
Camera: optical system
d2 1
thin lens
small angles:
Y
Z
11
Y
21
curvature radius
22
Y
Y
Z
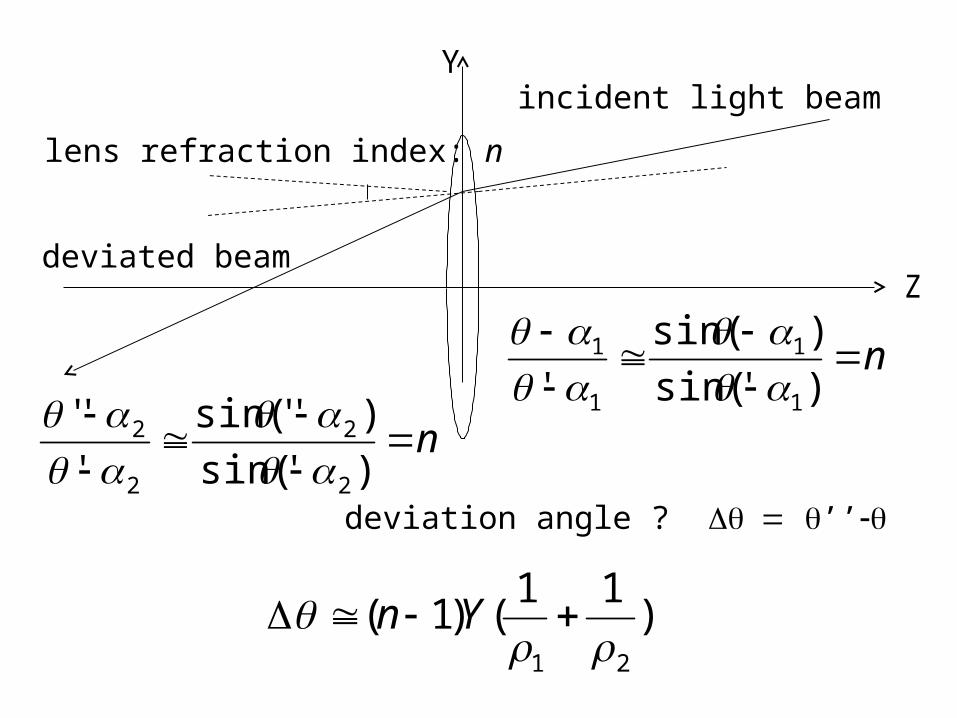
incident light beam
deviated beam
deviation angle ? ’’
lens refraction index: n
)11
()1(21
Yn
n
)'sin(
)sin(
' 1
1
1
1
n
)'sin(
)''sin(
'
''
2
2
2
2
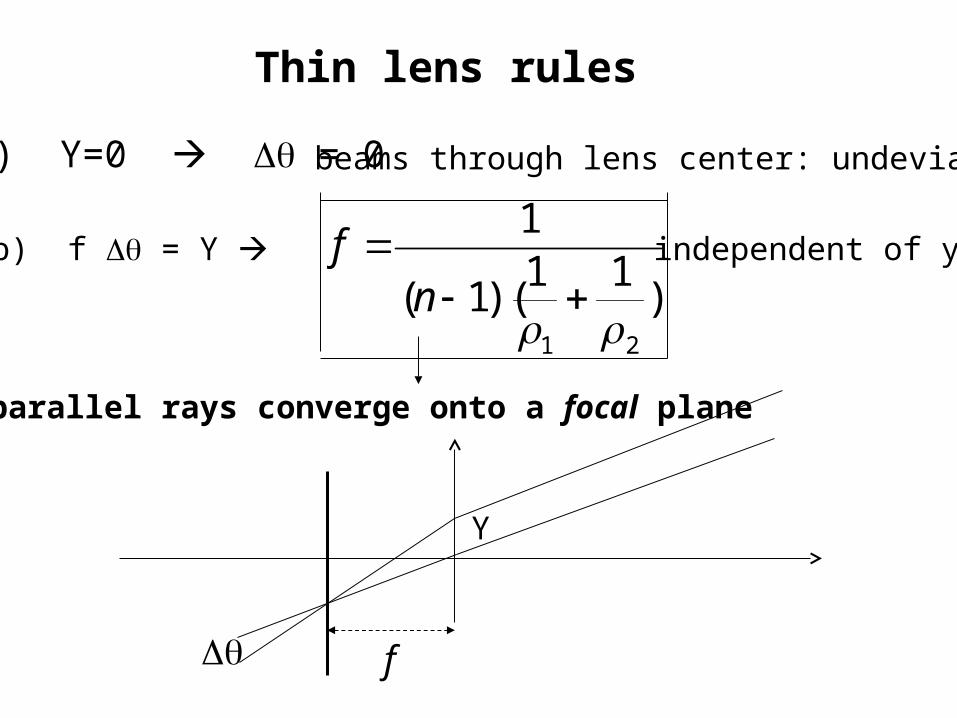
Thin lens rules
a) Y=0 = 0
)11
)(1(
1
21
n
f
f
Y
parallel rays converge onto a focal plane
b) f = Y
beams through lens center: undeviated
independent of y

r
f
Y
h
Where do all rays starting from a scene point P converge ?
Z
r
Y
h
Z
f
fr
Y
h
frZ
111Fresnel law
P
Obs. For Z ∞, r f
O
p?

d
f
a
Z
if d ≠ r …
focussed image:blurring circle) <image resolution
depth of field: range [Z1, Z2] where image is focussed
image plane P
p
O
r (blurring circle)=a (d-r)/r
image of a point = blurring circle

the image of a point P belongs to the line (P,O)
p
P
O
p = image of P = image plane ∩ line(O,P)
interpretation line of p: line(O,p) =locus of the scene points projecting onto image point p
image plane
r fHp: Z >> a

Until here: where goes light ?
But: how much light does reach an image point?
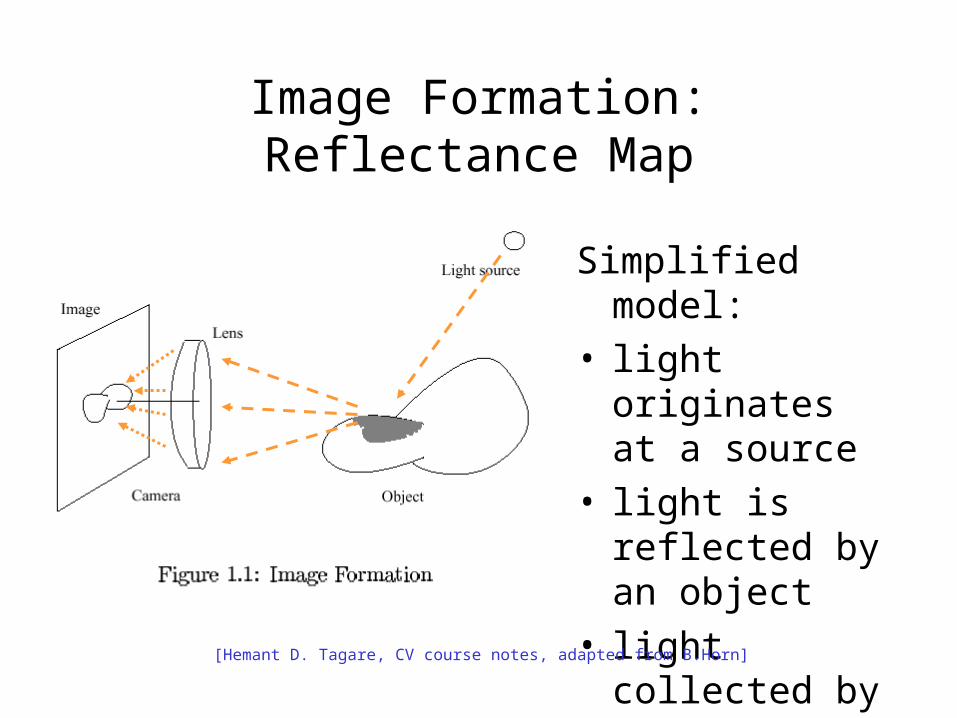
Image Formation: Reflectance Map
Simplified model:• light originates at
a source• light is reflected
by an object• light collected by
camera lens and focused to image
[Hemant D. Tagare, CV course notes, adapted from B.Horn]

The Reflectance Map
dA at P receives flux of d watt:
Irradiance at P:
(watt/meter2,
spatial density of flux at P)
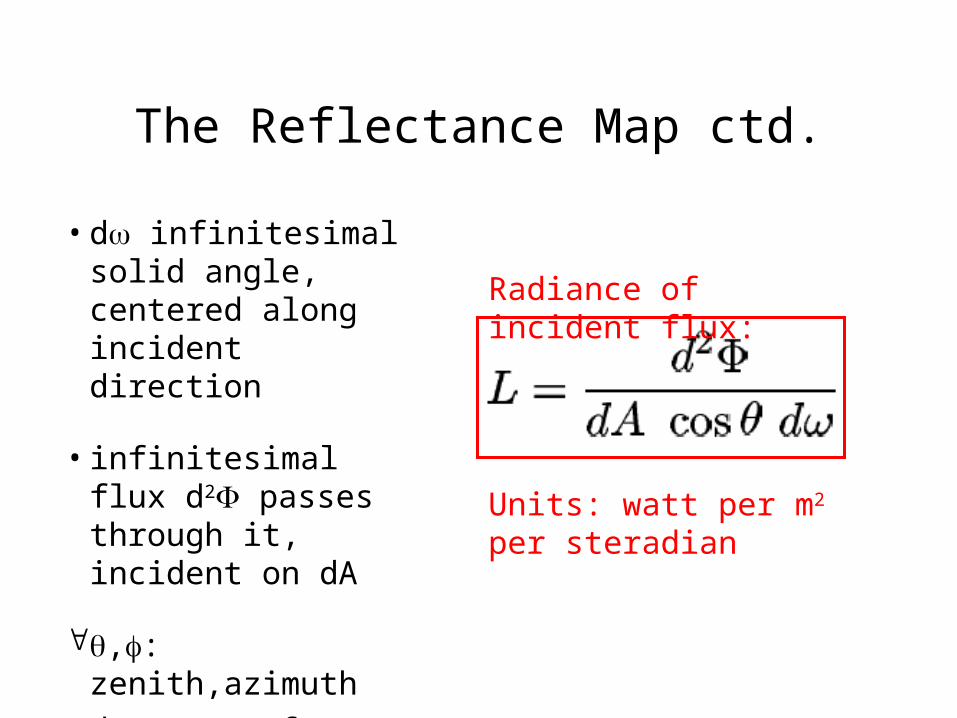
The Reflectance Map ctd.
• d infinitesimal solid angle, centered along incident direction
• infinitesimal flux d2 passes through it, incident on dA
,: zenith,azimuth• dA cos : fore-
shortened area dAf
Radiance of incident flux:
Units: watt per m2 per steradian

The Reflectance Map ctd.
• Object is a point (no area)
• flux d incident on it from solid angle d
Radiant intensity of flux:
units: watt per steradian

Computation of Solid Angle
Solid angle d: • solid angle centered
around direction ,
• spherical geometry: dA = r2 sin dd

Computation of Flux
Flux : • irradiance E and
radiance L are derivatives of flux flux comp. as integral
• L(P,,): radiance along , at any point P of surface
• E(P): irradiance at P: net flux received
by object
and,

Generalization: Reflected Light
• so far: radiance and radiant intensity defined in terms of incident light
• definitions also apply to reflected / emitted light flux d is assumed to have reverse direction (leaves surface)
• radiance of reflected light (dA through d) :

image intensity: proportional to irradiance E
42
2
cos4
),(f
ZLE rrr
where is the radiance reflected towards the lens ),( rrrL
Zf
p
P
O Z
Y
X
c
y
x
Z
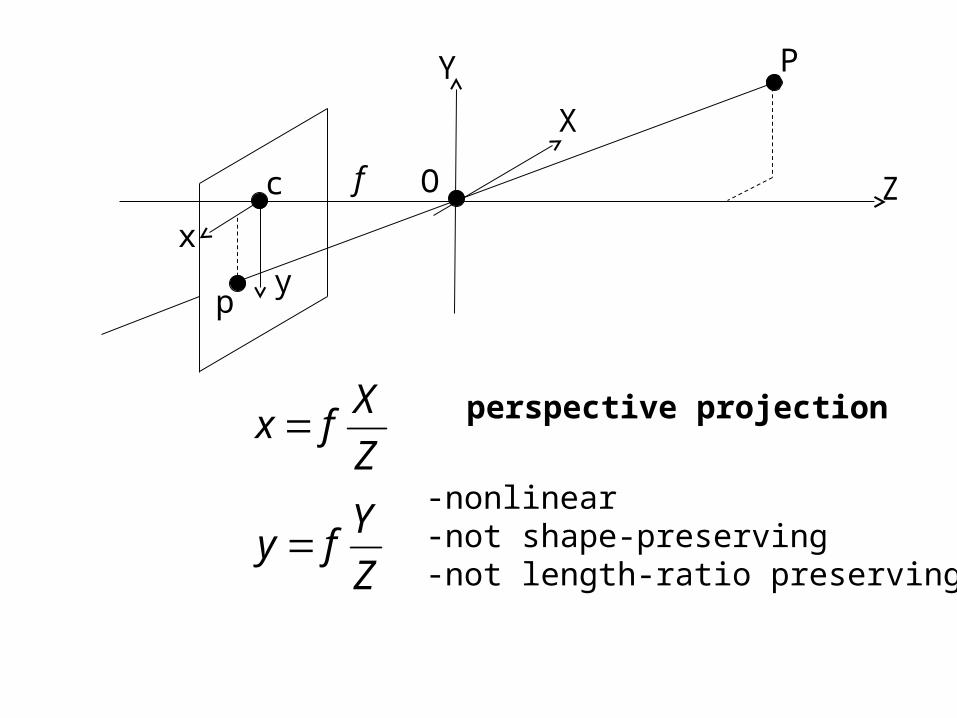
Xfx
Z
Yfy
perspective projection
f
-nonlinear-not shape-preserving-not length-ratio preserving

•Point [x,y]T expanded to [u,v,w]T
•Any two sets of points [u1,v1,w1]T and [u2,v2,w2]T
represent the same point if one is multiple of the other
•[u,v,w]T [x,y] with x=u/w, and y=v/w
•[u,v,0]T is the point at the infinite along direction (u,v)
• In 2D: add a third coordinate, w
Homogeneous coordinates

Transformations
translation by vector [dx,dy]T
scaling (by different factors in x and y)
rotation by angle

Homogeneous coordinates
• In 3D: add a fourth coordinate, t
•Point [X,Y,Z]T expanded to [x,y,z,t]T
•Any two sets of points [x1,y1,z1,t1]T and [x2,y2,z2,t2]T
represent the same point if one is multiple of the other
•[x,y,z,t]T [X,Y,Z] with X=x/t, Y=y/t, and Z=z/t
•[x,y,z,0]T is the point at the infinite along direction (x,y,z)

Transformations
scaling
translation
rotation
Obs: rotation matrix is an orthogonal matrix
i.e.: R-1 = RT

10100
000
000
Z
Y
X
f
f
w
v
u
with
w
ux
w
vy
Scene->Image mapping: perspective transformation
With “ad hoc” reference frames, for both image and scene

Let us recall them
O Z
Y
X
c
y
x
f
scene reference- centered on lens center- Z-axis orthogonal to image plane- X- and Y-axes opposite to image x- and y-axes
image reference- centered on principal point- x- and y-axes parallel to the sensor rows and columns- Euclidean reference







![CURVATURE AND RADIUS OF CURVATURE - …theengineeringmaths.com/wp-content/uploads/2017/09/... · · 2017-09-08CURVATURE AND RADIUS OF CURVATURE ... 3a [–2 cos + ] ... Example](https://cdn.vdocuments.mx/doc/165x107/5abbe2677f8b9ab1118d81dc/curvature-and-radius-of-curvature-and-radius-of-curvature-3a-2-cos.jpg)