
S.B. Leble
Równania całkowe w fizyce itechnice.Skrypt dla studentów Wydziału FTiMS PG
4 grudnia 2012
Politechnika GdańskaGdańsk 2006

Spis treści
1 Niektóre równania całkowe w fizyce i technice. . . . . . . . . . . . . 11.1 Wstęp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Równanie struny . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2.1 Statyka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2.2 Dynamika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2.3 Związek z równaniem różniczkowym . . . . . . . . . . . . . . . . . 3
1.3 Fotografia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4 Zdjęcia uszkodzone, „zmaz”. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.5 Uszkodzenie zdjęcia pszez dyfrakcją . . . . . . . . . . . . . . . . . . . . . . . . 51.6 Równanie całkowe dla równania różniczkowego zwyczajnego . . . 6
2 Tomografia komputerowa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.1 Równania całkowe w tomografii . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Teoria Fredholma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.1 Klasyfikacja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2 Równania całkowe z jądrem zdegenerowanym . . . . . . . . . . . . . . . 163.3 Jednorodne równania całkowe o ciągłym jądrze. Widmo
operatora całkowego . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.4 Równania całkowe niejednorodne. Alternatywa Fredholma . . . . 183.5 Równanie całkowe, blizkie do zdegenerowanych . . . . . . . . . . . . . . 21
3.5.1 Rownanie Fredholma II rodzaju o jądrze jednostajnieciagłym (Shmidt) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.6 Równanie całkowe: aproksymacja rożnicami skończonymi . . . . . 233.7 Aproxymacja rożnicami skończonymi, interpretacja
geometryczna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.8 Nierówność Bessela . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.9 Równanie całkowe o jądrach symetrycznych . . . . . . . . . . . . . . . . . 25
3.9.1 Definicja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.9.2 Podstawowy własnosci. Ortogonalność i normalizacja. . . 253.9.3 Widmo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26

VI Spis treści
3.9.4 Widmo operatorów o jądrach iterowanych . . . . . . . . . . . . 273.10 Twierdzenie Hilberta-Shmidta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.11 Rozwiązanie równania niejednorodnego. Szereg Shmidta. . . . . . 313.12 Pełnociągłość operatorów całkowych . . . . . . . . . . . . . . . . . . . . . . . 32
4 Transformacja Laplacea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.1 Transformacja Laplacea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.1.1 Zmienna zespolona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.1.2 Definicja transformacji Laplacea . . . . . . . . . . . . . . . . . . . . . 354.1.3 Wyprowadzenie wzoru na funkcje-originał . . . . . . . . . . . . 364.1.4 Trzy twierdzenia [23] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.1.5 Transformacje Fouriera i Mellina . . . . . . . . . . . . . . . . . . . . 424.1.6 Aplikacje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5 Rozwiązanie Równań całkowych I rodzaju (zagadnieńodwrotnych). Metody regularyzacji. . . . . . . . . . . . . . . . . . . . . . . . 455.1 Zagadnienia odwrotne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.1.1 Metoda Gaussa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6 Algorytm aproksymacji całkowej, metoda regularyzacjiTikhonowa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.1 Metoda Regularyzacji Tichonowa . . . . . . . . . . . . . . . . . . . . . . . . . . 51
6.1.1 Regularyzacja metody Fouriera. . . . . . . . . . . . . . . . . . . . . . 516.1.2 Methoda Moore-Penrose . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.1.3 Pzykład regularyzacji Tikhonova w L2 . . . . . . . . . . . . . . . 526.1.4 Warunki brzegowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 546.1.5 Następny przykład - przestrzeń Soboleva . . . . . . . . . . . . 54
6.2 Przykłady. Równanie dyfuzji. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 566.2.1 Zagadnienie dla równania dyfuzji ź odwrotnym czasem”. 566.2.2 Zagadnienie dla równania dyfuzji: funkcja żródła. . . . . . 566.2.3 Wygenerowanie testowych wartosci temperatury. . . . . . . 576.2.4 Sformu lowanie zagadnienia odwrotnego. . . . . . . . . . . . . . . 586.2.5 Rozwiaιzanie zagadnienia odwrotnego. . . . . . . . . . . . . . . . . 59
Literatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
7 Załącznuk 1. Uwagi matematyczne . . . . . . . . . . . . . . . . . . . . . . . . . 637.1 Uwagi matematyczne. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
7.1.1 Podstawowe pojęcza [4] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 637.1.2 Regularyzacja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 667.1.3 Liniowe zle uwarunkowane zagadnienia. . . . . . . . . . . . . . . 68

1
Niektóre równania całkowe w fizyce i technice.
1.1 Wstęp
Równanie całkowe to takie równananie o funkcji niewiadomej ϕ(x), że po-jawia się całka, w której funkcja podcałkowa zależy od ϕ(x). W równaniutakim mogą też występować inne składniki - niekoniecznie w postaci całki -zależne bezpośrednio od ϕ(x). Jeżeli w równaniu całkowym funkcja niewia-doma występuje liniowo, to takie równanie nazywamy równaniem całkowymliniowym. Przykład:∫ x
a
(x− s)ϕ(s) ds = f(x); f(a) = f ′(a) = 0; => ϕ(x) = f ′′(x). (1.1)
1.2 Równanie struny
1.2.1 Statyka
Rozważamy małę wychylenia:
tg a =h
s, tg b =
h
l − s; tg a ≈ a ≈ sin a, tg b ≈ b ≈ sin b. (1.2)
Rzut warunku równowagiT1 + T2 + P = 0
na oś x:T1 cos a− T2 cos b = 0. (1.3)
Stąd, uwzględniając cos a = 1−a2 + ..., przybliżone wg. (1.2), T1 = T2 = TRzut warunku równowagi
T1 + T2 + P = 0
na oś y:
2 1 Niektóre równania całkowe w fizyce i technice.
T (sin a+ sin b) = p. (1.4)
Przybliżone wg. (1.2)h
s+
h
l − s=p
T
daje
h =p(l − s)s
T l(1.5)
stąd forma trojkąta Fig. 1 (I).
R(x, s) = x(l−s)Tl , 0 < x < s,
(l−x)sT l , s < x < l,
(1.6)
y(x) = pR(x, s).
Zasada superpozycji daje profil nici.∫ l
0p(s)R(x, s)ds = y(x), (1.7)
gdzie p(s) jest gęstość śiły. Mamy równanie Fredholma I rzędu dla niewiadomejp(x) przy podanej funkcji (Fig. 1, II), która się wyzeruje na końcach.
Ćwiczenie. Wyprowadzić wzór na formę struny dla dwóch cząstek punk-towych. Uogólnić na n punktów. (Zasada superpozycji.)
Ćwiczenie. Wprowadzić wzór na gęstość masy w przybliżeniu dyskretnogorozkładu punktów. Formę struny dla dwóch n punktów z uwzględnenijemgęstości masy. Suma Riemanna.
1.2.2 Dynamika
Niech na nić działa zmienna śiła o gęstosci
p(s)Sinωt. (1.8)
Dla małych odchyleń (ruch punktów struny prawie pionowy)
y(x, t) = y(x)Sinωt. (1.9)
Wprowadżmy prawo Newtona o łewej stronie”
ρ(s)∆sd2y(s, t)dt2
= −ρ(s)y(s)ω2Sinωt∆s (1.10)
ρ(s) jest gęstosciu masy na jednostkę długosci. Więc, przenosząc (1.10) dostrony prawej mamy
p(s)− > (p(s)Sinωt+ ρ(s)y(s)ω2Sinωt)

1.3 Fotografia 3
dostajemy wzor na y(x) (1.7) p[o skróceniu Sinωt:
f(x) + ω2∫ l
0p(s)K(x, s)ds = y(x), (1.11)
gdzie f(x) =∫ l
0 p(s)R(x, s)ds,K(x, s) = G(x, s)ρ(s).Mamy równanie Fredholma II rzędu dla niewiadomej y(x), K(x, s) - jadro,
λ = ω2.Możemy teraz sformulować problem dla y(x).Ćwiczenie. Podać wzór na równanie Newtona dla cząstki punktowej, za-
wieszonej na nici.
1.2.3 Związek z równaniem różniczkowym
Niech gęstość ρ(x) = ρ jest stałą. Rozniczkujemy (refr2) uwzgledniajac (1.6).Dostajemy równanie różniczkowe zwyczajne dla y(x);
y′′(x) = −ω2 ρ
Ty(x) + f ′′(x). (1.12)
Stw. Każde rozwiązanie (1.12) które się wyzeruje na końcach x = 0, l jestteż rozwiązaniem równania całkowego Fredholma (3.94).
Dowód: Mnożymu równanie (1.12) przez −TG(x, s) i całkijemy po s.Mamy równanie (3.94) bo całka (prez części)∫ l
0TG(x, s)f ′′(s)ds = f(x).
Ćwiczenie. Sprawdzić że
y(x) = C1 sin(kx)+C2 cos(kx)+1k
∫ ∞0
f ′′(s) sin[k(x−s)]ds, ρT
= c2, k = ωc.
jest rozwiązaniem (ogólnym) (refdif).Ćwiczenie. Podstawic do warunków brzegowych y(0) = y(l) = 0. Upewnic
sie że warunek sin kl 6= 0 jest warunkiem koniecznym dla istnienia rozwiazaniaprzy dowolnej ciagłej f(x).
1.3 Fotografia
W optyce geometrycznej można zaniedbać zjawiska dyfrakcji i interferencji.Zapominamy, że światło jest falą o długosci λ pod warunkiem że λ d, gdzied – rozmiar obiektu (szczegółu).
1f1
+1f2
=1f, f1 f,
4 1 Niektóre równania całkowe w fizyce i technice.
w,w′ – intensywności,w(ξ, η) – reprezentuje obrazek (zdjęcie) na odległosci f1,w′(ξ′, η′) – rzeczywistość na odległosci f2; f -odległość ogniskowa.
w(ξ, η) = w′(ξ′, η′), (1.13)
ξ′
f1=−ξf2,
η′
f1=−ηf2. (1.14)
Zagadnienie proste:w(ξ, η) = w′(ξ′, η′),
gdzie:
ξ =−ξ′
q, η =
−η′
q,
q =f1
f2, f2 = (
1f− 1f1
)−1, f1 f.
1.4 Zdjęcia uszkodzone, „zmaz”.
Niech w trakcie wykonywania zdjęcia aparat lub ciało znajdują się w ruchu, zprędkością v, kierunek ruchu pokrywa się z osią ξ, v ‖ ξ, układ współrzędnych(x, y) pokrywa się w chwili początkowej z (ξ, η).
∆ = vτ,
gdzie: ∆ – przesunięcie, τ – czas wykonywania zdjęcia.Do punktu x, y trafi intensywność od całego odcinka:
w(x, y) =1∆
∫ x+∆
x
w′(ξ, y) dξ. (1.15)
Wprowadzamy funkcję:
K(x, ξ) =
1∆ dla ξ ∈ [x, x+∆]0 dla ξ /∈ [x, x+∆]
(1.16)
w′(x, y) = ϕ(x), w(x, y) = f(x).
Odrzymujemy równanie Fredholma I rzędu:
f(x) =∫ ∞−∞
K(x, ξ)ϕ(ξ)dξ. (1.17)
∆ – na tym odcinku energia dochodzi w czasie τ . Intensywność – liczba reakcjichemicznych w pewnym punkcie; gdy ciało się porusza następuje rozmazanie.

1.5 Uszkodzenie zdjęcia pszez dyfrakcją 5
Metoda transformacji Fouriera – funkcję reprezentuje się całką Fouriera lubszeregiem Fouriera; na całej osi jest widmo ciągłe:
ϕ(x) =1√2π
∫ ∞−∞
eiωx ϕ(ω) dω,
f(x) =1√2π
∫ ∞−∞
eiωxf(ω) dω, f(ω) =1√2π
∫ ∞−∞
e−iωxf(x)dx ,
1√2π
∫ ∞−∞
K(x, ξ)∫ ∞−∞
eiωξϕ(ω) dω dξ = f(x), (1.18)∫ ∞−∞
1iω∆
[eiω(x+∆) − eiwx ]ϕ(ω); dω =∫ ∞−∞
eiωxf(ω) dω,
1π
∫ ∞−∞
1iω∆
(eiω∆ − 1)eiωxϕ(ω) dω =∫ ∞−∞
eiωxf(ω) dω,
f(ω) =1
iπω∆(eiω∆ − 1)ϕ(ω); (1.19)
eiωx – bardzo szybko oscylują;
ϕ(x) =1π
∫ ∞−∞
eiωxϕ(ω)dω =1π
∫ ∞−∞
eiωxiπω∆f(ω)(eiω∆ − 1)
dω. (1.20)
Komentarz. Kierunek zmazania można określić po sladam na zdieczu.Reprodukcja ilustracji z [18]. a)Rozmaz b)Wyniki odtwarzania przes roz-
wiązywanie równania (1.17) metoda Fouriera. c) Metoda Tikhonova.
1.5 Uszkodzenie zdjęcia pszez dyfrakcją
Promień krążka dyfrakcyjnego:
ρ = aδf2
δ– odległość między dwiema płaszczyznami
x = − f2−δf1ξ′
y = − f2+δf2η′
Z powodu krążka informacja jest rozmyta i informacja z danego punktu mieszsię z informacją z punktów sąsiednich.Warunek „trafienia” informacji z otoczenia:√
(x− ξ)2 + (y − η)2 ¬ ρ
g(x, y)– intensywność w punkcie (x, y)
g(x, y) =∫ ∫
Ωω(ξ,η)πρ2 dξdη

6 1 Niektóre równania całkowe w fizyce i technice.
Ω =√
(x− ξ)2 + (y − η)2 ¬ ρ
g(x, y) = 1πρ2
∫ ∫∞−∞K(x− ξ, y − η)ω(ξ, η)dξdη
K(x− ξ, y − η) = 1 gdy√
(x− ξ)2 + (y − η)2 ¬ ρK(x− ξ, y − η) = 0 gdy
√(x− ξ)2 + (y − η)2 > ρ
Uwaga:δ,∆ =?
Są to parametry.
1.6 Równanie całkowe dla równania różniczkowegozwyczajnego
Okazuje się, że równanie różniczkowe liniowe zwyczajne
dny(x)dxn
+ a1(x)dn−1y(x)
dxn−1 + . . .+ an(x)y(x) = f(x), (1.21)
o ciągłych współczynnikach ai(x), (i = 1, 2, . . . , n), przy warunkach począt-kowych
y(0) = C0, y′(0) = C1, . . . , y
(n−1)(0) = Cn−1, (1.22)
można sprowadzić do zagadnienia rozwiązania równania całkowego Volterrydrugiego rodzaju. Aby to pokazać rozważmy przykład równania różniczkowegodrugiego rzędu
d2y(x)dx2 + a1(x)
dy(x)dx
+ a2(x)y(x) = f(x), (1.23)
z warunkami początkowymi
y(0) = C0, y′(0) = C1. (1.24)
Przyjmijmyd2y(x)
dx2 = ϕ(x). (1.25)
Całkując kolejno powyższe wyrażenie i uwzględniając warunki początkowe(1.24), otrzymujemy
dy(x)dx
=∫ x
0ϕ(s) ds+ C1, (1.26)
y(x) =∫ p
0
∫ x
0ϕ(s) dsdp+ C1x+ C0. (1.27)
1.6 Równanie całkowe dla równania różniczkowego zwyczajnego 7
Korzystając następnie ze wzoru∫ x
a
dp∫ p
a
ϕ(s) ds =∫ x
a
(x− t)ϕ(t) dt, (1.28)
możemy napisać
y(x) =∫ x
0(x− t)ϕ(t) dt+ C1x+ C0. (1.29)
Podstawiając teraz (1.25), (1.26) oraz (1.29) do równania (1.23), otrzymujemy
ϕ(x)+a1(x)∫ x
0ϕ(t) dt+a2(x)
∫ x
0(x−t)ϕ(t) dt+a1(x)C1+a2(x)(C1x+C0) = f(x),
(1.30)co po wprowadzeniu oznaczeń
K(x, t) = −[a1(x) + a2(x)(x− t)
], (1.31)
F (x) = f(x)− a1(x)C1 − a2(x)(C1x+ C0), (1.32)
przyjmuje postać równania całkowego Volterry drugiego rodzaju:
ϕ(x) =∫ x
0K(x, t)ϕ(t) dt+ F (x). (1.33)

Rysunek 1.1. Profil struny

Rysunek 1.2. Odtwarzanie obrazu.
Rysunek 1.3. Przesuniecie w funkcji czasu.
Rysunek 1.4. Obrazki z [18].

2
Tomografia komputerowa
2.1 Równania całkowe w tomografii
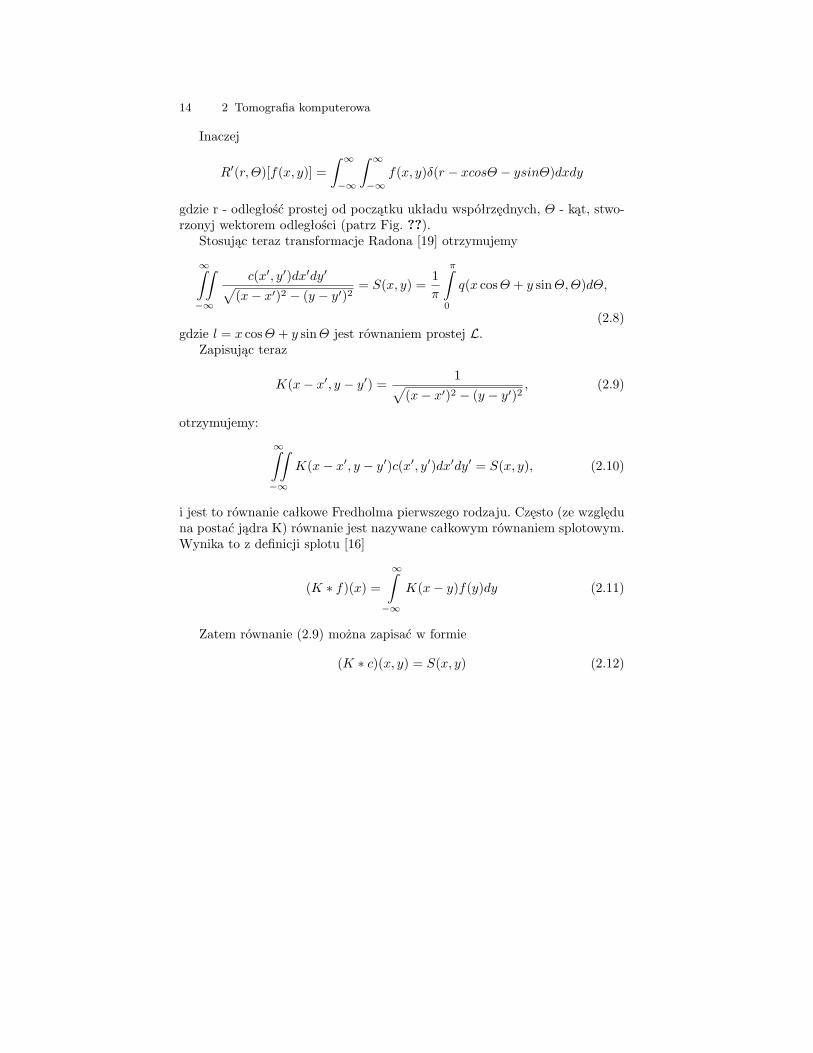
Problem związany z tomografią dotyczy obrazowania rozkładu gęstości ba-danego obiektu. Dla uproszczenia zagadnienia zajmiemy się tu problememdwuwymiarowym (w płaszczyźnie XY), szerszy opis zagadnień oraz używa-nych urządzeń znajduje się w [17, 18]. Uzyskanie poszerzenia na trzy wymiaryjest bardzo proste gdyż wystarczy przesuwać otrzymany wynik (metodę) dlapłaszczyzny wzdłuż osi Z (w układzie Kartezjańskim XYZ).
Rozpatrzmy zatem układ osi XY z umieszczonym w środku obiektem (2.2).Detektory i elementy emitujące promieniowanie X (nie musi to być koniecz-nie promieniowanie X, jednak jest ono najczęściej używane) przesuwają sięwzdłuż osi l i okrążają obiekt, kąt Θ zmienia się od 0 do π (często stosowanyjest obieg detektorów dookoła obiektu sprowadza się to jednak do dokona-nia dwóch takich samych pomiarów - dzięki temu można poprawić jakośćpomiaru). Prezentowany tutaj sposób tomografii jest typem absorpcyjnym,bowiem wiązka promieniowania przechodząca przez obiekt ulega osłabieniu,które jest spowodowane absorpcją (oczywiście osłabienie to może być spowo-dowane takimi procesami jak odbicie czy dyfrakcja promieniowania, jednakdla uproszczenia nie będą one tutaj uwzględniane).
Dla naszych celów wystarczy prawo Lamberta
I(l, Θ) = I0(l, Θ)e−∫
L(l,Θ)
c(x,y)ds
, (2.1)
co oznacza, że wiązka o natężeniu I0 przechodząc przez próbkę ulega osłabieniudo I. Całka ∫
L(l,Θ)
c(x, y)ds, (2.2)
określa współczynnik absorbcji i jest liczona wzdłuż wiązki promieniowania(na rysunku L) na odcinku pomiędzy detektorem a generatorem. Należy za-

12 2 Tomografia komputerowa
Rysunek 2.1. Schemat procesu skanowania (wzdłuż osi l zachodzi skanowanie,układ obraca się wokół środka układu współrzędnych)
uważyć, że gęstość obiektu będziemy chcieli uzyskać we współrzędnych Ka-retzjańskich.
W najprostszym przypadku jednolitego materiału o grubości d(l, Θ) wdanym położeniu generatora i detektora, całka (2.2) sprowadza się do∫
L(l,Θ)
c(x, y)ds = µd(l, Θ), (2.3)
gdzieµ - współczynnik absorpcyjny obiektu. (należy zwrócić uwagę na to, że
współczynnik absorpcji jest związany najczęściej z gęstością ciała).Dla uproszczenia (podobnie uproszczenie stosuje się w praktyce) zakłada
się, że generator promieniuje wiązkę o stałym natężeniu I0(l, Θ) = const..Można zatem zapisać
q(l, θ) =∫
L(l,Θ)
c(x, y)ds = − lnI(l, Θ)I0
(2.4)
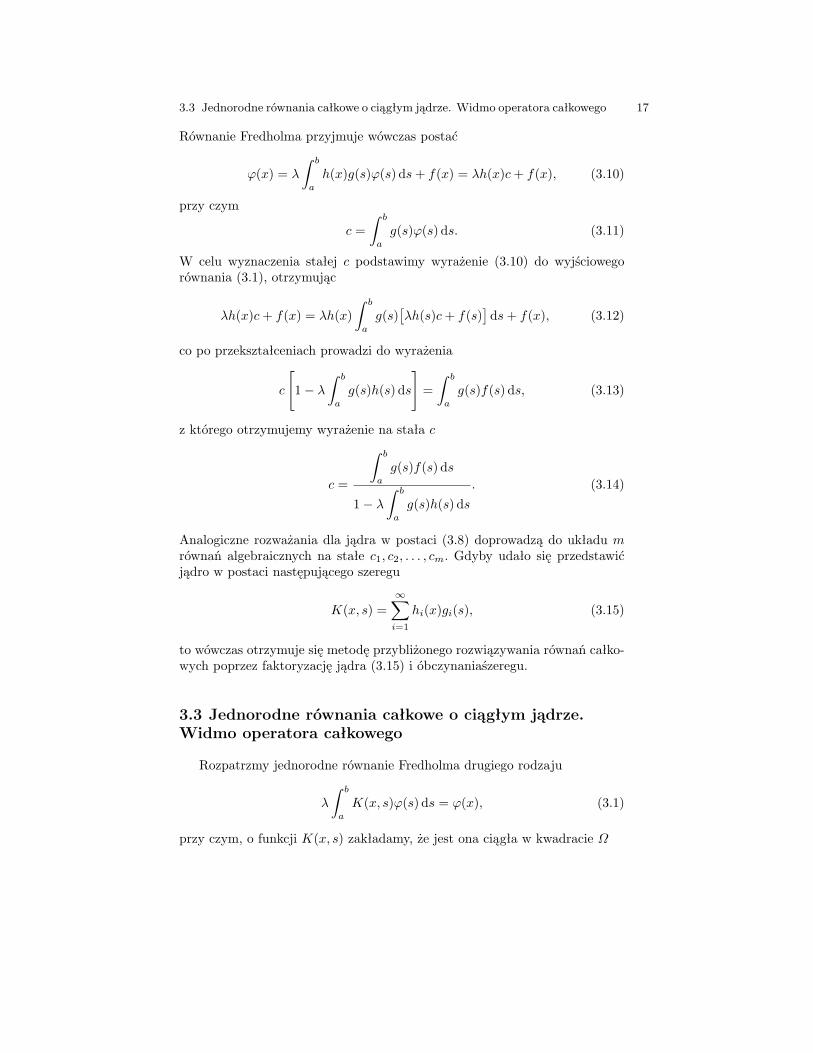
Transformacja Radona - transformacja całkowa, która definiuje się jako
R(p, τ)[f(x, y)] =∫∞−∞ f(x, τ + px)dx =∫∞
−∞∫∞−∞ f(x, y)δ[y − (τ + px)]dydx = U(p, τ)
(2.5)

2.1 Równania całkowe w tomografii 13
Rysunek 2.2. Schemat pobierania informacji wzdłuż cięciwy
gdzie p - nachylenie prostej i τ - jej krzyżowanie. Delta-fukcja Diraca, formale∫ ∞−∞
δ[x− s]φ[s]ds = φ(x),
gdzie [rawa strona nie hest całką a tylko oznaczeniem fukcjonała (dystybucji).Odwrotna transformacja Radona
f(x, y) =1
2π
∫ ∞−∞
∂
∂yH[U(p, y − px)]dp, (2.6)
gdzie H transformacja Hilberta:
g(y) = H[f(x)] = 1πv.p.
∫∞−∞
f(x)dxx−y
f(x) = H−1[g(y)] = − 1πv.p.
∫∞−∞
g(y)dyy−x ,
(2.7)
H−1 - transformacja odwrotna. Oznaczenie v.p., ”valeur principalĆauchy’egodefinuje się jako całka niewłaściwa, mianowicze
v.p.
∫ ∞−∞
f(x)dxx− y
= limε→0[∫ y−ε
−∞
f(x)dxx− y
+∫ y+ε
−∞
f(x)dxx− y
].
14 2 Tomografia komputerowa
Inaczej
R′(r,Θ)[f(x, y)] =∫ ∞−∞
∫ ∞−∞
f(x, y)δ(r − xcosΘ − ysinΘ)dxdy
gdzie r - odległość prostej od początku układu współrzędnych, Θ - kąt, stwo-rzonyj wektorem odległości (patrz Fig. ??).
Stosując teraz transformacje Radona [19] otrzymujemy
∞∫∫−∞
c(x′, y′)dx′dy′√(x− x′)2 − (y − y′)2
= S(x, y) =1π
π∫0
q(x cosΘ + y sinΘ,Θ)dΘ,
(2.8)gdzie l = x cosΘ + y sinΘ jest równaniem prostej L.
Zapisując teraz
K(x− x′, y − y′) =1√
(x− x′)2 − (y − y′)2, (2.9)
otrzymujemy:
∞∫∫−∞
K(x− x′, y − y′)c(x′, y′)dx′dy′ = S(x, y), (2.10)
i jest to równanie całkowe Fredholma pierwszego rodzaju. Często (ze względuna postać jądra K) równanie jest nazywane całkowym równaniem splotowym.Wynika to z definicji splotu [16]
(K ∗ f)(x) =
∞∫−∞
K(x− y)f(y)dy (2.11)
Zatem równanie (2.9) można zapisać w formie
(K ∗ c)(x, y) = S(x, y) (2.12)

3
Teoria Fredholma
3.1 Klasyfikacja
Rozpatrywać będziemy tylko równania całkowe jednej zmiennej. O funk-cjach ϕ(x), f(x) zakładać będziemy, że są one określone i ciągłe na odcinku[a, b], x ∈ [a, b], natomiast o funkcji K(x, s) zakładamy, że jest ona określonai ciągła w kwadracie [a, b] × [a, b], x ∈ [a, b], s ∈ [a, b]. Funkcje f(x) orazK(x, s) są funkcjami danymi i nazywane są odpowiednio funkcją zakłócającąoraz jądrem równania całkowego.
Równania całkowe, w których obie granice całkowania są stałe, nazywa sięrównaniami całkowymi Fredholma, jeżeli natomiast tylko jedna z granic całko-wania jest stałą, mówimy o równaniu całkowym Volterry. Równania całkowemożna dodatkowo sklasyfikować według następującego kryterium: jeżeli funk-cja niewiadoma występuje jedynie pod znakiem całki to mówimy o równaniucałkowym pierwszego rodzaju, jeżeli natomiast funkcja niewiadoma występujenie tylko pod znakiem całki, ale jeszcze w jakiś inny sposób, to równanie takienazywamy równaniem całkowym drugiego rodzaju. Poniżej przedstawiona jesttaka właśnie klasyfikacja:
równanie całkowe Fredholma pierwszego rodzaju
λ
∫ b
a
K(x, s)ϕ(s) ds+ f(x) = 0, (3.1)
równanie całkowe Fredholma drugiego rodzaju
λ
∫ b
a
K(x, s)ϕ(s) ds+ f(x) = ϕ(x), (3.2)
równanie całkowe Volterry pierwszego rodzaju
λ
∫ x
a
K(x, s)ϕ(s) ds+ f(x) = 0, (3.3)

16 3 Teoria Fredholma
równanie całkowe Volterry drugiego rodzaju
λ
∫ x
a
K(x, s)ϕ(s) ds+ f(x) = ϕ(x), (3.4)
przy czym λ jest pewnym parametrem, w ogólności zespolonym. W przypadkugdy f(x) 6= 0 mówimy o równaniu całkowym niejednorodnym, natomiast gdyf(x) = 0, o równaniu jednorodnym.
Korzystając z klasyfikacji wprowadzonej przez Hadamarda okazuje się, żerównania pierwszego rodzaju Fredholma oraz Volterry, (3.1) i (3.3), są częstozagadnieniami źle uwarunkowanymi (ill posed), natomiast równania drugiegorodzaju Fredholma i Volterry, (3.2) i (3.4), są już zagadnieniami dobrze uwa-runkowanymi.
Operator całkowy
Równania całkowe można również zapisać, korzystając z operatora całkowego,którego jądrem jest funkcja K(x, s). Dla przykładu, równanie, które definiujetaki operator dla równań typu Fredholma, ma postać
Kϕ(x) =∫ b
a
K(x, s)ϕ(s) ds. (3.5)
W konsekwencji równanie Fredholma pierwszego rodzaju przyjmie postać
Kϕ(x) = − 1λf(x), (3.6)
natomiast równanie Fredholma drugiego rodzaju zapiszemy jako(1− λK
)ϕ(x) = f(x). (3.7)
3.2 Równania całkowe z jądrem zdegenerowanym
Rozpatrzmy równanie całkowe Fredholma drugiego rodzaju (3.1). JądroK(x, s) takiego równania nazywa się zdegenerowanym, jeśli jest ono sumąskończonej ilości iloczynów funkcji zależnych tylko od x przez funkcje zależnetylko od s, a więc jest funkcją postaci
K(x, s) =m∑i=1
hi(x)gi(s). (3.8)
Rozważmy teraz najprostszy przypadek jądra zdegenerowanego
K(x, s) = h(x)g(s). (3.9)
3.3 Jednorodne równania całkowe o ciągłym jądrze. Widmo operatora całkowego 17
Równanie Fredholma przyjmuje wówczas postać
ϕ(x) = λ
∫ b
a
h(x)g(s)ϕ(s) ds+ f(x) = λh(x)c+ f(x), (3.10)
przy czym
c =∫ b
a
g(s)ϕ(s) ds. (3.11)
W celu wyznaczenia stałej c podstawimy wyrażenie (3.10) do wyjściowegorównania (3.1), otrzymując
λh(x)c+ f(x) = λh(x)∫ b
a
g(s)[λh(s)c+ f(s)
]ds+ f(x), (3.12)
co po przekształceniach prowadzi do wyrażenia
c
[1− λ
∫ b
a
g(s)h(s) ds
]=∫ b
a
g(s)f(s) ds, (3.13)
z którego otrzymujemy wyrażenie na stała c
c =
∫ b
a
g(s)f(s) ds
1− λ∫ b
a
g(s)h(s) ds
. (3.14)
Analogiczne rozważania dla jądra w postaci (3.8) doprowadzą do układu mrównań algebraicznych na stałe c1, c2, . . . , cm. Gdyby udało się przedstawićjądro w postaci następującego szeregu
K(x, s) =∞∑i=1
hi(x)gi(s), (3.15)
to wówczas otrzymuje się metodę przybliżonego rozwiązywania równań całko-wych poprzez faktoryzację jądra (3.15) i óbczynaniaśzeregu.
3.3 Jednorodne równania całkowe o ciągłym jądrze.Widmo operatora całkowego
Rozpatrzmy jednorodne równanie Fredholma drugiego rodzaju
λ
∫ b
a
K(x, s)ϕ(s) ds = ϕ(x), (3.1)
przy czym, o funkcji K(x, s) zakładamy, że jest ona ciągła w kwadracie Ω

18 3 Teoria Fredholma
Ω =
(x, s) ∈ R2 : a ¬ x ¬ b, a ¬ s ¬ b. (3.2)
Powyższe równanie w postaci operatorowej przyjmuje postać
Kϕ(x) =1λϕ(x). (3.3)
Zauważmy, że na powyższe równanie można patrzeć jak na zagadnienie spek-tralne, tzn. zagadnienie na wartości własne, dla operatora całkowego K. Wtym miejscu nasuwa się pytanie: co można powiedzieć o wartościach własnychoperatora całkowego K w równaniu (3.3)? Odpowiedź na to pytanie daje na-stępujące twierdzenie:Twierdzenie Widmo operatora całkowego K, o ciągłym jądrze K(x, s), okre-ślonym w kwadracie Ω, jest dyskretne.Uwaga.Operator całkowy o jądrze zdegenerowanym ma widmo skończone.
3.4 Równania całkowe niejednorodne. AlternatywaFredholma
Rozważmy niejednorodne równanie Fredholma drugiego rodzaju
λ
∫ b
a
K(x, s)ϕ(s) ds+ f(x) = ϕ(x). (3.1)
O funkcjach K(x, s) oraz f(x) ponownie zakładamy, że są one określone iciągłe odpowiednio, w kwadracie Ω oraz na odcinku [a, b].
Równanie (3.1) rozwiążemy metodą iteracyjną (jest to metoda przybliżo-nego znajdywania rozwiązań podobna do metody kolejnych przybliżeń Picardadla równań różniczkowych zwyczajnych). Jako zerowe przybliżenie szukanegorozwiązania ϕ(x) przyjmiemy
ϕ0(x) ≡ 0. (3.2)
Podstawiając to przybliżenie do lewej strony równania całkowego (3.1), otrzy-mujemy pierwsze przybliżenie
ϕ1(x) = f(x). (3.3)
Drugie przybliżenie otrzymamy, podstawiając (3.3) do (3.1)
ϕ2(x) = f(x) + λ
∫ b
a
K(x, s)f(s) ds, (3.4)
z kolei trzecie przybliżenie otrzymuje się podstawiając (3.4) do (3.1)
ϕ3(x) = f(x) + λ
∫ b
a
K(x, s)
[f(s) + λ
∫ b
a
K(s, ξ)f(ξ) dξ
]ds, (3.5)

3.4 Równania całkowe niejednorodne. Alternatywa Fredholma 19
co można przepisać w postaci
ϕ3(x) = f(x) + λ
∫ b
a
K(x, s)f(s) ds+ λ2∫ b
a
∫ b
a
K(x, s)K(s, ξ)f(ξ) dξ ds.
(3.6)Proces taki można kontynuować, otrzymując kolejne przybliżenia dla szuka-nej funkcji ϕ(x). Zapis operatorowy umożliwia podanie w czytelny sposóbwyrażenia na n-te przybliżenie, czyli n-tego kroku iteracyjnego:
ϕn(x) =(I + λK + λ2K2 + . . .+ λnKn
)f(x), (3.7)
przy czym I jest operatorem tożsamościowym, tzn.
If(x) = f(x). (3.8)
Przechodząc do granicy przy n → ∞ otrzymujemy tzw. szereg Neumanna(czasami: Liouville–Neumann series):
ϕ(x) = limn→∞
ϕn(x) =∞∑n=0
λnKnf(x). (3.9)
Okazuje się, że szereg (3.9) jest zbieżny.Operator
ˆR(λ)∞∑n=0
λnKn (3.10)
jest fukcją zmiennej zespolonej λ, nazywamy rezolventą (resolvent).Podamy szkic dowodu zbieżności tego szeregu. Jak wiadomo, szereg jest
zbieżny gdy ciąg jego sum częściowych jest zbieżny do granicy właściwej.Oznacza to, że należy pokazać, iż∣∣∣∣ϕ(x)− ϕn(x)
∣∣∣∣n→∞−−−→0, (3.11)
przy czym norma zdefiniowana jest następująco∣∣∣∣ψ(x)∣∣∣∣ = max
x∈[a,b]
∣∣ψ(x)∣∣. (3.12)
Zbieżność szeregu pokazuje się również za pomocą odpowiednich kryteriów.Skorzystamy z kryterium porównawczego, które mówi, że jeżeli dwa szeregi,(a) i (b), o wyrazach dodatnich, począwszy od pewnego n, spełniają warunek
an ¬ bn, (3.13)
to ze zbieżności szeregu (b) wynika, że szereg (a) jest zbieżny.Wiadomo, że funkcja ciągła na odcinku jest funkcją ograniczoną. Oznacza
to, iż
20 3 Teoria Fredholma∣∣K(x, s)∣∣ ¬M, dla (x, s) ∈ Ω (3.14)
oraz ∣∣f(x)∣∣ ¬ F, dla x ∈ [a, b], (3.15)
przy czym liczby M i F są kresami górnymi, odpowiednio jądra K(x, s) orazfunkcji f(x). W oparciu o wyrażenia (3.14) i (3.15), możemy napisać nastę-pujący ciąg nierówności:∣∣∣∣∣λ
∫ b
a
K(x, s)f(s) ds
∣∣∣∣∣ ¬ |λ|MF (b− a), (3.16)
∣∣∣∣∣λ2∫ b
a
∫ b
a
K(x, s)K(s, ξ)f(ξ) dξ ds
∣∣∣∣∣ ¬ |λ|2M2F (b− a)2, (3.17)
dla n-tego wyrazu, w notacji operatorowej, mamy∣∣∣λnKnf(x)∣∣∣ ¬ |λ|nMn(b− a)nF. (3.18)
W ostatniej nierówności, po prawej stronie występuje wyraz szeregu geome-trycznego, który jest zbieżny, gdy jego iloraz q spełnia warunek: |q| < 1.Oznacza to, że musi zachodzić∣∣|λ|M(b− a)
∣∣ < 1. (3.19)
Na mocy kryterium porównawczego, szereg Neumanna (3.9) jest zbieżny, przyzałożeniu, że
|λ| < 1M(b− a)
. (3.20)
Analogiczne rozważania przeprowadzone dla równania Volterry prowadządo następujących oszacowań:∣∣∣∣λ ∫ x
a
K(x, s)f(s) ds∣∣∣∣ ¬ |λ|MF (x− a), (3.21)
∣∣∣∣λ2∫ x
a
∫ x
a
K(x, s)K(s, ξ)f(ξ) dξ ds∣∣∣∣ ¬ |λ|2M2F
(x− a)2
2(3.22)
i dla n-tego wyrazu w notacji operatorowej∣∣∣λnKnf(x)∣∣∣ ¬ |λ|nMn (x− a)n
n!F. (3.23)
Szereg otrzymany po prawej stronie nierówności (3.23) jest zbieżny dla każ-dego x.
Jednoznaczność rozwiązaniaTwierdzenie. Rozwiązanie równania Fredholma jest jednoznacznym

3.5 Równanie całkowe, blizkie do zdegenerowanych 21
Dowód. Niech φ1, φ2 są różne rozwiązania (3.1). Stworzymy roznice φ1−φ2 max mod oznaczimy ε, supx|φ1−φ2| = ε podstawienie do (3.1) i kożystaniez (3.19) daje nierownosc
ε ¬ |λ|(b− a)Mε <
albo, na wskutek (3.19)ε ¬ cε, c < 1;
która spełniona tylko przy ε = 0, co oznacza φ1 = φ2.W przypadku równań całkowych Fredholma prawdziwe jest następujące
twierdzenie:Twierdzenie (Alternatywa Fredholma)Szereg (3.9) jest rozwiązaniem niejednorodnego równania Fredholma (3.1),dla wszystkich wartości λ ∈ C, wszędzie oprócz punktów λ = λn, dla którychto punktów (wartości własnych operatora całkowego) rozwiązanie niezeroweposiada równanie jednorodne.Równoważnie, powyższe twierdzenie można sformułować następująco:Twierdzenie (Alternatywa Fredholma)Niejednorodne równanie liniowe Fredholma
λ
∫ b
a
K(x, s)ϕ(s) ds+ f(x) = ϕ(x),
ma dokładnie jedno rozwiązanie przy dowolnej funkcji f(x) (z pewnej dosta-tecznie szerokiej klasy), albo też odpowiednie równanie jednorodne
λ
∫ b
a
K(x, s)ϕ(s) ds = ϕ(x)
ma co najmniej jedno rozwiązanie nietrywialne (nie równe tożsamościowozeru).Alternatywa Fredholma jest szczególnie ważna w praktyce. Często bowiemłatwiej jest pokazać, że równanie jednorodne ma tylko rozwiązanie trywialne,niż dowodzić, że dane równanie niejednorodne ma rozwiązanie.
3.5 Równanie całkowe, blizkie do zdegenerowanych
Rozważmy niejednorodne równanie Fredholma drugiego rodzaju
λ
∫ b
a
K(x, s)ϕ(s) ds+ f(x) = ϕ(x). (3.24)
gdzie f(x) jest jednostajnie ciągła oraz
K(x, s) =m∑i=1
ai(s)bi(x) +K1(s, x) = A(s, x) +K1(s, x). (3.25)

22 3 Teoria Fredholma
Funkcje ai(s), bi(x),K1(s, x) są jednostajnie ciągły w kwadracie Ω. Funkcjewięc są ograniczone.
Skożystamy z zapisu symbolicznego: K, K+.
(K1K2)ϕ = K1(K2ϕ); (K1 + K2)ϕ = K1ϕ+ K2ϕ. (3.26)
z odpowiednimi jądrami
K1K2 ' K1 K2 =∫ b
a
K1(x, s)K2(s, p)ds. (3.27)
Równanie Fredholma (3.46) wtedy
(I = λK)ϕ = f. (3.28)
Lemat I, Jeśli A(s,x) - zdegenerowane i K(s,x) - ciągle w Ω, to A K iK A są zdegenerowane.
Lemat II, Jądro, transponowane do K1 K2 jest KT2 KT
1Twierdzenia Fredholma.Jeśli dla (3.46) |λ| < 1
M1(b−a) , gdzie M1 = Supx,s|K1|I twierdzenie Fredholma. Jeśli dla jednorodnego (3.46) (f=0) nie ma nie-
zerowego rozwiązania, to (3.46 ma rozwiązanie przy dowolnym f.Dowód Zastąpimy K = A+ K1, (??) pisze
(I − λA− λK1)ϕ = f, (3.29)
albo(I − λK1)ϕ = f + λAϕ. (3.30)
Niech(I − λK1)ϕ = η, (3.31)
|λ| < 1M1(b−a) więc
ϕ = (I + λR)η, (3.32)
gdzie R-resolwenta operatora K1 o jądrze R(s, x, λ). podstawimy (3.32) do(3.30)
η = f + λA(I + λR)η + f, (3.33)
mamy[I − λA(I + λR)]η = f. (3.34)
Jądro A(s, x) +A λR na wskutek Lematu I jest zdegenerowanym.Udowodniliszmy że każdemu rozwiązaniu ϕ równania (3.46) odpowiada
rozwiązanie η (wzór (3.31)) równania z jądrem zdegenerowanym. Odwrotnateza też jest ważna.
Taka sama teza dotyczy f=0 (równań jednorodnych).Udowodniliszmy twierdzenie Fredholma dla równań zdiegenerowanych. Je-
śli założyć że jednorodne równanie (3.46) ma tylko rozwiązanie trywialne - jed-norodne (3.34) też ma tylko trywialne. Więc niejednorodne równanie (3.34)ma rozwiazanie przy dowolnym f i tilko jedno (patrz dowod jednoznacznosci).
2. Drugie twierdzenie Fredholma. Ilośc rozwiązań.
3.6 Równanie całkowe: aproksymacja rożnicami skończonymi 23
3.5.1 Rownanie Fredholma II rodzaju o jądrze jednostajnieciagłym (Shmidt)
Wróczmy do niejednorodnego równania Fredholma drugiego rodzaju
λ
∫ b
a
K(x, s)ϕ(s) ds+ f(x) = ϕ(x). (3.35)
gdzie K(x, s), f(x) są jednostajnie ciągłę.Stw. Każde jednostajnie ciągłę jednostajnie ciągłę K(x, s) może być przy-
bliżone jednostajnie za pomocą jądrem zdegenerowanym.Mianowicze, niech jakaż funkcja dwóch zniennych K(x, s) jest jednostajnie
ciągłą w kwadracie [a, b]x[a, b]. Wg. twierdzenia Wieiersztrassa (kurs analizymat.) dla każdego ε > 0 istneje taki wielomian dwóch zmiennych K0(x, s)wystarczjąco wysokiej potęgi x, y że na kwadracie
|K(x, s)−K0(x, s)| < ε. (3.36)
Każdy z czlonów wielomiana możer być przedstawiony jako iłoczyn dwóchpotęg x i y. Więc
K(x, s) =i=N∑i=1
ai(x)bi(s) +K1(x, s), (3.37)
przy czym|K1(x, s)| < ε.
Skąd, na mocy argumentów z poprzedniego podrozdiału, w obszarze
|λ < 1(b− a)|,
są sprawiedliwy wszyskie trzy twierdzenia Fredholma. Stała ε jest diowolną,więc promiń okręgu z centrum λ = 0 może być dowolnym. To oznacza żetwierdzenia są sprawiedliwy na całej płaszczyznie λ.
3.6 Równanie całkowe: aproksymacja rożnicamiskończonymi
Niejednorodne równanie liniowe Fredholma II rodzaju
λ
∫ l
0K(x, s)ϕ(s) ds+ f(x) = ϕ(x).
Całka może być przybliżona sumą Riemanna, eśli rozbić odczynek [0,l] napododczynki
x = ih (3.38)
24 3 Teoria Fredholma
i = 1, ...n; in = l i zastąpić całkowanie sumą
λ
n∑1
K(jh, ih)ϕ(ih)h+ f(jh) = ϕ(jh),
Oznaczenia: K(jh, ih) = Kjk, ϕ(ih) = φi, f(jh) = fj ; Wyznacznik;Układ transponowany;Jeśli wyznacznik zerowy, układ jednorodny zawsze ma (niezerowe) rozwią-
zania.liczba liniowo niezależnych rozwiązań taka sama, n − r gdzie r-rank ma-
cierzy wyznacznika.Warunwk koniecznyzi rozwiązanie ()mnożąc skaliarnie ()∑
φsψs −∑
Kspφpψsh =∑
fsψs (3.39)
∑φsψs −
∑Kpsφsψph =
∑φs(ψs −
∑Kpsψp)h =
∑fsψs =)! (3.40)
Alternatywa;
3.7 Aproxymacja rożnicami skończonymi, interpretacjageometryczna
ϕ(ih) = φi jako wektor w Rn
3.8 Nierówność Bessela
Dla dowolnego f(s) fk =∫f(s)φk(s)ds - współczynnik Fouriera (Eulera –
Fouriera - często);Udowodnikiszmy
Im =∫
[f(s)− C1φ1 − ...Cmφm]2ds =∫
[f(s)]2ds+m∑1
(fk − Ck)2 −m∑1
f2k
(3.41)Oczywiszcze
Im 0.
więc kiedy fk − Ck = 0, ∫[f(s)]2ds+−
m∑1
f2k 0, (3.42)
3.9 Równanie całkowe o jądrach symetrycznych 25
albo ∫[f(s)]2ds
m∑1
f2k , (3.43)
- nierowność Bessela.Def. Układ ortonormalny φk(s), k = 1, ...∞ nazywa się zupełnym, jeśli
spełniona równość Parsevala
m∑1
f2k =
∫[f(s)]2ds, (3.44)
Def. Inaczej, układ ortonormalny φk(s), k = 1, ...∞ nazywa się zupełnym,jeśli dla ε > 0 i każdej ciąglej f(x) x ∈ [a, b] istnieje m, że∫
(f −∑
ciφi)2 < ε. (3.45)
3.9 Równanie całkowe o jądrach symetrycznych
3.9.1 Definicja
λ
∫ b
a
K(x, s)ϕ(s) ds = ϕ(x). (3.46)
K(x, s) = K(s, x)
często używany w fizyce matematycznej. Są specyficzne wlasnosci.Zbior w.w. - widmo operatora całkowego K
3.9.2 Podstawowy własnosci. Ortogonalność i normalizacja.
1. Jeśli φ - funkcja wlasna, Cφ- też. C może być dobrana
||Cφ|| = 1. (3.47)
2. Ortogonalność φ1iφ2
3. Rzeczywistość
φ = ψ1 + iψ2 ≡ (α+ iβ)∫ b
a
K(x, s)[ψ1(s) + iψ2(s)]ds (3.48)

26 3 Teoria Fredholma
3.9.3 Widmo
Tw.1 Każdy operator o jądrze symetrycznym ma jedno albo więcej wartosciwłasnych.
Dowod. Petrowski I. Wykłady...”Jądra Volterra.Cziekawy przykład (Cwi.): K(x, s) = Sin(x)Cos(s), udowodnić że w.w.
nie ma.Twierdzenie 2 Iłość w.w. na [A,B] równania całkowego o jądrze syme-
tryvznym jest ograniczona (liczba skonczona).Lemat Współczynniki Fouriera jądra K(x, s) wg. zbioru ortonormalnych
ϕn(s) są ∫ b
a
K(x, s)ϕn(s) ds =ϕn(x)λn
. (3.49)
Dowod Załóżmy że na odczynku λn ∈ [A,B], n ∈ N∞∑n=1
ϕ2n(x)λ2n
º b
a
K2(x, s)ds. (3.50)
całkując, dla ∀mm∑n=1
1λ2n
º b
a
∫ b
a
K2(x, s)dsdx. (3.51)
λ2n
Konsekwencja 1 dla λ - liczba skonczona.Konsekwencja 1 Jeśli równanie o jądrze symetrycznym ma widmo
skonczne - jadro jest zdegenerowane
K(0)(x, s) = K(x, s)−∑i=1n
1λnφi(x)φi(s) (3.52)
Na mocy Tw. 1 istneje µ, ψ
µ
∫ b
a
K(0)(x, s)ψ(s) ds = ψ. (3.53)
ψ optogonalna φn ∫ψφndx = 0. (3.54)
Sprzeczność.
3.9 Równanie całkowe o jądrach symetrycznych 27
3.9.4 Widmo operatorów o jądrach iterowanych
Kφ =∫ b
a
K(x, s)φ(s) ds (3.55)
K(Kφ) =∫ b
a
K2(x, s)φ(s) ds (3.56)
K2(x, s) =∫ b
a
K(x, t)K(t, s)dt,
K(Kn−1φ) =∫ b
a
Kn(x, s)φ(s) ds (3.57)
Dla φp i λp
φp = λpKφp = λ2pK(Kφ) = ...λpKφp = λnp K
nφp) = λnp
∫ b
a
Kn(x, s)φ(s) ds
(3.58)Tw.1 Jeśli φp i λp zą funkcje własne i wartosci własne operatora całkowego
K - φp i λnp są w.w. i f.w. operatora całkowego iterowanego o jądrze Kn(x, s).Tw.2 Dla każdego jądra iterowanego sprawiedliwe jest rozwinięcie w szereg
Kn(x, s) =∞∑p=1
φp(x)φp(s)λnp
, (3.59)
który jest jednostajnie i bezwzględnie zbieżny w kwadracie a, b (uniformly andabsolutely convergent).
Dowod Oszacujemy
Kn(x, s) =m+q∑p=m
|φp(x)φp(s)||λnp |
¬ 12|λn−2
m |
m+q∑p=m
[φ2p(x)
λ2p
+φp(s)2
λ2p
], (3.60)
za pomocą nierówności |AB| ¬ (A2 +B2) i |λp|− > 0 przy p− >∞.Nierówność Bessela:
∞∑p=1
φ2p(x)
λ2p
º b
a
K(x, s)ds ¬ D, (3.61)
Dlatego dla q > 0,m+q∑p=m
|φp(x)φp(s)||λnp |
¬ D
|λn−2p |
,
dla m → ∞, |λn−2p | → ∞. Co oznacza jednostajną i bezwzględną zbieżność
(3.59).
28 3 Teoria Fredholma
Teraz udowodnimy że suma szeregu jest równa Kn. Niech
Φ(x, s) =∞∑p=1
φp(x)φp(s)λnp
, (3.62)
Załóżmy Φ 6= Kn. Funkcja Kn(x, s)−Φ(x, s) = Q(x, s) jest symetryczna, więcna mocy Tw. 1 odpowiedni operator całkowy ma f.w. ψ dla w.w. µ:
ψ = µ
∫ b
a
Q(x, s)ψ(s)ds. (3.63)
Funkcja ψ(s) jest ortogonalna wszystkim f.w. φr operatora K, bo∫ b
a
ψ(x)φr(x)dx = µ
∫ b
a
∫ b
a
φr(x)Q(x, s)ψ(s)dsdx = (3.64)
= µ
∫ b
a
ψ(s)∫ b
a
[Kn(x, s)−∞∑p=1
φp(x)φp(s)λnp
]φr(x)dxds (3.65)
= µ
∫ b
a
ψ(s)∫ b
a
[Kn(x, s)φr(x)− φr(s)λnr
]dxds = 0, (3.66)
bo
φr(s) = λnr
∫ b
a
Kn(x, s)φr(x) dx. (3.67)
3.10 Twierdzenie Hilberta-Shmidta
Udowodnimy podstawowe twierdzenie teorii równań całkowych, która ma dużozastosowań - twierdzenie o
Twierdzenie Hilberta-Shmidta Jeśli funkcja f(x) może być przedsta-wiona w postaci
f(x) =∫ b
a
K(x, s)h(s) ds, (3.68)
gdzie h(s) jest odcinkowo funkcji ciągłej na [a,b], wtedy ona może być przed-stawuiona jako szereg Fouriera po funkcjam własnym operatora K,
f(x) =∞∑n
fnφn, (3.69)
gdzie
fn =∫ b
a
f(x)φn(x)dx, (3.70)
i szereg jest zbieżnym jednostajnie i bezwględnie na [a,b].
3.10 Twierdzenie Hilberta-Shmidta 29
DowódLemat Funkcja Q(x) ortogonalna K(x, s)∫ b
a
Q(x)K(x, s)dx = 0, (3.71)
iff ∫ b
a
Q(x)φp(x)dx = 0, (3.72)
Dowód1. Konieczność
∫ b
a
Q(x)φp(x)dx = λp
∫ b
a
∫ b
a
Q(x)K(x, s)φp(s)dsdx = λp
∫ b
a
φp(s)[∫ b
a
Q(x)K(x, s)dx]ds = 0,
(3.73)2. DostatecznośćRozważmy
J =∫ b
a
∫ b
a
Q(x)K4(x, s)Q(s)dsdx. (3.74)
J =∫ b
a
∫ b
a
Q(x)[∞∑p=1
φp(x)φp(s)λ4p
]Q(s)dsdx = (3.75)
=∞∑p=1
1λ4p
∫ b
a
Q(x)φp(x)dx∫ b
a
φp(s)Q(s)ds = 0. (3.76)
Z definicji
K4(x, s) =∫ b
a
K2(x, t)K2(t, s)dt (3.77)
0 = J =∫ b
a
∫ b
a
Q(x)∫ b
a
K2(x, t)K2(t, s)dtQ(s)dsdx =∫ b
a
[∫ b
a
Q(x)dx][∫ b
a
K2(t, s)Q(s)ds]dt
(3.78)więc ∫ b
a
K2(t, s)Q(s)ds = 0, (3.79)
mnożymy na Q(t), całkujemy∫ b
a
∫ b
a
Q(t)K2(t, s)Q(s)ds = 0, (3.80)
analogiczne
30 3 Teoria Fredholma∫ b
a
∫ b
a
∫ b
a
Q(x)K(x, t)K(t, s)dtQ(s)ds = 0, (3.81)
wtedy ∫ b
a
K(t, s)Q(s)ds = 0, (3.82)
Nota: wspóczinniki Fouriera fp = hpλp
, mianowicze
fp =∫ b
a
f(t)φp(t)dt =∫ b
a
φp(t)∫ b
a
K(t, s)h(s)dsdt =∫ b
a
h(s)∫ b
a
K(t, s)φp(t)dsdt =hpλp.
(3.83)Dowód Tw. a) Zbieżnożć jednostajna i bezwzględna. Nierówność Cauchy-
Buniakowskiego daje
m+q∑p=m
|φp(x)hp||λp|
¬
√√√√m+q∑p=m
h2p
√√√√m+q∑p=m
φp(x)2
λ2p
, (3.84)
Nierówność Bessela∞∑p=m
h2p ¬
∫ b
a
h2(t)dt, (3.85)
∞∑p=m
φp(x)2
λ2p
º b
a
K2(x, s)ds < D, (3.86)
szereg∑∞p=m h
2p -m zbieżny, go odczynek
∑m+qp=m h
2p można oszacować jako ε2
D ,stąd dla wystarczająco dużych n i dowolnego x ∈ [a, b],∑m+qp=m
|φp(x)hp||λp| ¬ ε, co oznacz zrieżność szeregu
Niech
Q(x) =∞∑p=m
φp(x)hpλp
− f(x) (3.87)
która jest ciągłą. Ona jest ortogonalna do φp; rzeczywiście∫ b
a
Q(x)φq(x)dx =∫ b
a
φq(x)[∞∑p=m
φp(x)hpλp
− f(x)]dx = (3.88)
∞∑p=m
∫ baφq(x)φp(x)hpdx
λp−∫ b
a
φq(x)f(x)dx =hqλq− fp = 0 (3.89)
więc, Q ortogonalna jądru∫ b
a
Q2(x)dx =∫ b
a
Q(x)[∞∑p=m
φp(x)hpλp
−f(x)]dx =∫ b
a
Q(x)[−f(x)]dx = −∫ b
a
Q(x)∫ b
a
K(x, s)h(s)dsdx = 0
(3.90)
3.11 Rozwiązanie równania niejednorodnego. Szereg Shmidta. 31
3.11 Rozwiązanie równania niejednorodnego. SzeregShmidta.
φ(x) = λKφ+ f = λ
∫ b
a
K(x, s)φ(s) ds+ f(x). (3.91)
Niech λ nie jest w.w. Wtedy po pierwszemu twierdeniu Fredholma równaniema jedno rozwiązanie
Twierdzenie HS dla g(x) oznacza że ona ma reprezentacje w postaci sze-regu Fouriera:
g(x) =∞∑p=1
Cpφp(x). (3.92)
Podstawiamy (3.32) w (3.91) z uwzględnieniem (3.92)
f + λ∞∑p=1
Cpφp(x) = λ
∫ b
a
K(x, s)[f + λ∞∑p=1
Cpφp(x).] ds+ f(x). (3.93)
albo∞∑p=1
Cpφp(x) =∫ b
a
K(x, s)[f(s) + λ
∞∑p=1
Cpφp(s)] ds. (3.94)
Stosujemy Tw. HS dla∫ b
a
K(x, s)f(s)ds =∞∑p=1
∫ b
a
φp(t)∫ b
a
K(t, s)f(s)dsdtφp(x), (3.95)
∞∑p=1
Cpφp(x) =∞∑p=1
fpλpφp(x) + λ
∞∑p=1
Cpλpφp(s).Funkcji
φp(x) są ortogonalny, stąd
Cp =fpλp
+ λCpλp, (3.96)
albo
Cp =fp
λp − λ. (3.96)
Powstaje reprezentacja rozwiązania phi w postaci szeregu (Shmidta)
φ(x) =∞∑p=1
fpλp − λ
φp(x) + f(x), (3.96)
który jest zbieżny bezwzględnie i jednostajnie.
32 3 Teoria Fredholma
Uwaga. Jeśli λ = λn, fn+i =∫ baf(x)φn+idx = 0, i = 1, ...s (patrz (3.96))
dla wszystkich φn+i ∼ λn. Współczynniki Cn+i zostają dowolnymi, więc roz-wiązanie ma postacz
φ(x) =s∑i=1
Cn+iφn+i +′∑
p=1
∞ fpλp − λ
φp(x) + f(x), (3.96)
gdzie∑′ oznacza sumę za wyjątkiem p = n, n+ 1, ..., n+ s.
3.12 Pełnociągłość operatorów całkowych
Pojęcie zbióru zwartego pochodzi zTw. Bolcano-Wejerstrassa Z każdego ograniczonego ciągu liczb rzeczy-
wistych można wyjąć podciąg zbieżny.Na płaszczyznie zespolonej C zbiór Z ∈ C jest zwarty iff gdy jest ogra-
niczony. Nietrudno udowodnić podobne tw. dla pzestrzeni Euclida.Dla pzestrzeni metryczne zupełnej M (oraz - Banacha albo Hilberta) po-
trzebujemy pojęcia ε-sieci:Def. Zbiór E nazywa się ε-siecią dla przestrzeni, jeżeli dla każdego punktuDef. Zbióru zwartego. Zbiór Z ∈ M jest zwarty, if z każdego ogra-
niczonego ciągu zbióru Z można wyjąć podciąg zbieżny do pewnego punktuM.
Tw. Hausdorffa Zbiór Z ∈M jest zwarty, iff gdy dla każdej liczby ε > 0istneje skończona ε-sieć dla Z
Tw. Każdy zbiór zwarty jest domknięty.Tw. Ascoliego. Zbiór funkcji Z ∈ C jest zwarty iff funkcje zbioru Z są
wspólnie ograniczone i jednakowo ciągłe.Def. Operatora pełnociągłego Operator linowy A odwzorowyjący
przestrzeni unormowane X → Y jest pełnociągły jeżeli obraz Z=AO dowol-nego zbioru ograniczonego O ⊂ X jest zwarty w przestrzeni Y (wtedy gdydla każdego ograniczonego ciągu xn ∈ X z ciągu Axn można wyjąć podciągzbieżny).
Tw. 1 Operator całkowy
Kφ =∫ b
a
K(x, s)φ(s)ds (3.96)
z jądrem ciągłym jest pełnociągły.Dowód Niech u(x) ∈ Z ⊂ C[a, b],
|u(x)| ¬ µ
Z definicji jądro operatora jest funkcją ciągłą na prostokącie abc, więc
|K(x, y)u| ¬ µ1, (3.96)

3.12 Pełnociągłość operatorów całkowych 33
Stąd||Ku|| ¬ µ1µ(b− a), (3.96)
funkcje zbióru K(Z) są wspólne ograniczone. Wobec jednostajnej ciągłosciK(x, y) dla każdej
ε > 0
istneje liczba δ > 0 taka że dla dowolnych punktów (x’,y), (x”,y)
|K(x′, y)−K(x′′, y)| ¬ ε
µ(b− a), if |x′ − x′′| ¬ δ. (3.96)
Ponieważ
K(x′)− K(x′) =∫ b
a
(K(x′, s))−K(x′′, s)u(s)ds, (3.96)
więc z (3.12) wynika że∫ b
a
(K(x′, s))−K(x′′, s)u(s)ds ¬ ε, (3.96)
jeżeli|x′ − x′′| ¬ δ.
Zatem funkcje zbioru K(Z) są jednakowo ciąglę.Na mocy twierdzenia Ascoliego zbiór funkcji K(Z) jako złożony z funkcji
wspólnie ograniczonych i jednakowo ciągłych - jest zwarty w C.


4
Transformacja Laplacea
4.1 Transformacja Laplacea
4.1.1 Zmienna zespolona
Liczba zespolona: z = a + ib, i2 = −1, spełnia standardowe (3) aksiomaty,więc tworzy przesrzeń liniową z normą |z|2 = a2 + b2. Stąd ciągłość, zbieżnośćszeregów, w tym - jednostajna.
4.1.2 Definicja transformacji Laplacea
Def. 1. Niech funkcja f(x) zdefiniowana na osi x ∈ (−∞,∞) i całka
F (s) =∫ ∞−∞
f(x) exp[−xs]dx (4.0)
zbieżna hoć na jednej prostej s ∈ C, Res = c, wtedy F (s) nazywamy obu-stronnej transformacją Laplacea funkcji f(x), oznaczmy tą relację
f(x) ..→ F (s).
Uwaga: definicja potrzebuje pasa zbieżnosci (wyniki w różnych pasach mogą-być różny.)
Jeśli funkcja f(x) zdefiniowana na półosi x ∈ [0,∞) i całka
F (s) =∫ ∞
0f(x) exp[−xs]dx (4.0)
zbieżna hoć na jednej prostej Rex = c, wtedy F (s) nazywamy jednostronnejtransformacją Laplacea funkcji f(x), oznaczmy tą relację
f(x) →.. F (s).

36 4 Transformacja Laplacea
Uwaga. Można rozważać jako przypadek obustronnego, jeśli spęłnia warunekf(x) = 0 przy x < 0
Podobieństwo do szeregów:a) półpłaszczyzna zbieżności (kręg zb.)b) pierwsze tw. Abela.Jeśli ciąg an dąży monotonicznie do zera, zaś szereg sum częściowych
ciągu bn: Bn = a1 + a2 + · · ·+ bn jest ograniczony, to szereg a1b1 + a2b2 +· · ·+ anbn + . . . jest zbieżny.
Tablica niektórych ważnych jednostronnich transformacji Laplacea.f →.. Lt[f(t)](s) conditions1 →.. 1
st →.. 1
s2
tn →.. (n!)s(n+1 n ∈ Z >= 0
ta →.. Γ (a+1)s(a+1) R[a] > −1
eat →.. 1(s−a)
cos(ωt) →.. ss2+ω2 ω ∈ R
sin(ωt) →.. ωs2+ω2 s > |I[ω]|
cosh(ωt) →.. ss2−ω2 s > |R[ω]|
sinh(ωt) →.. ωs2−ω2 s > |I[ω]|
eatsin(bt) →.. b(s−a)2+b2 s > a+ |I[b]|
eatcos(bt) →.. (s−a)(s−a)2+b2 b ∈ R
Niezbędnym elementom teorii jest odwrotna transformacja (transformata)Laplacea.
4.1.3 Wyprowadzenie wzoru na funkcje-originał
Lemat Jordana Jeśli na ciągu łuków CRn : |z| = Rn, Rez < a F(z) -¿0jednostajnie względem arg z,
limR→∞
∫CR
F (p)eptdp = 0, (4.0)
dla dowolnego t > 0. Podobnie
limR→∞
∫C′R
F (p)eptdp = 0, (4.0)
dla dowolnego t < 0.Rozważmy całkę
f(t) =1
2πi
∫ a+∞
a−i∞
ept
pdp, (4.0)
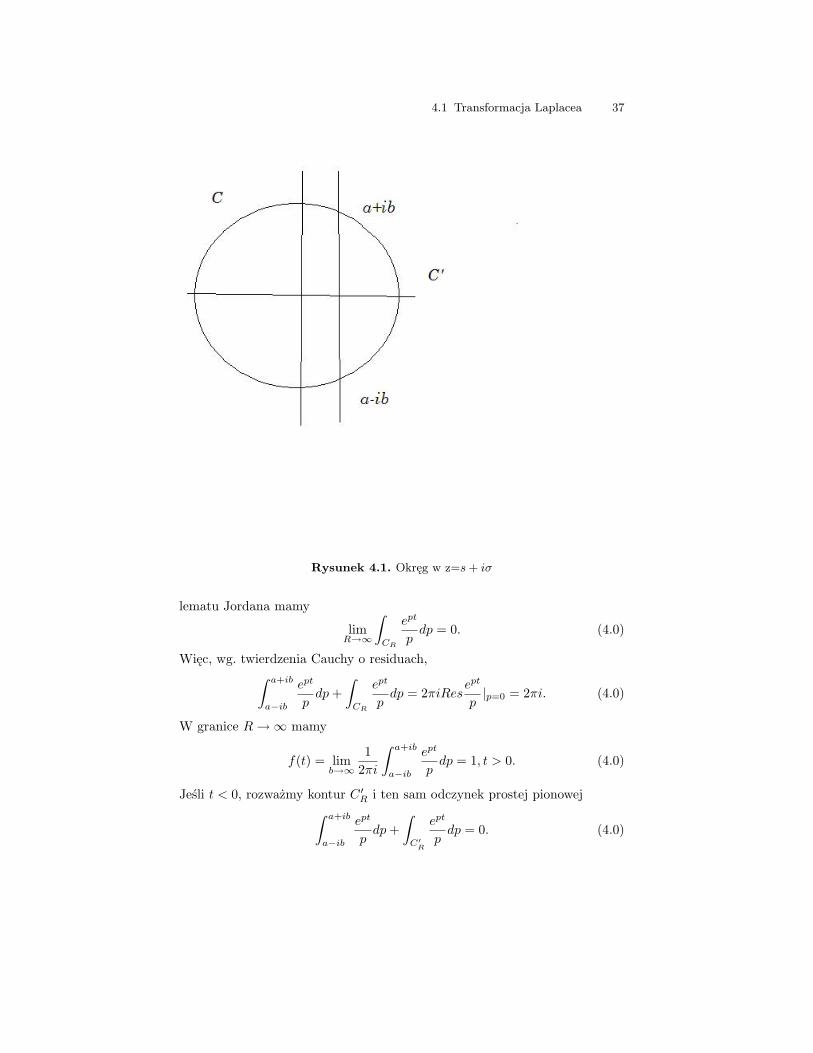
wzdłóż prostej która dzieli okręg |p| = R na dwie częśżci CR, C ′R (Fig. 4.1)Niech t > 0; 1
p → 0 przy R → ∞ jednostajnie względem argp. Na mocy
4.1 Transformacja Laplacea 37
Rysunek 4.1. Okręg w z=s+ iσ
lematu Jordana mamy
limR→∞
∫CR
ept
pdp = 0. (4.0)
Więc, wg. twierdzenia Cauchy o residuach,∫ a+ib
a−ib
ept
pdp+
∫CR
ept
pdp = 2πiRes
ept
p|p=0 = 2πi. (4.0)
W granice R→∞ mamy
f(t) = limb→∞
12πi
∫ a+ib
a−ib
ept
pdp = 1, t > 0. (4.0)
Jeśli t < 0, rozważmy kontur C ′R i ten sam odczynek prostej pionowej∫ a+ib
a−ib
ept
pdp+
∫C′R
ept
pdp = 0. (4.0)
38 4 Transformacja Laplacea
Mamy reprezentacje funkcji skokowej (Heaviside’a)
f(t) =1
2πi
∫ a+i∞
a−i∞
ept
pdp = H(t). (4.0)
Można ieraz przesunuć współżędną t
H(t− τ) =1
2πi
∫ a+i∞
a−i∞
ep(t−τ)
pdp (4.0)
i, dalej, po zmianie oznaczeń,
H(t− s1)−H(t− s2) =1
2πi
∫ a+i∞
a−i∞
ep(t−s1) − ep(t−s2)
pdp, (4.0)
która reprezentuje impuls Fig. 4.2Funkcja o dowolnym kształcie może być przybliżone zapisana jako
f(x) ≈n∑1
f(si)(H(si)−H(si+1)) (4.0)
4.1.4 Trzy twierdzenia [23]
Tw. 1 Niech F (z) jest funkcją regularną w pasie a ¬ Rez ¬ b (w każdympunkcie ∃ szereg Taylora) . Jeśli funkcja F (z) spełnia warunki
|F (z)||z|−α−1 , 0 < α < 1, z →∞, a ¬ Rez ¬ b, (4.0)
to funkcja
f(x) =1
2πi
∫ c+i∞
c−i∞F (z)exzdz, (a ¬ c ¬ b) (4.0)
nie zależy od c, i, dla dowolnego a ¬ c ¬ b,
|f(x)e−cx| ¬M, |f(x)e−cx − f(ξ)e−cξ| ¬M1|x− ξ|. (4.0)
Przy czym f(x) ..→ F (z) (a ¬ c ¬ b),if b =∞, to f(x) = 0, przy x < 0 i f(x) →.. F (z).Dowódprzy z = c + iy mamy |exp[xz]| = exp[cx], warunek (6.1.4) gwaran-
tuje zbieżność bezwzględną i jednostaną całki na dowolny7m skonczonym od-czynku osi x.
Udowodnimy że dla (a ¬ Rez ¬ b)
f(x) ..→ F (s).
4.1 Transformacja Laplacea 39
Rysunek 4.2. Impuls o wysokosci 1
40 4 Transformacja Laplacea
Mnożymy (4.1.4) na e−xζ i całkujemy po x od −R do R. Przy x > 0 weżmyc = a, natomiast przy x < 0 bieżymy c=b. Całka w (4.1.4) jest zbieżnajednostajnie, więc zmiana pożądku całkowania jest możliwa:∫ R
−Rf(x)e−xζdx =
12πi
∫ a+i∞
a−i∞F (z)
∫ R
0exze−xζdxdz+
12πi
∫ b+i∞
b−i∞F (z)
∫ 0
−R′exze−xζdxdz.
(4.0)
=1
2πi
∫ a+i∞
a−i∞F (z)
∫ R
0ex(z−ζ)dxdz +
12πi
∫ b+i∞
b−i∞F (z)
∫ 0
−R′ex(z−ζ)dxdz,
(4.0)całkując po x, mamy
=1
2πi
∫ a+i∞
a−i∞F (z)[
ex(z−ζ)
z − ζ]R0 dz +
12πi
∫ b+i∞
b−i∞F (z)[
ex(z−ζ)
z − ζ]′0Rdz, (4.0)
= − 12πi
∫ a+i∞
a−i∞
F (z)z − ζ
dz+1
2πi
∫ b+i∞
b−i∞
F (z)z − ζ
dz+ ε(a,R, ζ)− ε(b, R′, ζ), (4.0)
gdzie
ε(c, r, ζ) =1
2πi
∫ c+i∞
c−i∞F (z)
er(z−ζ)
z − ζdz (4.0)
Oszacowanie daje dla z = c+ iy
|ε(c, r, ζ)| ¬ 12π
∫ c+i∞
c−i∞|F (z)| |e
r(z−ζ)||z − ζ|
|dz| = 12π
∫ c+i∞
c−i∞|F (z)|e
r(c−Reζ)
|z − ζ|dy
(4.0)jeśli a− δ ¬ Reζ ¬ b− δ,
|eR(a−Reζ)
|z − ζ|¬ e−Rδ
δ,eR′(b−Reζ)
|z − ζ|¬ |e
−R′δ
δ, (4.0)
więc
|ε(a,R, ζ)|+ |ε(b, R′, ζ)| ¬M ′(e−Rδ
δ+e−R
′δ
δ), (4.0)
gdzie
M ′ =1
2πmaxa¬c¬b
∫ c+i∞
c−i∞|F (z)|dy (4.0)
Wartość (4.1.4) dąży do zera przy R,R′ → ∞, w takich warunkach całka pocałej osi rzeczywistej jest zbieżna jednostajnie (po ζ) przy δ > 0 i∫ ∞−∞
f(x)e−xζdx =1
2πi
∫ a+i∞
a−i∞
F (z)z − ζ
dz − 12πi
∫ b+i∞
b−i∞
F (z)z − ζ
dz =∫L
F (z)z − ζ
dz.
(4.0)L - granica pasa a < Rez < b. Stosujemy wzór całkowy Cauchy, co daje F (z).
4.1 Transformacja Laplacea 41
Lemat 1 Niech f(x) jest ciągła na całej osi, za wykluczeniem przeliczlnegpzbióru punktów które nie mają skonczonych punktów skupienia. Jeśli∫ ∞
−∞|f(x)|dx <∞, (4.0)
to ∫ ∞−∞
f(x) exp[iνx]dx→ 0, (4.0)
przy ν → ±∞.Dowod Udowodnimy najperw że stwierdenie lematy jest sprawiedliwe dla
f(x) rownej zeru przy x (a, b) i jednostajnie ciągłej na tym odczynku.Idea dowodu w tym że funkcja exp[iνx] szybko oscyluje przy dużych ν; wszczegulnosci przy zmianie x na π
ν funkcja exp[iνx] zmienia znak. Mamy∫ b
a
f(x) exp[iνx]dx =∫ b−πν
a−πνf(ξ +
π
ν) exp[iν(ξ +
π
ν)]dx =, (4.0)
−∫ b−πν
a−πνf(ξ +
π
ν) exp[iνξ]dx. (4.0)
Niech ν > 0, wtedy
2∫ b
a
f(x) exp[iνx]dx = (4.0)
−∫ a
a−πνf(ξ+
π
ν) exp[iνξ]dx+
∫ b
b−πνf(ξ) exp[iνξ]dx+
∫ b−πν
a
[f(x)−f(ξ+π
ν)] exp[iνξ]dx.
(4.0)Każdy z tych wyrazów dąży do zera: dwa pierwszych bo droga całkowaniadąży do zera, trzeczy - bo funkcja pod całką dąży do zera.
Dla dowodu pełnoj wersji lematu potrzebujemy udowodnoc że dla ∀ ε >0,∃ N takie że
|∫ ∞−∞
f(x) exp[iνx]dx| < ε, (4.0)
wybieramy takie duże A, żeby∫|x|>A
|f(x)|dx < ε, (4.0)
potem, na odczynku (−A,A) są punkty nieciagłosci f o skonczonej iłosci.Wybierając na tyle małe δk,∑
k
∫δk
|f(x)|dx < ε, (4.0)
Taki wybór A, δk jest możliwy dzięki całkowalnosci bezwzględnej f na osi.

42 4 Transformacja Laplacea
Po wyczynaniu δk zostaje skończona iłość odczynków, na których f jestciągłą. Całka po każdemu dąży do zera przy ν → ∞, jak już udowodniono.Mozemy więc wybrać N takim dużym, żeby przy |ν| > N suma całek odf(x) exp[iνx] po wszystkim wspomnianym odczynkam była mniej .
Wtedy przy |ν| > N mamy
|∫ ∞−∞
f(x) exp[iνx]dx| ¬∫|f(x)|+
∑∫+|∑∫
|, ε (4.0)
Tw. 2 Niech 0 < α < 1, funkcja F(z), jest regularną w pasie a ¬ Rez ¬ bprzy warunkach
F ′(z) = O(z−α−1), F (z)→ 0(z →∞a ¬ Rez ¬ b). (4.0)
Wtedy wzór (4.1.4) jest ważnym przy x 6= 0. Jesli g(x) = xf(x) (x 6= 0) iwybrać g(0) = 0, to przy dowolnym a ¬ c ¬ b
|g(x) exp[−cx]− g(ξ) exp[−cξ]| < |x− ξ|α. (4.0)
Przy tym f(x) ..→ F (s). (a ¬ Rez ¬ b) i, jeśli b = +∞, f(x)=0 przy x < 0 if(x) →.. F (s)..
4.1.5 Transformacje Fouriera i Mellina
Transformacje Fouriera funkcji bezwzględne całkowalnej na osi x nazywa się:
φ(s) =∫ ∞−∞
f(x)eisxdx, (4.0)
s ∈ −∞,∞. Jeśli F(x) dwustronna transformacja Laplacea tej samej f(x),mamy
φ(s) = F (−is).
Transformacje Mellina funkcji g(t), t > 0, takiej że∫ ∞0|g(t)|tρ−1dt <∞, (4.0)
nazywa sie
G(z) =∫ ∞
0g(t)tz−1dt, (Rez = ρ). (4.0)
Jesli F(z) - obustronna transformacja Laplacea funkcji f(x)=f(ex), toF(z)=G(z).Wzory poazwalają wyprowadzić wlasności transformacji Mellina ze wzo-
rów na własnosci transformacji Laplacea.Odwrotna transformacja Mellina:
g(t) =1
2πi
∫ ρ+i∞
ρ−i∞G(z)t−zdz, (t > 0) (4.0)
4.1 Transformacja Laplacea 43
4.1.6 Aplikacje
Równanie Mittag-Lefflera
y′′′ + xy = 0 (4.0)


5
Rozwiązanie Równań całkowych I rodzaju(zagadnień odwrotnych). Metody regularyzacji.
5.1 Zagadnienia odwrotne
5.1.1 Metoda Gaussa
Historia: rozważmy problem wyznaczenia parametrów orbity planety (Saturn,Jupiter opracowywał Laplace).Elipsa też może byc modelem, jeżeli znamy jej parametry...
Aiz = ai1z1 + ...+ aimzm = Ui (5.0)
pomiar w czasie tiUi reprezentuje pomiaraik też wartości mierzone (parametry położenia punktu obserwacji)i = 1, ..., n, n > mRównań jest więcej niż zmiennych; rozwiązanie ogólnie nie istneje.
W takim razie na podstawie matematyki klasycznej wprowadzamy z0 repre-zentujący położenie.
Karl Gauss:Metoda najmniejszych kwadratów (the least-squares method):przy regresji liniowejŻądamy minimalizacji funkcji ξ2, która mierzy odchylenie zadanej zależ-
ności funkcyjnej od punktów doświadczalnych. W przypadku funkcji liniowejf(x) = ax + b, funkcja ξ2 sprowadza się do
ξ2(a, b) ==∑i
(yi − axi − b)2
σ2i
, (5.0)
gdzie σi to odchylenie standardowe (niepewność pomiaru) danego punktu po-miarowego (w zmiennej y) Aby znaleźć minima tej funkcji ze względu naparametry a i b, różniczkuje się po a i b i przyrównuje do 0.
46 5 Rozwiązanie Równań całkowych I rodzaju (zagadnień odwrotnych). Metody regularyzacji.
W celu obliczenia niepewności uzyskanych wartości współczynników a i b,korzysta się ze wzoru na błąd pośredni (różniczka zupełna) funkcji zależnej odparametrów f(yi) (a(yi),b(yi)), przyjmując, że niepewność pomiarowa wynikatylko z niepewności zmiennej y.
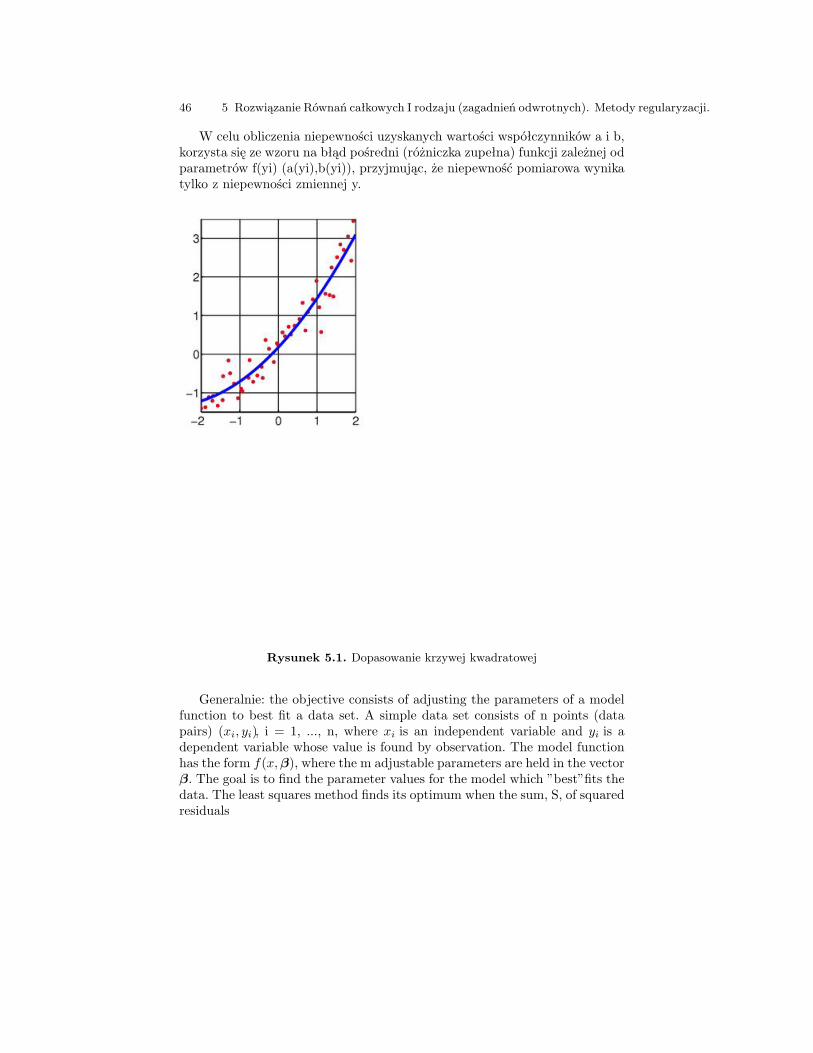
Rysunek 5.1. Dopasowanie krzywej kwadratowej
Generalnie: the objective consists of adjusting the parameters of a modelfunction to best fit a data set. A simple data set consists of n points (datapairs) (xi, yi), i = 1, ..., n, where xi is an independent variable and yi is adependent variable whose value is found by observation. The model functionhas the form f(x,β), where the m adjustable parameters are held in the vectorβ. The goal is to find the parameter values for the model which ”best”fits thedata. The least squares method finds its optimum when the sum, S, of squaredresiduals

5.1 Zagadnienia odwrotne 47
S =n∑i=1
ri2
is a minimum. A residual is defined as the difference between the valuepredicted by the model and the actual value of the dependent variable
ri = yi − f(xi,β).
Przykłady z rozdziałów poprzednich doprowadzili do równań całkowychliniowych I rzędu. W przypadku równania Fredholma∫ b
a
K(x, s)φ(s)ds = f(x), x ∈ [c, d] (5.0)
po dyskretyzacji b−an = h, sj = a + jh, j = 0, ..., n; d−cm = τ, xi = c + iτ, i =
0, ...,m mamyn∑j=0
K(xi, sj)φ(sj)h = f(xi), (5.0)
odżymaliszmy układ rownań liniowych z macierżą n + 1 × m + 1, ogólnieniekwadratowej
Kij = K(xi, sj)h. (5.0)
I =m∑i=0
[n∑j=0
K(xi, sj)hφ(sj)− f(xi)]2 = ||Kφ− f ||2, (5.0)
Warunek minima: teraz patrzymy na I jako funkcje współżędnych wektora φ:
∂I
∂xk= 0. (5.0)
Liczymy pochodną
∂I
∂xk=
∂
∂xk
m∑i=0
[n∑j=0
Kijφj − fi][n∑l=0
Kilφl − fi] = (5.0)
∂
∂xk
m∑i=0
[n∑
j,l=0
KijKilφjφl − 2fin∑j=0
Kijφj + f2i ] = (5.0)
m∑i=0
[n∑
j,l=0
KijKil(δkjφl + φjδkl)− 2fin∑j=0
Kijδkj ] = 0. (5.0)
suma po j,l-¿j:
m∑i=0
[n∑j
(KikKijφj +KijKikφj)− 2fiKik] = (5.0)

48 5 Rozwiązanie Równań całkowych I rodzaju (zagadnień odwrotnych). Metody regularyzacji.
W postaci macierzowejKTKφ−KT f = 0,
Formalnie rozwiązujemy (KTK już kwadratowa.)
φ = (KTK)−1KT f.
Metoda Gaussa opiera sie na funkcje (jeśli n→∞ - funkcjonał)√∑i
(Ui −Aiz0)2 = ‖∑i
(Ui −Aiz0)‖ = ‖h0‖ (5.0)
szukamy z0 żeby ‖h0‖ było minimalne:min‖h0‖ ⇒ z0
Doświadczenie wskazuje na to, że jest kilka rozwiązań z0i. Zbiór rozwiązańtworzy przestrzeń liniową.
z0 → z′0 =∑Si=1 Ciz0i z
′0 ∈ ZS
‖zn‖ = min‖z′‖, zn-wektor normalny (rozwiązanie normalne)
Metoda najmniejszych kwadratów nie pozwala na pozbycie się nieregularności.
z0 ∼ min‖Ui −Az‖2(A,U) nie może być podstawą dla stabilnego algorytmu
Rozwżmy experyment matematyczny
z1 + 7z2 = 5 (5.1)√
2z1 +√
98z2 =√
50 (5.2)
stądz2(7√
2−√
98) = 5√
2 =√
50 (5.2)
W obliczeniach numerycznych mamy√
2 tylko z pewną dokładnością: 10−n
z1|0, .|1, 6|5, .n|100|300|500
„Poprosiłem” rozwiązać ten system SWP (Scientific workplace):
x√
2 + y√
98 = 5
x + 7y =√
50

5.1 Zagadnienia odwrotne 49
, Solution is:[x = −8. 170 0× 1028, y = 1. 167 1× 1028
]Typowy przykład analityczny:
z1 + z2 = 1(1 + µ)z1 + z2 = 1 + δz1 = δ
µ , z2 = 1− δµ ; δ, µ - dokładność
Zwiększając dokładność, szkodzimy stabilności wyników!
SWP:
x√
2 + y√
98 = 5
x + 7y =√
50
, Solution is:[x = −8. 170 0× 1028, y = 1. 167 1× 1028
] Jeżeli układ ma rozwiązanie (ściśłe) to rozwiązanie uogólnione i ścisłe po-
krywają się Koncepcja musi być uniwersalna
Tw. 1 (Tikhonow 1985) Nie ma żadnego stabilnego rozwiązania układurównań liniowych jedynie na bazie informacji o indywidualnych poszerzonychmacierzach Anm, Un.
Żadna obróbka danych opartych na A i U nie daje stabilnego rozwiązania(żaden algorytm)
Rozważmy macierz indywidualnie poszerzoną parametrycznie (MIPP)Poszerzenie może zmienić jakościowo układ równań.
Tw. 2 (Tikhonow 1985) Podana MIPP [A,U,A0] pozwala określić sta-bilne równania uogólnione (RU)∆0 = (δ0, µ0)δ0-dokładność pomiaru A, µ0-dokładność pomiaru U
Dowód metody opiera sie na sformułowaniu fizycznym (wiedza a priori)
Wyniki regularyzacji przykładu:
Niech zS , zR, zN (wektory) są: ścisłe, reguralne, normalne.
Poszerzona macierz:Rozważmy MIPP ∆0 = (δ0, µ0) - parametry poszerzeniaklasa macierzy:
50 5 Rozwiązanie Równań całkowych I rodzaju (zagadnień odwrotnych). Metody regularyzacji.
‖U−U′‖ ¬ δ0 (5.3)
‖A−A′‖ ¬ µ0 (5.4)
A, U są równoważne w stosunku do dokładności
Az = U
Wprowdźmy parametr stabilizujący δ
Aδ ∈ AKażdy parametr regularyzacji wprowadza pewną macierz A
Istneje wielu sposobów na relaryzacja (stabilizacje) patrz np. [18].1. Dyskretna transformacja Fouriera.Transformacja ciągła - patrz rozd. 4, wzór (4.6). Zapiszmy odpowidnik dla
czasowego procesu
Y (ω) =1√2π
∫exp[ωt]y(t)dt. (5.4)
Możliwa regularyzacja
Y (ω) =1√2π
∫exp[ωt]

6
Algorytm aproksymacji całkowej, metodaregularyzacji Tikhonowa
6.1 Metoda Regularyzacji Tichonowa
6.1.1 Regularyzacja metody Fouriera.
Zagadnienie obliczenia TF jest typowym zle uwarunkowanym, bo pochodziz równania całkowego Fredholma I rodziaju. Rozwiązanie jest jawnym, aleczasem też potrzebuje regularyzacji. Przykładem może byc wprowadzenie ob-czynania z parametrem α (regularyzacja Tikhonova rzędu n):
Y (ω) =1√2π
∫exp[ωt]y(t)1 + αt2n
dt, (6.0)
Przykładowe obliczenia ilustrowany w [18].Ogólnie metoda opiera się na danych a priori, w formie matematycznej,
np. że funkcja poszukiwana z(t) jest funkcją ciągłej, albo istnieje z′ = dzdt .
Takie założenia ogólne związane są z fizyką
6.1.2 Methoda Moore-Penrose
Rozważmy równanie macierzowe o wielu rozwiązaniach
Ax = y, x ∈ Rn, y ∈ Rm, (6.0)
gdzie A - macierz prostokątna m x n. Więc II warunek Hadamarda nie jestspełniony.
Definicja Rozwiazanie jest normalnym, jeśli
‖x‖2 = min. (6.0)
Można udowodnic, że rozwiązanie 6.1.2) równania (6.1.2,istneje i daje się wzo-rem

52 6 Algorytm aproksymacji całkowej, metoda regularyzacji Tikhonowa
x = AMP y, albo AMPAAMP = AMP (6.0)
macierz n×m pseudoodwrotna Moore-Penrose’a AMP zanjduje się jako roz-wiazanie
A = AAMPA. (6.0)
Są lepsze algorytmy: patrz, np. [24].Wiki:In mathematics, and in particular linear algebra, the pseudoinverse AMP
of an matrix A is a generalization of the inverse matrix. More precisely, thisarticle talks about the Moore-Penrose pseudoinverse, which was independen-tly described by E. H. Moore in 1920 and Roger Penrose in 1955. Earlier,Fredholm had introduced the concept of a pseudoinverse of integral operatorsin 1903. The term generalized inverse is sometimes used as a synonym forpseudoinverse.
6.1.3 Pzykład regularyzacji Tikhonova w L2
Rozważmy równanie Fredholma I rodzaju na x ∈ [c, d],∫ b
a
K(x, s)φ(s)ds = f(x), (6.0)
albo w postaci operatorowejKφ = f.
Można powiedzeć że metoda Tikhonova łączy podejszcze Gaussa i Moore-Penrose’a. Mianowicze poszukuje się minimum sumy odległości z wagą α
Tα[φ] = α‖φ‖2 + ‖Kφ− f‖2 (6.0)
Def. 1. Funkcjonał Tikhonova w L2. Według definicji normy przez iłoczynskalarny w przestrzeni Hilberta φ ∈ L2[a, b],
‖φ‖2 = (φ, φ) =∫ b
a
φ2(s)ds
, więc, zakładajac żeKφ, f ∈ L2[b, c],
przepisujemy (6.1.3) jako
Tα[φ] =∫ d
c
[∫ b
a
K(x, s)φ(s)ds− f(x)]2dx+ α
∫ b
a
(φ2(s))ds. (6.0)
Dyskretyzacja funkcjonała (6.1.3) na siatkie x = c+ hi, s = a+ τj, φ(a+τj) = φj , f(c+ hi) = fi,K(c+ hi, φj) = Kij , i = 0, 1, ...m; j = 0, 1, ..., n. dajefunkcje zmiennych φj , które reprezentuje funkcje poszukiwaną

6.1 Metoda Regularyzacji Tichonowa 53
Tαd =m∑i=1
h[τn∑j=1
Kijφj − fi]2 + α
n∑j=1
τφ2j , (6.0)
gdzie α nazywa się parametrem regularizacji.
Koniecznym warunkiem minimimum funkcionała discretyzowanego (funk-cji (6.1.3)) jest układ rownań Eulera który powstaje po rózniczkowaniu wzglę-dem φj i przyrównaniu do 0.
∂Tαd∂φj
= 0. (6.0)
Odrzymujemy :
m∑i=1
n∑j=1
hτKijKikφj + αhφk −m∑i=1
hKikfi = 0. (6.0)
Postacz macierzowa rozwiązania
φ = (KTKhτ + αI)−1KThτf. (6.0)
Dobrze widać, że równanie (6.1.3) i go rozwiązanie dązy do równań teoriiGaussa kiedy α→ 0.
Wiki: The pseudoinverse can be computed via a limiting process:
AMP = limα→0[ATA+ α]−1 (6.0)
if the limit exists. (see Tikhonov regularization). These limits exist even if(AA * ) - 1 and (A * A) - 1 do not exist.Wybór α
Różne metody wyboru.
Oszacowanie za pomocą przykładów testowych. Schemat: wybieramy funk-cje φ0 którą łatwo scałkować. Obliczamy odpowiednie
f0(x) =∫ d
c
K(x, s)φ0(s)ds. (6.0)
Po f0 wyliczamy φ(α) = (KTKhτ + αhI)−1KThf0 Funkcjonał odchyleń
δ(α) = ‖φ0 − φ(α)‖2 (6.0)
jest minimalnym, jeślidδ(α)dα
= 0.
- jest równaniem dla α. Na bazie tego stwierdzenia Prowadzenie eksperymentów numerycznych, wypracowana technologia ta-
kich eksperymentów, symulacja. Metoda iteracyjna, kolejne przybliżenia zα → z
z-istotne rozwiązanie fizyczne. Oszacowanie za pomocą nierownosci matematycznych (patrz załącznik)

54 6 Algorytm aproksymacji całkowej, metoda regularyzacji Tikhonowa
6.1.4 Warunki brzegowe
Dopuszczmy funkcja poszukiwana na x ∈ [a, b] spełnia warunki
φ(a) = φ[b] = 0, (6.0)
taką wiedzę powinnyśmy uwzgłędnić przy tworzeniu funkcjónałów i definicjiprzestrzeni.
Naprzykład, yakie założenie oznacza że po dyskretyzacji suma już nie obe-lmuje punkty a,b:
Tαd =m∑i=1
h[τn∑j=1
Kijφj − fi]2 + α
n∑j=1
τφ2j , (6.0)
bedzie
6.1.5 Następny przykład - przestrzeń Soboleva
Rozważmy‖z, z′‖W 1
1= max z +max′. (6.0)
t ∈ [a, b].Inaczej, z, z′ ∈ W 1
2 - przestrzeń Sobolewa (z pochodną z′; index - 1 - rządpochodnej, index 2 odzwierciedla sposób wprowadzenia normy:)
‖z, z′‖2W 12
=∫ b
a
[z2(s) + z′(s)2]ds. (6.0)
Rozważmy równanie całkowe Fredholma I rzędu:
Az ≡∫ b
a
K(x, s)z(s)ds = U(x), (6.0)
jądro K(x, s) ciągłe na prostokącie a,b,c.Norma operatora - uogólnienie normy (Frobeniusa) prostokątnej macierzy A:
‖A‖2L2 = Tr(ATA),
mianowicze
‖K‖2L2 =∫ c
b
∫ b
a
K(x, s)K(s, x)(s)ds. (6.0)
Dopuszczmy ze wiemy (a priori) że ścisłe rozwiązanie jest elementem W 12 :
zs ∈W 12
i przybliżone Uδ ∈ L2[c, d],

6.1 Metoda Regularyzacji Tichonowa 55
‖Uδ − U‖Lz ¬ δ, (6.0)
gdzie Uδ-rozwiązanie przybliżone, U,Kh(x, s)-wyniki pomiarów. Przy czym
‖K −Kh‖L2 ¬ h⇒ ‖A−Ah‖W 12→L2 ¬ h
A-operator całkowy
Stwierdzenie o zbieżności jednostajnej aproksymacji przy założeniuW 12 [a, b]→
C[a, b], C-przestrzeń funkcji ciągłych.
Funkcjonał Tikhonowa:
Mα[z] =∫ c
a
[∫ b
a
Kh(x, s)z(s)ds− Uδ(x)]2dx+ α
∫ b
a
[z2(s) + z′(s)2]ds (6.0)
α- podobnie jako w (6.1.3) - parametr regularyzacji.
SKUTECZNE ZASTOSOWANIE NUMERYCZNE Rozważmy Równanie Eu-lera dla (6.1.5)
Bαz = Bz + αCz = fδB = BT -nieujemne
Funkcjonał T.7→ Dyskretyzacja (∫→∑
) 7→ Równanie Eulera 7→ Algorytmobl. z = B−1
α f
Zaletą funkcjonału są efektywne algorytmy.
Dla zbyt małych α mamy niestabilny problem!
Wzór na ocenę odchylenia:dla Ax = y ⇒ ‖δy‖
‖y‖ < cond(A)( δ‖f‖ + h
‖A‖ )
‖f ′ − f‖ ¬ δ (6.1)
‖A′ −A‖ ¬ µ (6.2)
cond(A) = ‖A‖‖A−1‖ (6.3)
Istnieje również odwrotne twierdzenie Tikhonowa:α⇒ δ, h( α określa δ i h potrzebne do stabilnego rozwiązania.)

56 6 Algorytm aproksymacji całkowej, metoda regularyzacji Tikhonowa
6.2 Przykłady. Równanie dyfuzji.
6.2.1 Zagadnienie dla równania dyfuzji ź odwrotnym czasem”.
Rozwazmyut = uxx, x ∈ [0, l], t ∈ [0, T ]; (6.3)
równanie może posłużyć dla opisu zmian temperatury (dla dyfuzji - koncen-tracji) w prętie.
Zagadnienie klasyczne (Cauchy)
u(x, 0) = f(x), u(0, t) = u(l, t) = 0. (6.3)
jest stabilne (patrz dowód w scryptie ŻRiC”).Sformulujmy jeszcze jedno zagadnienie z oczywistym sensem fizycznym.
Chcemy oszacować rozkład gęstości masy w rurze w czasach t ∈ [0, T ] na pod-stawie pomiaru w chwili T . Mamy zagadnienie: równanie (6.2.1) plus warunkibrzegowe
u(x, T ) = f(x), u(0, t) = u(l, t) = 0. (6.3)
Rownoważnie do (6.2.1) po zamianie t→ T − t
ut = −uxx, x ∈ [0, l], t ∈ [0, T ]; u(x, 0) = f(x) (6.3)
- historia procesa.
6.2.2 Zagadnienie dla równania dyfuzji: funkcja żródła.
Pomiary w jednym punkcie. Rozwiazanie metodą Fouriera.Poprawność dzia lania obydwu Metod Regularyzacji sprawdzamy po-
przez porównanie wyników otrzymanych z rozwiaιzania zagadnienia odwrot-nego z danaι wcześniej funkcjaι.
Aby móc sformu lować, a nasteιpnie rozwiaιzać zagadnienie odwrotne,potrzebujemy model zjawiska oraz określonaι liczbeι pomiarów.
1. Model jest nam dany w postaci równania różniczkowego dyfuzji cieplnej:
du(t, x)dt
= a2 d2u(t, x)dx2 + f(x). (6.3)
a - sta la dyfuzjif(x) - funkcja źród la
Do pe lnego opisu zjawiska potrzebne nam saι warunki brzegowe:
u(t, 0) = u(t, l) = 0,u(0, x) = 0.
(6.3)
gdzie l jest d lugościaι preιta.

6.2 Przykłady. Równanie dyfuzji. 57
2. Pomiarami saι sprawdzenia temperatury preιta w określonym punkcie x0,co pewien sta ly odcinek czasu.
3. W przypadku testu i ustalenia parametru regularyzacji α jako w (??);temperatureι w czasie T otrzymujemy poprzez rozwiaιzanie zagadanieniaprostego dla danego modelu funkcji źród la w punkcie x0. Do otrzymanegow ten sposób pomiaru wprowadzamy szum, który w warunkach laborato-ryjnych by lby wynikiem niedoskona lości aparatury pomiarowej.
Testową funkcję do której przyrównujemy wyniki rozwiaιzania zagad-nienia odwrotnego dana jest wzorem:
f(x) =
1 dla 13 ¬ x ¬
23
0 dla 0 ¬ x ¬ 13 , 2
3 ¬ x ¬ 1(6.3)
6.2.3 Wygenerowanie testowych wartosci temperatury.
Wartsoci u trzymujemy rozwiaιzujaιc równanie (1) przy warunkach (1).
Poszukujemy rozwiaιzania w postaci szeregu Fouriera:
u(x, t) =∞∑n=1
Tn(t)sin(nπx
l) (6.3)
Zak ladamy również, że f(x) może być przedstawione w postaći:
f(x) =∞∑n=1
Ansin(nπx
l) (6.3)
An =2l
∫ l
0f(x)sin(
nπx
l)dx gdzie n = 1, 2, 3.. (6.3)
Podstawiajaιc (6.2.3) i (6.2.3) do równania (1) otrzymuemy:
∞∑n=1
dTn(t)dt
sin(nπx
l) =
∞∑n=1
a2(nπ
l)2Tn(t)sin(
nπx
l) +
∞∑n=1
Ansin(nπx
l) (6.3)
Odpowiednio dzielaιc otrzymujemy:
dTn(t)dt
− a2(nπ
l)2Tn(t) = An. (6.3)
Po rozwiązaniu tego równania różniczkowego przy warunkach (1) dostajemy:
Tn(t) =∫ t
0Anexp[−(
anπ
l)2(t− τ)]dτ gdzie n = 1, 2, 3.. (6.3)
Podstawiajaιc (6.2.3) i (6.2.3) do (6.2.3) uzyskujemy wzór :

58 6 Algorytm aproksymacji całkowej, metoda regularyzacji Tikhonowa
u(t, x) =2l
∞∑n=1
sin(nπx
l)(
l
anπ)2(1− exp[−(
anπ
l)2t])
∫ l
0f(x′)sin(
nπx′
l)dx′
(6.3)Dla uproszczenia obliczeń przyjmujemy za lożenia:
a = 1,l = 1,n = 20.
(6.3)
Możemy dać ma le n, gdyż dla wyższych, ich istotność dla wyniku jest znikoma.
Majaιc gotowy wzór oraz danaι funkcje f(x), obliczamy temperature wpunkcie x = x0 = 1
2 , dla 12 czasów t odpowiednio 0.1, 0.2, ..., 1.2. Dodat-kowo wyliczone temperatury poddajemy żealnemuźaszumieniu.
Temperatury, które zosta ly wyliczone:
0.045510.060680.066200.068130.068930.069150.069340.069230.069310.069620.069540.06930
(6.3)
6.2.4 Sformu lowanie zagadnienia odwrotnego.
Rozwiaιzanie (10) można przedstawiś w postaci równania Fredholma I rzeιdu:
K(t, s) =2l
∞∑n=1
sin(nπx0
l)sin(
nπx
l)(
l
anπ)2(1− exp[−(
anπ
l)2t]) (6.3)
f(s) = f(x)
u(t, x0) = g(t)
gdzie x0 jest pomiarem
Laιczaιc otrzymujemy:
g(t) =∫ l
0K(t, s)f(s)ds (6.3)

6.2 Przykłady. Równanie dyfuzji. 59
Równanie (14) macierzowo zapisujemy:
g = Mf (6.3)
Zagadnienie odwrotne, polega na wyliczeniu funkcji źród la f przez odwróceniemacierzy M przy danych g.
f = M−1g (6.3)
Macierz pomiarów temperatury g jest wygenerowywana (12).
Element macierzowy macierzy M wynosi:
mij =10∑n=1
2sin(nπx0
l)sin(
nπxil
)(l
anπ)2(1− exp[−(
anπ
l)2tj ]) (6.3)
A pe lne równanie macierzowe (15) wyglaιda nastepujaιco :
g0
g1
g2
g3
g4
g5
g6
g7
g8
g9
g10
g11
=
m0,0, . . .,m12,0
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .m0,11, . . .,m11,11
f0
f1
f2
f3
f4
f5
f6
f7
f8
f9
f10
f11
(6.3)
Aby wyznaczyć kołumnę g, zgodnie z (6.2.4) należy odwrocić macierz M .
6.2.5 Rozwiaιzanie zagadnienia odwrotnego.
Rozwiaιzanie za pomocaι Metody Gaussa-Tikhonova
W przypadku tej metody funkcjonał Tikhonowa w przestreni Sobolewa jest
Mα(f) =∫ d
c
∫ b
a
[K(x, s)f(s)ds−u(x)]2dx+α∫ b
a
(p(s)(f ′(s))2 +q(s)f2(s))ds,
(6.3)
Zdyskretyzowane równanie (6.2.5) wyglaιda nasteιpujaιco:
Mα =N∑i=1
hi[J∑j=1
hjKijfj − ui]2 + α[J∑j=1
hjf2j +
J∑j=1
(fj+1 − fj
h)2hj ], (6.3)

60 6 Algorytm aproksymacji całkowej, metoda regularyzacji Tikhonowa
Zdyskretyzowany funkcjona l minimalizujemy poprzez zrózniczkowanie wzgleιdemfj i przyrównanie wyniku do 0. Otrzymujemy :
N∑i=1
J∑j=1
hihjKijKikfj −N∑i=1
hiKikui + α(fk+1 − 2fk + fk−1
h2 − fk) = 0, (6.3)
Po przejściu z reprezentacji dyskretyzacji do macierzowej i za lożeniu żep(s) = 1 oraz q(s) = 1 , funkcjona l wyglaιda nasteιpujaιco:
KTKhihjf −KThi + αCf = 0, (6.3)
Image5.jpg
Rysunek 6.1. Metoda Gaussa, albo α = 0.
Metodaι Gaussa nie da sieι rozwiaιzac tego zagadnienia odwrotnego.Metodaι regularyzacji Tikhonova w przypadku nieciągłej funkcji żródła.
Image2.jpg
Rysunek 6.2. Metoda Gaussa-Tikhonova, albo α = 0.0000177064.
Metodaι regularyzacji Tikhonova w przypadku ciągłej funkcji żródła. Wobu przypadkach α dobiera się za pomocą minimalizacji funkcjonała Gaussa.
Image4.jpg
Rysunek 6.3. Metoda Gaussa-Tikhonova, gładka funkcja żródła α =0.00001978940.

Literatura
1. Sabatier, Pierre C.(F-MONT2-PT) Nonuniqueness in inverse problems. (En-glish. English summary) J. Inverse Ill-Posed Probl. 4 (1996), no. 4, 307–316.
2. Tarantola, Albert, Inverse Problem Theory and Methods for Model ParameterEstimation, Society for Industrial and Applied Mathematics, Philadelphia, 2005.
3. Dębski W. Metody inwersyjne w [email protected] www.igf.edu.pl ebski
4. Lavrentjev, M.M. Romanov, V.G., Shyshatski S.P, Ill-posed problems of Ma-thematical physics and analysis, M., Nauka, 1980.
5. Tikhonov, A. N. Goncharskij A. V. -editors Ill-posed Problems in Natural Scien-ces Mir Publishers, Moscow, 1987.
6. Tikhonov, A. N.; Samarskiı, A. A. Equations of mathematical physics. Trans-lated from the Russian by A. R. M. Robson and P. Basu. Reprint of the 1963translation. Dover Publications, Inc., New York, 1990.
7. Tikhonov, A. N.; Goncharsky, A. V.; Stepanov, V. V.; Yagola, A. G. Numericalmethods for the solution of ill-posed problems. Translated from the 1990 Russianoriginal by R. A. M. Hoksbergen and revised by the authors. Mathematics andits Applications, 328. Kluwer Academic Publishers Group, Dordrecht, 1995.
8. Curtis R. Vogel Computational methods for inverse problems, Volume 10, SIAM,2002.
9. Sabatier, Pierre C. Three-dimensional impedance scattering theory. Electroma-gnetic and acoustic scattering: detection and inverse problem (Marseille, 1988),245–274, World Sci. Publishing, Teaneck, NJ, 1989.
10. Tikhonov A.N. Arsenin V.Ya., Rubashov I.B. Timonov A.A. DAN SSSR, v 263,872 919820
11. Tikhonov A.N. Arsenin V.Ya., Rubashov I.B. Timonov A.A. Priroda v 4, 11,(1984).
12. Tikhonov A.N. Arsenin V.Ya.,Timonov A.A. Matematiczeskie zadachi kompju-tornoj tomografii M. Nauka 1987.
13. Vladimir Romanov, Inverse problems of mathematical physics, VNU sciencePress Utrecht, Netherland, 1987.
14.15. Ivanov V.K. On ill-posed prob;ems. Mat. sb., 1963, bf 61 (103), n2, p.211-223.16. A.Piskorek, Równania całkowe Elementy teorii i zastosowania, WNT, Warszawa
1997

62 Literatura
17. A.N.Tikhonov, A.V.Goncharsky, III-Posed problems in the natural sciences,MIR Publishers, Moskwa 1987
18. V.S.Sizikov,Mathematical methods for processing of measurements results, BY3,Sankt-Petersburg 2001
19. A.D. Poularikas, The Handbook of Formulas and Tables for Signal Processing,CRC Press, USA 1999
20. Ivanov V.A. Wizja wewnętrzna (NMR tomografja) Znanie. 1989.21. V. A. Kotelnikov, Ón the carrying capacity of the ether and wire in telecommu-
nications”, Material for the First All-Union Conference on Questions of Com-munication, Izd. Red. Upr. Svyazi RKKA, Moscow, 1933 (Russian). (englishtranslation, PDF - Wiki.
22. H. Nyquist, “Certain factors affecting telegraph speed,” Bell Syst. Tech. J.,vol. 3, p. 324, Apr. 1924. R. V. L. Hartley, “The transmission of information,”Bell Syst. Tech. J., vol. 3, p. 535–564, July 1928.C. Shannon, PROCEEDINGSOF THE IRE, vol. 37, no. 1, pp. 10–21, Jan. 1949. Publisher Item Identifier S0018-9219(98)01299-7.
23. M. Efgrafov, Analiticheskie funkcii (Funkcje analityczne) Nauka, Moskva 1965.24. Marko D. Petković,Predrag S. Stanimirović, Milan B. Tasić. Effective partitio-
ning method for computing weighted Moore-Penrose inverse, Computers andMathematics with Applications archive Volume 55 , Issue 8 (April 2008) Pages1720-1734
25. Boris N. Zakhariev, Vladimir Chabanov Submissive Quantum Mechanics: NewStatus of the Theory in Inverse Problem Approach. Amazon,2007.quant-ph 207074 Obedient quantum mechanics: New status of the theory in theinverse problem approach. B. N. Zakhariev, V. M. Chabanov. physics.quant-ph.
26. T. Morawski, W. Gwarek, Pola i fale elektromagnetyczne, WNT, Warszawa1998.
27. J. Wesson, Tokamaks, 3rd edition, Oxford University Press 2004. Moskva 1955.28. S. Leble Rownania różniczkowe i cząstkowe w fizyce i technice. Skrypt, strona
domowa.

7
Załącznuk 1. Uwagi matematyczne
7.1 Uwagi matematyczne.
7.1.1 Podstawowe pojęcza [4]
Rozważmy przesrzeń Banacha X 3 x, która jest obszarem definicji ciągłegooperatora A:
Ax = f ∈ F, (7.0)
gzie F jest też prezetrzeń Banacha.Def. Zagadnenie dotyczące do (7.1.1) nazywa się dobrze uwarunkowanym
(well-posed - classic ), jeśli
1. dla każdego f ∈ F istnieje rozwiązanie (7.1.1) x ∈ X;2. rozwiązanie (7.1.1) jednoznazcznie się definuje f ;3. x zależy ciągle od prawej strony: małym (w metrykie F) zmianom f od-
powiada małe zmiany x (w X).
Wystarczy żeby istnieł ciagły operator B = A−1.Def. Zagadnenie (7.1.1) nazywa się jednostajnie (równomiernie) dobrze
uwarunkowanym jeśli wzmocnimy trzeczy warunek
1. dla każdego f ∈ F istneje rozwiązanie (7.1.1) x ∈ X2. rozwiązanie (7.1.1) jednoznzczne3. x zależy ciągle jednostajnie od prawej strony.
Zacytujmy:
Def.* Operator X → F jest zwartym jeśli obraz każdej sfery jest zwarty.A topological space X is compact if every open cover of it has a finitesubcover. In other words, if X is the union of a family of open sets, thereis a finite subfamily whose union is X.A subset of a topological space which is compact with respect to the relativetopology.http:/mathworld.wolfram.comĆompactSet.html

64 7 Załącznuk 1. Uwagi matematyczne
Wiki: Def.* A set is compact if every sequence in the set has a convergentsubsequence, the limit point of which belongs to the set.In functional analysis, a compact operator (or completely continuous opera-tor) is a linear operator L from a Banach space X to another Banach spaceY, such that the image under L of any bounded subset of X is a (relatively)compact subset of Y.http:/mathworld.wolfram.comĆompactSpace.html
Def. Operator A nazywa sie operatorem pierwszego rodziaju, jeśli operatorA jest zwarty (completely continuous) (jednostajnie ciągłym ?)∗ i żadna sferaw X nie jest zwarta.
Przykład równania pierwszego rodzaju - równanie całkowe Fredholma I-gorodzaju z ciągłym jądrem K(x, s) na [a, b],
Kφ ≡∫ b
a
K(x, s)φ(s)ds = f(x), (7.0)
Dowod: Przestrzeń Banacha definiuje się przez ||φ|| = maxs |φ(s)|, funkcjaK(x,s) jest ograniczoną |K(x, s)| ¬M
1) Niech dla każdego δ > 0, |φ1(s)−φ2| ¬ δ ||f1−f2|| ¬∫ ba|K(x, s)||φ1(s)−
φ2|ds ¬M(b− a)δ ., więc operator K jest ciągłym jednostajnie;2) sfera w X ||φ|| ¬ R patrz też [28]Stw Zagadnenie uzyskania rozwiązania równania (7.1.1) dla operatora
pierwszego rodziaju nie może być dobrze uwarunkowanym, bo operator od-wrotny do zwartego (jednostajnie ciągłego) nie jest ciągłym.
Dowod Nech X0 ∈ X jest sferą. Z ciagłosci jednostajniej wynika że zbiórF0 = A(X0) jest zwarty. Wędług definicji X0 nie jest zwartym więc istniejeciąg xk
a) który nie jest zbieżnym do żadnego elementu X0,b) ciąg fk = A(xk) jest zbieżnym: limk→∞ = f0.Stąd wynika że operator B = A−1 ne jest ciągłym na f0.Def Nech w przestrzeni X istnieje podprzestrzeń Y ⊂ X i, jeśli
a priori wiadomo że rozwiązanie X istnieje dla x ∈ Y rozwiązanie jednoznaczne nieskonczono małym zmianom f takich że x ∈ Y odpowiada nieskonczono
małe zmiany x.
Zagadnienie (7.1.1) nazywa się dobrze uwarunkowanym wędług TikhonowaPodprzestrzeń Y nazywa się zbiórem korektności.Jeśli podprzestrzeń Y jest zwarta, to ważnym jestTwierdzenie Tikhonowa Niech rozwiązanie (7.1.1) jest jednoznaczne,
Y jest zwarta i YA ⊂ F - obraz Y przy odwzorawaniu A, wtedy operatorodwrotny do A: B = A−1 jest ciagły jednostajnie.
Dowod Załózmy zalożenie stwierdzenia jest blędne, wtedy istnieje ε0 > 0takie że dla dowolnego δ znajdą się takie x1,2 ∈ Y że

7.1 Uwagi matematyczne. 65
ρX(x1, x2) > ε; ρF (A(x1), A(x2) < δ. (7.0)
Niech δk - ciąg, który dąży do zera przy k → ∞, xk1, xk2 - ciągi ele-mentów Y .
ρX(xk1, xk2) > ε; ρF (A(xk1), A(xk2) < δk). (7.0)
Y jest zbiórem zwartym - więc są podciągi xkj zbieżny w Y .Dalej, załóżmy
x1 = limk→∞
xk1; x2 = limk→∞
= xk2. (7.0)
Wtedy, na wskutek ciąglosci operatora A,
ρX(x1, x2) ε; ρF (A(x1), A(x2)) = 0. (7.0)
Stąd wynika że A(x1) = A(x2), co jest sprzecznie z założeniem twierdzenia ojednoznacznym rozwiązaniu równania (7.1.1).
Ważnym następnym krokiem do rzeczywistych zastosowań jest uwzględ-nienie błędów pomiarowych. Z tym jest związane pojęcze kwazirozwiązania(V. Ivanov [15]).
Niech prawa strona równania (7.1.1), fε jest znana z błedem ε. Zaznaczmydokładną funkcję literką fT , odpowiednią - dokładne rozwiązanie - jako xt:Axt = fT , wtedy
ρF (fT , fε) ¬ ε. (7.0)
Niech zagadnienie dla (7.1.1) zostało sformulowane dobrze uwarunkowane(korektnie) według Tikhonova. Kwazirozwiązaniem wtedy nazywa się elementx ∈ Y taki że wartość funkcjonała ρF (A(y), f) jest minimalna na Y .
ρF (A(x), f) = infy∈Y
ρF (A(y), f) (7.0)
Jeżeli Y jest zwarty, kwazirozwiązanie zawsze istneje.Dalej, rozważmy kwazirozwiązanie x takie że jest spełniony warunek
(7.1.1) wtedyρF (A(x), fε) = inf
y∈YρF (A(y), fε). (7.0)
Z nierównosci trojkonta i definicji kwazirozwiązania wynika
ρF (A(x), fT ) ¬ 2ε, (7.0)
zkąd, z kolei, mamy ciąglość zależnosci kwazirozwiązania od prawej strony(7.1.1), co oznacza
ρX(x, xT ) ¬ ω(2ε) ≡ supxj∈Y
ρX(x1, x2), ρF (A(x1), A(x2)) ¬ ε, (7.0)
co pozwala na ocenę, lecz kwazirozwiązanie jest rozwiązaniem przybliżonymz kontrolowanymi błędami.

66 7 Załącznuk 1. Uwagi matematyczne
7.1.2 Regularyzacja
Rozważmy przesrzeń Banacha X 3 x, oraz F 3 f . Nech, dalej rownanie
Ax = f (7.0)
modeluje pewne pomiary za pomocu operatora A.Def 1. Operator R(f, α) nazywa sie regularyzającym (operatorem regu-
laryzacji) w otoczeniu elementu fT = A(xT ) jeżeli dla dowolnych wartosciparametru skalarnego α i f ∈ F , które spelnia warunki
1) istnieje α0, δ0 taki że 0 < α < α0, ρ(f, fT ) < δ02) istneje funkcja α(δ) taka że dla dolwolnego ε > 0 znajdzie się δ(ε) < δ0
takie że if ρ(f, fT ) < δ(ε), wtedy ρ(xα, xT ) < ε, gdzie xα = R(f, α(δ)). αnazywa się parametrem regularyzacji.
Def 2. Operator R(f, α(δ)) nazywa się regularyzującym (operatorem regu-laryzacji) dla rownania (7.1.2) w F1 ⊂ F jeśli on jest operatorem regularyzacjiw otoczeniu kazdego elementu F1. Podkreślimy ze F1 ⊂ XA, gdzie X0 - zbiorwartości operatora.
Rozważmy teraz zagadnienie uzyskania przyblizonego rozwiązaia (7.1.2)po elementu fδ prawej strony (7.1.2) z dokladnosciu
ρ(fT , fδ) < δ.
Zalóżmy udało się zbudować operator R w otoczeniu fT . Z definicji operatoraregularyzacji wynika ze przy δ < δ0 mozna brać wartości operatora na ele-mencie fδ jako rozwiązanie przybliżone przy wartosci α odpowiedniej ocenieδ. Przy rozwiązywaniu konkretnego równania (7.1.2), które modeluje pewenproces (opis).
Dwa przypadki są możliwe.
I. If ε - oszacowanie błędu dopuszczalnego przy rozwiązaniu równania.Wtedu - problem w uzyskaniu δ(ε)- wymaganej dokładnoisci pomiarów prawejczęsci i parametra regularyzacji α(δ).
II. Dokladnosc pomiarów δ jeat jako podana. Problem jest w uzyskaniuwartosci parametra regularyzacji (α) dla któregobłąd w rozwiazaniu jest mi-nimalny.
Def. 3 Operator R(f, α) nazywa się regularyzającym jednostajnie dla rów-nania (7.1.2), na zbiorze F1, jeśli 1) istnieją takie liczby α0, δ0, że operator
R(f, α) jest zdefiniowany dla dowolnych α, f, fT dla ktorych spelnione są wa-runki 0 < α < α0, ρF (f, fT ) < δ0, fT ∈ F1. 2) istneje funkcja α(δ) taka że dla
dowolnego ε > 0 znajdie się δ(ε) < δ0 takie że
Dostateczny warunek tego że by operator był regularyzającym dlarównania.
Twierdzenie 1 Niech operator G(f, α), F → X spełnia warunki

7.1 Uwagi matematyczne. 67
1) Opeator G jst zdefiniowany na dowolnych α, f :
0 < α < α0, ρ(fT , f) < δ0
.
2) jest ciągly na fT , limα→0, G(fT , α) = xT .
10 Wtedy operatoe G jest regularyzatorem dla (7.1.2) w otoczeniu ele-menta fT . 20 Jeśli 1),2) spelnione są dla każdego fT ∈ F1, G jest regularyza-
jącym na F1. 30 Jesli operator G dla dowolnego α jest ciąglym jednostajnie i
G(A(x), α) jest regularyzającym
Dowod Nierownosc trojkonta
ρ(G(f, α), xT ) ¬ ρ(xTα, G(f, α)) + ρ(xTα, xT ),
gdzhiexTα = G(fT , α).
Zaznaczmyρ(f, fT ) = δ.
Z ciąglosci G przy α > 0 wynika
ρ(xTα, G(f, α) ¬ β(δ, α, fT ), (7.0)
limδ→0
β(δ, α, fT ) = 0
. mozna rozważac β jako monotniczną funkcje δ.Rozważmy dowolnie małe ε > 0. Na mocy drugiej wlasnosci (7.1.2) istneje
α(ε) takie że dla dowolnego α < α(ε) spelniona nierownosc: ρ(xTα, xT ) < ε.Zatem, ρ(xT , G(f, α)) < ε. Drugie jest skutkiem pierwszego. Niech, teraz Gjet jednostajnie ciagly i zbieznosc G(A(x), α) do x jest jednostajna na X1.Wtedy moąna liczyć że funkcja po prawej stronie (7.1.2) nie zalezy od fT inF1: β(δ, α, fT ) = β(δ, α), i nierownosci ρ(xT , xTα) < ε, ρ(xTα, g(f, α)) < εmaja mejsce przy α < α(ε) dla dowolnych xT ∈ X1, ρ(f, fT ) < δ(α), cooznacza sprwiedliwosc 30.
Oczywyszcze dla jednego rownania (ref) istneje neskonczona ilosc opera-torow regularyzajacych (RO). W przypadkach konkretnych wybor RO zalezyod celi budowy aproximacji po danym z bledami, prostota z punktu widzeniaagorytmow numerycznych.

68 7 Załącznuk 1. Uwagi matematyczne
7.1.3 Liniowe zle uwarunkowane zagadnienia.
Teoria patrz []1. Niech X,F - przestrzeni Banacha. A - ciagly liniowy operator X rightar-
row F. Rozwazmy liniowe rownanie
Ax = f. (7.0)
Dopuscmy (7.1.3) rozwiazuje się jednoznacznie i.e. operaor odwrotny do A,mianowicze A−1 istneje na XAnF , zbiorze
Niech rozwiązanie (7.1.2) jest jednoznaczne ,Y=Y’+Y” jest sumą prostą(algebraiczną), gdzie Y’ jest zwartym, ale Y” jest przestrzenią skończone wy-miarową. Wtedy na zbiórze YA wartosci Ax, x ∈ Y , operator A−1 jest jedno-stajnie ciaglym.
Dowód Niech stwierdzenie nie jest prawidłowym. Wtedy istneją podciągix′jk ∈ Y ′, x′′jk ∈ Y ′′, δk, j = 1, 2; k = 1,∞ i liczba ε > 0 taki że
||x′1k − x′2k + x′′1k − x′′2k|| < ε
,
δk
lim δk = 0.
Wsrod mozliwych funkcjonalow mozna wydzielic podklas zwiazanych zesturture liniowa tych przestrzeni
Niech X− jest przestrzenią Banacha zwarte włożoną i wszedzie gęstą wX. Funkcjonal φ(x) = γ(||x||X) gdzie γ - funkcja z T∞ będzie oczywisciestabilizującym. Jeśli F, X i funkcje γ(t), γ(t) ∈ T∞ sczisle wypukłe.
W teorii zagadnień korektnych po Tikhonowu podprzestrzen X czesto za-daje sie nastepujaco X = x : x = Bx1x1 ∈ X1 gdzie B - operator zu-pełnie ciagly X1− > X. W przypadku, gdyX,X1, F sa przestrzeni Hilberta,wtedy element minimalizujacy wygladzajacy funkcjonal znajduja sie w po-staci jawnej. Rozwazmy wiec funkcjonal wygladzajacy typu () dla () wyberajaγ(t) = γ(t) = t2 = ψ(x, α) = (Ax − f,Ax − f)F + α(B−1x,B−1x)X1 . Ele-ment x1 na ktorym funkcjonal osiąaga minimum jest rozwiazaniem rownaniaEulera.
(AB)∗(ABx1 − f) + αx1 = 0, (7.0)
więc,x1 = [αE + (AB) ∗AB]−1(AB) ∗ f
x = Bx1 = B[αE + (AB) ∗AB]−1(AB) ∗ f. (7.0)
na mocy Tw 4 (??) związku pomięzy kwazirozwiązaniem i operatorami regu-laryzacj dla zbiórow korektnosci wędług relacji Y a = x : x = Bx1, ||x1|| ¬ akwazirozwiązanie buduje się po (7.1.3) przy określionej wartości parametraα = α. Liczba α znajduje się z relacij

7.1 Uwagi matematyczne. 69
Def. 1 Rodzina operatorow Rα, 0 < α < α0 z F w X nazywa się regulary-zującej rownanie () na Z if
1) dla dowolnego αRα jest zdefiniowanym operatorem i ograniczonym2) dla dowolnego x ∈ Z; limα→0RαAx = x.jeśli zbieżność w 2 jest jednostajna na Z, Rα nazywa się jednostajnym
operatorem regularyzacji (regularyzającym jednostajnie).Z nazywa sie zbiórem regularyzacji (jednostajnej) rownania (7.1.3) dla
rodziny Rα. Zawsze jest liniowa podprzestrzeniu X.Rodzina Rn nazywa się rodziną operatorów reg. if
1) dla ∀n > 0D(Rα) = F i ||Rα|| <∞2) dla ∀x ∈ Z, limn→∞RαAx = xRozwazmy problem budowy rozwązania przybliżonego po przybliżonym
danymNiech
AxT = fT , (7.0)
i mamy fε; |||fT − fε| ¬ ε.Zaznaczmy
xαε = Rαfε. (7.0)
Wprowadzmyβ(α) = sup
||RαAx− x||, (7.0)
wtedy||xαε − xT || ¬ ||Rα||ε+ β(α). (7.0)
Można zminimizowac prawą stronę wybierając α = α(ε).
||Rα||ε+ β(α) = infα||Rα||ε+ β(α). (7.0)
————Przykłady rodzin regularyzacji (3e metody)







