theory of linear viscoelasticity of chiral liquid crystals
TRANSCRIPT
Rheol Acta 35:400-409 (1996) © Steinkopff Verlag 1996 ORIGINAL CONTRIBUTION
Alejandro D. Rey Theory of linear viscoelasticity of chiral liquid crystals
Received: 23 April 1996 Accepted: 19 August 1996
Dr. A.D. Rey (~) Department of Mechanical Engineering McGill University Montreal, Quebec H3A 2A7, Canada
Abstract The governing equations of monodomain isothermal cholesteric liquid crystals subjected to small amplitude oscillatory rec- tilinear shear have been derived for three representative helix orienta- tions. -The imposition of oscillatory flow excites splay-bend-twist defor- mations when the helix is aligned along the flow direction, splay-bend deformations when the helix is along the vorticity gradient, and twist deformations when aligned along the velocity axis. The dif- ferent nature of the excited elastic modes as well as the anisotropic viscosities are reflected in the anisotropy of the linear viscoelastic material functions for small ampli- tude rectilinear oscillatory shear. When the helix is aligned along the flow direction, cholesteric viscoelasticity is strongest, and ex-
ists in a relatively narrow band of intermediate frequencies. When the helix is aligned along the vorticity direction cholesteric viscoelasticity is significant in a relatively broad range of intermediate frequencies. Finally, when the helix is aligned along the velocity gradient direc- tion, cholesteric viscoelasticity is relatively insignificant and only ex- ists in a narrow band of frequen- cies. The cholesteric pitch controls the location of viscoelastic region on the frequency spectrum, but on- ly when the helix is not oriented along the vorticity axis.
Key words Macroscopic theory - cholesteric liquid crystals - linear viscoelasticity - oscillatory shear - storage and loss moduli - dynamic viscosity
Introduction
Cholesteric or chiral nematic liquid crystals are an impor- tant class of biological and synthetic materials, in which the average macroscopic molecular orientation displays a twist distortion in a direction normal to the molecules (de Gennes and Prost, 1993), known as the cholesteric helix. Certain solutions of DNA (Leforestier and Livolant, 1992), solutions of polypeptides in suitable organic solvents, solutions of hydroxypropylcellulose in water, and cholesterol derivatives are examples of cholesteric li- quid crystals (de Gennes and Prost, 1993; Chandrasekhar, 1992). The rheological characterization of cholesteric ma-
terials is the subject of continuing work (see, for example, Guido and Grizzuti (1995), Walker and Wagner (1994), Hongladarom et al. 1994)), and appears to be less understood than nematorheology (see, for example, Mar- rucci (1991), de Gennes and Prost (1993), Srinivasarao (/995)). Previous theory and simulation work on the shear flow of cholesteric liquid crystals has considered helix orientations along the flow direction (de Gennes and Prost, 1993; Chandrasekhar, 1992), along the velocity gradient direction (Kini, 1979; Leslie, 1969), and along the vorticity axis (Derfel, 1983; Rey, 1996a, b). A recent review of cholesteric rheology is given in (Scaramuzza and Carbone, 1988). It is expected that a better funda- mental understanding of cholesteric rheology will be use-
A.D. Rey 401 Theory of linear viscoelasticity of chiral liquid crystals
ful in the interpretation of existing experimental data on cholesteric liquid crystal polymers and in the design of new material applications.
A widely used tool for viscoelastic characterization is small amplitude oscillatory shear flow (Larson, 1988), through the measurements of the dynamic storage modulus (G') and the dynamic loss modulus (G"). The elastic modes of single component nematic liquid crystals arise from director gradients (Frank elasticity), and from departures of the order parameters (de Gennes and Prost, 1993) from their equilibrium values (molecular elasticity). For uniaxial nematic mixtures a third type of elasticity arises from relative rotations of the directors correspond- ing to the different mixture components (Pleiner and Brand, 1985). Cholesterics or chiral nematic liquid crys- tals also display all these types of elastic modes. In the present paper we concentrate on cholesteric Frank elastic- ity, that is elastic storage modes that arise in a cholesteric helix when subjected to weak flows. Neglecting all surface influences, the fundamental distinction with respect to defect-free monodomain nematics arises from the fact that the equilibrium structure of defect-free monodomain cholesterics are non-homogeneous (spatially periodic) while nematics are homogeneous. Since liquid crystals are highly anisotropic the periodic helical cholesteric struc- ture is able to store elastic energy even in homogeneous flow, thus explaining the origin of the viscoelasticity even in the absence of surface effects.
Theoretical and experimental studies (Burghardt, 1991; Mather et al., 1995) of the nematic viscoelasticity in the presence of Frank elasticity due to surface anchor- ing shows that at high and low frequencies nematics essentially behave as viscous fluids, and at intermediate frequencies close to the reciprocal director relaxation time, the nematic liquid crystal is viscoelastic. In this case t/' exhibits the typical low and high frequency plateaus, while rl" exhibits a Lorentzian peaking at a frequency co * = 1~'OF, where rF = l l /Kcl 2 is the relaxation time, K is a representative Frank elastic constant, d is the sample thickness, and ¢t is a characteristic viscosity. On the other hand, studies (Hess, 1977) of viscoelasticity of single component nematics in the presence of molecular elastici- ty show essentially the same behavior as with the Frank elasticity, with r/" peaking at a frequency co*= I/"CM, where z~/= p / A is the relaxation time, A is molecular elastic modulus (energy/volume) and/~ is a characteristic viscosity. Essentially the same frequency behavior of the complex viscosity was predicted for nematic mixture elasticity (Pleiner and Brand, 1985; Rey, 1996c). In this paper we characterize the corresponding viscoelastic be- havior arising from cholesteric elasticity.
The objectives of this paper are: i) to present a mac- roscopic mechanical theory for cholesterics; ii) to present the material functions of linear viscoelasticity for small amplitude oscillatory shear flow of monodomain isother- mal uniaxial cholesteric liquid crystals composed of rod-
like mesogens, iii) to characterize the pitch and frequency dependence of the cholesteric viscoelasticity, and iv) to identify the role of the helix orientation on the visco- elastic response. As a first step we restrict the main discus- sion to: i) uniaxial monodomain cholesteric liquid crys- tals, and ii) isothermal and small amplitude oscillatory shear flows. We do not consider molecular elasticity, Frank elasticity arising from surface anchoring effects, or texture elasticity, thus restricting the validity of the predictions to conditions where they are negligible (de Gennes and Prost, 1993).
The paper is organized as follows. The second section presents the governing macroscopic rheological equations for monodomain isothermal cholesterics, and identifies the main intrinsic and extrinsic length and time scales of the model. The third section presents solutions for the orientation field and the linear viscoelastic material func- tions as function of frequency for the three characteristic helix orientations: i) along the flow direction, ii) along the velocity gradient, and iii) along the vorticity axis. A dis- cussion of the sensitivity of the results to the initial helix alignment is presented. The final section 4 gives the con- clusions.
Governing equations
Cholesteric ordering
The perfect helical ordering characteristic of cholesterics at equilibrium is captured by a unit vector (director) no(z) such that:
no(z) = (cos Oo(z), sin Oo(z), O) (1)
where the subscript "0" denotes equilibrium and where the orientation angle at equilibrium Oo(z) is given by
7~ Oo = - - z--- qoz (2)
e0
where P0 (q0) is the equilibrium half-pitch (wave vector) of the helix, or distance in which the director rotates by n radians. In this paper we only consider a right-handed helix (q0 > 0). It is useful to define the helix orientation with a unit vector h. A schematic showing the director orientation in a full pitch of a cholesteric helix at equilibrium and oriented along the z-axis is shown in Fig. 1; in this case the director no is given by Eq. (1). In contrast to nematic liquid crystals, cholesteric liquid crystals have an intrinsic length scale given by the equilibrium half-pitch P0- This means that at length scales shorter than P0, a cholesteric is similar to a nematic, but at length scales longer than P0, a cholesteric is a layered liquid similar to a smectic A liquid crystal. As

402 Rheologica Acta, Vol. 35, No. 5 (1996) © Steinkopff Verlag 1996
z I-! !.1 h r
Po
2 Po IP,
Fig. 1 Schematic showing the director orientation in a full pitch of a cholesteric helix at equilibrium. The directors are represented by the thick vertical segments. P0 (2/o) is the half-pitch (full pitch) of the helix, and is the distance in which the director rotates by n (2~) radians, h is a unit vector parallel to the helix angle. In contrast to nematic liquid crystals, cholesteric liquid crystals have an intrinsic length scale given by the equilibrium half-pitch P0. At length scales shorter (longer) than P0 a cholesteric behaves as a nematic (smec- tic)
a consequence two basic elastic twist modes appear: i) elastic storage may proceed by director distortions with an equilibrium pitch (no :~ n, P = P0), and ii) elastic storage may proceed by deviations of the pitch P from its equilibrium value P0 (no = n, P ¢ P0) such as by pitch ex- tension or compression. In addition flow-induced devia- tions from planar orientation lead to splay-bend elastic modes, such that the helix vector h becomes position dependent.
Leslie continuum theory of cholesterics
The continuum theory of flow phenomena in uniaxial cholesteric liquids was given by Leslie (1969, 1979). The anisotropic structure is described by the director n, which represents the average molecular orientation, and defines the axis of cylindrical symmetry. The classical theories of fluids describe the kinematics by specifying only the velocity field, while for a fluid with microstructure the additional specification of the director field is required. This explicit account of the microstructure gives rise to the internal angular momentum balance equation. The Leslie balance equations, using cartesian tensor notation, are (de Gennes and Prost, 1993):
vi, i = 0; pOi = F i + ~ i , i - P f i j , ; 0 e = F i + F i (3 a, b, c)
The fluid is assumed to be incompressible; p is the density and p is the pressure. The superposed dot denotes the ma- terial time derivative. The inertia of the director is neglected. The mechanical quantities appearing in the theory are defined as follows: F i = external body force per unit volume, ~i = extra-stress tensor, F~ = elastic torque per unit volume, and F v = viscous torque per unit volume. In the absence of temperature gradients and elec- tromagnetic fields the constitutive equations are:
i '= { + t e (4a)
i '= al ( n n : A ) n n + a 2 n M + a 3 M n
+ a4A + a s n n ' A + a6 A . n n (4b)
OF t e = (4c) O V n ' ( V n ) r
~ F F e = n x I I = - n x - - (4d)
~n
F v = - n x (7~M+ 72 A . n ) (4 e)
where
71 = a3 - a2 (5 a)
72 = a 6 - - a 5 = a3 + a 2 (5 b)
The a i = ] . . . . . 6 are the Leslie coefficients, and the ratio = - - 7 2 / 7 1 is called the reactive parameter; H is the mo-
lecular field and c~/c~n denotes the functional derivative. The kinematic quantities appearing in the constitutive equations are:
M i = n i - Diknk (6a)
Oik = (vi, k -- Vk. i ) / 2 (6 b)
Aik = (vi, k + vk, i)/2 (6 c)
M i is the angular velocity of the director with respect to that of the fluid, g?ik is the vorticity tensor, and Aik is the rate of deformation tensor. The free energy density, F, is given by (de Gennes and Prost, 1993):
2 F = K l l ( V ' n ) 2 + K z 2 ( n ' V × n + q o ) Z +K33 [nxVxn l z (7)
where the three elastic modes are characterized by K~, K22, /(33 known as the splay, twist, and bend elastic constants. The above equations are, except for the term q0 appearing in (7), identical to those for nematic liquid crystals.
For nematic liquid crystals in steady simple shear flows the characteristic viscosities are (de Gennes and Prost, 1993):
1 1 r/a = ~ (a4); J/b = ~ (a3 + a 4 + a 6 ) ;
1 rlc = - ( - a 2 + a 4 + a s ) (8a, b, c)
2
where the director is oriented along the vorticity axis, the flow direction, and the velocity gradient, respectively. As
A.D. Rey 403 Theory of linear viscoelasticity of chiral liquid crystals
mentioned above, on length scales smaller than the pitch cholesterics behave as nematics and the above viscosities have meaning only in a local sense. Using the parameters for the low molar mass nematic PAA (de Gennes and Prost, 1993), we find r/a = 0.034, ~/b = 0.056, t/c = 0.092, all in units of poise. Using the parameters for the nematic polymer PBG (Srajer et al., 1988) r/a = 1.74, t/b = 0.37, ~/c = 69.3, all in units of poise, showing the increase in viscous anisotropies as molecular weight increases. In addition the viscosities associated with twist, splay, and bend modes are, respectively, given by:
2 a~ t /T= 71; t/s = 7 1 - a--23; t/B = 7 1 - - - - (9a, b,c)
rib rio
Using the parameters for PAA we find: t /r = 0.067, t/s = 0.067, t/B = 0.015, all in units of poise. Using the parameters for PBG we find: t /T=69.3 , J/S=69.2, t/B = 0.28, all in units o f poise, showing the increase in viscous anisotropies as molecular weight increases.
The two characteristic length scales of the model are the sample width L and the cholesteric half-pitch P0, and, typically, we expect that L ~ > P o. The characteristic relaxation times for the twist mode are:
z - ?~Pq;2 Z'L _ )PlL2 _ N2~ " ( /0a, b)
K22 K22
where z is the intrinsic relaxation time for small local orientation relaxations when the half pitch is P0, and rL is the extrinsic relaxation time in a sample of size L;, N is the number of half-pitches in a sample of length L. Equation(10b) shows that generally rL~>r , and twist relaxation processes will have wide spectrum time scales. Using the parameters for the low molar mass nematic PAA (K22 = 3.8)<10 -6 dynes/cm; )fl = 0.067 poise), L = 5P0 = 15 ~tm, we find rL = 0.396 S and r = 0.0158 s. Us- ing the parameters for the nematic polymer PBG (K22 = 0.78 × 10-7 dynes/cm; )fl -- 67 poise), L = 5 P0 = 15 gin, we find ZL = 19.2 S and r = 0.77 s. On the other hand, the single characteristic time zsb for relaxation of small splay-bend harmonic deformations of period P0 in a cholesteric of half-pitch P0, in the absence of back-flow, is:
71P~ r Kll +K33 r s b - - -; ~ c - - ( l l a , b,c)
(Kll +K33 ) I¢ K22
Equation (11) shows that r~b< z. Using the parameters for PAA, L = 5,P 0 = 15 gin, we find rsb = 0.004 s. Using the parameters for the nematic polymer PBG, L = 5 /to = 15/xm, we find rsb = 0.03 s. The splay-bend relaxa- tion times are significantly smaller than the twist relaxa- tion times. As shown below, in small amplitude oscillatory shear when the helix is oriented along the vor-
ticity axis there is a spectrum of twist modes and hence the viscoelasticity is characterized by a spectrum of twist relaxation times. On the other hand, when the helix is oriented along the flow or velocity gradient direction of the oscillatory shear flow there is a single splay-bend mode of period P0, and hence the viscoelasticity is char- acterized by a single relaxation time.
Linear viscoelasticity of cholesteric liquid crystals
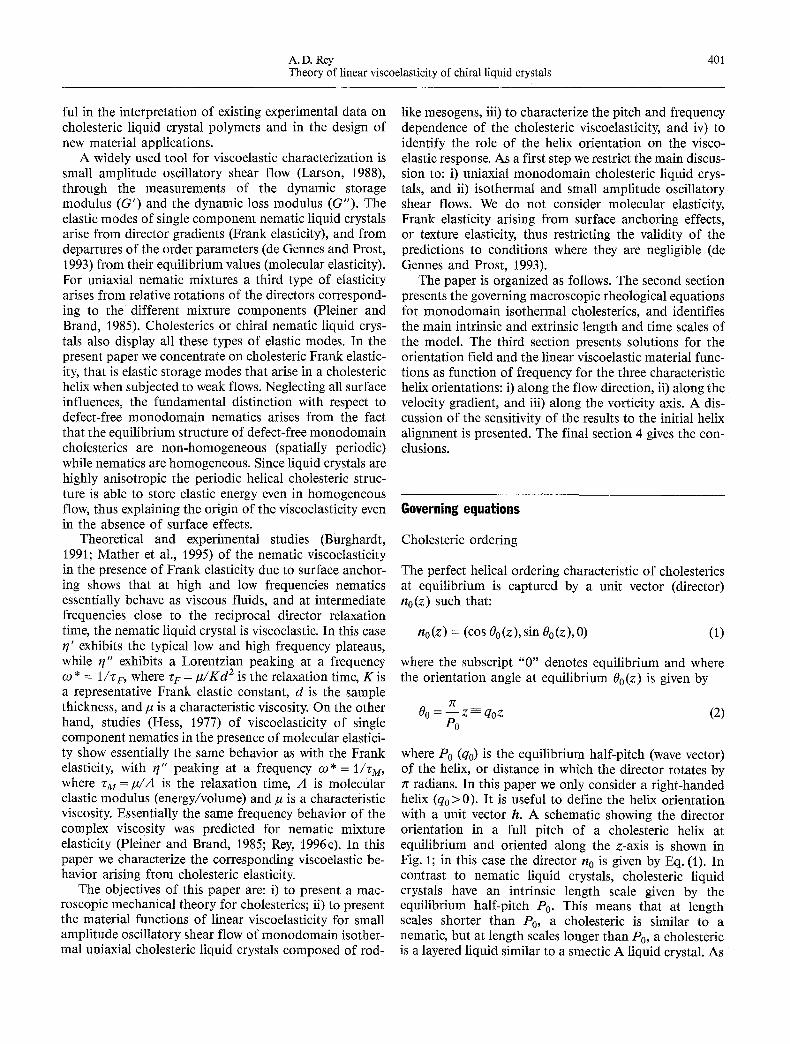
This section presents the predictions of the theory (Eqs. (4)) for small amplitude rectilinear oscillatory shear flow between two parallel plates of single phase uniaxial, incompressible, cholesteric liquid crystals under isother- mal conditions. The three characteristic geometries are defined by the orientation of the helix vector h with respect to the flow direction, and schematics are shown on the left column of Fig. 2. The top schematic shows the helix vector h ~ h f initially aligned to the flow direction, the middle shows the helix vector h =- hg initially aligned along the velocity gradient direction, and the bot tom schematic shows the helix vector h ~ hv aligned along the vorticity axis of the shear flow. The right column of Fig. 2 shows the corresponding elastic modes excited by the
Z
G e o m e t r y M o d e
I I I I I I I I I I splay-bend-twist
X splay-bend
twist
Fig.2 Schematics defining the three characteristic geometries studied in this paper. The geometries, defined by the orientation of the helix vector h with respect to the flow direction, are shown on the left column. The top schematic shows the helix vector h =--hf initially aligned to the flow direction, the middle shows the helix vector h ~ hg initially aligned along the velocity gradient direction, and the bottom schematic shows the helix vector h =---h v aligned along the vorticity axis of the shear flow. The right column shows the corresponding elastic modes excited by the small amplitude oscillatory flow

404 Rheologica Acta, Vol. 35, No. 5 (1996) © Steinkopff Verlag 1996
small amplitude oscillatory flow. Each helix alignment ex- cites different types of elastic modes. In addition, the characteristic steady state shear viscosities for the three cases are different (see Eq. (8)), and therefore each geometry leads to different viscoelastic material func- tions, and must be treated separately.
In what follows we derive the linear viscoelastic mate- rial functions in small amplitude oscillatory shear for isothermal monodomain cholesteric liquid crystals as a function of the helix orientation, using the theory presented above. We assume that the harmonic oscillatory strain OJyx = ~o ei~°t) produces a harmonic stress response (tSyx= tSoeiC°t). Since n = n(z, t) the stress tensor is also a function of (z, t) and to obtaining the linear viscoelastic material functions we average the stress tensor as follows:
1 UP° t ( t )= ~ t ( z , t ) d z (12)
NP0 0
where N P o = L, and L is the sample size. Subsequently, using the standard definition (Bird et al., 1987) for the complex modulus G (tSyx = Gyyx = (G '+ iG")?yx ) we ob- tain expressions for the storage G' and loss modulus G", and for the complex viscosity t/*. We recall that the ex- pressions for the real r/' and imaginary i/" components of the complex viscosity t/* are given by: 0 ' = G"/co and r l"= G'/co. For hg and h v we neglect back-flows. This simplifying assumption leads to tractable analysis, and re- tains all the essential physics. Taking into account back- flows only renormalizes a characteristic viscosity by an amount that is commensurate with the typically very weak back-flow (de Gennes and Prost, 1993).
Helix orientation along the flow direction: hf
The geometry is defined in the top row of Fig. 2. The ini- tial director orientation n o and the velocity v are given by:
no(z) = (cos qoz, sin q0z,0); v = (0,0, ycoxe i°~t) (13)
The imposition of the small amplitude oscillatory shear distorts the director to:
tl x = nOx- - ~ff HOy n (z, t) = ny noy + q/nox (14)
n z ol
where q/is the small twist angle, and a the small tilt angle. The tilt (twist) angle a(~u) represents the splay-bend (twist) mode. Replacing n and v into the torque balance Eq. (4) we find that the governing equation for the splay- bend mode is:
Oa OZ a .r 2 Yl -~- = Kll ~z2-/%a qoa -azYoconox ezC°t (15)
The tilt angle a is given by a (z , t ) = (ar+iai)Yonox el°jr, where
a~) co(r/x) a ~ = - 1 + [co ( r / x ) ] ~;
a~= a(~) [co(r/x)] 2 1 + [co('c/x)] 2
(16)
and K =K11/K22÷K33/K22. Thus the single splay-bend mode that is excited by the flow has a spatial periodicity equal to the cholesteric pitch P0. The maximum ampli- tude of the splay-bend mode occurs when n is parallel to the velocity gradient, while when n is along the flow direc- tion a = 0. In relation to the oscillatory strain, a r is the out-of-phase amplitude, and ai is the in-phase amplitude. The out-of-phase amplitude ar as a function of co shows a single Lorentzian peaking at co * = K/r, and the in-phase amplitude a i as a function of co shows lag-growth satura- tion. At small co the out-of-phase component increases as co, while the in-phase component increases as co2. At large co the out-of-phase component decreases as 1/co, while the in-phase component saturates at a2/~l. If the pitch P0 is infinitely large and the ordering is that of a nematic then a r = 0, and the oscillation is in-phase with the strain. If the pitch is infinitesimally small then a = 0.
The governing equation for the twist angle ~ is:
0~ 02~ ~1 ~ = K22 OZ-'-- ~ - )Pl Yoqo coxeio)t (17)
An approximated solution in the coarse-grained sense is obtained by spatially averaging the velocity, and setting ( x ) = H/2 , where H is the plate separation. This type of approximation is standard in computing cholesteric flows using the Leslie theory (Chandrasekhar, i991). The spatially periodic solution for the twist angle is:
(2n+ 1)rcz- ~ ' (z , t )=n=o ~ gq'+lei°~t sin m - ~ o OSa)
1ff2n+ 1 -- ?°H [ C°TL [1/(2n+ 1)]z
P0(2n+ 1) I +(CO'CL[1/(2n+ I)]2) 2
i (corL[1/(2n+l)]2)2 ] (18b)
The twist mode is multimodal, where the wave-length of the longest mode is NPo. The resonant frequencies are:
* = (2n+l)2/rL. The twist mode is coupled to the CO2n+ I flow through the convection term appearing in the co- rotational derivative M (see Eq. (6a)). Direct examination of the stress tensor (4b) shows that in the linear approx-
A.D. Rey 405 Theory of linear viscoelasticity of chiral liquid crystals
imation the twist mode does not contribute to the linear 101 viscoelastic material functions. The magnitude of P0 .-, affect the amplitude of the twist modes but does not affect rL. ~ 10 °
Replacing the velocity and director field in Eqs. I (4b,4c) gives the expressions for the linear viscoelastic 8~ material functions. In terms of the real t / )and imaginary ~ 10 -1 part t/~ of the complex viscosity t/* we obtain:
(19a) ~" 10"2 I
/7) = t/f(0) q [t/f(C~ )-- t/f(0)] ((.OT/N) 2 1 "Jr- (09 T/I f )2
t / j _ D I ( 0 ) - t /¢(~ )] cor/x
1 -Jr- ((1) T / I f )2 (19b)
where the subscript " f " denotes the helix alignment in the flow direction and where the limiting values are:
t/z(o) - t / j(=) = t/j(o)+ ( t / " - i "] 2 \7, /Y (20)
The zero frequency viscosity t/f(0) is the average steady shear viscosity for the present helix alignment (see Eq. (8)). Recall that for hf no contribution from qb arises since n z -- 0, and thus the average steady shear viscosity in a spatially modulated orientation is just (t/a+ t/e)/2. On the other hand the viscosity at infinitely large fre- quencies is the sum of the average steady viscosity (t/a + t/c)/2 and the following viscosity term arising from the transient reorientation:
(t /8_ 1) t/c a 2 < 0 \ 7 /
(21)
The viscosities appearing in this term can be explained in conjunction with the splay-bend mode a. Recall that the transient and spatially periodic splay-bend mode has zero amplitude when n is along the vorticity axes and maxi- mum amplitude when n is along the velocity gradient. Since the maximum amplitude of the splay-bend mode corresponds to the steady viscosity t/c, this viscosity ap- pears together with 1/B. On the other hand, a grouping of t/s and t/a does not appear because the splay-bend mode has zero amplitude when n is along the vorticity axis. The inequality in Eq. (21) follows from the fact that Yl > 0.
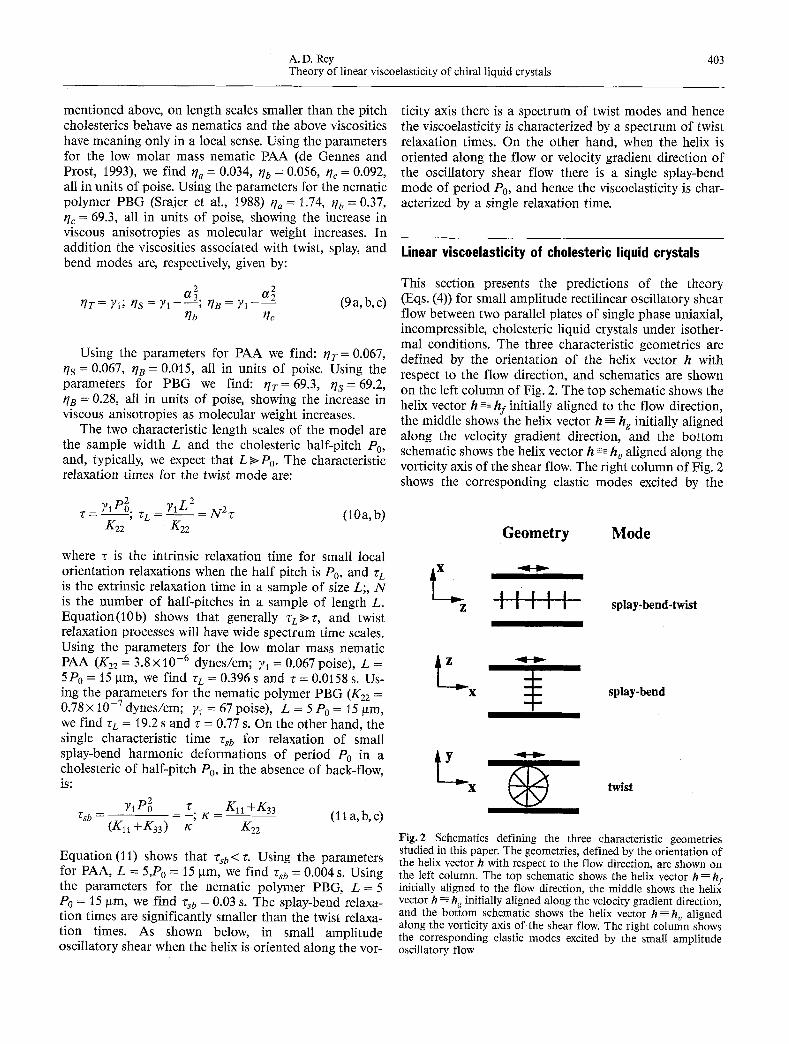
Figure3 shows the scaled real [ t / ) - t / f (0)] / [ t /y(~)- t/f(0)] and imaginary t / j / / [ t /f(0)- t/f(oo )] com- ponents of the complex viscosity t/* as a function of scal- ed frequency co r/K. The figure shows the behavior of a typical viscoelastic material with a single relaxation time. From the figure it follows that the real component of the dynamic viscosity t/) exhibits the typical low and high frequency plateaus, while the imaginary part t/j/peaks at co r /K = 1. The shape of t/j/shows that the cholesteric is
I I I I I I 1
10 2 10 ° 10 2 Scaled Frequency, coxlr~
101
10 ° -.. .-I
10-1 i
-..t
-2 g 10 v
Fig. 3 Scaled real [rff-rlf(O)]/[rlf(Oa)-tlf(O)] and imaginary t/7/[t/f(0)-t/f(¢~)] components of the complex viscosity t/* as a function of scaled frequency 09 r/K, when the helix is aligned along the flow direction (ha.). The figure shows the behavior of a typical viscoelastic material with a single relaxation time. From the figure it follows that the real component of the dynamic viscosity r/) ex- hibits the typical [6] low and high frequency plateaus, while the im- aginary part t/f" peaks at coz/K --1. The shape of r/j shows that the cholesteric is viscous at low nda high scaled frequencies, and viscoelastic at intermediate scaled frequencies. The phase angle q~ = tan- 1 r/j/t/) has a maximum at co* r./tc = 1, indicating the resonant frequency at which elastic storage is most pronounced
viscous at low and high scaled frequencies, and that it is viscoelastic at intermediate scaled frequencies. The im- aginary component of the complex viscosity t/j/ has a maximum at co * r/K = 1, indicating the resonant frequen- cy at which elastic storage is most pronounced. Since r is a function of the pitch P0 the viscoelastic behavior can be tuned by varying the composition or the temperature, two parameters that are known to affect P0. The limiting frequency dependence of t/) and t/j/ can be read from Eqs. (19). In terms of the storage (G' = t/"co) and loss moduli ( G " = t/'co) we find:
lim~o-+0G)= co 2 ; limo,-+0Gj/-- 09 (22a)
limbo-+ = G) = const. ; limo,-~ = G J/~ 09 (22 b)
The frequency dependence of the dynamic modulus and the dynamic viscosity reported here is essentially identical to those computed for single component nematic liquid crystals using Frank elasticity (Burghardt, 1991; Mather et al., 1995), molecular elasticity (Hess, 1977), and binary nematic mixture elasticity models (Rey, 1996c). The effect of the pitch appears through the relaxation time r, and controls the location of the peak in the viscoelastic response on the frequency spectrum. If the pitch P0 is in- finitely large and the ordering is that of a nematic then t / )= t / f (oo ) and t / j /=0 , and the response is purely
406 Rheologica Acta, Vol. 35, No. 5 (1996) © Steinkopff Verlag 1996
viscous. If the pitch is infinitesimally small then t / )= t/f(O), and t / j /= O, and the response is purely viscous. Finally, we note that at small and large frequen- cies the complex viscosity becomes independent of the pitch P0.
Helix orientation along the velocity gradient direction: hg
The geometry is defined in the middle row of Fig. 2. The initial director orientation no and the velocity v are given by:
no(z) = (cos qoz, sin qo,z, 0); v = (ycoxe i~°t, 0, 0) (23)
The imposition of the small amplitude oscillatory shear distorts the director to:
17 x = n o x
n (z, t) = ny = noy l 'lz = O~
(24)
The twist angle q/does not couple to the shear flow. The tilt angle a represents the splay-bend mode. The
governing equation for a is:
O a 0 2 a - 2 71 ~ = Kll ~Z2--K33qo a - a3Yoconox el°ot (25)
Comparing Eqs. (15, 25) we see that the two cases are identical and all equations and conclusions regarding orientation carry over to the present case, if in the expres- sions for a of the previous section a z is replaced everywhere by a3. The maximum amplitude of the splay- bend mode occurs when n is oriented along the flow direction, and that the amplitude is zero when n is oriented along the vorticity axis. Since for rod-like nematic liquid crystals it is always found that l a21 "> t a3 I, the amplitude of splay-bend deformations for hg are much smaller than for h f, thus explaining one important contribution to the decrease in the viscoelastic behavior of hg when compared to h f, as shown below.
The expressions for the linear viscoelastic material functions are:
t/g = t/g(0)+ [t/g ( co ) - t/g(0)l (co'r/K) 2 I -[- (co 2"//£ )2
(26a)
t]~ = [ t /g(0)-- t / g ( ~ ) ] O,)T//£" 1 + (co rlK)Z (26 b)
where the subscript "g" denotes the helix alignment in the velocity gradient direction and where the limiting values are:
t/g(0) = (t/a+t/b); t/g(~) = t/g(0)+ t /s_1 ~- 2
(27 a, b)
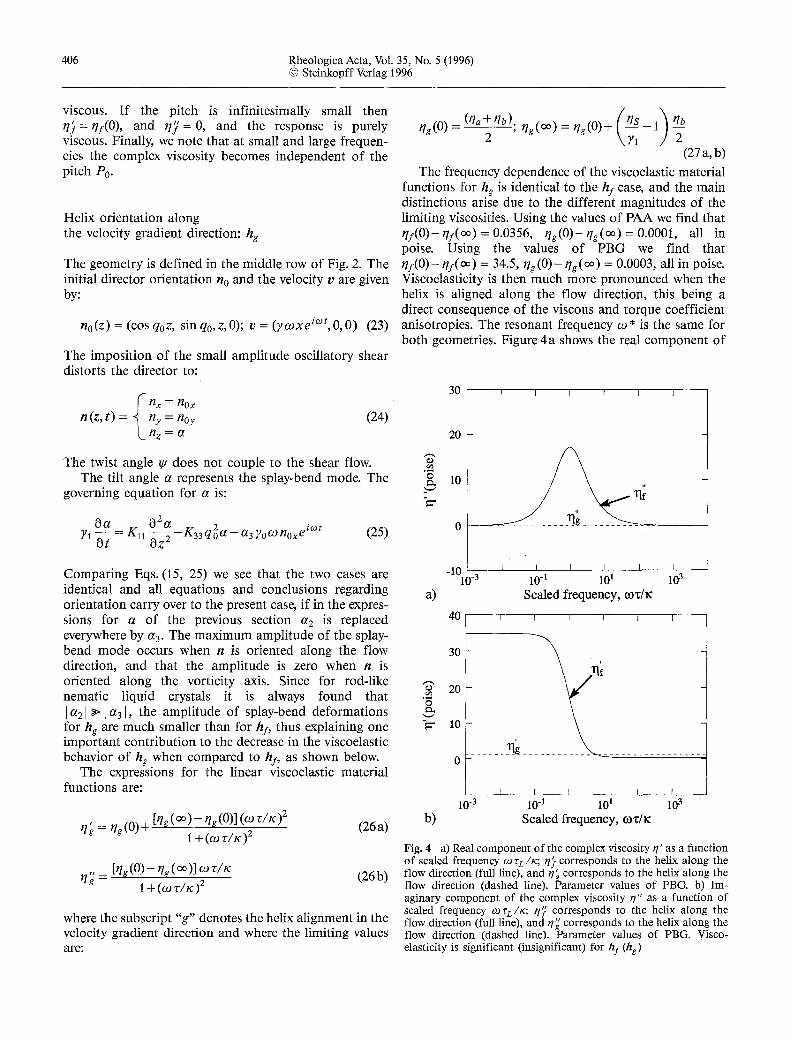
The frequency dependence of the viscoelastic material functions for hg is identical to the h i case, and the main distinctions arise due to the different magnitudes of the limiting viscosities. Using the values of PAA we find that t / f (O)-t / f (oo) = 0.0356, t/g(O)-t/g(OO) = 0.0001, all in poise. Using the values of PBG we find that t/f(0) - t/f(c~) = 34.5, t/g (0 ) - t/g(C~) = 0.0003, all in poise. Viscoelasticity is then much more pronounced when the helix is aligned along the flow direction, this being a direct consequence of the viscous and torque coefficient anisotropies. The resonant frequency co * is the same for both geometries. Figure 4 a shows the real component of
30 m I I I E I I
"8
a)
20
10
-10 10 -3
40
30
I I I f I
10 -x 101 103 Scaled frequency, ¢~/~
"~ 2o O t~
10
I [ I I I I
. . . . . . n _ i _ . . . . . . . . . . . . . . . . .
I I I I [
10-3 10-1 101 103 b) Scaled frequency, mx/~:
Fig. 4 a) Real component of the complex viscosity ~' as a function of scaled frequency co r z/x; q'f corresponds to the helix along the flow direction (full line), and ~/~ corresponds to the helix along the flow direction (dashed line). Parameter values of PBG. b) Im- aginary component of the complex viscosity ~/" as a function of scaled frequency co rL/t¢; qy corresponds to the helix along the flow direction (full line), and r/~ corresponds to the helix along the flow direction (dashed line). Parameter values of PBG. Visco- elasticity is significant (insignificant) for hf (hg)

A. D. Rey 407 Theory of linear viscoelasticity of chiral liquid crystals
the complex viscosity r/' as a function of scaled frequency ¢rL/K, and Fig. 4b the complex component i/" as a func- tion of scaled frequency o)rL/x for the parametric values of PBG.
Helix orientation along the vorticity axis: hv
The geometry is defined in the bot tom row of Fig. 2. The initial director orientation n o and the velocity v are, respectively, given by:
n o ( z ) = (cos qoz , sin qoz , O)
v = ( y c o x e i ~ ° t , o , o )
(28)
(29)
The imposition of the small amplitude oscillatory shear distorts the director to:
/'/x = H0x-- ~//H0y n (z, t ) = ny = rlOy + q/nox (30)
n z = 0
where q/is the small twist angle. The twist angle q/repre- sents the twist mode. Replacing n and v into the torque balance Eq. (4), we find that the twist mode equation is:
Yl --0-7 = K22 ON 2
- y~ yocoe i° ) t (1 - ~ [cos 2qoZ- 2 sin 2qoz ~] ) (31)
A useful approximated solution in the coarse-grained sense is obtained by spatially averaging the irrotational torque term within the parentheses, and replacing it by ( 1 - 2elf). As noted above, these types of approximations are common in computing solutions to cholesteric flows (Chandrasekhar, 1992). The harmonic solution of the twist angle is:
• I (2n+ 1)rcz- ~ ( z , t ) = n = 0 ~ g2"+ae'C°tsin[_ ~ 0 (32 a)
~2n+l -- Yo 2 (1 - 2elf)
rc(2n+l)
¢ ° z L [ 1 / ( 2 n + l ) ] 2
1 + (co rL [1 / (2n + 1)]2) 2
- i- (cozr_[l/(2n_+ 1)]2) 2 .~
1 + (CO rL [1/(2n + 1)]Z)2J (32b)
The twist mode is multimodal, where the wave-length of the longest mode is N P o. The resonant frequencies are:
* = (2n+ 1)2/(rN2). ¢02n+1
Replacing the velocity and director field in Eqs. (4b) gives the expression for the linear viscoelastic material functions. In terms of the real t/; and imaginary part r/~' of the complex viscosity, we obtain:
~ = n~ (0) + [qv ( ~ ) - nv (0)1 n=0
(co zL [1/(2n + 1)]2) 2
(2 n + 1) 2 [1 + (co ZL [1/(2 n + 1)]2) 2] (33a)
n~ = D ~ ( 0 ) - ~ u ( ~ ) ] n=0
(corL [1/(2n + 1)]2) 2
(2n+ 1) 2 [1 q- ((O 2" L [1/(2n + 1)]2)21 (33b)
where the subscript v denotes the helix alignment in the vorticity direction and where the limiting values are:
Y/v(O) -- (r/b q-2//c); r/v(¢O ) =/./v(O ) _ ~22 ~'1 (1 -- ~eff) (34)
The zero frequency viscosity r/v(0 ) is the average steady shear viscosity for the present helix alignment (see Eqs. (8)). Recall that for h v no contribution from r/a arises, and thus the average shear viscosity in a spatially modulated orientation is (t/b + r/c)/2. On the other hand, the viscosity at infinitely large frequencies is the sum of the average steady viscosity and a viscosity term arising from the transient reorientation:
-- (1 --/~eff) ~ < 0 (35) 7"g-
The viscosities appearing in this term can be rationalized in conjunction with the twist mode ~. The transient viscosities associated with the twist mode depend on Yl and a factor involving the reactive parameter 2 = -y2/ )q . The inequality in Eq. (35) is explained by the fact that in the coarse-grained approximation used here 2 is replaced by Xeff, which is the average of 2 cos 2 0 (see the last term in brackets in Eq. (31)), and thus, taking into account that typically ;. ~ 1, we conclude that /],eff <~ 1.
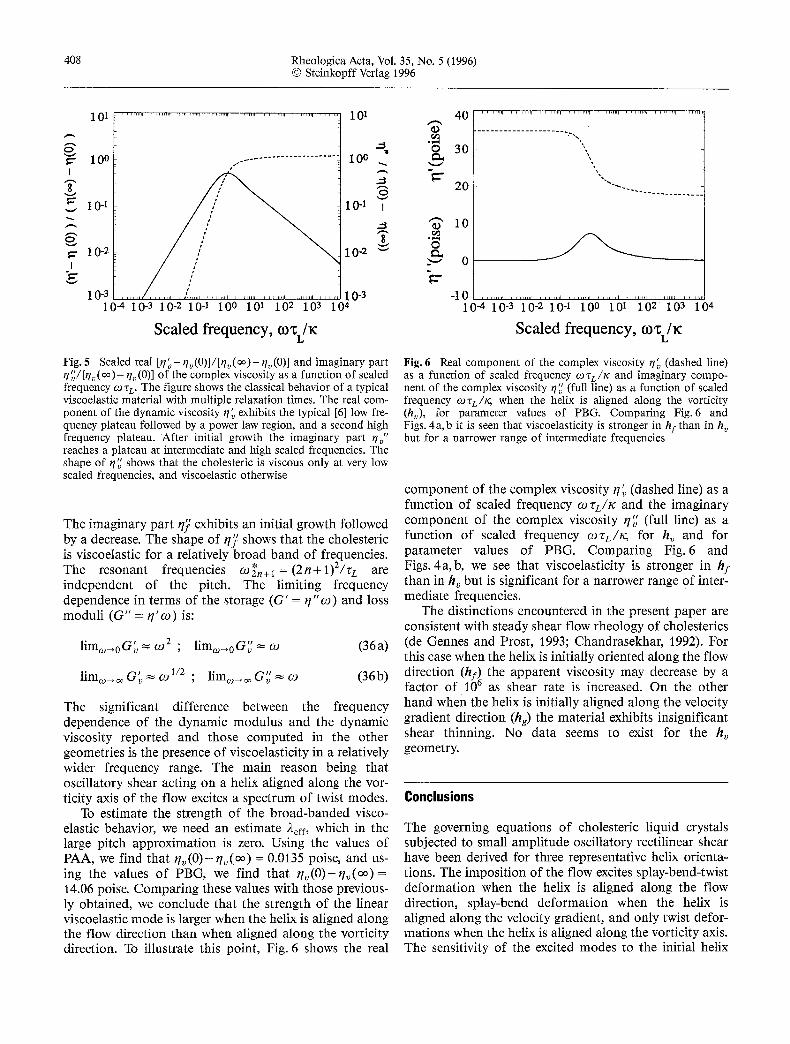
Figure5 shows the scaled real [r / ;- t /u(0)]/ [t/u (co) - r/~ (0)1 and imaginary part t/'~'/[t/~ (oo) - t/~ (0)] of the complex viscosity as a function of scaled frequency cot z, using Eqs. (33) with n = 200. The figure shows the behavior of a typical viscoelastic material with multiple relaxation times (Larson, 1988). From the figure we can deduce that the real component of the dynamic viscosity r/j~ exhibits the typical low frequency plateau followed by a power law region, and a second high frequency plateau.
408 Rheologica Acta, Vol. 35, No. 5 (1996) © Steinkopff Verlag 1996
101 1 0 1 . . . . ' , , , , i . . . . . . . . i . . . . . . . ,~ , , , * , . , , . . . . . . . . E . . . . . . . . , . . . . . . . . i , , , , , . 1
v 10 o . . . . . . . . . . . . . . . . . . . . . . . : I0O I
10 -1 104 t
~- 10-2 I
10-3 . . . . . . . . . . . 10-3 10-4 10-3 10-1 10-1 100 101 102 103 104
Scaled frequency, m'~L/~:
Fig. 5 Scaled real [rl v - r lv(O)]/[r lv( ) - r/~(0)l and imaginary part rl ~ / [ r l v ( ~ ) - f l y (0)] of the complex viscosity as a function of scaled frequency co r L. The figure shows the classical behavior of a typical viscoelastic material with multiple relaxation times. The real com- ponent of the dynamic viscosity r/~ exhibits the typical [6] low fre- quency plateau followed by a power law region, and a second high frequency plateau. After initial growth the imaginary part r/v" reaches a plateau at intermediate and high scaled frequencies• The shape of r/~ shows that the cholesteric is viscous only at very low scaled frequencies, and viscoelastic otherwise
Z 1 0 -2 ""
The imaginary part t/y exhibits an initial growth followed by a decrease. The shape of t/y shows that the cholesteric is viscoelastic for a relatively broad band of frequencies.
* = (2n+ 1)2/'CL are The resonant frequencies coZn+l independent of the pitch. The limiting frequency dependence in terms of the storage (G ' = t/"co) and loss moduli ( G " = r/'co) is:
• ' ; l l m c o _ ~ 0 G v = co (36a) llm<o_~o G v ~ O 3 2 • .
llmco_~ ~ Gv c o 1 / 2 • t t • ' ~ ; l lmo~ ~ G v - 09 (36b)
The significant difference between the frequency dependence of the dynamic modulus and the dynamic viscosity reported and those computed in the other geometries is the presence of viscoelasticity in a relatively wider frequency range. The main reason being that oscillatory shear acting on a helix aligned along the vor- ticity axis of the flow excites a spectrum of twist modes.
To estimate the strength of the broad-banded visco- elastic behavior, we need an estimate 2eff, which in the large pitch approximation is zero. Using the values of PAA, we find that r l v ( O ) - r l v ( O o ) = 0•0135 poise, and us- ing the values of PBG, we find that t / v ( 0 ) - t / ~ ( ~ ) = 14.06 poise. Compar ing these values with those previous- ly obtained, we conclude that the strength of the linear viscoelastic mode is larger when the helix is aligned along the flow direction than when aligned along the vorticity direction. To illustrate this point, Fig. 6 shows the real
~D r ~
° , . . ,4
g~
0 , ....... , ........ , . . . . ,..,, ........ , ........ , . ..,,,,., . .,.....L ..... ,
30
. . . . . . . . . . . . . . . . . . . . . .
" , \
20
, , , , . , , i , , , J . . l l , i , , , , , , i , . . . . . . , i , , , , , , , , i , , , , , , , , i , , , , ,
1 0 -1 1 0 -1 1 0 0 101 1 0 1 1 0 3
Scaled frequency, ml:L/~:
~) 10 . , . . ~
o
.'---- 0
-10 ........ , 10-4 10-3 04
Fig. 6 Real component of the complex viscosity r/v (dashed line) as a function of scaled frequency corL/t¢ and imaginary compo- nent of the complex viscosity q ~' (full line) as a function of scaled frequency corL/x, when the helix is aligned along the vorticity (hv ) , for parameter values of PBG. Comparing Fig. 6 and Figs. 4a, b it is seen that viscoelasticity is stronger in h f than in h v but for a narrower range of intermediate frequencies
component of the complex viscosity t/~ (dashed line) as a function of scaled frequency co zL/~c and the imaginary component of the complex viscosity t/;' (full line) as a function of scaled frequency CO r L / X , for hv and for parameter values of PBG. Comparing Fig. 6 and Figs. 4a, b, we see that viscoelasticity is stronger in h i
than in hv but is significant for a narrower range of inter- mediate frequencies.
The distinctions encountered in the present paper are consistent with steady shear flow rheology of cholesterics (de Gennes and Prost, 1993; Chandrasekhar, 1992). For this case when the helix is initially oriented along the flow direction ( h i ) the apparent viscosity may decrease by a factor of 106 as shear rate is increased. On the other hand when the helix is initially aligned along the velocity gradient direction ( h g ) the material exhibits insignificant shear thinning• No data seems to exist for the hv geometry.
Conclusions
The governing equations of cholesteric liquid crystals subjected to small amplitude oscillatory rectilinear shear have been derived for three representative helix orienta- tions. The imposition of the flow excites splay-bend-twist deformation when the helix is aligned along the flow direction, splay-bend deformation when the helix is aligned along the velocity gradient, and only twist defor- mations when the helix is aligned along the vorticity axis. The sensitivity of the excited modes to the initial helix

A.D. Rey 409 Theory of linear viscoelasticity of chiral liquid crystals
orientat ion is reflected in the linear viscoelastic functions for small ampli tude oscillatory shear. It is found that when the helix is aligned along the flow direction, cholesteric viscoelasticity is relatively strongest and only exists at intermediate frequencies. When the helix is aligned along the vorticity direction cholesteric visco- elasticity is significant in a relatively broader range o f in- termediate frequencies. Finally, when the helix is aligned along the velocity gradient direction, the chotesteric viscoelasticity is insignificant and only exists in a narrow band o f frequencies. The driving force between the sen- sitivity o f the viscoelastic response to the initial helix
orientat ion is found to be the anisotropy in viscosities and torque coefficients, and in the type o f elastic modes ex- cited by the oscil latory shear. The cholesteric pitch con- trois the locat ion o f viscoelastic region on the frequency spectrum, and only when the helix is not oriented along the vorticity axis.
Acknowledgements This work is supported by a grant from the Natural Science and Engineering Research Council of Canada. The author wishes to thank the McGill Computer Center for a grant to defray the computational costs of this research. The help of A. E Singh in producing Fig. 5 is gratefully acknowledged.
References
Burghardt WR (1991) Oscillatory shear flow of nematic liquid crystals. Journal of Rheology 35:49-62
Chandrasekhar S (1992) Liquid crystals, 2nd edn. Cambridge University Press, Cambridge
de Gennes PG, Prost J (1993) The physics of liquid crystals, 2nd edn. Clarendon Press, Oxford
Derfel G (1983) Shear flow induced cholesteric-nematic transition. Mol Cryst Liq Cryst (Letters) 92:41
Guido S, Grizzuti N (1995) Phase separa- tion effects in the rheology of aqueous solutions of hydroxypropylcellulose. Rheol Acta 34:137-146
Hess S (1977) Dynamic viscosity of macro- molecular liquids for a superposition of static and oscillating velocity gradients. Physica 87A:273-287
Hongladarom K, Secakusuma V, Burghardt WR (1994) Relation between molecular orientation and rheology in lyotropic hydroxypropylcellulose solutions. J Rheol 38:1505-1523
Kini UD (1979) Shear flow of cholesterics normal to the helical axis. J de Physique 40, C 3:62- 65
Larson RG (1988) Constitutive equations for polymer melts and solutions. Butter- worths, Boston
Leforestier A, Livolant F (1992) Distortion of DNA cholesteric liquid crystal quenched at low temperature: geome- trical analysis and models. J Phys II France 2:1853-1880
Leslie FM (1969) Continuum theory o f cholesteric liquid crystals. Mol Cryst Liq Cryst 7:407-420
Leslie FM (1979) The theory of flow phenomena in liquid crystals. Adv Liq Cryst 4:1-81
Marrucei G (1991) Rheology of nematic polymers. In: Ciferri A (ed) Liquid crys- tallinity in polymers. VCH Publishers, New York, 395-422
Mather PT, Pearson DS, Burghardt WR (1995) Structural response of nematic liquid crystals to weak transient shear flows. Journal of Rheology 39:627- 648
Pleiner H, Brand HR (1985) Macroscopic behavior of a biaxial mixture of uniaxial nematics versus hydrodynamics of a biaxial liquid crystal. J de Physique 46:615-620
Rey AD (1996a) Flow-alignment in the helix uncoiling of cholesteric liquid crystals. Phys Rev E 53:4198-4201
Rey AD (1996b) Structural transformations and viscoelastic response of sheared fingerprint cholesteric textures. J Non- Newt F1 Mech, in press
Rey AD (1996c) Theory of linear visco- elasticity for single phase nematic mix- tures. Mol Cryst Liq Cryst 281:155-170
Searamuzza N, Carbone V (1988) in: Khoo I-C, Simon F (eds) "Physics of liquid crystalline materials", 517-532. Gor- don and Breach Science Publishers, Philadelphia
Srajer G, Fraden S, Meyer RB (1988) Field- induced nonequilibrium periodic struc- tures in nematic liquid crystals: non- linear study of the twist Frederiks transi- tion. Phys Rev A 39:4828
Sriuivasarao M (1995) Rheology and Rheo- optics of polymers liquid crystals. Inter- national Journal of Modern Physics B 9:2515 -2572
Walker L, Wagner N (1994) Rheology of region I flow in a lyotropic liquid-crystal polymer: the effect of the defect texture. J of Rheol 38:1525-1547