
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR
EPICICLOIDAL HUMPAGE, DERIVADO DEL
PROYECTO DE INVESTIGACIÓN SIP Nº 20070288
TESIS QUE PARA OBTENER EL TÍTULO DE
INGENIERO MECÁNICO
PRESENTA
DIANA RODRÍGUEZ ISLAS
ASESORES M. en C. ANTONIO CAMARENA GALLARDO
M. en C.© MARIO ANTONIO RAMÍREZ FLORES
2010


INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
3
DEDICATORIAS Son muchas las personas especiales a las que me gustaría agradecer su apoyo, ánimo y compañía, en las diferentes etapas de mi vida, sin importar dónde estén. Si alguna vez llegan a leer estas dedicatorias, quiero darles las gracias por formar parte de mí, por todo lo que me han brindado y por todas sus bendiciones.
Al más especial de todos: Iker. Aún no sabes leer, un día vas a aprender y por eso te dedico especialmente esta tesis a ti, hijo mío, para que te sirva como un ejemplo para que llegues más lejos que yo. Gracias mi bebé por alegrarme día a día con tus ruiditos chistosos y con esa pequeña sonrisa, donde apenas se asoman unos dientitos y que es lo más hermoso que he visto en mi vida; tú que me das el valor y la fuerza necesaria para lograr mis sueños y que me has enseñado el verdadero significado del amor. Te amo, nenuco.
Pepe, ¿adivina qué? ¡Te gane! Estoy muy orgullosa de ti, creo que no puede haber mejor compañero en mi vida que tú. Gracias por apoyarme en esto, por aquellas caminatas por toda la ciudad, por esos grandiosos días de rock y, principalmente, por darme lo más valioso que tengo en la vida. Te quiero mucho.
Mami, no me equivoco si digo que eres la mejor mamá del mundo; gracias por todo tu esfuerzo, tu apoyo y tu confianza que depositaste en mí, gracias por tu gran ejemplo de vida. Te quiero mucho.
Papá, este es un logro que quiero compartir contigo; gracias por ser mi papá y por creer en mí. Quiero que sepas que ocupas un lugar especial en mi vida y que te quiero mucho; esto es para ti, tú lo sabes.
Nax y Claudia, gracias por guiarme en cualquier momento y por todo lo que de ustedes he aprendido, en verdad son especiales para mí.
Ale, Atzy y Xime, espero que yo sea una buena influencia para ustedes y que aunque peques son ahora, se que serán un trío de triunfadoras en la vida; gracias por los momentos que hemos pasado juntas y porque siempre han estado conmigo, aunque sea sólo para dar lata. Las quiero mucho.
Toño, mi amigo y profesor consentido, gracias por todos los conocimientos que compartiste conmigo y por tu valioso tiempo dedicado a esta tesis, pero principalmente gracias por tu amistad y paciencia conmigo. Y principalmente a ti Señor, que hiciste realidad este sueño, por todo el amor con el que me rodeas y porque me tienes en tus manos.
Dianis

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
4
ÍNDICE
PÁGINA INTRODUCCIÓN…………………………………………………………………………. 6
OBJETIVOS………………………………………………………………………………. 7
JUSTIFICACIÓN………………………………………………………………………….. 7
ANTECEDENTES………………………………………………………………………… 8
CAPÍTULO 1: PROYECTO DE INVESTIGACIÓN
SIP Nº 20070288..…………………………………………………………. 9 1.1.- PROTOCOLO DE INVESTIGACIÓN……………………………………………. 10
1.2.- INTERRELACIÓN DEL PROYECTO CON LA TESIS………………………... 18
CAPÍTULO 2: MARCO TEÓRICO………………………………………... 19
2.1.- INTRODUCCIÓN A LOS TRENES DE ENGRANES………………………….. 20
2.1.1.- Historia y evolución………………………………………………………. 21
2.1.2.- Trenes de engranes……………………………………………………… 28
2.1.3.- Ley Fundamental del engranaje………………………………..………. 29
2.1.4.- Aplicaciones de los trenes de engranes………………………………. 32
2.2.- TIPOS DE ENGRANES…………………………………………………………… 34
2.2.1.- Rectos…………………………………………………………………….. 34
2.2.2.- Helicoidales……………………………………………………………….. 35
2.2.2.1.- De ejes Paralelos………………………………………………… 36
2.2.2.2.- De ejes cruzados…………………………………………………. 37
2.2.2.3.- Doble helicoidal…………………………………………………… 38
2.2.3.- Cónicos…………………………………………………………………….. 38
2.2.4.- Cónicos en espiral……………………………………………………….. 40
2.2.5.- Hipoidales…………………………………………………………………. 40

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
5
2.2.6.- Corona con tornillo sinfín………………………………………………… 40
2.3.- TRENES DE ENGRANES………………………………………………………… 41
2.3.1.- Tren Ordinario Simple……………………………………………………. 42
2.3.2.- Tren Ordinario Compuesto………………………………………………. 42
2.3.3.- Tren Epicicloidal…………………………………………………………… 43
2.4.- REDUCTORES DE VELOCIDAD…………………………………………………. 49
2.4.1.- Reductores de velocidad de Sin fin-Corona………………………….. 50
2.4.2.- Reductores de velocidad de engranajes………………………………...50
2.4.1.- Reductores de velocidad Planetarios…………………………..……….. 50
CAPÍTULO 3: REDUCTOR EPICICLOIDAL HUMPAGE………………. 51
3.1.- ELEMENTOS QUE LO COMPONEN…………………………………………….. 52
3.2.- TREN PLANETARIO PRIMARIO…………………………………………………. 54
3.3.- TREN PLANETARIO SECUNDARIO…………………………………………….. 54
3.4.- FUNCIONAMIENTO DEL HUMPAGE……………………………………………. 54
CAPÍTULO 4: CÁLCULO CINEMÁTICO DEL REDUCTOR…………… 56
4.1.- ANÁLISIS CINEMÁTICO DEL REDUCTOR HUMPAGE……………………… 57
4.1.1.- Velocidad teórica de salida………………………………………………. 57
4.1.2.- Propuesta del número de dientes……………………………………….. 61
4.1.3.- Velocidad de salida………………………………………………………... 62
4.1.4.- Relación de reducción…………………………………………………….. 63
4.2.- DISEÑO CINEMÁTICO DEL REDUCTOR HUMPAGE………………………… 63
4.2.1.- Planos de los eslabones…………………………………………………. 63
4.2.2.- Fotografías…………………………………………………………….…… 79
RESULTADOS Y CONCLUSIONES………………………….……………………….. 84
BIBLIOGRAFÍA…………………………………………………………………………… 86

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
6
INTRODUCCIÓN
El presente trabajo consiste en realizar el diseño, desde el punto de vista cinemático, de un tren de engranes planetario que es conocido como Reductor Humpage. Como lo indica el título de esta tesis, este trabajo se deriva de un Proyecto de Investigación registrado, en la Secretaría de Investigación y Posgrado del IPN, con el número 20070288.
Esta tesis se desarrolló en cuatro capítulos, los cuales, a grandes rasgos, tratan
de lo siguiente. En el Capítulo 1, Proyecto de Investigación SIP Nº 20070288, se expone el
protocolo de dicho proyecto y se indica la interrelación que hay entre dicho proyecto y el presente trabajo.
El Marco Teórico se presenta en el Capítulo 2. Se da una breve introducción al
tema, con algunos antecedentes históricos. Después se describen los diferentes tipos de engranes, así como los tipos de trenes de engranes. También se habla sobre los reductores de velocidad.
El Capítulo 3 se refiere al Reductor Epicicloidal Humpage; se indican los
elementos que lo integran y se describe su funcionamiento. En el Capítulo 4, Cálculo Cinemático del Reductor, se realiza el análisis de
velocidades del Humpage, se da una propuesta para el número de dientes de cada engrane y se calcula la relación de velocidades. Así mismo, aquí se presentan los planos de diseño de los elementos que componen este reductor. Cabe aquí indicar que dentro de los objetivos del Proyecto de Investigación estaba el desarrollar, físicamente, el Reductor Humpage, lo cual sí se desarrolló con base en los logros alcanzados con este trabajo. En este capítulo se incluyen fotografías del Reductor Humpage que se elaboró.
Finalmente se destacan los resultados alcanzados y se exponen las
conclusiones originadas por el desarrollo de este trabajo. La metodología empleada fue la siguiente. Primero se investigó y desarrolló la
Marco Teórico que fundamenta este trabajo. Después se analizó y describió el funcionamiento del Reductor Humpage, considerando el Marco Teórico. Con base en la teoría de la cinemática de los trenes planetarios y de la propuesta del número de dientes de los engranes, se realizó el diseño cinemático del reductor, o sea, el cálculo de la velocidad de salida del reductor. Por último, lo anterior nos llevó al diseño de las

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
7
partes del reductor, que sirvieron de base para la producción de un prototipo de dicho reductor.
OBJETIVOS
OBJETIVO GENERAL. Esta tesis tiene como Objetivo General realizar el diseño cinemático del tren
planetario conocido como Reductor Humpage. OBJETIVOS ESPECÍFICOS. Establecer la aplicación del cálculo de velocidades de un tren planetario,
para el caso particular del reductor Humpage. Hacer una propuesta para el número de dientes de cada engrane. Determinar la velocidad de salida y la relación de reducción del diseño
propuesto. Establecer el diseño de las partes que conforman el reductor Humpage.
JUSTIFICACIÓN
Dentro de la gran variedad de mecanismos que hay, los trenes de engranes son muy importantes por su amplia aplicación. De los diferentes tipos de trenes, los planetarios son interesantes por la versatilidad que presentan respecto a las variaciones de velocidad a que dan lugar. El caso del tren planetario Humpage, es de particular interés por la alta relación de reducción de velocidad que puede dar, que es del orden de 100. Por este motivo fue que en lo personal me atrajo el desarrollo de este trabajo.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
8
ANTECEDENTES
En escasos libros se hace mención del Reductor Humpage, y es mínimo el desarrollo que se presenta del mismo. Las principales ventajas del reductor Humpage son que es un mecanismo que ocupa poco espacio y que nos proporciona una gran relación de reducción de velocidad. Por estas razones es que se consideró conveniente realizar el análisis cinemático de este mecanismo, lo cual da origen a este trabajo. El diseño cinemático que se presenta está basado en la metodología para el cálculo de velocidades en un tren planetario.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
9
CAPÍTULO I
PROYECTO DE INVESTIGACIÓN SIP N° 20070288

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
10
El presente trabajo de Tesis está enmarcado dentro de los productos a obtener como resultado de la realización del Proyecto de Investigación SIP N° 20070288, del IPN, titulado “Diseño cinemático de un reductor planetario de velocidad variable”.
Dentro de las múltiples actividades que pueden, y deben, realizar los docentes
del Instituto Politécnico Nacional está la de Investigación. Esta actividad puede tener diversas modalidades o facetas; sin embargo, lo más común es la realización de Proyectos de Investigación registrados, apoyados y avalados por la Secretaría de Investigación y Posgrado (SIP) del IPN.
Para el periodo enero - diciembre 2007 la ESIME Azcapotzalco registró varios
Proyectos de Investigación, y uno de ellos es el ya indicado. En este proyecto participan algunos profesores y varios alumnos. Para el proyecto en cuestión, dentro de los alumnos participantes me encuentro yo, como sustentante de la presente Tesis.
A continuación se indican las características de dicho proyecto.
1.1.- PROTOCOLO DE INVESTIGACIÓN. El “Protocolo de Investigación” es el documento con que queda registrado
oficialmente un Proyecto de Investigación, ante la SIP del IPN. En este documento se describen las características principales del proyecto, como son: Información general del proyecto, de la escuela donde se realiza y del director del proyecto; descripción del proyecto y de los productos esperados; participantes en su ejecución; presupuesto estimado; y, programa de actividades.
A continuación se anexa copia del protocolo correspondiente.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
11
INSTITUTO POLITÉCNICO NACIONAL SECRETARÍA DE INVESTIGACIÓN Y POSGRADO
PROTOCOLO PARA PROYECTOS DE INVESTIGACIÓN O PROPUESTAS DE ESTUDIO (Enero 2007 - Diciembre 2007)
PROYECTO INDIVIDUAL X CORTO PLAZO (1 año) X
PROPUESTA DE ESTUDIO MEDIANO PLAZO (2 ó 3 años)
Información General de Investigación o Propuesta de Estudio
ESIME-AZC Sección de Estudios de Posgrado e Investigación
Escuela, Centro o Unidad Sección. División o Departamento
Título Diseño de un reductor planetario de velocidad variable.
Registro asignado por la CGPI: 20070288
Datos del director(a) del Programa, Proyecto de investigación o Propuesta de Estudio:
CAMARENA GALLARDO ANTONIO
Apellido Paterno Apellido Materno Nombres
Tipo de plaza en el IPN: Titular C - (BASE) Grado académico: Maestría
Horas de nombramiento: 40 RFC: CAGX511219IB9 CURP: CXGA511219HDFMLN02
SNI: --- BECAS: COFAA IV EDD VII EDI --- (Indicar nivel)
Teléfono oficina (Ext): 64484 Teléfono particular: 55171035
Nivel académico en el que se realizará el Proyecto de Investigación o Propuesta de Estudio:
Medio Superior Superior Posgrado X
Ubique su propuesta solamente en uno de los campos que a continuación se enuncian:
Ingeniería y Tecnología X Ciencias Sociales
Ciencias Naturales Ciencias Agrícolas
Ciencias Médicas Humanidades
Clasificación CONACyT:
Sector: Sector Educación
Subsector: Sistemas flexibles de manufactura
Tipos de investigación:
Básica Aplicada Autoequipamiento
Desarrollo Tecnológico X Educativa

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
12
M.C. ANTONIO CAMARENA GALLARDO M.C. ENRIQUE CAUICH SORIANO ING. JORGE GÓMEZ VILLARREAL
Director(a) del Proyecto de Investigación o Propuesta de Estudio
Vo. Bo. de la Academia o
Colegio de Profesores
Nombre y firma de Director(a) de la Escuela, Centro o Unidad
Nota: El título deberá ser breve, conciso y representativo del tema central de investigación
La presentación deberá hacerse de acuerdo a la siguiente estructura: 1. Descripción del proyecto
1.1 Resumen El proyecto consiste en diseñar un reductor de velocidad, de alta relación,
basado en un tren de engranes planetario, que cuente con un mecanismo que le
permita entregar una velocidad variable.
1.2 Objetivos Diseñar un mecanismo reductor de velocidad, empleando un tren de engranes
planetario, en el que se pueda seleccionar entre cinco velocidades de salida.
1.3 Producto final (descripción) Diseño de un reductor planetario de velocidad variable.
2. Subproductos esperados (escribir número)
Nacional Internacional Nacional Internacional
Artículo de Divulgación 1 0 Artículo Científico 1 0
Congresos 1 0 Seminarios 0 0
Cursos 0 0 Manuales 1 0
Libros 0 0 Programa de Radio y TV 0 0
Conferencias o Ponencias 1 0
Piloto Laboratorio Piloto Laboratorio
Proceso 0 0 Prototipo 3 0
Patente 0 0 Certificado de Invención 0 0
Hardware 0 0 Software 0 0
Medio Superior Posgrado
Tesistas 0 2 0
Practicantes Profesionales 0 0 0
Alumnos PIFI 0 3 0
Prestante de Servicio Social 0 3
Otros (especificar) 0
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
13
3. Monto y distribución del presupuesto solicitado (anexar): honorarios (sólo centros foráneos), materiales y suministros, servicios generales y equipamiento (anexar cotización)
3.1 ¿Cuenta con financiamiento externo?
No X Si
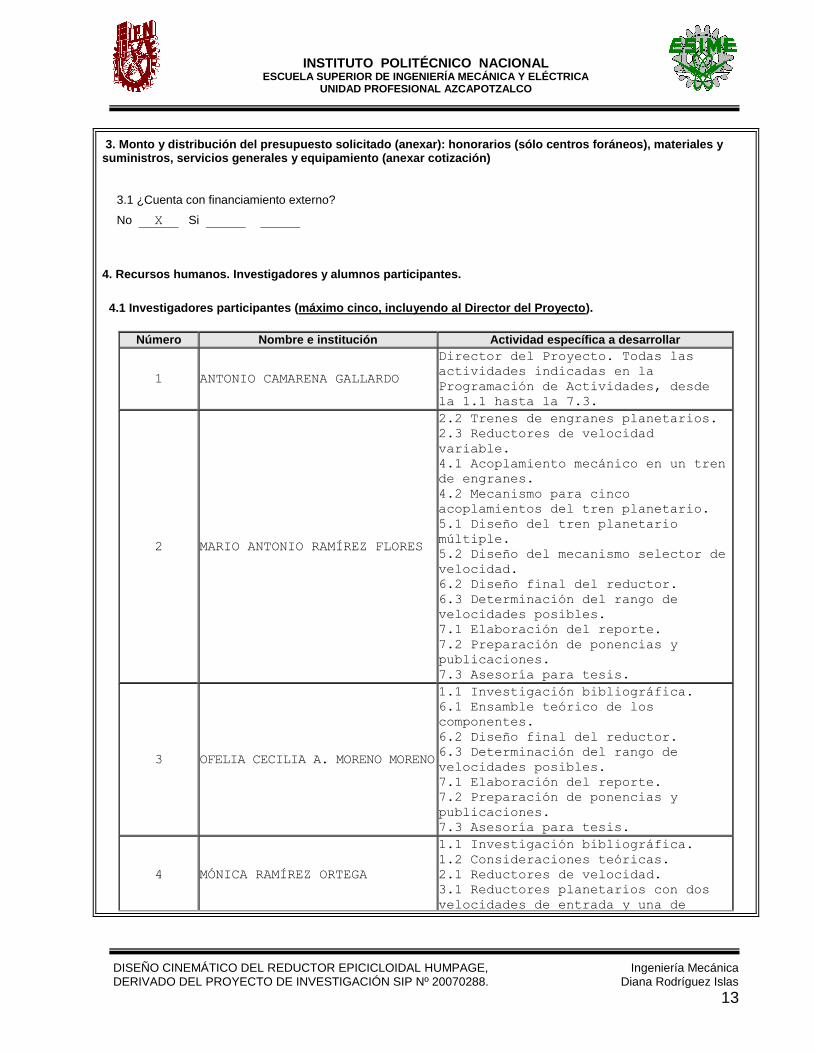
4. Recursos humanos. Investigadores y alumnos participantes.
4.1 Investigadores participantes (máximo cinco, incluyendo al Director del Proyecto).
Número Nombre e institución Actividad específica a desarrollar
1 ANTONIO CAMARENA GALLARDO
Director del Proyecto. Todas las
actividades indicadas en la
Programación de Actividades, desde
la 1.1 hasta la 7.3.
2 MARIO ANTONIO RAMÍREZ FLORES
2.2 Trenes de engranes planetarios.
2.3 Reductores de velocidad
variable.
4.1 Acoplamiento mecánico en un tren
de engranes.
4.2 Mecanismo para cinco
acoplamientos del tren planetario.
5.1 Diseño del tren planetario
múltiple.
5.2 Diseño del mecanismo selector de
velocidad.
6.2 Diseño final del reductor.
6.3 Determinación del rango de
velocidades posibles.
7.1 Elaboración del reporte.
7.2 Preparación de ponencias y
publicaciones.
7.3 Asesoría para tesis.
3 OFELIA CECILIA A. MORENO MORENO
1.1 Investigación bibliográfica.
6.1 Ensamble teórico de los
componentes.
6.2 Diseño final del reductor.
6.3 Determinación del rango de
velocidades posibles.
7.1 Elaboración del reporte.
7.2 Preparación de ponencias y
publicaciones.
7.3 Asesoría para tesis.
4 MÓNICA RAMÍREZ ORTEGA
1.1 Investigación bibliográfica.
1.2 Consideraciones teóricas.
2.1 Reductores de velocidad.
3.1 Reductores planetarios con dos
velocidades de entrada y una de

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
14
salida.
3.2 Reductores planetarios con una
velocidad de entrada y una de
salida.
5.1 Diseño del tren planetario
múltiple.
5.2 Diseño del mecanismo selector de
velocidad.
6.2 Diseño final del reductor.
6.3 Determinación del rango de
velocidades posibles.
7.1 Elaboración del reporte.
7.2 Preparación de ponencias y
publicaciones.
7.3 Asesoría para tesis.
5 VICENTE MAYAGOITIA BARRAGÁN
1.1 Investigación bibliográfica.
1.2 Consideraciones teóricas.
2.1 Reductores de velocidad.
2.2 Trenes de engranes planetarios.
2.3 Reductores de velocidad
variable.
3.1 Reductores planetarios con dos
velocidades de entrada y una de
salida.
3.2 Reductores planetarios con una
velocidad de entrada y una de
salida.
7.1 Elaboración del reporte.
7.2 Preparación de ponencias y
publicaciones.
7.3 Asesoría para tesis.
4.2 Alumnos participantes
Número Nombre Status* Actividad específica a desarrollar
1 1. (Nombre pendiente) PF
1.1 Investigación bibliográfica.
2.1 Reductores de velocidad.
3.1 Reductores planetarios con dos
velocidades de entrada y una de salida.
4.1 Acoplamiento mecánico en un tren de
engranes.
5.1 Diseño del tren planetario múltiple.
6.1 Ensamble teórico de los componentes.
7.1 Elaboración del reporte.
2 2. (Nombre pendiente) PF
1.2 Consideraciones teóricas.
2.2 Trenes de engranes planetarios.
3.2 Reductores planetarios con una
velocidad de entrada y una de salida.
4.2 Mecanismo para cinco acoplamientos
del tren planetario.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
15
5.2 Diseño del mecanismo selector de
velocidad.
6.2 Diseño final del reductor.
7.1 Elaboración del reporte.
3 3. (Nombre pendiente) PF
1.2 Consideraciones teóricas.
2.3 Reductores de velocidad variable.
3.2 Reductores planetarios con una
velocidad de entrada y una de salida.
4.2 Mecanismo para cinco acoplamientos
del tren planetario.
5.2 Diseño del mecanismo selector de
velocidad.
6.3 Determinación del rango de
velocidades posibles.
7.1 Elaboración del reporte.
4 4. (Nombre pendiente) SS
2.2 Trenes de engranes planetarios.
2.3 Reductores de velocidad variable.
4.1 Acoplamiento mecánico en un tren de
engranes.
4.2 Mecanismo para cinco acoplamientos
del tren planetario.
5.1 Diseño del tren planetario múltiple.
5.2 Diseño del mecanismo selector de
velocidad.
6.2 Diseño final del reductor.
6.3 Determinación del rango de
velocidades posibles.
7.1 Elaboración del reporte.
7.2 Preparación de ponencias y
publicaciones.
7.3 Asesoría para tesis.
5 5. (Nombre pendiente) SS
1.1 Investigación bibliográfica.
6.1 Ensamble teórico de los componentes.
6.2 Diseño final del reductor.
6.3 Determinación del rango de
velocidades posibles.
7.1 Elaboración del reporte.
7.2 Preparación de ponencias y
publicaciones.
7.3 Asesoría para tesis.
6 6. (Nombre pendiente) SS
1.1 Investigación bibliográfica.
1.2 Consideraciones teóricas.
2.1 Reductores de velocidad.
3.1 Reductores planetarios con dos
velocidades de entrada y una de salida.
3.2 Reductores planetarios con una
velocidad de entrada y una de salida.
5.1 Diseño del tren planetario múltiple.
5.2 Diseño del mecanismo selector de
velocidad.
6.2 Diseño final del reductor.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
16
6.3 Determinación del rango de
velocidades posibles.
7.1 Elaboración del reporte.
7.2 Preparación de ponencias y
publicaciones.
7.3 Asesoría para tesis.
7 7. (Nombre pendiente) TS
1.1 Investigación bibliográfica.
1.2 Consideraciones teóricas.
2.1 Reductores de velocidad.
2.2 Trenes de engranes planetarios.
2.3 Reductores de velocidad variable.
3.1 Reductores planetarios con dos
velocidades de entrada y una de salida.
3.2 Reductores planetarios con una
velocidad de entrada y una de salida.
7.1 Elaboración del reporte.
7.2 Preparación de ponencias y
publicaciones.
7.3 Asesoría para tesis.
8 8. (Nombre pendiente) TS
5.1 Diseño del tren planetario múltiple.
5.2 Diseño del mecanismo selector de
velocidad.
6.1 Ensamble teórico de los componentes.
6.2 Diseño final del reductor.
6.3 Determinación del rango de
velocidades posibles.
7.1 Elaboración del reporte.
7.2 Preparación de ponencias y
publicaciones.
7.3 Asesoría para tesis.
* PIFIS(PF); Servicio Social (SS), Tesistas (TS), Prácticas Profesionales (PP)
5.Programación de Actividades de Investigación (Enero 2007 - Diciembre 2007)
Número de meta
Valor % de
cada meta
Descripción de actividades Mes de inicio Mes de terminación
1 5
Meta 1. INVESTIGACIÓN
DOCUMENTAL:
1.1 Investigación
bibliográfica.
1.2 Consideraciones teóricas.
Enero 2007 Febrero 2007
2 5
Meta 2. DELIMITACIÓN DEL
PROBLEMA:
2.1 Reductores de velocidad.
2.2 Trenes de engranes
planetarios.
2.3 Reductores de velocidad
variable.
Enero 2007 Febrero 2007

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
17
3 15
Meta 3. DISEÑO DE UN REDUCTOR
PLANETARIO:
3.1 Reductores planetarios
con dos velocidades de
entrada y una de salida.
3.2 Reductores planetarios
con una velocidad de entrada
y una de salida.
Marzo 2007 Abril 2007
4 15
Meta 4. DISEÑO DE UN
MECANISMO PARA SELECCIÓN DE
VELOCIDADES:
4.1 Acoplamiento mecánico en
un tren de engranes.
4.2 Mecanismo para cinco
acoplamientos del tren
planetario.
Mayo 2007 Junio 2007
5 30
Meta 5. DISEÑO DE LAS PARTES
QUE CONFORMAN EL REDUCTOR:
5.1 Diseño del tren
planetario múltiple.
5.2 Diseño del mecanismo
selector de velocidad.
Julio 2007 Septiembre 2007
6 20
Meta 6. DISEÑO DE TODO EL
CONJUNTO:
6.1 Ensamble teórico de los
componentes.
6.2 Diseño final del
reductor.
6.3 Determinación del rango
de velocidades posibles.
Agosto 2007 Octubre 2007
7 10
Meta 7. REPORTE Y
SUBPRODUCTOS:
7.1 Elaboración del reporte.
7.2 Preparación de ponencias
y publicaciones.
7.3 Asesoría para tesis.
Noviembre 2007 Diciembre 2007
Porcentaje: 100 %
Nota: La planeación debe hacerse de acuerdo a las actividades del año actual (sumando 100 %), incluso si el proyecto es a mediano plazo.
6. Presupuesto
Capítulo Descripción / Concepto Total
(Pesos)
1000 ------- $ 0.00
2000 ------- $ 0.00
3000 ------- $ 0.00
5000 ------- $ 0.00
Total: $ 0.00

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
18
1.2.- INTERRELACIÓN DEL PROYECTO Y LA TESIS. La esencia del Proyecto de Investigación “Diseño cinemático de un reductor
planetario de velocidad variable” fue diseñar una variante del reductor epiciploidal “Humpage”. Esta variante consistió en modificar los engranes satélites y centrales del tren Humpage original, y agregar un mecanismo para la conexión correspondiente de estos engranes, con lo cual se obtuvo un nuevo reductor de velocidad variable.
Sin embargo, el diseño de este nuevo reductor, objeto del Proyecto de
Investigación, tiene como base fundamental el reductor Humpage. Por ello es que se decidió hacer un análisis más detallado de su funcionamiento, para establecer el diseño cinemático de este importante mecanismo.
De esta manera queda completamente claro la importancia de haber
desarrollado este trabajo, así como la interrelación, más que directa, entre el Proyecto de investigación ya descrito y la presente Tesis.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
19
CAPÍTULO 2
MARCO TEÓRICO

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
20
2.1.- INTRODUCCIÓN A LOS TRENES DE ENGRANES Desde el minúsculo reloj de pulsera al motor de un transatlántico, son
innumerables los mecanismos que cumplen su cometido gracias a los engranajes. El engranaje es una rueda o cilindro dentado empleado para transmitir un movimiento giratorio o alternativo desde una parte de una máquina a otra. Un conjunto de dos o más engranajes que transmite el movimiento de un eje a otro se denomina tren de engranajes. Los engranajes se utilizan sobre todo para transmitir movimiento giratorio, pero usando engranajes apropiados y piezas dentadas planas pueden transformar movimiento alternativo en giratorio y viceversa.
Hay varios tipos de engranajes, el más sencillo es el engranaje recto, una rueda con dientes paralelos al eje tallados en su perímetro. Los engranajes rectos transmiten movimiento giratorio entre dos ejes paralelos. En un engranaje sencillo, el eje impulsado gira en sentido opuesto al eje impulsor. Si se desea que ambos ejes giren en el mismo sentido se introduce una rueda dentada denominada 'rueda loca' entre el engranaje impulsor o motor y el impulsado. La rueda loca gira en sentido opuesto al eje impulsor, por lo que mueve al engranaje impulsado en el mismo sentido que éste. En cualquier sistema de engranajes, la velocidad del eje impulsado depende del número de dientes de cada engranaje. Un engranaje con 10 dientes movido por un engranaje con 20 dientes girará dos veces más rápido que el engranaje impulsor, mientras que un engranaje de 20 dientes impulsado por uno de 10 se moverá la mitad de rápido. Empleando un tren de varios engranajes puede variarse la relación de velocidades dentro de unos límites muy amplios.
Los engranajes interiores o anulares son variaciones del engranaje recto en los
que los dientes están tallados en la parte interior de un anillo o de una rueda con reborde, en vez de en el exterior. Los engranajes interiores suelen ser impulsados por un piñón, un engranaje pequeño con pocos dientes. La cremallera (barra dentada plana que avanza en línea recta) funciona como una rueda dentada de radio infinito y puede emplearse para transformar el giro de un piñón en movimiento alternativo, o viceversa.
Los engranajes cónicos, así llamados por su forma, tienen dientes rectos y se
emplean para transmitir movimiento giratorio entre ejes no paralelos. Y también están los engranajes helicoidales, los dientes de éstos no son paralelos al eje de la rueda dentada, sino que se enroscan en torno al eje en forma de hélice. Estos engranajes son apropiados para grandes cargas porque los dientes engranan formando un ángulo agudo, en lugar de 90º como en un engranaje recto. Los engranajes helicoidales sencillos tienen la desventaja de producir una fuerza que tiende a mover las ruedas dentadas a lo largo de sus ejes. Esta fuerza puede evitarse empleando engranajes helicoidales dobles, o bihelicoidales, con dientes en forma de V compuestos de medio diente helicoidal dextrógiro y medio diente helicoidal levógiro. Los engranajes hipoides son engranajes cónicos helicoidales utilizados cuando los ejes son

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
21
perpendiculares pero no están en un mismo plano. Una de las aplicaciones más corrientes del engranaje hipoide es para conectar el árbol de la transmisión con las ruedas en los automóviles de tracción trasera. A veces se denominan de forma incorrecta engranajes en espiral los engranajes helicoidales empleados para transmitir rotación entre ejes no paralelos.
Otra variación del engranaje helicoidal es el engranaje de husillo, también llamado tornillo sin fin. En este sistema, un tornillo sin fin largo y estrecho dotado de uno o más dientes helicoidales continuos engrana con una rueda dentada helicoidal. La diferencia entre un engranaje de husillo y un engranaje helicoidal es que los dientes del primero se deslizan a lo largo de los dientes del engranaje impulsado en lugar de ejercer una presión de rodadura directa. Los engranajes de husillo se utilizan para transmitir rotación (con una gran reducción de velocidad) entre dos ejes perpendiculares.
2.1.1- Historia y evolución
• Los engranes en la mitología: Nadie sabe a ciencia cierta donde se inventaron los engranajes, sin embargo han
estado transmitiendo movimiento de una manera u otra por mucho tiempo.
Elemento del “Mecanismo de Anticitera”, El mecanismo de engranes más antiguo preservado (80 A.C.).
Los registros más antiguos de posibles diseños de engranajes provienen de la
literatura de la antigua China, Grecia y Turquía, en específico de la ciudad de Antioquía y de Siria, en especial de Damasco su capital, famosa por sus armas blancas.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
22
De cualquier manera, muchas de estas referencias son vagas y de poco fiar, ya que en los textos de esa época es difícil, si no imposible, identificar donde comienza el relato a ser historia y donde deja de ser mitología.
La mayoría de los relatos son descripciones de batallas libradas contra el
enemigo o de guerras de conquista, y por supuesto son relatos en donde los derrotados describen a sus enemigos como guerreros de fuerza extrema, capaces de cargar rocas de cien veces su peso con un solo movimiento de su mano y que podían lanzarlas tan lejos como querían.
En la actualidad, y en base al conocimiento que se tiene, eso hace referencia a que utilizaron algún tipo de mecanismo, sin embargo los relatos lo describen como algo mágico o sobrenatural. Por si fuera poco, los vencedores de la batalla relatan su historia jactándose de la superioridad ante sus enemigos, y de cuán fácil fue vencerlos con el simple movimiento de su mano.
Para complicar aún más este asunto, los mecanismos citados en la literatura antigua solo contienen descripciones textuales de los dispositivos, en los cuales se puede o no utilizar engranes en su funcionamiento, ya que alternativamente pueden haberse empleado poleas o ruedas de fricción, sin embargo no se ha encontrado evidencia física de su existencia.
• Evolución de los materiales para los engranes
Juzgar mediante la historia escrita en los libros es una cosa, encontrar evidencia palpable de los engranajes es otra. El mayor problema en encontrar evidencia arqueológica de engranajes radica en que los primeros engranes fueron hechos de madera tallada, con lo cual es más que evidente que al paso del tiempo se degradan completamente y difícilmente dejan rastros debido al tipo de material empleado.
Por otro lado en los registros bíblicos antiquísimos se encuentra que los metales
se trabajaban desde el 4000 A.C. y menciona a un Tubal-Caín como el artífice del hierro y del bronce.
Así que bajo esta evidencia teórica bien pudo haber sido factible que se fabricaran engranajes de bronce o hierro, aunque es necesario recordar que el uso de dichos materiales se encontraba restringido por las limitadas cantidades que se podían obtener y que sólo eran destinadas como obsequio a reyes y faraones.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
23
Tal es el caso de una cuña de metal forjado que data del 3000 A.C., encontrada en la gran pirámide de Keops, rey de Egipto de la IV dinastía. Actualmente esta pieza arqueológica se encuentra en el museo Británico y es una prueba palpable de que el hierro ya se trabajaba en esas épocas.
Sin embargo dicho hallazgo también fortalece la hipótesis de que verdaderamente sólo se utilizaban para artículos religiosos u obsequios para reyes y difícilmente se utilizarían para fabricar engranes, si es que ya existían en esa época.
Ya para el año 2000 A.C. cuando la civilización asiria empezaba a formarse, aún bajo la opresión de Caldea y Egipto, la metalurgia del hierro comenzaba a desarrollarse con mayor fuerza.
Los asirios fueron quienes primero consiguieron producir a gran escala hierro y bronce, perfeccionando los métodos y logrando, con ayuda de esta ventaja técnica, su libertad como pueblo para el 1300 A.C. bajo el reinado de Teglatfalasar.
Ya como pueblo en libertad hacia el 800 A.C. bajo el reinado de Salmanasar habían formado un verdadero imperio y hacia el año 730 A.C. al mando de Salmanasar V habían invadido Caldea, que para ese entonces ya se conocía como Babilonia, además del territorio Egipcio, extendiendo así su imperio desde el Mediterráneo hasta el mar Caspio, y del sur del mar Negro al Golfo Pérsico. Su grandeza: su rey Salmanasar V, su fama: el dominio del hierro y el bronce, su orgullo: el imperio formado.
Los mejores artesanos del hierro se formaron durante el imperio Asirio y su acentuación se dio en Damasco. Al paso de los siglos lograrían un dominio sobre el arte de la metalurgia a tal grado que las armas blancas que fabricaban extendieran su fama hasta los primeros siglos de la era cristiana.
Hasta este punto de la historia no se ha encontrado evidencia textual y mucho
menos física de la existencia de engranajes, sin embargo ya existía la materia prima necesaria para fabricarlos en bronce o en hierro.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
24
• Aristóteles y la evidencia textual del engrane
Hacia el año 700 A.C. el imperio Asirio colindaba hacia el mar Caspio con el
imperio Medo, y hacia el mediterráneo superior con el imperio Persa, en el año 612 A.C. se formó la coalición entre medos y babilonios, tomando Nínive, la ciudad capital de Asiria, mientras los Persas bajo el mando de Ciro tomaron Macedonia, y avanzaron hasta conquistar todo el imperio asirio y medo extendiéndose hasta la India, ya bajo el mando de Darío I en el año 500 A.C. Por más de cien años, los Persas se mantuvieron firmes en su intento de conquista de Grecia, sin lograrlo.
Sin embargo, hacia el 595 A.C. perdieron el territorio de Macedonia a manos de Filipo quien gobernó del 400 al 356 A.C. fecha en que tomo posesión del reinado su hijo Alejandro Magno, discípulo de Aristóteles quien conocía y dominaba la tecnología y filosofía helénica.
Esto le dio a su discípulo hacia el 335 A.C. la conquista de Grecia, nombrándose
Generalísimo del ejercito Helénico, con quienes combatió y derrotó al imperio persa, apoderándose de Egipto, en donde en su honor fundó la ciudad de Alejandría hacia el 330 A.C.,6 su imperio se extendió hasta el Mar Caspio y Pérsico.
El Imperio Asirio hacia el 700 A.C.
En este contexto, cabe destacar que el registro más antiguo de la posible
descripción de un mecanismo de engranaje proviene de la escuela de Aristóteles de un trabajo titulado “Problemas de Mecánica”, alrededor del 300 A.C.1
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
25
En él se describe un mecanismo de ruedas entrelazadas, nuevamente no haciendo referencia específica a ruedas dentadas, por lo que pudieron ser ruedas de fricción con ondulación grande en su periferia.
De ser así se estaría hablando del prototipo de rueda dentada, ya que se entrelazan las dos ruedas por bordes en alto y bajo relieve a los que nombraremos dientes del engrane, que aunque aún no poseían una dimensión determinada cumplen con el objetivo de transmitir movimiento entrelazando dos ruedas.
Prototipo de engrane de madera con bordes en alto
y bajo relieve.
• El diseño más antiguo
Paralelamente, con la muerte de Aristóteles su escuela entró en decadencia hacia el 322 A.C. y el imperio macedonio se dividió entre los generales de Alejandro.
Nuevamente centraremos la atención en el Mediterráneo, haciendo notar que la evidencia más clara y palpable del diseño más antiguo de un engrane viene del mediterráneo oriental. Remarcando que en ese tiempo Sicilia, en donde vivía Arquímedes (300 al 212 A.C), pertenecía a la Macedonia Griega.
Para estos tiempos se sabe que ya existían los engranes, de hecho a
Arquímedes se le atribuye el mecanismo de tornillo, el cual es el principio del mecanismo de corona sinfín y es de quien se tiene la evidencia del uso práctico de los engranes.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
26
También se sabe que la metalurgia de hierro y de otros metales ya era bien conocida y dominada por los distintos pueblos, desde lo que actualmente conocemos como Turquía y medio oriente hasta Europa.
Diseño de engrane corona y tornillo sinfín atribuido a Arquímedes.
A partir de esta fecha (300 A.C) ya se encuentran escritos con evidencia clara y
concisa de que los engranes ya existían y su uso era bien entendido y empleado por los habitantes de la época.
Vitrubio reporta hacia el 25 A.C1 que en la época de Arquímedes se fabricaban
relojes de agua en los que se incluían engranes y cremalleras en su maquinaria, convirtiéndolos en instrumentos de gran precisión.
Tal es el caso de un gran inventor de esa época, Ctesbios de Alejandría, quien
era peluquero de oficio y cuyos inventos incluían engranajes.
Dispositivo de engrane y cremallera. Reloj de agua diseñado por Ctesbios de Alejandría en el que se utilizan engranes.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
27
• Rastros arqueológicos de los engranes
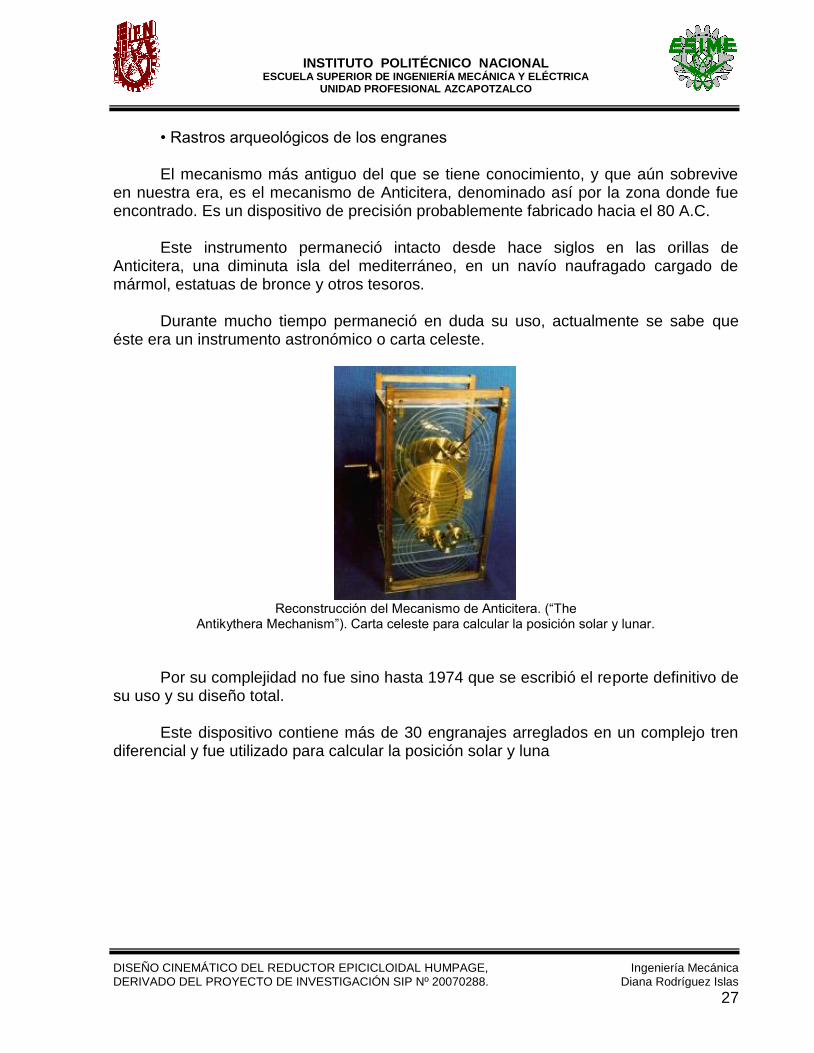
El mecanismo más antiguo del que se tiene conocimiento, y que aún sobrevive en nuestra era, es el mecanismo de Anticitera, denominado así por la zona donde fue encontrado. Es un dispositivo de precisión probablemente fabricado hacia el 80 A.C.
Este instrumento permaneció intacto desde hace siglos en las orillas de
Anticitera, una diminuta isla del mediterráneo, en un navío naufragado cargado de mármol, estatuas de bronce y otros tesoros.
Durante mucho tiempo permaneció en duda su uso, actualmente se sabe que
éste era un instrumento astronómico o carta celeste.
Reconstrucción del Mecanismo de Anticitera. (“The
Antikythera Mechanism”). Carta celeste para calcular la posición solar y lunar.
Por su complejidad no fue sino hasta 1974 que se escribió el reporte definitivo de su uso y su diseño total.
Este dispositivo contiene más de 30 engranajes arreglados en un complejo tren
diferencial y fue utilizado para calcular la posición solar y luna
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
28
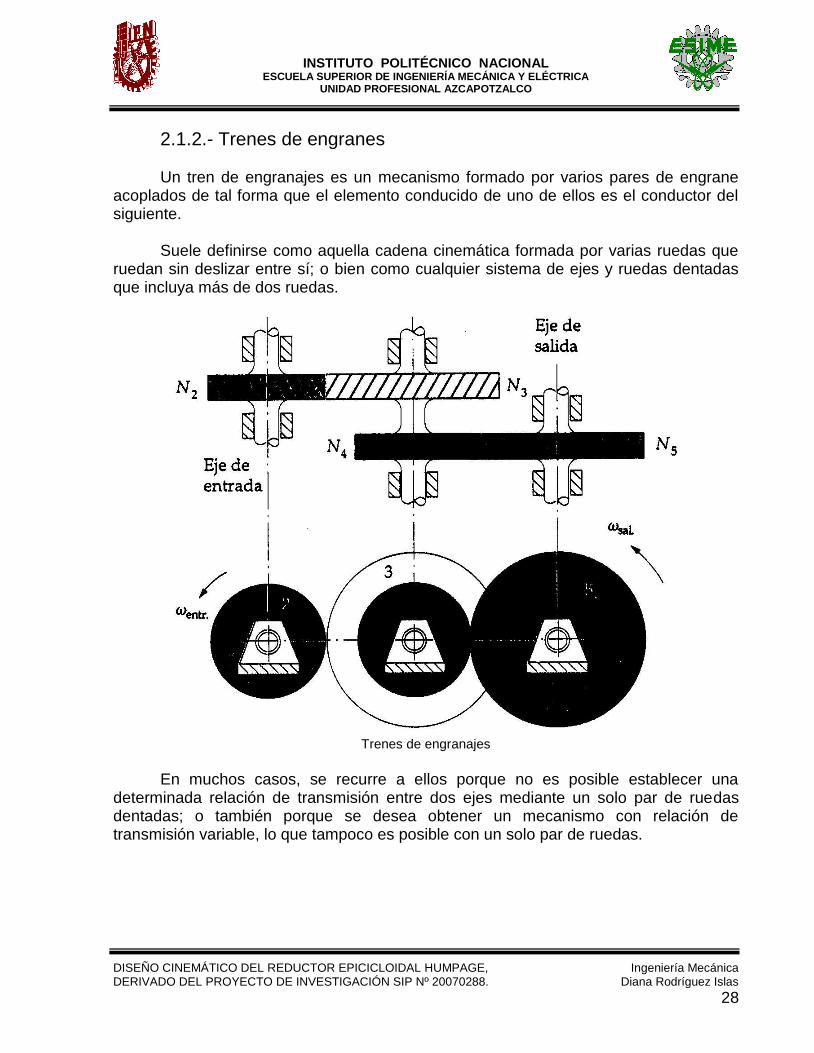
2.1.2.- Trenes de engranes Un tren de engranajes es un mecanismo formado por varios pares de engrane
acoplados de tal forma que el elemento conducido de uno de ellos es el conductor del siguiente.
Suele definirse como aquella cadena cinemática formada por varias ruedas que
ruedan sin deslizar entre sí; o bien como cualquier sistema de ejes y ruedas dentadas que incluya más de dos ruedas.
Trenes de engranajes
En muchos casos, se recurre a ellos porque no es posible establecer una
determinada relación de transmisión entre dos ejes mediante un solo par de ruedas dentadas; o también porque se desea obtener un mecanismo con relación de transmisión variable, lo que tampoco es posible con un solo par de ruedas.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
29
2.1.3.- Ley Fundamental del engranaje
La acción de los dientes acoplados de los engranes, uno sobre otros, para producir un movimiento rotatorio, puede compararse con una leva y su seguidor. Cuando a los perfiles del diente (o los de la leva y el seguidor) se les da una forma tal como para que produzcan una razón constante entre las velocidades angulares durante el endentamiento, se dice que las superficies son conjugadas. Es posible especificar cualquier perfil para un diente y luego encontrar un perfil para el diente que se va a acoplar o entrelazar con él, de tal modo que las superficies sean conjugadas. Unas de estas soluciones es el perfil de involuta que, con unas cuantas excepciones, se utiliza universalmente en los dientes de engranes.
La acción de un solo par de dientes acoplados conforme recorren toda una fase de tal acción debe ser tal que la razón de la velocidad angular del engrane impulsor a la del engrane impulsado se mantenga constante. Este es el criterio fundamental que rige la selección de los perfiles del diente. Si esto no se cumpliera para el engranaje, se tendrían vibraciones muy serias y problemas de impacto, incluso a velocidades bajas.
Teorema de la razón de velocidades angulares
En la siguiente figura, P24 es el centro instantáneo común a los eslabones 2 y 4. Su
velocidad absoluta VP24 es la misma ya sea que P24 se considere como un punto del eslabón 2, o bien, del 4.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
30
Considerándolo de cada manera, se puede escribir:
(a)
Donde ω2/1 y ω4/1 son iguales a ω2 y ω4, respectivamente; pero se ha escrito el
subíndice adicional para enfatizar en al presencia del tercer eslabón (el marco). Considerando solo las magnitudes, la ecuación anterior se puede reordenar para quedar:
ω4/1
𝜔2/1=
𝑅𝑃24𝑃12
𝑅𝑃24𝑃14
Este sistema ilustra el teorema de la razón de velocidades angulares. El teorema
afirma que la razón de las velocidades angulares de dos cuerpos cualesquiera en movimiento plano, en relación con un tercer cuerpo, es inversamente proporcional a los segmentos en los que el centro instantáneo común corta la línea de los centros. Escrito en notación general, para el movimiento de los cuerpos j y k, en relación con el cuerpo i, la ecuación es:
ω𝑘/𝑖
𝜔𝑗/𝑖=
𝑅𝑃𝑗𝑘 𝑃𝑖𝑗
𝑅𝑃𝑗𝑘 𝑃𝑖𝑘
Si se escoge una dirección positiva arbitraria, a lo largo de la línea de los centros, se debe probar por si mismo que la razón de velocidades angulares es positiva cuando el centro instantáneo común queda fuera de los otros dos centros, y negativa cuando queda entre ellos.
Como se ha explicado en el teorema de la razón de las velocidades angulares de cualquier mecanismo es inversamente proporcional a los segmentos en los que el polo común corta la línea de los centros.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
31
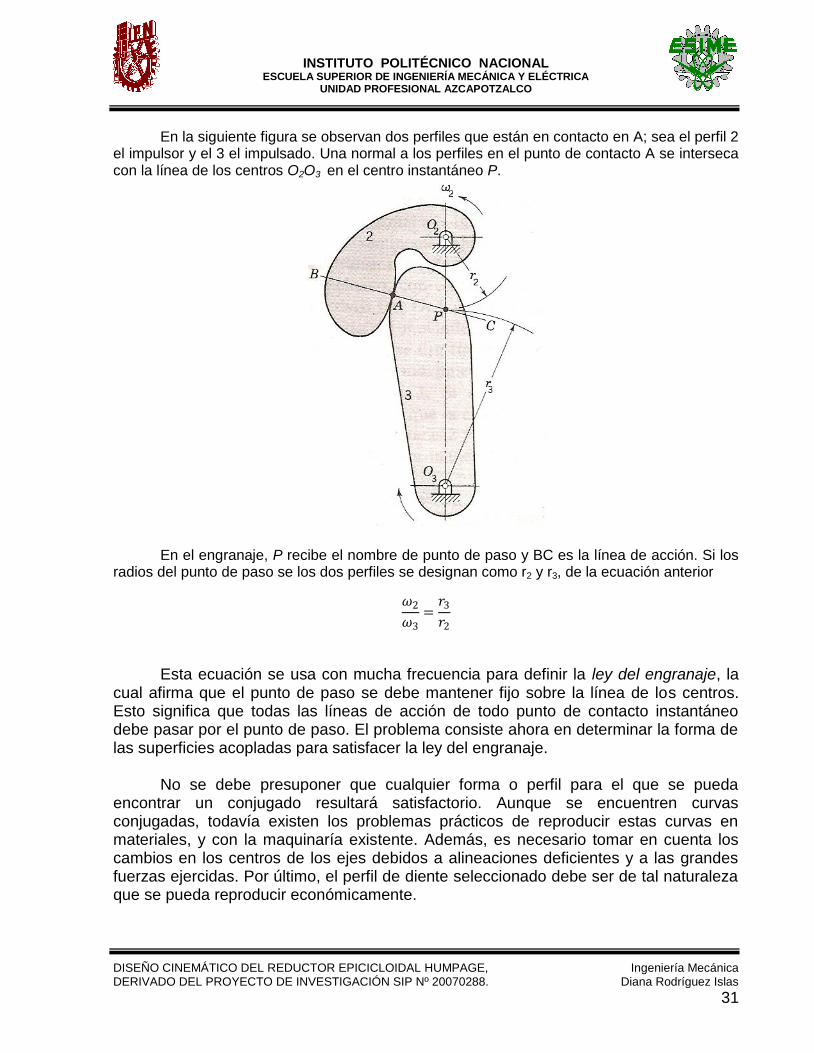
En la siguiente figura se observan dos perfiles que están en contacto en A; sea el perfil 2 el impulsor y el 3 el impulsado. Una normal a los perfiles en el punto de contacto A se interseca con la línea de los centros O2O3 en el centro instantáneo P.
En el engranaje, P recibe el nombre de punto de paso y BC es la línea de acción. Si los radios del punto de paso se los dos perfiles se designan como r2 y r3, de la ecuación anterior
𝜔2
𝜔3=
𝑟3
𝑟2
Esta ecuación se usa con mucha frecuencia para definir la ley del engranaje, la
cual afirma que el punto de paso se debe mantener fijo sobre la línea de los centros. Esto significa que todas las líneas de acción de todo punto de contacto instantáneo debe pasar por el punto de paso. El problema consiste ahora en determinar la forma de las superficies acopladas para satisfacer la ley del engranaje.
No se debe presuponer que cualquier forma o perfil para el que se pueda
encontrar un conjugado resultará satisfactorio. Aunque se encuentren curvas conjugadas, todavía existen los problemas prácticos de reproducir estas curvas en materiales, y con la maquinaría existente. Además, es necesario tomar en cuenta los cambios en los centros de los ejes debidos a alineaciones deficientes y a las grandes fuerzas ejercidas. Por último, el perfil de diente seleccionado debe ser de tal naturaleza que se pueda reproducir económicamente.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
32
2.1.4.- Aplicación de los trenes de engranes
Son tan numerosos como variadas y las más de las veces no se limitan a un par de ruedas, sino a combinaciones más numerosas, en forma de tren de engranajes. Se puede obtener así cualquier cambio de velocidad. Si, como en la figura de abajo, un piñón motor (1) arrastra una rueda mayor (2) en cuyo mismo eje va calado otro piñón (3) que, a su vez, ataca a otra rueda (4) y así sucesivamente, el número de revoluciones disminuye según la fórmula inserta más arriba. Pero si ese mismo tren funciona al revés, siendo la rueda 4 motriz y transmitiéndose el movimiento de las ruedas a los piñones, la velocidad transmitida en 4 quedará multiplicada en 1 en las mismas proporciones. Las ruedas pares giran en sentido contrario al del eje del motor y las impares en el mismo sentido que éste. Es posible, no obstante, transmitir el movimiento sin cambio de su sentido adoptando una rueda conducida de engranaje interno, o sea, en forma de corona que lleva tallados los dientes en la superficie interior de la llanta.
El tren de engranajes de un reloj mecánico permite que unas pocas vueltas del barrilete motor hagan dar más de 1500 vueltas al piñón minutero.
En un automóvil, el cambio de velocidades permite combinar varias ruedas y piñones con objeto de adaptar la carga al régimen del motor, así como para invertir la marcha. El diferencial de ese mismo vehículo constituye otro ejemplo de las muchas posibilidades que ofrecen los engranajes pues, además de transmitir el movimiento del árbol motor entre ejes que forman ángulo de 90º, permite que la rueda del coche situada en el interior de los virajes ruede con menor velocidad que la rueda exterior.
En los ferrocarriles de cremallera, piñones dentados de la locomotora engranan en una cremallera fijada en las traviesas; los trenes pueden subir así por pendientes
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
33
superiores a las que la simple adherencia de las ruedas permitiría franquear a un tren ordinario.
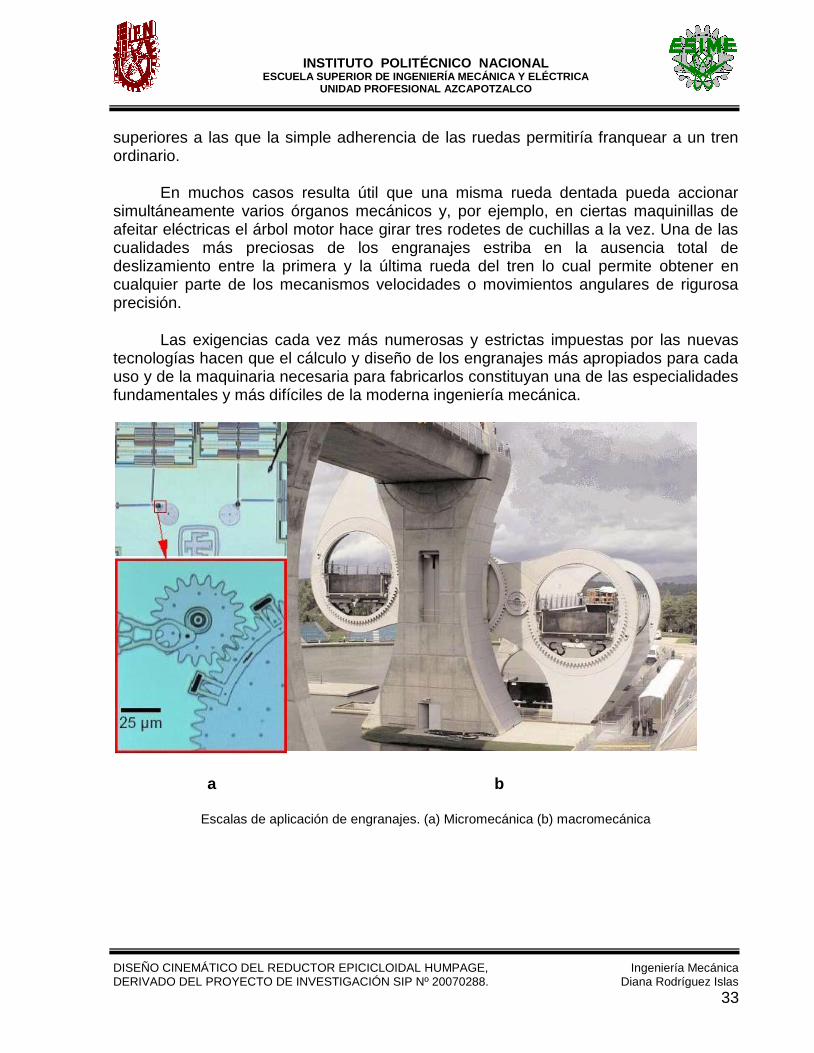
En muchos casos resulta útil que una misma rueda dentada pueda accionar simultáneamente varios órganos mecánicos y, por ejemplo, en ciertas maquinillas de afeitar eléctricas el árbol motor hace girar tres rodetes de cuchillas a la vez. Una de las cualidades más preciosas de los engranajes estriba en la ausencia total de deslizamiento entre la primera y la última rueda del tren lo cual permite obtener en cualquier parte de los mecanismos velocidades o movimientos angulares de rigurosa precisión.
Las exigencias cada vez más numerosas y estrictas impuestas por las nuevas tecnologías hacen que el cálculo y diseño de los engranajes más apropiados para cada uso y de la maquinaria necesaria para fabricarlos constituyan una de las especialidades fundamentales y más difíciles de la moderna ingeniería mecánica.
a b
Escalas de aplicación de engranajes. (a) Micromecánica (b) macromecánica
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
34
2.2.- TIPOS DE ENGRANES
Engranaje es una rueda o cilindro dentado empleado para transmitir un movimiento giratorio o alternativo desde una parte de una máquina a otra. Un conjunto de dos o más engranajes que transmite el movimiento de un eje a otro se denomina tren de engranajes. Los engranajes se utilizan sobre todo para transmitir movimiento giratorio, pero usando engranajes apropiados y piezas dentadas planas pueden transformar movimiento alternativo en giratorio y viceversa.
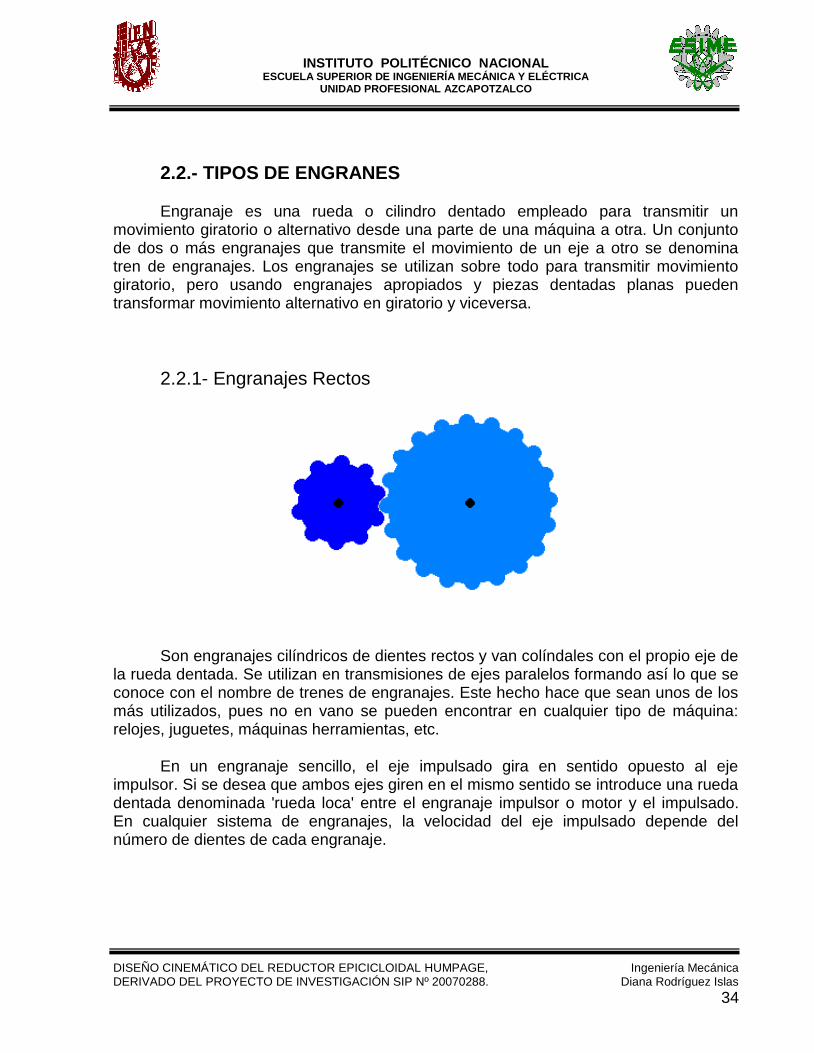
2.2.1- Engranajes Rectos
Son engranajes cilíndricos de dientes rectos y van colíndales con el propio eje de la rueda dentada. Se utilizan en transmisiones de ejes paralelos formando así lo que se conoce con el nombre de trenes de engranajes. Este hecho hace que sean unos de los más utilizados, pues no en vano se pueden encontrar en cualquier tipo de máquina: relojes, juguetes, máquinas herramientas, etc.
En un engranaje sencillo, el eje impulsado gira en sentido opuesto al eje impulsor. Si se desea que ambos ejes giren en el mismo sentido se introduce una rueda dentada denominada 'rueda loca' entre el engranaje impulsor o motor y el impulsado. En cualquier sistema de engranajes, la velocidad del eje impulsado depende del número de dientes de cada engranaje.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
35
• Rectos exteriores o simplemente rectos:
Es el tipo de engranaje más simple y corriente, generalmente, para velocidades medias.
• Interiores:
Pueden ser con dentado recto, helicoidal o doble-helicoidal. Engranajes de gran aplicación en los llamados “trenes epicicloidales o planetarios”.
2.2.2.- Engranajes Helicoidales
Los dientes de estos engranajes no son paralelos al eje de la rueda dentada, sino que se enroscan en torno al eje en forma de hélice. Estos engranajes son apropiados para grandes cargas porque los dientes engranan formando un ángulo agudo, en lugar de 90º como en un engranaje recto.
A veces se denominan de forma incorrecta engranajes en espiral los engranajes helicoidales empleados para transmitir rotación entre ejes no paralelos.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
36
Ventajas del uso de engranajes
Presentan un comportamiento más silencioso que el de los dientes rectos usándolos entre ejes paralelos.
Poseen una mayor relación de contacto debido al efecto de traslape de los dientes.
Pueden transmitir mayores cargas a mayores velocidades debido al embonado gradual que poseen.
Desventajas de engranajes helicoidales
La principal desventaja de utilizar este tipo de engranaje, es la fuerza axial que este produce, para contrarrestar esta reacción se tiene que colocar una chumacera que soporte axialmente y transversalmente al árbol.
TIPOS
2.2.2.1.- Engranajes Helicoidales de ejes paralelos
Se emplea para transmitir movimiento o fuerzas entre ejes paralelos, pueden ser considerados como compuesto por un número infinito de engranajes rectos de pequeño espesor escalonado, el resultado será que cada diente está inclinado a lo largo de la cara como una hélice cilíndrica.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
37
2.2.2.2.- Engranajes Helicoidales de ejes cruzados
Son la forma más simple de los engranajes cuyas flechas no se interceptan teniendo una acción conjugada (puede considerárseles como engranajes sinfín no envolventes), la acción consiste primordialmente en una acción de tornillo o de cuña, resultando un alto grado de deslizamiento en los flancos del diente.
El contacto en un punto entre diente acoplado limita la capacidad de transmisión de carga para este tipo de engranes.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
38
2.2.2.3.- Engranajes helicoidales dobles
Los engranajes "espina de pescado" son una combinación de hélice derecha e izquierda. El empuje axial que absorben los apoyos o cojinetes de los engranajes helicoidales es una desventaja de ellos y ésta se elimina por la reacción del empuje igual y opuesto de una rama simétrica de un engrane helicoidal doble.
Un miembro del juego de engranes "espina de pescado" debe ser apto para absorber la carga axial de tal forma que impida las carga excesivas en el diente provocadas por la disparidad de las dos mitades del engranaje.
2.2.3.- Engranes cónicos
Los engranajes cónicos, así llamados por su forma, tienen dientes rectos y se emplean para transmitir movimiento giratorio entre ejes no paralelos.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
39
Se utilizan para transmitir movimiento entre ejes perpendiculares, aunque también se fabrican formando ángulos diferentes a 90 grados. Se trata de ruedas dentadas en forma de troncos de cono, con dientes tallados en una de sus superficies laterales. Dichos dientes pueden ser rectos o curvos (hipoides), siendo estos últimos muy utilizados en sistemas de transmisión para automóviles.
Se fabrican a partir de un trozo de cono, formando los dientes por fresado de su superficie exterior. Los dientes pueden ser rectos, helicoidales o curvos. Esta familia de engranajes soluciona la transmisión entre ejes que se cortan y que se cruzan. Los engranajes cónicos tienen sus dientes cortados sobre la superficie de un tronco de cono.
• Cónico-rectos:
Efectúan la transmisión de movimiento de ejes que se cortan en un mismo plano, generalmente en ángulo recto, por medio de superficies cónicas dentadas. Los dientes convergen en el punto de intersección de los ejes.
• Cónico-helicoidales:
Engranajes cónicos con dientes no rectos.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
40
2.2.4.- Cónicos en espiral
En los cónico-espirales, la curva del diente en la rueda-plana, depende del procedimiento o máquina de dentar, aplicándose en los casos de velocidades elevadas para evitar el ruido que producirían los cónico-rectos.
2.2.5.- Cónico-Hipoides
Para ejes que se cruzan, generalmente en ángulo recto, empleados principalmente en el puente trasero del automóvil y cuya situación de ejes permite la colocación de cojinetes en ambos lados del piñón.
2.2.6.- De tornillo-sin-fin
Generalmente cilíndricos. Pueden considerarse derivados de los helicoidales para ejes cruzados, siendo el tornillo una rueda helicoidal de un solo diente (tornillo de un filete) o de varios (dos o más). La rueda puede ser helicoidal simple o especial para tornillo-sin-fin, en la que la superficie exterior y la de fondo del diente son concéntricas con las cilíndricas del tornillo.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
41
2.3.- TRENES DE ENGRANES
Los engranajes son eslabones de un mecanismo que se llama tren de engranes o engranaje, y que en la gran mayoría de los casos sirve para transmitir movimiento de rotación entre ejes.
Un engranaje consiste generalmente en un disco circular que esta montado sobre un eje de rotación y que en su contorno hay una serie de salientes o protuberancias que se llaman dientes, los cuales arrastran o engranan con los dientes de otro engrane con el que está en contacto, el cual también gira sobre un eje.
Clasificación de los trenes de engranes
Los trenes de engranajes se pueden clasificar de la siguiente manera:
Trenes ordinarios:
Trenes ordinarios simples.
Trenes ordinarios compuestos
Trenes epicicloidales:
Trenes epicicloidales simples
Trenes de engranajes diferenciales
Trenes mixtos:
Corresponden a combinaciones de los otros dos tipos.
Existen algunas diferencias entre estos tipos de trenes de engranajes. La diferencia en los trenes epicicloidales reside en que poseen algún eje que tiene movimiento relativo respecto de los demás; mientras que en los trenes ordinarios el único movimiento que pueden tener los ejes es el de giro sobre sí mismos.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
42
2.3.1.- Tren ordinario simple
En un tren ordinario, las ruedas extremas del tren giran sobre los dos ejes entre los que ha de establecerse la relación de transmisión deseada. En él, todos los ejes de las ruedas que lo componen (tanto extremas como intermedias) apoyan sobre un mismo soporte fijo.
• Relación de transmisión. Criterio de signos Se dice que un TREN ORDINARIO es, además, SIMPLE cuando cada eje
contiene únicamente una rueda.
Tren ordinario simple
2.3.2.- Tren ordinario compuesto
Un tren ordinario compuesto es aquel donde hay sobre un mismo eje dos o mas engranes, que por lo tanto van a la misma velocidad, y en donde todos ellos intervienen en la transmisión del movimiento.
Tren ordinario compuesto
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
43
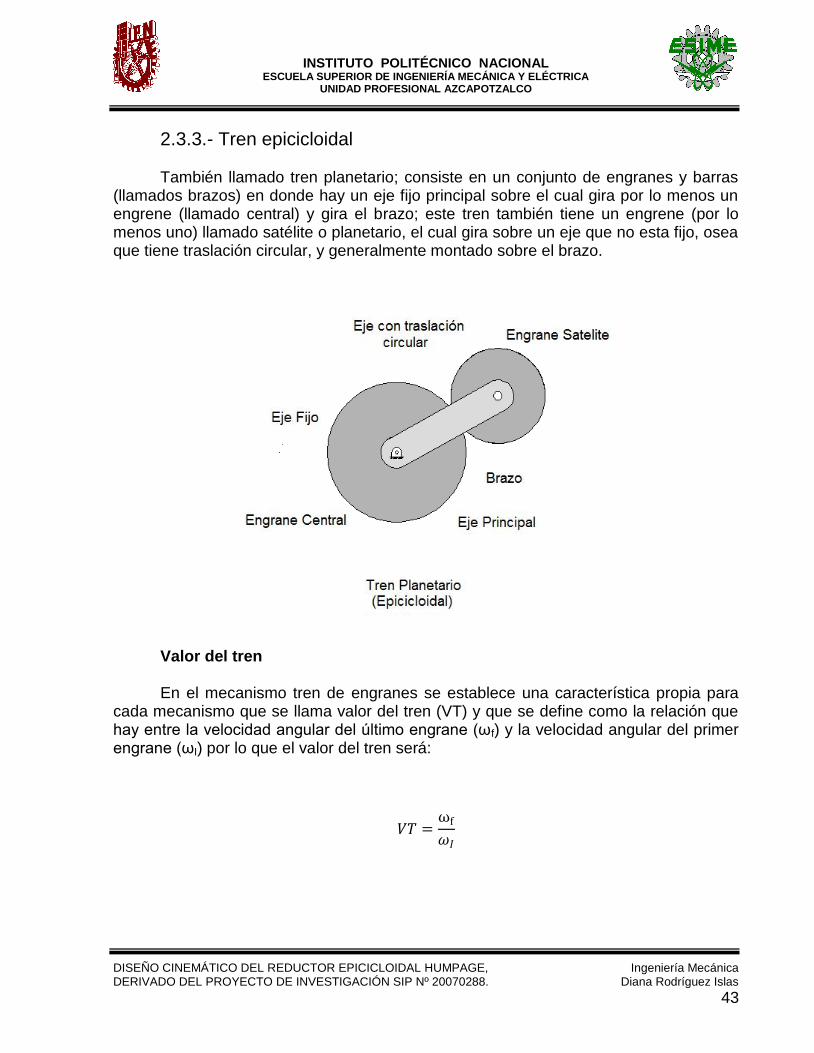
2.3.3.- Tren epicicloidal
También llamado tren planetario; consiste en un conjunto de engranes y barras (llamados brazos) en donde hay un eje fijo principal sobre el cual gira por lo menos un engrene (llamado central) y gira el brazo; este tren también tiene un engrene (por lo menos uno) llamado satélite o planetario, el cual gira sobre un eje que no esta fijo, osea que tiene traslación circular, y generalmente montado sobre el brazo.
Valor del tren En el mecanismo tren de engranes se establece una característica propia para
cada mecanismo que se llama valor del tren (VT) y que se define como la relación que hay entre la velocidad angular del último engrane (ωf) y la velocidad angular del primer engrane (ωI) por lo que el valor del tren será:
𝑉𝑇 =ωf
𝜔𝐼
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
44
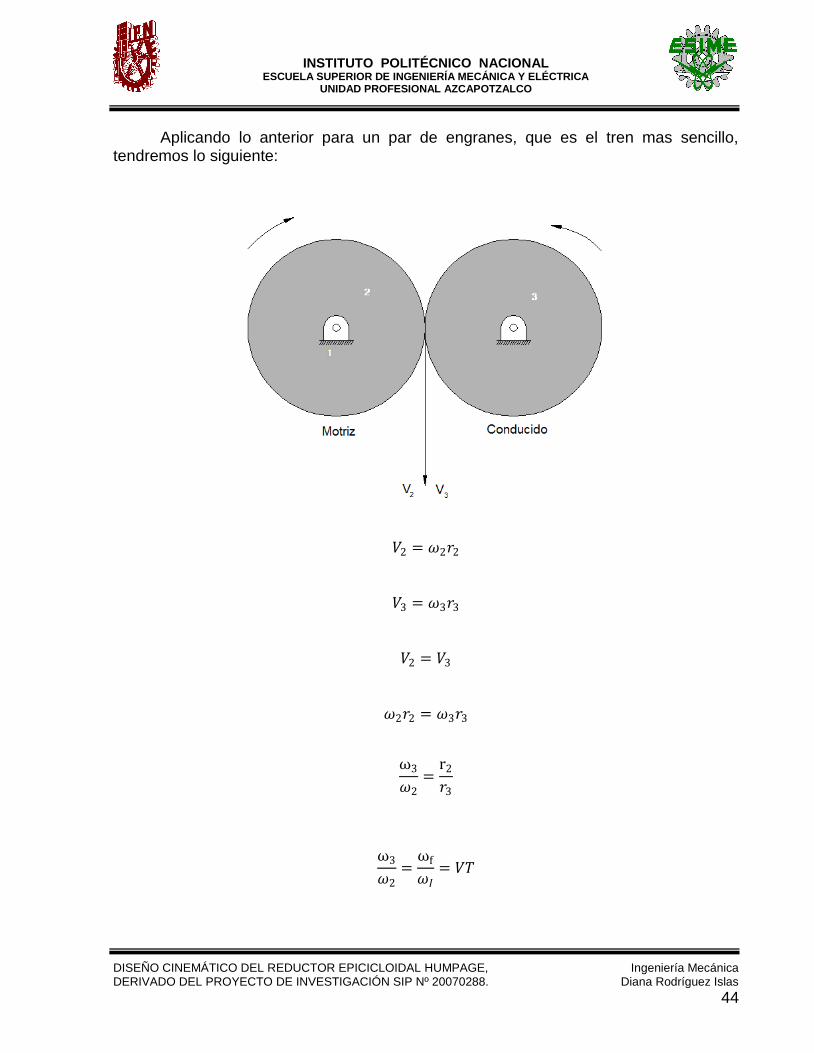
Aplicando lo anterior para un par de engranes, que es el tren mas sencillo, tendremos lo siguiente:
𝑉2 = 𝜔2𝑟2
𝑉3 = 𝜔3𝑟3
𝑉2 = 𝑉3
𝜔2𝑟2 = 𝜔3𝑟3
ω3
𝜔2=
r2
𝑟3
ω3
𝜔2=
ωf
𝜔𝐼= 𝑉𝑇
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
45
𝑉𝑇 =rI
𝑟𝑓
𝑉𝑇 =r2
𝑟1
Paso circular
𝑃𝐶 =𝜋𝑑
𝑁=
𝜋2𝑟
𝑁
𝑃𝐶2 =𝜋2𝑟2
𝑁2
𝑃𝐶3 =𝜋2𝑟3
𝑁3
𝑃𝐶2 = 𝑃𝐶3
𝜋2𝑟2
𝑁2=
𝜋2𝑟3
𝑁3
𝑟2
𝑁2=
𝑟3
𝑁3

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
46
𝑉𝑇 =NI
𝑁𝑓
ωf
𝜔𝐼=
rI
𝑟𝑓=
NI
𝑁𝑓
ωf
𝜔𝐼=
NI
𝑁𝑓
𝜔𝑓 = 𝜔𝐼
NI
𝑁𝑓
Para el caso de un ordinario simple que tenga más dos engranes el valor del tren quedara establecida de siguiente forma:
2,3
𝑉𝑇 =𝑊3
𝑊2=
𝑁2
𝑁3

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
47
3,4
𝑉𝑇 =𝑊4
𝑊3=
𝑁3
𝑁4
4,5
𝑉𝑇 =𝑊5
𝑊4=
𝑁4
𝑁5
𝑊3
𝑊2 𝑊4
𝑊3 𝑊5
𝑊4=
𝑁2
𝑁3 𝑁3
𝑁4 𝑁4
𝑁5
𝑊5
𝑊2=
𝑁2
𝑁5= 𝑉𝑇
𝑉𝑇 =𝑁𝐼
𝑁𝐹
𝑊𝐹
𝑊𝐼=
𝑁𝐼
𝑁𝐹
𝑊𝐹 = 𝑊𝐼
𝑁𝐼
𝑁𝐹

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
48
Para el caso de un tren ordinario compuesto, el valor del tren queda determinado de la siguiente forma:
2,3 𝑊3
𝑊2=
𝑁2
𝑁3
4,5
𝑊5
𝑊4=
𝑁4
𝑁5
5,6
𝑊6
𝑊5=
𝑁5
𝑁6
7,8
𝑊8
𝑊7=
𝑁7
𝑁8
𝑊3
𝑊2 𝑊5
𝑊4 𝑊6
𝑊5 𝑊8
𝑊7=
𝑁2
𝑁3 𝑁4
𝑁5 𝑁5
𝑁6 𝑁7
𝑁8
𝑊8
𝑊2=
𝑁2𝑁4𝑁5𝑁7
𝑁3𝑁5𝑁6𝑁8

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
49
2.4.- REDUCTORES DE VELOCIDAD
Toda máquina cuyo movimiento sea generado por un motor (ya sea eléctrico, de explosión u otro) necesita que la velocidad de dicho motor se adapte a la velocidad necesaria para el buen funcionamiento de la maquina. Además de esta adaptación de velocidad, se deben contemplar otros factores como la potencia mecánica a transmitir, la potencia térmica, rendimientos mecánicos (estáticos y dinámicos).
Esta adaptación se realiza generalmente con uno o varios pares de engranajes
que adaptan la velocidad y potencia mecánica montados en un cuerpo compacto denominado reductor de velocidad aunque en algunos países hispanos parlantes también se le denomina caja reductora.
Clasificación por tipo de engranajes
Los reductores se pueden clasificar por la tipología de sus engranajes, las clasificaciones más usuales son: Sin fin-Corona, engranajes y planetarios.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
50
2.4.1.- Reductores de velocidad de Sin fin-Corona
Es quizás el tipo de reductor de velocidad más sencillo, se compone de una corona dentada, normalmente de bronce en cuyo centro se ha embutido un eje de acero (eje lento), esta corona está en contacto permanente con un husillo de acero en forma de tornillo sin-fin. Una vuelta del tornillo sin fin provoca el avance de un diente de la corona y en consecuencia la reducción de velocidad. La reducción de velocidad de una corona sin fin se calcula con el producto del número de dientes de la corona por el número de entradas del tornillo sin fin. Paradójicamente es el tipo de reductor de velocidad más usado y comercializado a la par que todas las tendencias de ingeniería lo consideran obsoleto por sus sus grandes defectos que son, el bajo rendimiento energético y la irreversibilidad.
2.4.2.- Reductores de velocidad de engranajes
Los reductores de engranajes son aquellos en que toda la transmisión mecánica se realiza por pares de engranajes de cualquier tipo excepto los basados en tornillo sin fin. Sus ventajas son el mayor rendimiento energético, menor mantenimiento y menor tamaño.
2.4.3.- Reductores de velocidad Planetarios
Son reductores de engranajes con la particularidad de que no están compuestos de pares de engranajes si no de una disposición algo distinta: Sobre un cuerpo-corona oscilan un grupo indeterminado de engranajes iguales accionados por un engranaje central llamado solar. Esta especial configuración y según la construcción de los engranajes les da dos posibles particularidades. La primera que la relación de transmisión puede ser exacta, sin decimales, lo que los hace aptos para trabajos de precisión. La segunda es que al tener más puntos de contacto entre engranajes en cada juego de reducción pueden transmitir más potencia. En contrapartida tienen serios problemas de calentamiento.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
51
CAPÍTULO 3
REDUCTOR EPICICLOIDAL HUMPAGE
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
52
3.1.- ELEMENTOS QUE LO COMPONEN.
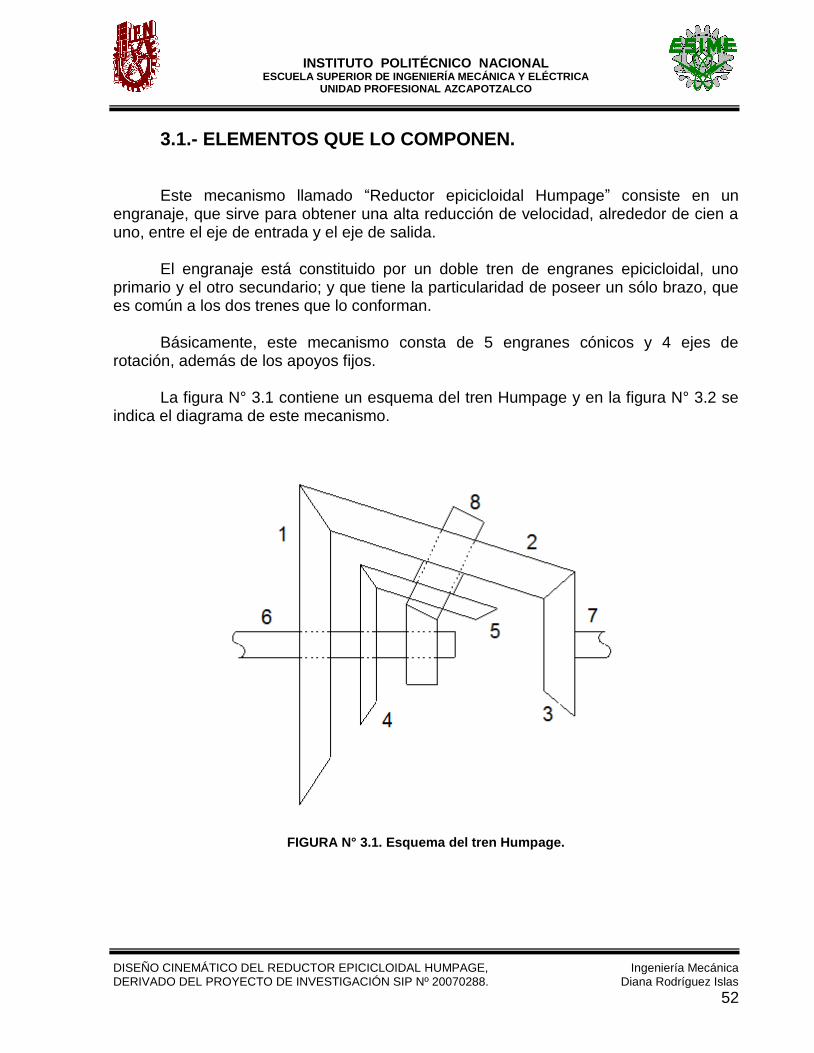
Este mecanismo llamado “Reductor epicicloidal Humpage” consiste en un
engranaje, que sirve para obtener una alta reducción de velocidad, alrededor de cien a uno, entre el eje de entrada y el eje de salida.
El engranaje está constituido por un doble tren de engranes epicicloidal, uno
primario y el otro secundario; y que tiene la particularidad de poseer un sólo brazo, que es común a los dos trenes que lo conforman.
Básicamente, este mecanismo consta de 5 engranes cónicos y 4 ejes de
rotación, además de los apoyos fijos. La figura N° 3.1 contiene un esquema del tren Humpage y en la figura N° 3.2 se
indica el diagrama de este mecanismo.
FIGURA N° 3.1. Esquema del tren Humpage.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
53
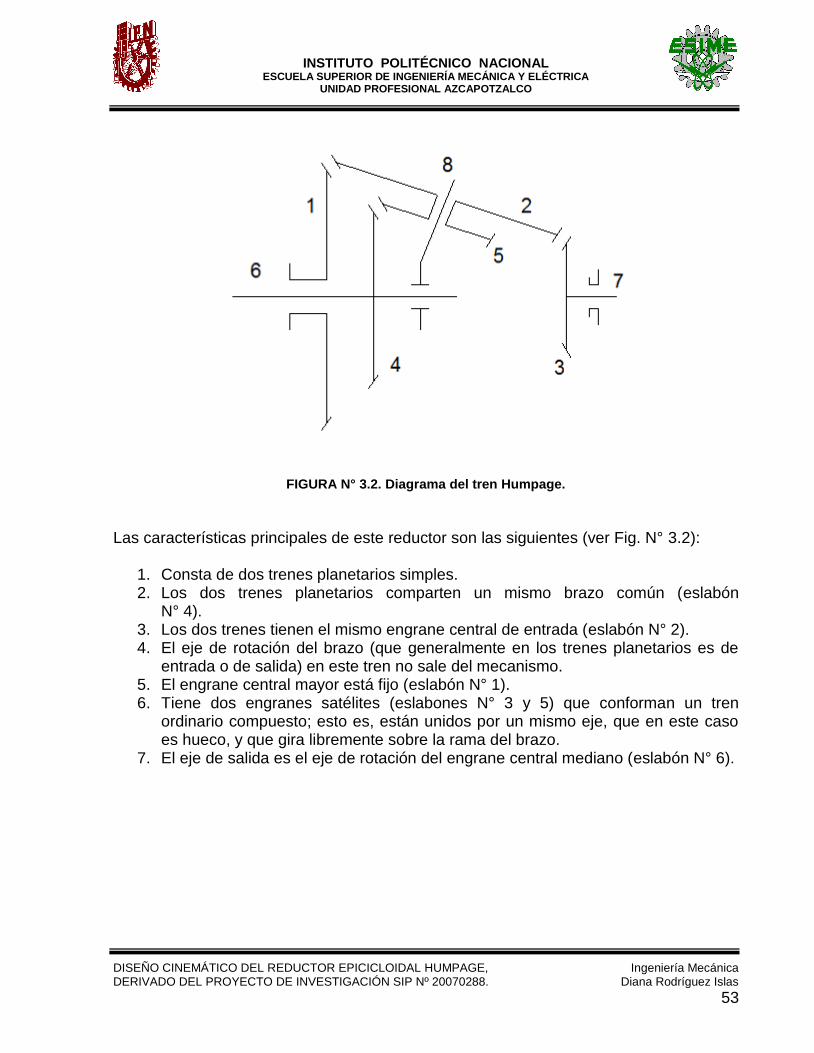
FIGURA N° 3.2. Diagrama del tren Humpage.
Las características principales de este reductor son las siguientes (ver Fig. N° 3.2):
1. Consta de dos trenes planetarios simples. 2. Los dos trenes planetarios comparten un mismo brazo común (eslabón
N° 4). 3. Los dos trenes tienen el mismo engrane central de entrada (eslabón N° 2). 4. El eje de rotación del brazo (que generalmente en los trenes planetarios es de
entrada o de salida) en este tren no sale del mecanismo. 5. El engrane central mayor está fijo (eslabón N° 1). 6. Tiene dos engranes satélites (eslabones N° 3 y 5) que conforman un tren
ordinario compuesto; esto es, están unidos por un mismo eje, que en este caso es hueco, y que gira libremente sobre la rama del brazo.
7. El eje de salida es el eje de rotación del engrane central mediano (eslabón N° 6).

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
54
3.2.- TREN PLANETARIO PRIMARIO.
El primer tren epicicloidal consta de los siguientes elementos. Un engrane cónico central, (eslabón N° 2), que está montado sobre el eje de rotación de entrada. Un engrane cónico central, (eslabón N° 1), que está montado sobre los soportes fijos, por lo cual este engrane no tiene rotación. Un engrane cónico satélite, (eslabón N° 3), que está montado sobre la rama del brazo (eslabón N° 4).
Este compuesto, que es la conexión con el segundo tren epicicloidal, y está en
contacto con los dos engranes centrales.
3.3.- TREN PLANETARIO SECUNDARIO.
El segundo tren epicicloidal lo conforman un engrane cónico central (eslabón N° 2); un engrane cónico central, (eslabón N° 6), que está montado sobre el eje de salida; un engrane cónico satélite (eslabón N° 3) y otro engrane cónico satélite, (eslabón N° 5), que están montados sobre la rama del brazo (eslabón N° 4).
3.4.- FUNCIONAMIENTO DEL HUMPAGE.
El funcionamiento del reductor Humpage es de la siguiente forma (ver Fig. N° 3.1 y N° 3.2). Al girar el eje de entrada adquiere rotación el engrane central 2, el cual le da movimiento al engrane satélite 3, que gira libremente sobre la rama del brazo 4. Sin embargo, el satélite 3 está también conectado al engrane central 1, pero como este engrane está fijo entonces el satélite 3 empieza a “rodar” sobre este engrane central, y el efecto que produce es que el eje del brazo 4 empiece a girar alrededor del eje principal del mecanismo. Todo esto es lo que define el movimiento del primer tren planetario simple.
Una vez que el brazo adquirió su movimiento, el funcionamiento del segundo tren
planetario simple es el siguiente. Al girar el engrane central 2 le transmite movimiento al engrane satélite 3 y éste, a través de su eje hueco de rotación, le imprime la misma velocidad al engrane satélite 5, porque estos dos engranes conforman un tren ordinario compuesto. Como el eje de rotación del engrane satélite 5 es la rama del brazo 4, el cual ya adquirió velocidad por medio del primer planetario, entonces este satélite 5 empieza a rodar sobre el engrane central 6. Pero debido a que la relación —o proporción— entre dientes (Valor del Tren) entre el satélite 3 y el central 1 no es la misma que entre el satélite 5 y el central 6, entonces se produce un efecto de “arrastre” del satélite 5 sobre el central 6, con la consiguiente producción de movimiento de rotación en el engrane 6, lo cual nos proporciona la velocidad de su eje, que es el eje de salida de todo el mecanismo. Cabe aclarar que en cualquier tren planetario simple
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
55
siempre se tienen tres ejes de rotación: el del primer engrane central, el del brazo, y el del segundo engrane central; independientemente del caso particular de que alguno de los engranes centrales no se mueva.
En consecuencia, teóricamente, para dos trenes planetarios simples, como es el
caso del Humpage, deberíamos tener seis ejes de rotación, pero sólo tenemos dos: el de entrada, que es el que le da movimiento al engrane central inicial 2, del primer tren planetario simple, y el eje de salida, que corresponde al movimiento del engrane central final 6, del segundo tren planetario simple. Entonces ¿qué pasa con los otros cuatro ejes? Pues como ya se describió en el funcionamiento, el eje de rotación del engrane central 2, es el mismo tanto para el primero como para el segundo planetario. La rama del brazo 4 y su eje de rotación es el mismo, tanto para el primer planetario como para el segundo y, además, este eje no sale del mecanismo. Y, por último, el eje de rotación del engrane central 1, del primer planetario, “no existe” porque este engrane está fijo. Así que, teóricamente, sí tenemos los 6 ejes: dos veces el eje del engrane central 2 (que es el eje de entrada), dos veces el eje del brazo 4 (que no sale del mecanismo), el eje del central 1 (que no se mueve), y el eje del engrane central 6 (que es el eje de salida).
Más adelante, en el punto N° 4.2, se muestran los planos y fotografías de las
piezas y conjunto del mecanismo.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
56
CAPÍTULO 4
CÁLCULO CINEMÁTICO DEL REDUCTOR

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
57
Después de haber establecido en el capítulo anterior las características del Reductor Humpage, ahora se realizará el cálculo cinemático de dicho reductor, que es el tema central de esta tesis.
4.1.- ANÁLISIS CINEMÁTICO DEL REDUCTOR HUMPAGE.
4.1.1.- Velocidad teórica de salida.
Como ya se estableció, el reductor Humpage es tren de engranes combinado, que consta de dos trenes planetarios con eslabones comunes; estos trenes son los que ya hemos llamado tren planetario primario y tren planetario secundario.
Para determinar la velocidad teórica de salida habrá que resolver primero el tren
primario, y después el tren secundario. A continuación se establece la ecuación general de un tren planetario:
𝑉𝑇 =𝜔𝑓−𝜔𝑏
𝜔 𝑖−𝜔𝑏 Ecuación 4.1
En esta ecuación es el Valor del Tren, es la velocidad de salida, es la
velocidad del brazo y es la velocidad de entrada. Para que quede más claro a qué eslabones nos referiremos, a continuación se vuelve a mostrar el diagrama del mecanismo.
FIGURA N° 3.2 (repetida). Diagrama del tren Humpage.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
58
Como ya se indicó en el capítulo anterior, el tren de engranes primario consta de los eslabones 1-2-3-4. Para este tren primario tendremos:
𝜔𝑓 = 𝜔1 𝜔𝑏 = 𝜔8 𝜔𝑖 = 𝜔3
Sustituyendo estas variables en la ecuación 4.1 tendremos:
𝑉𝑇 =𝜔1−𝜔8
𝜔3−𝜔8 Ecuación 4.2
Pero como el engrane 1 está fijo, su velocidad vale cero, o sea: 𝜔1= 0 Sustituyendo en 4.2 tendremos:
𝑉𝑇 =−𝜔8
𝜔3−𝜔8 Ecuación 4.3
El Valor del Tren en un engranaje planetario es el mismo si se mueve o si no se
mueve el brazo. Para facilitar el cálculo, supondremos que el brazo no se mueve en el tren primario, por lo que este tren se convierte en un tren ordinario simple.
Para un tren ordinario simple, el Valor del tren está dado por la ecuación:
𝑉𝑇 =𝑁𝑖
𝑁𝑓 Ecuación 4.4
En esta ecuación 𝑁𝑖 es el número de dientes del engrane inicial y 𝑁𝑓 es el
número de dientes del engrane final. Para el tren primario tendremos:
𝑁𝑖 = 𝑁3 y 𝑁𝑓 = 𝑁1
Sustituyendo en la ecuación anterior, tendremos:
𝑉𝑇 =𝑁3
𝑁1 Ecuación 4.5

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
59
En la ecuación general de un tren planetario, cada uno de los valores que se sustituyan deben llevar un sigo que defina el sentido de rotación de las velocidades angulares; pero como esta ecuación también involucra a la variable 𝑉𝑇 , entonces esta variable, por congruencia, deberá llevar un signo. Si la velocidad inicial y la velocidad final giran (o girarían) en el mismo sentido, cualquiera que sea, el signo será positivo. Si giran (o girarían) en sentidos contrarios, el signo será negativo.
Para nuestro caso, en el tren primario la velocidad inicial y final serían contrarias,
por lo tanto el Valor del Tren será negativo; esto es:
𝑉𝑇 = −𝑁3
𝑁1 Ecuación 4.6
Sustituyendo esta ecuación en la ecuación 4.3, tendremos:
−𝑁3
𝑁1=
−𝜔8
𝜔3−𝜔8 Ecuación 4.7
Como 𝜔3 es la velocidad de entrada, o sea la velocidad inicial que es conocida,
entonces de la ecuación anterior despejamos 𝜔8, que es la velocidad del brazo:
𝜔8 = 𝑁3
𝑁1+𝑁3 𝜔3 Ecuación 4.8
La ecuación anterior nos da la solución del tren planetario primario; o sea, Con
esta ecuación obtenemos la velocidad que tendrá el brazo. Como el brazo es el eslabón común que conecta al tren primario con el tren
secundario, entonces ahora procedemos a resolver el tren secundario. Este tren secundario consta de los eslabones 2-3-4-5-8. Para este tren, las variables de la ecuación general de un tren planetario (ecuación 4.1) serán;
𝜔𝑓 = 𝜔4 𝜔𝑏 = 𝜔8 𝜔𝑖 = 𝜔3
Sustituyendo estas variables en la ecuación 4.1 tendremos:
𝑉𝑇 =𝜔4−𝜔8
𝜔3−𝜔8 Ecuación 4.9

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
60
Suponiendo que el brazo no se mueve en el tren secundario, este tren se convierte en un tren ordinario compuesto, ya que los engranes 2 y 5 están montados sobre un mismo eje hueco, que gira sobre la rama del brazo.
Para un tren ordinario compuesto, el Valor del tren está dado por la ecuación:
𝑉𝑇 =Π𝑚
Π𝑐 Ecuación 4.10
Donde Π𝑚 es el producto del número de dientes de los engranes motrices y Π𝑐
es el producto del número de dientes de los engranes conducidos. Para el tren secundario tendremos que los engranes motrices son 3 y 5, y los
engranes conducidos son 2 y 4, por lo que sustituyendo en la ecuación anterior, tendremos:
𝑉𝑇 =𝑁3𝑁5
𝑁2𝑁4 Ecuación 4.11
Al igual que se consideró para el tren primario, este Valor del Tren deberá llevar
un signo, el cual también será negativo, por lo que tendremos:
𝑉𝑇 = −𝑁3𝑁5
𝑁2𝑁4 Ecuación 4.12
Sustituyendo esta ecuación en la ecuación 4.9, tendremos:
−𝑁3𝑁5
𝑁2𝑁4=
𝜔4−𝜔8
𝜔3−𝜔8 Ecuación 4.13
Como 𝜔8 es la velocidad del brazo, que ya se puede calcular desde el tren primario, entonces la única incógnita que queda es 𝜔4, que es la velocidad de salida del Reductor Humpage. Despejando de la ecuación anterior, tendremos:
𝜔4 = 𝜔8 − 𝜔3 𝑁3𝑁5
𝑁2𝑁4+ 𝜔8 Ecuación 4.14
En la ecuación anterior podría sustituirse el valor de 𝜔8 que se estableció en la
ecuación 4.8, obteniéndose una fórmula general para 𝜔4; sin embargo es más práctico calcular primero el valor numérico de 𝜔8, con la ecuación 4.8, y después sustituir este valor en la ecuación 4.14.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
61
4.1.2.- Propuesta del número de dientes.
Para poder aplicar la ecuación 4.14, para determinar la velocidad de salida, es necesario conocer el número de dientes (N) de cada engrane.
La cantidad de dientes de cada engrane no puede ser arbitraria, ya que los
engranes que estén en contacto, unos con otros, a través de los dientes, deben tener el mismo paso para que puedan engranar. La relación entre el número de dientes, en estos casos, resulta igual a la relación entre los diámetros de los engranes.
Con base en lo anterior, habrá una relación entre dientes en los subconjuntos de
engranes 3-2-1 y 4-5. Dicho de otra manera, dando el valor del número de dientes a los engranes 3 y 5, todos los demás engranes tendrán un número de dientes predeterminado.
Considerando que el engrane de entrada, el N° 3, es pequeño, se le asigna un
valor de 20 dientes. De acuerdo a lo indicado y tomando en cuenta la relación de diámetros de los engranes, se proponen los siguientes valores:
Para el engrane 2: 56 dientes; y para el engrane 1: 76 dientes. En el caso del conjunto 5-4, se propone para el engrane 5: 24 dientes y, por
proporción, el engrane 4 tendrá 35 dientes. Resumiendo, el número de dientes será:
N° de engrane N° de dientes Ni
1 76 N1
2 56 N2
3 20 N3
4 35 N4
5 24 N5

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
62
4.1.3.- Velocidad de salida. Ya teniendo los valores propuestos para el número de dientes, se sustituyen
estos valores en las ecuación 4.8, con lo cual tendremos:
𝜔8 = 𝑁3
𝑁1+𝑁3 𝜔3 Ecuación 4.8
𝜔8 = 20
76+20 𝜔3 por lo que tendremos:
𝜔8 = 0.2083𝜔3 Ecuación 4.15
Sustituyendo los valores de los números de dientes, en la ecuación 4.14, tendremos:
𝜔4 = 𝜔8 − 𝜔3 𝑁3𝑁5
𝑁2𝑁4+ 𝜔8 Ecuación 4.14
𝜔4 = 𝜔8 − 𝜔3 (20)(24)
56 (35)+ 𝜔8 por lo que tendremos:
𝜔4 = 0.2448 𝜔8 − 𝜔3 + 𝜔8 Ecuación 4.16 Si sustituimos la ecuación 4.15 en la ecuación 4.16, tendremos:
𝜔4 = 0.2448 0.2083𝜔3 − 𝜔3 + 0.2083𝜔3 por lo que tendremos:
𝜔4 = 0.01449𝜔3 Ecuación 4.17
𝜔4 ≈ 0.015𝜔3 Ecuación 4.18

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
63
4.1.4.- Relación de reducción. De la ecuación anterior podemos establecer la relación de reducción de todo el
mecanismo; o sea, la proporción que hay entre la velocidad de entrada y la velocidad de salida. Esta relación (aproximadamente) es:
𝜔4
𝜔3= 0.015 Ecuación 4.19
Dicho de otra manera, para darnos una idea de la gran capacidad de reducción
de este tren planetario, podemos establecer la relación:
𝜔4
𝜔3=
15
1000 Ecuación 4.20
Este último resultado significa que por cada mil vueltas del eje de entrada (3), el
eje de salida (4) sólo dará 15 vueltas.
4.2.- DISEÑO CINEMÁTICO DEL REDUCTOR HUMPAGE.
Considerando el análisis cinemático realizado en el punto anterior, se procedió a realizar el diseño cinemático del Reductor Humpage.
4.2.1.- Planos de los eslabones.
En las siguientes páginas se muestran los planos técnicos de cada una de las piezas que conforman el mecanismo.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
64

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
65

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
66

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
67

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
68

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
69

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
70

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
71

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
72

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
73
Reductor de velocidad Humpage en Inventor Desing

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
74

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
75

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
76

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
77

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
78

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
79
4.2.2.- Fotografías.
A CONTINUACIÓN SE MUESTRAN FOTOGRAFÍAS DE CADA COMPONENTE
Y DEL CONJUNTO
FIG. 1. ENGRANE N° 1.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
80
FIG. 2. ENGRANES N° 3 Y 5.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
81
FIG. 3. ENGRANE N° 2.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
82
FIG. 4. ENGRANE N° 6.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
83
FIG. 5. REDUCTOR HUMPAGE, YA ENSAMBLADO.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
84
RESULTADOS
Y
CONCLUSIONES

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
85
RESULTADOS
Los resultados alcanzados son satisfactorios. Se realizó el análisis cinemático del Reductor Humpage, se hizo la propuesta del número de dientes de los engranes y utilizando la metodología para el cálculo cinemático de los trenes planetarios, quedó establecido, en esta tesis, el diseño cinemático del Reductor Humpage. Además, se diseñaron los elementos que conforman el mecanismo, y este diseño se utilizó para producir un prototipo del mecanismo.
Por lo anterior, no sólo se lograron los objetivos propuestos al inicio de este
trabajo, sino que se rebasaron a tal grado que se cuenta con un prototipo del reductor.
CONCLUSIONES
Dentro de la gran variedad de mecanismos que hay, los trenes de engranes son de gran utilidad porque nos permiten trasladar el movimiento de rotación de un eje a otro; pero además, nos dan la posibilidad de variar el valor de la velocidad. El tren Humpage, cuyo diseño cinemático se analizó en este trabajo nos da la característica de lograr una gran variación de la velocidad, con una reducción casi de 100 a 1.
El hacer el análisis cinemático de este tren de engranes fue muy interesante y
provechoso, ya que me permitió, por un lado, aprender la forma correcta de calcular las velocidades en los trenes planetarios. Y, por otro lado, también aprendí a establecer y desarrollar una metodología para resolver problemas de este tipo, lo cual seguramente será aplicable en la solución de problemas técnicos y de ingeniería de casi cualquier tipo.

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
86
BIBLIOGRAFÍA
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
DISEÑO CINEMÁTICO DEL REDUCTOR EPICICLOIDAL HUMPAGE, DERIVADO DEL PROYECTO DE INVESTIGACIÓN SIP Nº 20070288.
Ingeniería Mecánica Diana Rodríguez Islas
87
Calero y Carta. FUNDAMENTOS DE MECANISMOS Y MÁQUINAS PARA
INGENIEROS. Editorial: Mc Graw Hill. Carrizosa y Rivera. INTRODUCCIÓN A LOS MECANISMOS. Editorial: IPN. Dijksman. CINEMÁTICA DE MECANISMOS. Editorial: LIMUSA. Erdman y Sandor. DISEÑO DE MECANISMOS. ANÁLISIS Y SÍNTESIS.
Editorial: Prentice hall. Guillet. CINEMÁTICA DE MÁQUINAS. Editorial: CECSA. Kozhevnikov. MECANISMOS. Editorial: Gustavo Hill. Mabie y Reinholtz. MECANISMOS Y DINÁMICA DE MAQUINARIA. Editorial:
LIMUSA-IPN. Nieto Nieto. SÍNTESIS DE MECANISMOS. Editorial. A.C. Madrid. Palacios. Título: ANÁLISIS Y SÍNTESIS DE MECANISMOS. Tomo I y II.
Editorial: IPN. Shigley. ANÁLISIS CINEMÁTICO DE MECANISMOS. Editorial: Mc Graw Hill.



![Manual de...PDF Xime[1]](https://cdn.vdocuments.mx/doc/165x107/5571fd1e4979599169987a17/manual-depdf-xime1.jpg)



