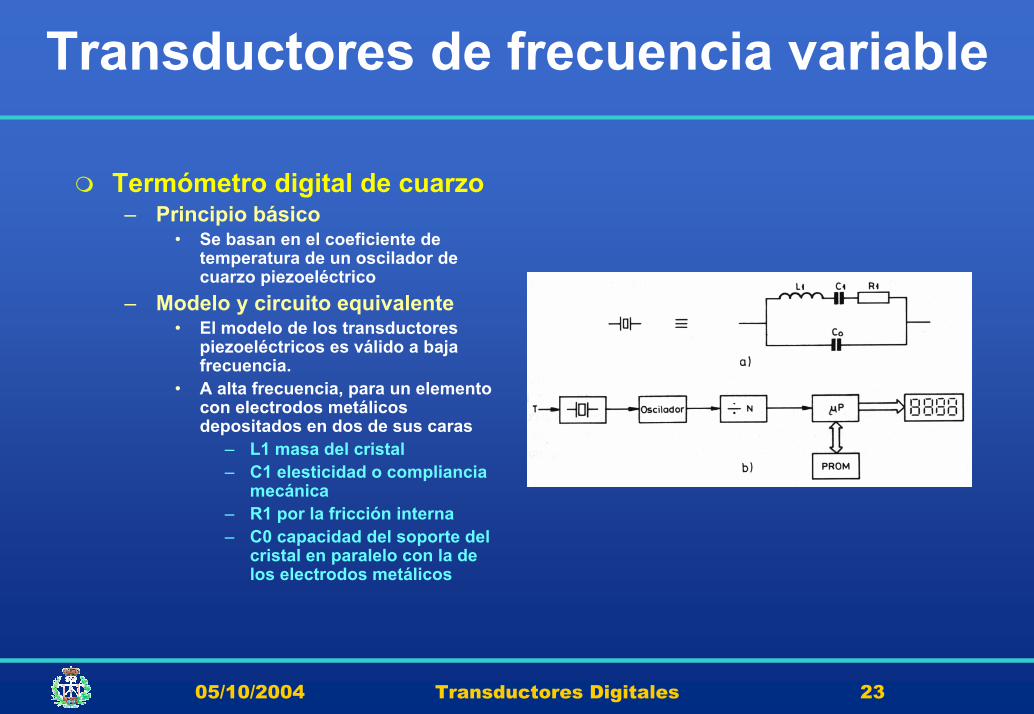
Termómetro digital de cuarzo– Principio básico
• Se basan en el coeficiente de temperatura de un oscilador de cuarzo piezoeléctrico
– Modelo y circuito equivalente• El modelo de los transductores
piezoeléctricos es válido a baja frecuencia.
• A alta frecuencia, para un elemento con electrodos metálicos depositados en dos de sus caras– L1 masa del cristal– C1 elesticidad o compliancia
mecánica– R1 por la fricción interna– C0 capacidad del soporte del
cristal en paralelo con la de los electrodos metálicos

05/10/2004 Transductores Digitales 24
Transductores de frecuencia variable
Termómetro digital de cuarzo– Modelo y circuito equivalente
• L1=4451 H, C1 0 5 fF, R1 = 11,2 kΩ y C0 = 1,84 pF => 32,768 kHz
• Linealidad• Repetibilidad
– Variantes y aplicaciones• Influencia de la masa en la frecuencia de oscilación• Medida de humedad
– Se recubre el cristal con un material higroscópico
( ) ( ) ( )[ ];1 30
2000 TTcTTbTTaff −+−+−+=

05/10/2004 Transductores Digitales 25
Transductores de frecuencia variable
Galgas acústicas– Principio básico
• Frecuencia de oscilación transversal de una cuerda o hilo tenso vibrante– Longitud l– Fuerza mecánica F– Densidad longitudinal m
• Medida de deformaciones– Módulo de Young– Sección transversal
• Frecuencia de oscilación– Se mide con un transductor de reluctancia variable, y cae dentro
de la banda audible
;21 2/1
=mF
lf
;4 22
fESml
=ε
05/10/2004 Transductores Digitales 26
Transductores de frecuencia variable
Galgas acústicas– Principio básico
• Se dispone de un sistema autooscilante en el que la señal detectada es amplificada y realimentada a un excitador electromagnético
• A veces el propio excitador actúa alternativamente como detector• El factor de calida Q del resonador mecánico debe ser del orden de
1000 osuperior– De esta forma la frecuencia de oscilación no depende de la
características eléctricas del excitador– Aplicaciones
• Medida de deformaciones• Medida de desplazamientos, presión, fuerza, peso y masa

05/10/2004 Transductores Digitales 27
Transductores de frecuencia variable
Galgas acústicas– Aplicaciones
• Variante de cintas vibrantes– Longitud l– Módulo de Young E– Densidad δ
• Medida de la masa de polvo depositado– Excitador y detecor son ambos piezoeléctricos
;21 2/1
=δE
lf

05/10/2004 Transductores Digitales 28
Transductores de frecuencia variable
Galgas acústicas– Aplicaciones
• Variante de cintas vibrantes– Longitud l– Módulo de Young E– Densidad δ
• Medida de la masa de polvo depositado– Excitador y detecor son
ambos piezoeléctricos
05/10/2004 Transductores Digitales 29
Transductores de frecuencia variable
Transductores basados en cilindros vibrantes– Principio básico
• Si en lugar de un hilo o una cinta vibrante se emplea un cilindro metálico con paredes delgadas (75 um) y un extremo ciego, la frecuencia de oscilación dependerá de las dimensiones y material del cilindro y de cualquier masa que vibre con sus paredes
• Utilizando un excitador electromagnético para mantener la oscilación, se puede medir la diferencia de presión entre las dos caras del cilindro– La diferencia de presión entre ambos lados de las paredes
produce una tensión mecánica entre éstas.

05/10/2004 Transductores Digitales 30
Transductores de frecuencia variable
Transductores basados en cilindros vibrantes– Método del tubo vibrante
05/10/2004 Transductores Digitales 31
Transductores de frecuencia variable
Transductores basados en cilindros vibrantes– Aplicaciones
• Medidas de densidades de un gas• Medidas de densidades de líquidos
– Método del tubo vibrante• Consiste en dos conductores en paralelo, sujetos en cada
extermo a una base fija y acoplados al conducto principal con unajunta felxible en cada extremo
• Frecuencia de oscilación de la tubería sin líquido f0
• Constante geométrica del sistema δ0
;1
2/1
0
0
+
=
δδ
ff

05/10/2004 Transductores Digitales 32
Transductores de frecuencia variable
Transductores basados en ondas superficiales– Principio básico
• Las ondas superficiales en la superficie de un líquido al producir en ella una perturbación se producen también en la superficie de sólidos
• Lord Rayleigh 1885– Aplicacíón a los sismogramas
• Forma de producir una perturbación en la superficie de un sólido– Disponer dos electrodos metálicos interdigitaods en la superficie
de un material piezoeléctrico

05/10/2004 Transductores Digitales 33
Transductores de frecuencia variable
Transductores basados en ondas superficiales– Esquema de principio de los
filtros de onda de superficie• Excitación
– Distancia entre electrodos d
– Tensión alterna de frecuencia f
– Deformación superficial• Velocidad v propia
del material• Velocida v=2fd
• Detección– Tensión alterna de salida

05/10/2004 Transductores Digitales 34
Transductores de frecuencia variable
Transductores basados en ondas superficiales– Modelo equivalente
• La velocidad v de laonda superficial depende del estado de deformaciones en la superficie y de la temperatura– Dado que éstas dependen del estado de deformaciones en la
superficie y de la temperatura– Afectan a la densidad y propiedades elásticas del material– Alteran la distancia entre electrodos
• Desfase total en el lazo de realimentación
;/2;
0
00
vfLexT
Π=±±=
φφδφφφ

05/10/2004 Transductores Digitales 35
Transductores de frecuencia variable
Transductores basados en ondas superficiales– Modelo equivalente
• Desfase total en el lazo de realimentación– Desfase por el tiempo de tránsito de la onda desde un par de
electrodos al otro– Incremento de fase producido por la deformación del sustrato y el
cambio de temperatura– Desfase debido debido al amplificador y la red de adaptación de
impedancias externa– Aplicaciones
• Medidas de temperaturas• Medida de variables mecánicas: fuerza, presión y aceleración







