Download - Numerical analysis of nonlinear dynamics

Numerical analysis of nonlinear dynamics
Ricardo Alzate Ph.D. StudentUniversity of Naples FEDERICO II (SINCRO GROUP)

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 2/45
Outline
• Introduction• Branching behaviour in dynamical systems • Application and results

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 3/45
Introduction
R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 4/45
Study of dynamics
Elements for extracting dynamical features:
• Mathematical representation• Parameters and ranges• Convenient presentation of results (first insight)• Careful quantification and classification of phenomena
• Validation with real world

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 5/45
Dynamics overviewHow to predict more accurately dynamical features on system?
R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 6/45
References
Chronology:
[1]. Seydel R. “Practical bifurcation ans stability analysis: from equili-
brium to chaos”. 1994.
[2]. Beyn W. Champneys A. Doedel E. Govaerts W. Kutnetsov Y. and
Sandstede B. “Numerical continuation and computation of normal
forms”. 1999.
[3]. Doedel E. “Lecture notes on numerical analysis of bifurcation pro-
blems”. 1997.

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 7/45
References (2)
[4]. Keller H.B. “Numerical solution of bifurcation and nonlinear eigen-
value problems”. 1977.
[5]. MATCONT manual. 2006. and Kutnetsov Book Ch10.
[6]. LOCA (library of continuation algorithms) manual. 2002.

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 8/45
Why numerics?
Nonlinear systems
Dynamics
- complex behaviour
- closed form solutions not often available
- discontinuities !!!
Computational resources
- availability – technology
- robust/improved numerical methods

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 9/45
How numerics?
Brute force simulation
- heavy computational cost
- tracing of few branches and just stable cases
- jumps into different attractors (suddenly)
- affected by hysteresis, etc..
Continuation based algorithms
- a priori knowledge for some solution
- a priori knowledge for system interesting regimes

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 10/45
Numeric bugs
Hysteresis
Branch jump

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 11/45
Branching behaviour in dynamical systems

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 12/45
General statement
1 1
2 2
33
( ) ( ) ( )
( ) ( ) ( ) ( , )
( )( )
f
f
x t t x tequilibrium pts
x t t x t f xequilibrium orbits
x t tx t
In general, it is possible to study the dependence of dynamics (solutions) in terms of parameter variation (implicit function theorem).
0 1 2 2
sin( ) 0tan( )
( )cos( ) cos ( ) cos ( )fA
f A f Af f f
xdJ K x y d d d
t
R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 13/45
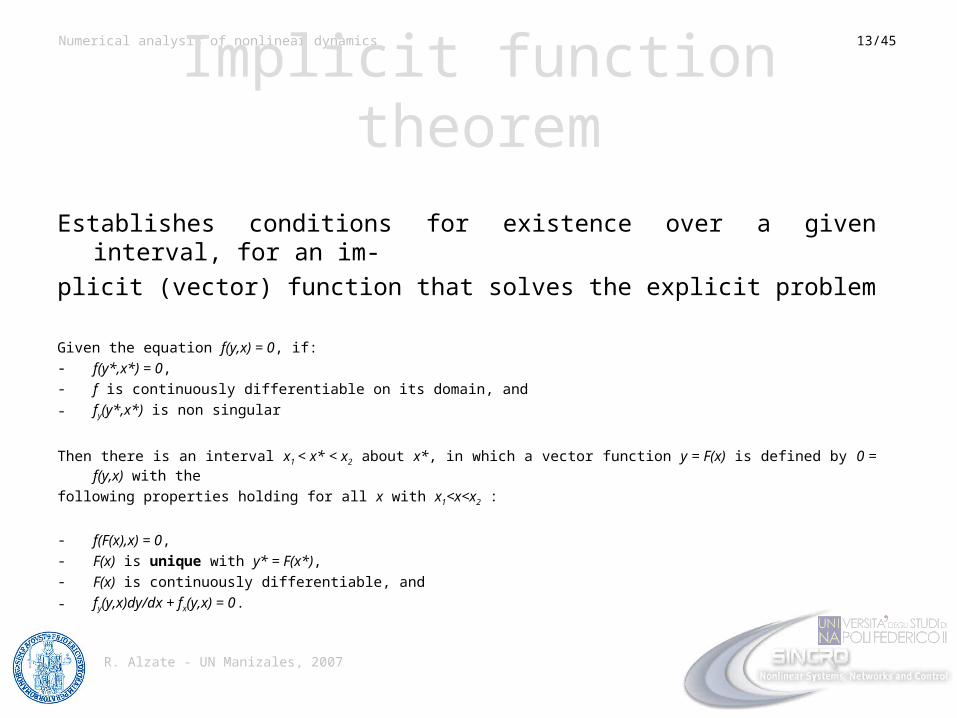
Implicit function theorem
Establishes conditions for existence over a given interval, for an im-
plicit (vector) function that solves the explicit problem
Given the equation f(y,x) = 0, if:- f(y*,x*) = 0,- f is continuously differentiable on its domain, and
- fy(y*,x*) is non singular
Then there is an interval x1 < x* < x2 about x*, in which a vector function y = F(x) is defined by 0 = f(y,x) with the
following properties holding for all x with x1<x<x2 :
- f(F(x),x) = 0,- F(x) is unique with y* = F(x*),- F(x) is continuously differentiable, and
- fy(y,x)dy/dx + fx(y,x) = 0 .

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 14/45
Implicit function theorem (2)
212 220 ( ( ), ) 1 1g f x x x x
12 2
1
12 2
2
( ) 1( )
( ) 1
f x xy f x
f x x
2 2 2 21 0 ( , ) 1x y g y x y x
Then, singularity condition on gy(f(x),x) excludes x = ±1 as part of function domain in order to apply the theorem.
2 2 ( )dg dg
J x f xdx dy

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 15/45
Branch tracing
( , ) ( , ) ( , )( , )
df y f y dy f yf y
d y d
The goal is to detect changes in dynamical features depending on parameter variation:
Then, by conditions of IFT:
Behaviour evolution as function of λ, not defined for singularities on fy(y,λ) (system having zero eigenvalues)
( , )( , )
0( , )
f ydf y dy
f ydy dy

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 16/45
Branch tracing (2)
In general, there are two main ending point type for a codimension-one branch namely turning points and single bifurcation points.
R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 17/45
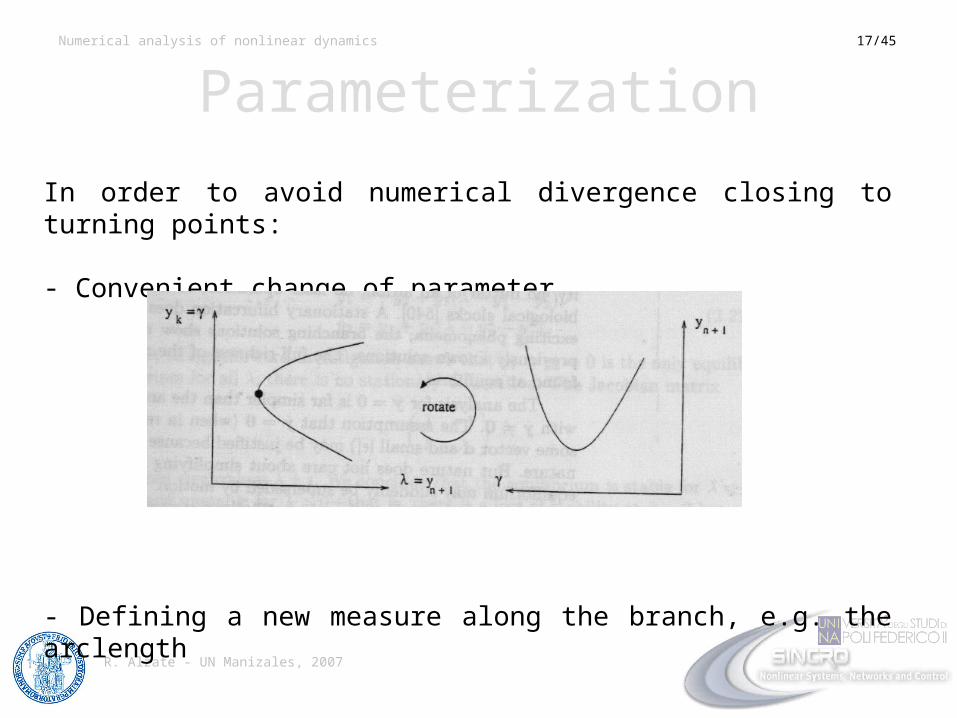
Parameterization
In order to avoid numerical divergence closing to turning points:
- Convenient change of parameter,
- Defining a new measure along the branch, e.g. the arclength
R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 18/45
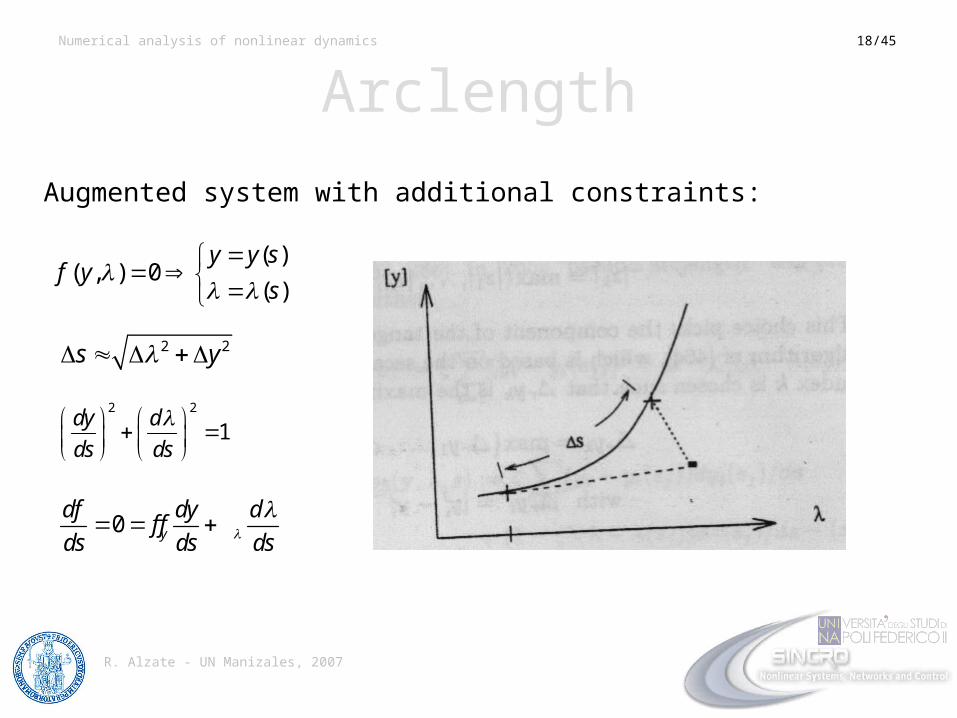
Arclength
2 2s y
( )( , ) 0
( )
y y sf y
s
0 y
df dy df f
ds ds ds
Augmented system with additional constraints:
2 2
1dy d
ds ds

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 19/45
Tangent predictor
Tangential projection of solution:
1j j j jy y h v
R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 20/45
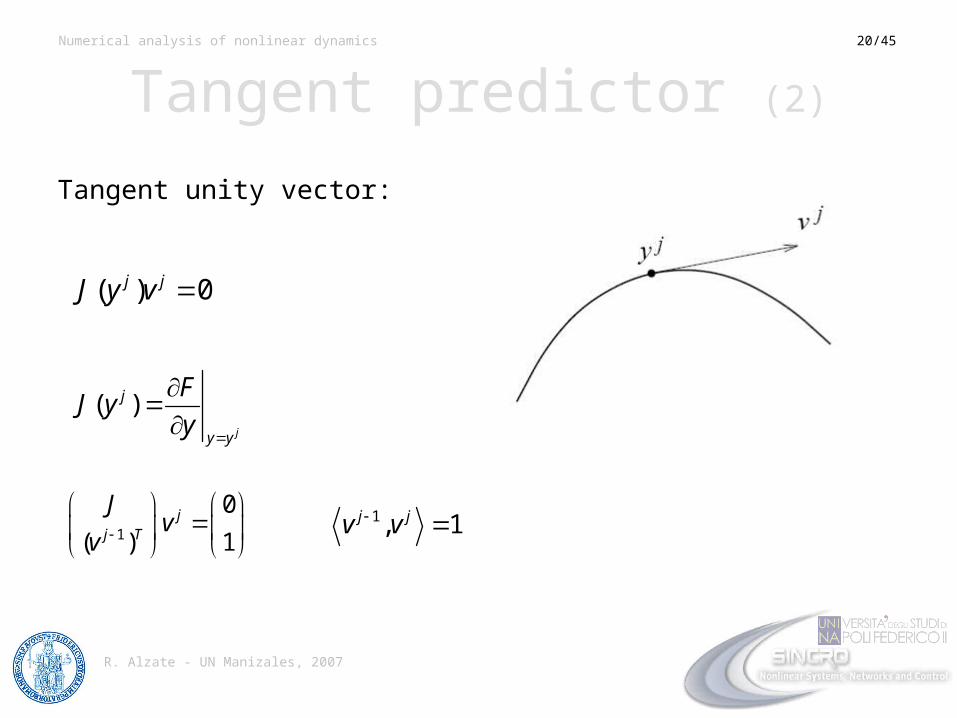
Tangent predictor (2)
Tangent unity vector:
( )j
j
y y
FJ y
y
( ) 0j jJ y v
1
0
( ) 1j
j T
Jv
v
1, 1j jv v

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 21/45
Root finding
0 0 0 0 0( ) ( ) . . . ( )y yf y dy f y f dy h o t f y f dy
00 0
0
( )0 ( ) y
y
f yf y f dy dy
f
Newton-Raphson method for location of equilibria:
11 0 1 2 1
1
( )( ) 0? ...
y
f yy y dy f y y y
f

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 22/45
Root finding (2)
1 1 1
1 1
( )( , ) ( )
j j jY
j j j
f dY f Yf y f Y
Y Y dY
1( ) 1jYrank f n
In general:
i.e. nonsingularity of Jacobian at solution
Allowing implementation of method.
11
( )
( )j
j
f YF
g Y
R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 23/45
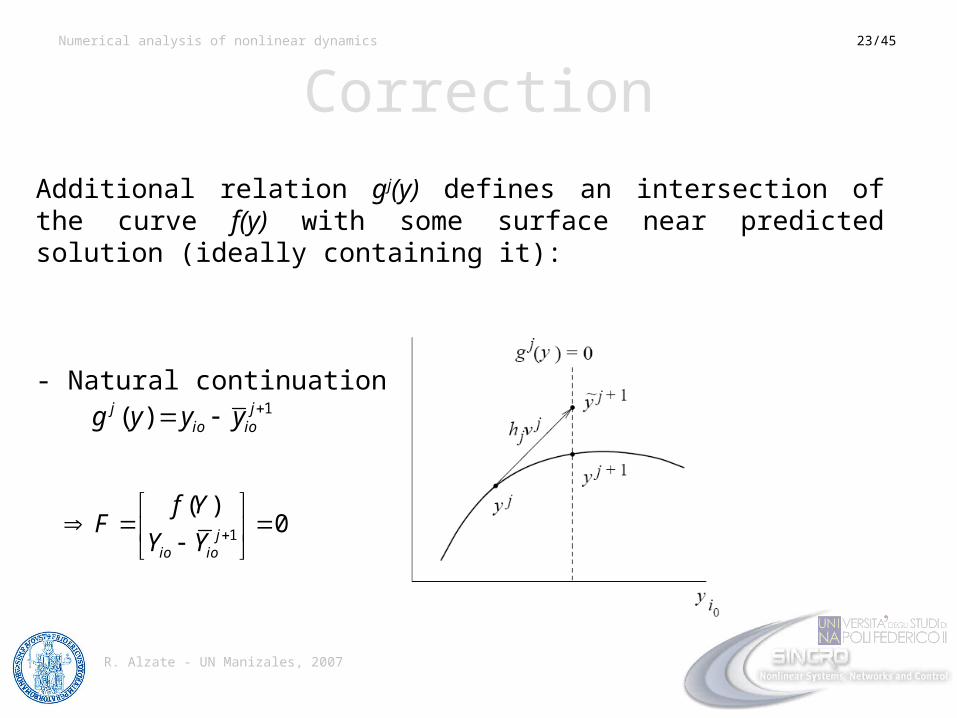
Correction
1
( )0j
io io
f YF
Y Y
Additional relation gj(y) defines an intersection of the curve f(y) with some surface near predicted solution (ideally containing it):
- Natural continuation:
1( )j jio iog y y y

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 24/45
Correction (2)
1( ) ,j j jg y y y v
- Pseudo-arclength continuation:
R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 25/45
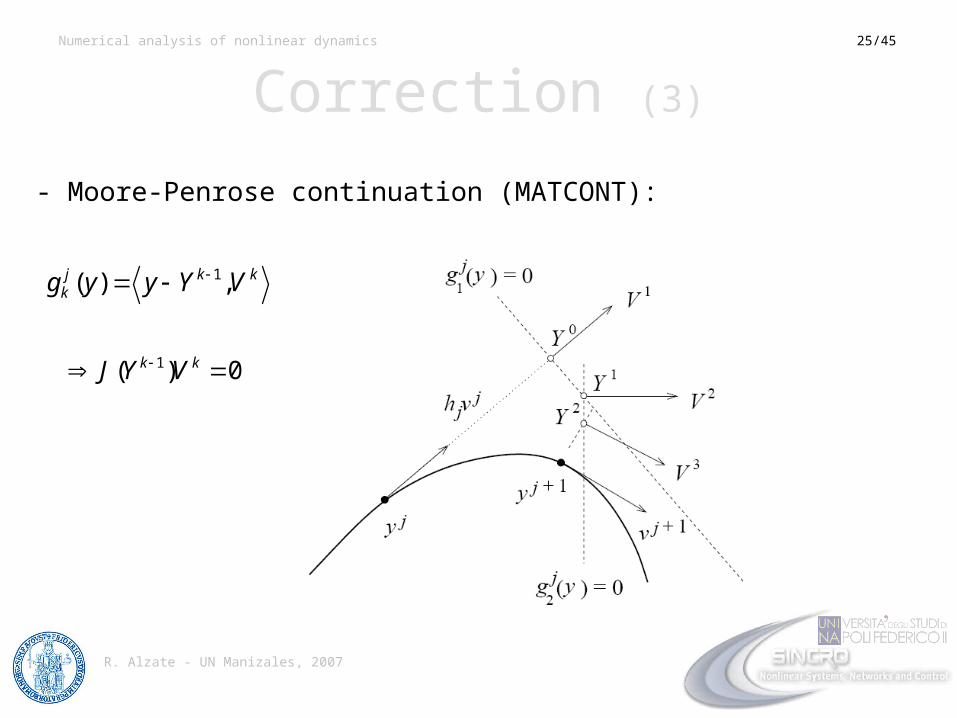
Correction (3)
1( ) ,j k kkg y y Y V
- Moore-Penrose continuation (MATCONT):
1( ) 0k kJ Y V

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 26/45
Moore-Penrose
1( 1)1 xx
T Tn nn n
A A A AA
1 0 0 0 0 0Y YY Y Y Yf f Y Y f f Y
Pseudo-inverse matrix:
1 0 0 0 0
1xY Y n n
Y Y f f Y f

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 27/45
Step size control
Basic and effective approach (there are many !!!):
- Step size decreasing and correction repeat if non converging
- Slightly increase for step size if quick conversion
- Keep step size if iterations are moderated

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 28/45
Test functionsDetection of stability changes between continued solutions:
- In general are developed as smooth functions zero valued at bifurcations, i.e.
0 0 1 1( , ) 0 ( , ) ( , ) 0j j j jy y y
R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 29/45
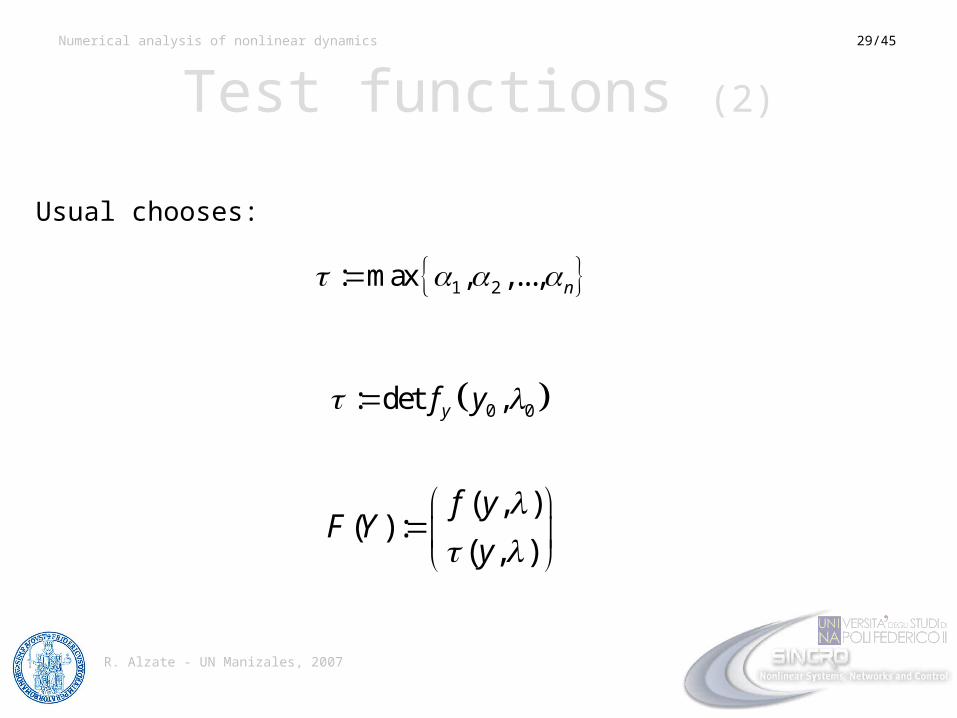
Test functions (2)
1 2: max , ,..., n
0 0: det ,yf y
Usual chooses:
( , )( ) :
( , )
f yF Y
y

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 30/45
Branch switching
When there is a single bifurcation point, there are more than one trajectories for the which (y0,λ0) is an equilibrium:

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 31/45
Branch switching (2)
0 0, 0 0y
df dy df y s s f f
ds ds ds
0
0 1 0
y
y
v range fdyv h
ds h null f
0
2 2 0 01 1 0 0
0 0 0
0
:
2 0 :
: 2
Tyy
Tyy y
Tyy y
y
a f hh
a b c b f v f h
c f vv f v f
null range f
How to track such new trajectory?
- Algebraic branching equation (Keller 1977 !!!)2 0b ac

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 32/45
An algorithm

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 33/45
Application and results
R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 34/45
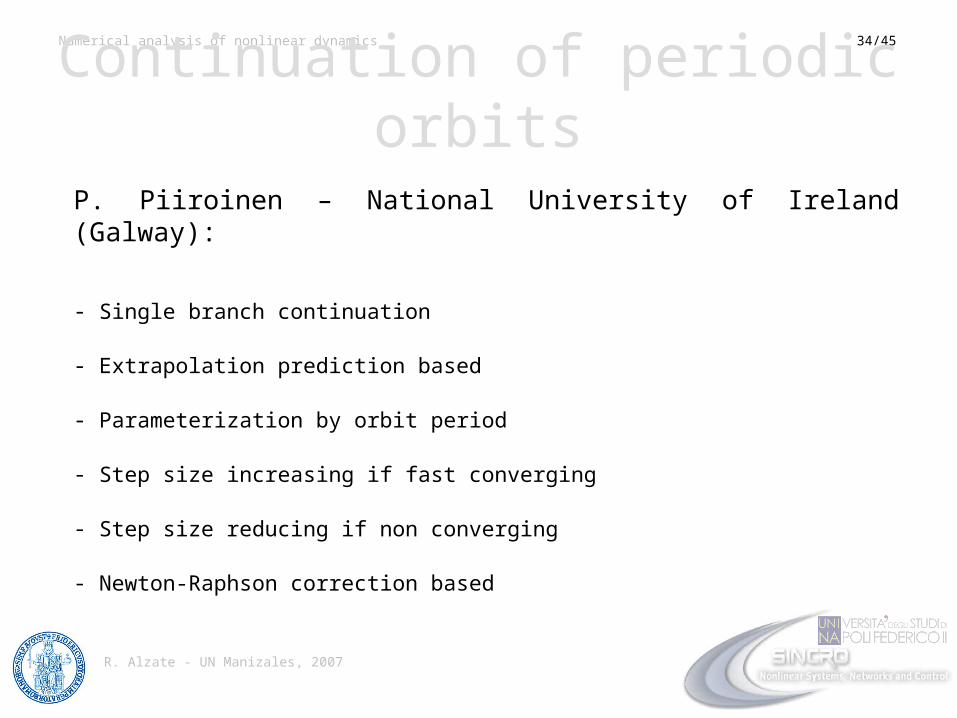
Continuation of periodic orbits
P. Piiroinen – National University of Ireland (Galway):
- Single branch continuation
- Extrapolation prediction based
- Parameterization by orbit period
- Step size increasing if fast converging
- Step size reducing if non converging
- Newton-Raphson correction based

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 35/45
Continuation of periodic orbits (2)

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 36/45
Tracing a perioud-doubling

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 37/45
Eigenvalue evolution

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 38/45
On unit circle

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 39/45
Sudden chaotic window
R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 40/45
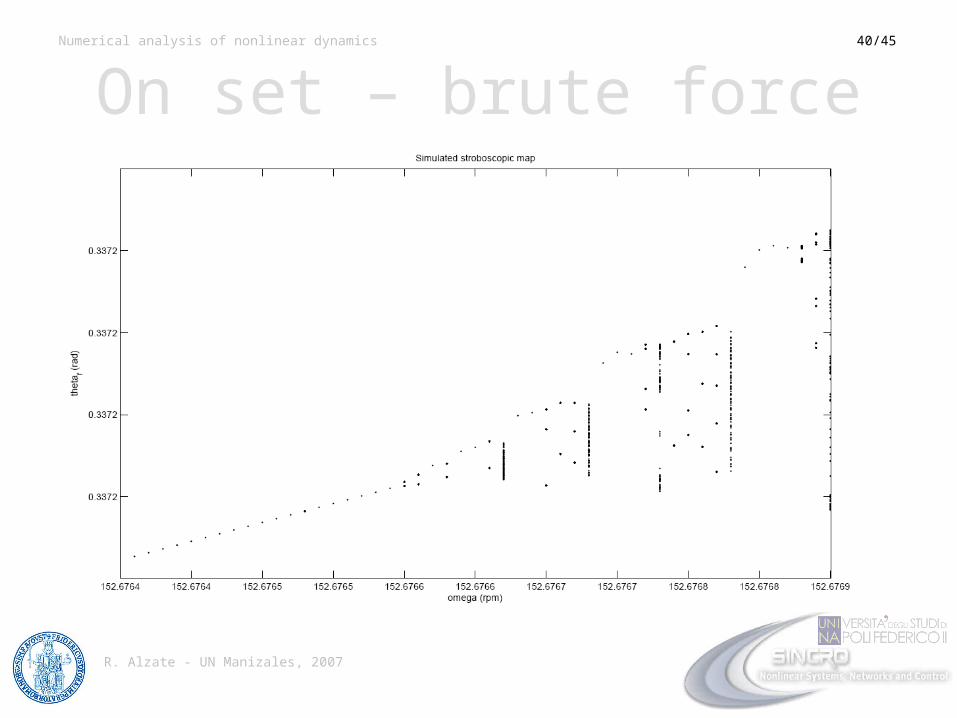
On set – brute force

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 41/45
On set – continued

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 42/45
Conjectures
How to explain such particularly regular cascade?
- development of local maps

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 43/45
Open tasks
- Improvement of numerical approximation for map
- Theoretical prediction (or validation): A. Nordmark (2003)
2 3 4( )p x a bx cx dx ex f x

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 44/45
Conclusion
A general description about numerical techniques for branching analysis of systems has been developed, with promising results for a particular application on the cam-follower impacting model.
By the way, is not possible to think about a standard or universal procedure given inherent singularities of systems, then researcher skills constitute a valuable feature for success purposes.

R. Alzate - UN Manizales, 2007
Numerical analysis of nonlinear dynamics 45/45
...?http://wpage.unina.it/r.alzate
Grazie e arrivederci !!!







