
© GMV, 2006 Property of GMV
All rights reserved
GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design
3rd ESA Workshop on Astrodynamics Tools and Techniques
Jesús Gil-Fernández
Carlos Corral van Damme

10/05/06 Page 2GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
1. Introduction
2. Direct Methods
3. Indirect Methods
4. Hybrid Methods
5. Conclusions
GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design
© GMV, 2006 Property of GMV
All rights reserved
Introduction
GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design

10/05/06 Page 4GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
Maturity of EP as main propulsion in interplanetary missions
Deep Space 1 (1998) SMART-1 (2003) Hayabusa/MUSES-C (2003)
Trade off at early stage of mission design
Chemical (impulsive) vs. electrical (low thrust)
Conversion of impulsive big delta-V into finite burns
Optimization of thrust direction & burns duration
Motivation
Deep Space 1 (credits JPL)
10/05/06 Page 5GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
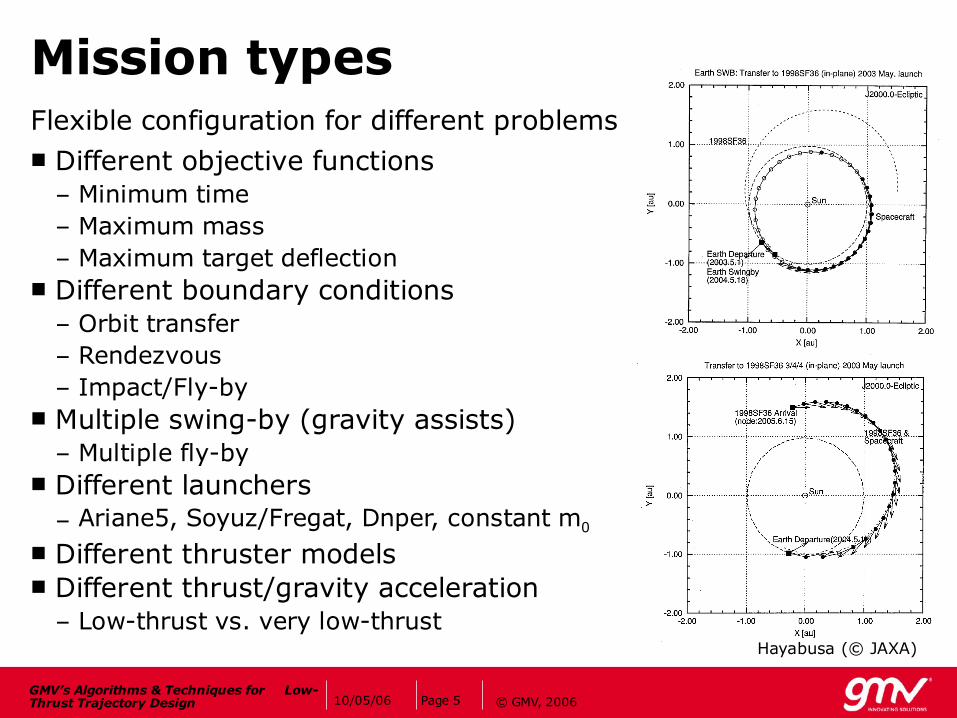
Flexible configuration for different problems Different objective functions
– Minimum time– Maximum mass– Maximum target deflection
Different boundary conditions– Orbit transfer– Rendezvous– Impact/Fly-by
Multiple swing-by (gravity assists)– Multiple fly-by
Different launchers– Ariane5, Soyuz/Fregat, Dnper, constant m0
Different thruster models Different thrust/gravity acceleration
– Low-thrust vs. very low-thrust
Mission types
Hayabusa (© JAXA)

10/05/06 Page 6GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
Different approaches to cope with the different mission types Different optimization methods
– Direct, Indirect, Hybrid Different types of initial guess Different NLP methods
– Gradient-based vs. Non-gradient– Separate objective&constraints vs.
Penalty function All combinations of free/fixed initial &
final times– Trajectory decomposed into sub-arcs
Dynamics – Cartesian coor. and orbital elements– Forward and backward propagation– Switching function vs. fixed burns
duration
Methodology
Bepi Colombo

© GMV, 2006 Property of GMV
All rights reserved
Direct Methods
GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design

10/05/06 Page 8GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
Find the extreme of objective function fulfilling constraints Finite set of variables and constraints Variety of methods for discretization
– Transcription– Collocation– Pseudo-spectral
Solve the resulting NLP problem– Sequential Quadratic Programming
• Line search– Simplex– Genetic Algorithms
Main advantages (vs. indirect)– Higher convergence radius
• Less number of equations• Lower sensitivity to initial guess
– Less problem dependent formulation
Overview
© Mathworks
© AIAA (1990)

10/05/06 Page 9GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
Solves two-point BVP Maximum final mass Optimal thrust direction & magnitude
Methodology Global search
– Shape-based technique: • Exponential sinusoid (Petropoulos)
– Genetic Algorithms– Initial guess for local search
Local optimization– Direct transcription– Available NLP solvers
• Simplex (Nelder-Mead)• SNOPT• Matlab optimization toolbox algorithms
– Solves thrust level constraint
inilow (1/2)
Earth – Temple1

10/05/06 Page 10GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
Optimization scheme
inilow (2/2)
Global Search: Shape Based Technique
Genetic Algoritms
Out-Of -PlaneIn-Plane
Trajectory Refinement
Direct Transcription Local Optimiser
Simplex
Snopt
SOLUTION
Problem Definition

10/05/06 Page 11GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
Optimization of EP closing maneuver Problem statement
– Closing from 35km to –1km in V-bar– Burning time ~25% of transfer time– Constant thrust direction ( V-approach) not
valid• High propellant expenditure due to TCM• Final residual velocity (drift during OD)
Fast & robust optimization required for operational purposes– Cost: propellant mass– Optimization parameters: burn times & thrust
direction (angles expansion)– Dynamics: Hill equations with perturbations
• Final state obtained by quadrature (low numerical sensitivity)
– Gradient method• Good initial guess (impulsive approximation)• Fast computation of derivatives
Validation in realistic simulations– Final error due to navigation uncertainty
Rendezvous maneuvers
Constant thrust direction (optimal impulse)
Starting Point
Starting Point
Optimal thrust direction (finite burn)
10/05/06 Page 12GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
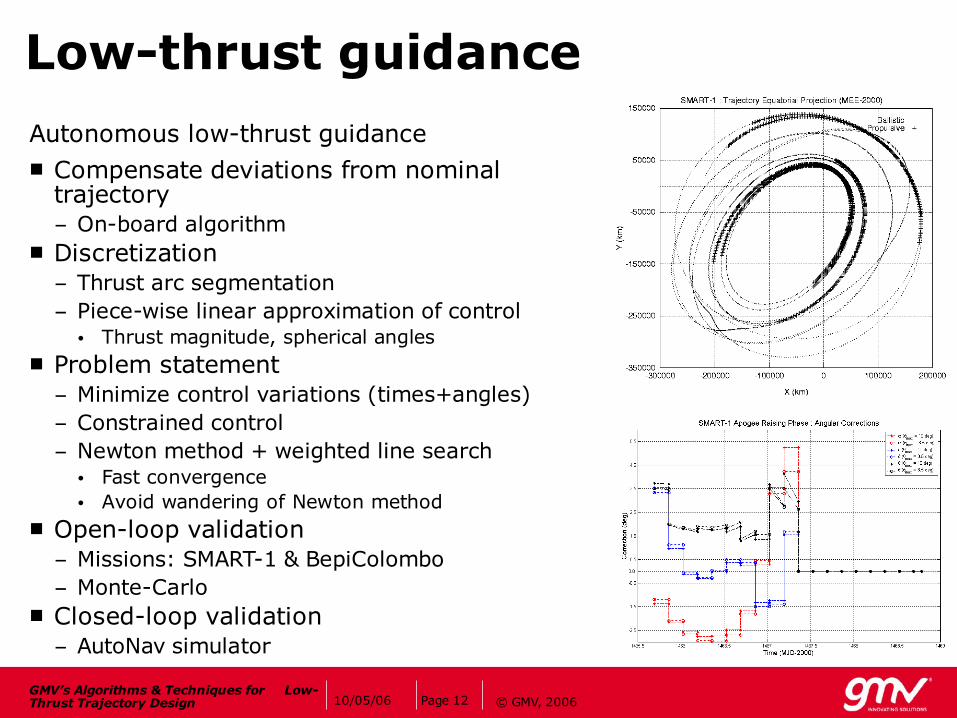
Autonomous low-thrust guidance Compensate deviations from nominal
trajectory– On-board algorithm
Discretization– Thrust arc segmentation– Piece-wise linear approximation of control
• Thrust magnitude, spherical angles Problem statement
– Minimize control variations (times+angles)– Constrained control– Newton method + weighted line search
• Fast convergence• Avoid wandering of Newton method
Open-loop validation– Missions: SMART-1 & BepiColombo– Monte-Carlo
Closed-loop validation– AutoNav simulator
Low-thrust guidance
© GMV, 2006 Property of GMV
All rights reserved
Indirect Methods
GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design

10/05/06 Page 14GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
Find extremal functions (optimal control): fulfill the optimality conditions Based on variational calculus
(Pontryagin, Lawden) New features appear
– Adjoints (or co-states)– Multi-Point BVP– Switching points (due to constraints)
Methods to solve the MPBVP– Multiple shooting– Gradient-Restoration (Miele)– Discretize into a NLP problem
Main advantages (vs. direct)– Reduced set of parameters for control
representation– Reduced # of optimization variables– May give idea of solution structure
Overview
ality) (transve rs )(
ts)cons train (equa lity 0)(con di tion) (initial
cont rol ) (opt imal 0
dyn amics) (adjoint
equa tions ) al (variation ,,
fun ction) (obj ective )(
00
fxx
xx)x(τ
uf
xf
dd
uxfddx
xJ
fT
f
T
T
f
Optimal control formulation of simple problem

10/05/06 Page 15GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
ApplicationDirect transfers to asteroids
Objective function– Impact: max. target major-axis variation– RendezVous: max. final mass
Optimization variables:– Launch and arrival dates– Launcher delta-V– Initial adjoints
• Adjoint-control transformation reduce sensitivity and search space
Thrust structure defined by switching function– High sensitivity of equations & solution
Solver– Global search with genetic algorithm– Local search with simplex

© GMV, 2006 Property of GMV
All rights reserved
Hybrid Methods
GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design

10/05/06 Page 17GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
Try to get the advantages of each method
Direct methods– Direct evaluation of objective function– Less sensitivity of solution– Physical meaning of optimization variables
Indirect methods– Optimal control analytical representation– Reduced set of optimization variables– Optimality conditions assure extremality of solution (at least locally)
Final remark
A suitable formulation allows easy set-up of different problems– Similar physics and numerical issues
Overview

10/05/06 Page 18GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
Transform impulsive mission into low-thrust mitrades provides feasible impulsive trajectory
– Minimum delta-V– Impact with an asteroid– Maximum number of visited asteroids (2 additional flyby)
Applications (1/4)
Hybrid algorithm provides feasible low-thrust trajectory– Impulsive trajectory is initial guess
• A priori knowledge of thrusting structure
– Direct maximization of final mass– Discretization by arc decomposition– NLP solver
• SQP provides fast convergence• Simplex is slower
– Negligible difference (smooth function)

10/05/06 Page 19GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
Pure low-thrust missions
Mission design Reconstruction and/or refinement
Example: Rendezvous with Nereus
Soyuz/Fregat launcher Low-thrust EGA Assumed thrust structure Free dates
– Launch, EGA, arrival
Applications (2/4)

10/05/06 Page 20GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
merpro
Application to optimal abort and re-entry trajectories
Constrained optimization– Optimize mass – Assumed thrust structure
• Multiple arc decomposition
Reduced set of optimization variables for each arc– Optimal thrust direction and burn
duration– Optimal lift direction (re-entry)
NLP solver– Global search: genetic algorithms– Local optimizer: simplex
Applications (3/4)
Abort 2 Atlantic & abort 2 orbit trajectories
Abort 2 Woomera trajectories
10/05/06 Page 21GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
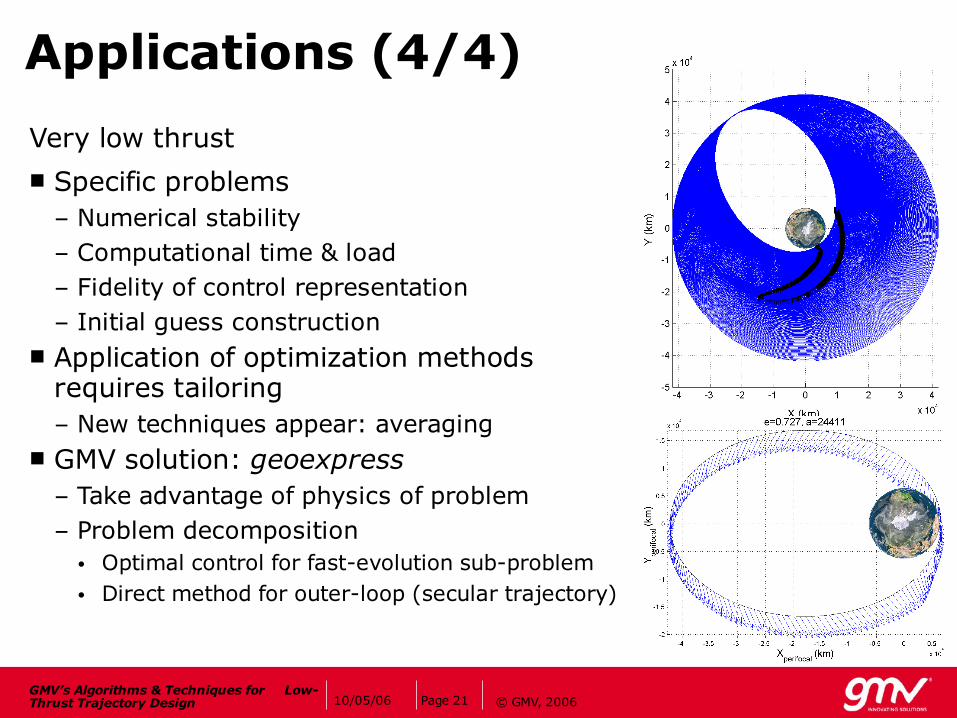
Very low thrust
Specific problems– Numerical stability– Computational time & load– Fidelity of control representation– Initial guess construction
Application of optimization methods requires tailoring– New techniques appear: averaging
GMV solution: geoexpress– Take advantage of physics of problem– Problem decomposition
• Optimal control for fast-evolution sub-problem• Direct method for outer-loop (secular trajectory)
Applications (4/4)

© GMV, 2006 Property of GMV
All rights reserved
Conclusions
GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design
10/05/06 Page 23GMV’s Algorithms & Techniques for Low-Thrust Trajectory Design © GMV, 2006
Preferred optimization method depends on:
Problem Expertise Resources …
Human intervention required for each new problem
Different mission types usually require formulation tailoring Initial guess is usually crucial Solution analysis required
– Usually no a priori existence theorems– Feasibility– Optimality– Convergence criteria
Conclusions

© GMV, 2006 Property of GMV
All rights reserved
Thank you
Jesús Gil-Fernández
Mission Analysis and Advanced Studies
Email: [email protected]
www.gmv.com







