vibracion es
TRANSCRIPT

VIBRACIÓN LIBRE SIN
AMORTIGUACIÓN
(UN GRADO DE LIBERTAD)
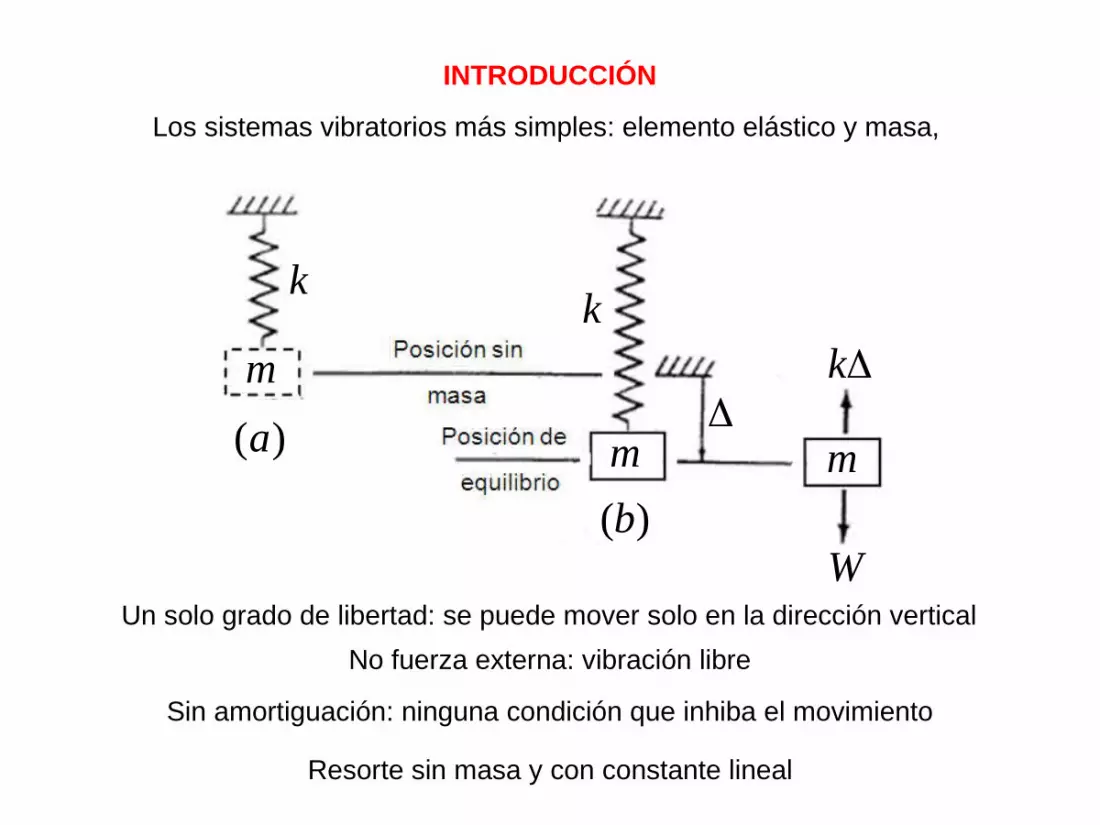
INTRODUCCIÓN
Los sistemas vibratorios más simples: elemento elástico y masa,
Un solo grado de libertad: se puede mover solo en la dirección vertical
No fuerza externa: vibración libre
Sin amortiguación: ninguna condición que inhiba el movimiento
Resorte sin masa y con constante lineal
k
W
kk
mm
m
)(a
)(b
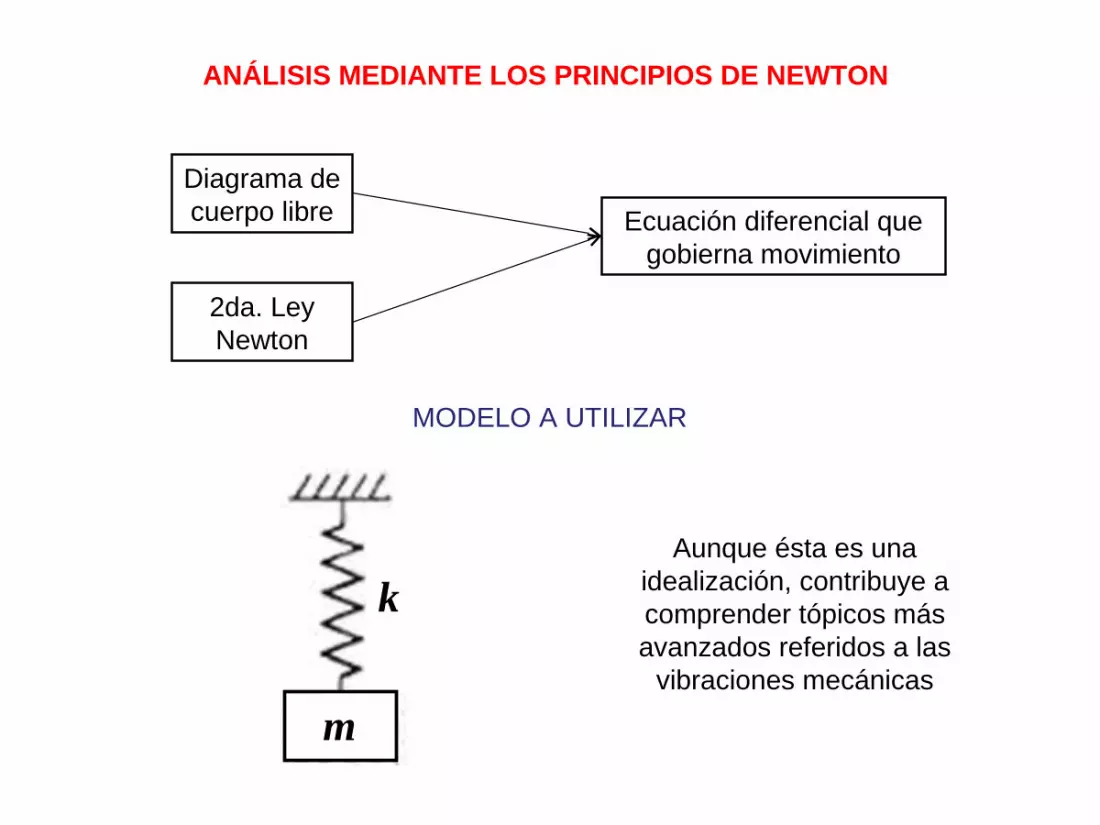
ANÁLISIS MEDIANTE LOS PRINCIPIOS DE NEWTON
Diagrama de cuerpo libre
2da. Ley Newton
Ecuación diferencial que gobierna movimiento
Aunque ésta es una idealización, contribuye a comprender tópicos más avanzados referidos a las
vibraciones mecánicas
MODELO A UTILIZAR
m
k
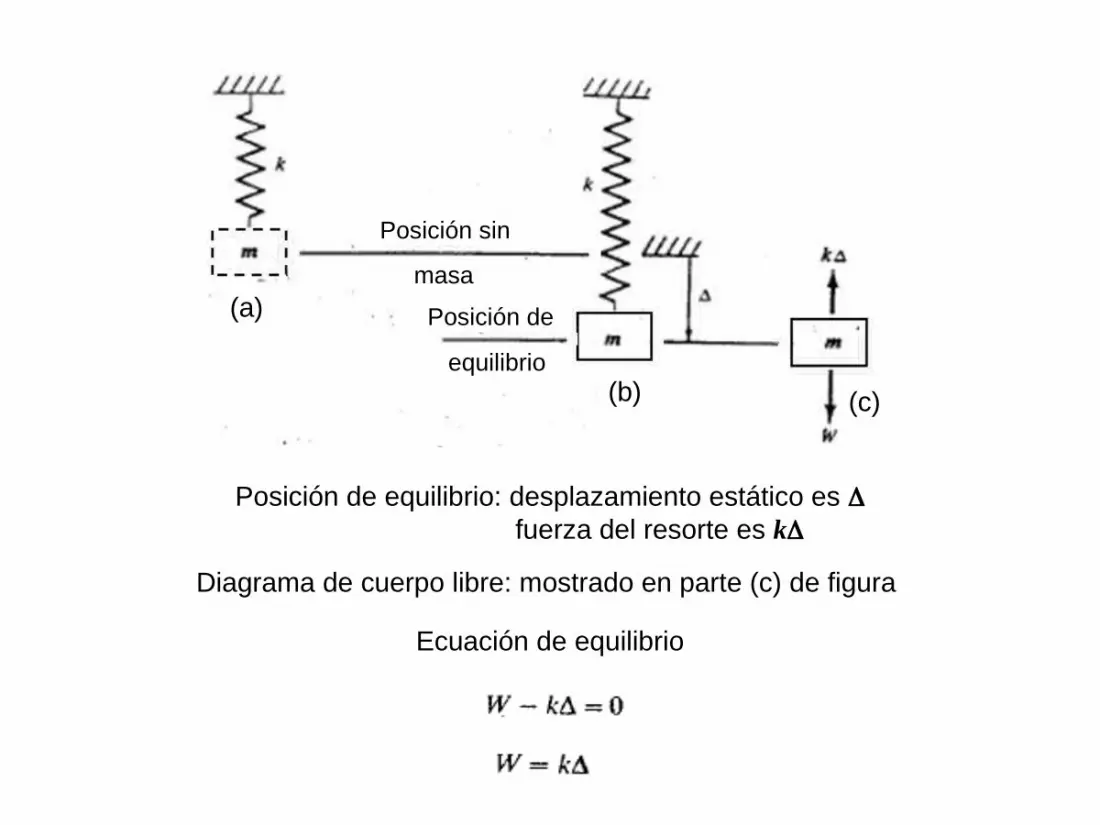
Posición de equilibrio: desplazamiento estático es fuerza del resorte es k
Diagrama de cuerpo libre: mostrado en parte (c) de figura
Ecuación de equilibrio
Posición sin
equilibrio
Posición de
masa(a)
(b) (c)
Posición
dinámica
Posición de equilibrio
Diagrama de cuerpolibre completo
Diagrama de cuerpolibre dinámico
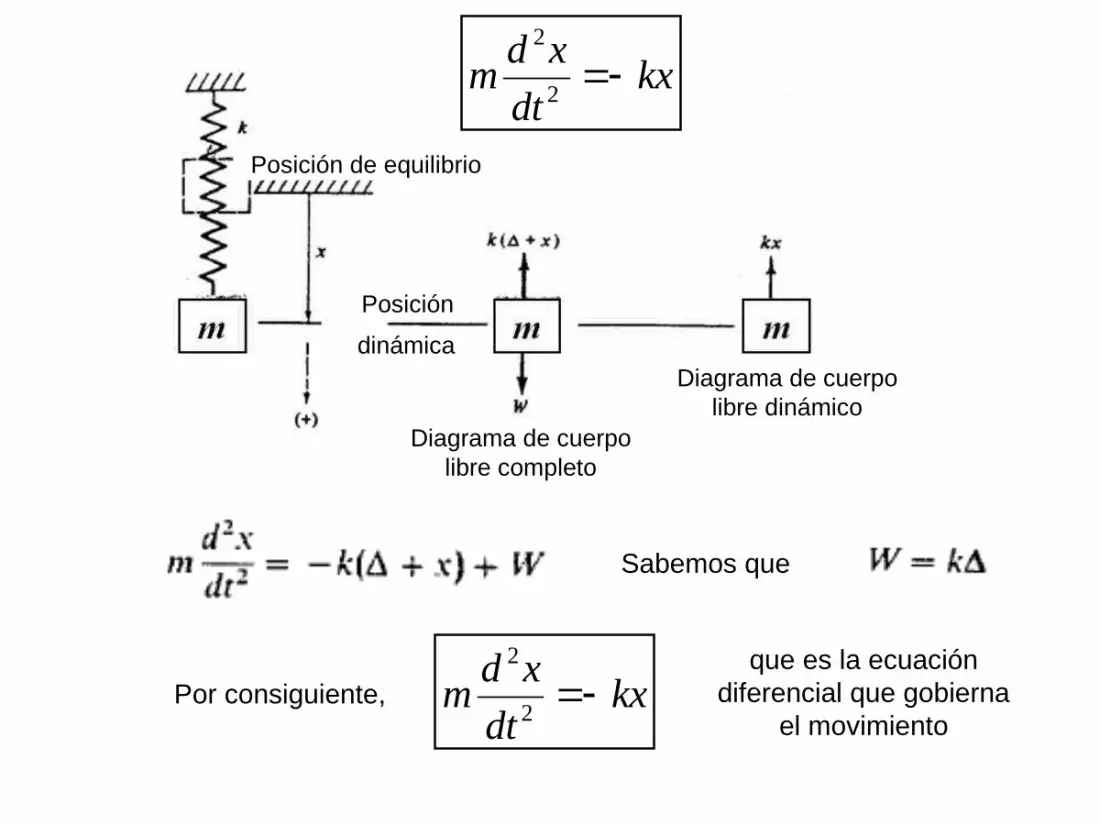
Sabemos que
Por consiguiente, kxdt
xdm 2
2 que es la ecuación diferencial que gobierna
el movimiento
kxdt
xdm 2
2
ECUACIÓN DIFERENCIAL
Donde
dtdxx
2
2
dtxdx
kxdt
xdm 2
2
02
2
xmk
dtxd
022
2
xdt
xd 02 xx
mk
2mk

SOLUCIÓN DE LA ECUACIÓN DIFERENCIAL
Ésta es una ecuación diferencial lineal y homogénea con coeficientes constantes
Ya que ésta es una ecuación de segundo orden, la solución debe tener dos constantes arbitrarias
Para satisfacer la ecuación, la solución debe retornar a la misma forma en su segunda derivada
sen t y cos t satisface la condición anterior
Parece entonces razonable que la suma de las funciones anteriores, con las constantes apropiadas representaría la solución general, así
donde A y B son las constantes requeridas. Se determinan mediante las condiciones iniciales del movimiento
La sustitución de esta solución en la ecuación revela que la satisface.
02 xx
tBtAsenx cos
SOLUCIÓN DE LA ECUACIÓN DIFERENCIAL
Ecuación diferencial lineal de segundo orden
)()()(2
yrxygdtdxyf
dtxd
Ecuación diferencial lineal, homogénea de segundo orden
0)()(2
xygdtdxyf
dtxd
Teorema fundamental (Ecuación lineal homogénea)
Si se multiplica por una constante una solución, la función resultante también es una solución
Si se suman dos soluciones, la suma resultante también es una solución
Las funciones f(y), g(y) son los coeficientes de la ecuación
Kreyszig pag. 128
SOLUCIÓN DE LA ECUACIÓN DIFERENCIALcontinuación
En esta solución es posible reemplazar las constantes arbitrarias por un nuevo conjunto de variables. Por ejemplo:
Sustituyendo en la solución, se tiene
donde C y son las nuevas constantes arbitrarias
(2.7)
(2.8)
(2.9)
tBtAsenx cos
CsenB cosCA
)coscos( senttsenCx )( tCsenx

Se acuerdo a estas expresiones
y por consiguiente:
Adicionalmente,
El término se llama fase o ángulo de fase
SOLUCIÓN DE LA ECUACIÓN DIFERENCIALcontinuación
2222 )()cos( BACsenC
AB
CCsen
costan
cosCA
22 BAC
CsenB

SOLUCIÓN DE LA ECUACIÓN DIFERENCIALcontinuación
La expresión anterior (2.9):
También satisface la ecuación diferencial
Esta expresión resultó al utilizar las relaciones:
Si se usan las expresiones adecuadas, se pueden obtener soluciones del tipo siguiente:
Las cuales también satisfacen la ecuación diferencial
Para cada conjunto de condiciones iniciales, las cuatro soluciones son idénticas
----------------------------------------------------------------------------
)( tCsenx
CsenB cosCA
INTERPRETACIÓN DE LA SOLUCIÓN
Aplicando las condiciones iniciales
Sustituyendo en la expresión
Se obtiene
La solución se convierte en:
2.14
tBtAsenx cos
0xA
0xB
txtsenxx
cos00
Sustituyendo las expresiones
en las siguientes relaciones:
se obtiene:
20
20 )( xxC
0
0tanx
x
Sustituyendo ahora la expresión para C en la siguiente ecuación:
Dicha ecuación se transforma en:
2.15
INTERPRETACIÓN DE LA SOLUCIÓN
22 BAC AB
CCsen
costan
)( tCsenx
)( tXsenx
0xA
0xB
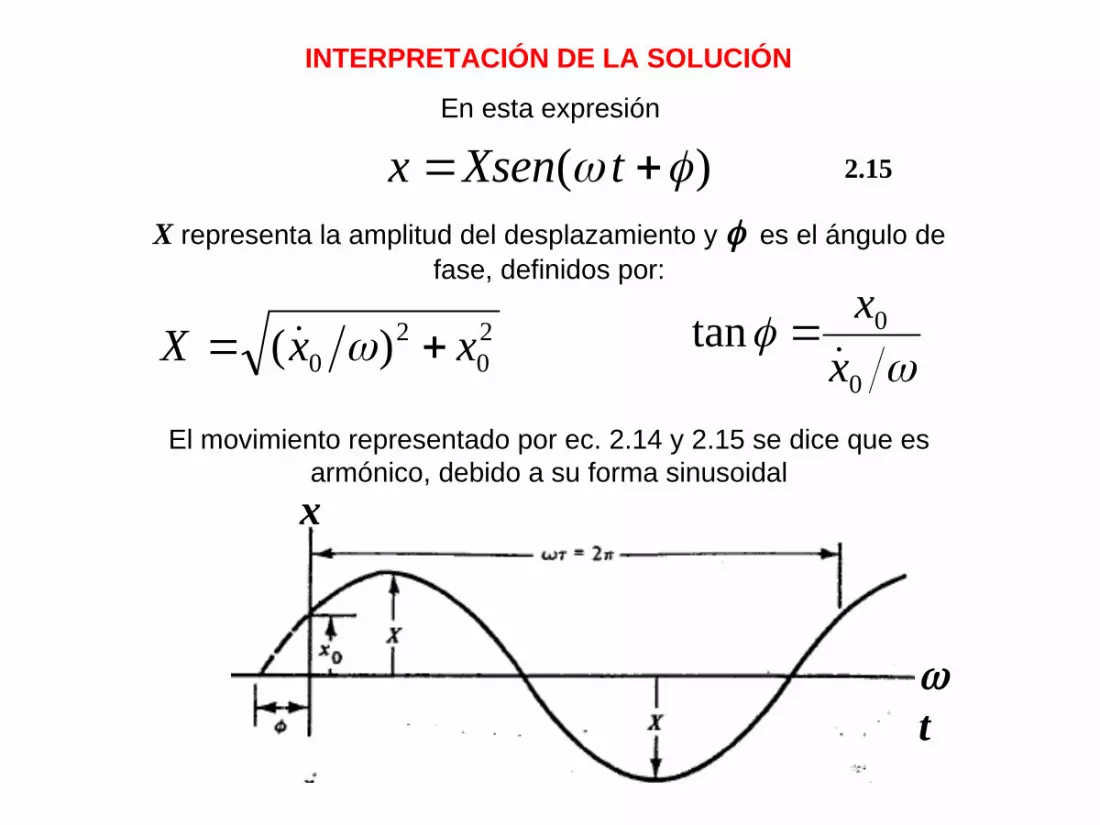
X representa la amplitud del desplazamiento y es el ángulo de fase, definidos por:
En esta expresión
2.15
El movimiento representado por ec. 2.14 y 2.15 se dice que es armónico, debido a su forma sinusoidalx
t
INTERPRETACIÓN DE LA SOLUCIÓN
)( tXsenx
20
20 )( xxX
0
0tanx
x

Este movimiento se repite cada ciclo, con el tiempo para un ciclo definido por el valor de t = 2
Así el período es
2 es la frecuencia circular
El recíproco de es la frecuencia f en ciclos por unidad tiempo. Así
[segundos]
2f
mk
[rad/s]
INTERPRETACIÓN DE LA SOLUCIÓN
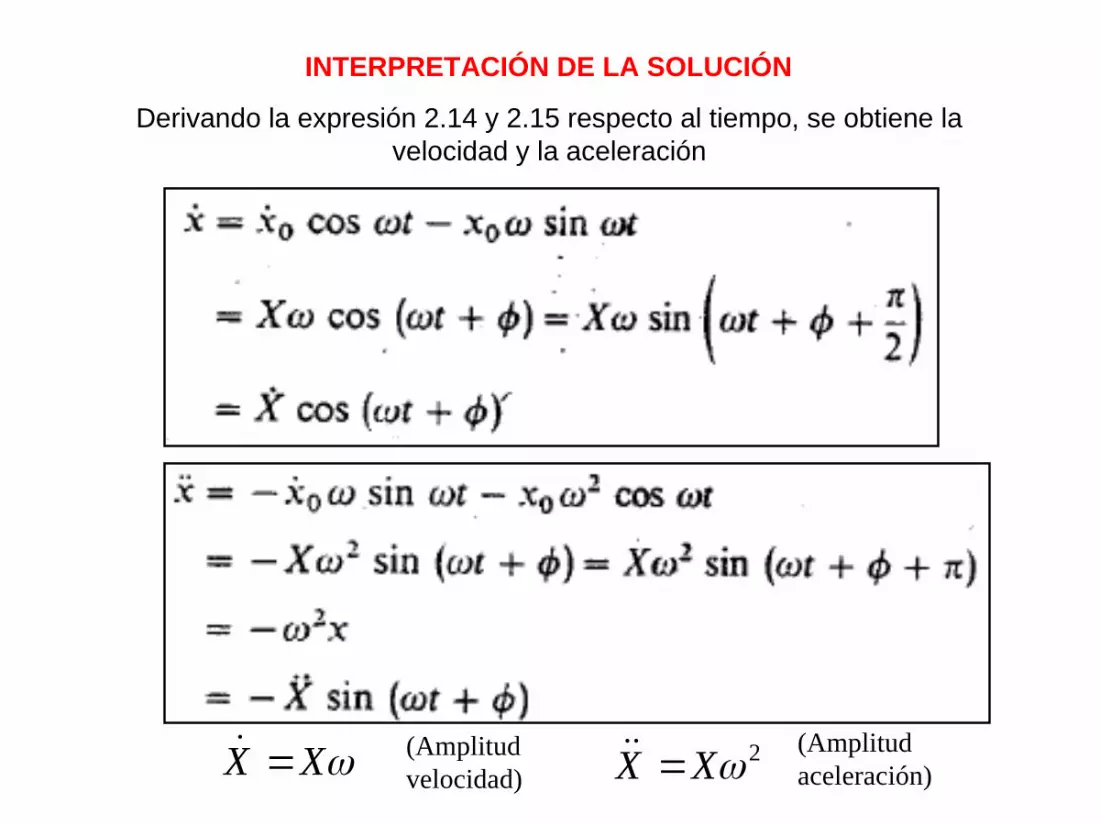
Derivando la expresión 2.14 y 2.15 respecto al tiempo, se obtiene la velocidad y la aceleración
XX 2XX (Amplitud velocidad)
(Amplitud aceleración)
INTERPRETACIÓN DE LA SOLUCIÓN
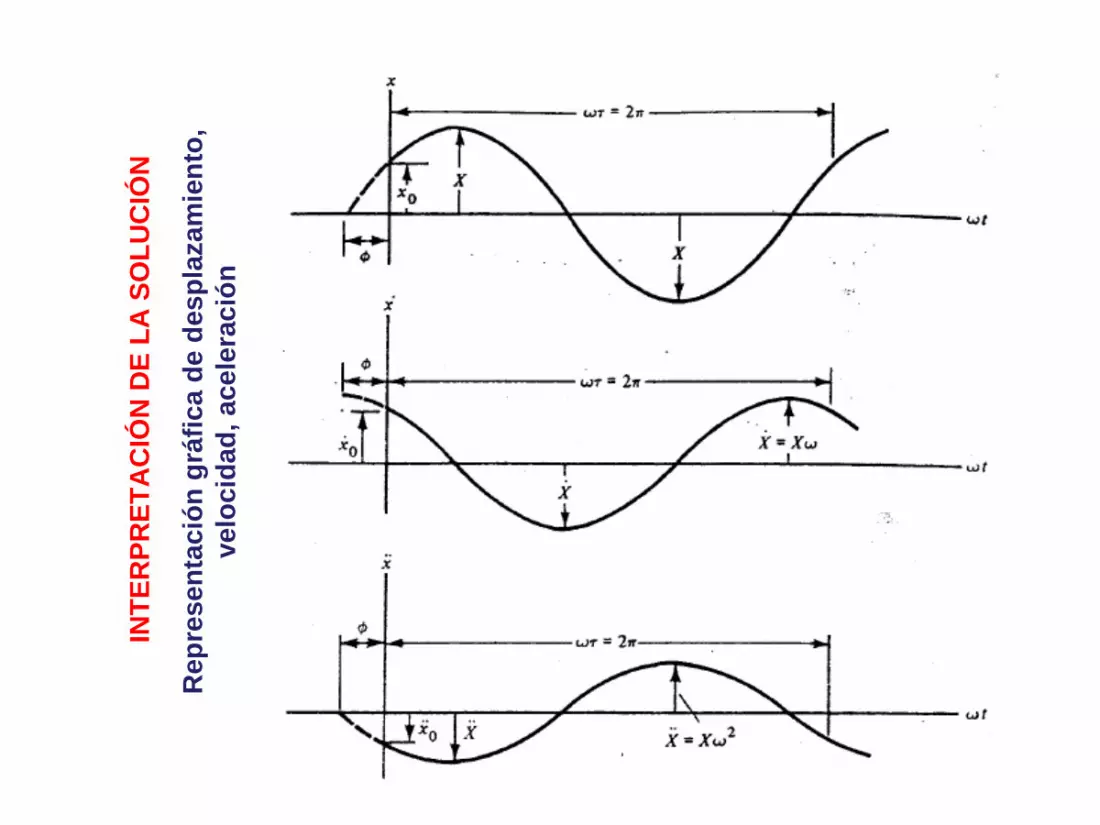
Rep
rese
ntac
ión
gráf
ica
de d
espl
azam
ient
o,ve
loci
dad,
ace
lera
ción
INTE
RPR
ETA
CIÓ
N D
E LA
SO
LUC
IÓN

VIBRACIÓN TORSIONAL
Ciertos componentes de estructuras y un gran número de máquinas presentan vibración torsional
A pesar de que los elementos de máquinas pueden ser complicados en cuanto a su forma y arreglo, generalmente
pueden ser reducidos a sistemas equivalentes compuestos de ejes y discos que tienen libertad torsional
El modelo descrito se muestra en la figura siguiente, compuesto de ejes elásticos y discos inerciales
Se supone que el eje no tiene masa
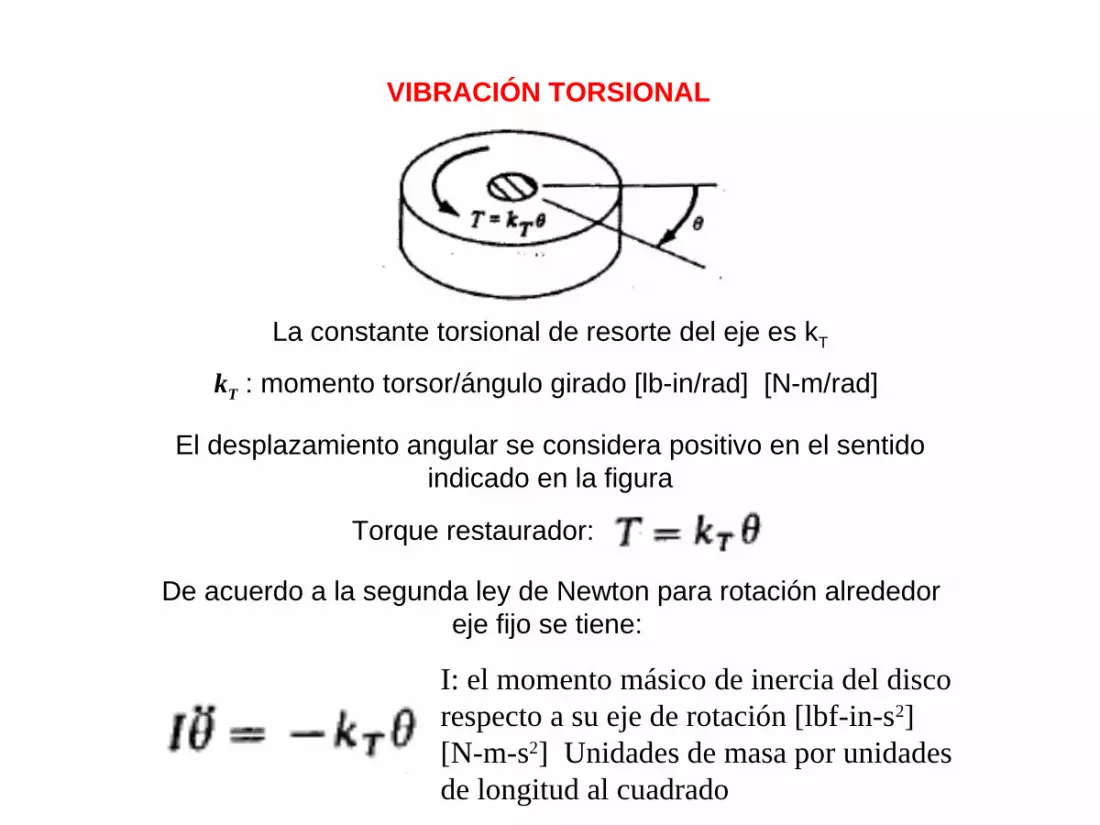
La constante torsional de resorte del eje es kT
kT : momento torsor/ángulo girado [lb-in/rad] [N-m/rad]
El desplazamiento angular se considera positivo en el sentido indicado en la figura
De acuerdo a la segunda ley de Newton para rotación alrededor eje fijo se tiene:
Torque restaurador:
I: el momento másico de inercia del disco respecto a su eje de rotación [lbf-in-s2] [N-m-s2] Unidades de masa por unidades de longitud al cuadrado
VIBRACIÓN TORSIONAL
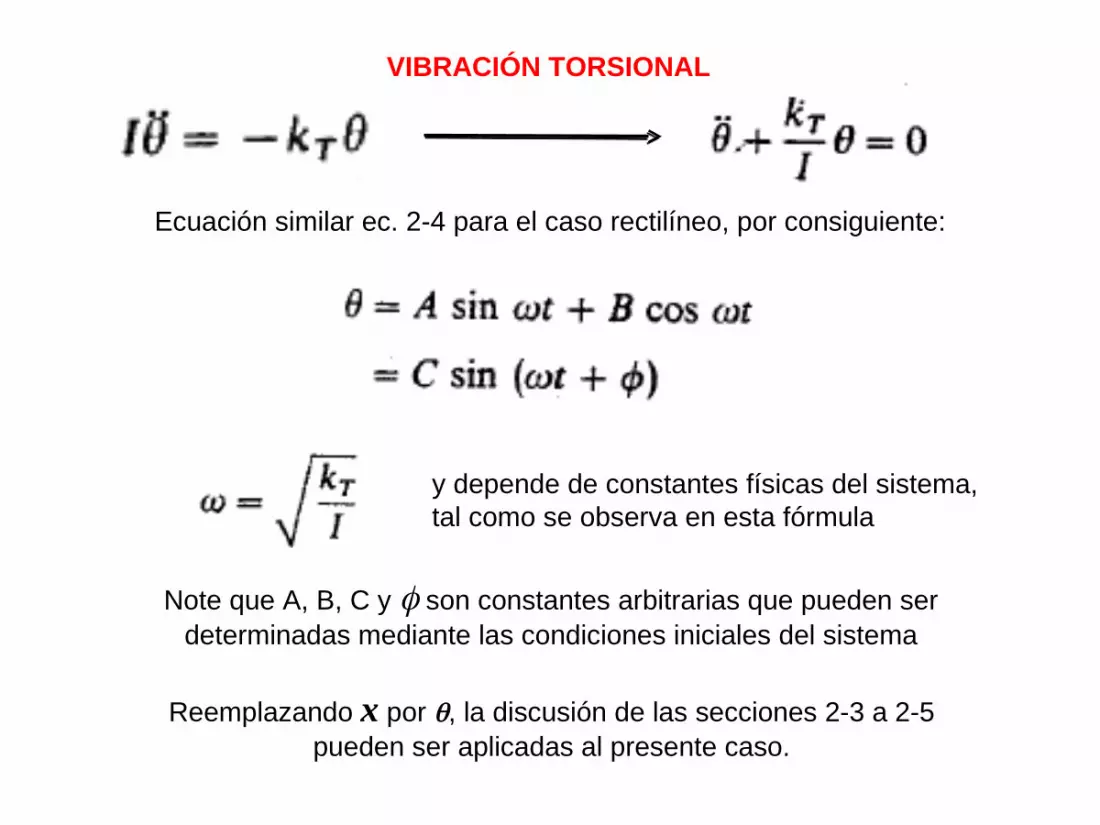
Ecuación similar ec. 2-4 para el caso rectilíneo, por consiguiente:
y depende de constantes físicas del sistema, tal como se observa en esta fórmula
Note que A, B, C y son constantes arbitrarias que pueden ser determinadas mediante las condiciones iniciales del sistema
Reemplazando x por , la discusión de las secciones 2-3 a 2-5 pueden ser aplicadas al presente caso.
VIBRACIÓN TORSIONAL
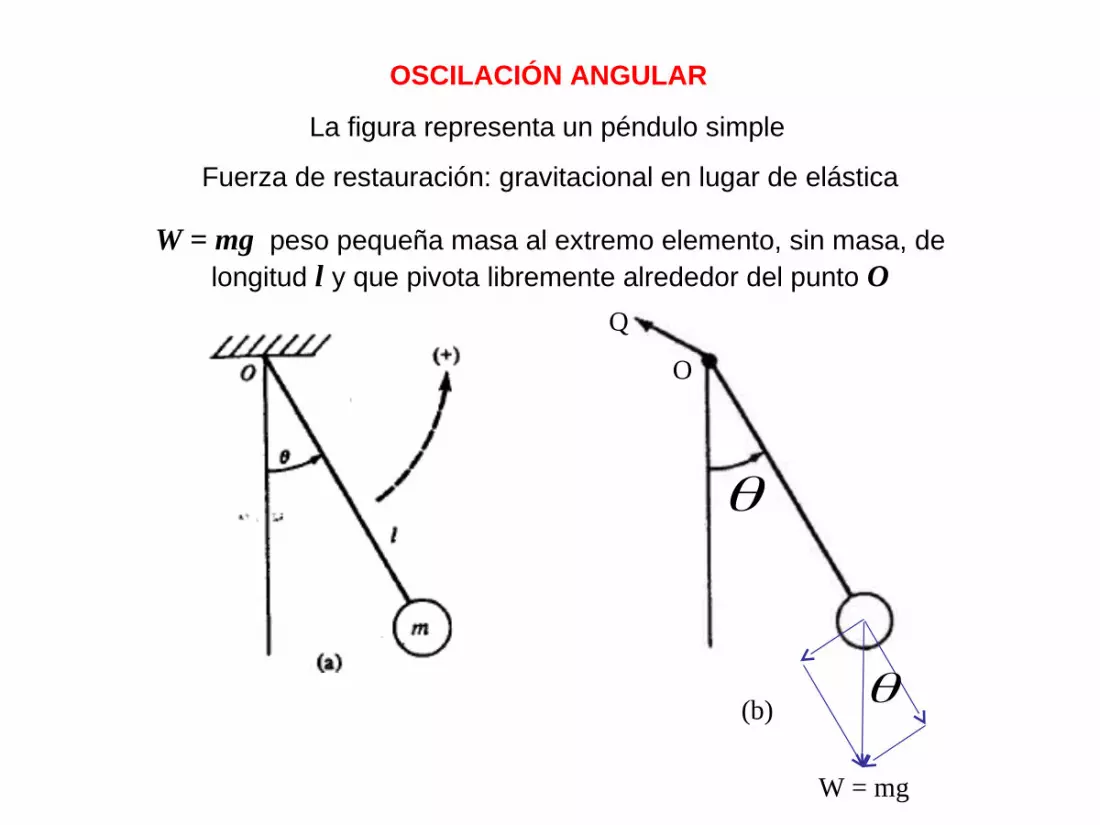
OSCILACIÓN ANGULAR
La figura representa un péndulo simple
Fuerza de restauración: gravitacional en lugar de elástica
W = mg peso pequeña masa al extremo elemento, sin masa, de longitud l y que pivota libremente alrededor del punto O
O
Q
W = mg
(b)
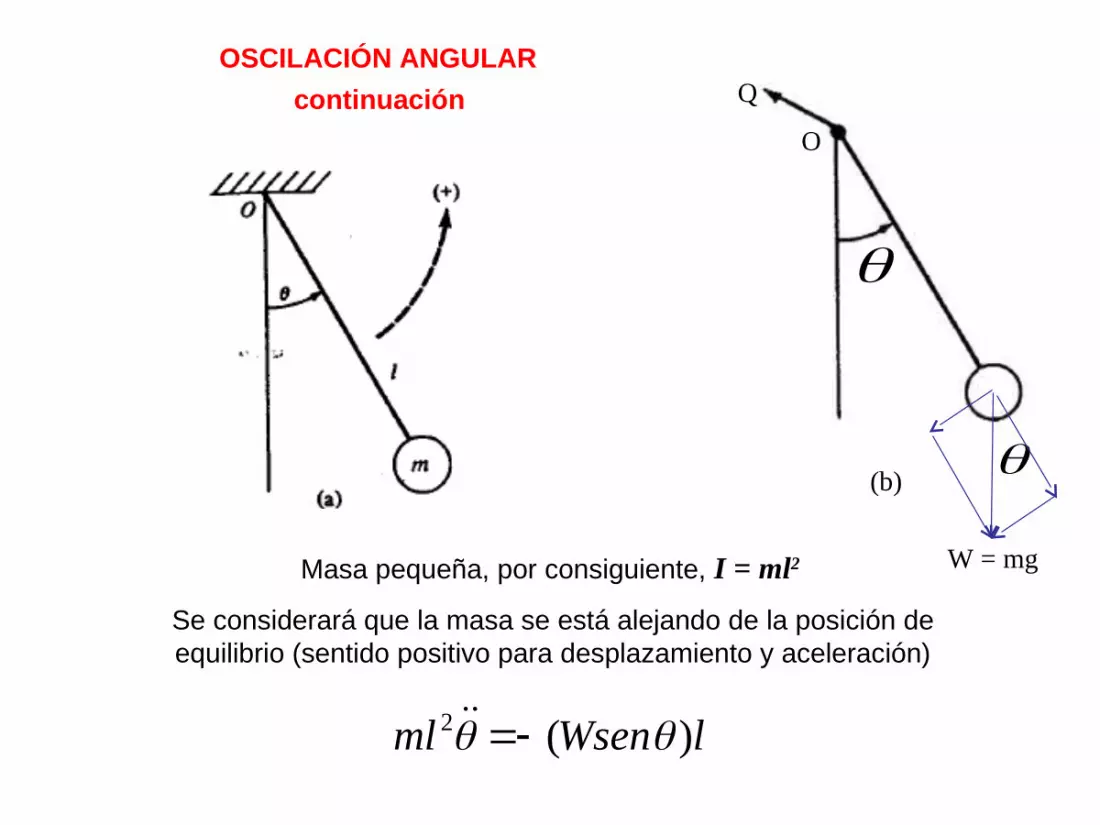
OSCILACIÓN ANGULARcontinuación
Masa pequeña, por consiguiente, I = ml2
Se considerará que la masa se está alejando de la posición de equilibrio (sentido positivo para desplazamiento y aceleración)
lWsenml )(2
O
Q
W = mg
(b)
OSCILACIÓN ANGULARcontinuación
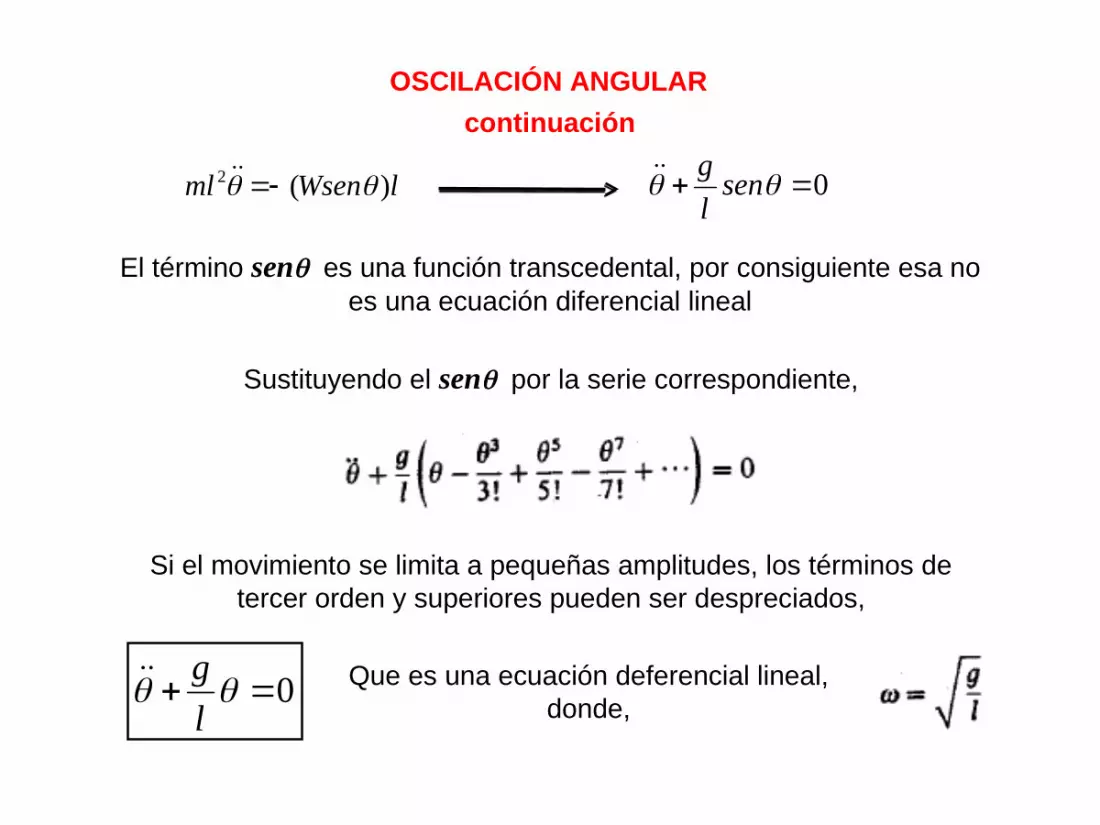
lWsenml )(2 0 senlg
El término sen es una función transcedental, por consiguiente esa no es una ecuación diferencial lineal
Sustituyendo el sen por la serie correspondiente,
Si el movimiento se limita a pequeñas amplitudes, los términos de tercer orden y superiores pueden ser despreciados,
0 lg Que es una ecuación deferencial lineal,
donde,
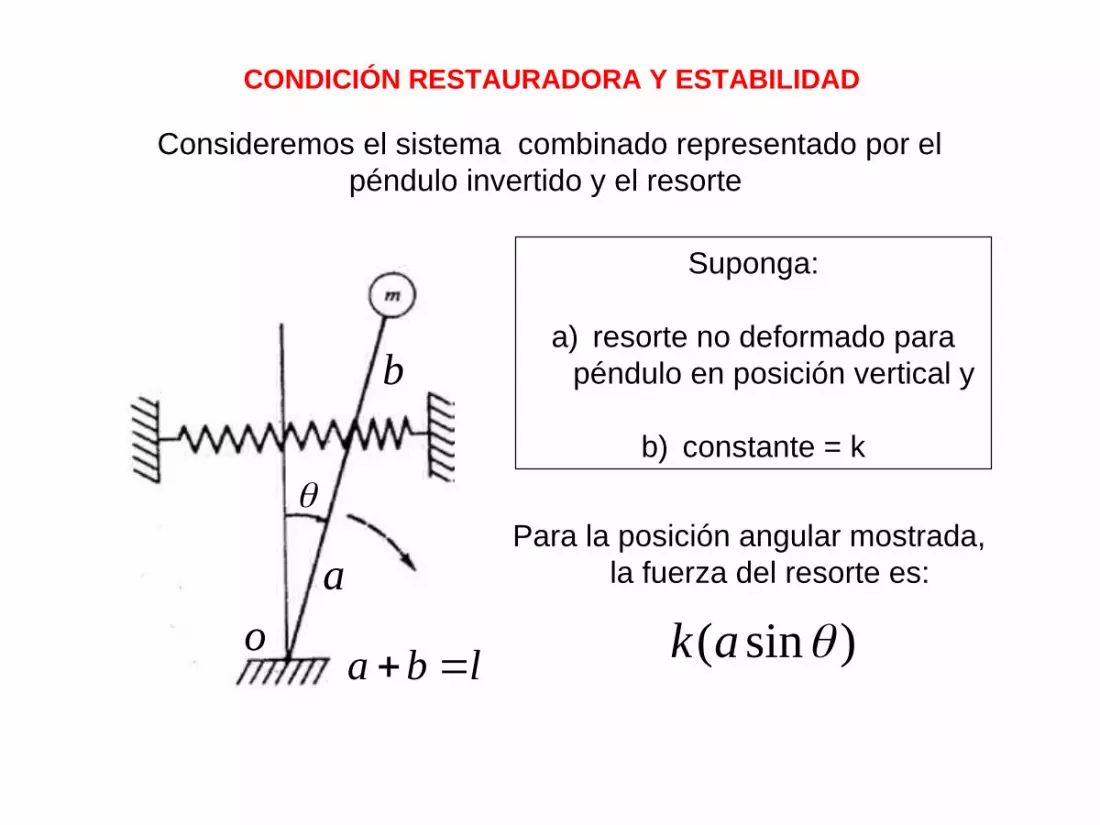
Consideremos el sistema combinado representado por el péndulo invertido y el resorte
CONDICIÓN RESTAURADORA Y ESTABILIDAD
Suponga:
a) resorte no deformado para péndulo en posición vertical y
b) constante = k
Para la posición angular mostrada, la fuerza del resorte es:
)sin( ak
a
b
lba o
CONDICIÓN RESTAURADORA Y ESTABILIDAD
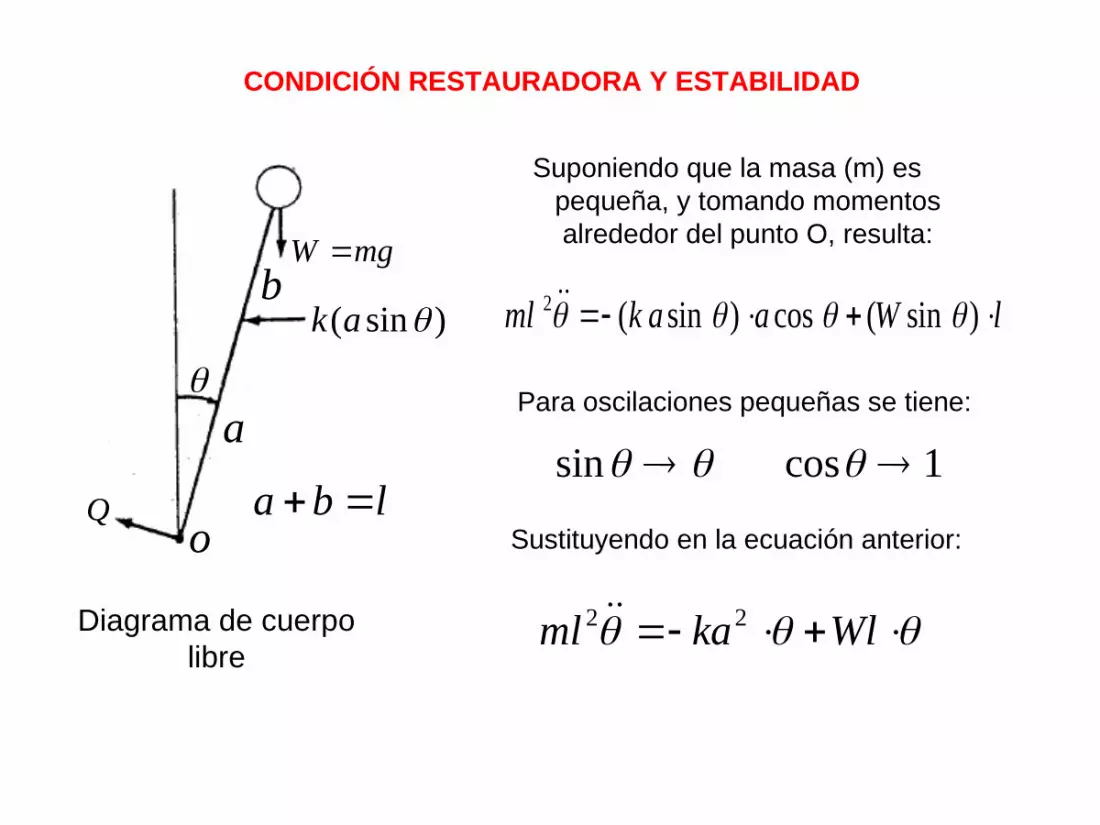
Diagrama de cuerpo libre
Suponiendo que la masa (m) es pequeña, y tomando momentos alrededor del punto O, resulta:
lWaakml )sin(cos)sin(2
Para oscilaciones pequeñas se tiene:
sin 1cos
Wlkaml 22
Sustituyendo en la ecuación anterior:
a
b
o
mgW
Q
)sin( ak
lba

CONDICIÓN RESTAURADORA Y ESTABILIDAD
Wlkaml 22
Que se puede arreglar para obtener:
02
2
mlWlka
)sin( tCWlka 2para
Donde 2
2
mlWlka
Esto representa el caso de una oscilación estable
Si la condición anterior no se cumple se tendrá equilibrio, velocidad constante o inestabilidad
CASO 1: Oscilación estable
Soluciónecuación diferencia

CONDICIÓN RESTAURADORA Y ESTABILIDAD
0Wlka 2
Esta última ecuación se puede resolver integrando dos veces respecto al tiempo y se obtiene:
21 CtC
Calculando las constantes arbitrarias y sustituyendo se tiene:
oo t
02
2
mlWlkapara
0oSi La masa se desplaza a velocidad constante
0o Equilibrio estático, el péndulo permanece en su posición inicial )( o
CASO 2: Velocidad constante o equilibrio
)( o

CONDICIÓN RESTAURADORA Y ESTABILIDAD
Wlka 2 02
2
mlWlkapara
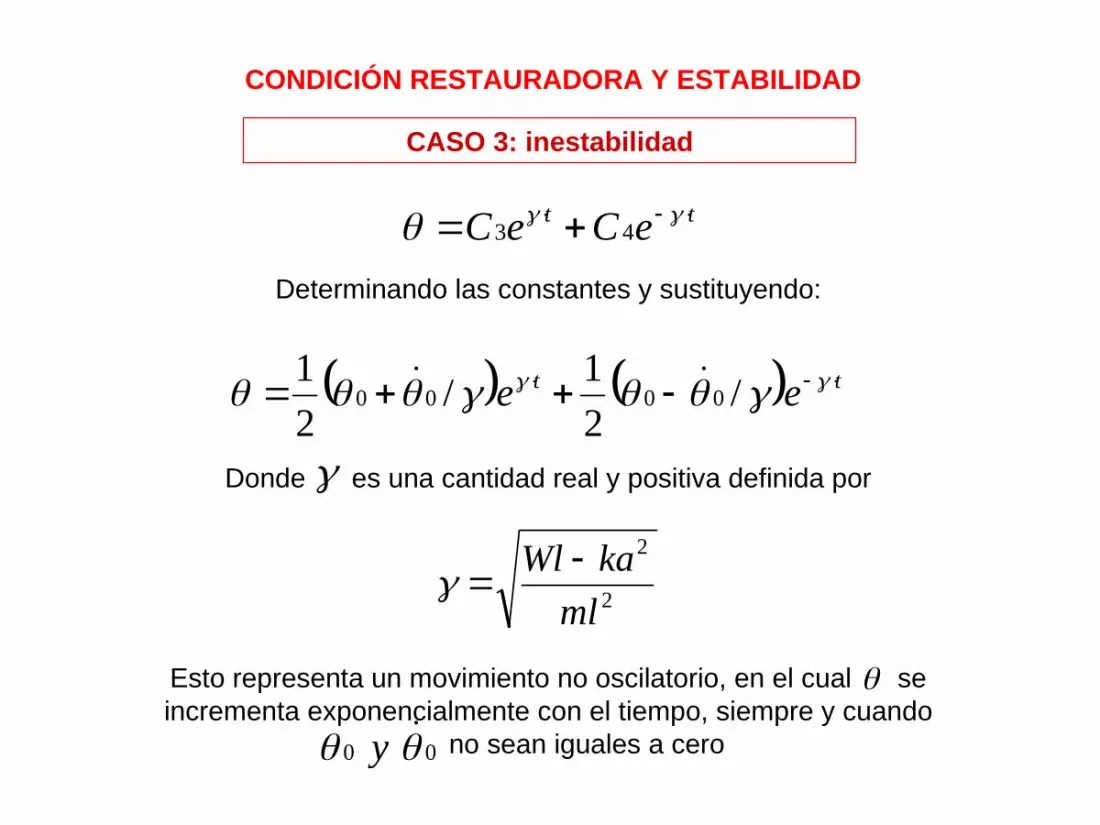
CASO 3: inestabilidad
02
tt eCeC 43
Haciendo: 22
2
mlWlka
es un número realdonde
Haciendo la siguiente suposición y sustituyendo en la ecuación anterior
stCe 0)( 22 stCes
En donde se requiere que: 022 s s
Por consiguiente la solución es
CONDICIÓN RESTAURADORA Y ESTABILIDAD
CASO 3: inestabilidad
tt eCeC 43
tt ee /21/
21
0000
Determinando las constantes y sustituyendo:
Donde es una cantidad real y positiva definida por
2
2
mlkaWl
Esto representa un movimiento no oscilatorio, en el cual se incrementa exponencialmente con el tiempo, siempre y cuando
no sean iguales a cero
00 y
CONDICIÓN RESTAURADORA Y ESTABILIDAD
CASO 3: inestabilidad
Este caso representa un arreglo inestable
El momento restaurador es menor que el momento no restaurador
Una condición restauradora tiende a retornar el sistema a la posición de equilibrio
Una condición no restauradora tiende a alejar al sistema de su posición de equilibrio
Una condición restauradora (fuerza o momento) se reconoce por su signo negativo en el lado derecho
de la ecuación diferencial.

RESORTES EQUIVALENTES
En el análisis de sistemas vibratorios conviene, con frecuencia, reemplazar los elementos elásticos por resortes equivalentes
Así, el problema se reduce a un simple modelo masa-resorte
El procedimiento para lograr esto pasa por definir la constante (k) de resorte del elemento analizado
(k) se define determinado la fuerza o el momento por unidad de desplazamiento del elemento en el punto donde se encuentra la masa
Se requiere entonces, arreglar la expresión para el desplazamiento o la deflexión de acuerdo al elemento considerado
PkTkT

RESORTES EQUIVALENTES
Ejemplo 1: Viga en voladizo
Deflexión en extremo libre de la viga
La constante de resorte equivalente será:
I es momento de inercia de la sección
E módulo de elasticidad del material de viga EIPl 3/3
3
3lEIPk
RESORTES EQUIVALENTES
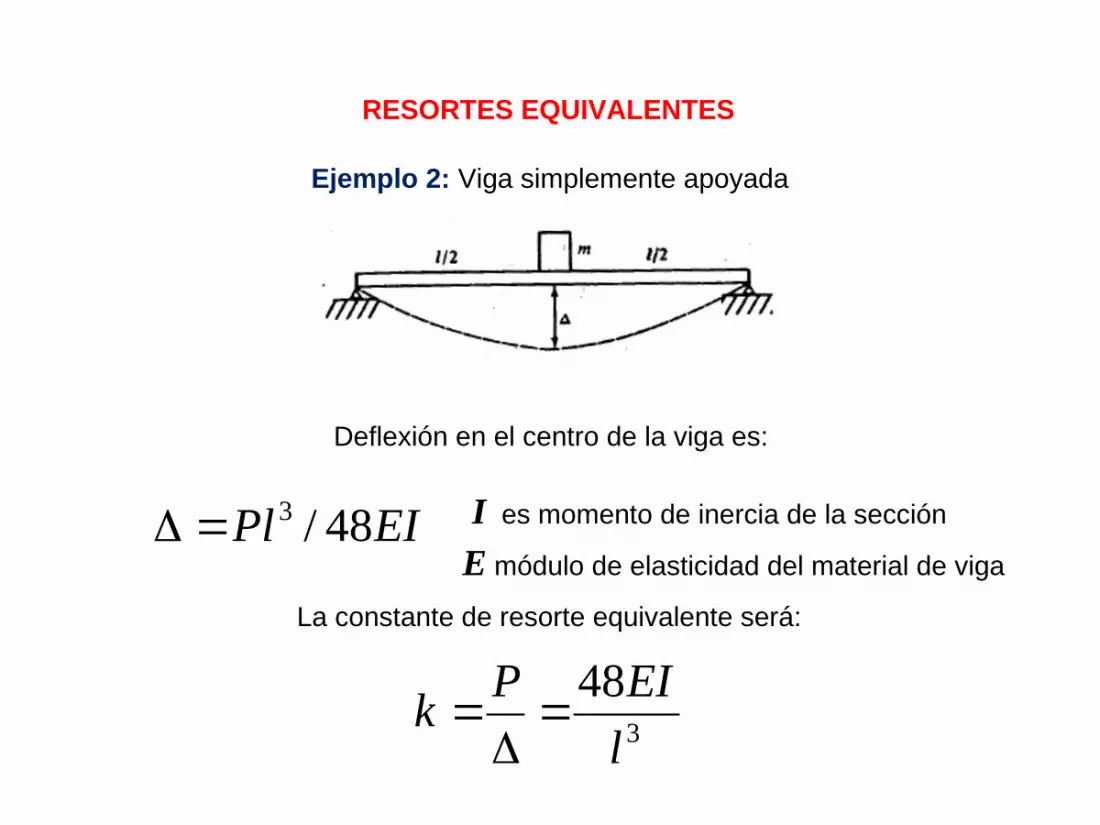
Ejemplo 2: Viga simplemente apoyada
Deflexión en el centro de la viga es:
La constante de resorte equivalente será:
I es momento de inercia de la sección
E módulo de elasticidad del material de viga EIPl 48/3
3
48lEIPk
RESORTES EQUIVALENTES
Expresión general para constante de resorte de una viga:
Donde es una constante
Que depende del tipo de apoyo de la viga y de sus condiciones de carga
3
1lEIPk
RESORTES EQUIVALENTES
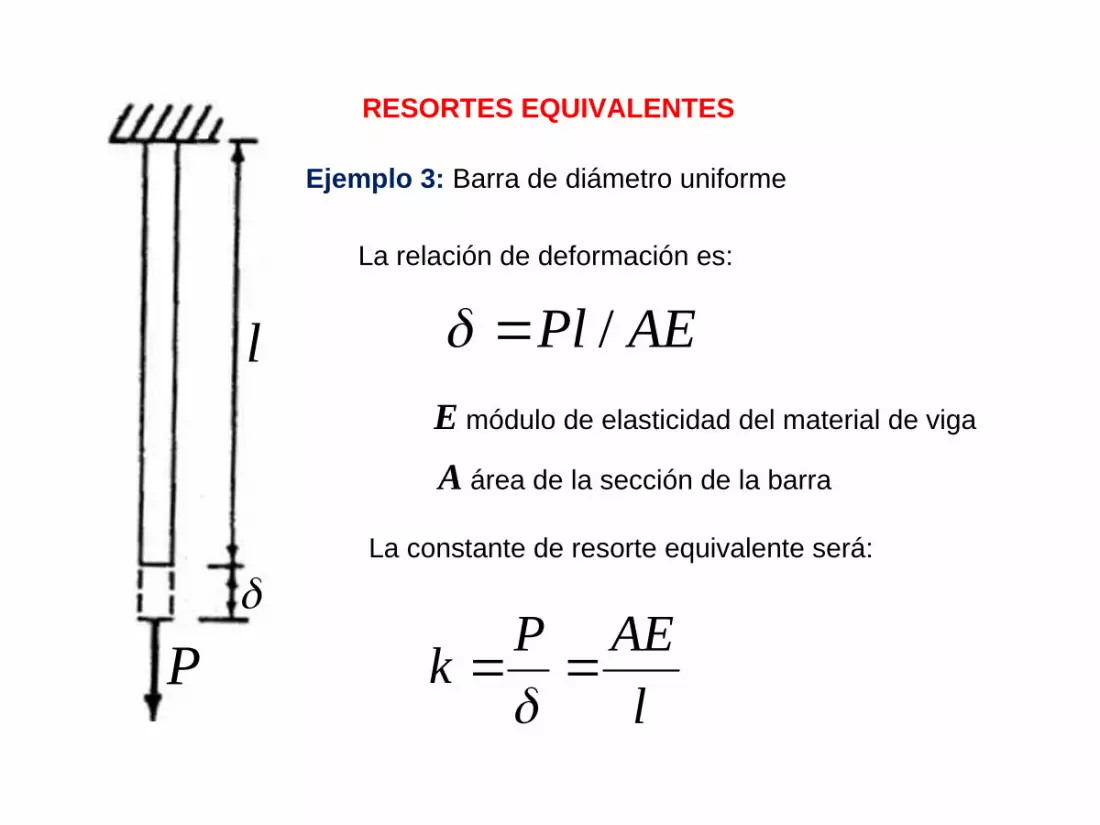
Ejemplo 3: Barra de diámetro uniforme
La relación de deformación es:
La constante de resorte equivalente será:
E módulo de elasticidad del material de viga
A área de la sección de la barra
AEPl /
lAEPk
l
P
RESORTES EQUIVALENTEScontinuación
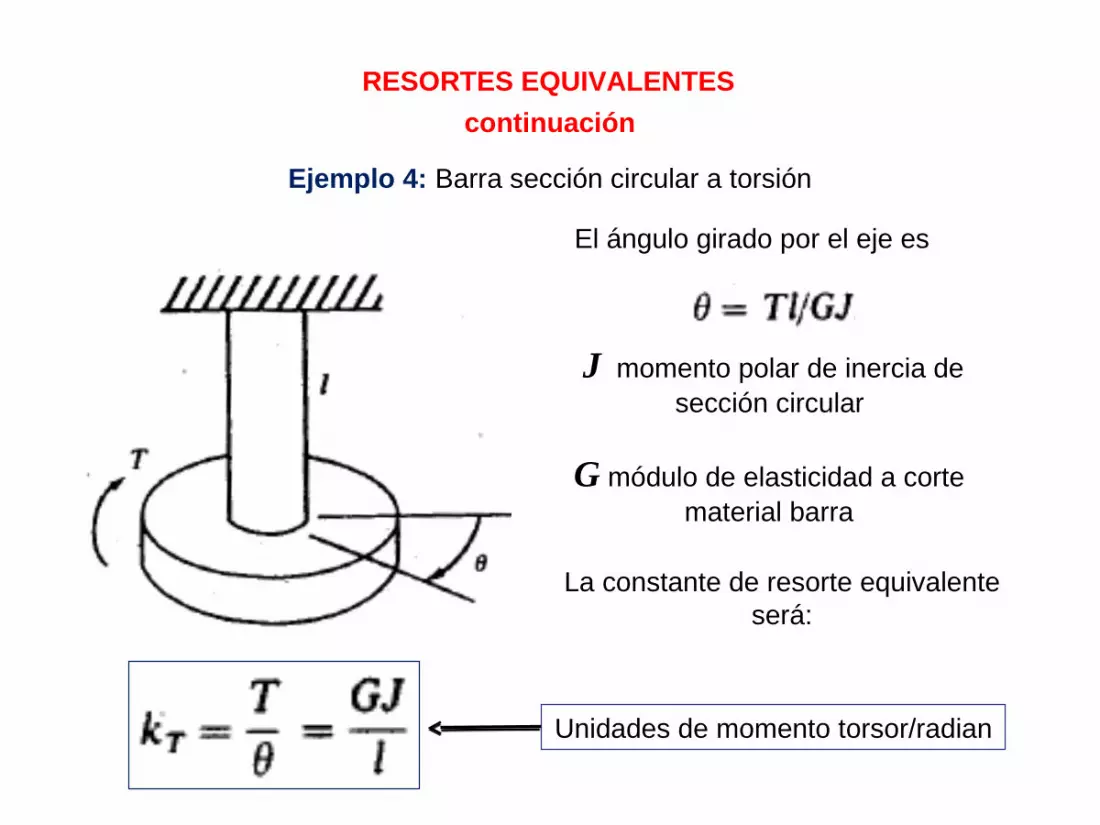
Ejemplo 4: Barra sección circular a torsión
El ángulo girado por el eje es
La constante de resorte equivalenteserá:
J momento polar de inercia de sección circular
G módulo de elasticidad a cortematerial barra
Unidades de momento torsor/radian
RESORTES EQUIVALENTEScontinuación
Combinación de varios resortes
En máquinas y estructuras se presentan frecuentemente combinaciones de varios resortes
Conviene sustituir tales combinaciones de resortes por un resorte equivalente único
Ese resorte equivalente único debe producir las mismas condiciones físicas y de movimiento que la combinación original de resortes
Se estudiará ahora el procedimiento para realizar la antes mencionada sustitución
RESORTES EQUIVALENTEScontinuación
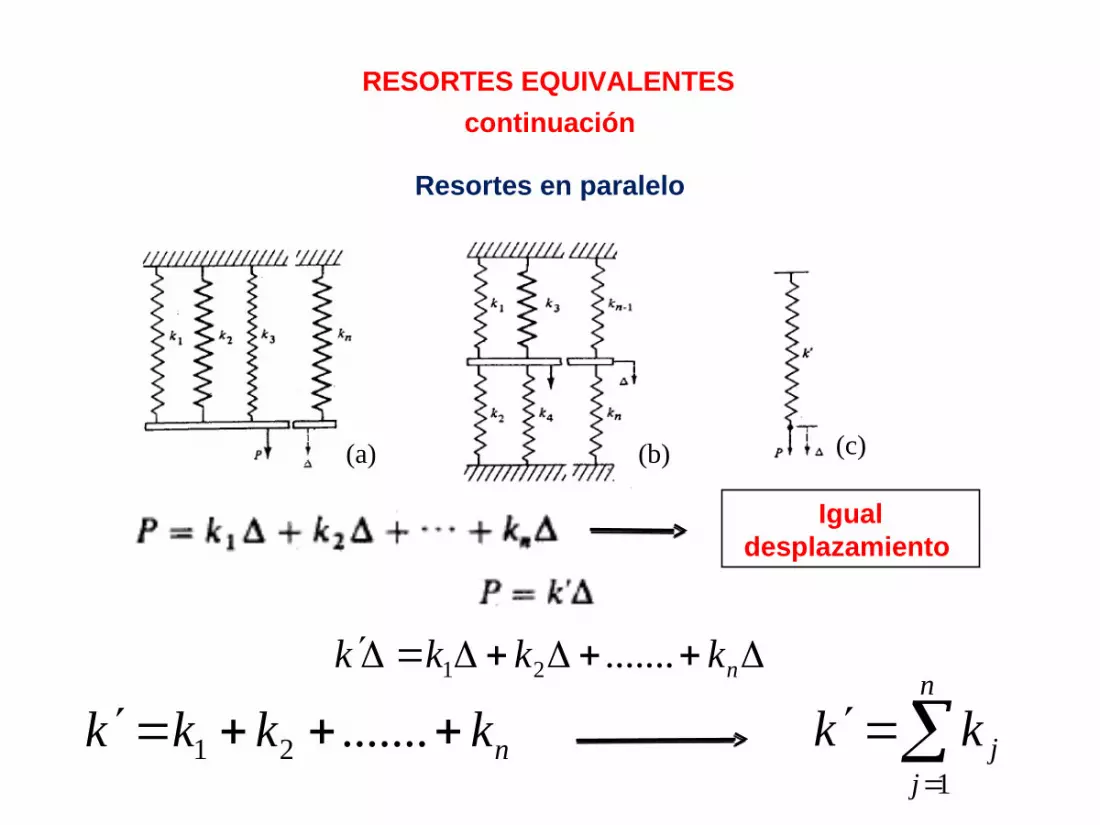
Resortes en paralelo
(a) (b) (c)
Igual desplazamiento
nkkkk .......21
nkkkk .......21
n
jjkk
1

RESORTES EQUIVALENTES
Resortes en serie
La misma fuerza en cada resorte

RESORTES EQUIVALENTES
Ejemplo
Determinar la constante de resorte equivalente para el sistema representado en la figura
(Resortes en paralelo)
(Resortes en serie)
(Resortes en paralelo)

MÉTODO DE LA ENERGÌA
Como no se extrae ni se agrega energía al sistema
T es la energía cinética
V es la energía potencial
En general, para pequeñas oscilaciones, T es una función de la velocidad y V es función del desplazamiento
La derivada respecto al tiempo, debe conducir a la ecuación diferencial que gobierna el movimiento del sistema
T + V = constante
0VTdtd
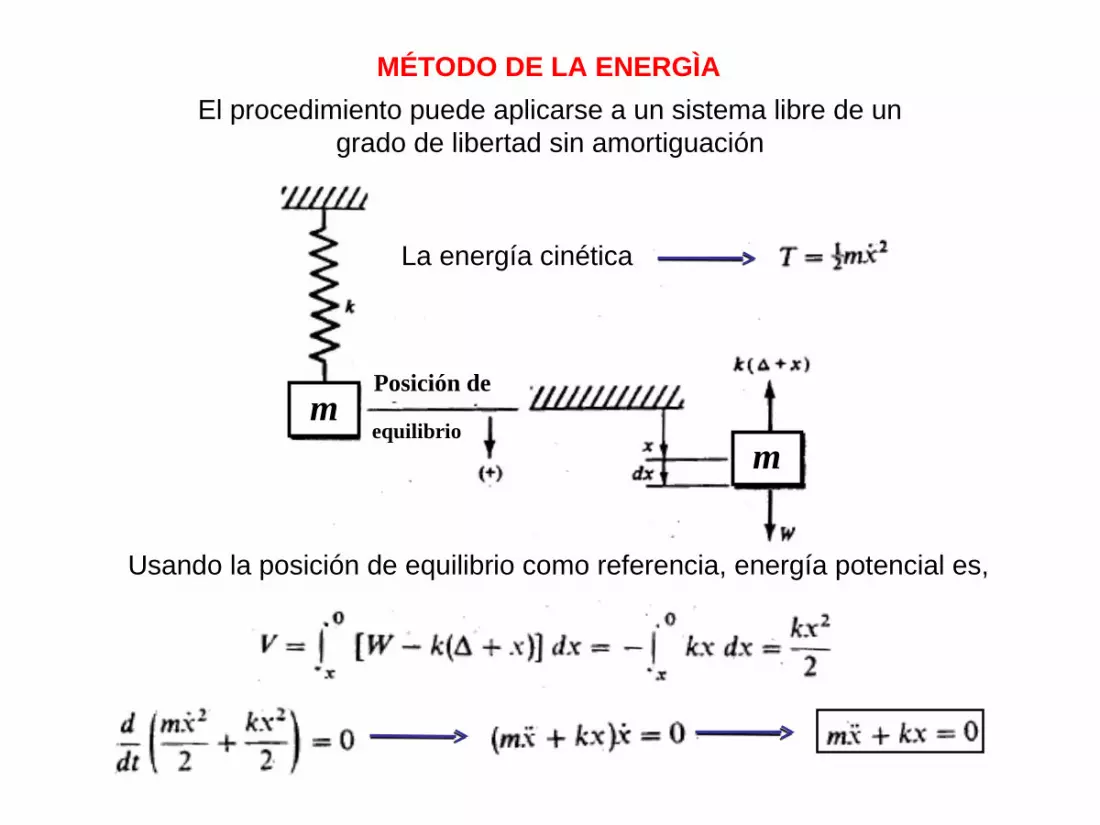
El procedimiento puede aplicarse a un sistema libre de un grado de libertad sin amortiguación
Usando la posición de equilibrio como referencia, energía potencial es,
mm
Posición de
equilibrio
La energía cinética
MÉTODO DE LA ENERGÌA
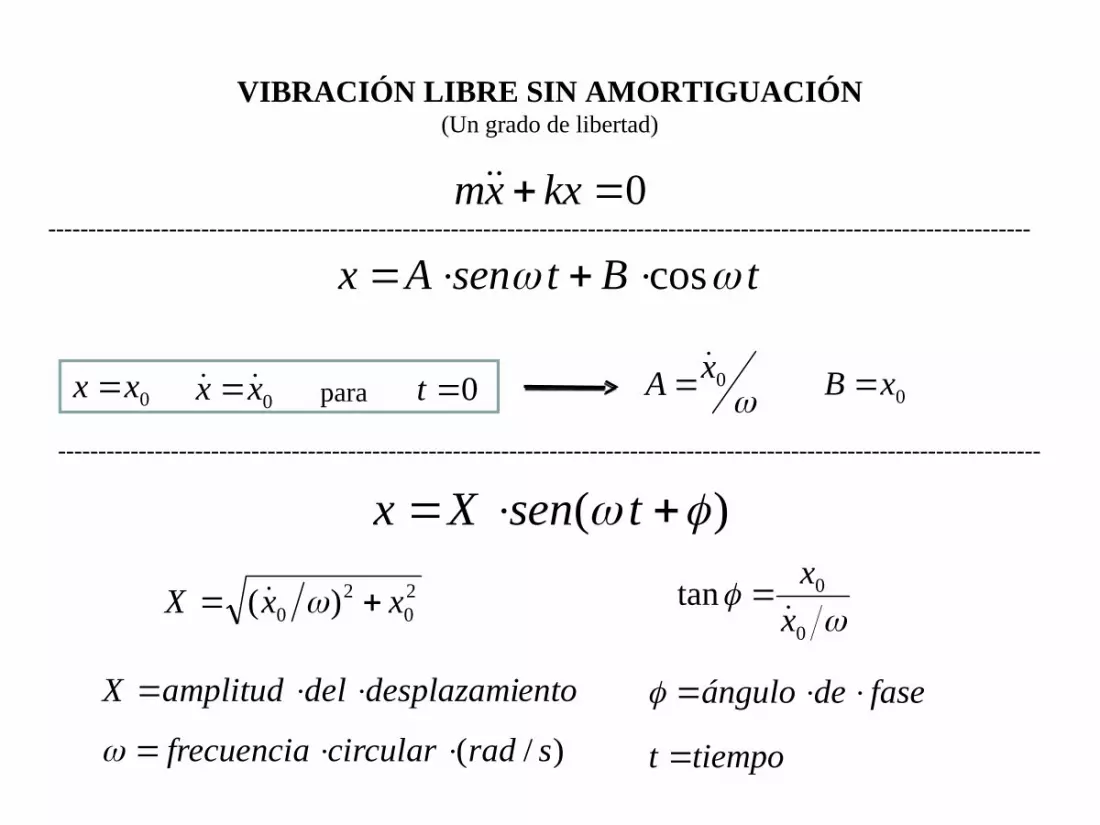
VIBRACIÓN LIBRE SIN AMORTIGUACIÓN(Un grado de libertad)
0 kxxm
--------------------------------------------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------------------------------------------
tBtsenAx cos
0xx 0xx 0t 0xA 0xB
)( tsenXx20
20 )( xxX
0
0tanx
x
entodesplazamidelamplitudX fasedeángulo
)/( sradcircularfrecuencia tiempot
para
FIN