vapros 14 15
TRANSCRIPT
З А П И С К И по
ТЕХНИЧЕСКИ СРЕДСТВА ЗА
АВТОМАТИЗАЦИЯТА
- 1 -
ПРЕОБРАЗУВАТЕЛИ НА ВИДА НА ЕНЕРГИЯТА НА
СИГНАЛИТЕ
Обобщена блокова схема на преобразуватели на вида на енергията на
сигналите
Значителна част от средствата за получаване на информация са и органи
за първичното й преобразуване. Видът на енергията на входните и изходни им
сигнали не винаги съвпада. Видът на енергия е характерен признак при
класификацията на техническите средства за автоматизация. По този признак
може да се разграничат три вида системи:
а) електрически – използват енергията на електрически сигнали;
б) пневматични – използват енергията на налягането на въздух;
в) хидравлични – използват енергията на налягането на масло, създадено
от хидроагрегат.
При създаването на системи за управление, особено е важно разумното
съчетаване на устройствата така, щото при дадените конкретни условия в най-
голяма степен да проявяват своите положителни свойства. Системите за уп-
равление, в които намират приложение средства, основаващи се на използва-
нето на сигнали с различен вид енергия представляват комбинирани системи.
Характерна черта на преобразувателите на вида на енергията на сигнали-
те (ПВЕС) е това, че входните и изходните им сигнали се различават един от
друг по вида на използваната енергия.
ПВЕС са устройства, предназначени за съчетаване на средствата за авто-
матичен контрол и управление, отнасящи се към различни системи. ПВЕС се
наричат още междусистемни преобразуватели.
Структурата им често е сходна със структурата на първичните преобра-
зуватели (датчиците, чувствителните елементи). Необходимо е да се подчертае,
че при първичните преобразуватели преобразуването на вида на енергията не е
самоцел. Твърде често при тях входният и изходният сигнали имат една и съ-ща
- 2 -природа. Независимо от фунционалните различия, твърде често се използ-ват
едни и същи физически принципи и технически идеи.
Различават се следните шест групи ПВЕС:
1) eлeктропневматични;
2) електрохидравлични;
3) пневмоелектрически;
4) хидроелектрически;
5) хидропнвматични;
6) пневмохидравлични.
Разбира се, не всички шест групи са намерили еднакво разпространение.
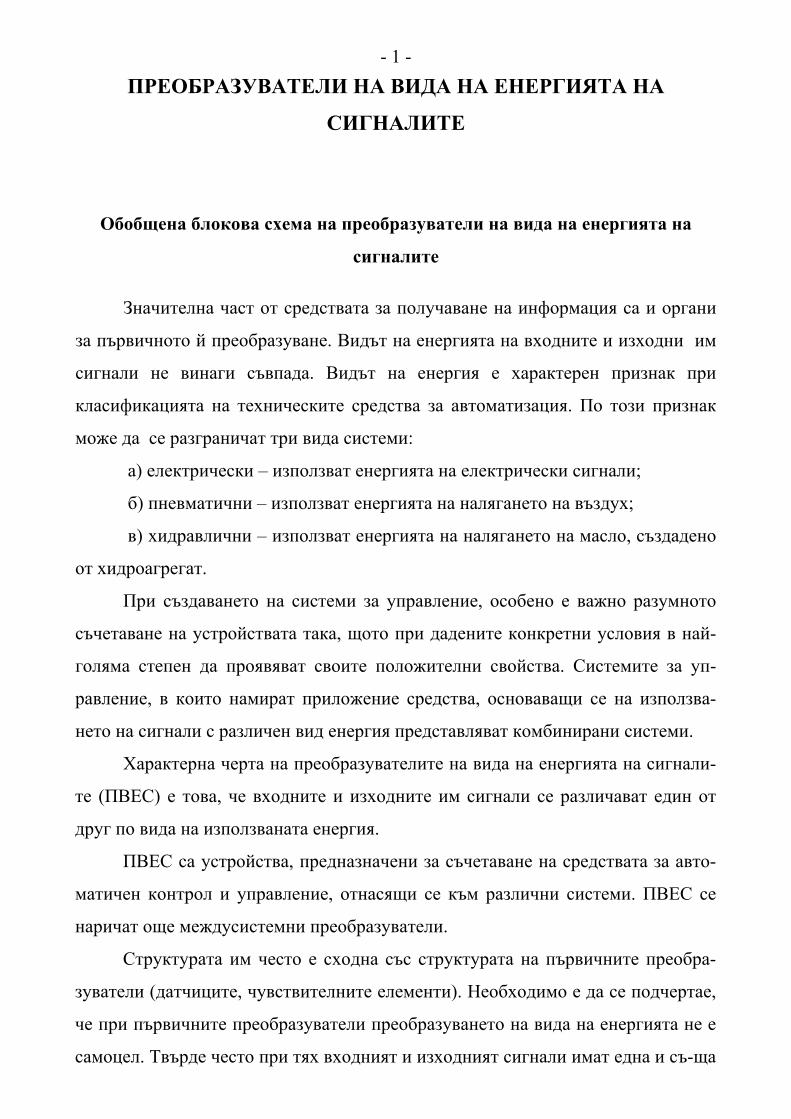
Въз основа на анализа на конкретните схеми на ПВЕС може да се със-
тави обобщена блокова схема, показана на фиг. 1. Входният сигнал ВС, подле-
жащ на по-нататъшно преобразуване, постъпва на входното устройство ВУ.
Фиг. 1. Обобюена блокова схема на ПВЕС
Когато на входа постъпват два и повече сигнала се използва сумиращ
елемент СЕ. Входното устройство си взаимодейства с изходното устройство
ИУ, което формира изходния сигнал ИС. При необходимост се включва и
усилвател У. Ако трябва да се изпълняват по-сложни операции от събиране и
изваждане, се въвежда математичен блок МБ. За подобряване на динамичните и
статични характеристики в много ПВЕС се използва обратна връзка ОВ.
Естствено, не всички елементи от обобщената схема се съдържат във
всеки преобразувател. Някъде някой от посочените блокове ще присъстват в
неявен вид, а другаде съвсем ще отсъстват.
Електропневматични преобразуватели
- 3 -От всички ПВЕС най-голямо разпространение са получили електропнев-
матичните преобразуватели (ЕПП). Те обединяват предимствата на пневматич-
ните изпълнителни устройства и измервателните, регулиращи и изчислител-
ните свойства на електрическите (в това число електронните) системи.
При построяване на ЕПП с входни (във вид на ток или напрежение) и
изходни (във вид на налягане на въздух) сигнали се използват три вида схеми:
- схеми с компенсация на сила;
- схеми с компенсация на преместване;
- отворени схеми.
( )вхвх UI
1l 3l
4l2l
1N 2N 4N 3N
иоP
изхPoP
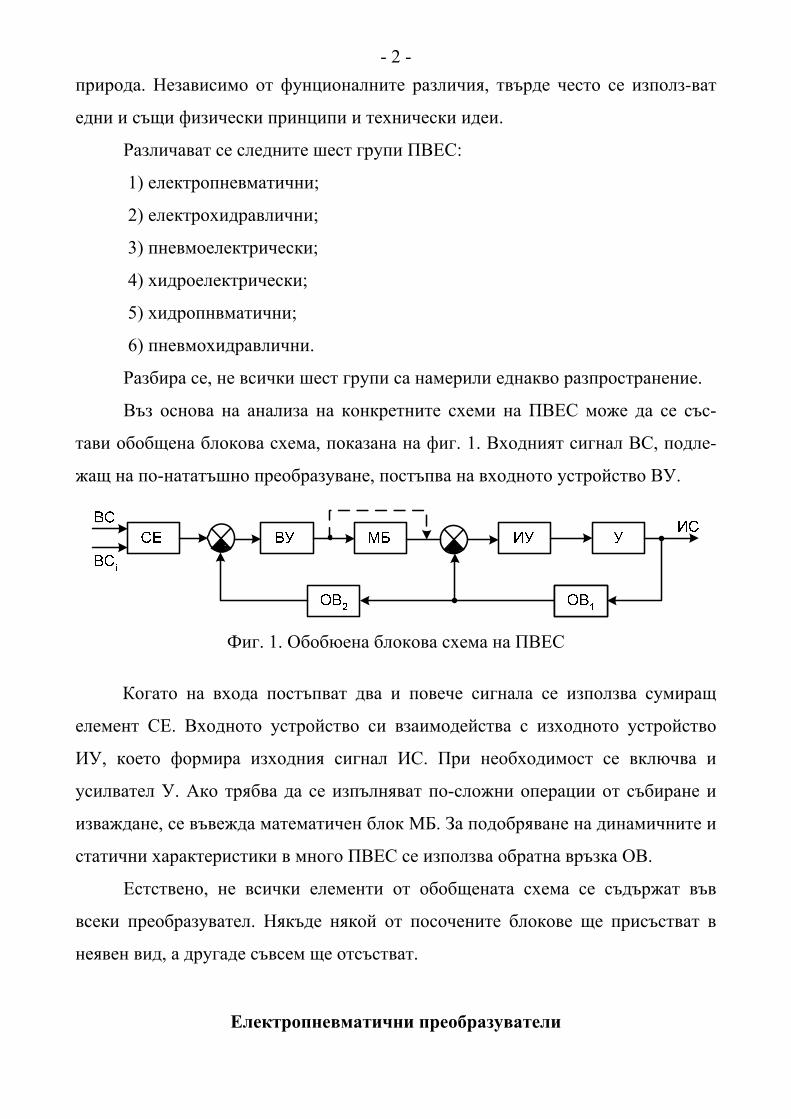
Фиг. 1. Схема на ЕПП с компенсация на сила
Структурната схема на ЕПП с компенсация на сила е показана на фиг. 1.
Електрическото задвижване ЕЗд под въздействие на входния електрически
сигнал Iвх (или Uвх) развива на своето изходно звено сила N1, създаваща момент
N1.l1 относно опорната точка 0 на лоста Л. Действуващ в същото направление
момент N2.l2 създава пружината Пр. Силата N2 определя началното изместване
на изходния сигнал при нулев сигнал на входа (известно е, че изходният сигнал
се изменя в границите от 0,02 до 0,1 MPa).
Отклоненито на лоста от началното положение се възприема от индика-
тора на отклонението ИО. ИО не е идеален детектор и поради това се появява
сила N3. Налягането Pио от изхода на ИО постъпва в усилвателя У. Д
представлява дросел. Под действието на изходното налягане pизх силовият
- 4 -елемент на обратната връзка СЕОВ развива сила N4, която създава момент N4.l4.
Този момент компенсира действието на N1 и N2.
Уравнението на равновесието на лоста Л е
N1.l1 + N2.l2 – N3.l3 – N4.l4 = 0
В динамична интерпретация за уравнението на системата може да се за-
пише:
pизх = k.Iвх.
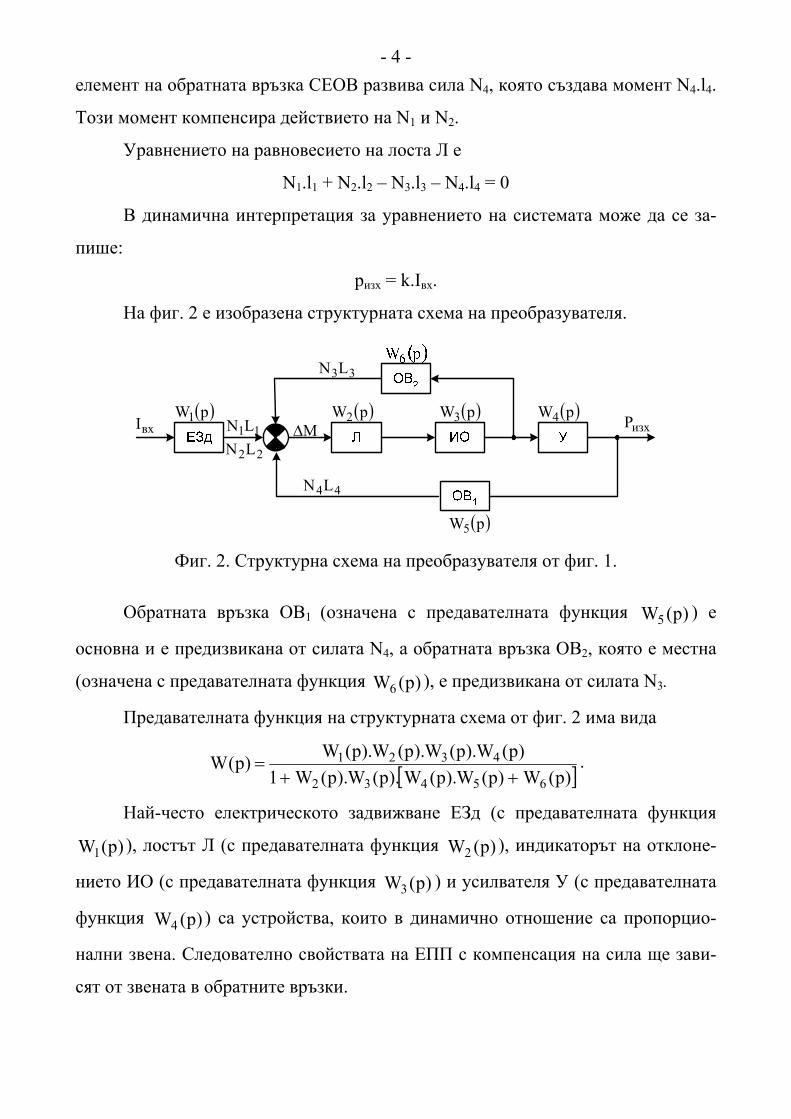
На фиг. 2 е изобразена структурната схема на преобразувателя.
вхI( )pW1 ( )pW3( )pW2 ( )pW4
( )pW5
11LN
22LN
33LN
44LN
MΔ изхP
Фиг. 2. Структурна схема на преобразувателя от фиг. 1.
Обратната връзка ОВ1 (означена с предавателната функция )p(W5 ) е
основна и е предизвикана от силата N4, а обратната връзка ОВ2, която е местна
(означена с предавателната функция )p(W6 ), е предизвикана от силата N3.
Предавателната функция на структурната схема от фиг. 2 има вида
[ ])р(W)р(W).р(W).р(W).р(W1)р(W).р(W).р(W).р(W)p(W
65432
4321++
= .
Най-често електрическото задвижване ЕЗд (с предавателната функция
)p(W1 ), лостът Л (с предавателната функция )p(W2 ), индикаторът на отклоне-
нието ИО (с предавателната функция )p(W3 ) и усилвателя У (с предавателната
функция )p(W4 ) са устройства, които в динамично отношение са пропорцио-
нални звена. Следователно свойствата на ЕПП с компенсация на сила ще зави-
сят от звената в обратните връзки.
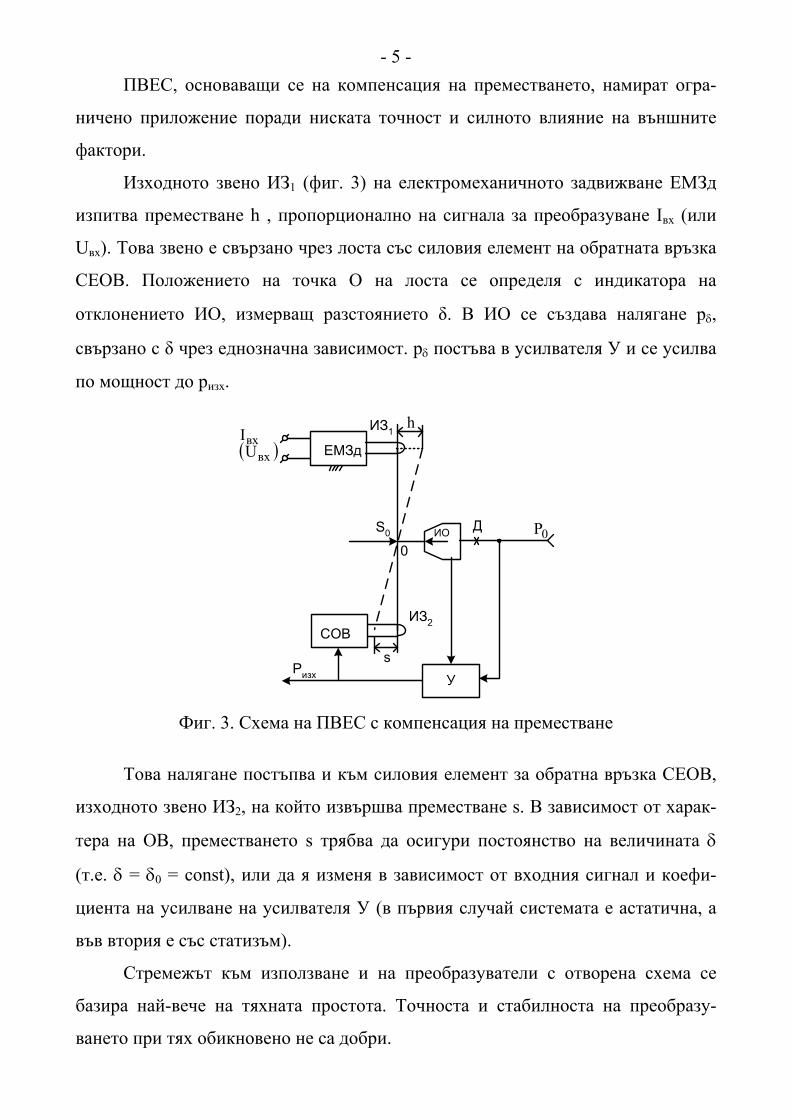
- 5 -ПВЕС, основаващи се на компенсация на преместването, намират огра-
ничено приложение поради ниската точност и силното влияние на външните
фактори.
Изходното звено ИЗ1 (фиг. 3) на електромеханичното задвижване ЕМЗд
изпитва преместване h , пропорционално на сигнала за преобразуване Iвх (или
Uвх). Това звено е свързано чрез лоста със силовия елемент на обратната връзка
СЕОВ. Положението на точка О на лоста се определя с индикатора на
отклонението ИО, измерващ разстоянието δ. В ИО се създава налягане рδ,
свързано с δ чрез еднозначна зависимост. pδ постъва в усилвателя У и се усилва
по мощност до ризх.
ЕМЗд
У
ДИО
СОВ
( )вхвхU
I ИЗ1
ИЗ2
h
S0
0
Pизх
s
0P
Фиг. 3. Схема на ПВЕС с компенсация на преместване
Това налягане постъпва и към силовия елемент за обратна връзка СЕОВ,
изходното звено ИЗ2, на който извършва преместване s. В зависимост от харак-
тера на ОВ, преместването s трябва да осигури постоянство на величината δ
(т.е. δ = δ0 = const), или да я изменя в зависимост от входния сигнал и коефи-
циента на усилване на усилвателя У (в първия случай системата е астатична, а
във втория е със статизъм).
Стремежът към използване и на преобразуватели с отворена схема се
базира най-вече на тяхната простота. Точноста и стабилноста на преобразу-
ването при тях обикновено не са добри.
- 6 -
Електрохидравлични преобразуватели
От всички видове ПВЕС най-добре са описани в литературата електро-
хидравличните. Причина за това е, че те най-рано започват да се създават. Изходните сигнали на електрохидравличните преобразуватели се използ-
ват като правило за непосредствено въздействие върху изпълнителни механиз-
ми. Поради това те притежават и достатъчно голяма изходна мощност. Пове-
чето преобразуватели са съчетани с хидравлични усилватели. Задачите, реша-
вани с помощта на електрохидравличния преобразувател в значителна степен
зависят от вида на използувания хидравличен изпълнителен механизъм.
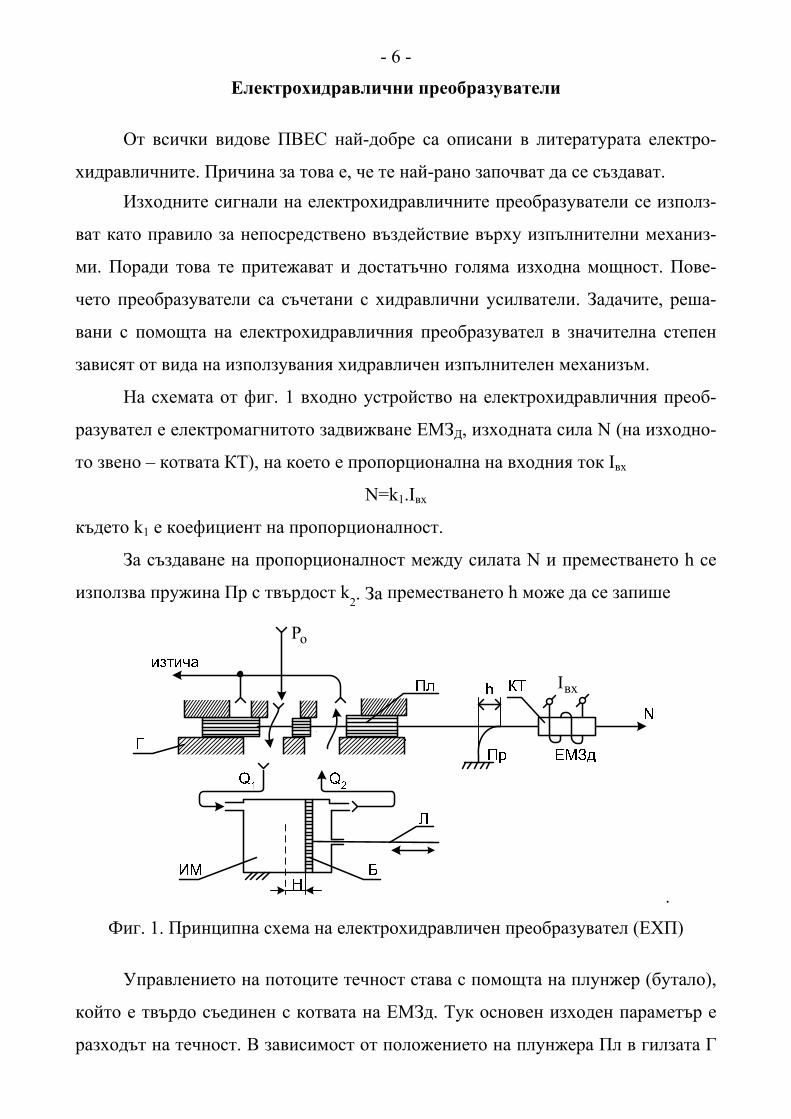
На схемата от фиг. 1 входно устройство на електрохидравличния преоб-
разувател е електромагнитото задвижване ЕМЗД, изходната сила N (на изходно-
то звено – котвата КТ), на което е пропорционална на входния ток Iвх
N=k1.Iвх
където k1 е коефициент на пропорционалност.
За създаване на пропорционалност между силата N и преместването h се
използва пружина Пр с твърдост k2. За преместването h може да се запише
вхI
oP
.
Фиг. 1. Принципна схема на електрохидравличен преобразувател (ЕХП)
Управлението на потоците течност става с помощта на плунжер (бутало),
който е твърдо съединен с котвата на ЕМЗд. Тук основен изходен параметър е
разходът на течност. В зависимост от положението на плунжера Пл в гилзата Г
- 7 -се изменя разходът Q1 (вливаща се течност) и Q2 – изтичаща течност. Отчитай-
ки, че течностите са практически несвиваеми, може да се запише:
Q1 = Q2 = Q.
Ако се приеме, че разходът е пропорционален на преместването на плун-
жера относно неутралното му положение, то
вх2
313 I.
kk.kh.kQ == .
Под действието на този разход буталото Б, заедно с лоста Л на изпъл-
нителния механизъм ИМ ще се премества надясно. Относно преместването Н
може да се запише:
∫=t
0вх
2
31 dt.IS.k
k.kH ,
където S е напречната площ на буталото. От последния израз се вижда, че в
разгледаната система не се постига зададено съответствие между положението
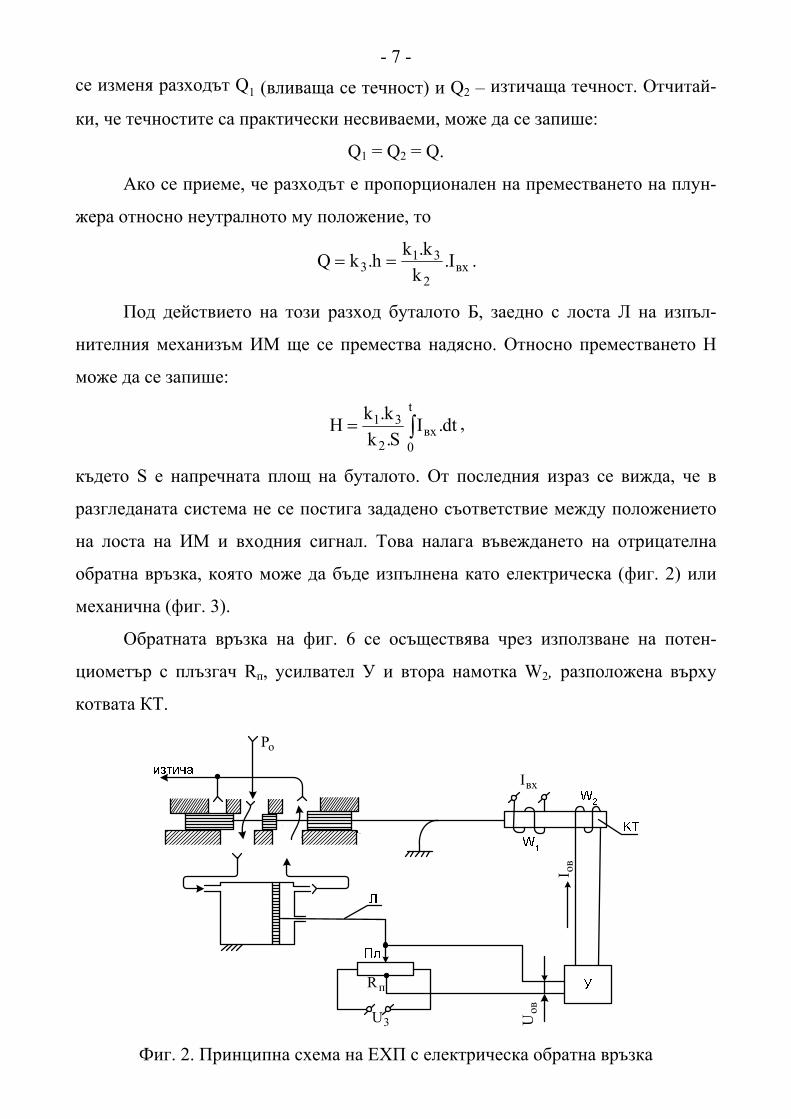
на лоста на ИМ и входния сигнал. Това налага въвеждането на отрицателна
обратна връзка, която може да бъде изпълнена като електрическа (фиг. 2) или
механична (фиг. 3).
Обратната връзка на фиг. 6 се осъществява чрез използване на потен-
циометър с плъзгач Rп, усилвател У и втора намотка W2, разположена върху
котвата КТ.
вхI
oP
овI
овU3U
пR
Фиг. 2. Принципна схема на ЕХП с електрическа обратна връзка
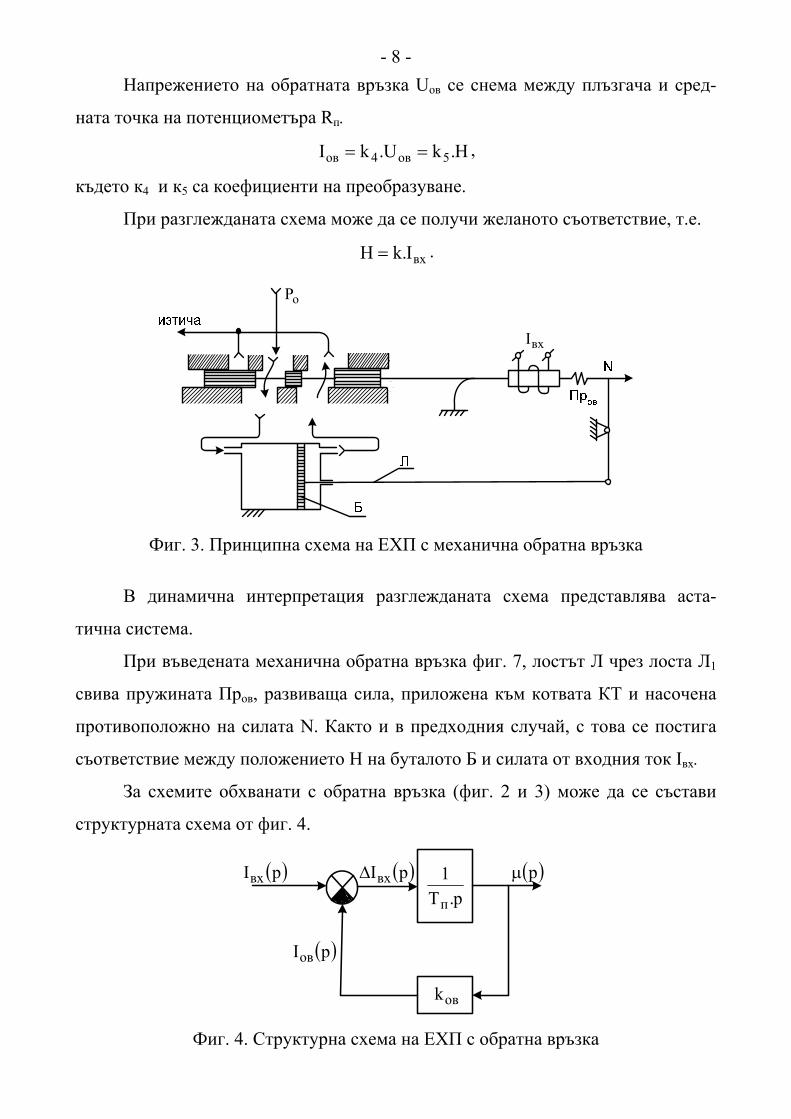
- 8 -Напрежението на обратната връзка Uов се снема между плъзгача и сред-
ната точка на потенциометъра Rп.
H.kU.kI 5ов4ов == ,
където к4 и к5 са коефициенти на преобразуване.
При разглежданата схема може да се получи желаното съответствие, т.е.
вхI.kH = .
вхI
oP
Фиг. 3. Принципна схема на ЕХП с механична обратна връзка
В динамична интерпретация разглежданата схема представлява аста-
тична система.
При въведената механична обратна връзка фиг. 7, лостът Л чрез лоста Л1
свива пружината Пров, развиваща сила, приложена към котвата КТ и насочена
противоположно на силата N. Както и в предходния случай, с това се постига
съответствие между положението H на буталото Б и силата от входния ток Iвх.
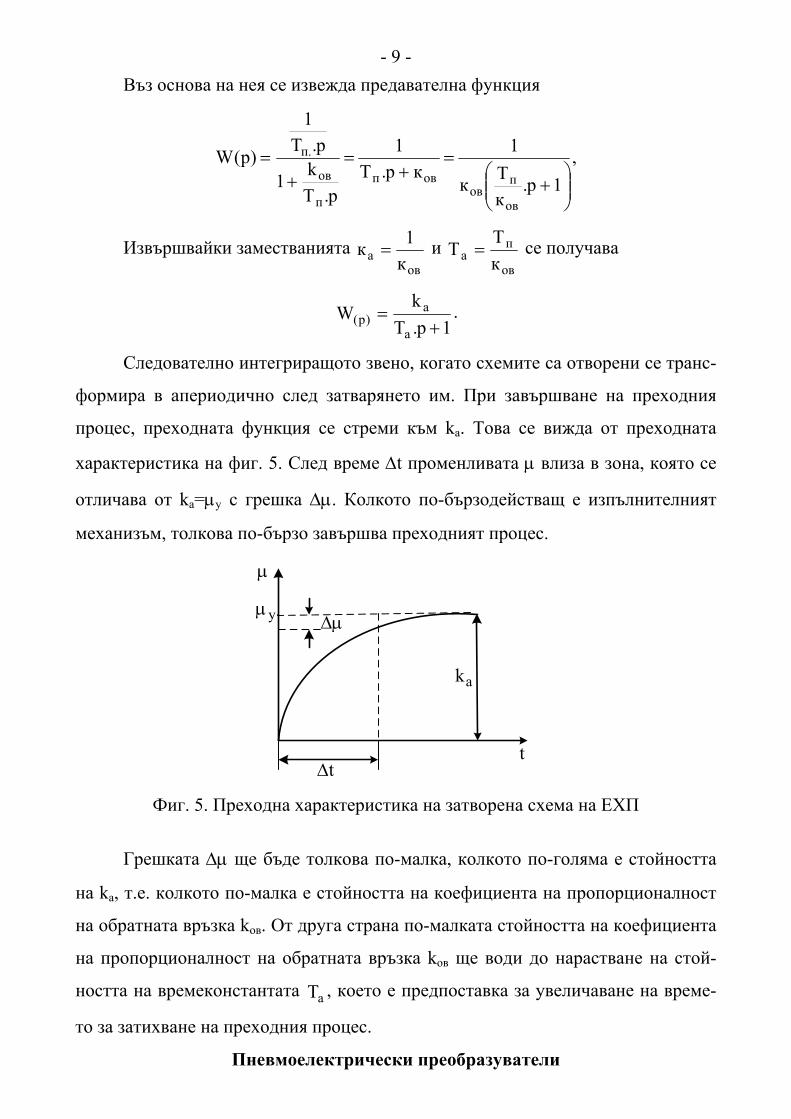
За схемите обхванати с обратна връзка (фиг. 2 и 3) може да се състави
структурната схема от фиг. 4.
р.Т1п
( )pIвх
( )pIов
( )pIвхΔ ( )рμ
овk
Фиг. 4. Структурна схема на ЕХП с обратна връзка
- 9 -Въз основа на нея се извежда предавателна функция
,1р.
кТк
1кр.Т
1
р.Тk1
p.T1
)р(W
ов
пов
овп
п
oв
.п
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=+
=+
=
Извършвайки заместванията ов
а к1к = и
ов
па к
ТТ = се получава
1p.Tk
Wa
a)p( += .
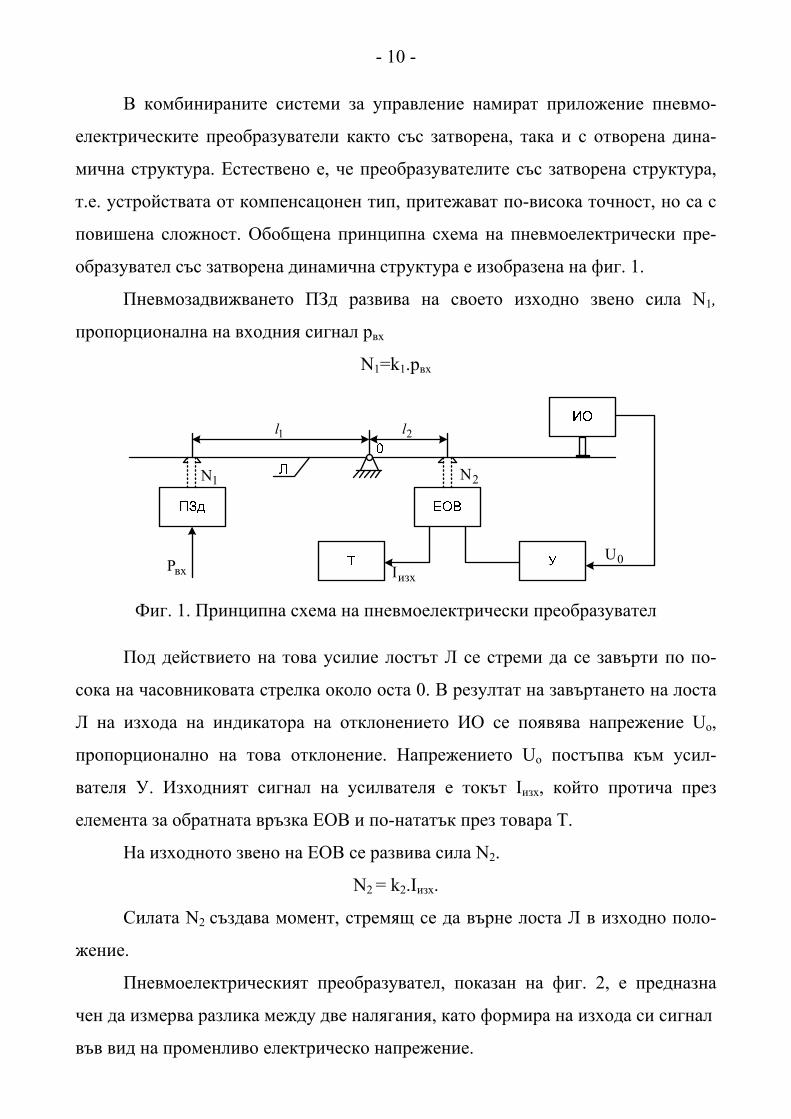
Следователно интегриращото звено, когато схемите са отворени се транс-
формира в апериодично след затварянето им. При завършване на преходния
процес, преходната функция се стреми към ka. Това се вижда от преходната
характеристика на фиг. 5. След време Δt променливата μ влиза в зона, която се
отличава от ka=μу с грешка Δμ. Колкото по-бързодействащ е изпълнителният
механизъм, толкова по-бързо завършва преходният процес.
μ
yμ μΔ
ttΔ
ak
Фиг. 5. Преходна характеристика на затворена схема на ЕХП
Грешката Δμ ще бъде толкова по-малка, колкото по-голяма е стойността
на ka, т.е. колкото по-малка е стойността на коефициента на пропорционалност
на обратната връзка kов. От друга страна по-малката стойността на коефициента
на пропорционалност на обратната връзка kов ще води до нарастване на стой-
ността на времеконстантата аT , което е предпоставка за увеличаване на време-
то за затихване на преходния процес.
Пневмоелектрически преобразуватели
- 10 -
В комбинираните системи за управление намират приложение пневмо-
електрическите преобразуватели както със затворена, така и с отворена дина-
мична структура. Естествено е, че преобразувателите със затворена структура,
т.е. устройствата от компенсацонен тип, притежават по-висока точност, но са с
повишена сложност. Обобщена принципна схема на пневмоелектрически пре-
образувател със затворена динамична структура е изобразена на фиг. 1.
Пневмозадвижването ПЗд развива на своето изходно звено сила N1,
пропорционална на входния сигнал pвх
N1=k1.pвх
1l 2l
вхPизхI
0U
2N1N
Фиг. 1. Принципна схема на пневмоелектрически преобразувател
Под действието на това усилие лостът Л се стреми да се завърти по по-
сока на часовниковата стрелка около оста 0. В резултат на завъртането на лоста
Л на изхода на индикатора на отклонението ИО се появява напрежение Uo,
пропорционално на това отклонение. Напрежението Uо постъпва към усил-
вателя У. Изходният сигнал на усилвателя е токът Iизх, който протича през
елемента за обратната връзка ЕОВ и по-нататък през товара Т.
На изходното звено на ЕОВ се развива сила N2.
N2 = k2.Iизх.
Силата N2 създава момент, стремящ се да върне лоста Л в изходно поло-
жение.
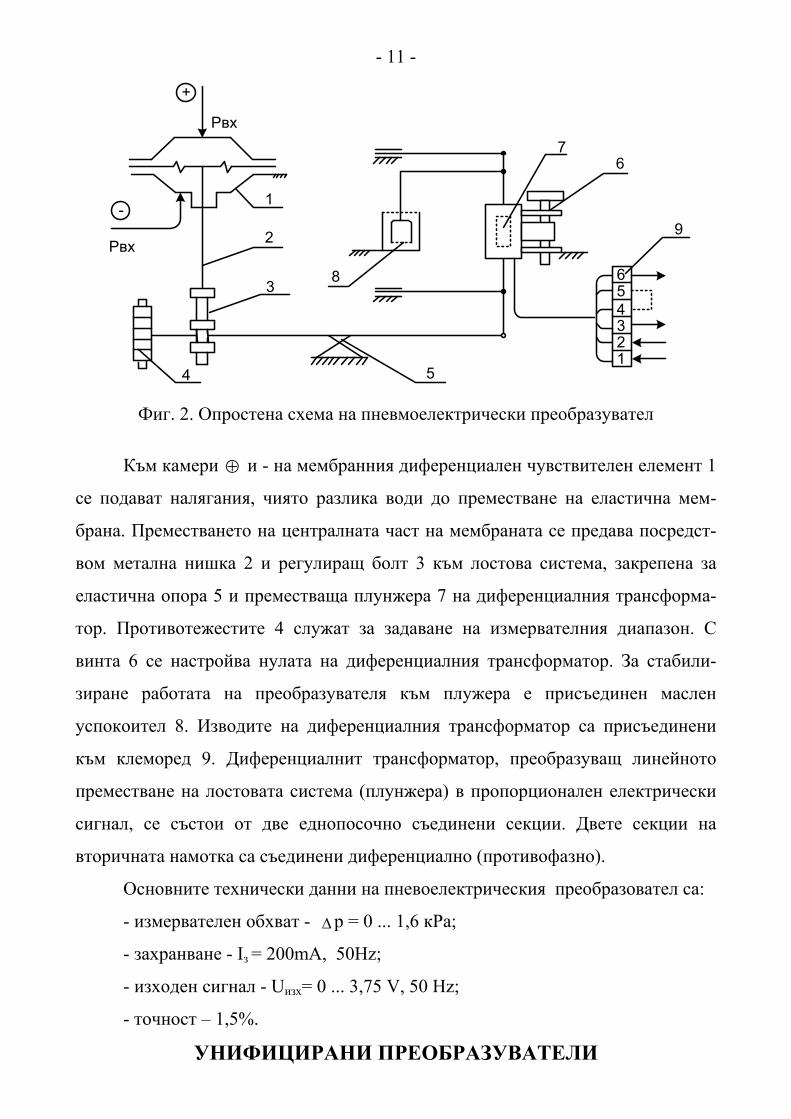
Пневмоелектрическият преобразувател, показан на фиг. 2, е предназна
чен да измерва разлика между две налягания, като формира на изхода си сигнал
във вид на променливо електрическо напрежение.
- 11 -
+
-
Pвх
Pвх
1
2
3
4 5
67
8
9
6
12345
Фиг. 2. Опростена схема на пневмоелектрически преобразувател
Към камери ⊕ и - на мембранния диференциален чувствителен елемент 1
се подават налягания, чиято разлика води до преместване на еластична мем-
брана. Преместването на централната част на мембраната се предава посредст-
вом метална нишка 2 и регулиращ болт 3 към лостова система, закрепена за
eластична опора 5 и преместваща плунжера 7 на диференциалния трансформа-
тор. Противотежестите 4 служат за задаване на измервателния диапазон. С
винта 6 се настройва нулата на диференциалния трансформатор. За стабили-
зиране работата на преобразувателя към плужера е присъединен маслен
успокоител 8. Изводите на диференциалния трансформатор са присъединени
към клеморед 9. Диференциалнит трансформатор, преобразуващ линейното
преместване на лостовата система (плунжера) в пропорционален електрически
сигнал, се състои от две еднопосочно съединени секции. Двете секции на
вторичната намотка са съединени диференциално (противофазно).
Основните технически данни на пневоелектрическия преобразовател са:
- измервателен обхват - Δр = 0 ... 1,6 кРа;
- захранване - Iз = 200mA, 50Hz;
- изходен сигнал - Uизх= 0 ... 3,75 V, 50 Hz;
- точност – 1,5%.
УНИФИЦИРАНИ ПРЕОБРАЗУВАТЕЛИ
- 12 -
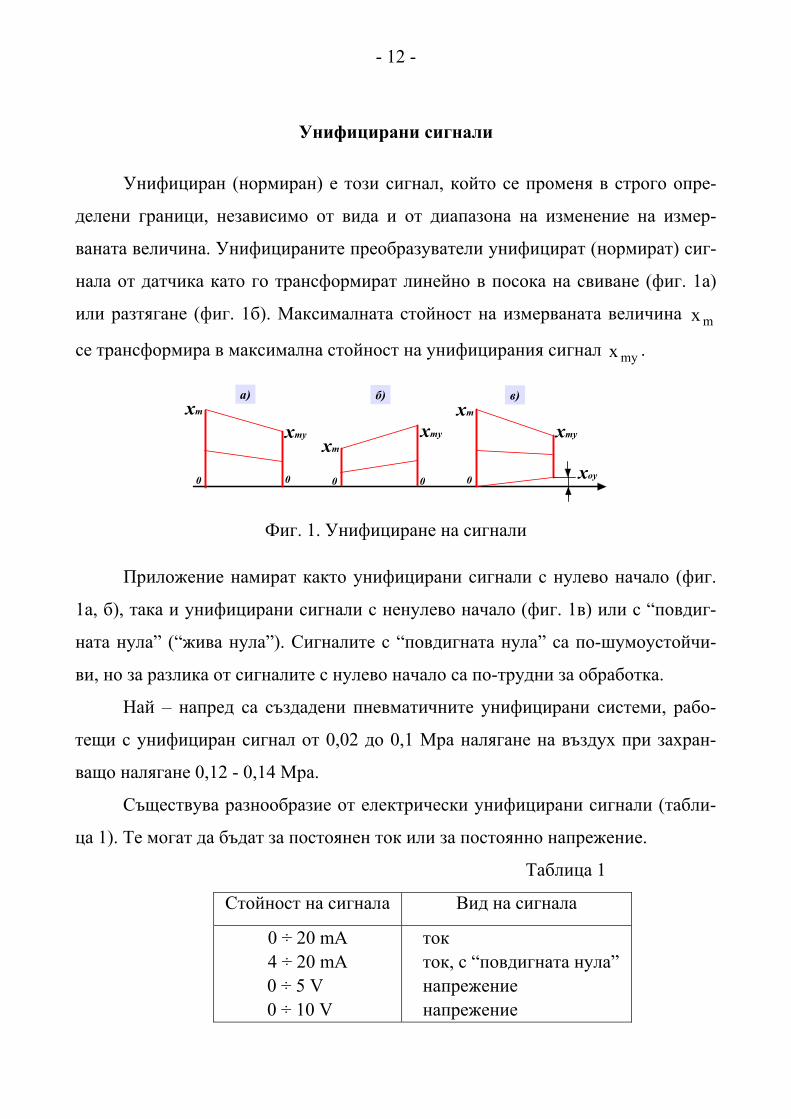
Унифицирани сигнали
Унифициран (нормиран) е този сигнал, който се променя в строго опре-
делени граници, независимо от вида и от диапазона на изменение на измер-
ваната величина. Унифицираните преобразуватели унифицират (нормират) сиг-
нала от датчика като го трансформират линейно в посока на свиване (фиг. 1а)
или разтягане (фиг. 1б). Максималната стойност на измерваната величина mx
се трансформира в максимална стойност на унифицирания сигнал myx .
a) б) в)xm
xmy xmyxm
0 0 0 0
xmy
0
xm
xoy
Фиг. 1. Унифициране на сигнали
Приложение намират както унифицирани сигнали с нулево начало (фиг.
1а, б), така и унифицирани сигнали с ненулево начало (фиг. 1в) или с “повдиг-
ната нула” (“жива нула”). Сигналите с “повдигната нула” са по-шумоустойчи-
ви, но за разлика от сигналите с нулево начало са по-трудни за обработка.
Най – напред са създадени пневматичните унифицирани системи, рабо-
тещи с унифициран сигнал от 0,02 до 0,1 Mpa налягане на въздух при захран-
ващо налягане 0,12 - 0,14 Mpa.
Съществува разнообразие от електрически унифицирани сигнали (табли-
ца 1). Те могат да бъдат за постоянен ток или за постоянно напрежение.
Таблица 1
Стойност на сигнала Вид на сигнала
0 ÷ 20 mA 4 ÷ 20 mA
0 ÷ 5 V 0 ÷ 10 V
ток ток, с “повдигната нула” напрежение напрежение
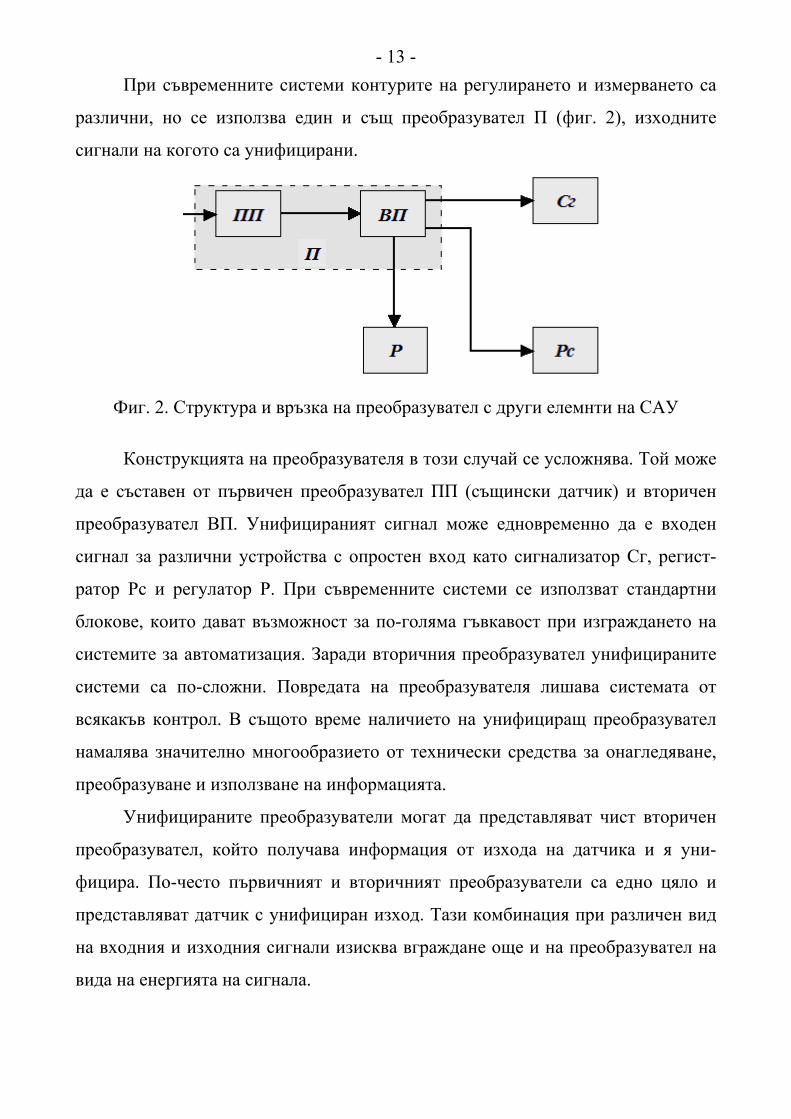
- 13 -При съвременните системи контурите на регулирането и измерването са
различни, но се използва един и същ преобразувател П (фиг. 2), изходните
сигнали на когото са унифицирани.
Фиг. 2. Структура и връзка на преобразувател с други елемнти на САУ
Конструкцията на преобразувателя в този случай се усложнява. Той може
да е съставен от първичен преобразувател ПП (същински датчик) и вторичен
преобразувател ВП. Унифицираният сигнал може едновременно да е входен
сигнал за различни устройства с опростен вход като сигнализатор Cг, регист-
ратор Рс и регулатор Р. При съвременните системи се използват стандартни
блокове, които дават възможност за по-голяма гъвкавост при изграждането на
системите за автоматизация. Заради вторичния преобразувател унифицираните
системи са по-сложни. Повредата на преобразувателя лишава системата от
всякакъв контрол. В същото време наличието на унифициращ преобразувател
намалява значително многообразието от технически средства за онагледяване,
преобразуване и използване на информацията.
Унифицираните преобразуватели могат да представляват чист вторичен
преобразувател, който получава информация от изхода на датчика и я уни-
фицира. По-често първичният и вторичният преобразуватели са едно цяло и
представляват датчик с унифициран изход. Тази комбинация при различен вид
на входния и изходния сигнали изисква вграждане още и на преобразувател на
вида на енергията на сигнала.
- 14 -Унифициран преобразувател (трансмитер) TRB(I)
Трансмитерът TRB(I) на фирма Comeco позволява на потребителя да
избира вида и обхвата на входния сигнал, да въвежда корекция на нулата и да
калибрира изхода, да задава границите на входа и вида и предавателната
функция на изхода, да избира мерната единица, позицията на десетичната
точка и реакцията на изхода при липса на входен сигнал и да настройва
цифровите филтри. На фиг. 1 е показан трансмитер Comeco TRB(I).
Фиг. 1. Трансмитер Comeco TRB(I)
Техническите характеристики на трансмитер Comeco TRB(I) са
показани в Таблица 1.
1. Блокова схема на трансмитер Comeco TRB(I)
Блоковата схема на преобразувателя представлява конфигурация от
функционални блокове. Тя е показана на фиг. 2.
Фиг. 2. Блокова схема на унифициран преобразувател
АВ - аналогов вход; УБ - управляващ блок; АИ - аналогов изход; ЛУ - локално
управление; КБ - комуникационен блок
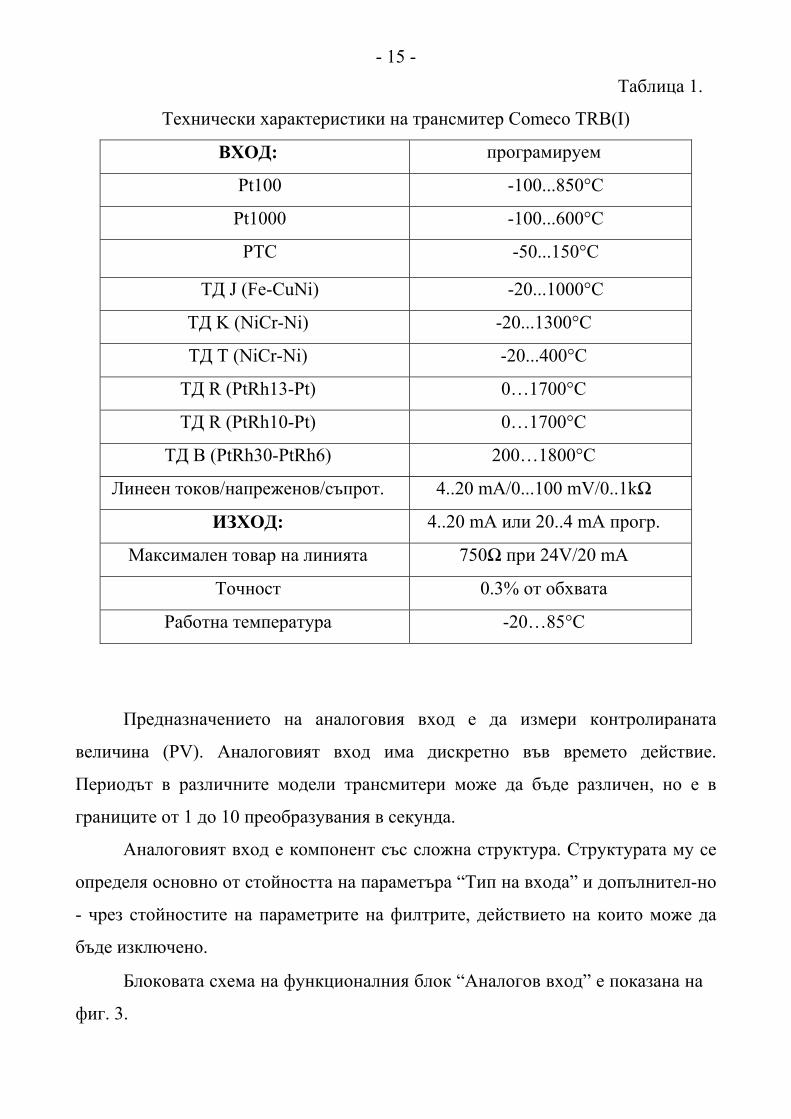
- 15 -Таблица 1.
Технически характеристики на трансмитер Comeco TRB(I)
ВХОД: програмируем
Pt100 -100...850°C
Pt1000 -100...600°C
PTC -50...150°C
ТД J (Fe-CuNi) -20...1000°C
ТД K (NiCr-Ni) -20...1300°C
ТД T (NiCr-Ni) -20...400°C
ТД R (PtRh13-Pt) 0…1700°C
ТД R (PtRh10-Pt) 0…1700°C
ТД B (PtRh30-PtRh6) 200…1800°C
Линеен токов/напреженов/съпрот. 4..20 mA/0...100 mV/0..1kΩ
ИЗХОД: 4..20 mA или 20..4 mA прогр.
Максимален товар на линията 750Ω при 24V/20 mA
Точност 0.3% от обхвата
Работна температура -20…85°С
Предназначението на аналоговия вход е да измери контролираната
величина (PV). Аналоговият вход има дискретно във времето действие.
Периодът в различните модели трансмитери може да бъде различен, но е в
границите от 1 до 10 преобразувания в секунда.
Аналоговият вход е компонент със сложна структура. Структурата му се
определя основно от стойността на параметъра “Тип на входа” и допълнител-но
- чрез стойностите на параметрите на филтрите, действието на които може да
бъде изключено.
Блоковата схема на функционалния блок “Аналогов вход” е показана на
фиг. 3.
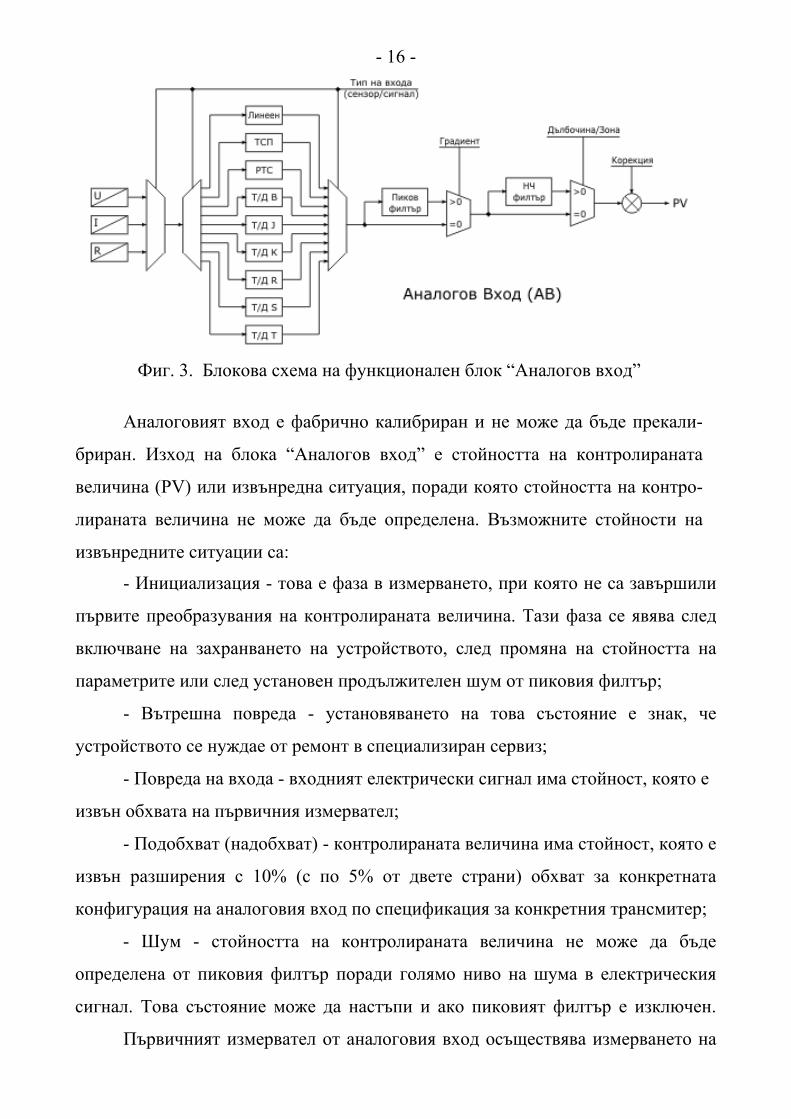
- 16 -
Фиг. 3. Блокова схема на функционален блок “Аналогов вход”
Аналоговият вход е фабрично калибриран и не може да бъде прекали-
бриран. Изход на блока “Аналогов вход” е стойността на контролираната
величина (PV) или извънредна ситуация, поради която стойността на контро-
лираната величина не може да бъде определена. Възможните стойности на
извънредните ситуации са:
- Инициализация - това е фаза в измерването, при която не са завършили
първите преобразувания на контролираната величина. Тази фаза се явява след
включване на захранването на устройството, след промяна на стойността на
параметрите или след установен продължителен шум от пиковия филтър;
- Вътрешна повреда - установяването на това състояние е знак, че
устройството се нуждае от ремонт в специализиран сервиз;
- Повреда на входа - входният електрически сигнал има стойност, която е
извън обхвата на първичния измервател;
- Подобхват (надобхват) - контролираната величина има стойност, която е
извън разширения с 10% (с по 5% от двете страни) обхват за конкретната
конфигурация на аналоговия вход по спецификация за конкретния трансмитер;
- Шум - стойността на контролираната величина не може да бъде
определена от пиковия филтър поради голямо ниво на шума в електрическия
сигнал. Това състояние може да настъпи и ако пиковият филтър е изключен.
Първичният измервател от аналоговия вход осъществява измерването на
- 17 -стойността на електрическия сигнал, носител на стойността на контролираната
величина (PV) и включва следните елементи:
- измервател на постоянно напрежение;
- измервател на постоянен ток;
- измервател на съпротивление.
Преобразувателят от аналоговия вход изчислява стойността на
контролираната величина на база на измерената от първичния преобразувател
стойност. Преобразувателите на температурните датчици изчисляват
стойността на контролираната величина в дименсия, съответна на стойността на
параметъра “Аналогов вход/Мерна единица”.
Преобразувателят се състои от следните елементи:
- Линеен преобразувател - осъществява линейно преобразуване на
измерената от първичния измервател стойност в стойност на контролираната
величина. За изчисленията използва параметрите ”Обхват/Долна граница” и
“Обхват/Горна граница”, в дименсията на контролираната величина, които
отговарят, съответно, на долната и горната стойности на обхвата на
електрическия сигнал.
- Преобразувател съпротивление - температура според градуировката за
платинови термосъпротивителни датчици (ТСП);
- Преобразувател съпротивление - температура според градуировката за
полупроводникови термосъпротивителни датчици с положителен температурен
коефициент (PTC);
- Преобразувател напрежение - температура според градуировката за
термодвойка тип B;
- Преобразувател напрежение - температура според градуировката за
термодвойка тип J;
- Преобразувател напрежение - температура според градуировката за
термодвойка тип K;
- Преобразувател напрежение - температура според градуировката за
термодвойка тип R;
- 18 -- Преобразувател напрежение - температура според градуировката за
термодвойка тип S;
- Преобразувател напрежение - температура според градуировката за
термодвойка тип T.
Пиковият филтър е предназначен за отстраняване на насложени върху
сигнала спорадични смущения. Принципът на действие на филтъра се
основава на предположението за ограничено възможно изменение на
моментната стойност на контролираната величина (между две последова-
телни измервания). Този филтър се определя от параметъра “Пиков
филтър/Градиент”. Този параметър изисква неотрицателни числови стой-
ности, а стойност нула изключва действието на филтъра.
Всяка положителна стойност на “Градиент” се интерпретира като едно
максимално допустимо изменение на входния сигнал между две
последователни измервания. Всяка измерена стойност се сравнява
последователно с предната. Ако разликата между двете последователни
измервания е по-малка от стойност на “Градиент” сигналът се приема за
нормален. В противен случай изходът на филтъра запазва старата стойност,
докато не определи присъствие на нормален сигнал. Това се постига само ако
входният сигнал не се е изменил с повече от стойността на “Градиент” за 4
последователни измервания. В случай, че филтърът не определи нормален
сигнал повече от 20 последователни измервания се генерира съобщение за
силно зашумен сигнал (noiS).
Нискочестотният филтър има предавателна функция на апериодично
(инерционно) звено от първи ред. Предназначен е да подтиска високочестот-
ните съставки в сигнала на контролираната величина с цел да се намали
влиянието на насложния високочестотен шум в тракта между първичния
преобразувател и трансмитера, както и в първичния измервател от аналоговия
вход. Този филтър използва параметрите “Нискочестотен филтър/ Дълбочина”
и ”Нискочестотен филтър/Зона на действие”. И двата параметъра изискват
неотрицателни стойности. Стойност нула, на който да е от двата параметъра
- 19 -изключва действието на филтъра.
Параметърът “Дълбочина” пропорционално определя времеконстантата
на филтъра. Точната формула за съответствието не е дадена, тъй като зависи от
конкретната реализация на трансмитера и може да бъде различна за различните
модели трансмитери. Препоръчително е опитното установяване на стойността,
при която работата на филтъра е задоволява поставените изисквания.
Ако постъпващата на входа на филтъра стойност е извън “Зона на
действие”, филтърът я пропуска без да извършва филтрация. Работната област е
от двете страни на текущата изходна за филтъра стойност като всяка от тях е в
размер, определен от стойността на параметъра “Зона на действие”. Тази
функционалност на филтъра има за цел да ограничи действието на филтъра
само при бавни изменения на контролираната величина, за да не влияе на
динамиката на системата, като внася допълнително закъснение. Разбира се
“Зона на действие” може да бъде направена и достатъчно широка.
Определянето й е задължение на системния интегратор.
Предвидена е възможност за постоянно отместване (корекция) на
стойността на контролираната величина (PV) с цел намаляване на неточността
на първичния преобразувател.Стойността на контролираната величина се
измества със стойността на параметъра ”Аналогов вход/Корекция”. Стойността
на този параметър може да е съответно положителна, отрицателна или нула.
Управляващият блок е предназначен е да задава стойността на аналоговия
изход. Той има два режима на работа - ръчен и автоматичен.
Автоматичният режимът на работа е нормалният режим на блока. При
него стойността на изхода се определя като линейно преобразуване на
стойността на контролираната величина съответно според параметрите “Обхват
на преобразуване/За изход минимум” и “Обхват на преобразуване/За изход
максимум”. Преобразуването се извършва за пълния обхват на аналоговия
изход (за който е калибриран).
В случаите, когато стойността на контролираната величина не е
определена или стойността на параметъра Код за грешка от конфигурацията на
- 20 -трансмитера отразява наличие на несъответствия в конфигурацията на
трансмитера, управляващият блок установява изхода на стойност под обхвата
или над обхвата, съответно на стойността на параметъра ”Други/Изход при
грешка”. Това са граничните хардуерно възможни стойности на аналоговия
изход. Ако стойността на параметъра “Код за грешка” от конфигурацията на
трансмитера отразява, че не излиза контролната сума на параметрите от
конфигурацията на трансмитера, управляващият блок установява изхода под
обхвата.
Ръчният режим е предназначен за калибриране и проверка на аналоговия
изход. При него изходът се установява в зададена от потребителя стойност в
калибрирания обхват.
Аналоговият изход извежда стойността, определена от управляващия
блок като съответен електрически сигнал. Аналоговият изход може да има
повече от един изходен канал.При някои модели трансмитери изходните канали
могат да се използват едновременно, а при други не. Причината е, че вторите
модели трансмитери могат да поддържат само един от изходните каналите
калибриран. При тях при смяна на използвания канал, съответният трябва да
бъде калибриран преди да бъде използван. Всеки канал може да бъде
калибриран за работа в произволен под-обхват на хардуерно реализирания.
Функционалният блок “Локално управление” съхранява параметрите на
трансмитера и следи за техния интегритет. В контекста на комуникацията,
съгласно OSI спецификацията, това е единствения елемент (Service Element) в
приложния слой - LMSE (Local Management Service Element). Нормално този
блок приема стойностите на параметрите без ограничения, но след всяка
промяна проверява за евентуални ограничения в стойностите на параметрите
като цяло. Наличието или липсата на такива несъответствия се отразява в
параметъра “Код за грешка” от конфигурацията на трансмитера.
Комуникационният блок е предназначен за осъществяване на
комуникация с друга апаратура. Той изпълнява стандартен протокол и няма
параметри.
- 21 -2. Конфигуриране на програмата за трансмитера
Под конфигуриране на програмата се разбира цялата информация,
необходима за осъществяване възможностите на програмата. Необходимо е да
се прави разлика с конфигурация на трансмитера, която е само част от
конфигурирането на програмата.
Конфигурирането съдържа следните раздели:
- Конфигурация на трансмитера - съдържа стойностите на параметрите на
трансмитера, които са прочетени от свързан към системата трансмитер или са
подготвени за запис в свързан към системата трансмитер.
- Настройки на програмата - съдържа стойностите на параметри, които
управляват поведението на програмата.
- Настройки на потребителския интерфейс - информация, която позволява
да се възстановява изгледа на потребителския интерфейс (кои прозорци са
отворени, къде са разположени и др.).
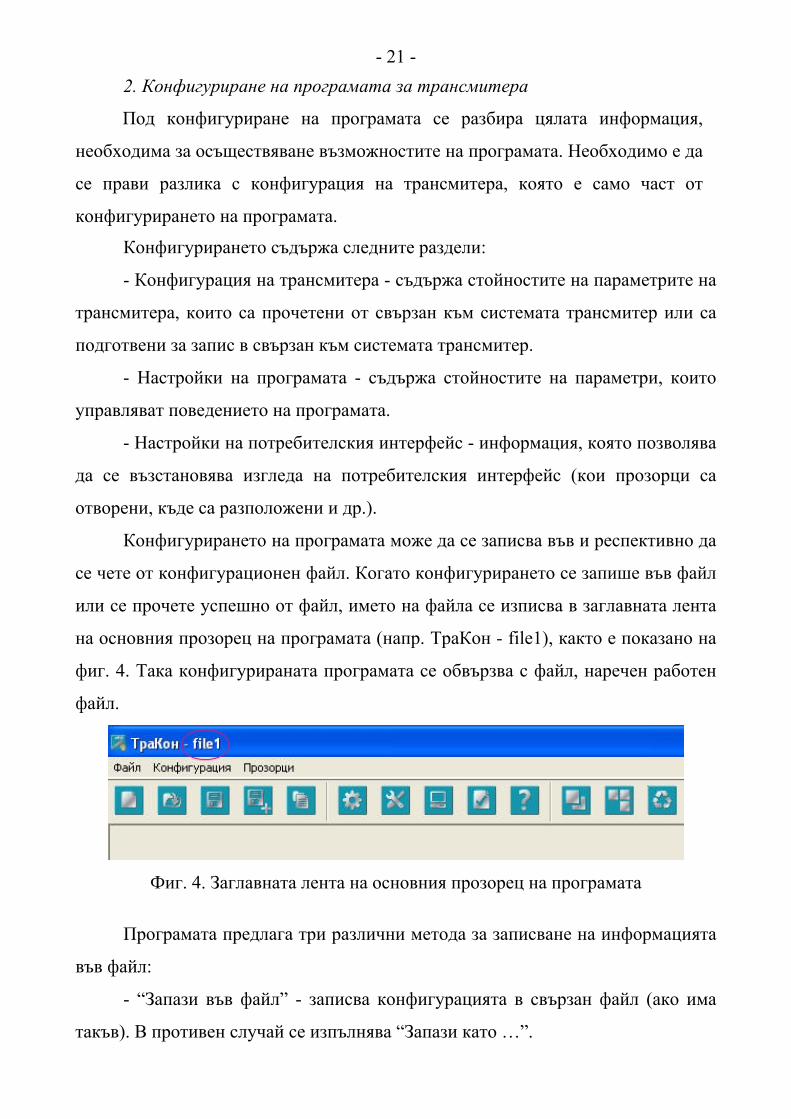
Конфигурирането на програмата може да се записва във и респективно да
се чете от конфигурационен файл. Когато конфигурирането се запише във файл
или се прочете успешно от файл, името на файла се изписва в заглавната лента
на основния прозорец на програмата (напр. ТраКон - file1), както е показано на
фиг. 4. Така конфигурираната програмата се обвързва с файл, наречен работен
файл.
Фиг. 4. Заглавната лента на основния прозорец на програмата
Програмата предлага три различни метода за записване на информацията
във файл:
- “Запази във файл” - записва конфигурацията в свързан файл (ако има
такъв). В противен случай се изпълнява “Запази като …”.
- 22 -- “Запази като …” - извежда се диалогов прозорец, където потребителя
избира файла, в който да се запише конфигурацията. Ако файлът съществува
програмата извежда съответно съобщение и потребителя има възможност да
прекъсне операцията. Конфигурацията се записва във файла и се свързва с него.
Ако до момента конфигурацията е била свързана с друг файл, последният
остава непроменен.
- “Запази копие …” - действа като “Запази като …”, с тази разлика, че
записаната конфигурация не се свързва с файла. Така свързването на
конфигурацията с файл не се променя.
Основното предназначение на програмата е да комуникира с
трансмитери, свързани към системата.
Програмата използва избран комуникационен порт за провеждане на
комуникацията. Избраният комуникационния порт се показва в дясната част от
линията на състоянието на основния прозорец на програмата. Неговата смяна
може да се направи от меню “Конфигурация/Комуникационен порт” или от
прозорец “Настройка”. И в двата случая на потребителя се предоставя да избере
от списък, включващ всички свободни в момента комуникационни портове. В
някои случаи, претърсването за свободни комуникационни портове може да
доведе до осезаемо закъснение на отварянето на списъка.
Нормално комуникационният порт е освободен. Той се заема само за
периода от време, когато е инициирана комуникация. Това позволява комуни-
кационния порт да се ползва от друга програма, дори от друго копие на програ-
мата, без да се затваря програмата.
За осъществяване на комуникацията е необходимо трансмитерът да е
свързан към съответния комуникационен порт посредством правилно избран
кабел. Трансмитерите могат да осъществят комуникация като използват за
захранване, само комуникационния кабел. За останалите е задължително да
бъдат захранени преди да се инициира комуникация с тях. Във всички случаи
обаче, е препоръчително трансмитерът да бъде захранен.
Възможни са следните видове комуникационни процеси:
- 23 -- Четене на конфигурация от трансмитера;
- Запис на конфигурация в трансмитера;
- Установяване на аналоговия изход (ръчен режим);
- Калибровка на изхода на трансмитера;
- Инициализация на трансмитера - трансмитерът има функционалност да
инициализра всички параметри с фабрично определени стойности. Трябва да се
внимава с използването на тази функционалност, тъй като се загубват
стойностите на параметрите, определящи калибровката на аналоговия изход.
- Четене на калибровъчните параметри от трансмитера;
- Запис на калибровъчните параметри в трансмитера;
- Четене стойността на контролираната величина.
Потребителският интерфейс може да инициира няколко комуникационни
процеса едновременно или докато не е приключил текущия. В тези случаи
процесите се изпълняват последователно по вътрешно определен приоритет,
образувайки комуникационна сесия. Тази функционалност осигурява на
потребителя възможност да инициира комуникационни процеси без да следи за
приключването на текущия. Това особено важи за случая на активирана
визуализация, когато потребителя може да чете и записва конфигурацията на
трансмитера, да калибрира трансмитера и др. без да прекъсва визуализацията.
Цялата комуникация се извършва във фонов режим, така че комуникацията не
влияе на потребителския интерфейс.
Потребителският интерфейс служи за достъп до конфигурацията на про-
грамата и предоставя възможност за нейното манипулиране. В някои случаи
информацията, която се показва от потребителския интерфейс може да се
различава от конфигурацията на програмата. Потребителския интерфейс е
преведен на няколко езика и потребителят може да избира работния език.
Потребителския интерфейс е разделен в пет прозореца:
- главен прозорец
Програмата ТраКон 2.0 е реализирана като стандартно Windows MDI
(multiple document interface) приложение.
- 24 -
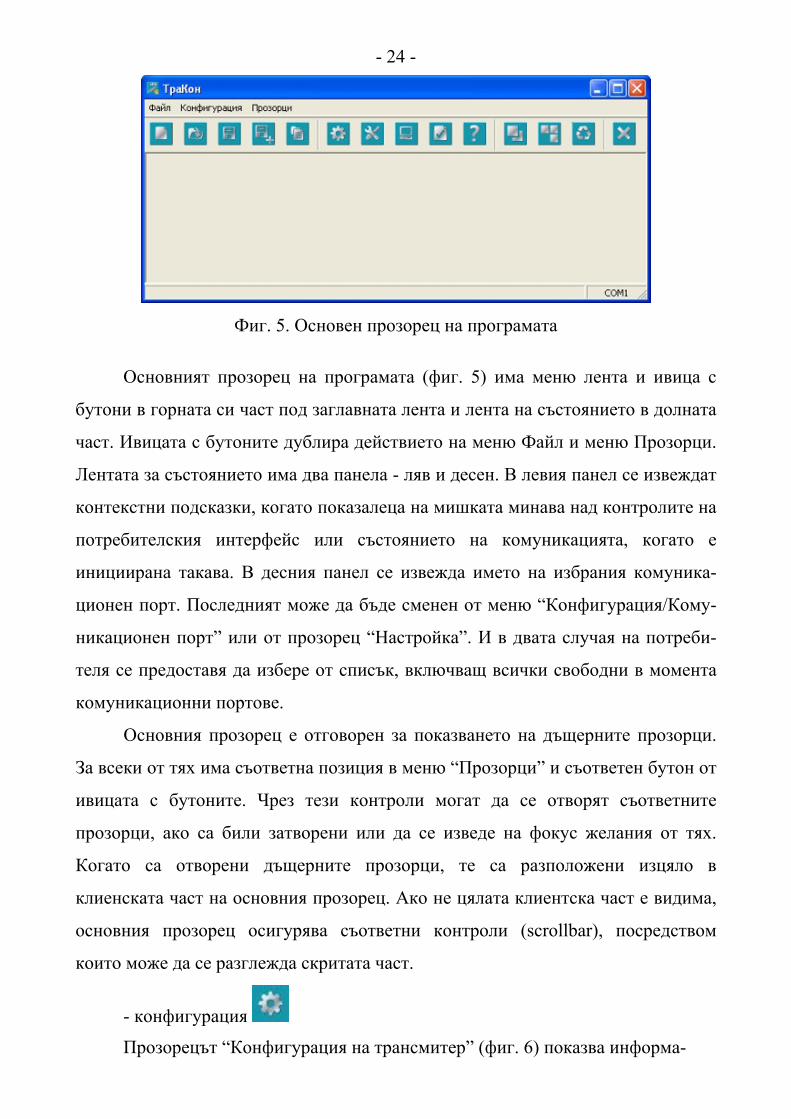
Фиг. 5. Основен прозорец на програмата
Основният прозорец на програмата (фиг. 5) има меню лента и ивица с
бутони в горната си част под заглавната лента и лента на състоянието в долната
част. Ивицата с бутоните дублира действието на меню Файл и меню Прозорци.
Лентата за състоянието има два панела - ляв и десен. В левия панел се извеждат
контекстни подсказки, когато показалеца на мишката минава над контролите на
потребителския интерфейс или състоянието на комуникацията, когато е
инициирана такава. В десния панел се извежда името на избрания комуника-
ционен порт. Последният може да бъде сменен от меню “Конфигурация/Кому-
никационен порт” или от прозорец “Настройка”. И в двата случая на потреби-
теля се предоставя да избере от списък, включващ всички свободни в момента
комуникационни портове.
Основния прозорец е отговорен за показването на дъщерните прозорци.
За всеки от тях има съответна позиция в меню “Прозорци” и съответен бутон от
ивицата с бутоните. Чрез тези контроли могат да се отворят съответните
прозорци, ако са били затворени или да се изведе на фокус желания от тях.
Когато са отворени дъщерните прозорци, те са разположени изцяло в
клиенската част на основния прозорец. Ако не цялата клиентска част е видима,
основния прозорец осигурява съответни контроли (scrollbar), посредством
които може да се разглежда скритата част.
- конфигурация
Прозорецът “Конфигурация на трансмитер” (фиг. 6) показва информа-
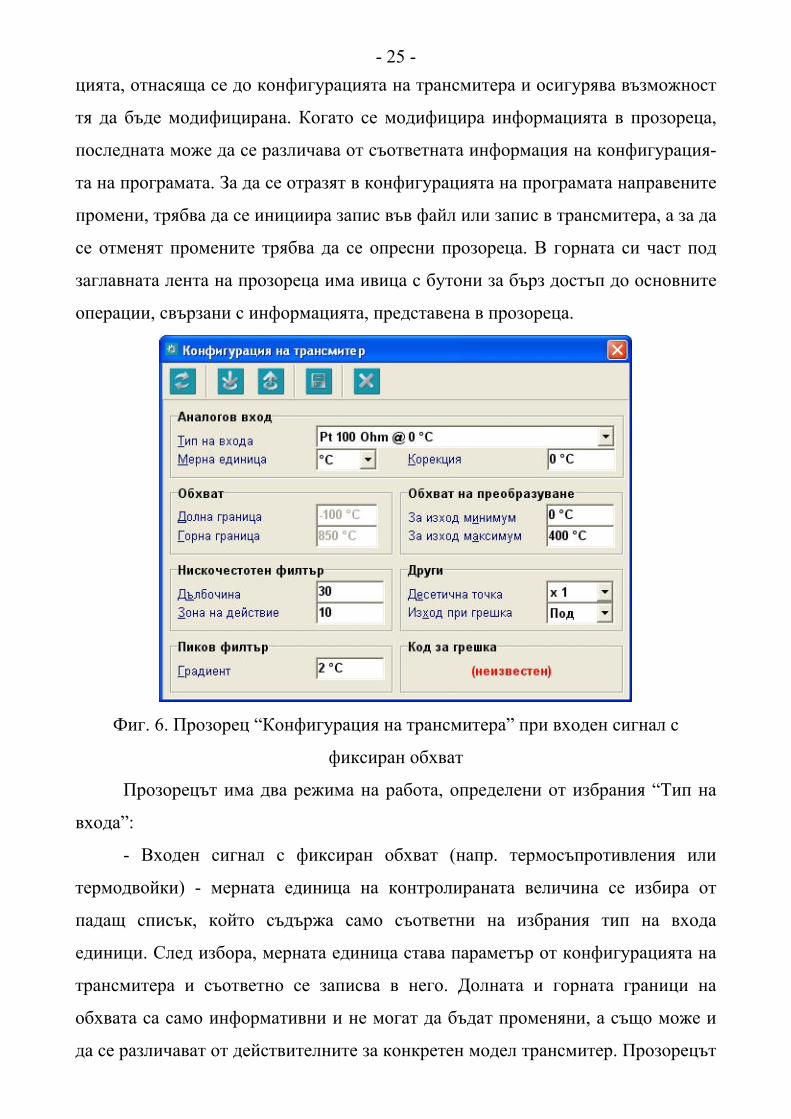
- 25 -цията, отнасяща се до конфигурацията на трансмитера и осигурява възможност
тя да бъде модифицирана. Когато се модифицира информацията в прозореца,
последната може да се различава от съответната информация на конфигурация-
та на програмата. За да се отразят в конфигурацията на програмата направените
промени, трябва да се инициира запис във файл или запис в трансмитера, а за да
се отменят промените трябва да се опресни прозореца. В горната си част под
заглавната лента на прозореца има ивица с бутони за бърз достъп до основните
операции, свързани с информацията, представена в прозореца.
Фиг. 6. Прозорец “Конфигурация на трансмитера” при входен сигнал с
фиксиран обхват
Прозорецът има два режима на работа, определени от избрания “Тип на
входа”:
- Входен сигнал с фиксиран обхват (напр. термосъпротивления или
термодвойки) - мерната единица на контролираната величина се избира от
падащ списък, който съдържа само съответни на избрания тип на входа
единици. След избора, мерната единица става параметър от конфигурацията на
трансмитера и съответно се записва в него. Долната и горната граници на
обхвата са само информативни и не могат да бъдат променяни, а също може и
да се различават от действителните за конкретен модел трансмитер. Прозорецът
- 26 -“Конфигурация на трансмитера” при входен сигнал с фиксиран обхват е
показан на фиг. 6.
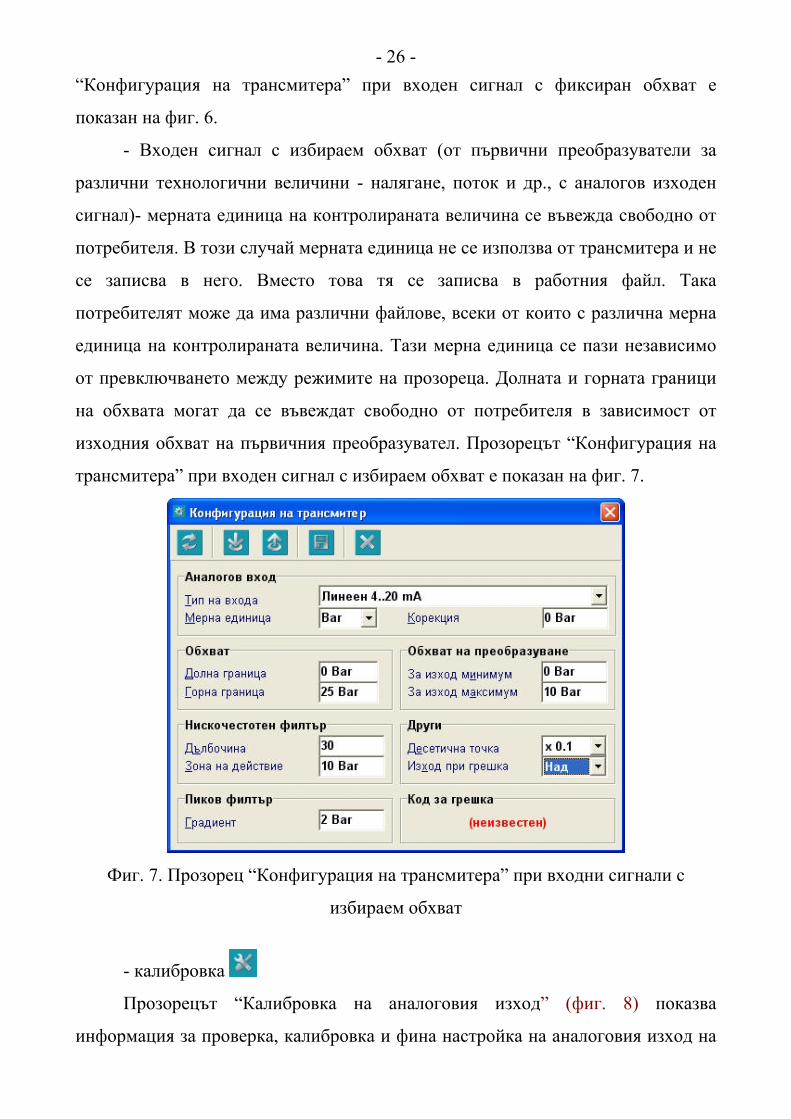
- Входен сигнал с избираем обхват (от първични преобразуватели за
различни технологични величини - налягане, поток и др., с аналогов изходен
сигнал)- мерната единица на контролираната величина се въвежда свободно от
потребителя. В този случай мерната единица не се използва от трансмитера и не
се записва в него. Вместо това тя се записва в работния файл. Така
потребителят може да има различни файлове, всеки от които с различна мерна
единица на контролираната величина. Тази мерна единица се пази независимо
от превключването между режимите на прозореца. Долната и горната граници
на обхвата могат да се въвеждат свободно от потребителя в зависимост от
изходния обхват на първичния преобразувател. Прозорецът “Конфигурация на
трансмитера” при входен сигнал с избираем обхват е показан на фиг. 7.
Фиг. 7. Прозорец “Конфигурация на трансмитера” при входни сигнали с
избираем обхват
- калибровка
Прозорецът “Калибровка на аналоговия изход” (фиг. 8) показва
информация за проверка, калибровка и фина настройка на аналоговия изход на
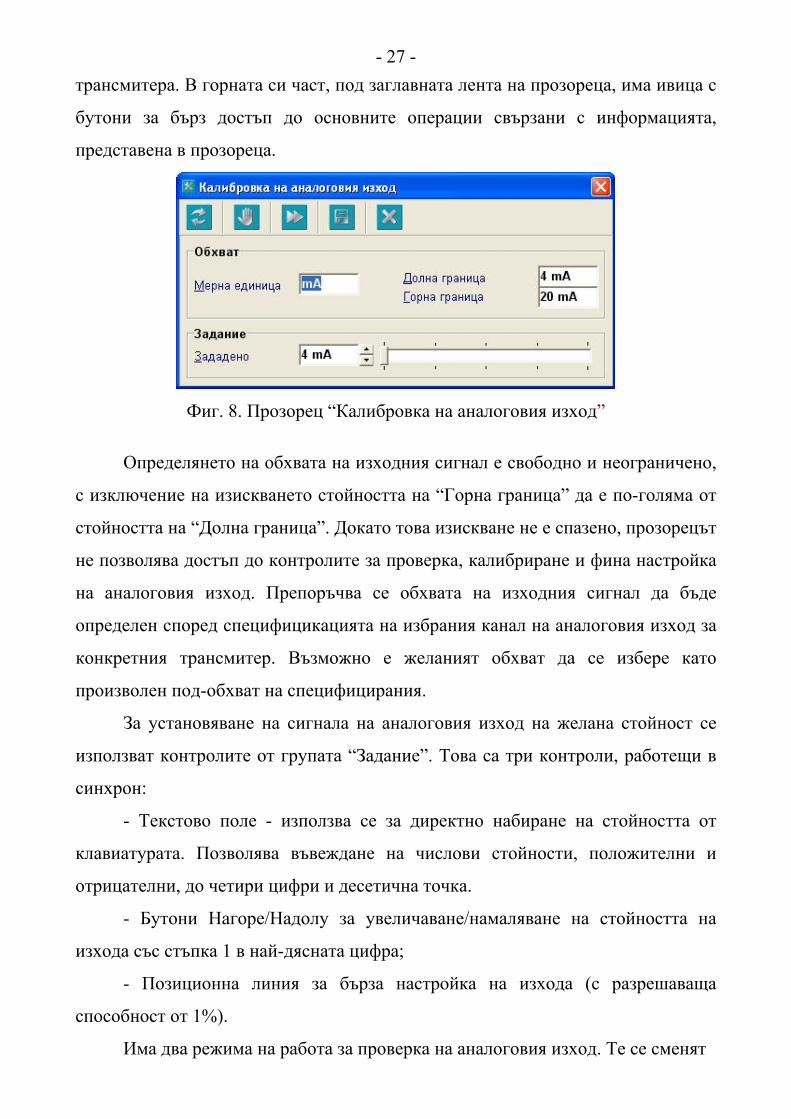
- 27 -трансмитера. В горната си част, под заглавната лента на прозореца, има ивица с
бутони за бърз достъп до основните операции свързани с информацията,
представена в прозореца.
Фиг. 8. Прозорец “Калибровка на аналоговия изход”
Определянето на обхвата на изходния сигнал е свободно и неограничено,
с изключение на изискването стойността на “Горна граница” да е по-голяма от
стойността на “Долна граница”. Докато това изискване не е спазено, прозорецът
не позволява достъп до контролите за проверка, калибриране и фина настройка
на аналоговия изход. Препоръчва се обхвата на изходния сигнал да бъде
определен според специфицикацията на избрания канал на аналоговия изход за
конкретния трансмитер. Възможно е желаният обхват да се избере като
произволен под-обхват на специфицирания.
За установяване на сигнала на аналоговия изход на желана стойност се
използват контролите от групата “Задание”. Това са три контроли, работещи в
синхрон:
- Текстово поле - използва се за директно набиране на стойността от
клавиатурата. Позволява въвеждане на числови стойности, положителни и
отрицателни, до четири цифри и десетична точка.
- Бутони Нагоре/Надолу за увеличаване/намаляване на стойността на
изхода със стъпка 1 в най-дясната цифра;
- Позиционна линия за бърза настройка на изхода (с разрешаваща
способност от 1%).
Има два режима на работа за проверка на аналоговия изход. Те се сменят
- 28 -от бутон “Режим Burst” от ивицата с бутони на прозореца:
- Ако “Режим Burst” не е натиснат, избраната стойност на изхода ще се
изпрати към трансмитера с натискане на бутон “Установяване на изхода”;
- Ако “Режим Burst” е натиснат, текстовото поле не е достъпно и всяка
промяна на стойността на изхода с някоя от другите 2 контроли ще се изпраща
директно към трансмитера (без натискане на бутон “Установяване на изхода”).
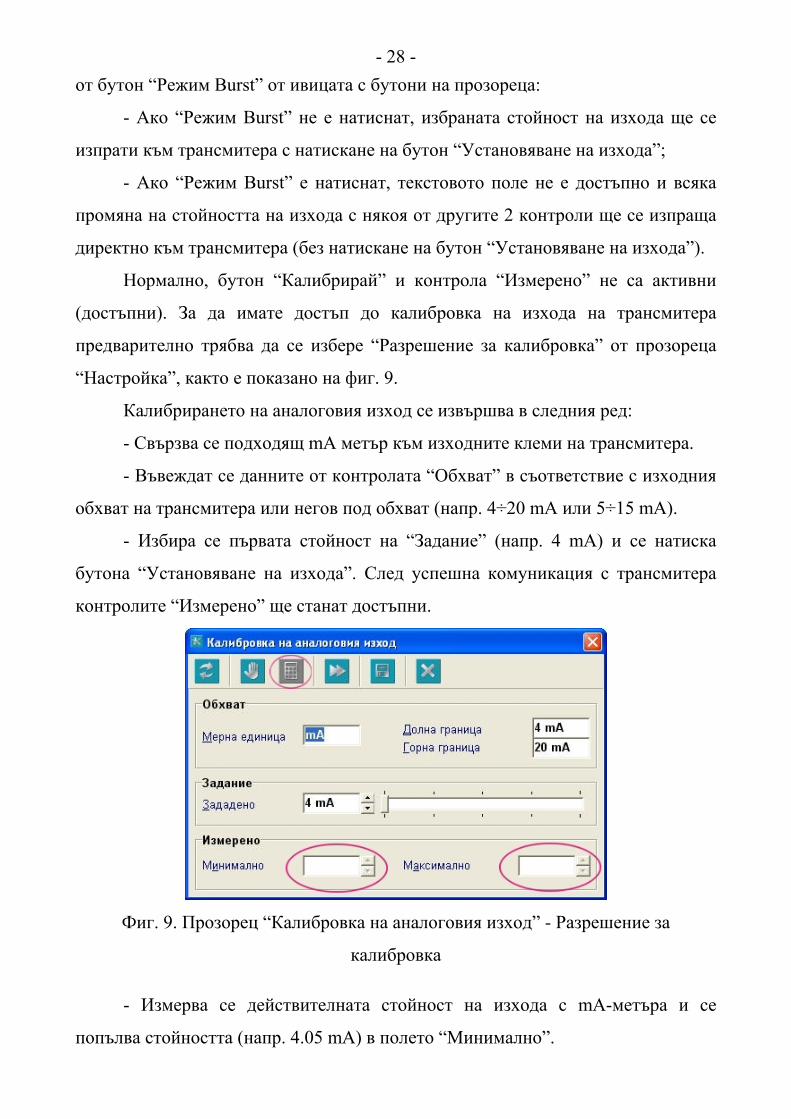
Нормално, бутон “Калибрирай” и контрола “Измерено” не са активни
(достъпни). За да имате достъп до калибровка на изхода на трансмитера
предварително трябва да се избере “Разрешение за калибровка” от прозореца
“Настройка”, както е показано на фиг. 9.
Калибрирането на аналоговия изход се извършва в следния ред:
- Свързва се подходящ mA метър към изходните клеми на трансмитера.
- Въвеждат се данните от контролата “Обхват” в съответствие с изходния
обхват на трансмитера или негов под обхват (напр. 4÷20 mA или 5÷15 mA).
- Избира се първата стойност на “Задание” (напр. 4 mA) и се натиска
бутона “Установяване на изхода”. След успешна комуникация с трансмитера
контролите “Измерено” ще станат достъпни.
Фиг. 9. Прозорец “Калибровка на аналоговия изход” - Разрешение за
калибровка
- Измерва се действителната стойност на изхода с mA-метъра и се
попълва стойността (напр. 4.05 mA) в полето “Минимално”.
- 29 -- Избира се втората стойност на “Задание” (напр. 20 mA) и се натиска
бутона “Установяване на изхода”.
- Измерва се действителната стойност на изхода и се попълва стойността
(напр. 19.08 mA) в полето “Максимално”.
- След като бутонът 'Калибрирай' стане активен, се калибрира изхода на
трансмитера. При сполучлива калибровка бутонът 'Калибрирай' отново се
деактивира.
- В случай, че измерените стойности се отклоняват много малко от
желаните, при изпълнение на калибровката е възможно да се появи съобщение
“Калибровката не може да бъде осъществена точно”. В тези случаи, ако е
необходимо по-точно калибриране на аналоговия изход, трябва да се използва
възможността за “Фина настройка” на аналоговия изход.
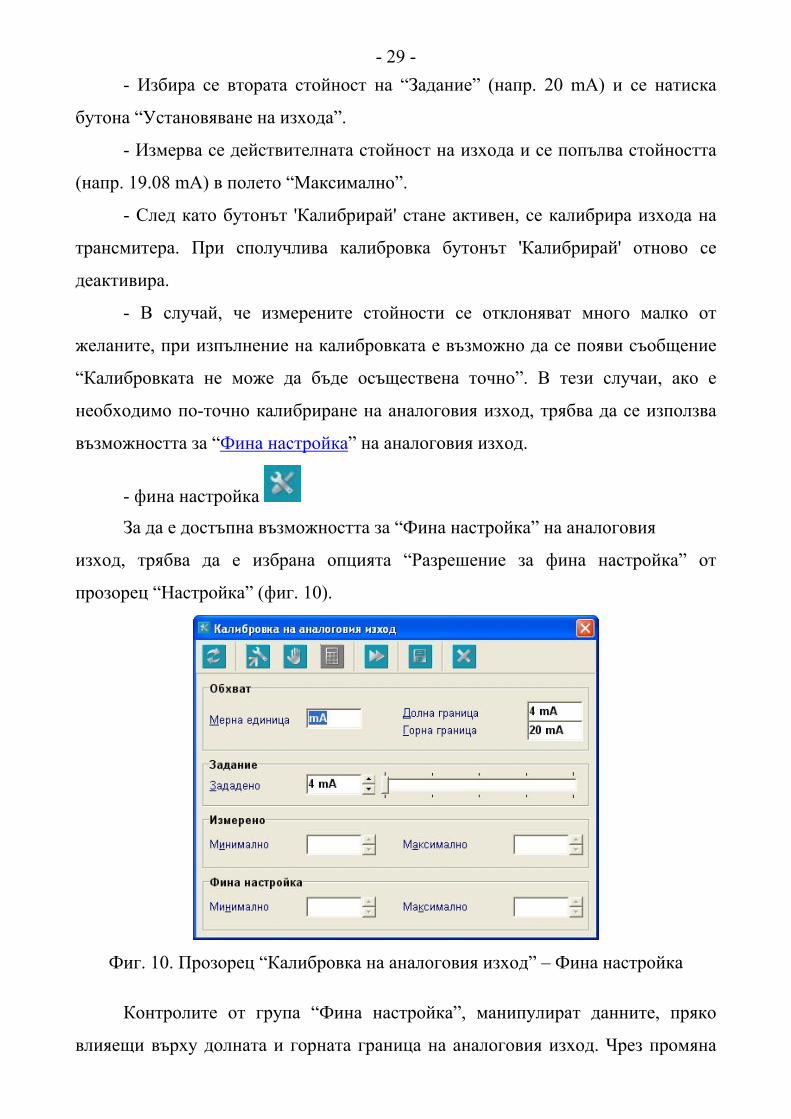
- фина настройка
За да е достъпна възможността за “Фина настройка” на аналоговия
изход, трябва да е избрана опцията “Разрешение за фина настройка” от
прозорец “Настройка” (фиг. 10).
Фиг. 10. Прозорец “Калибровка на аналоговия изход” – Фина настройка
Контролите от група “Фина настройка”, манипулират данните, пряко
влияещи върху долната и горната граница на аналоговия изход. Чрез промяна
- 30 -на стойността на “Минимално” се влияе върху долната граница на аналоговия
изход, а чрез промяна на стойността на “Максимално” - върху горната.
Ако тези полета са празни, чрез бутон “Зарежда калибровъчните
параметри” се инициира комуникация с трансмитера, за да се прочетат
съответните стойности. Тези стойности се изпращат към трансмитера само след
натискане на съответните бутони за промяна на стойността.
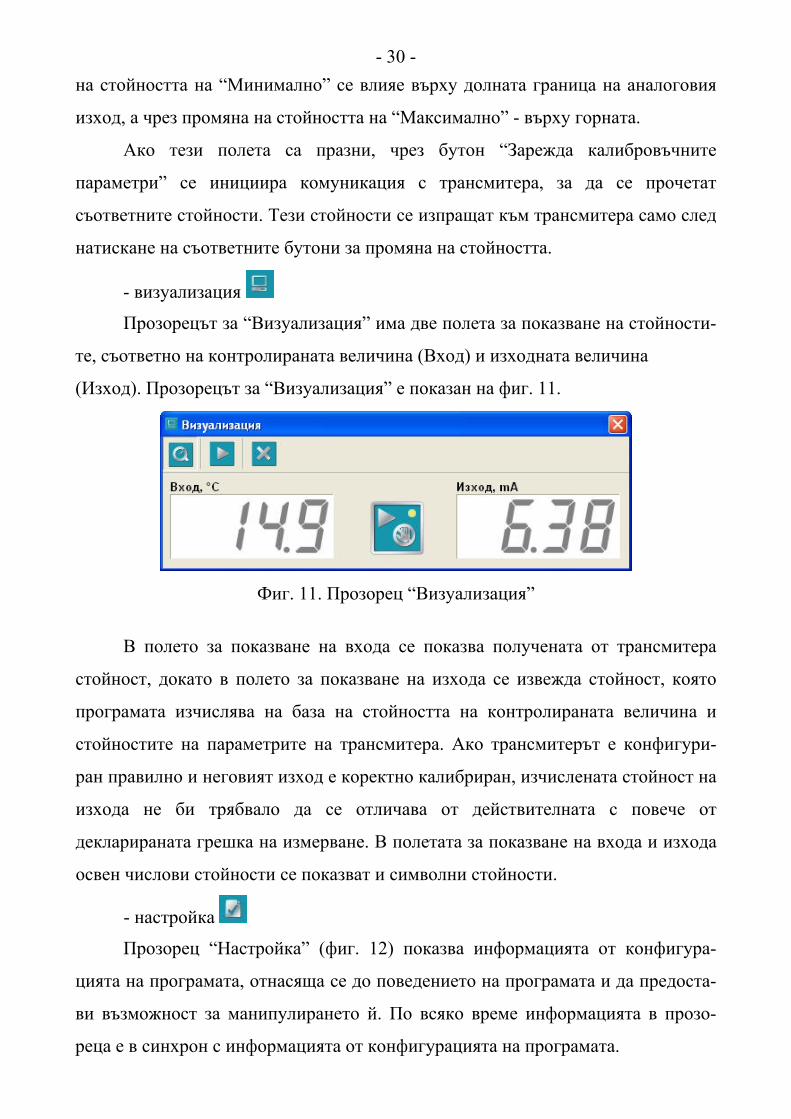
- визуализация
Прозорецът за “Визуализация” има две полета за показване на стойности-
те, съответно на контролираната величина (Вход) и изходната величина
(Изход). Прозорецът за “Визуализация” е показан на фиг. 11.
Фиг. 11. Прозорец “Визуализация”
В полето за показване на входа се показва получената от трансмитера
стойност, докато в полето за показване на изхода се извежда стойност, която
програмата изчислява на база на стойността на контролираната величина и
стойностите на параметрите на трансмитера. Ако трансмитерът е конфигури-
ран правилно и неговият изход е коректно калибриран, изчислената стойност на
изхода не би трябвало да се отличава от действителната с повече от
декларираната грешка на измерване. В полетата за показване на входа и изхода
освен числови стойности се показват и символни стойности.
- настройка
Прозорец “Настройка” (фиг. 12) показва информацията от конфигура-
цията на програмата, отнасяща се до поведението на програмата и да предоста-
ви възможност за манипулирането й. По всяко време информацията в прозо-
реца е в синхрон с информацията от конфигурацията на програмата.
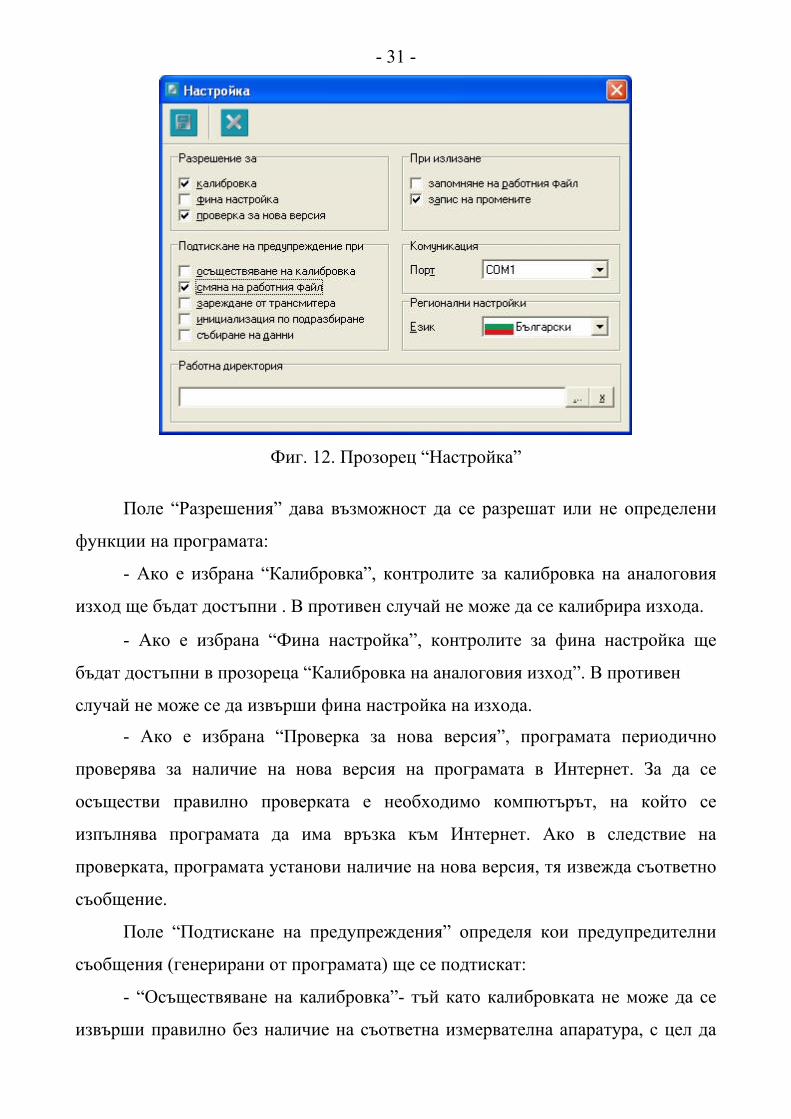
- 31 -
Фиг. 12. Прозорец “Настройка”
Поле “Разрешения” дава възможност да се разрешат или не определени
функции на програмата:
- Ако е избрана “Калибровка”, контролите за калибровка на аналоговия
изход ще бъдат достъпни . В противен случай не може да се калибрира изхода.
- Ако е избрана “Фина настройка”, контролите за фина настройка ще
бъдат достъпни в прозореца “Калибровка на аналоговия изход”. В противен
случай не може се да извърши фина настройка на изхода.
- Ако е избрана “Проверка за нова версия”, програмата периодично
проверява за наличие на нова версия на програмата в Интернет. За да се
осъществи правилно проверката е необходимо компютърът, на който се
изпълнява програмата да има връзка към Интернет. Ако в следствие на
проверката, програмата установи наличие на нова версия, тя извежда съответно
съобщение.
Поле “Подтискане на предупреждения” определя кои предупредителни
съобщения (генерирани от програмата) ще се подтискат:
- “Осъществяване на калибровка”- тъй като калибровката не може да се
извърши правилно без наличие на съответна измервателна апаратура, с цел да
- 32 -се избегне неволно повреждане на калибровъчните параметри на трансмитера е
предвидено програмата да извежда съобщение за потвърждаване на
осъществяването на калибровка преди самото осъществяване. Така
потребителят получава допълнителна възможност да предотврати калибровката
като отмени предварително дадената команда.
- “Смяна на работния файл”- когато конфигурацията е променена, при
опит за отваряне на файл програмата извежда съответно съобщение, за да
осигури на потребителя възможност да запише направените промените в
текущия файл преди да отвори новия.
- “зареждане от трансмитера”- когато конфигурацията е променена, при
опит за зареждане от трансмитер програмата извежда съответно съобщение, за
да осигури на потребителя възможност да запише направените промените в
текущия файл преди да зареди новите стойности от трансмитера.
- “Инициализация по подразбиране”- при опит за инициализация на
трансмитер програмата извежда съобщение за потвърждение на операцията, за
да се осигури възможност за отмяна. В случаите, когато конфигурацията е
променена, в съобщението се включва и възможността да се запише
направените промените в текущия файл преди да зареди новите стойности от
трансмитера.
- “Събиране на данни”- при тази функционалност (ако не е подтисната) не
се прекъсва процеса на събиране на данни (визуализация).
В противен случай процеса се прекъсва при първата извънредна ситуация.
- Запомняне при излизане - това поле определя какво ще се запомни при
изход от програмата. Ако е избрано “Запомняне на работния файл”, програмата
запомня кой е работния файл в момента на затварянето й и при следващото й
отваряне прочита конфигурацията си от същия файл. Ако е избран “Запис на
промените”, при излизане програмата записва всички промени в работния файл.
В противен случай, програмата извежда съобщение, ако конфигурацията е била
променена и се получава възможност за съхраняване направените промени в
работния файл.
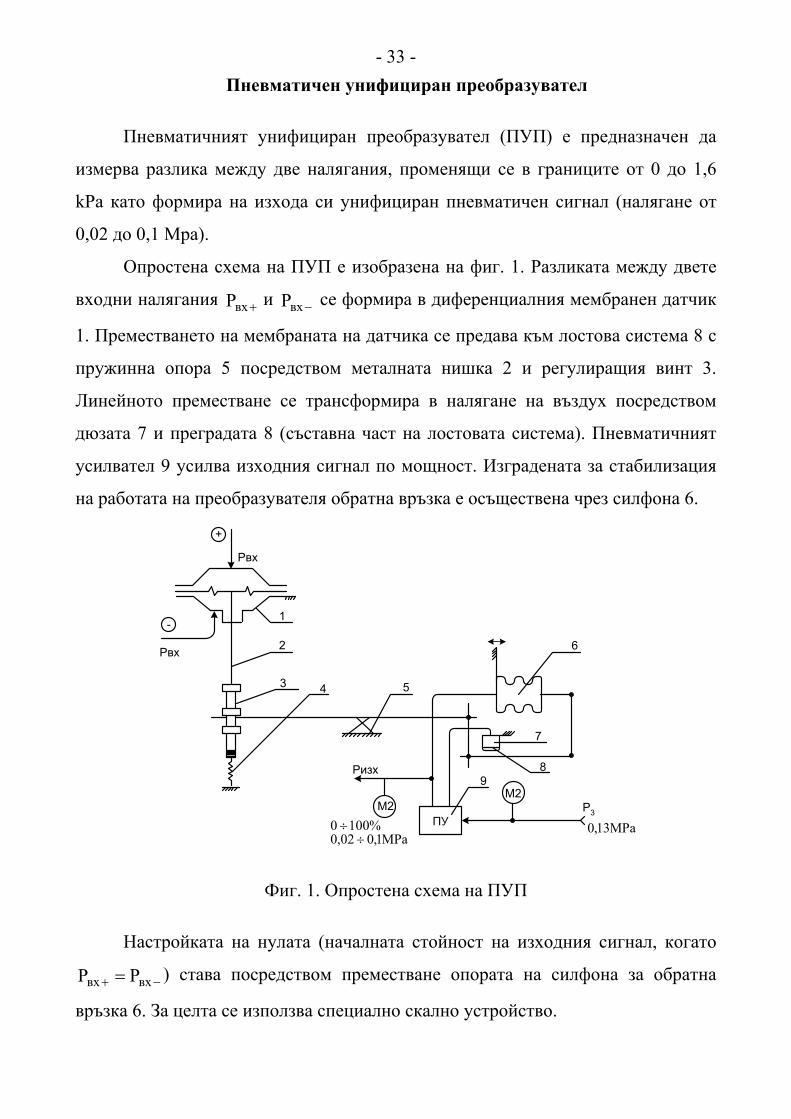
- 33 - Пневматичен унифициран преобразувател
Пневматичният унифициран преобразувател (ПУП) е предназначен да
измерва разлика между две налягания, променящи се в границите от 0 до 1,6
kPa като формира на изхода си унифициран пневматичен сигнал (налягане от
0,02 до 0,1 Mpa).
Опростена схема на ПУП е изобразена на фиг. 1. Разликата между двете
входни налягания +вхP и −вхP се формира в диференциалния мембранен датчик
1. Преместването на мембраната на датчика се предава към лостова система 8 с
пружинна опора 5 посредством металната нишка 2 и регулиращия винт 3.
Линейното преместване се трансформира в налягане на въздух посредством
дюзата 7 и преградата 8 (съставна част на лостовата система). Пневматичният
усилвател 9 усилва изходния сигнал по мощност. Изградената за стабилизация
на работата на преобразувателя обратна връзка е осъществена чрез силфона 6.
5
6
7
89
Pизх
М2М2
P3
MPa1,002,0%1000
÷÷ MPa13,0ПУ
+
-
Pвх
Pвх
1
2
3 4
Фиг. 1. Опростена схема на ПУП
Настройката на нулата (началната стойност на изходния сигнал, когато
−+ = вхвх PP ) става посредством преместване опората на силфона за обратна
връзка 6. За целта се използва специално скално устройство.
- 34 -Манометърът М1 показва захранващото налягане, а манометърът М2 –
изходния сигнал в % (от 0 до 100% при налягане от 0,02 до0,1 МРа).
Изискване към преобразувателите е статичната им характеристика да
бъде линейна. Статичната характеристика на преобразувателя представлява
зависимостта на изходния сигнал във функция от входния, т.е.
)P(fP вхизх = ,
където вхP представлява разликата между двете входни налягания
−+ −= вхвхвх PPP .
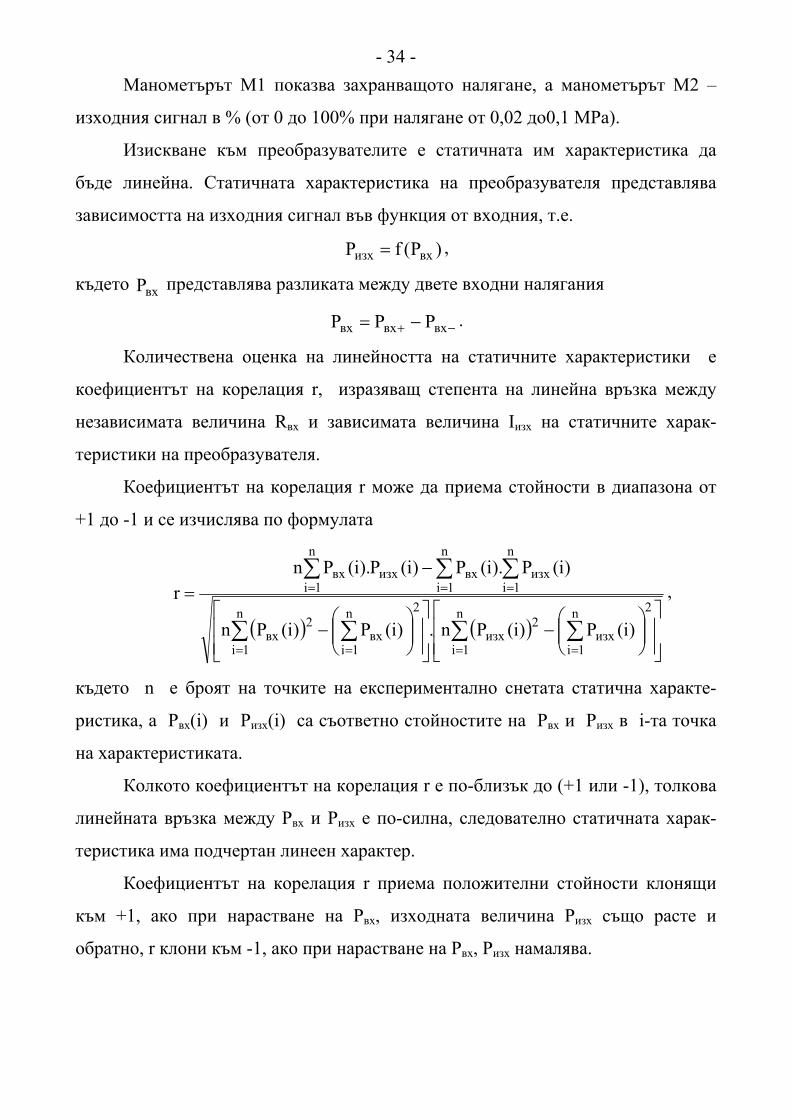
Количествена оценка на линейността на статичните характеристики е
коефициентът на корелация r, изразяващ степента на линейна връзка между
независимата величина Rвх и зависимата величина Iизх на статичните харак-
теристики на преобразувателя.
Коефициентът на корелация r може да приема стойности в диапазона от
+1 до -1 и се изчислява по формулата
( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=
∑ ∑∑ ∑
∑ ∑ ∑
= == =
= = =
n
1i
2n
1iизх
2изх
n
1i
2n
1iвх
2вх
n
1i
n
1i
n
1iизхвхизхвх
)i(P)i(Pn.)i(P)i(Pn
)i(P).i(P)i(P).i(Pnr ,
където n е броят на точките на експериментално снетата статична характе-
ристика, а Рвх(i) и Ризх(i) са съответно стойностите на Рвх и Ризх в i-та точка
на характеристиката.
Колкото коефициентът на корелация r е по-близък до (+1 или -1), толкова
линейната връзка между Рвх и Ризх е по-силна, следователно статичната харак-
теристика има подчертан линеен характер.
Коефициентът на корелация r приема положителни стойности клонящи
към +1, ако при нарастване на Рвх, изходната величина Ризх също расте и
обратно, r клони към -1, ако при нарастване на Рвх, Ризх намалява.
- 35 -
РЕГУЛАТОРИ
Обобщена блокова схема на регулатор. Класификация на регулаторите.
1. Обобщена блокова схема на регулатор
Чрез средствата за автоматичен контрол се осигурява необходимата
обективна информация както за текущото състояние на обекта, така и за исто-
рията на протичащите в него процеси. Предотвратяват се аварийни и нежелани
ситуации във функционирането на обекта, като едновременно се алармира за
тях. Натрупаната информация характеризира качеството на произвеждания
продукт и е основа за изработване на стратегия на ръководния и експлоата-
ционен персонал за по-нататъшни действия. Такъв подход предполага изграж-
дането на автоматизирани системи за управление. При тях човекът е непо-
средствен участник в процеса управление.
Ролята на човека в този процес се променя съществено при въвеждане на
автоматични регулатори. Този подход предполага изграждането на системи за
автоматично регулиране и управление. Тук обработката и използването на
информацията се възлага на автоматични устройства. Алгоритъмът на функ-
циониране на системите за автоматично регулиране и управление се определя
от вида на използвания регулатор и от неговите възможности.
На фиг. 1 е изобразена блокова схема на регулатор, която илюстрира ос-
новните му елементи и режими на работа, както и мястото му в системата за
автоматично регулиране.
В обекта на регулиране ОР протича контролирания процес. За качеството
на процеса се съди по стойността на регулируемата величина х. Тази величина
се измерва от датчика Д. Чрез дистанционна система показанията на датчика
могат да бъдат предадени към вторичен уред ВУ. Материал или енергия към
обекта постъпва от източника И през регулиращия орган РО. Законът на
регулиране се формира от регулатора Р, който от своя страна се състои от
редица блокове.
- 36 -
μ
yre −=ν
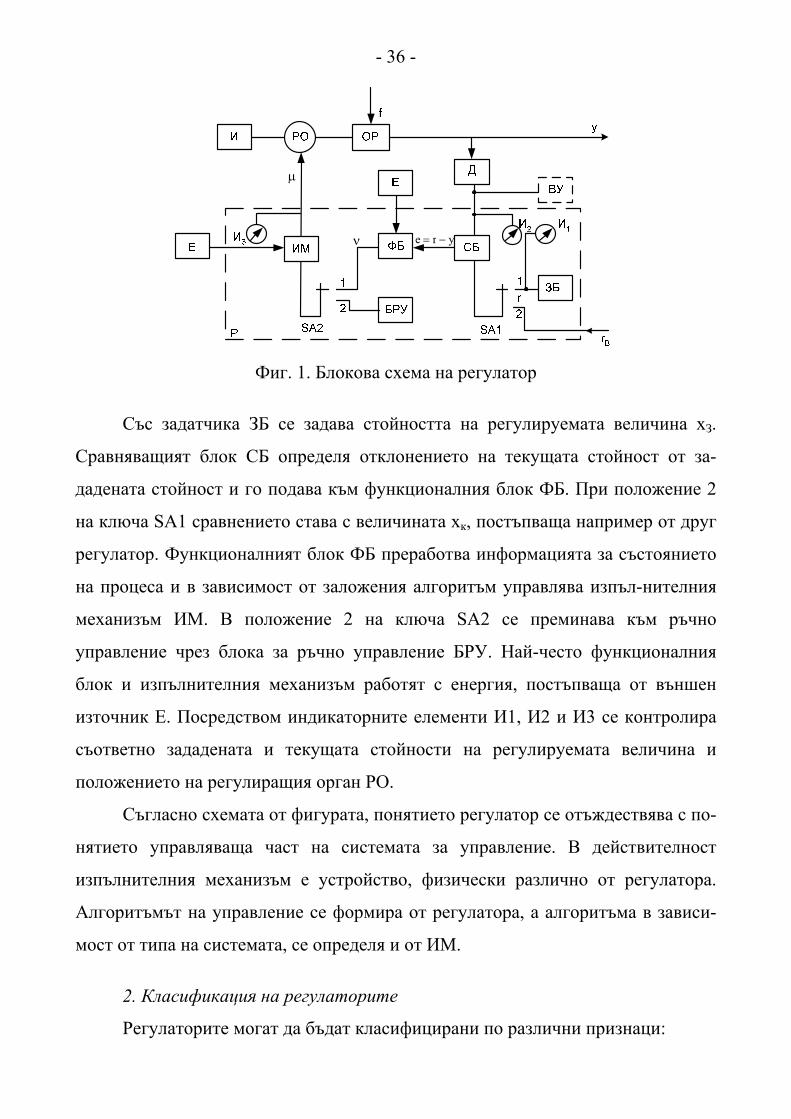
Фиг. 1. Блокова схема на регулатор
Със задатчика ЗБ се задава стойността на регулируемата величина хЗ.
Сравняващият блок СБ определя отклонението на текущата стойност от за-
дадената стойност и го подава към функционалния блок ФБ. При положение 2
на ключа SA1 сравнението става с величината хк, постъпваща например от друг
регулатор. Функционалният блок ФБ преработва информацията за състоянието
на процеса и в зависимост от заложения алгоритъм управлява изпъл-нителния
механизъм ИМ. В положение 2 на ключа SA2 се преминава към ръчно
управление чрез блока за ръчно управление БРУ. Най-често функционалния
блок и изпълнителния механизъм работят с енергия, постъпваща от външен
източник Е. Посредством индикаторните елементи И1, И2 и И3 се контролира
съответно зададената и текущата стойности на регулируемата величина и
положението на регулиращия орган РО.
Съгласно схемата от фигурата, понятието регулатор се отъждествява с по-
нятието управляваща част на системата за управление. В действителност
изпълнителния механизъм е устройство, физически различно от регулатора.
Алгоритъмът на управление се формира от регулатора, а алгоритъма в зависи-
мост от типа на системата, се определя и от ИМ.
2. Класификация на регулаторите
Регулаторите могат да бъдат класифицирани по различни признаци:
- 37 - - по вида на спомагателната енергия
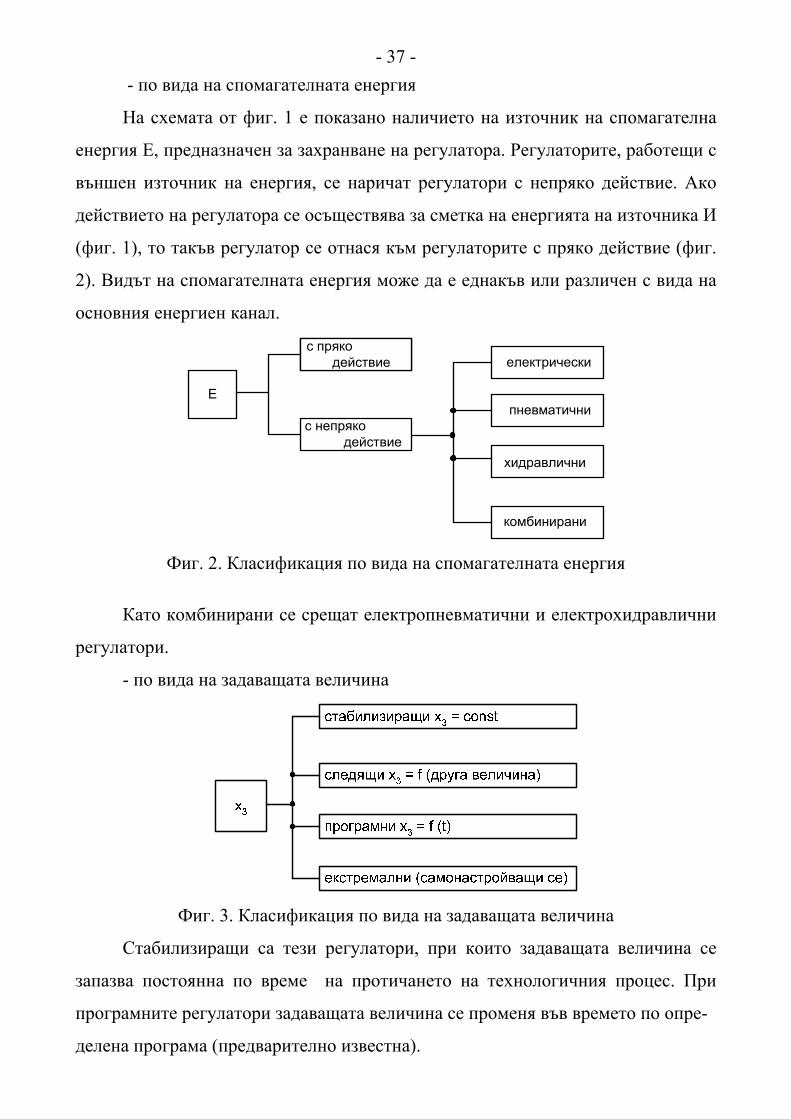
На схемата от фиг. 1 е показано наличието на източник на спомагателна
енергия Е, предназначен за захранване на регулатора. Регулаторите, работещи с
външен източник на енергия, се наричат регулатори с непряко действие. Ако
действието на регулатора се осъществява за сметка на енергията на източника И
(фиг. 1), то такъв регулатор се отнася към регулаторите с пряко действие (фиг.
2). Видът на спомагателната енергия може да е еднакъв или различен с вида на
основния енергиен канал.
електрически
пневматични
хидравлични
комбинирани
Е
с пряко действие
с непряко действие
Фиг. 2. Класификация по вида на спомагателната енергия
Като комбинирани се срещат електропневматични и електрохидравлични
регулатори.
- по вида на задаващата величина
Фиг. 3. Класификация по вида на задаващата величина
Стабилизиращи са тези регулатори, при които задаващата величина се
запазва постоянна по време на протичането на технологичния процес. При
програмните регулатори задаващата величина се променя във времето по опре-
делена програма (предварително известна).
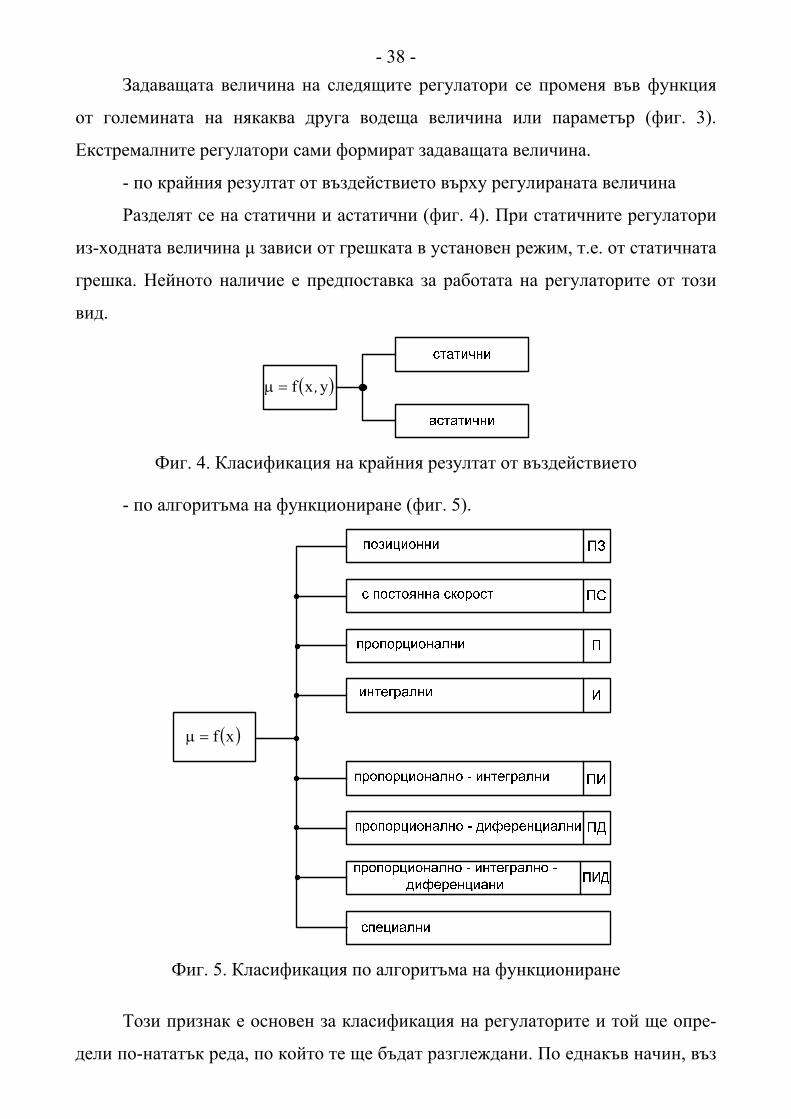
- 38 -Задаващата величина на следящите регулатори се променя във функция
от големината на някаква друга водеща величина или параметър (фиг. 3).
Екстремалните регулатори сами формират задаващата величина.
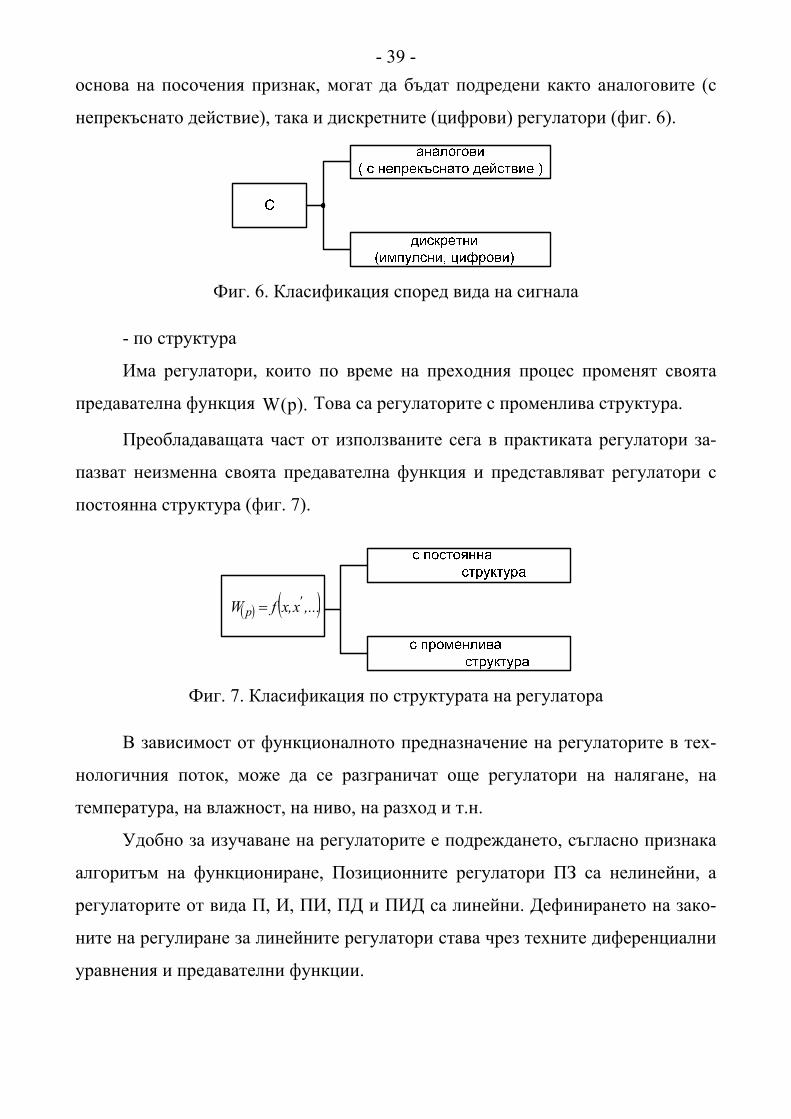
- по крайния резултат от въздействието върху регулираната величина
Разделят се на статични и астатични (фиг. 4). При статичните регулатори
из-ходната величина μ зависи от грешката в установен режим, т.е. от статичната
грешка. Нейното наличие е предпоставка за работата на регулаторите от този
вид.
( )yxf ,=μ
Фиг. 4. Класификация на крайния резултат от въздействието
- по алгоритъма на функциониране (фиг. 5).
( )xf=μ
Фиг. 5. Класификация по алгоритъма на функциониране
Този признак е основен за класификация на регулаторите и той ще опре-
дели по-нататък реда, по който те ще бъдат разглеждани. По еднакъв начин, въз
- 39 -основа на посочения признак, могат да бъдат подредени както аналоговите (с
непрекъснато действие), така и дискретните (цифрови) регулатори (фиг. 6).
Фиг. 6. Класификация според вида на сигнала
- по структура
Има регулатори, които по време на преходния процес променят своята
предавателна функция ).p(W Това са регулаторите с променлива структура.
Преобладаващата част от използваните сега в практиката регулатори за-
пазват неизменна своята предавателна функция и представляват регулатори с
постоянна структура (фиг. 7).
( ) ( ),...x,xfW 'p =
Фиг. 7. Класификация по структурата на регулатора
В зависимост от функционалното предназначение на регулаторите в тех-
нологичния поток, може да се разграничат още регулатори на налягане, на
температура, на влажност, на ниво, на разход и т.н.
Удобно за изучаване на регулаторите е подреждането, съгласно признака
алгоритъм на функциониране, Позиционните регулатори ПЗ са нелинейни, а
регулаторите от вида П, И, ПИ, ПД и ПИД са линейни. Дефинирането на зако-
ните на регулиране за линейните регулатори става чрез техните диференциални
уравнения и предавателни функции.
- 40 -Позиционни регулатори
Позиционните регулатори са нелинейни. При тях регулиращото въздей-
ствие не се променя плавно, а добива само определени стойности. Прието е тези
фиксирани стойности да се наричат позиции. Броят на позициите е ти-пична
характеристика за регулаторите от този вид и според това те биват дву-
позиционни, трипозициионни и т.н. Когато позициите са повече от три, регу-
латорите се наричат многопозиционни. Най-разпространени са дву- и трипо-
зиционните регулатори. Като правило позиционните регулатори съдържат в
структурата си релеен елемент.
При двупозиционните регулатори регулиращият орган приема само две
положения: включено и изключено. Ако положение “включено” съответства на
максимално ниво, то положение “изключено” може да съответства на нулево
ниво (най-често) или на друга стойност (по-голяма от нула и по-малка от
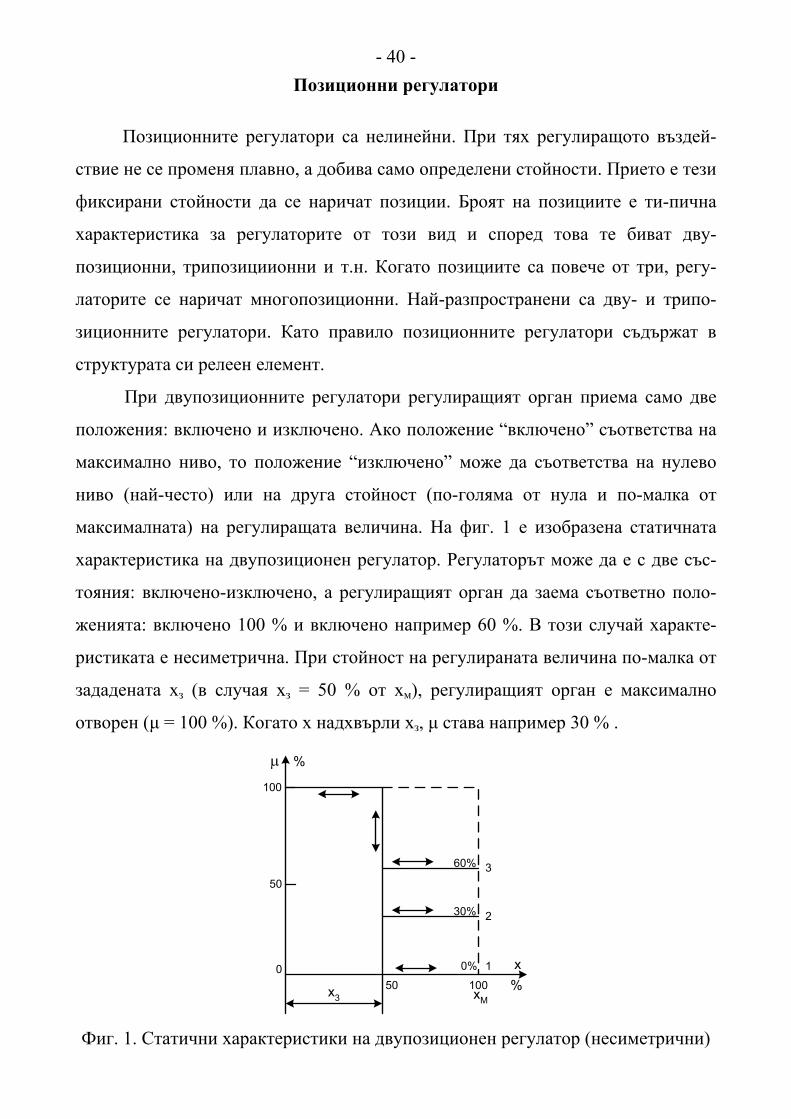
максималната) на регулиращата величина. На фиг. 1 е изобразена статичната
характеристика на двупозиционен регулатор. Регулаторът може да е с две със-
тояния: включено-изключено, а регулиращият орган да заема съответно поло-
женията: включено 100 % и включено например 60 %. В този случай характе-
ристиката е несиметрична. При стойност на регулираната величина по-малка от
зададената xз (в случая xз = 50 % от xм), регулиращият орган е максимално
отворен (μ = 100 %). Когато x надхвърли xз, μ става например 30 % .
50
0
100
μ %
%x0%
30%
60%
50 100xM
x3
1
2
3
Фиг. 1. Статични характеристики на двупозиционен регулатор (несиметрични)
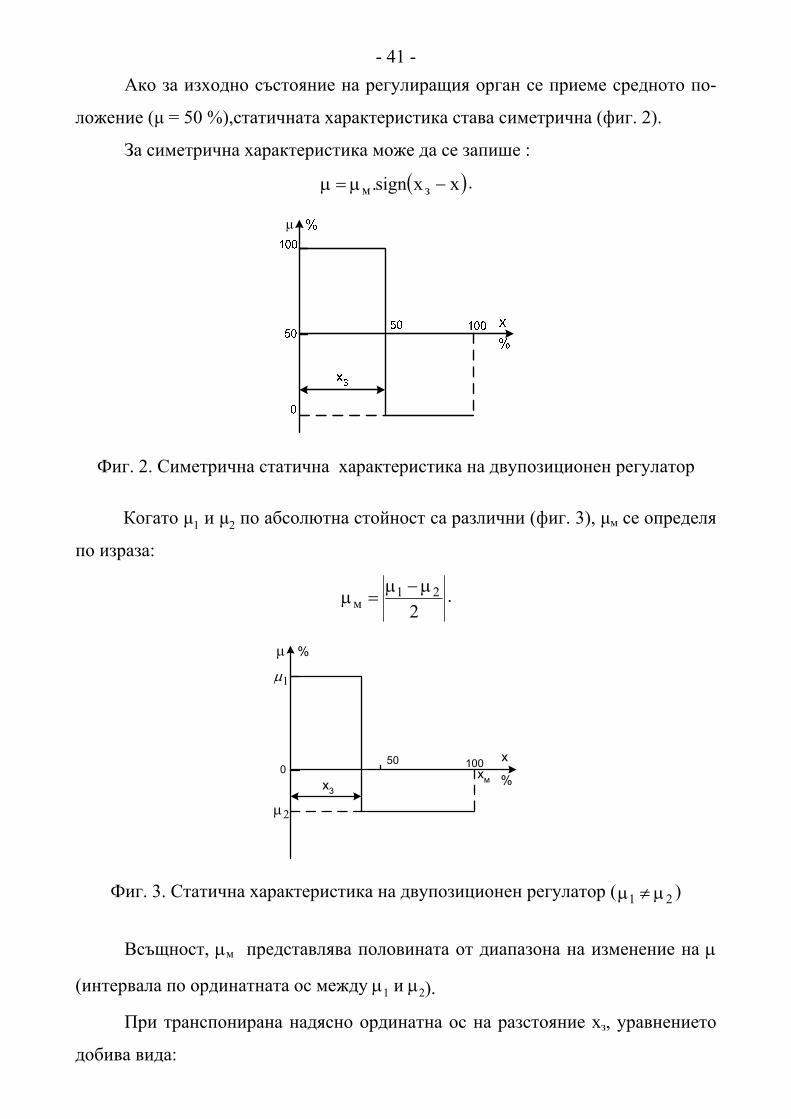
- 41 -Ако за изходно състояние на регулиращия орган се приеме средното по-
ложение (μ = 50 %),статичната характеристика става симетрична (фиг. 2).
За симетрична характеристика може да се запише :
( )xxsign. зм −μ=μ .
μ
Фиг. 2. Симетрична статична характеристика на двупозиционен регулатор
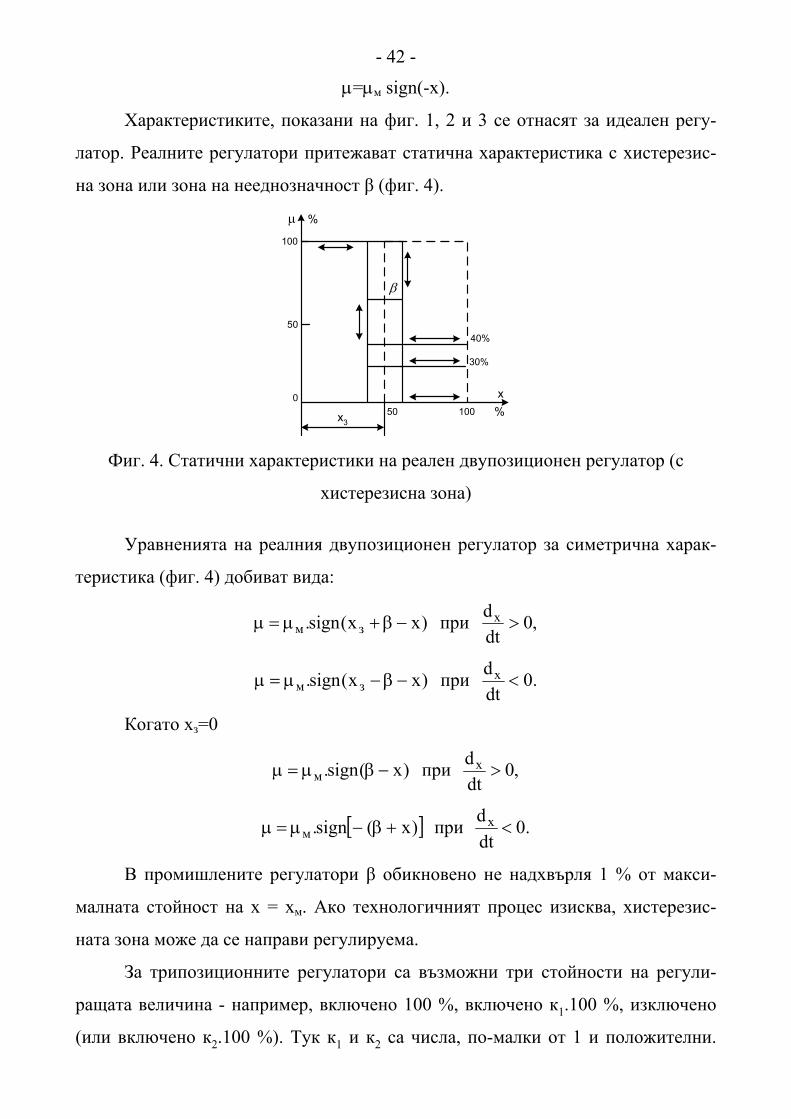
Когато μ1 и μ2 по абсолютна стойност са различни (фиг. 3), μм се определя
по израза:
221
мμ−μ
=μ .
0
μ %
%
x50 100
x3
xм
1μ
2μ
Фиг. 3. Статична характеристика на двупозиционен регулатор ( 21 μ≠μ )
Всъщност, μм представлява половината от диапазона на изменение на μ
(интервала по ординатната ос между μ1 и μ2).
При транспонирана надясно ординатна ос на разстояние xз, уравнението
добива вида:
- 42 -
μ=μм sign(-x).
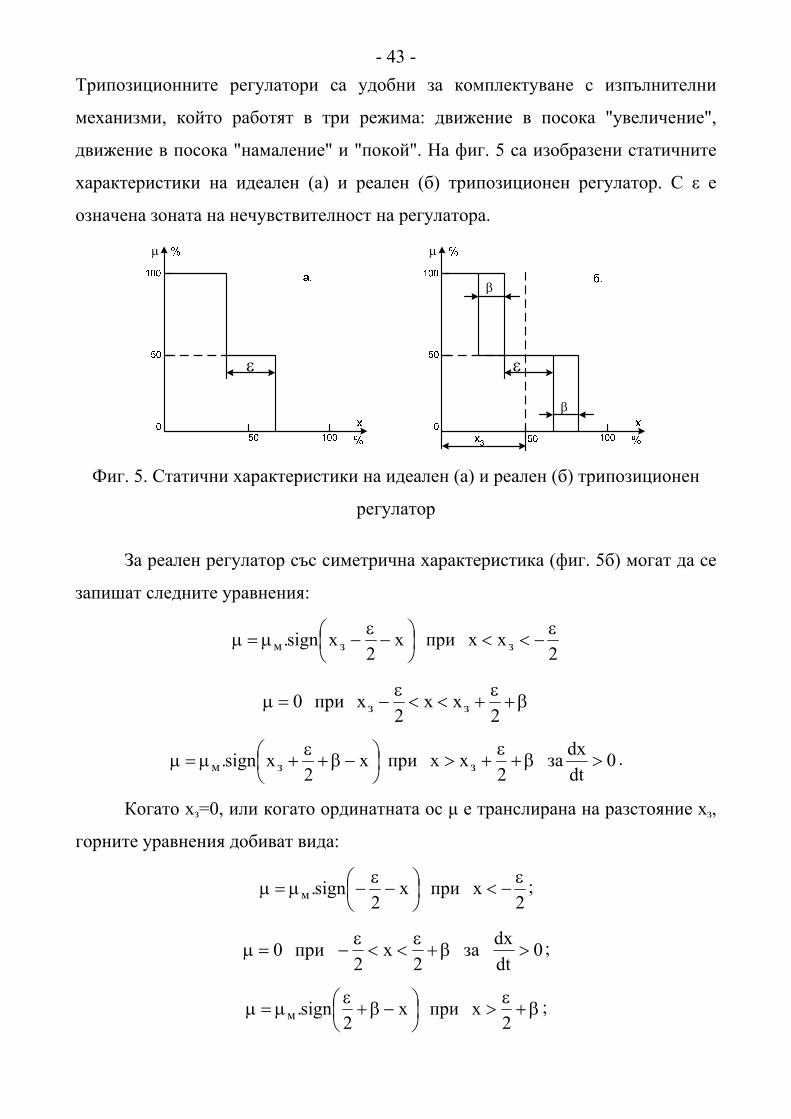
Характеристиките, показани на фиг. 1, 2 и 3 се отнасят за идеален регу-
латор. Реалните регулатори притежават статична характеристика с хистерезис-
на зона или зона на нееднозначност β (фиг. 4).
50
0
100
μ %
%x
30%
40%
50 100x3
β
Фиг. 4. Статични характеристики на реален двупозиционен регулатор (с
хистерезисна зона)
Уравненията на реалния двупозиционен регулатор за симетрична харак-
теристика (фиг. 4) добиват вида:
,0dtdпри)xx(sign. x
зм >−β+μ=μ
.0dtdпри)xx(sign. x
зм <−β−μ=μ
Когато xз=0
,0dtdпри)x(sign. x
м >−βμ=μ
[ ] .0dtdпри)x(sign. x
м <+β−μ=μ
В промишлените регулатори β обикновено не надхвърля 1 % от макси-
малната стойност на x = xм. Ако технологичният процес изисква, хистерезис-
ната зона може да се направи регулируема.
За трипозиционните регулатори са възможни три стойности на регули-
ращата величина - например, включено 100 %, включено к1.100 %, изключено
(или включено к2.100 %). Тук к1 и к2 са числа, по-малки от 1 и положителни.
- 43 -Трипозиционните регулатори са удобни за комплектуване с изпълнителни
механизми, който работят в три режима: движение в посока "увеличение",
движение в посока "намаление" и "покой". На фиг. 5 са изобразени статичните
характеристики на идеален (а) и реален (б) трипозиционен регулатор. С ε е
означена зоната на нечувствителност на регулатора.
μ
ε
μ
ε
β
β
Фиг. 5. Статични характеристики на идеален (а) и реален (б) трипозиционен
регулатор
За реален регулатор със симетрична характеристика (фиг. 5б) могат да се
запишат следните уравнения:
2ххприx
2xsign. ззм
ε−<<⎟
⎠⎞
⎜⎝⎛ −
ε−μ=μ
β+ε
+<<ε
−=μ2
хх2
хпри0 зз
⎟⎠⎞
⎜⎝⎛ −β+
ε+μ=μ x
2xsign. зм 0
dtdxза
2xxпри з >β+
ε+> .
Когато xз=0, или когато ординатната ос μ е транслирана на разстояние xз,
горните уравнения добиват вида:
2хприx
2sign.м
ε−<⎟
⎠⎞
⎜⎝⎛ −
ε−μ=μ ;
0dtdxза
2x
2при0 >β+
ε<<
ε−=μ ;
β+ε
>⎟⎠⎞
⎜⎝⎛ −β+ε
μ=μ2
xприx2
sign.м ;
- 44 -
2xприx
2sign.м
ε>⎟
⎠⎞
⎜⎝⎛ −ε
μ=μ ;
0dtdxза
2x
2при0 <
ε<<β−
ε−=μ ;
β−ε
−<⎟⎠⎞
⎜⎝⎛ −β−
ε−μ=μ
2xприx
2sign.м .
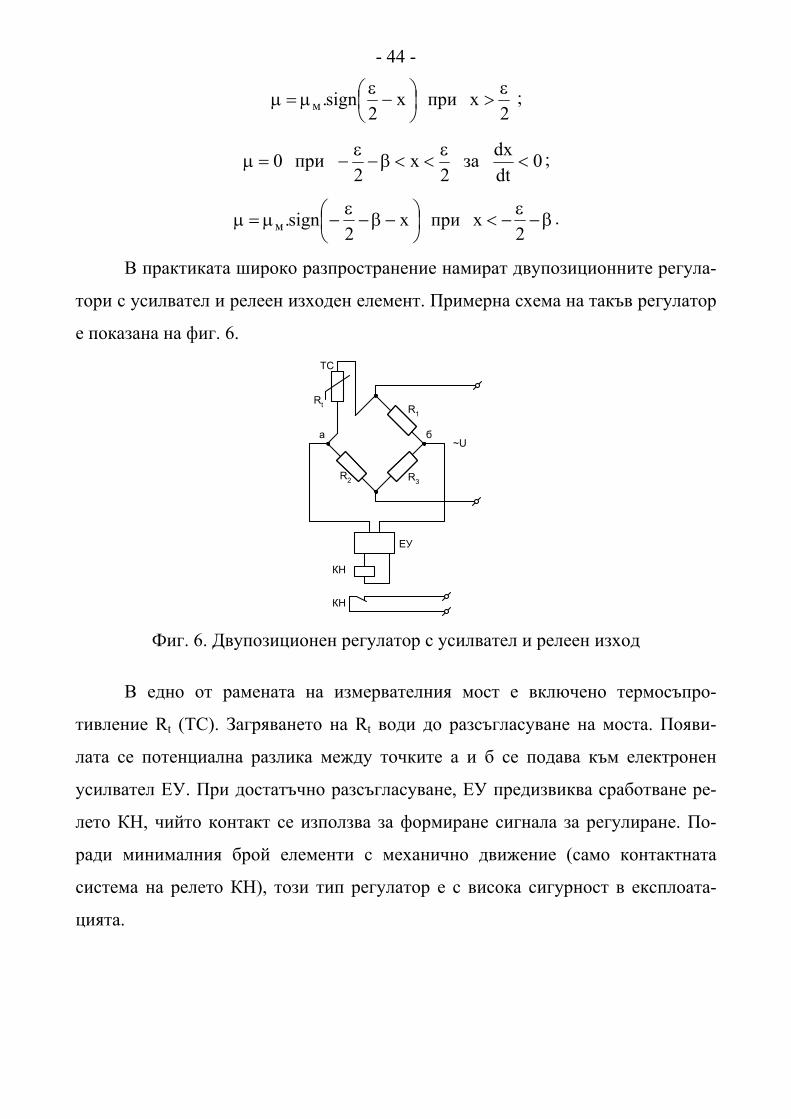
В практиката широко разпространение намират двупозиционните регула-
тори с усилвател и релеен изходен елемент. Примерна схема на такъв регулатор
е показана на фиг. 6. ТС
КН
КН
ЕУ
Rt R1
R2 R3
~Uа б
Фиг. 6. Двупозиционен регулатор с усилвател и релеен изход
В едно от рамената на измервателния мост е включено термосъпро-
тивление Rt (ТС). Загряването на Rt води до разсъгласуване на моста. Появи-
лата се потенциална разлика между точките а и б се подава към електронен
усилвател ЕУ. При достатъчно разсъгласуване, ЕУ предизвиква сработване ре-
лето КН, чийто контакт се използва за формиране сигнала за регулиране. По-
ради минималния брой елементи с механично движение (само контактната
система на релето КН), този тип регулатор е с висока сигурност в експлоата-
цията.
- 45 -Структура и динамични характеристики на аналогови регулатори,
реализиращи еталонни линейни закони за управление
1. Пропорционален (П) регулатор
Пропорционален е тези регулатор, при който изменението на изходната
величина е пропорционално на изменението на входната, т.е.
)t(e.k)t( p Δ=μΔ .
Ако нарастването започва от нулево изходно положение, уравнението на
П регулатора има вида
),t(e.k)t( p=μ
където pk е коефициент на пропорционалност на регулатора и представлява
единствения параметър за настройка на този регулатор.
Обратната величина ,k1
p изразена в проценти ⎟
⎟⎠
⎞⎜⎜⎝
⎛%100.
k1p
, е прието да се
нарича зона на регулиране или коефициент на дроселиране.
Структурната схема на идеален П регулатор има вида показан на фиг. 1.
( )pе ( )рμpk
Фиг. 1. Структурна схема на идеален П регулатор
Следователно структурната схема на идеален П регулатор съвпада с тази
на пропорционално звено.
Предавателната функция на пропорционалния регулатор съвпада с .kp
pk)p(W = .
Преходната характеристика има вида
pk)t(h = .
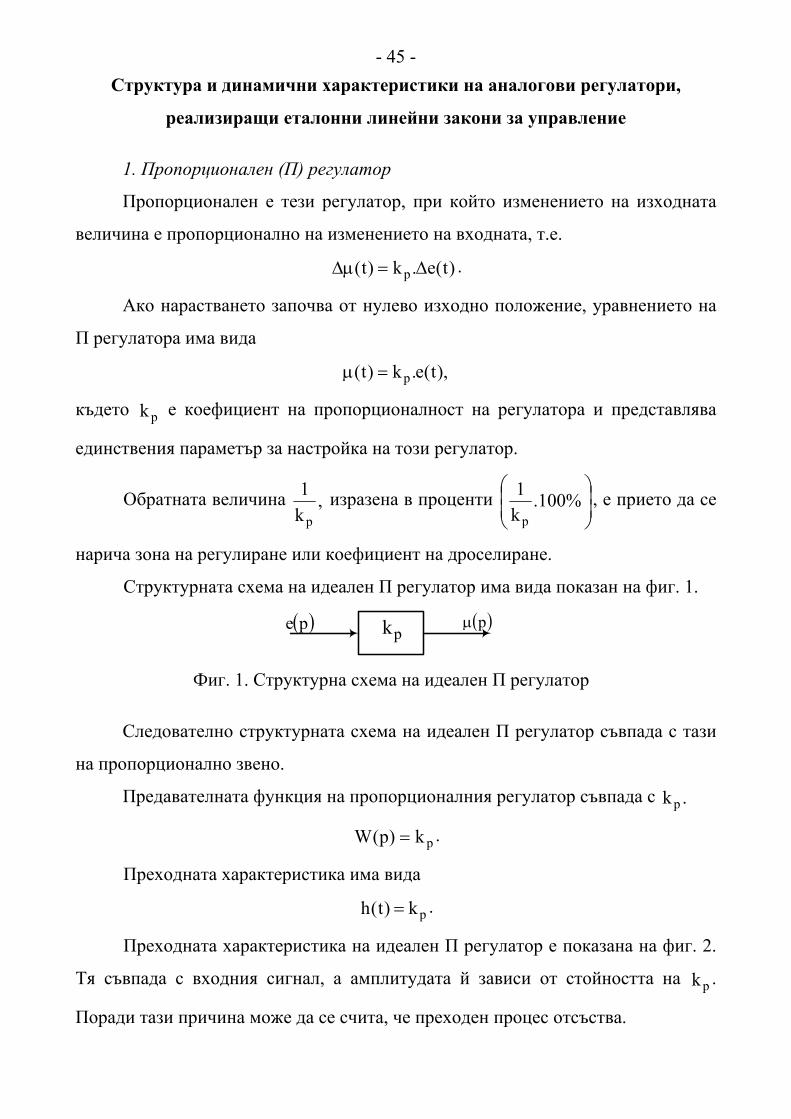
Преходната характеристика на идеален П регулатор е показана на фиг. 2.
Тя съвпада с входния сигнал, а амплитудата й зависи от стойността на pk .
Поради тази причина може да се счита, че преходен процес отсъства.
- 46 -
Фиг. 2. Преходна характеристика на идеален П регулатор при 1kp =
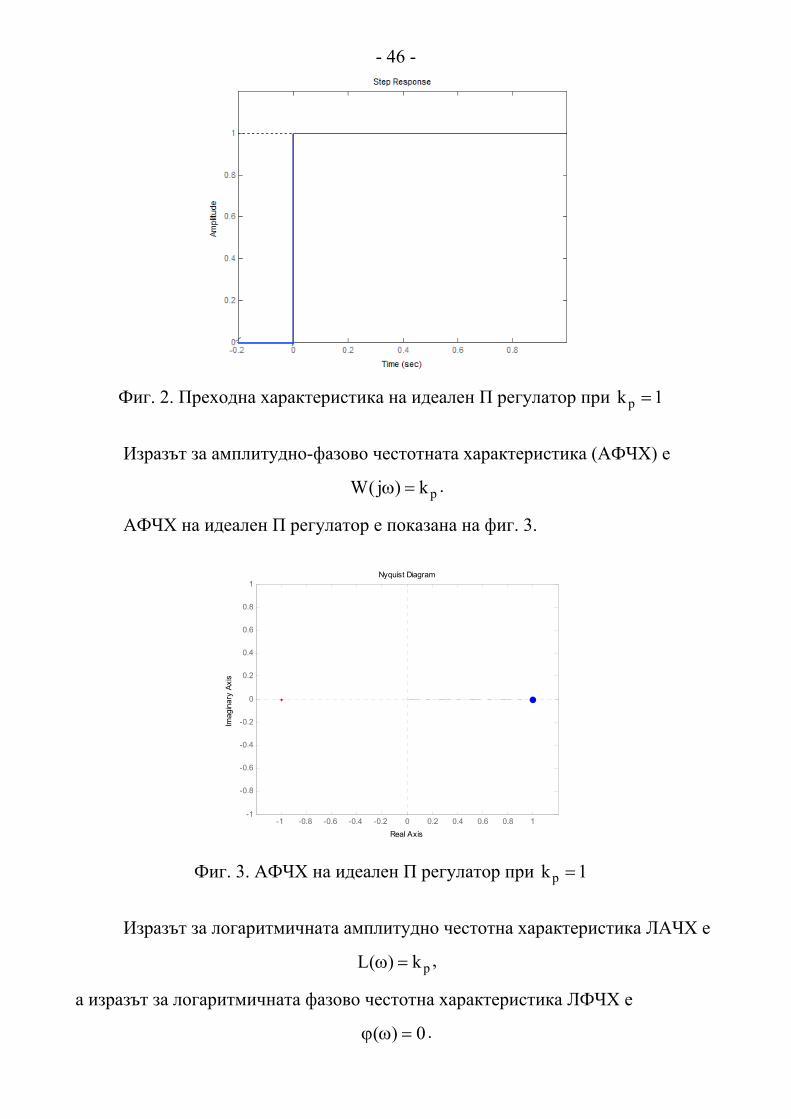
Изразът за амплитудно-фазово честотната характеристика (АФЧХ) е
pk)j(W =ω .
АФЧХ на идеален П регулатор е показана на фиг. 3.
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 3. АФЧХ на идеален П регулатор при 1kp =
Изразът за логаритмичната амплитудно честотна характеристика ЛАЧХ е
pk)(L =ω ,
а изразът за логаритмичната фазово честотна характеристика ЛФЧХ е
0)( =ωϕ .
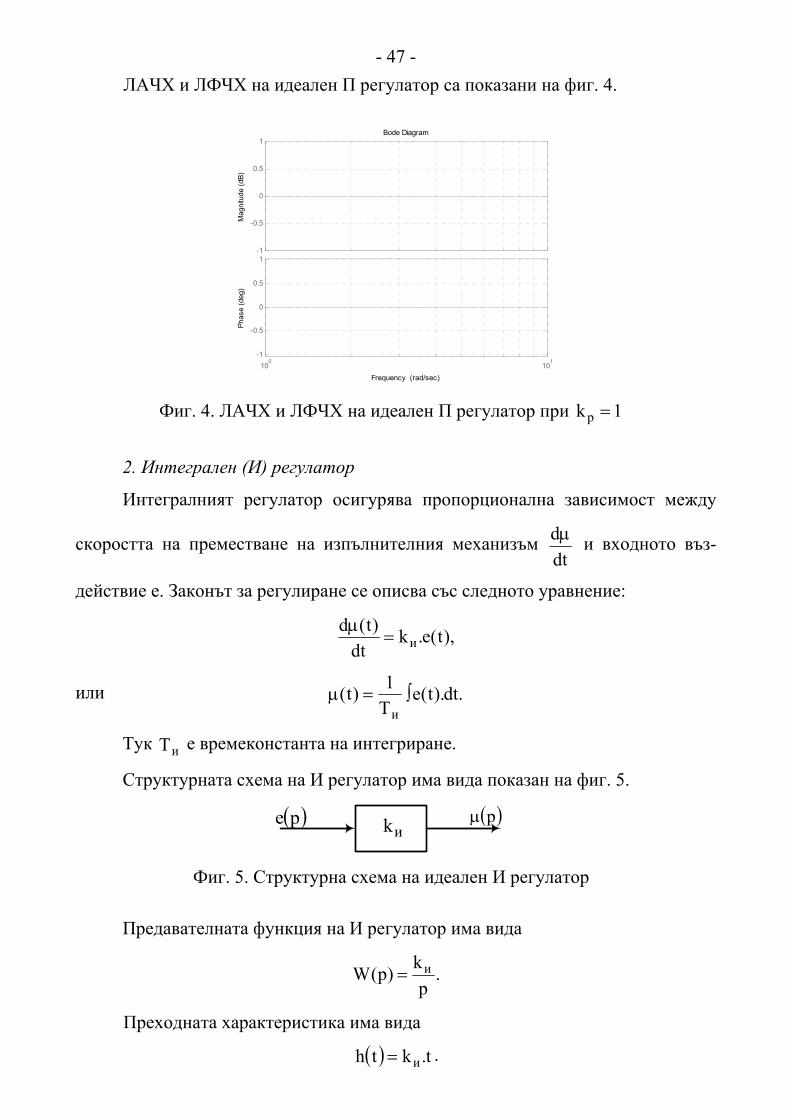
- 47 - ЛАЧХ и ЛФЧХ на идеален П регулатор са показани на фиг. 4.
-1
-0.5
0
0.5
1
Mag
nitu
de (d
B)
100
101
-1
-0.5
0
0.5
1
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec) Фиг. 4. ЛАЧХ и ЛФЧХ на идеален П регулатор при 1kp =
2. Интегралeн (И) регулатор
Интегралният регулатор осигурява пропорционална зависимост между
скоростта на преместване на изпълнителния механизъм dtdμ и входното въз-
действие е. Законът за регулиране се описва със следното уравнение:
),t(e.kdt
)t(dи=
μ
или .dt).t(eТ1)t(и∫=μ
Тук иТ е времеконстанта на интегриране.
Структурната схема на И регулатор има вида показан на фиг. 5.
( )pе ( )рμиk
Фиг. 5. Структурна схема на идеален И регулатор
Предавателната функция на И регулатор има вида
.p
k)p(W и=
Преходната характеристика има вида
( ) t.kth и= .
- 48 - Преходната характеристика на идеален И регулатор е показана на фиг. 6.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Step Response
Time (sec)
Ampl
itude
Фиг. 6. Преходна характеристика на идеален И регулатор при 1kи =
Изразът за АФЧХ има вида
.e.kjk)j(W 2
jииπ
−
ω=
ω=ω
АФЧХ на идеален И регулатор е показана на фиг. 7.
-1.5 -1 -0.5 0 0.5 1 1.5-5
-4
-3
-2
-1
0
1
2
3
4
5Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 7. АФЧХ на идеален И регулатор при 1kи =
Изразът за ЛАЧХ е
( ) ω−=ω lg20klg20L и ,
а изразът за ЛФЧХ е
- 49 -
2)( π
−=ωϕ .
ЛАЧХ и ЛФЧХ на идеален И регулатор са показани на фиг. 8.
-20
-10
0
10
20
Mag
nitu
de (d
B)
10-1
100
101
-91
-90.5
-90
-89.5
-89
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec) Фиг. 8. ЛАЧХ и ЛФЧХ на идеален И регулатор при 1kи =
3. Пропорционално-интегрален (ПИ) регулатор
Пропорционално-интегралният регулатор съдържат в себе си както П,
така и И регулатор. На изхода си той реализира величина, пропорционална на
отклонението на регулираната велиина и на нейния интеграл във времето.
.dt.eT1ek)t(и
p ⎟⎟⎠
⎞⎜⎜⎝
⎛∫+=μ
В това уравнение pk е коефициент на пропорционалност на регулатора, а
иT е времеконстанта на интегриране (на изодрома).
Структурната схема на ПИ регулатор има вида показан на фиг. 9.
pk
( )pμ
p.Tk
и
p
( )ре
Фиг. 9. Структурна схема на идеален ПИ регулатор
ПИ регулаторът има два параметъра за настройка – pk и иT . Ако време-
константата иT е с много голяма стойност, ПИ регулаторът се превръща в П
- 50 -регулатор. Ако едновременно pk и иT са малки по стойност – той практически
се доближава до И регулатор с предавателен коефициент и
р
Tk
. Може да се
постигне устойчива работа при обекти, които с И регулатор са неработоспо-
собни.
Съгласно диференциалното уравнение предавателната функция на ПИ ре-
гулатора е
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
p.T11k)p(Wи
p .
Преходната характеристика има вида
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
иp T
t1k)t(h .
Преходна характеристика на идеален ПИ регулатор е показана на фиг. 10.
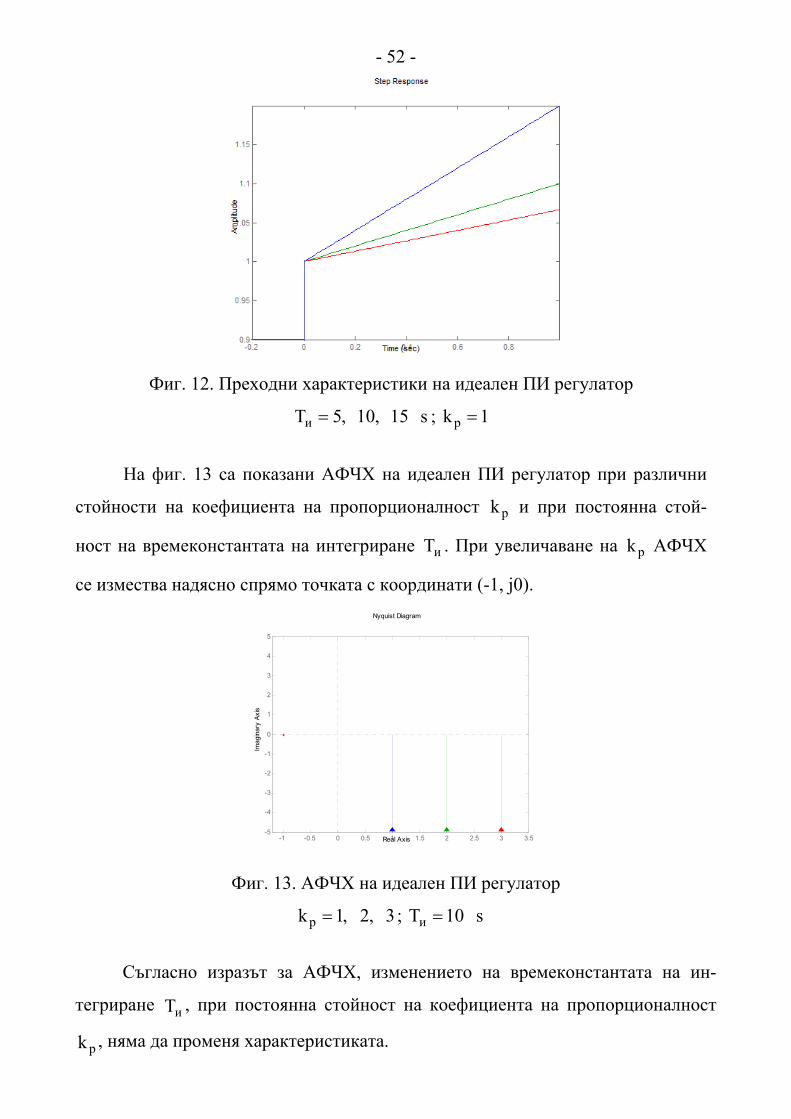
Фиг. 10. Преходна характеристика на идеален ПИ регулатор
1kp = ; s10Tи =
На фиг. 11 са показани преходни характеристики на идеален ПИ регула-
тор при различни стойности на коефициента на пропорционалност и при пос-
тоянна стойност на времеконстантата на интегриране иT . При увеличаване на
pk се повишава амплитудата на преходната му характеристика, без да се про-
меня наклона й.
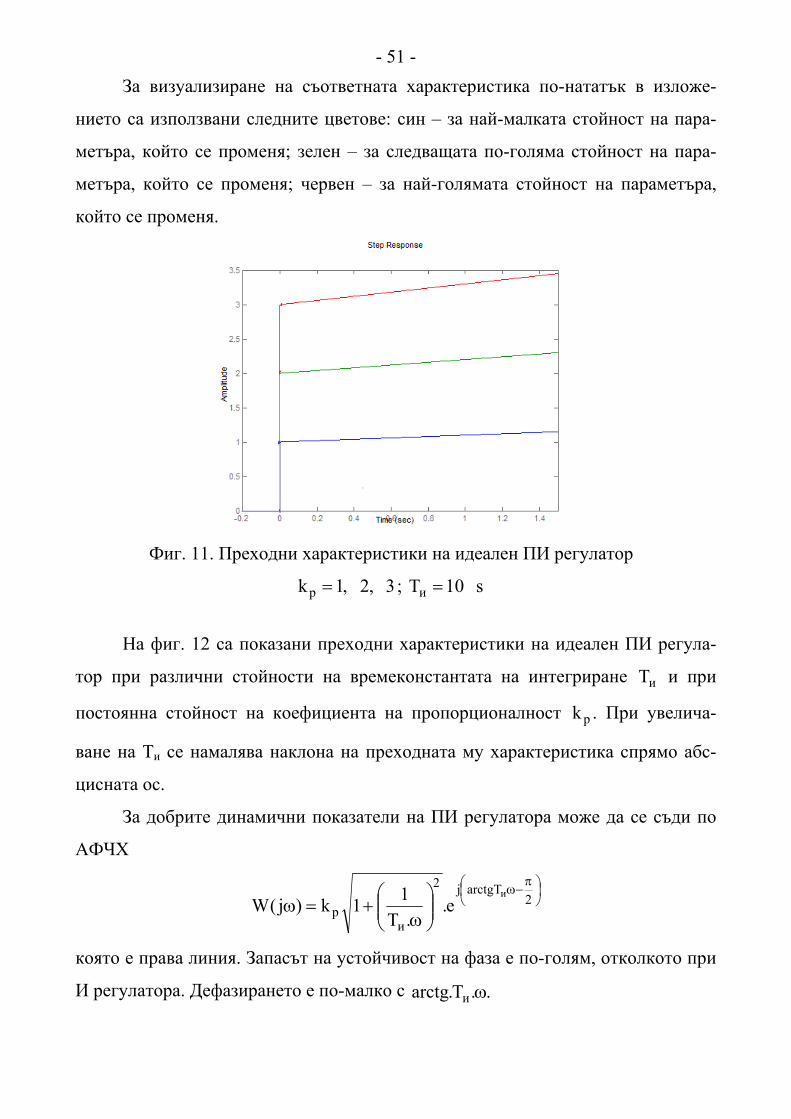
- 51 -За визуализиране на съответната характеристика по-нататък в изложе-
нието са използвани следните цветове: син – за най-малката стойност на пара-
метъра, който се променя; зелен – за следващата по-голяма стойност на пара-
метъра, който се променя; червен – за най-голямата стойност на параметъра,
който се променя.
Фиг. 11. Преходни характеристики на идеален ПИ регулатор
3,2,1kp = ; s10Tи =
На фиг. 12 са показани преходни характеристики на идеален ПИ регула-
тор при различни стойности на времеконстантата на интегриране иT и при
постоянна стойност на коефициента на пропорционалност pk . При увелича-
ване на Ти се намалява наклона на преходната му характеристика спрямо абс-
цисната ос.
За добрите динамични показатели на ПИ регулатора може да се съди по
АФЧХ
⎟⎠⎞
⎜⎝⎛ π
−ω
⎟⎟⎠
⎞⎜⎜⎝
⎛ω
+=ω 2arctgTj2
иp
иe.
.T11k)j(W
която е права линия. Запасът на устойчивост на фаза е по-голям, отколкото при
И регулатора. Дефазирането е по-малко с ..T.arctg и ω
- 52 -
Фиг. 12. Преходни характеристики на идеален ПИ регулатор
s15,10,5Tи = ; 1kp =
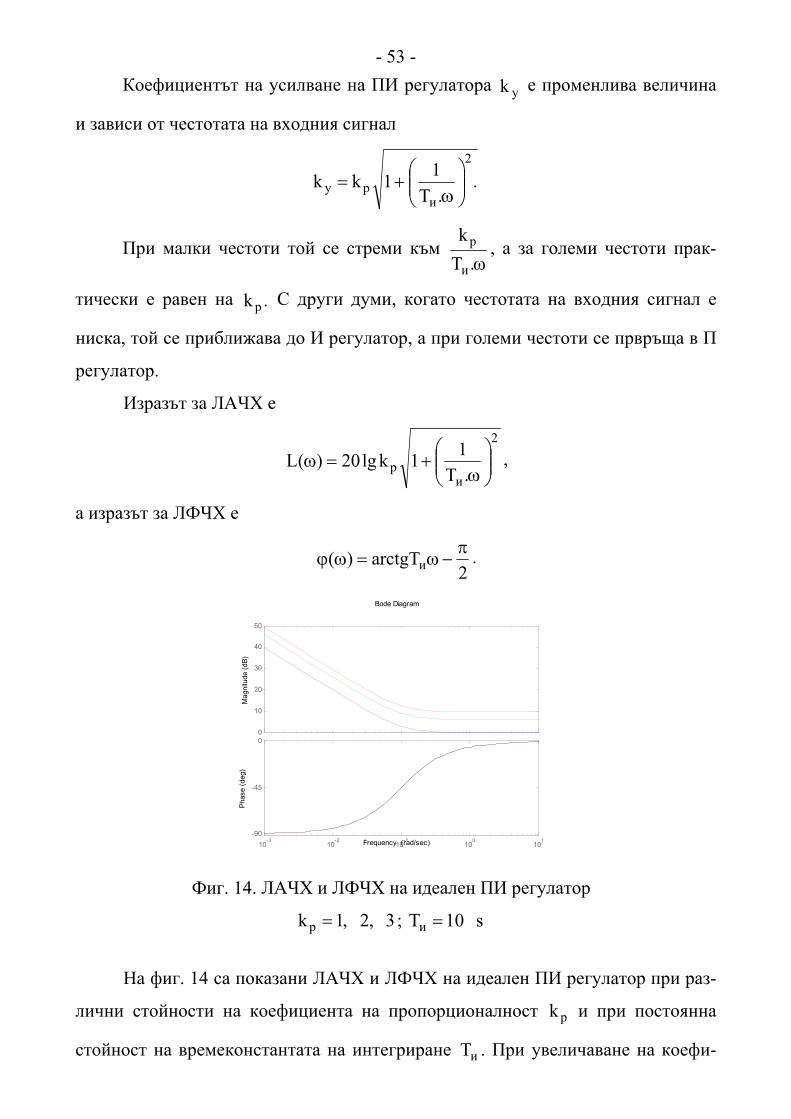
На фиг. 13 са показани АФЧХ на идеален ПИ регулатор при различни
стойности на коефициента на пропорционалност pk и при постоянна стой-
ност на времеконстантата на интегриране иT . При увеличаване на pk АФЧХ
се измества надясно спрямо точката с координати (-1, j0).
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5-5
-4
-3
-2
-1
0
1
2
3
4
5
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 13. АФЧХ на идеален ПИ регулатор
3,2,1kp = ; s10Tи =
Съгласно изразът за АФЧХ, изменението на времеконстантата на ин-
тегриране иT , при постоянна стойност на коефициента на пропорционалност
pk , няма да променя характеристиката.
- 53 -Коефициентът на усилване на ПИ регулатора yk е променлива величина
и зависи от честотата на входния сигнал
..T
11kk2
иpy ⎟⎟
⎠
⎞⎜⎜⎝
⎛ω
+=
При малки честоти той се стреми към ω.T
k
и
p , а за големи честоти прак-
тически е равен на .k p С други думи, когато честотата на входния сигнал е
ниска, той се приближава до И регулатор, а при големи честоти се првръща в П
регулатор.
Изразът за ЛАЧХ е
2
иp .T
11klg20)(L ⎟⎟⎠
⎞⎜⎜⎝
⎛ω
+=ω ,
а изразът за ЛФЧХ е
2arctgT)( и
π−ω=ωϕ .
0
10
20
30
40
50
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 14. ЛАЧХ и ЛФЧХ на идеален ПИ регулатор
3,2,1kp = ; s10Tи =
На фиг. 14 са показани ЛАЧХ и ЛФЧХ на идеален ПИ регулатор при раз-
лични стойности на коефициента на пропорционалност pk и при постоянна
стойност на времеконстантата на интегриране иT . При увеличаване на коефи-
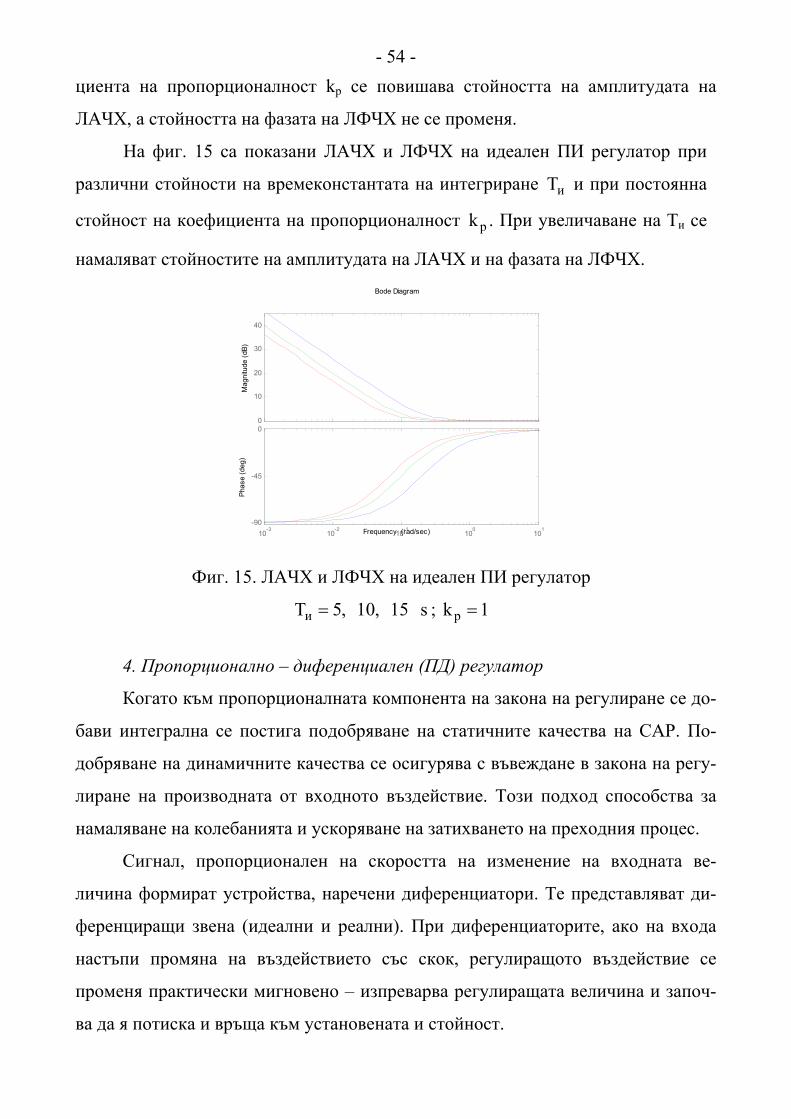
- 54 -циента на пропорционалност kp се повишава стойността на амплитудата на
ЛАЧХ, а стойността на фазата на ЛФЧХ не се променя.
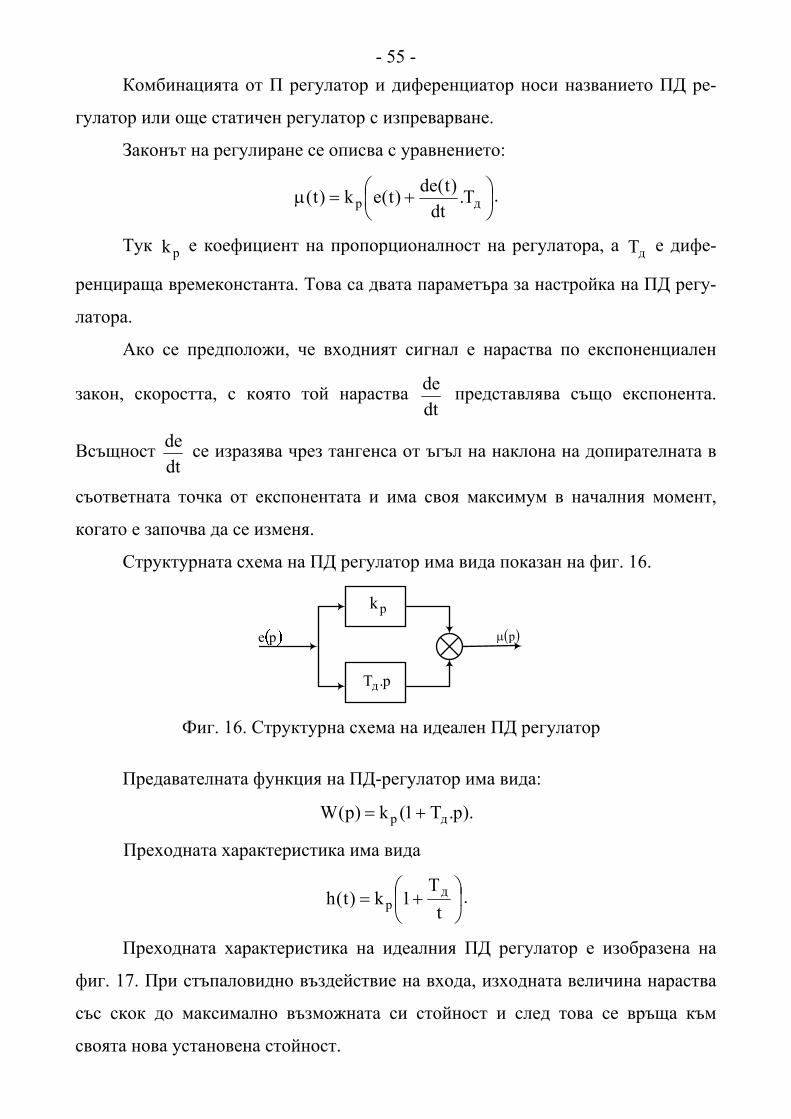
На фиг. 15 са показани ЛАЧХ и ЛФЧХ на идеален ПИ регулатор при
различни стойности на времеконстантата на интегриране иT и при постоянна
стойност на коефициента на пропорционалност pk . При увеличаване на Ти се
намаляват стойностите на амплитудата на ЛАЧХ и на фазата на ЛФЧХ.
0
10
20
30
40
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 15. ЛАЧХ и ЛФЧХ на идеален ПИ регулатор
s15,10,5Tи = ; 1kp =
4. Пропорционално – диференциален (ПД) регулатор
Когaто към пропорционалната компонента на закона на регулиране се до-
бави интегрална се постига подобряване на статичните качества на САР. По-
добряване на динамичните качества се осигурява с въвеждане в закона на регу-
лиране на производната от входното въздействие. Този подход способства за
намаляване на колебанията и ускоряване на затихването на преходния процес.
Сигнал, пропорционален на скоростта на изменение на входната ве-
личина формират устройства, наречени диференциатори. Те представляват ди-
ференциращи звена (идеални и реални). При диференциаторите, ако на входа
настъпи промяна на въздействието със скок, регулиращото въздействие се
променя практически мигновено – изпреварва регулиращата величина и започ-
ва да я потиска и връща към установената и стойност.
- 55 -Комбинацията от П регулатор и диференциатор носи названието ПД ре-
гулатор или още статичен регулатор с изпреварване.
Законът на регулиране се описва с уравнението:
⎟⎠⎞
⎜⎝⎛ +=μ дp T.
dt)t(de)t(ek)t( .
Тук pk е коефициент на пропорционалност на регулатора, а дT е дифе-
ренцираща времеконстанта. Това са двата параметъра за настройка на ПД регу-
латора.
Ако се предположи, че входният сигнал е нараства по експоненциален
закон, скоростта, с която той нараства dtde представлява също експонента.
Всъщност dtde се изразява чрез тангенса от ъгъл на наклона на допирателната в
съответната точка от експонентата и има своя максимум в началния момент,
когато е започва да се изменя.
Структурната схема на ПД регулатор има вида показан на фиг. 16.
pе
pk
( )pμ
р.Tд
Фиг. 16. Структурна схема на идеален ПД регулатор
Предавателната функция на ПД-регулатор има вида:
).p.T1(k)p(W дp +=
Преходната характеристика има вида
⎟⎠
⎞⎜⎝
⎛+=
tТ
1k)t(h дp .
Преходната характеристика на идеалния ПД регулатор е изобразена на
фиг. 17. При стъпаловидно въздействие на входа, изходната величина нараства
със скок до максимално възможната си стойност и след това се връща към
своята нова установена стойност.
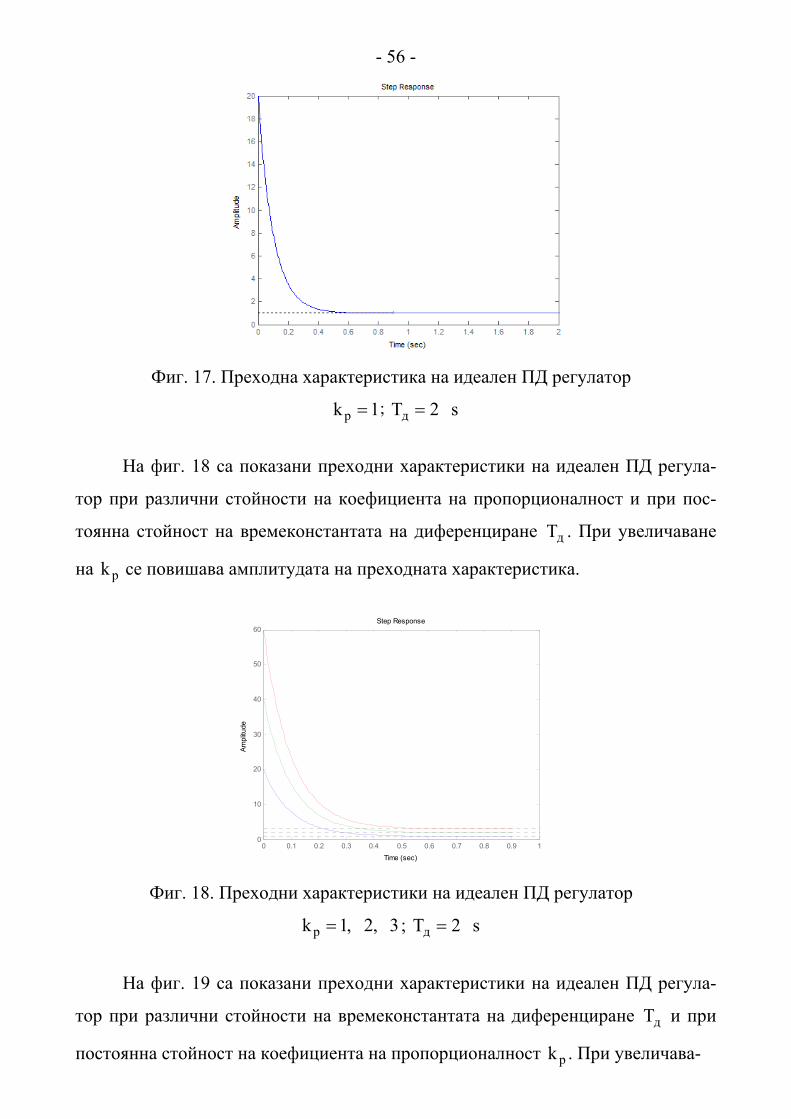
- 56 -
Фиг. 17. Преходна характеристика на идеален ПД регулатор
1kp = ; s2Tд =
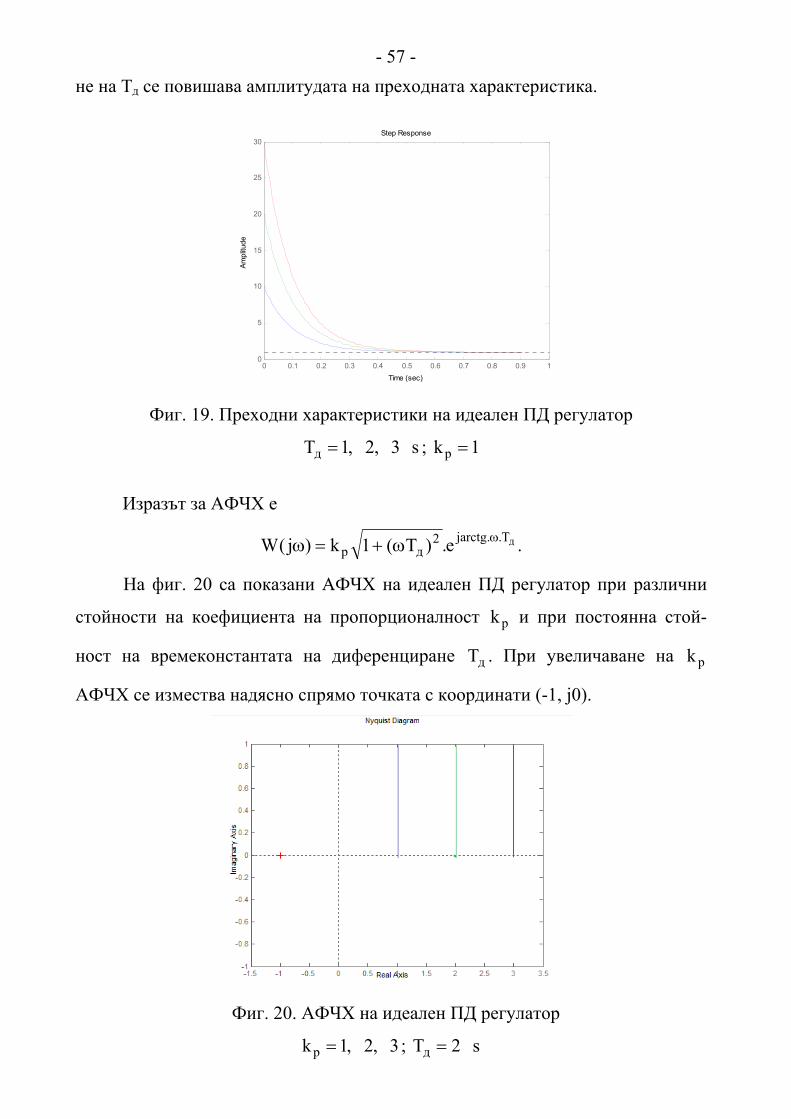
На фиг. 18 са показани преходни характеристики на идеален ПД регула-
тор при различни стойности на коефициента на пропорционалност и при пос-
тоянна стойност на времеконстантата на диференциране дT . При увеличаване
на pk се повишава амплитудата на преходната характеристика.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60Step Response
Time (sec)
Ampl
itude
Фиг. 18. Преходни характеристики на идеален ПД регулатор
3,2,1kp = ; s2Tд =
На фиг. 19 са показани преходни характеристики на идеален ПД регула-
тор при различни стойности на времеконстантата на диференциране дT и при
постоянна стойност на коефициента на пропорционалност pk . При увеличава-
- 57 -не на Тд се повишава амплитудата на преходната характеристика.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
30Step Response
Time (sec)
Ampl
itude
Фиг. 19. Преходни характеристики на идеален ПД регулатор
s3,2,1Tд = ; 1kp =
Изразът за АФЧХ е
.e.)T(1k)j(W дT..jarctg2дp
ωω+=ω
На фиг. 20 са показани АФЧХ на идеален ПД регулатор при различни
стойности на коефициента на пропорционалност pk и при постоянна стой-
ност на времеконстантата на диференциране дT . При увеличаване на pk
АФЧХ се измества надясно спрямо точката с координати (-1, j0).
Фиг. 20. АФЧХ на идеален ПД регулатор
3,2,1kp = ; s2Tд =
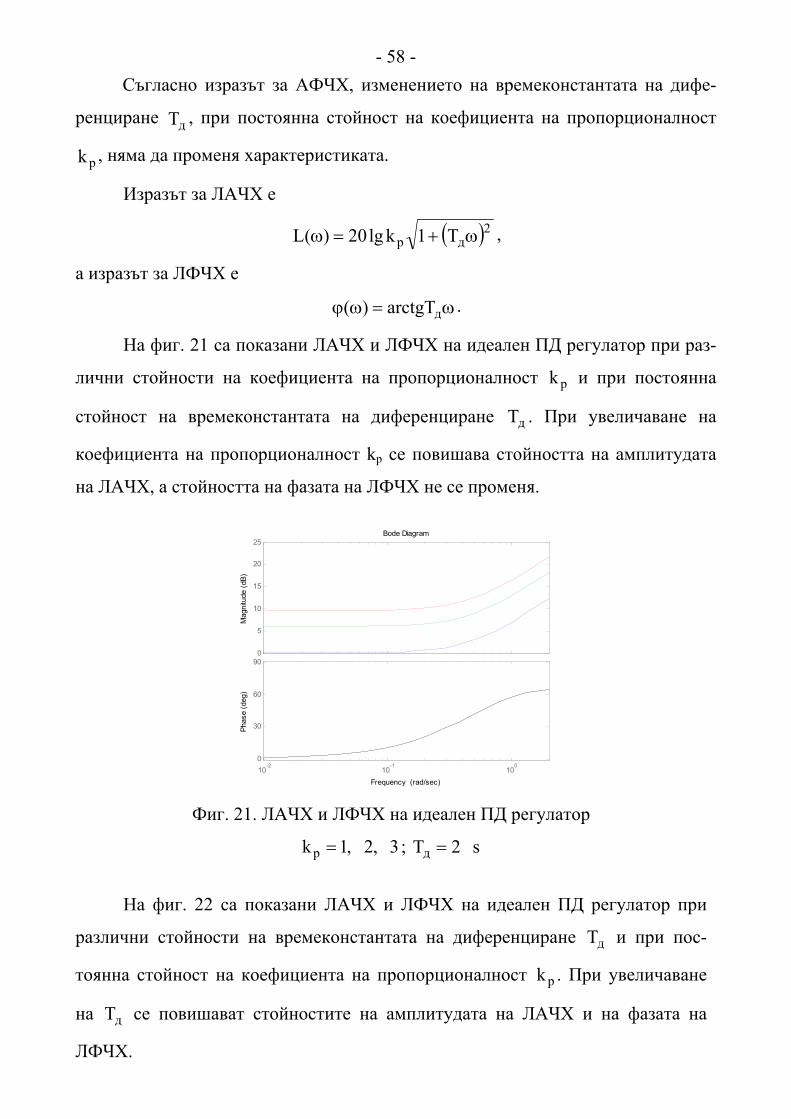
- 58 -Съгласно изразът за АФЧХ, изменението на времеконстантата на дифе-
ренциране дT , при постоянна стойност на коефициента на пропорционалност
pk , няма да променя характеристиката.
Изразът за ЛАЧХ е
( )2дp T1klg20)(L ω+=ω ,
а изразът за ЛФЧХ е
ω=ωϕ дarctgT)( .
На фиг. 21 са показани ЛАЧХ и ЛФЧХ на идеален ПД регулатор при раз-
лични стойности на коефициента на пропорционалност pk и при постоянна
стойност на времеконстантата на диференциране дT . При увеличаване на
коефициента на пропорционалност kp се повишава стойността на амплитудата
на ЛАЧХ, а стойността на фазата на ЛФЧХ не се променя.
0
5
10
15
20
25
Mag
nitu
de (d
B)
10-2
10-1
100
0
30
60
90
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec) Фиг. 21. ЛАЧХ и ЛФЧХ на идеален ПД регулатор
3,2,1kp = ; s2Tд =
На фиг. 22 са показани ЛАЧХ и ЛФЧХ на идеален ПД регулатор при
различни стойности на времеконстантата на диференциране дT и при пос-
тоянна стойност на коефициента на пропорционалност pk . При увеличаване
на дT се повишават стойностите на амплитудата на ЛАЧХ и на фазата на
ЛФЧХ.
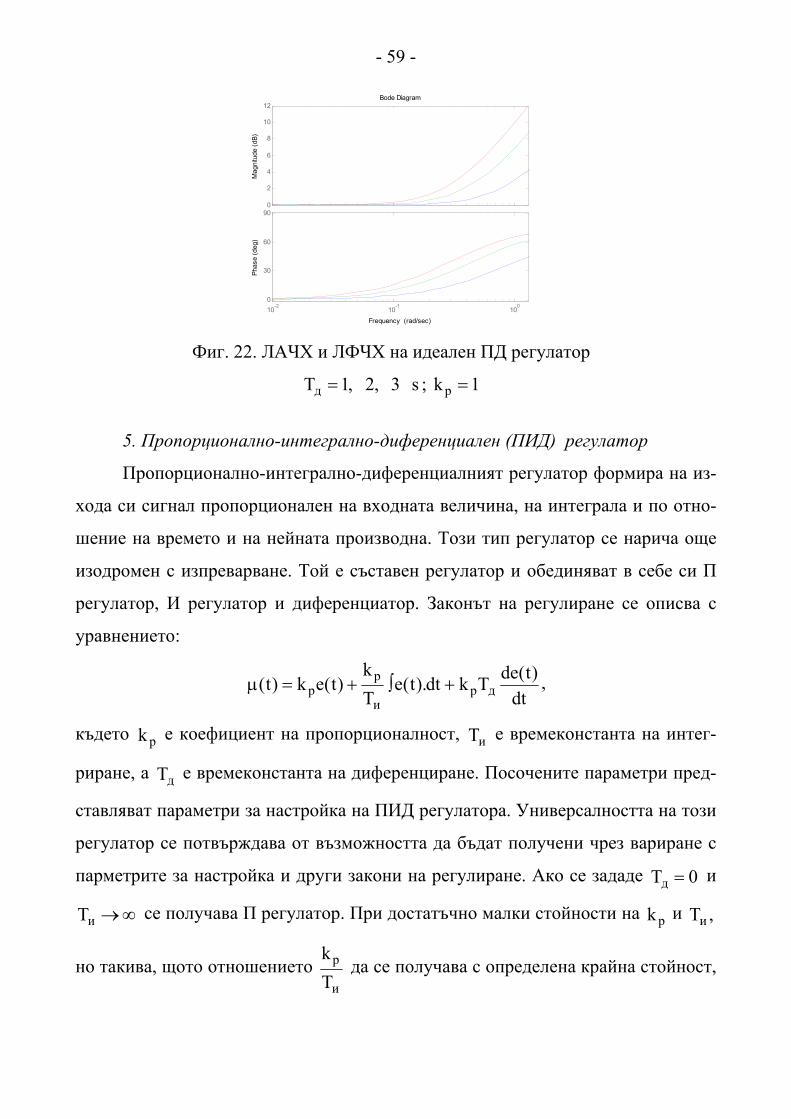
- 59 -
0
2
4
6
8
10
12
Mag
nitu
de (d
B)
10-2
10-1
100
0
30
60
90
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec) Фиг. 22. ЛАЧХ и ЛФЧХ на идеален ПД регулатор
s3,2,1Tд = ; 1kp =
5. Пропорционално-интегрално-диференциален (ПИД) регулатор
Пропорционално-интегрално-диференциалният регулатор формира на из-
хода си сигнал пропорционален на входната величина, на интеграла и по отно-
шение на времето и на нейната производна. Този тип регулатор се нарича още
изодромен с изпреварване. Той е съставен регулатор и обединяват в себе си П
регулатор, И регулатор и диференциатор. Законът на регулиране се описва с
уравнението:
dt)t(deTkdt).t(e
Tk
)t(ek)t( дpи
pp +∫+=μ ,
където pk е коефициент на пропорционалност, иT е времеконстанта на интег-
риране, а дT е времеконстанта на диференциране. Посочените параметри пред-
ставляват параметри за настройка на ПИД регулатора. Универсалността на този
регулатор се потвърждава от възможността да бъдат получени чрез вариране с
парметрите за настройка и други закони на регулиране. Ако се зададе 0Tд = и
∞→иT се получава П регулатор. При достатъчно малки стойности на pk и ,Tи
но такива, щото отношението и
р
Tk
да се получава с определена крайна стойност,
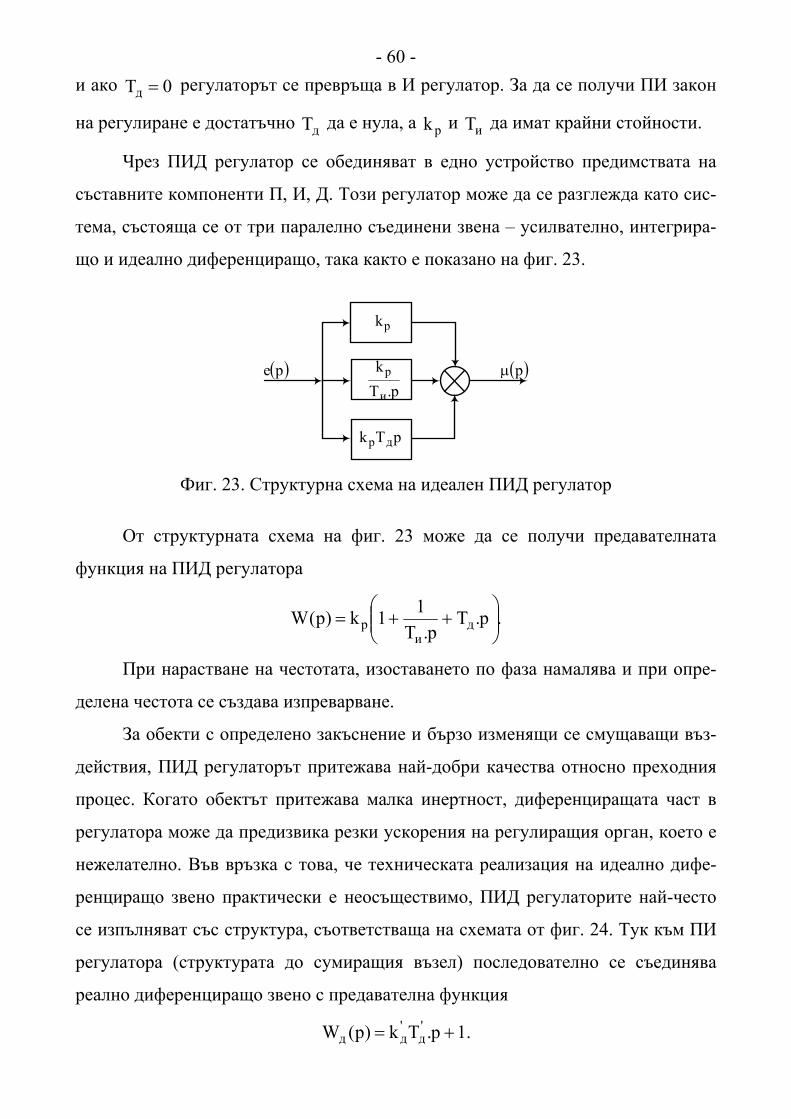
- 60 -и ако 0Tд = регулаторът се превръща в И регулатор. За да се получи ПИ закон
на регулиране е достатъчно дT да е нула, а pk и иT да имат крайни стойности.
Чрез ПИД регулатор се обединяват в едно устройство предимствата на
съставните компоненти П, И, Д. Този регулатор може да се разглежда като сис-
тема, състояща се от три паралелно съединени звена – усилвателно, интегрира-
що и идеално диференциращо, така както е показано на фиг. 23.
pk
( )pе ( )pμp.Т
k
и
р
рТk др
Фиг. 23. Структурна схема на идеален ПИД регулатор
От структурната схема на фиг. 23 може да се получи предавателната
функция на ПИД регулатора
.p.Tp.T
11k)p(W ди
p ⎟⎟⎠
⎞⎜⎜⎝
⎛++=
При нарастване на честотата, изоставането по фаза намалява и при опре-
делена честота се създава изпреварване.
За обекти с определено закъснение и бързо изменящи се смущаващи въз-
действия, ПИД регулаторът притежава най-добри качества относно преходния
процес. Когато обектът притежава малка инертност, диференциращата част в
регулатора може да предизвика резки ускорения на регулиращия орган, което е
нежелателно. Във връзка с това, че техническата реализация на идеално дифе-
ренциращо звено практически е неосъществимо, ПИД регулаторите най-често
се изпълняват със структура, съответстваща на схемата от фиг. 24. Тук към ПИ
регулатора (структурата до сумиращия възел) последователно се съединява
реално диференциращо звено с предавателна функция
.1p.Tk)p(W 'д
'дд +=
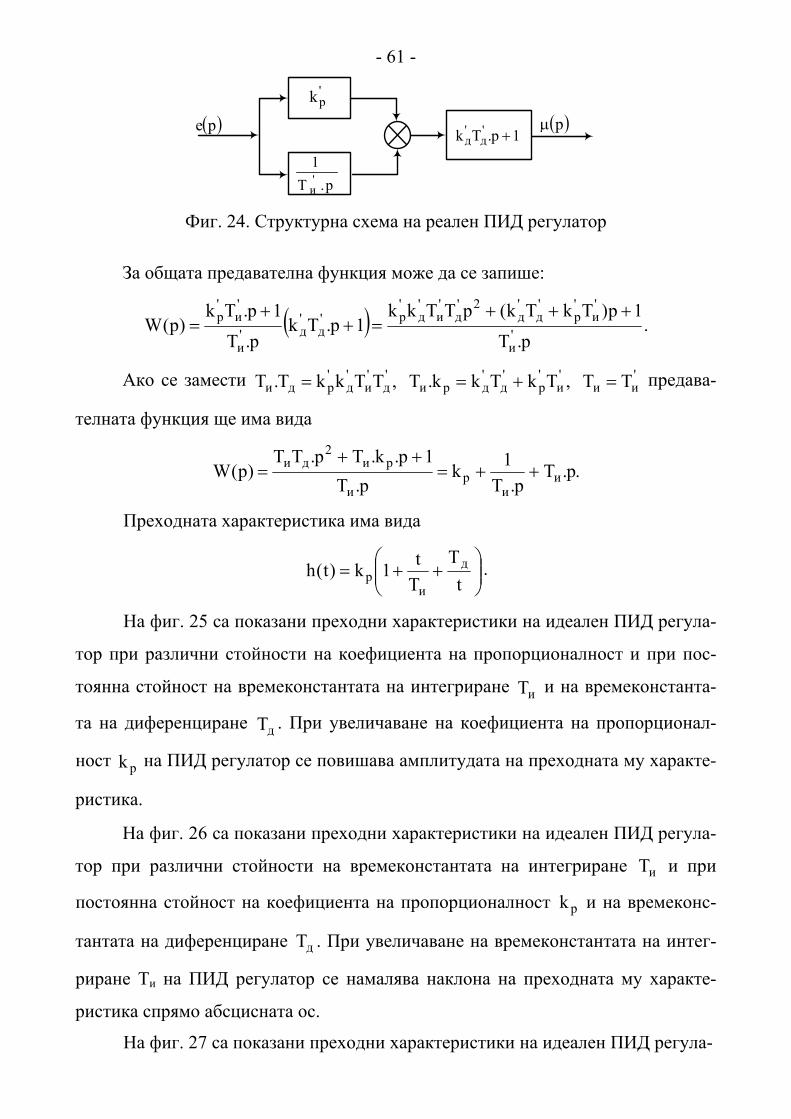
- 61 -
( )pμ
'рk
( )pе1р.Tk '
д'д +
р.T1'и
Фиг. 24. Структурна схема на реален ПИД регулатор
За общата предавателна функция може да се запише:
( ) .p.T
1p)TkTk(pTTkk1p.Tk
p.T
1p.Tk)p(W '
и
'и
'р
'д
'д
2'д
'и
'д
'р'
д'д'
и
'и
'p +++
=++
=
Ако се замести 'ии
'и
'р
'д
'дpи
'д
'и
'д
'рди TT,TkTkk.T,TTkkT.T =+== предава-
телната функция ще има вида
.p.Tp.T
1kp.T
1p.k.Tp.TT)p(W и
иp
и
pи2
ди ++=++
=
Преходната характеристика има вида
⎟⎟⎠
⎞⎜⎜⎝
⎛++=
tТ
Tt1k)t(h д
иp .
На фиг. 25 са показани преходни характеристики на идеален ПИД регула-
тор при различни стойности на коефициента на пропорционалност и при пос-
тоянна стойност на времеконстантата на интегриране иT и на времеконстанта-
та на диференциране дT . При увеличаване на коефициента на пропорционал-
ност pk на ПИД регулатор се повишава амплитудата на преходната му характе-
ристика.
На фиг. 26 са показани преходни характеристики на идеален ПИД регула-
тор при различни стойности на времеконстантата на интегриране иT и при
постоянна стойност на коефициента на пропорционалност pk и на времеконс-
тантата на диференциране дT . При увеличаване на времеконстантата на интег-
риране Ти на ПИД регулатор се намалява наклона на преходната му характе-
ристика спрямо абсцисната ос.
На фиг. 27 са показани преходни характеристики на идеален ПИД регула-
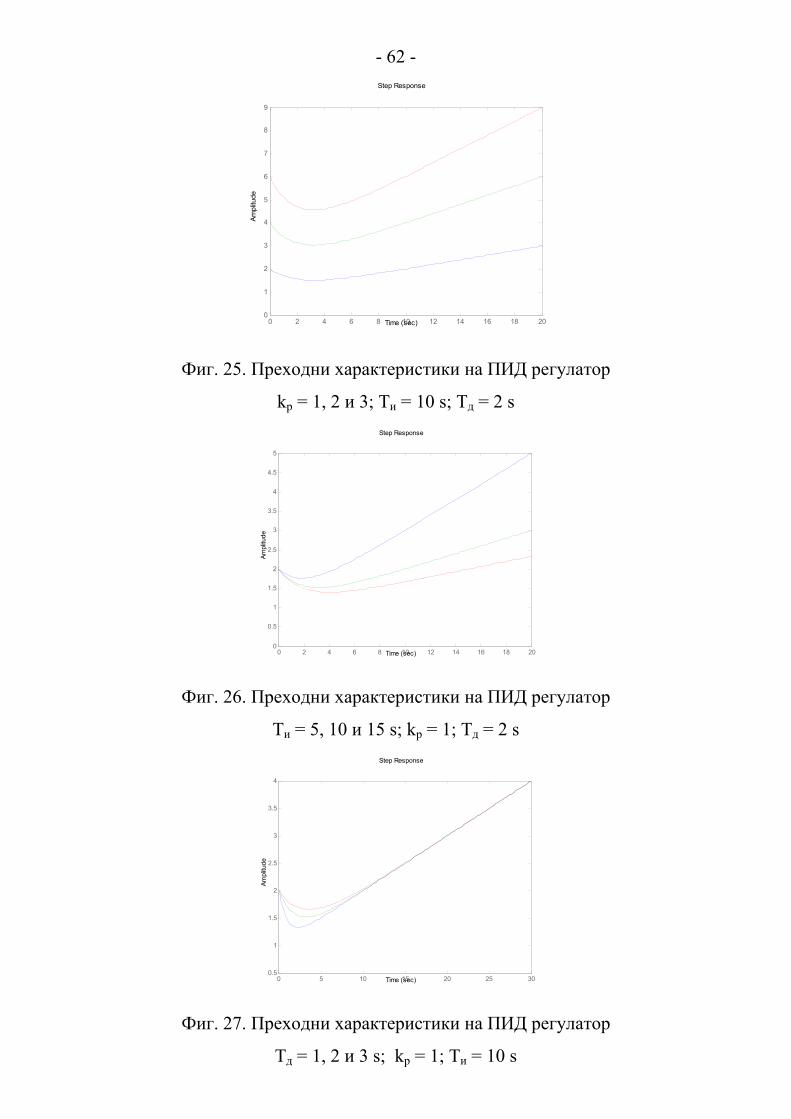
- 62 -
0 2 4 6 8 10 12 14 16 18 200
1
2
3
4
5
6
7
8
9
Step Response
Time (sec)
Ampl
itude
Фиг. 25. Преходни характеристики на ПИД регулатор
kp = 1, 2 и 3; Ти = 10 s; Тд = 2 s
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Step Response
Time (sec)
Ampl
itude
Фиг. 26. Преходни характеристики на ПИД регулатор
Ти = 5, 10 и 15 s; kp = 1; Тд = 2 s
0 5 10 15 20 25 300.5
1
1.5
2
2.5
3
3.5
4
Step Response
Time (sec)
Ampl
itude
Фиг. 27. Преходни характеристики на ПИД регулатор
Тд = 1, 2 и 3 s; kp = 1; Ти = 10 s
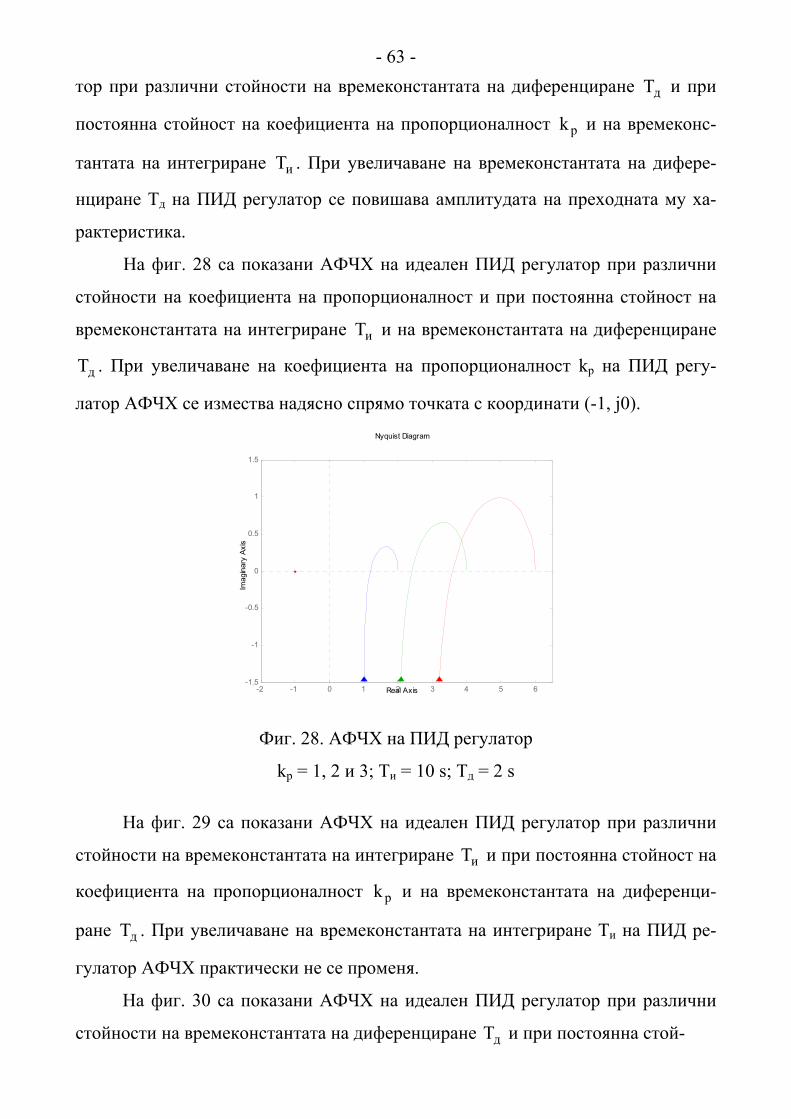
- 63 -тор при различни стойности на времеконстантата на диференциране дT и при
постоянна стойност на коефициента на пропорционалност pk и на времеконс-
тантата на интегриране иT . При увеличаване на времеконстантата на дифере-
нциране Тд на ПИД регулатор се повишава амплитудата на преходната му ха-
рактеристика.
На фиг. 28 са показани АФЧХ на идеален ПИД регулатор при различни
стойности на коефициента на пропорционалност и при постоянна стойност на
времеконстантата на интегриране иT и на времеконстантата на диференциране
дT . При увеличаване на коефициента на пропорционалност kp на ПИД регу-
латор АФЧХ се измества надясно спрямо точката с координати (-1, j0).
-2 -1 0 1 2 3 4 5 6-1.5
-1
-0.5
0
0.5
1
1.5
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 28. АФЧХ на ПИД регулатор
kp = 1, 2 и 3; Ти = 10 s; Тд = 2 s
На фиг. 29 са показани АФЧХ на идеален ПИД регулатор при различни
стойности на времеконстантата на интегриране иT и при постоянна стойност на
коефициента на пропорционалност pk и на времеконстантата на диференци-
ране дT . При увеличаване на времеконстантата на интегриране Ти на ПИД ре-
гулатор АФЧХ практически не се променя.
На фиг. 30 са показани АФЧХ на идеален ПИД регулатор при различни
стойности на времеконстантата на диференциране дT и при постоянна стой-
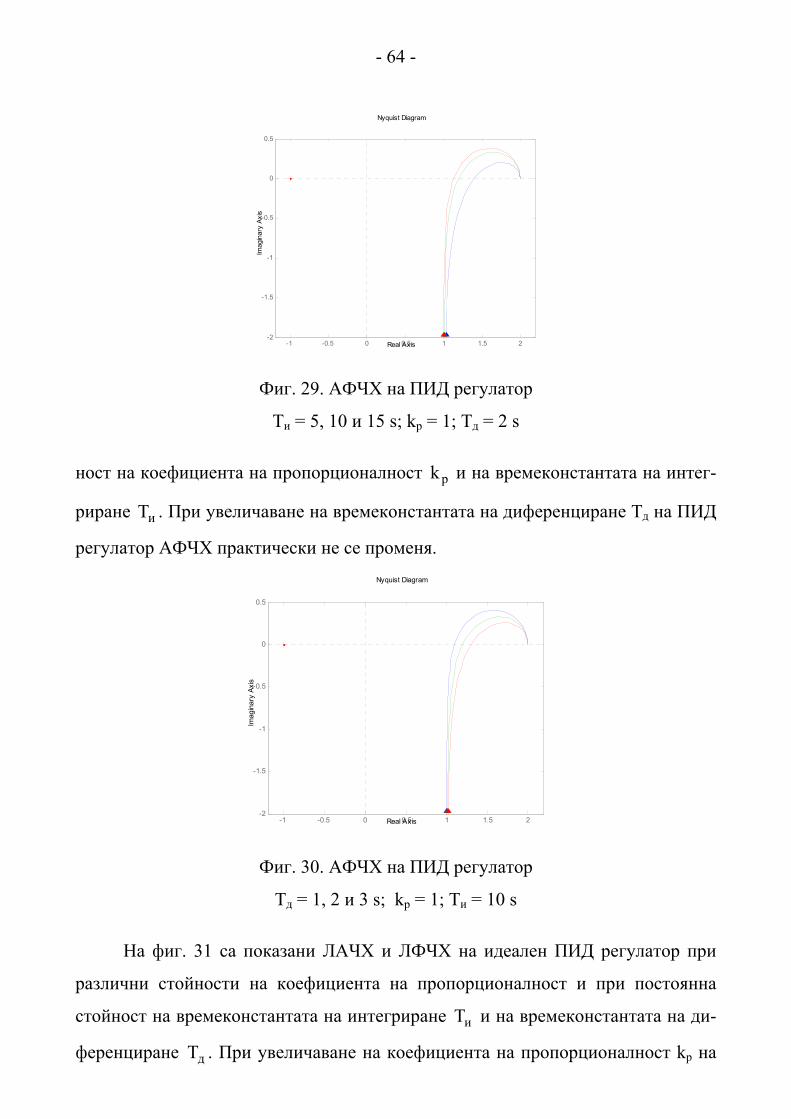
- 64 -
-1 -0.5 0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 29. АФЧХ на ПИД регулатор
Ти = 5, 10 и 15 s; kp = 1; Тд = 2 s
ност на коефициента на пропорционалност pk и на времеконстантата на интег-
риране иT . При увеличаване на времеконстантата на диференциране Тд на ПИД
регулатор АФЧХ практически не се променя.
-1 -0.5 0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 30. АФЧХ на ПИД регулатор
Тд = 1, 2 и 3 s; kp = 1; Ти = 10 s
На фиг. 31 са показани ЛАЧХ и ЛФЧХ на идеален ПИД регулатор при
различни стойности на коефициента на пропорционалност и при постоянна
стойност на времеконстантата на интегриране иT и на времеконстантата на ди-
ференциране дT . При увеличаване на коефициента на пропорционалност kp на
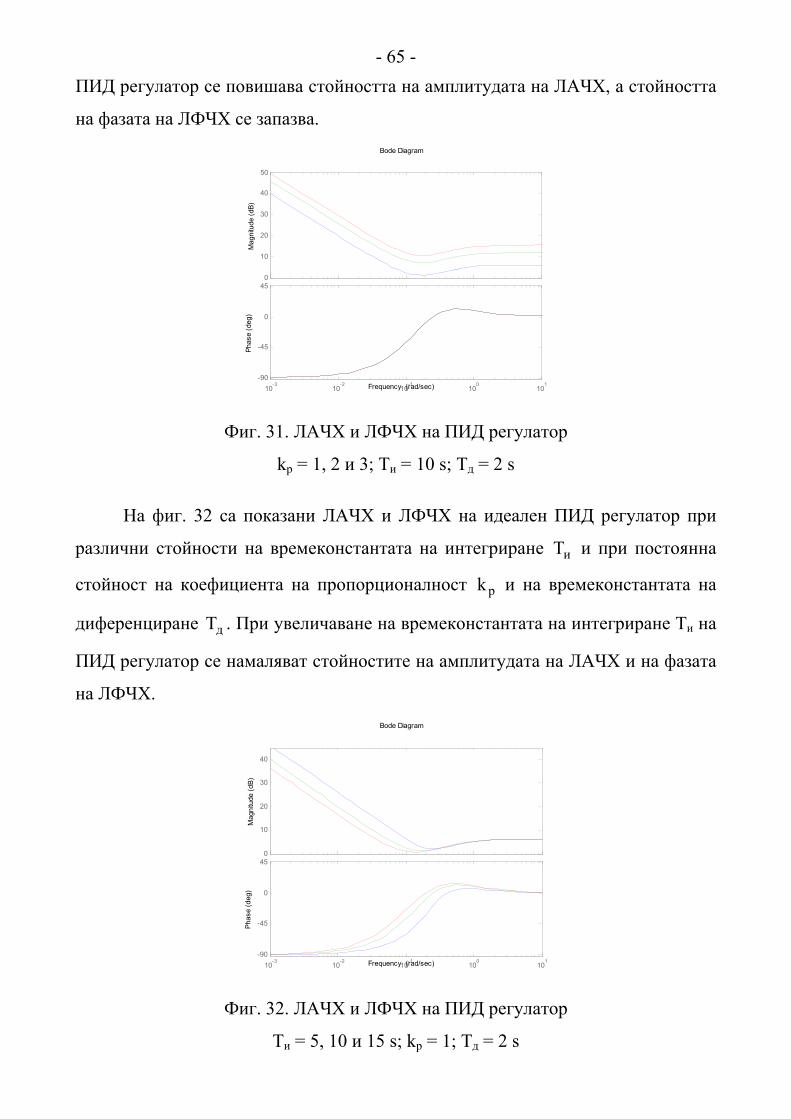
- 65 -ПИД регулатор се повишава стойността на амплитудата на ЛАЧХ, а стойността
на фазата на ЛФЧХ се запазва.
0
10
20
30
40
50
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
-90
-45
0
45
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 31. ЛАЧХ и ЛФЧХ на ПИД регулатор
kp = 1, 2 и 3; Ти = 10 s; Тд = 2 s
На фиг. 32 са показани ЛАЧХ и ЛФЧХ на идеален ПИД регулатор при
различни стойности на времеконстантата на интегриране иT и при постоянна
стойност на коефициента на пропорционалност pk и на времеконстантата на
диференциране дT . При увеличаване на времеконстантата на интегриране Ти на
ПИД регулатор се намаляват стойностите на амплитудата на ЛАЧХ и на фазата
на ЛФЧХ.
0
10
20
30
40
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
-90
-45
0
45
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 32. ЛАЧХ и ЛФЧХ на ПИД регулатор
Ти = 5, 10 и 15 s; kp = 1; Тд = 2 s

- 66 -
На фиг. 33 са показани ЛАЧХ и ЛФЧХ на идеален ПИД регулатор при
различни стойности на времеконстантата на диференциране дT и при постоян-
на стойност на коефициента на пропорционалност pk и на времеконстантата на
интегриране иT . При увеличаване на времеконстантата на диференциране Тд на
ПИД регулатор се повишават стойностите на амплитудата на ЛАЧХ и фазата на
ЛФЧХ.
0
10
20
30
40
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
-90
-45
0
45
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 33. ЛАЧХ и ЛФЧХ на ПИД регулатор
Тд = 1, 2 и 3 s; kp = 1; Ти = 10 s
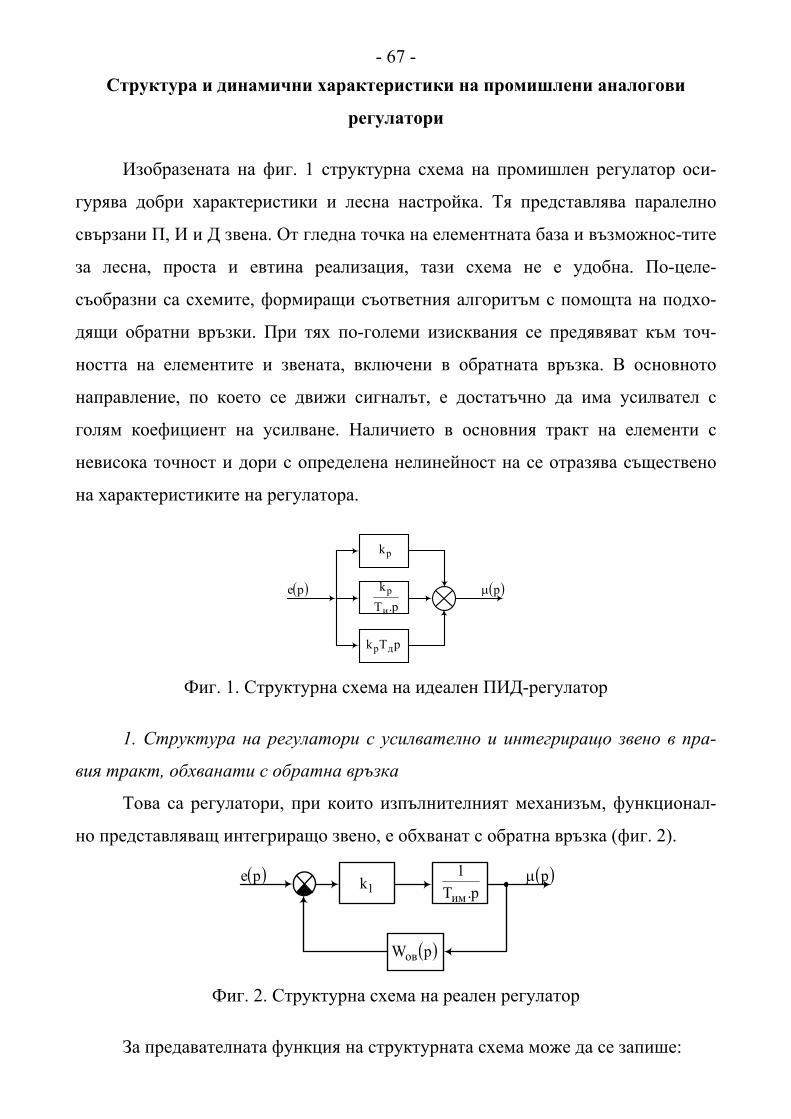
- 67 -Структура и динамични характеристики на промишлени аналогови
регулатори
Изобразената на фиг. 1 структурна схема на промишлен регулатор оси-
гурява добри характеристики и лесна настройка. Тя представлява паралелно
свързани П, И и Д звена. От гледна точка на елементната база и възможнос-тите
за лесна, проста и евтина реализация, тази схема не е удобна. По-целе-
съобразни са схемите, формиращи съответния алгоритъм с помощта на подхо-
дящи обратни връзки. При тях по-големи изисквания се предявяват към точ-
ността на елементите и звената, включени в обратната връзка. В основното
направление, по което се движи сигналът, е достатъчно да има усилвател с
голям коефициент на усилване. Наличието в основния тракт на елементи с
невисока точност и дори с определена нелинейност на се отразява съществено
на характеристиките на регулатора.
pk
( )pе ( )pμp.Т
k
и
р
рТk др
Фиг. 1. Структурна схема на идеален ПИД-регулатор
1. Структура на регулатори с усилвателно и интегриращо звено в пра-
вия тракт, обхванати с обратна връзка
Това са регулатори, при които изпълнителният механизъм, функционал-
но представляващ интегриращо звено, е обхванат с обратна връзка (фиг. 2).
р.T1
им
( )pμ1k
( )рWов
( )pе
Фиг. 2. Структурна схема на реален регулатор
За предавателната функция на структурната схема може да се запише:
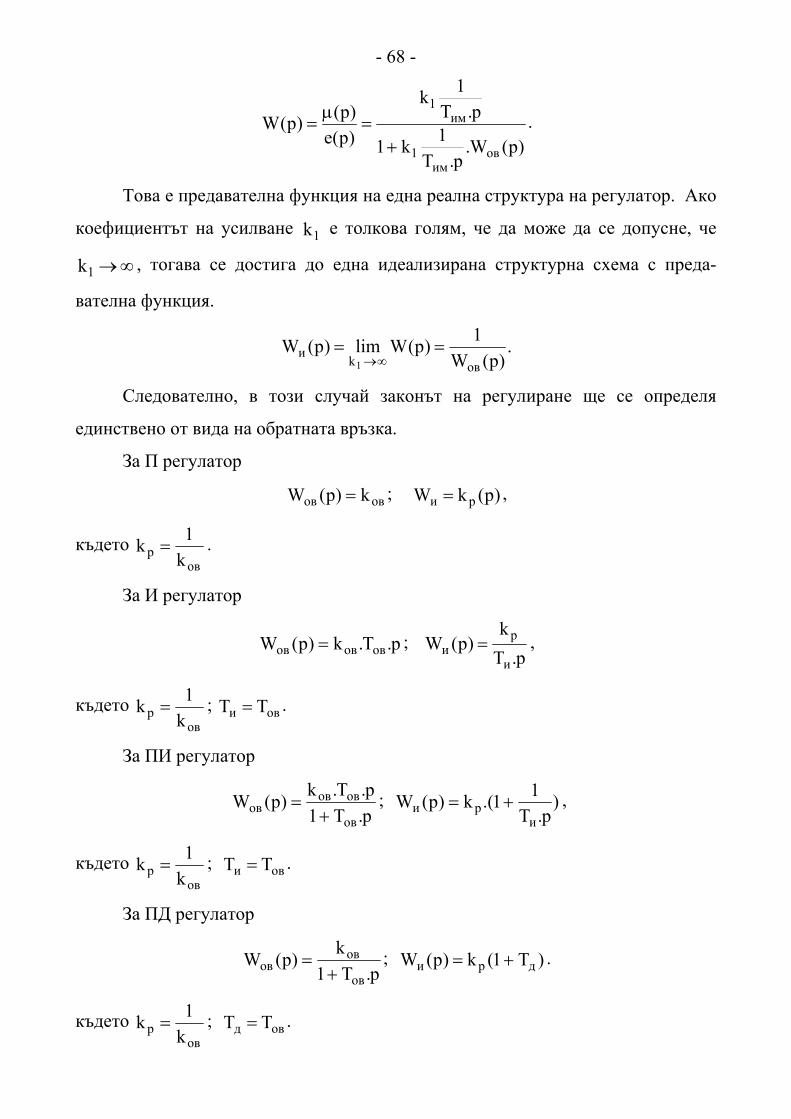
- 68 -
)p(W.p.T
1k1
p.T1k
)p(e)p()p(W
овим
1
им1
+=
μ= .
Това е предавателна функция на една реална структура на регулатор. Ако
коефициентът на усилване 1k е толкова голям, че да може да се допусне, че
∞→1k , тогава се достига до една идеализирана структурна схема с преда-
вателна функция.
.)р(W
1)p(Wlim)p(Wовkи
1==
∞→
Следователно, в този случай законът на регулиране ще се определя
единствено от вида на обратната връзка.
За П регулатор
овов k)p(W = ; )p(kW pи = ,
където ов
p k1k = .
За И регулатор
р.T.k)р(W ововов = ; р.T
k)p(W
и
pи = ,
където ов
p k1k = ; ови TT = .
За ПИ регулатор
p.T1p.T.k)p(W
oв
oвовoв +
= ; )p.T
11.(k)p(Wи
pи += ,
където ов
p k1k = ; oви TT = .
За ПД регулатор
р.T1k)р(W
oв
овoв +
= ; )T1(k)p(W дpи += .
където ов
p k1k = ; oвд TT = .
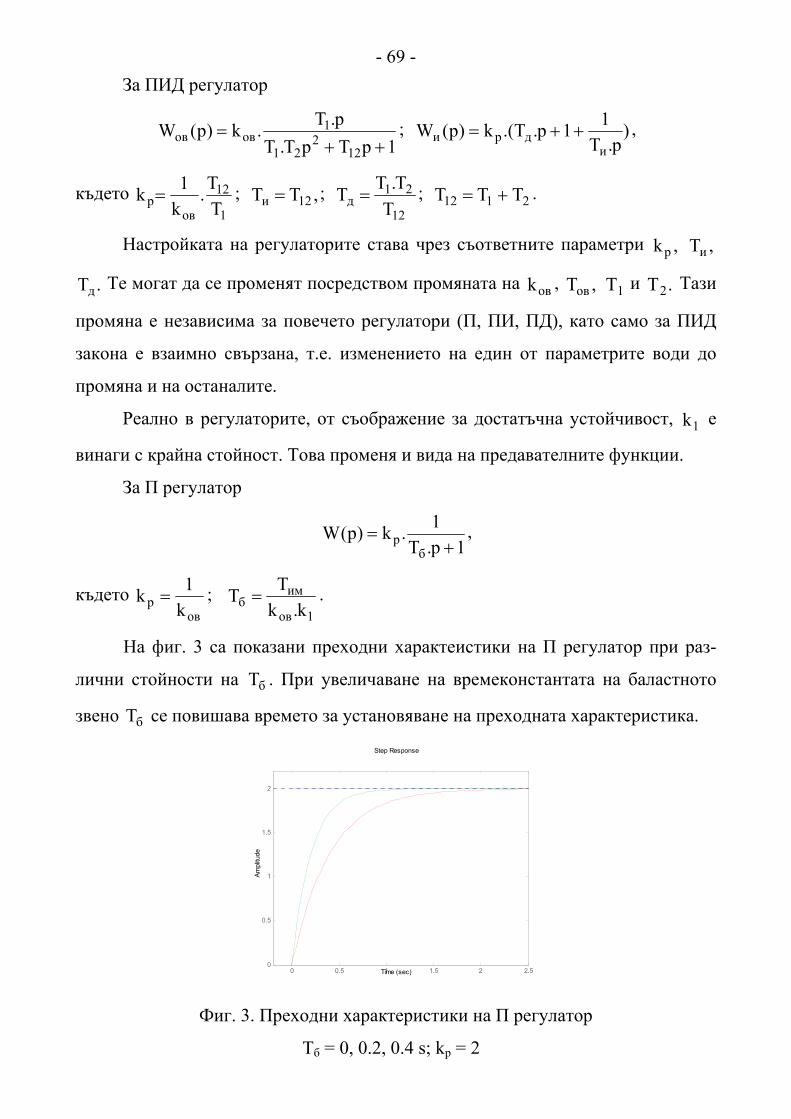
- 69 -За ПИД регулатор
1pTpT.Tp.T.k)p(W
122
21
1овoв
++= ; )
p.T11p.T.(k)p(Wи
дpи ++= ,
където 1
12
овp T
T.k1k = ; ,TT 12и = ;
12
21д T
T.TT = ; 2112 TTT += .
Настройката на регулаторите става чрез съответните параметри ,kp ,Tи
.Tд Те могат да се променят посредством промяната на овk , ,Toв 1Т и .Т2 Тази
промяна е независима за повечето регулатори (П, ПИ, ПД), като само за ПИД
закона е взаимно свързана, т.е. изменението на един от параметрите води до
промяна и на останалите.
Реално в регулаторите, от съображение за достатъчна устойчивост, 1k е
винаги с крайна стойност. Това променя и вида на предавателните функции.
За П регулатор
1p.T1.k)p(W
бp +
= ,
където ов
p k1k = ;
1ов
имб k.k
TT = .
На фиг. 3 са показани преходни характеистики на П регулатор при раз-
лични стойности на бT . При увеличаване на времеконстантата на баластното
звено бT се повишава времето за установяване на преходната характеристика.
0 0.5 1 1.5 2 2.50
0.5
1
1.5
2
Step Response
Time (sec)
Ampl
itude
Фиг. 3. Преходни характеристики на П регулатор
Тб = 0, 0.2, 0.4 s; kр = 2
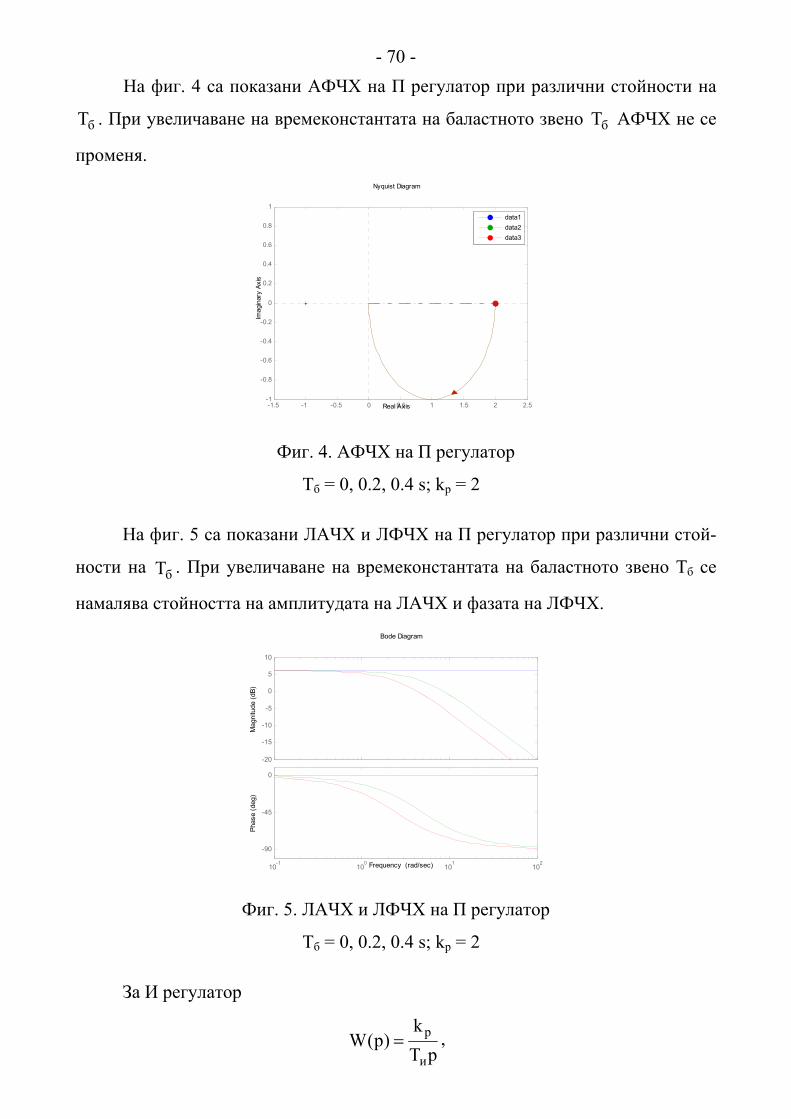
- 70 -На фиг. 4 са показани АФЧХ на П регулатор при различни стойности на
бT . При увеличаване на времеконстантата на баластното звено бT АФЧХ не се
променя.
-1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
data1data2data3
Фиг. 4. АФЧХ на П регулатор
Тб = 0, 0.2, 0.4 s; kр = 2
На фиг. 5 са показани ЛАЧХ и ЛФЧХ на П регулатор при различни стой-
ности на бT . При увеличаване на времеконстантата на баластното звено Тб се
намалява стойността на амплитудата на ЛАЧХ и фазата на ЛФЧХ.
-20
-15
-10
-5
0
5
10
Mag
nitu
de (d
B)
10-1
100
101
102
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 5. ЛАЧХ и ЛФЧХ на П регулатор
Тб = 0, 0.2, 0.4 s; kр = 2
За И регулатор
pTk
)p(Wи
p= ,
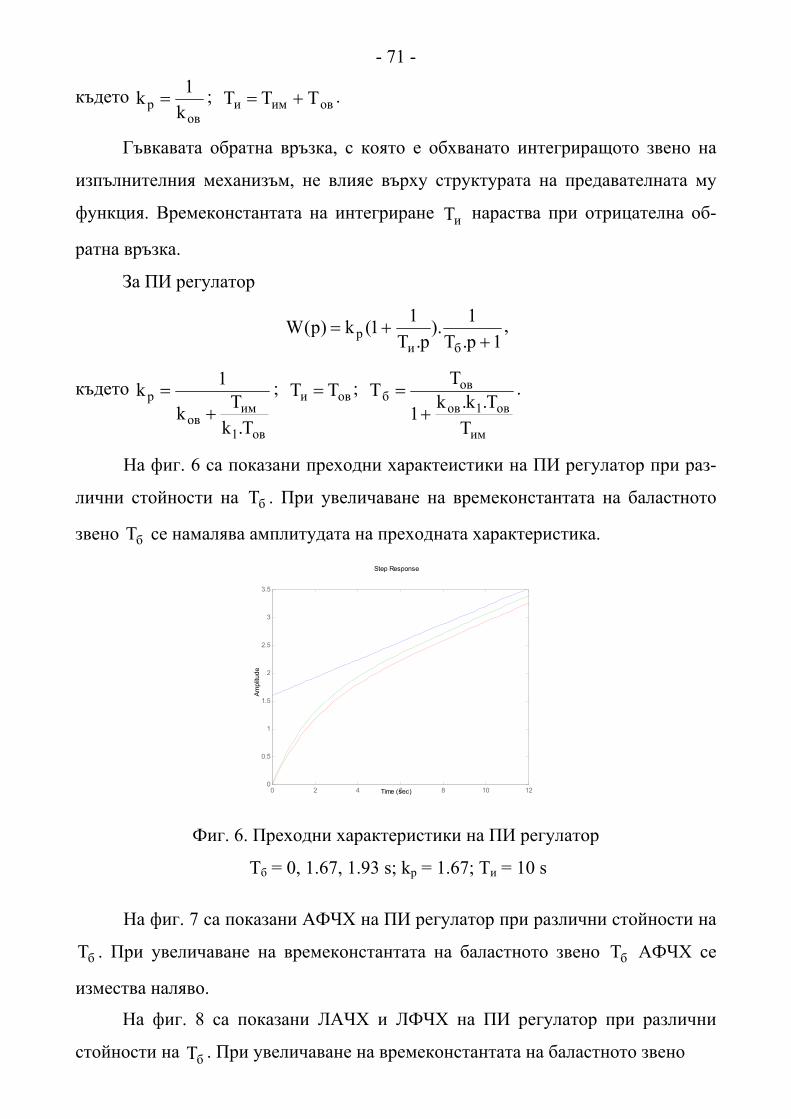
- 71 -
където ов
p k1k = ; овими ТTT += .
Гъвкавата обратна връзка, с която е обхванато интегриращото звено на
изпълнителния механизъм, не влияе върху структурата на предавателната му
функция. Времеконстантата на интегриране иT нараства при отрицателна об-
ратна връзка.
За ПИ регулатор
1p.T1).
p.T11(k)p(W
биp +
+= ,
където
oв1
имов
p
T.kTk
1k+
= ; oви TT = ;
им
oв1ов
oвб
TT.k.k1
TТ+
= .
На фиг. 6 са показани преходни характеистики на ПИ регулатор при раз-
лични стойности на бT . При увеличаване на времеконстантата на баластното
звено бT се намалява амплитудата на преходната характеристика.
0 2 4 6 8 10 120
0.5
1
1.5
2
2.5
3
3.5
Step Response
Time (sec)
Ampl
itude
Фиг. 6. Преходни характеристики на ПИ регулатор
Тб = 0, 1.67, 1.93 s; kр = 1.67; Ти = 10 s
На фиг. 7 са показани АФЧХ на ПИ регулатор при различни стойности на
бT . При увеличаване на времеконстантата на баластното звено бT АФЧХ се
измества наляво.
На фиг. 8 са показани ЛАЧХ и ЛФЧХ на ПИ регулатор при различни
стойности на бT . При увеличаване на времеконстантата на баластното звено
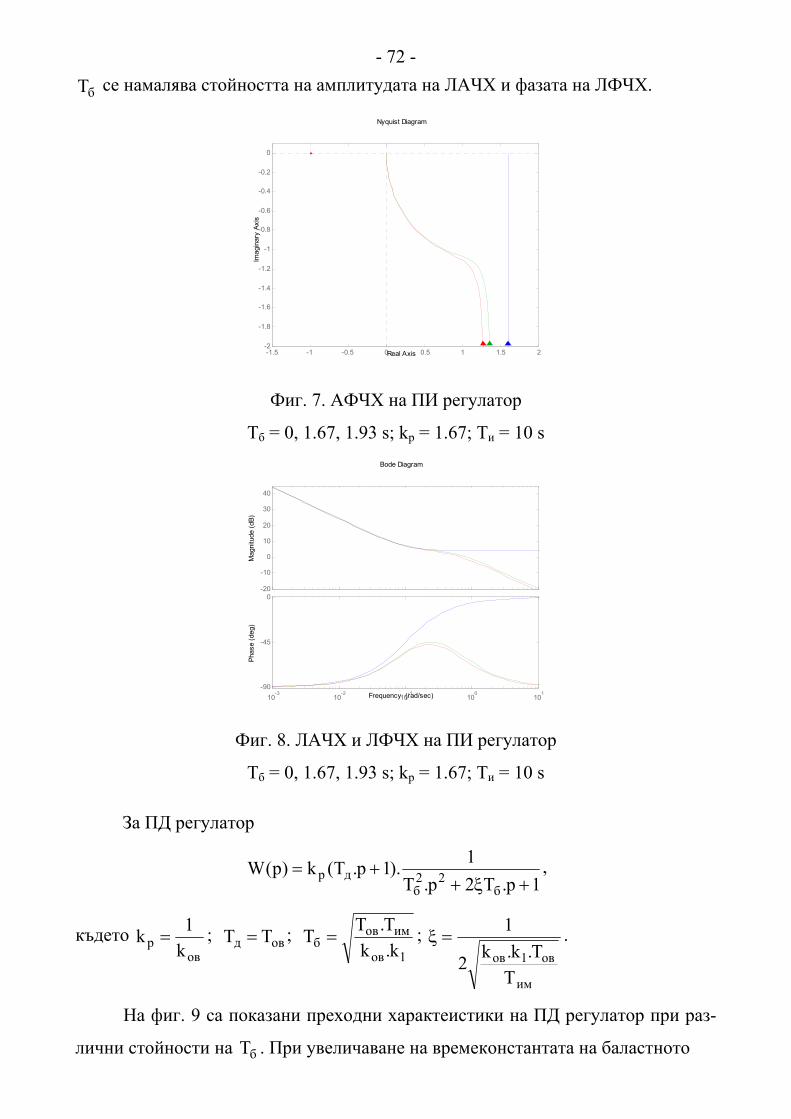
- 72 -
бT се намалява стойността на амплитудата на ЛАЧХ и фазата на ЛФЧХ.
-1.5 -1 -0.5 0 0.5 1 1.5 2-2
-1.8
-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 7. АФЧХ на ПИ регулатор
Тб = 0, 1.67, 1.93 s; kр = 1.67; Ти = 10 s
-20
-10
0
10
20
30
40
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 8. ЛАЧХ и ЛФЧХ на ПИ регулатор
Тб = 0, 1.67, 1.93 s; kр = 1.67; Ти = 10 s
За ПД регулатор
1p.T2p.T1).1p.T(k)p(W
б22
бдp
+ξ++= ,
където ов
p k1k = ; oвд TT = ;
1ов
имoвб k.k
T.TT = ;
им
oв1овТ
T.k.k2
1=ξ .
На фиг. 9 са показани преходни характеистики на ПД регулатор при раз-
лични стойности на бT . При увеличаване на времеконстантата на баластното
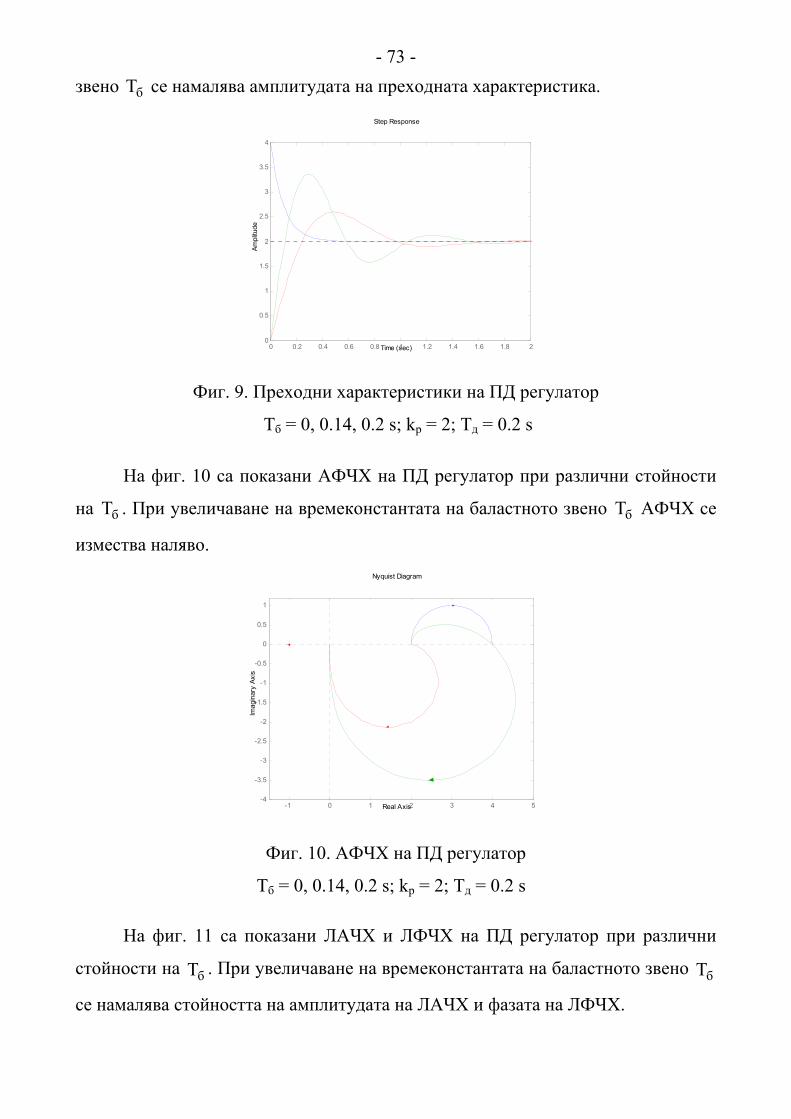
- 73 -звено бT се намалява амплитудата на преходната характеристика.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
1.5
2
2.5
3
3.5
4
Step Response
Time (sec)
Ampl
itude
Фиг. 9. Преходни характеристики на ПД регулатор
Тб = 0, 0.14, 0.2 s; kр = 2; Тд = 0.2 s
На фиг. 10 са показани АФЧХ на ПД регулатор при различни стойности
на бT . При увеличаване на времеконстантата на баластното звено бT АФЧХ се
измества наляво.
-1 0 1 2 3 4 5-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 10. АФЧХ на ПД регулатор
Тб = 0, 0.14, 0.2 s; kр = 2; Тд = 0.2 s
На фиг. 11 са показани ЛАЧХ и ЛФЧХ на ПД регулатор при различни
стойности на бT . При увеличаване на времеконстантата на баластното звено бT
се намалява стойността на амплитудата на ЛАЧХ и фазата на ЛФЧХ.
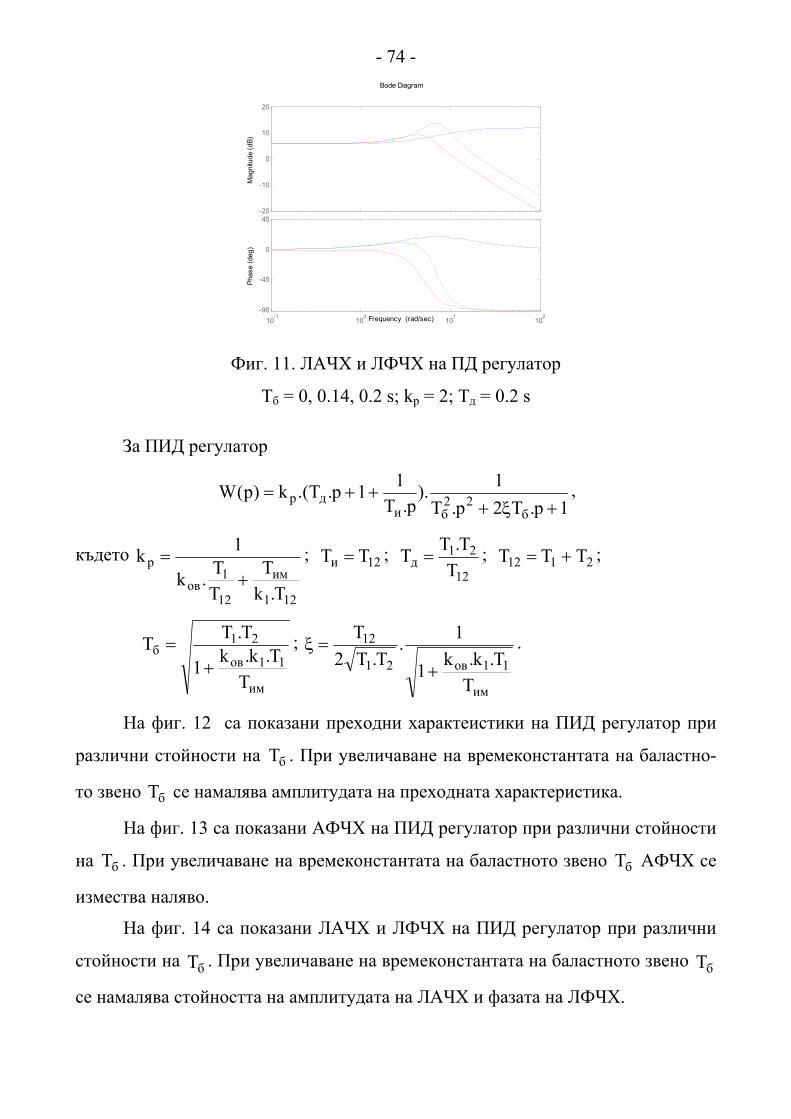
- 74 -
-20
-10
0
10
20
Mag
nitu
de (d
B)
10-1
100
101
102
-90
-45
0
45
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 11. ЛАЧХ и ЛФЧХ на ПД регулатор
Тб = 0, 0.14, 0.2 s; kр = 2; Тд = 0.2 s
За ПИД регулатор
1p.T2p.T1).
p.T11p.T.(k)p(W
б22
бидp
+ξ+++= ,
където
121
им
12
1ов
p
T.kT
TT.k
1k+
= ; 12и TT = ; 12
21д T
T.TT = ; 2112 TTT += ;
им
11ов
21б
TT.k.k1
T.TT+
= ;
им
11ов21
12
TT.k.k1
1.T.T2
T
+=ξ .
На фиг. 12 са показани преходни характеистики на ПИД регулатор при
различни стойности на бT . При увеличаване на времеконстантата на баластно-
то звено бT се намалява амплитудата на преходната характеристика.
На фиг. 13 са показани АФЧХ на ПИД регулатор при различни стойности
на бT . При увеличаване на времеконстантата на баластното звено бT АФЧХ се
измества наляво.
На фиг. 14 са показани ЛАЧХ и ЛФЧХ на ПИД регулатор при различни
стойности на бT . При увеличаване на времеконстантата на баластното звено бT
се намалява стойността на амплитудата на ЛАЧХ и фазата на ЛФЧХ.
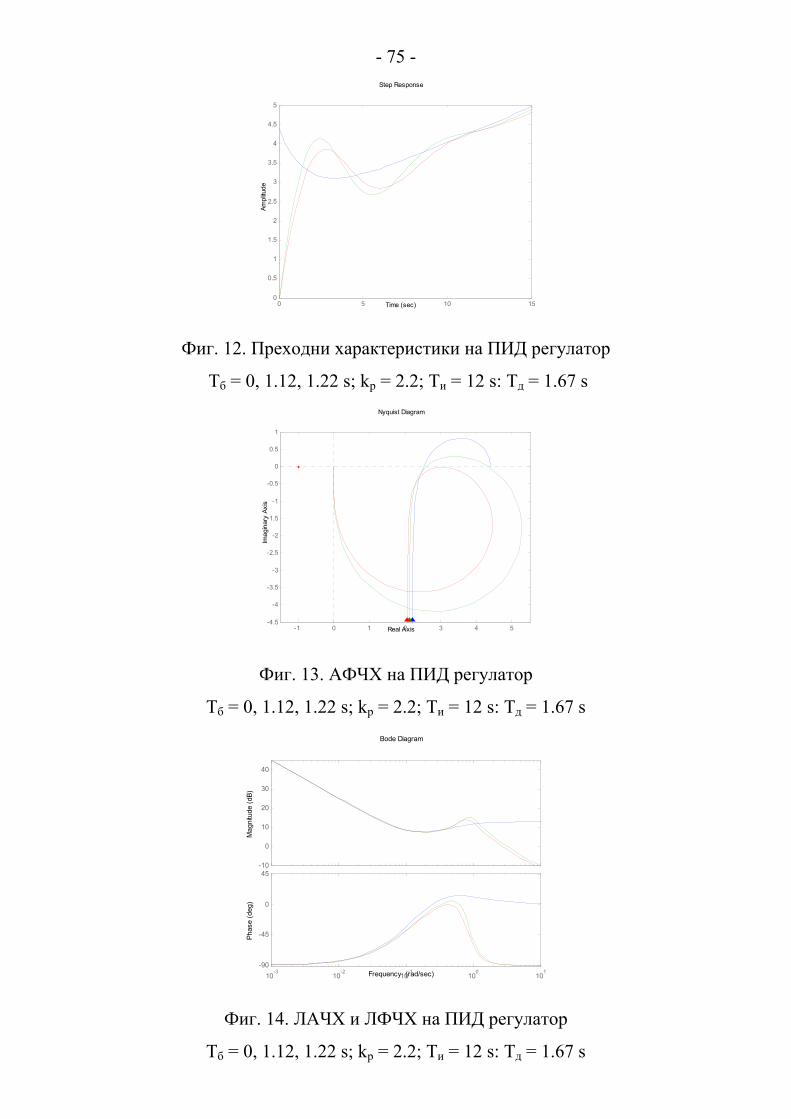
- 75 -
0 5 10 150
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Step Response
Time (sec)
Ampl
itude
Фиг. 12. Преходни характеристики на ПИД регулатор
Тб = 0, 1.12, 1.22 s; kр = 2.2; Ти = 12 s: Тд = 1.67 s
-1 0 1 2 3 4 5-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 13. АФЧХ на ПИД регулатор
Тб = 0, 1.12, 1.22 s; kр = 2.2; Ти = 12 s: Тд = 1.67 s
-10
0
10
20
30
40
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
-90
-45
0
45
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 14. ЛАЧХ и ЛФЧХ на ПИД регулатор
Тб = 0, 1.12, 1.22 s; kр = 2.2; Ти = 12 s: Тд = 1.67 s
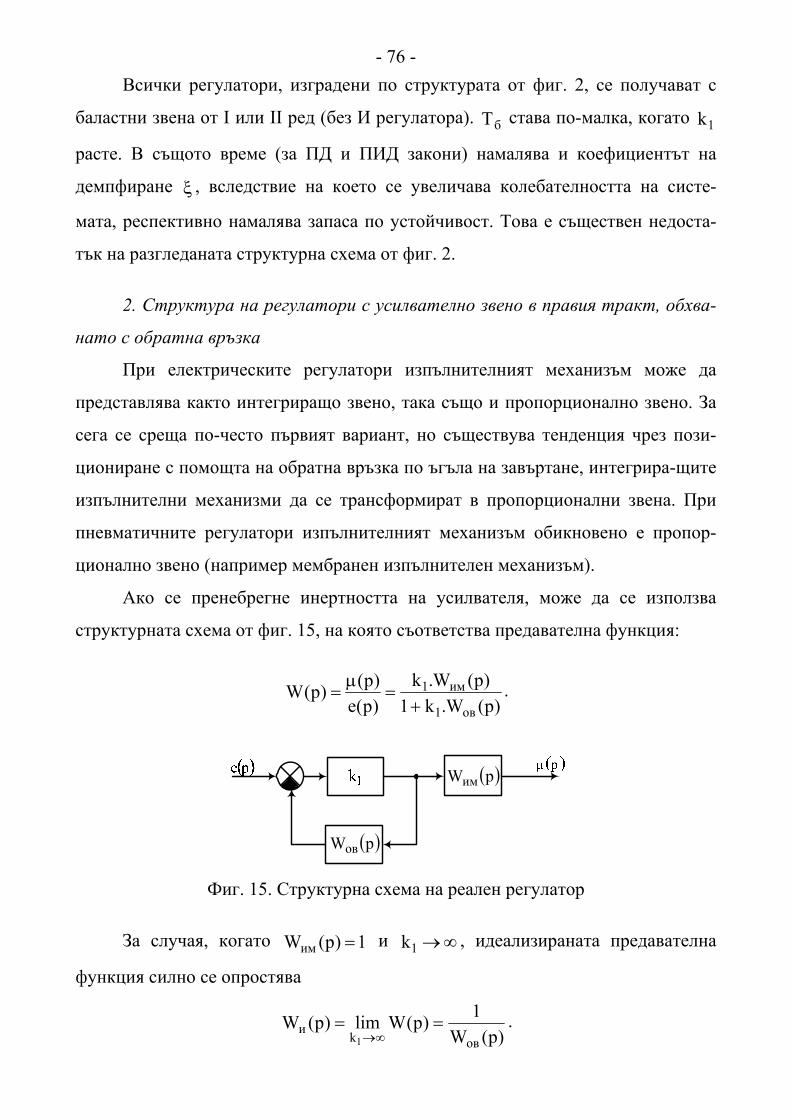
- 76 -Всички регулатори, изградени по структурата от фиг. 2, се получават с
баластни звена от I или II ред (без И регулатора). бТ става по-малка, когато 1k
расте. В същото време (за ПД и ПИД закони) намалява и коефициентът на
демпфиране ξ , вследствие на което се увеличава колебателността на систе-
мата, респективно намалява запаса по устойчивост. Това е съществен недоста-
тък на разгледаната структурна схема от фиг. 2.
2. Структура на регулатори с усилвателно звено в правия тракт, обхва-
нато с обратна връзка
При електрическите регулатори изпълнителният механизъм може да
представлява както интегриращо звено, така също и пропорционално звено. За
сега се среща по-често първият вариант, но съществува тенденция чрез пози-
циониране с помощта на обратна връзка пo ъгъла на завъртане, интегрира-щите
изпълнителни механизми да се трансформират в пропорционални звена. При
пневматичните регулатори изпълнителният механизъм обикновено е пропор-
ционално звено (например мембранен изпълнителен механизъм).
Ако се пренебрегне инертността на усилвателя, може да се използва
структурната схема от фиг. 15, на която съответства предавателна функция:
)р(W.k1)р(W.k
)p(e)p()p(W
oв1
им1+
=μ
= .
( )рWим
( )рWов
Фиг. 15. Структурна схема на реален регулатор
За случая, когато 1)р(Wим = и ∞→1k , идеализираната предавателна
функция силно се опростява
)р(W1)p(Wlim)p(W
oвkи1
==∞→
.
- 77 -Получаването на различни закони на регулиране (П, ПИ, ПД, ПИД) е ана-
логично на разглежданите случаи в предходната точка.
За реалните регулатори, когато 1k <<∞, предавателната функция е:
)p(Wk1k)p(W
oв1
1+
= .
За различните закони нa функциониране горната предавателна функция
ще има различен вид.
За реализирането на П регулатор нека предавателната функция на обрат-
ната връзка за структурната схема от фиг. 15 да бъде
овов k)p(W = .
За опростяване на разглежданията нека да се приеме, че предавателната
функция на пропорционалния изпълнителен механизъм e Wим(p) = 1. Тогава за
предавателната функция на структурната схема от фиг. 15 може да се запише
pимов1
1р k)р(W.
k.k1k)p(W =
+= .
Следователно структурната схема от фиг. 15 при пропорционален из-
пълнителен механизъм реализира предавателна функция на идеален П регу-
латор. При подходящ подбор на стойностите на коефициентите на усилване k1 и
kов могат да се получат приблизително същите стойности за коефициента на
про-порционалност kp, както при идеален П регулатор.
За реализирането на П регулатор нека предавателната функция на изпъл-
нителния механизъм от структурната схема на фиг. 15 да бъде
p.T1)p(Wим
им = .
За предавателната функция на схема от фиг. 15 може да се запише
р.Т1.k)р(W.
k.k1k)p(W
имpим
ов1
1р =
+= .
Следователно структурната схема от фиг. 15 при изпълнителен механи-
зъм, представляващ в динамично отношение интегриращо звено, не реализира
предавателна функция на П регулатор.
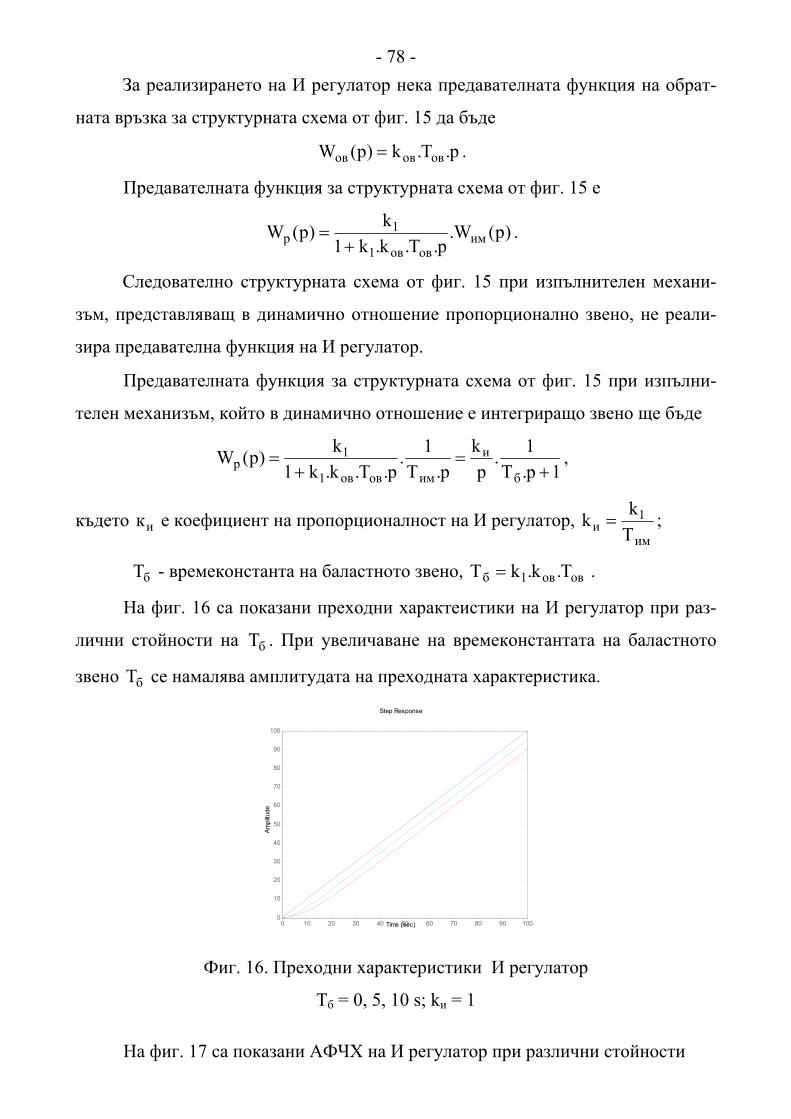
- 78 -За реализирането на И регулатор нека предавателната функция на обрат-
ната връзка за структурната схема от фиг. 15 да бъде
р.T.k)p(W ововов = .
Предавателната функция за структурната схема от фиг. 15 е
)р(W.р.T.k.k1
k)p(W имовов1
1р +
= .
Следователно структурната схема от фиг. 15 при изпълнителен механи-
зъм, представляващ в динамично отношение пропорционално звено, не реали-
зира предавателна функция на И регулатор.
Предавателната функция за структурната схема от фиг. 15 при изпълни-
телен механизъм, който в динамично отношение е интегриращо звено ще бъде
1р.Т1.
рk
р.Т1.
р.T.k.k1k)p(W
б
и
имовов1
1р +
=+
= ,
където ик е коефициент на пропорционалност на И регулатор, им
1и Т
kk = ;
бT - времеконстанта на баластното звено, овов1б T.k.kТ = .
На фиг. 16 са показани преходни характеистики на И регулатор при раз-
лични стойности на бT . При увеличаване на времеконстантата на баластното
звено бT се намалява амплитудата на преходната характеристика.
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100
Step Response
Time (sec)
Ampl
itude
Фиг. 16. Преходни характеристики И регулатор
Тб = 0, 5, 10 s; kи = 1
На фиг. 17 са показани АФЧХ на И регулатор при различни стойности
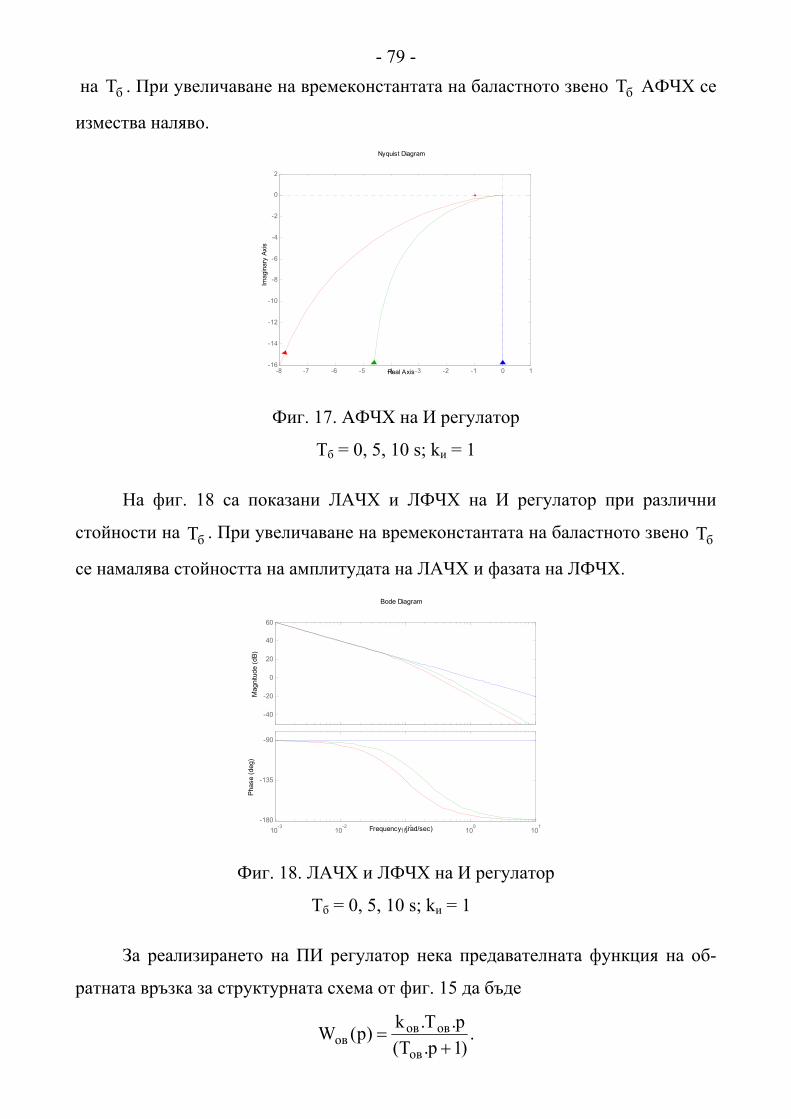
- 79 - на бT . При увеличаване на времеконстантата на баластното звено бT АФЧХ се
измества наляво.
-8 -7 -6 -5 -4 -3 -2 -1 0 1-16
-14
-12
-10
-8
-6
-4
-2
0
2
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 17. АФЧХ на И регулатор
Тб = 0, 5, 10 s; kи = 1
На фиг. 18 са показани ЛАЧХ и ЛФЧХ на И регулатор при различни
стойности на бT . При увеличаване на времеконстантата на баластното звено бT
се намалява стойността на амплитудата на ЛАЧХ и фазата на ЛФЧХ.
-40
-20
0
20
40
60
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
-180
-135
-90
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 18. ЛАЧХ и ЛФЧХ на И регулатор
Тб = 0, 5, 10 s; kи = 1
За реализирането на ПИ регулатор нека предавателната функция на об-
ратната връзка за структурната схема от фиг. 15 да бъде
.)1p.T(р.Т.k)p(W
ов
ововов +
=
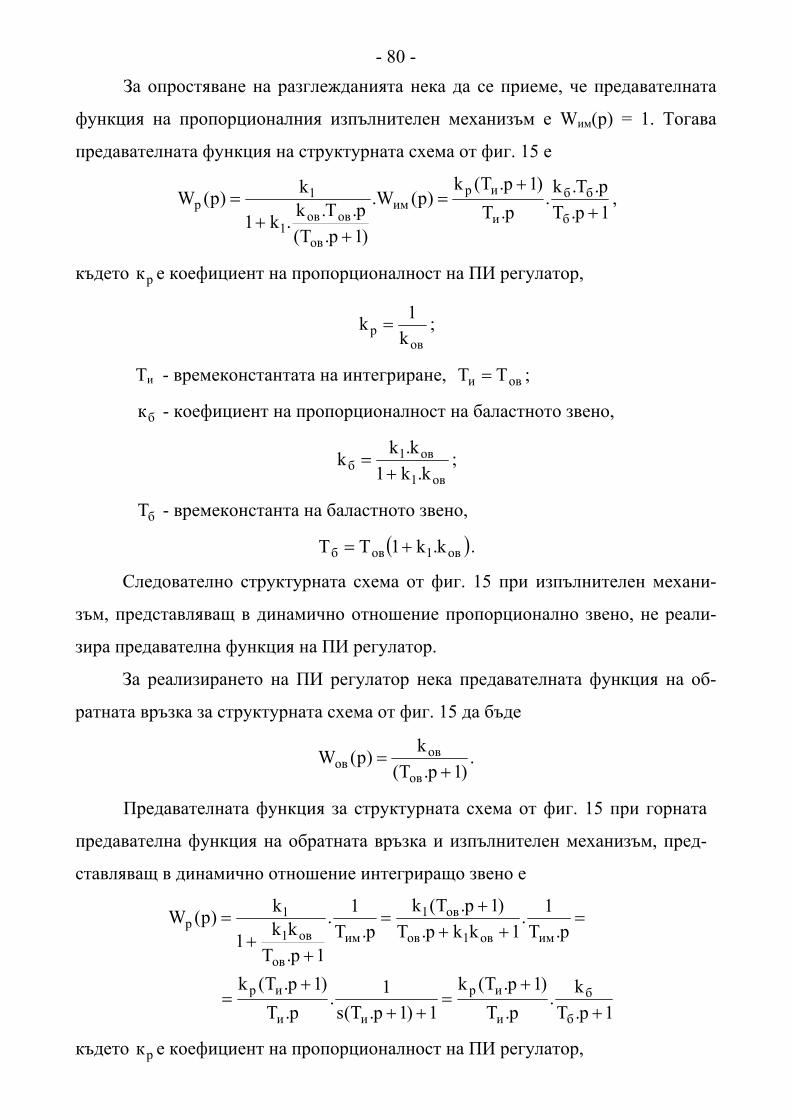
- 80 -За опростяване на разглежданията нека да се приеме, че предавателната
функция на пропорционалния изпълнителен механизъм e Wим(p) = 1. Тогава
предавателната функция на структурната схема от фиг. 15 е
1p.Tp.T.k.
p.T)1p.T(k
)р(W.
)1p.T(р.Т.k.k1
k)p(Wб
бб
и
иpим
ов
овов1
1р +
+=
++
= ,
където рк е коефициент на пропорционалност на ПИ регулатор,
овр k
1k = ;
Ти - времеконстантата на интегриране, ови ТT = ;
бк - коефициент на пропорционалност на баластното звено,
ов1
ов1б k.k1
k.kk+
= ;
бT - времеконстанта на баластното звено,
( )ов1овб k.k1ТТ += .
Следователно структурната схема от фиг. 15 при изпълнителен механи-
зъм, представляващ в динамично отношение пропорционално звено, не реали-
зира предавателна функция на ПИ регулатор.
За реализирането на ПИ регулатор нека предавателната функция на об-
ратната връзка за структурната схема от фиг. 15 да бъде
.)1p.T(
k)p(Wов
овов +
=
Предавателната функция за структурната схема от фиг. 15 при горната
предавателна функция на обратната връзка и изпълнителен механизъм, пред-
ставляващ в динамично отношение интегриращо звено е
1p.Tk.
p.T)1p.T(k
1)1p.T(s1.
p.T)1p.T(k
p.T1.
1kkp.T)1p.T(k
p.T1.
1p.Tkk1
k)p(W
б
б
и
иp
ии
иp
имов1ов
ов1
им
ов
ов1
1p
+
+=
++
+=
=++
+=
++
=
където рк е коефициент на пропорционалност на ПИ регулатор,
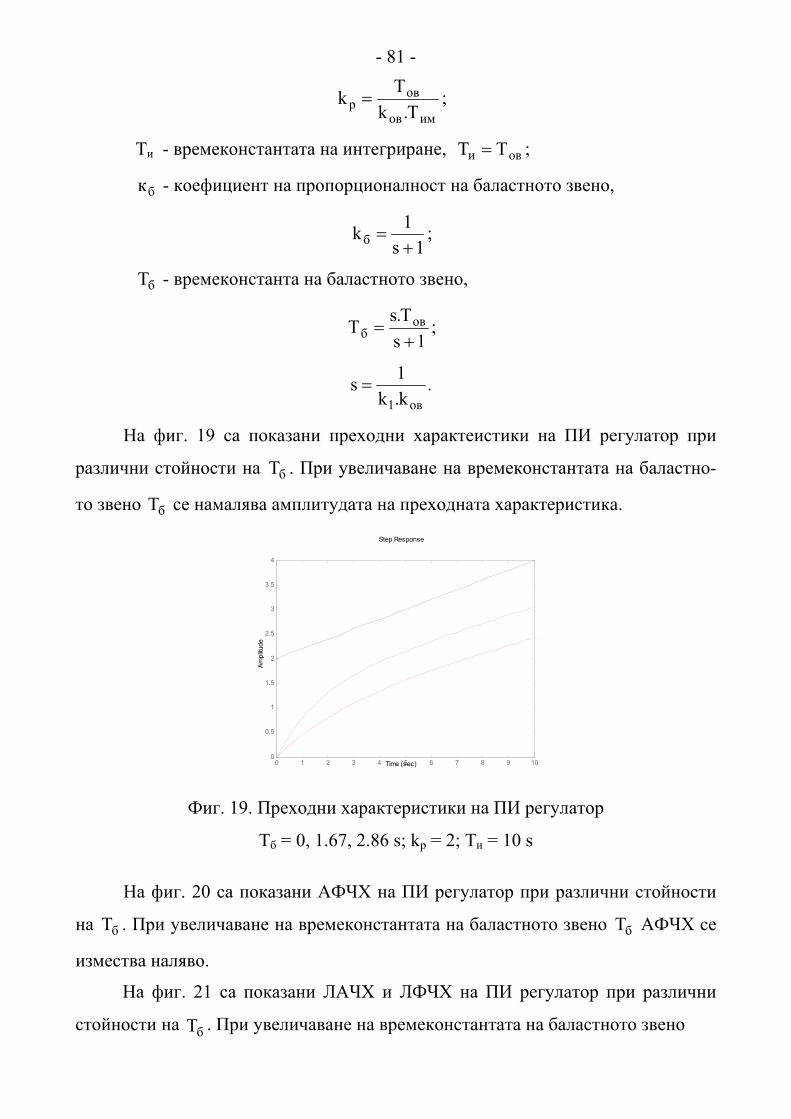
- 81 -
имов
овр Т.k
Тk = ;
Ти - времеконстантата на интегриране, ови ТT = ;
бк - коефициент на пропорционалност на баластното звено,
1s1kб +
= ;
бT - времеконстанта на баластното звено,
1sТ.sТ ов
б += ;
.k.k1sов1
=
На фиг. 19 са показани преходни характеистики на ПИ регулатор при
различни стойности на бT . При увеличаване на времеконстантата на баластно-
то звено бT се намалява амплитудата на преходната характеристика.
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
3.5
4
Step Response
Time (sec)
Ampl
itude
Фиг. 19. Преходни характеристики на ПИ регулатор
Тб = 0, 1.67, 2.86 s; kр = 2; Ти = 10 s
На фиг. 20 са показани АФЧХ на ПИ регулатор при различни стойности
на бT . При увеличаване на времеконстантата на баластното звено бT АФЧХ се
измества наляво.
На фиг. 21 са показани ЛАЧХ и ЛФЧХ на ПИ регулатор при различни
стойности на бT . При увеличаване на времеконстантата на баластното звено
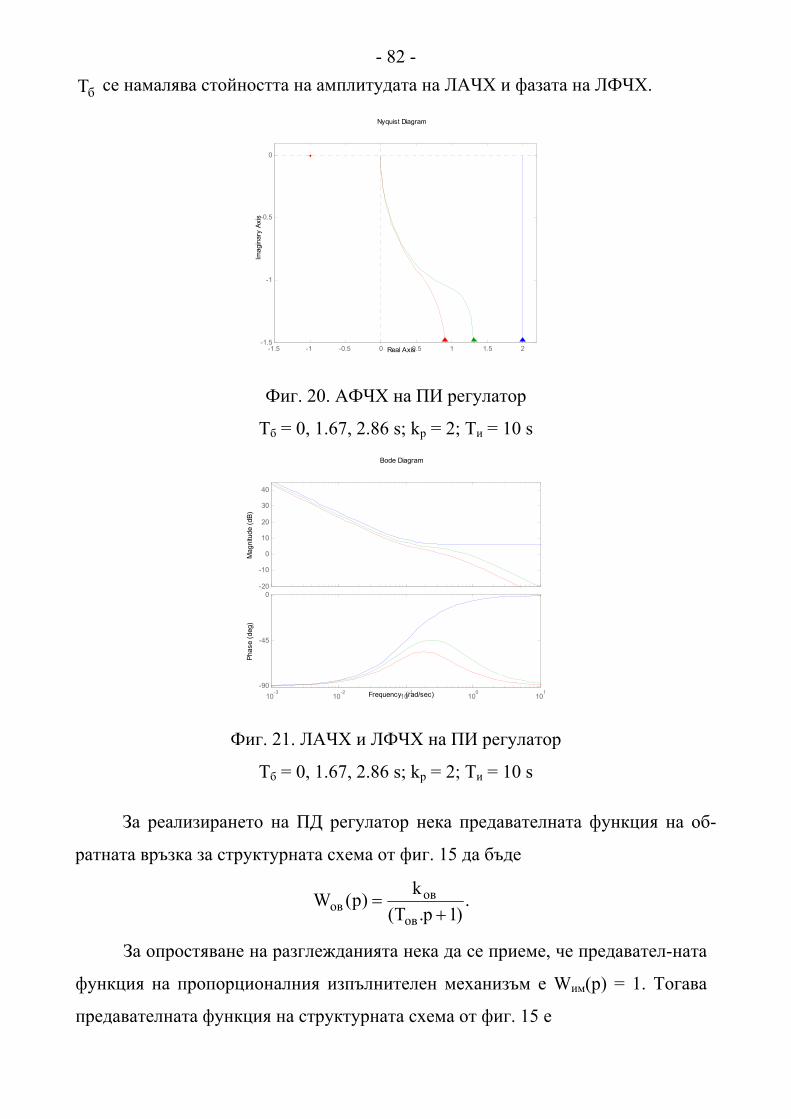
- 82 -
бT се намалява стойността на амплитудата на ЛАЧХ и фазата на ЛФЧХ.
-1.5 -1 -0.5 0 0.5 1 1.5 2-1.5
-1
-0.5
0
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 20. АФЧХ на ПИ регулатор
Тб = 0, 1.67, 2.86 s; kр = 2; Ти = 10 s
-20
-10
0
10
20
30
40
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 21. ЛАЧХ и ЛФЧХ на ПИ регулатор
Тб = 0, 1.67, 2.86 s; kр = 2; Ти = 10 s
За реализирането на ПД регулатор нека предавателната функция на об-
ратната връзка за структурната схема от фиг. 15 да бъде
.)1p.T(
k)p(Wов
овов +
=
За опростяване на разглежданията нека да се приеме, че предавател-ната
функция на пропорционалния изпълнителен механизъм e Wим(p) = 1. Тогава
предавателната функция на структурната схема от фиг. 15 е
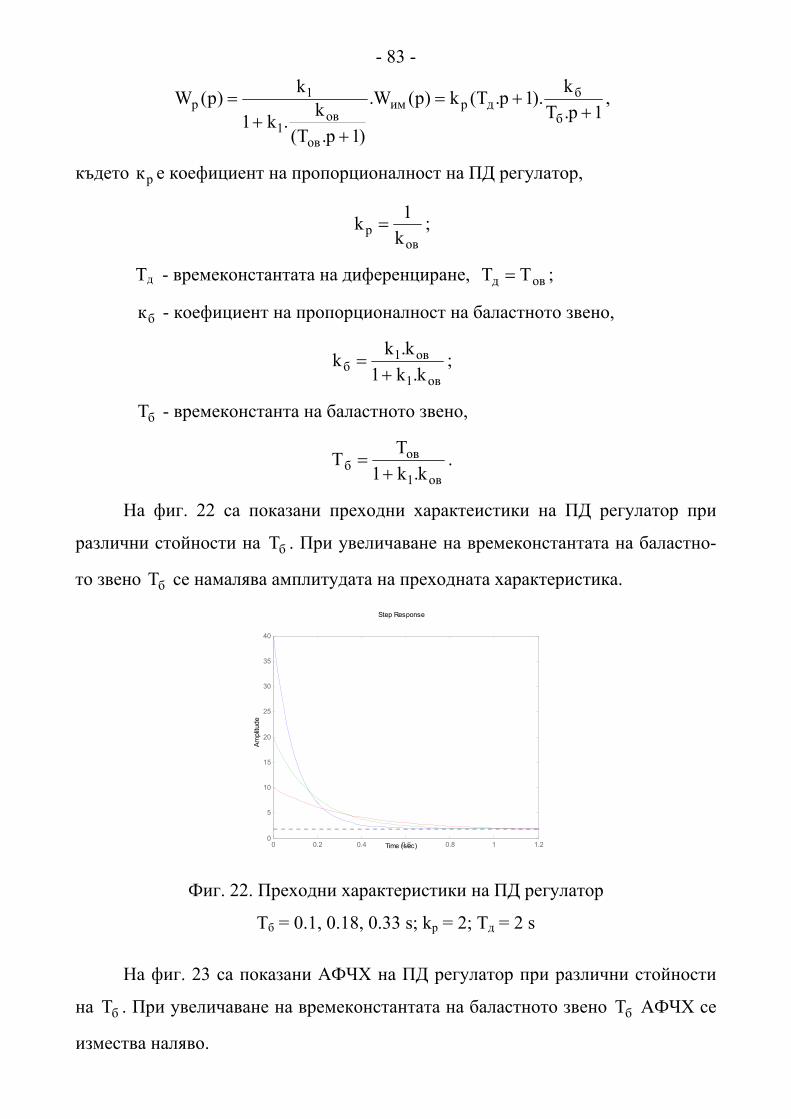
- 83 -
1p.Tk).1p.T(k)р(W.
)1p.T(k.k1
k)p(Wб
бдpим
ов
ов1
1р +
+=
++
= ,
където рк е коефициент на пропорционалност на ПД регулатор,
овр k
1k = ;
Тд - времеконстантата на диференциране, овд ТT = ;
бк - коефициент на пропорционалност на баластното звено,
ов1
ов1б k.k1
k.kk+
= ;
бT - времеконстанта на баластното звено,
ов1
овб k.k1
TТ+
= .
На фиг. 22 са показани преходни характеистики на ПД регулатор при
различни стойности на бT . При увеличаване на времеконстантата на баластно-
то звено бT се намалява амплитудата на преходната характеристика.
0 0.2 0.4 0.6 0.8 1 1.20
5
10
15
20
25
30
35
40
Step Response
Time (sec)
Ampl
itude
Фиг. 22. Преходни характеристики на ПД регулатор
Тб = 0.1, 0.18, 0.33 s; kр = 2; Тд = 2 s
На фиг. 23 са показани АФЧХ на ПД регулатор при различни стойности
на бT . При увеличаване на времеконстантата на баластното звено бT АФЧХ се
измества наляво.
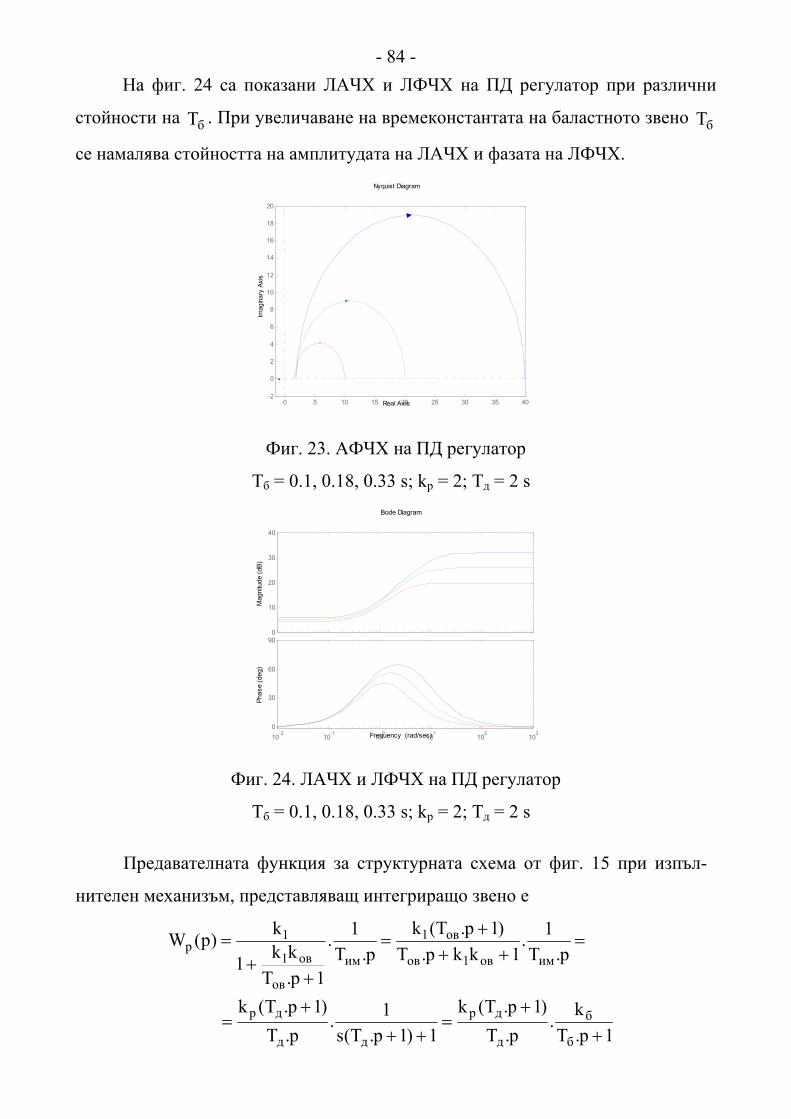
- 84 -На фиг. 24 са показани ЛАЧХ и ЛФЧХ на ПД регулатор при различни
стойности на бT . При увеличаване на времеконстантата на баластното звено бT
се намалява стойността на амплитудата на ЛАЧХ и фазата на ЛФЧХ.
0 5 10 15 20 25 30 35 40-2
0
2
4
6
8
10
12
14
16
18
20
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 23. АФЧХ на ПД регулатор
Тб = 0.1, 0.18, 0.33 s; kр = 2; Тд = 2 s
0
10
20
30
40
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
103
0
30
60
90
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 24. ЛАЧХ и ЛФЧХ на ПД регулатор
Тб = 0.1, 0.18, 0.33 s; kр = 2; Тд = 2 s
Предавателната функция за структурната схема от фиг. 15 при изпъл-
нителен механизъм, представляващ интегриращо звено е
1p.Tk.
p.T)1p.T(k
1)1p.T(s1.
p.T)1p.T(k
p.T1.
1kkp.T)1p.T(k
p.T1.
1p.Tkk1
k)p(W
б
б
д
дp
дд
дp
имов1ов
ов1
им
ов
ов1
1p
+
+=
++
+=
=++
+=
++
=
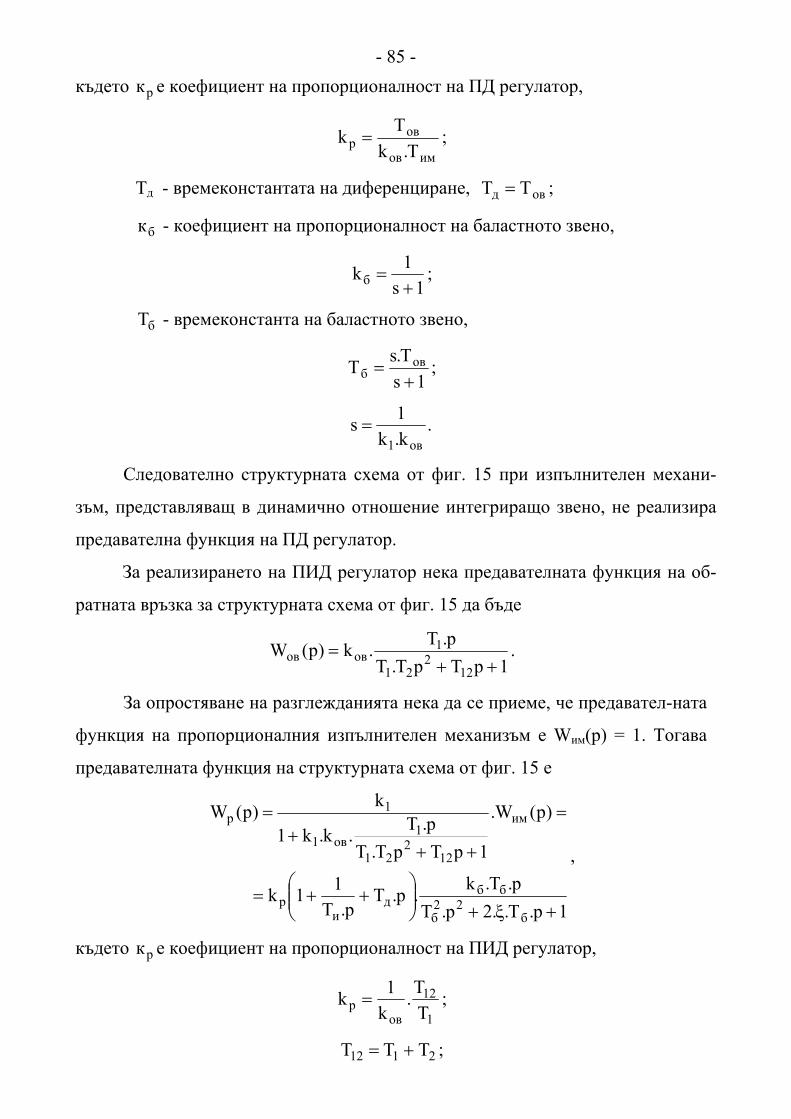
- 85 -където рк е коефициент на пропорционалност на ПД регулатор,
имов
овр Т.k
Тk = ;
Тд - времеконстантата на диференциране, овд ТT = ;
бк - коефициент на пропорционалност на баластното звено,
1s1kб +
= ;
бT - времеконстанта на баластното звено,
1sТ.sТ ов
б += ;
.k.k1sов1
=
Следователно структурната схема от фиг. 15 при изпълнителен механи-
зъм, представляващ в динамично отношение интегриращо звено, не реализира
предавателна функция на ПД регулатор.
За реализирането на ПИД регулатор нека предавателната функция на об-
ратната връзка за структурната схема от фиг. 15 да бъде
1pTpT.Tp.T.k)p(W
122
21
1овoв
++= .
За опростяване на разглежданията нека да се приеме, че предавател-ната
функция на пропорционалния изпълнителен механизъм e Wим(p) = 1. Тогава
предавателната функция на структурната схема от фиг. 15 е
1р.Т..2p.Tp.T.k.p.T
p.T11k
)р(W.
1pTpT.Tp.T.k.k1
k)p(W
б22
б
ббд
иp
им
122
21
1ов1
1p
+ξ+⎟⎟⎠
⎞⎜⎜⎝
⎛++=
=
+++
=
,
където рк е коефициент на пропорционалност на ПИД регулатор,
1
12
овp T
T.k1k = ;
2112 TTT += ;

- 86 - Ти - времеконстантата на интегриране, 12и ТT = ;
Тд - времеконстанта на диференциране,
12
21д T
T.TT = ;
бк - коефициент на пропорционалност на баластното звено,
2
11овб T
Tk.kk = ;
бT - времеконстанта на баластното звено,
21б T.TT = ;
ξ - коефициент на затихване,
21
11ов12
T.TT.k.kT.
21 +
=ξ .
На фиг. 25 са показани преходни характеистики на ПИД регулатор при
различни стойности на бT . При увеличаване на времеконстантата на баластно-
то звено бT се намалява амплитудата на преходната характеристика.
0 5 10 15 20 25 30 350
20
40
60
80
100
120
Step Response
Time (sec)
Ampl
itude
Фиг. 25. Преходни характеристики на ПИД регулатор
Тб = 0, 3.16, 4.47 s; kр = 26; Ти = 10 s: Тд = 1.5 s
На фиг. 26 са показани АФЧХ на ПИД регулатор при различни стойнос-
ти на бT . При увеличаване на времеконстантата на баластното звено бT АФЧХ
се измества наляво.
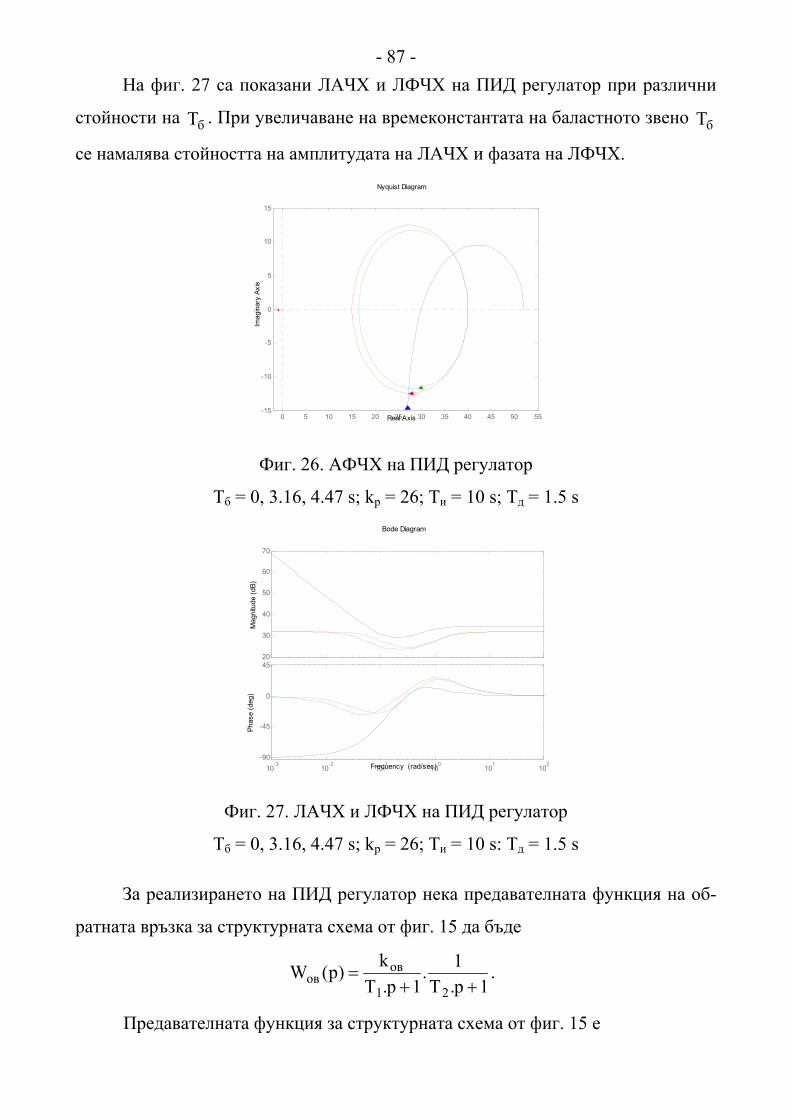
- 87 -На фиг. 27 са показани ЛАЧХ и ЛФЧХ на ПИД регулатор при различни
стойности на бT . При увеличаване на времеконстантата на баластното звено бT
се намалява стойността на амплитудата на ЛАЧХ и фазата на ЛФЧХ.
0 5 10 15 20 25 30 35 40 45 50 55-15
-10
-5
0
5
10
15
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 26. АФЧХ на ПИД регулатор
Тб = 0, 3.16, 4.47 s; kр = 26; Ти = 10 s; Тд = 1.5 s
20
30
40
50
60
70
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
102
-90
-45
0
45
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 27. ЛАЧХ и ЛФЧХ на ПИД регулатор
Тб = 0, 3.16, 4.47 s; kр = 26; Ти = 10 s: Тд = 1.5 s
За реализирането на ПИД регулатор нека предавателната функция на об-
ратната връзка за структурната схема от фиг. 15 да бъде
1р.Т1.
1р.Тk)р(W
21
овoв ++
= .
Предавателната функция за структурната схема от фиг. 15 е
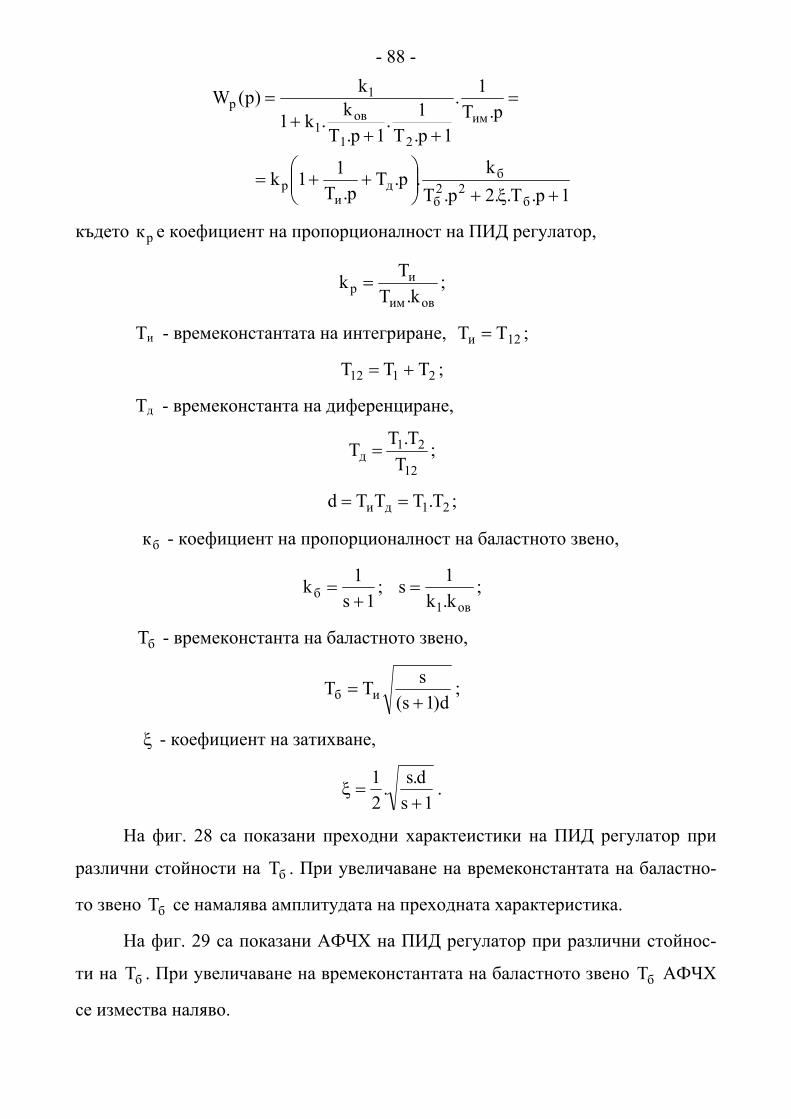
- 88 -
1р.Т..2p.Tk.p.T
p.T11k
p.T1.
1р.Т1.
1р.Тk.k1
k)p(W
б22
б
бд
иp
им
21
ов1
1p
+ξ+⎟⎟⎠
⎞⎜⎜⎝
⎛++=
=
+++
=
където рк е коефициент на пропорционалност на ПИД регулатор,
овим
иp k.T
Tk = ;
Ти - времеконстантата на интегриране, 12и ТT = ;
2112 TTT += ;
Тд - времеконстанта на диференциране,
12
21д T
T.TT = ;
21ди T.TTTd == ;
бк - коефициент на пропорционалност на баластното звено,
1s1kб +
= ; ов1 k.k
1s = ;
бT - времеконстанта на баластното звено,
d)1s(sTT иб +
= ;
ξ - коефициент на затихване,
1sd.s.
21
+=ξ .
На фиг. 28 са показани преходни характеистики на ПИД регулатор при
различни стойности на бT . При увеличаване на времеконстантата на баластно-
то звено бT се намалява амплитудата на преходната характеристика.
На фиг. 29 са показани АФЧХ на ПИД регулатор при различни стойнос-
ти на бT . При увеличаване на времеконстантата на баластното звено бT АФЧХ
се измества наляво.
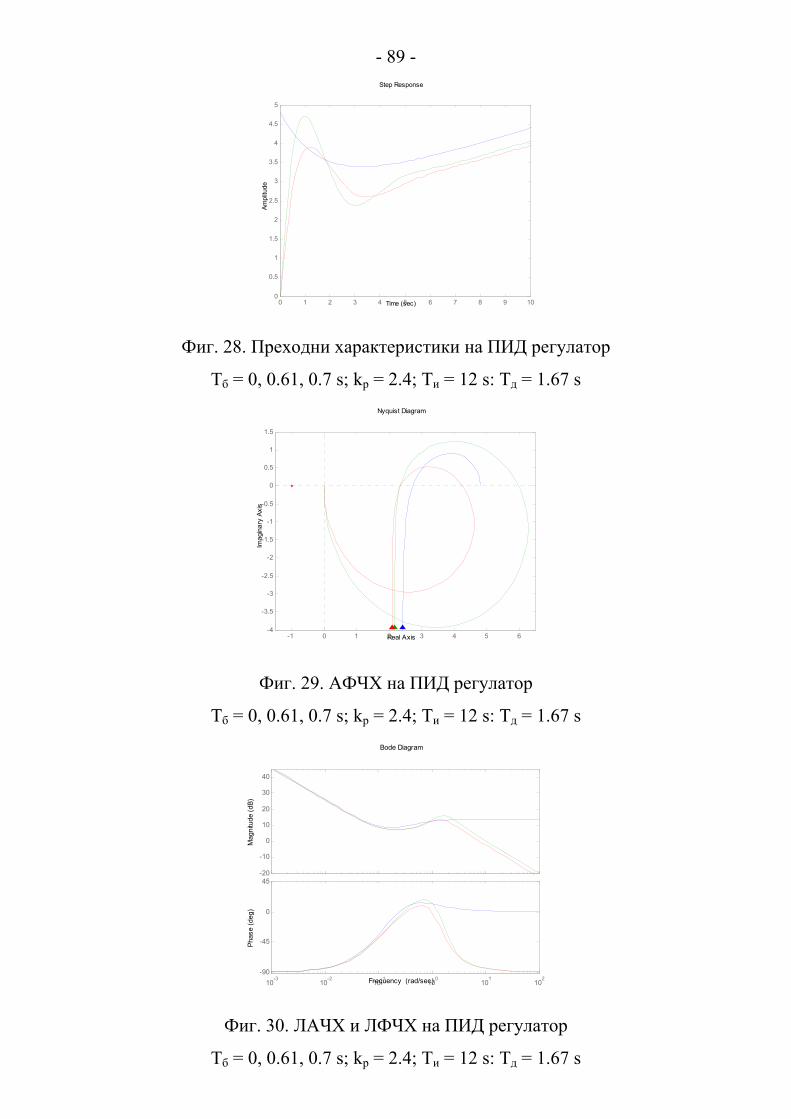
- 89 -
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Step Response
Time (sec)
Ampl
itude
Фиг. 28. Преходни характеристики на ПИД регулатор
Тб = 0, 0.61, 0.7 s; kр = 2.4; Ти = 12 s: Тд = 1.67 s
-1 0 1 2 3 4 5 6-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Фиг. 29. АФЧХ на ПИД регулатор
Тб = 0, 0.61, 0.7 s; kр = 2.4; Ти = 12 s: Тд = 1.67 s
-20
-10
0
10
20
30
40
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
102
-90
-45
0
45
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Фиг. 30. ЛАЧХ и ЛФЧХ на ПИД регулатор
Тб = 0, 0.61, 0.7 s; kр = 2.4; Ти = 12 s: Тд = 1.67 s
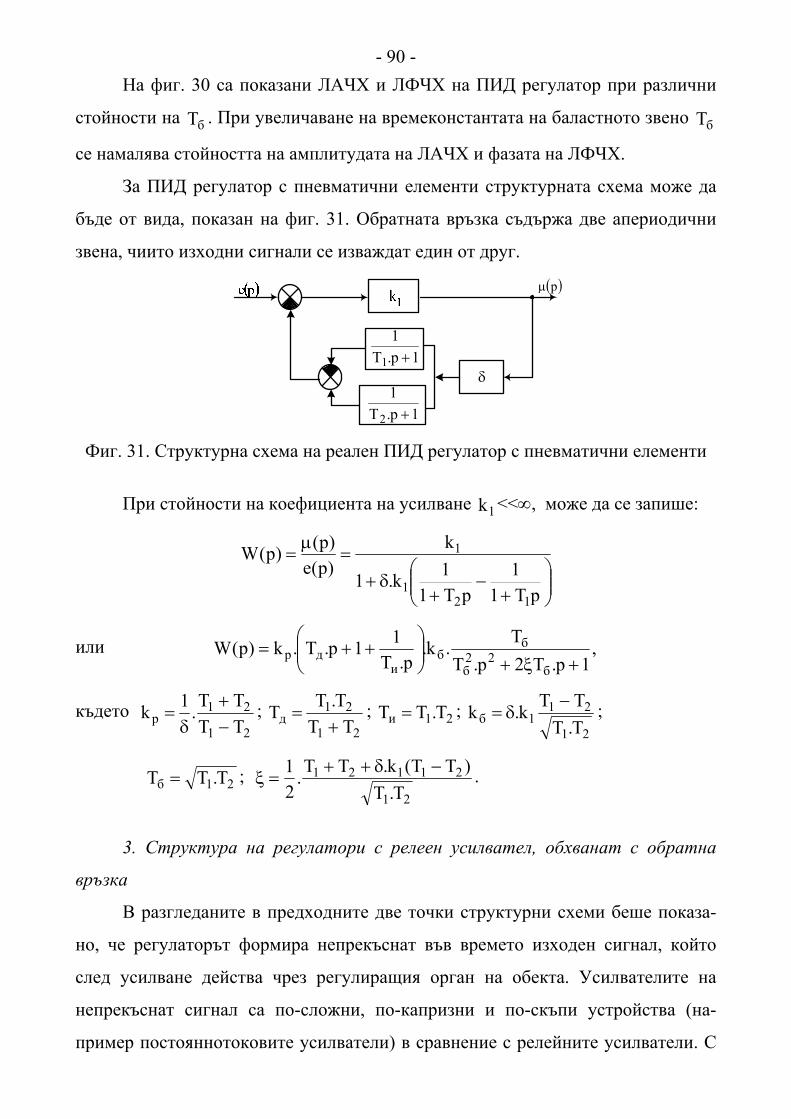
- 90 -На фиг. 30 са показани ЛАЧХ и ЛФЧХ на ПИД регулатор при различни
стойности на бT . При увеличаване на времеконстантата на баластното звено бT
се намалява стойността на амплитудата на ЛАЧХ и фазата на ЛФЧХ.
За ПИД регулатор с пневматични елементи структурната схема може да
бъде от вида, показан на фиг. 31. Обратната връзка съдържа две апериодични
звена, чиито изходни сигнали се изваждат един от друг.
( )рμ
1р.Т1
1 +
1р.Т1
2 +
δ
Фиг. 31. Структурна схема на реален ПИД регулатор с пневматични елементи
При стойности на коефициента на усилване 1k <<∞, може да се запише:
⎟⎟⎠
⎞⎜⎜⎝
⎛+
−+
δ+=
μ=
pT11
pT11k.1
k)p(e)p()p(W
121
1
или ,1p.T2p.T
T.k.p.T
11p.T.k)p(Wб
22б
бб
идp
+ξ+⎟⎟⎠
⎞⎜⎜⎝
⎛++=
където 21
21p TT
TT.1k−+
δ= ;
21
21д TT
T.TT+
= ; 21и T.TT = ; 21
211б T.T
TTk.k −δ= ;
21б T.TT = ; 21
21121
T.T)TT(k.TT.
21 −δ++
=ξ .
3. Структура на регулатори с релеен усилвател, обхванат с обратна
връзка
В разгледаните в предходните две точки структурни схеми беше показа-
но, че регулаторът формира непрекъснат във времето изходен сигнал, който
след усилване действа чрез регулиращия орган на обекта. Усилвателите на
непрекъснат сигнал са по-сложни, по-капризни и по-скъпи устройства (на-
пример постояннотоковите усилватели) в сравнение с релейните усилватели. С
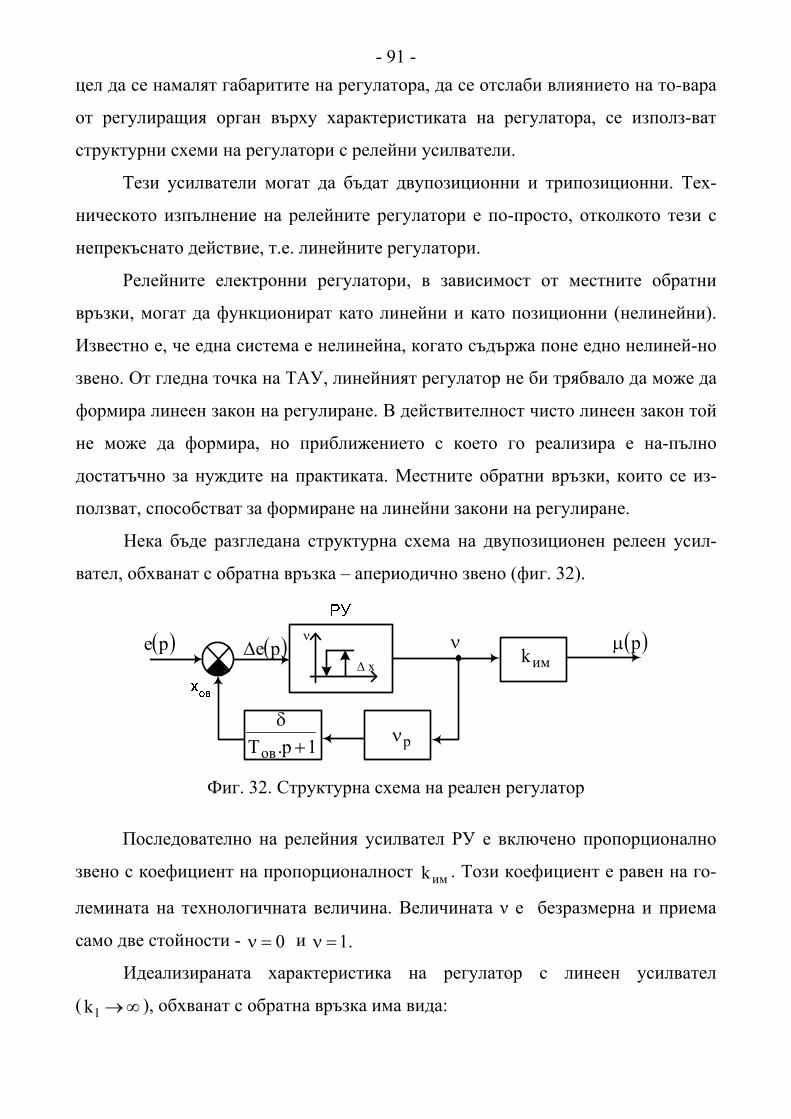
- 91 -цел да се намалят габаритите на регулатора, да се отслаби влиянието на то-вара
от регулиращия орган върху характеристиката на регулатора, се използ-ват
структурни схеми на регулатори с релейни усилватели.
Тези усилватели могат да бъдат двупозиционни и трипозиционни. Тех-
ническото изпълнение на релейните регулатори е по-просто, отколкото тези с
непрекъснато действие, т.е. линейните регулатори.
Релейните електронни регулатори, в зависимост от местните обратни
връзки, могат да функционират като линейни и като позиционни (нелинейни).
Известно е, че една система е нелинейна, когато съдържа поне едно нелиней-но
звено. От гледна точка на ТАУ, линейният регулатор не би трябвало да може да
формира линеен закон на регулиране. В действителност чисто линеен закон той
не може да формира, но приближението с което го реализира е на-пълно
достатъчно за нуждите на практиката. Местните обратни връзки, които се из-
ползват, способстват за формиране на линейни закони на регулиране.
Нека бъде разгледана структурна схема на двупозиционен релеен усил-
вател, обхванат с обратна връзка – апериодично звено (фиг. 32).
имk( )pμ( )pе
1р.Тов +δ
рν
ν( )реΔхΔ
ν
Фиг. 32. Структурна схема на реален регулатор
Последователно на релейния усилвател РУ е включено пропорционално
звено с коефициент на пропорционалност имk . Този коефициент е равен на го-
лемината на технологичната величина. Величината ν е безразмерна и приема
само две стойности - 0=ν и .1=ν
Идеализираната характеристика на регулатор с линеен усилвател
( ∞→1k ), обхванат с обратна връзка има вида:
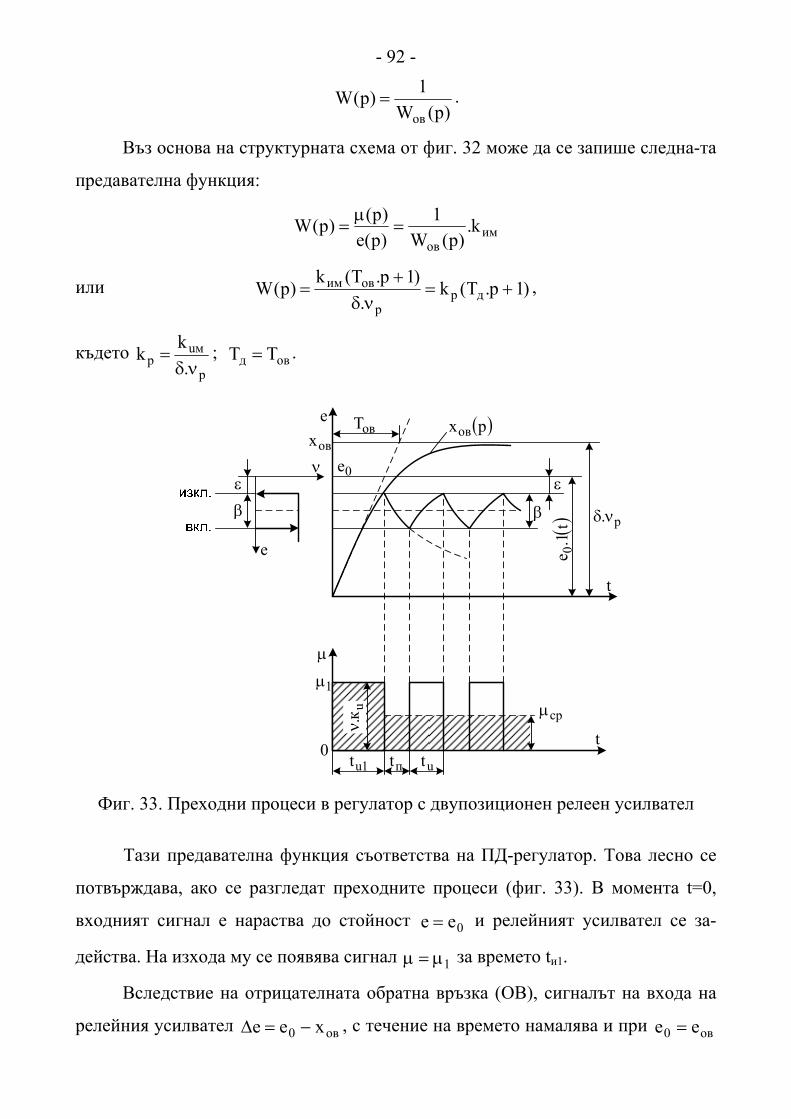
- 92 -
)p(W1)p(W
oв= .
Въз основа на структурната схема от фиг. 32 може да се запише следна-та
предавателна функция:
имoв
k.)p(W
1)p(e)p()p(W =
μ=
или )1p.T(k.
)1р.T(k)p(W дpр
oвим +=νδ
+= ,
където р
uмp .
kkνδ
= ; oвд TT = .
1ut пt utt
μ
1μ
0
срμuк.ν
β
ε
e
ν
e
0e
овT ( )рхов
β
ε
() t1.е 0
p.νδ
овх
t
Фиг. 33. Преходни процеси в регулатор с двупозиционен релеен усилвател
Тази предавателна функция съответства на ПД-регулатор. Това лесно се
потвърждава, ако се разгледат преходните процеси (фиг. 33). В момента t=0,
входният сигнал е нараства до стойност 0ee = и релейният усилвател се за-
действа. На изхода му се появява сигнал 1μ=μ за времето tи1.
Вследствие на отрицателната обратна връзка (ОВ), сигналът на входа на
релейния усилвател ов0 xee −=Δ , с течение на времето намалява и при ов0 ee =
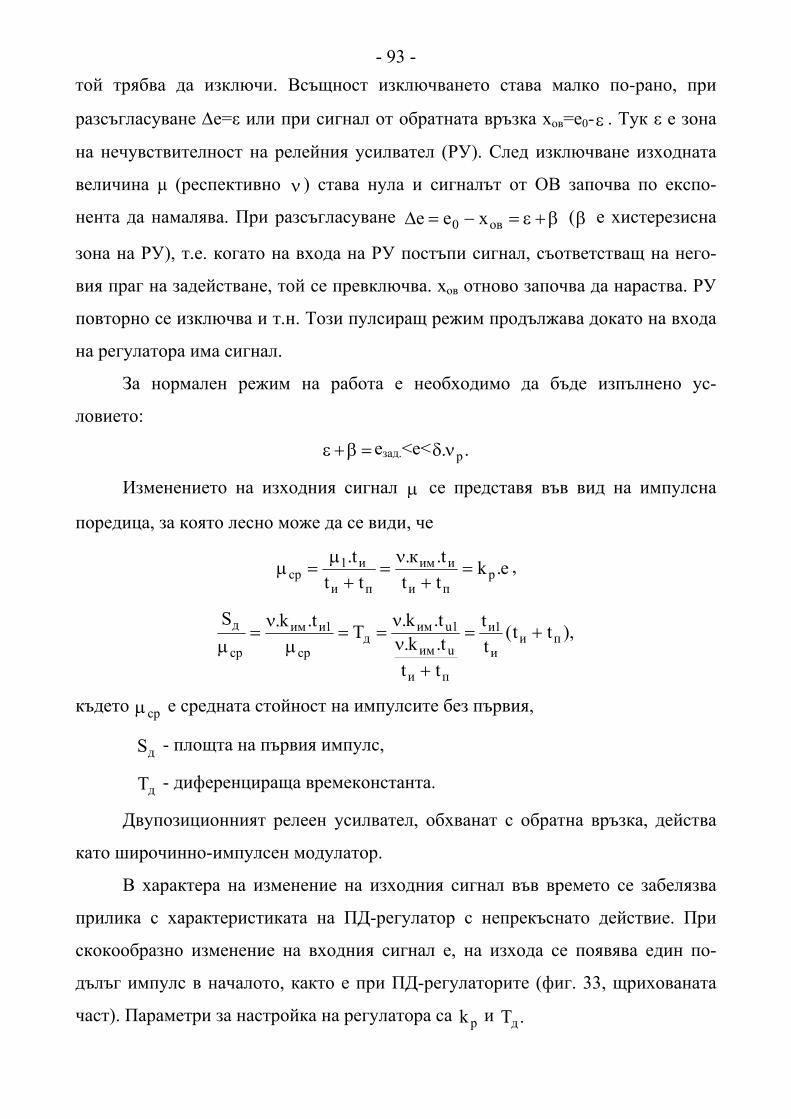
- 93 -той трябва да изключи. Всъщност изключването ставa малко по-рано, при
разсъгласуване Δе=ε или при сигнал от обратната връзка xoв=е0-ε . Тук ε е зона
на нечувствителност на релейния усилвател (РУ). След изключване изходната
величина μ (респективно ν ) става нула и сигналът от ОВ започва по експо-
нента да намалява. При разсъгласуване β+ε=−=Δ ов0 xee (β е хистерезисна
зона на РУ), т.е. когато на входа на РУ постъпи сигнал, съответстващ на него-
вия праг на задействане, той се превключва. хoв отново започва да нараства. РУ
повторно се изключва и т.н. Този пулсиращ режим продължава докато на входа
на регулатора има сигнал.
За нормален режим на работа е необходимо да бъде изпълнено ус-
ловието:
=β+ε езад.<е< .. pνδ
Изменението на изходния сигнал μ се представя във вид на импулсна
поредица, за която лесно може да се види, че
e.kttt.к.
ttt.
pпи
иим
пи
и1ср =
+ν
=+
μ=μ ,
),tt(tt
ttt.k.t.k.Tt.k.S
пии
1и
пи
uим
1uимд
ср
1иим
ср
д +=
+νν
==μ
ν=
μ
където срμ е средната стойност на импулсите без първия,
дS - площта на първия импулс,
дT - диференцираща времеконстанта.
Двупозиционният релеен усилвател, обхванат с обратна връзка, действа
като широчинно-импулсен модулатор.
В характера на изменение на изходния сигнал във времето се забелязва
прилика с характеристиката на ПД-регулатор с непрекъснато действие. При
скокообразно изменение на входния сигнал е, на изхода се появява един по-
дълъг импулс в началото, както е при ПД-регулаторите (фиг. 33, щрихованата
част). Параметри за настройка на регулатора са pk и .Tд
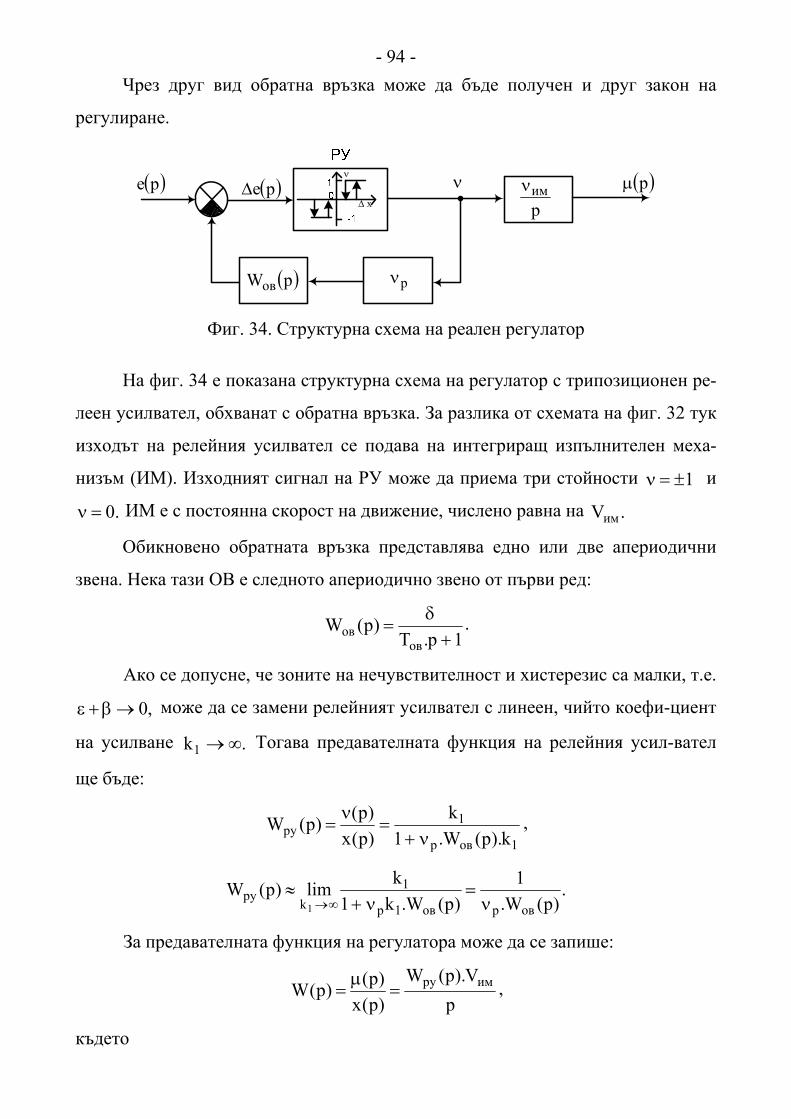
- 94 -Чрез друг вид обратна връзка може да бъде получен и друг закон на
регулиране.
римν ( )pμ( )pе
рν
ν( )реΔ
( )рWов
хΔ
ν
Фиг. 34. Структурна схема на реален регулатор
На фиг. 34 е показана структурна схема на регулатор с трипозиционен ре-
леен усилвател, обхванат с обратна връзка. За разлика от схемата на фиг. 32 тук
изходът на релейния усилвател се подава на интегриращ изпълнителен меха-
низъм (ИМ). Изходният сигнал на РУ може да приема три стойности 1±=ν и
.0=ν ИМ е с постоянна скорост на движение, числено равна на .Vим
Обикновено обратната връзка представлява едно или две апериодични
звена. Нека тази ОВ е следното апериодично звено от първи ред:
1p.T)p(W
oвoв +
δ= .
Ако се допусне, че зоните на нечувствителност и хистерезис са малки, т.е.
,0→β+ε може да се замени релейният усилвател с линеен, чийто коефи-циент
на усилване .k1 ∞→ Тогава предавателната функция на релейния усил-вател
ще бъде:
1oвp
1py k).p(W.1
k)p(x)p()p(W
ν+=
ν= ,
.)p(W.
1)p(W.k1
klim)p(Woвpoв1p
1kpy
1 ν=
ν+≈
∞→
За предавателната функция на регулатора може да се запише:
pV).p(W
)p(x)p()p(W имру=
μ= ,
където
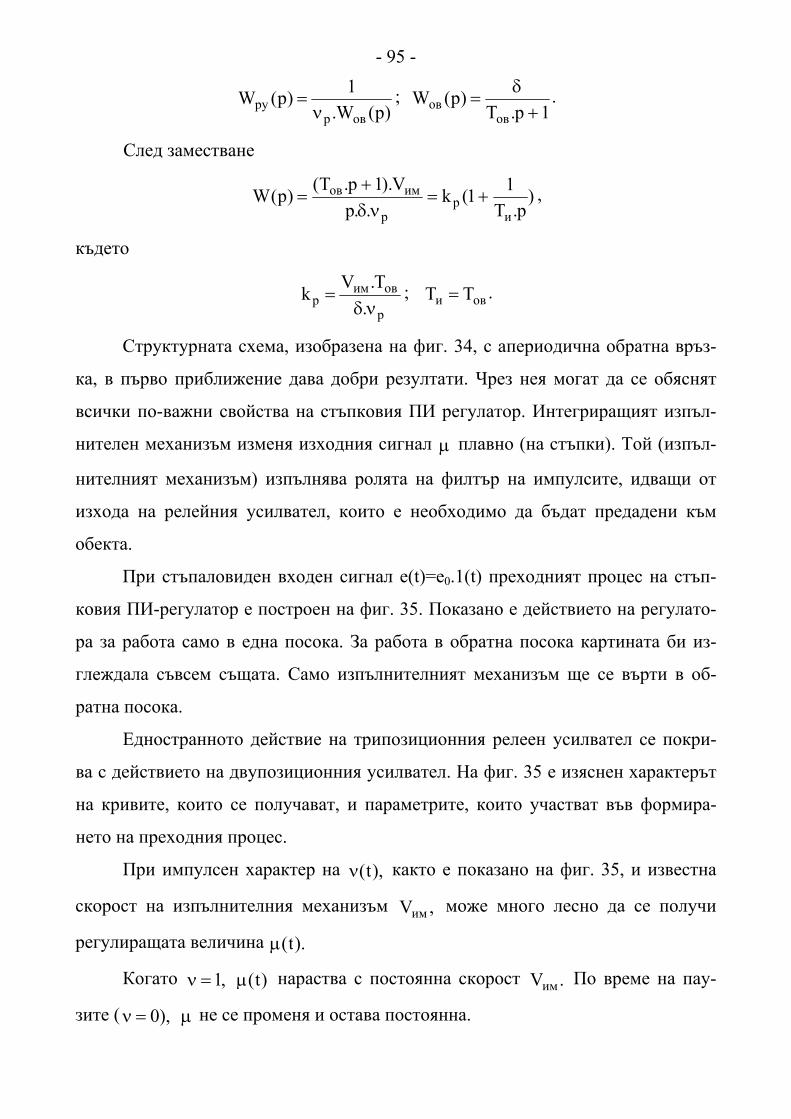
- 95 -
)p(W.1)p(Woвp
py ν= ;
1p.T)p(W
oвoв +
δ= .
След заместване
)p.T
11(k..р
V).1p.T()p(Wи
pp
имoв +=νδ+
= ,
където
p
oвимp .
T.Vkνδ
= ; oви TT = .
Структурната схема, изобразена на фиг. 34, с апериодична обратна връз-
ка, в първо приближение дава добри резултати. Чрез нея могат да се обяснят
всички по-важни свойства на стъпковия ПИ регулатор. Интегриращият изпъл-
нителен механизъм изменя изходния сигнал μ плавно (на стъпки). Той (изпъл-
нителният механизъм) изпълнява ролята на филтър на импулсите, идващи от
изхода на релейния усилвател, които е необходимо да бъдат предадени към
обекта.
При стъпаловиден входен сигнал е(t)=е0.1(t) преходният процес на стъп-
ковия ПИ-регулатор е построен на фиг. 35. Показано е действието на регулато-
ра за работа само в една посока. За работа в обратна посока картината би из-
глеждала съвсем същата. Само изпълнителният механизъм ще се върти в об-
ратна посока.
Едностранното действие на трипозиционния релеен усилвател се покри-
ва с действието на двупозиционния усилвател. На фиг. 35 е изяснен характерът
на кривите, които се получават, и параметрите, които участват във формира-
нето на преходния процес.
При импулсен характер на ),t(ν както е показано на фиг. 35, и известна
скорост на изпълнителния механизъм ,Vим може много лесно да се получи
регулиращата величина ).t(μ
Когато )t(,1 μ=ν нараства с постоянна скорост .Vим По време на пау-
зите ( μ=ν ),0 не се променя и остава постоянна.
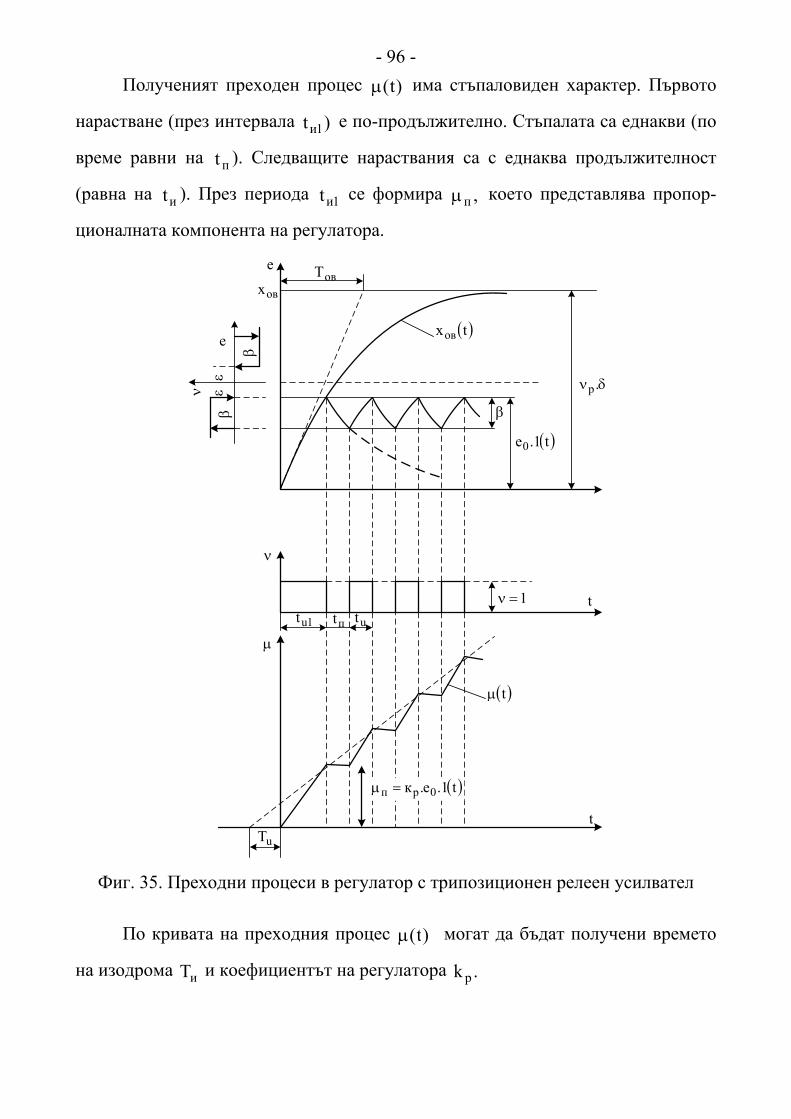
- 96 -Полученият преходен процес )t(μ има стъпаловиден характер. Първото
нарастване (през интервала )t 1и е по-продължително. Стъпалата са еднакви (по
време равни на пt ). Следващите нараствания са с еднаква продължителност
(равна на иt ). През периода 1иt се формира ,пμ което представлява пропор-
ционалната компонента на регулатора.
uT
( )t1.е.к 0рп =μ
( )tμ
μ
t
1=ν
ν
t1ut utпt
овТ
( )t1.е0
ν
e
e
овх
( )tхов
ββε
ε
β
δν .p
Фиг. 35. Преходни процеси в регулатор с трипозиционен релеен усилвател
По кривата на преходния процес )t(μ могат да бъдат получени времето
на изодрома иT и коефициентът на регулатора .k p
- 97 -Област на нормална работа на промишлени аналогови регулатори
Поради несъвършенството на елементната база, от която се изграждат
регулаторите, законите, които те формират, се отличават от идеалните закони,
заложени в тях. Степента на отдалечаване на реалния закон от идеалния се ха-
рактеризира чрез честотната област на нормална работа на регулатора. Об-
ластта на нормална работа е оценка, която може да се използвана за сравнение
между два еднотипни регулатора, изградени по различни структурни схеми.
Промишлените регулатори са реални устройства. Техните преходни и
честотни характеристики се различават от тези на идеалните регулатори. Пре-
давателната функция на реален регулатор Wp(p) може да бъде представена като
произведение от предавателната функция на идеален регулатор Wи(p) и
предавателната функция на едно баластно (паразитно) звено Wб (p):
).р(W)р(W)р(W биp =
Баластното звено е това, което изкривява характеристиките. При раз-
лични честоти изкривяване е различно.
Областта от честоти, в която АЧХ и ФЧХ на реалния регулатор не се
различават от съответните характеристики на идеалния регулатор с повече от
предварително зададени стойности, се нарича област на нормална работа
(ОНР). Тези стойности са нормирани и по модул и по фаза са в границите:
( )( ) ,)1510(
%,10A
н
нo÷±=ωϕΔ
±=ωΔ
Решението на системата уравнения определя ОНР.
)()()(A)(A
н
н
ωϕΔ≤ωϕΔωΔ≤ωΔ
(1)
( ) ( ) ( )( )
( ) ( ) ( ).
,А
ААА
ри
и
ри
ωϕ−ωϕ=ωϕΔω
ω−ω=ωΔ
)(),(А),(),(А ррии ωϕωωϕω са съответните амплитудно-честотна и
фазо-честотна характеристики на идеалния и реалния регулатори.
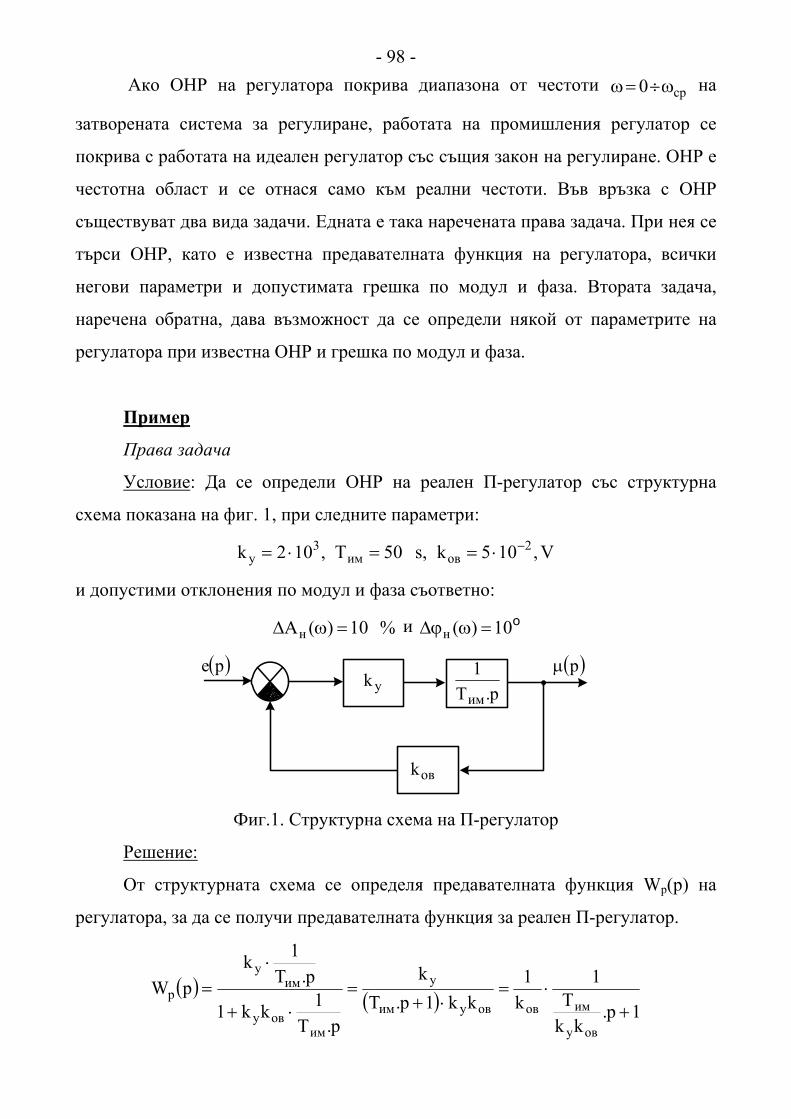
- 98 - Ако ОНР на регулатора покрива диапазона от честоти ср0 ω÷=ω на
затворената система за регулиране, работата на промишления регулатор се
покрива с работата на идеален регулатор със същия закон на регулиране. ОНР е
честотна област и се отнася само към реални честоти. Във връзка с ОНР
съществуват два вида задачи. Едната е така наречената права задача. При нея се
търси ОНР, като е известна предавателната функция на регулатора, всички
негови параметри и допустимата грешка по модул и фаза. Втората задача,
наречена обратна, дава възможност да се определи някой от параметрите на
регулатора при известна ОНР и грешка по модул и фаза.
Пример
Права задача
Условие: Да се определи ОНР на реален П-регулатор със структурна
схема показана на фиг. 1, при следните параметри:
,102k 3у ⋅= ,s50Тим = V,105k 2
ов−⋅=
и допустими отклонения по модул и фаза съответно:
%10)(Ан =ωΔ и o10)(н =ωϕΔ
ykр.Т
1
им
овk
( )ре ( )рμ
Фиг.1. Структурна схема на П-регулатор
Решение:
От структурната схема се определя предавателната функция Wp(p) на
регулатора, за да се получи предавателната функция за реален П-регулатор.
( ) ( ) 1p.kk
Т1
k1
kk1p.Tk
p.Т1kk1
p.T1k
pW
ову
имововуим
y
имову
имy
p+
⋅=⋅+
=⋅+
⋅=

- 99 -
В последния израз ров
и kk1)р(W == е предавателната функция на
идеалния регулатор, а 1p.Т
1
1p.kk
Т1)р(W
б
ову
имб +
=+
= е предавателната функция
на баластното звено, където: ову
имб kk
ТT = .
Амплитудно-честотната (АЧХ) и фазо-честотната (ФЧХ) характеристики
на идеалния регулатор са ри k)(А =ω и .0)(и =ωϕ
АЧХ и ФЧХ на баластното звено са
.Tarctg)(
,T1
1)(А
бб
2б
2б
ω−=ωϕ
ω+=ω
АЧХ и ФЧХ на реалния регулатор са
.Tarctg)Tarctg(0)()()(
,T1
k
T1
1.k)(А).(А)(A
бббиp
2б
2р
2б
2рбиp
ω−=ω−+=ωϕ+ωϕ=ωϕ
ω+=
ω+=ωω=ω
От условието ce )(A)(A н ωΔ≤ωΔ се получава 1,0)(A ≤ωΔ
1,0)(А
)(А)(А)(А
и
ри ≤ω
ω−ω=ωΔ
1)Т1.(81,0
1Т1.9,0
1Т1.1,0Т1
Т1.1,01Т1
1,0Т1
11
1,0k
Т1
kk
2б
2
2б
2
2б
22б
2
2б
22б
2
2б
2
р
2б
2р
р
≤ω+
≤ω+
≤ω+−ω+
ω+≤−ω+
≤ω+
−
≤ω+
−
- 100 -
1А
1
23ову
имб
2б
2б
2
2б
2
2б
2
s97,0
s97,025,081,0
19,0
s5,0105102
50kk
ТТ
Т81,019,0
19,0Т81,0
81,01Т81,0
1Т81,081,0
−Δ
−
−
≤ω
=⋅
≤ω
=⋅⋅⋅
==
⋅≤ω
≤ω
−≤ω
≤ω+
От условието )()( и ωϕΔ≤ωϕΔ се получава o10)( ≤ωϕΔ
o10)()()( ри ≤ωϕ−ωϕ=ωϕΔ
( )
5,01763,0
5,01763,0
T1763,0
1763,0T10Tarctg
10Tarctg0
б
б
б
б
≤ω
=≤ω
≤ω≤ω
≤ω−−o
o
от където 1s35,0 −ϕΔ ≤ω .
Стойността 1s35,0 −ϕΔ ≤ω е решение на системата (1), защото е по-
малката от двете стойности. Тази стойност определя ОНР.
Графичното решението на задачата изглежда по следния начин.
Обратна задача
Условие: За реален П-регулатор, чиято структурна схема е показана на
фиг.1, да се построи зависимостта )(fТим ω= . Честотата ω се определя за
ω , s-1
0 0,35 0,97
- 101 -областта на нормална работа, която е от 0 до 0,35 s-1. Числените стойности на
параметрите са 3у 102k ⋅= и V,105k 2
ов−⋅= , а допустими отклонения по модул
и фаза съответно %10)(Ap =ωΔ и o10)(p =ωϕΔ .
Решение:
От структурната схема се определя предавателната функция WP(p) на
регулатора, за да се получи стандартна форма на предавателната функция за
реален П-регулатор.
( ) ( ) 1p.kk
Т1
k1
kk1p.Tk
p.Т1kk1
p.T1k
pW
ову
имововуим
y
имову
имy
p+
⋅=⋅+
=⋅+
⋅=
В последния израз ров
и kk1)р(W == е предавателната функция на
идеалния регулатор, а 1p.Т
1
1p.kk
Т1)р(W
б
ову
имб +
=+
= е предавателната функция
на баластното звено, където: ову
имб kk
ТT = .
АЧХ и ФЧХ на идеалния регулатор са ри k)(А =ω и .0)(и =ωϕ
АЧХ и ФЧХ на баластното звено са
.Tarctg)(
,T1
1)(А
бб
2б
2б
ω−=ωϕ
ω+=ω
АЧХ и ФЧХ на реалния регулатор са
.Tarctg)Tarctg(0)()()(
,T1
k
T1
1.k)(А).(А)(A
бббиp
2б
2р
2б
2рбиp
ω−=ω−+=ωϕ+ωϕ=ωϕ
ω+=
ω+=ωω=ω
От условието ce )(A)(A н ωΔ≤ωΔ се получава 1,0)(A ≤ωΔ
1,0)(А
)(А)(А)(А
и
ри ≤ω
ω−ω=ωΔ
- 102 -
1)Т1.(81,0
1Т1.9,0
1Т1.1,0Т1
Т1.1,01Т1
1,0Т1
11
1,0k
Т1
kk
2б
2
2б
2
2б
22б
2
2б
22б
2
2б
2
р
2б
2р
р
≤ω+
≤ω+
≤ω+−ω+
ω+≤−ω+
≤ω+
−
≤ω+
−
2овуим
2ову
им
2б
2б
2
2б
2
2б
2
.81,019,0.k.kТ
.81,019,0
k.kТ
.81,019,0Т
19,0Т81,0
81,01Т81,0
1Т81,081,0
А ω≤
ω≤
ω≤
≤ω
−≤ω
≤ω+
Δ
От условието )()( и ωϕΔ≤ωϕΔ се получава o10)( ≤ωϕΔ
o10)()()( ри ≤ωϕ−ωϕ=ωϕΔ
( )
ω≤
ω≤
ω≤
≤ω≤ω
≤ω−−
ϕΔ
1763,0.k.kТ
1763,0k.k
Т
1763,0Т
1763,0T10Tarctg
10Tarctg0
овуим
ову
им
б
б
б
бo
o
Резултатите от изчисленията са показани в таблица 1.
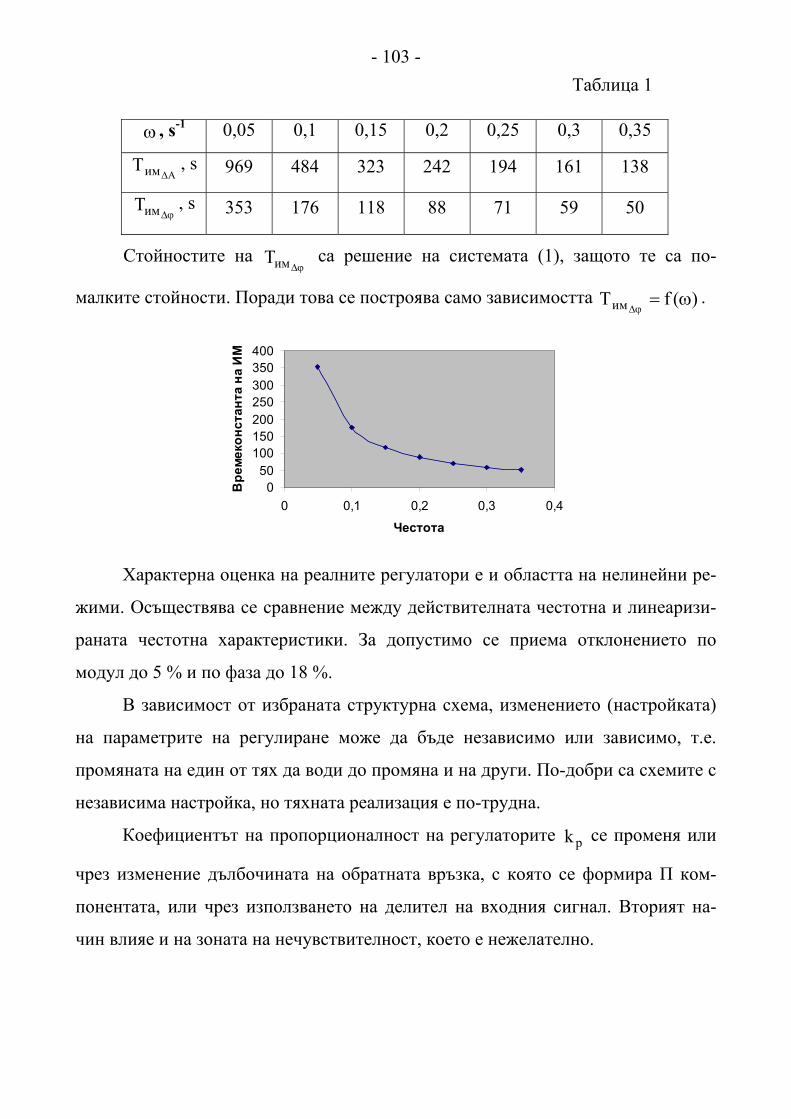
- 103 - Таблица 1
Стойностите на ϕΔимT са решение на системата (1), защото те са по-
малките стойности. Поради това се построява само зависимостта )(fТим ω=ϕΔ
.
050
100150200250300350400
0 0,1 0,2 0,3 0,4
Честота
Вре
меконс
танта на
ИМ
Характерна оценка на реалните регулатори е и областта на нелинейни ре-
жими. Осъществява се сравнение между действителната честотна и линеаризи-
раната честотна характеристики. За допустимо се приема отклонението по
модул до 5 % и по фаза до 18 %.
В зависимост от избраната структурна схема, изменението (настройката)
на параметрите на регулиране може да бъде независимо или зависимо, т.е.
промяната на един от тях да води до промяна и на други. По-добри са схемите с
независима настройка, но тяхната реализация е по-трудна.
Коефициентът на пропорционалност на регулаторите pk се променя или
чрез изменение дълбочината на обратната връзка, с която се формира П ком-
понентата, или чрез използването на делител на входния сигнал. Вторият на-
чин влияе и на зоната на нечувствителност, което е нежелателно.
ω , s-1 0,05 0,1 0,15 0,2 0,25 0,3 0,35
АимТΔ
, s 969 484 323 242 194 161 138
ϕΔимT , s 353 176 118 88 71 59 50
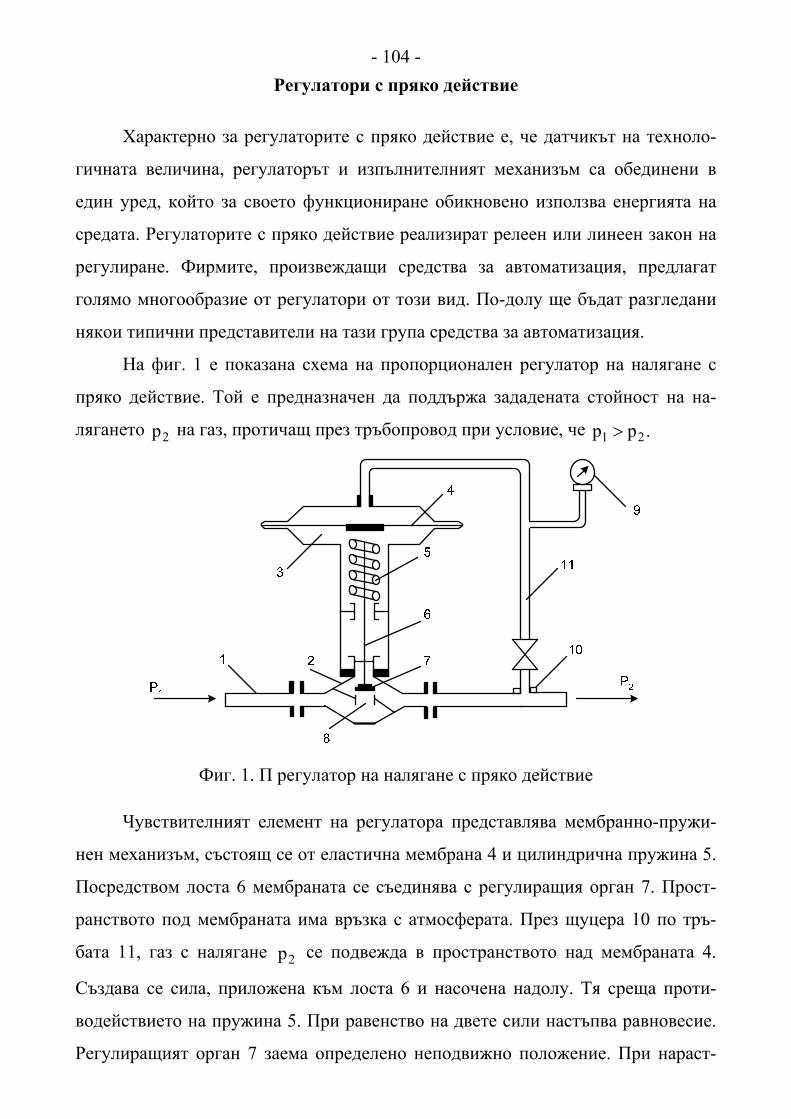
- 104 -Регулатори с пряко действие
Характерно за регулаторите с пряко действие е, че датчикът на техноло-
гичната величина, регулаторът и изпълнителният механизъм са обединени в
един уред, който за своето функциониране обикновено използва енергията на
средата. Регулаторите с пряко действие реализират релеен или линеен закон на
регулиране. Фирмите, произвеждащи средства за автоматизация, предлагат
голямо многообразие от регулатори от този вид. По-долу ще бъдат разгледани
някои типични представители на тази група средства за автоматизация.
На фиг. 1 е показана схема на пропорционален регулатор на налягане с
пряко действие. Той е предназначен да поддържа зададената стойност на на-
лягането 2p на газ, протичащ през тръбопровод при условие, че .pp 21 >
Фиг. 1. П регулатор на налягане с пряко действие
Чувствителният елемент на регулатора представлява мембранно-пружи-
нен механизъм, състоящ се от еластична мембрана 4 и цилиндрична пружина 5.
Посредством лоста 6 мембраната се съединява с регулиращия орган 7. Прост-
ранството под мембраната има връзка с атмосферата. През щуцера 10 по тръ-
бата 11, газ с налягане 2р се подвежда в пространството над мембраната 4.
Създава се сила, приложена към лоста 6 и насочена надолу. Тя среща проти-
водействието на пружина 5. При равенство на двете сили настъпва равновесие.
Регулиращият орган 7 заема определено неподвижно положение. При нараст-
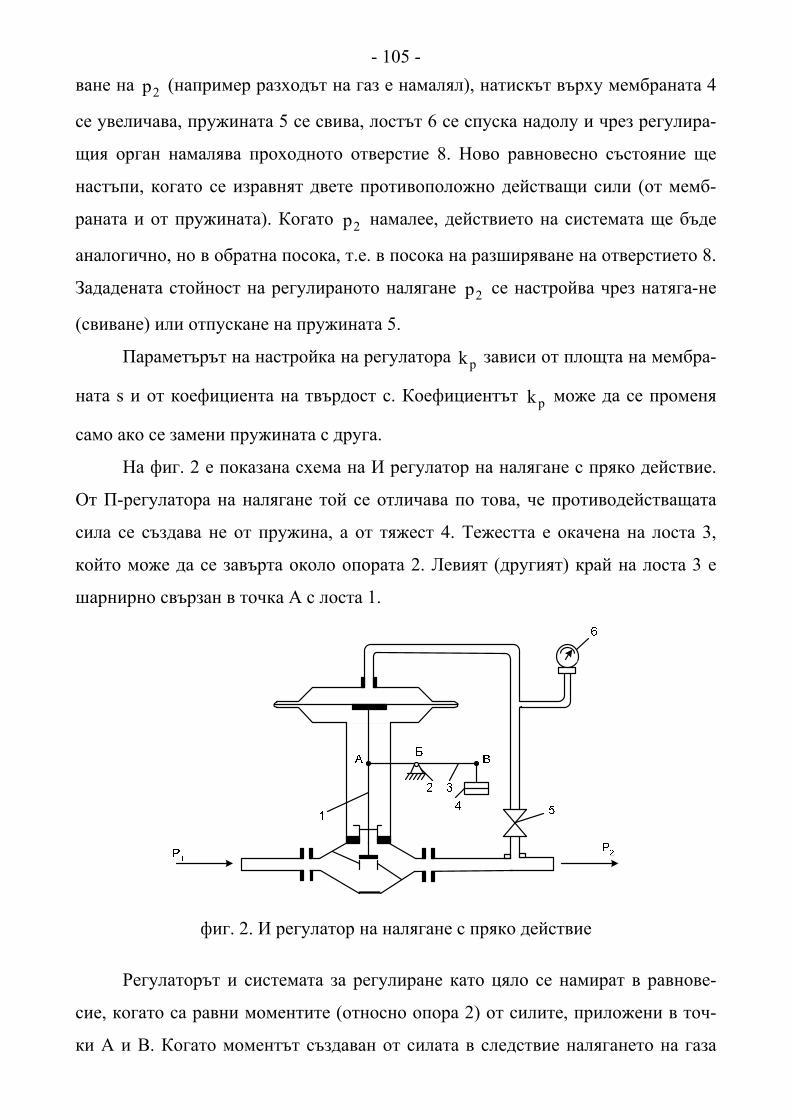
- 105 -ване на 2р (например разходът на газ е намалял), натискът върху мембраната 4
се увеличава, пружината 5 се свива, лостът 6 се спуска надолу и чрез регулира-
щия орган намалява проходното отверстие 8. Ново равновесно състояние ще
настъпи, когато се изравнят двете противоположно действащи сили (от мемб-
раната и от пружината). Когато 2р намалее, действието на системата ще бъде
аналогично, но в обратна посока, т.е. в посока на разширяване на отверстието 8.
Зададената стойност на регулираното налягане 2р се настройва чрез натяга-не
(свиване) или отпускане на пружината 5.
Параметърът на настройка на регулатора pk зависи от площта на мембра-
ната s и от коефициента на твърдост с. Коефициентът pk може да се променя
само ако се замени пружината с друга.
На фиг. 2 е показана схема на И регулатор на налягане с пряко действие.
От П-регулатора на налягане той се отличава по това, че противодействащата
сила се създава не от пружина, а от тяжест 4. Тежестта е окачена на лоста 3,
който може да се завърта около опората 2. Левият (другият) край на лоста 3 е
шарнирно свързан в точка А с лоста 1.
фиг. 2. И регулатор на налягане с пряко действие
Регулаторът и системата за регулиране като цяло се намират в равнове-
сие, когато са равни моментите (относно опора 2) от силите, приложени в точ-
ки А и В. Когато моментът създаван от силата в следствие налягането на газа
- 106 -върху мембраната нарастне, регулиращият орган се спуска надолу, а когато
моментът, създаден от тежестта 4, е по-голям – регулиращият орган се измест-
ва нагоре.
За равновесно състояние, уравнението на регулатора има вида:
BБ.GБA.s.p =
или
,БA
BБ:
sGp =
където p е налягането на газа върху мембраната; s – площ на мембраната; G –
маса на тежестта; BБ,БA – рамена на лоста 3 относно опора 2.
Смяна на равновесното състояние с друго може да стане чрез изменение
на тежестта 4, а най-лесно като се променя дължината на рамото .BБ По такъв
начин, всъщност, се настройва зададената стойност на регулираното налягане.
За разлика от П-регулатора, който може да заема равновесно положение
при всяка стойност на входната величина, И регулаторът остава в равновесие
само в едно положение, съответстващо на зададената стойност на регулираната
величина. Положението на регулиращия орган на И регулатора не зависи от
стойностите на регулираното налягане. Предимство му е това, че той осъщест-
вява регулиране без остатъчно отклонение на регулираната величина.
Регулаторите на температура с пряко действие представляват регулиращи
устройства, в които енергията, необходима за функциониране на измервателни-
те, регулиращите и изпълнителните еламенти се черпи от енергията на регули-
руемата среда. Схемите на реглатори на температура, работещи на принципа на
разширение на течност, са показани на фиг. 3 и фиг. 4.
Състоят се от регулиращ клапан и термостат. Към регулиращия термо-
стат се отнасят датчикът за температура (11), задатчикът (13), съединителната
тръба (10) и хидравличното задвижване във вид на работен елемент (7). Теч-
ността в измервателния елемент действа чрез работния силфон(9) и щифта (8)
на конуса на клапана (3), закрепен на носача (6).
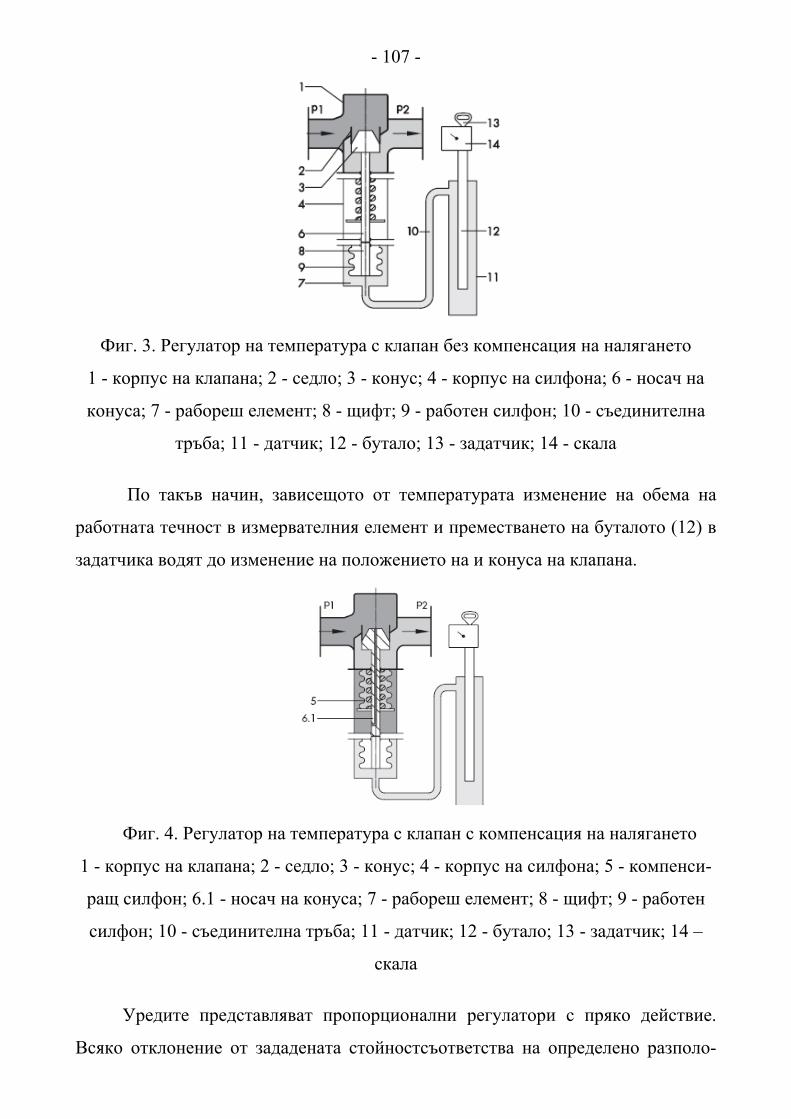
- 107 -
Фиг. 3. Регулатор на температура с клапан без компенсация на налягането
1 - корпус на клапана; 2 - седло; 3 - конус; 4 - корпус на силфона; 6 - носач на
конуса; 7 - рабореш елемент; 8 - щифт; 9 - работен силфон; 10 - съединителна
тръба; 11 - датчик; 12 - бутало; 13 - задатчик; 14 - скала
По такъв начин, зависещото от температурата изменение на обема на
работната течност в измервателния елемент и преместването на буталото (12) в
задатчика водят до изменение на положението на и конуса на клапана.
Фиг. 4. Регулатор на температура с клапан с компенсация на налягането
1 - корпус на клапана; 2 - седло; 3 - конус; 4 - корпус на силфона; 5 - компенси-
ращ силфон; 6.1 - носач на конуса; 7 - рабореш елемент; 8 - щифт; 9 - работен
силфон; 10 - съединителна тръба; 11 - датчик; 12 - бутало; 13 - задатчик; 14 –
скала
Уредите представляват пропорционални регулатори с пряко действие.
Всяко отклонение от зададената стойностсъответства на определено разполо-
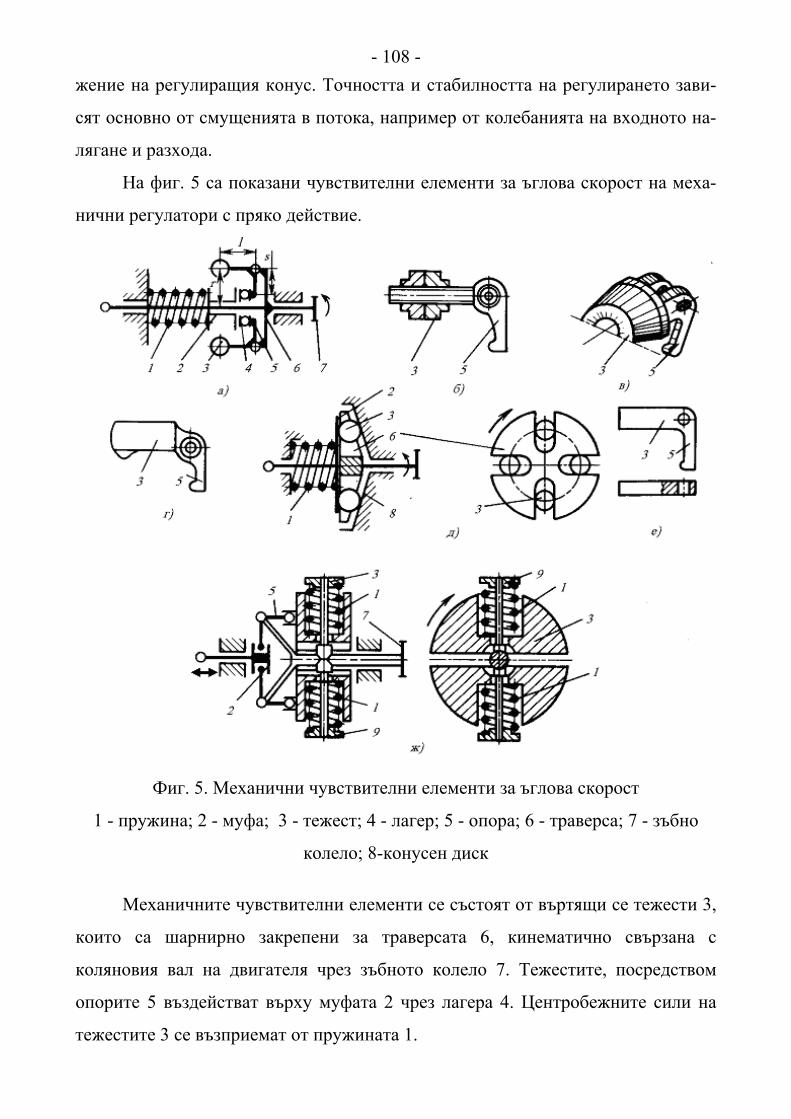
- 108 -жение на регулиращия конус. Точността и стабилността на регулирането зави-
сят основно от смущенията в потока, например от колебанията на входното на-
лягане и разхода.
На фиг. 5 са показани чувствителни елементи за ъглова скорост на меха-
нични регулатори с пряко действие.
Фиг. 5. Механични чувствителни елементи за ъглова скорост
1 - пружина; 2 - муфа; 3 - тежест; 4 - лагер; 5 - опора; 6 - траверса; 7 - зъбно
колело; 8-конусен диск
Механичните чувствителни елементи се състоят от въртящи се тежести 3,
които са шарнирно закрепени за траверсата 6, кинематично свързана с
коляновия вал на двигателя чрез зъбното колело 7. Тежестите, посредством
опорите 5 въздействат върху муфата 2 чрез лагера 4. Центробежните сили на
тежестите 3 се възприемат от пружината 1.
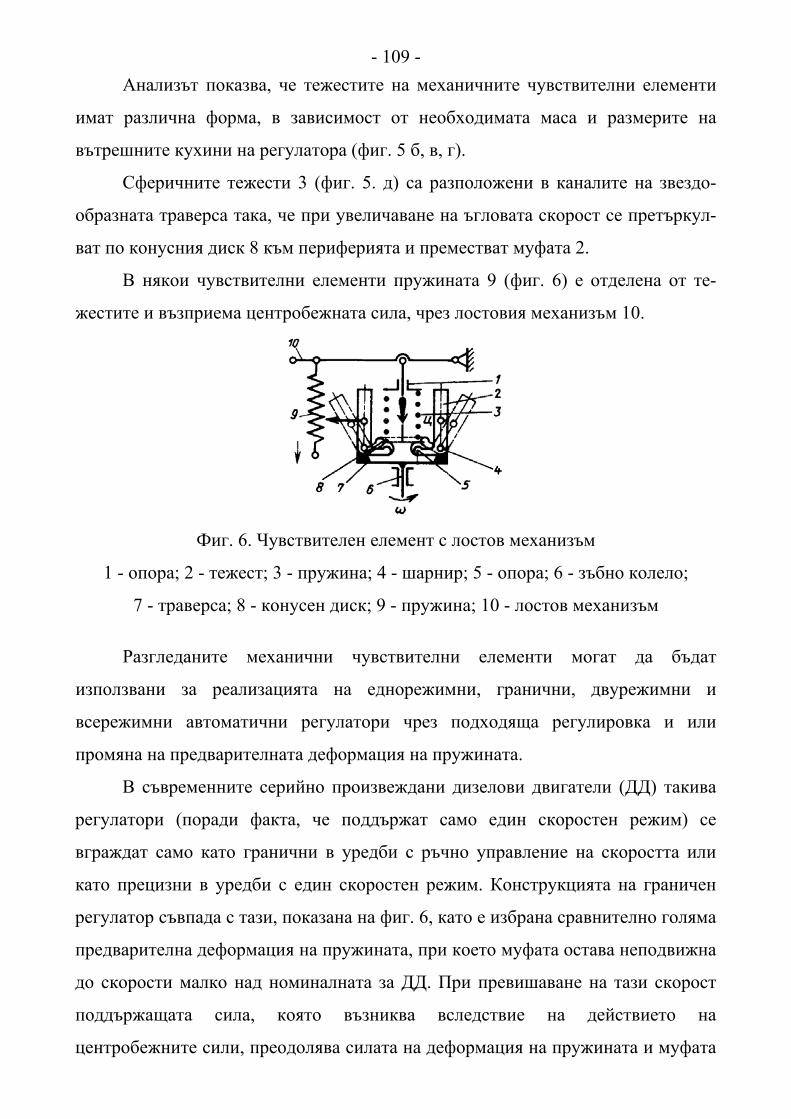
- 109 -Анализът показва, че тежестите на механичните чувствителни елементи
имат различна форма, в зависимост от необходимата маса и размерите на
вътрешните кухини на регулатора (фиг. 5 б, в, г).
Сферичните тежести 3 (фиг. 5. д) са разположени в каналите на звездо-
образната траверса така, че при увеличаване на ъгловата скорост се претъркул-
ват по конусния диск 8 към периферията и преместват муфата 2.
В някои чувствителни елементи пружината 9 (фиг. 6) е отделена от те-
жестите и възприема центробежната сила, чрез лостовия механизъм 10.
Фиг. 6. Чувствителен елемент с лостов механизъм
1 - опора; 2 - тежест; 3 - пружина; 4 - шарнир; 5 - опора; 6 - зъбно колело;
7 - траверса; 8 - конусен диск; 9 - пружина; 10 - лостов механизъм
Разгледаните механични чувствителни елементи могат да бъдат
използвани за реализацията на еднорежимни, гранични, двурежимни и
всережимни автоматични регулатори чрез подходяща регулировка и или
промяна на предварителната деформация на пружината.
В съвременните серийно произвеждани дизелови двигатели (ДД) такива
регулатори (поради факта, че поддържат само един скоростен режим) се
вграждат само като гранични в уредби с ръчно управление на скоростта или
като прецизни в уредби с един скоростен режим. Конструкцията на граничен
регулатор съвпада с тази, показана на фиг. 6, като е избрана сравнително голяма
предварителна деформация на пружината, при което муфата остава неподвижна
до скорости малко над номиналната за ДД. При превишаване на тази скорост
поддържащата сила, която възниква вследствие на действието на
центробежните сили, преодолява силата на деформация на пружината и муфата
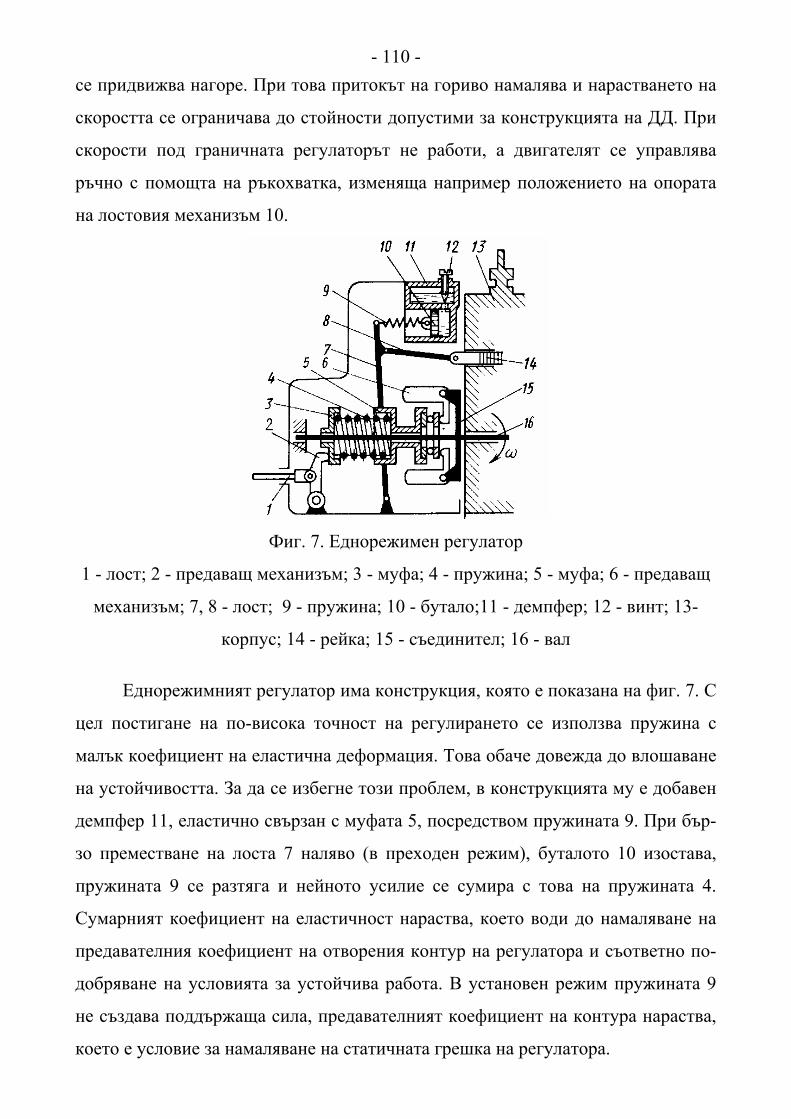
- 110 -се придвижва нагоре. При това притокът на гориво намалява и нарастването на
скоростта се ограничава до стойности допустими за конструкцията на ДД. При
скорости под граничната регулаторът не работи, а двигателят се управлява
ръчно с помощта на ръкохватка, изменяща например положението на опората
на лостовия механизъм 10.
Фиг. 7. Еднорежимен регулатор
1 - лост; 2 - предаващ механизъм; 3 - муфа; 4 - пружина; 5 - муфа; 6 - предаващ
механизъм; 7, 8 - лост; 9 - пружина; 10 - бутало;11 - демпфер; 12 - винт; 13-
корпус; 14 - рейка; 15 - съединител; 16 - вал
Еднорежимният регулатор има конструкция, която е показана на фиг. 7. С
цел постигане на по-висока точност на регулирането се използва пружина с
малък коефициент на еластична деформация. Това обаче довежда до влошаване
на устойчивостта. За да се избегне този проблем, в конструкцията му е добавен
демпфер 11, еластично свързан с муфата 5, посредством пружината 9. При бър-
зо преместване на лоста 7 наляво (в преходен режим), буталото 10 изостава,
пружината 9 се разтяга и нейното усилие се сумира с това на пружината 4.
Сумарният коефициент на еластичност нараства, което води до намаляване на
предавателния коефициент на отворения контур на регулатора и съответно по-
добряване на условията за устойчива работа. В установен режим пружината 9
не създава поддържаща сила, предавателният коефициент на контура нараства,
което е условие за намаляване на статичната грешка на регулатора.
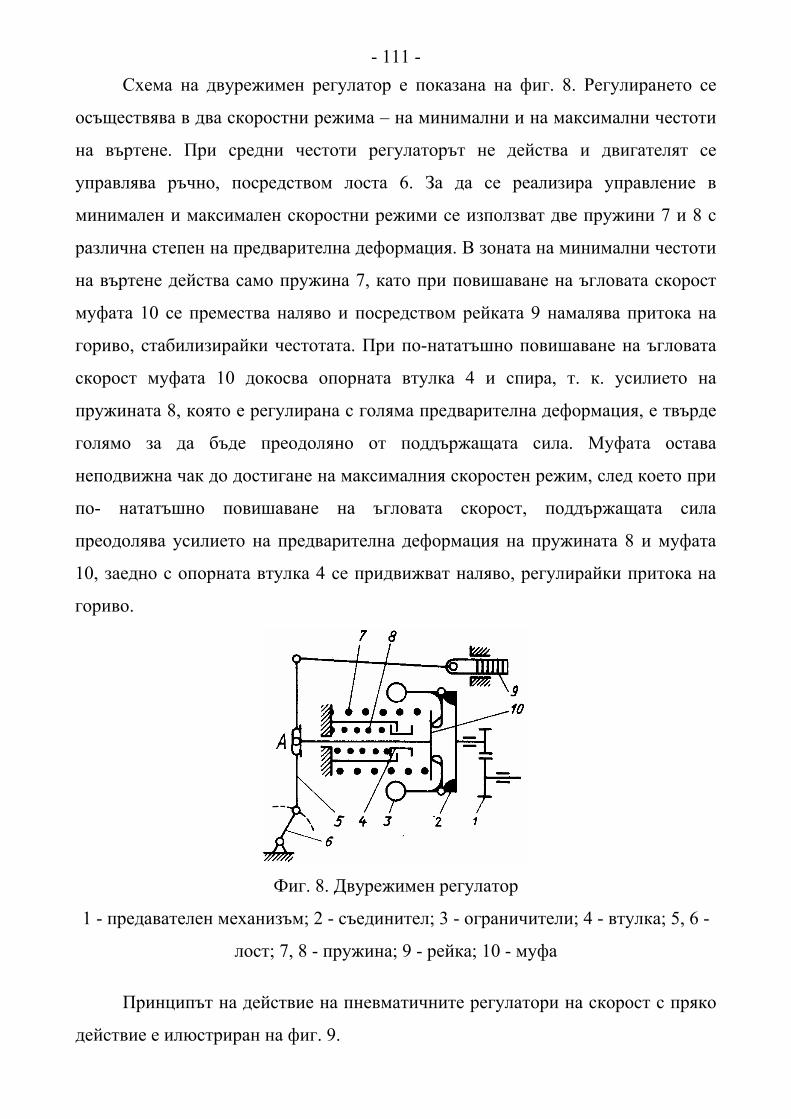
- 111 -Схема на двурежимен регулатор е показана на фиг. 8. Регулирането се
осъществява в два скоростни режима – на минимални и на максимални честоти
на въртене. При средни честоти регулаторът не действа и двигателят се
управлява ръчно, посредством лоста 6. За да се реализира управление в
минимален и максимален скоростни режими се използват две пружини 7 и 8 с
различна степен на предварителна деформация. В зоната на минимални честоти
на въртене действа само пружина 7, като при повишаване на ъгловата скорост
муфата 10 се премества наляво и посредством рейката 9 намалява притока на
гориво, стабилизирайки честотата. При по-нататъшно повишаване на ъгловата
скорост муфата 10 докосва опорната втулка 4 и спира, т. к. усилието на
пружината 8, която е регулирана с голяма предварителна деформация, е твърде
голямо за да бъде преодоляно от поддържащата сила. Муфата остава
неподвижна чак до достигане на максималния скоростен режим, след което при
по- нататъшно повишаване на ъгловата скорост, поддържащата сила
преодолява усилието на предварителна деформация на пружината 8 и муфата
10, заедно с опорната втулка 4 се придвижват наляво, регулирайки притока на
гориво.
Фиг. 8. Двурежимен регулатор
1 - предавателен механизъм; 2 - съединител; 3 - ограничители; 4 - втулка; 5, 6 -
лост; 7, 8 - пружина; 9 - рейка; 10 - муфа
Принципът на действие на пневматичните регулатори на скорост с пряко
действие е илюстриран на фиг. 9.
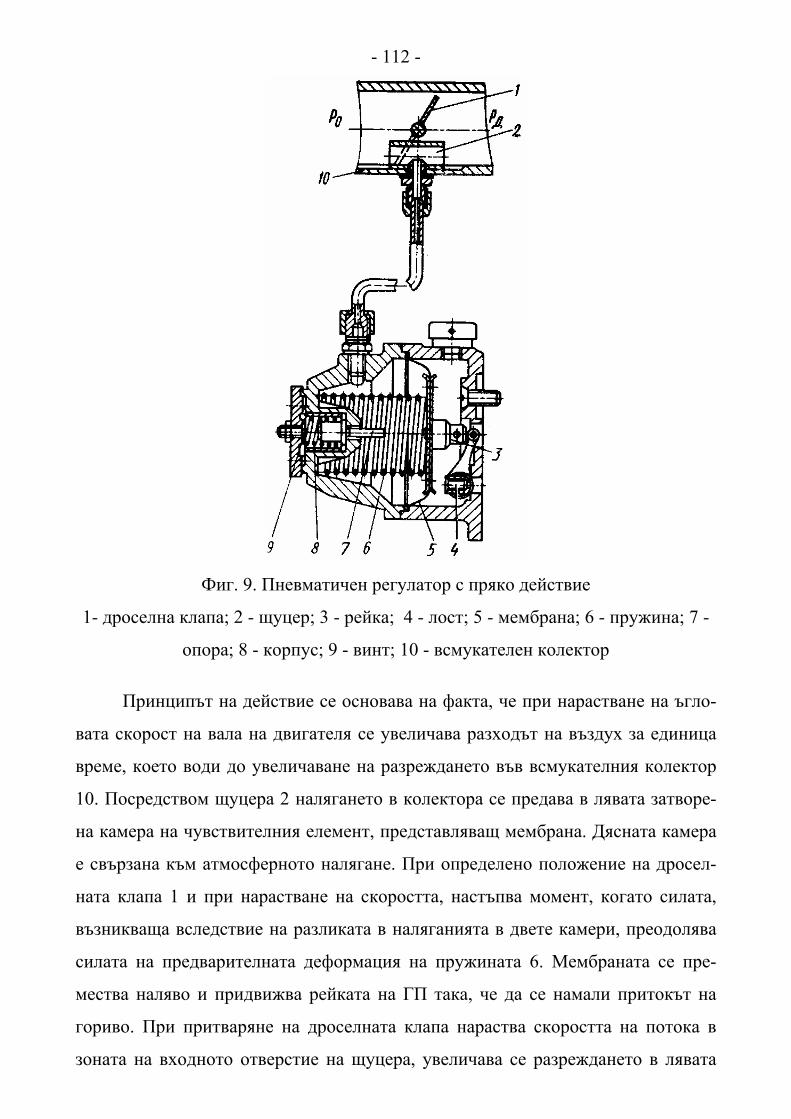
- 112 -
Фиг. 9. Пневматичен регулатор с пряко действие
1- дроселна клапа; 2 - щуцер; 3 - рейка; 4 - лост; 5 - мембрана; 6 - пружина; 7 -
опора; 8 - корпус; 9 - винт; 10 - всмукателен колектор
Принципът на действие се основава на факта, че при нарастване на ъгло-
вата скорост на вала на двигателя се увеличава разходът на въздух за единица
време, което води до увеличаване на разреждането във всмукателния колектор
10. Посредством щуцера 2 налягането в колектора се предава в лявата затворе-
на камера на чувствителния елемент, представляващ мембрана. Дясната камера
е свързана към атмосферното налягане. При определено положение на дросел-
ната клапа 1 и при нарастване на скоростта, настъпва момент, когато силата,
възникваща вследствие на разликата в наляганията в двете камери, преодолява
силата на предварителната деформация на пружината 6. Мембраната се пре-
мества наляво и придвижва рейката на ГП така, че да се намали притокът на
гориво. При притваряне на дроселната клапа нараства скоростта на потока в
зоната на входното отверстие на щуцера, увеличава се разреждането в лявата

- 113 -камера и регулаторната характеристика се премества към зоната на ниските
скорости. По този начин, регулирайки с помощта на дроселната клапа ефектив-
ното сечение на всмукателния колектор се постига всережимност на регулато-
ра. Лостът 4 служи за изключване на двигателя.
Пневматичните регулатори с пряко действие притежават по-голяма зона
на нечувствителност от механичните, тъй като разликата в наляганията от двете
страни на мембраната е твърде малка (2...4.10-3 МPa). Това налага използването
на мембрани с голяма площ и “меки” пружини. Усилията, създавани от тези
елементи в режим на регулиране, са съпоставими по големина със силите на
триене в механизма на рейката. Точността им на регулиране не е висока и
поради факта, че скоростта се измерва косвено.
Хидравличните регулатори за скорост с пряко действие (фиг. 10) използ-
ват в качеството на работно тяло минерално масло или дизелово гориво, което
се подава в цилиндъра 4 от помпата 1.
Фиг. 10. Хидравличен регулатор на скорост с пряко действие
1 - помпа; 2 - тръба; 3 - ограничител; 4 - цилиндър; 5 - бутало; 6 - пружина; 7 -
рейка; 8 - горивна помпа; 9 - тръба; 10 - педал за управление; 11 - лост; 12 -
ограничител; 13 - лост; 14 - предавка; 15- иглен дросел; 16, 17 - клапан; 18 -
резервоар
- 114 -Излишъкът през игления дросел 15 и клапана 17 постъпва в резервоара
18. Буталото 5 на цилиндъра е свързано с рейката 7 на горивната помпа 8.
Неговото положение се определя от равенството на усилието на пружината 6 и
на налягането, действащо в лявата камера на цилиндъра. При нарастване на
ъгловата скорост се увеличава производителността на помпата, а оттам и
налягането в цилиндъра 4, вследствие на което рейката се премества надясно,
като намалява притока на гориво. Всережимността се осигурява чрез премест-
ване на иглата 15 с лоста 13 и педала за управление 10 или чрез изменение на
предварителната деформация на пружината 6.
Съществен недостатък на този вид регулатори е силната зависимост на
поддържащата сила от температурата на работното тяло, което се обуславя от
промяната на хидравличното съпротивление на дросела 15 при изменение на
вискозитета на течността. По такъв начин след промяна на температурата се
променя и първоначалната настройка на скоростния режим.
Електрическите регулатори за ъглова скорост с пряко действие могат да
бъдат съставени от електрически чувствителен елемент за ъглова скорост-
тахогенератор и изпълнителен механизъм – електромагнит . Възбуждането на
тахогенератора става или с помощта на постоянен магнит, или чрез
възбудителна намотка, захранена с постоянен ток. Намотката на електромаг-
нита е свързана към клемите на тахогенератора, а котвата му непосредствено с
рейката и посредством пружина с ръкохватката за управление на скоростния
режим.
Проведеният анализ показва, че поради свойствената за всички,
разгледани регулатори с пряко действие статична грешка, те не могат да се из-
ползват като основни във високо точните системи за стабилизация на ъгловата
скорост.
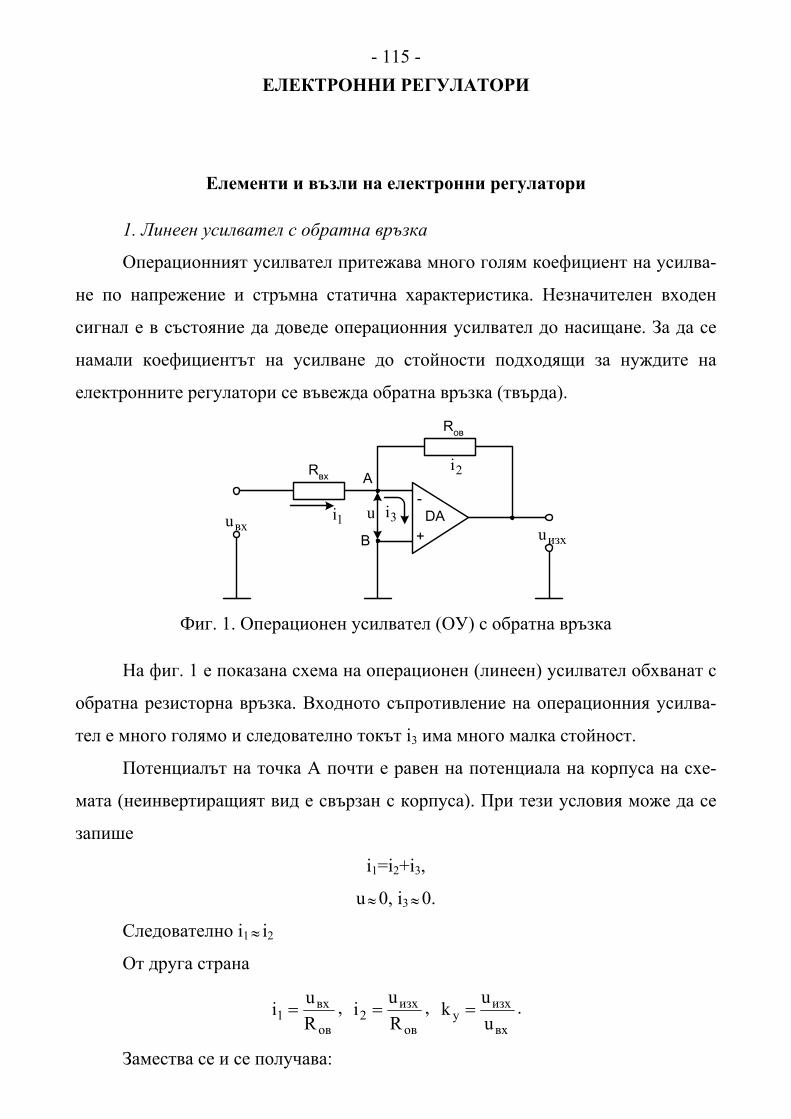
- 115 -ЕЛЕКТРОННИ РЕГУЛАТОРИ
Елементи и възли на електронни регулатори
1. Линеен усилвател с обратна връзка
Операционният усилвател притежава много голям коефициент на усилва-
не по напрежение и стръмна статична характеристика. Незначителен входен
сигнал е в състояние да доведе операционния усилвател до насищане. За да се
намали коефициентът на усилване до стойности подходящи за нуждите на
електронните регулатори се въвежда обратна връзка (твърда).
Rвх
Rов
изхuвхu 1i
2i
3i+
-DA
B
A
u
Фиг. 1. Операционен усилвател (ОУ) с обратна връзка
На фиг. 1 е показана схема на операционен (линеен) усилвател обхванат с
обратна резисторна връзка. Входното съпротивление на операционния усилва-
тел е много голямо и следователно токът i3 има много малка стойност.
Потенциалът на точка А почти е равен на потенциала на корпуса на схе-
мата (неинвертиращият вид е свързан с корпуса). При тези условия може да се
запише
i1=i2+i3,
u≈0, i3≈0.
Следователно i1≈ i2
От друга страна
ов
вх1 R
ui = , oв
изх2 R
ui = , вх
изхy u
uk = .
Замества се и се получава:
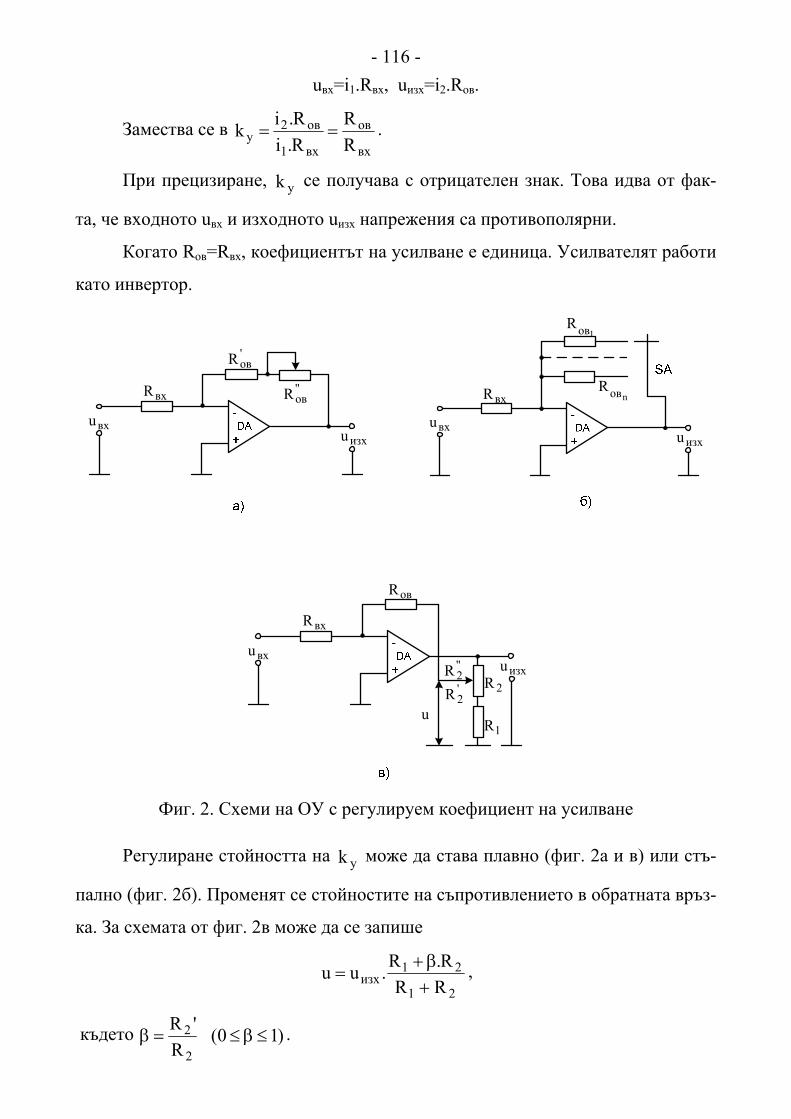
- 116 -uвх=i1.Rвх, uизх=i2.Rов.
Замества се в вх
oв
вх1
oв2y R
RR.iR.ik == .
При прецизиране, yk се получава с отрицателен знак. Това идва от фак-
та, че входното uвх и изходното uизх напрежения са противополярни.
Когато Rов=Rвх, коефициентът на усилване е единица. Усилвателят работи
като инвертор.
1овR
изхuвхu
"овRвхR
'овR
изхuвхu
вхR nовR
изхuвхu
вхR
овR
1R
2R'2R
"2R
u
Фиг. 2. Схеми на ОУ с регулируем коефициент на усилване
Регулиране стойността на yk може да става плавно (фиг. 2а и в) или стъ-
пално (фиг. 2б). Променят се стойностите на съпротивлението в обратната връз-
ка. За схемата от фиг. 2в може да се запише
21
21изх RR
R.R.uu+β+
= ,
където 2
2R
'R=β )10( ≤β≤ .
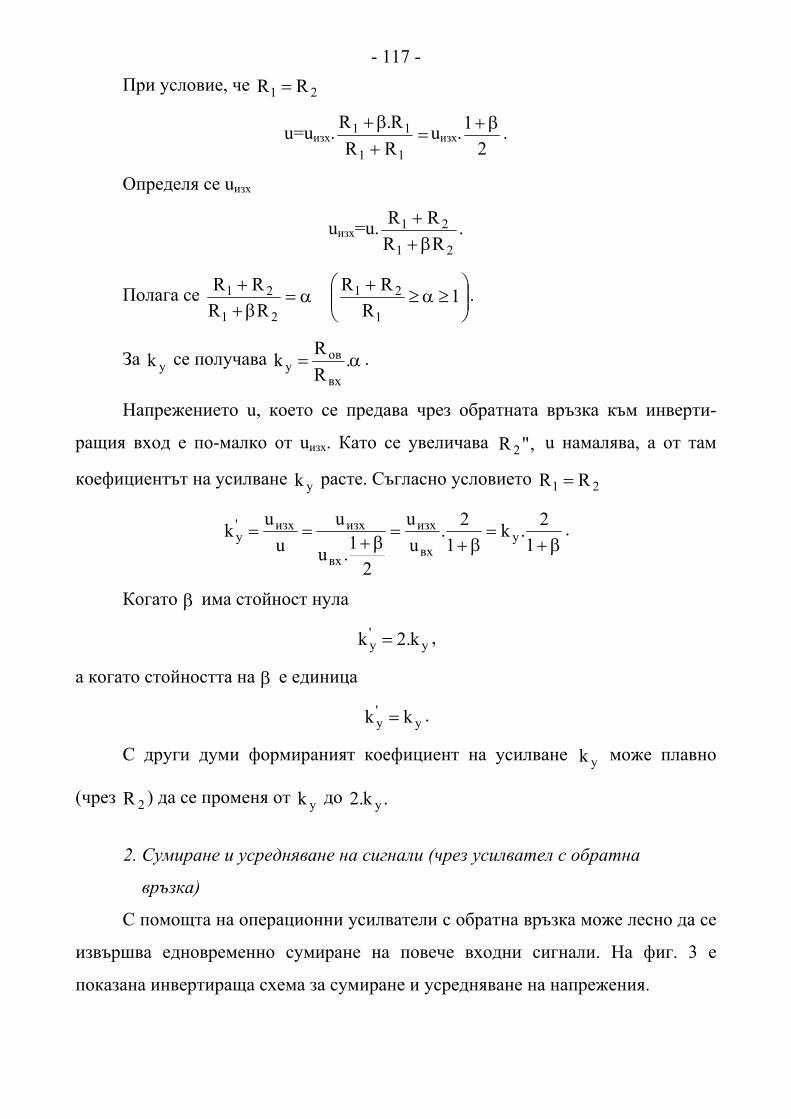
- 117 -При условие, че 21 RR =
u=uизх. =+β+
11
11
RRR.R uизх.
21 β+ .
Определя се uизх
uизх=u.21
21RR
RRβ++ .
Полага се α=β++
21
21RR
RR ⎟⎟⎠
⎞⎜⎜⎝
⎛≥α≥
+ 1R
RR
1
21 .
За yk се получава α= .RRkвх
oвy .
Напрежението u, което се предава чрез обратната връзка към инверти-
ращия вход е по-малко от uизх. Като се увеличава ,"R 2 u намалява, а от там
коефициентът на усилване yk расте. Съгласно условието 21 RR =
β+=
β+=
β+==
12.k
12.
uu
21.u
uu
uk yвх
изх
вх
изхизх'у .
Когато β има стойност нула
y'у k.2k = ,
а когато стойността на β е единица
y'у kk = .
С други думи формираният коефициент на усилване yk може плавно
(чрез 2R ) да се променя от yk до .k.2 y
2. Сумиране и усредняване на сигнали (чрез усилвател с обратна
връзка)
С помощта на операционни усилватели с обратна връзка може лесно да се
извършва едновременно сумиране на повече входни сигнали. На фиг. 3 е
показана инвертираща схема за сумиране и усредняване на напрежения.
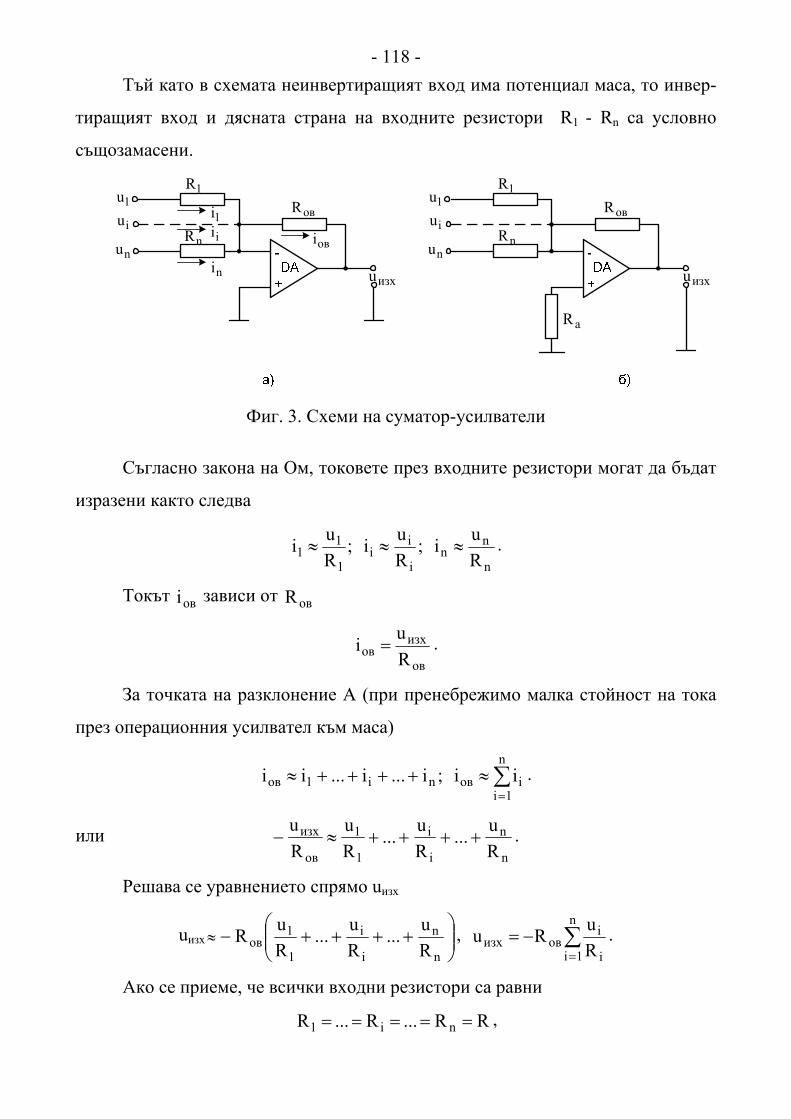
- 118 -Тъй като в схемата неинвертиращият вход има потенциал маса, то инвер-
тиращият вход и дясната страна на входните резистори R1 - Rn са условно
същозамасени.
1u
iu
nu
1iii
ni
nR
1R
овR
овi
изхu
1u
iu
nu nR
1R
овR
изхu
аR
Фиг. 3. Схеми на суматор-усилватели
Съгласно закона на Ом, токовете през входните резистори могат да бъдат
изразени както следва
n
nn
i
ii
1
11 R
ui;Rui;
Rui ≈≈≈ .
Токът oвi зависи от oвR
oв
изхoв R
ui = .
За точката на разклонение А (при пренебрежимо малка стойност на тока
през операционния усилвател към маса)
∑=
≈++++≈n
1iioвni1oв ii;i...i...ii .
или n
n
i
i
1
1
oв
изх
Ru...
Ru...
Ru
Ru
++++≈− .
Решава се уравнението спрямо uизх
uизх≈ ⎟⎟⎠
⎞⎜⎜⎝
⎛++++−
n
n
i
i
1
1oв R
u...Ru...
RuR , ∑
=−=
n
1i i
ioвизх R
uRu .
Ако се приеме, че всички входни резистори са равни
RR...R...R ni1 ===== ,
- 119 -
тогава се получава израза uизх= )u...u...u.(R
Rni1
oв ++++− .
Изходното напрежение uизх става равно на сумата от входните, при кое-
фициент на усилване 1k y =
uизх= )и...u....u( ni1 ++++− , uизх= ∑=
−n
1iiu .
За стабилизация на работата на схемата от фиг. 3а, към неинвертиращия
вход се присъединява резистор Ra (фиг. 3б), чиято стойност е равна на еквива-
лентното съпротивление от стойностите на входните резистори R1÷Rn и oвR
Ra= .
R1
R1...
R1...
R1
1
oвni1+++++
При различни стойности на резисторите от входа и обратната връзка,
схемата извършва усредняване и едновременно усилване.
3. Интегриране на сигнали (чрез усилвател с обратна връзка)
В схемата от фиг. 4а, вместо резистор, във веригата за обратна връзка е
поставен кондензатор. В този случай, изходното напрежение по форма пред-
ставлява отрицателен интеграл от входното напрежение.
изхuвхu
R
i
ci
cu
C
изхuвхu R
nC
1C
Фиг. 4. Схеми на интегратор
И тук се извършват същите допускания, както в преди това разгледаните
схеми. Потенциалът на точка А е равен на потенциала на масата. Тогава може
да се запише:
i =R
uвх .
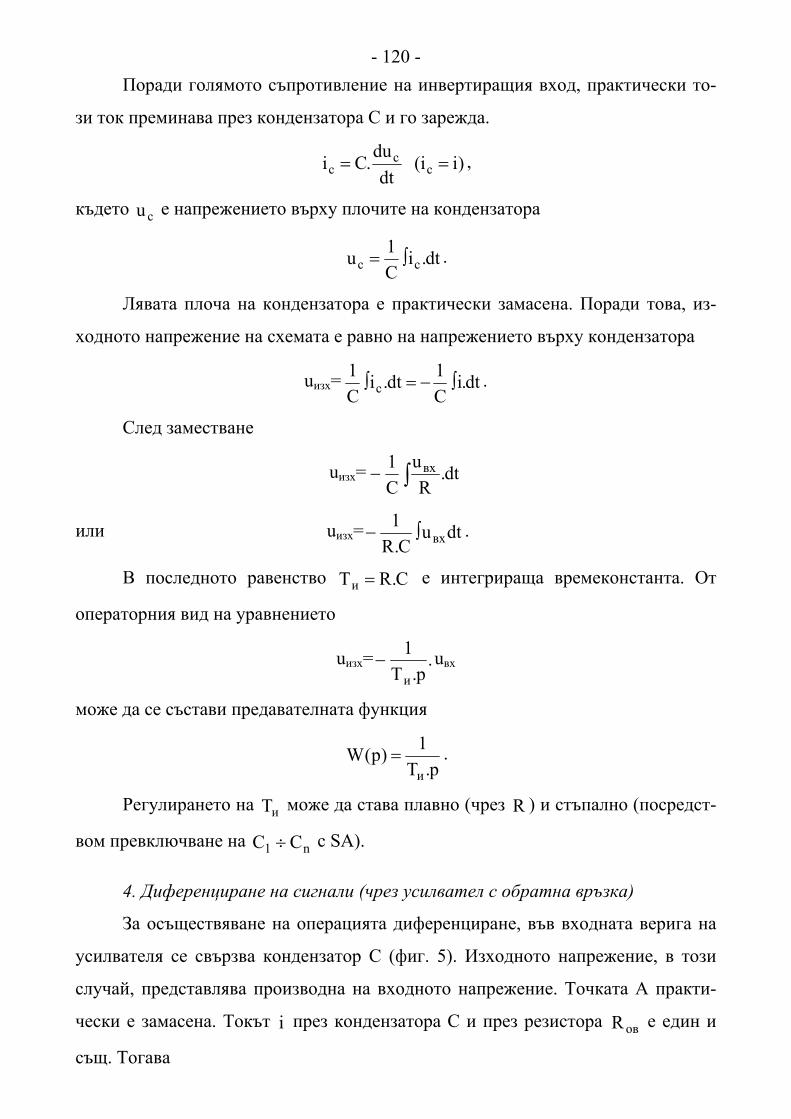
- 120 -Поради голямото съпротивление на инвертиращия вход, практически то-
зи ток преминава през кондензатора С и го зарежда.
)ii(dt
du.Ci cc
c == ,
където cu е напрежението върху плочите на кондензатора
dt.iC1u cc ∫= .
Лявата плоча на кондензатора е практически замасена. Поради това, из-
ходното напрежение на схемата е равно на напрежението върху кондензатора
uизх= dt.iC1dt.i
C1
c ∫−=∫ .
След заместване
uизх= ∫− dt.R
uC1 вх
или uизх= dtuС.R
1вх∫− .
В последното равенство C.RТи = е интегрираща времеконстанта. От
операторния вид на уравнението
uизх= .р.Т
1
и− uвх
може да се състави предавателната функция
p.T1)p(Wи
= .
Регулирането на иT може да става плавно (чрез R ) и стъпално (посредст-
вом превключване на n1 СС ÷ с SA).
4. Диференциране на сигнали (чрез усилвател с обратна връзка)
За осъществяване на операцията диференциране, във входната верига на
усилвателя се свързва кондензатор С (фиг. 5). Изходното напрежение, в този
случай, представлява производна на входното напрежение. Точката А практи-
чески е замасена. Токът i през кондензатора С и през резистора oвR е един и
същ. Тогава
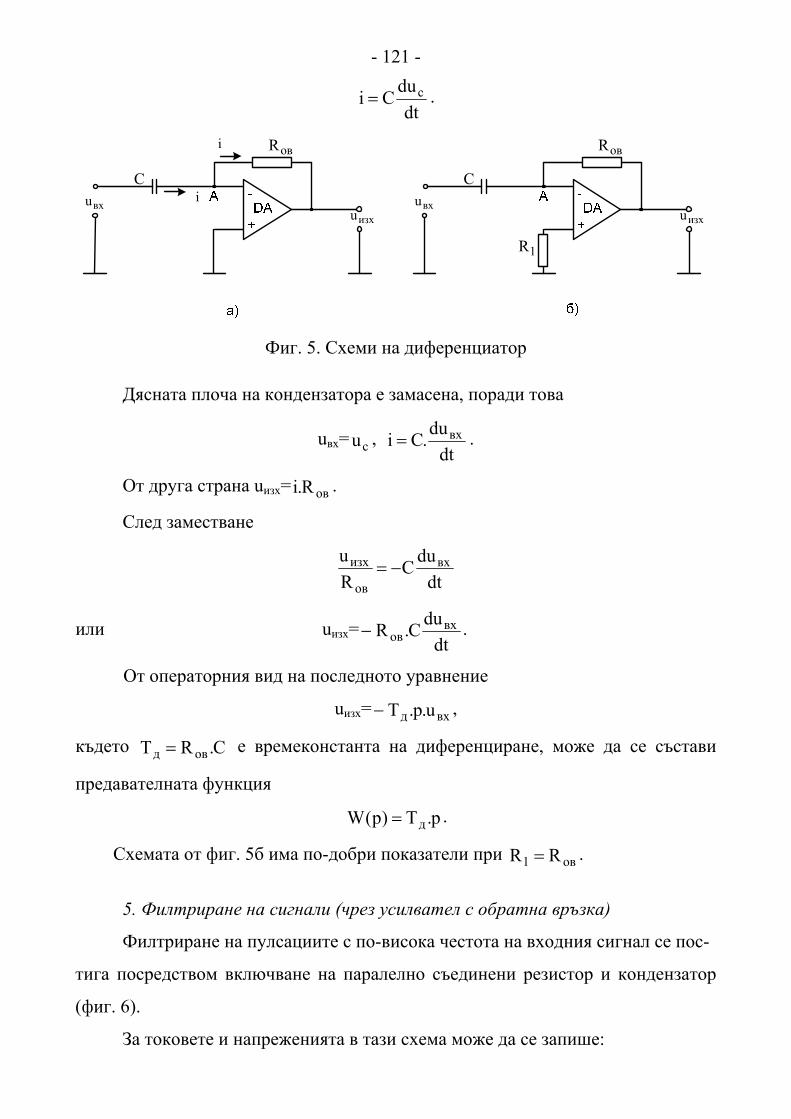
- 121 -
dtduСi c= .
изхuвхu i
i овR
С
изхuвхu
овR
С
1R
Фиг. 5. Схеми на диференциатор
Дясната плоча на кондензатора е замасена, поради това
uвх= сu , dt
du.Ci вх= .
От друга страна uизх= овR.i .
След заместване
dtduC
Ru вх
oв
изх −=
или uизх=dt
duC.R вхoв− .
От операторния вид на последното уравнение
uизх= вхд u.р.Т− ,
където C.RТ oвд = е времеконстанта на диференциране, може да се състави
предавателната функция
р.Т)p(W д= .
Схемата от фиг. 5б има по-добри показатели при oв1 RR = .
5. Филтриране на сигнали (чрез усилвател с обратна връзка)
Филтриране на пулсациите с по-висока честота на входния сигнал се пос-
тига посредством включване на паралелно съединени резистор и кондензатор
(фиг. 6).
За токовете и напреженията в тази схема може да се запише:
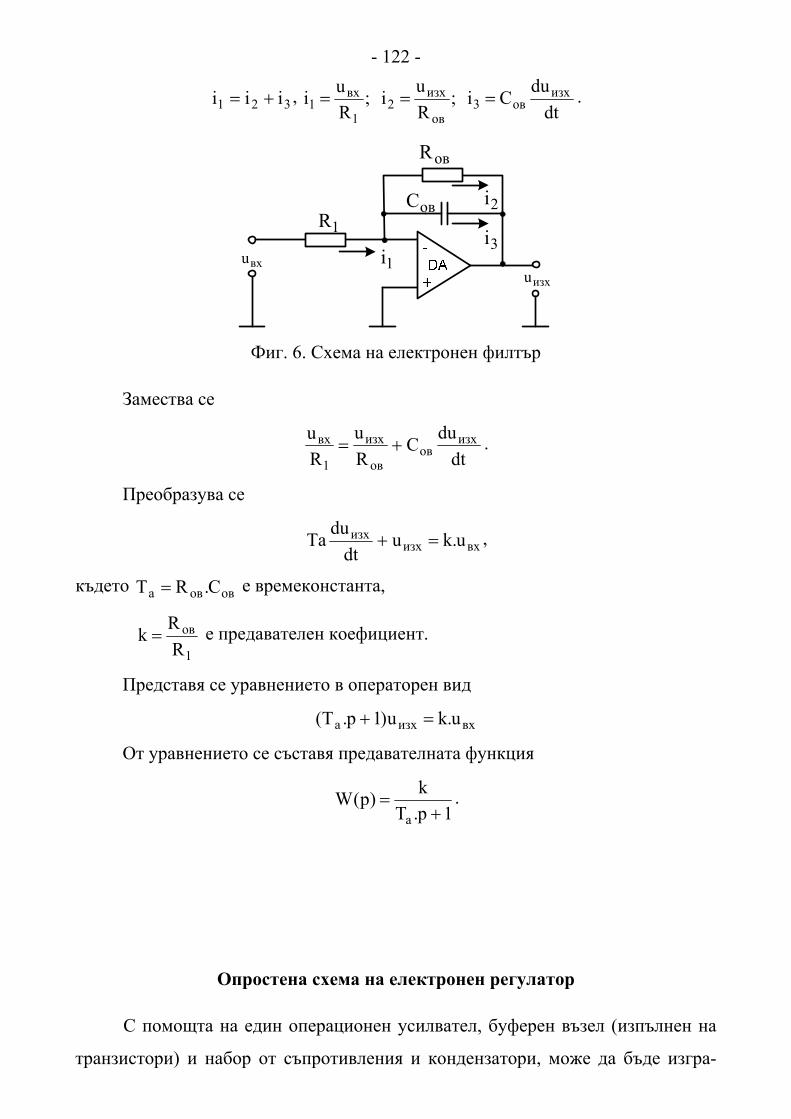
- 122 -
321 iii += , dt
duCi;Rui;
Rui изх
oв3oв
изх2
1
вх1 === .
изхuвхu
1R
овR
овС
1i
2i
3i
Фиг. 6. Схема на електронен филтър
Замества се
dtduC
Ru
Ru изх
овoв
изх
1
вх += .
Преобразува се
вхизхизх u.ku
dtduТа =+ ,
където овoва C.RТ = е времеконстанта,
1
oв
RRk = е предавателен коефициент.
Представя се уравнението в операторен вид
вхизха u.ku)1р.Т( =+
От уравнението се съставя предавателната функция
1p.Tk)p(W
a += .
Опростена схема на електронен регулатор
С помощта на един операционен усилвател, буферен възел (изпълнен на
транзистори) и набор от съпротивления и кондензатори, може да бъде изгра-
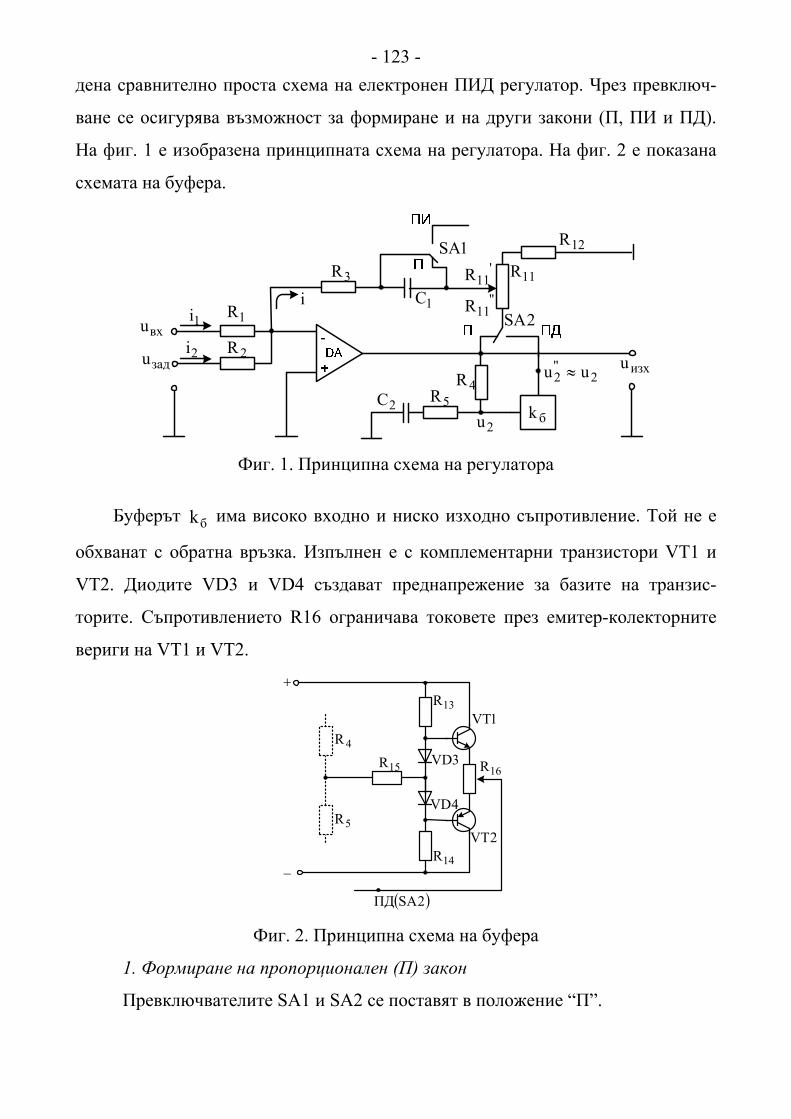
- 123 -дена сравнително проста схема на електронен ПИД регулатор. Чрез превключ-
ване се осигурява възможност за формиране и на други закони (П, ПИ и ПД).
На фиг. 1 е изобразена принципната схема на регулатора. На фиг. 2 е показана
схемата на буфера.
изхu
вхu
задu
1С
2С 5R
1SA
2SA
4R
11R12R
'11R
"11R
2u
2"2 uu ≈
1R1i
2i
i
2R
3R
бk
Фиг. 1. Принципна схема на регулатoра
Буферът бk има високо входно и ниско изходно съпротивление. Той не е
обхванат с обратна връзка. Изпълнен е с комплементарни транзистори VT1 и
VT2. Диодите VD3 и VD4 създават преднапрежение за базите на транзис-
торите. Съпротивлението R16 ограничава токовете през емитер-колекторните
вериги на VT1 и VT2.
4R
5R
15R
13R
16R
14R2VT
1VT
3VD
4VD
( )2SAПД
+
−
Фиг. 2. Принципна схема на буфера
1. Формиране на пропорционален (П) закон
Превключвателите SA1 и SA2 се поставят в положение “П”.
- 124 -В този случай, кондензаторът С1 се шунтира, а обратната връзка (ОВ) се
присъединява направо към изхода на операционния усилвател DA.
Операционният усилвател изпълнява функциите на суматор. Той фор-
мира входното разсъгласуване uΔ
задвх uuu += .
Входният и задаващият сигнали са с противоположна полярност. При
условие ,RR 21 = може да се запише следния израз
α+= ).uu(RRu задвх
1
3изх ,
където
12'11
1211
RRRR
++
=α .
Коефициентът на регулатора pk може да се променя стъпално чрез 3R и
да се настройва плавно с .R11
..RR
k1
3p α=
Предавателната функция на П регулатора по разгледаната схема ще бъде
pk)p(W = .
2. Формиране на пропорционално-интегрален (ПИ) закон
Превключвателите SA1 и SA2 се поставят в положения както следва: SA1
– ПИ, SA2 – П.
Във веригата на обратната връзка кондензаторът С1 се оказва свързан
последователно на съпротивлението R3. Тогава относно връзката на изходното
с входните напрежения, в операторен вид, може да се запише
,).uu.(R
pC1R
u задвх1
13
изх α+
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛ +−=
)uuu( задвх Δ=+ ,
- 125 -
u.CpR
11.RRu
131
3изх Δ⎟⎟
⎠
⎞⎜⎜⎝
⎛+α−= ,
където
11
3p .
RRk α−= ,
а иT е времеконстанта на интегриране
13и СRT = .
От операторния вид на уравнението може да се премине към съответната
предавателна функция.
u.p.T
11kuи
pизх Δ⎟⎟⎠
⎞⎜⎜⎝
⎛+= ,
=)p(W ⎟⎟⎠
⎞⎜⎜⎝
⎛+
p.T11kи
p .
В този случай настройката на pk се извършва чрез 11R , а иТ може да се
променя посредством 3R и 1С .
3. Формиране на пропорционално-диференциален (ПД) закон
Превключвателите SA1 и SA2 се превключват в следните положения: SA1
– П, SA2 – ПД.
В схемата от фиг. 1, кондензаторът С1 отново се дава накъсо. Изходът
(краят) на обратната връзка през буфера бk се присъединява към точката с
потенциал 2u . Коефициентът на усилване на буфера е приблизително единица
( 1kб ≈ ).
Напрежението 2u може да се определи по израза
254
25
изх2
pC1RR
pC1R
.uu++
+= .
Токът през веригата на обратната връзка i представлява сумата от токо-
вете 1i и 2i (пренебрегва се тока през операционния усилвател).
- 126 -
21 iii +=
или
1Rui Δ
= (при условие 21 RR = ).
Имайки предвид, че ,1kб ≈ то
α−=≈ .Z.iu*u oв22 ,
където oвZ е общо означение на съпротивлението в обратната връзка. В конк-
ретния случай тук 3oв RZ = .
След заместване се получава
254
25
изхoв1
2
pC1RR
pC1R
u.Z.R
u*u++
+=α
Δ−= .
Решава се уравнението спрямо изхu
,u..
pC1R
pC1RR
.RRu
25
254
1
3изх Δα
+
++−=
3oв RZ = ,
u.
pC1R
R1.RRu
25
4
1
3изх Δ
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
++α−= ,
α= .RR
u1
3изх u.
1RpCRC.p152
42 Δ⎟⎟⎠
⎞⎜⎜⎝
⎛+
+ .
Второто слагаемо в скобите представлява реално диференциращо звено
1р.Тр.Т
1RpCRрC
1д
д
52
42+
=+
,
където дТ е времеконстанта на диференциране
42д R.CТ = ;
1дд ТТ = при условие 54 RR = .
- 127 -Уравнението добива вида
u1р.Т
р.Т1ku
д
дpизх Δ⎟⎟
⎠
⎞⎜⎜⎝
⎛
++= .
По него се съставя предавателната функция на ПД-регулатора
⎟⎟⎠
⎞⎜⎜⎝
⎛+
+=1p.Т
p.Т1.k)p(W
д
дp .
Времеконстантата може да се променя стъпално или плавно чрез
стойностите на елементите, които я формират ( 42д RСТ = ).
4. Формиране на пропорционално-интегрално-диференциален (ПИД)закон
Превключвателите SA1 и SA2 се поставят в положения съответно: SA1 –
ПИ, SA2 – ПД.
Във веригата на обратната връзка се включват кондензаторът С1 и буферът
бk .
Извършват се разсъждения, аналогични на предходните за ПД закон
254
25
изх2
pC1RR
pC1R
uu++
+= , )1k( б ≈ ,
),RR(;R
ui 211
=Δ
=
α−=≈ .Z.iu*u oв22 .
За разглеждания вариант
13oв pC
1RZ += .
След заместване се получава
254
25
изх1
13
pC1RR
pC1R
.u.R
pC1R
.u++
+−=α
+Δ .
Решава се уравнението спрямо изхu

- 128 -
u..
pC1R
pC1RR
.R
pC1R
u
25
254
1
13
изх Δα+
+++−= .
След преобразуване се достига до израза:
u.1pCR
pCR1.pCR
11.RRu
25
24
131
3изх Δ⎟⎟
⎠
⎞⎜⎜⎝
⎛+
+⎟⎟⎠
⎞⎜⎜⎝
⎛+α−= ,
u.)1pCR(CR
CRpCR
11pCR
pCR1.RRu
2513
24
1325
24
1
3изх Δ⎥
⎦
⎤⎢⎣
⎡+
+++
+α−= .
В последното уравнение първото слагаемо (в скобите) съответства на
пропорционално звено, второто – на реално диференциращо звено, третото – на
интегриращо звено и четвъртото на апериодично ( паразитно) звено.
За изхu може да се запише
u.1р.Т
kр.Т
11р.Т
р.Т1ku
а
a
и1д
дpизх Δ⎟
⎟⎠
⎞⎜⎜⎝
⎛
+++
++−= ,
където
;.RRk
1
3p α=
;CRТ 24д =
;CRТТ 25а1д ==
;CRT 13и =
и
д
13
24a Т
ТCRCRk == .
Предавателната функция на ПИД-регулатора ще има следния вид
⎟⎟⎠
⎞⎜⎜⎝
⎛
+++
++=
1р.Тk
р.Т1
1р.Тр.Т
1k)p(Wа
a
и1д
дp .
Електронни регулатори
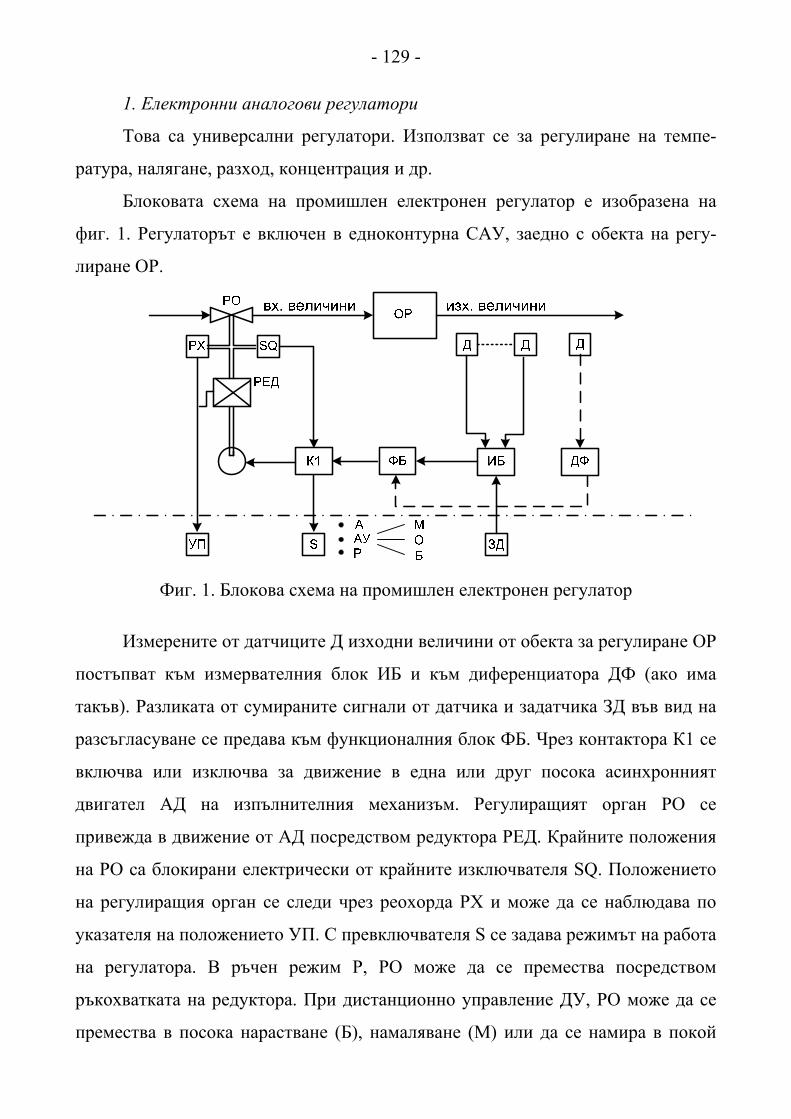
- 129 -
1. Електронни аналогови регулатори
Това са универсални регулатори. Използват се за регулиране на темпе-
ратура, налягане, разход, концентрация и др.
Блоковата схема на промишлен електронен регулатор е изобразена на
фиг. 1. Регулаторът е включен в едноконтурна САУ, заедно с обекта на регу-
лиране ОР.
Фиг. 1. Блокова схема на промишлен електронен регулатор
Измерените от датчиците Д изходни величини от обекта за регулиране ОР
постъпват към измервателния блок ИБ и към диференциатора ДФ (ако има
такъв). Разликата от сумираните сигнали от датчика и задатчика ЗД във вид на
разсъгласуване се предава към функционалния блок ФБ. Чрез контактора К1 се
включва или изключва за движение в една или друг посока асинхронният
двигател АД на изпълнителния механизъм. Регулиращият орган РО се
привежда в движение от АД посредством редуктора РЕД. Крайните положения
на РО са блокирани електрически от крайните изключвателя SQ. Положението
на регулиращия орган се следи чрез реохорда РХ и може да се наблюдава по
указателя на положението УП. С превключвателя S се задава режимът на работа
на регулатора. В ръчен режим Р, РО може да се премества посредством
ръкохватката на редуктора. При дистанционно управление ДУ, РО може да се
премества в посока нарастване (Б), намаляване (М) или да се намира в покой
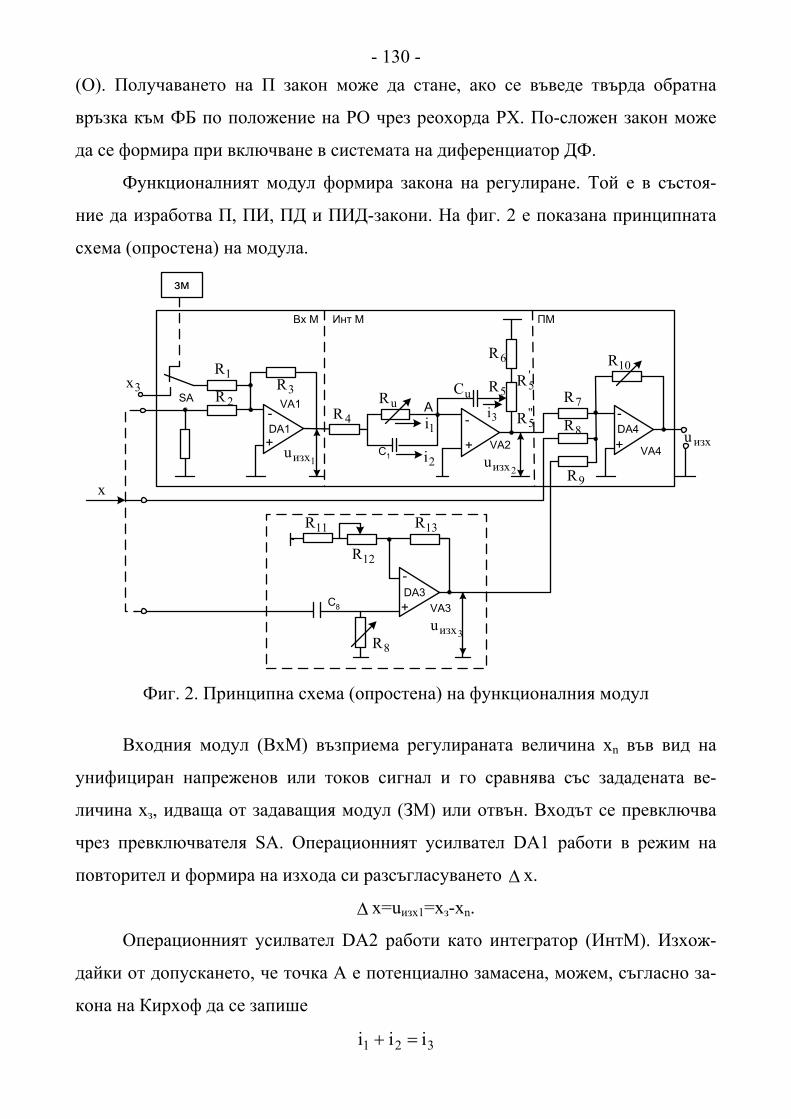
- 130 -(О). Получаването на П закон може да стане, ако се въведе твърда обратна
връзка към ФБ по положение на РО чрез реохорда РХ. По-сложен закон може
да се формира при включване в системата на диференциатор ДФ.
Функционалният модул формира закона на регулиране. Той е в състоя-
ние да изработва П, ПИ, ПД и ПИД-закони. На фиг. 2 е показана принципната
схема (опростена) на модула.
изхu
3R
+
-DA1
1R
2R
+
-
uС
1i3i
2i+
-
+
-
зм
11R
4R5R
6R
7R
8R
9R
10R
8R
12R
13R
DA3
DA4
SA
C8
C1
2изхu1изхu
3изхu
Инт М
VA3
VA4
VA1
VA2
uR
Вх М ПМ
3x
x
'5R
"5R
А
Фиг. 2. Принципна схема (опростена) на функционалния модул
Входния модул (ВхМ) възприема регулираната величина хn във вид на
унифициран напреженов или токов сигнал и го сравнява със зададената ве-
личина хз, идваща от задаващия модул (ЗМ) или отвън. Входът се превключва
чрез превключвателя SA. Операционният усилвател DA1 работи в режим на
повторител и формира на изхода си разсъгласуването Δ х.
Δ х=uизх1=хз-хn.
Операционният усилвател DA2 работи като интегратор (ИнтМ). Изхож-
дайки от допускането, че точка А е потенциално замасена, можем, съгласно за-
кона на Кирхоф да се запише
321 iii =+
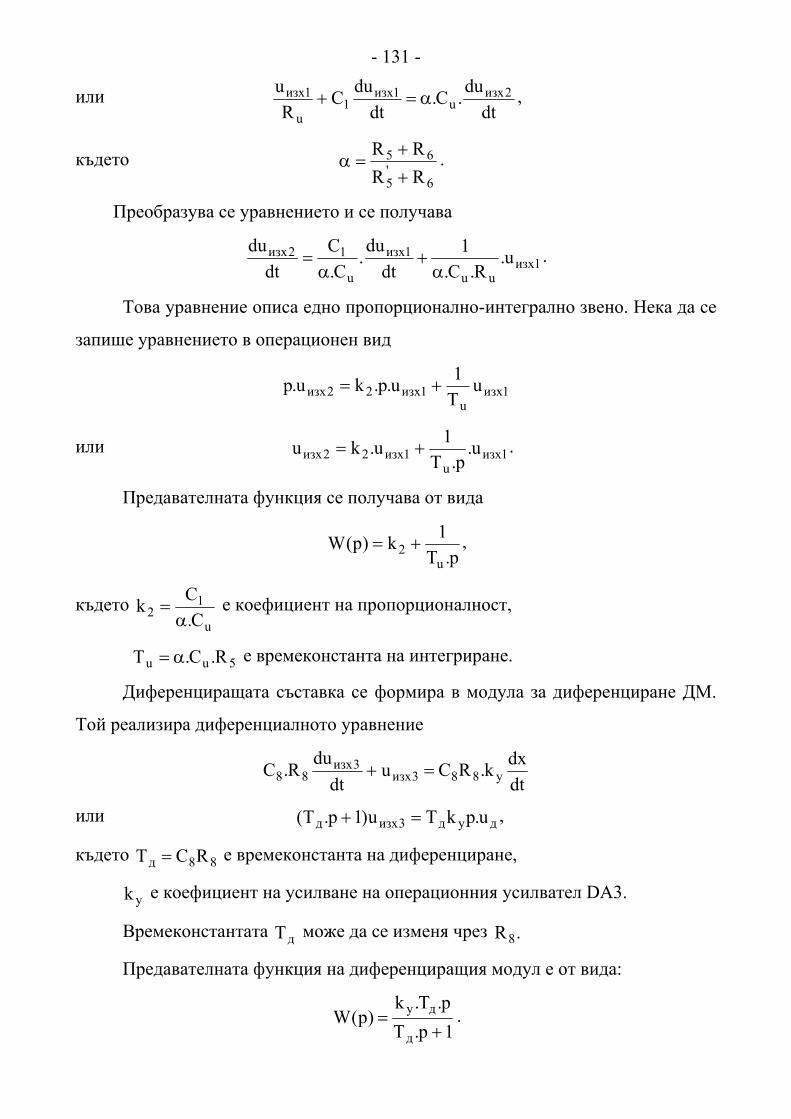
- 131 -
или dt
du.С.dt
duСR
u 2изхu
1изх1
u
1изх α=+ ,
където 6
'5
65
RRRR
++
=α .
Преобразува се уравнението и се получава
1изхuu
1изх
u
12изх u.R.С.
1dt
du.С.С
dtdu
α+
α= .
Това уравнение описа едно пропорционално-интегрално звено. Нека да се
запише уравнението в операционен вид
1изхu
1изх22изх uТ1u.p.ku.р +=
или 1изхu
1изх22изх u.р.Т
1u.ku += .
Прeдавателната функция се получава от вида
p.T1k)p(Wu
2 += ,
където u
12 С.
Сkα
= е коефициент на пропорционалност,
5uu R.С.Т α= е времеконстанта на интегриране.
Диференциращата съставка се формира в модула за диференциране ДМ.
Той реализира диференциалното уравнение
dtdxk.RСu
dtduR.С у883изх
3изх88 =+
или дуд3изхд u.pkТu)1р.Т( =+ ,
където 88д RCТ = е времеконстанта на диференциране,
yk е коефициент на усилване на операционния усилвател DA3.
Времеконстантата дТ може да се изменя чрез .R8
Предавателната функция на диференциращия модул е от вида:
1р.Тр.T.k
)p(Wд
дy
+= .
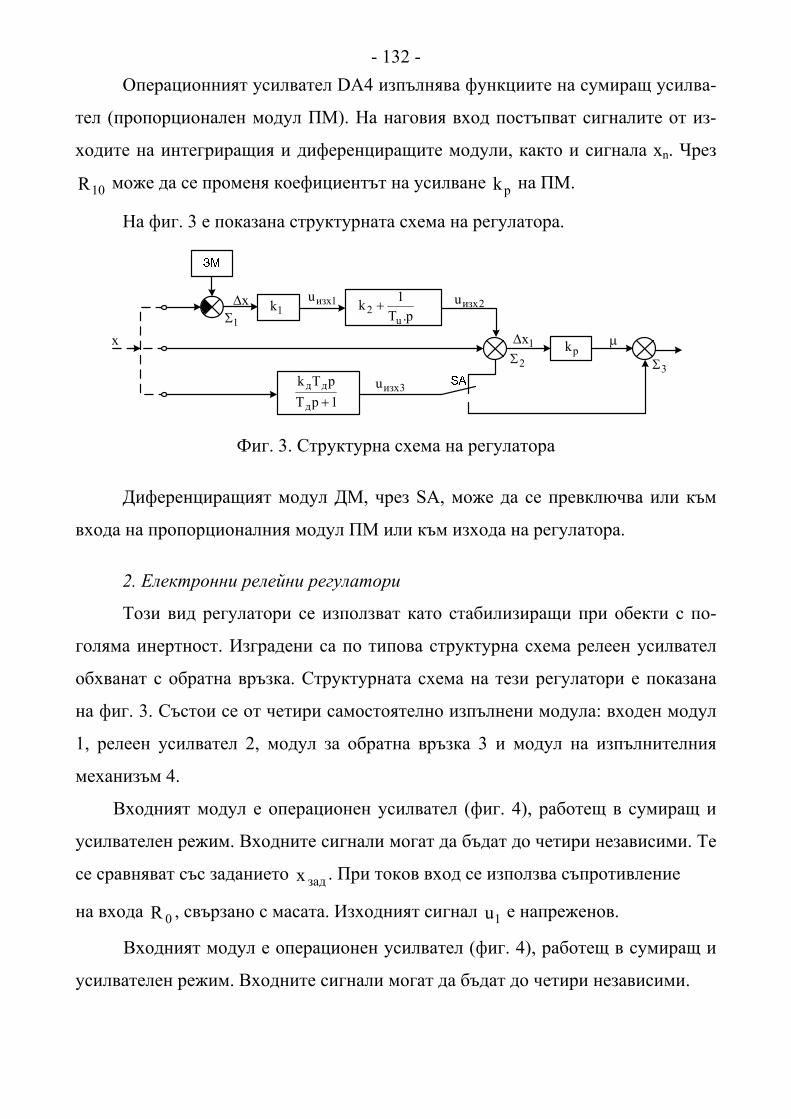
- 132 -Операционният усилвател DA4 изпълнява функциите на сумиращ усилва-
тел (пропорционален модул ПМ). На наговия вход постъпват сигналите от из-
ходите на интегриращия и диференциращите модули, както и сигнала хn. Чрез
10R може да се променя коефициентът на усилване pk на ПМ.
На фиг. 3 е показана структурната схема на регулатора.
1kxΔ
1xΔ
2изхu1изхu
xpk
3изхu
1Σ
2Σ 3Σ
p.T1ku
2 +
μ
1рТрТk
д
дд+
Фиг. 3. Структурна схема на регулатора
Диференциращият модул ДМ, чрез SA, може да се превключва или към
входа на пропорционалния модул ПМ или към изхода на регулатора.
2. Електронни релейни регулатори
Този вид регулатори се използват като стабилизиращи при обекти с по-
голяма инертност. Изградени са по типова структурна схема релеен усилвател
обхванат с обратна връзка. Структурната схема на тези регулатори е показана
на фиг. 3. Състои се от четири самостоятелно изпълнени модула: входен модул
1, релеен усилвател 2, модул за обратна връзка 3 и модул на изпълнителния
механизъм 4.
Входният модул е операционен усилвател (фиг. 4), работещ в сумиращ и
усилвателен режим. Входните сигнали могат да бъдат до четири независими. Те
се сравняват със заданието задх . При токов вход се използва съпротивление
на входа 0R , свързано с масата. Изходният сигнал 1u е напреженов.
Входният модул е операционен усилвател (фиг. 4), работещ в сумиращ и
усилвателен режим. Входните сигнали могат да бъдат до четири независими.
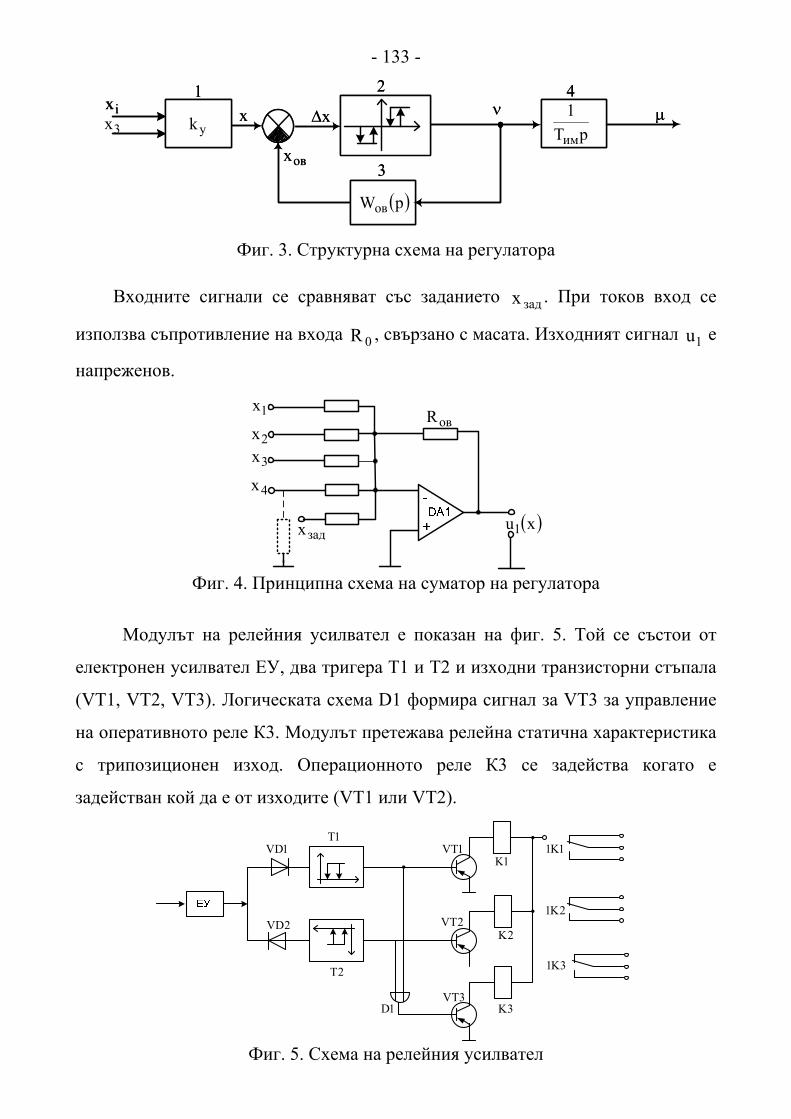
- 133 -
рT1
им
νxΔ
( )рWов
yk μxix
овx
1
3
2 4
рT1
им
νxΔ
( )рWов
yk μx3хix
овx
1
3
2 4
Фиг. 3. Структурна схема на регулатора
Входните сигнали се сравняват със заданието задх . При токов вход се
използва съпротивление на входа 0R , свързано с масата. Изходният сигнал 1u е
напреженов.
1x
задx
2x3x
4x
овR
( )xu1
Фиг. 4. Принципна схема на суматор на регулатора
Модулът на релейния усилвател е показан на фиг. 5. Той се състои от
електронен усилвател ЕУ, два тригера T1 и Т2 и изходни транзисторни стъпала
(VT1, VT2, VT3). Логическата схема D1 формира сигнал за VT3 за управление
на оперативното реле К3. Модулът претежава релейна статична характеристика
с трипозиционен изход. Операционното реле К3 се задейства когато е
задействан кой да е от изходите (VT1 или VT2).
1VD
2VD
1T
2T
1VT
2VT
3VT
1K
1D
2K
3K
1K1
2K1
3K1
Фиг. 5. Схема на релейния усилвател
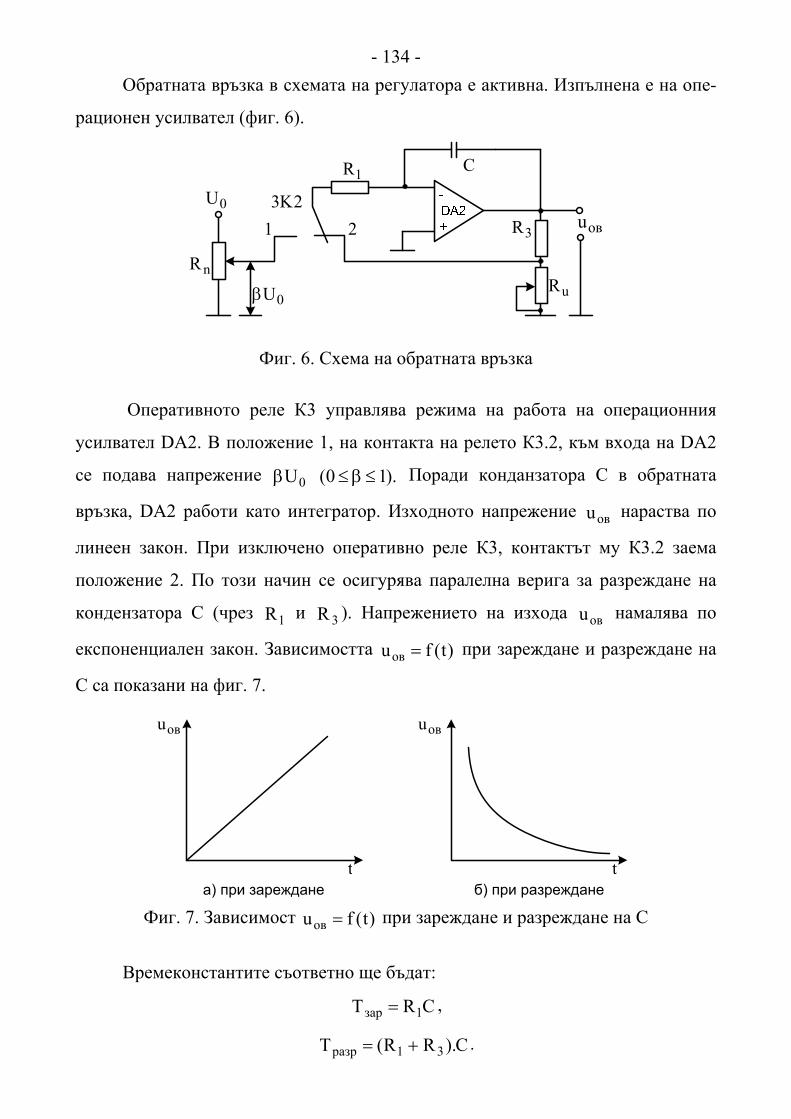
- 134 -Обратната връзка в схемата на регулатора е активна. Изпълнена е на опе-
рационен усилвател (фиг. 6).
овu
1R
uR
3R
nR
0Uβ
1
C
20U 2K3
Фиг. 6. Схема на обратната връзка
Оперативното реле К3 управлява режима на работа на операционния
усилвател DA2. В положение 1, на контакта на релето К3.2, към входа на DA2
се подава напрежение ).10(U0 ≤β≤β Поради конданзатора С в обратната
връзка, DA2 работи като интегратор. Изходното напрежение овu нараства по
линеен закон. При изключено оперативно реле К3, контактът му К3.2 заема
положение 2. По този начин се осигурява паралелна верига за разреждане на
кондензатора С (чрез 1R и 3R ). Напрежението на изхода овu намалява по
експоненциален закон. Зависимостта )t(fuов = при зареждане и разреждане на
С са показани на фиг. 7.
овu овu
t tа) при зареждане б) при разреждане
Фиг. 7. Зависимост )t(fuов = при зареждане и разреждане на С
Времеконстантите съответно ще бъдат:
CRТ 1зар = ,
C).RR(Т 31разр += .
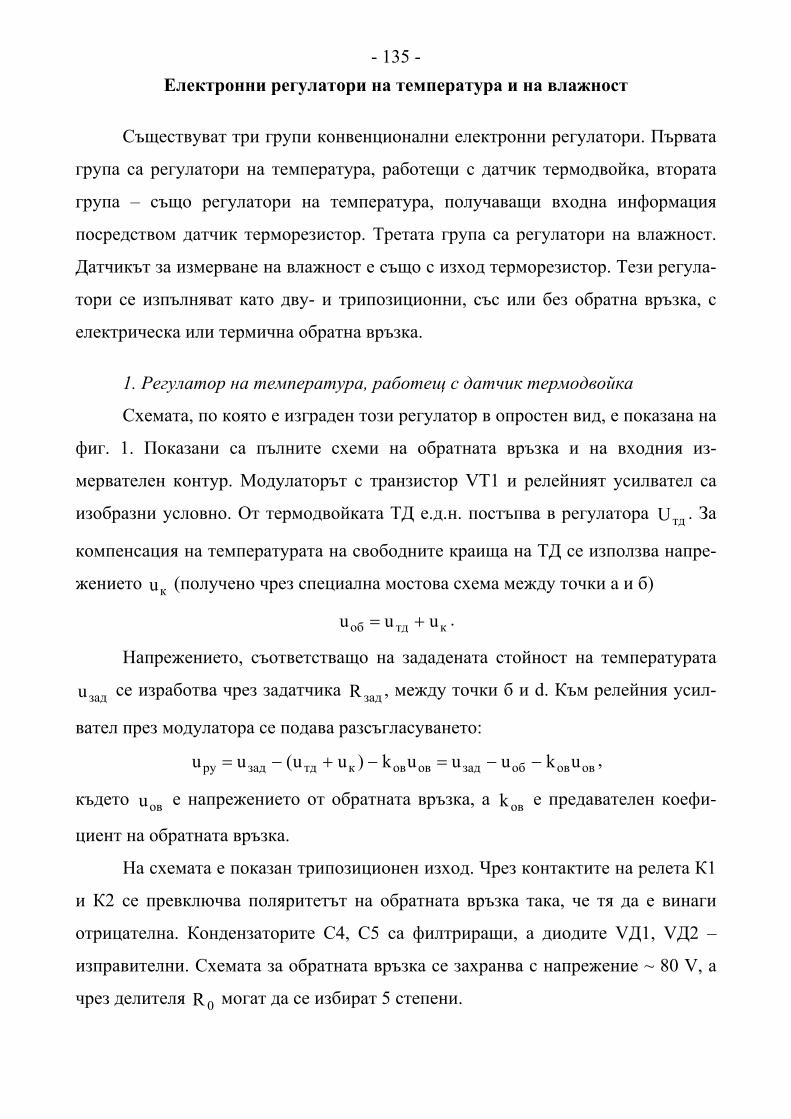
- 135 -Електронни регулатори на температура и на влажност
Съществуват три групи конвенционални електронни регулатори. Първата
група са регулатори на температура, работещи с датчик термодвойка, втората
група – също регулатори на температура, получаващи входна информация
посредством датчик терморезистор. Третата група са регулатори на влажност.
Датчикът за измерване на влажност е също с изход терморезистор. Тези регула-
тори се изпълняват като дву- и трипозиционни, със или без обратна връзка, с
електрическа или термична обратна връзка.
1. Регулатор на температура, работещ с датчик термодвойка
Схемата, по която е изграден този регулатор в опростен вид, е показана на
фиг. 1. Показани са пълните схеми на обратната връзка и на входния из-
мервателен контур. Модулаторът с транзистор VT1 и релейният усилвател са
изобразни условно. От термодвойката ТД е.д.н. постъпва в регулатора тдU . За
компенсация на температурата на свободните краища на ТД се използва напре-
жението кu (получено чрез специална мостова схема между точки а и б)
ктдоб uuu += .
Напрежението, съответстващо на зададената стойност на температурата
задu се изработва чрез задатчика задR , между точки б и d. Към релейния усил-
вател през модулатора се подава разсъгласуването:
ововобзадововктдзадру ukuuuk)uu(uu −−=−+−= ,
където овu е напрежението от обратната връзка, а овk е предавателен коефи-
циент на обратната връзка.
На схемата е показан трипозиционен изход. Чрез контактите на релета К1
и К2 се превключва поляритетът на обратната връзка така, че тя да е винаги
отрицателна. Кондензаторите С4, С5 са филтриращи, а диодите VД1, VД2 –
изправителни. Схемата за обратната връзка се захранва с напрежение ~ 80 V, а
чрез делителя 0R могат да се избират 5 степени.

- 136 -
1R
+ +− −
7R
1R
0R8R
0R
0R
0R
0R
V80~
12
3
4
5
задR
6R
1 3
9R
9R456
789
Фиг. 1. Опростена схема на регулатор, работещ с датчик термодвойка
Обратната връзка (ОВ) е инерционна във вид на апериодично звено.
Времеконстантата на ОВ може да бъде различна за положение “включване” и за
положение “изключване”. При включване например на реле К1, кондензаторът
С8 се зарежда през диода VД1 и съпротивление R8. При изключване на К1, С8
се разрежда през затворените контакти на К1 и К2 през R7. Напрежението на
обратната връзка нараства и намалява с времеконстанти съответно
oв72овoв81ов С.RТ,С.RТ == .
Структурната схема на регулатора се свежда до типова структура с ре-
леен усилвател в правия тракт, обхванат с инерционна обратна връзка (фиг. 2).
При двупозиционен изход (или при работа само на едното реле) и пропор-
ционален изпълнителен механизъм, този регулатор формира приблизително ПД
закон на регулиране.
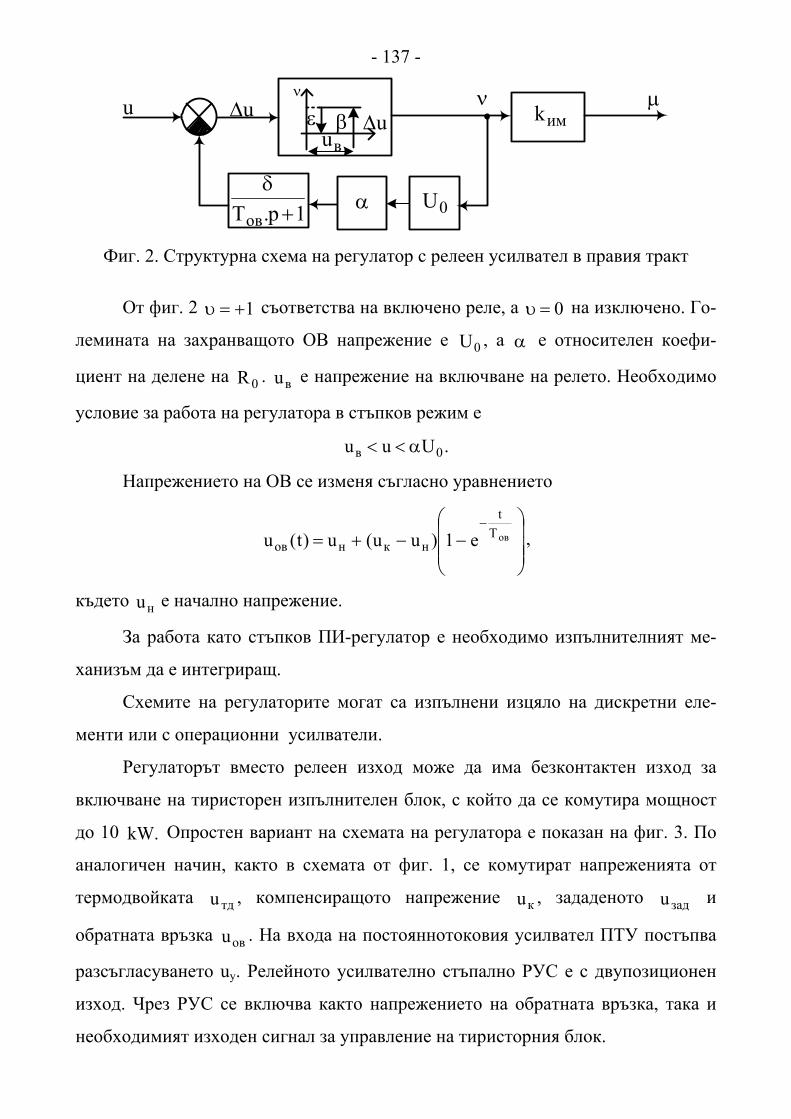
- 137 -
имkμ
1р.Тов +δ
α
νuΔ
νu uΔ
вuβε
0U
Фиг. 2. Структурна схема на регулатор с релеен усилвател в правия тракт
От фиг. 2 1+=υ съответства на включено реле, а 0=υ на изключено. Го-
лемината на захранващото ОВ напрежение е 0U , а α е относителен коефи-
циент на делене на 0R . вu е напрежение на включване на релето. Необходимо
условие за работа на регулатора в стъпков режим е
.Uuu 0в α<<
Напрежението на ОВ се изменя съгласно уравнението
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−−+=
−овТt
нкнов е1)uu(u)t(u ,
където нu е начално напрежение.
За работа като стъпков ПИ-регулатор е необходимо изпълнителният ме-
ханизъм да е интегриращ.
Схемите на регулаторите могат са изпълнени изцяло на дискретни еле-
менти или с операционни усилватели.
Регулаторът вместо релеен изход може да има безконтактен изход за
включване на тиристорен изпълнителен блок, с който да се комутира мощност
до 10 .kW Опростен вариант на схемата на регулатора е показан на фиг. 3. По
аналогичен начин, както в схемата от фиг. 1, се комутират напреженията от
термодвойката тдu , компенсиращото напрежение кu , зададеното задu и
обратната връзка овu . На входа на постояннотоковия усилвател ПТУ постъпва
разсъгласуването uу. Релейното усилвателно стъпално РУС е с двупозиционен
изход. Чрез РУС се включва както напрежението на обратната връзка, така и
необходимият изходен сигнал за управление на тиристорния блок.
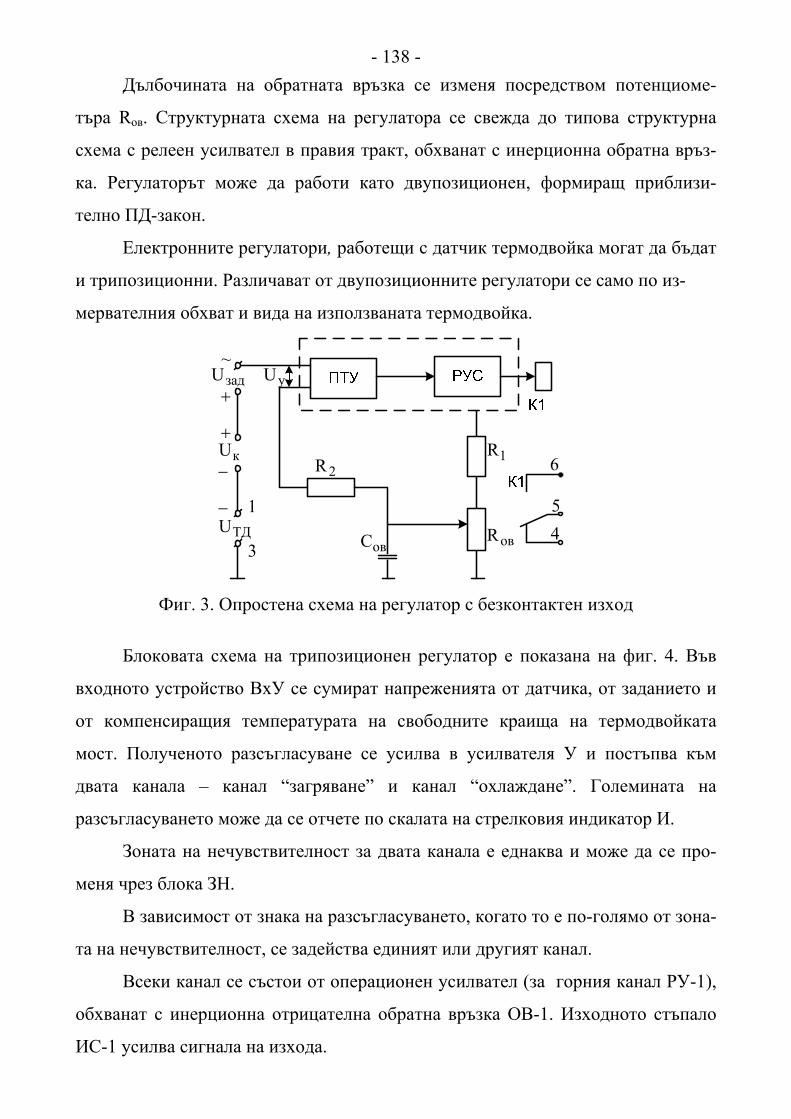
- 138 -Дълбочината на обратната връзка се изменя посредством потенциоме-
търа Rов. Структурната схема на регулатора се свежда до типова структурна
схема с релеен усилвател в правия тракт, обхванат с инерционна обратна връз-
ка. Регулаторът може да работи като двупозиционен, формиращ приблизи-
телно ПД-закон.
Електронните регулатори, работещи с датчик термодвойка могат да бъдат
и трипозиционни. Различават от двупозиционните регулатори се само по из-
мервателния обхват и вида на използваната термодвойка.
задU
ТДU
кU
+
+
−
− 1
3
уU
1R2R
овRовС 4
5
6
~
Фиг. 3. Опростена схема на регулатор с безконтактен изход
Блоковата схема на трипозиционен регулатор е показана на фиг. 4. Във
входното устройство ВхУ се сумират напреженията от датчика, от заданието и
от компенсиращия температурата на свободните краища на термодвойката
мост. Полученото разсъгласуване се усилва в усилвателя У и постъпва към
двата канала – канал “загряване” и канал “охлаждане”. Големината на
разсъгласуването може да се отчете по скалата на стрелковия индикатор И.
Зоната на нечувствителност за двата канала е еднаква и може да се про-
меня чрез блока ЗН.
В зависимост от знака на разсъгласуването, когато то е по-голямо от зона-
та на нечувствителност, се задейства единият или другият канал.
Всеки канал се състои от операционен усилвател (за горния канал РУ-1),
обхванат с инерционна отрицателна обратна връзка ОВ-1. Изходното стъпало
ИС-1 усилва сигнала на изхода.
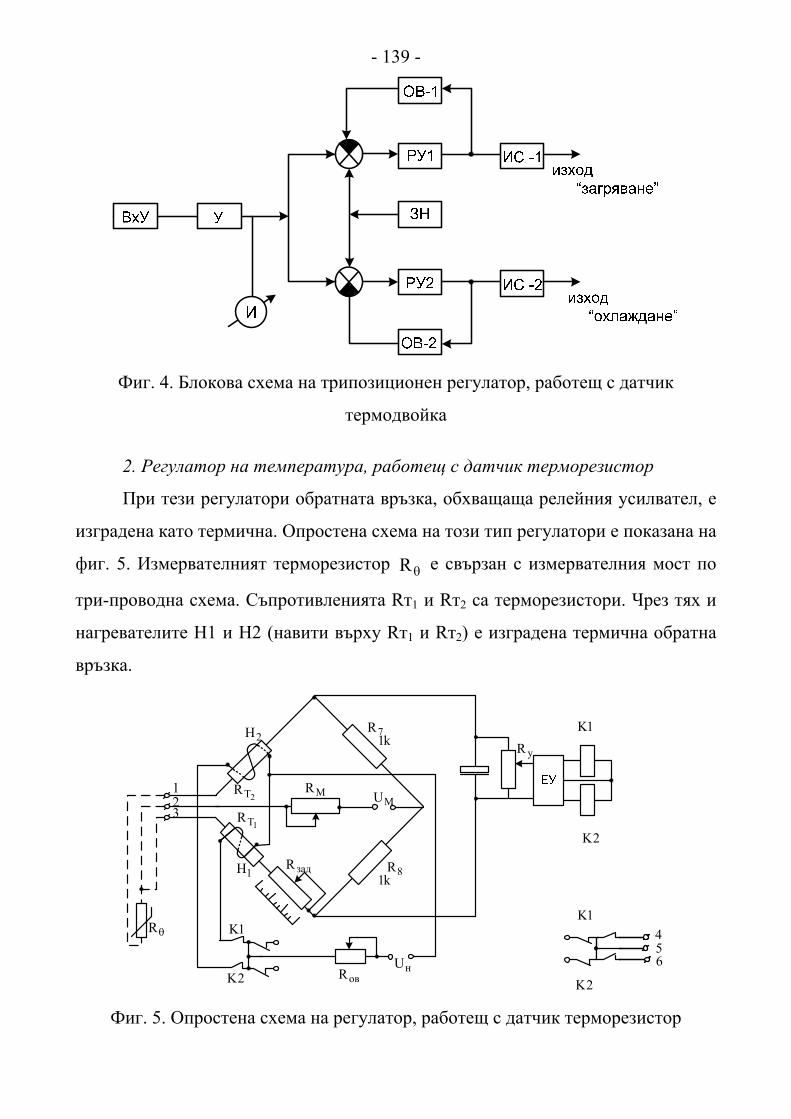
- 139 -
Фиг. 4. Блокова схема на трипозиционен регулатор, работещ с датчик
термодвойка
2. Регулатор на температура, работещ с датчик терморезистор
При тези регулатори обратната връзка, обхващаща релейния усилвател, е
изградена като термична. Опростена схема на този тип регулатори е показана на
фиг. 5. Измервателният терморезистор θR е свързан с измервателния мост по
три-проводна схема. Съпротивленията Rт1 и Rт2 са терморезистори. Чрез тях и
нагревателите Н1 и Н2 (навити върху Rт1 и Rт2) е изградена термична обратна
връзка.
θR
123
2TR
1TR
MR
7Rk1
8Rk11H
2H
1K
1K
2K
2K
MU
нU
yR
овR
задR
1K
2K
456
Фиг. 5. Опростена схема на регулатор, работещ с датчик терморезистор
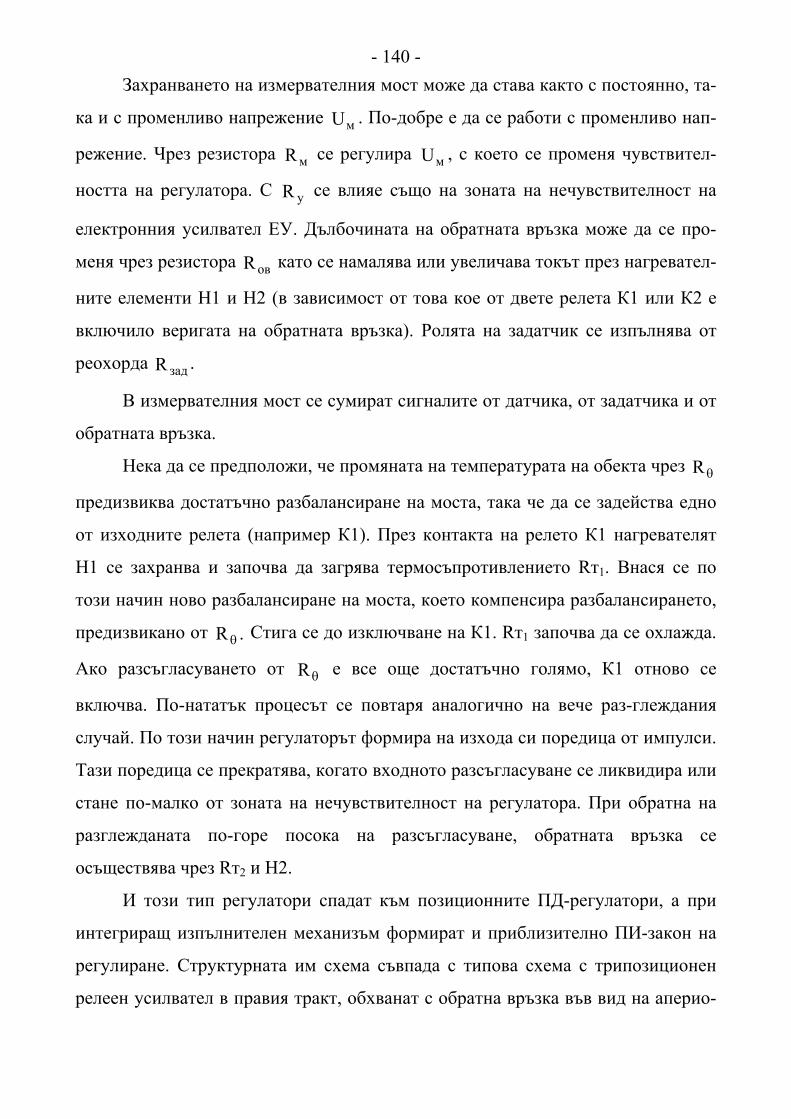
- 140 -Захранването на измервателния мост може да става както с постоянно, та-
ка и с променливо напрежение мU . По-добре е да се работи с променливо нап-
режение. Чрез резистора мR се регулира мU , с което се променя чувствител-
ността на регулатора. С yR се влияе също на зоната на нечувствителност на
електронния усилвател ЕУ. Дълбочината на обратната връзка може да се про-
меня чрез резистора oвR като се намалява или увеличава токът през нагревател-
ните елементи Н1 и Н2 (в зависимост от това кое от двете релета К1 или К2 е
включило веригата на обратната връзка). Ролята на задатчик се изпълнява от
реохорда задR .
В измервателния мост се сумират сигналите от датчика, от задатчика и от
обратната връзка.
Нека да се предположи, че промяната на температурата на обекта чрез θR
предизвиква достатъчно разбалансиране на моста, така че да се задейства едно
от изходните релета (например К1). През контакта на релето К1 нагревателят
Н1 се захранва и започва да загрява термосъпротивлението Rт1. Внася се по
този начин ново разбалансиране на моста, което компенсира разбалансирането,
предизвикано от .R θ Стига се до изключване на К1. Rт1 започва да се охлажда.
Ако разсъгласуването от θR е все още достатъчно голямо, К1 отново се
включва. По-нататък процесът се повтаря аналогично на вече раз-глеждания
случай. По този начин регулаторът формира на изхода си поредица от импулси.
Тази поредица се прекратява, когато входното разсъгласуване се ликвидира или
стане по-малко от зоната на нечувствителност на регулатора. При обратна на
разглежданата по-горе посока на разсъгласуване, обратната връзка се
осъществява чрез Rт2 и Н2.
И този тип регулатори спадат към позиционните ПД-регулатори, а при
интегриращ изпълнителен механизъм формират и приблизително ПИ-закон на
регулиране. Структурната им схема съвпада с типова схема с трипозиционен
релеен усилвател в правия тракт, обхванат с обратна връзка във вид на аперио-
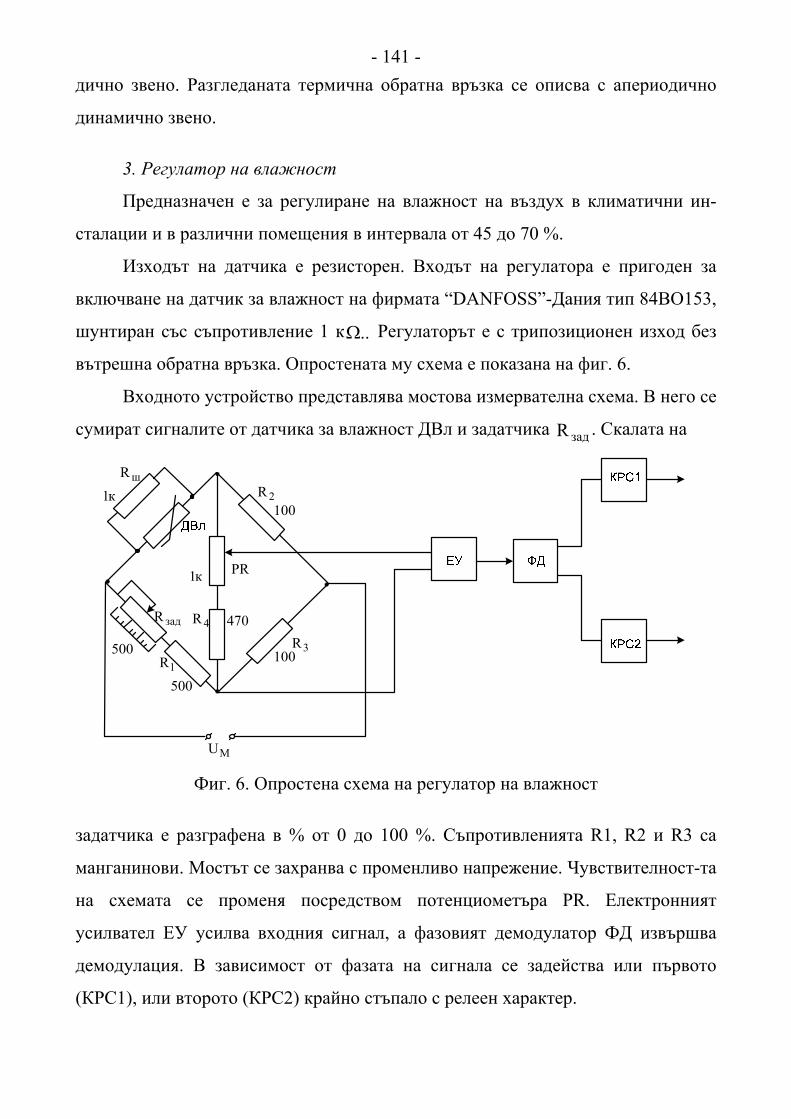
- 141 -дично звено. Разгледаната термична обратна връзка се описва с апериодично
динамично звено.
3. Регулатор на влажност
Предназначен е за регулиране на влажност на въздух в климатични ин-
сталации и в различни помещения в интервала от 45 до 70 %.
Изходът на датчика е резисторен. Входът на регулатора е пригоден за
включване на датчик за влажност на фирмата “DANFOSS”-Дания тип 84ВО153,
шунтиран със съпротивление 1 к ..Ω Регулаторът е с трипозиционен изход без
вътрешна обратна връзка. Опростената му схема е показана на фиг. 6.
Входното устройство представлява мостова измервателна схема. В него се
сумират сигналите от датчика за влажност ДВл и задатчика задR . Скалата на
1R
2R
3R
100
100
500
500
4704RзадR
шRк1
к1 PR
MU Фиг. 6. Опростена схема на регулатор на влажност
задатчика е разграфена в % от 0 до 100 %. Съпротивленията R1, R2 и R3 са
манганинови. Мостът се захранва с променливо напрежение. Чувствителност-та
на схемата се променя посредством потенциометъра PR. Електронният
усилвател ЕУ усилва входния сигнал, а фазовият демодулатор ФД извършва
демодулация. В зависимост от фазата на сигнала се задейства или първото
(КРС1), или второто (КРС2) крайно стъпало с релеен характер.
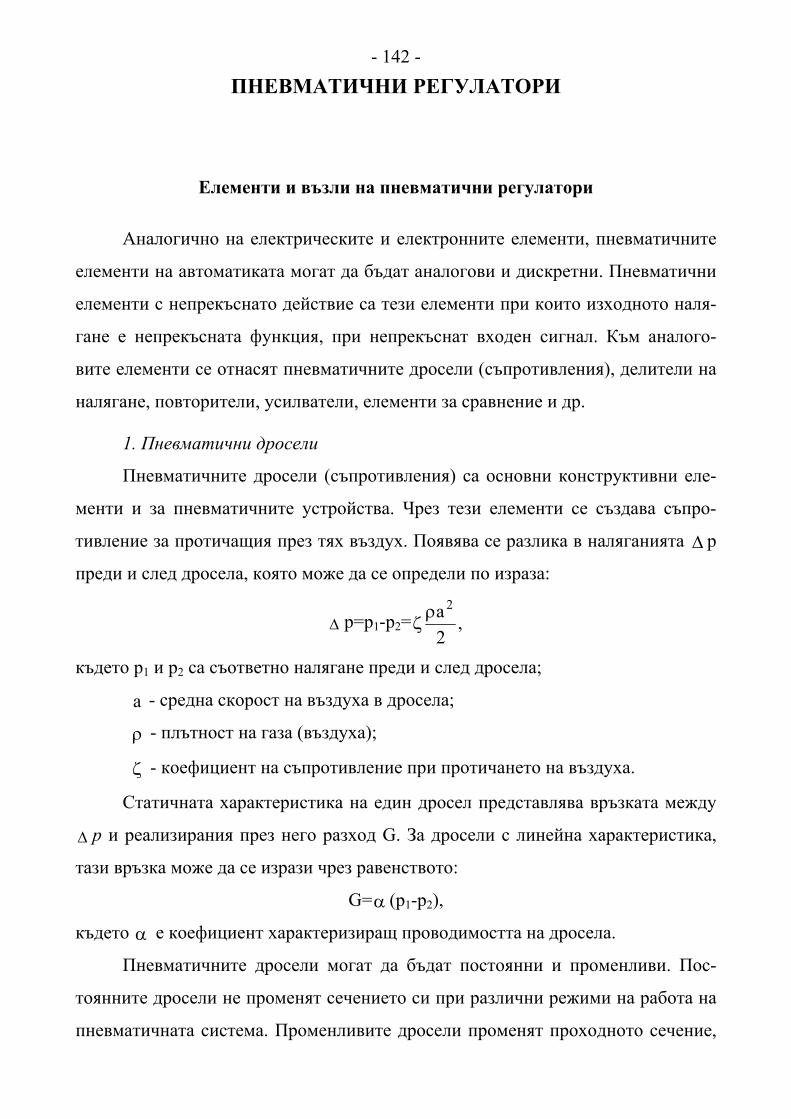
- 142 -
ПНЕВМАТИЧНИ РЕГУЛАТОРИ
Елементи и възли на пневматични регулатори
Аналогично на електрическите и електронните елементи, пневматичните
елементи на автоматиката могат да бъдат аналогови и дискретни. Пневматични
елементи с непрекъснато действие са тези елементи при които изходното наля-
гане е непрекъсната функция, при непрекъснат входен сигнал. Към аналого-
вите елементи се отнасят пневматичните дросели (съпротивления), делители на
налягане, повторители, усилватели, елементи за сравнение и др.
1. Пневматични дросели
Пневматичните дросели (съпротивления) са основни конструктивни еле-
менти и за пневматичните устройства. Чрез тези елементи се създава съпро-
тивление за протичащия през тях въздух. Появява се разлика в наляганията Δ р
преди и след дросела, която може да се определи по израза:
Δ р=р1-р2= ,2а2ρ
ζ
където р1 и р2 са съответно налягане преди и след дросела;
а - средна скорост на въздуха в дросела;
ρ - плътност на газа (въздуха);
ζ - коефициент на съпротивление при протичането на въздуха.
Статичната характеристика на един дросел представлява връзката между
Δ р и реализирания през него разход G. За дросели с линейна характеристика,
тази връзка може да се изрази чрез равенството:
G=α (р1-р2),
където α е коефициент характеризиращ проводимостта на дросела.
Пневматичните дросели могат да бъдат постоянни и променливи. Пос-
тоянните дросели не променят сечението си при различни режими на работа на
пневматичната система. Променливите дросели променят проходното сечение,
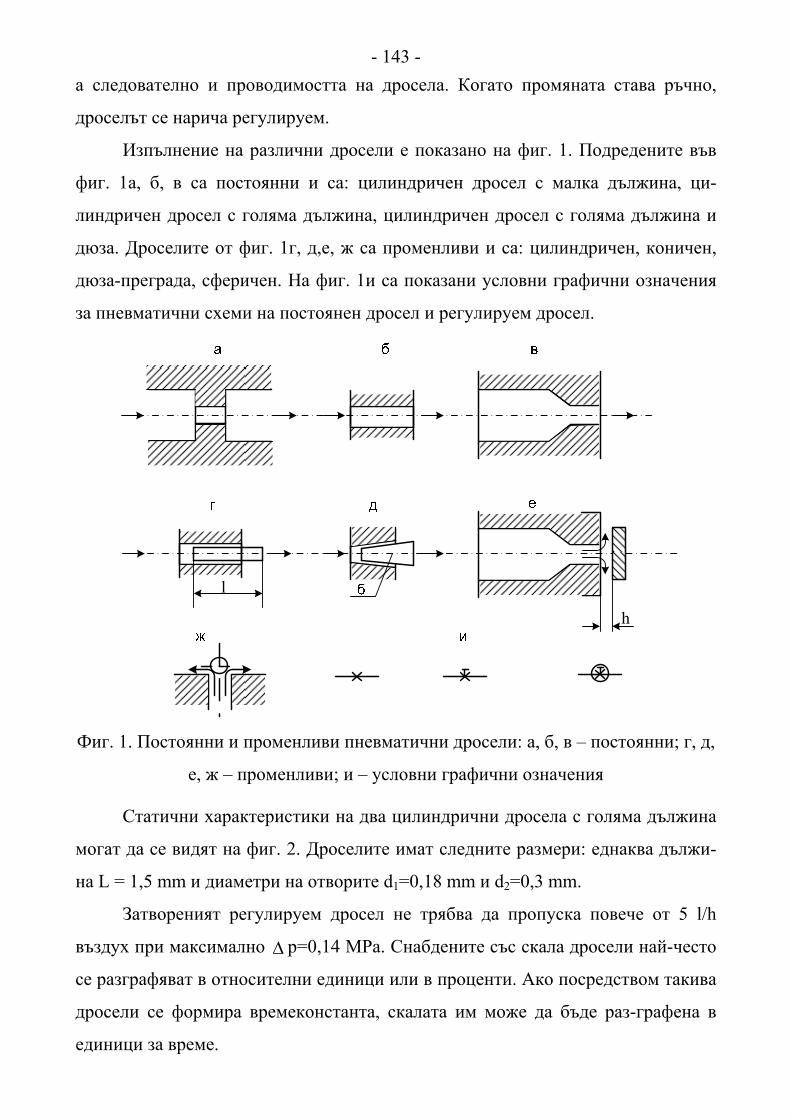
- 143 -а следователно и проводимостта на дросела. Когато промяната става ръчно,
дроселът се нарича регулируем.
Изпълнение на различни дросели е показано на фиг. 1. Подредените във
фиг. 1а, б, в са постоянни и са: цилиндричен дросел с малка дължина, ци-
линдричен дросел с голяма дължина, цилиндричен дросел с голяма дължина и
дюза. Дроселите от фиг. 1г, д,е, ж са променливи и са: цилиндричен, коничен,
дюза-преграда, сферичен. На фиг. 1и са показани условни графични означения
за пневматични схеми на постоянен дросел и регулируем дросел.
h
l
Фиг. 1. Постоянни и променливи пневматични дросели: а, б, в – постоянни; г, д,
е, ж – променливи; и – условни графични означения
Статични характеристики на два цилиндрични дросела с голяма дължина
могат да се видят на фиг. 2. Дроселите имат следните размери: еднаква дължи-
на L = 1,5 mm и диаметри на отворите d1=0,18 mm и d2=0,3 mm.
Затвореният регулируем дросел не трябва да пропуска повече от 5 l/h
въздух при максимално Δ р=0,14 МРа. Снабдените със скала дросели най-често
се разграфяват в относителни единици или в проценти. Ако посредством такива
дросели се формира времеконстанта, скалата им може да бъде раз-графена в
единици за време.
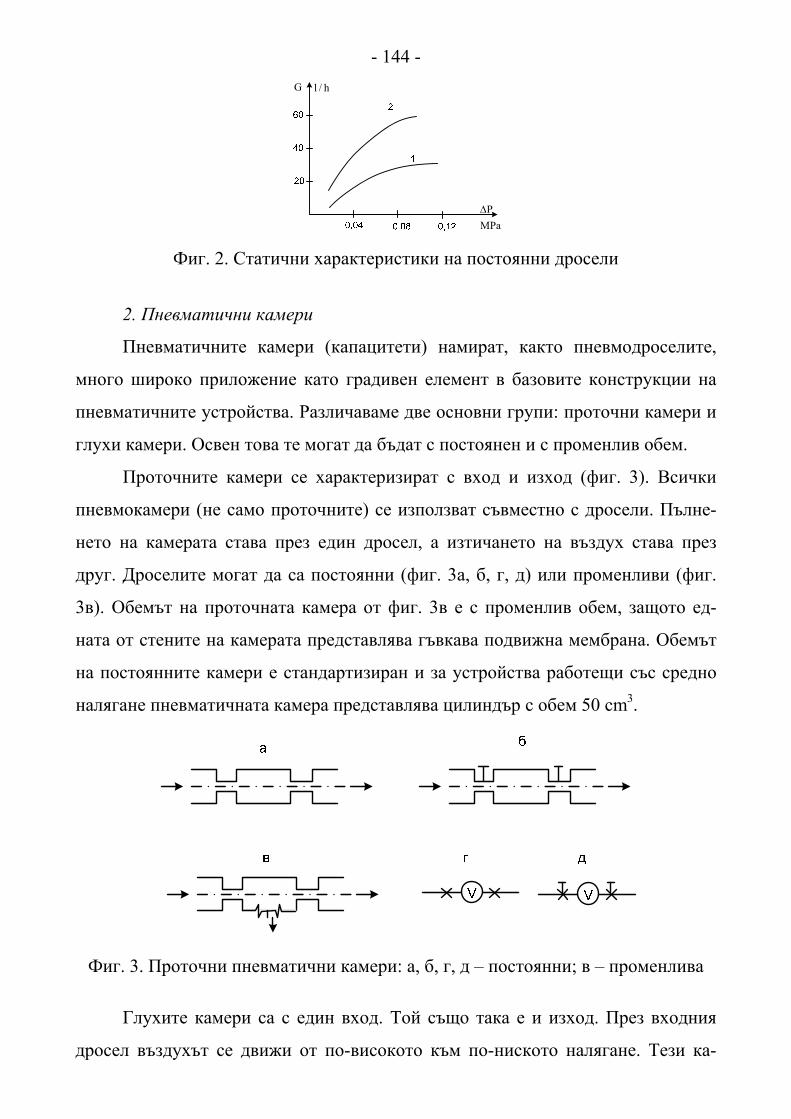
- 144 -G h/l
PΔMPa
Фиг. 2. Статични характеристики на постоянни дросели
2. Пневматични камери
Пневматичните камери (капацитети) намират, както пневмодроселите,
много широко приложение като градивен елемент в базовите конструкции на
пневматичните устройства. Различаваме две основни групи: проточни камери и
глухи камери. Освен това те могат да бъдат с постоянен и с променлив обем.
Проточните камери се характеризират с вход и изход (фиг. 3). Всички
пневмокамери (не само проточните) се използват съвместно с дросели. Пълне-
нето на камерата става през един дросел, а изтичането на въздух става през
друг. Дроселите могат да са постоянни (фиг. 3а, б, г, д) или променливи (фиг.
3в). Обемът на проточната камера от фиг. 3в е с променлив обем, защото ед-
ната от стените на камерата представлява гъвкава подвижна мембрана. Обемът
на постоянните камери е стандартизиран и за устройства работещи със средно
налягане пневматичната камера представлява цилиндър с обем 50 cm3.
Фиг. 3. Проточни пневматични камери: а, б, г, д – постоянни; в – променлива
Глухите камери са с един вход. Той също така е и изход. През входния
дросел въздухът се движи от по-високото към по-ниското налягане. Тези ка-
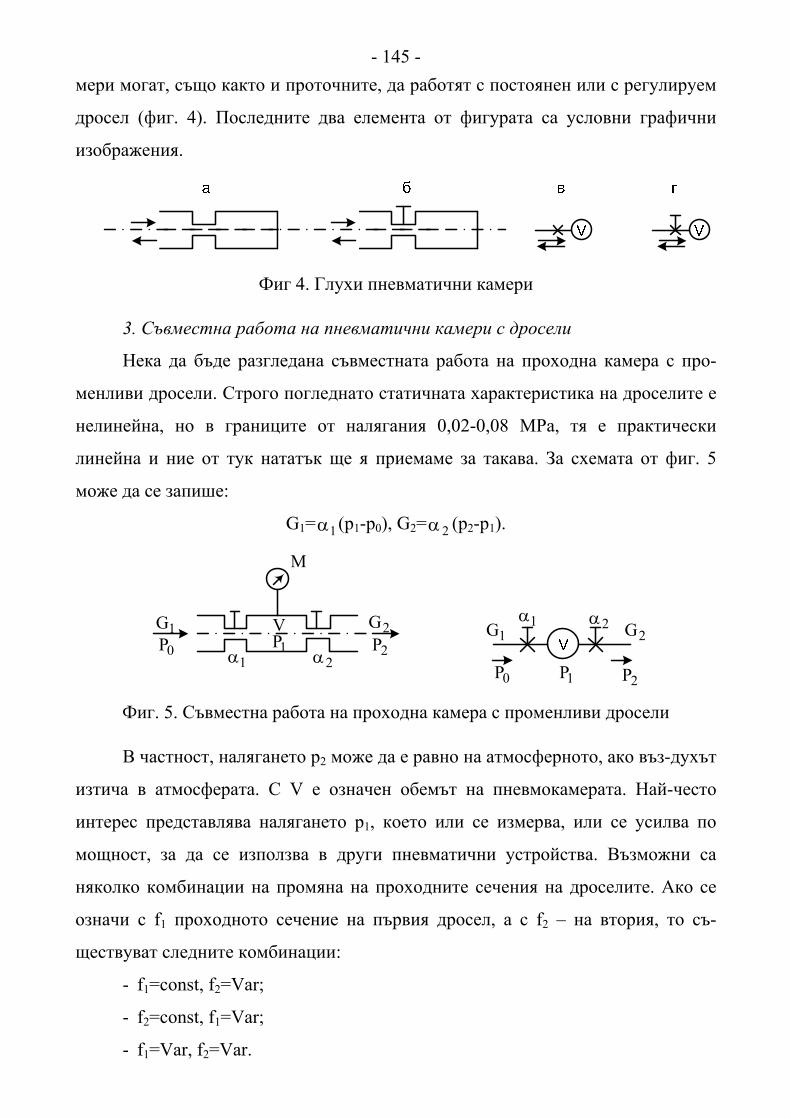
- 145 -мери могат, също както и проточните, да работят с постоянен или с регулируем
дросел (фиг. 4). Последните два елемента от фигурата са условни графични
изображения.
Фиг 4. Глухи пневматични камери
3. Съвместна работа на пневматични камери с дросели
Нека да бъде разгледана съвместната работа на проходна камера с про-
менливи дросели. Строго погледнато статичната характеристика на дроселите е
нелинейна, но в границите от налягания 0,02-0,08 МРа, тя е практически
линейна и ние от тук нататък ще я приемаме за такава. За схемата от фиг. 5
може да се запише:
G1= 1α (р1-р0), G2= 2α (р2-р1).
1G 2G0P 1P 2P
V
1α 2α
M
1α 2α1G 2G
0P 2P1P
Фиг. 5. Съвместна работа на проходна камера с променливи дросели
В частност, налягането р2 може да е равно на атмосферното, ако въз-духът
изтича в атмосферата. С V е означен обемът на пневмокамерата. Най-често
интерес представлява налягането р1, което или се измерва, или се усилва по
мощност, за да се използва в други пневматични устройства. Възможни са
няколко комбинации на промяна на проходните сечения на дроселите. Ако се
означи с f1 проходното сечение на първия дросел, а с f2 – на втория, то съ-
ществуват следните комбинации:
- f1=const, f2=Var;
- f2=const, f1=Var;
- f1=Var, f2=Var.
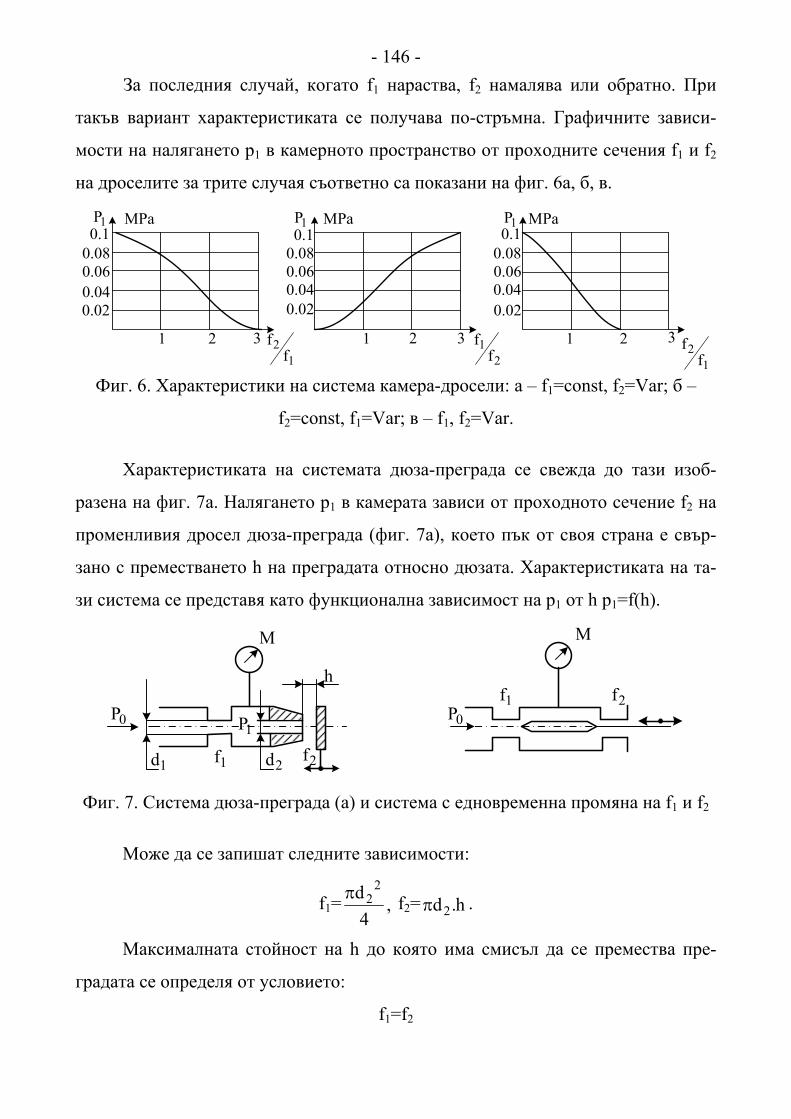
- 146 - За последния случай, когато f1 нараства, f2 намалява или обратно. При
такъв вариант характеристиката се получава по-стръмна. Графичните зависи-
мости на налягането р1 в камерното пространство от проходните сечения f1 и f2
на дроселите за трите случая съответно са показани на фиг. 6а, б, в.
12
ff
1P MPa
211
2f
f
1P MPa
12
1f
f
1P MPa
1 2 23 33
1.0
02.0 02.0 02.004.004.004.0
06.0 06.0 06.008.0 08.0 08.01.0 1.0
Фиг. 6. Характеристики на система камера-дросели: а – f1=const, f2=Var; б –
f2=const, f1=Var; в – f1, f2=Var.
Характеристиката на системата дюза-преграда се свежда до тази изоб-
разена на фиг. 7а. Налягането р1 в камерата зависи от проходното сечение f2 на
променливия дросел дюза-преграда (фиг. 7а), което пък от своя страна е свър-
зано с преместването h на преградата относно дюзата. Характеристиката на та-
зи система се представя като функционална зависимост на р1 от h р1=f(h).
0P1P
1d 2d1f 2f
h
M
0P
M
1f 2f
Фиг. 7. Система дюза-преграда (а) и система с едновременна промяна на f1 и f2
Може да се запишат следните зависимости:
f1= ,4
d 22π f2= h.d2π .
Максималната стойност на h до която има смисъл да се премества пре-
градата се определя от условието:
f1=f2
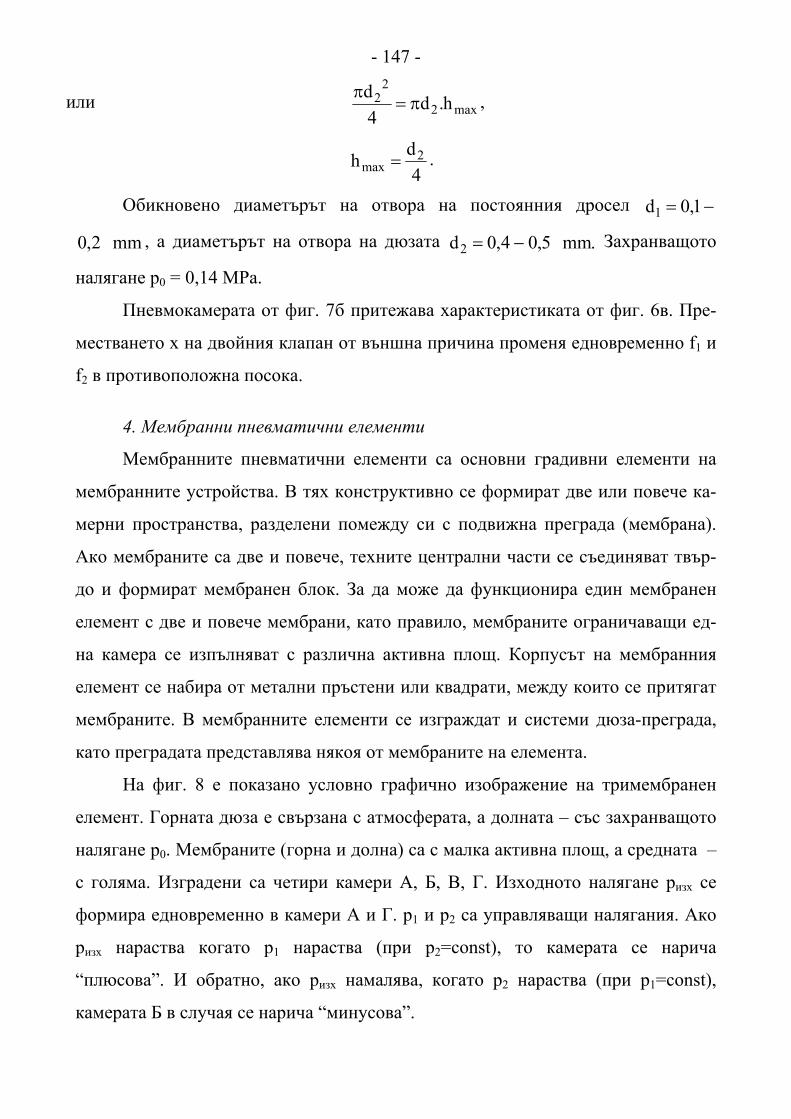
- 147 -
или max2
22 h.d
4d
π=π ,
4dh 2
max = .
Обикновено диаметърът на отвора на постоянния дросел −= 1,0d1
mm2,0 , а диаметърът на отвора на дюзата .mm5,04,0d2 −= Захранващото
налягане р0 = 0,14 МРа.
Пневмокамерата от фиг. 7б притежава характеристиката от фиг. 6в. Пре-
местването х на двойния клапан от външна причина променя едновременно f1 и
f2 в противоположна посока.
4. Мембранни пневматични елементи
Мембранните пневматични елементи са основни градивни елементи на
мембранните устройства. В тях конструктивно се формират две или повече ка-
мерни пространства, разделени помежду си с подвижна преграда (мембрана).
Ако мембраните са две и повече, техните централни части се съединяват твър-
до и формират мембранен блок. За да може да функционира един мембранен
елемент с две и повече мембрани, като правило, мембраните ограничаващи ед-
на камера се изпълняват с различна активна площ. Корпусът на мембранния
елемент се набира от метални пръстени или квадрати, между които се притягат
мембраните. В мембранните елементи се изграждат и системи дюза-преграда,
като преградата представлява някоя от мембраните на елемента.
На фиг. 8 е показано условно графично изображение на тримембранен
елемент. Горната дюза е свързана с атмосферата, а долната – със захранващото
налягане р0. Мембраните (горна и долна) са с малка активна площ, а средната –
с голяма. Изградени са четири камери А, Б, В, Г. Изходното налягане ризх се
формира едновременно в камери А и Г. р1 и р2 са управляващи налягания. Ако
ризх нараства когато р1 нараства (при р2=const), то камерата се нарича
“плюсова”. И обратно, ако ризх намалява, когато р2 нараства (при р1=const),
камерата Б в случая се нарича “минусова”.
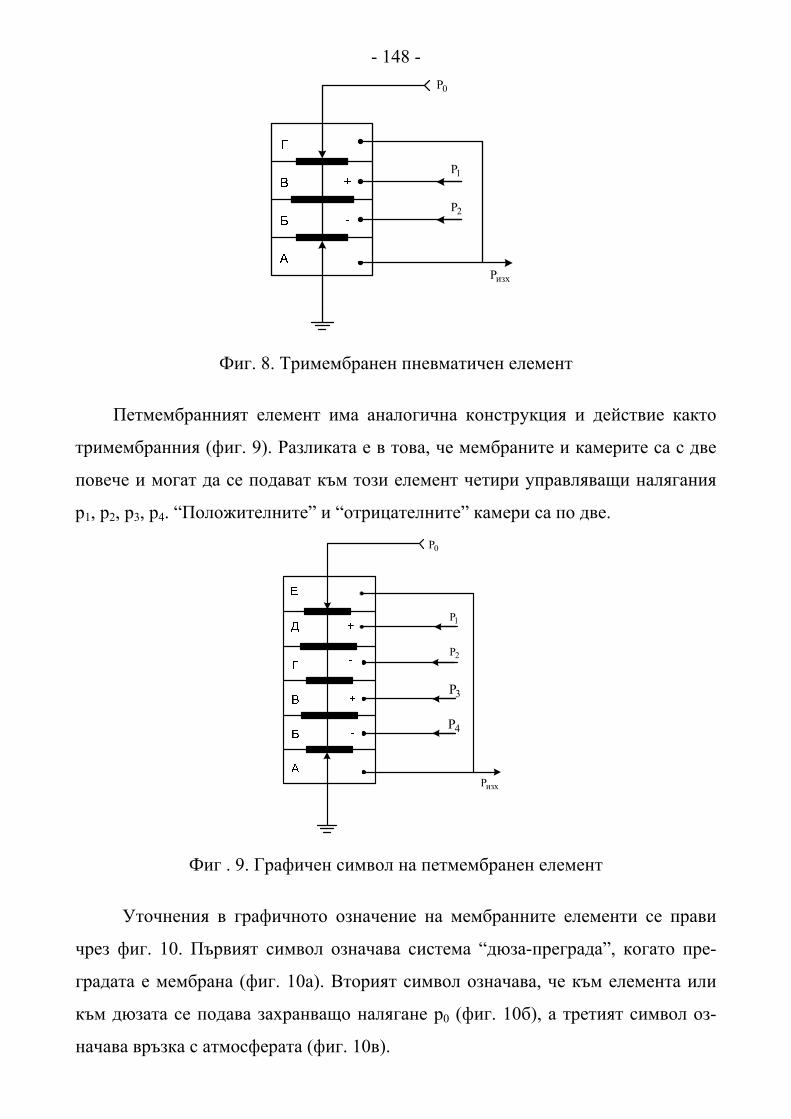
- 148 -0P
1P
2P
изхP
Фиг. 8. Тримембранен пневматичен елемент
Петмембранният елемент има аналогична конструкция и действие както
тримембранния (фиг. 9). Разликата е в това, че мембраните и камерите са с две
повече и могат да се подават към този елемент четири управляващи налягания
р1, р2, р3, р4. “Положителните” и “отрицателните” камери са по две.
0P
3P
2P
изхP
1P
4P
Фиг . 9. Графичен символ на петмембранен елемент
Уточнения в графичното означение на мембранните елементи се прави
чрез фиг. 10. Първият символ означава система “дюза-преграда”, когато пре-
градата е мембрана (фиг. 10а). Вторият символ означава, че към елемента или
към дюзата се подава захранващо налягане р0 (фиг. 10б), а третият символ оз-
начава връзка с атмосферата (фиг. 10в).

- 149 -
Фиг. 10. Фрагменти от условни графични означения на пневматични мембранни
елементи
Нека бъдат разгледани някои мембранни пневматични елементи с непре-
къснато действие.
вхР изхР
1
2
3
0Р
Фиг. 11. Принципна схема на мембранен повторител
На фиг. 11 е показана принципна схема на мембранен повторител, който
възпроизвежда на изхода си пневматичен сигнал равен на големината на вход-
ния. Елементът се състои от две камери А и Б, отделени една от друга с гъвкава
мембрана 1. Тази мембрана едновременно служи за преграда на дюзата 2 и
образува с нея системата дюза-преграда. Камера А може да се свързва с
атмосферата посредством дюза 2. На линията за захранващо налягане р0 за
повторителя е свързан постоянният дросел 3 (с диаметър на отвора 0,3 mm).
Конструктивно дроселът не е съставна част на повторителя. При промяна на рвх,
мембраната 1 се премества относно дюзата 2, вследствие на което се променя и
ризх. В равновесно състояние
рвх.s = ризх.s
или
рвх = ризх ,
където s е активната площ на мембраната.
Мембранен повторител с изместване е показан на фиг. 12. Той възпроиз-
вежда на изхода си сигнал различаващ се от входния с постоянна стойност (до
0,015 МРа). Съдържа допълнително, в сравнение с обикновения повторител, две
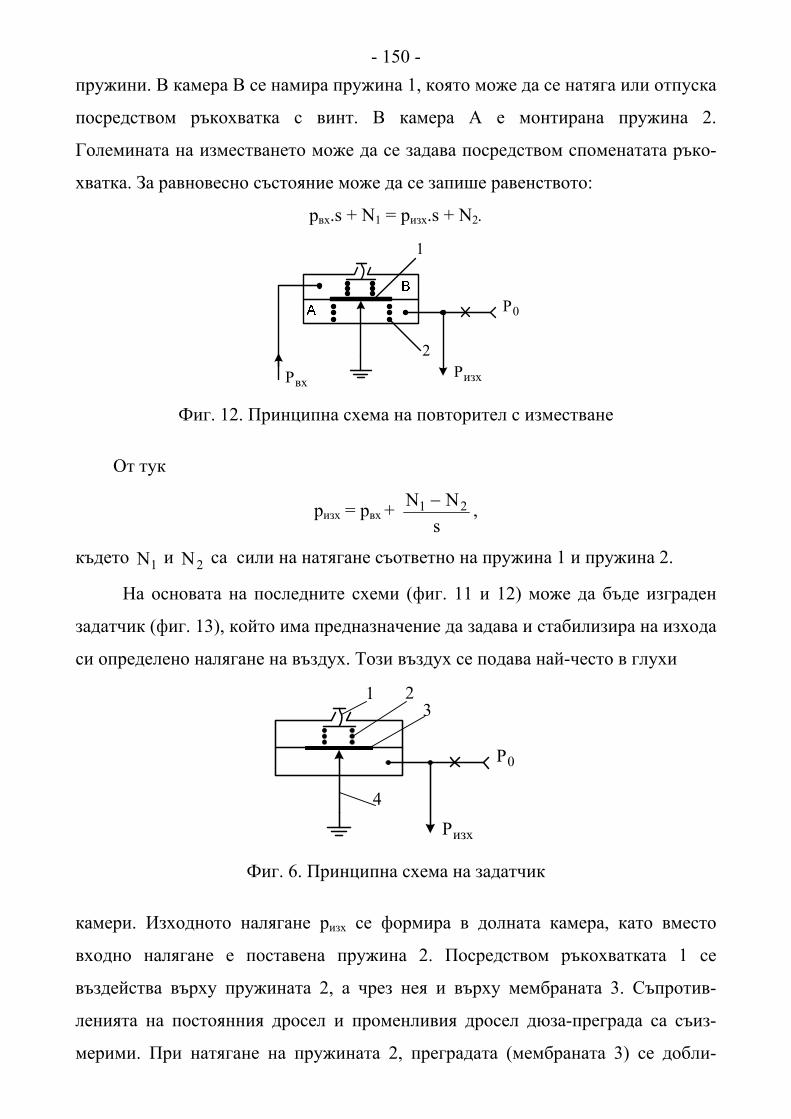
- 150 -пружини. В камера В се намира пружина 1, която може да се натяга или отпуска
посредством ръкохватка с винт. В камера А е монтирана пружина 2.
Големината на изместването може да се задава посредством споменатата ръко-
хватка. За равновесно състояние може да се запише равенството:
pвх.s + N1 = pизх.s + N2.
вхР изхР
1
2
0Р
Фиг. 12. Принципна схема на повторител с изместване
От тук
ризх = рвх + s
NN 21 − ,
където 1N и 2N са сили на натягане съответно на пружина 1 и пружина 2.
На основата на последните схеми (фиг. 11 и 12) може да бъде изграден
задатчик (фиг. 13), който има предназначение да задава и стабилизира на изхода
си определено налягане на въздух. Този въздух се подава най-често в глухи
изхР
1 2
0Р
3
4
Фиг. 6. Принципна схема на задатчик
камери. Изходното налягане ризх се формира в долната камера, като вместо
входно налягане е поставена пружина 2. Посредством ръкохватката 1 се
въздейства върху пружината 2, а чрез нея и върху мембраната 3. Съпротив-
ленията на постоянния дросел и променливия дросел дюза-преграда са съиз-
мерими. При натягане на пружината 2, преградата (мембраната 3) се добли-
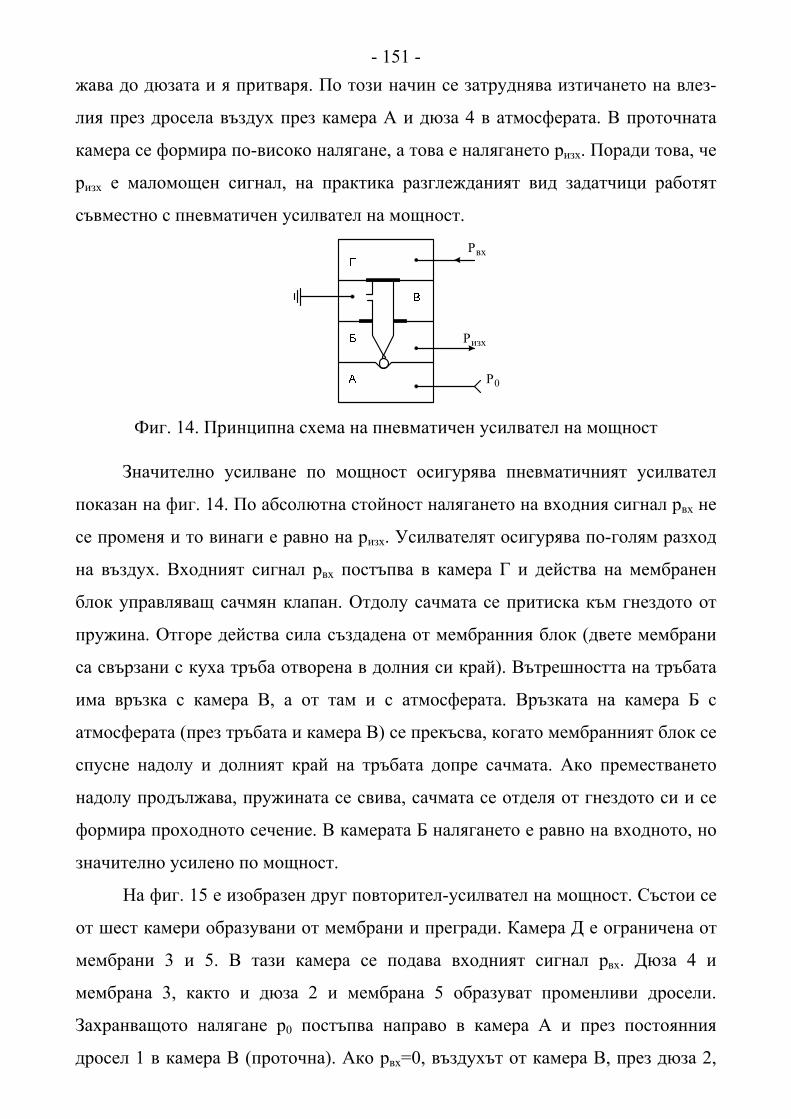
- 151 -жава до дюзата и я притваря. По този начин се затруднява изтичането на влез-
лия през дросела въздух през камера А и дюза 4 в атмосферата. В проточната
камера се формира по-високо налягане, а това е налягането ризх. Поради това, че
ризх е маломощен сигнал, на практика разглежданият вид задатчици работят
съвместно с пневматичен усилвател на мощност.
вхР
изхР
0Р
Фиг. 14. Принципна схема на пневматичен усилвател на мощност
Значително усилване по мощност осигурява пневматичният усилвател
показан на фиг. 14. По абсолютна стойност налягането на входния сигнал рвх не
се променя и то винаги е равно на ризх. Усилвателят осигурява по-голям разход
на въздух. Входният сигнал рвх постъпва в камера Г и действа на мембранен
блок управляващ сачмян клапан. Отдолу сачмата се притиска към гнездото от
пружина. Отгоре действа сила създадена от мембранния блок (двете мембрани
са свързани с куха тръба отворена в долния си край). Вътрешността на тръбата
има връзка с камера В, а от там и с атмосферата. Връзката на камера Б с
атмосферата (през тръбата и камера В) се прекъсва, когато мембранният блок се
спусне надолу и долният край на тръбата допре сачмата. Ако преместването
надолу продължава, пружината се свива, сачмата се отделя от гнездото си и се
формира проходното сечение. В камерата Б налягането е равно на входното, но
значително усилено по мощност.
На фиг. 15 е изобразен друг повторител-усилвател на мощност. Състои се
от шест камери образувани от мембрани и прегради. Камера Д е ограничена от
мембрани 3 и 5. В тази камера се подава входният сигнал рвх. Дюза 4 и
мембрана 3, както и дюза 2 и мембрана 5 образуват променливи дросели.
Захранващото налягане р0 постъпва направо в камера А и през постоянния
дросел 1 в камера В (проточна). Ако рвх=0, въздухът от камера В, през дюза 2,
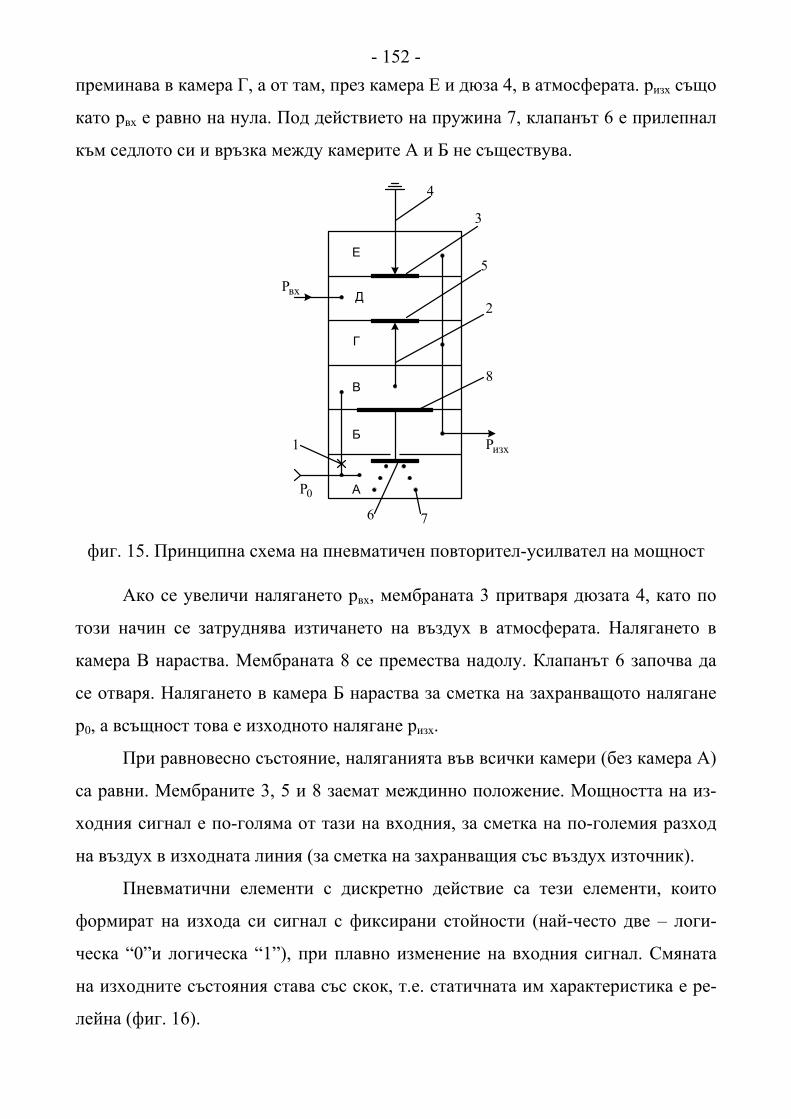
- 152 -преминава в камера Г, а от там, през камера Е и дюза 4, в атмосферата. ризх също
като рвх е равно на нула. Под действието на пружина 7, клапанът 6 е прилепнал
към седлото си и връзка между камерите А и Б не съществува.
0P
изхP
вхP
А
Б
В
Г
Д
Е
4
6 7
3
5
2
8
1
фиг. 15. Принципна схема на пневматичен повторител-усилвател на мощност
Ако се увеличи налягането рвх, мембраната 3 притваря дюзата 4, като по
този начин се затруднява изтичането на въздух в атмосферата. Налягането в
камера В нараства. Мембраната 8 се премества надолу. Клапанът 6 започва да
се отваря. Налягането в камера Б нараства за сметка на захранващото налягане
р0, а всъщност това е изходното налягане ризх.
При равновесно състояние, наляганията във всички камери (без камера А)
са равни. Мембраните 3, 5 и 8 заемат междинно положение. Мощността на из-
ходния сигнал е по-голяма от тази на входния, за сметка на по-големия разход
на въздух в изходната линия (за сметка на захранващия със въздух източник).
Пневматични елементи с дискретно действие са тези елементи, които
формират на изхода си сигнал с фиксирани стойности (най-често две – логи-
ческа “0”и логическа “1”), при плавно изменение на входния сигнал. Смяната
на изходните състояния става със скок, т.е. статичната им характеристика е ре-
лейна (фиг. 16).
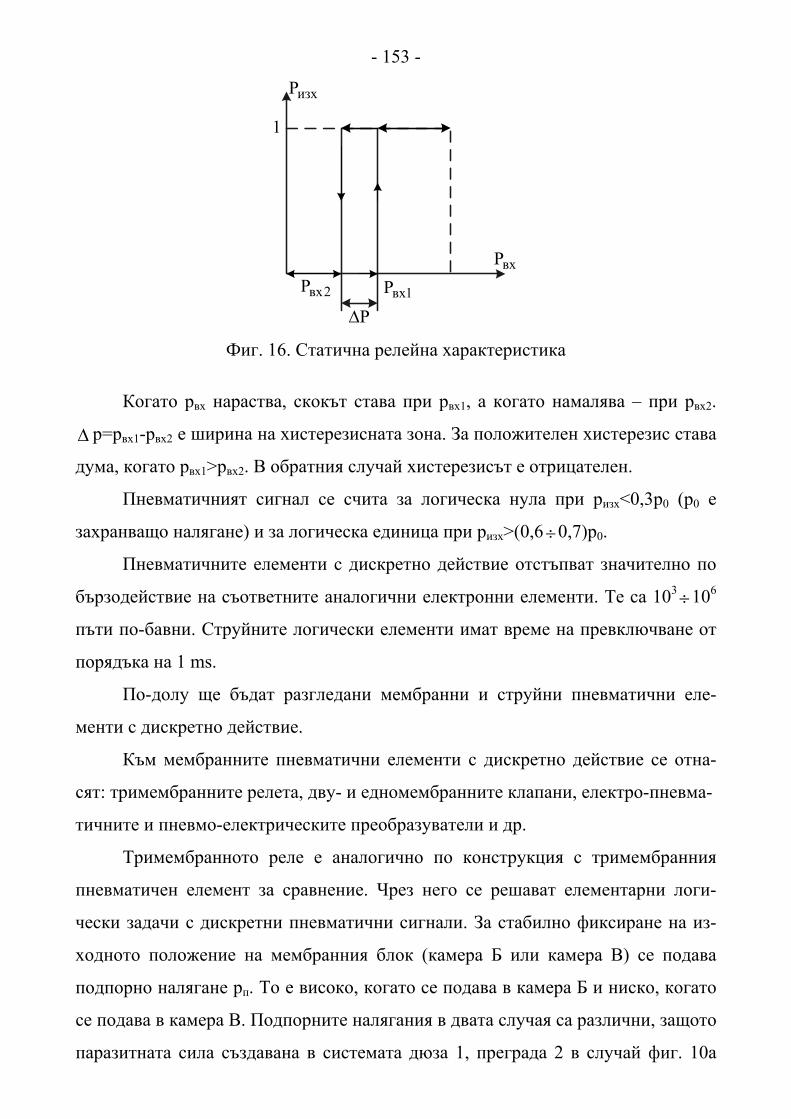
- 153 -
изхP
вхP
2вхP 1вхP
1
PΔ Фиг. 16. Статична релейна характеристика
Когато рвх нараства, скокът става при рвх1, а когато намалява – при рвх2.
Δ р=рвх1-рвх2 е ширина на хистерезисната зона. За положителен хистерезис става
дума, когато рвх1>рвх2. В обратния случай хистерезисът е отрицателен.
Пневматичният сигнал се счита за логическа нула при ризх<0,3р0 (р0 е
захранващо налягане) и за логическа единица при ризх>(0,6÷0,7)р0.
Пневматичните елементи с дискретно действие отстъпват значително по
бързодействие на съответните аналогични електронни елементи. Те са 103÷106
пъти по-бавни. Струйните логически елементи имат време на превключване от
порядъка на 1 ms.
По-долу ще бъдат разгледани мембранни и струйни пневматични еле-
менти с дискретно действие.
Към мембранните пневматични елементи с дискретно действие се отна-
сят: тримембранните релета, дву- и едномембранните клапани, електро-пневма-
тичните и пневмо-електрическите преобразуватели и др.
Тримембранното реле е аналогично по конструкция с тримембранния
пневматичен елемент за сравнение. Чрез него се решават елементарни логи-
чески задачи с дискретни пневматични сигнали. За стабилно фиксиране на из-
ходното положение на мембранния блок (камера Б или камера В) се подава
подпорно налягане рп. То е високо, когато се подава в камера Б и ниско, когато
се подава в камера В. Подпорните налягания в двата случая са различни, защото
паразитната сила създавана в системата дюза 1, преграда 2 в случай фиг. 10а
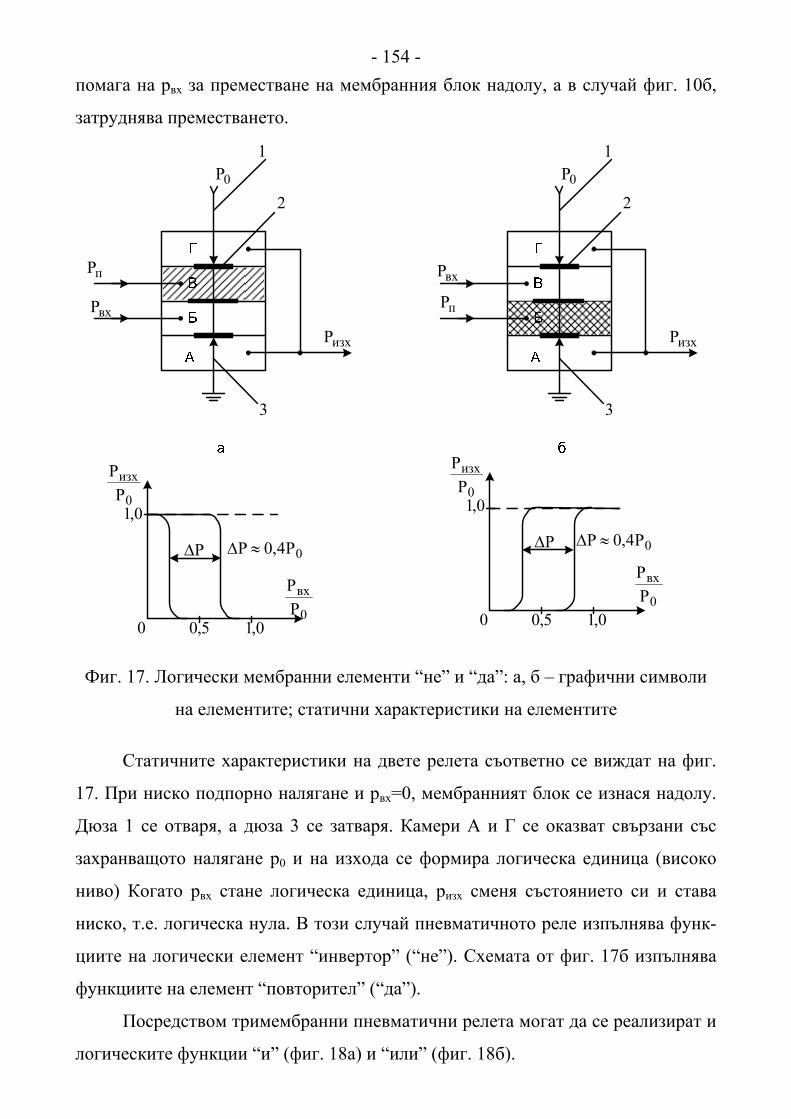
- 154 -помага на рвх за преместване на мембранния блок надолу, а в случай фиг. 10б,
затруднява преместването.
пP
вхP
изхP
0P1
2
3
0
изхРР
РΔ 0Р4,0Р ≈Δ
0
вхРР
0 5,0 0,1
0,10
изхРР
РΔ 0Р4,0Р ≈Δ
0
вхРР
0 5,0 0,1
0,1
вхP
изхP
0P1
2
3
пP
Фиг. 17. Логически мембранни елементи “не” и “да”: а, б – графични символи
на елементите; статични характеристики на елементите
Статичните характеристики на двете релета съответно се виждат на фиг.
17. При ниско подпорно налягане и рвх=0, мембранният блок се изнася надолу.
Дюза 1 се отваря, а дюза 3 се затваря. Камери А и Г се оказват свързани със
захранващото налягане р0 и на изхода се формира логическа единица (високо
ниво) Когато рвх стане логическа единица, ризх сменя състоянието си и става
ниско, т.е. логическа нула. В този случай пневматичното реле изпълнява функ-
циите на логически елемент “инвертор” (“не”). Схемата от фиг. 17б изпълнява
функциите на елемент “повторител” (“да”).
Посредством тримембранни пневматични релета могат да се реализират и
логическите функции “и” (фиг. 18а) и “или” (фиг. 18б).
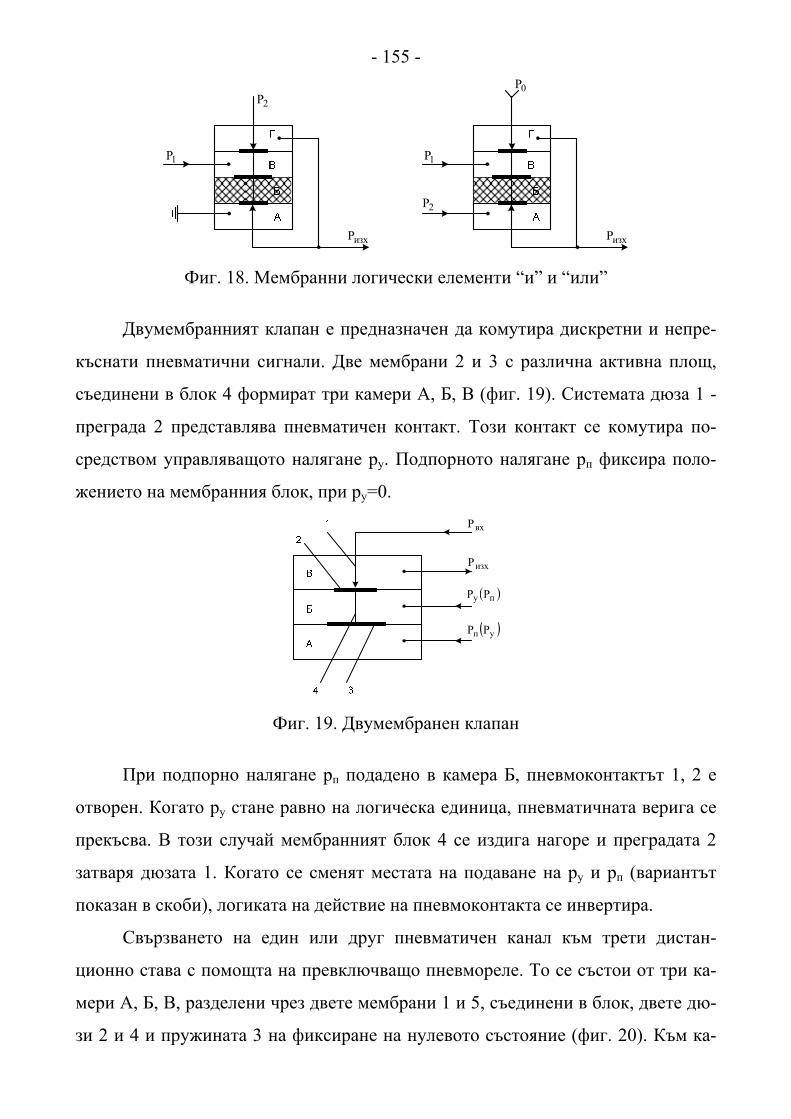
- 155 -
изхP
2P
1P
изхP
2P
1P
0P
Фиг. 18. Мембранни логически елементи “и” и “или”
Двумембранният клапан е предназначен да комутира дискретни и непре-
къснати пневматични сигнали. Две мембрани 2 и 3 с различна активна площ,
съединени в блок 4 формират три камери А, Б, В (фиг. 19). Системата дюза 1 -
преграда 2 представлява пневматичен контакт. Този контакт се комутира по-
средством управляващото налягане ру. Подпорното налягане рп фиксира поло-
жението на мембранния блок, при ру=0.
вхР
изхР
( )пу PP
( )уп PP
Фиг. 19. Двумембранен клапан
При подпорно налягане рп подадено в камера Б, пневмоконтактът 1, 2 е
отворен. Когато ру стане равно на логическа единица, пневматичната верига се
прекъсва. В този случай мембранният блок 4 се издига нагоре и преградата 2
затваря дюзата 1. Когато се сменят местата на подаване на ру и рп (вариантът
показан в скоби), логиката на действие на пневмоконтакта се инвертира.
Свързването на един или друг пневматичен канал към трети дистан-
ционно става с помощта на превключващо пневмореле. То се състои от три ка-
мери А, Б, В, разделени чрез двете мембрани 1 и 5, съединени в блок, двете дю-
зи 2 и 4 и пружината 3 на фиксиране на нулевото състояние (фиг. 20). Към ка-
- 156 -мера А се подава управляващият сигнал ру, а камера В е свързана с атмосфе-
рата. Към изхода, през камера Б се подава или входният сигнал рвх1, или вход-
ният сигнал рвх2. Когато ру=0, ризх=рвх2, при ру=1, ризх=рвх1. В последния вариант
управляващият сигнал, чрез мембраната 5 и мембранния блок противодейства
на пружината 3. Вследствие на това дюза 4 се затваря, а се отваря дюза 2.
уP
2P
изхP1P
Фиг. 20. Превключващо реле
Пневматичните бутони и ключове са предназначени за ръчна комутация
на пневматични вериги (фиг. 21). Налягането р0 или рвх се предава към изхода,
когато клапанът 2 е натиснат от кухия лост 3. При това условие камера А се
оказва свързана с камера Б. В същото време връзката на камера Б с атмосфе-
рата (чрез камера Г и отвора на кухия лост 3) се прекъсва. При отпуснат бутон 4
(фиг. 21а) или поставен в нулево положение ключ 5 (фиг. 21б), клапанът 2 се
освобождава от кухия лост 3 и под действието на пружина 1 ляга върху отвора
на клапанното седло. Камера Б e свързана с атмосферата и ризх става нула.
изхР
0P 0P
изхР
Фиг. 21. Схеми на пневматичен бутон (а) и пневматичен ключ (б)
На фиг. 22 са изобразени схемите на пневмоелектрически и електропнев-
матичен дискретни преобразуватели.
- 157 -
вхP1P
2P
изхP
фиг. 22. Схеми на пневмоелектрически (а) и електропневматичен (б)
преобразуватели
В първия преобразувател (фиг. 22а) с помощта на пневматичен управля-
ващ сигнал ру се превключва електрическият контакт 3. При ру=0, под дейст-
вието на пружината 1 се затваря долната електрическа верига. Когато се пода-де
ру=1, чрез мембраната 2 контактът 3 се премества нагоре и осъществява горната
електрическа верига. В схемата от фиг. 22б с електрически управляващ сигнал
Iу (Uу) се комутират две пневматични вериги и към изхода се подава или рвх1
или рвх2. При Iу=0, пружината 5 изтласква преградата 3 нагоре и затваря дюзата
1, т.е. ризх=рвх2. Когато Iу=1 и електромагнитът избута котвата 4 надолу, дюзата
2 се затваря, а се отваря дюза 1. Към изхода се подава рвх1, т.е. ризх=рвх1.
Логически функции могат да бъдат реализирани и с други конструкции
пневматични дискретни елементи, На фиг. 23 са показани три схеми “или” съ-
ответно на пневматичен елемент с летяща мембрана (фиг. 23а), на бутален
елемент (фиг. 23б) и на елемент с метално топче (фиг. 23в).
1вхP
1вхP 2вхP
изхP2вхP
изхP 1вхP 2вхPизхP
0Р
Фиг. 23. Логически елементи: а – с летяща мембрана; б – бутален; в – с метално
топче
Пневматични позиционни регулатори ПР 1.5 и ПР 1.6
1. Позиционен регулатор ПР 1.5
- 158 -Пневматичният регулатор ПР 1.5 е двупозиционен. Той може да бъде
включен да работи “на максимум” или “на минимум”. Принципната схема на
регулатора е показана на фиг. 1. При настройка на максимум, изходното наля-
гане съответства на логическа 1, когато текущата стойност на налягането рд
(налягането, постъпващо от датчика) превиши зададеното налягане рзд (форми-
рано чрез задатчика 1 и постоянния дросел 2). При настройка на минимум е
точно обратното (фиг. 2).
0Р
изхР
0Р
0Р
дР
Фиг. 1. Принципна схема на регулатор ПР1.5
0Ризх =
0Ризх =1Ризх =
1Ризх =
дР
дРзадР
Фиг. 2. Схема за настройка на “min” и “max”
Превключването на схемата на регулатора става чрез размяна на вход-
ните камери Б и В на тримембранния суматор 4 (елемент за сравнение). За
удобство се използва специален превключвател 6. Формираното след суматора
4 изходно налягане ризх се усилва по мощност в пневмоусилвателя 5. Големи-
ната на зададеното налягане рзд се отчита по скалата на манометъра 3.
При настройка на минимум превключвателят 6 се поставя така, че наля-
гането рд да постъпва в камера Б, а рзд – в камера В. Горният пневмоконтакт на
елемента 4 е отворен когато рд<рзд и ризх=1. Щом рд стане по-голямо от рзд, се
отваря долният пневмоконтакт и изходното налягане се изравнява с атмосфер-
ното, т.е. ризх=0.
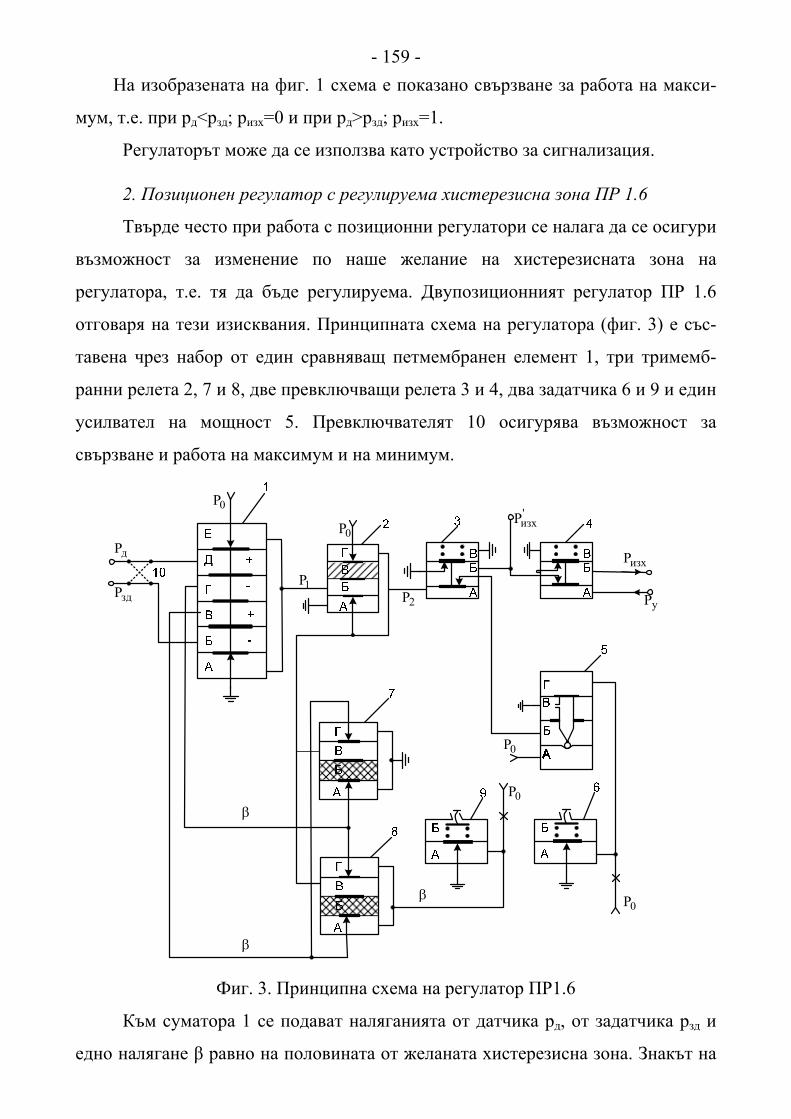
- 159 -На изобразената на фиг. 1 схема е показано свързване за работа на макси-
мум, т.е. при рд<рзд; ризх=0 и при рд>рзд; ризх=1.
Регулаторът може да се използва като устройство за сигнализация.
2. Позиционен регулатор с регулируема хистерезисна зона ПР 1.6
Твърде често при работа с позиционни регулатори се налага да се осигури
възможност за изменение по наше желание на хистерезисната зона на
регулатора, т.е. тя да бъде регулируема. Двупозиционният регулатор ПР 1.6
отговаря на тези изисквания. Принципната схема на регулатора (фиг. 3) е със-
тавена чрез набор от един сравняващ петмембранен елемент 1, три тримемб-
ранни релета 2, 7 и 8, две превключващи релета 3 и 4, два задатчика 6 и 9 и един
усилвател на мощност 5. Превключвателят 10 осигурява възможност за
свързване и работа на максимум и на минимум.
0P
1P2P
'изхP
уP
изхP
0P
0P
0Pβ
β
β
0P
дP
здP
Фиг. 3. Принципна схема на регулатор ПР1.6
Към суматора 1 се подават наляганията от датчика рд, от задатчика рзд и
едно налягане β равно на половината от желаната хистерезисна зона. Знакът на

- 160 -β се променя в зависимост от това дали в камера Г или камера В на елемента 1
постъпва това налягане.
Изходният сигнал на регулатора се променя тогава, когато регулираната
величина излиза от хистерезисната зона (фиг. 4), т.е. рд< или >(рзд β± ).
β
β2
изхP
здPдP
Фиг. 4. Статична характеристика на регулатор ПР1.6
Съобразявайки се с посоката на излизане, може да се конкретизира гор-
ното неравенство:
при ,0dt
dpд > рд>(рзд+β).
при ,0dt
dpд < рд<(рзд-β).
На фиг. 3 схемата е свързана за работа на максимум. Нека да се проследи
действието на регулатора, ако рд започва да нараства от нула, т.е. рд<рзд и е
достатъчно малко, за да се намира извън хистерезисната зона. На изхода на
елемента 1 в този случай се формира налягането р1, съответстващо на логи-
ческа 0. Релето 2 работи като инвертор, следствие на което р2=1. р2 е управля-
ващо налягане на релетата 7 и 8. Положението на мембранния блок на тези ре-
лета ще се определя не от подпорното налягане в камери Б, а от управлява-щото
налягане в камери В.
За реле 7 горната дюза е отворена и свързана с атмосферата, а долната е
затворена. Вследствие на това камера В на сравняващия елемент 1 се оказва
свързана с атмосферата. За реле 8 горната дюза е отворена, а долната – затво-
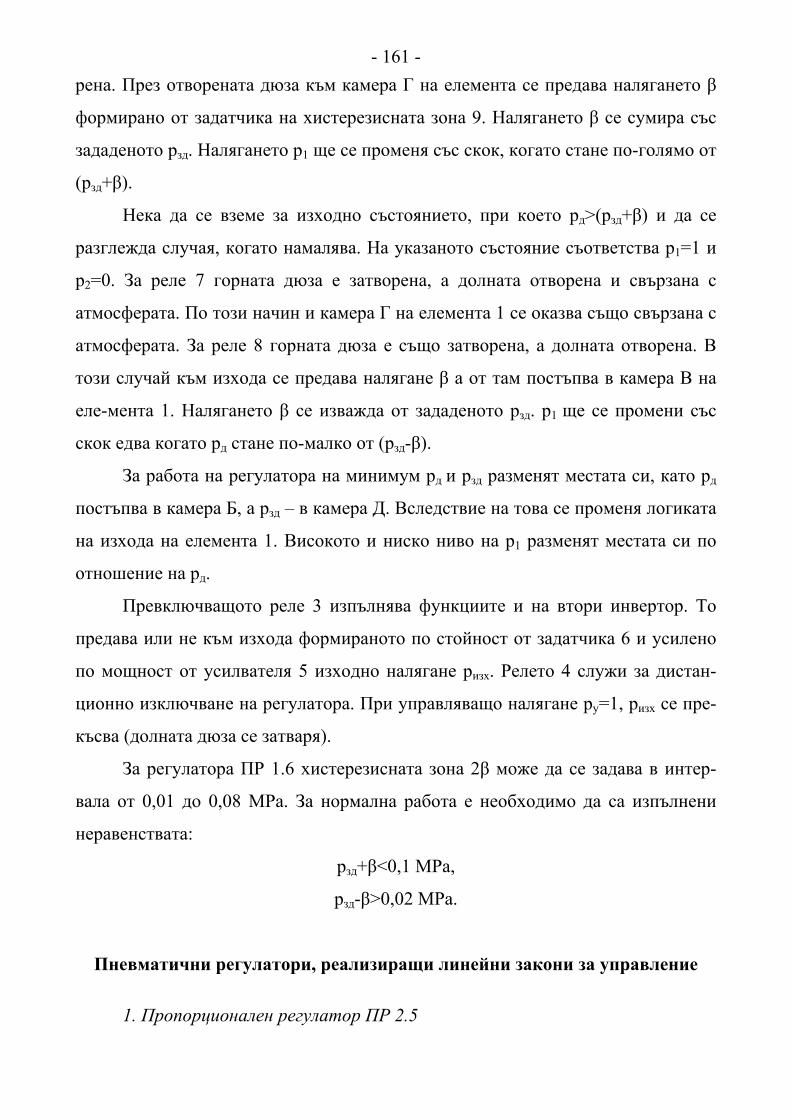
- 161 -рена. През отворената дюза към камера Г на елемента се предава налягането β
формирано от задатчика на хистерезисната зона 9. Налягането β се сумира със
зададеното рзд. Налягането р1 ще се променя със скок, когато стане по-голямо от
(рзд+β).
Нека да се вземе за изходно състоянието, при което рд>(рзд+β) и да се
разглежда случая, когато намалява. На указаното състояние съответства р1=1 и
р2=0. За реле 7 горната дюза е затворена, а долната отворена и свързана с
атмосферата. По този начин и камера Г на елемента 1 се оказва също свързана с
атмосферата. За реле 8 горната дюза е също затворена, а долната отворена. В
този случай към изхода се предава налягане β а от там постъпва в камера В на
еле-мента 1. Налягането β се изважда от зададеното рзд. р1 ще се промени със
скок едва когато рд стане по-малко от (рзд-β).
За работа на регулатора на минимум рд и рзд разменят местата си, като рд
постъпва в камера Б, а рзд – в камера Д. Вследствие на това се променя логиката
на изхода на елемента 1. Високото и ниско ниво на р1 разменят местата си по
отношение на рд.
Превключващото реле 3 изпълнява функциите и на втори инвертор. То
предава или не към изхода формираното по стойност от задатчика 6 и усилено
по мощност от усилвателя 5 изходно налягане ризх. Релето 4 служи за дистан-
ционно изключване на регулатора. При управляващо налягане ру=1, ризх се пре-
късва (долната дюза се затваря).
За регулатора ПР 1.6 хистерезисната зона 2β може да се задава в интер-
вала от 0,01 до 0,08 МРа. За нормална работа е необходимо да са изпълнени
неравенствата:
рзд+β<0,1 МРа,
рзд-β>0,02 МРа.
Пневматични регулатори, реализиращи линейни закони за управление
1. Пропорционален регулатор ПР 2.5
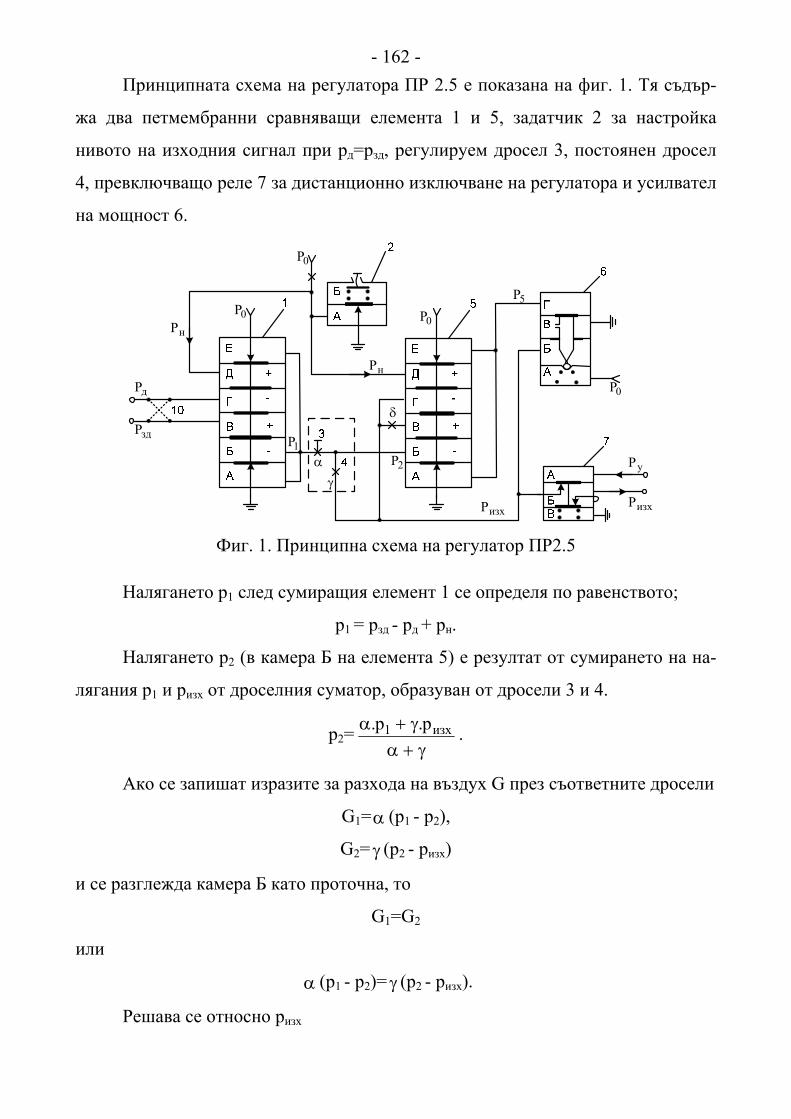
- 162 -Принципната схема на регулатора ПР 2.5 е показана на фиг. 1. Тя съдър-
жа два петмембранни сравняващи елемента 1 и 5, задатчик 2 за настройка
нивото на изходния сигнал при рд=рзд, регулируем дросел 3, постоянен дросел
4, превключващо реле 7 за дистанционно изключване на регулатора и усилвател
на мощност 6.
0P0P
дP
здP
0P
αγ
1P
δ
2P
0P
нР
нР
изхР изхР
уР
5P
Фиг. 1. Принципна схема на регулатор ПР2.5
Налягането р1 след сумиращия елемент 1 се определя по равенството;
р1 = рзд - рд + рн.
Налягането р2 (в камера Б на елемента 5) е резултат от сумирането на на-
лягания р1 и ризх от дроселния суматор, образуван от дросели 3 и 4.
р2=γ+αγ+α изх1 р.р. .
Ако се запишат изразите за разхода на въздух G през съответните дросели
G1=α (р1 - р2),
G2= γ (р2 - ризх)
и се разглежда камера Б като проточна, то
G1=G2
или
α (р1 - р2)= γ (р2 - ризх).
Решава се относно ризх

- 163 -
ризх=(1+γα ).р2-
γα .р1.
В установен режим р2=рн. В такъв случай
ризх=(1+γα )рн-
γα .р1.
Замества се р1 с неговото равно (р1 = рзд - рд + рн)
ризх=(1+γα )рн-
γα (рзд - рд + рн),
ризх=рн+γα рн-
γα рзд+
γα рд-
γα рн,
ризх=γα (рд - рзд) + рн.
Коефициентът на регулатора γα
=pk може да се изменя в границите от
0,033 до 20. Този диапазон съответства на зона на дроселиране от 5 до 3000%.
ризх= pk (рд - рзд) + рн.
Пневматичният сигнал на разсъгласуването се усилва чрез обхващане на
втория петмембранен суматор 5 с отрицателна обратна връзка. Предвидена е и
демпфираща обратна връзка през постоянния дросел .δ
Изведеното по-горе уравнение описва работата на идеализиран П-ре-
гулатор. Вземайки предвид малките обеми на камерите и наличието на дросе-
ли, протичат преходни процеси, които могат да се опишат с уравненията:
р1 = рзд - рд + рн = рн - Δ р,
,ppdt
dpT
,p.kp.kpdt
dpТ
изхб
12изх122
=+
+=+
δδ
γ
,pppp изх2н +=+δ
където .SRVT,
)(RV
T,k,k бб21
θθ
γγ =
γ+α=
γ+αα
=γ+α
γ=
Предавателната функция за разсъгласуването на реалния регулатор е
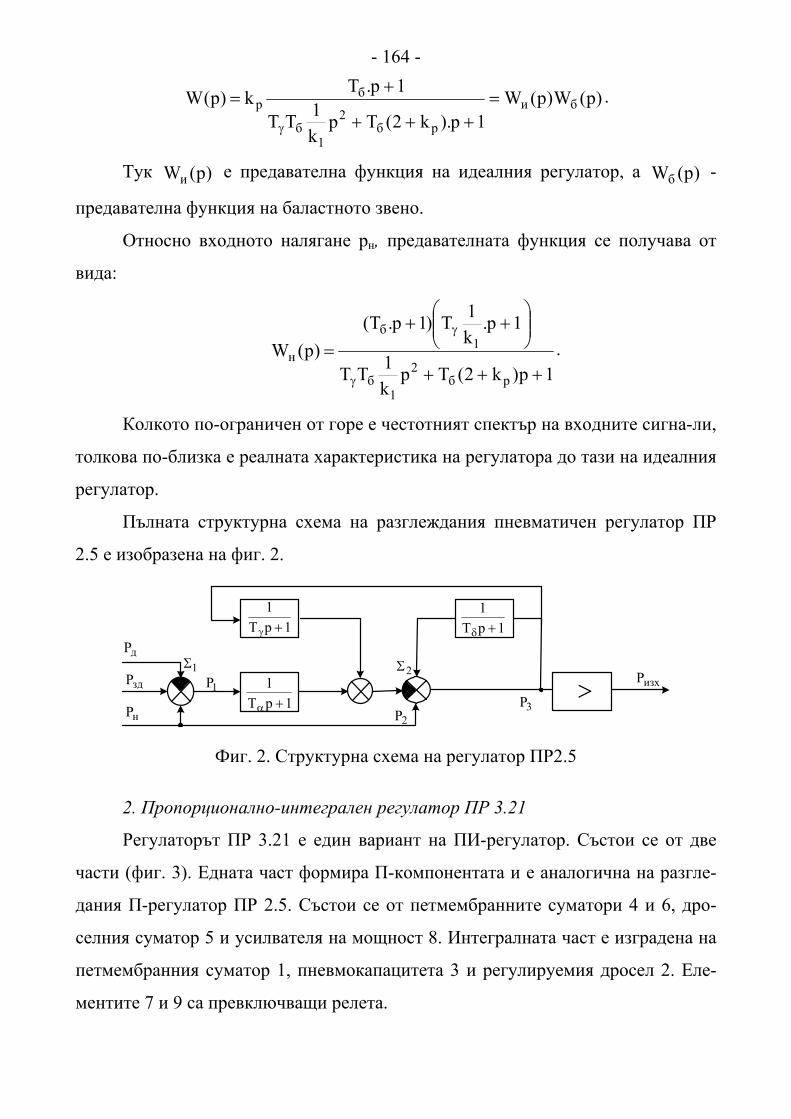
- 164 -
)p(W)p(W1p).k2(Tp
k1TT
1p.Tk)p(W би
pб2
1б
бp =
+++
+=
γ
.
Тук )p(Wи е предавателна функция на идеалния регулатор, а )p(Wб -
предавателна функция на баластното звено.
Относно входното налягане рн, предавателната функция се получава от
вида:
1p)k2(Tpk1TT
1p.k1T)1p.T(
)p(Wpб
2
1б
1б
н+++
⎟⎟⎠
⎞⎜⎜⎝
⎛++
=γ
γ
.
Колкото по-ограничен от горе е честотният спектър на входните сигна-ли,
толкова по-близка е реалната характеристика на регулатора до тази на идеалния
регулатор.
Пълната структурна схема на разглеждания пневматичен регулатор ПР
2.5 е изобразена на фиг. 2.
1рТ1+δ1рТ
1+γ
1рТ1+α
>
дP
нP
здP 1P
2P3P
1Σ 2ΣизхP
Фиг. 2. Структурна схема на регулатор ПР2.5
2. Пропорционално-интегрален регулатор ПР 3.21
Регулаторът ПР 3.21 е един вариант на ПИ-регулатор. Състои се от две
части (фиг. 3). Едната част формира П-компонентата и е аналогична на разгле-
дания П-регулатор ПР 2.5. Състои се от петмембранните суматори 4 и 6, дро-
селния суматор 5 и усилвателя на мощност 8. Интегралната част е изградена на
петмембранния суматор 1, пневмокапацитета 3 и регулируемия дросел 2. Еле-
ментите 7 и 9 са превключващи релета.
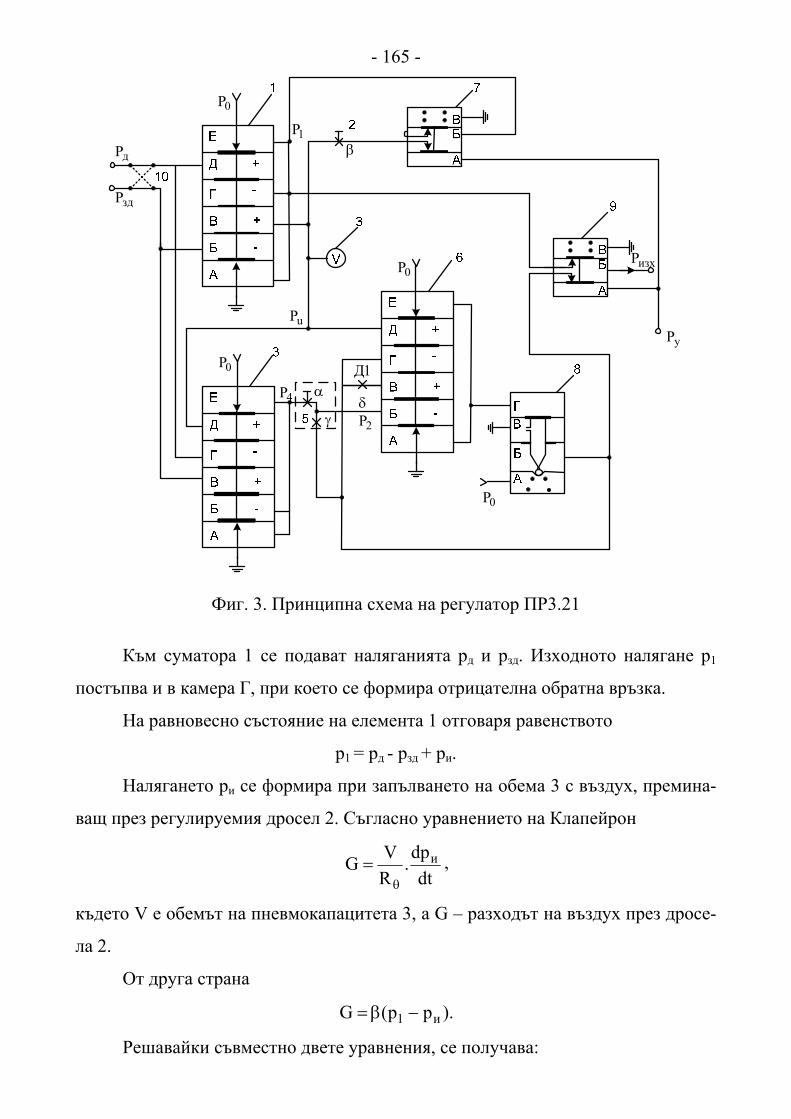
- 165 -
0P
дP
здP
0P
0P
0P
1Pβ
yP
изхP
2Pδ
1Дα
γ
4P
uP
Фиг. 3. Принципна схема на регулатор ПР3.21
Към суматора 1 се подават наляганията рд и рзд. Изходното налягане р1
постъпва и в камера Г, при което се формира отрицателна обратна връзка.
На равновесно състояние на елемента 1 отговаря равенството
р1 = рд - рзд + ри.
Налягането ри се формира при запълването на обема 3 с въздух, премина-
ващ през регулируемия дросел 2. Съгласно уравнението на Клапейрон
dtdp.
RVG и
θ= ,
където V е обемът на пневмокапацитета 3, а G – разходът на въздух през дросе-
ла 2.
От друга страна
).pp(G и1 −β=
Решавайки съвместно двете уравнения, се получава:
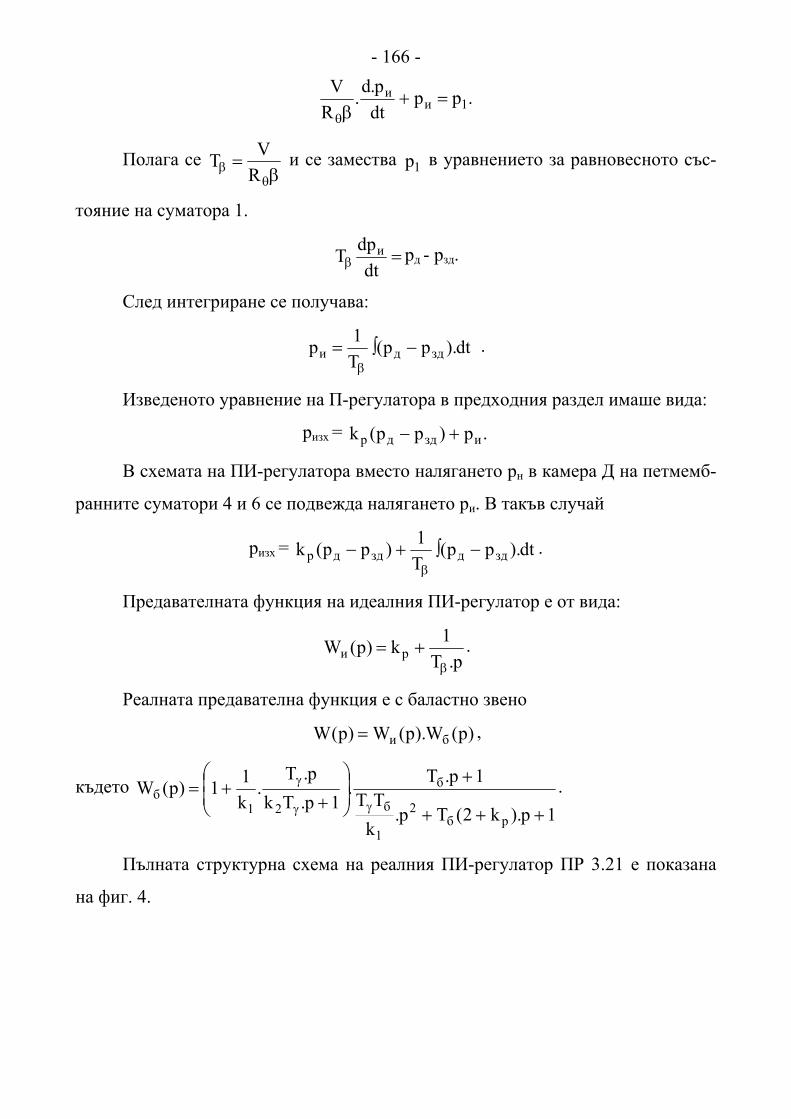
- 166 -
.ppdtp.d.
RV
1ии =+
βθ
Полага се β
=θ
β RVT и се замества 1p в уравнението за равновесното със-
тояние на суматора 1.
=β dtdpT и рд - рзд.
След интегриране се получава:
dt).pp(T1p здди −∫=β
.
Изведеното уравнение на П-регулатора в предходния раздел имаше вида:
ризх = .p)pp(k изддp +−
В схемата на ПИ-регулатора вместо налягането рн в камера Д на петмемб-
ранните суматори 4 и 6 се подвежда налягането ри. В такъв случай
ризх = dt).pp(T1)pp(k зддзддp −∫+−β
.
Предавателната функция на идеалния ПИ-регулатор е от вида:
p.T1k)p(W pиβ
+= .
Реалната предавателна функция е с баластно звено
)p(W).p(W)p(W би= ,
където 1p).k2(Tp.
kTT
1p.T.1p.Tk
p.T.
k11)p(W
pб2
1
б
б
21б
+++
+⎟⎟⎠
⎞⎜⎜⎝
⎛
++=
γγ
γ .
Пълната структурна схема на реалния ПИ-регулатор ПР 3.21 е показана
на фиг. 4.
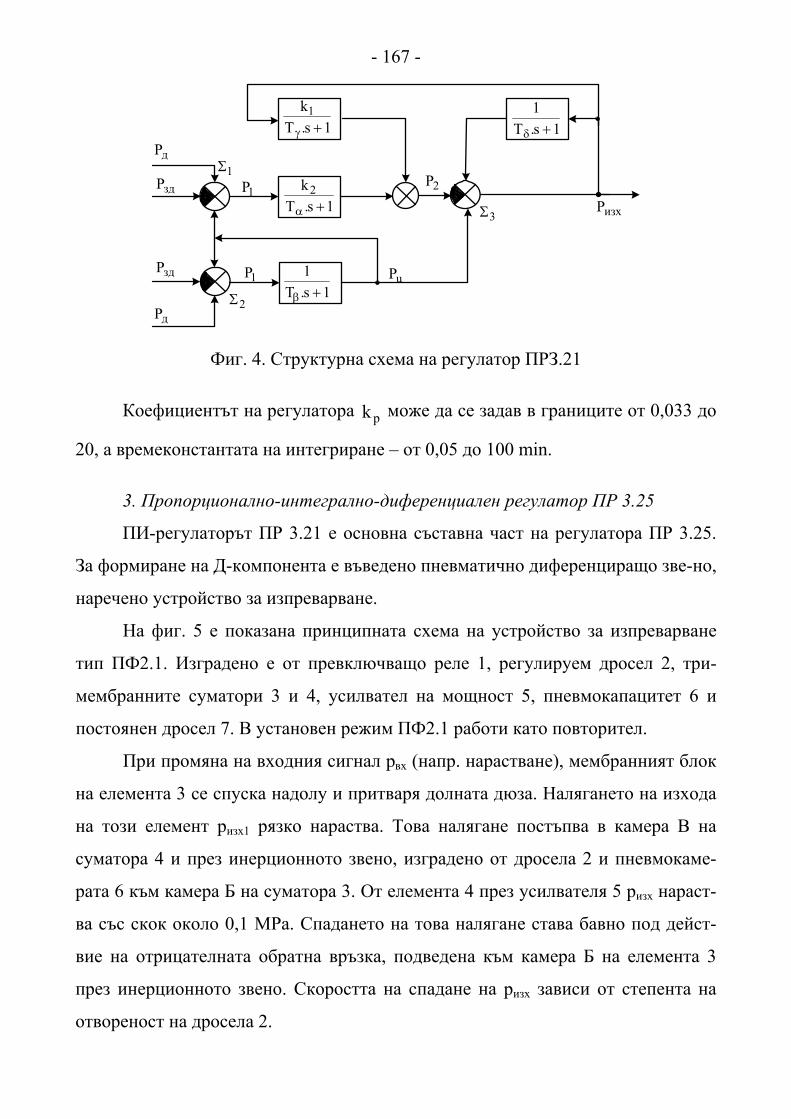
- 167 -
1s.Т1+δ1s.Т
k1+γ
1s.Тk2+α
дP
здP 1P 2P1Σ
3Σ изхP
1s.T1+β
1P
2ΣuPздP
дP
Фиг. 4. Структурна схема на регулатор ПРЗ.21
Коефициентът на регулатора pk може да се задав в границите от 0,033 до
20, а времеконстантата на интегриране – от 0,05 до 100 min.
3. Пропорционално-интегрално-диференциален регулатор ПР 3.25
ПИ-регулаторът ПР 3.21 е основна съставна част на регулатора ПР 3.25.
За формиране на Д-компонента е въведено пневматично диференциращо зве-но,
наречено устройство за изпреварване.
На фиг. 5 е показана принципната схема на устройство за изпреварване
тип ПФ2.1. Изградено е от превключващо реле 1, регулируем дросел 2, три-
мембранните суматори 3 и 4, усилвател на мощност 5, пневмокапацитет 6 и
постоянен дросел 7. В установен режим ПФ2.1 работи като повторител.
При промяна на входния сигнал рвх (напр. нарастване), мембранният блок
на елемента 3 се спуска надолу и притваря долната дюза. Налягането на изхода
на този елемент ризх1 рязко нараства. Това налягане постъпва в камера В на
суматора 4 и през инерционното звено, изградено от дросела 2 и пневмокаме-
рата 6 към камера Б на суматора 3. От елемента 4 през усилвателя 5 ризх нараст-
ва със скок около 0,1 МРа. Спадането на това налягане става бавно под дейст-
вие на отрицателната обратна връзка, подведена към камера Б на елемента 3
през инерционното звено. Скоростта на спадане на ризх зависи от степента на
отвореност на дросела 2.
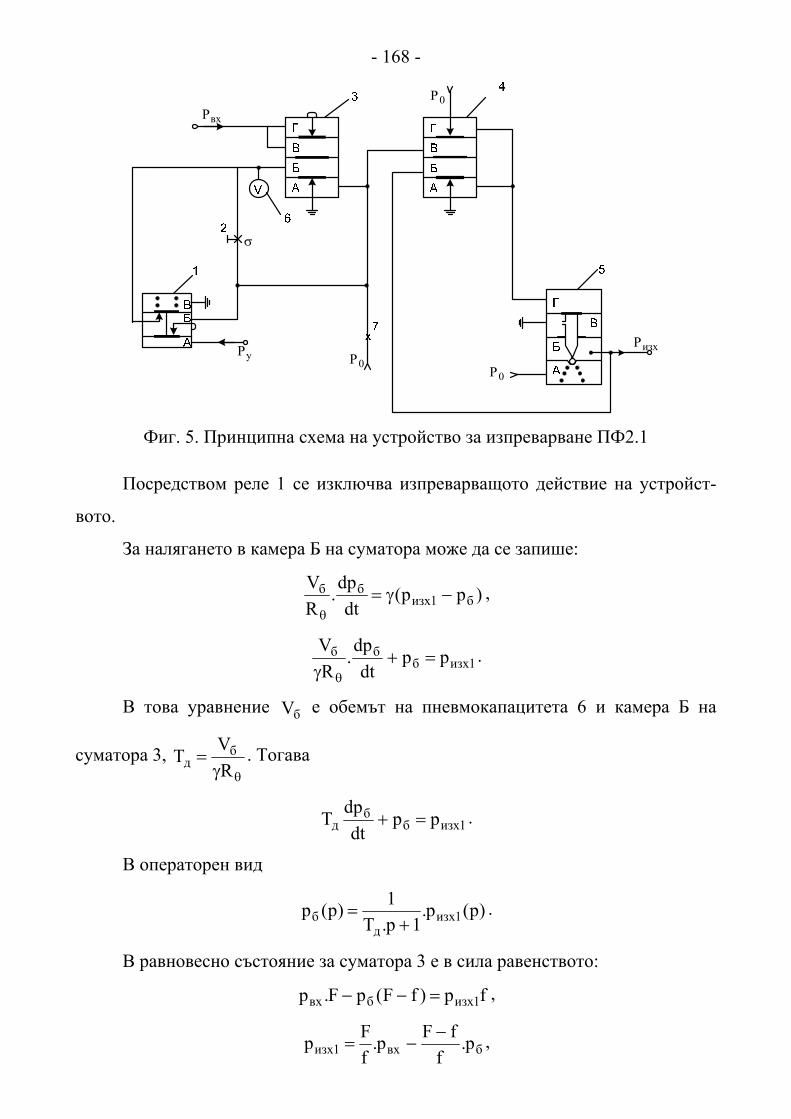
- 168 -
0Р
изхР
0Р0РyР
вхР
σ
Фиг. 5. Принципна схема на устройство за изпреварване ПФ2.1
Посредством реле 1 се изключва изпреварващото действие на устройст-
вото.
За налягането в камера Б на суматора може да се запише:
)pp(dt
dp.RV
б1изхбб −γ=
θ
,
1изхббб pp
dtdp.
RV
=+γ θ
.
В това уравнение бV е обемът на пневмокапацитета 6 и камера Б на
суматора 3, θγ
=RVT б
д . Тогава
1изхбб
д ppdt
dpT =+ .
В операторен вид
)p(p.1p.T
1)p(p 1изхд
б += .
В равновесно състояние за суматора 3 е в сила равенството:
fp)fF(pF.p 1изхбвх =−− ,
бвх1изх p.f
fFp.fFp −
−= ,
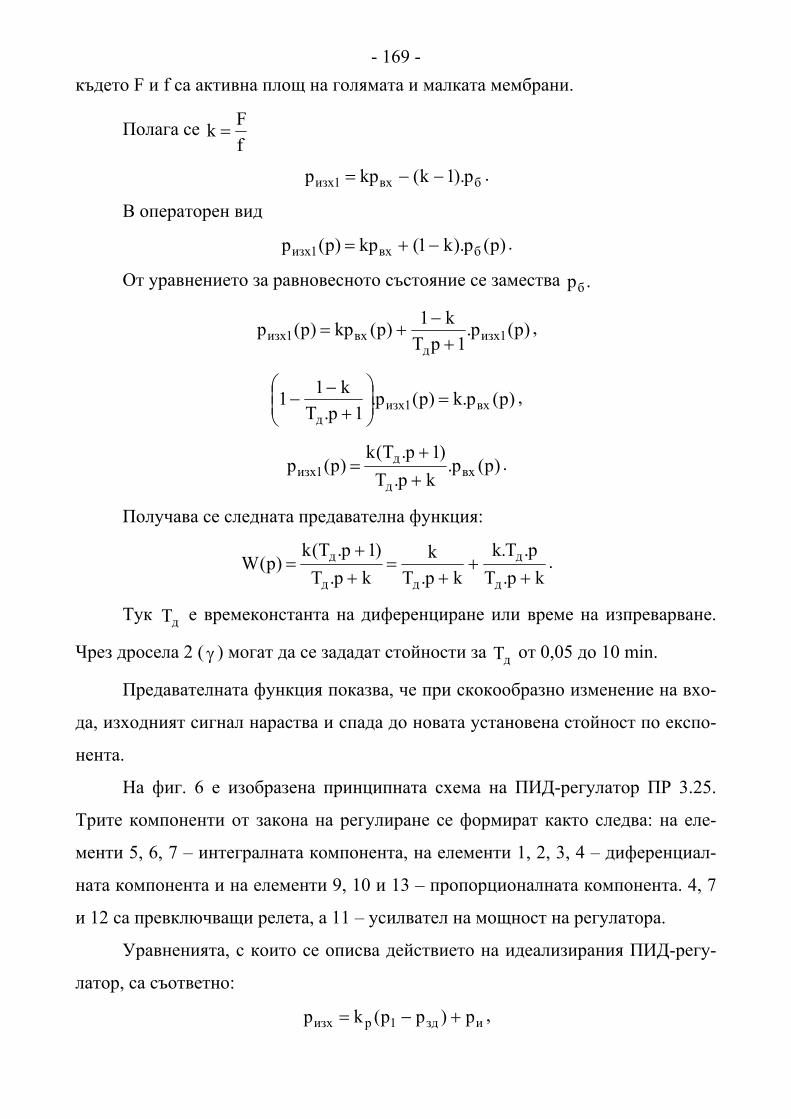
- 169 -където F и f са активна площ на голямата и малката мембрани.
Полага се fFk =
бвх1изх p).1k(kpp −−= .
В операторен вид
)p(p).k1(kp)p(p бвх1изх −+= .
От уравнението за равновесното състояние се замества .pб
)p(p.1pT
k1)p(kp)p(p 1изхд
вх1изх +−
+= ,
)p(p.k)p(p.1p.T
k11 вх1изхд
=⎟⎟⎠
⎞⎜⎜⎝
⎛
+−
− ,
)p(p.kp.T
)1p.T(k)p(p вх
д
д1изх +
+= .
Получава се следната предавателна функция:
kp.Tp.T.k
kp.Tk
kp.T)1p.T(k
)p(Wд
д
дд
д
++
+=
++
= .
Тук дT е времеконстанта на диференциране или време на изпреварване.
Чрез дросела 2 ( γ ) могат да се зададат стойности за дT от 0,05 до 10 min.
Предавателната функция показва, че при скокообразно изменение на вхо-
да, изходният сигнал нараства и спада до новата установена стойност по експо-
нента.
На фиг. 6 е изобразена принципната схема на ПИД-регулатор ПР 3.25.
Трите компоненти от закона на регулиране се формират както следва: на еле-
менти 5, 6, 7 – интегралната компонента, на елементи 1, 2, 3, 4 – диференциал-
ната компонента и на елементи 9, 10 и 13 – пропорционалната компонента. 4, 7
и 12 са превключващи релета, а 11 – усилвател на мощност на регулатора.
Уравненията, с които се описва действието на идеализирания ПИД-регу-
латор, са съответно:
изд1pизх p)pp(kp +−= ,
- 170 -
)pp(p.T
1p зддu −=β
,
дб1 p).1p.T(p += .
0P
дP
здP
0P
0P
1P
β
δ
2Дα
γ
uP
0P
σ
1Д
изхP
0P
1с
1с
2с
2с
yP
Фиг. 6. Принципна схема на регулатор ПР3.25
Изключвайки междинните променливи, относно разсъгласуването
)рр(р здд −=Δ се получава:
dtdpТkdt)рр(
Т1)рp(kр 1'
бpзддзддpизх +−∫+−=β
,
където pk е коефициент на усилване; θ
ββ β=
RV
Т - интегрираща времеконстанта;
б'б T
fFТ = - диференцираща времеконстанта.
Параметрите на настройка на регулатора ПР 3.25 могат да се зададат в
границите: за βТ от 3 s до 100 min (чрез дросела β ), за бТ от 3 s до 10 min (чрез
дросела δ ) и за pk от 0,03 до 20 (чрез дросела α ).
- 171 -
ХИДРАВЛИЧНИ РЕГУЛАТОРИ
Елементи и възли на хидравлини регулатори
В качеството на носител на енергия и информация, при хидравличните
регулатори е течност (обикновено трансформаторно масло под налягане).
Основното предимство на хидравличните регулатори е тяхната простота.
В следствие на това те притежават висока надеждност.
Задаващите устройства конструктивно са съставна част на регулаторите.
Хидравличните датчици възприемат технологични величини като налягане, ни-
во, разлика в наляганията и др. и ги преобразуват в преместване или сила.
Изпълнителните хидравлични механизми (ХИМ) се характеризират с го-
лямо бързодействие. При едни и същи габарити, в сравнение с електрическите и
пневматичните. ХИМ развиват няколко пъти по-голяма сила. Без обратна
връзка ХИМ, заедно с усилвателя, представляват интегриращо звено.
Във вертикална посока максималното разстояние за предаване на инфор-
мация между усилвателя и изпълнителния механизъм може да достига да 25 ÷
50 m, а в хоризонтално направление – 100 ÷ 150 m. Връзката се осъществява
посредством тръбни съединителни линии. В съчетание с електрическа управ-
ляема част, ХИМ намират значително приложение в практиката.
Блокова схема на хидравличен регулатор е показана на фиг. 1.
вхх х
3х
y
Фиг. 1. Блокова схема на хидравличен регулатор
Във формирането на алгоритъма участва и ХИМ. Основен елемент е хид-
равличният преобразувател – усилвател (ХПУ). Към него постъпват сигналите
от датчика Д, от задатчика ЗД и от обратната връзка ОВ. Видът на регулатора се
определя от вида на хидравличния преобразувател ХП. Различават се:
- 172 -- струйни хидравлични регулатори,
- плужерни хидравлични регулатори,
- дроселни хидравлични регулатори.
Схемата на преобразувател със струйна тръба е показана на фиг. 2.
Фиг. 2. Преобразувател със струйна тръба
Към струйната тръба 9 постъпва масло под налягане и изтича през
коничен отвор в кутията 5 срещу приемните дюзи 6. Посредством винта 3,
пружината 2 и лоста 4 се формира заданието, а входното въздействие във вид
на преместване се предава чрез лоста 8. Лостът 1 премества опората между
струйната тръба 9 и лоста 4, която изпълнява функциите на коректор. Изходите
– дюзите 6 се подвеждат към ХИМ. Струйната тръба 9 може да се завърта на
малък ъгъл около оста 11. Преместването се ограничава от винтовете 7. Когато
тръбата 9 е в средно положение, изтичащото от нея масло създава еднакво
налягане в дюзите 6 и свързаните с тях тръбопроводи. При преместване
надясно, дясната дюза 6 се оказва точно срещу тръбата 9. Съответно налягането
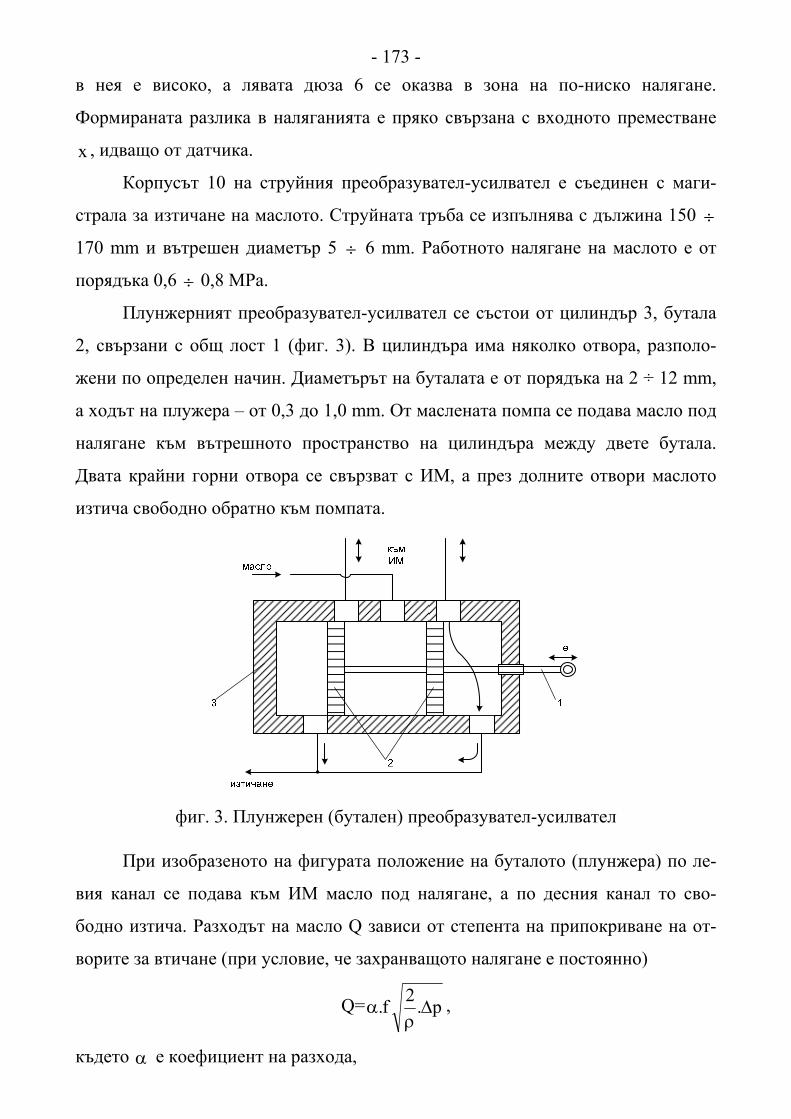
- 173 -в нея е високо, а лявата дюза 6 се оказва в зона на по-ниско налягане.
Формираната разлика в наляганията е пряко свързана с входното преместване
x , идващо от датчика.
Корпусът 10 на струйния преобразувател-усилвател е съединен с маги-
страла за изтичане на маслото. Струйната тръба се изпълнява с дължина 150 ÷
170 mm и вътрешен диаметър 5 ÷ 6 mm. Работното налягане на маслото е от
порядъка 0,6 ÷ 0,8 МРа.
Плунжерният преобразувател-усилвател се състои от цилиндър 3, бутала
2, свързани с общ лост 1 (фиг. 3). В цилиндъра има няколко отвора, разполо-
жени по определен начин. Диаметърът на буталата е от порядъка на 2 ÷ 12 mm,
а ходът на плужера – от 0,3 до 1,0 mm. От маслената помпа се подава масло под
налягане към вътрешното пространство на цилиндъра между двете бутала.
Двата крайни горни отвора се свързват с ИМ, а през долните отвори маслото
изтича свободно обратно към помпата.
фиг. 3. Плунжерен (бутален) преобразувател-усилвател
При изобразеното на фигурата положение на буталото (плунжера) по ле-
вия канал се подава към ИМ масло под налягане, а по десния канал то сво-
бодно изтича. Разходът на масло Q зависи от степента на припокриване на от-
ворите за втичане (при условие, че захранващото налягане е постоянно)
Q= p.2f. Δρ
α ,
където α е коефициент на разхода,
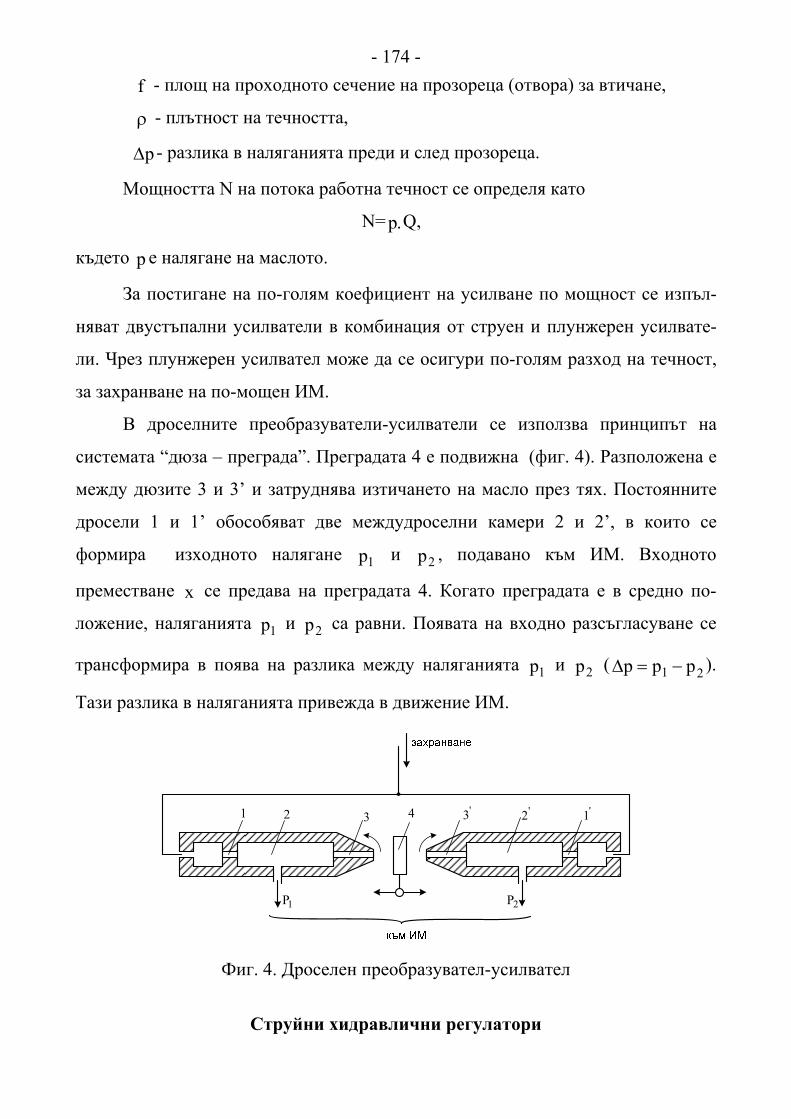
- 174 - f - площ на проходното сечение на прозореца (отвора) за втичане,
ρ - плътност на течността,
рΔ - разлика в наляганията преди и след прозореца.
Мощността N на потока работна течност се определя като
N= .p Q,
където p е налягане на маслото.
За постигане на по-голям коефициент на усилване по мощност се изпъл-
няват двустъпални усилватели в комбинация от струен и плунжерен усилвате-
ли. Чрез плунжерен усилвател може да се осигури по-голям разход на течност,
за захранване на по-мощен ИМ.
В дроселните преобразуватели-усилватели се използва принципът на
системата “дюза – преграда”. Преградата 4 е подвижна (фиг. 4). Разположена е
между дюзите 3 и 3’ и затруднява изтичането на масло през тях. Постоянните
дросели 1 и 1’ обособяват две междудроселни камери 2 и 2’, в които се
формира изходното налягане 1p и 2р , подавано към ИМ. Входното
преместване x се предава на преградата 4. Когато преградата е в средно по-
ложение, наляганията 1p и 2р са равни. Появата на входно разсъгласуване се
трансформира в поява на разлика между наляганията 1р и 2р ( 21 ррр −=Δ ).
Тази разлика в наляганията привежда в движение ИМ.
1P 2P
2 '1'2'331 4
Фиг. 4. Дроселен преобразувател-усилвател
Струйни хидравлични регулатори
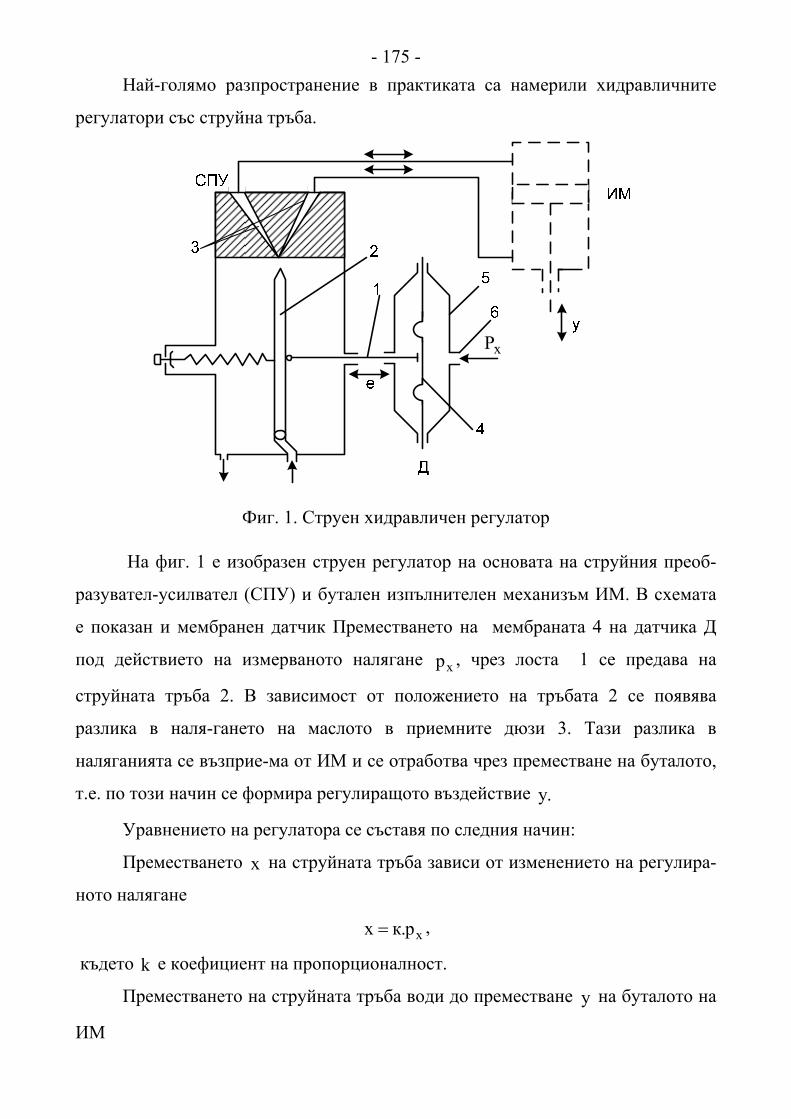
- 175 -Най-голямо разпространение в практиката са намерили хидравличните
регулатори със струйна тръба.
xP
Фиг. 1. Струен хидравличен регулатор
На фиг. 1 е изобразен струен регулатор на основата на струйния преоб-
разувател-усилвател (СПУ) и бутален изпълнителен механизъм ИМ. В схемата
е показан и мембранен датчик Преместването на мембраната 4 на датчика Д
под действието на измерваното налягане xp , чрез лоста 1 се предава на
струйната тръба 2. В зависимост от положението на тръбата 2 се появява
разлика в наля-гането на маслото в приемните дюзи 3. Тази разлика в
наляганията се възприе-ма от ИМ и се отработва чрез преместване на буталото,
т.е. по този начин се формира регулиращото въздействие .y
Уравнението на регулатора се съставя по следния начин:
Преместването x на струйната тръба зависи от изменението на регулира-
ното налягане
xр.кx = ,
където k е коефициент на пропорционалност.
Преместването на струйната тръба води до преместване y на буталото на
ИМ
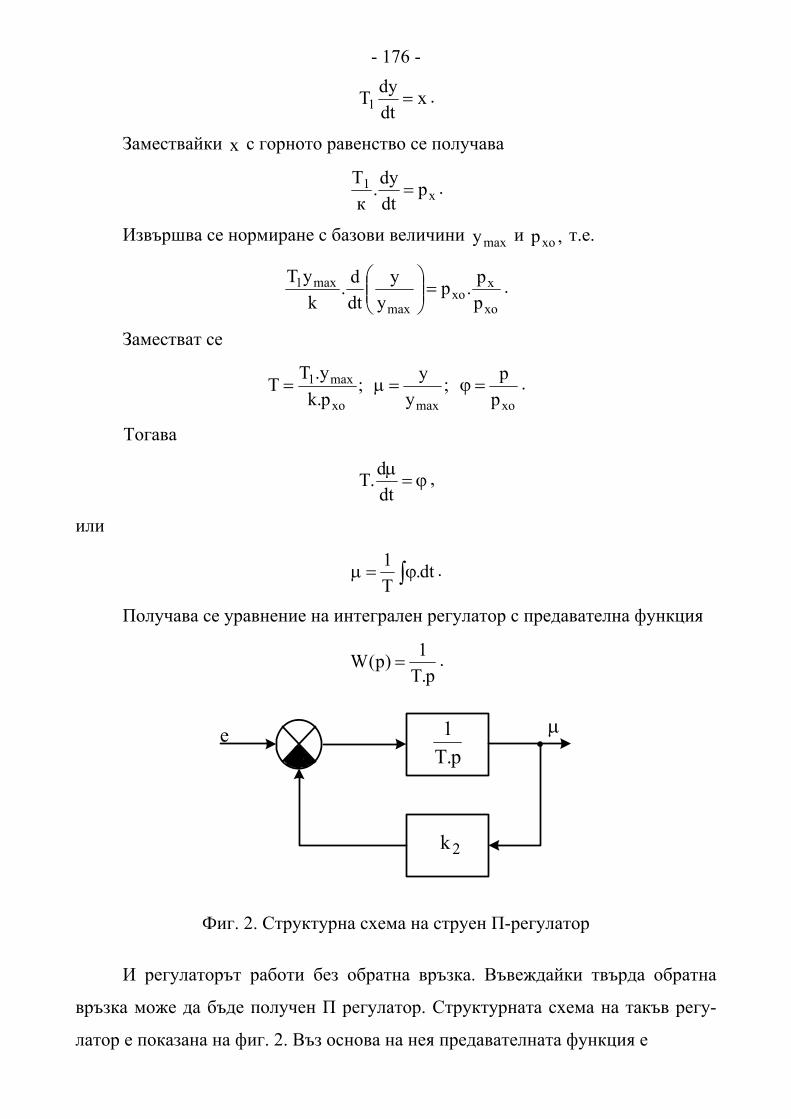
- 176 -
xdtdyT1 = .
Замествайки x с горното равенство се получава
x1 p
dtdy.
кТ
= .
Извършва се нормиране с базови величини maxy и ,pxo т.е.
xo
xxo
max
max1pp.p
yy
dtd.
kyT
=⎟⎟⎠
⎞⎜⎜⎝
⎛ .
Заместват се
xomaxxo
max1pp;
yy;
p.ky.TT =ϕ=μ= .
Тогава
ϕ=μ
dtd.T ,
или
∫ϕ=μ dt.Т1 .
Получава се уравнение на интегрален регулатор с предавателна функция
р.Т1)р(W = .
p.T1
2k
e μ
Фиг. 2. Структурна схема на струен П-регулатор
И регулаторът работи без обратна връзка. Въвеждайки твърда обратна
връзка може да бъде получен П регулатор. Структурната схема на такъв регу-
латор е показана на фиг. 2. Въз основа на нея предавателната функция е
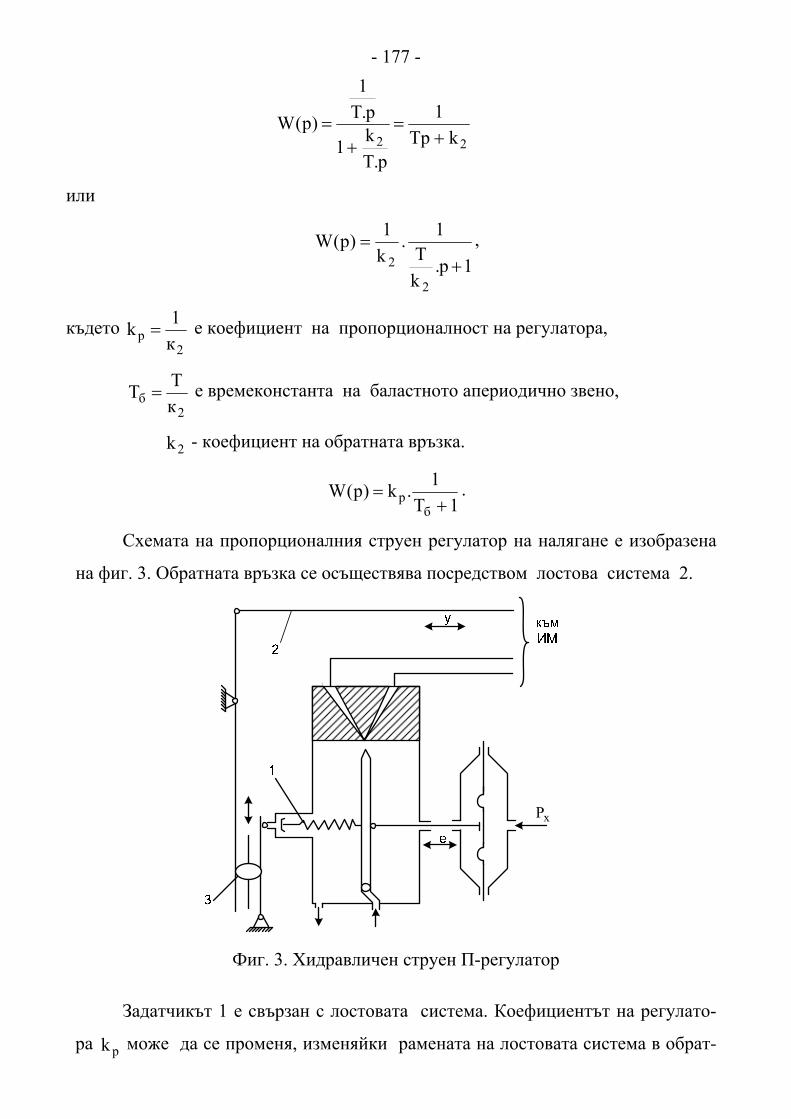
- 177 -
22 kTp
1
p.Tk1
p.T1
)p(W+
=+
=
или
1p.kT
1.k1)p(W
2
2 += ,
където 2
р к1k = е коефициент на пропорционалност на регулатора,
2
б кТT = е времеконстанта на баластното апериодично звено,
2k - коефициент на обратната връзка.
1T1.k)p(Wб
p += .
Схемата на пропорционалния струен регулатор на налягане е изобразена
на фиг. 3. Обратната връзка се осъществява посредством лостова система 2.
xP
Фиг. 3. Хидравличен струен П-регулатор
Задатчикът 1 е свързан с лостовата система. Коефициентът на регулато-
ра рk може да се променя, изменяйки рамената на лостовата система в обрат-
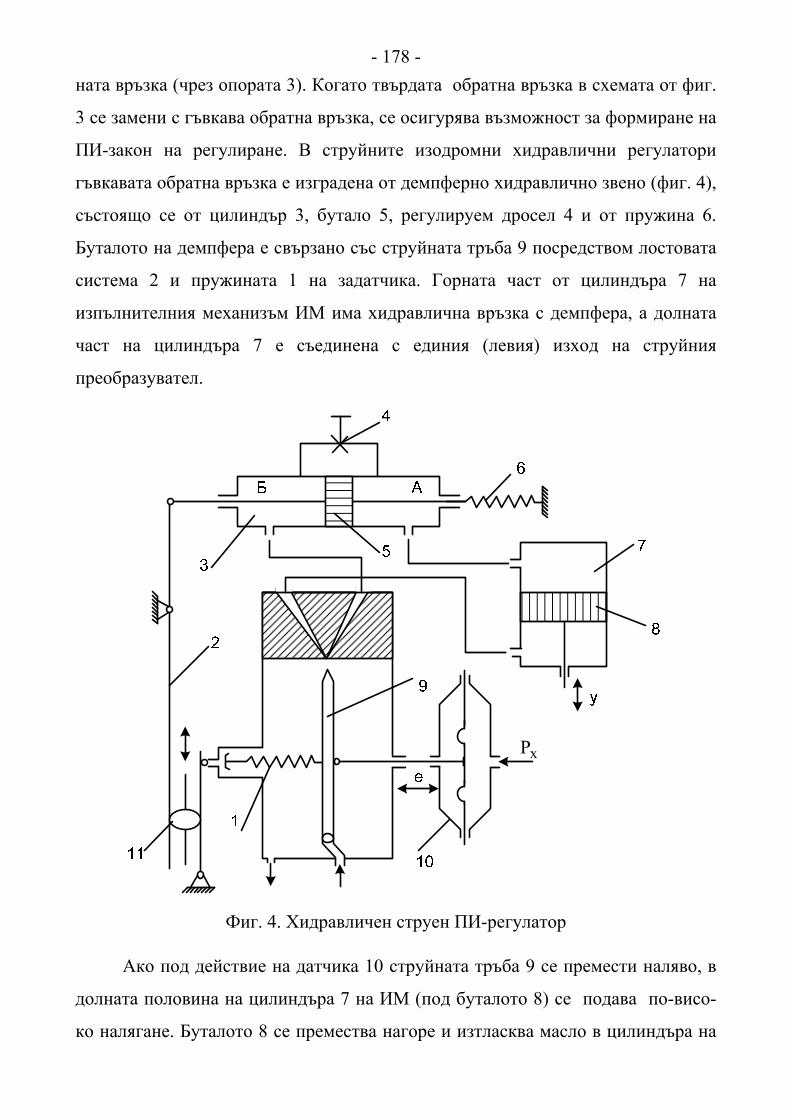
- 178 -ната връзка (чрез опората 3). Когато твърдата обратна връзка в схемата от фиг.
3 се замени с гъвкава обратна връзка, се осигурява възможност за формиране на
ПИ-закон на регулиране. В струйните изодромни хидравлични регулатори
гъвкавата обратна връзка е изградена от демпферно хидравлично звено (фиг. 4),
състоящо се от цилиндър 3, бутало 5, регулируем дросел 4 и от пружина 6.
Буталото на демпфера е свързано със струйната тръба 9 посредством лостовата
система 2 и пружината 1 на задатчика. Горната част от цилиндъра 7 на
изпълнителния механизъм ИМ има хидравлична връзка с демпфера, а долната
част на цилиндъра 7 е съединена с единия (левия) изход на струйния
преобразувател.
xP
Фиг. 4. Хидравличен струен ПИ-регулатор
Ако под действие на датчика 10 струйната тръба 9 се премести наляво, в
долната половина на цилиндъра 7 на ИМ (под буталото 8) се подава по-висо-
ко налягане. Буталото 8 се премества нагоре и изтласква масло в цилиндъра на
- 179 -демпфера, като следствие буталото 5 на демпфера се премества наляво. Чрез
лостовата система 2, опората 11 и пружината 1 се въздейства на струйната тръ-
ба 7 за връщането и надясно, т.е. противоположно на преместването, предиз-
викано от датчика 10. Движението на буталото 8 все още на се прекратява.
Когато буталото 5 се премества наляво, пружината 6 се разтяга. Тя запасява в
себе си енергия, която се стреми да я свие. Под действие на тази сила бутало--то
5 се връща надясно. Налягането в зона А нараства и през дросела 4 масло
изтича в зона Б, стремейки се наляганията в зоните А и Б да се изравнят.
Допълнителното преместване на буталото 5 наляво чрез лостовата система 2,
води до обратно връщане наляво на струйната тръба 9.
Нека да се състави уравнението и предавателната функция на регулатора.
Преместването x на струйната тръба 9 зависи от налягането и от пре-
местването y на изходното звено на ИМ
λ−= 2x1 kркx ,
където 1k и 2k са коефициентите на пропорционалност, а λ - преместване на
струйната тръба под действието на обратната връзка.
Гъвкавата обратна връзка представлява реално диференциращо звено и
се описва с уравнението
dtdyT
dtdT =λ+λ .
Предавателната функция е от вида
)p(y)р(
1p.Tp.T)p(Wов
λ=
+= .
Изпълнителният механизъм има предавателна функция на интегриращо
звено
)p(x)p(y
р.Т1)р(Wим
им == .
Изхождайки от горните изрази, чрез заместване се получава
⎥⎦
⎤⎢⎣
⎡+
−= )p(y.1p.T
p.Tk)p(pkp.T
1)p(y 2x1им
.
- 180 -След преобразуване последователно се достига до операторните уравне-
ния:
)p(p).1p.T(k)p(y.p.Tk)p(y).1р.Т(р.T x12им +=++ ,
( )[ ] )p(p).1p.T(k)p(y.р.Т.кТимр.Т.Тим x122 +=++ .
Изхождайки от обстоятелството, че имT е много по-малка от ,Т може да
се пренебрегне .Tим Това означава, че не се взема под внимание баластното
звено на реалния регулатор, защото то внася незначително изкривяване на
регулатора. Получава се операторното уравнение на регулатора
)p(p).1p.T(k)p(y.р.Т.k x12 += .
На това уравнение в операторна форма съответства предавателната функ-
ция на ПИ-регулатор
p.T1p.T.k
)p(p)p(y)р(W
x
+== ,
където 2
1
ккk = е коефициент на усилване на регулатора, а Т е интегрираща
времеконстанта или време на изодрома.
Настройката на k става чрез лостовата система 2 в обратната връзка (фиг.
4), а настройката на T - чрез регулируемия дросел 4.
Хидравличните регулатори намират приложение най-вече там, където е
необходимо изпълнителният механизъм да развива по-голяма сила. Използват
се за регулиране на разход, на съотношение на разход в два тръбопровода, на
налягане, на температура и др.
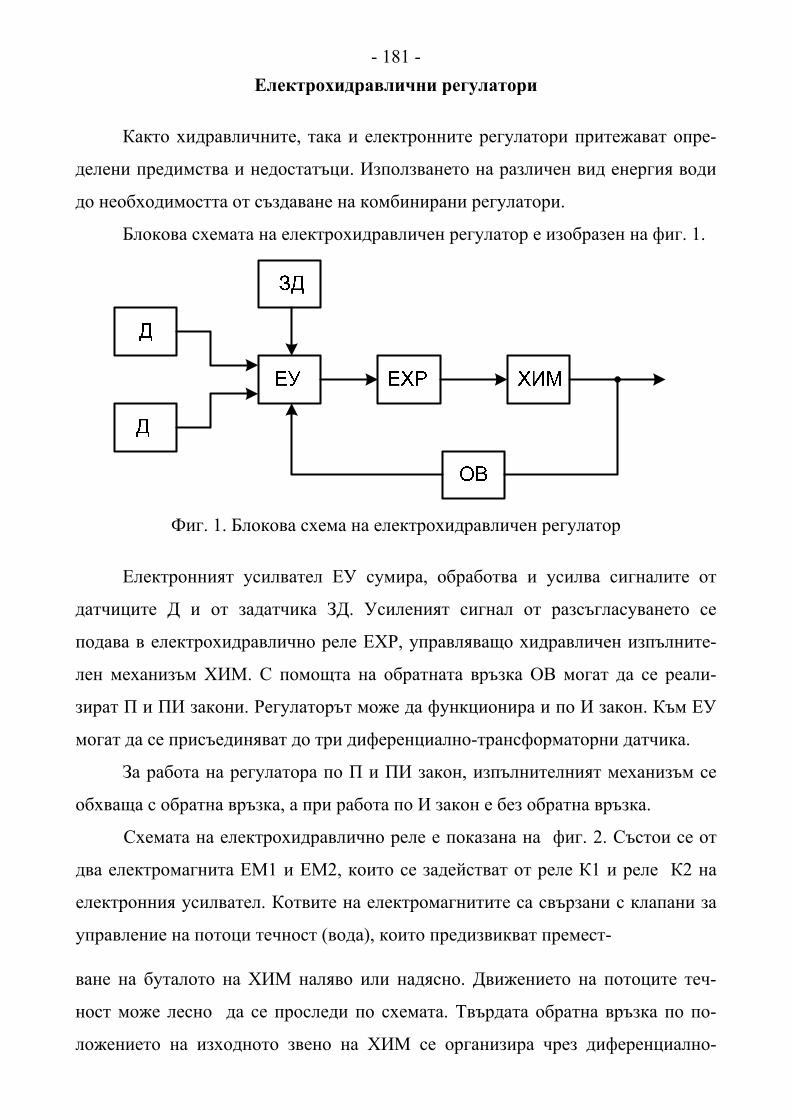
- 181 -Електрохидравлични регулатори
Както хидравличните, така и електронните регулатори притежават опре-
делени предимства и недостатъци. Използването на различен вид енергия води
до необходимостта от създаване на комбинирани регулатори.
Блокова схемата на електрохидравличен регулатор е изобразен на фиг. 1.
Фиг. 1. Блокова схема на електрохидравличен регулатор
Електронният усилвател ЕУ сумира, обработва и усилва сигналите от
датчиците Д и от задатчика ЗД. Усиленият сигнал от разсъгласуването се
подава в електрохидравлично реле ЕХР, управляващо хидравличен изпълните-
лен механизъм ХИМ. С помощта на обратната връзка ОВ могат да се реали-
зират П и ПИ закони. Регулаторът може да функционира и по И закон. Към ЕУ
могат да се присъединяват до три диференциално-трансформаторни датчика.
За работа на регулатора по П и ПИ закон, изпълнителният механизъм се
обхваща с обратна връзка, а при работа по И закон е без обратна връзка.
Схемата на електрохидравлично реле е показана на фиг. 2. Състои се от
два електромагнита ЕМ1 и ЕМ2, които се задействат от реле К1 и реле К2 на
електронния усилвател. Котвите на електромагнитите са свързани с клапани за
управление на потоци течност (вода), които предизвикват премест-
ване на буталото на ХИМ наляво или надясно. Движението на потоците теч-
ност може лесно да се проследи по схемата. Твърдата обратна връзка по по-
ложението на изходното звено на ХИМ се организира чрез диференциално-
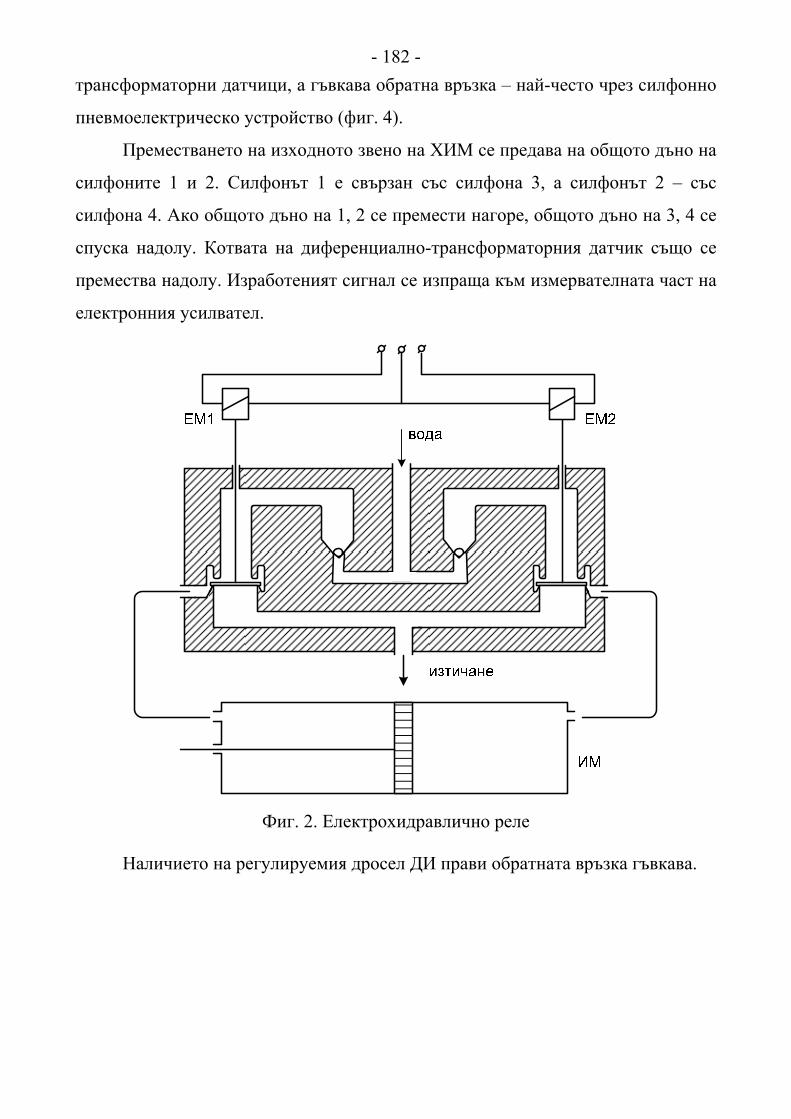
- 182 -трансформаторни датчици, а гъвкава обратна връзка – най-често чрез силфонно
пневмоелектрическо устройство (фиг. 4).
Преместването на изходното звено на ХИМ се предава на общото дъно на
силфоните 1 и 2. Силфонът 1 е свързан със силфона 3, а силфонът 2 – със
силфона 4. Ако общото дъно на 1, 2 се премести нагоре, общото дъно на 3, 4 се
спуска надолу. Котвата на диференциално-трансформаторния датчик също се
премества надолу. Изработеният сигнал се изпраща към измервателната част на
електронния усилвател.
Фиг. 2. Електрохидравлично реле
Наличието на регулируемия дросел ДИ прави обратната връзка гъвкава.
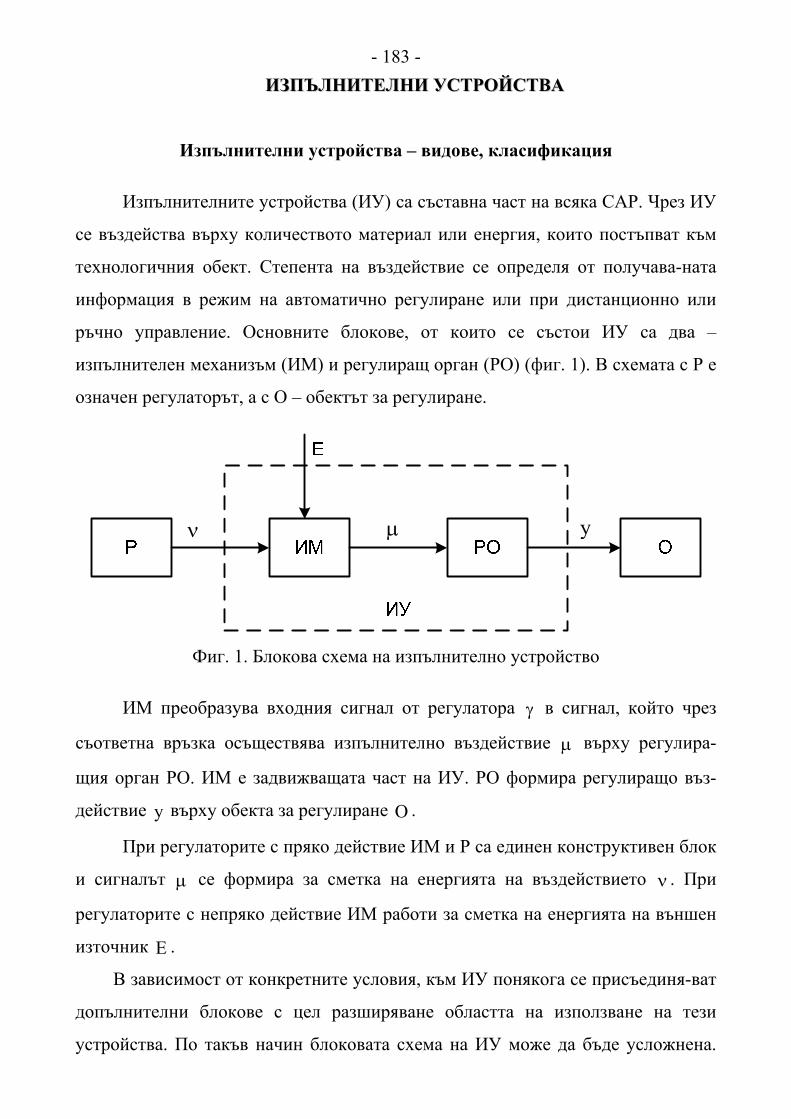
- 183 -ИИЗЗППЪЪЛЛННИИТТЕЕЛЛННИИ УУССТТРРООЙЙССТТВВАА
Изпълнителни устройства – видове, класификация
Изпълнителните устройства (ИУ) са съставна част на всяка САР. Чрез ИУ
се въздейства върху количеството материал или енергия, които постъпват към
технологичния обект. Степента на въздействие се определя от получава-ната
информация в режим на автоматично регулиране или при дистанционно или
ръчно управление. Основните блокове, от които се състои ИУ са два –
изпълнителен механизъм (ИМ) и регулиращ орган (РО) (фиг. 1). В схемата с Р е
означен регулаторът, а с О – обектът за регулиране.
ν μ y
Фиг. 1. Блокова схема на изпълнително устройство
ИМ преобразува входния сигнал от регулатора γ в сигнал, който чрез
съответна връзка осъществява изпълнително въздействие μ върху регулира-
щия орган РО. ИМ е задвижващата част на ИУ. РО формира регулиращо въз-
действие y върху обекта за регулиране O .
При регулаторите с пряко действие ИМ и Р са единен конструктивен блок
и сигналът μ се формира за сметка на енергията на въздействието ν . При
регулаторите с непряко действие ИМ работи за сметка на енергията на външен
източник E .
В зависимост от конкретните условия, към ИУ понякога се присъединя-ват
допълнителни блокове с цел разширяване областта на използване на тези
устройства. По такъв начин блоковата схема на ИУ може да бъде усложнена.
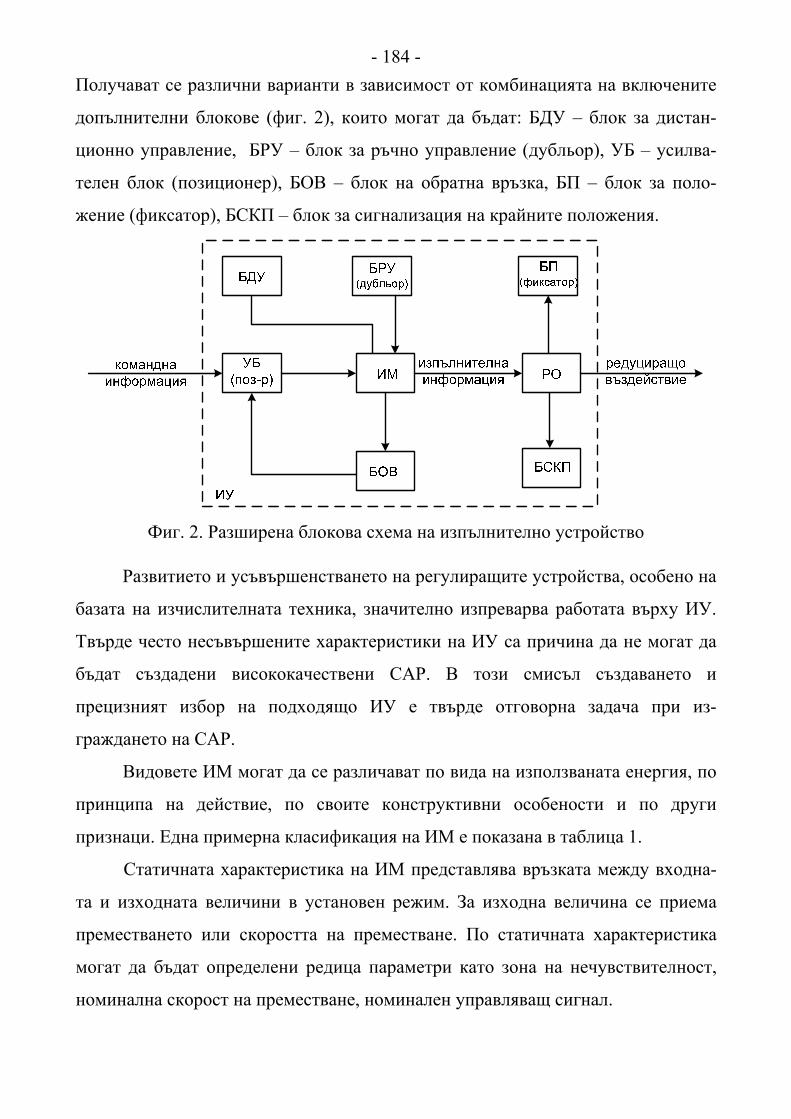
- 184 -Получават се различни варианти в зависимост от комбинацията на включените
допълнителни блокове (фиг. 2), които могат да бъдат: БДУ – блок за дистан-
ционно управление, БРУ – блок за ръчно управление (дубльор), УБ – усилва-
телен блок (позиционер), БОВ – блок на обратна връзка, БП – блок за поло-
жение (фиксатор), БСКП – блок за сигнализация на крайните положения.
Фиг. 2. Разширена блокова схема на изпълнително устройство
Развитието и усъвършенстването на регулиращите устройства, особено на
базата на изчислителната техника, значително изпреварва работата върху ИУ.
Твърде често несъвършените характеристики на ИУ са причина да не могат да
бъдат създадени висококачествени САР. В този смисъл създаването и
прецизният избор на подходящо ИУ е твърде отговорна задача при из-
граждането на САР.
Видовете ИМ могат да се различават по вида на използваната енергия, по
принципа на действие, по своите конструктивни особености и по други
признаци. Една примерна класификация на ИМ е показана в таблица 1.
Статичната характеристика на ИМ представлява връзката между входна-
та и изходната величини в установен режим. За изходна величина се приема
преместването или скоростта на преместване. По статичната характеристика
могат да бъдат определени редица параметри като зона на нечувствителност,
номинална скорост на преместване, номинален управляващ сигнал.
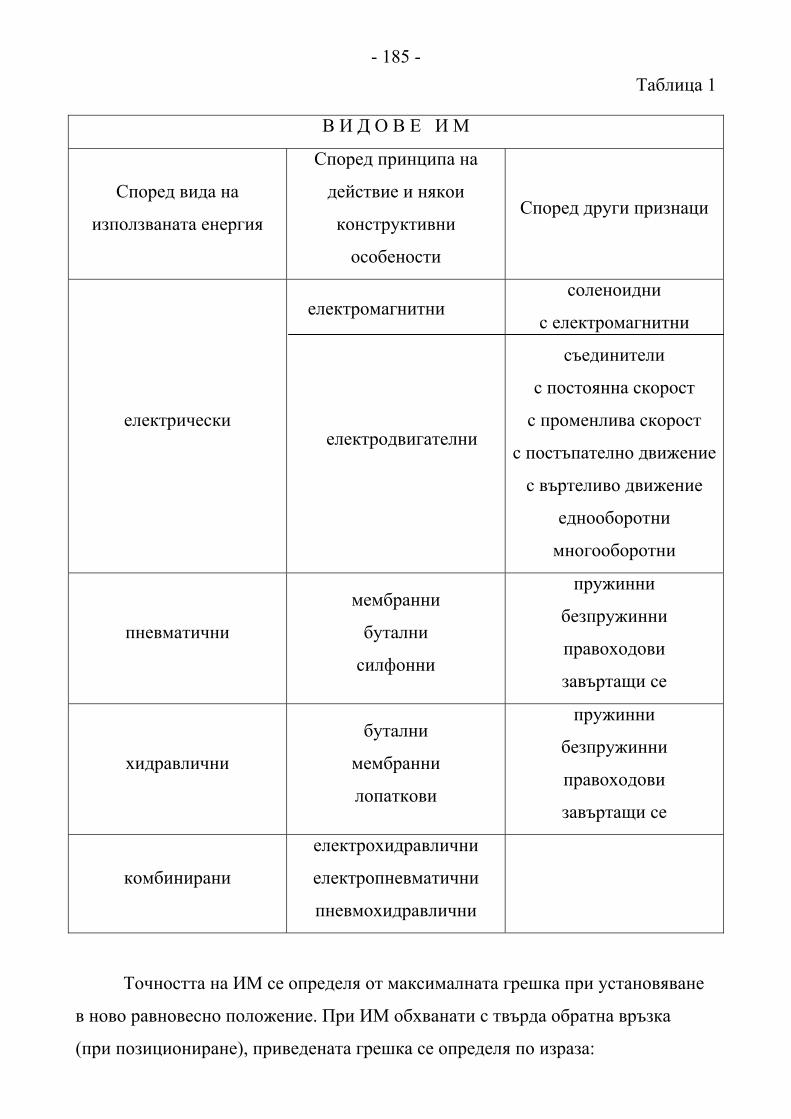
- 185 -Таблица 1
В И Д О В Е И М
Според вида на
използваната енергия
Според принципа на
действие и някои
конструктивни
особености
Според други признаци
електрически
електромагнитни
електродвигателни
соленоидни
с електромагнитни
съединители
с постоянна скорост
с променлива скорост
с постъпателно движение
с въртеливо движение
еднооборотни
многооборотни
пневматични
мембранни
бутални
силфонни
пружинни
безпружинни
правоходови
завъртащи се
хидравлични
бутални
мембранни
лопаткови
пружинни
безпружинни
правоходови
завъртащи се
комбинирани
електрохидравлични
електропневматични
пневмохидравлични
Точността на ИМ се определя от максималната грешка при установяване
в ново равновесно положение. При ИМ обхванати с твърда обратна връзка
(при позициониране), приведената грешка се определя по израза:
- 186 -
%100.EЕЕЕ
minmaxпр −
Δ= ,
където ( minmax EE − ) е диапазон на изменение на входния сигнал на ИМ;
EΔ е разликата между най – голямата и най – малката стойности на
входния сигнал, при които по датчика за обратна връзка изходният сигнал на
ИМ все още на се е изменил.
Когато ИМ се управлява чрез продължителността на входния сигнал
,%100.TtEпр
Δ= ,
където T е времето за преместване на изходното звено на ИМ от едното крайно
положение до другото,
tΔ - най – малката продължителност на входния импулс, предизвикващ
преместване на изходното звено на ИМ.
Регулиращите органи РО са съставна част на изпълнителните устройства.
РО като елемент на системите за автоматизация непосредствено въздействат
върху количеството енергия или материал, подавани към обекта.
РО се различават по своята конструкция, габарити и материал, от който са
изработени.
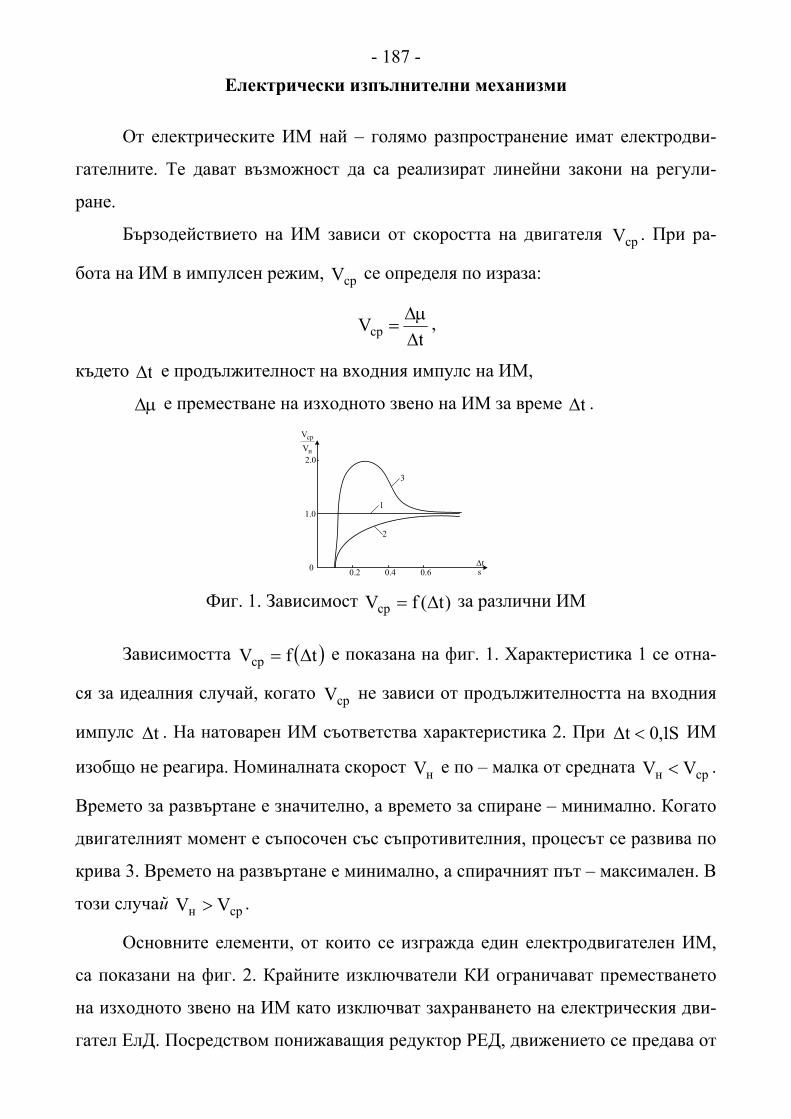
- 187 -Електрически изпълнителни механизми
От електрическите ИМ най – голямо разпространение имат електродви-
гателните. Те дават възможност да са реализират линейни закони на регули-
ране.
Бързодействието на ИМ зависи от скоростта на двигателя срV . При ра-
бота на ИМ в импулсен режим, срV се определя по израза:
tVср Δ
μΔ= ,
където tΔ е продължителност на входния импулс на ИМ,
μΔ е преместване на изходното звено на ИМ за време tΔ .
н
ср
VV
tΔs0 2.0 4.0 6.0
0.1
0.2
1
2
3
Фиг. 1. Зависимост )t(fVср Δ= за различни ИМ
Зависимостта ( )tfVср Δ= е показана на фиг. 1. Характеристика 1 се отна-
ся за идеалния случай, когато срV не зависи от продължителността на входния
импулс tΔ . На натоварен ИМ съответства характеристика 2. При S1,0t <Δ ИМ
изобщо не реагира. Номиналната скорост нV е по – малка от средната срн VV < .
Времето за развъртане е значително, а времето за спиране – минимално. Когато
двигателният момент е съпосочен със съпротивителния, процесът се развива по
крива 3. Времето на развъртане е минимално, а спирачният път – максимален. В
този случай срн VV > .
Основните елементи, от които се изгражда един електродвигателен ИМ,
са показани на фиг. 2. Крайните изключватели КИ ограничават преместването
на изходното звено на ИМ като изключват захранването на електрическия дви-
гател ЕлД. Посредством понижаващия редуктор РЕД, движението се предава от
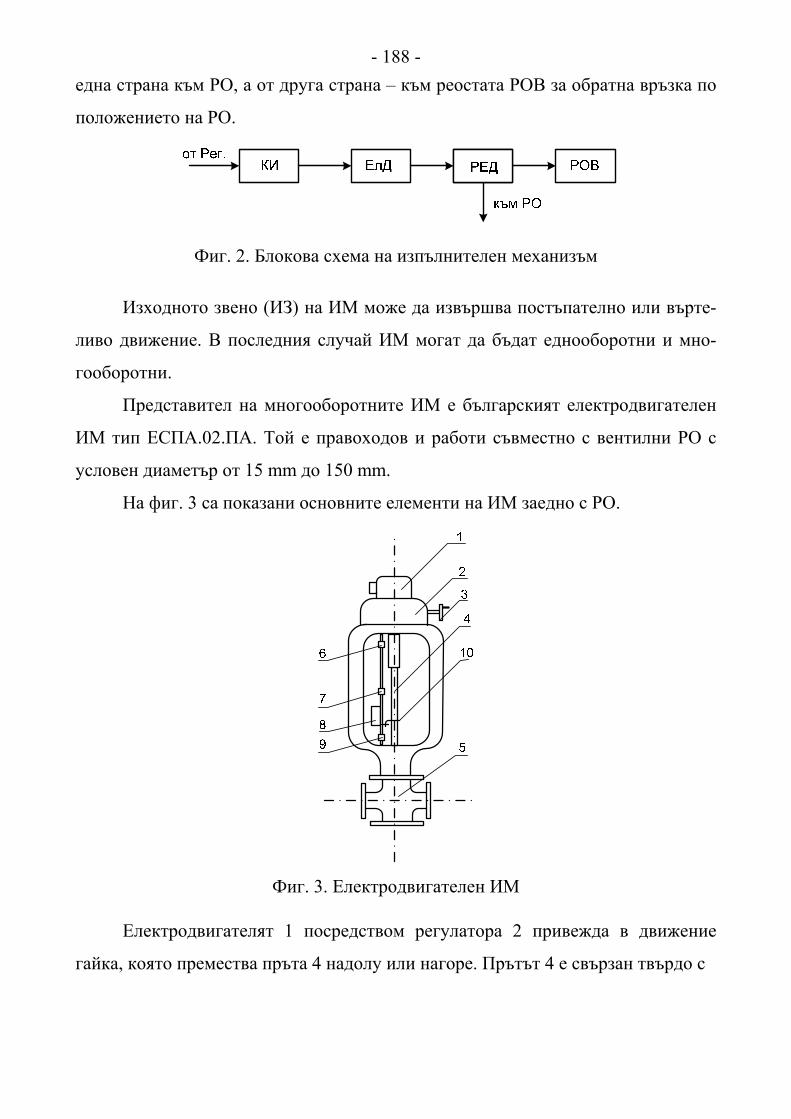
- 188 -една страна към РО, а от друга страна – към реостата РОВ за обратна връзка по
положението на РО.
Фиг. 2. Блокова схема на изпълнителен механизъм
Изходното звено (ИЗ) на ИМ може да извършва постъпателно или върте-
ливо движение. В последния случай ИМ могат да бъдат еднооборотни и мно-
гооборотни.
Представител на многооборотните ИМ е българският електродвигателен
ИМ тип ЕСПА.02.ПА. Той е правоходов и работи съвместно с вентилни РО с
условен диаметър от 15 mm до 150 mm.
На фиг. 3 са показани основните елементи на ИМ заедно с РО.
Фиг. 3. Електродвигателен ИМ
Електродвигателят 1 посредством регулатора 2 привежда в движение
гайка, която премества пръта 4 надолу или нагоре. Прътът 4 е свързан твърдо с
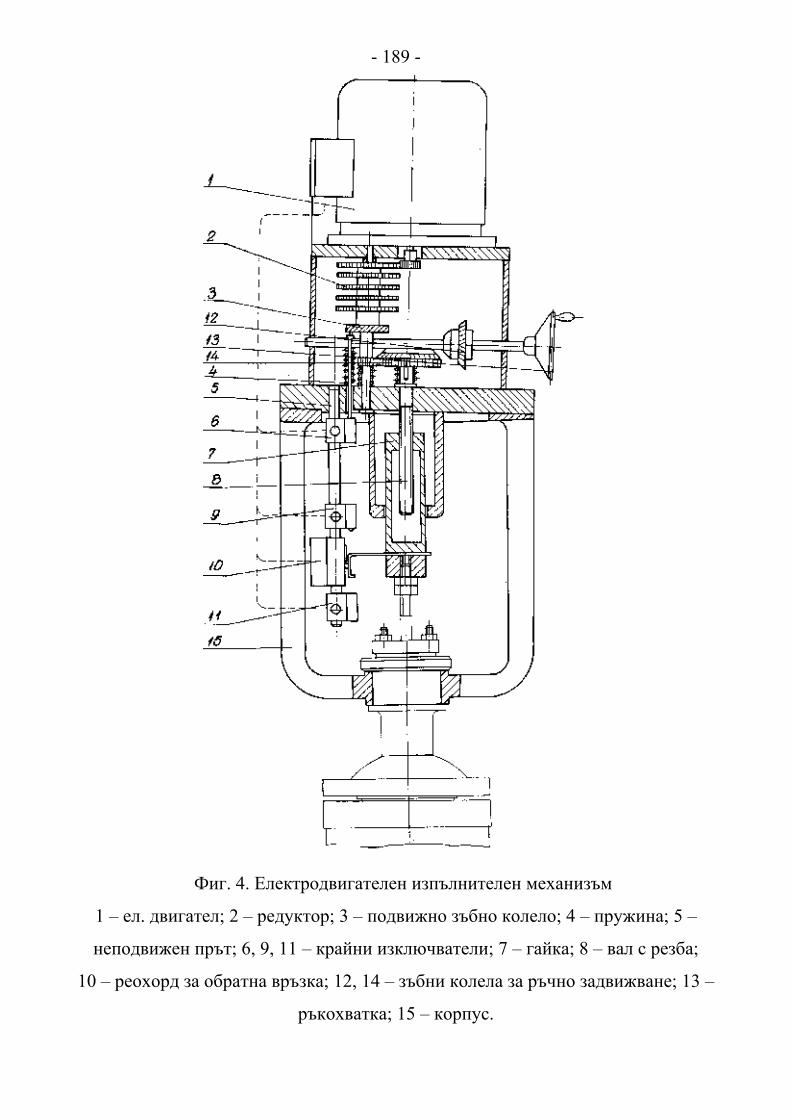
- 189 -
Фиг. 4. Електродвигателен изпълнителен механизъм
1 – ел. двигател; 2 – редуктор; 3 – подвижно зъбно колело; 4 – пружина; 5 –
неподвижен прът; 6, 9, 11 – крайни изключватели; 7 – гайка; 8 – вал с резба;
10 – реохорд за обратна връзка; 12, 14 – зъбни колела за ръчно задвижване; 13 –
ръкохватка; 15 – корпус.
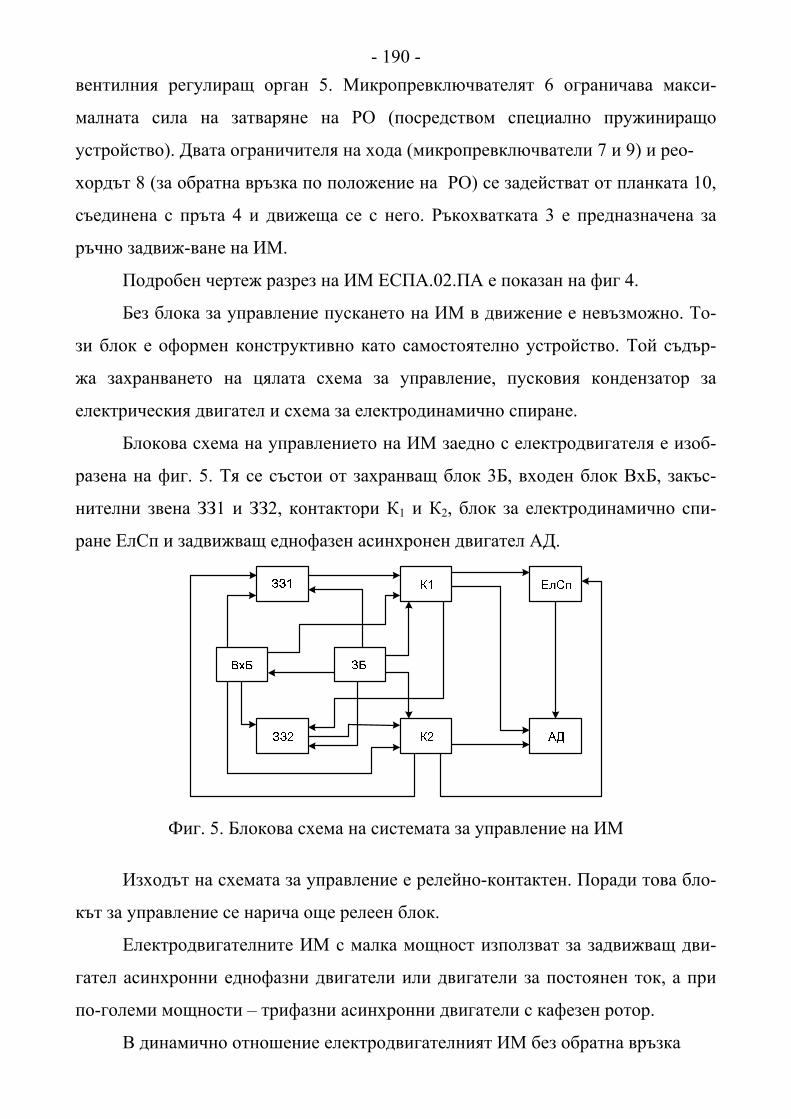
- 190 -вентилния регулиращ орган 5. Микропревключвателят 6 ограничава макси-
малната сила на затваряне на РО (посредством специално пружиниращо
устройство). Двата ограничителя на хода (микропревключватели 7 и 9) и рео-
хордът 8 (за обратна връзка по положение на РО) се задействат от планката 10,
съединена с пръта 4 и движеща се с него. Ръкохватката 3 е предназначена за
ръчно задвиж-ване на ИМ.
Подробен чертеж разрез на ИМ ЕСПА.02.ПА е показан на фиг 4.
Без блока за управление пускането на ИМ в движение е невъзможно. То-
зи блок е оформен конструктивно като самостоятелно устройство. Той съдър-
жа захранването на цялата схема за управление, пусковия кондензатор за
електрическия двигател и схема за електродинамично спиране.
Блокова схема на управлението на ИМ заедно с електродвигателя е изоб-
разена на фиг. 5. Тя се състои от захранващ блок 3Б, входен блок ВхБ, закъс-
нителни звена ЗЗ1 и ЗЗ2, контактори К1 и К2, блок за електродинамично спи-
ране ЕлСп и задвижващ еднофазен асинхронен двигател АД.
Фиг. 5. Блокова схема на системата за управление на ИМ
Изходът на схемата за управление е релейно-контактен. Поради това бло-
кът за управление се нарича още релеен блок.
Електродвигателните ИМ с малка мощност използват за задвижващ дви-
гател асинхронни еднофазни двигатели или двигатели за постоянен ток, а при
по-големи мощности – трифазни асинхронни двигатели с кафезен ротор.
В динамично отношение електродвигателният ИМ без обратна връзка
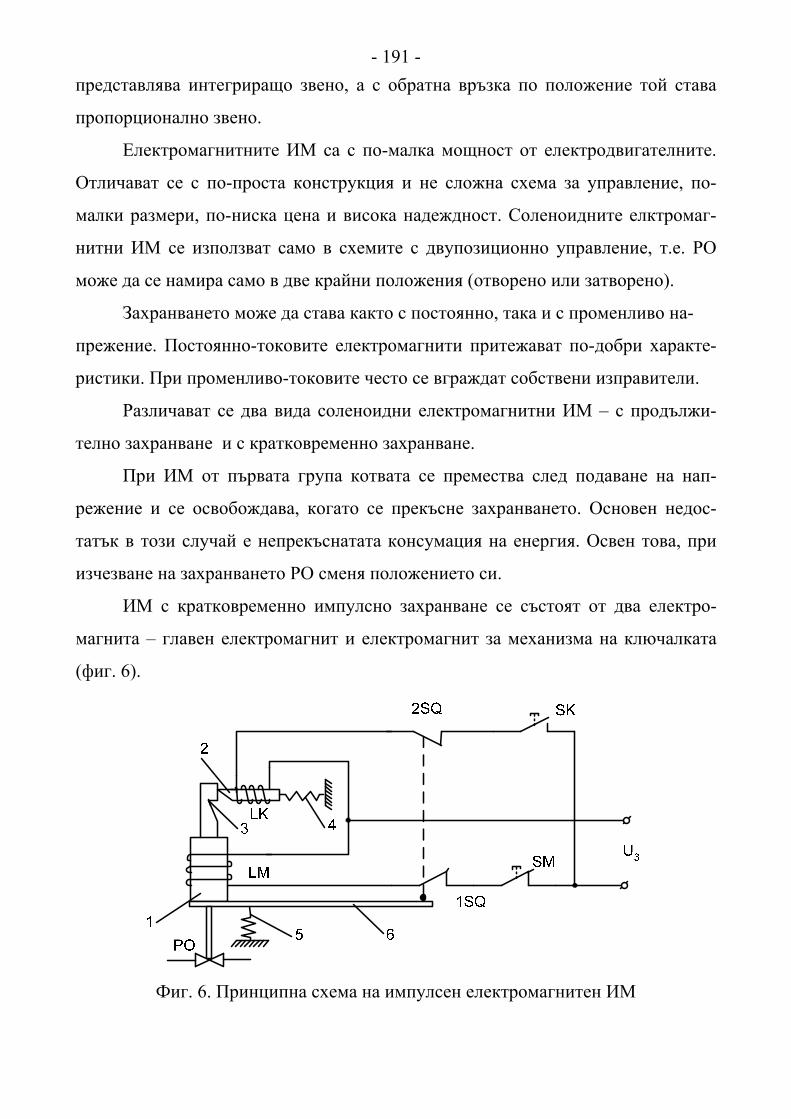
- 191 -представлява интегриращо звено, а с обратна връзка по положение той става
пропорционално звено.
Електромагнитните ИМ са с по-малка мощност от електродвигателните.
Отличават се с по-проста конструкция и не сложна схема за управление, по-
малки размери, по-ниска цена и висока надеждност. Соленоидните елктромаг-
нитни ИМ се използват само в схемите с двупозиционно управление, т.е. РО
може да се намира само в две крайни положения (отворено или затворено).
Захранването може да става както с постоянно, така и с променливо на-
прежение. Постоянно-токовите електромагнити притежават по-добри характе-
ристики. При променливо-токовите често се вграждат собствени изправители.
Различават се два вида соленоидни електромагнитни ИМ – с продължи-
телно захранване и с кратковременно захранване.
При ИМ от първата група котвата се премества след подаване на нап-
режение и се освобождава, когато се прекъсне захранването. Основен недос-
татък в този случай е непрекъснатата консумация на енергия. Освен това, при
изчезване на захранването РО сменя положението си.
ИМ с кратковременно импулсно захранване се състоят от два електро-
магнита – главен електромагнит и електромагнит за механизма на ключалката
(фиг. 6).
Фиг. 6. Принципна схема на импулсен електромагнитен ИМ
- 192 -При импулсно захранване чрез бутона SM на главната бобина LM (при
условие, че РО е нормално затворен) котвата 1 се изтегля нагоре. Лостът на
ключалката 2 пропада в канала 3 под действието на пружина 4 и фиксира
котвата. В същия момент чрез контакта на крайния изключвател 1SQ се пре-
късва захранването на бобината LM. Контактът 2SQ се затваря. За връщане на
РО в изходно (затворено) положение е необходимо да се натисне бутонът SK.
Бобината на ключалката LK получава захранване. Създадената електромагнит-
на сила изтегля котвата 2 на ключалката и освобождава котвата 1, която под
действието на пружина 5 се връща в изходно положение. РО се затваря. Кон-
тактът 2SQ се отваря поради това, че планката 6 освобождава крайния из-
ключвател. Бобината LK губи захранване. ИМ е готов за повторно включване.
В САР вместо бутоните SM и SK се свързват контактите от изхода на
двупозиционен регулатор.
Предимството на ИМ с импулсно захранване е това, че консумира малко
енергия и при изчезване на захранването РО не променя своето положение.
Електромагнитните съединители, използвани като ИМ, позволяват да се
повиши бързодействието на системата за регулиране. Чрез тях може да се ре-
гулира скоростта на въртене на ИМ от електродвигателен тип, да се реверсира
или разединява изходният вал, без да се спира двигателя. Съединителите се
поставят между електрическия двигател и РО.
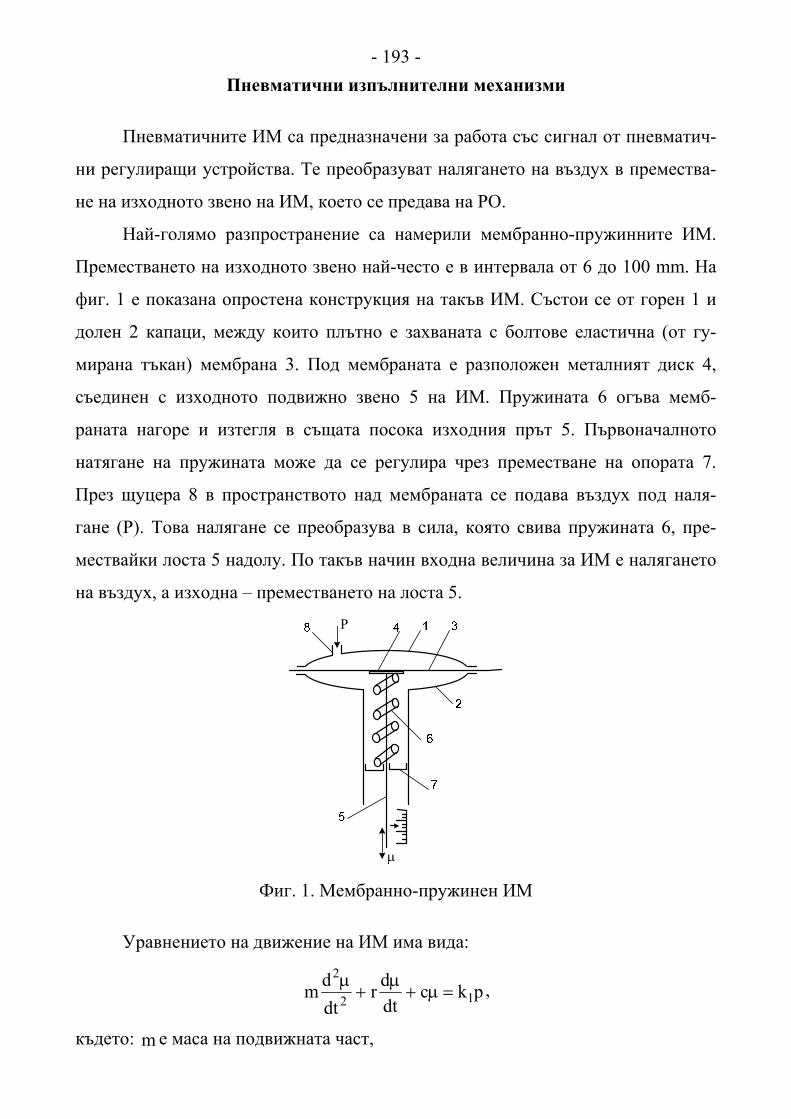
- 193 -Пневматични изпълнителни механизми
Пневматичните ИМ са предназначени за работа със сигнал от пневматич-
ни регулиращи устройства. Те преобразуват налягането на въздух в премества-
не на изходното звено на ИМ, което се предава на РО.
Най-голямо разпространение са намерили мембранно-пружинните ИМ.
Преместването на изходното звено най-често е в интервала от 6 до 100 mm. На
фиг. 1 е показана опростена конструкция на такъв ИМ. Състои се от горен 1 и
долен 2 капаци, между които плътно е захваната с болтове еластична (от гу-
мирана тъкан) мембрана 3. Под мембраната е разположен металният диск 4,
съединен с изходното подвижно звено 5 на ИМ. Пружината 6 огъва мемб-
раната нагоре и изтегля в същата посока изходния прът 5. Първоначалното
натягане на пружината може да се регулира чрез преместване на опората 7.
През щуцера 8 в пространството над мембраната се подава въздух под наля-
гане (Р). Това налягане се преобразува в сила, която свива пружината 6, пре-
мествайки лоста 5 надолу. По такъв начин входна величина за ИМ е налягането
на въздух, а изходна – преместването на лоста 5.
μ
P
Фиг. 1. Мембранно-пружинен ИМ
Уравнението на движение на ИМ има вида:
pkcdtdr
dtdm 12
2=μ+
μ+
μ ,
където: m е маса на подвижната част,
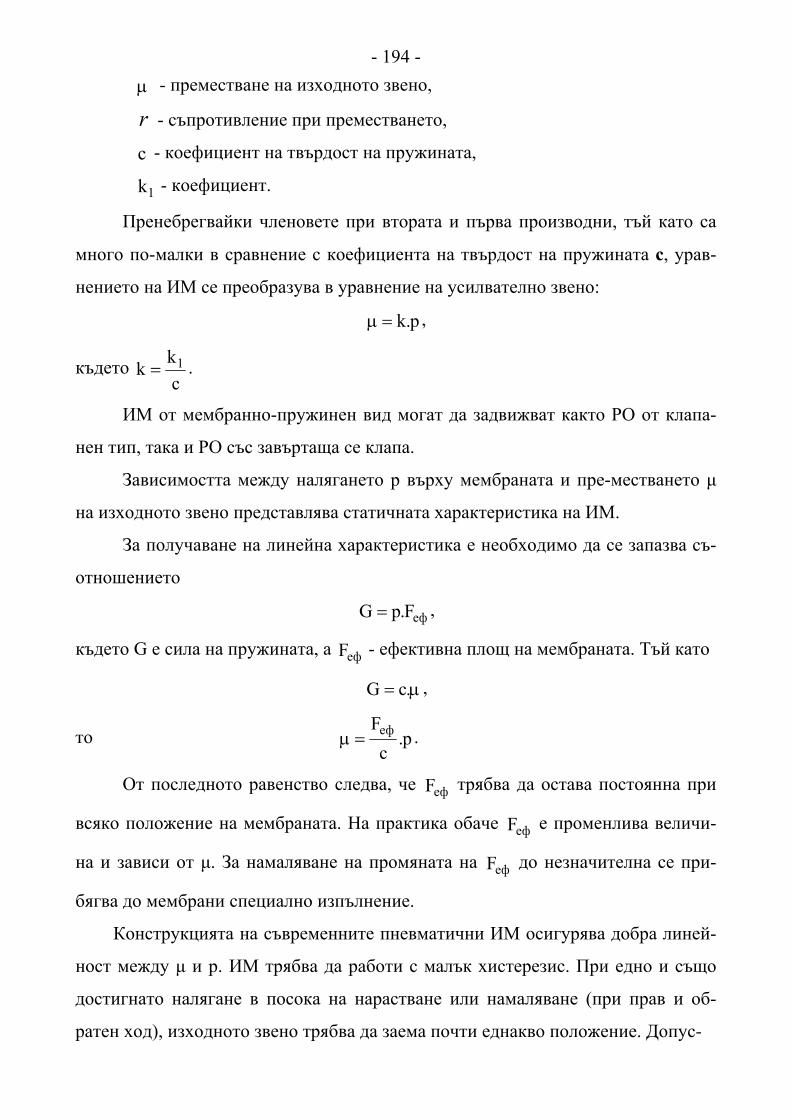
- 194 - μ - преместване на изходното звено,
r - съпротивление при преместването,
с - коефициент на твърдост на пружината,
1k - коефициент.
Пренебрегвайки членовете при втората и първа производни, тъй като са
много по-малки в сравнение с коефициента на твърдост на пружината с, урав-
нението на ИМ се преобразува в уравнение на усилвателно звено:
p.k=μ ,
където ckk 1= .
ИМ от мембранно-пружинен вид могат да задвижват както РО от клапа-
нен тип, така и РО със завъртаща се клапа.
Зависимостта между налягането р върху мембраната и пре-местването μ
на изходното звено представлява статичната характеристика на ИМ.
За получаване на линейна характеристика е необходимо да се запазва съ-
отношението
ефF.pG = ,
където G е сила на пружината, а ефF - ефективна площ на мембраната. Тъй като
μ= .cG ,
то р.с
Fеф=μ .
От последното равенство следва, че ефF трябва да остава постоянна при
всяко положение на мембраната. На практика обаче ефF е променлива величи-
на и зависи от μ. За намаляване на промяната на ефF до незначителна се при-
бягва до мембрани специално изпълнение.
Конструкцията на съвременните пневматични ИМ осигурява добра линей-
ност между μ и р. ИМ трябва да работи с малък хистерезис. При едно и също
достигнато налягане в посока на нарастване или намаляване (при прав и об-
ратен ход), изходното звено трябва да заема почти еднакво положение. Допус-
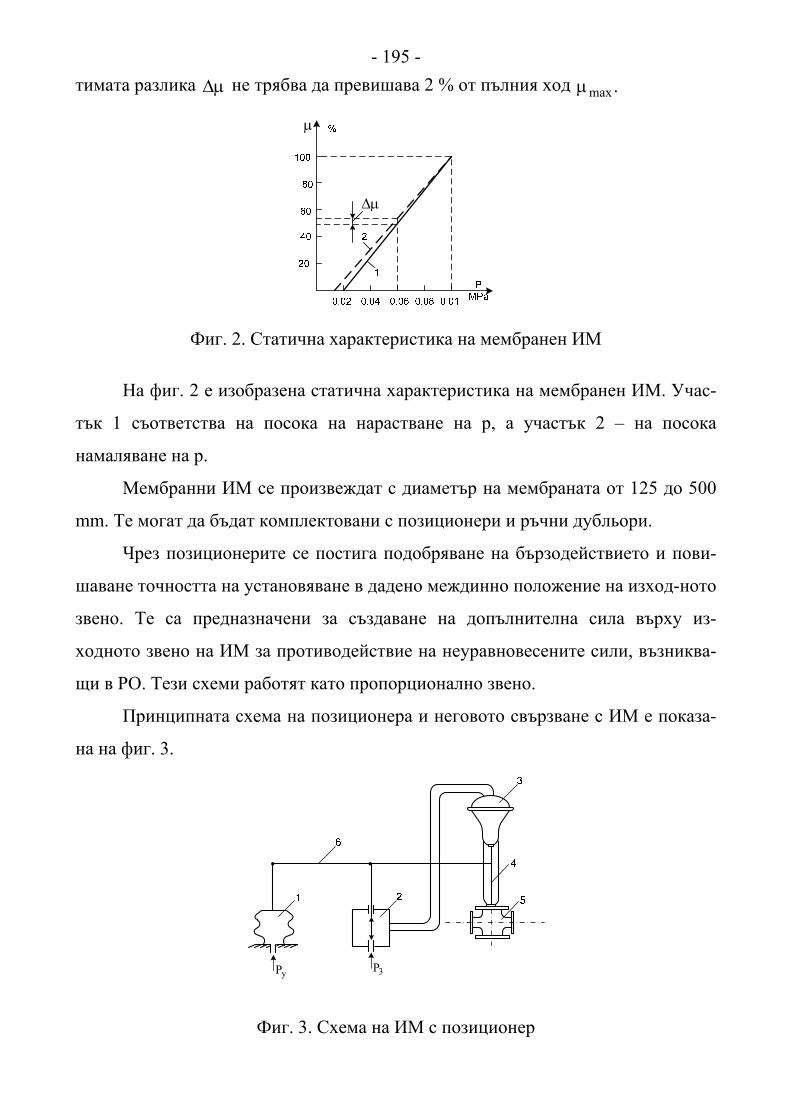
- 195 -тимата разлика μΔ не трябва да превишава 2 % от пълния ход .maxμ
μ
μΔ
Фиг. 2. Статична характеристика на мембранен ИМ
На фиг. 2 е изобразена статична характеристика на мембранен ИМ. Учас-
тък 1 съответства на посока на нарастване на р, а участък 2 – на посока
намаляване на р.
Мембранни ИМ се произвеждат с диаметър на мембраната от 125 до 500
mm. Те могат да бъдат комплектовани с позиционери и ръчни дубльори.
Чрез позиционерите се постига подобряване на бързодействието и пови-
шаване точността на установяване в дадено междинно положение на изход-ното
звено. Те са предназначени за създаване на допълнителна сила върху из-
ходното звено на ИМ за противодействие на неуравновесените сили, възниква-
щи в РО. Тези схеми работят като пропорционално звено.
Принципната схема на позиционера и неговото свързване с ИМ е показа-
на на фиг. 3.
yP 3P
Фиг. 3. Схема на ИМ с позиционер
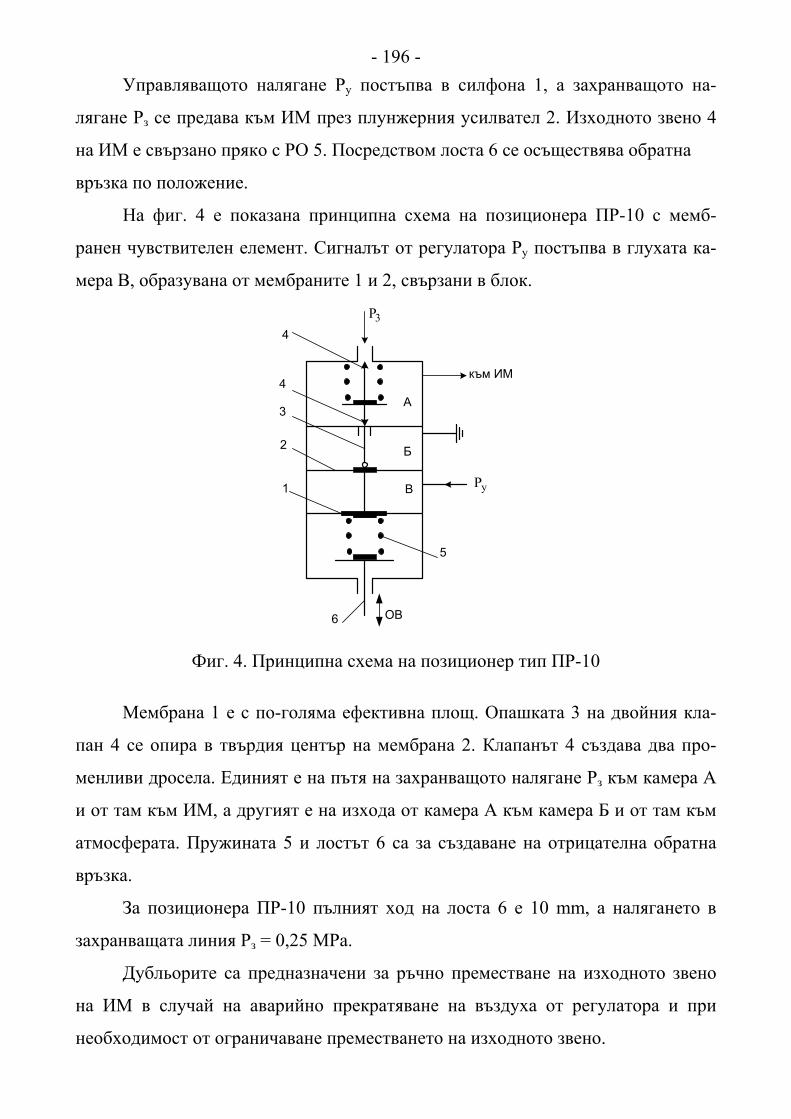
- 196 -Управляващото налягане Ру постъпва в силфона 1, а захранващото на-
лягане Рз се предава към ИМ през плунжерния усилвател 2. Изходното звено 4
на ИМ е свързано пряко с РО 5. Посредством лоста 6 се осъществява обратна
връзка по положение.
На фиг. 4 е показана принципна схема на позиционера ПР-10 с мемб-
ранен чувствителен елемент. Сигналът от регулатора Ру постъпва в глухата ка-
мера В, образувана от мембраните 1 и 2, свързани в блок.
3P
1
2
3
4
4
5
yP
към ИМ
ОВ6
Б
А
В
Фиг. 4. Принципна схема на позиционер тип ПР-10
Мембрана 1 е с по-голяма ефективна площ. Опашката 3 на двойния кла-
пан 4 се опира в твърдия център на мембрана 2. Клапанът 4 създава два про-
менливи дросела. Единият е на пътя на захранващото налягане Рз към камера А
и от там към ИМ, а другият е на изхода от камера А към камера Б и от там към
атмосферата. Пружината 5 и лостът 6 са за създаване на отрицателна обратна
връзка.
За позиционера ПР-10 пълният ход на лоста 6 е 10 mm, а налягането в
захранващата линия Рз = 0,25 МРа.
Дубльорите са предназначени за ръчно преместване на изходното звено
на ИМ в случай на аварийно прекратяване на въздуха от регулатора и при
необходимост от ограничаване преместването на изходното звено.
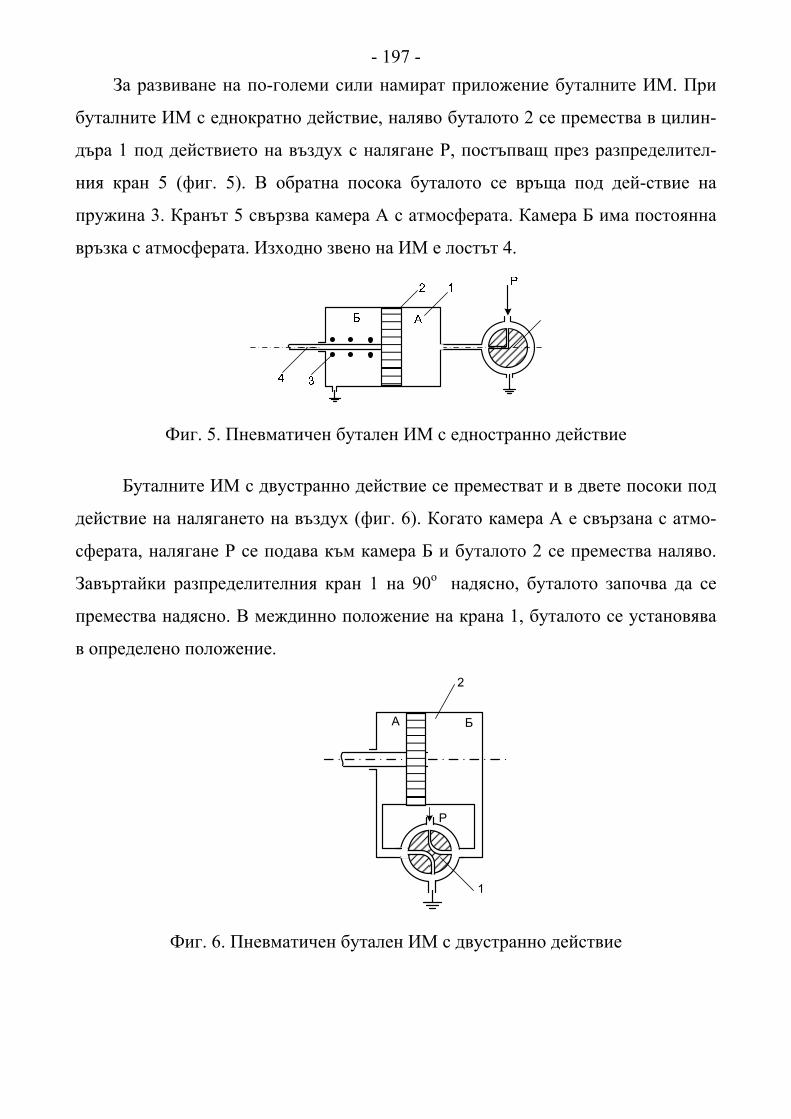
- 197 -За развиване на по-големи сили намират приложение буталните ИМ. При
буталните ИМ с еднократно действие, наляво буталото 2 се премества в цилин-
дъра 1 под действието на въздух с налягане Р, постъпващ през разпределител-
ния кран 5 (фиг. 5). В обратна посока буталото се връща под дей-ствие на
пружина 3. Кранът 5 свързва камера А с атмосферата. Камера Б има постоянна
връзка с атмосферата. Изходно звено на ИМ е лостът 4.
Фиг. 5. Пневматичен бутален ИМ с едностранно действие
Буталните ИМ с двустранно действие се преместват и в двете посоки под
действие на налягането на въздух (фиг. 6). Когато камера А е свързана с атмо-
сферата, налягане Р се подава към камера Б и буталото 2 се премества наляво.
Завъртайки разпределителния кран 1 на 90о надясно, буталото започва да се
премества надясно. В междинно положение на крана 1, буталото се установява
в определено положение.
А Б
1
2
Р
Фиг. 6. Пневматичен бутален ИМ с двустранно действие

- 198 -Хидравлични изпълнителни механизми
Хидравличните изпълнителни механизми (ХИМ) се привеждат в движе-
ние от действието на масло под налягане.
Най-голямо разпространение са получили буталните ХИМ. Бутално-пру-
жинните (фиг. 1) са с едностранно действие, аналогично на буталните пневма-
тични ИМ. Посредством плунжерния разпределител ПР камера А на ИМ или се
свързва с източника на налягане р, или се създава открита връзка за изтичане на
маслото. Този ХИМ е с постъпателно движение на изходното звено.
Фиг. 1. Бутално-пружинен ХИМ
ХИМ с двустранно действие се управлява от двубутален разпределител
(фиг. 8). Буталото на ИМ може да се премества наляво, надясно или да се уста-
новява в дадено положение (както е показано на фигурата). Разликата в наляга-
нията 21 ppp −=Δ определя посоката и скоростта на преместване на буталото
на ИМ.
Фиг. 2. ХИМ с двустранно действие
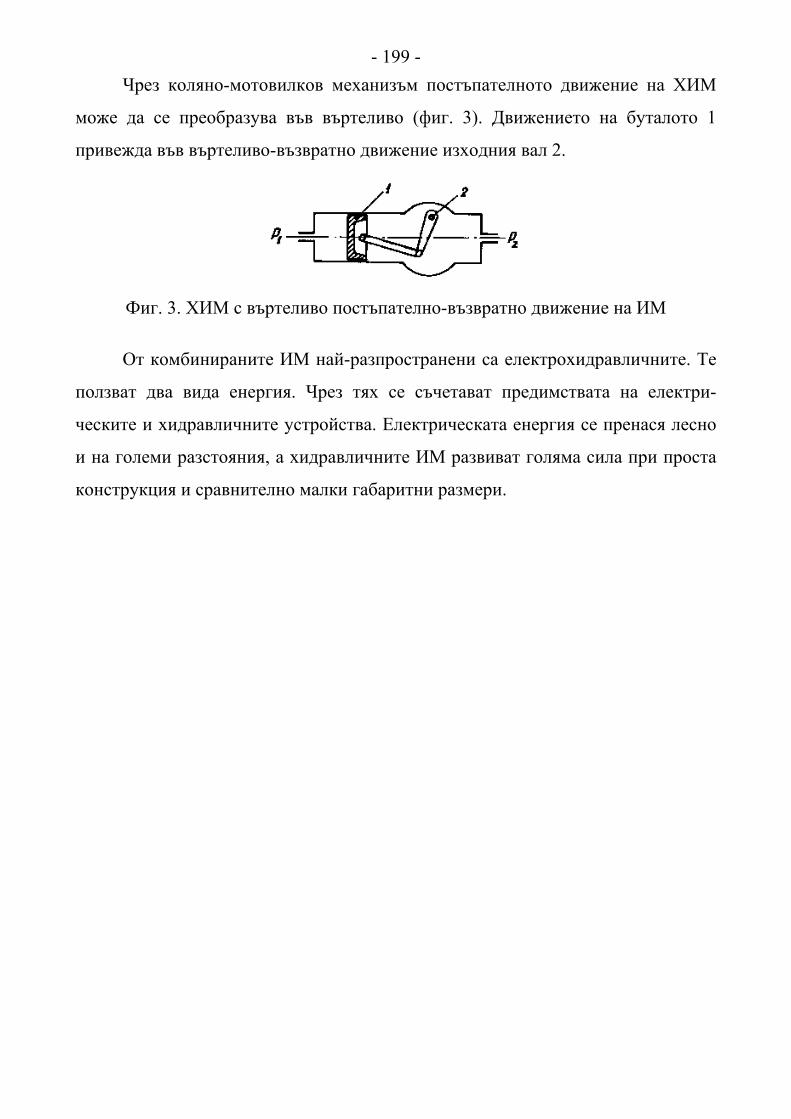
- 199 -Чрез коляно-мотовилков механизъм постъпателното движение на ХИМ
може да се преобразува във въртеливо (фиг. 3). Движението на буталото 1
привежда във въртеливо-възвратно движение изходния вал 2.
Фиг. 3. ХИМ с въртеливо постъпателно-възвратно движение на ИМ
От комбинираните ИМ най-разпространени са електрохидравличните. Те
ползват два вида енергия. Чрез тях се съчетават предимствата на електри-
ческите и хидравличните устройства. Електрическата енергия се пренася лесно
и на големи разстояния, а хидравличните ИМ развиват голяма сила при проста
конструкция и сравнително малки габаритни размери.
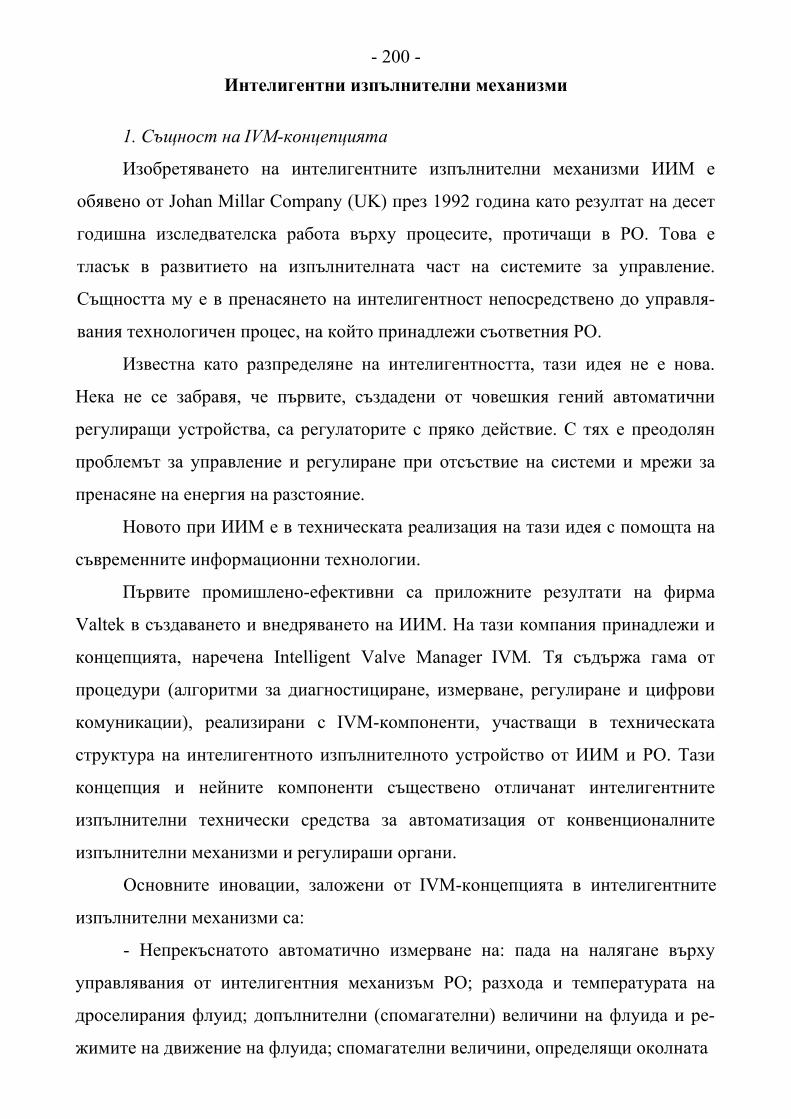
- 200 -Интелигентни изпълнителни механизми
1. Същност на IVM-концепцията
Изобретяването на интелигентните изпълнителни механизми ИИМ е
обявено от Johan Millar Company (UK) през 1992 година като резултат на десет
годишна изследвателска работа върху процесите, протичащи в PO. Това е
тласък в развитието на изпълнителната част на системите за управление.
Същността му е в пренасянето на интелигентност непосредствено до управля-
вания технологичен процес, на който принадлежи съответния PO.
Известна като разпределяне на интелигентността, тази идея не е нова.
Нека не се забравя, че първите, създадени от човешкия гений автоматични
регулиращи устройства, са регулаторите с пряко действие. С тях е преодолян
проблемът за управление и регулиране при отсъствие на системи и мрежи за
пренасяне на енергия на разстояние.
Новото при ИИМ е в техническата реализация на тази идея с помощта на
съвременните информационни технологии.
Първите промишлено-ефективни са приложните резултати на фирма
Valtek в създаването и внедряването на ИИМ. На тази компания принадлежи и
концепцията, наречена Intelligent Valve Manager IVM. Тя съдържа гама от
процедури (алгоритми за диагностициране, измерване, регулиране и цифрови
комуникации), реализирани с IVM-компоненти, участващи в техническата
структура на интелигентното изпълнителното устройство от ИИМ и PO. Тази
концепция и нейните компоненти съществено отличанат интелигентните
изпълнителни технически средства за автоматизация от конвенционалните
изпълнителни механизми и регулираши органи.
Основните иновации, заложени от IVM-концепцията в интелигентните
изпълнителни механизми са:
- Непрекъснатото автоматично измерване на: пада на налягане върху
управлявания от интелигентния механизъм PO; разхода и температурата на
дроселирания флуид; допълнителни (спомагателни) величини на флуида и ре-
жимите на движение на флуида; спомагателни величини, определящи околната
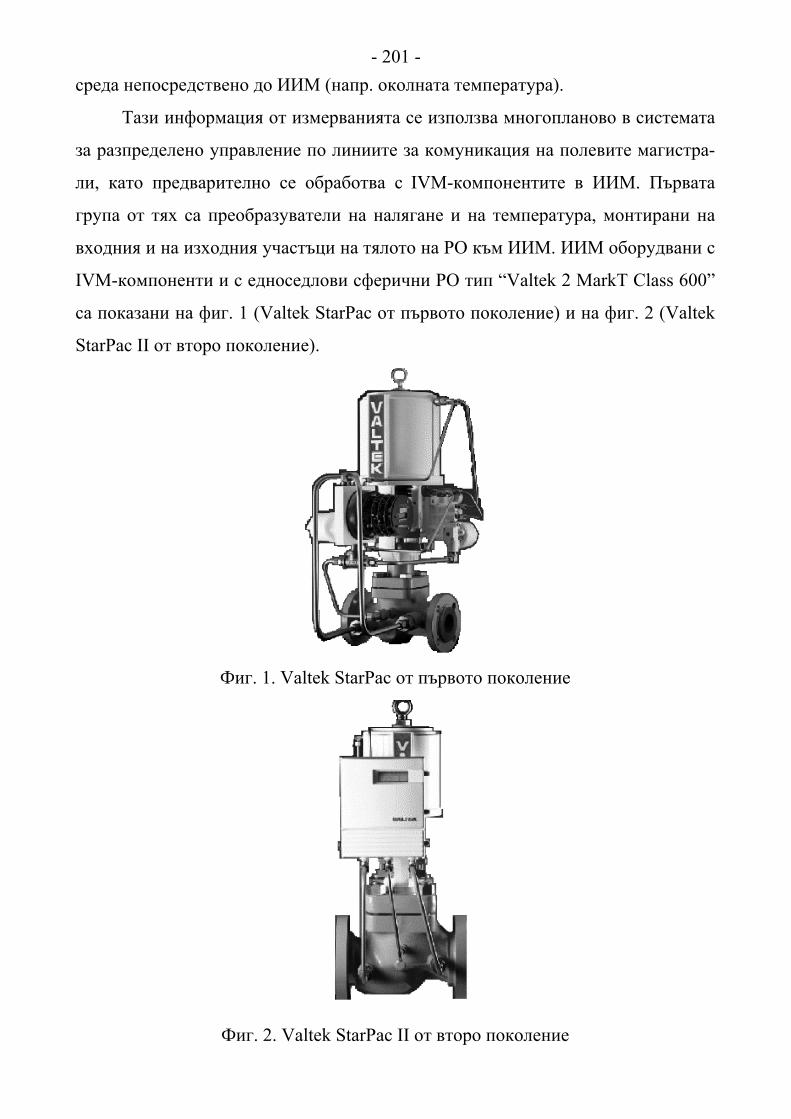
- 201 -среда непосредствено до ИИМ (напр. околната температура).
Тази информация от измерванията се използва многопланово в системата
за разпределено управление по линиите за комуникация на полевите магистра-
ли, като предварително се обработва с IVM-компонентите в ИИМ. Първата
група от тях са преобразуватели на налягане и на температура, монтирани на
входния и на изходния участъци на тялото на PO към ИИМ. ИИМ оборудвани с
IVM-компоненти и с едноседлови сферични PO тип “Valtek 2 MarkT Class 600”
са показани на фиг. 1 (Valtek StarPac от първото поколение) и на фиг. 2 (Valtek
StarPac II от второ поколение).
Фиг. 1. Valtek StarPac от първото поколение
Фиг. 2. Valtek StarPac II от второ поколение

- 202 -- Непрекъснатото автоматично измерване на величини, определящи
режима на функциониране на ИИМ: налягането на върха и на дъното на ИИМ;
захранващото налягане; I/P-преобразувателния изход и др.
Използват се четири вградени IVM първични преобразуватели на ниско
налягане. Заедно с останалите аналогови и цифрови компоненти, те са монти-
рани във взривозащитен сектор от корпуса на PO (фиг. 3, фиг. 4). Измерват на-
лягането на върха и на дъното на ИИМ, налягането на захранващата линия и на
I/P -преобразувателния изход.
Δ
Фиг. 3. Структура на управлението на ИИМ от първо поколение
- Локално базирана микропроцесорна IVM-система за измерване, обра-
ботка на данни, комуникация и интелигентно управление на дроселиращата
система на PO.
Това е стандартна микропроцесорна архитектура в промишлено изпълне-
ние, която съдържа набор основни модификации на ПИД алгоритми и възмож-
ности за дистанционни динамична оптимизация и препрограмиране на други
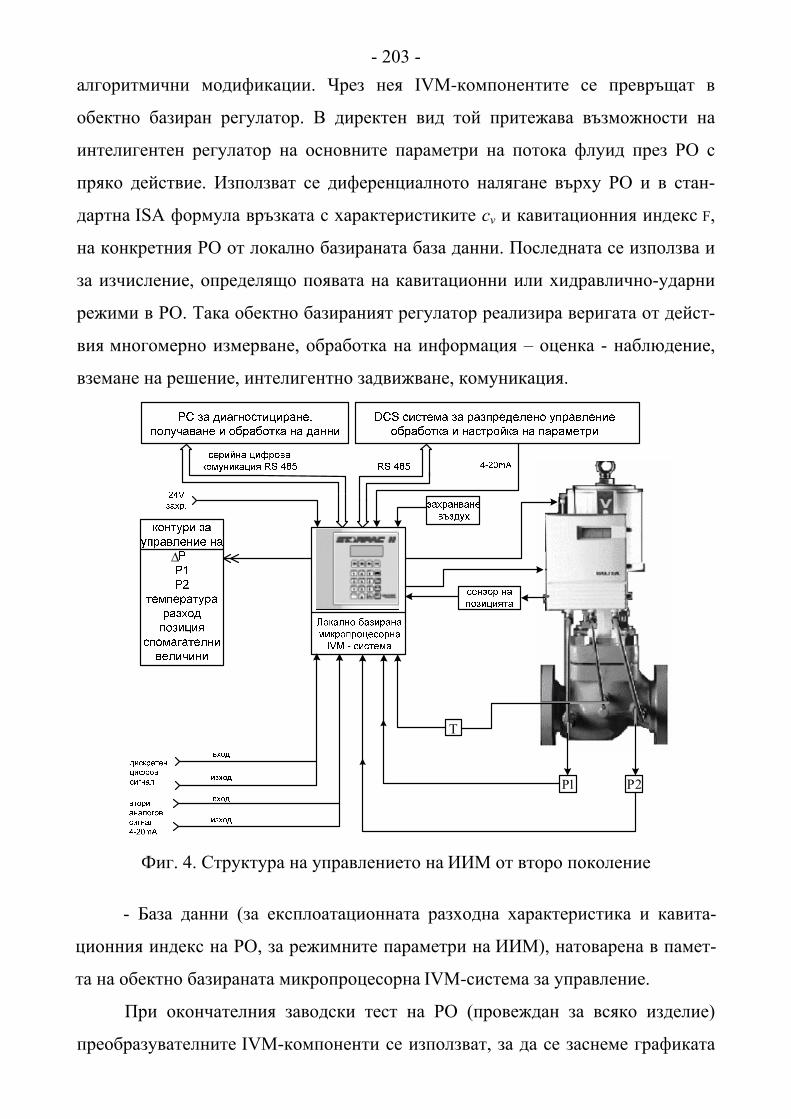
- 203 -алгоритмични модификации. Чрез нея IVM-компонентите се превръщат в
обектно базиран регулатор. В директен вид той притежава възможности на
интелигентен регулатор на основните параметри на потока флуид през PO с
пряко действие. Използват се диференциалното налягане върху PO и в стан-
дартна ISA формула връзката с характеристиките cv и кавитационния индекс F,
на конкретния PO от локално базираната база данни. Последната се използва и
за изчисление, определящо появата на кавитационни или хидравлично-ударни
режими в PO. Така обектно базираният регулатор реализира веригата от дейст-
вия многомерно измерване, обработка на информация – оценка - наблюдение,
вземане на решение, интелигентно задвижване, комуникация.
Δ
1P 2P
T
Фиг. 4. Структура на управлението на ИИМ от второ поколение
- База данни (за експлоатационната разходна характеристика и кавита-
ционния индекс на PO, за режимните параметри на ИИМ), натоварена в памет-
та на обектно базираната микропроцесорна IVM-система за управление.
При окончателния заводски тест на PO (провеждан за всяко изделие)
преобразувателните IVM-компоненти се използват, за да се заснеме графиката
- 204 -на конкретния PO (неговата индивидуална експлоатационна разходна характе-
ристика). Данните се натоварват в постоянната памет на микропроцесорната
IVM-система. Графиката съдържа семейството от вариращи c за всички стой-
ности на позицията на PO от напълно отворен до напълно затворен. Към базата
данни за пропускната способност cv, в паметта се зарежда кавитационния
индекс F, и данни за номиналните режимни параметри на ИИМ.
Така формирана локалната база данни се използва от микропроцесорната
IVM-система, когато ИИМ и PO са в експлоатация и за провеждане оптими-
зационни процедури, алгоритмични корекции и на диагностични оценки.
В окончателен вид концепцията IVM е доведена до стандарта SP_500 за
Digital Fielbus. С него радикално се променя стратегията за регулирането и
управлението на процесите като “придвижва” регулиращата функция чрез ин-
телигентния изпълнителен механизъм и PO непосредствено до обекта за управ-
ление. Стандартът Fielbus е от интегриран тип, чрез който всички устройства
могат да комуникират на три отделни нива - система за регулиране, система за
управление на производството и административна система. Този стандарт оп-
ростява системния инженеринг, закупуването, поддръжката на техническите
средствата за автоматизация. Разработването на SP_500 за Digital Fielbus логич-
но е последвано от появата на т.н. Smart-регулиране. То се състои в:
• обектно базирано ПИД регулиране и/или регулиране с отчитане същест-
вената нестационарност на процесите в PO непосредствено при PO съвместно с
цифрови комуникации обратно и от командната зала за многопланово прило-
жение в режим Multi-user и Multi-Tasking режими на функциониране;
• използване на системи от интелигентно управлявани PO, работещи в
мрежа (мрежови системи) от ИИМ;
• удовлетворяване на изискванията за разпределена интелигентност, пре-
дявявани към техническите средства в системите за разпределено управление
чрез поемане на локални интелигентни функции по вземане на решения и за
комуникация.
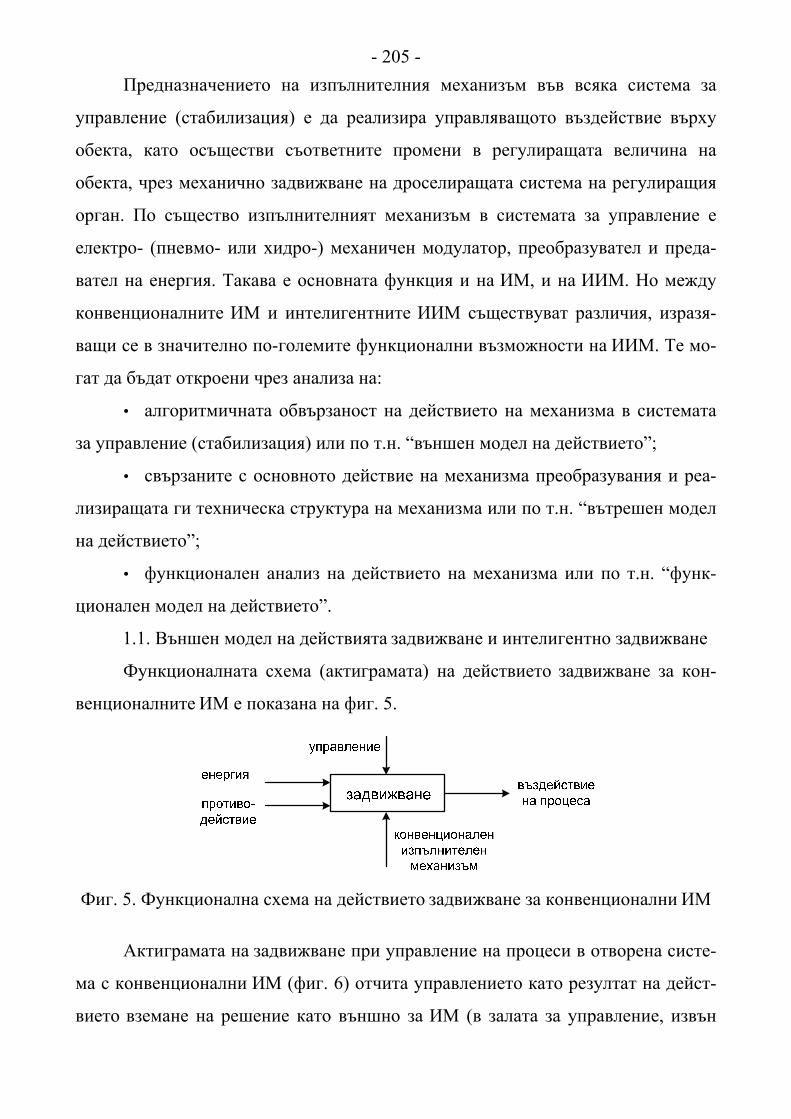
- 205 -Предназначението на изпълнителния механизъм във всяка система за
управление (стабилизация) е да реализира управляващото въздействие върху
обекта, като осъществи съответните промени в регулиращата величина на
обекта, чрез механично задвижване на дроселиращата система на регулиращия
орган. По същество изпълнителният механизъм в системата за управление е
електро- (пневмо- или хидро-) механичен модулатор, преобразувател и преда-
вател на енергия. Такава е основната функция и на ИМ, и на ИИМ. Но между
конвенционалните ИМ и интелигентните ИИМ съществуват различия, изразя-
ващи се в значително по-големите функционални възможности на ИИМ. Те мо-
гат да бъдат откроени чрез анализа на:
• алгоритмичната обвързаност на действието на механизма в системата
за управление (стабилизация) или по т.н. “външен модел на действието”;
• свързаните с основното действие на механизма преобразувания и реа-
лизиращата ги техническа структура на механизма или по т.н. “вътрешен модел
на действието”;
• функционален анализ на действието на механизма или по т.н. “функ-
ционален модел на действието”.
1.1. Външен модел на действията задвижване и интелигентно задвижване
Функционалната схема (актиграмата) на действието задвижване за кон-
венционалните ИМ е показана на фиг. 5.
Фиг. 5. Функционална схема на действието задвижване за конвенционални ИМ
Актиграмата на задвижване при управление на процеси в отворена систе-
ма с конвенционални ИМ (фиг. 6) отчита управлението като резултат на дейст-
вието вземане на решение като външно за ИМ (в залата за управление, извън
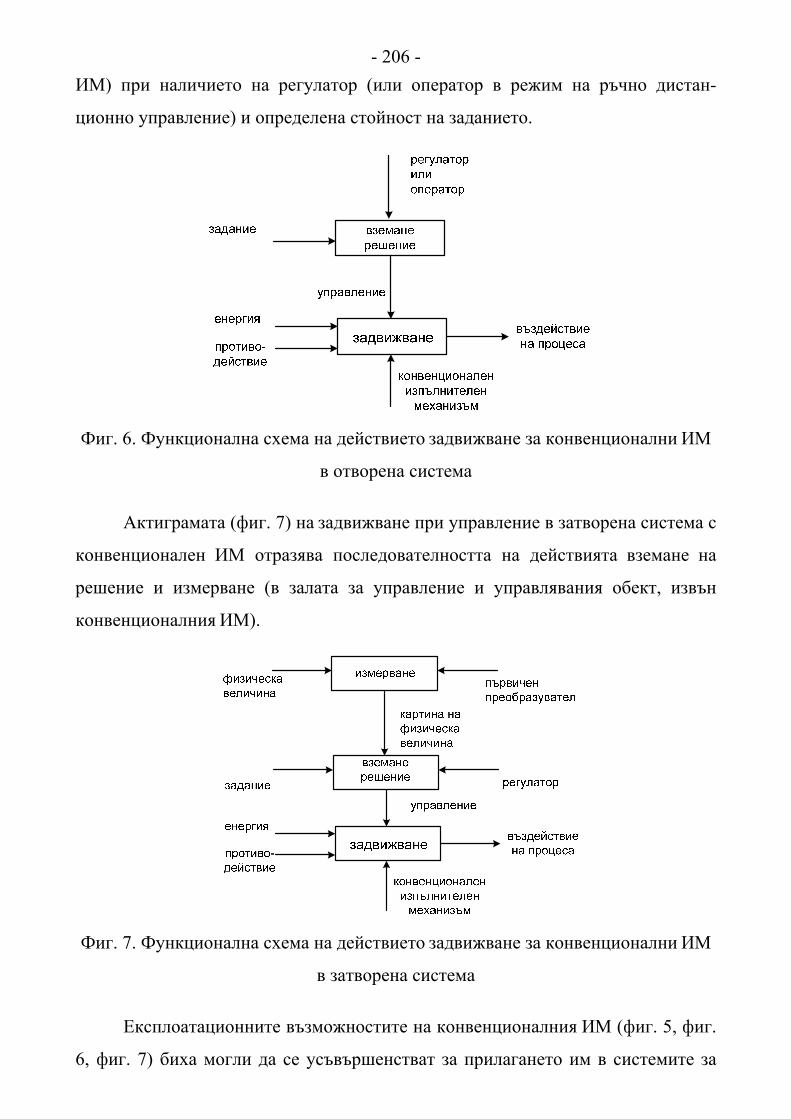
- 206 -ИМ) при наличието на регулатор (или оператор в режим на ръчно дистан-
ционно управление) и определена стойност на заданието.
Фиг. 6. Функционална схема на действието задвижване за конвенционални ИМ
в отворена система
Актиграмата (фиг. 7) на задвижване при управление в затворена система с
конвенционален ИМ отразява последователността на действията вземане на
решение и измерване (в залата за управление и управлявания обект, извън
конвенционалния ИМ).
Фиг. 7. Функционална схема на действието задвижване за конвенционални ИМ
в затворена система
Експлоатационните възможностите на конвенционалния ИМ (фиг. 5, фиг.
6, фиг. 7) биха могли да се усъвършенстват за прилагането им в системите за
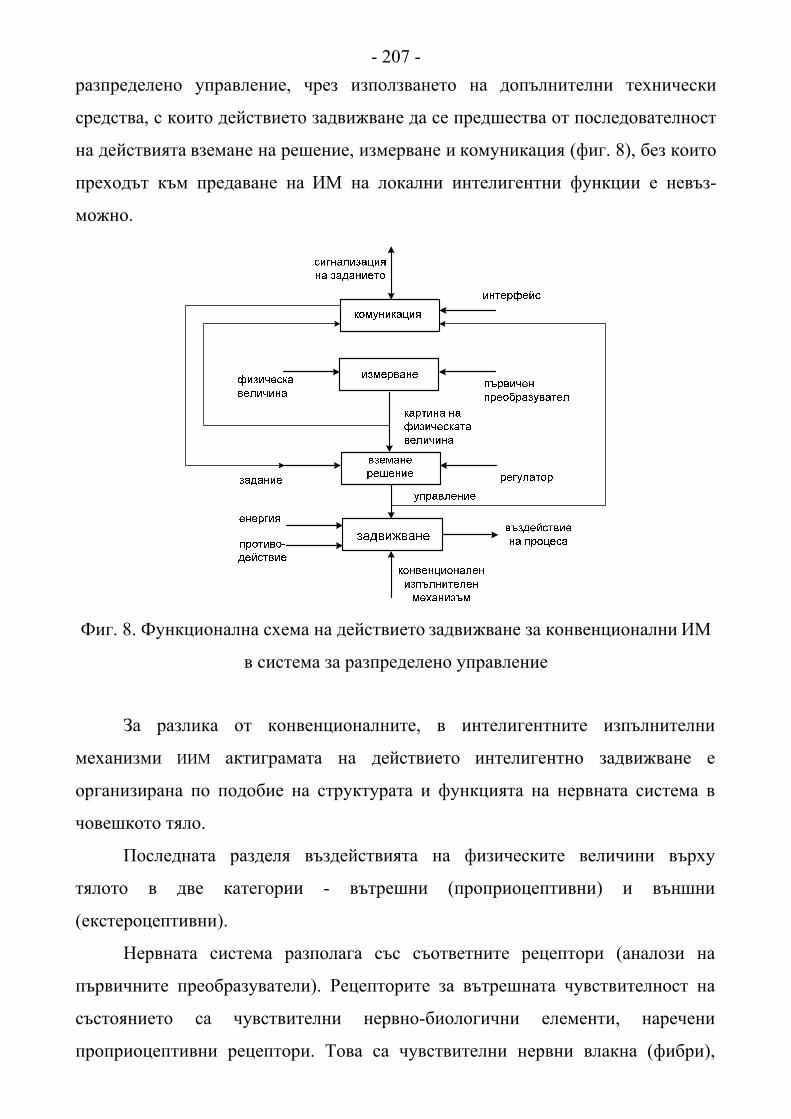
- 207 -разпределено управление, чрез използването на допълнителни технически
средства, с които действието задвижване да се предшества от последователност
на действията вземане на решение, измерване и комуникация (фиг. 8), без които
преходът към предаване на ИМ на локални интелигентни функции е невъз-
можно.
Фиг. 8. Функционална схема на действието задвижване за конвенционални ИМ
в система за разпределено управление
За разлика от конвенционалните, в интелигентните изпълнителни
механизми ИИМ актиграмата на действието интелигентно задвижване е
организирана по подобие на структурата и функцията на нервната система в
човешкото тяло.
Последната разделя въздействията на физическите величини върху
тялото в две категории - вътрешни (проприоцептивни) и външни
(екстероцептивни).
Нервната система разполага със съответните рецептори (аналози на
първичните преобразуватели). Рецепторите за вътрешната чувствителност на
състоянието са чувствителни нервно-биологични елементи, наречени
проприоцептивни рецептори. Това са чувствителни нервни влакна (фибри),
- 208 -насочени към гръбначния мозък на тялото и изкачващи се до главния мозък
чрез снопове и връзки в гръбначния стълб (връзки на Goll и връзки на Burdach)
както и с мозъчни снопове и връзки. Чувствителността за състоянието на
костите на тялото, мускулите и съединяващата ги фиброва тъкан (сухожилията
и ставите или т.н. подвижни костни съединения) е вътрешната чувствителност
на тялото, (proprioception, sensibilite proprioceptive - вътрешна чувствителност за
състоянието на тялото).
Две са състоянията на вътрешната чувствителност:
1. Съзнателна, свързана препредаващо с таламуса (частта от нервните
центрове на главния мозък и на малкия мозък, наречени енцефал) и с
повърхностната обвивка (сива субстанция) на мозъчните полукълба, която ни
осведомява и като ни дава сведения (например за позицията на частите на
тялото ни в пространството), пренасяни чрез нервните връзки и снопове на
гръбначния стълб.
2. Несъзнателна, достигаща до мозъка и проникваща до веригите за
регулиране на групата биологични функции, предизвикващи несъзнателното
движение на тялото (настройващи позите на тялото несъзнателно, обратно и в
противовес на съзнателното движение), провеждащи се от мозъчните нервни
възли.
Екстероцептивни рецептори са сензорите на нервно-епиталната,
периферната, нервна система, сензорите за външната чувствителност на тялото.
Те са разположени в кожата, мембраните и на обвиващата тъкан на органите в
човешкото тяло. Ролята йм е да осезават модификациите на външния свят
(околната среда) и да стимулират ексте- роцептивната чувствителност на
нервните влакна. Екстероцептивна (exteroceptif - външен) е чувствителността,
свързана с получаване на чувството за състоянието на органите в тялото от
съзнанието за всички видове модификации на обвивките на повърхността на
органите (мембрани и др.) на органи от принципна важност в телесната кухина
(сърце, бял дроб, черен дроб, стомах и др., от мускулната и от костно-ставната
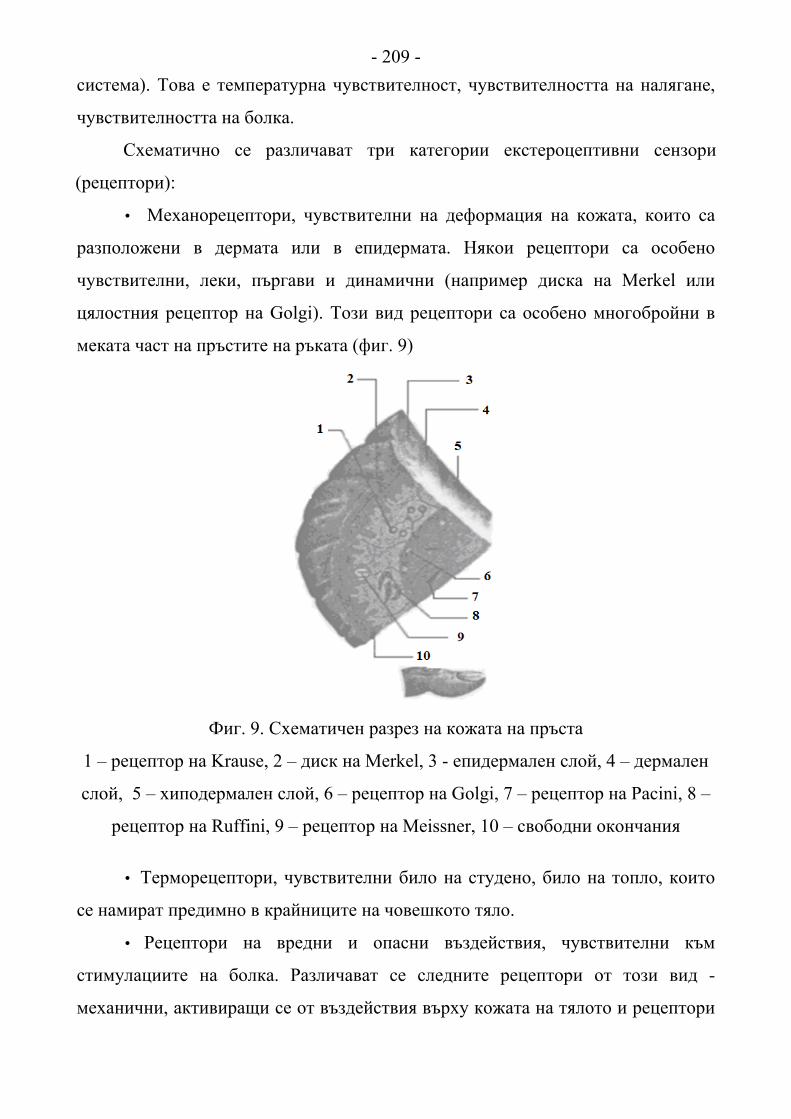
- 209 -система). Това е температурна чувствителност, чувствителността на налягане,
чувствителността на болка.
Схематично се различават три категории екстероцептивни сензори
(рецептори):
• Механорецептори, чувствителни на деформация на кожата, които са
разположени в дермата или в епидермата. Някои рецептори са особено
чувствителни, леки, пъргави и динамични (например диска на Merkel или
цялостния рецептор на Golgi). Този вид рецептори са особено многобройни в
меката част на пръстите на ръката (фиг. 9)
Фиг. 9. Схематичен разрез на кожата на пръста
1 – рецептор на Krause, 2 – диск на Merkel, 3 - епидермален слой, 4 – дермален
слой, 5 – хиподермален слой, 6 – рецептор на Golgi, 7 – рецептор на Pacini, 8 –
рецептор на Ruffini, 9 – рецептор на Meissner, 10 – свободни окончания
• Терморецептори, чувствителни било на студено, било на топло, които
се намират предимно в крайниците на човешкото тяло.
• Рецептори на вредни и опасни въздействия, чувствителни към
стимулациите на болка. Различават се следните рецептори от този вид -
механични, активиращи се от въздействия върху кожата на тялото и рецептори
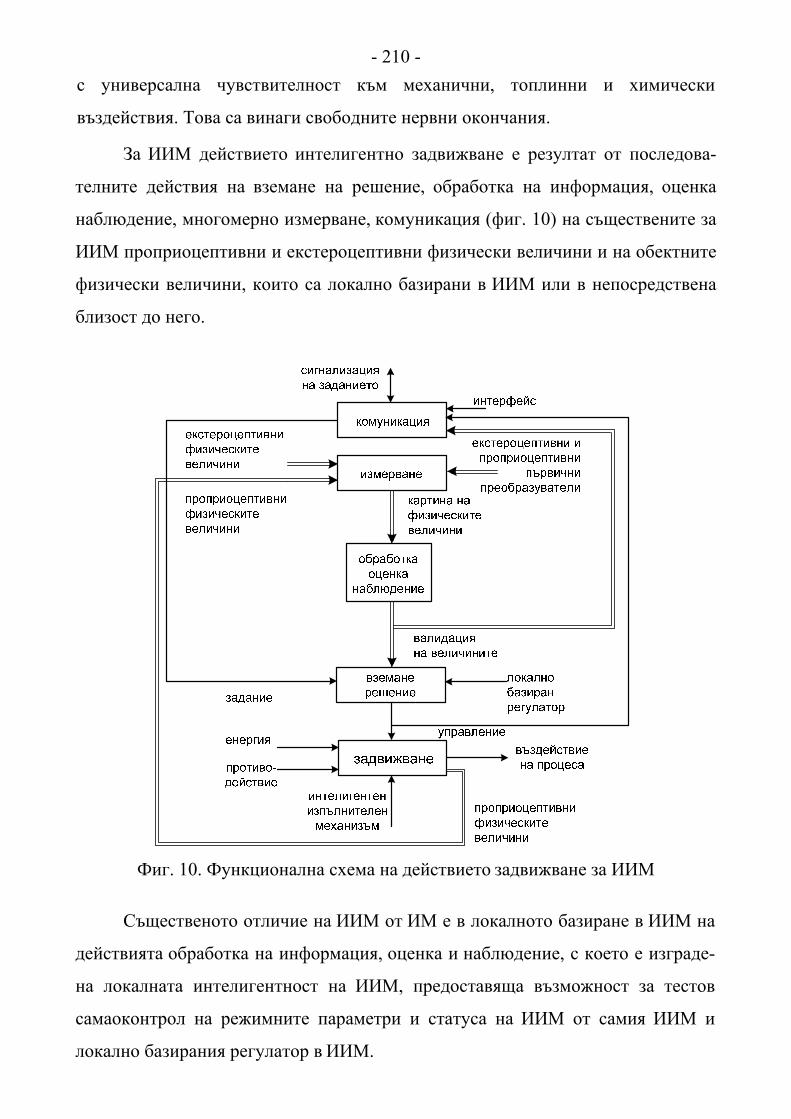
- 210 -с универсална чувствителност към механични, топлинни и химически
въздействия. Това са винаги свободните нервни окончания.
За ИИМ действието интелигентно задвижване е резултат от последова-
телните действия на вземане на решение, обработка на информация, оценка
наблюдение, многомерно измерване, комуникация (фиг. 10) на съществените за
ИИМ проприоцептивни и екстероцептивни физически величини и на обектните
физически величини, които са локално базирани в ИИМ или в непосредствена
близост до него.
Фиг. 10. Функционална схема на действието задвижване за ИИМ
Същественото отличие на ИИМ от ИМ е в локалното базиране в ИИМ на
действията обработка на информация, оценка и наблюдение, с което е изграде-
на локалната интелигентност на ИИМ, предоставяща възможност за тестов
самаоконтрол на режимните параметри и статуса на ИИМ от самия ИИМ и
локално базирания регулатор в ИИМ.
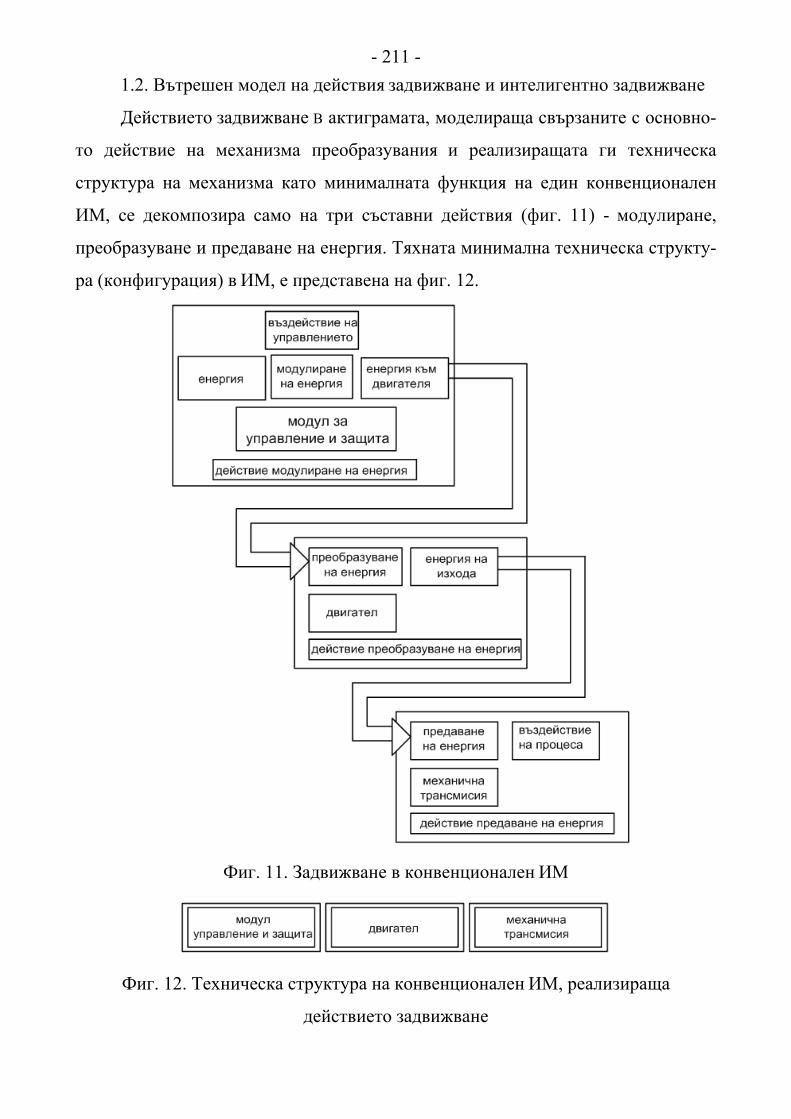
- 211 -1.2. Вътрешен модел на действия задвижване и интелигентно задвижване
Действието задвижване В актиграмата, моделираща свързаните с основно-
то действие на механизма преобразувания и реализиращата ги техническа
структура на механизма като минималната функция на един конвенционален
ИМ, се декомпозира само на три съставни действия (фиг. 11) - модулиране,
преобразуване и предаване на енергия. Тяхната минимална техническа структу-
ра (конфигурация) в ИМ, е представена на фиг. 12.
Фиг. 11. Задвижване в конвенционален ИМ
Фиг. 12. Техническа структура на конвенционален ИМ, реализираща
действието задвижване
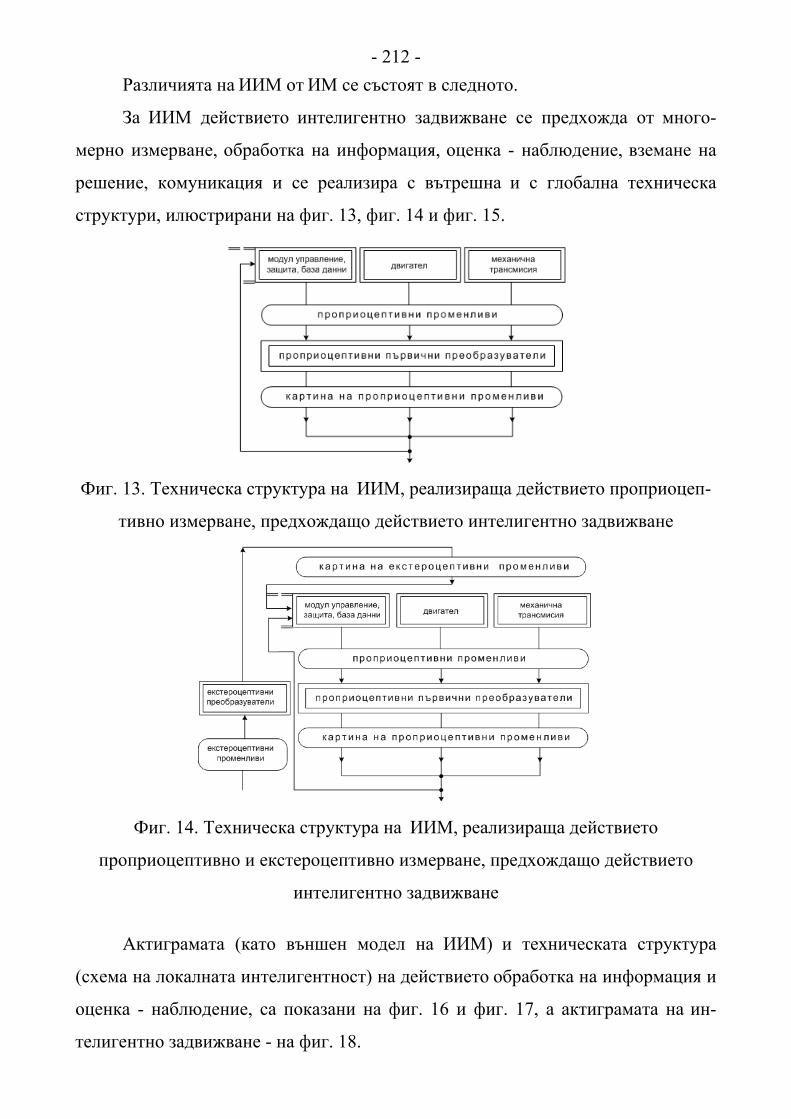
- 212 -Различията на ИИМ от ИМ се състоят в следното.
За ИИМ действието интелигентно задвижване се предхожда от много-
мерно измерване, обработка на информация, оценка - наблюдение, вземане на
решение, комуникация и се реализира с вътрешна и с глобална техническа
структури, илюстрирани на фиг. 13, фиг. 14 и фиг. 15.
Фиг. 13. Техническа структура на ИИМ, реализираща действието проприоцеп-
тивно измерване, предхождащо действието интелигентно задвижване
Фиг. 14. Техническа структура на ИИМ, реализираща действието
проприоцептивно и екстероцептивно измерване, предхождащо действието
интелигентно задвижване
Актиграмата (като външен модел на ИИМ) и техническата структура
(схема на локалната интелигентност) на действието обработка на информация и
оценка - наблюдение, са показани на фиг. 16 и фиг. 17, а актиграмата на ин-
телигентно задвижване - на фиг. 18.
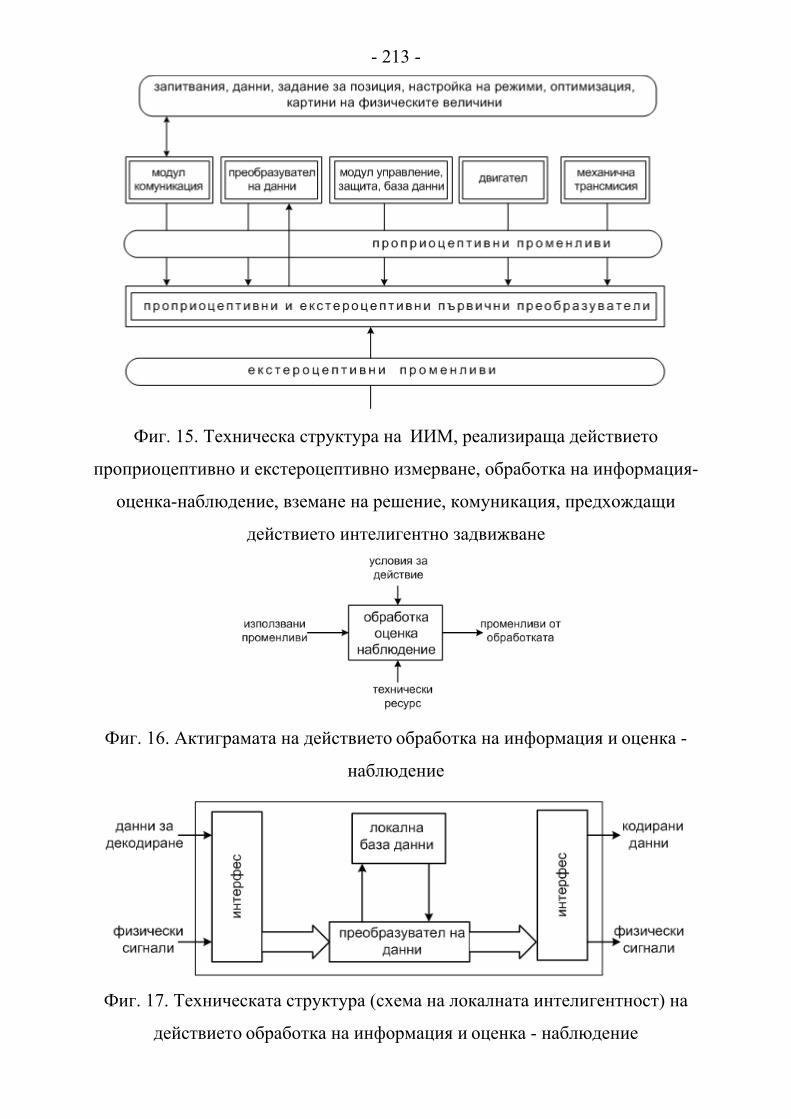
- 213 -
Фиг. 15. Техническа структура на ИИМ, реализираща действието
проприоцептивно и екстероцептивно измерване, обработка на информация-
оценка-наблюдение, вземане на решение, комуникация, предхождащи
действието интелигентно задвижване
Фиг. 16. Актиграмата на действието обработка на информация и оценка -
наблюдение
Фиг. 17. Техническата структура (схема на локалната интелигентност) на
действието обработка на информация и оценка - наблюдение
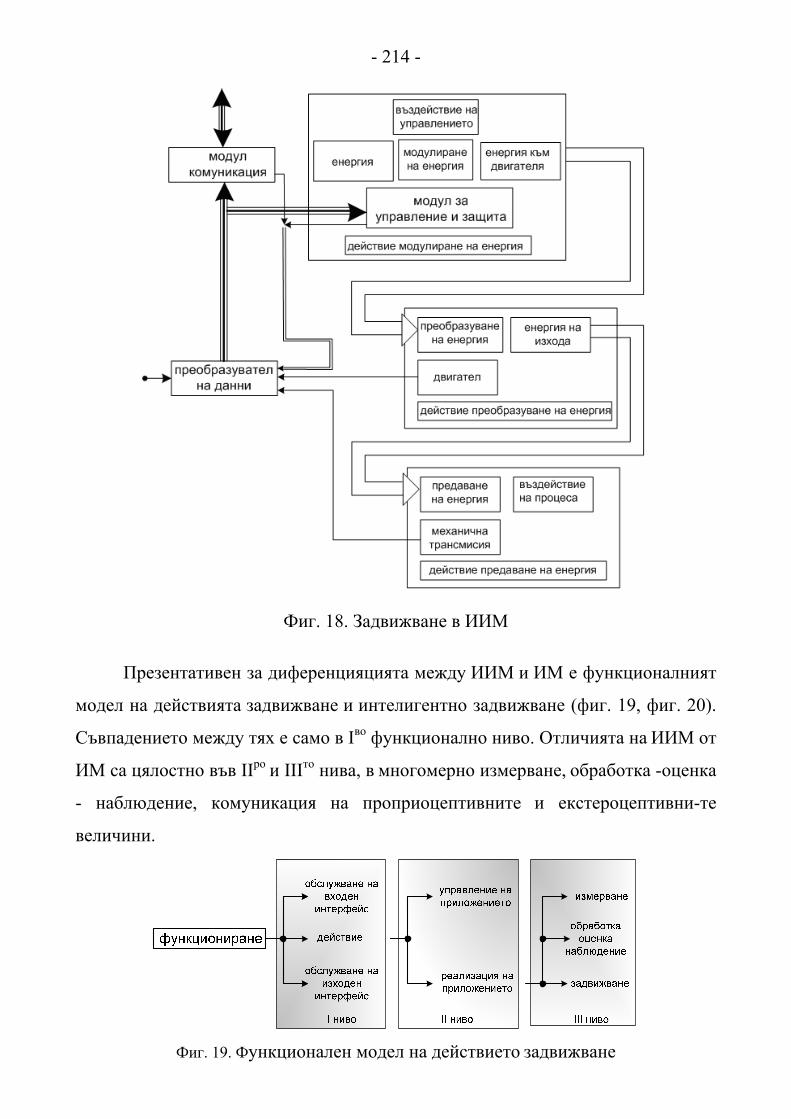
- 214 -
Фиг. 18. Задвижване в ИИМ
Презентативен за диференцияцията между ИИМ и ИМ е функционалният
модел на действията задвижване и интелигентно задвижване (фиг. 19, фиг. 20).
Съвпадението между тях е само в Iво функционално ниво. Отличията на ИИМ от
ИМ са цялостно във IIро и IIIто нива, в многомерно измерване, обработка -оценка
- наблюдение, комуникация на проприоцептивните и екстероцептивни-те
величини.
Фиг. 19. Функционален модел на действието задвижване
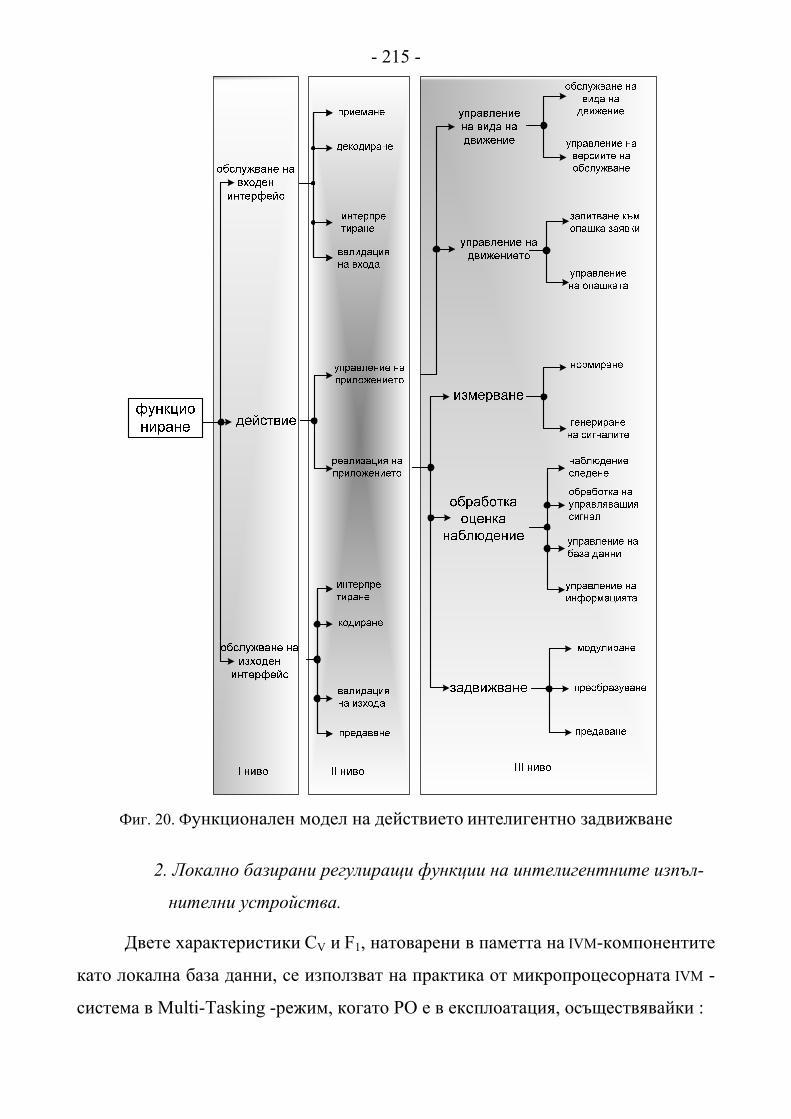
- 215 -
Фиг. 20. Функционален модел на действието интелигентно задвижване
2. Локално базирани регулиращи функции на интелигентните изпъл-
нителни устройства.
Двете характеристики CV и F1, натоварени в паметта на IVM-компонентите
като локална база данни, се използват на практика от микропроцесорната IVM -
система в Multi-Tasking -режим, когато PO е в експлоатация, осъществявайки :
- 216 -• Автоматичен тест и самодиагностика за: настройка на обхват И на нула
на ИИМ; линейност на позиционера; линейност на I/P–преобразувателя; точно
позициониране на PO, заедно с висока скорост на действие чрез използване на
усилвател; теч в цилиндрите на ИИМ; състояние И годност на захранването на
ИИМ; неравности в седлото на PO; усукващо механично натоварване на PO;
термично натоварване на PO; температура на дроселирания флуид И на
околното пространство; появата на кавитационни или хидравлично-ударни
режими в PO чрез изчисление по въведените CV и кавитационния индекс F1 -
характеристики и текущите стойности на величините на режимните показатели
на процеса; алгоритмични инструменти за предсказуемо поддържане И
обслужване на PO и на ИИМ по превантивна поддръжка И предварително-
плановите ремонти.
• Комуникация в системата за разпределено управление - поддържане на
Fielbus комуникация за многопланово приложение в режими Multi-User И Multi-
Tasking ;
• Измерване на параметри на потока (в т.ч. и на разхода) през PO и на
температурата на околната среда;
• Директно регулиране на параметри на потока с:
- локално базиран конвенционален регулатор (предназначен за
стабилизация на обемен или масов разход, пад на налягане, налягане „преди
себе си" или „след себе си");
- каскаден регулатор, използващ „бърза" променлива;
- регулатори с обектна линеаризация на експлоатационната
характеристика на изпълнителната част и привеждане на системата в класа на
параметрически инвариантните с използване на локално базираните: робастна
система, синтезирана по метода на зададено отклонение от номиналната
траектория (с условна обратна връзка); параметрически компенсационна
система, синтезирана по метода на компенсационната променлива; робастна
система с качественият показател, зададен като ограничение върху H¥ - нормата
на нормализираната функция на чувствителност, синтезирана по критерий
- 217 -минимално средно-квадратична грешка H2/H_ (в т.ч. с отчитане на
структурираната параметрична неопределеност) или по процедурата на Morari
и Zafiriou за синтез на m-субоптимален регулатор, или CRONE -робастна
система от непълен ред; локално базирани регулатори с две степени на свобода
или „ R- S- T”- регулатори ; робастен регулатор с две степени на свобода; -
каскаден регулатор с две степени на свобода; инвариантна система от
комбиниран тип; самонастройващ се регулатор; регулатор с еталонен модел.
Всеки един от тези режими на контрол И регулиране за
микропроцесорната IVM - система, може да се стандартизира или като сигнал 4
- 20mA, или с цифрова комуникация от персонален компютър PC, DCS система
за разпределено управление или друг централен компютър, използвайки
структурата на IVM-концепцията. Разработената комуникационна система е
през RS-235 порт с разширен HART-протокол. IVM-модулът може да бъде
използван И като първичен преобразувател за всяка променлива на процеса.
Когато се използва PC, IVM-модулът може да бъде свързан в мрежа с други
IVM-модули.
Софтуерът, позволява четенето И попълването на данните в електронни
таблици (MS EXCEL, LOTUS1-2-3, QUATRO- PRO) И едновременно
онагледяване на съответните характеристики. IVM-компонентите (фиг. 3, фиг.
4), чрез които се реализират основните програмни функции на
микропроцесорната IVM - система. Те са: конфигурационен блок (с функции:
режим, източник на командата, вторичен аналогов канал, действие на въздуха,
управляващо въздействие, ограничения); управляващ блок(с функции: контрол
И управление, стойност на заданието, стойност на променливата, налягане на
входа И на изхода, температура на флуида И на околната среда); изпълнителен
блок (с функции: зададена И действителна позиция на позиционера и разликата
между тях, състояние на крайните изключватели, захранващо налягане,
налягане на върха И на дъното на цилиндъра на ИИМ ).
Безспорен е конструктивният И функционален прогрес в PO на водещите
и известни производители. Конструктивно са решени кавитационните защити И
- 218 -проблемите, свързани с изискванията на новите производствени технологии.
Създаването на интелигентни PO И изпълнителни устройства най-съществено
се отразява в системен аспект. Въвеждането на интелигентност до управляемия
процес допълва всички конструктивни нововъведения И усъвършенствания в
PO, като мултиплицира ефекта от тяхното приложение на практика.
Използването на интелигентните изпълнителни устройства в допълнение
предоставя реални възможности за:
• ефективно приложение на системите за разпределено управление на
нестацио- нарни обекти;
• включване И използване на обектно базирани регулатори с пряко
действие, подобряващи съществено надеждностните показатели на системата;
• многопланово приложение в режими Multi-user И Multi-Tasking на
обектно базирано техническо средство - от първичен преобразувател (на
налягане, пад на налягане, разход, температура, позиция) до цялостен
автоматичен регулатор;
• поддържане и адекватна актуализация на реалната картина на
параметрите на управляемия процес И ефективна идентификация на обекта в
затворен контур;
• създаване на режимни характеристики (по текущите стойности на
показателните за процеса величини), определящи появата на кавитационен или
хидравлично-ударни режими в регулиращите органи и за ефективно управление
на предварително-плановите ремонти;
• линеаризация на характеристиките на PO с използване на натоварената
в IVM - компонентите информация за графика на експлоатационната
характеристика (нелинейността И нееднозначността на PO е функция на
работната точка И на хидродинамичното натоварване на обекта И са основна
причина за флуктуации на параметрите, параметрич- на или структурна
нестационарност на обобщения обект за управление), която може да бъде
постигната структурно чрез препрограмиране по някоя от основните схеми;
- 219 -• решаване на значителната част от проблемите за управление на
квазистационарни обекти с измерими (бавни, квазилинейни или променливи)
параметрични флуктуации, определени от режимни фактори на управляемия
процес;
• достигане до адекватен математически модел на механизма на
проникване И проява на смущаващите въздействия в системата през PO и на
последващата реализация на локално базирани алгоритми на компенсационни
променливи;
• локализиране на източника на неопределеност и мястото, където
възниква тя, т.е. възможности за структурно описание на неопределеността
(свързано с проблема за точност на използвания модел при управление на
обекти с априорна неопределеност, както И при системи за управление с
вътрешен модел на управлявания обект), а от тук И значително по-лекото
преобразуване на модела на неопределеността до стандартна „ М-А „ - структура
И детайлна постановка на проблема за търсене на робастен регулатор при
зададен обект на управление И критерии за качество на синтезираната система
при описана параметрична неопределеност.
Всички тези възможности, предоставени от интелигентната изпълнител-
на част в системите на интелигентните изпълнителни механизми, са реална
перспектива в разработването И в прилагането на качествено нови алгоритми за
управление в антишумово конфигурираните интелигентни системи NRCSS
(Noise Reduced Configurated Smart System).
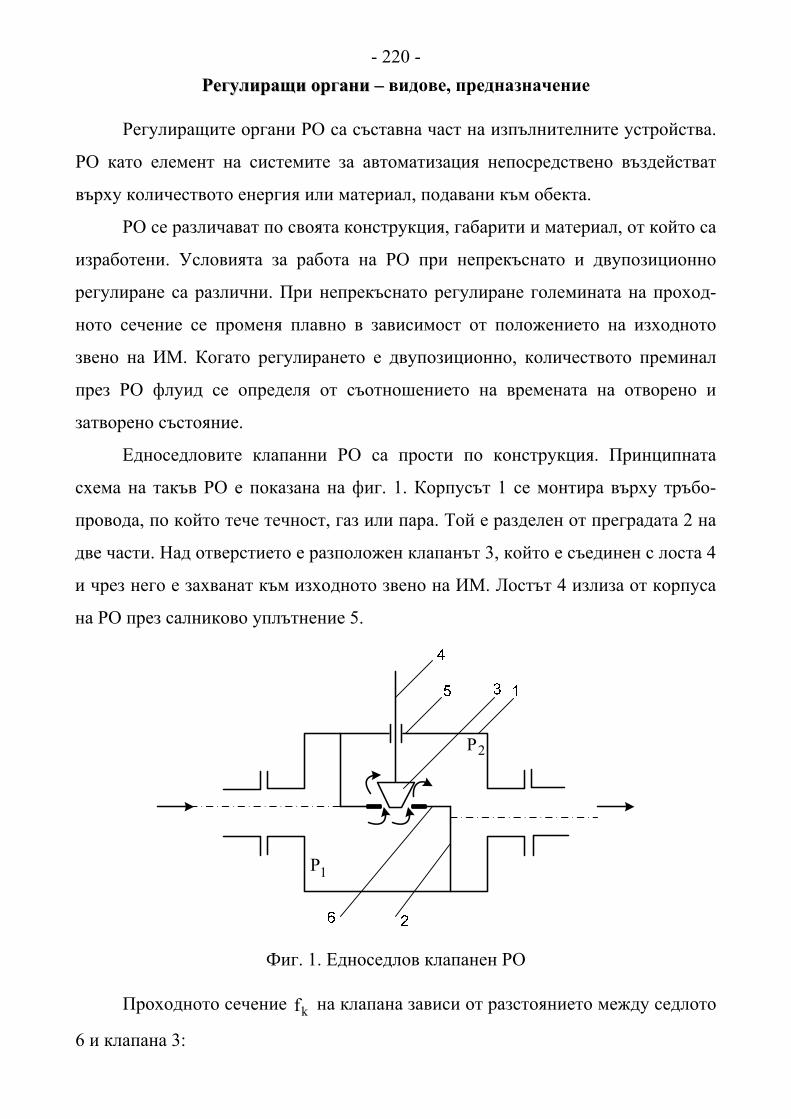
- 220 -РРееггууллиирраащщии ооррггааннии –– видове, предназначение
Регулиращите органи РО са съставна част на изпълнителните устройства.
РО като елемент на системите за автоматизация непосредствено въздействат
върху количеството енергия или материал, подавани към обекта.
РО се различават по своята конструкция, габарити и материал, от който са
изработени. Условията за работа на РО при непрекъснато и двупозиционно
регулиране са различни. При непрекъснато регулиране големината на проход-
ното сечение се променя плавно в зависимост от положението на изходното
звено на ИМ. Когато регулирането е двупозиционно, количеството преминал
през РО флуид се определя от съотношението на времената на отворено и
затворено състояние.
Едноседловите клапанни РО са прости по конструкция. Принципната
схема на такъв РО е показана на фиг. 1. Корпусът 1 се монтира върху тръбо-
провода, по който тече течност, газ или пара. Той е разделен от преградата 2 на
две части. Над отверстието е разположен клапанът 3, който е съединен с лоста 4
и чрез него е захванат към изходното звено на ИМ. Лостът 4 излиза от корпуса
на РО през салниково уплътнение 5.
1Р
2Р
Фиг. 1. Едноседлов клапанен РО
Проходното сечение kf на клапана зависи от разстоянието между седлото
6 и клапана 3:
- 221 -μπ= .d.f ck ,
където cd e вътрешен диаметър на седлото,
μ - преместване на клапата нагоре.
Счита се, че клапанът е напълно отворен, когато проходното сечение kf
стане равно на площта на отвора в седлото 6. Условието за равенството е
4d.
.d.2
cmaxc
π=μπ
или
4dc
max =μ .
От последното равенство следва, че протичащото количество вещество
може да се регулира при изменение на μ от 0 до 4
dc .
При преминаване на течността (газа) през пролуката между седлото и
клапана, тя губи част от своето налягане. Това създава сила, която се стреми да
изтласка клапана 3 и лоста 4 нагоре. Ако клапанът е с голямо сечение, то и
силата става голяма. Затова, при едноседловите клапанни РО диаметърът на
клапана на надвишава 12 ÷ 15 mm. При по-големи диаметри е необходимо ИМ
да развива голяма сила, за да може да задържа РО в определено положение. Ако
налягането спада от 1p до 2p при преминаване на течността (газа) през
проходното сечение, силата N на изтласкване на клапана се определя от урав-
нението:
N= )pp(f 21кл − ,
където клf е площ на клапана.
За уравновесяване на силата N, стандартните РО се изпълняват двусед-
лови (фиг. 2). Те имат два отвора 1 на преградата 3 и два клапана 2. Пълно
уравновесяване не може да се постигне. Това обаче не се отразява значимо на
работата на клапана. Управлението му се осъществява от ИМ с малка мощ-ност.
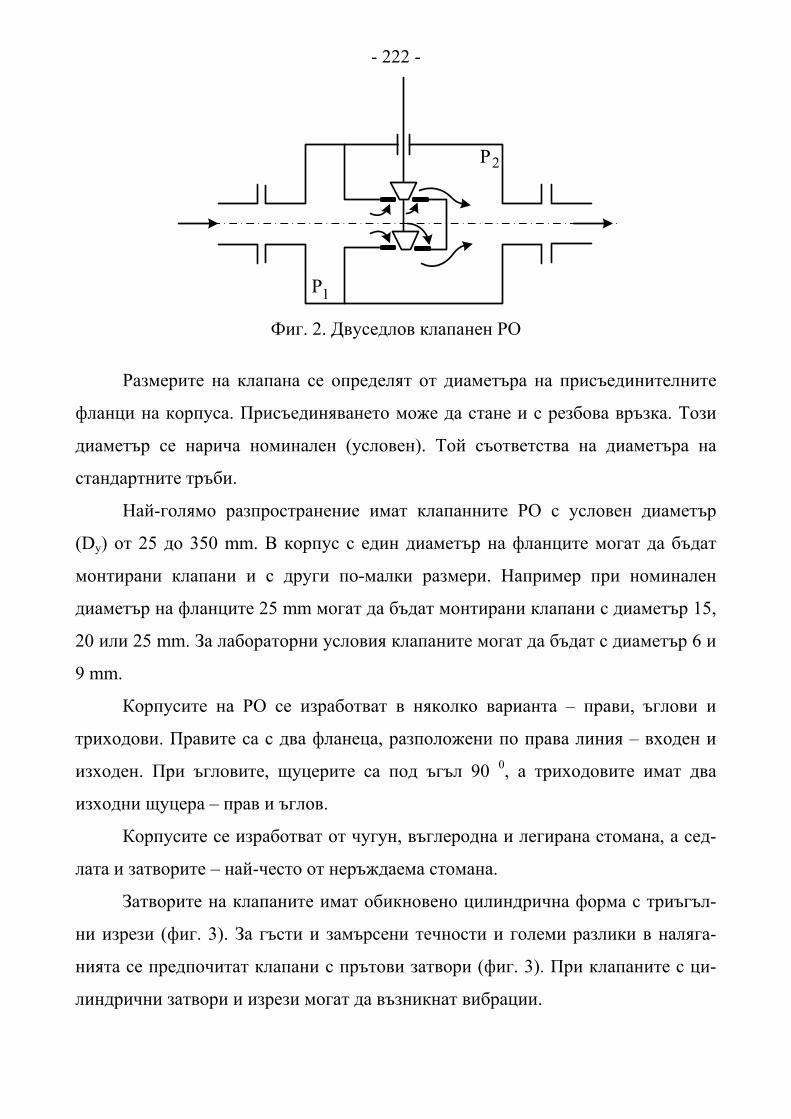
- 222 -
1Р
2Р
Фиг. 2. Двуседлов клапанен РО
Размерите на клапана се определят от диаметъра на присъединителните
фланци на корпуса. Присъединяването може да стане и с резбова връзка. Този
диаметър се нарича номинален (условен). Той съответства на диаметъра на
стандартните тръби.
Най-голямо разпространение имат клапанните РО с условен диаметър
(Dy) от 25 до 350 mm. В корпус с един диаметър на фланците могат да бъдат
монтирани клапани и с други по-малки размери. Например при номинален
диаметър на фланците 25 mm могат да бъдат монтирани клапани с диаметър 15,
20 или 25 mm. За лабораторни условия клапаните могат да бъдат с диаметър 6 и
9 mm.
Корпусите на РО се изработват в няколко варианта – прави, ъглови и
триходови. Правите са с два фланеца, разположени по права линия – входен и
изходен. При ъгловите, щуцерите са под ъгъл 90 0, а триходовите имат два
изходни щуцера – прав и ъглов.
Корпусите се изработват от чугун, въглеродна и легирана стомана, а сед-
лата и затворите – най-често от неръждаема стомана.
Затворите на клапаните имат обикновено цилиндрична форма с триъгъл-
ни изрези (фиг. 3). За гъсти и замърсени течности и големи разлики в наляга-
нията се предпочитат клапани с прътови затвори (фиг. 3). При клапаните с ци-
линдрични затвори и изрези могат да възникнат вибрации.
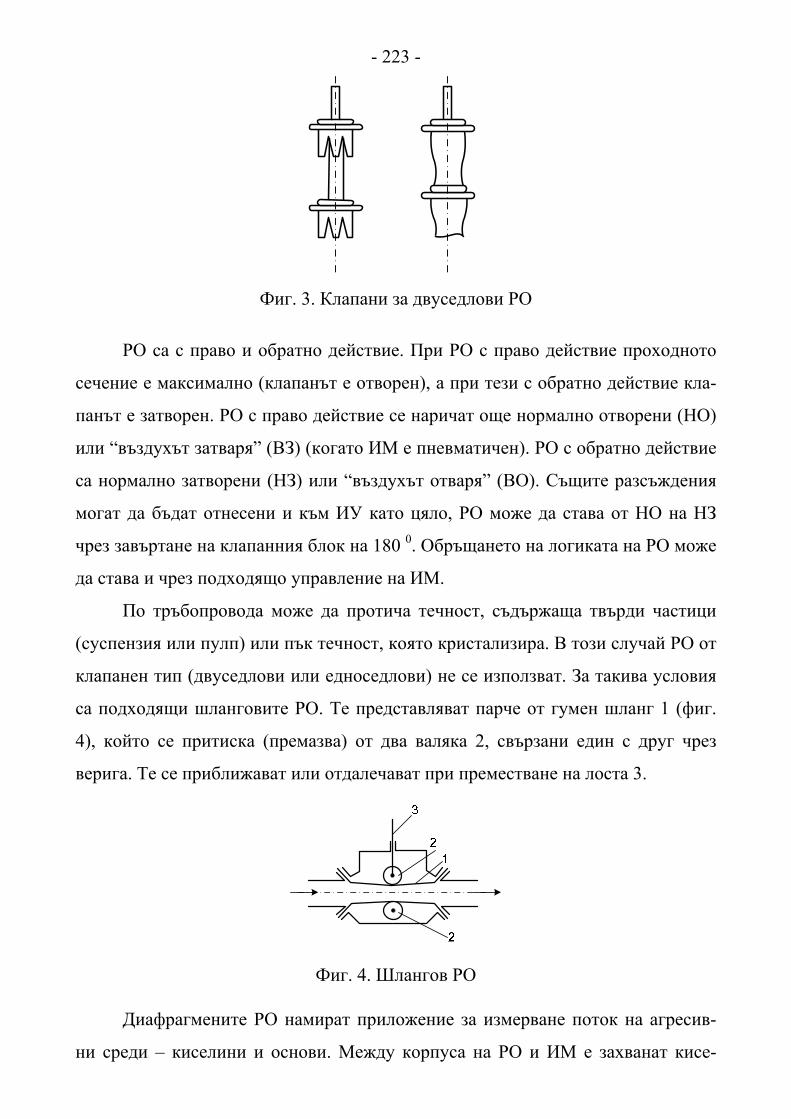
- 223 -
Фиг. 3. Клапани за двуседлови РО
РО са с право и обратно действие. При РО с право действие проходното
сечение е максимално (клапанът е отворен), а при тези с обратно действие кла-
панът е затворен. РО с право действие се наричат още нормално отворени (НО)
или “въздухът затваря” (ВЗ) (когато ИМ е пневматичен). РО с обратно действие
са нормално затворени (НЗ) или “въздухът отваря” (ВО). Същите разсъждения
могат да бъдат отнесени и към ИУ като цяло, РО може да става от НО на НЗ
чрез завъртане на клапанния блок на 180 0. Обръщането на логиката на РО може
да става и чрез подходящо управление на ИМ.
По тръбопровода може да протича течност, съдържаща твърди частици
(суспензия или пулп) или пък течност, която кристализира. В този случай РО от
клапанен тип (двуседлови или едноседлови) не се използват. За такива условия
са подходящи шланговите РО. Те представляват парче от гумен шланг 1 (фиг.
4), който се притиска (премазва) от два валяка 2, свързани един с друг чрез
верига. Те се приближават или отдалечават при преместване на лоста 3.
Фиг. 4. Шлангов РО
Диафрагмените РО намират приложение за измерване поток на агресив-
ни среди – киселини и основи. Между корпуса на РО и ИМ е захванат кисе-
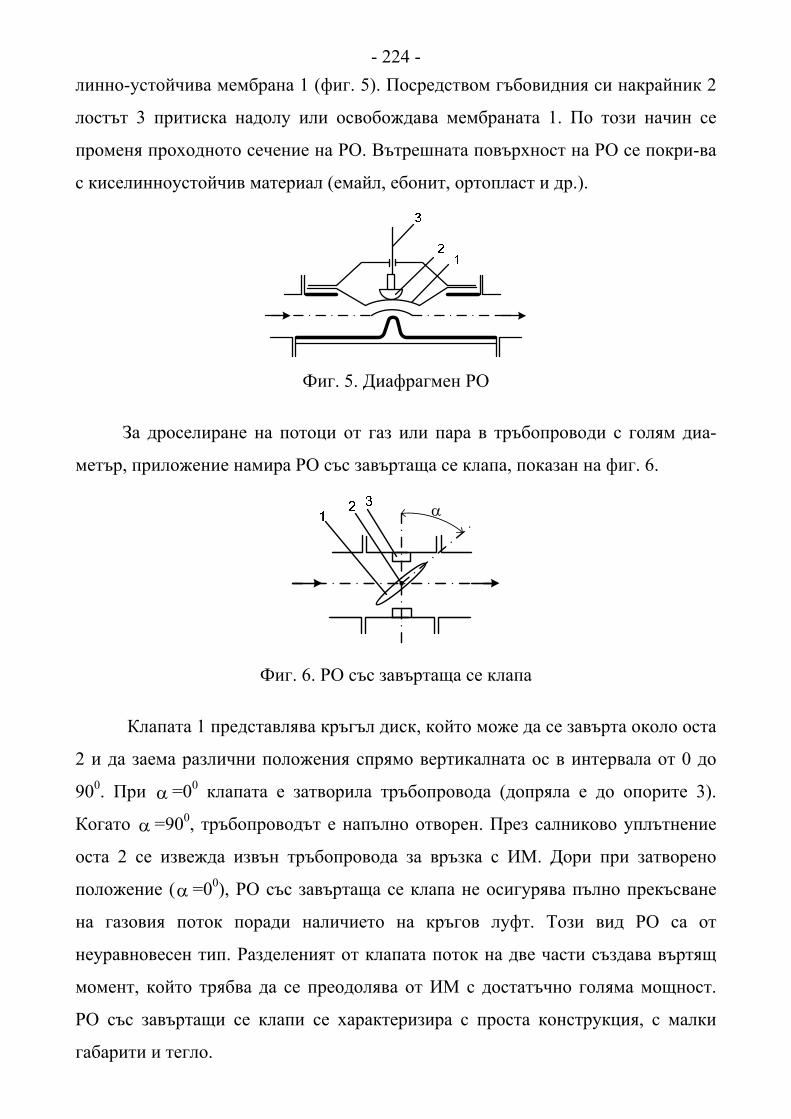
- 224 -линно-устойчива мембрана 1 (фиг. 5). Посредством гъбовидния си накрайник 2
лостът 3 притиска надолу или освобождава мембраната 1. По този начин се
променя проходното сечение на РО. Вътрешната повърхност на РО се покри-ва
с киселинноустойчив материал (емайл, ебонит, ортопласт и др.).
Фиг. 5. Диафрагмен РО
За дроселиране на потоци от газ или пара в тръбопроводи с голям диа-
метър, приложение намира РО със завъртаща се клапа, показан на фиг. 6.
α
Фиг. 6. РО със завъртаща се клапа
Клапата 1 представлява кръгъл диск, който може да се завърта около оста
2 и да заема различни положения спрямо вертикалната ос в интервала от 0 до
900. При α =00 клапата е затворила тръбопровода (допряла е до опорите 3).
Когато α =900, тръбопроводът е напълно отворен. През салниково уплътнение
оста 2 се извежда извън тръбопровода за връзка с ИМ. Дори при затворено
положение (α =00), РО със завъртаща се клапа не осигурява пълно прекъсване
на газовия поток поради наличието на кръгов луфт. Този вид РО са от
неуравновесен тип. Разделеният от клапата поток на две части създава въртящ
момент, който трябва да се преодолява от ИМ с достатъчно голяма мощност.
РО със завъртащи се клапи се характеризира с проста конструкция, с малки
габарити и тегло.
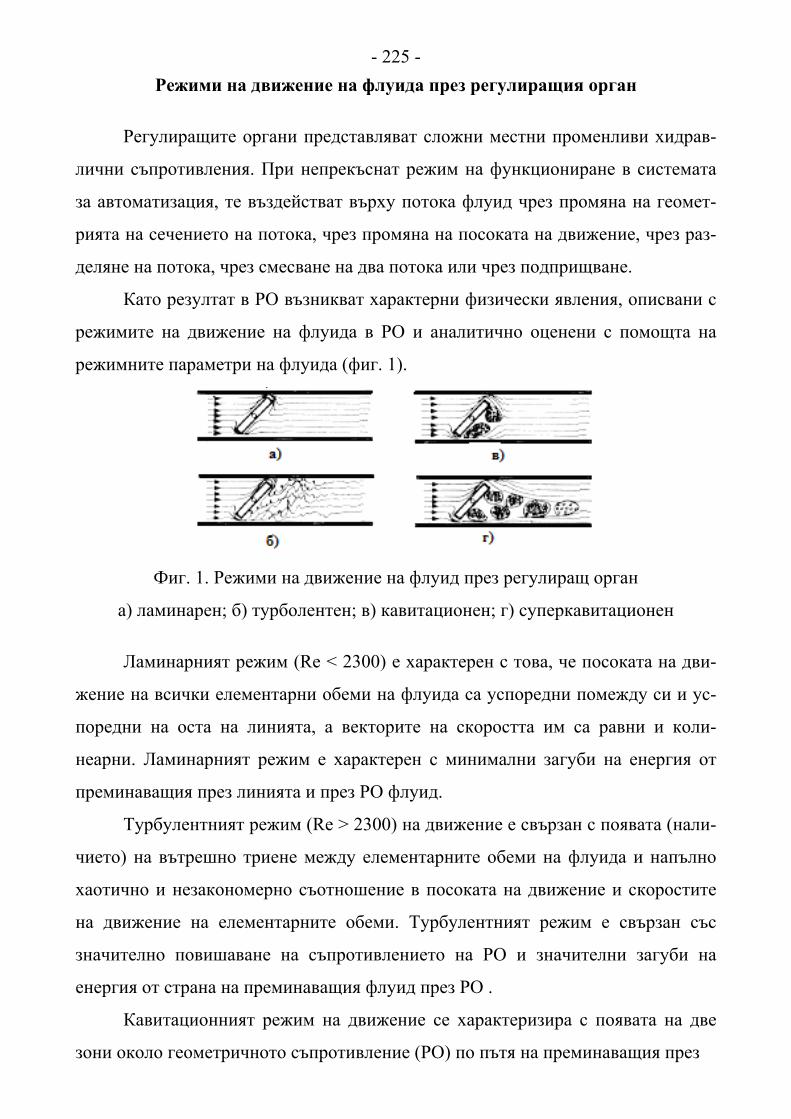
- 225 -Режими на движение на флуида през регулиращия орган
Регулиращите органи представляват сложни местни променливи хидрав-
лични съпротивления. При непрекъснат режим на функциониране в системата
за автоматизация, те въздействат върху потока флуид чрез промяна на геомет-
рията на сечението на потока, чрез промяна на посоката на движение, чрез раз-
деляне на потока, чрез смесване на два потока или чрез подприщване.
Като резултат в PO възникват характерни физически явления, описвани с
режимите на движение на флуида в PO и аналитично оценени с помощта на
режимните параметри на флуида (фиг. 1).
Фиг. 1. Режими на движение на флуид през регулиращ орган
а) ламинарен; б) турболентен; в) кавитационен; г) суперкавитационен
Ламинарният режим (Re < 2300) е характерен с това, че посоката на дви-
жение на всички елементарни обеми на флуида са успоредни помежду си и ус-
поредни на оста на линията, а векторите на скоростта им са равни и коли-
неарни. Ламинарният режим е характерен с минимални загуби на енергия от
преминаващия през линията и през PO флуид.
Турбулентният режим (Re > 2300) на движение е свързан с появата (нали-
чието) на вътрешно триене между елементарните обеми на флуида и напълно
хаотично и незакономерно съотношение в посоката на движение и скоростите
на движение на елементарните обеми. Турбулентният режим е свързан със
значително повишаване на съпротивлението на PO и значителни загуби на
енергия от страна на преминаващия флуид през PO .
Кавитационният режим на движение се характеризира с появата на две
зони около геометричното съпротивление (PO) по пътя на преминаващия през
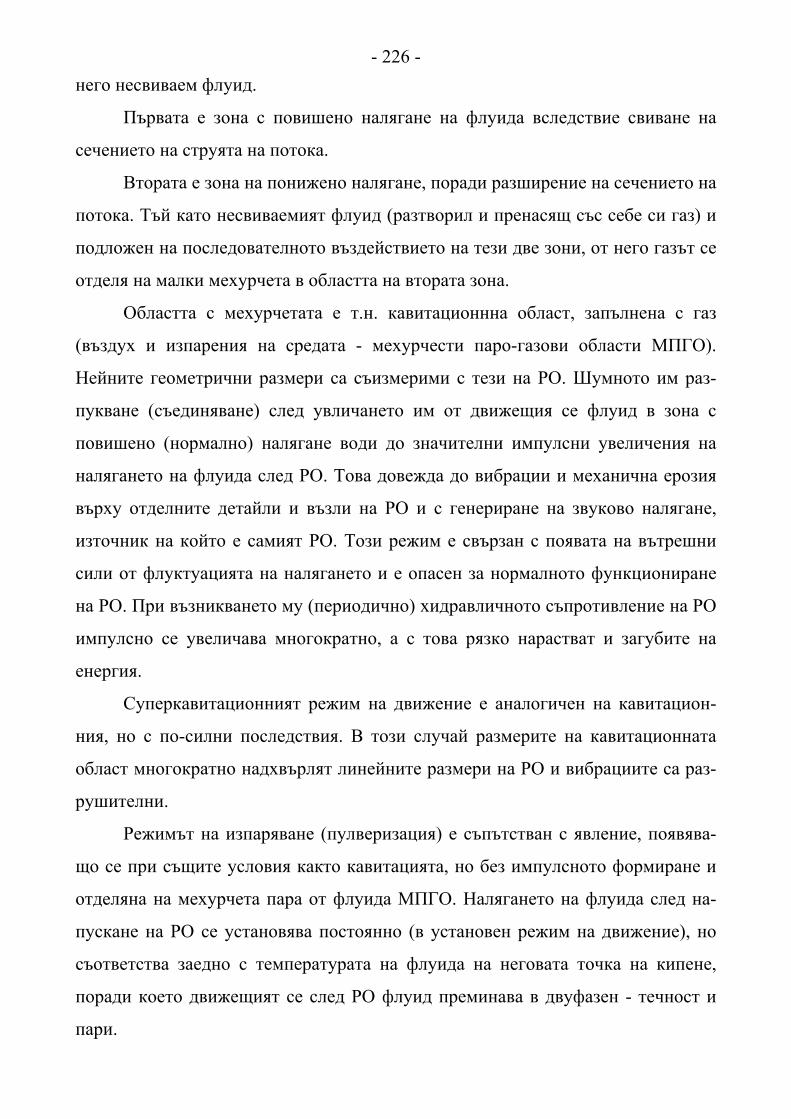
- 226 -него несвиваем флуид.
Първата е зона с повишено налягане на флуида вследствие свиване на
сечението на струята на потока.
Втората е зона на понижено налягане, поради разширение на сечението на
потока. Тъй като несвиваемият флуид (разтворил и пренасящ със себе си газ) и
подложен на последователното въздействието на тези две зони, от него газът се
отделя на малки мехурчета в областта на втората зона.
Областта с мехурчетата е т.н. кавитационнна област, запълнена с газ
(въздух и изпарения на средата - мехурчести паро-газови области МПГО).
Нейните геометрични размери са съизмерими с тези на PO. Шумното им раз-
пукване (съединяване) след увличането им от движещия се флуид в зона с
повишено (нормално) налягане води до значителни импулсни увеличения на
налягането на флуида след PO. Това довежда до вибрации и механична ерозия
върху отделните детайли и възли на PO и с генериране на звуково налягане,
източник на който е самият PO. Този режим е свързан с появата на вътрешни
сили от флуктуацията на налягането и е опасен за нормалното функциониране
на PO. При възникването му (периодично) хидравличното съпротивление на PO
импулсно се увеличава многократно, а с това рязко нарастват и загубите на
енергия.
Суперкавитационният режим на движение е аналогичен на кавитацион-
ния, но с по-силни последствия. В този случай размерите на кавитационната
област многократно надхвърлят линейните размери на PO и вибрациите са раз-
рушителни.
Режимът на изпаряване (пулверизация) е съпътстван с явление, появява-
що се при същите условия както кавитацията, но без импулсното формиране и
отделяна на мехурчета пара от флуида МПГО. Налягането на флуида след на-
пускане на PO се установява постоянно (в установен режим на движение), но
съответства заедно с температурата на флуида на неговата точка на кипене,
поради което движещият се след PO флуид преминава в двуфазен - течност и
пари.
- 227 -Режимът на хидравличния удар е характерен само в случаите на пози-
ционното регулиране (използването на PO с позиционно действие), когато
въздействието на PO върху потока флуид е отсичащо. Като резултат в този вид
PO и в линията може да възникне неустойчиво движение на флуида, характери-
зиращо се с активни колебания на налягането - ударна вълна. Като правило
всичко това се съпровожда с твърде високо ниво на шума и вибрациите от PO.
Прекият хидравличен удар възниква тогава, когато времето за премина-
ване на ударната вълна от PO до захранващия източник и обратно е по-голямо
от времето, необходимо на PO да отсече потока флуид.
Непрекият хидравличен удар възниква при непълно отсичане на потока.
Поради това налягането на флуида не достига до критичната стойност на пре-
кия хидравличен удар.
Показателите на силите на вътрешно триене (Re) и на вътрешно налягане
(Eu); кавитация (к) и на коефициента на кавитация (Kkar) са т.н. "режимни"
параметри на флуида.
- 228 -ХХааррааккттееррииссттииккии ннаа ррееггууллиирраащщииттее ооррггааннии
Най-важните показатели за оценка на РО са:
- условен диаметър,
- пропускателна способност,
- конструктивна характеристика,
- разходна характеристика.
Условният диаметър Dy (mm), това е вътрешният диаметър на сечението в
мястото на присъединяване на РО към тръбопровода.
Условната пропускателна способност Kvy се определя чрез условния
диаметър Dy и коефициента α , зависещ от вида на РО:
Кvy= 2уD.α .
За различните видове РО коефициентът α приема различни стойности:
- за едноседлови и диафрагмени РО α =0,012;
- за двуседлови клапанни РО α =0,016;
- за РО със завъртащи се клапи α =0,02;
- за шлангови РО α =0,05.
Условната пропускателна способност Kvy представлява номиналният
разход (m3/h) на течност с плътност 1000 kg/m3 през РО при нормални усло-вия.
Течността протича при отворен РО и пад на налягане върху него 0,1 MРa.
Конструктивната характеристика на РО представлява зависимостта между
площта на проходното сечение f и положението на затвора μ или ϕ (μ е ли-
нейно преместване на затвора, а ϕ - ъгъл на завъртане).
)(f μψ= ,
или )(f ϕψ= .
За РО със завъртащи се клапи втората зависимост има следния конкретен
вид:
)cos1.(D..5,0f 2у ϕ−π= .
Вижда се, че характеристиката е нелинейна.
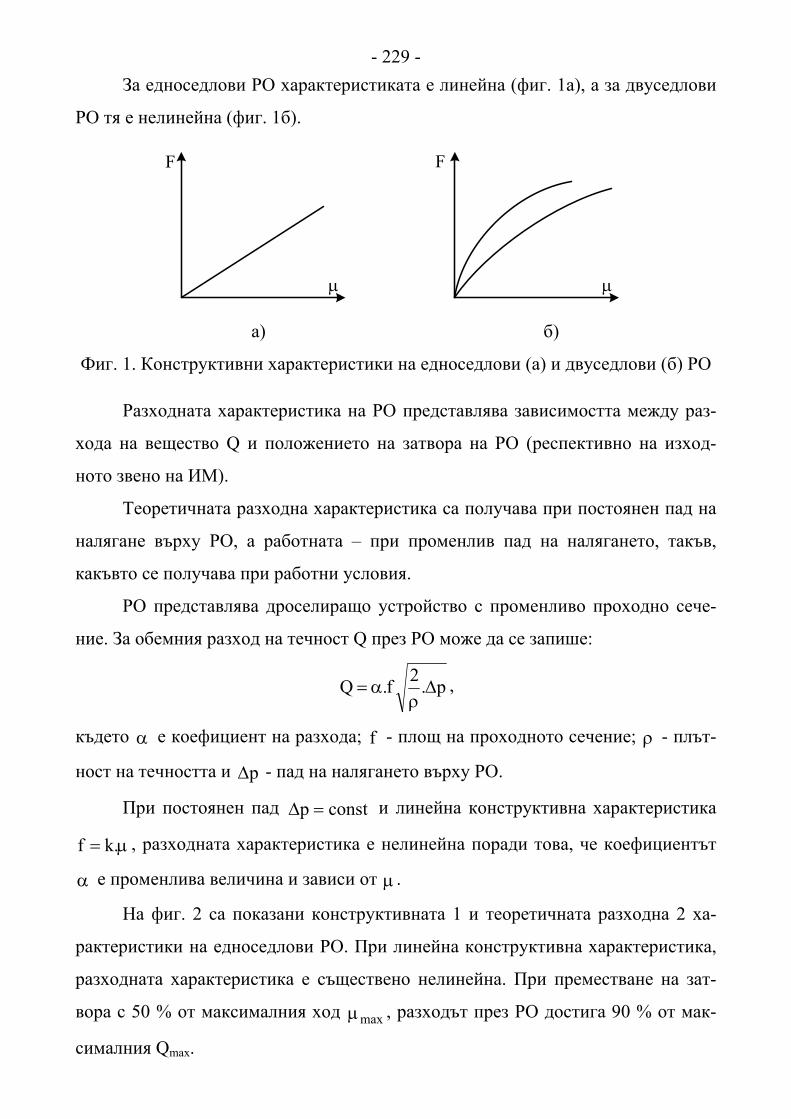
- 229 -За едноседлови РО характеристиката е линейна (фиг. 1а), а за двуседлови
РО тя е нелинейна (фиг. 1б).
μμ
F F
а) б)
Фиг. 1. Конструктивни характеристики на едноседлови (а) и двуседлови (б) РО
Разходната характеристика на РО представлява зависимостта между раз-
хода на вещество Q и положението на затвора на РО (респективно на изход-
ното звено на ИМ).
Теоретичната разходна характеристика са получава при постоянен пад на
налягане върху РО, а работната – при променлив пад на налягането, такъв,
какъвто се получава при работни условия.
РО представлява дроселиращо устройство с променливо проходно сече-
ние. За обемния разход на течност Q през РО може да се запише:
p.2f.Q Δρ
α= ,
където α е коефициент на разхода; f - площ на проходното сечение; ρ - плът-
ност на течността и pΔ - пад на налягането върху РО.
При постоянен пад constp =Δ и линейна конструктивна характеристика
μ= .kf , разходната характеристика е нелинейна поради това, че коефициентът
α е променлива величина и зависи от μ .
На фиг. 2 са показани конструктивната 1 и теоретичната разходна 2 ха-
рактеристики на едноседлови РО. При линейна конструктивна характеристика,
разходната характеристика е съществено нелинейна. При преместване на зат-
вора с 50 % от максималния ход maxμ , разходът през РО достига 90 % от мак-
сималния Qmax.
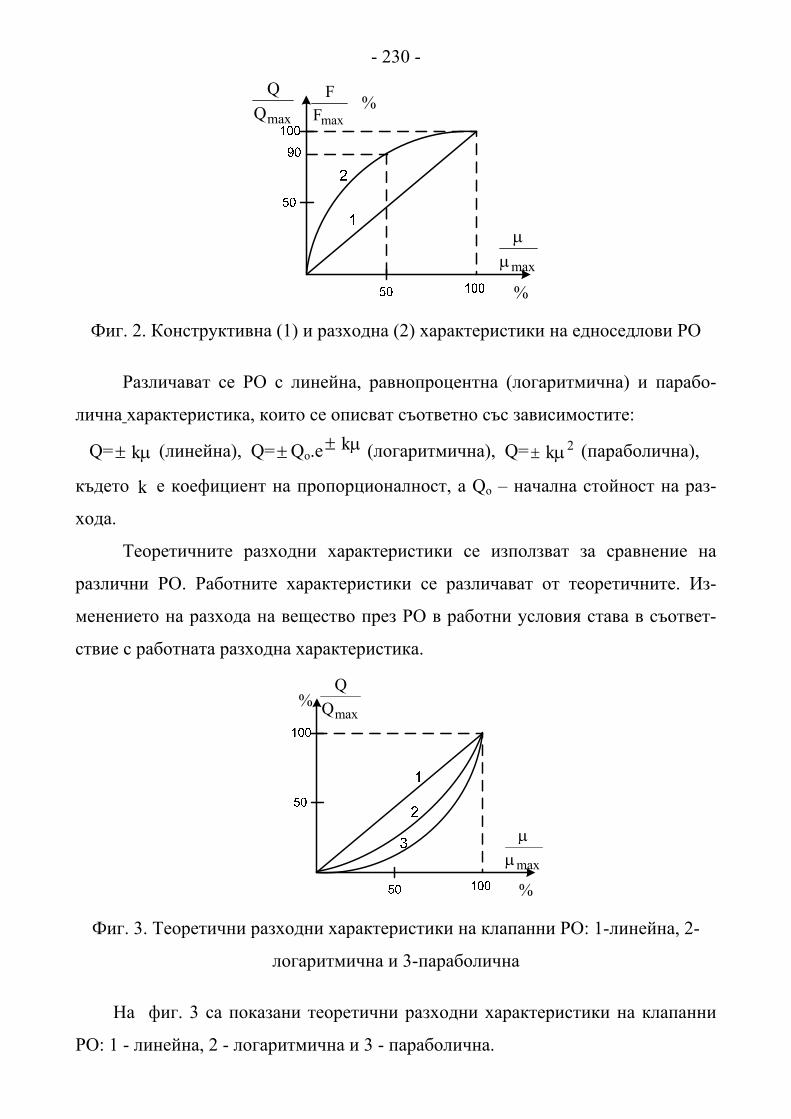
- 230 -
maxμμ
maxFF
maxQQ
%
%
Фиг. 2. Конструктивна (1) и разходна (2) характеристики на едноседлови РО
Различават се РО с линейна, равнопроцентна (логаритмична) и парабо-
лична характеристика, които се описват съответно със зависимостите:
Q=± μk (линейна), Q=±Qo.e± μk (логаритмична), Q=± 2kμ (параболична),
където k е коефициент на пропорционалност, а Qo – начална стойност на раз-
хода.
Теоретичните разходни характеристики се използват за сравнение на
различни РО. Работните характеристики се различават от теоретичните. Из-
менението на разхода на вещество през РО в работни условия става в съответ-
ствие с работната разходна характеристика.
maxμμ
maxQQ
%
%
Фиг. 3. Теоретични разходни характеристики на клапанни РО: 1-линейна, 2-
логаритмична и 3-параболична
На фиг. 3 са показани теоретични разходни характеристики на клапанни
РО: 1 - линейна, 2 - логаритмична и 3 - параболична.
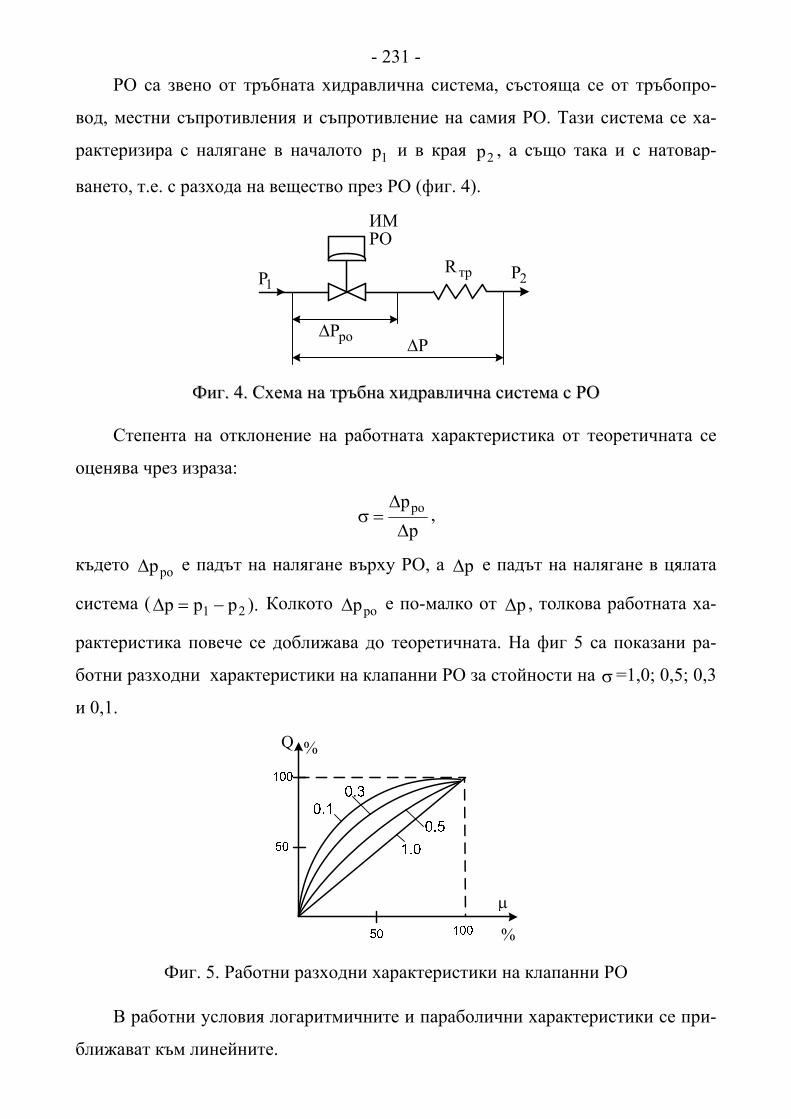
- 231 -РО са звено от тръбната хидравлична система, състояща се от тръбопро-
вод, местни съпротивления и съпротивление на самия РО. Тази система се ха-
рактеризира с налягане в началото 1p и в края 2р , а също така и с натовар-
ването, т.е. с разхода на вещество през РО (фиг. 4).
1P 2P
PΔpoPΔ
РОИМ
трR
ФФиигг.. 44.. ССххееммаа ннаа ттрръъббннаа ххииддррааввллииччннаа ссииссттееммаа сс РРОО
Степента на отклонение на работната характеристика от теоретичната се
оценява чрез израза:
ррроΔ
Δ=σ ,
където рорΔ е падът на налягане върху РО, а рΔ е падът на налягане в цялата
система ( ).ррр 21 −=Δ Колкото рорΔ е по-малко от рΔ , толкова работната ха-
рактеристика повече се доближава до теоретичната. На фиг 5 са показани ра-
ботни разходни характеристики на клапанни РО за стойности на σ=1,0; 0,5; 0,3
и 0,1.
μ
Q
%
%
Фиг. 5. Работни разходни характеристики на клапанни РО
В работни условия логаритмичните и параболични характеристики се при-
ближават към линейните.

- 232 -Чрез комбиниране на нелинейни характеристики с противоположна кри-
вина, може за дадена проектирана система да се получи линейна зависимост
между входната и изходната величини (чрез комбиниране между кривите от
фиг. 3 и фиг. 5).