transmitting streaming data in wireless multimedia sensor networks with holes
TRANSCRIPT
Transmitting Streaming Data in Wireless Multimedia Sensor Networks with Holes
Lei Shu1, ZhangBing Zhou1, Manfred Hauswirth1, Danh Le Phuoc1, Peng Yu2, Lin Zhang1 1Digital Enterprise Research Institute,
National University of Ireland, Galway
{lei.shu, zhangbing.zhou, manfred.hauswirth, danh.lephuoc, lin.zhang}@deri.org 2The College of Computer Science and Technology, Jilin University, Changchun, China
ABSTRACT
Within the vision of ubiquitous multimedia, using multimedia
sensor nodes, such as audio, image, and video sensor nodes, in
wireless sensor networks can dramatically enhance the capability
of sensor networks for event description. Different kinds of holes
can easily appear in sensor networks. For example, tens of sensor
nodes can consist of a hole in a small area because of overload.
Efficiently and reliably transmit these multimedia streaming data
back to the base station while bypassing these static or dynamic
holes is one of the key challenge issues. In this paper, we propose
a new Two Phase geographical Greedy Forwarding (TPGF)
routing algorithm for exploring one or multiple optimized hole-
bypassing transmission paths. We demonstrate the execution of
TPGF routing algorithm by using our implemented simulator
NetTopo. Comparison and simulation results show that our
algorithm can effectively solve the identified problems and is
better than the famous GPSR routing algorithm in both
functionality and performance aspects.
Keywords TPGF routing algorithm, streaming data, multimedia sensor
networks, hole-bypassing routing, multi-path transmission
1. INTRODUCTION Existing wireless communication systems, such as 3G cellular
networks and WLANs, and even the next generation all-IP based
networks, are infrastructure based and do not provide alternative
communication and transmission paths. Using wireless sensor
networks can make up the situation when the infrastructure is not
available or in case that quick network deployment over an
infrastructureless area is required.
Sensor networks aim at collecting important sensor data for
various applications. Using only simple sensor node, such as
temperature sensor, light sensor is not enough to reflect and
describe the phenomenon that happened in the sensor network
field. Image sensor, audio sensor, and video sensor, such as the
SenseCam made by Microsoft, can provide the information which
cannot be easily described by simple sensor node. Using
multimedia sensor nodes in wireless sensor networks can
dramatically enhance the capability of sensor networks for event
description. This is the basic reason why multimedia sensor nodes
are used in wireless sensor networks to provide comprehensive
information for describing complicated situations and
phenomenon. Consequently, following this kind of requirement,
efficiently gathering and transmitting multimedia streaming data
in wireless sensor networks is necessary when the underlying
infrastructure does not exist. Existing research work on sensor
data gathering are mainly based on tree topology and apply data
aggregation algorithms to reduce the number of packets. However,
multimedia streaming data transmission and gathering is different
from them in following two aspects: 1) multimedia streaming data
transmission is constrained by the maximum transmission
capacity of sensor node and 2) multimedia streaming data is not
suitable for aggregation. These differences require multi-path
transmission should be used to increase transmission performance
in wireless sensor networks, especially when the data generation
rate of multimedia source node is several times larger than the
maximum transmission capacity of sensor node.
Generally, a sensor network field is supposed to be 100% covered
by densely deployed sensor nodes. However, due to the random
aerial deployment or special ground features, such as pools and
swamps, some places inside sensor networks will not be covered
by any sensor node. These places are static holes inside sensor
networks. Moreover, some dynamic holes also can happen inside
sensor networks, such as tens of sensor nodes in a small area
overload because of transmitting multimedia streaming data.
Efficiently and reliably transmit these multimedia streaming data
back to the base station while bypassing these static or dynamic
holes is one of the key challenge issues for our research work.
In this paper, we first analyze the necessary design goals and
present the requirements for creating a new protocol to transmit
multimedia streaming data in wireless sensor networks. Then, we
propose a new Two Phase geographical Greedy Forwarding
(TPGF) routing algorithm for exploring single or multiple
optimized node-disjoint hole-bypassing transmission paths. The
contributions of this work are four aspects: 1) To the best of our
knowledge, TPGF routing algorithm is the first routing algorithm
that focuses on providing transmission for multimedia streaming
data in wireless sensor networks; 2) TPGF routing algorithm
provides a better solution for hole-bypassing in sensor networks
than other related research work; 3) TPGF routing algorithm can
guarantee the exploration result to find the routing paths if they
exist in sensor networks; 4) TPGF routing algorithm can optimize
its routing path by eliminating unnecessary circles contained in
this path.
Permission to make digital or hard copies of all or part of this work for
personal or classroom use is granted without fee provided that copies are
not made or distributed for profit or commercial advantage and that
copies bear this notice and the full citation on the first page. To copy
otherwise, or republish, to post on servers or to redistribute to lists,
requires prior specific permission and/or a fee.
MUM’07, December 12-14, 2007, Oulu, Finland.
Copyright 2007 ACM 978-1-59593-916-6/00/0004…$5.00.

The rest of this paper is organized as follows. In section 2, we
present the related work. Section 3 presents the design goals of
TPGF routing algorithm. We discuss the hole-bypassing in
section 4 and present the solution for the Block Situation that
GPSR cannot solve in section 5. We restrict the research scope of
multi-path transmission for our research work in section 6.
Section 7 shows the network model. Section 8 describes the
proposed TPGF routing algorithm. In section 9, we compare
TPGF routing algorithm with related research work. In section 10,
we demonstrate the simulation results, and in section 11 we
conclude this paper.
2. RELATED WORK In paper [1], a recent survey work on multimedia communication
in wireless sensor networks has been well conducted. The authors
analyzed and discussed the existing research work from both
multimedia field and sensor networks field in application layer,
transport layer and network layer. This survey work showed that
current existing protocols from both multimedia and sensor
networks fields are not suitable for multimedia communication in
wireless sensor networks, because they did not consider the
characteristics of multimedia streaming data transmission and
nature constrains of sensor networks at the same time. This survey
work also expatiated that there is no solution proposal specifically
tailored to address the routing problems of multimedia streams in
wireless sensor networks. Finally, this paper concluded that there
exists a clear need for a great deal of research effort to focus on
developing efficient communication protocols and algorithms in
order to realize multimedia WSN applications. This paper was
published in 2005, and we also had a searching work for finding
any published paper related to this issue during the years 2006
and 2007. However, to the best of our knowledge, we did not find
any publication after 2005 that is strongly related to this issue.
Hole-bypassing routing in wireless sensor networks is an on-
growing research issue. To the best of our knowledge, only four
related papers have been published since the year 2000. These
four research work basically can be classified into two categories:
1) Hole-bypassing without knowing hole information in advance
[2]; 2) Hole-bypassing with hole information & boundary nodes
information in advance [3, 4, 5].
Hole-bypassing without knowing hole information in advance: In paper [2], a greedy forwarding routing algorithm GPSR was
proposed. The input information of this GPSR routing algorithm
include: 1) The location information of base station; 2) The
location information of 1-hop neighbor nodes. A famous Local
Minimum Problem was also identified in this paper. Before
meeting the Local Minimum Problem, in GPSR, a sensor node
always choose the next-hop node which is closer to the base
station than itself. When a Local Minimum Problem is met in
GPSR, the authors adopt some graph theories, such as the Right
Hand Rule to solve the Local Minimum Problem. Basically,
GPSR considered a sensor network as a planar graph which
consists of nodes and links. The drawback of GPSR is that the
sensor network is not always ideally planar, which means that
using the planarizing algorithm only actually limits the useable
links in the sensor network for exploring possible routing paths.
Additionally, GPSR requires the maintenance of the underlying
planar graph, which introduces extra cost. Keeping a planar graph
at every node all the time, which is used only occasionally seems
unnecessary. The last key drawback of GPSR is that it does not
guarantee that it can always find the routing paths when they exist.
Hole-bypassing with hole information & boundary nodes
information in advance: In papers [3, 4], the authors followed
the approach of GPSR which also considered the sensor network
as a planar graph. They use graph theory to identify hole
boundary nodes first, then use the knowledge of these identified
boundary nodes to facilitate the hole-bypassing routing. The
methods in [3, 4] assume that all sensor nodes know the
destination’s location before the routing packages arrive them.
This assumption is not feasible for most working scenarios of
sensor networks, because generally a sensor node should get the
destination’s location information from incoming routing
packages but not by any other method in advance. Especially, in
paper [4], every sensor node is requested to identify whether it is
a first-class stuck node, which will consume a lot of energy. After
identifying the first-class stuck node, every remaining sensor node
is requested to identify again whether it is a second-class stuck
node, which will also consume a lot of energy. The actual routing
algorithm executes after identifying these first-class and second-
class stuck nodes. The key drawback of this research work is that
the identified stuck nodes are only suitable for the predefined base
station. If the location of the base station changes, some stuck
nodes are actually not stuck nodes any more. The proposed
algorithm should be executed in all sensor nodes again, which is
not flexible at all. In paper [5], the authors try to find an
optimized hole-bypassing routing path by using hole gemetric
modeling after knowing the information of holes in advance.
However, in this paper the hole information is obtained by using
the algorithm proposed in paper [3], which has an unfeasible
assumption.
Therefore, to propose the first routing protocol for addressing the
transmission problem of multimedia streams in wireless sensor
networks and find a reliable routing algorithm which dose not
need to identify hole information in advance but always can find
the routing paths when they exist are the key focuses of this paper.
3. DESIGN GOAL Since the appearance of battery powered wireless sensor networks,
large amounts of research work have been done to enable energy
efficiency in sensor networks. Energy efficiency seems to be a
permanent research issue for wireless sensor networks until the
day the Intellisensor company [6] releases their research result
that they have successfully recharged wireless sensor nodes by
using radio frequency (RF) power [7]. This new technology
suggests that the energy efficiency should not be an issue as a
research goal for our designed routing algorithm. In addition, we
also consider letting our designed routing algorithm to aim at
some sensor network applications that focus on the performance
issue with the highest priority, which means the energy
consumption of sensor networks will not be highly considered,
such as our previous research work [8].
Even though we do not consider the energy consumption issue in
our work, the limited transmission capacity of small sensor nodes
is still a problem for transmitting multimedia streaming data. It
can easily cause dynamic holes inside sensor networks when tens
of sensor nodes in a small area overload because of transmitting
multimedia streaming data. These dynamic holes and easily
appeared static holes pose the necessity for creating a new hole-

bypassing routing algorithm to facilitate the transmitting of
multimedia streaming data, and this new routing algorithm should
guarantee the efficiency and effectiveness of finding the routing
paths when they exist. Moreover, this new routing algorithm
should be able to be repeatedly executed by multimedia source
nodes to explore multiple additional routing paths if they are
needed. The feature of node-disjoint should be used because
generally multimedia streaming data transmission will use the
maximum transmission capacity of each path, which does not
allow the sharing of transmission path.
In short, we summarize our design goals as the following three
aspects: 1) Hole-bypassing, the designed routing algorithm should
be able to bypass holes; 2) Guarantee path exploration result, the
designed routing algorithm should be able to find the routing
paths if they exist; 3) Node-disjoint multi-path transmission, the
designed routing algorithm should be able to be executed
repeatedly to find multiple node-disjoint routing paths.
4. HOLE-BYPASSING Among our three design goals, the Hole-bypassing has the highest
priority in protocol realization, because it will highly affect the
performance of multimedia streaming data transmission, if some
holes cumber the routing paths.
In this paper, we classify holes into the following two kinds:
closed-circle hole and unclose-circle hole. Research work [3, 4, 5]
only focus on the closed-circle hole bypassing. Only the research
work [2] has the potential to bypass the unclose-circle hole
because of using Right Hand Rule, but not always guaranteed.
4.1 Closed-Circle Hole-Bypassing Closed-Circle Hole means that the hole exists inside the sensor
network, and it is fully surrounded by other active sensor nodes.
We give two examples to demonstrate three static holes in Figure
1 and one dynamic hole in Figure 2, respectively.
Figure 1. Three static holes in sensor network1
1 These kinds of pictures are generated in our implemented
simulator which is named as NetTopo. The red color node is the
multimedia source node. The green color node is the base
station. Black color nodes consist of holes. Blue color nodes are
normal sensor nodes. The brown color sensor nodes are working
in the routing paths. NetTopo is available at [10]. All the
pictures used in this paper are available at link [13].
Figure 2. One dynamic hole in sensor network
Figure 1 shows that static holes should be bypassed for building
up routing path. Figure 2 shows a dynamic hole exists in the
sensor networks because that a multimedia source node is using 8
node-disjoint paths for streaming data transmission.
The probability of bypassing a closed-circle hole based on the
approach of paper [3] is 100%, because when the routing path
meets the boundary node of a hole, the routing path can
successfully go further along the boundary of the hole either from
the clockwise side or the counterclockwise side (see Figure 19).
The probability of bypassing a closed-circle hole based on the
approach of paper GPSR [2] is also 100%, because using the
Right Hand Rule can always find the first counterclockwise node
as the next-hop node.
4.2 Unclosed-Circle Hole-Bypassing When both static holes and routing paths (dynamic holes) exist in
the sensor network, sometimes, the unclosed-circle hole will
appear, such as Figure 3. Originally, there is a static closed-circle
hole in the sensor network as shown in Figure 3 (a). After the
source node builds up a routing path, the original static hole and
routing path nodes consist of an unclose-circle hole as shown in
Figure 3 (b). In other words, the routing path nodes can enlarge
the holes, because these routing path nodes cannot be reused in
other routing paths (node-disjoint). Here, the unclose-circle hole
is not fully (just partially) surrounded by other alive sensor nodes.
The probability of bypassing an unclosed-circle hole based on the
approach of paper [3] is only 50%, because the routing path can
only successfully go further along the boundary of the hole from
(a) (b)
Figure 3. One unclosed-circle hole

Figure 4. The situation that GPSR cannot handle
the clockwise side, (in other situation maybe only from the
counterclockwise side). The probability of bypassing an unclosed-
circle hole based on the approach of GPSR in paper [2] is less
than 100% (not guaranteed), because even though the Right Hand
Rule actually can explore all the neighbor nodes of any sensor
node, but it does not handle the situation when no any neighbor
node is available for the next-hop transmission, and actually there
is an available path which can connect the source node and the
base station. We will discuss this problem further in section 5.
5. GUARANTEE EXPLORATION RESULT The Guarantee path exploration result has the second priority
among our three design goals, because for most situations using
only hole-bypassing routing algorithm can find the routing path
for transmission. The feature of Guarantee path exploration result
actually is designed to handle some special cases where using
only hole-bypassing routing algorithm cannot find the existing
routing paths.
As we discussed in subsection 4.2, GPSR does not always find the
routing path when it actually exists in the sensor network. For
example, in Figure 4, the exploration of GPSR will stop at the
yellow color node when no any neighbor node is available for the
next-hop transmission, shown as the black color path. In this
paper, we call this kind of situation as Block Situation. However,
actually the routing path shown as the blue color path can lead the
source node to the base station.
To handle the Block Situation, we propose the Step Back & Mark
approach: When a sensor node finds that it has no neighbor node
available for the next-hop transmission, it will step back to its
previous-hop node and mark itself as a block node. The previous-
hop node will attempt to find another available neighbor node as
the next-hop node. The Step Back & Mark will be repeatedly
executed until a sensor node successfully finds a routing path to
the base station.
The using of Step Back & Mark approach guarantees that the
TPGF algorithm can explore every connected sensor node, which
can be reached by source node in single or multiple hops, in the
sensor network to try to find the possible routing path. The feature
of Step Back & Mark approach can guarantee that the TPGF
routing algorithm can always find the routing paths if they exist.
We will demonstrate this feature in section 10.
6. MULTI-PATH TRANSMISSION Multi-path transmission is used to increase transmission
performance in wireless sensor networks. However, the Node-
disjoint multi-path transmission has the lowest priority in our
protocol realization, because once at least one routing path is built
for a source node, such as an image node, some amount of data
Figure 5. GPSR VS. LMR
can be transmitted to the base station. The feature of Node-
disjoint multi-path transmission can try to find more additional
routing paths for increasing the multimedia streaming data
transmission when it is necessary. However, multipath
transmission is not always guaranteed because there may be no
more routing path exists inside the sensor network.
The number of routing path is restricted by the number of
neighbor node. For example in Figure 5, the source node has only
two neighbor nodes, which limit the maximum number of routing
path as two. Moreover, the number of routing path is also affected
by the used routing algorithm. For example in following Figure 5,
if using greedy forwarding routing algorithm (GPSR) [2], the
number of routing path can be only one (black color path),
however, if using the label-based multi-path routing (LMR) [9],
the number of routing path can be two (green color path).
In this paper, we do not explore the research issue of maximizing
the number of routing path. We set using the shortest transmission
path as the basic criteria, and then explore the possible number of
routing path based on our designed routing algorithm.
It is clear that a protocol which can maximize the number of
routing path as well as bypassing all kinds of holes and guarantee
the exploration result will be a better protocol for multimedia
streaming data transmission. Here, we identify this kind of
protocol as the future work for our next step research.
7. NETWORK MODEL We consider a wireless multimedia sensor network consisting of
N sensor nodes and a base station to be randomly distributed over
an interested region. The location of sensor nodes and the base
station are fixed once deployed. The base station has the
knowledge of the locations of all sensor nodes, which can be
obtained by using GPS. Each sensor node knows its neighbor
nodes. C sensor nodes work as multimedia source nodes. All
source nodes continuously produce sensed data with a minimum
data generation rate R Kbps. Source nodes can dynamically
control (increase or decrease) their data generation rate by
changing the sampling frequency. The data from source nodes is
sent to the base station for further processing. H holes (void areas)
exist in the sensor network field.
8. TPGF ROUTING ALGORITHM In this section we present the proposed Two Phase geographical
Greedy Forwarding (TPGF) routing algorithm. The first phase of
TPGF routing algorithm is responsible for exploring the possible
routing path. The second phase of TPGF routing algorithm is
responsible for optimizing the found routing path with the shorter
transmission distance (less number of hops).
The TPGF routing algorithm can be executed repeatedly to find
multiple node-disjoint routing paths. In this paper, we do not
consider the scenario that multiple routing paths should be

explored simultaneously. We repeatedly execute the TPGF
routing algorithm in the same sensor network with the guarantee
that a sensor node will not be used twice by two different paths.
In TPGF, we assume that only source nodes know the location of
the base station. This assumption is same with the assumption that
used in GPSR [2]. The flowchart of TPGF routing algorithm is
presented in Figure 6. The detailed description of TPGF routing
algorithm is provided in following paragraphs.
It is worth noting that the input information of TPGF routing
algorithm are exactly same as the input information of GPSR.
Figure 6. Flowchart of TPGF routing algorithm
TPGF ROUTING ALGORITHM DESCRIPTION
Input:
Current node’s location information
Base station’s location information
1-hop neighbor nodes’ location information
Output:
Next-hop node’s location information
Or Successful acknowledgement
Or Unsuccessful acknowledgement
Initialization:
Deploy sensor network and multimedia source node.
Phase 1:
Step 1: The source node checks whether the base station is in its
one-hop neighbor nodes. If yes, then it builds up
routing/transmission path. If no, then the source node tries to find
the next-hop node which is the closet one to the base station
among all its neighbor nodes which have not been labeled
(occupied). A degressive number-based label is given to the
chosen sensor node along with a path number. If no more usable
one-hop neighbor node, the source node produces an
unsuccessful acknowledgement and stops transmitting.
Step 2: The chosen sensor node checks whether the base station is
in its one-hop nodes. If yes, then it builds up routing/transmission
path. If no, then the chosen sensor node always tries to find the
next-hop node which is the closest one to the base station among
its all neighbor nodes which have not been labeled (occupied). A
degressive number-based label is given to the found next-hop
node along with a path number. When this sensor node finds that
it has no neighbor node is available for the next-hop transmission,
which means the Block Situation is met, it will step back to its
previous-hop node and mark itself as a block node. The previous-
hop node will attempt to find another available neighbor node as
the next-hop node. The Step Back & Mark will be repeatedly
executed until a sensor node successfully finds a next-hop node
which has a routing path to the base station.
Phase 2:
Step 3: Once the routing/transmission path is built up. A
successful acknowledgement is sent back from the base station to
the source node. Any sensor node which belongs to this path only
relays packets to its one-hop neighbor node which is labeled in
Step 2 and has the largest number. A release command is sent to
all other one-hop neighbor nodes which are labeled in Step 2 but
are not used for transmission. After receiving the
acknowledgement, the source node then starts to send out
multimedia streaming data to the successful path with the pre-
assigned path number.
The time complexity of this algorithm is )(nO where n is the
number of nodes in this sensor network, because at most (n-1)
edges would be traversed for a search and each edge can be
traversed no more than twice.
9. HIGH LEVEL COMPARISON We give a high level comparison with related research work to
highlight the differences and advantages of our TPGF routing
algorithm. Basically, the hole-bypassing part in TPGF routing
algorithm is different from related work [3, 4, 5], because TPGF
does not need to identify the hole information in advance, which
actually reduces the complexity of hole-bypassing routing. Using
hole information as the additional information for hole-bypassing
actually makes the problem be much easier. In this paper, we do
not compare TPGF with these three research work, because the
basic assumption for algorithm input is different.
TPGF can be categorized into the class of Hole-bypassing
without knowing hole information in advance. However, TPGF
is still different from GPSR. In this paper, we focus on the
comparison between GPSR and TPGF.
9.1 Function level comparison
Figure 7. Component based overview of GPSR
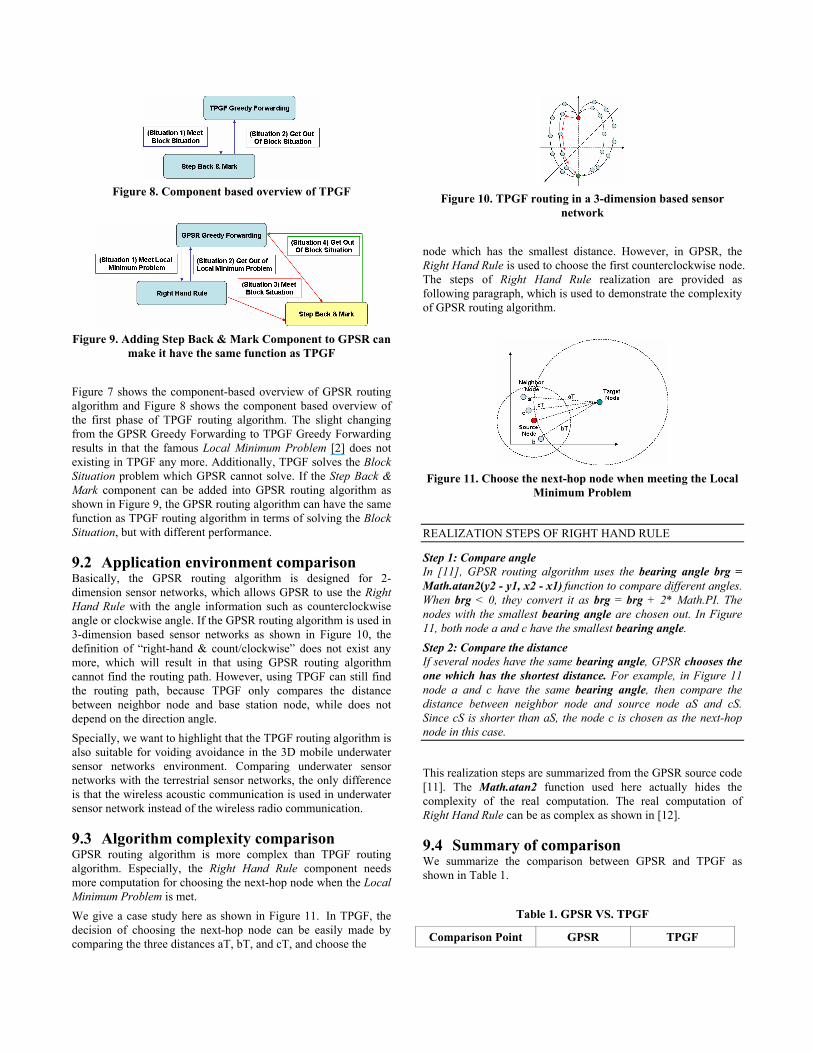
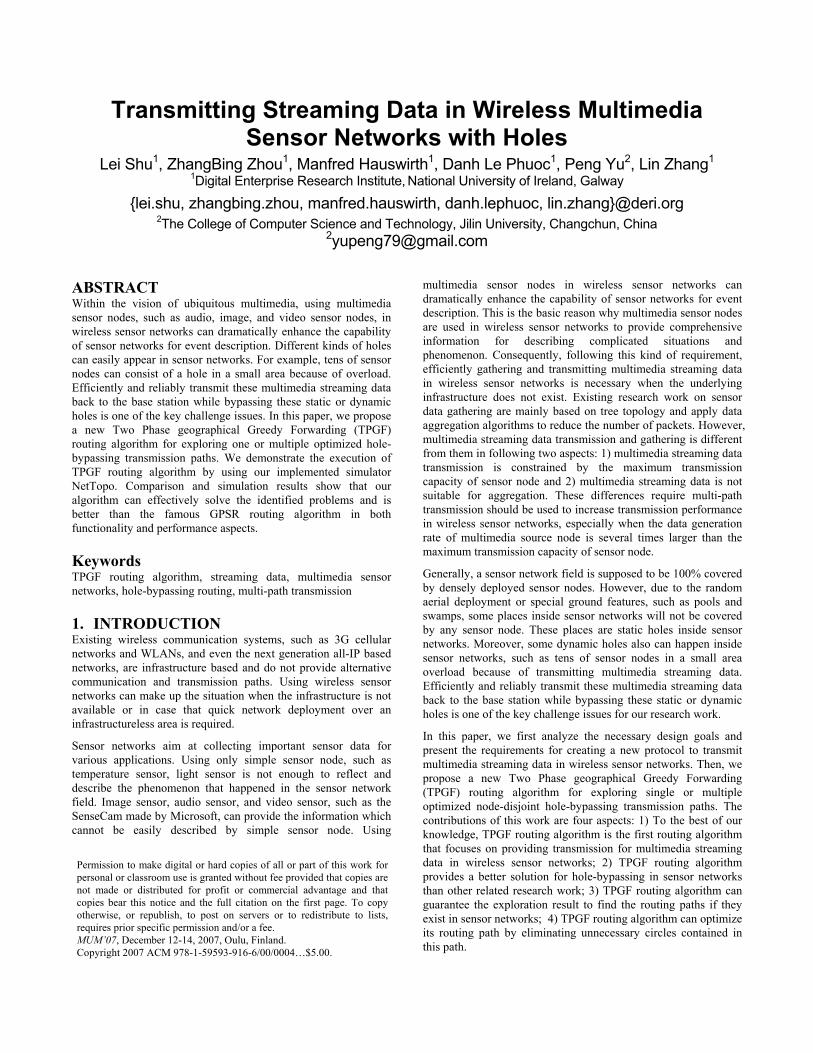
Figure 8. Component based overview of TPGF
Figure 9. Adding Step Back & Mark Component to GPSR can
make it have the same function as TPGF
Figure 7 shows the component-based overview of GPSR routing
algorithm and Figure 8 shows the component based overview of
the first phase of TPGF routing algorithm. The slight changing
from the GPSR Greedy Forwarding to TPGF Greedy Forwarding
results in that the famous Local Minimum Problem [2] does not
existing in TPGF any more. Additionally, TPGF solves the Block
Situation problem which GPSR cannot solve. If the Step Back &
Mark component can be added into GPSR routing algorithm as
shown in Figure 9, the GPSR routing algorithm can have the same
function as TPGF routing algorithm in terms of solving the Block
Situation, but with different performance.
9.2 Application environment comparison Basically, the GPSR routing algorithm is designed for 2-
dimension sensor networks, which allows GPSR to use the Right
Hand Rule with the angle information such as counterclockwise
angle or clockwise angle. If the GPSR routing algorithm is used in
3-dimension based sensor networks as shown in Figure 10, the
definition of “right-hand & count/clockwise” does not exist any
more, which will result in that using GPSR routing algorithm
cannot find the routing path. However, using TPGF can still find
the routing path, because TPGF only compares the distance
between neighbor node and base station node, while does not
depend on the direction angle.
Specially, we want to highlight that the TPGF routing algorithm is
also suitable for voiding avoidance in the 3D mobile underwater
sensor networks environment. Comparing underwater sensor
networks with the terrestrial sensor networks, the only difference
is that the wireless acoustic communication is used in underwater
sensor network instead of the wireless radio communication.
9.3 Algorithm complexity comparison GPSR routing algorithm is more complex than TPGF routing
algorithm. Especially, the Right Hand Rule component needs
more computation for choosing the next-hop node when the Local
Minimum Problem is met.
We give a case study here as shown in Figure 11. In TPGF, the
decision of choosing the next-hop node can be easily made by
comparing the three distances aT, bT, and cT, and choose the
Figure 10. TPGF routing in a 3-dimension based sensor
network
node which has the smallest distance. However, in GPSR, the
Right Hand Rule is used to choose the first counterclockwise node.
The steps of Right Hand Rule realization are provided as
following paragraph, which is used to demonstrate the complexity
of GPSR routing algorithm.
Figure 11. Choose the next-hop node when meeting the Local
Minimum Problem
REALIZATION STEPS OF RIGHT HAND RULE
Step 1: Compare angle
In [11], GPSR routing algorithm uses the bearing angle brg =
Math.atan2(y2 - y1, x2 - x1) function to compare different angles.
When brg < 0, they convert it as brg = brg + 2* Math.PI. The
nodes with the smallest bearing angle are chosen out. In Figure
11, both node a and c have the smallest bearing angle.
Step 2: Compare the distance
If several nodes have the same bearing angle, GPSR chooses the
one which has the shortest distance. For example, in Figure 11
node a and c have the same bearing angle, then compare the
distance between neighbor node and source node aS and cS.
Since cS is shorter than aS, the node c is chosen as the next-hop
node in this case.
This realization steps are summarized from the GPSR source code
[11]. The Math.atan2 function used here actually hides the
complexity of the real computation. The real computation of
Right Hand Rule can be as complex as shown in [12].
9.4 Summary of comparison We summarize the comparison between GPSR and TPGF as
shown in Table 1.
Table 1. GPSR VS. TPGF
Comparison Point GPSR TPGF
Greedy Forwarding
Current node
always tries to
find the next-
hop node which
is closer to the
base station
than itself
Current node
always tries to
find the next-hop
node which is
closest to the
based station
among all
neighbor nodes,
the next-hop node
can be further to
the base station
than itself
Local Minimum
Problem Exist Does not exist
Block Situation
When the sensor
node finds that
it has no
neighbor node
available for the
next-hop
transmission
No block
situation, it is
solved by Step
Back & Mark
approach
Maintenance of the
underlying planar
graph
Yes, required Not required
Applicable for 3-D
sensor networks
Not applicable,
because the
Right Hand
Rule only works
for 2-D
Applicable,
because only the
distance between
sensor nodes are
compared
Guarantee
exploration result
No, because the
block situation
exists
Yes, because the
Step Back & Mark
approach solve
the problem
Multi-path
transmission
No, GPSR is not
designed for
this, because the
planarizing
graph will make
the graph lose
many links,
which could be
used in the
multiple paths
Yes, TPGF is
designed for
multi-path
transmission
10. SIMULATION
10.1 Simulation environment In order to demonstrate our proposed TPGF routing algorithm, we
have implemented a sensor network simulator called NetTopo
[10]. Currently, NetTopo is a new research oriented sensor
network simulator. Some parts of its functions are still on the
developing stage, and more features will be implemented. Thus,
the NetTopo source code is not opened yet. However, NetTopo
has been used in some research work, such as our previous paper
[8]. NetTopo allow users to deploy a sensor network with a size
up to 500 Meters * 500 Meters, number of sensor node up to 400,
and number of source nodes up to 100. Table 2 shows the
parameters used in our simulation.
Table 2. Simulation parameters
Parameter Value
Network Size 500 M * 500 M
Base Station Location Corner or Central
Number of Base Station 1
Number of Sensor Node 399
Number of Source Node 1 or 3
Initial Energy of Base Station Not limited
Initial Energy of Sensor Node 36 J (3 batteries)
Minimum Flux of Stream Data R 5 kbps
Sensor Node Maximum TC 10 kbps
Transmission Radius 60 M
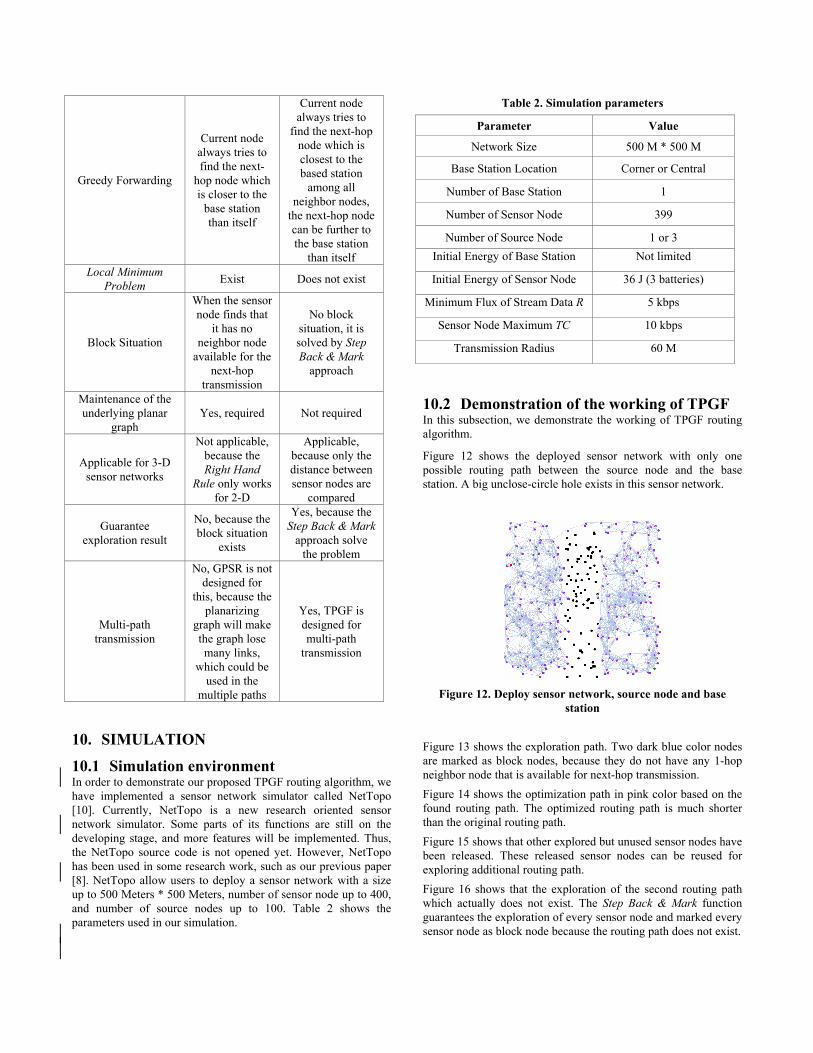
10.2 Demonstration of the working of TPGF In this subsection, we demonstrate the working of TPGF routing
algorithm.
Figure 12 shows the deployed sensor network with only one
possible routing path between the source node and the base
station. A big unclose-circle hole exists in this sensor network.
Figure 12. Deploy sensor network, source node and base
station
Figure 13 shows the exploration path. Two dark blue color nodes
are marked as block nodes, because they do not have any 1-hop
neighbor node that is available for next-hop transmission.
Figure 14 shows the optimization path in pink color based on the
found routing path. The optimized routing path is much shorter
than the original routing path.
Figure 15 shows that other explored but unused sensor nodes have
been released. These released sensor nodes can be reused for
exploring additional routing path.
Figure 16 shows that the exploration of the second routing path
which actually does not exist. The Step Back & Mark function
guarantees the exploration of every sensor node and marked every
sensor node as block node because the routing path does not exist.
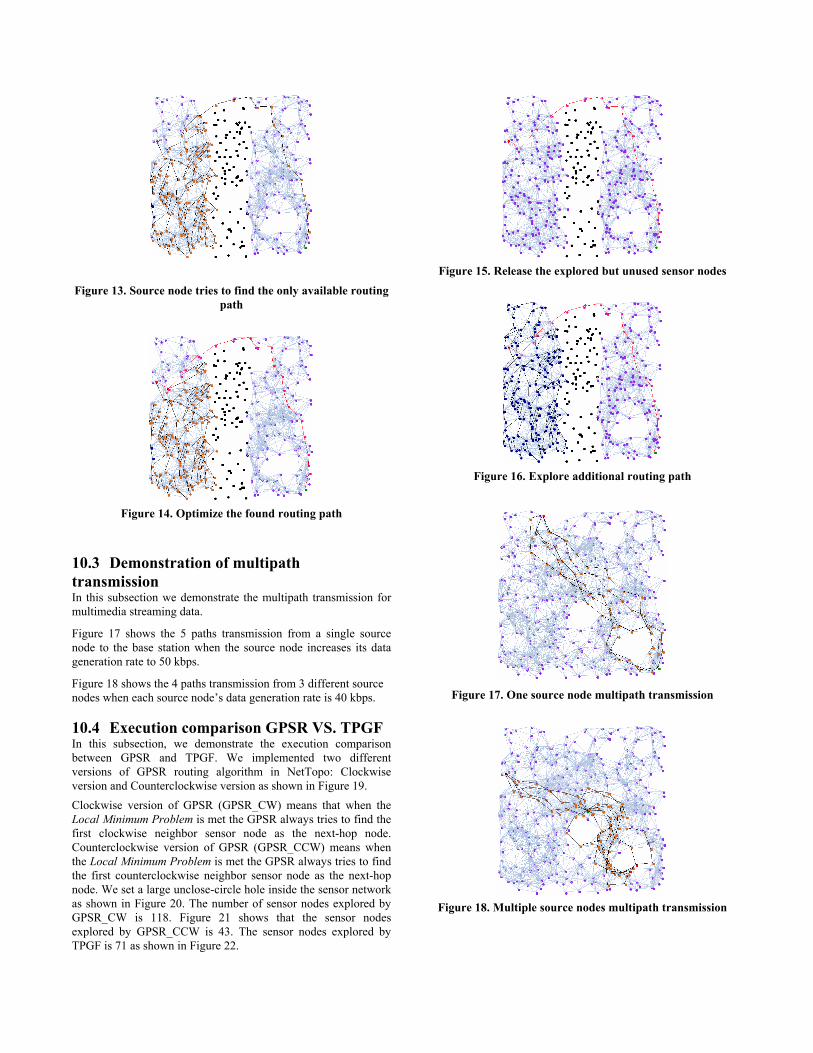
Figure 13. Source node tries to find the only available routing
path
Figure 14. Optimize the found routing path
10.3 Demonstration of multipath
transmission In this subsection we demonstrate the multipath transmission for
multimedia streaming data.
Figure 17 shows the 5 paths transmission from a single source
node to the base station when the source node increases its data
generation rate to 50 kbps.
Figure 18 shows the 4 paths transmission from 3 different source
nodes when each source node’s data generation rate is 40 kbps.
10.4 Execution comparison GPSR VS. TPGF In this subsection, we demonstrate the execution comparison
between GPSR and TPGF. We implemented two different
versions of GPSR routing algorithm in NetTopo: Clockwise
version and Counterclockwise version as shown in Figure 19.
Clockwise version of GPSR (GPSR_CW) means that when the
Local Minimum Problem is met the GPSR always tries to find the
first clockwise neighbor sensor node as the next-hop node.
Counterclockwise version of GPSR (GPSR_CCW) means when
the Local Minimum Problem is met the GPSR always tries to find
the first counterclockwise neighbor sensor node as the next-hop
node. We set a large unclose-circle hole inside the sensor network
as shown in Figure 20. The number of sensor nodes explored by
GPSR_CW is 118. Figure 21 shows that the sensor nodes
explored by GPSR_CCW is 43. The sensor nodes explored by
TPGF is 71 as shown in Figure 22.
Figure 15. Release the explored but unused sensor nodes
Figure 16. Explore additional routing path
Figure 17. One source node multipath transmission
Figure 18. Multiple source nodes multipath transmission
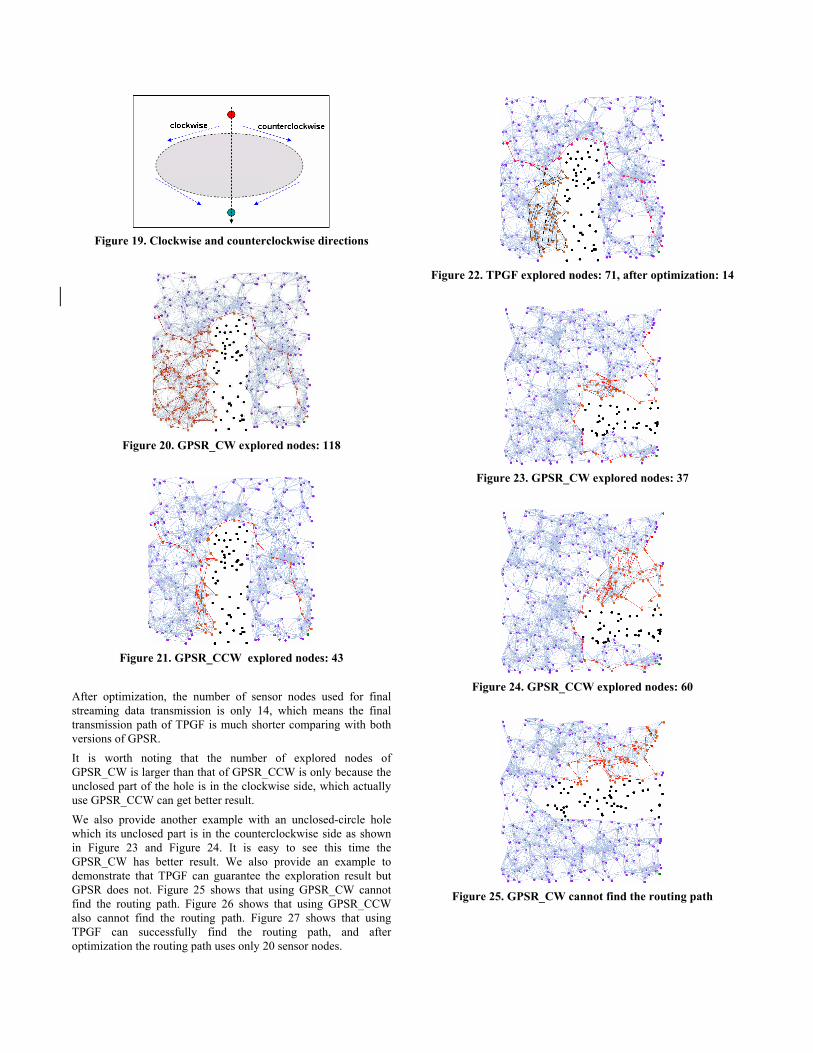
Figure 19. Clockwise and counterclockwise directions
Figure 20. GPSR_CW explored nodes: 118
Figure 21. GPSR_CCW explored nodes: 43
After optimization, the number of sensor nodes used for final
streaming data transmission is only 14, which means the final
transmission path of TPGF is much shorter comparing with both
versions of GPSR.
It is worth noting that the number of explored nodes of
GPSR_CW is larger than that of GPSR_CCW is only because the
unclosed part of the hole is in the clockwise side, which actually
use GPSR_CCW can get better result.
We also provide another example with an unclosed-circle hole
which its unclosed part is in the counterclockwise side as shown
in Figure 23 and Figure 24. It is easy to see this time the
GPSR_CW has better result. We also provide an example to
demonstrate that TPGF can guarantee the exploration result but
GPSR does not. Figure 25 shows that using GPSR_CW cannot
find the routing path. Figure 26 shows that using GPSR_CCW
also cannot find the routing path. Figure 27 shows that using
TPGF can successfully find the routing path, and after
optimization the routing path uses only 20 sensor nodes.
Figure 22. TPGF explored nodes: 71, after optimization: 14
Figure 23. GPSR_CW explored nodes: 37
Figure 24. GPSR_CCW explored nodes: 60
Figure 25. GPSR_CW cannot find the routing path
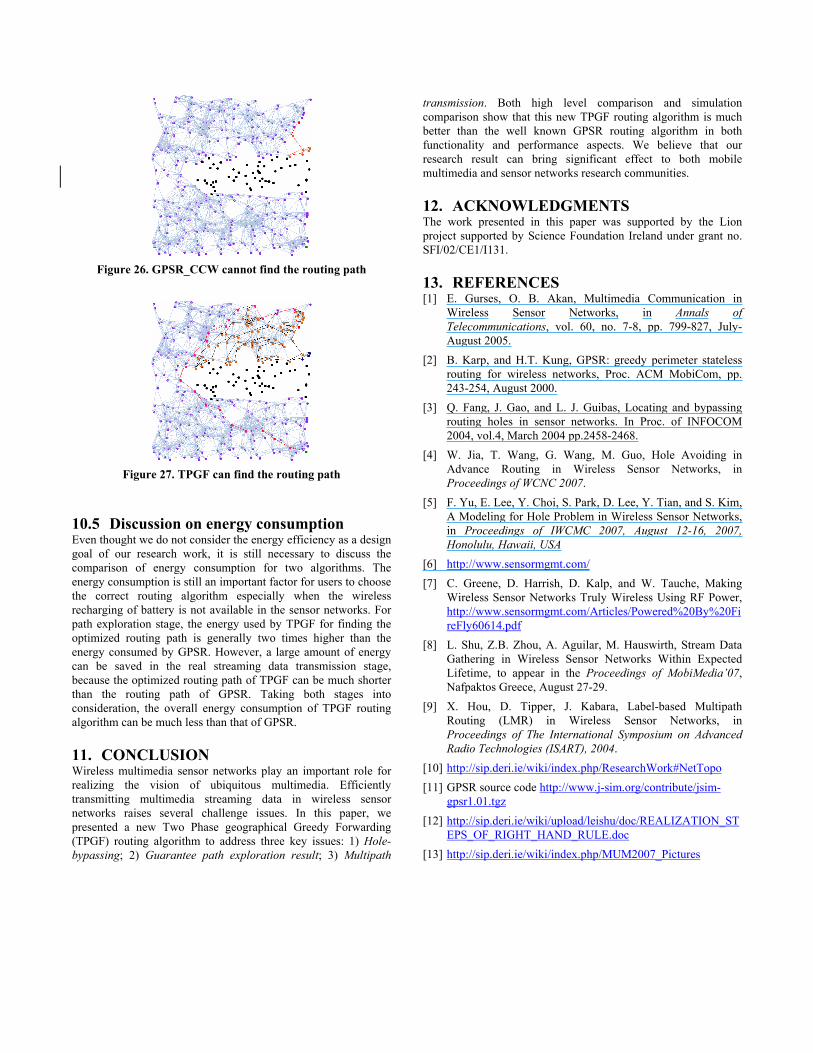
Figure 26. GPSR_CCW cannot find the routing path
Figure 27. TPGF can find the routing path
10.5 Discussion on energy consumption Even thought we do not consider the energy efficiency as a design
goal of our research work, it is still necessary to discuss the
comparison of energy consumption for two algorithms. The
energy consumption is still an important factor for users to choose
the correct routing algorithm especially when the wireless
recharging of battery is not available in the sensor networks. For
path exploration stage, the energy used by TPGF for finding the
optimized routing path is generally two times higher than the
energy consumed by GPSR. However, a large amount of energy
can be saved in the real streaming data transmission stage,
because the optimized routing path of TPGF can be much shorter
than the routing path of GPSR. Taking both stages into
consideration, the overall energy consumption of TPGF routing
algorithm can be much less than that of GPSR.
11. CONCLUSION Wireless multimedia sensor networks play an important role for
realizing the vision of ubiquitous multimedia. Efficiently
transmitting multimedia streaming data in wireless sensor
networks raises several challenge issues. In this paper, we
presented a new Two Phase geographical Greedy Forwarding
(TPGF) routing algorithm to address three key issues: 1) Hole-
bypassing; 2) Guarantee path exploration result; 3) Multipath
transmission. Both high level comparison and simulation
comparison show that this new TPGF routing algorithm is much
better than the well known GPSR routing algorithm in both
functionality and performance aspects. We believe that our
research result can bring significant effect to both mobile
multimedia and sensor networks research communities.
12. ACKNOWLEDGMENTS The work presented in this paper was supported by the Lion
project supported by Science Foundation Ireland under grant no.
SFI/02/CE1/I131.
13. REFERENCES [1] E. Gurses, O. B. Akan, Multimedia Communication in
Wireless Sensor Networks, in Annals of
Telecommunications, vol. 60, no. 7-8, pp. 799-827, July-
August 2005.
[2] B. Karp, and H.T. Kung, GPSR: greedy perimeter stateless
routing for wireless networks, Proc. ACM MobiCom, pp.
243-254, August 2000.
[3] Q. Fang, J. Gao, and L. J. Guibas, Locating and bypassing
routing holes in sensor networks. In Proc. of INFOCOM
2004, vol.4, March 2004 pp.2458-2468.
[4] W. Jia, T. Wang, G. Wang, M. Guo, Hole Avoiding in
Advance Routing in Wireless Sensor Networks, in
Proceedings of WCNC 2007.
[5] F. Yu, E. Lee, Y. Choi, S. Park, D. Lee, Y. Tian, and S. Kim,
A Modeling for Hole Problem in Wireless Sensor Networks,
in Proceedings of IWCMC 2007, August 12-16, 2007,
Honolulu, Hawaii, USA
[6] http://www.sensormgmt.com/
[7] C. Greene, D. Harrish, D. Kalp, and W. Tauche, Making
Wireless Sensor Networks Truly Wireless Using RF Power,
http://www.sensormgmt.com/Articles/Powered%20By%20Fi
reFly60614.pdf
[8] L. Shu, Z.B. Zhou, A. Aguilar, M. Hauswirth, Stream Data
Gathering in Wireless Sensor Networks Within Expected
Lifetime, to appear in the Proceedings of MobiMedia’07,
Nafpaktos Greece, August 27-29.
[9] X. Hou, D. Tipper, J. Kabara, Label-based Multipath
Routing (LMR) in Wireless Sensor Networks, in
Proceedings of The International Symposium on Advanced
Radio Technologies (ISART), 2004.
[10] http://sip.deri.ie/wiki/index.php/ResearchWork#NetTopo
[11] GPSR source code http://www.j-sim.org/contribute/jsim-
gpsr1.01.tgz
[12] http://sip.deri.ie/wiki/upload/leishu/doc/REALIZATION_ST
EPS_OF_RIGHT_HAND_RULE.doc
[13] http://sip.deri.ie/wiki/index.php/MUM2007_Pictures