
Biomechanics of Walking and Stair Ascent and Descent
D. Gordon E. Robertson, Ph.D.
Biomechanics, Laboratory,
School of Human Kinetics,
University of Ottawa, Ottawa, CANADA
Quantitative Domains
• Temporal–Phases (stance/swing) and events
(foot-strike, toe-off), stride rate
• Kinematic (motion description)– stride length, velocity, ranges of
motion, acceleration
• Kinetic (causes of motion)– ground reaction forces, joint forces,
moments of force, work, energy and power

Temporal Analysis
• Stride time
• Stride rate = 1/rate
• Stride cadence = 120 x rate (b/min)
• Instrumentation–Photocells and timers
–Videography (1 frame = 1/30 second)
–Metronome
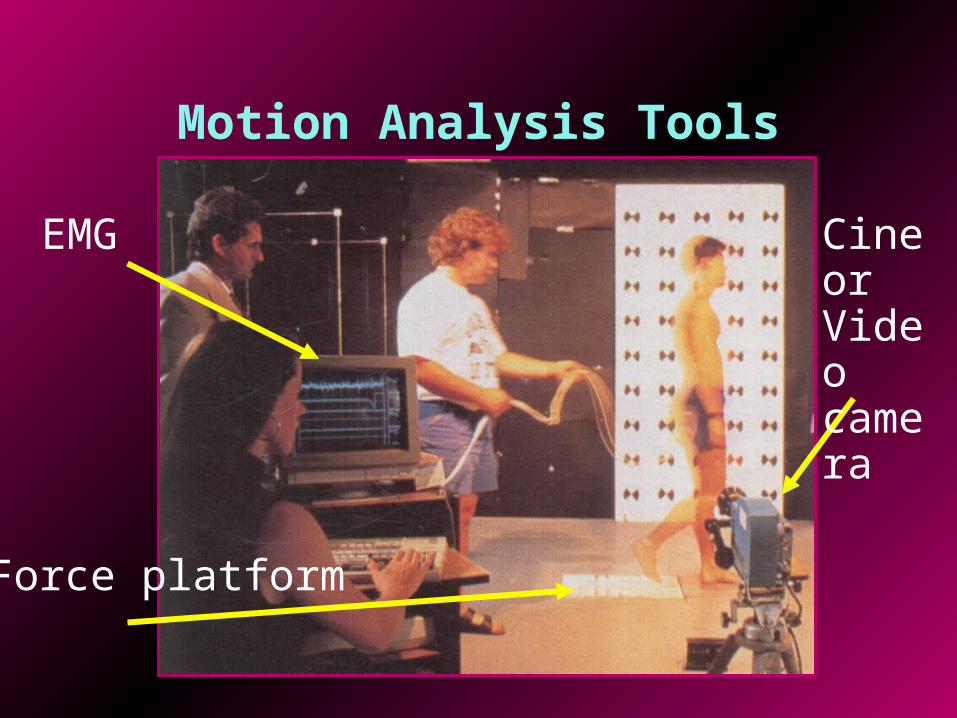
Motion Analysis Tools
EMG
Force platform
Cine or Video camera

Electromyography
Delsys system
Mega system
Noraxon system Bortec system

Kinematic Analysis
• Study of motion without consideration of its causes
• Motion description
• Based on Calculus developed by Newton and Leibnitz
Isaac Newton, 1642-1727
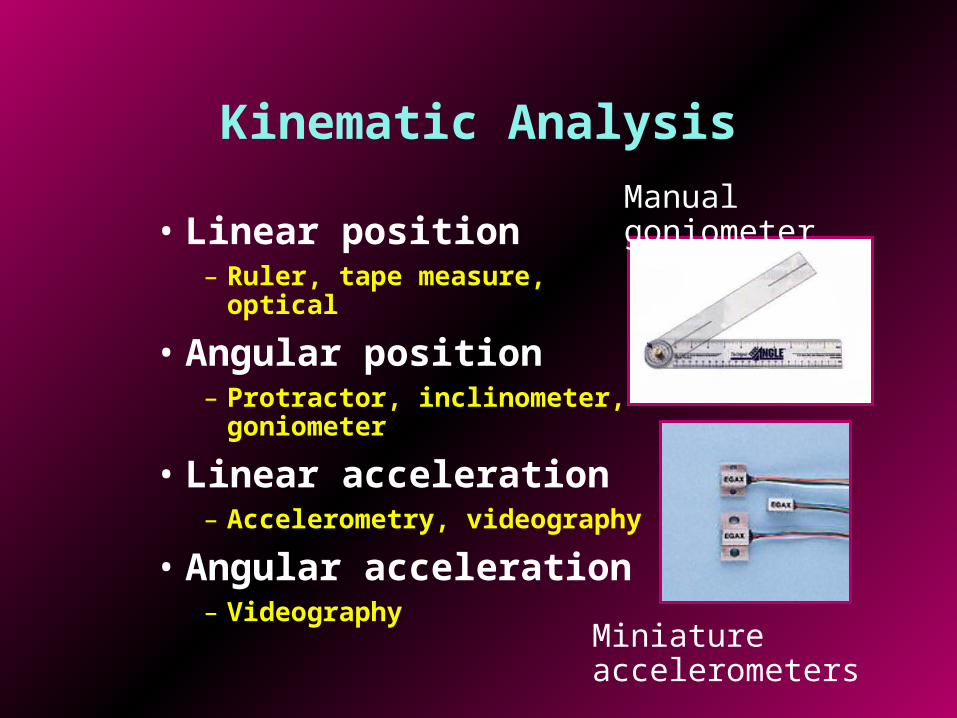
Kinematic Analysis
• Linear position– Ruler, tape measure, optical
• Angular position– Protractor, inclinometer,
goniometer
• Linear acceleration– Accelerometry, videography
• Angular acceleration– Videography
Miniature accelerometers
Manual goniometer

Motion Analysis
• Cinefilm, video or infrared video
• Subject is filmed and locations of joint centres are digitized
High-speed cinecamera
Videocamera
Infrared camera
Computerized Digitizing (APAS)
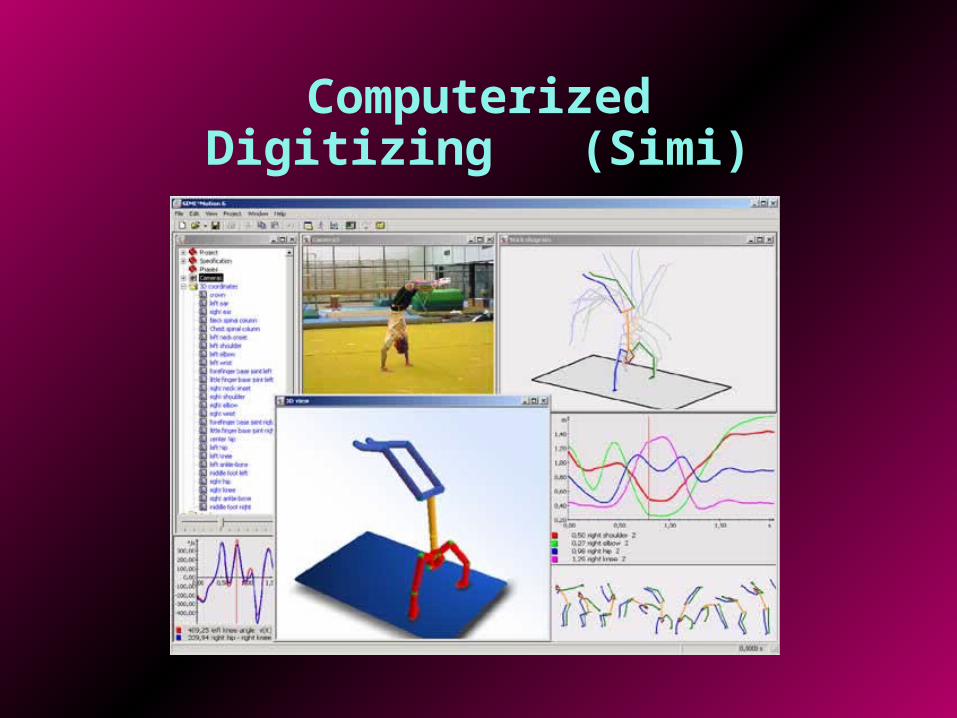
Computerized Digitizing (Simi)
Stick Figure Animation
Walking
Kinetic Analysis
Causes of motion
• Forces and moments of force
• Work, energy and power
• Impulse and momentum
• Inverse Dynamics derives forces and moments from kinematics and body segment parameters (mass, centre of gravity, and moment of inertia)
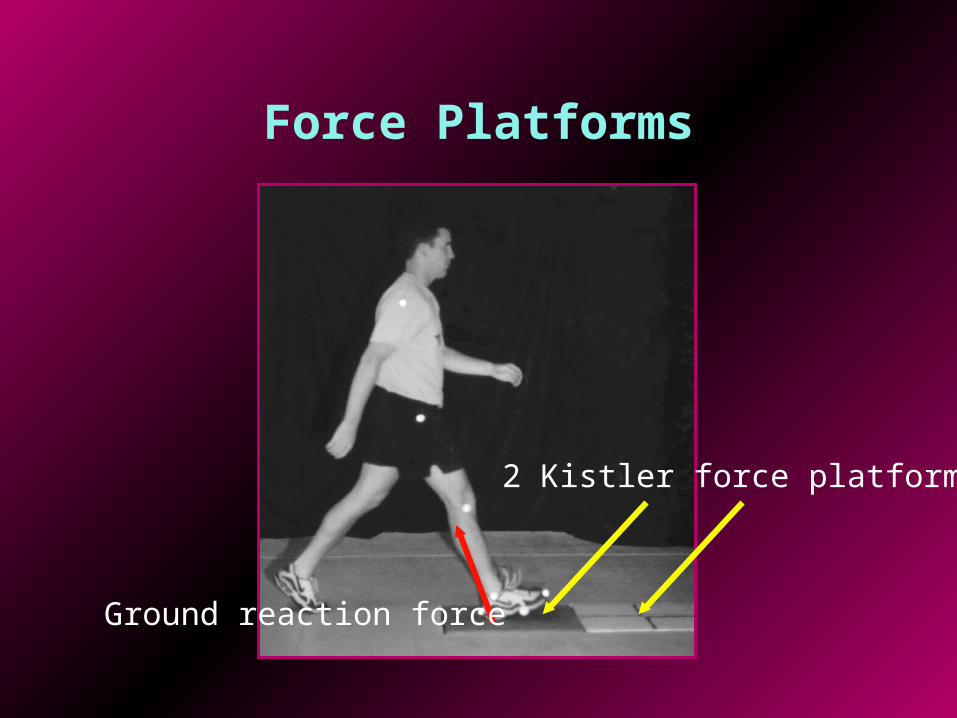
Force Platforms
2 Kistler force platforms
Ground reaction force

Steps for Inverse Dynamics
• Space diagram of the lower extremity
Divide Body into Segments and Make Free-Body Diagrams
• Make free-body diagrams of each segment

Add all Known Forces to FBD
• Weight (W)
• Ground reaction force (Fg)

Apply Newton’s Laws of Motion to Terminal Segment
• Start analysis with terminal segment(s), e.g., foot or hand

Apply Reactions of Terminal Segment to Distal End of Next Segment in Kinematic Chain
• Continue to next link in the kinematic chain, e.g., leg or forearm
Repeat with Next segment in Chain or Begin with Another Limb
• Repeat until all segments have been considered, e.g., thigh or arm

Joint Power Analysis
0.0 0.1 0.2 0.3 0.4Time (s)
-4000.
-2000.
0.
2000.
-300.
0.
300.
-20.
0.
20.
Pow
er
(W)
Mom
en
t (N
.m)
A
ng
ula
r vel.
(/s
)
SR11BJ
ITO CFS CTO IFS
Extending
Flexing
Extensor
Flexor
Concentric
Eccentric
• compute the net moment of force at the joint
• multiply angular velocity and moment of force to obtain the “moment power”
• this is the power produced by the net moment of force acting across the joint
• it is mainly caused by muscle forces
• compute the angular velocity of the joint

Normal Walking Example
• Female subject
• Laboratory walkway
• Speed was 1.77 m/s
• IFS = ipsilateral foot-strike
• ITO = ipsilateral toe-off
• CFS = contralateral foot-strike
• CTO = contralateral toe-off
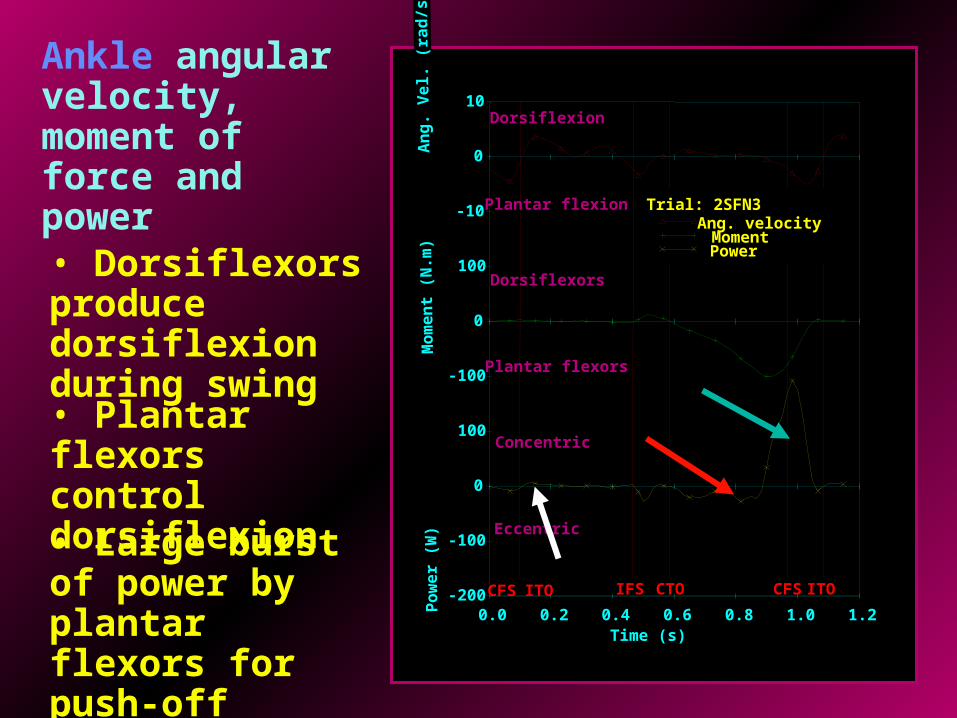
Ankle angular velocity, moment of force and power
• Dorsiflexors produce dorsiflexion during swing
• Plantar flexors control dorsiflexion
• Large burst of power by plantar flexors for push-off 0.0 0.2 0.4 0.6 0.8 1.0 1.2
Time (s)
-200
-100
0
100
-100
0
100
-10
0
10
P
ow
er
(W)
Mo
me
nt
(N.m
)
A
ng
. V
el.
(ra
d/s
)
Trial: 2SFN3Ang. velocityMomentPower
CFS ITO IFS CTO CFS ITO
Dorsiflexion
Plantar flexion
Dorsiflexors
Plantar flexors
Concentric
Eccentric

Knee angular velocity, moment of force and power
• Negative work by extensors to control flexion at push-off
• Burst of power to cushion landing
• Negative work by flexors to control extension prior to foot-strike
0.0 0.2 0.4 0.6 0.8 1.0 1.2Time (s)
-200
-100
0
100
-100
0
100
-10
0
10
P
ow
er
(W)
M
om
en
t (N
.m)
A
ng
. V
el.
(ra
d/s
)
Trial: 2SFN3Ang. velocityMomentPower
CFS ITO IFS CTO CFS ITO
Extension
Flexion
Extensors
Flexors
Concentric
Eccentric

Hip angular velocity, moment of force and power
0.0 0.2 0.4 0.6 0.8 1.0 1.2Time (s)
-200
-100
0
100
-100
0
100
-10
0
10
P
ow
er
(W)
Mo
me
nt
(N.m
)
A
ng
. V
el.
(ra
d/s
)
Trial: 2SFN3Ang. velocityMomentPower
CFS ITO IFS CTO CFS ITO
Flexion
Extension
Flexors
Extensors
Concentric
Eccentric
• Positive work by flexors to swing leg
• Positive work by extensors to extend thigh
• Negative work by flexors to control extension

Solid-Ankle, Cushioned Heel (SACH) Prostheses
Stick Figure Animation
Walking with SACH foot

0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4
Time (s)
-200.
-100.
0.
100.
-100.
0.
100.
-10.
0.
10.
Po
we
r (W
)
Mo
me
nt
(N.m
)
An
gu
lar
ve
l. (
/s)
Ankle angular velocity, moment of force and power of SACH foot prosthesis
• No power produced during push-off
Trial: WB24MH-SAng. velocityNet momentPower
ITO IFS CTO CFS ITO
Dorsiflexing
Plantar flexing
Dorsiflexor
Plantar flexor
Concentric
Eccentric
• Power dissipation during weight acceptance and push-off

FlexFoot Prostheses(Energy Storing)
Recent models
Original model

Stick Figure Animation
Walking with FlexFoot prosthesis
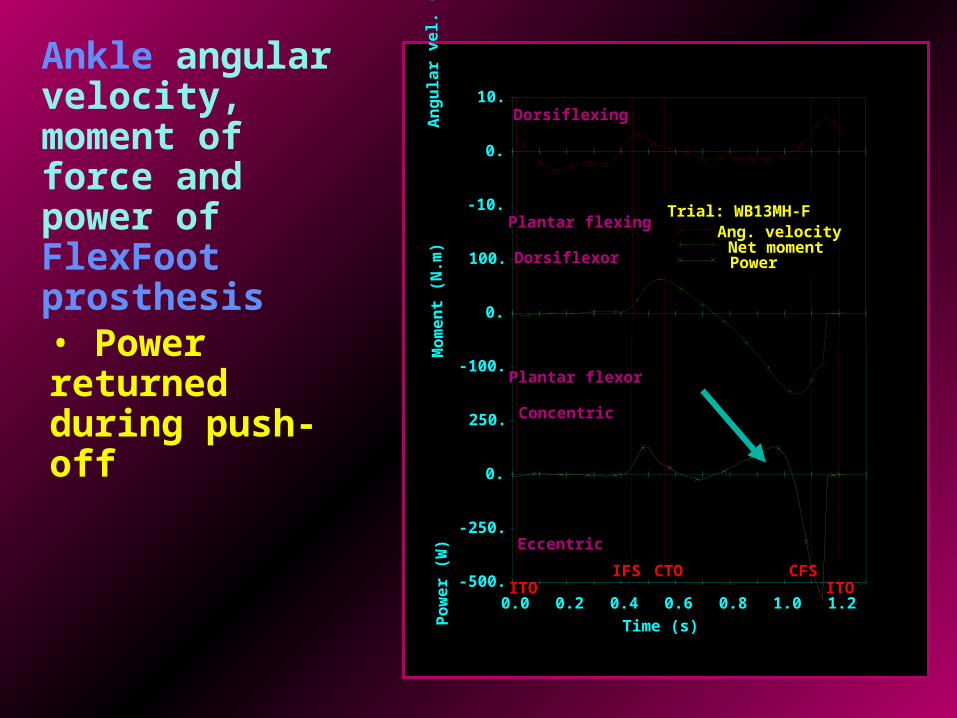
Ankle angular velocity, moment of force and power of FlexFoot prosthesis
• Power returned during push-off
0.0 0.2 0.4 0.6 0.8 1.0 1.2
Time (s)
-500.
-250.
0.
250.
-100.
0.
100.
-10.
0.
10.
Po
we
r (W
)
M
om
en
t (N
.m)
A
ng
ula
r v
el.
(/s
)
Trial: WB13MH-FAng. velocityNet momentPower
ITO IFS CTO CFS ITO
Dorsiflexing
Plantar flexing
Dorsiflexor
Plantar flexor
Concentric
Eccentric
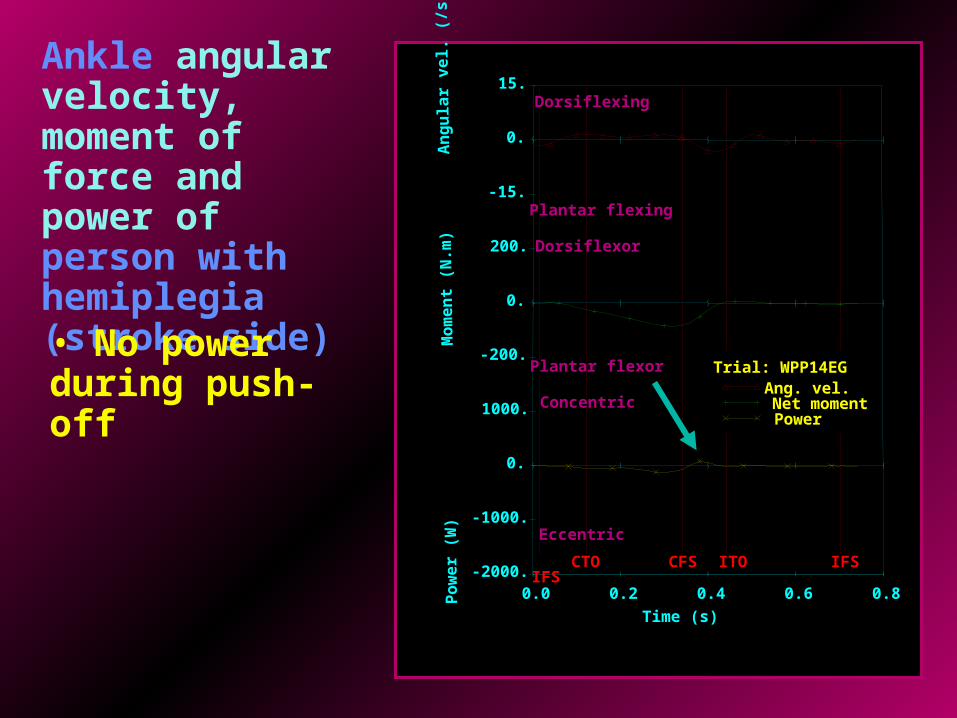
Ankle angular velocity, moment of force and power of person with hemiplegia (stroke side)
• No power during push-off
0.0 0.2 0.4 0.6 0.8
Time (s)
-2000.
-1000.
0.
1000.
-200.
0.
200.
-15.
0.
15.
Po
we
r (W
)
M
om
en
t (N
.m)
A
ng
ula
r ve
l. (
/s)
Trial: WPP14EGAng. vel.Net momentPower
IFS CTO CFS ITO IFS
Dorsiflexing
Plantar flexing
Dorsiflexor
Plantar flexor
Concentric
Eccentric

Ankle angular velocity, moment of force and power of person with hemiplegia (normal side)
• Power at push-off is reduced due to slower gait
0.0 0.2 0.4 0.6 0.8
Time (s)
-2000.
-1000.
0.
1000.
-200.
0.
200.
-15.
0.
15.
P
ow
er
(W)
Mo
me
nt
(N.m
)
An
gu
lar
ve
l. (
/s)
Trial: WPN03EGAng. vel.Net momentPower
IFS CTO CFS ITO IFS
Dorsiflexing
Plantar flexing
Dorsiflexor
Plantar flexor
Concentric
Eccentric
• Negative power is also reduced

Other Gait Patterns
Above-knee Prostheses

Stick Figure Animation
Walking with Terry Fox prosthesis
Support Moment
• Used to quantify stability during stance of gait
• Sum of ankle, knee and hip moments
• Extensors moments are made positive
Msupport = Mankle + Mknee + Mhip
• Should remain positive throughout stance despite loss of function at one or more joints
• Studies have shown that even people with artificial joints produce a positive support moment throughout stance
(Winter, J. Biomech, 13, 923-927, 1980)

Support Moment during Walking
• Support moment is positive throughout stance
• Typically has two peaks one after IFS and one before ITO
0.0 0.2 0.4 0.6 0.8 1.0 1.2Time (seconds)
-200.
-100.
0.
100.
-100.
0.
100.
-100.
0.
100.
-100.
0.
100.
200.
Net
mo
men
ts o
f fo
rce
(N.m
)
Trial: CJWK
IFS CTO CFS ITO
Support moment
Hip extensor
Knee extensor
Ankle extensor• Ankle plantar
flexors are the most important from midstance to toe-off

Laboratory Stairs
• Step height = 24 cm
• Step tread = 30 cm
• Railings = 36 in.
• Height and tread are adjustable
Force platformsForce platforms

Stick Figure Animation
Up One Step from Landing

Up One Step from Landing
• Smaller ankle plantar flexor moment
• Larger than normal knee extensor moment
0.7 0.9 1.1 1.3 1.5 1.7 1.9 2.1 2.3Time (seconds)
-200.
-100.
0.
100.
-100.
0.
100.
-100.
0.
100.
-100.
0.
100.
200.
Net
mo
men
ts o
f fo
rce
(N.m
)
Trial: STLUP7RH
ITO IFS ITO
Support moment
Hip extensor
Knee extensor
Ankle extensor
• Support moment similar to walking

Similarities to Walking
• Double support periods
• Ground reaction forces have double peak
• Cadence similar
• Support moment is similar (always positive with two peaks)

Differences with Walking
• Peak forces slightly higher• Centre of pressure is concentrated under
metatarsals, rarely near heel• Several types of steps
– ascent versus descent– single step up and down– double step up and down– start from or end at a landing
• Step height and tread vary from stairway to stairway
• Railings may be present

Ascent versus Descent
• Descent is more dangerous because if tripping occurs person will fall farther
• Descent is more likely to cause fall since centre of pressure and centre of gravity is closer to edge of stair

Factors Influencing Stability
• Weight
• Size of base of support (hand rails)
• Friction
• Distance from tipping edge
• Height of centre of gravity
• Visual field
• Vestibular system
• Inebriation/drugs
Stick Figure Animation
Down Two Stairs to Landing

Down Two Stairs Forwards
• Larger than normal negative power by ankle plantar flexors after foot-strike (IFS)
0.7 0.9 1.1 1.3 1.5 1.7 1.9 2.1Time (seconds)
-500.
-250.
0.
250.
500.
-250.
0.
250.
-250.
0.
250.
500.
Po
wer
(w
atts
)
Trial: CJRFD
ITO IFS ITO
Hip powers
Knee powers
Ankle powers
• Positive work done after IFS by knee flexors

Possibly Safer Descent
• Descend backwards
• Centre of pressure and centre of gravity are farther from edge of stairs
• If tripping occurs person falls into stairs not down stairs
• Person will be “forced” to use railing
• Problem with seeing next step
• Some people may have problem with neck
Stick Figure Animation
Down Two Steps Backwards

Down Two Stairs Backwards
• No concentric knee power required after IFS
0.5 0.7 0.9 1.1 1.3 1.5 1.7 1.9 2.1Time (seconds)
-500.
-250.
0.
250.
500.
-250.
0.
250.
-250.
0.
250.
500.
Po
wer
(w
atts
)
Trial: CJLBD
ITO IFS ITO
Hip powers
Knee powers
Ankle powers
• Larger than normal negative power by ankle plantar flexors after foot-strike (IFS)
• No push-off power needed from ankle

What’s Next
• Modify rise and tread• At-risk subjects
– Elderly– Infants– Disabled– Distracted– Prostheses– Robots
• Ramps versus stairs– Angle of ramp– Surface friction
• Cambered surfaces
Questions?
Answers?
Comments?







