donji (vozni) postroj -...
TRANSCRIPT

Donji (vozni) postrojDonji (vozni) postrojSistem za oslanjanje, točkovi, sistem za upravljanje, sistem za kočenje, noseća konstrukcija.

Donji (vozni) postrojDonji (vozni) postrojSistem za oslanjanje, točkovi, sistem za upravljanje, sistem za kočenje, noseća konstrukcija.
Osnovni zadaci:•kretanje vozila,•bezbednost (aktivna): prenos sila između točkova i podloge - prijanjanje•promena pravca kretanja,•kočenje,•ubrzanje,•ubrzanje,•udobnost: ublažavanje udara, vibracija i prigušenje oscilacija, sprečavanje prevremenih oštećenja i skraćenja veka trajanja usled dinamičkih opterećenja.
Dodatni zahtevi:•vek trajanja,•pogodnost za održavanje,•što niža cena,•posebne funkcije: podešavanje visine tela vozila od tla (ručno ili automatski), podizanje neopterećenih osovina i sl.

Sistem za oslanjanjeSistem za oslanjanjeZadaci:• vezivanje točkova sa nosećom konstrukcijom vozila - prijem sila• ublažavanje udara i oscilacija• obezbeđivanje dobrog kontakta pneumatika sa podlogom• održavanje kinematike točkova• održavanje stabilnosti kretanja vozila•Osnovni elementi:
• mehanizam za vođenje točka ili • mehanizam za vođenje točka ili cele osovine (3)
• elastični elementi (4)• prigušni elementi (5)

Sistem za oslanjanjeSistem za oslanjanje
Motorno vozilo je složen dinamički sistem sa više masa elastično povezanih na koje deluje nepravilna (stohastička) pobuda prilikom kretanja vozila.
Ono što utiče na elemente vozila i što osećaju putnici su ubrzanja koja tom prilikom nastaju (linearna u tri tom prilikom nastaju (linearna u tri pravca i ugaona oko tri ose).

Elasti čni elementiElasti čni elementi
Elastični oslonci prigušuju varijacije vertikalnih sila koje sa točkova prenose na telo vozila pri kretanju po neravnoj podlozi.Kompromis između male krutosti (udobnost) i velike krutosti (mala promena geometrije sa promenom opterećenja na točku)
1000 kg
75 kg
1000 kg

Elasti čni elementiElasti čni elementi
Elastični oslonci prigušuju varijacije vertikalnih sila koje sa točkova prenose na telo vozila pri kretanju po neravnoj podlozi.Kompromis između male krutosti (udobnost) i velike krutosti (mala promena geometrije sa promenom opterećenja na točku)
1000 kg
4 x 68 + 75 kg
1000 kg

Elasti čni elementiElasti čni elementi
Elastični oslonci prigušuju varijacije vertikalnih sila koje sa točkova prenose na telo vozila pri kretanju po neravnoj podlozi.Kompromis između male krutosti (udobnost) i velike krutosti (mala promena geometrije sa promenom opterećenja na točku)
1000 kg
4 x 68 + 75 kg
50 kg 1000 kg50 kg

Elasti čni elementiElasti čni elementi
Elastični oslonci prigušuju varijacije vertikalnih sila koje sa točkova prenose na telo vozila pri kretanju po neravnoj podlozi.
• spiralne opruge
Elasti čni elementiElasti čni elementi
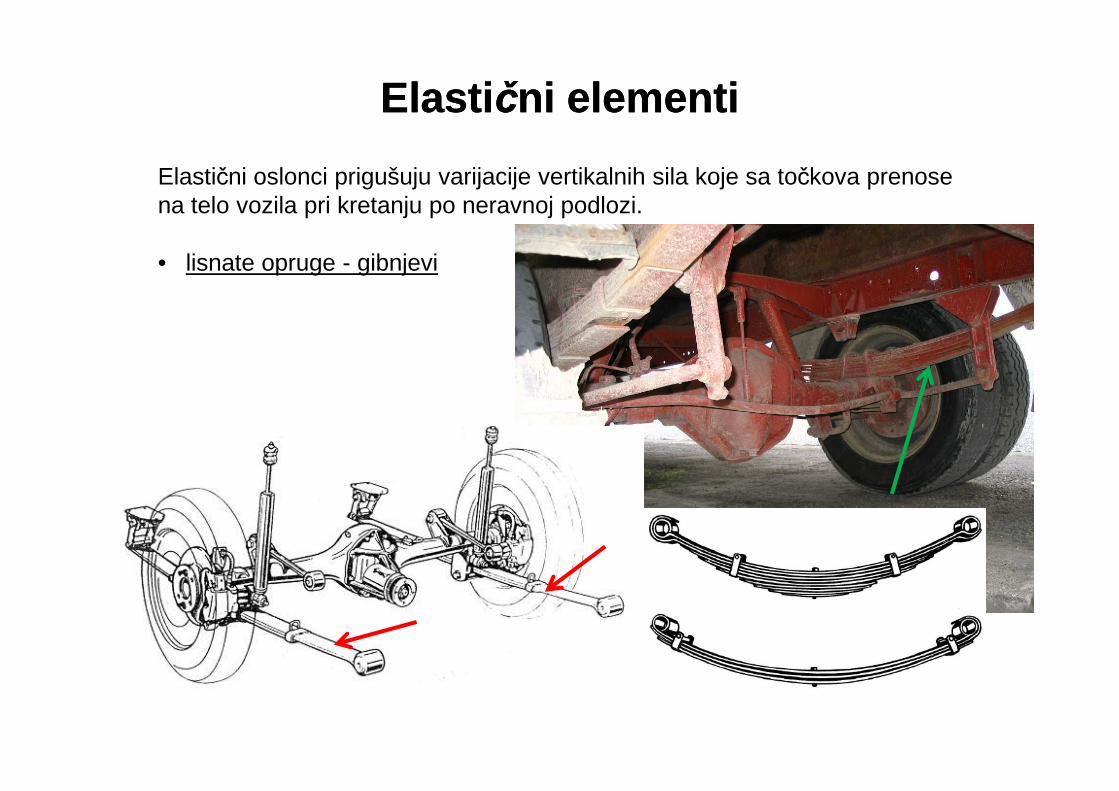
Elastični oslonci prigušuju varijacije vertikalnih sila koje sa točkova prenose na telo vozila pri kretanju po neravnoj podlozi.
• lisnate opruge - gibnjevi

Elasti čni elementiElasti čni elementi
Elastični oslonci prigušuju varijacije vertikalnih sila koje sa točkova prenose na telo vozila pri kretanju po neravnoj podlozi.
• torzione opruge

Elasti čni elementiElasti čni elementi
• torzione opruge

Elasti čni elementiElasti čni elementi
• torzione opruge

Elasti čni elementiElasti čni elementi
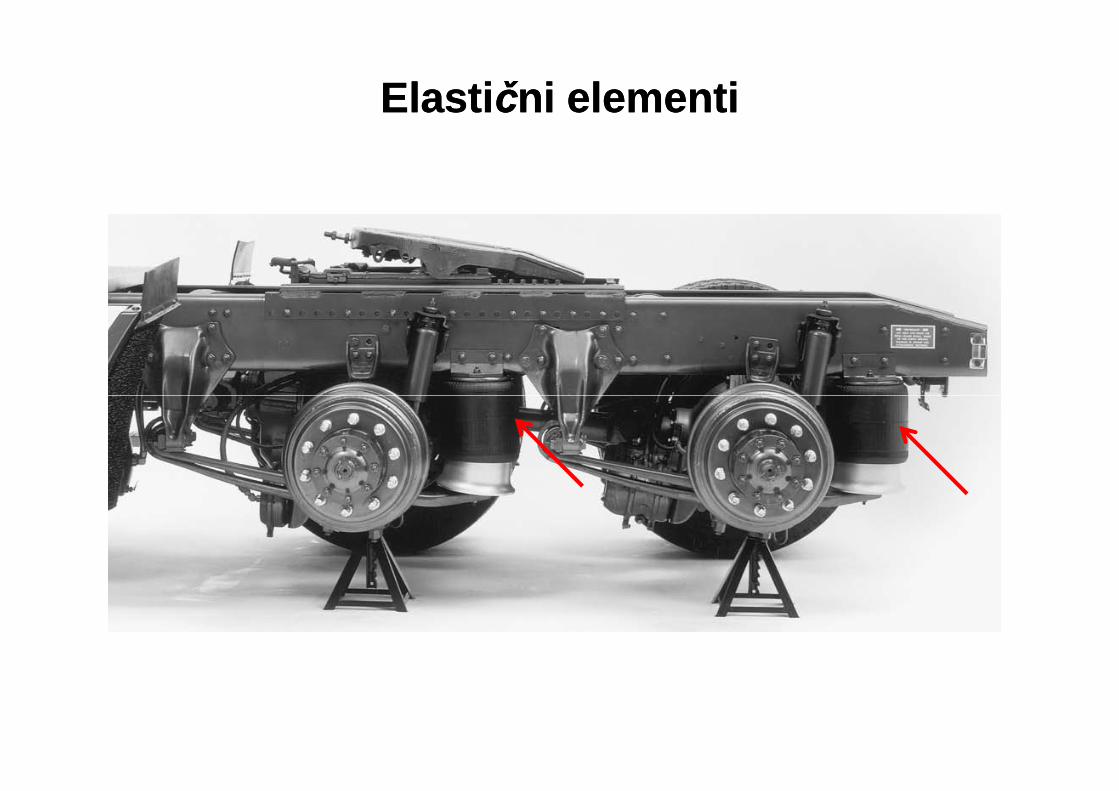
Elastični oslonci prigušuju varijacije vertikalnih sila koje sa točkova prenose na telo vozila pri kretanju po neravnoj podlozi.
• vazdušne opruge

Elasti čni elementiElasti čni elementi
Elastični oslonci prigušuju varijacije vertikalnih sila koje sa točkova prenose na telo vozila pri kretanju po neravnoj podlozi.
• spiralne opruge• lisnate opruge - gibnjevi• torzione opruge• vazdušne opruge – mehovi i jastuci
silapritisak gasa
radna površina
hod

Elasti čni elementiElasti čni elementi
navoj za vezu sa osloncem sa priključkom za vazduh
navoj za vezu sa osloncem
graničnik hoda
valjkasti jastuk
Elasti čni elementiElasti čni elementi

Elasti čni elementiElasti čni elementi
Elastični oslonci prigušuju varijacije vertikalnih sila koje sa točkova prenose na telo vozila pri kretanju po neravnoj podlozi.
• vazdušne opruge – hidropneumatsko oslanjanje

Elasti čni elementiElasti čni elementi

Elasti čni elementiElasti čni elementi
Opružna karakteristika: odnos sile i ugiba opruge (točka)
linearna karakteristika složena opruga sa 2 linearne progresivne karakteristike
progresivna

Geometrija sistema za oslanjanje i položaja to čkovaGeometrija sistema za oslanjanje i položaja to čkova
Točkovi menjaju svoj položaj u odnosu na vozilo radom sistema za oslanjanje (upravljački točkovi i radom sistema za upravljanje),
Tipične vrednosti (približno vertikalnog) pomeranja točkova na putničkim automobilima su 60..100 mm za sabijanje i 70 to 120 mm za podizanje (od srednjeg položaja).

Geometrija sistema za oslanjanje i položaja to čkovaGeometrija sistema za oslanjanje i položaja to čkova
Promena razmaka točkova i razmaka osovina i geometrije točkova u odnosu na vozilo i podlogu kao posledica pomeranja točkova zavisiće od konstrukcije sistema za oslanjanje i situacije (povećanje opterećenja vozila, kočenje, ubrzanje, skretanje).
Točkovi menjaju svoj položaj u odnosu na vozilo (u manjoj meri) i zbog elastokinematike, tj. deformacija elastičnih zglobova pri dejstvu uzdužnih i bočnih sila na točku.

Geometrija sistema za oslanjanje i položaja to čkovaGeometrija sistema za oslanjanje i položaja to čkova
Bočni nagib to čka: ugao odstupanja srednje ravni točka od vertikale.Ugao bočnog nagiba prednjih točkova putničkih automobila je po pravilu pozitivan i manji od 1°. Zbog nagiba točak ima nejednaku raspodelu pritiska na podlogu i teži da skrene na stranu na koju je nagnut.skrene na stranu na koju je nagnut.

Geometrija sistema za oslanjanje i položaja to čkovaGeometrija sistema za oslanjanje i položaja to čkova
Bočni nagib to čka: Bočni nagib će se menjati sa radom sistema za oslanjanje (pomeranje točka u odnosu na karoseriju) i usled naginjanja vozila u celini (npr. u krivini).

Geometrija sistema za oslanjanje i položaja to čkovaGeometrija sistema za oslanjanje i položaja to čkova
Bočni nagib osovinice rukavca (ose zakretanja): ugao između stvarne ili imaginarne obrtne ose rukavca i vertikalne linije u poprečnoj vertikalnoj ravni. Osa osovinice rukavca (postojala ona fizički ili ne) je osa oko koje se upravljački točak zakreće. upravljački točak zakreće. Teži se postavljanju ose zakretanja što bliže centru točka (presek središnje ravni točka i ose točka) na šta utiče i bočni nagib točka, a zajedno rezultiraju poluprečnikom zakretanja točka

Geometrija sistema za oslanjanje i položaja to čkovaGeometrija sistema za oslanjanje i položaja to čkova
Polupre čnik zakretanja to čka: rastojanje između tačaka prodora obrtne ose rukavca i srednje ravni točka kroz stajnu površinu.
Poluprečnik zakretanja točka je pozitivan ako je sredina pneumatika u kontaktu sa tlom dalje od sredine vozila kontaktu sa tlom dalje od sredine vozila nego što je tačka prodora ose zakretanja kroz stajnu površinu.

Geometrija sistema za oslanjanje i položaja to čkovaGeometrija sistema za oslanjanje i položaja to čkova
Kada je radijus pozitivan, točkovi pri kočenju teže da se rašire, što je dobro u slučaju kočenja u krivini. Kada je radijus negativan, točkovi će pri kočenju težiti da se skupe (konvergiraju), što je pogodno za stabilnost upravljanja na podlogama na kojim su različiti koeficijenti prijanjanja kojim su različiti koeficijenti prijanjanja za levi i desni točak (μ-split situacija).
Poluprečnik se izvodi da bude što manji (na slici je prikazan preuveličano). Tipične vrednosti su -20..80 mm.

Geometrija sistema za oslanjanje i položaja to čkovaGeometrija sistema za oslanjanje i položaja to čkova
Zatur : Rastojanje tačke prodora stvarne ili zamišljene obrtne ose rukavca kroz stajnu površinu od vertikalne poprečne ravni koja prolazi kroz centar točka. Tipična vrednost je -10..80 mm.
Ugao zatura τ je oštar ugao između te Ugao zatura τ je oštar ugao između te dve linije:motor napred - pogon nazad τ = 1..10°, motor i pogon napred τ = 1..5°. Osa zakretanja točka ne mora prolaziti kroz osu točka.

Geometrija sistema za oslanjanje i položaja to čkovaGeometrija sistema za oslanjanje i položaja to čkova
Usmerenost to čkova : Razlika rastojanja između zadnje i prednje unutrašnje ivice naplatka u horizontalnoj ravni koja prolazi kroz centar točkova: B - C > 0, pozitivna usmerenost (konvergencija) ili obrnuto negativna usmerenost (divergencija).Može biti izražena i preko ugla: oštar ugao između ose točka i poprečne vertikalne ravni. U pravolinijskoj vožnji dejstvo sila na točkove deluje da se oni zakrenu za oko 0,1 do 0,3° (elastokinematika) i usmerenost je podešena tako da u pravolinijskoj vožnji budu paralelni.pravolinijskoj vožnji budu paralelni.

Mehanizmi za vo đenje to čkovaMehanizmi za vo đenje to čkova
Mehanizam za vođenje točkova - povezuje točkove ili krutu osovinu (ako je takva konstrukcija) za noseću
konstrukciju vozila, - prenosi sile sa točkova na vozilo i - omogućava potreban stepen pokretljivosti točkova i osovina u odnosu
na telo vozila:- vertikalno pomeranje- zakretanje upravljačkih točkova- zakretanje upravljačkih točkova

Mehanizmi za vo đenje to čkovaMehanizmi za vo đenje to čkova
Prema tipu veze između točkova iste osovine, razlikuju se: • zavisno oslanjanje u kom između točkova postoji kruta kinematička
veza, tako da se kretanje jednog točka prenosi na drugi, • nezavisno oslanjanje u kome se oba točka kreću nezavisno jedan od
drugog i • poluzavisno oslanjanje u kom elastični vezni element delimično
prenosi kretanja jednog točka na drugi.

Mehanizmi za vo đenje to čkovaMehanizmi za vo đenje to čkova
Zavisno oslanjanje

Mehanizmi za vo đenje to čkovaMehanizmi za vo đenje to čkova
Zavisno oslanjanje

Mehanizmi za vo đenje to čkovaMehanizmi za vo đenje to čkova
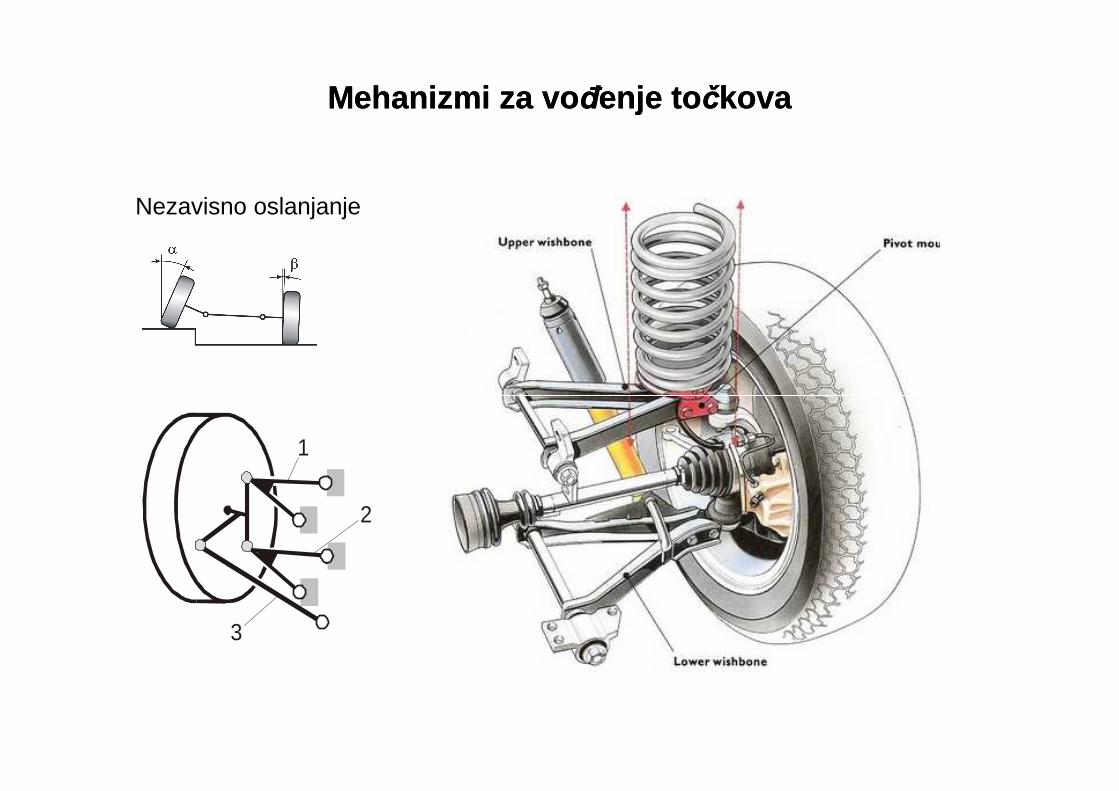
Nezavisno oslanjanje
4
3
2
Mehanizmi za vo đenje to čkovaMehanizmi za vo đenje to čkova
Nezavisno oslanjanje
1
2
3

Mehanizmi za vo đenje to čkovaMehanizmi za vo đenje to čkova
Nezavisno oslanjanje
1
2
3

Mehanizmi za vo đenje to čkovaMehanizmi za vo đenje to čkova
Nezavisno oslanjanje

Mehanizmi za vo đenje to čkovaMehanizmi za vo đenje to čkova
Nezavisno oslanjanje

Mehanizmi za vo đenje to čkovaMehanizmi za vo đenje to čkova
Poluzavisno oslanjanje
1
2
2

Prigušni elementi Prigušni elementi -- amortizeriamortizeri
Prigušivači ili amortizeri služe za - prigušivanje oscilacija tela (nadgradnje) vozila u odnosu na podlogu, i - prigušivanje oscilacija točkova u odnosu na telo vozila (umanjuju
fluktuacije sile prijanjanja točka)

Prigušni elementi Prigušni elementi -- amortizeriamortizeri
Princip rada: viskozno trenje pri kretanju elemenata amortizera kroz ulje (određene viskoznosti) generiše silu u funkciji brzine promene dužine amortizera (uvlačenje ili izvlačenje), suprotnog smera od smera kretanja klipa amortizera.
Amortizer prigušuje oscilacije disipacijom kinetičke energije kretanja u toplotu.
Konstrukcija: cevni teleskopski hidraulički amortizerKonstrukcija: cevni teleskopski hidraulički amortizer
Jedan kraj prigušivača (klipnjača ili cilindar) se vezuje za telo vozila, a drugi za pokretne elemente sistema oslanjanja, tj. poluge za vođenje točka, nosač točka ili krutu osovinu

Prigušni elementi Prigušni elementi -- amortizeriamortizeri
Dvocevni amortizer1 - unutrašnja cev, 2 - klip sa ventilima, 3 - klipnjača, 4 - dno sa ventilima,5 - spoljašnja cev
41
Prigušni elementi Prigušni elementi -- amortizeriamortizeri
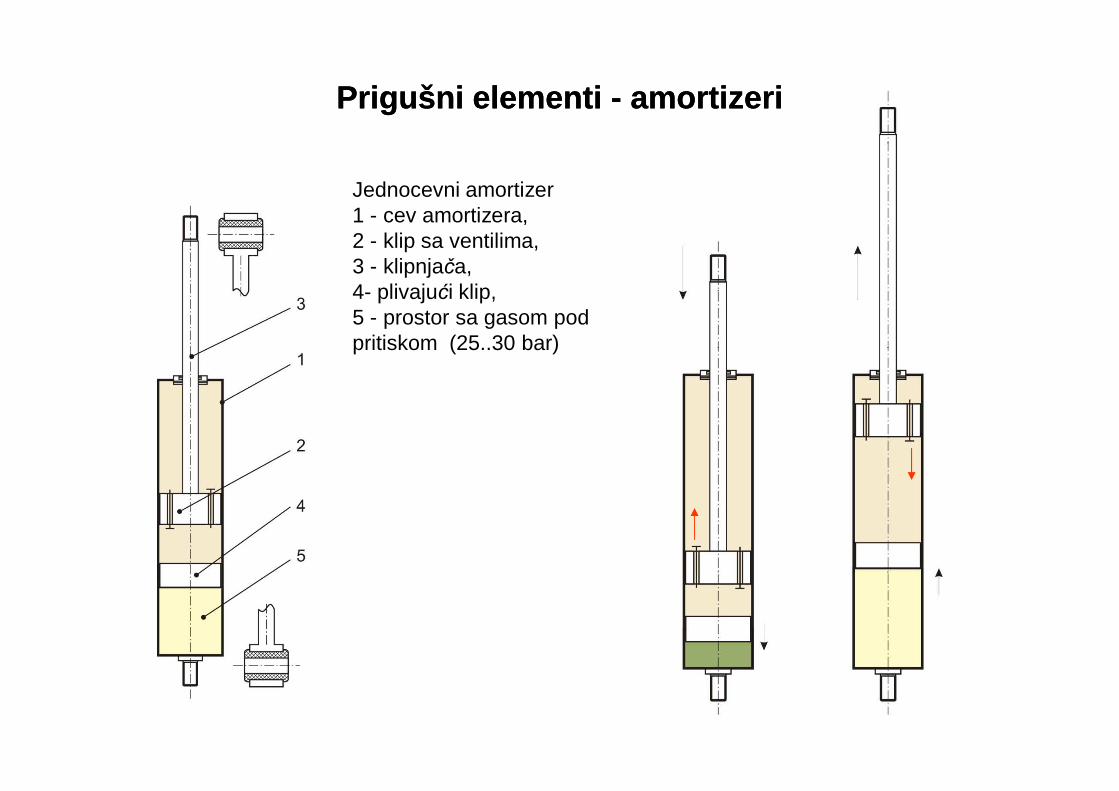
Jednocevni amortizer1 - cev amortizera, 2 - klip sa ventilima, 3 - klipnjača, 4- plivajući klip, 5 - prostor sa gasom pod pritiskom (25..30 bar)

Prigušni elementi Prigušni elementi -- amortizeriamortizeri

Prigušni elementi Prigušni elementi -- amortizeriamortizeri
Karakteristike prigušenja
Ventili u prigušivačima: dvostruki jednosmerni, Degresivna asimetrična karakteristika: veće prigušenje u hodu širenja nego pri hodu sabijanja
Sprečavanje kavitacije u dvocevnim amortizerima:amortizerima:U hodu širenja podni ventili samo propuštaju radnu tečnost ne pružajući otpor njenom proticanju, dok ventili u klipu ostvaruju praktično svo prigušenje. U hodu sabijanja podni ventili su ti koji ostvaruju veliko, a ventili u klipu manje prigušenje (veće nego prigušenje podnih ventila u hodu širenja

Prigušni elementi Prigušni elementi -- amortizeriamortizeri
Sila koja nastaje u amortizeru
Degresivna asimetrična karakteristika: veće prigušenje u hodu širenja nego pri hodu sabijanja
Radna karakteristika (sila-hod) i prigušna karakteristika (sila-brzina)
nD zkzsignF && ⋅⋅−= )(
Radna karakteristika (sila-hod) i prigušna karakteristika (sila-brzina)

Donji (vozni) postrojDonji (vozni) postroj
Sistem za oslanjanje, točkovi, sistem za upravljanje , sistem za kočenje, noseća konstrukcija.
Osnovni zadaci:•kretanje vozila,•bezbednost (aktivna): prenos sila između točkova i podloge - prijanjanje•bezbednost (aktivna): održavanje i promena pravca kre tanja ,•kočenje,•ubrzanje,•ubrzanje,•udobnost: ublažavanje udara, vibracija i prigušenje oscilacija, sprečavanje prevremenih oštećenja i skraćenja veka trajanja usled dinamičkih opterećenja.
Dodatni zahtevi:•vek trajanja,•pogodnost za održavanje,•što niža cena,•posebne funkcije: podešavanje visine tela vozila od tla (ručno ili automatski), podizanje neopterećenih osovina, automatska korekcija pravca kretanja i sl.

Sistem za Sistem za upravljanjeupravljanje
Zadatak : održavanje i promena pravca kretanja
Zahtevi : • laka i precizna promena pravca kretanja vozila• pouzdanost i izdržljivost - mehanička veza između upravljača i
točkova• stabilnost pri pravolinijskom kretanju velikim brzinama• težnja da se vozilo vrati u pravolinijsku vožnju• pravilno vođenje točkova pri skretanju• male sile upravljanja• pružanje osećaja kontakta točkova sa podlogom• mala osetljivost na dejstvo spoljašnjih sila na točkovima
• zadovoljenje regulative ECE R79

Sistem za Sistem za upravljanjeupravljanjeStruktura sistema :• komandni mehanizam• upravljački prenosnik• servo uređaj (opciono)• polužni mehanizam• upravljački točkovi
(uvek prednji*)

Kinematika kretanja vozila u kriviniKinematika kretanja vozila u krivini
SA BOČNO KRUTIM TOČKOVIMA
(bez povođenja) Odgovara kretanju veoma malim brzinama na horizontalnoj podlozi sa dobrim prijanjanjem.
Dejstvo bočne sile na točak čini da se ne kreće u pravcu svoje srednje ravni: povođenje.
O1
srednje ravni: povođenje.
Intenzitet povođenja zavisi i od brzine kretanja, prijanjanja, karakteristika pneumatika...
Posledica: točkovi se (nikad) ne kotrljaju kao “po šinama”

Kinematika kretanja vozila u kriviniKinematika kretanja vozila u krivini
SA BOČNO KRUTIM TOČKOVIMA
(bez povođenja)
SA BOČNO ELASTIČNIM TOČKOVIMA
(uticaj povođenja)δPL δPDPOVOĐENJE ⇒
PROMENA POLOŽAJATRENUTNOG CENTRA ZA ISTO ZAKRETANJE
UPRAVLJAČKIH TOČKOVA
δZDδZL
TOČKOVA
O1
O2
PROMENA POLOŽAJA TRENUTNOG CENTRA⇒ PROMENA POLUPREČNIKA KRIVINE
FC

Kinematika kretanja vozila u kriviniKinematika kretanja vozila u krivini

Kinematika kretanja vozila u kriviniKinematika kretanja vozila u krivini
Minimalni prečnik kruga okretanja vozila (bez zanošenja vozila) postiže se pri maksimalnoj zakrenutosti upravljačkih točkova i može biti naveden kao:• prečnik kruga okretanja tragova točkova, ili• prečnik kruga okretanja između zidova.

Kinematika kretanja vozila u kriviniKinematika kretanja vozila u krivini
Minimalni prečnik kruga okretanja vozila (bez zanošenja vozila) postiže se pri maksimalnoj zakrenutosti upravljačkih točkova i može biti naveden kao:• prečnik kruga okretanja tragova točkova, ili• prečnik kruga okretanja između zidova.

Kinematika kretanja vozila u kriviniKinematika kretanja vozila u krivini
U statičkim uslovima, za isti ugao zakretanja upravljačkih točkova, od dva vozila istog razmaka točkova a različitih razmaka osovina, manji radijus okretanja moći će da ostvari vozilo sa manjim razmakom osovina.

Kinematika kretanja vozila u kriviniKinematika kretanja vozila u krivini
U statičkim uslovima, za isti ugao zakretanja upravljačkih točkova, od dva vozila istog razmaka točkova a različitih razmaka osovina, manji radijus okretanja moći će da ostvari vozilo sa manjim razmakom osovina.

Kinematika kretanja vozila u kriviniKinematika kretanja vozila u krivini
U pogledu manevarskih sposobnosti, zakonom je određeno da najisturenija tačka svakog vozila prilikom vožnje u krugu od 360°, mora biti vođena po krugu prečnika od najviše 25 m, gde su zbog velikih gabarita najzahtevnija teretna motorna vozila, autobusi i skupovi vozila (kamion sa prikolicom, tegljači sa poluprikolicom).
7,2 m25 m

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeStruktura sistema :• komandni mehanizam• upravljački prenosnik• servo uređaj (opciono)• polužni mehanizam• upravljački točkovi
(uvek prednji*)

Sistem za Sistem za upravljanjeupravljanjeStruktura sistema :• komandni mehanizam• upravljački prenosnik• servo uređaj (opciono)• polužni mehanizam• upravljački točkovi
(uvek prednji*)

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeStruktura sistema :• komandni mehanizam• upravljački prenosnik• servo uređaj (opciono)• polužni mehanizam• upravljački točkovi
(uvek prednji*)

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeStruktura sistema :• komandni mehanizam• upravljački prenosnik• servo uređaj (opciono)• polužni mehanizam• upravljački točkovi
(uvek prednji*)

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeStruktura sistema :• komandni mehanizam• upravljački prenosnik• servo uređaj (opciono)• polužni mehanizam• upravljački točkovi
(uvek prednji*)

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeStruktura sistema :• komandni mehanizam• upravljački prenosnik• servo uređaj (opciono)• polužni mehanizam• upravljački točkovi
(uvek prednji, mogu i zadnji )

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeStruktura sistema :• komandni mehanizam• upravljački prenosnik• servo uređaj (opciono)• polužni mehanizam• upravljački točkovi
(uvek prednji*)

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeStruktura sistema :• komandni mehanizam• upravljački prenosnik• servo uređaj (opciono)• polužni mehanizam• upravljački točkovi
(uvek prednji*)

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeStruktura sistema :• komandni mehanizam• upravljački prenosnik• servo uređaj (opciono)• polužni mehanizam• upravljački točkovi
(uvek prednji*)

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanje
Upravlja čki prenosnik:• prenosi kretanje - signal za upravljanje sa upravljača na
upravljačke točkove• povećava silu na upravljaču kojom se deluje na upravljačke
točkove (prenosni odnos i dejstvo servo-uređaja ako postoji)
Konstrukcija upravljačkog prenosnika• sa zupčastom letvom• sa navojnim vretenom• Gemmer

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeUpravlja čki prenosnik sa zup častom letvom

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeUpravlja čki prenosnik sa zup častom letvom

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeUpravlja čki prenosnik sa zup častom letvom

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeUpravlja čki prenosnik: sa navojnim vretenom i navrtkom sa recirkulirajućim kuglicama

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeUpravlja čki prenosnik: Gemmer

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeKinematika upravlja čkih to čkova: polužni mehanizam (trapez upravljanja)prenosi kretanje sa upravljačkog prenosnika na točkove iobezbeđuje odgovarajuću kinematiku zakretanja točkova

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeKinematika upravlja čkih to čkova: polužni mehanizam (trapez upravljanja) - zavisno oslanja nje

Konstrukcija sistema za Konstrukcija sistema za upravljanjeupravljanjeKinematika upravlja čkih to čkova: polužni mehanizam (trapez upravljanja)

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjePojačanje sile zakretanja na upravlja čkim to čkovima:- zakonski zahtev zbog maksimalnih sila na upravljaču (Regulativa ECE R79)- komfor- bezbednost- zadržavanje osećaja kontakta sa putem- potrošnja energije (gorivo)- pouzdanost sistema: mora ostati mehanička veza upravljača i točkova- zaštita od preopterećenja (krajnji položaj i sl.)- najveća pomoć potrebna kada vozilo stoji, mnogo manje kada se vozilo kreće
velikim brzinamavelikim brzinama
Servo-uređaji u sistemu za upravljanje:- hidraulički sistem sa pogonom pumpe od motora SUS,- hidraulički sistem sa električnom pumpom (putnički automobili),- elektro-mehanički sistem (putnički automobili).

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeHidrauli čki servo-ure đaj- pumpa je pogonjena
motorom SUS- upravljanje je u funkciji
otpora obrtanju točka upravljača: obrtni moment na vratilu upravljača
- radni fluid: ATF ili hidrauličko ulje
hidrocilindarprigušnica
- potreban protok je u zavisnosti od brzine obrtanja upravljača,
- potreban pritisak je u zavisnosti od obrtnog momenta na upravljaču
upravljački prenosnik
razvodnik

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeHidrauli čki servo-ure đaj- pumpa je pogonjena motorom SUS
- pumpa je dimenzionisana za najveći pritisak i protok kada je motor na praznom hodu (okretanje upravljača na mestu)
- višak se prigušuje i vraća u rezervoar- 80-100 bar putnički automobili- oko 150 bar teretna vozila i autobusi- oko 150 bar teretna vozila i autobusi
U pumpi se nalaze- prelivni ventil kojim se smanjuje protok
na višim obrtajima motora- rasteretni ventil, koji ograničava
maksimalni pritisak u sistemu (npr. kada su točkovi zakrenuti u krajnji položaj)

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeHidrauli čki servo-ure đaj- pumpa je pogonjena motorom SUS
- pumpa je dimenzionisana za najveći pritisak i protok kada je motor na praznom hodu (okretanje upravljača na mestu)
- višak se prigušuje i vraća u rezervoar- 80-100 bar putnički automobili- oko 150 bar teretna vozila i autobusi- oko 150 bar teretna vozila i autobusi
U pumpi se nalaze- prelivni ventil kojim se smanjuje protok
na višim obrtajima motora- rasteretni ventil, koji ograničava
maksimalni pritisak u sistemu (npr. kada su točkovi zakrenuti u krajnji položaj)

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeHidrauli čki servo-ure đaj- ventilima za doziranje ulja u komoru hidro-cilindra upravlja ventil na
osnovu uvijanja dela vratila upravljača (uvijanje je malo)
vratilo upravljača
povratni vod
napojni vod
nepovratni ventil
klip hidrocilindar
spoljašnja čaura razvodnikaunutrašnji deo
razvodnika

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeHidrauli čki servo-ure đaj
vratilo upravljača
ka komorama
povratni vod
napojni vod
nepovratni ventil
komorama klipa

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeHidrauli čki servo-ure đaj: pravolinijska vožnjaulje iz pumpe prolazi kroz ventil i vraća se u rezervoar

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeHidrauli čki servo-ure đaj: skretanje u levo• dovod ulja se preusmerava u komoru hidrocilindra koja treba da ima
veći pritisak• iz druge komore se ulje vraća u rezervoar (zbog smanjenja zapremine)

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeRegulacija hidrauličkog servo-uređaja:• najveća pomoć kada vozilo stoji - parkiranje, ili u gradskoj vožnji• “teži” upravljač kada se vozilo kreće velikim brzinama
• u hidrauličkim i elektro-hidrauličkim sistemima primenjuje se regulacija u funkciji brzine vozila i brzine obrtanja vratila
moment aktiviranja moment aktiviranja

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeHidrauli čki servo-ure đaj: prenosnik sa navojnim vretenom

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeHidrauli čki servo-ure đaj: prenosnik sa navojnim vretenom

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeElektro-hidrauli čki sistem :• Hidraulička pumpa je pogonjena elektromotorom, nezavisno od motora
SUS• Upravljački i radni (hidraulički) deo je isti kao na hidrauličkom servo-uređaju

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeElektro-hidrauli čki sistem :• Elektronska kontrola servo-pojačanja je u funkciji režima kretanja vozila i
upravljanja
prot
ok
brzina vozila

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeElektro-mehani čki sistem : sa paralelnim pogonom
stub upravljača
upravljač
davač momenta
vratilo upravljača
EUJ
elektromotor
prenosnik

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeElektro-mehani čki sistem : sa paralelnim pogonom
davač momentaEUJ elektromotor
davač ugla
vratilo
pog. zupčanik pog. zupčanik
zup. letva

ServoServo--ure đaj sistema za upravljanjeuređaj sistema za upravljanjeElektro-mehani čki sistem - regulacija
moment na upravljaču, Nm
doda
tni m
omen
t, N
m