
Lecture 20:Shortest Paths
Shang-Hua Teng

Weighted Directed Graphs• Weight on edges for distance
JFK
BOS
MIA
ORD
LAXDFW
SFO
v2
v1v3
v4
v5
v6
v7
400
2500
1000
1800800900

Shortest Paths• Given a weighted, directed graph G=(V, E) with
weight function w: ER. The weight of path p=<v0, v1,..., vk> is the sum of the weights of its edges:
• We define the shortest-path weight from u to v by
• A shortest path from vertex u to vertex v is any path with w(p)=(u, v)
k
iii vvwpw
11 ),()(
}:)(min{
),(
vupw
vup
If there is a path from u to v,
Otherwise.

Variants of Shortest Path Problem• Single-source shortest paths problem
– Finds all the shortest path of vertices reachable from a single source vertex s
• Single-destination shortest-path problem– By reversing the direction of each edge in the graph, we can
reduce this problem to a single-source problem
• Single-pair shortest-path problem– No algorithm for this problem are known that run
asymptotically faster than the best single-source algorithm in the worst case
• All-pairs shortest-path problem

Relaxation• For each vertex vV, we maintain an
attribute d[v], which is an upper bound on the weight of a shortest path from source s to v. We call d[v] a shortest-path estimate.
Possible Predecessor of v in the shortest path

Relaxation
• Relaxing an edge (u, v) consists of testing whether we can improve the shortest path found so far by going through u and, if so, update d[v] and [v]
By Triangle Inequality

Dijkstra’s Algorithm
Coping with Negative Weights
• Deciding whether there is a negative circle
• If the graph does not have a negative circle reachable from the source s, for the shortest path tree.

Bellman-Ford Algorithm
BellmanFord() for each v V d[v] = ; d[s] = 0; for i=1 to |V|-1 for each edge (u,v) E Relax(u,v, w(u,v)); for each edge (u,v) E if (d[v] > d[u] + w(u,v)) return “no solution”;
Relax(u,v,w): if (d[v] > d[u]+w) then d[v]=d[u]+w
Initialize d[], whichwill converge to shortest-path value
Relaxation: Make |V|-1 passes, relaxing each edge
Test for solution Under what conditiondo we get a solution?

Bellman-Ford Algorithm
BellmanFord() for each v V d[v] = ; d[s] = 0; for i=1 to |V|-1 for each edge (u,v) E Relax(u,v, w(u,v)); for each edge (u,v) E if (d[v] > d[u] + w(u,v)) return “no solution”;
Relax(u,v,w): if (d[v] > d[u]+w) then d[v]=d[u]+w
What will be the running time?
Bellman-Ford Algorithm
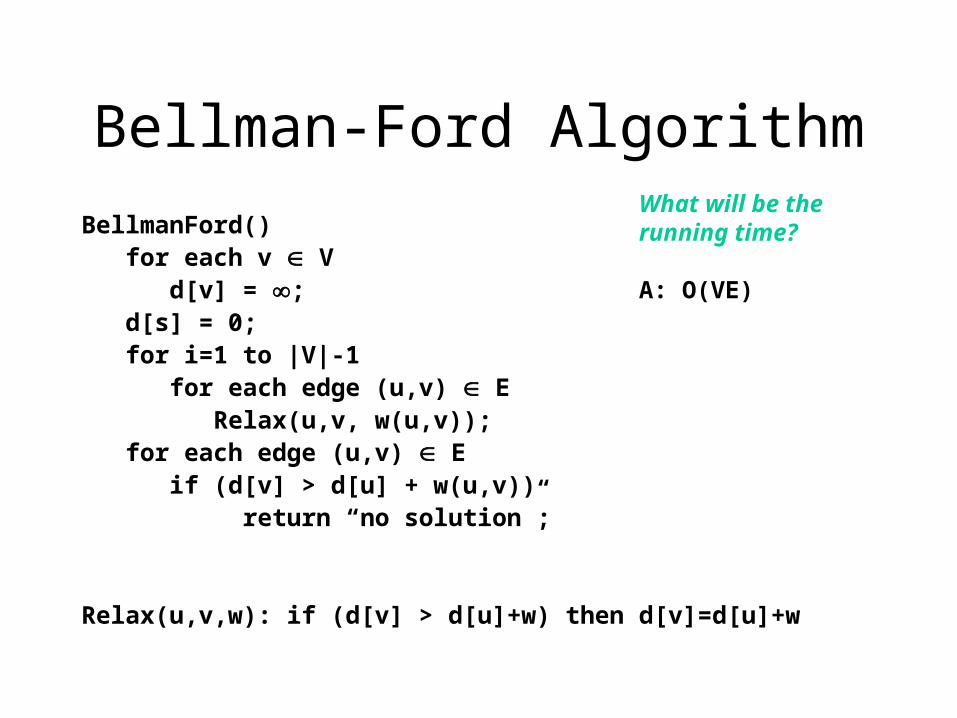
BellmanFord() for each v V d[v] = ; d[s] = 0; for i=1 to |V|-1 for each edge (u,v) E Relax(u,v, w(u,v)); for each edge (u,v) E if (d[v] > d[u] + w(u,v)) return “no solution”;
Relax(u,v,w): if (d[v] > d[u]+w) then d[v]=d[u]+w
What will be the running time?
A: O(VE)

Bellman-Ford Algorithm
BellmanFord() for each v V d[v] = ; d[s] = 0; for i=1 to |V|-1 for each edge (u,v) E Relax(u,v, w(u,v)); for each edge (u,v) E if (d[v] > d[u] + w(u,v)) return “no solution”;
Relax(u,v,w): if (d[v] > d[u]+w) then d[v]=d[u]+w
B
E
DC
A
-1 2
2
1-3
5
3
4
Ex: work on board
s

Bellman-Ford• Note that order in which edges are processed affects
how quickly it converges• Correctness: show d[v] = (s,v) after |V|-1 passes
– Lemma: d[v] (s,v) always• Initially true• Let v be first vertex for which d[v] < (s,v)• Let u be the vertex that caused d[v] to change:
d[v] = d[u] + w(u,v)• Then d[v] < (s,v)
(s,v) (s,u) + w(u,v) (Why?) (s,u) + w(u,v) d[u] + w(u,v) (Why?)
• So d[v] < d[u] + w(u,v). Contradiction.

Bellman-Ford
• Prove: after |V|-1 passes, all d values correct– Consider shortest path from s to v:
s v1 v2 v3 v4 v• Initially, d[s] = 0 is correct, and doesn’t change (Why?)
• After 1 pass through edges, d[v1] is correct (Why?) and doesn’t change
• After 2 passes, d[v2] is correct and doesn’t change
• …
• Terminates in |V| - 1 passes: (Why?)
• What if it doesn’t?

Properties of Shortest Paths
• Triangle inequality– For any edge (u,v) in E, (s,v) <= (s,u) + w(u,v)
• Upper bound property– d[v] >= (s,v)
• Monotonic property – d[v] never increase
• No-path property– If v is not reachable then d[v] = (s,v) = infty

Properties of Shortest Paths• Convergence property
– If (u,v) is on the shortest path from s to v and if d[u] = (s,u) at any time prior to relaxing (u,v), then d[v] = (s,v) at all time afterward
• Path-relaxation property– If p=< s=v0,v1, v2,..., vk> is the shortest path from s to vk
and edges of p are relaxed in order in the index, then d[vk] = (s, vk). This property holds regardless of any other relaxation steps that occur, even if they are intermixed with relaxations of the edges of p

Properties of Shortest Paths
• Predecessor-subgraph property– Once d[v] = (s,v), the predecessor subgraph is
a shortest-paths tree rooted at s

Matrix Basic
• Vector: array of numbers; unit vector
• Inner product, outer product, norm
• Matrix: rectangular table of numbers, square matrix; Matrix transpose
• All zero matrix and all one matrix
• Identity matrix
• 0-1 matrix, Boolean matrix, matrix of graphs

Matrix Operations
• Matrix-vector operation– System of linear equations– Eigenvalues and Eigenvectors
• Matrix matrix operations

1. Matrix Addition:
mnmnmm
nn
nn
mnmm
n
n
mnmm
n
n
baba
bababa
bababa
BA
bbb
bbb
bbb
B
a aa
a aa
a aa
A
,
,
11
2222222121
1112121111
21
22221
11211
21
22221
11211

2. Scalar Multiplication:
mnmm
n
n
mnmm
n
n
aaa
aaa
aaa
aaa
aaa
aaa
A
21
2 2221
11211
21
22221
11211
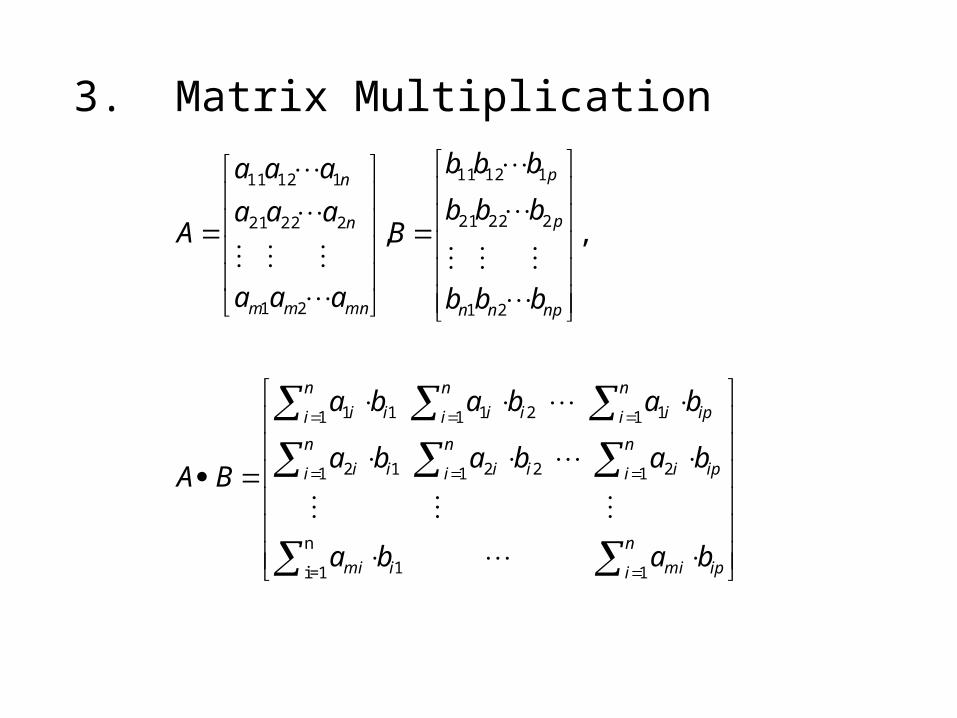
3. Matrix Multiplication
n
i ipmiimi
n
i ipi
n
i ii
n
i ii
n
i ipi
n
i ii
n
i ii
npnn
p
p
mnmm
n
n
baba
bababa
bababa
BA
bbb
bbb
bbb
B
aaa
aaa
aaa
A
1
n
1=i 1
1 21 221 12
1 11 211 11
21
22221
11211
21
22221
11211
,
,







