documento proyecto de grado
TRANSCRIPT

1
ANÁLISIS DE UN SISTEMA DE CONTROL DE PRESION A LA DESCARGA Y FLUJO MÍNIMO PARA UNA BOMBA CENTRIFUGA DE INYECCIÓN DE AGUA.
DANIEL FERNANDO MAYA CERÓN ÁLVARO ERNESTO SANTACRUZ PÉREZ
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
BOGOTA 2010

2
ANÁLISIS DE UN SISTEMA DE CONTROL DE PRESION A LA DESCARGA Y FLUJO MÍNIMO PARA UNA BOMBA CENTRIFUGA DE INYECCIÓN DE AGUA.
DANIEL FERNANDO MAYA CERÓN ÁLVARO ERNESTO SANTACRUZ PÉREZ
Proyecto de grado para optar al título de: Especialista en Automatización de Procesos Industriales
Asesor: Ing. Mauricio Duque PhD.
UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA BOGOTA
2010

3
GLOSARIO
BOMBA CENTRIFUGA: es un tipo de bomba hidráulica que transforma la energía mecánica de un impulsor rotatorio llamado rodete en energía cinética y potencial requeridas
DIAGRAMA DE BLOQUES: Representación grafica de las funciones desempeñadas por cada componente y del flujo de señales, a diferencia de una representación matemática, el diagrama de bloques tiene la ventaja de indicar de forma más real el flujo de señales del sistema
DIAGRAMA DE FLUJO: es una forma de representar gráficamente los detalles algorítmicos de un proceso multifactorial es decir dar soluciones a problemas que se pueden resolver en una manera que a veces no es sencilla o simplemente si no hay solución con problema se debe usar una sencilla y sin problemas
ESTABILIDAD: En un sistema de control existe estabilidad cuando las características del mismo no varian en el tiempo.
FUNCIÓN DE TRANSFERENCIA: Modelo matemático para caracterizar la relación entrada –salida de componentes o sistemas.
GRAFCET: Es un grafo o diagrama funcional normalizado, que permite hacer un modelo del proceso a automatizar, contemplando entradas, acciones a realizar, y los procesos intermedios que provocan estas acciones
MATLAB: Software matemático que ofrece un entorno de desarrollo integrado.
PIA: Planta de Inyección de Agua
PERTURBACIÓN: Es una señal que tiene a afectar negativamente el valor de salida de un sistema.
PID: Es un mecanismo de control por realimentación proporcional, integral y derivativa que se utiliza en sistemas de control, principalmente en las industrias
PLANO COMPLEJO: Es una forma de visualizar el espacio de los números complejos. Puede entenderse como un plano cartesiano modificado, en el que la parte real está representada en el eje x y la parte imaginaria en el eje y.
PLC: Programador Lógico Controlable. Equipo encargado de procesar y evaluar condiciones de proceso para ejecutar acciones secuenciales o continuas sobre las variables de control .
POTENCIA: cantidad de energía eléctrica o trabajo, que se transporta o que se consume en una determinada unidad de tiempo.
P&ID: Diagrama de Tuberías e Instrumentación de un proceso industrial.

4
SIMULINK: Herramienta de Matlab, que permite el modelado, simulación y análisis de sistemas dinámicos..
SIMULACIÓN: Proceso de diseñar un modelo de un sistema real y llevar a término experiencias con él, con la finalidad de comprender el comportamiento del sistema o evaluar nuevas estrategias -dentro de los limites impuestos por un cierto criterio o un conjunto de ellos - para el funcionamiento del sistema.
SISOTOOL: Herramienta gráfica de Matlab, que permite el diseño interactivo de un controlador para un sistema SISO (single input single output).
VALVULA DE CONTROL: Aparato mecánico con el cual se puede iniciar, detener o regular la circulación (paso) de líquidos o gases mediante una pieza movible que abre, cierra u obstruye en forma parcial uno o más orificios o conductos.

5
RESUMEN
Este artículo presenta un ejemplo de una estrategia de control utilizada en la planta PI6 (Planta Inyección de Agua) del campo petrolero La Cira – Infantas (Colombia), cuyos controladores fueron establecidos de forma empírica en campo, para finalmente proponer desde la academia, una estrategia alternativa de control clásico para este sistema en particular, a través del diseño de controladores, y utilizando los lazos de control instalados en el sistema, permitiendo mantener los variables de presión y flujo de descarga en valores de operación eficientes en estado estable y en condiciones de arranque.
Palabras clave: Control de Presión, PID, Arranque, Controladores, Válvulas de Control, Bombas.

6
AGRADECIMIENTOS
Expresamos nuestro profundo sentimiento de admiración y gratitud al Dr. Mauricio Duque, por la inmensa colaboración para el desarrollo del proyecto, y la elaboración del presente documento.
De igual forma agradecemos los ingenieros Andrés Pantoja y Michel Aljure, por la colaboración prestada en el desarrollo de las simulaciones contenidas en el desarrollo de los objetivos del proyecto.

7
TABLA DE CONTENIDO INTRODUCCIÓN ........................................................................................................................... 12
1. DEFINICIÓN DEL PROBLEMA ........................................................................................... 13
1.1. PLANTA DE INYECCIÓN - PIA6 – CAMPO LA CIRA INFANTAS ....................... 13
1.2. SISTEMA DE BOMBEO ................................................................................................ 15
1.2.1. Bombas y Motores ................................................................................................. 15
1.2.2. Instrumentación del sistema de bombeo ............................................................ 17
1.3. CONTROL DEL SISTEMA DE BOMBEO .................................................................. 20
1.3.1. Lazo de control de presión de descarga ............................................................ 20
1.3.2. Lazo de control de flujo mínimo / alta presión ................................................... 20
2. OBJETIVOS ............................................................................................................................ 23
3. CARACTERIZACIÓN E IDENTIFICACIÓN DEL SISTEMA ............................................ 24
3.1. LEVANTAMIENTO DE DATOS EN CAMPO ............................................................. 24
3.1.1. Tendencias – Lazo de control de presión........................................................... 24
3.1.2. Tendencias – Escalón Válvula de Recirculación ............................................... 26
3.2. FUNCIÓN DE TRASNFERENCIA P1(s)/C(s) ........................................................... 28
3.3. FUNCIÓN DE TRANSFERENCIA F1(s)/C(s) ............................................................ 30
3.4. FUNCIÓN DE TRANSFERENCIA P2(s)/C(s) ............................................................ 33
3.5. FUNCIÓN DE TRANSFERENCIA F2(s)/C(s) ............................................................ 35
4. ANALISIS Y DISEÑO DE LOS CONTROLADORES ....................................................... 39
4.1. DEFINICIÓN DE LOS CONTROLADORES A UTILIZAR ........................................ 39
4.2. CONTROLADOR PARA P1(s) ...................................................................................... 41
4.3. CONTROLADOR PARA P2(s) ...................................................................................... 45
5. ESTRATEGIAS DE CONTROL ........................................................................................... 50
5.1. ESTRATEGIAS DE CONTROL EN REGIMEN ESTABLE ...................................... 50
5.1.1. Estrategia 1: Ejecución simultanea de dos controladores para dos válvulas de control ................................................................................................................................. 51
5.1.2. Estrategia 2: Ejecución escalonada de controladores ..................................... 55
5.1.3. Estrategia 3: Un solo controlador con esfuerzo extendido .............................. 58
5.1.4. Análisis de las estrategias .................................................................................... 61
5.2. ESTRATEGIAS DE CONTROL EN REGIMEN DE ARRANQUE ........................... 62

8
5.2.1. Etapas propuestas para el arranque del sistema .............................................. 62
5.2.2. Heurístico de arranque propuesto ....................................................................... 63
4.1.1. Simulación de arranque propuesto ...................................................................... 65
6. CONTROL ACTUAL VS CONTROL PROPUESTO ......................................................... 68
6.1. CONTROL ACTUAL VS CONTROL PROPUESTO ANTE PERTURBACIONES NO CONTINUAS ........................................................................................................................ 68
6.2. CONTROL ACTUAL VS CONTROL PROPUESTO ANTE PERTURBACIONES CONTINUAS ............................................................................................................................... 70
6.3. CONTROL ACTUAL VS CONTROL PROPUESTO – ARRANQUE DEL SISTEMA 72
7. COSTOS DE IMPLEMENTACIÓN Y EVALUCIÓN ECONÓMICA ................................ 78
7.1. CUANTIFICACIÓN DE BENEFICIONES ECONÓMICOS ...................................... 78
7.2. COSTOS EN IMPLEMENTACIÓN DE ESTRATEGIA ............................................. 81
8. CONCLUSIONES ................................................................................................................... 83
BIBLIOGRAFÍA
ANEXOS

9
LISTA DE FIGURAS Figura 1.1 Distribución General – Planta PIA6 – Campo La Cira – Infantas Figura 1.2: Sistema Principal de Inyección – Planta PIA6 – Campo La Cira – Infantas Figura 1.3: a) Fotografía bomba de inyección, b) Fotografía motor, c) Dibujo esquemático de la bomba y el motor. Figura 1.4: Curva de las bombas de inyección H vs. Q a 3600 rpm Figura 1.5: Diagrama P&ID – Línea de bombeo – Planta PIA6 Figura 1.6 Fotografía lateral válvulas PCV y FCV – Línea de bombeo – Planta PI6 Figura 1.7 Fotografía frontal - Línea de descarga – Planta PI6A Figura 2.1: Funciones de transferencia Figura 2.2 Escalón – Válvula de control de presión Figura 2.3 Presión y flujo de descarga – Escalón válvula de control de presión Figura 2.4 Escalón – Válvula de recirculación Figura 2.5 Presión y flujo de descarga – Escalón válvula de recirculación Figura 2.5: Presión descarga – Escalón válvula de control de presión Figura 2.6: Presión descarga – Escalón válvula de control de presión – Respuesta Real Vs Simulada y Diagrama Simulink Figura 2.7: Flujo de descarga – Escalón válvula de control de presión Figura 2.8: Flujo de descarga – Escalón válvula de control de presión – Respuesta Real Vs Simulada y Diagrama Simulink Figura 2.9: Presión de descarga – Escalón válvula de control de recirculación Figura 2.10: Presión de descarga – Escalón válvula de recirculación – Respuesta Real Vs Simulada y Diagrama Simulink Figura 2.11: Flujo de descarga – Escalón válvula de control de recirculación Figura 2.12: Flujo de descarga – Escalón válvula de control de recirculación Figura 3.1: Diagrama – Estrategia básica Figura 3.2: Diagrama - lazo de control para presión de descarga con función de transferencia P1(s) Figura 3.3: Diagrama - lazo de control para presion de descarga con función de transferencia P2(s) Figura 3.4: Ubicación de polos en lazo cerrado de la función de transferencia P1(s) Figura 3.5: Comportamiento de P1(s) ante entrada escalón unitario Figura 3.6: Ecuación PID resultante calculada en SISOTOOL para P1(s) Figura 3.7: Ubicación de polos en lazo cerrado de la función de transferencia P1(s) con el controlador PID optimizado Figura 3.8: Comportamiento de P1(s) ante entrada escalón unitario con el controlador PID Figura 3.9: Ubicación de polos en lazo cerrado de la función de transferencia P2(s) con el controlador PID Figura 3.10: Comportamiento de P2(s) ante entrada escalón unitario Figura 3.11: Ecuación PID calculada en SISOTOOL para P2(s)

10
Figura 3.12: Ubicación de polos en lazo cerrado de la función de transferencia P2(s) con el controlador PID Figura 3.13: Comportamiento de P1(s) ante entrada escalón unitario con el controlador PID Figura 4.1: Función de transferencia P1(s) encapsulada - Simulink Figura 4.2: Función de transferencia P2(s) encapsulada - Simulink Figura 4.3: Simulación de Perturbaciones del Sistema Figura 4.4: Diagrama de bloques representativo de los dos controladores en marcha simultanea Figura 4.5: Diagrama de bloques representado en Simulink Figura 4.6: Comportamiento Presión de descarga con Perturbación no continua Figura 4.7: Comportamiento de las Válvula de control con Perturbación no continua. Figura 4.8: Comportamiento Presión de descarga con perturbaciones continuas Figura 4.9: Comportamiento de las Válvula de control con Perturbaciones continuas. Figura 4.10: Diagrama de bloques representativo de segunda estrategia de control Figura 4.11: Comportamiento Presión de descarga con perturbación no continua – Segunda estrategia Figura 4.12: Comportamiento de las válvulas de control con Perturbaciones no continuas. Figura 4.13: Comportamiento Presión de descarga con perturbación continua – Segunda estrategia Figura 4.14: Comportamiento de las Válvula de control con Perturbaciones continuas. Figura 4.15: Diagrama de bloques representativo de la tercera estrategia de control. Figura 4.16: Comportamiento Presión de descarga con perturbación no continua Figura 4.17: Comportamiento Presión de descarga con perturbación no continua – Tercera estrategia Figura 4.18 Comportamiento de las Válvula de control con Perturbación no continua Figura 4.19: Comportamiento Presión de descarga con perturbaciones continuas– Tercera estrategia Figura 4.20: Comportamiento de las Válvula de control con Perturbaciones continuas Figura 4.21 Grafcet de operación para el arranque de las bombas de inyección Figura 4.22: Diagrama de bloques para la simulación del arranque Figura 4.23: Comportamiento de la presión por la rampa de aceleración del Arrancador Suave Figura 4.24: Comportamientos de la presión por la rampa durante el arranque Figura 4.25: Comportamientos de las válvulas de presión y recirculación Figura 5.1: Pantalla PIDSetup RSLogix – Parámetros Control PI Actual Figura 5.2: Simulación – Presión de descarga control PI actual – Perturbación No Continua

11
Figura 5.3: Simulación – Presión de descarga control PID – Perturbación No Continua Figura 5.4: Simulación – Presión de descarga control PI actual – Perturbación continua Figura 5.6: Arranque existo – Comportamiento de la presión – Control PI y heurístico actual Figura 5.7: Arranque existo – Comportamiento de válvulas – Control PI y heurístico actual Figura 5.8: Arranque existo – Disputa de controles – Control PI y heurístico actual Figura 5.9: Arranque exitoso – Disputa de controles – Comportamiento de válvulas Figura 5.10: Arranque existo – Estabilización de presión – Control PI y heurístico actual Figura 5.11: Comportamiento de válvulas – Estabilización de presión – Control PI y heurístico actual Figura 5.12: Comportamiento de válvulas – Estabilización de presión – Control PI y heurístico actual Figura 6.1: Comportamiento Válvula PCV – 12 horas de operación

12
INTRODUCCIÓN Una de las tecnologías de optimización de pozos de bajo recobro en la producción de crudo, es la inyección controlada de agua a alta presión. Teniendo en cuenta la magnitud de las variables manejadas en estos procesos, y las características propias de los sistemas de bombeo utilizados, el control de variables como presión y flujo, es crítico para el proceso de producción de un pozo con dichas condiciones, y es fundamental para el correcto funcionamiento de las plantas de inyección y de los sistemas de las componen.
La Cira – Infantas es uno de los campos petroleros en Colombia con mayor antigüedad en su explotación. El campo opera desde principios del siglo pasado, y ha sido presenta condiciones de recobro bajas debido al tiempo prolongado de producción, por lo que cuenta con dos nuevas plantas de inyección de agua: PIA5 y PIA6 (Planta de Inyección de Agua). El sistema principal de inyección de agua es el corazón de planta PIA6, ya que se encarga del cambio de las condiciones del flujo para introducirlo a la línea de inyección del campo. El estudio contempla el análisis del sistema de control actual implementado en sistema principal de inyección de la planta PIA6, la cual fue puesta en operación en Junio de 2009.

13
1. DEFINICIÓN DEL PROBLEMA 1.1. PLANTA DE INYECCIÓN - PIA6 – CAMPO LA CIRA INFANTAS
La planta PIA6 atiende las necesidades inyección de agua a presión de los pozos que hacen parte del campo La Cira - Infantas, el cual es operado mediante un acuerdo entre Ecopetrol y Oxy. En la siguiente gráfica es posible observar la distribución general de la planta PIA6: Figura 1.1 Distribución General – Planta PIA6 – Campo La Cira – Infantas
Fuente: Oxy Andina La planta PIA6 tiene una capacidad instalada de tratamiento/inyección de 240.000 BPD aproximadamente, y recibe agua de dos fuentes principales:
• Agua de Producción: Obtenida del proceso de separación crudo/agua en las estaciones existentes en el campo. (120.000 BPD)
• Agua Fresca: Obtenida de la planta de tratamiento de Campo – 23, la cual se alimenta de las fluentes del Río La Colorada y la bocatoma La Llana. (120.000 BPD)

14
El agua de producción entra a la planta PIA6 directamente a una línea de tratamiento llamada “Tren de agua de producción” el cual se compone de los siguientes elementos:
• Tanque de almacenamiento de agua de producción • Sistema de bombeo “Booster” • Sistema de filtración • decantadores
El agua fresca proveniente de la planta de tratamiento tiene niveles altos de oxigeno (9 ppm O2 aprox.), los que se consideran suficientemente altos para generar corrosión en los equipos de proceso, y precipitación de óxidos de hierro que resultan de la mezcla con agua de producción (rica en hierro), lo que puede causar taponamientos de los filtros en los pozos y en disminución de la capacidad de inyección. Por lo tanto el agua fresca entra a la planta PIA6 directamente al llamado “Tren de agua fresca”, el cual cuenta un proceso de tratamiento a través de torres de desoxigenación, que remueven el oxigeno disuelto en el agua hasta un máximo de 0.5 ppm. Los elementos que componen el tren de agua fresca son:
• Tanque de almacenamiento de agua fresca • Torres desoxigenadoras • Bombas de transferencia de agua desoxigenada
Después de los procesos realizados tanto en el tren de agua de producción, como el tren de agua fresca, el caudal resultante se envía al sistema de inyección, el cual está compuesto por:
• Tanques de Cabeza (tanque de agua fresca, tanque de agua producida y facilidad para mezclar ambas)
• Bombas booster • Sistema de bombeo principal conformado por ocho bombas centrifugas.
En la siguiente gráfica se pueden observar los elementos mencionados:

15
Figura 1.2: Sistema Principal de Inyección – Planta PIA6 – Campo La Cira – Infantas
Fuente: Proctek Ltda. Los tanques de cabeza permiten acumular el agua y permiten manejar las variaciones de caudal proveniente de los trenes de agua fresca y de producción, así mismo, proveen la cabeza necesaria para las bombas Booster que a su vez alimentan al sistema principal de inyección.
1.2. SISTEMA DE BOMBEO
1.2.1. Bombas y Motores
El sistema principal de bombeo está compuesto por ocho bombas centrifugas multietapa marca Centrilift modelo C307017 fabricada conforme al estándar API RP11S2. Cada bomba cuenta con 25 etapas (14+11), una cámara de empuje horizontal que conecta la bomba con el motor y la instrumentación asociada al equipo.

16
Figura 1.3: a) Fotografía bomba de inyección, b) Fotografía motor, c) Dibujo esquemático de la bomba y el motor.
Fuente: Visita de Campo El motor de cada bomba es marca SIEMENS HORIZONTAL MEDALLION, con una potencia nominal de 1500 HP, alimentado a 4160V (176 Amp), de tres fases, 60 Hz, con velocidad nominal de 3600 rpm. La cámara de empuje está compuesta de una carcasa que contiene el eje que conecta la bomba con el motor a través de los sellos y rodamientos, permitiendo transmitir el torque del motor hacia la bomba. Las líneas de succión de las bombas de inyección, son tubería en Carbon Steel ANSI 150RF Sch40 de 10” con reducción a 8” en la succión de la bomba, con una presión de diseño de 285 psig. Las líneas de descarga de las bombas son en tubería Carbon Steel ANSI 1500 RTJ Sch160 con presión de diseño 3705 psig de 8”, a la descarga de la bomba también se cuenta con una línea de 4” para la recirculación hacia el tanque de cabeza.

17
En la siguiente gráfica se presenta la curva de la bomba de caudal contra cabeza a 3500 rpm y 3600 rpm, y la potencia de la bomba para los diferentes valores de flujo y presión. Figura 1.4: Curva de las bombas de inyección H vs. Q a 3600 rpm
Fuente: Centrilift El punto de mejor operación de la bomba, obteniendo una eficiencia de entre 68% y 71% es en valores cercanos a 30.000 BPD y 2000 psi. Todas las bombas de inyección descargan en un cabezal de recolección de 16” que posteriormente conduce el flujo bombeado a la línea principal de inyección a pozos.
1.2.2. Instrumentación del sistema de bombeo
La instrumentación asociada a cada sistema individual de bombeo se describe a continuación:

18
• Válvula de alivio de presión en el cabezal de succión: Permite aliviar la presión de succión debido a flujo reverso a través de las bombas.
• Manómetro en el cabezal de succión: Indicador de presión en sitio.
• Interruptor de flujo mínimo: Apaga el sistema de bombeo cuando por muy
bajo flujo, cuando se tienen caudales inferiores a 26.000 BPD.
• Indicador/Transmisor de Presión Diferencial en el filtro de succión: Genera una alarma cuando se tiene una diferencia de presiones superior a 15 psig entre la entrada y la salida del filtro de succión.
• Manómetro en la línea de descarga: Indicador de presión en sitio.
• Interruptor de muy alta presión. Apaga el sistema de bombeo por muy alta
presión, cuando la presión de descarga supera los 2300 psig.
• Interruptor de muy baja presión. Apaga el sistema de bombeo por muy baja presión, cuando la presión de descarga es inferior a 1500 psig.
• Transmisor de Presión en línea de descarga: Indicación remota de presión
en la línea de descarga, genera alarmas para apagado del sistema por muy alta o muy baja presión.
• Transmisor de Flujo en línea de descarga: Transmisor tipo platina de
restricción ubicada en la línea de descarga de cada bomba, permite indicación remota del flujo de descarga y genera alarmas para apagado del sistema por muy bajo flujo.
• Válvula de alivio de presión en la descarga: Permite aliviar la presión de
descarga debido a muy alta presión, con set a 2244 psig.
• Válvula de control - presión de descarga: Controla la presión de la descarga de la bomba en los niveles establecidos por el sistema de control.
• Válvula de control - Recirculación: Protege la bomba recirculando el flujo
hacia el tanque de cabeza, actualmente cumple funciones de control para alivio por muy alta presión.
• Válvula Motorizada en línea de descarga: Genera un aislamiento positivo de la línea para labores de mantenimiento, y actúa dentro del heurístico de arranque del sistema.

19
Figura 1.5: Diagrama P&ID – Línea de bombeo – Planta PIA6
Fuente: Oxy Andina – Manual de Arranque Temprano PIA6
20
1.3. CONTROL DEL SISTEMA DE BOMBEO
El fabricante de las bombas recomendó a los ingenieros de proceso que participaron en el diseño de la planta, que los valores de la presión y el flujo de la descarga, deben mantenerse tan constantes y cercanos como sea posible al punto de mayor eficiencia de la bomba. Como se dijo anteriormente dentro de la curva de operación de las bombas, el punto de mayor eficiencia esta en valores cercanos a 2000 psig y 30.000 BPD. Por lo tanto el sistema de control de las bombas fue concebido en la ingeniería conceptual con dos lazos de control: un lazo de control de presión y un lazo de control de flujo mínimo, los cuales permiten mantener las condiciones de presión y flujo en valores cercanos al punto de mayor eficiencia de la bomba, y garantizar la seguridad de los elementos que hacen parte del sistema de bombeo.
1.3.1. Lazo de control de presión de descarga
Cada bomba de inyección cuenta con una válvula de control de presión (PCV-) localizada aguas abajo de la descarga, justo antes de ingresar al cabezal de recolección. El lazo cuenta con un transmisor de presión que envía una señal a un PLC ubicado en el cuarto de control el cual controla la apertura de la válvula de control para mantener la presión en un punto de operación de 2000 psig. El cabezal de inyección general a pozos está estimado para operar a 1800 psig dependiendo del número de bombas en servicio y contando con presiones estables a la salida de la planta de inyección PIA5, por lo que en la ingeniería conceptual se estima que con esas condiciones y a la presión de operación del sistema, se tengan flujos de descarga cercanos a los 30.000 barriles por día. La válvula de control que hace parte de este lazo, es una válvula tipo globo marca FISHER de 4”, la cual está conectada a la línea de descarga de 8” mediante una conexión bridada con reducciones.
1.3.2. Lazo de control de flujo mínimo / alta presión
A la descarga de la bomba se cuenta con un transmisor de flujo y justo después se tiene una línea de recirculación de 4”, que conecta a una línea general de recirculación a los tanques de cabeza, en dicha línea se cuenta con una válvula de control. En la ingeniería conceptual ésta válvula de control (FCV-) hace parte de un lazo de control de flujo mínimo, que permitiría mantener los valores del flujo por encima de 26.000 BPD, garantizando la operación de la bomba en presiones seguras y evitando un posible daño por operar en la región de mínimo flujo y alta presión. Pero actualmente está válvula hace parte de un lazo de recirculación de agua para evitar sobrepresiones del sistema, el cual funciona mediante un control

21
on/off que actúa ante presiones superiores a 2100 psi, controlando a través de la apertura y cierre escalonado de la válvula, y cuyos escalones son equivalentes al 2% de la apertura. La señal del transmisor se envía a un PLC ubicado en el cuarto de control, el cual controla la apertura de la válvula de control en la línea de recirculación manteniendo el flujo por encima del valor mínimo evitando una sobrepresión del sistema. La válvula de control para este lazo, es igualmente de tipo globo marca FISHER de 4”. En este caso está montada sobre la línea de 4” de recirculación al tanque. En el Anexo 2 se puede ver la hoja de especificación de esta válvula, y se pueden observar las diferencias que existen en las especificaciones entre las dos válvulas de control del sistema. Figura 1.6 Fotografía lateral válvulas PCV y FCV – Línea de bombeo – Planta PI6
Fuente: Visita de Campo

22
Figura 1.7 Fotografía frontal - Línea de descarga – Planta PI6A
Fuente: Visita de Campo
La sintonización de los controladores instalados en el sistema de control, fue realizada de forma empírica, y presenta falencias en el control de puntos críticos de operación, como lo son perturbaciones continuas, y regímenes de arranque de la bomba. Así mismo, la interacción entre controladores instalados es mínima, lo que genera conflictos entre las acciones de control de cada uno de ellos.
Se busca entonces identificar el comportamiento actual del sistema en lazo abierto, con el fin de proponer una serie de estrategias alternativas de control, a través del diseño de los controladores de los lazos que forman parte del sistema actual, los cuales fueron sintonizados de forma empírica en el start-up de planta. Lo que permitirá determinar la viabilidad de la implementación a nivel técnico, obteniendo algunos datos económicos para evaluar los beneficios que podrían obtenerse de la estrategia seleccionada.

23
2. OBJETIVOS - Identificar el comportamiento de un sistema individual de bombeo en
operación para inyección de agua, tanto en régimen permanente como en régimen de arranque, utilizando un método de identificación con base en históricos y/o tendencias del sistema de control.
- Proponer una técnica alternativa de control regulatorio que contemple el
mantenimiento de las condiciones de presión y flujo deseadas tanto en régimen permanente y régimen de arranque.
- Analizar los resultados del modelo diseñado a través de una simulación con un software matemático, que permita evaluar el comportamiento de la solución propuesta tanto en régimen permanente como en régimen de arranque del sistema.
- Proponer un método heurístico para la operación del sistema de control en los puntos críticos de arranque y parada del sistema, teniendo en cuenta la solución propuesta y los sistemas de seguridad existentes.
- Realizar una evaluación técnica y económica de la utilización de las
técnicas de control propuestas, teniendo en cuenta su aplicación en todas las bombas del sistema principal de inyección de la planta.

24
3. CARACTERIZACIÓN E IDENTIFICACIÓN DEL SISTEMA
3.1. LEVANTAMIENTO DE DATOS EN CAMPO Para efectos de obtener las curvas del comportamiento del sistema, se programó un levantamiento de tendencias en campo, para esto se contó con la supervisión del personal de operación de la planta. Las tendencias que se tomarón en campo, permiten encontrar las funciones de transferencia del sistema, las cuales son: Figura 2.1: Funciones de transferencia
Fuente: Elaboración de autores P1(s) /C(s) y F1(s)/C(s) relacionan la presión y el flujo de descarga en relación al porcentaje de apertura de la válvula de control de presión, mientras que P2(s) /C(s) y F2(s)/C(s) relacionada la presión y el flujo de descarga en relación al porcentaje de apertura de la válvula de recirculación.
3.1.1. Tendencias – Lazo de control de presión Inicialmente se configuró el sistema de control de presión con la válvula de recirculación en estado manual, y se programó un escalón en la válvula de control de presión PCV. El escalón programado fue del 5%, pasando de 41% a 46% de apertura de la válvula de control. En la siguiente Figura puede observarse el escalón aplicado.

25
Figura 2.2 Escalón – Válvula de control de presión
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6
El escalón generó cambios en los valores de presión y de flujo, los cuales se muestran en la Figura 9. Como puede observarse la presión de la línea de descarga de la bomba disminuye, mientras que el flujo aumenta, ante la apertura de la válvula de control.
Figura 2.3 Presión y flujo de descarga – Escalón válvula de control de presión
0 50 100 150 200 25040
45
50
55ESCALÓN - VÁLVULA DE CONTROL DE PRESIÓN
Tiempo ( x 500 ms )
%C
O

26
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6
3.1.2. Tendencias – Escalón Válvula de Recirculación Para obtener la respuesta del sistema tanto en presión como en flujo frente a cambios en el porcentaje de apertura de la válvula de recirculación FCV, se dejó en configuración manual el lazo de control de presión, y se programó un escalón en la válvula de recirculación. El escalón programado fue del 5%, y como la válvula de recirculación permanece cerrada, el escalón llevó a la válvula de una apertura del 0% al 5%, y posteriormente retornó a su estado de cierre total.
0 50 100 150 200 2501800
1850
1900
1950
2000
2050
2100PRESIÓN DE DESCARGA - ESCALÓN VÁLVULA DE CONTROL DE PRESIÓN
Tiempo ( x 500 ms)
Pre
sión
( p
si )
0 50 100 150 200 2502.9
3
3.1
3.2
3.3
3.4
3.5x 10
4 FLUJO DE DESCARGA - ESCALÓN VÁLVULA DE CONTROL DE PRESIÓN
Tiempo ( x 500 ms )
Flu
jo (
BP
D )

27
En la siguiente gráfica puede observarse el escalón aplicado. Figura 2.4 Escalón – Válvula de recirculación
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6
Al igual que con la válvula de control de presión, el escalón en la válvula de recirculación generó cambios en los valores de presión y de flujo, menores que los generados por la válvula de control de presión.
0 100 200 300 400 500 600-5
0
5
10
15
X: 109Y: 0
ESCALÓN - VÁLVULA DE RECIRCULACIÓN
Tiempo ( x 500 ms )
% C
O
X: 110Y: 5

28
Figura 2.5 Presión y flujo de descarga – Escalón válvula de recirculación
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6
3.2. FUNCIÓN DE TRASNFERENCIA P1(s)/C(s) Para identificar el comportamiento de la presión de descarga, frente al porcentaje de apertura de la válvula de control, asumimos que se trata de un sistema de segundo orden teniendo en cuenta las características de la curva, y tomamos algunos puntos sobre la curva real, como se muestra en la siguiente gráfica.
0 100 200 300 400 500 6001975
1980
1985
1990
1995
2000
2005
2010PRESIÓN DE DESCARGA - ESCALÓN VÁLVULA DE RECIRCULACIÓN
Tiempo ( x 500 ms )
Pre
sión
( p
si )
0 100 200 300 400 500 6003
3.05
3.1
3.15x 10
4 FLUJO DE DESCARGA - ESCALÓN VÁLVULA DE RECIRCULACIÓN
Tiempo( x 500 ms )
flujo
( B
PD
)
29
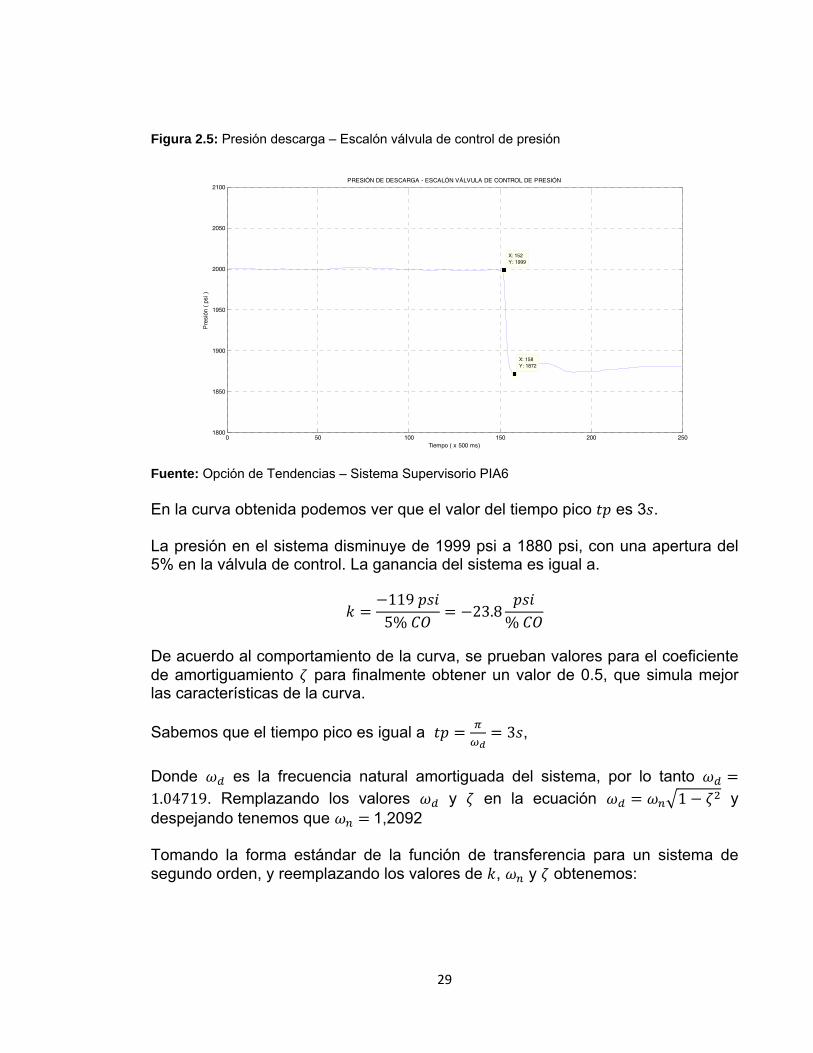
Figura 2.5: Presión descarga – Escalón válvula de control de presión
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6
En la curva obtenida podemos ver que el valor del tiempo pico es 3 . La presión en el sistema disminuye de 1999 psi a 1880 psi, con una apertura del 5% en la válvula de control. La ganancia del sistema es igual a.
119 5% 23.8 %
De acuerdo al comportamiento de la curva, se prueban valores para el coeficiente de amortiguamiento para finalmente obtener un valor de 0.5, que simula mejor las características de la curva. Sabemos que el tiempo pico es igual a 3 , Donde es la frecuencia natural amortiguada del sistema, por lo tanto 1.04719. Remplazando los valores y en la ecuación 1 y despejando tenemos que 1,2092 Tomando la forma estándar de la función de transferencia para un sistema de segundo orden, y reemplazando los valores de , y obtenemos:
0 50 100 150 200 2501800
1850
1900
1950
2000
2050
2100
X: 152Y: 1999
PRESIÓN DE DESCARGA - ESCALÓN VÁLVULA DE CONTROL DE PRESIÓN
Tiempo ( x 500 ms)
Pre
sión
( p
si )
X: 158Y: 1872

30
34.791.209 1.462
Esta es la función de transferencia que relaciona la presión de descarga, en relación al porcentaje de apertura de la válvula de control. Utilizando Simulink de Matlab podemos simular la curva de respuesta de la función de transferencia ante un escalón unitario. Figura 2.6: Presión descarga – Escalón válvula de control de presión – Respuesta Real Vs Simulada y Diagrama Simulink
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6 y Simulink de Matlab
3.3. FUNCIÓN DE TRANSFERENCIA F1(s)/C(s) Para obtener la función de transferencia que relaciona el flujo de descarga, ante una apertura de la válvula de control de presión, observamos las características de respuesta. Es posible determinar que la respuesta obedece a un sistema de
0 50 100 150 200 2501800
1850
1900
1950
2000
2050
2100
RESPUESTA REAL VS RESPUESTA SIMULADAPRESIÓN DE DESCARGA - ESCALÓN VÁLVULA DE CONTROL DE PRESÓN
Tiempo ( x 500 ms )
Pre
sión
( p
si )
Transfer Fcn
-34 .79
s +1.209 s+1.4622
To Workspace
simout
StepScope
Constant
2000
Add

31
primer orden, por tal motivo, utilizamos la metodología de identificación del Dr. Cecil Smith. Para obtener los parámetros primero se encuentra el cambio de la salida del sistema entre su estado inicial y el estado estable ∆Cs.
∆ En la gráfica de la respuesta real del sistema, obtenemos los valores correspondientes. Entonces: ∆ 33.561 30.385 2.976 Sabemos que el valor de es:
32
Donde es el tiempo donde la curva obtiene un valor igual a 0.283 · ∆ , y
es el tiempo donde la curva obtiene un valor igual a 0.632 · ∆ . Entonces:
0.283 · ∆ 0.283 2976 31.427 0.632 · ∆ 0.632 2976 32.465
Y los tiempos y son:
1 2

32
Figura 2.7: Flujo de descarga – Escalón válvula de control de presión
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6 Entonces es:
32 2 1
1.5 Para la ganancia tomamos la siguiente expresión, que relaciona el valor de la salida (flujo BPD) con el valor de la entrada (Porcentaje de apertura %CO).
∆%
2976 5% 595 %
Reemplazando los valores de y en la forma estándar de los sistemas de primer orden, tenemos la función de transferencia que relaciona los cambios en flujo, en relación a los cambios en el porcentaje de apertura de la válvula de control.
5951.5 1
0 50 100 150 200 2502.9
3
3.1
3.2
3.3
3.4
3.5x 10
4
X: 152Y: 3.039e+004
FLUJO DE DESCARGA - ESCALÓN VÁLVULA DE CONTROL DE PRESIÓN
Tiempo ( x 500 ms )
Flu
jo (
BP
D )
X: 202Y: 3.358e+004
X: 156Y: 3.238e+004
X: 154Y: 3.137e+004

33
Utilizamos Simulink de Matlab podemos simular la curva de respuesta con la función de transferencia encontrada. Figura 2.8: Flujo de descarga – Escalón válvula de control de presión – Respuesta Real Vs Simulada y Diagrama Simulink
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6 y Simulink de Matlab
3.4. FUNCIÓN DE TRANSFERENCIA P2(s)/C(s) Para identificar la función de transferencia, asumimos que también se trata de un sistema de segundo orden teniendo en cuenta las características de la curva. En este caso, en la primera parte de la curva, cuando el escalón es positivo, la tendencia no esta tan clara, por lo cual para se tomará la segunda parte cuando el escalón es negativo, cuidándonos de incluir el signo adecuado en la ganancia del sistema.
0 50 100 150 200 2502.8
2.9
3
3.1
3.2
3.3
3.4
3.5
3.6x 10
4RESPUESTA REAL VS. RESPUESTA SIMULADA
FLUJO DE DESCARGA - ESCALÓN VÁLVULA DE CONTROL DE PRESIÓN
Tiempo ( x 500 ms )
Flu
jo (
BP
D )
Transfer Fcn
595
1.5s+1
To Workspace
simout
StepScope
Constant
30385
Add

34
Figura 2.9: Presión de descarga – Escalón válvula de control de recirculación
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6
En la curva obtenida podemos ver que el valor del tiempo pico es 7 . La ganancia del sistema es igual a.
17 5% 3.4 %
De acuerdo al comportamiento de la curva, se prueban valores para el coeficiente de amortiguamiento , en este caso, la forma de la curva es más aplacada, y el sobresalto es mínimo, por lo cual se toma un valor de 0.7 para el coeficiente de amortiguamiento. Sabemos que el tiempo pico es igual a 7 , por lo tanto 0.4487.
Remplazando los valores y en la ecuación 1 y despejando tenemos que 0.4519 Tomando la forma estándar de la función de transferencia para un sistema de segundo orden, y reemplazando los valores de , y obtenemos:
0.6940.633 0.2043
Esta es la función de transferencia que relaciona la presión de descarga, en relación al porcentaje de apertura de la válvula de control.
0 100 200 300 400 500 6001975
1980
1985
1990
1995
2000
2005
2010
X: 407Y: 1981
PRESIÓN DE DESCARGA - ESCALÓN VÁLVULA DE RECIRCULACIÓN
Tiempo ( x 500 ms )
Pre
sión
( p
si )
X: 422Y: 1999

35
Figura 2.10: Presión de descarga – Escalón válvula de recirculación – Respuesta Real Vs Simulada y Diagrama Simulink
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6 y Simulink de Matlab
3.5. FUNCIÓN DE TRANSFERENCIA F2(s)/C(s)
Para obtener la función de transferencia que relaciona el flujo de descarga, ante una apertura de la válvula de recirculación, también observamos las características de respuesta del sistema en lazo abierto, llegando a la conclusión de que la curva obtenida obedece al comportamiento de un sistema de primer orden. Para obtener los parámetros primero se encuentra el cambio de la salida del sistema entre su estado inicial y el estado estable ∆Cs.
300 350 400 450 500 550 6001975
1980
1985
1990
1995
2000
2005
2010
RESPUESTA REAL VS RESPUESTA SIMULADAPRESIÓN DE DESCARGA - ESCALÓN VÁLVULA DE RECIRCULACIÓN
Tiempo ( x 500 ms )
Pre
sión
( p
si )
Transfer Fcn
-0.6946
s +0.633 s+0.20432
To Workspace
simout
StepScope
Constant
1981
Add

36
∆ Entonces de la curva obtenemos los datos y tenemos que: ∆ 31.055 30.454 601 Sabemos que el valor de es:
32
Donde es el tiempo donde la curva obtiene un valor igual a 0.283 · ∆ , y
es el tiempo donde la curva obtiene un valor igual a 0.632 · ∆ . Entonces:
0.283 · ∆ 0.283 601 30.624 0.632 · ∆ 0.632 601 31.833
Y los tiempos y son Figura 2.11: Flujo de descarga – Escalón válvula de control de recirculación
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6
3.5 5
0 50 100 150 200 250 300 350 4003
3.05
3.1
3.15x 10
4
X: 240Y: 3.106e+004
FLUJO DE DESCARGA - ESCALÓN VÁLVULA DE RECIRCULACIÓN
Tiempo( x 500 ms )
flujo
( B
PD
)
X: 113Y: 3.045e+004
X: 123Y: 3.09e+004
X: 120Y: 3.063e+004

37
Entonces es:
32 5 3.5
2.25 Para la ganancia tomamos la siguiente expresión, que relaciona el valor de la salida (flujo BPD) con el valor de la entrada (Porcentaje de apertura %CO).
∆%
601 5% 120.2 %
Reemplazando los valores de y en la forma estándar de los sistemas de primer orden, tenemos:
120.22.25 1
La expresión anterior relaciona los cambios en flujo de descarga, en relación a los cambios en el porcentaje de apertura de la válvula de recirculación. Utilizamos Simulink de Matlab podemos simular la curva de respuesta: Figura 2.12: Flujo de descarga – Escalón válvula de control de recirculación
0 100 200 300 400 500 600
3.03
3.04
3.05
3.06
3.07
3.08
3.09
3.1
3.11
3.12
3.13x 10
4
Tiempo ( x 500 ms )
Flu
jo (
BP
D )
RESPUESTA REAL VS. RESPUESTA SIMULADAFLUJO DE DESCARGA - ESCALÓN VÁLVULA DE RECIRCULACIÓN

38
Fuente: Opción de Tendencias – Sistema Supervisorio PIA6 y Simulink de Matlab
Transfer Fcn
120 .2
2.25s+1
To Workspace
simoutStep1
Step
Scope
Constant
30454
Add1Add

39
4. ANALISIS Y DISEÑO DE LOS CONTROLADORES En el capítulo 1 se realizó la descripción general del sistema de control de bombeo de Inyección y se enmarcaron dos lazos de control, el de presión a la descarga general de la bomba y el lazo de recirculación por sobrepresión. El objetivo de éste capítulo es diseñar dos controladores para éstos lazos de control con base a las funciones de transferencia dimensionadas anteriormente. El diseño de los dos controladores dará paso a analizar el sistema desde dos perspectivas. Inicialmente se analizará el sistema desde la operación de la bomba en régimen permanente, en donde se estudian las variables de proceso que intervienen en el sistema, el comportamiento de los elementos finales de control, las perturbaciones que pueden afectar el sistema de control y la interacción de los dos lazos de control objeto de estudio. De igual manera se estudiará el sistema desde la perspectiva en régimen de arranque, para observar su comportamiento fundamentado en un heurístico que garantice condiciones de trabajo seguras.
4.1. DEFINICIÓN DE LOS CONTROLADORES A UTILIZAR
Analizando la dinámica de operación de las bombas a través de su curva característica (ver Figura 1.4) se observa que las variables de flujo y presión de descarga están directamente relacionadas. Esa relación permite establecer entonces, una variable principal para controlar las condiciones del sistema el régimen de eficiencia deseado. En las estrategias a estudiar en el Capitulo 4, no se concibe un lazo de flujo mínimo como se presenta en ingeniería conceptual, sino que se propone utilizar solo la variable presión como elemento de referencia para el diseño de los dos controladores, que finalmente permitirán mantener condiciones de flujo y presión en niveles de seguridad y eficiencia aceptables. Con base en el anterior criterio, los controladores se diseñaran con las funciones de transferencia de presión, y permitirán entonces estructurar las estrategias que se proponen en el siguiente capítulo, las cuales presentarán un componen de interacción entre los elementos de control instalados, como se muestra en la siguiente figura.

40
Figura 3.1 Diagrama – Estrategia básica
Fuente: Elaboración de autores
De ésta manera llamaremos P1(s) a la Función de transferencia de Presión por excitación de PCV y P2(s) la Función de transferencia de Presión por excitación de la válvula de recirculación,
34.79² 1.209 1.462
0.6946 0.633 0.2043
La metodología que se utilizará para diseñar cada uno de los controladores está basada en el comportamiento de las funciones de transferencia en lazo cerrado para observar su estabilidad y las características de su respuesta. Con base a los resultados encontrados, se utilizará la herramienta de control Matlab – Sisotool1 para los controladores a la mejor respuesta, basado en la reubicación de polos en el plano S.
Figura 3.2 Diagrama - lazo de control para presión de descarga con función de transferencia P1(s)
Fuente: Elaboración de autores
1 La herramienta Sisotool de Matlab nos permite analizar el lugar de raíces y realizar acondicionamiento de parámetros de sintonía de controladores PID

41
Figura 3.3 Diagrama - lazo de control para presion de descarga con función de transferencia P2(s)
Fuente: Elaboración de autores
4.2. CONTROLADOR PARA P1(s)
Para encontrar los parámetros del controlador encargado de controlar la presión a la descarga de la bomba, en donde la entrada es el transmisor de presión aguas arriba de la válvula, y cuya salida es el porcentaje de control aplicado a la válvula de control PCV, se hace necesario observar el comportamiento de ésta función de transferencia en lazo cerrado.
1
34.79
² 1.209 1.462
1 34.791.209 1.462
34.79
34.791. 209 1. 462 1 ² 1. 209 1. 462
La Ecuación Característica resultante es:

42
Figura 3.4 Ubicación de polos en lazo cerrado de la función de transferencia P1(s)
Fuente: Sisotool - Matlab
La ubicación de las raíces observadas evidencia que el sistema retroalimentado con ganancia igual a 1 presenta un comportamiento inestable y ante una entrada escalón unitario el sistema tiende a infinito. Lo que explica la necesidad de un controlador en la retroalimentación para mejorar el sistema a un comportamiento estable Figura 3.5 Comportamiento de P1(s) ante entrada escalón unitario
Fuente: Sisotool - Matlab

43
Como bien es sabido, el Control PID2 es el tipo de control más conocido y utilizado dentro de los procesos industriales. Adicionalmente se cuenta con una plataforma actualmente donde se ejecutan las rutinas de programación las herramientas de control regulatorio, que limita a trabajar sobre bloques pre-programados tipos PID, es por esto que se decidió incorporar este tipo de controladores en el estudio, ya que facilitaría una posible implementación en campo. Para mejorar la estabilidad del sistema retroalimentado y permitir que siga referencias, se acondiciona un controlador PID calculado a través de la herramienta de Matlab – Sisotool3 con el ánimo de reubicar los polos del sistema para lograr un comportamiento estable. Figura 3.6 Ecuación PID resultante calculada en SISOTOOL para P1(s)
Fuente: Sisotool - Matlab
A continuación se analiza la estabilización del sistema en lazo cerrado, pero con el compensador previamente encontrado para verificar la veracidad de la ecuación calculada anteriormente:
1
34.79
² 1.209 1.462 0.062917 1 0.66 0.76
1 34.79² 1.209 1.462 0.062917 1 0.66 0.76
2. 1889 0.76 ² 0.66 1
2. 18891. 209 1. 462 0.76 ² 0.66 1 1 ² 1. 209 1. 462
2 Control Proporcional, Integral y Derivativo

44
La ecuación característica resultante obtenida es:
Figura 3.7 Ubicación de polos en lazo cerrado de la función de transferencia P1(s) con el controlador PID optimizado
Fuente: Sisotool - Matlab
Con el compensador PID, las raíces ya se encuentran sobre en el plano real negativo y ahora la respuesta ante una entrada escalón unitaria el sistema se estabiliza con un comportamiento críticamente subamortiguado siguiendo una referencia.

45
Figura 3.8 Comportamiento de P1(s) ante entrada escalón unitario con el controlador PID
Fuente: Sisotool - Matlab
Finalmente las constantes de sintonización optimizadas son:
0.062917 0.76 ² 0.66 1 4. 7817 10⁻² ² 4. 1525 10⁻² 6. 2917 10⁻²
Siendo U(t) la ecuación que representa el controlador PID igualamos con la optimizada
4. 7817 10⁻² ² 4. 1525 10⁻² 6. 2917 10⁻²
Obteniendo:
4. 7817 10⁻² 4. 1525 10⁻² 6. 2917 10⁻²
4.3. CONTROLADOR PARA P2(s) Utilizando la misma metodología para calcular el controlador P1(s), se dimensiona el controlador P2(s) en la cual la entrada del sistema es el transmisor de presión a la descarga ubicado aguas arriba de la válvula de control de recirculación FCV, y cuya salida es el porcentaje de control hacia la válvula de recirculación.

46
1
0.6946
0.633 0.20431 0.6946
0.633 0.2043
34.79
34.791. 209 1. 462 1 ² 1. 209 1. 462
La Ecuación Característica resultante es:
Encontrando los polos de la ecuación anterior, se tiene un polo positivo y uno negativo, lo que significa que el sistema retroalimentado con ganancia igual a 1 es inestable tal como lo muestran las siguientes ilustraciones
Figura 3.9 Ubicación de polos en lazo cerrado de la función de transferencia P2(s) con el controlador PID
Fuente: Sisotool – Matlab
47
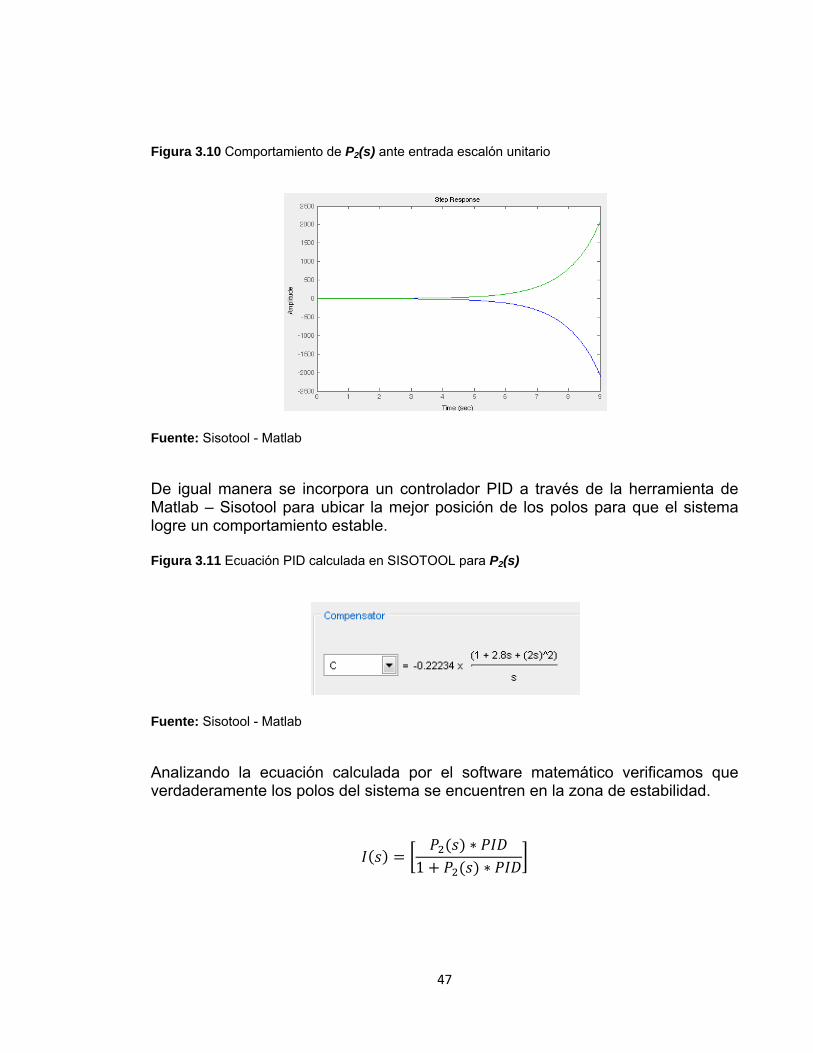
Figura 3.10 Comportamiento de P2(s) ante entrada escalón unitario
Fuente: Sisotool - Matlab
De igual manera se incorpora un controlador PID a través de la herramienta de Matlab – Sisotool para ubicar la mejor posición de los polos para que el sistema logre un comportamiento estable.
Figura 3.11 Ecuación PID calculada en SISOTOOL para P2(s)
Fuente: Sisotool - Matlab
Analizando la ecuación calculada por el software matemático verificamos que verdaderamente los polos del sistema se encuentren en la zona de estabilidad.
1

48
0.6946 0.633 0.2043 0.22234 1 2.8 2
1 0.6946 0.633 0.2043 0.22234 1 2.8 2
0.10727 2 ² 2. 8 1
0.107270.633 0.4903 2 2. 8 1 1 ² 0.633 0.4903
La ecuación característica resultante obtenida es:
Figura 3.12 Ubicación de polos en lazo cerrado de la función de transferencia P2(s) con el controlador PID
Fuente: Sisotool - Matlab
Y la respuesta ante una entrada escalón, obtenemos un comportamiento críticamente subamortiguado y estable, tal como lo muestra siguiente figura.

49
Figura 3.13 Comportamiento de P1(s) ante entrada escalón unitario con el controlador PID
Fuente: Sisotool - Matlab
Finalmente las constantes de sintonización encontradas son:
0.22234 1 2.8 2 ² 0.44468 ² 0.62255 0.22234
Siendo u(t) la ecuación que representa el controlador PID igualamos con la optimizada
0.44468 ² 0.62255 0.22234
Obteniendo:
0.44468 0.62255 0.22234

50
5. ESTRATEGIAS DE CONTROL
En el anterior capitulo se desarrolló el cálculo de los controladores para las válvulas de presión de descarga y de recirculación. En éste Capítulo se ilustra el desarrollo de las simulaciones de las posibles estrategias de control a implementar tanto en régimen estable como en arranque. Cada una de las estrategias de control propuestas se valida a través de una simulación por medio de un protocolo de pruebas, que consiste en someter a cada una de las estrategias a diferentes perturbaciones para analizar su comportamiento en el sistema. En las diferentes simulaciones presentadas se identificarán las variables más representativas para nuestro estudio, como lo son el esfuerzo de cada una de las válvulas y el comportamiento de la presión de descarga. 5.1. ESTRATEGIAS DE CONTROL EN REGIMEN ESTABLE
Para realizar las simulaciones del control en régimen estable es necesario tener en cuenta que el sistema ya se encuentra operativo y por ende la válvula de control de presión ya tiene un porcentaje de apertura que permite mantener la presión de descarga, este valor es comúnmente conocido como BIAS4. De igual manera para cada simulación también es necesario restringir la operación de la válvula por medio de limitadores con el ánimo de que las válvulas operen en un rango entre 0% y 100%. Las funciones de transferencia P1(s) y P2(s) en el diagrama general ilustrado en la figura 4.3, se encuentran encapsuladas en bloques independientes con el objetivo de no saturar el diagrama de bloques para su mejor comprensión.
Figura 4.1 Función de transferencia P1(s) encapsulada - Simulink
Fuente: Matlab - Simulink
4 Valor de la salida de un controlador cuando el error es 0

51
Figura 4.2 Función de transferencia P2(s) encapsulada - Simulink
Fuente: Matlab – Simulink
Las perturbaciones en este tipo de sistemas son de carácter continuo con retardos; es decir, no obedecen a escalones intempestivos, ni a cambios bruscos de presión, sino más bien siguen dinámicas de primer orden, como si se tratara de obstrucciones generadas por una válvula de control que modificara sus condiciones de apertura, afectando las variables del proceso aguas arriba. Para simular este comportamiento se generan retardos de primer orden a manera de entradas externas del sistema, de acuerdo a una función definida.
Figura 4.3 Simulación de Perturbaciones del Sistema
Fuente: Matlab - Simulink
5.1.1. Estrategia 1: Ejecución simultanea de dos controladores para dos válvulas de control
La primera opción sobre la estrategia de control, se basa en la ejecución simultánea de los dos controladores tal como lo muestra la siguiente Figura:
0 50 100 150 200 250 300 350 4000
500
1000
1500
Tiempo (Seg)
Pre
sión
con
tinua
acu
mul
ada
PERTUBACIÓN NO CONTINUA - UN SOLO RETARNO
0 50 100 150 200 250 300 350 4000
500
1000
1500
Tiempo (Seg)
Pre
sión
con
tinua
acu
mul
ada
PERTURBACIÓN CONTINUA ACUMULADA

52
Figura 4.4 Diagrama de bloques representativo de los dos controladores en marcha simultanea
Fuente: Elaboración de autores
Como se puede observar, cada uno de los controladores opera sobre la función de transferencia respectiva, sumada a una perturbación generada por el sistema, como lo puede ser una sobrepresión en la línea general de descarga, el encendido o apagado de una de las bombas del sistema general de inyección, etc. La simulación que representa el diagrama de bloques se muestra a continuación:
Figura 4.5: Diagrama de bloques representado en Simulink
Fuente: Matlab - Simulink

53
En el protocolo de pruebas se sometió inicialmente éste sistema a una perturbación no continua, y posteriormente a una serie de perturbaciones continuas. Figura 4.6: Comportamiento Presión de descarga con Perturbación no continua
Figura 4.7: Comportamiento de las Válvula de control con Perturbación no continua
Fuente: Matlab - Simulink
Se puede observar como las dos válvulas de control actual de forma simultánea desde el momento en que se genera la perturbación. Al tratarse de una perturbación no continua cuando la presión vuelve a 2000 psi, la válvulas permanecen sin variación.
90 100 110 120 130 140 1501980
1985
1990
1995
2000
2005
2010
2015
2020
Tiempo (s)
PS
I
COMPORTAMIENTO PRESION DE DESCARGA CON PERTURBACION NO CONTINUA
50 60 70 80 90 100 110 120 130 140 15010
20
30
40
50
60
70
80
90
Tiempo (s)
%C
V
VALVULA DE CONTROL DE PRESION CON PERTURBACION NO CONTINUA
50 60 70 80 90 100 110 120 130 140 150
-6
-4
-2
0
2
4
6
Tiempo (s)
%C
V
VALVULA DE RECIRCULACION CON PERTURBACION NO CONTINUA

54
Figura 4.8: Comportamiento Presión de descarga con perturbaciones continuas
Figura 4.9: Comportamiento de las Válvula de control con Perturbaciones continuas
Fuente: Matlab - Simulink
En el caso de la perturbación continua y acumulada, es posible observar que las dos válvulas actúan al tiempo, pero que la válvula PCV de control de presión, es la que inicialmente ejerce mayor peso en el control. Cuando el esfuerzo del la válvula de control de presión se mayor al 100% de apertura, y físicamente no puede aportar al control, la válvula de recirculación toma la responsabilidad total de la labor de control. Finalmente si las perturbaciones continúan, el sistema se volverá inestable y subirá la presión a valores críticos, donde actuaría el interruptor por muy alta presión, apagando la bomba. En esta estrategia, se tiene un flujo permanente de agua a través de la línea de recirculación.
50 100 150 200 250 300 350 400
1960
1980
2000
2020
2040
2060
Tiempo (s)
PS
I
PRESION DE DESCARGA CON PERTURBACIONES CONTINUAS
50 100 150 200 250 300 35010
20
30
40
50
60
70
80
90
100
110
Tiempo (s)
%C
V
VALVULA DE CONTROL DE PRESION CON PERTURBACIONES CONTINUAS
50 100 150 200 250 300 350 400-10
0
10
20
30
40
50
Tiempo (s)
%C
V
VALVULA DE RECIRCULACION CON PERTURBACIONES CONTINUAS

55
5.1.2. Estrategia 2: Ejecución escalonada de controladores
La segunda estrategia de control consiste en ejecutar los dos controladores, pero no de forma simultánea, sino escalonada. El controlador para la válvula de recirculación opera siempre y cuando el esfuerzo de la válvula de control de presión supera el 100% de apertura, y físicamente no pueda aportar al control de la variable.
Figura 4.10: Diagrama de bloques representativo de segunda estrategia de control
Fuente: Matlab – Simulink
La simulación en Simulink de ésta estrategia se presenta a continuación:

56
Figura 4.11: Comportamiento Presión de descarga con perturbación no continua – Segunda estrategia
Fuente: Matlab - Simulink
Fuente: Matlab – Simulink
50 100 150 200 250 300 350 4001980
1985
1990
1995
2000
2005
2010
2015
2020
Tiempo (s)
PS
I
COMPORTAMIENTO DE LA PRESION CON PERTURBACION NO CONTINUA

57
Figura 4.12: Comportamiento de las válvulas de control con Perturbaciones no continuas
Fuente: Matlab - Simulink
En este caso se puede observar que los valores pico de la respuesta, y los tiempos de estabilización son bastante similares a la estrategia 1. Lo que puede confirmar que la labor de control, la ejerce la válvula de control de presión ante perturbaciones no continuas, ya que la válvula de recirculación no actúa, porque el esfuerzo de la otra válvula no supera su capacidad de apertura.
Figura 4.13: Comportamiento Presión de descarga con perturbación continua – Segunda estrategia
Fuente: Matlab - Simulink
50 100 150 200 250 300 350 40020
25
30
35
40
45
50
55
60
65
70
Tiempo (s)
%C
VVALVULA DE CONTROL DE PRESION CON PERTURBACION NO CONTINUA
0 50 100 150 200 250 300 350 400-10
-8
-6
-4
-2
0
2
4
6
8
10
Tiempo (s)
%C
V
VALVULA DE RECIRCULACION CON PERTURBACION NO CONTINUA

58
Figura 4.14: Comportamiento de las Válvula de control con Perturbaciones continuas
Fuente: Matlab – Simulink
Para el caso de perturbaciones continuas, se puede observar que el esfuerzo de la válvula de control de presión llega a un punto en donde físicamente no puede aportar más al control, y cede su función a la válvula de recirculación. La válvula de recirculación genera una apertura hasta aproximadamente el 30%, y continuará la labor de control.
5.1.3. Estrategia 3: Un solo controlador con esfuerzo extendido
La tercera estrategia simulada consiste en un solo controlador y el esfuerzo extendido a las dos válvulas de control.
Figura 4.15: Diagrama de bloques representativo de la tercera estrategia de control

59
Fuente: Elaboración de autores
En este caso un solo controlador genera la salida de control, pero se extiende a los dos elementos finales disponibles en el sistema con los mismos parámetros. La condición para que actúe el segundo elemento final, es igualmente que el porcentaje de apertura de la válvula de control de presión llegue a su límite, y no sea capaz de aportar al control del sistema.
Figura 4.16: Comportamiento Presión de descarga con perturbación no continua
Fuente: Matlab - Simulink
Figura 4.17: Comportamiento Presión de descarga con perturbación no continua – Tercera estrategia
Fuente: Matlab – Simulink
70 80 90 100 110 120 130 140 1501980
1985
1990
1995
2000
2005
2010
2015
2020
Tiempo (s)
PS
I
COMPORTAMIENTO DE LA PRESION DE DESCARGA CON PERTURBACION CONTINUA

60
Figura 4.18: Comportamiento de las Válvula de control con Perturbación no continua
Fuente: Matlab – Simulink
Al igual que en la estrategia anterior, el control lo asume la válvula de control de presión para perturbaciones no continuas. La válvula de recirculación no actúa.
Figura 4.19: Comportamiento Presión de descarga con perturbaciones continuas– Tercera estrategia
Fuente: Matlab – Simulink
50 100 150 200 250 300 350 4000
10
20
30
40
50
60
70
80
90
100
Tiempo (s)
%C
VVALVULA DE PRESION DE DESCARGA CON PERTURBACION NO CONTINUA
0 50 100 150 200 250 300 350 400-5
-4
-3
-2
-1
0
1
2
3
4
5
Tiempo (s)
%C
V
VALVULA DE RECIRCULACION CON PERTURBACION NO CONTINUA
50 100 150 200 250 300 350 4001980
1985
1990
1995
2000
2005
2010
2015
2020
Tiempo (s)
PS
I
COMPORTAMIENTO DE LA PRESION DE DESCARGA CON PERTURBACIONES CONTINUAS

61
Figura 4.20: Comportamiento de las Válvula de control con Perturbaciones continuas
Fuente: Matlab – Simulink
Para perturbaciones continuas, el comportamiento cuando la perturbación sobrepasa los límites de esfuerzo de la válvula de control, presenta condiciones de menor offset, ya que el pico de la respuesta no supera los 2010 psi, mientras que en la estrategia 2, el pico supera los 2020 psi.
5.1.4. Análisis de las estrategias
El análisis y selección de la estrategia definitiva está relacionada con condiciones de eficiencia y estabilización. En términos de eficiencia hidráulica la estrategia No. 1 en donde ambos controladores se ejecutan al tiempo, no es aplicable debido a que para mantener la presión de descarga es necesario mantener un porcentaje de apertura en la válvula de recirculación, perdiendo así flujo para la inyección, y por ende disminuyendo al eficiencia de bombeo.
Para la estrategia No. 3 se estableció la operación de un solo controlador aplicable a las dos válvulas de control, aunque el sistema es estable, las acciones de control generadas por el PID pueden llegar a ser muy grandes para la capacidad de control que puede tener la válvula de recirculación, por lo tanto si se generan perturbaciones continuas que requieran acción de la válvula de recirculación generan acciones de control que se verían reflejadas en posibles sobreesfuerzos de la válvula de control de recirculación
0 50 100 150 200 250 300 35020
30
40
50
60
70
80
90
100
110
Tiempo (s)
%C
VVALVULA DE CONTROL DE PRESION CON PERTURBACIONES CONTINUAS
0 50 100 150 200 250 300 350 400
-10
0
10
20
30
40
50
60
70
Tiempo (s)
%C
V
VALVULA DE RECIRCULACION CON PERTURBACIONES CONTINUAS

62
Es entonces la estrategia No.2 la que más se ajusta a los requerimientos de eficiencia y respuesta ya que a pesar de que se ejecutan los dos controladores simultáneamente, el controlador de la válvula de recirculación está condicionado a operar cuando el esfuerzo de la válvula de control de presión de descarga supera el 100%. Para evitar que el componente integrador del PID de la válvula de control, continúe su acción integradora, mientras el control lo realice la otra válvula, es posible implementar un antiwind up, con el fin de evitar reacciones agresivas, cuando el PID de vuelva a retomar el control de la variable, claro está que cuando la válvula de control de presión retoma nuevamente el control, lo retoma en el mismo valor de apertura, es decir 100%, por lo tanto el efecto que puede tener el antiwind up puede ser mínimo.
5.2. ESTRATEGIAS DE CONTROL EN REGIMEN DE ARRANQUE
La estrategia utilizada para el control en régimen de arranque, toma su fundamento en la metodología actual, agregando cambios que mejoran las condiciones del arranque. La estrategia para régimen de arranque, se basa principalmente en arrancar el sistema en recirculación total, es decir con la válvula de recirculación al 100% de apertura, y controlar la presión de descarga a la bomba con la válvula de control de presión.
De igual manera es necesario definir un heurístico para la operación de la misma de tal forma que se garanticen condiciones de seguridad tanto para la bomba como al proceso de inyección en general.
5.2.1. Etapas propuestas para el arranque del sistema
• Encendido Local/Remoto de la bomba: El startup de la bomba se hace localmente en campo desde una terminal HMI o desde el cuarto de operaciones de la facilidad. Con el ánimo de evitar operaciones involuntarias, el sistema deberá ofrecer una alternativa de confirmación y retracción con el fin de iniciar el encendido de la bomba de lubricación
• Encendido Bomba de Lubricación: La bomba de lubricación que se encuentra en el cuerpo de la cámara de empuje de la bomba de inyección es el requisito más importante para iniciar el arranque de la rampa del motor eléctrico, todos los componentes mecánicos en la bomba deben estar lubricados por lo menos por 30 segundos para evitar daños mecánicos irreparables

63
• Apertura de Válvula Motorizada: La apertura de ésta válvula asegura habilitar la línea de descarga de la bomba ya que su función es realizar un aislamiento positivo de la línea en operación de mantenimiento. |
• Apertura 100% Válvula de Recirculación: Por efectos de seguridad en el arranque, es necesario que la bomba inicie recirculando hacia la línea del tanque de cabeza para evitar golpes de ariete y sobrepresiones que pueden afectar componentes del proceso tales como las válvulas de control y líneas de descarga y recirculación.
• Inicio Rampa de aceleración del motor eléctrico: El motor eléctrico desarrolla una rampa de aceleración programad desde el arrancador suave, y tarda 30 segundos en alcanzar las 3600rpm y cerca de 1300 HP tal como lo muestra la curva de la bomba (Capitulo 1).
• Inicio Control de Presión a la descarga: La válvula de control de descarga inicia su operación regulatoria para sostener los 2000psi, cuando esto ocurra, la válvula de recirculación inicia una operación de cierre proporcional en forma de rampas. El control de presión a la descarga debe estar asegurar mantener los 2000psi de trabajo.
• Ejecutar Lazo de Control Regulatorio para Válvula de Recirculación: Cuando la rampa de cierre haya terminado, es decir la válvula este 0% abierta, el sistema iniciará a operar con la estrategia de régimen estable.
5.2.2. Heurístico de arranque propuesto
Las condiciones iniciales de operación necesarias deben ser las siguientes:
Tabla 4.1: Condiciones Iniciales para arranque.
Variable Valor / Estado
PCV_ 0% ABIERTA
PCV_ 0% ABIERTA
MOV_ CERRADA
Fuente: Elaboración de autores
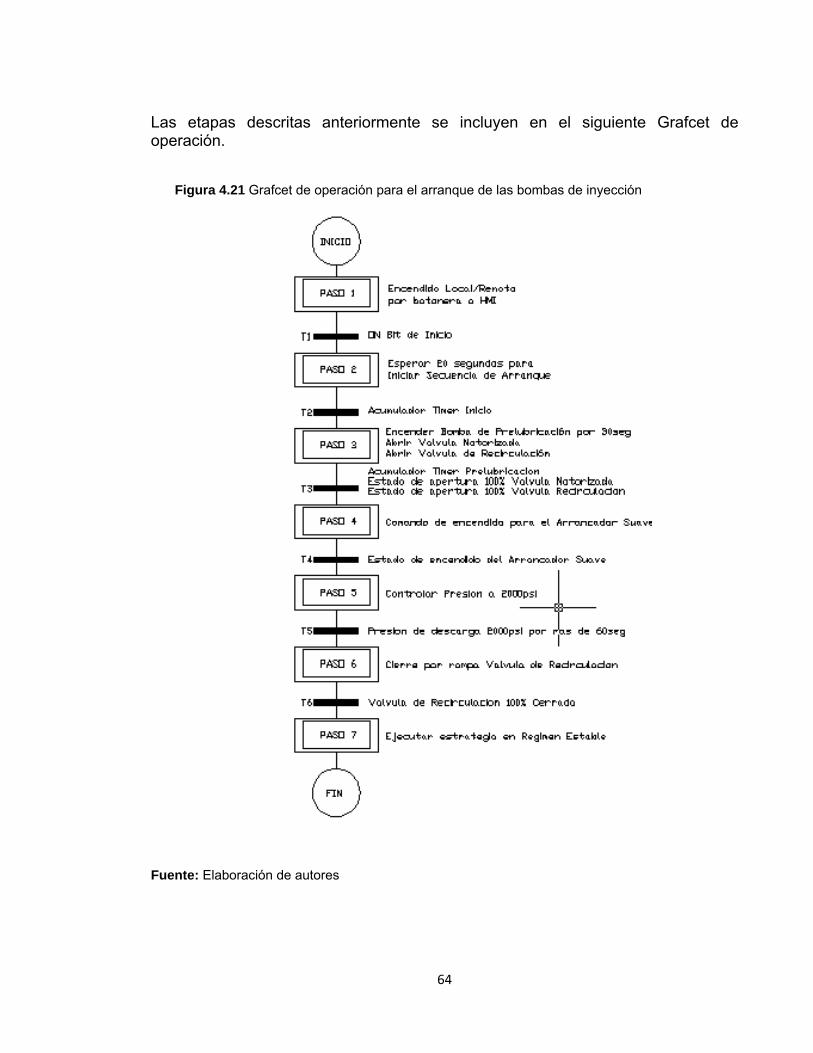
64
Las etapas descritas anteriormente se incluyen en el siguiente Grafcet de operación.
Figura 4.21 Grafcet de operación para el arranque de las bombas de inyección
Fuente: Elaboración de autores

65
4.1.1. Simulación de arranque propuesto Para soportar éste heurístico se realizo la simulación por medio de un diagrama de bloques en donde se observa el comportamiento del sistema en régimen de arranque
Figura 4.22: Diagrama de bloques para la simulación del arranque
Fuente: Elaboración de autores
Para la simulación del sistema en régimen de arranque fue necesario consultar los parámetros configurados en el arrancador suave para identificar el tiempo en el cual el motor desarrolla su potencia para llegar a los 2000 psi obteniendo que el tiempo de rampa de aceleración sea de 30seg. Tabla 4.2: Parámetros de configuración de la rampa de inicio del Arrancador Suave
Fuente: Occidental Andina LCC – Facilidades La Cira Infanta - 2010

66
La rampa de aceleración tiene el siguiente comportamiento en la presión de incio del sistema:
Figura 4.23: Comportamiento de la presión por la rampa de aceleración del Arrancador Suave
Fuente: Matlab - Simulink
Figura 4.24: Comportamientos de la presión por la rampa durante el arranque
Fuente: Matlab - Simulink
Es posible observar que la rampa del arrancador suave del motor genera un vertiginoso ascenso de la presión, en donde finalizada la rampa de 30 segundos,
0 20 40 60 80 100 120 140 160 180 200-500
0
500
1000
1500
2000
2500
3000
Tiempo (s)
PS
I
COMPORTAMIENTO DE LA RAMPA DE ACELERACION DEL MOTOR EN FUNCION DE LA PRESION
0 50 100 150 200 250 300 350 4000
500
1000
1500
2000
2500
Tiempo (s)
PS
I
COMPORTAMIENTO DE LA PRESION DURANTE EL ARRANQUE

67
inicia a actuar el lazo de control de presión. Una vez la presión llegue a 2000 psi, la válvula de recirculación inicia su protocolo de cierre programado, tal como se puede observar en la siguiente figura:
Figura 4.25: Comportamientos de las válvulas de presión y recirculación
Fuente: Matlab - Simulink
A medida que la válvula de presión va realizando su protocolo de cierre de acuerdo a escalones programados, la válvula de control va controlando la presión total del sistema manteniendo de igual forma la presión de la descarga.
0 50 100 150 200 250 300 35-20
0
20
40
60
80
100
VALVULA DE RECIRCULACION DURANTE EL ARRANQUE
0 50 100 150 200 2500
5
10
15
20
25
30
35
40
Tiempo (s)
%C
V
VALVULA DE PRESION DE DESCARGA EN REGIMEN DE ARRANQUE

68
6. CONTROL ACTUAL VS CONTROL PROPUESTO Para evaluar la viabilidad técnica de la implementación de la estrategia de control seleccionada, es necesario analizar el comportamiento general del sistema en relación a la estrategia actual de control, utilizando los parámetros de sintonía reales con los cuales operan los controladores del sistema de inyección en la planta PIA6. Actualmente la labor de control de la presión de la línea de descarga, la ejerce por completo el lazo de control de presión a través de la válvula PCV. Este lazo funciona mediante un controlado PI (Proporcional Integral). En el caso de la válvula de recirculación, como se explicó anteriormente, ésta solo opera en condiciones de sobrepresión.
6.1. CONTROL ACTUAL VS CONTROL PROPUESTO ANTE PERTURBACIONES NO CONTINUAS
Como se dijo en el Capitulo 1, la sintonización de los controladores en campo se realizó de forma empírica, y para obtener los parámetros es necesario remitirse al PIDSetup del software RSLogix de programación en campo. En la siguiente Figura, es posible ver cuáles son los parámetros actuales con los cuales funciona el controlador PI del sistema de una de las bombas de inyección. Figura 5.1: Pantalla PIDSetup RSLogix – Parámetros Control PI Actual
Fuente: RSLogix

69
Si simulamos el control PI con los parámetros actuales, tomando la función de transferencia encontrada para los valores de presión, podremos ver el comportamiento del control actual, con una perturbación igual a la establecida en los protocolos de prueba del Capítulo 4. Figura 5.2:Simulación – Presión de descarga control PI actual – Perturbación No Continua
Fuente: Matlab - Simulink Podemos observar que se obtienen valores pico de 9 psi el tiempo de estabilización es de aproximadamente 56 segundos, con una respuesta oscilante, propia de la ausencia del componente derivativo. Figura 5.3:Simulación – Presión de descarga control PID – Perturbación No Continua
Fuente: Matlab - Simulink
190 200 210 220 230 240 250 260 2701980
1985
1990
1995
2000
2005
2010
2015
2020
Pre
sión
(ps
i)
SIMULACIÓN - CONTROL PI ACTUAL
X: 200.5Y: 2009
X: 210.2Y: 2004
X: 220.1Y: 2002 X: 230.2
Y: 2001X: 240.2Y: 2000
90 100 110 120 130 140 150 160 1701980
1985
1990
1995
2000
2005
2010
2015
2020
PS
I
COMPORTAMIENTO DE LA PRESION ANTE UNA PERTURBACION NO CONTINUA
X: 104.5Y: 2004
X: 120.3Y: 2001
X: 110Y: 2003
X: 130.3Y: 2000

70
El resultado de la simulación con el control propuesto muestra que el offset es menor que con el control actual, así mismo el tiempo de estabilización es de aproximadamente 40 segundos. Por lo tanto, el control propuesto mejora las condiciones de respuesta del sistema ante las perturbaciones.
6.2. CONTROL ACTUAL VS CONTROL PROPUESTO ANTE PERTURBACIONES CONTINUAS
Si se simula el comportamiento del sistema con los parámetros de sintonía actuales para el control PI, se obtiene la siguiente Figura. Figura 5.4:Simulación – Presión de descarga control PI actual – Perturbación continua
Fuente: Matlab - Simulink Es posible observar entonces, que si se mantienen perturbaciones continuas el control actúa mientras la válvula de control de presión realiza su máximo esfuerzo, momento en el cual el lazo de control de presión no soporta la carga de las perturbaciones, y el sistema se vuelve inestable aumentando la presión de descarga. En ese punto, deberá actual la válvula de recirculación de acuerdo a la función programada mediante el control on/off para valores superiores a 2100 psi. Al igual que para la perturbación no continua, se observa el comportamiento oscilante de la respuesta. Si se observa nuevamente la Figura obtenida de la simulación, podemos ver que el control propuesto, responde mejor a condiciones de perturbaciones continuas, y que se necesitarían perturbaciones mas permanentes en el tiempo para lograr desestabilizar el sistema, momento en el cual la presión subiría hasta los valores
50 100 150 200 250 300 350 4001980
2000
2020
2040
2060
2080
2100
2120
2140
Tiempo (Seg)
Pre
sión
(ps
i)
COMPORTAMIENTO DE LA PRESIÓN DE DESCARGA ANTE UNA PERTUBACIÓN CONTINUA - CONTROL ACTUAL

71
de presión máxima, donde actuaría el interruptor de muy alta presión para realizar el shutdown de la bomba.

72
Figura 5.5: Simulación – Presión de descarga control PID – Perturbación continua
Fuente: Matlab - Simulink
6.3. CONTROL ACTUAL VS CONTROL PROPUESTO – ARRANQUE DEL SISTEMA
6.3.1. Análisis de un arranque exitoso – control actual Durante el arranque se encuentran diferentes puntos objeto de estudio los cuales están representados en gráficas de tendencias que se presentan a continuaciónas siguiente Figura muestra el comportamiento del control de un arranque exitoso con la técnica actual. En ella se puede observar los siguientes puntos críticos durante el proceso de arranque. El tiempo de estabilización de este arranque exitoso es (Ver Figura):
∆t Tf T ∆t 140s 16.4s
∆t 123.6s
50 100 150 200 250 300 350 4001980
1990
2000
2010
2020
2030
2040
2050
PS
I
COMPORTAMIENTO DE LA PRESION DE DESCARGA ANTE PERTURBACIONES CONTINUA

73
Figura 5.6:Arranque existo – Comportamiento de la presión – Control PI y heurístico actual
Fuente: Datos de campo – Supervisorio PI6 Punto A - Arranque inicial Comprendido entre el intervalo de tiempo (16.4s y 22.6s). Este intervalo representa gráficamente el tiempo que tarda el arrancador suave en alcanzar las 3600rpm. Como podemos observar en la figura, la rampa de aceleración generada por el motor causa un aumento agresivo de presión iniciando de 32,25psi a 1650psi aproximadamente, mientras que la válvula de control de presión abre tan solo un 2.9%, la recirculación cierra un 60% (40% de apertura), mediante un rampa de cierre programada de 0.9% de cierre por segundo. Figura 5.7:Arranque existo – Comportamiento de válvulas – Control PI y heurístico actual
Fuente: Datos de campo – Supervisorio PI6

74
Punto B - Disputa entre los controladores de presión y control programado de válvula de recirculación Como se puede observar en la siguiente Figura, una vez finaliza la rampa del arrancador suave del motor, la presión tiende hacia sus valores de referencia, pero mientras actual totalmente el control de presión para llevar a 2000 psi, los sobrepasos de la presión por encima de 2100 psi, generan inmediatamente que la válvula de recirculación actúe de acuerdo a su control on/off programado. Esto finalmente genera un conflicto entre los lazos de control existentes. Figura 5.8:Arranque existo – Disputa de controles – Control PI y heurístico actual
Fuente: Datos de campo – Supervisorio PI6 El comportamiento de las válvulas de control presión y recirculación, juega un papel muy importante a la hora de definir que variable es la ganadora de la disputa de estos dos controles, recordemos que el control de presión es regulatorio (PI), mientras que el de flujo es on/off (rampas de apertura y cierre al 2%). A pesar de que en ambos controles la variable de proceso es la presión, cada uno actúa por su propia cuenta evidenciando la disputa del control lo que puede ocasionar que la bomba se encuentre en puntos críticos de trabajo, causando calentamiento en el cuerpo mismo de la bomba y el progresivo deterioro de los elementos mecánicos de cada etapa. Así mismo este conflicto genera un aumento considerable de tiempo en el arranque, ya que el sistema demora mucho en encontrar la presión de trabajo. En la siguiente gráfica es posible observar el comportamiento de las válvulas de control de presión y de recirculación.

75
Figura 5.9: Arranque exitoso – Disputa de controles – Comportamiento de válvulas
Fuente: Datos de campo – Supervisorio PI6 Punto C - Estabilización de la presión Este intervalo corresponde a la zona donde la válvula de recirculación está completamente cerrada y la presión se acomoda a los valores de operación adecuados. Posterior a la disputa de controles, finalmente el control de presión lleva al sistema a los valores de presión adecuados, la válvula de recirculación se cierra completamente, y la válvula de control de presión iniciar su rutina de control normal.

76
Figura 5.10:Arranque existo – Estabilización de presión – Control PI y heurístico actual
Fuente: Datos de campo – Supervisorio PI6
Figura 5.11:Comportamiento de válvulas – Estabilización de presión – Control PI y heurístico actual
Fuente: Datos de campo – Supervisorio PI6

77
6.3.2. Arranque mediante control y heurístico propuesto Como se definió en el capitulo anterior, la respuesta del sistema en el arranque, se comporta de la siguiente forma. Figura 5.12:Comportamiento de válvulas – Estabilización de presión – Control PI y heurístico actual
Fuente: Matlab - Simulink El tiempo de estabilización es de 51 segundos, mientras que con la estrategia actual, se tienen tiempo de estabilización de 123.6 segundos, por lo tanto utilizando el control PID en la válvula de control de presión, acompañado del huerístico propuesto, se mejora el tiempo del arranque en 72.6 segundos. Esta mejora confirma que la disputa de controles analizada anteriormente, es la que agrega más tiempo a la estabilización del arranque por el método actual. En éste caso al definir una secuencia establecida para la válvula de recirculación, liberándola del control on/off, se evita la generación de disputas de control, dejando a la válvula de control de presión como responsables principal del control del arranque.
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
Tiempo (s)
PS
I
COMPORTAMIENTO DE LA PRESION DE DESCARGA EN REGIMEN DE ARRANQUE DE LA BOMBA
X: 36.5Y: 2176
X: 51.17Y: 2000

78
7. COSTOS DE IMPLEMENTACIÓN Y EVALUCIÓN ECONÓMICA
7.1. CUANTIFICACIÓN DE BENEFICIONES ECONÓMICOS Para realizar un análisis económico de la inversión para de la implementación de la estrategia de control propuesta, es necesario determinar en térmicos económicos las mejoras a nivel de operación del sistema principal de inyección, que se lograrían con la implementación de la estrategia alternativa Teniendo en cuenta las limitaciones en la información suministrada por el sistema supervisorio de la planta, lo que imposibilita desarrollar un análisis completo de eficiencia del sistema completo de bombas, es posible definir dos elementos principales en los cuales mejoraría la operación de las bombas: El primero de ellos es el beneficio por la disminución del tiempo de arranque del sistema en relación al tiempo actual de estabilización, y el segundo es la posible disminución del número de caídas de bombas en el sistema, por sobrepresiones en el sistema.
7.1.1. Beneficios por disminución en tiempos de arranque Como se menciona en el capítulo anterior, el tiempo de arranque mejora con la estrategia de control seleccionada y con el heurístico propuesto, ya que reduce en cerca de 76 segundos el tiempo de estabilización. Esto quiere decir que por cada arranque en promedio se pierden 76 segundos de potencia efectiva del sistema de bombeo en operación. Si bien el flujo es inyectado la cabezal de recolección, el conflicto de los controladores causa una apertura permanente en la válvula de recirculación, que se traduce en menor presión flujo y presión inyectados durante ese intervalo de tiempo. Para tratar de cuantificar estos beneficios, podemos tomar la potencia nominal en la que opera la bomba a 2100 psi (presión en la cual se mantiene durante la estabilización con el arranque actual), relacionando el consumo de energía del motor durante el tiempo de estabilización. Esta energía se considera desperdiciada, por que el flujo inyectado a la línea de recolección no cumple con las condiciones requeridas, para aportar presión y caudal a la inyección a pozos. Observando la curva de la bomba, es posible determinar que la presión nominal a 2100 psi es 1300 Hp. Si tomamos los 76 segundos de disminución podemos obtener la potencia consumida por unidad de tiempo (Kw-h) por cada arranque de una bomba.

79
13000,7457
1 761
360020.46
Las bombas del sistema de inyección operando 26 días a la semana, y son encendidas al menos 6 en un día. Si cuantificamos la potencia consumida en tiempos de arranque durante un año de operación tenemos un aproximado, y tomamos una referencia del Kw-h en Barracabermeja (421.22$/Kw-h):
20.46 6í
288 í421.22$
$14.892.182
7.1.2. Beneficios por disminución en caídas de bombas
Como el sistema es variante y con perturbaciones permanentes y continuas, ya sea por altas o bajas de presión, el controlador realmente está trabajando la gran mayoría del tiempo en que la bomba se encuentre en operación. Esto lo podemos comprobar observando la siguiente gráfica, tomada mediante las tendencias entregadas por el sistema supervisorio de la planta. En la gráfica se puede observar el comportamiento de la válvula PCV de control de presión durante un intervalo de tiempo entre las 7:00 pm y las 7:00 am aproximadamente. Los datos se presentan con intervalos de 20 minutos. Figura 6.1: Comportamiento Válvula PCV – 12 horas de operación
Fuente: Elaboración de autores Los picos de la gráfica obedecen a caídas de la bomba por perturbaciones del sistema. Dichas caídas son frecuentes en el sistema actual, especialmente cuando se generan perturbaciones por arranques de las demás bombas que componen el sistema de inyección general.
0 50 100 150 200 25020
25
30
35
40
45
50
55
60COMPORTAMIENTO DE LA VÁLVULA PCV - 12 HORAS DE OPERACIÓN
Tiempo ( x 20 min)
%C
V

80
Es difícil determinar sin históricos el número de caídas de una bomba durante un intervalo de tiempo. El sistema supervisorio de la planta no genera reportes de caídas de bombas en el sistema, por lo tanto para cuantificar a nivel económico los beneficios por ahorros en caídas de bombas en el sistema de inyección, se toman varios escenarios de caídas de bomba, asumiendo que una caída de bomba supone un nuevo arranque de la misma. El costo de un arranque puede determinarse a partir de la potencia consumida durante de tiempo de estabilización del sistema. Pero para facilitar el análisis se tomará el tiempo total de estabilización con el método de arranque actual (123.6s), y el por el valor de la potencia nominal a 2100 psi, presión en la que permanece la mayoría del tiempo en la estabilización.
13000,7457
1 123.61
3600 33.28
Entonces teniendo en cuenta el valor obtenido anteriormente, y tomando nuevamente como referencia el valor del Kw-h, es posible obtener una tabla de ahorros para diferentes escenarios de caídas de bombas en un día de operación. Tabla 6.1: Tabla de costos de caídas de bombas
Fuente: Elaboración de autores
7.1.3. Beneficios no económicos no cuantificables Por la limitación de la información del sistema, y por carencias a nivel de instrumentos en campo para verificar condiciones de operación, no es posible realizar un análisis más completo de los beneficios económicos que traería una posible implementación.
Caidas por díaPotencia Consumida
Kwh Ahorro/día Ahorro/año
1 33.28 14,018$ 4,037,242$ 2 66.56 28,036$ 8,074,484$ 3 99.84 42,055$ 12,111,726$ 4 133.12 56,073$ 16,148,968$ 5 166.4 70,091$ 20,186,210$ 6 199.68 84,109$ 24,223,452$ 7 232.96 98,127$ 28,260,694$ 8 266.24 112,146$ 32,297,936$ 9 299.52 126,164$ 36,335,179$ 10 332.8 140,182$ 40,372,421$
81
Pero para efectos de complementar este análisis de viabilidad vale la pena mencionar algunos de ellos.
• Las condiciones de eficiencia de las bombas del sistema en general deberían ser mejores con la estrategia propuesta, ya que es posible mantener mejor los valores de presión y flujo adecuados, en los cuales se obtienen los mejores valores de eficiencia mecánica.
• Las caídas de las bombas en las plantas de inyección generan problemas de producción en pozos, ya que por caídas de presión es necesario sacar de funcionamientos líneas de inyección directas. Estos beneficios tienen un nivel alto de complejidad en su cuantificación, debido a la falta de información necesaria para el cálculo de las perdidas por paradas de producción de pozos.
7.2. COSTOS EN IMPLEMENTACIÓN DE ESTRATEGIA Para el cálculo de los cotos en la implementación, tomamos como referencia las tarifas aplicadas por la empresa de servicios petroleros que opera la planta PIA6. Teniendo en cuenta los procesos para realizar ajustes a parámetros de control en la planta, es posible determinar que hay 4 grandes rubros dentro del proceso de implementación, cada una con sus respectivos costos.
• Servicio de programación en oficinas: En éste rubro se concibe la recolección de los datos informáticos de los PLC y sistemas de supervisión con el objetivo de ser analizados y plantear las estrategias de programación de los controladores a modificar.
• Ingeniería de control en campo: Este ítem involucra nuevamente realizar
una verificación de la escalización de los módulos E/S involucrados en el lazo de control a intervenir, así como la puesta en servicio de la implementación y estabilización del sistema
• Servicios de Instrumentación en campo: Durante la puesta en servicio
de la implementación sobre el proceso es necesario verificar los lazos de control interviniendo la instrumentación asociada a la bomba y los elementos finales de control deben ser sometidos a una verificación de la calibración ajustada.
• Elaboración de documentación final: El documento final es el compendio donde se anexan los certificados de calibración, certificados de prueba de lazo, entregables informáticos de los PLC´s y SCADA´s asi como también las conclusiones, hallazgos y posibles mejoras del Sistema de Control.
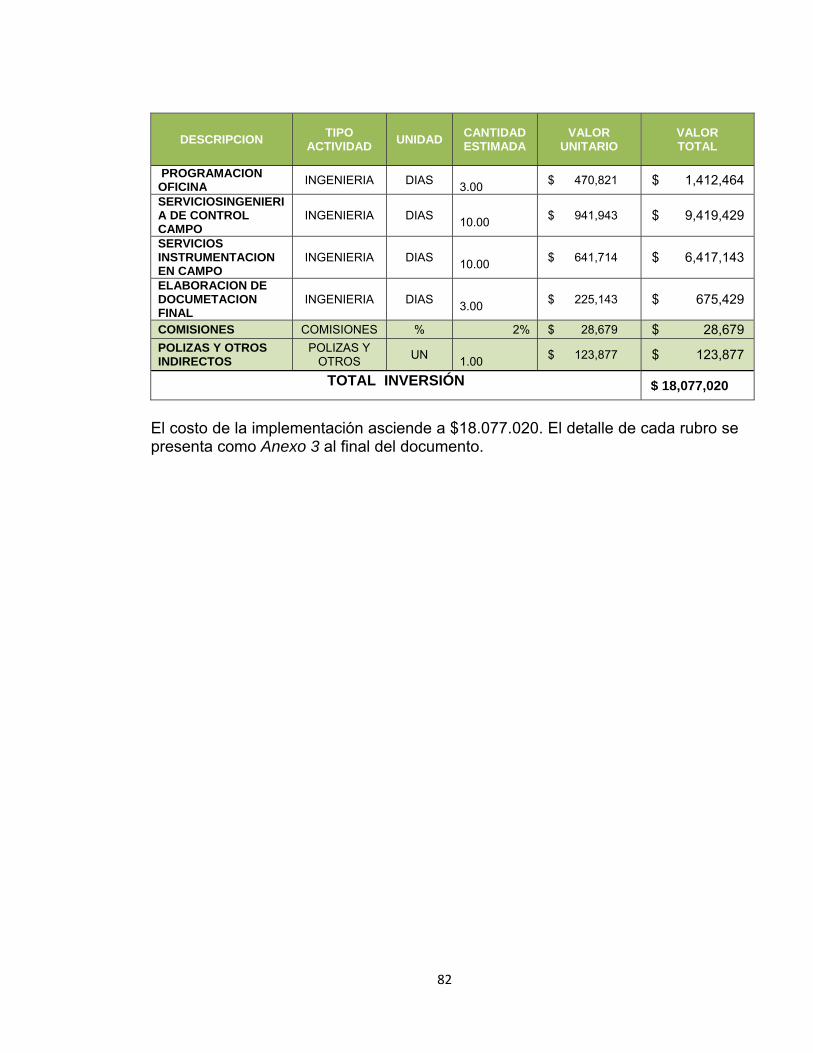
82
DESCRIPCION TIPO ACTIVIDAD UNIDAD CANTIDAD
ESTIMADA VALOR
UNITARIO VALOR TOTAL
PROGRAMACION OFICINA INGENIERIA DIAS
3.00 $ 470,821 $ 1,412,464 SERVICIOSINGENIERIA DE CONTROL CAMPO
INGENIERIA DIAS 10.00 $ 941,943 $ 9,419,429
SERVICIOS INSTRUMENTACION EN CAMPO
INGENIERIA DIAS 10.00 $ 641,714 $ 6,417,143
ELABORACION DE DOCUMETACION FINAL
INGENIERIA DIAS 3.00 $ 225,143 $ 675,429
COMISIONES COMISIONES % 2% $ 28,679 $ 28,679 POLIZAS Y OTROS INDIRECTOS
POLIZAS Y OTROS UN
1.00 $ 123,877 $ 123,877
TOTAL INVERSIÓN
$ 18,077,020
El costo de la implementación asciende a $18.077.020. El detalle de cada rubro se presenta como Anexo 3 al final del documento.

83
8. CONCLUSIONES Un control interactuante entre los lazos de control del sistema de inyección permite obtener mejores condiciones de control ante perturbaciones continuas ya que no limita la labor de control de uno de los lazos a situaciones puntuales de sobrepresión.
La selección de controladores tipo PID, para éste sistema en particular, facilita su posible implementación en campo debido a que la plataforma de automatización actualmente instalada, sólo cuenta con herramientas de control regulatorio con bloques para control PID. En recientes versiones ya se encuentran herramientas para control moderno y avanzado, por lo que se deja abierta la posibilidad de aplicar otras técnicas de control en futuras investigaciones El manejo adecuado de las variables del sistema en régimen de arranque, mejora con el control propuesto y con el heurístico de operación diseñado, ya que no genera conflictos de control entre los lazos existentes. Las dificultades en la obtención de información histórica sobre condiciones puntuales del proceso, como paradas, arranques, eficiencia de bombas, etc. no permiten realizar mayores análisis en la evaluación económica de la implementación. Sin embargo, el costo asociado a la implementación de las estrategias propuestas, es bajo en relación a las mejoras generadas en el control de las variables del proceso, teniendo en cuenta además, que es posible implementarlas con la infraestructura actualmente instalada en campo.

84
BIBLIOGRAFÍA
[1] Katsuhiko Ogata, Modern Control Engineering – Prentice-Hall, Inc – 1997- ISBN: 0132273071.
[2] Carlos A. Smith - Armando B. Corripio, Control Automático de procesos
Teoría y práctica - John Wiley & sons ltd – 1991 – ISBN: 9681837916 [3] Asís Tewari, Modern Control Desing with Matlab and Simulink – John Wiley
& sons ltd – 2002 – ISBN 0 471 496790.

85
ANEXOS DETALLE DE COSTOS DE IMPLEMENTACIÓN
Servicio de programación en oficinas
1. EQUIPOS REQUERIDOS PARA LA ACTIVIDAD :
DESCRIPCION CANT No.
DIAS TARIFA DIA V. UNITARIO EQUIPOS DE COMPUTO 2.00 1.00 15000.00 $ 30,000 SUBTOTAL $ 30,000 2. TRANSPORTES
DESCRIPCION CANT TARIFA V. UNITARIO TRASNPORTES MATERIALES $ - TRANSPORTE PERSONAS REUNIONES 1.00 10000.00 $ 10,000.00 SUBTOTAL $ 10,000 3. MANO DE OBRA:
PERFIL
CANTIDAD PERSONAS REQ
PARA LA ACTIVIDAD
% OCUPACION
COST. LAB/DIA V. UNITARIO
INGENIERO DE PROYECTOS OFICINA 2.00 100% $ 152,619 $ 305,238 GERENTE TECNICO OFICINA 1.00 55% $ 228,333 $ 125,583 SUBTOTAL $ 430,821 TOTAL COSTO DIRECTO $ 470,821
DESCRIPCION % VALOR TOTAL ADMINISTRACION 0% $ - IMPREVISTOS 0% $ - UTILIDAD 0% $ -
SUBTOTAL $ - PRECIO UNITARIO TOTAL $ 470,821

86
Ingeniería de control en campo
1. EQUIPOS REQUERIDOS PARA LA ACTIVIDAD : DESCRIPCION CANT No. DIAS TARIFA DIA V. UNITARIO EQUIPO DE COMPUTO 1 1 15000.00 $ 15,000 SUBTOTAL $ 15,000 2. MATERIALES:
DESCRIPCION UNID. P. UNIT. CANT. V. UNITARIO
HIDRATACION UNID. $
15,000 1.00 $ 15,000.00
ALOJAMIENTO UNID. $
100,000 1.00 $ 100,000.00
LOGISTICA BOGOTA UNID. $
301,000 1.00 $ 301,000.00 SUBTOTAL $ 416,000 3. TRANSPORTES
DESCRIPCION CANTIDAD TARIFA V. UNITARIO CAMIONETA CAMPO OXY 1.00 $ 100,000.00 $ 100,000.00 MOVILIZACION BOGOTA CAMPO 1.00 $ 60,000.00 $ 60,000.00 SUBTOTAL $ 160,000 4. MANO DE OBRA:
PERFIL
CANTIDAD PERSONAS REQ PARA
LA ACTIVIDAD
% OCUP. COST. LAB/DIA V. UNITARIO
INGENIERO DE CONTROL CAMPO 1.00 100% $ 228,952 $ 228,952
SUBTOTAL $ 228,952 TOTAL COSTO DIRECTO $ 819,952 5. COSTOS INDIRECTOS:
DESCRIPCION PORC. VALOR TOTAL ADMINISTRACION 8% $ 65,596 IMPREVISTOS 4% $ 32,798 UTILIDAD 8% $ 65,596
SUBTOTAL $ 163,990 PRECIO UNITARIO TOTAL $ 983,943

87
Servicios de instrumentación en campo
1. EQUIPOS REQUERIDOS PARA LA ACTIVIDAD : DESCRIPCION MARCA CANT No. DIAS TARIFA DIA V. UNITARIO
ALQUILER EQUIPOS DE INSTRUMENTACION VARIAS 1.00 1 $ 90,000
$ 90,000
SUBTOTAL $ 90,000 2. MATERIALES:
DESCRIPCION UNID. P. UNIT. CANT. V. UNITARIO
HIDRATACION UNID. $ 15,000 1.00 $
15,000.00
ALOJAMIENTO UNID. $ 100,000 1.00 $
100,000.00 SUBTOTAL $ 115,000 3. TRANSPORTES
DESCRIPCION CANTIDAD TARIFA V. UNITARIO CAMIONETA CAMPO CORCEL 1.00 $ 100,000
$ 100,000.00
MOVILIZACION BOGOTA CAMPO 1.00 $ 15,000
$ 15,000.00
SUBTOTAL $ 115,000 4. MANO DE OBRA:
PERFIL
CANTIDAD PERSONAS REQ PARA
LA ACTIVIDAD
PORCENTAJE DE OCUP COST. LAB/DIA V. UNITARIO
INSTRUMENTISTA 1.00 100% $ 214,762 $ 214,762 SUBTOTAL $ 214,762 TOTAL COSTO DIRECTO $ 534,762
DESCRIPCION PORC. VALOR TOTAL ADMINISTRACION 8% $ 42,781 IMPREVISTOS 4% $ 21,390 UTILIDAD 8% $ 42,781
SUBTOTAL $ 106,952 PRECIO UNITARIO TOTAL $ 641,714

88
Elaboración de documentación final
1. EQUIPOS REQUERIDOS PARA LA ACTIVIDAD :
DESCRIPCION MARCA CANTIDAD No. DIAS TARIFA DIA V. UNITARIO
COMPUTADOR PORTATIL DELL 1.00 1 15000.00 $ 15,000 SUBTOTAL $ 15,000 2. MATERIALES:
DESCRIPCION UNID. P. UNIT. CANT. V. UNITARIO PAPELERIA E IMPRESIONES UNID. $ 20,000 1.00 $ 20,000 SUBTOTAL $ 20,000 4. MANO DE OBRA:
PERFIL
CANTIDAD PERSONAS
REQ PARA LA ACTIVIDAD % OCUP. COST. LAB/DIA V. UNITARIO
INGENIERO DE PROYECTOS OFICINA 1.00 100% $ 152,619 $ 152,619 SUBTOTAL $ 152,619 TOTAL COSTO DIRECTO $ 187,619
DESCRIPCION % OCUP. VALOR TOTAL ADMINISTRACION 8% $ 15,010 IMPREVISTOS 4% $ 7,505 UTILIDAD 8% $ 15,010
SUBTOTAL $ 37,524 PRECIO UNITARIO TOTAL $ 225,143