T-UGOm :the Toulouse Unstructured
Grid Ocean model
F. Lyard 1, C. Nguyen 1, C. Mayet 1, Y. Soufflet 1
D. Greenberg 2, F. Dupont 3
1LEGOS, CNRS, Toulouse2BIO, Halifax, Nova Scottia
3Environement Canada, Montreal
T-UGOm 2D/3D model
η,υυυυ
η,υυυυ
η,υυυυ
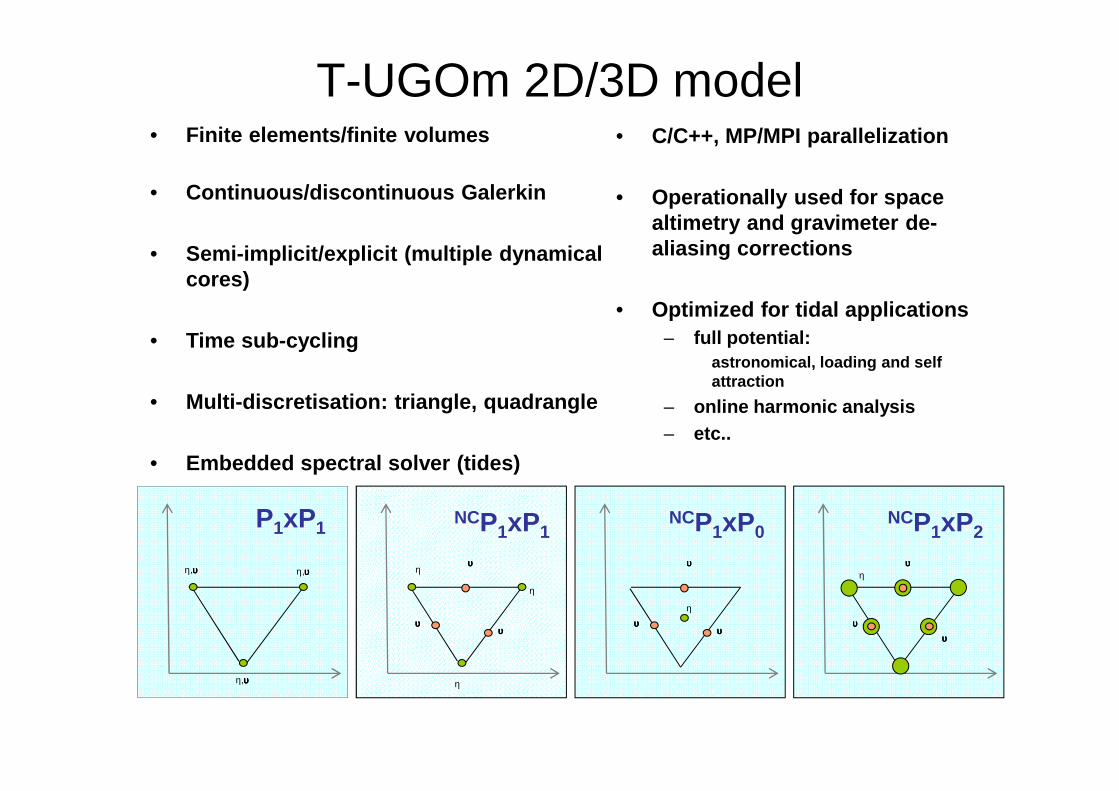
P1xP1
η
η
ηυυυυ
υυυυυυυυ
NCP1xP1
η
υυυυ
υυυυυυυυ
NCP1xP0
ηυυυυ
υυυυυυυυ
NCP1xP2
• Finite elements/finite volumes
• Continuous/discontinuous Galerkin
• Semi-implicit/explicit (multiple dynamical cores)
• Time sub-cycling
• Multi-discretisation: triangle, quadrangle
• Embedded spectral solver (tides)
• C/C++, MP/MPI parallelization
• Operationally used for space altimetry and gravimeter de-aliasing corrections
• Optimized for tidal applications– full potential:
astronomical, loading and self attraction
– online harmonic analysis– etc..

Sub-cycling: complementary to variable space resolution
• Automatic or constrained sub-cycling
First subcycling level
Second sub-cycling level
4 to 20 km ocean resolution:time step ~120 s
100m to 1 km resolution in Bosphor channel:time step ~1 s
Requires a specific programming architecture so that the model can invoke itself on a smaller domain
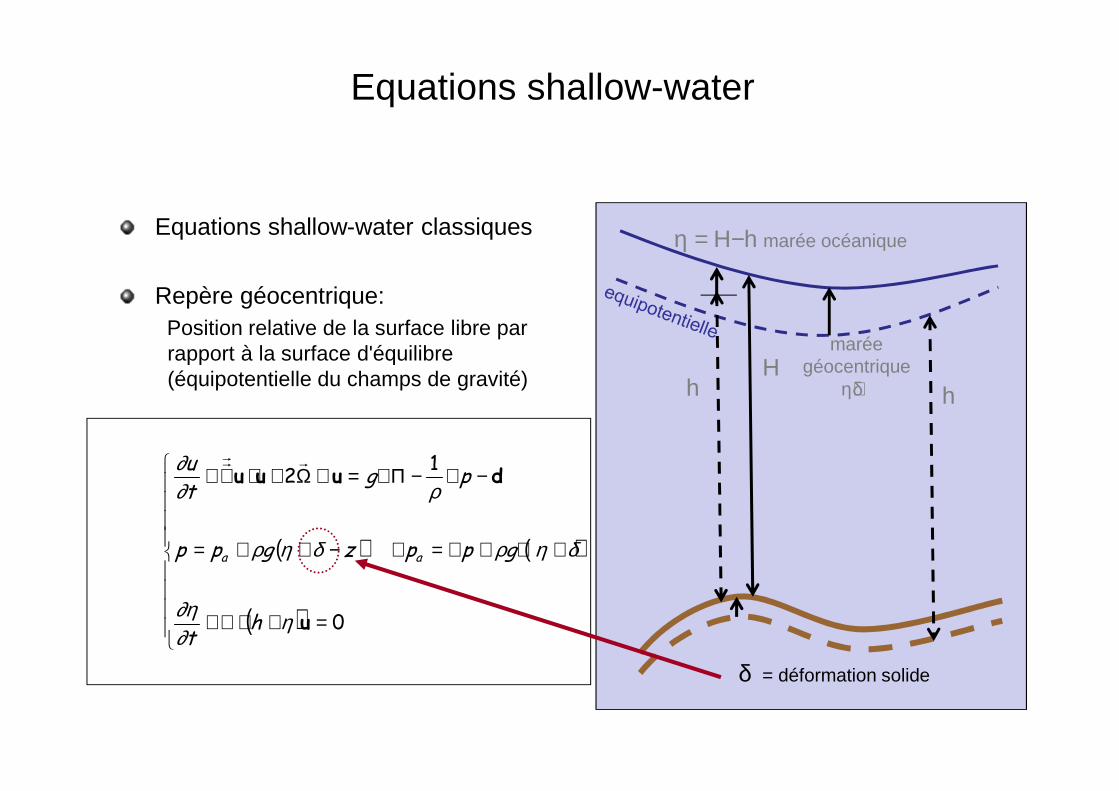
Equations shallow-water
( ) ( )
( )
=+⋅∇+
+∇+∇=∇−++=
−∇−Π∇=∧Ω+⋅∇+
0
12
u
duuu
η∂∂η
δηρδηρ
ρ∂∂
ht
gppzgpp
pgtu
aa
rrr
hH
δ = déformation solide
η = Η−h marée océaniqueEquations shallow-water classiques
Repère géocentrique:Position relative de la surface libre par rapport à la surface d'équilibre (équipotentielle du champs de gravité) h
maréegéocentrique
η+δ

Shallow-Water equation solver
( ) 0,, 22 =⋅∇+∂∂=⋅∇+
∂∂=Φ DD H
tH
t
Htyx uu
η
DFuΩuuu ++∇−=×+∇⋅+∂
∂ ηgt DDD
D222
2 2rr
Computational sequence:
010 =Φ+
∂Φ∂ −τt
Solve continuity equation for elevation
Solve momentum equation for 2D currents
η
D2u
0=Φ
Generalized wave equation (semi-implicit)
Explicit/semi-implicit continuity equation
continuity equation
2D momentum equation
2D barotropic equations:

I.Finite element formulation, continuity equation t ransformation
II.Semi-implicit scheme
Semi-implicit scheme can be performed numerically ( Casulli-Walter)
Semi-implicit continuity equation
434214342143421321
,
∫∫∫
∫∫∫∫∫∫
ΩΓΩ
ΩΩΩΩΩΩ
⋅∇−⋅+∂∂=
⋅∇−⋅∇+∂∂=⋅∇+
∂∂=
⋅∇+∂∂=
⋅∇+∂∂
unu
uuuuu
HHt
HHt
Ht
Ht
Ht
nnn
nnnnnnn
ββηβ
ββηββηββηβη
( ) ( ) 0122
1111
=
−++⋅∇−∆−=⋅∇−
∂∂
∫∫∫∫Ω
−+
Ω
−+
ΩΩ
kkkn
kk
nnn tH
tUUUu θθβηηββηβ
( ) ( ) ∫∫∫∫∫ΩΩ
∇−
ΩΩ
−+
Ω
−+
⋅+∇⋅−∇⋅−−+∇⋅−=∆−⋅ k
nkk
n
gh
kn
kkn
kk
n ghghgt
ψγγγγUU
γ ηηηθηηθ
η444444444 3444444444 21
122
1111
( ) ( )2
111 −+ ++−=′≈
kkkkk ηηθηθηη •Explicit if theta=0
•Fully implicit if theta=1

III. Generalized wave equation :
Semi-implicit scheme can be performed formally or n umerically:
Formal approach introduce consistency difficulties (issue for 3D computation)
( ) DFuΩuuuu
u
HHgHHHt
Ht
tH
++∇−=×+∇⋅+∂∂−
∂∂
∂∂
ηη2
rr
44 344 21
( ) 0102
2
=
⋅∇+∂∂+
∂∂⋅∇+
∂∂ − uu H
tH
tt
ητη
02 102
2
=
⋅∇+∂∂+
++∇−∂∂+×−∇⋅−⋅∇+
∂∂ − uDFuuΩuu H
tHHgH
tHH
t
ητηηη rr
Generalized wave equation
u
ηηηη
NCP1 – P1discretisation
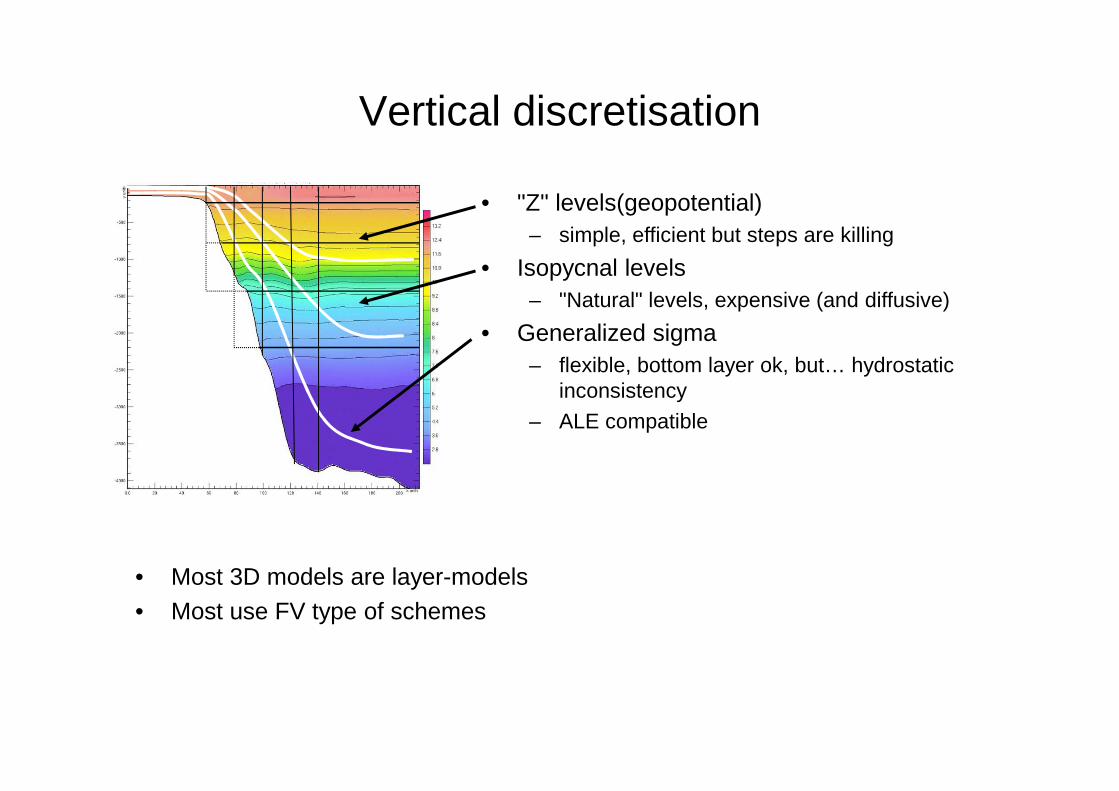
Vertical discretisation
• "Z" levels(geopotential)– simple, efficient but steps are killing
• Isopycnal levels– "Natural" levels, expensive (and diffusive)
• Generalized sigma– flexible, bottom layer ok, but… hydrostatic
inconsistency– ALE compatible
• Most 3D models are layer-models• Most use FV type of schemes
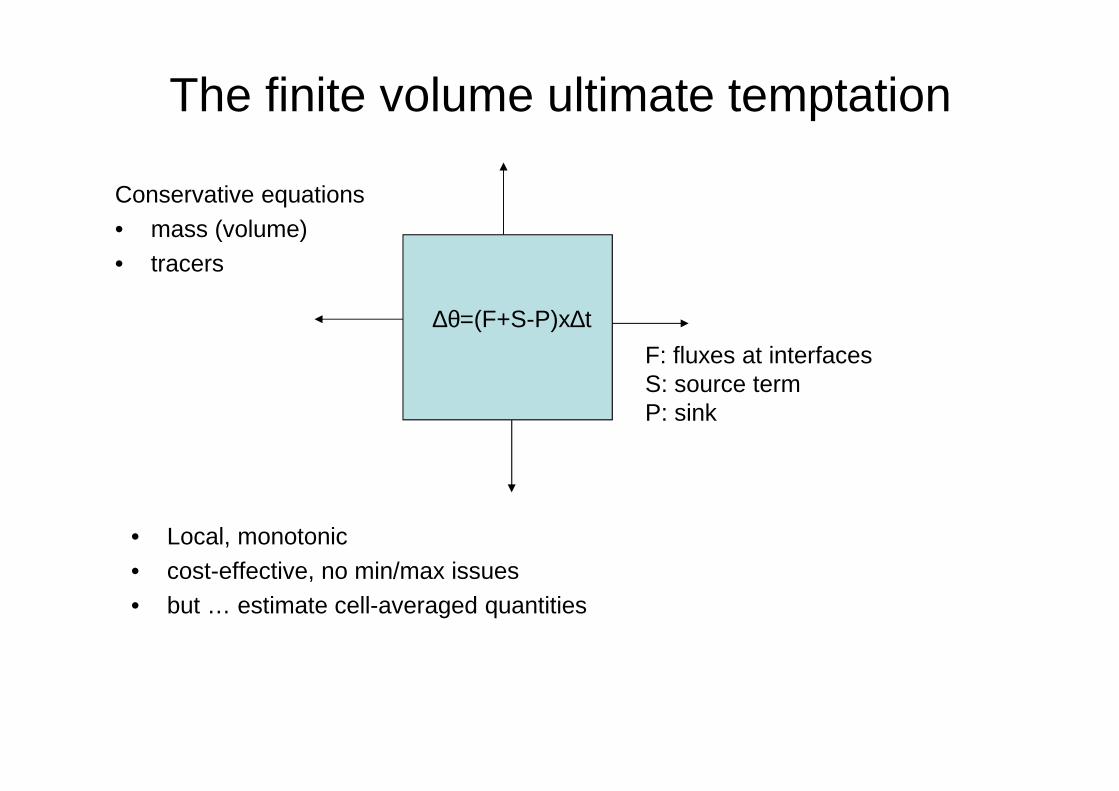
The finite volume ultimate temptation
• Local, monotonic• cost-effective, no min/max issues• but … estimate cell-averaged quantities
∆θ=(F+S-P)x∆t
Conservative equations• mass (volume)• tracers
F: fluxes at interfacesS: source termP: sink

The punition… conservation of mass example
• Cell-averaged quantities further assigend to a mid-cell node ( )• that will support a continuous levels definition = tricky !!!• Inconsistency in the mass distribution
– pressure gradient errors– linked with hydrostatic inconsistency
up
Sn-1
Sn-1
averaged quantities(discontinuous)
p Snp
Sn-1
Sn-1
pSn
transformed into levels(continuous)

Tidal rule of thumb
>>> If you don't put tides in your model,it will be trouble…
>>> If you do put tides, it will be double…
The Clash, Combat Rock ,1981
"should I stay or should I go"
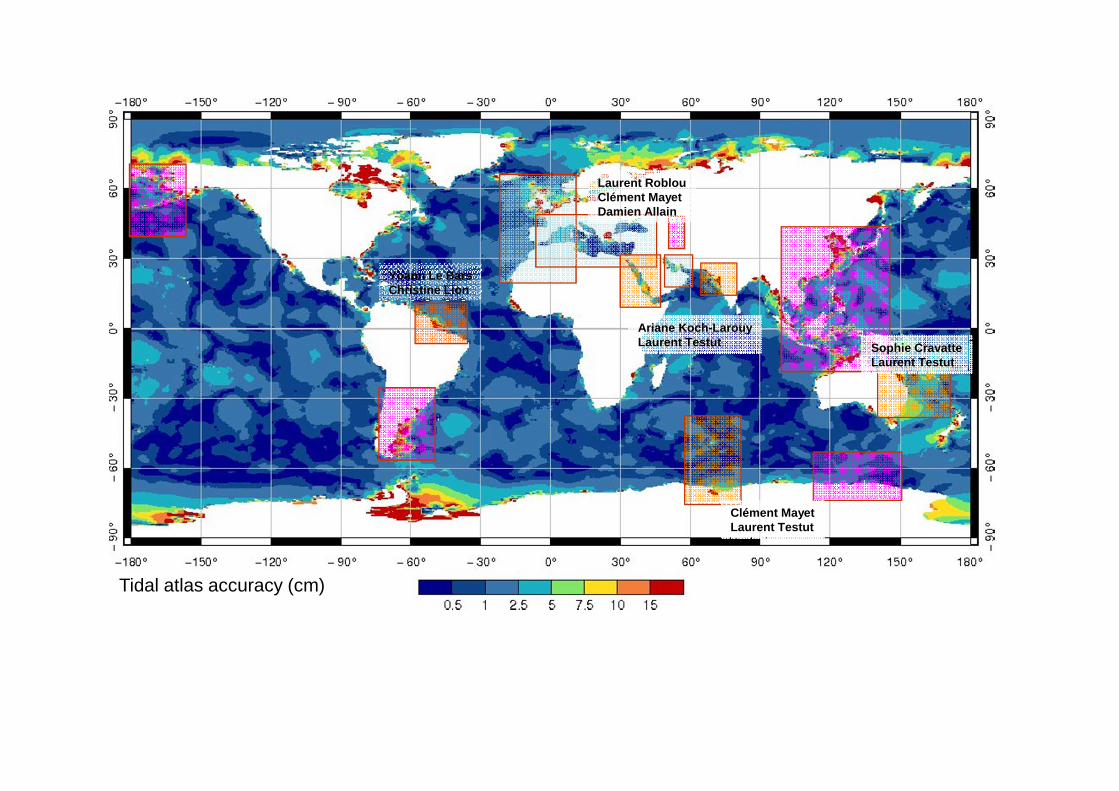
Tidal atlas accuracy (cm)
Ariane Koch-LarouyLaurent Testut
Yoann Le BarsChristine Lion
Sophie CravatteLaurent Testut
Laurent RoblouClément MayetDamien Allain
Clément MayetLaurent Testut

Obidos
North Brazil current and tropical ocean connexion
Continent to Ocean fluxesAmandes Project
(ANR 2006-2009, IRD, INSU, CNES)
hydrodynamic modelling, river and ocean campains, r emote sensing
Le Bars et al., Ocean Modelling, 2010; Lyard et al. , J. Marine Systems, submitted

Tidal modelling for Fukushima system
• Tidal model had to be set up in 2/3 days
• Time-stepping with clamped OBCs (from FES2004) has failed
• Spectral DGP1xLGP2 was run
• Time-stepping with Flather's OBCs succeeded to achieve the tidal simulation and feed Symphonie with precise tidal boundary conditions

FES2012 tidal atlas
Objectif: upgrade de FES2004• 18 years of T/P et Jason +
ERS/Envisat, GFO… • spectral T-UGOm (2010):
– Ensemble data assimilation– CNES support
M2 FES2004 hydrodynamic (prior)
M2 FES2012 hydrodynamicM2 FES2004 (optimal)
Spectral 2D/3D tidal modellingTides is about going forward and backword, so let's go back to spectral
• What is a spectral model?– Wave separation– Quasi-linearised equations– (some) non-linearities solved by iteration– Extremely cost-effective
• What is it usefull for?– Get a quick look– Downscaling of boundary conditions, add currents (enabling Flather OBCs)– Parameters explorations: turbulence, rugosity, bathymetry– Enlighten ensemble computations (allowing for easy 3D assimilation)
• Best option of internal tide surface signature correction in future space ocean topography imager (SWOT, 2020)
• Tides can be used such as testing dynamical process

Continuity:
Momentum:
Wave equation:
Solved implicitely with a complex-valued, sparse matrix solver (variational formulation)
2D spectral equations
( ) Duufu −Π∇++∇−=×+ ggj δαω
( )FMu −∇= αH
+′′−−′−′′′+
∆−=
rirf
rfrigH
ωω
M
′′′++′′−′+
=∆rifr
frri
ωω
det
uMFFMj ⋅∇+=∇⋅∇+ ααωα
αωα FHj =⋅∇+ u

2D versus 3D (kz=10-2 m²/s)
HF-Radar M2 analysis M2 2D-spectral LGP0xLGP1
Mean M2 3D-spectral LGP0xLGP1M2 2D-sequential LGP1xLGP1 M2 3D-spectral LGP0xLGP1, bottom
M2 3D-spectral LGP0xLGP1, surface
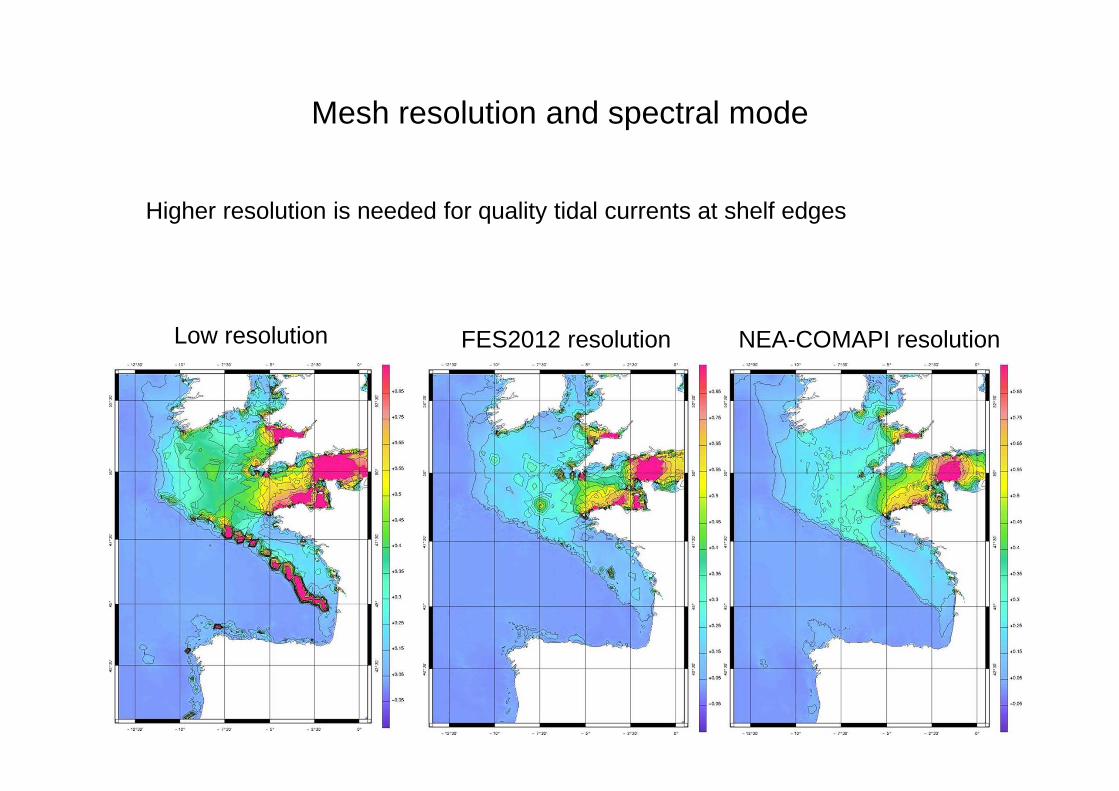
Mesh resolution and spectral mode
Higher resolution is needed for quality tidal currents at shelf edges
Low resolution FES2012 resolution NEA-COMAPI resolution

Bathymetry accuracy issue
NEA-COMAPI (optimal)
Bathymetry Version-2009
NEA (hydrodynamic)
Bathymetry Version-2010
Bathymetry Version-2009 versus XBTs depth
Bathymetry Version-2010 versus XBTs depth
M4
M2
NEA-COMAPI (hydrodynamic)
Bathymetry Version-2009

Mono-chromatic and poly-chromatic
spectral data assimilation
MICSS project (CNES/NASA foundings)P. De Mey, N. Ayoub, L. Roblou

Methodology forregional modeling and data assimilation
• Objectives : provide high accuracy coastal and shelf seas tidal atlas
• Tidal model :– FE model (T-UGOm)– Error estimates: spectral ensemble generation
• Based on empirical hydrodynamics and energetic considerations
• Tidal data :– Tide gauges, altimeter data (X-TRACK data processing*) harmonic constants– Error estimates:
• Harmonic analysis error estimate (white noise assumption or effective surrounding noise)• Along-track variability (smoothness assumption)• Xovers misfits
• Data assimilation (spectral space)– Spectral Ensemble Optimal Interpolation (SpEnOI)– Optimal tidal elevation AND currents
*CTOH, LEGOS, Toulouse

Persian Gulf pilot model
• Geometry:– NOAA shorelines– SHOM bathymetry– O(1) km resolution along the shorelines
• Forcing :– FES2004 OBCs– Astronomic forcing– FES2004 loading/self-attraction
• Dissipation :– Homogeneous bottom rugosity length– Internal wave drag– Smagorinsky horizontal diffusion
Genesis mesh/data editor

Ensemble generation• Bathymetry :
– Collect various bathymetry database– Create/select a "most trusted" bathymetry– Generate perturbed bathymetry:
with
• Open boundary conditions :– Collect various tidal atlases– Create/select a "most trusted" atlas– Generate perturbed OBCs:
with
• Bottom rugosity– Identify significant bottom friction regions– Create a partition (using polygons)– Generate perturbed rugosity by varying
rugosity value in each region
• Internal tide drag– Identify significant internal drag regions– Create a partition (using polygons)– Generate perturbed rugosityby varying
rugosity value in each region
Bathymetry set dispersion(%)
Rugositypartition
∑+=i
ikiok hhh ,α 0, =∑i
kiα
∑+=i
ikiok ηβηη ,~ 0, =∑
ikiβ
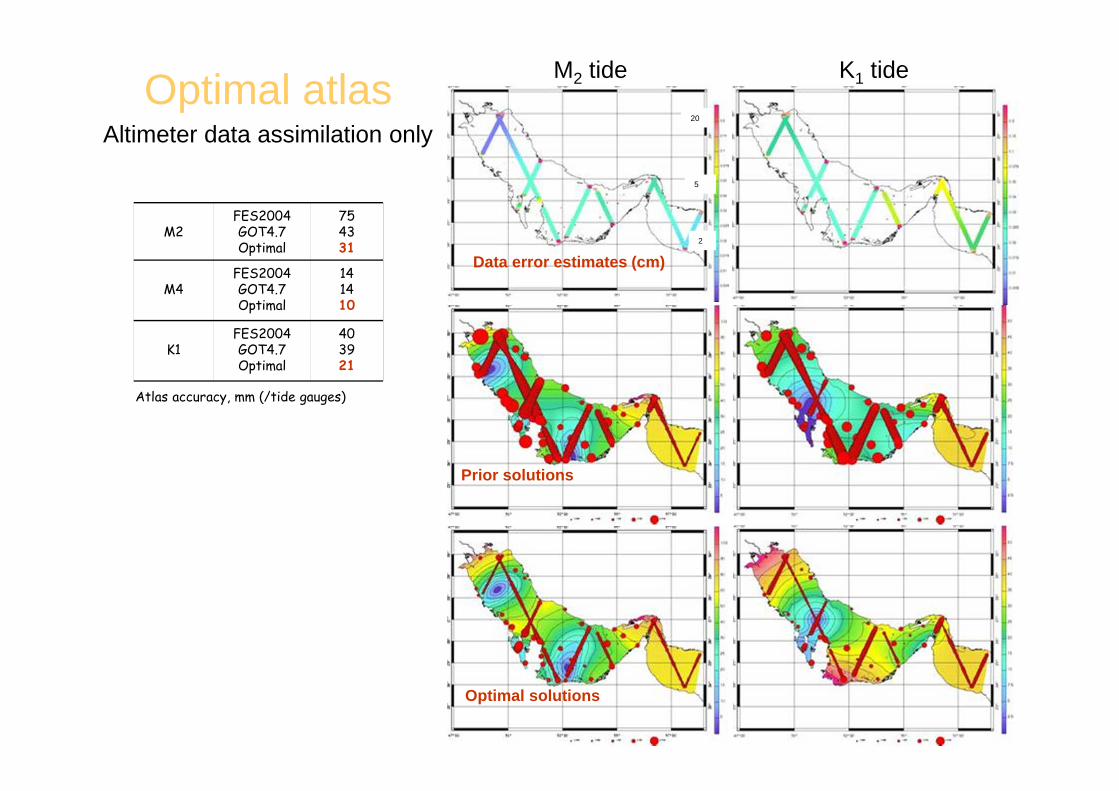
Optimal atlasM2 tide K1 tide
Altimeter data assimilation only20
2
5
M2FES2004GOT4.7Optimal
754331
M4FES2004GOT4.7Optimal
141410
K1FES2004GOT4.7Optimal
403921
Atlas accuracy, mm (/tide gauges)
Prior solutions
Optimal solutions
Data error estimates (cm)

Hydrodynamic OptimalM2
energy budget
Energy fluxes (w/m)
Bottom friction RoW (w/m 2)
4.5 gW4.25 gW
o objective: retrieve hydrodynamic parameters from assimilation solution
o Approach: closure of energy bufget
Diagnostic:
bottom friction to be re-worked
correct energy input (=OBC's accurate enough)
Remedy:
new friction coefficient distribution
Budget

Hydrodynamic OptimalK1
energy budget
2 gW1 gW
Energy fluxes (w/m)
o objective: retrieve hydrodynamic parameters from assimilation solution
o Approach: closure of energy bufget
Diagnostic:
bottom friction distribution incorrect
deficient energy input (=OBC's not accurate enough)
Remedy:
new friction coefficient distribution
improvement of OBCs
Bottom friction RoW (w/m 2)
Budget
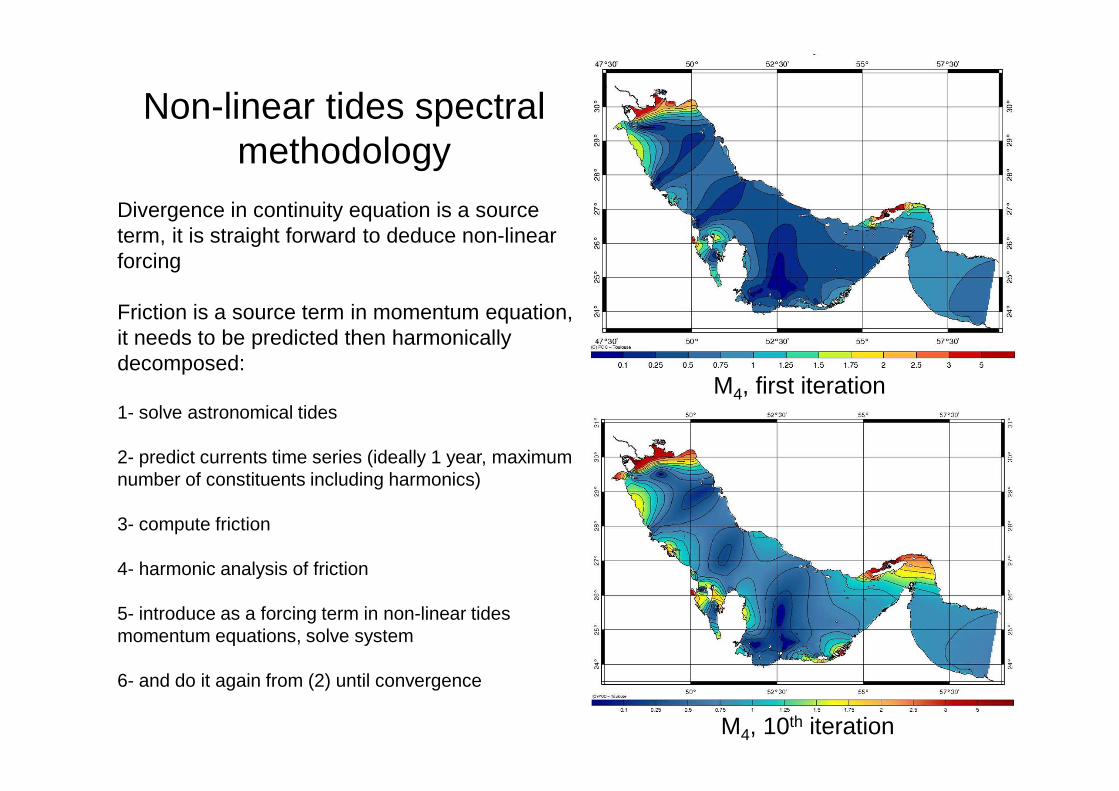
Non-linear tides spectral methodology
Divergence in continuity equation is a source term, it is straight forward to deduce non-linear forcing
Friction is a source term in momentum equation, it needs to be predicted then harmonically decomposed:
1- solve astronomical tides
2- predict currents time series (ideally 1 year, maximum number of constituents including harmonics)
3- compute friction
4- harmonic analysis of friction
5- introduce as a forcing term in non-linear tides momentum equations, solve system
6- and do it again from (2) until convergence
M4, first iteration
M4, 10th iteration

Poly-chromatic data assimilationNon-linear constituents:•O(1) amplitude/noise ratio in altimetry•strongly correlated with generating astronomical tides
Polychromatic data assimilation=
simultaneous data assimilation of several tidal waves to control minor constituents with major constituents
data through their tight correlations
Guess
Control(member that provides
synthetic data)
Optimal
Guess, control and optimal M4 solution obtained from a M2,S2, M4, MS4 polychromatic data assimilation (OSSE exercise); no data given for M4 and MS4. Control and optimal almost identical !!!



![EFECTOS DE LA INMIGRACION SOBRE EL CRECIMIENTO DEL …e P e P P E e P e E d g g d d g g g g d l + + = + + = + + = (1 ) 1 [7] (1)2 t e e p p t t e e d g g d l + − = ∂ ∂ Calculando](https://cdn.vdocuments.mx/doc/165x107/607c8e5c3e266b1acd3d4337/efectos-de-la-inmigracion-sobre-el-crecimiento-del-e-p-e-p-p-e-e-p-e-e-d-g-g-d-d.jpg)



