target detection and reduction of interrupting signals in
TRANSCRIPT
بسى هللا انزح انزحى
Sudan University of Science and Technology
College of Graduate Studies
Target Detection and Reduction of Interrupting
Signals in Coherent MIMO Radar
المترابط في الرادار اإلشارات المقاطعة إكتشاف الهذف والحذ من
عذد المذخالت و المخرجات مت
A Thesis Submitted in Partial Fulfillment of the Requirements for the
Degree of M.Sc.in Electronic Engineering (Communications Engineering)
Prepared by:
Ali Omer Mohamed Aldow
Supervised by:
Dr. Fath-Elrahman Ismael Khalifa
January 2017
I
األــ
بسم هللا الرحمن الرحيم
قال هللا تعالي:
مات رب لنفد البحر قبل أن تنفد قل لو كن البحر مدادا لك
مات رب ولو جئنا بمثل مددا ما أن بش مثلك )901(ك هقل ا
ل واحد فمن كن ير لهك ا
ما ا ل أه
جوا لقاء ربه فليعمل عال يوح ا
(110)صالحا ول يشك بعبادة ربه أحدا
صدق هللا العظيم
سوره الكهف
II
Dedication
To My Family..…
III
ACKNOWLEDGEMENT
I thank god (ALLAH) for giving me the endurance and
perseverance to complete this work.
I am truly indebted and thankful to my supervisor Dr.
Fath-Elrahman Ismael Khalifa for his suggestions,
criticism and guidance throughout the thesis work.
I could not complete this work without the continuous
support of my family; I would like to give special thanks
to my family.
I am very thankful to my friend: Ahmed Nidal Ahmed
Nour-Eldeen for his constructive comments and
supporting in pursuing this work.
IV
ABSTRACT
In Multiple Input Multiple Output (MIMO) Radar every antenna element
transmits different waveforms, these waveform diversity enhanced MIMO
Radar system dramatically. Coherent MIMO radar array elements are close
enough so that every element sees the same target radar cross section
(RCS). The target response is mainly interrupted by the unwanted signals
(Noise, Clutter, and Jamming) associated with receiving signal that
degrades Probability of detection as well as performance of MIMO radar
system degrades. This thesis is proposed to eliminate unwanted part of the
receiving signals and evaluate the probability of detection at the receiver of
Coherent MIMO Radar; signal processing algorithm namely Space Time
Adaptive Processing (STAP) based on MATLAB was used to meet the
main objectives of this project. The simulation results show that PoD in
Coherent MIMO radar could be enhanced when Space Time Code (STC) is
used. This enhancement could be presented by significant improvement on
PoD by 19%.Furthermore, in lower SNR case, PoD could be improved by
reducing interrupting signals when STAP is used.
V
المستخلص
اثانائ يصزػ اث, أجخزان ةيخؼذد الث ذخان ةيخؼذد انزادارانذ ؼخذ ػه ائاث ف
حس ي ادائت ظاو انزادار اثانج ف اشكال ذا انخعي انجاث, يخخهفت أشكال زسمح
انخزابظ يخؼذد انذخالث زاداريصففت انػاصز يخؼذد انذخالث انخزجاث بشكم كبز.
. نهذف انؼزض انزادار قطغانانكفات بحذ كم ػصز ز فس قزبت با فخزجاث ان
انسخقبهت شارةباإليزحبطت شاراث أخز إػ طزق خى يقاطؼخا سخجابت انذفحذ أ إ
انكشف تحخانيا ؤد ان حقهم إخشش( ان ,انضجت ,يزغب فا )انضضاءغز اثإشار
قخزحج ذ األطزحت يخؼذد انذخالث انخزجاث. إ زادارظاو ان ئتأدا باإلضافت إن انخقهم ي
انكشف ف تحقى احخانباالضافت ان شارة انسخقبهت اإلزغب ف ي انجشء غز اننهقضاء ػه
ذ أذاف نخحقق, خزابظ يخؼذد انذخالث انخزجاثانزادار ان م يسخقبان طزف ات
. انحست( ة )خارسيت يؼانج انشيا انحشيؼانجت اإلشار تسخخذاو خارسياألطزحت حى إ
انخاسك يخؼذد انزادار ف حخانت انكشفأ اباسخخذاو بزايج انحاكاة ياحالب خائج حشز ان
حذ ؼكس , اسخخذاو ػه حزيش انقج انحش ػذا حؼششك انذخالث انخزجاث
اخفاضحضح انخائج أ ف حانت كا ,%91 بسبت إحخان انكشف ف سادة كبز انخحس ان
ؤد ان انحست خارسيت يؼانج انشيا انكا اسخخذاوسبت اإلشار إان انضضاء فئ
.انقاطؼت انذ بذر أحذد ححس ف احخانت انكشفاث ي اإلشارانحذ انخقهم
VI
Table of Contents
I ................................................................................................................. األــ
Dedication ..................................................................................................... II
ACKNOWLEDGEMENT .......................................................................... III
ABSTRACT ................................................................................................ IV
V ......................................................................................................... انسخخهص
Table of Contents ........................................................................................ VI
List of Figures ............................................................................................... X
List of Abbreviations ................................................................................. XII
List of symbols ......................................................................................... XIII
Chapter One: Introduction ......................................................................... 1
1.1 Preface ............................................................................................... 2
1.2 Problem Statement ............................................................................ 4
1.3 Proposed Solution .............................................................................. 4
1.4 Motivation ......................................................................................... 4
1.5 Objectives .......................................................................................... 5
1.6 Methodology ..................................................................................... 5
1.7 Thesis Outlines .................................................................................. 5
VII
Chapter Two: Literature Review ............................................................... 6
2.1 Introduction ....................................................................................... 7
2.2 MIMO Radar ..................................................................................... 7
2.2.1 Statistical MIMO ............................................................................ 9
2.2.2 Coherent MIMO ............................................................................. 9
2.2.3 Target Detection Phenomenon of MIMO Radar ......................... 11
2.3 Interrupt Signal in MIMO Radars ................................................... 12
2.3.1 Noise ............................................................................................. 12
2.3.2 Clutters ......................................................................................... 13
2.3.3 Jammers ........................................................................................ 15
2.3.3.1 Barrage Jammer ..................................................................... 15
2.3.3.2 Spot Jammer ........................................................................... 15
2.3.3.3 Sweep Jammer ....................................................................... 16
2.4 Doppler Shift ................................................................................... 16
2.5 Related Works ................................................................................. 18
Chapter Three: Coherent MIMO Radar ................................................. 20
3.1 Introduction ..................................................................................... 21
3.2 Coherent MIMO Radar ................................................................... 21
3.3 Coherent MIMO RADAR with STC Waveforms ........................... 25
3.4 Space Time Adaptive Processing .................................................... 27
3.4.1 Signal Only ................................................................................... 33
3.4.2 Interference Only .......................................................................... 34
3.4.3 Correlated Interference – SINR ................................................... 35
3.4.4 MIMO Radar STAP ..................................................................... 36
VIII
Chapter Four: Simulation and Results .................................................... 37
4.1 Introduction ..................................................................................... 38
4.2 Coherent MIMO Radar ................................................................... 38
4.2.1 Coherent MIMO Radar without STP for variable .................. 39
4.2.2 Coherent MIMO Radar without STP for variable ................. 40
4.2.3 Coherent MIMO Radar with STP variable ............................. 41
4.2.4 Coherent MIMO Radar with STP variable ............................ 42
4.2.5 Comparison between Coherent MIMO Radar with and without
STP 44
4.3 Coherent MIMO Radar using STAP ............................................... 45
4.3.1 Total Return Spectrum before STAP Detection .......................... 45
4.3.2 Detection of Target and Jammer by STAP and Removal of Clutter
47
4.3.3 Detection of Target by STAP, Removal of Clutter and Jammer . 48
Chapter Five: Conclusion and Recommendations ................................. 50
5.1 Conclusion ....................................................................................... 51
5.2 Recommendations ........................................................................... 51
References ................................................................................................... 52
Appendices .................................................................................................. 54
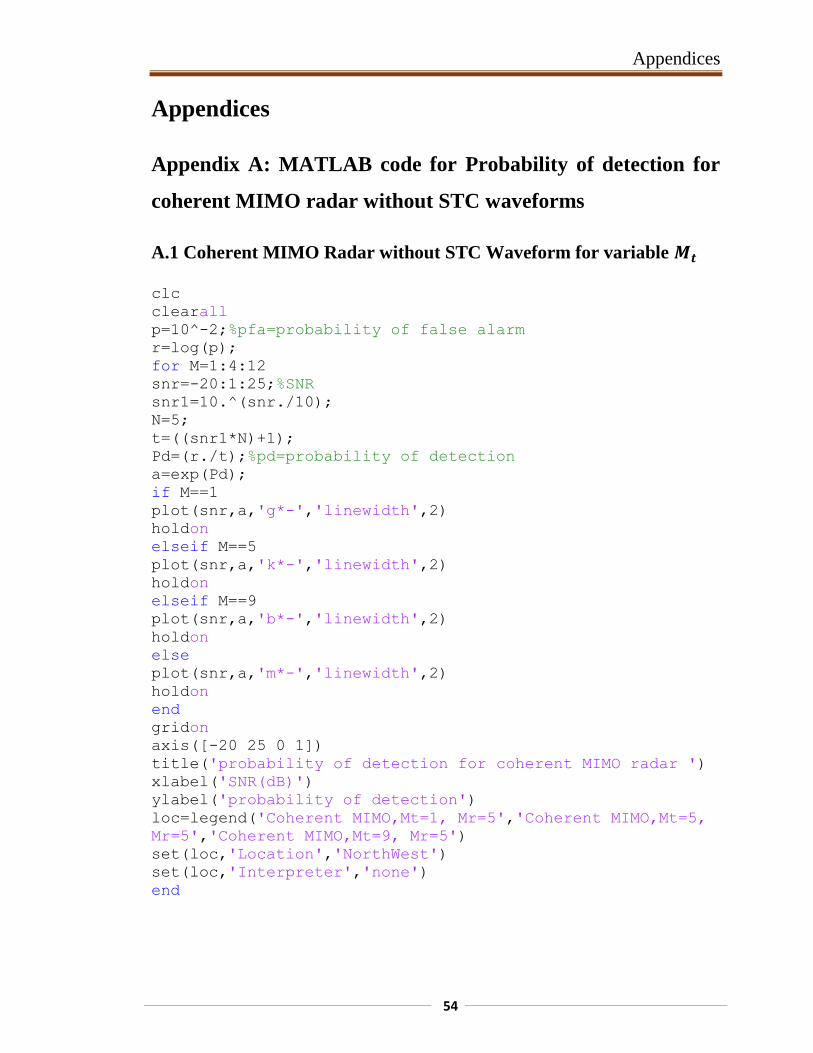
Appendix A: MATLAB code for Probability of detection for coherent
MIMO radar without STC waveforms ..................................................... 54
A.1 Coherent MIMO Radar without STC Waveform for variable .. 54
A.2 Coherent MIMO Radar without STC Waveform for variable . 55
IX
Appendix B: MATLAB code for Probability of detection for coherent
MIMO radar with STC waveforms ........................................................... 56
B.1 Coherent MIMO Radar with STC Waveform for variable ....... 56
B.2 Coherent MIMO Radar without STC Waveform for variable .. 57
Appendix C: MATLAB code for comparison between Coherent MIMO
Radar with and without STC Waveform .................................................. 58
Appendix D: MATLAB Code for removing the interference from the total
return signal using STAP .......................................................................... 59
X
List of Figures
Figure 1.1: Radar System Concept. ............................................................... 2
Figure 1.2 : MIMO Radar System concepts. ................................................. 3
Figure 2.1 : Receiver Structure of MIMO Radar. .......................................... 8
Figure 2.2 : radar environment ..................................................................... 12
Figure 2.3 : Type of Clutter (Sea, Ground, Rain, Birds) ............................. 13
Figure 3.1 : Coherent MIMO Radar Configuration. .................................... 21
Figure 3.2 : STC MIMO Radar Configuration. ........................................... 26
Figure 3.3 : The problem is to detect the target by enhancing radar
performance in this environment of interference. ........................................ 28
Figure 3.4 : The space-time adaptive processing (STAP) typically
performed in one radar coherent processing interval. ................................. 29
Figure 3.5 : Top-level diagram for the STAP 2-D adaptive filter ............... 32
Figure 4.1 : Probability of Detection plotted against SNR for Coherent
MIMO Radar without space time processing for variable Mt and constant
Mr. ................................................................................................................ 39
Figure 4.2 : Probability of Detection plotted against SNR for Coherent
MIMO Radar without space time processing at variable Mr and constant
Mt. ................................................................................................................ 40
Figure 4.3 : Probability of Detection plotted against SNR with space time
processed Coherent MIMO Radar varying number of transmitters, Mt and
constant Mr. ................................................................................................. 42
Figure 4.4 : Probability of Detection Plotted against SNR for STC Coherent
MIMO Radar at variable Mr ........................................................................ 43
Figure 4.5 : Comparison of Probability of Detection between with and
without Space Time Processing ................................................................... 44
XI
Figure 4.6 : Total return spectrum at the receiver end with target, clutter,
noise and jammer, before STAP detection. ................................................. 46
Figure 4.7 : 3-D plot of total return spectrum at the receiver end with target,
clutter, noise and jammer, before STAP detection. ..................................... 46
Figure 4.8 : STAP detection; removal of clutter and noise while target &
jammer remains. ........................................................................................... 47
Figure 4.9 : 3-D plot of STAP detection; removal of clutter and noise while
target & jammer remains. ............................................................................ 48
Figure 4.10 : Output of STAP processor. Target remain; jammer and clutter
ridge returns have been removed ................................................................. 49
Figure 4.11 : 3-D plot of Output of STAP processor. Target remains;
jammer and clutter ridge returns have been removed. ................................. 49
XII
List of Abbreviations
1D One dimension
2D Two dimension
3D Three dimension
ECM Electronic Countermeasures
CPI Coherent Processing Interval
MATLAB Matrix laboratory
MIMO Multiple Input Multiple Output
OFDM Orthogonal Frequency Division
Multiplexing
RADAR Radio Detection and Ranging
SCNR Signal-to-Clutter-plus-Noise Ratio
SCR Signal-to-Clutter Ratio
SIMO Single Input Multiple Output
SIR Signal-to-Clutter+Noise-Ratio
STC Space Time Coding
STP Space Time Processing
STAP Space Time Adaptive Processing
XIII
List of symbols
Signal at target location
clutter area
Total average transmitted energy
complex noise vector
number of receiver array elements
number of transmit array elements
probability of detection
probability of false alarm
peak transmitted power
Received clutter only covariance matrix
Received jamming only covariance matrix
Received noise only covariance matrix
effective noise temperature
Noise voltage
Output of linear array
Received baseband signal by k-th transmit
antenna
XIV
Radar carrier frequency
complex vector
complex vector
Direction of target respect to receive array
clutter scattering coefficient
average clutter RCS
target RCS
time delay common to all transmit elements
time delay between the target and m-th
transmit antenna
kronecker product
H channel matrix
X space-time snap-shot of the input data
Radar operating bandwidth
Receiver noise figure
Received interference vector
Boltzman’s constant
Noise signal
XV
Total interference covariance matrix
STAP adaptive weight matrix
Optimal Input Detector
Output of STAP detector
Receive steering vector
Number of transmit space time coded
Transmit signal vector
Transmit steering vector
Direction of target respect to transmit array
Wavelength
Time delay
Chapter One
Introduction
Chapter One Introduction
2
1.1 Preface
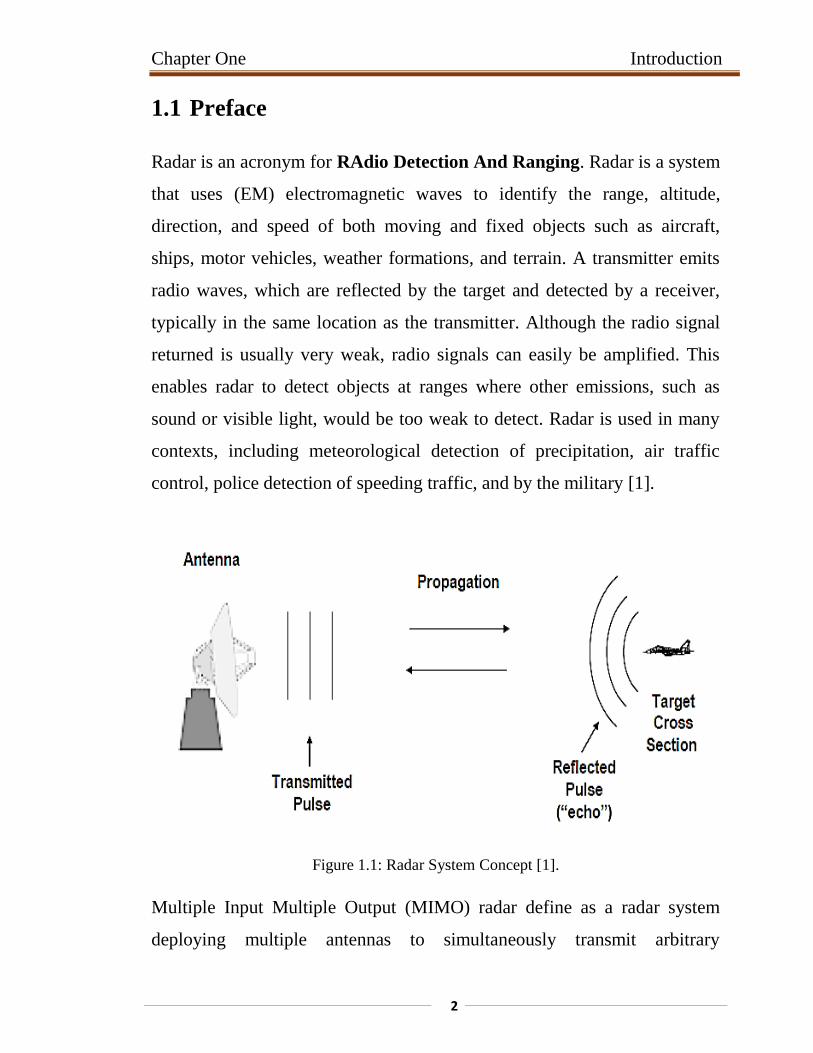
Radar is an acronym for RAdio Detection And Ranging. Radar is a system
that uses (EM) electromagnetic waves to identify the range, altitude,
direction, and speed of both moving and fixed objects such as aircraft,
ships, motor vehicles, weather formations, and terrain. A transmitter emits
radio waves, which are reflected by the target and detected by a receiver,
typically in the same location as the transmitter. Although the radio signal
returned is usually very weak, radio signals can easily be amplified. This
enables radar to detect objects at ranges where other emissions, such as
sound or visible light, would be too weak to detect. Radar is used in many
contexts, including meteorological detection of precipitation, air traffic
control, police detection of speeding traffic, and by the military [1].
Figure 1.1: Radar System Concept [1].
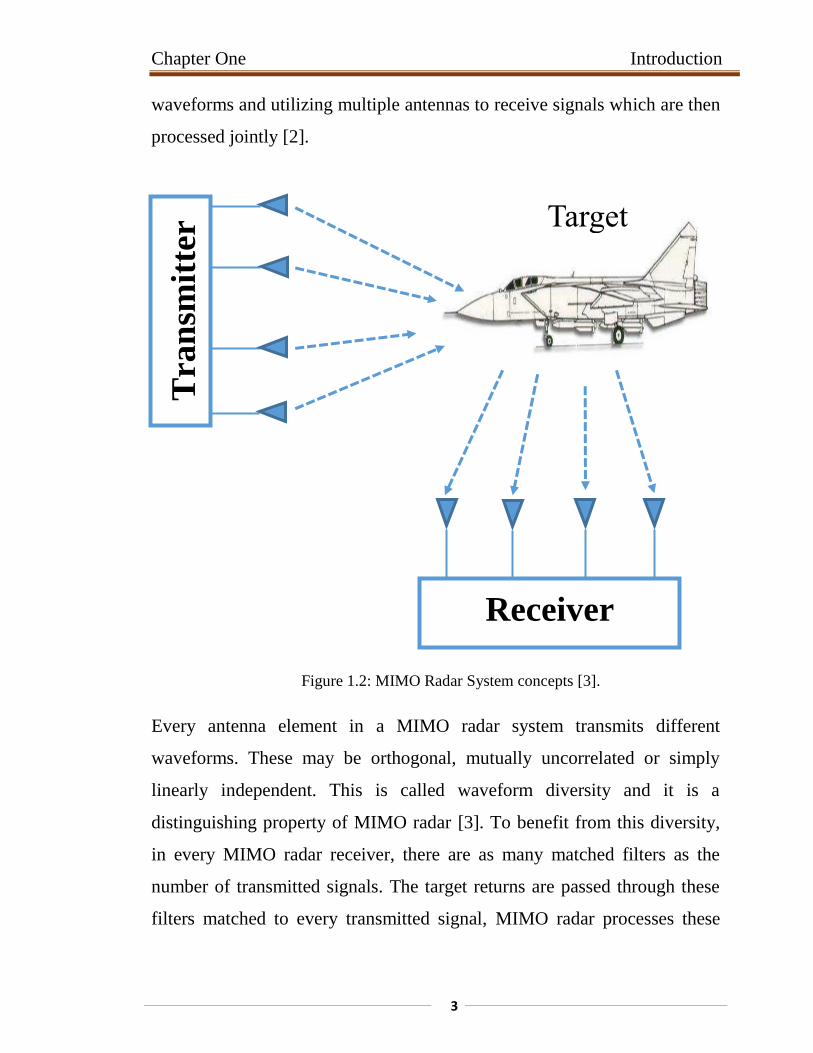
Multiple Input Multiple Output (MIMO) radar define as a radar system
deploying multiple antennas to simultaneously transmit arbitrary
Chapter One Introduction
3
waveforms and utilizing multiple antennas to receive signals which are then
processed jointly [2].
Figure 1.2: MIMO Radar System concepts [3].
Every antenna element in a MIMO radar system transmits different
waveforms. These may be orthogonal, mutually uncorrelated or simply
linearly independent. This is called waveform diversity and it is a
distinguishing property of MIMO radar [3]. To benefit from this diversity,
in every MIMO radar receiver, there are as many matched filters as the
number of transmitted signals. The target returns are passed through these
filters matched to every transmitted signal, MIMO radar processes these
Target
Tra
nsm
itte
r
Receiver
Chapter One Introduction
4
outputs jointly to decide a target is present or not. Coherent MIMO radar
uses antenna arrays for transmitting and receiving signals and every antenna
element of Coherent MIMO radar sends different waveforms. Separation
between the array elements is important point in coherent MIMO radar is
that the array elements are close enough so that every element sees the same
aspect of the target i.e. the same radar cross section (RCS) [4].
1.2 Problem Statement
High probability of detection is very important parameter for locating the
target with high accuracy; it can also vary with environment, many
undesired signals like (noise, clutter, and jamming) can interrupt the main
target reflected signals, Interrupting signals (noise, clutter, and jamming)
reduces probability of detection as well as signal to noise ratio (SNR). So
performance of MIMO radar degrades.
1.3 Proposed Solution
The study is focused to eliminated unwanted part (noise, clutter, and
jamming signals) of the receiving signal and evaluated the probability of
detection at the receiver end of Coherent MIMO Radar using signal
processing algorithms namely Space Time Adaptive Processing (STAP).
1.4 Motivation
By taking the benefit of spatial diversity, MIMO Radar system performance
can be dramatically enhanced. The target deep fading or scintillation
problem degrades the performance of Coherent MIMO Radar is overcame
by taking the advantage of STAP. By applying the algorithm of coherent
Chapter One Introduction
5
MIMO radar can be eliminated noise, clutter and jamming signals and the
probability of target detection as well as the diversity gain can be improve.
1.5 Objectives
The main objective of this thesis is to;
Analyze Probabilities of target detection performances for Coherent
MIMO Radar
Reducing the noise, clutter, and jamming signals at the receiver end
by making use of Space Time Adaptive Processing algorithm.
1.6 Methodology
A MATLAB code is used to simulate and analyze the detection of target in
Coherent MIMO Radar System. Simulate Probability of detection (PoD)
against Signal-to-Noise-Ratio (SNR) without STC and then simulate the
PoD against SNR with STC. Applying STAP algorithm in Coherent MIMO
Radar to reducing interrupting signals (noise, clutter, and jamming).
1.7 Thesis Outlines
The rest of this thesis is organized as follow:
Chapter two: provide a literature review of Coherent MIMO radar beside
give an idea of interrupting signals (noise, clutter, and jamming), Chapter
three: layout the methodology of using STAP in Coherent MIMO Radar,
Chapter four: presents the simulation and discuss the results, Chapter
five: concludes the thesis and provides recommendations of the future
work.

Chapter Two
Literature Review
Chapter Two Literature Review
7
2.1 Introduction
The concept of a multiple input multiple output (MIMO) radar system was
first proposed in 2004 in [5]. Since then, substantial research has been
conducted on the concept. Beside the multiple inputs multiple outputs
architecture, the idea of MIMO starts from diversity [6]. According to
diversity, receiving antenna elements should receive different information
and then improve the global performance of the system.
This thesis mainly described the Coherent mode of MIMO Radar and the
STAP for increasing the diversity gain at both transmitting and receiving
end [7]. If transmitters of the Coherent MIMO Radar are transmits space
time processed signal then at the receiving end target responses are detected
fast with lower SNR value. The target response is mainly interrupted by the
unwanted signal (Noise, Clutter and Jammer) associated with receiving
signal [8].
2.2 MIMO Radar
Multiple-input multiple-output (MIMO) radar is a relatively a new term for
a radar field which has been inspired by the MIMO technique in
communications. MIMO radar has multiple transmit channels and multiple
receive channels, and the transmit channels can be separated by waveforms,
or time, or frequencies, or polarizations at each receiver. Every antenna
element in a MIMO radar system transmits different waveforms. These may
be orthogonal, mutually uncorrelated or simply linearly independent. This is
called waveform diversity and it is a distinguishing property of MIMO
radar. Correlation of waveforms may also be allowed to some degree for
some applications [4].
Chapter Two Literature Review
8
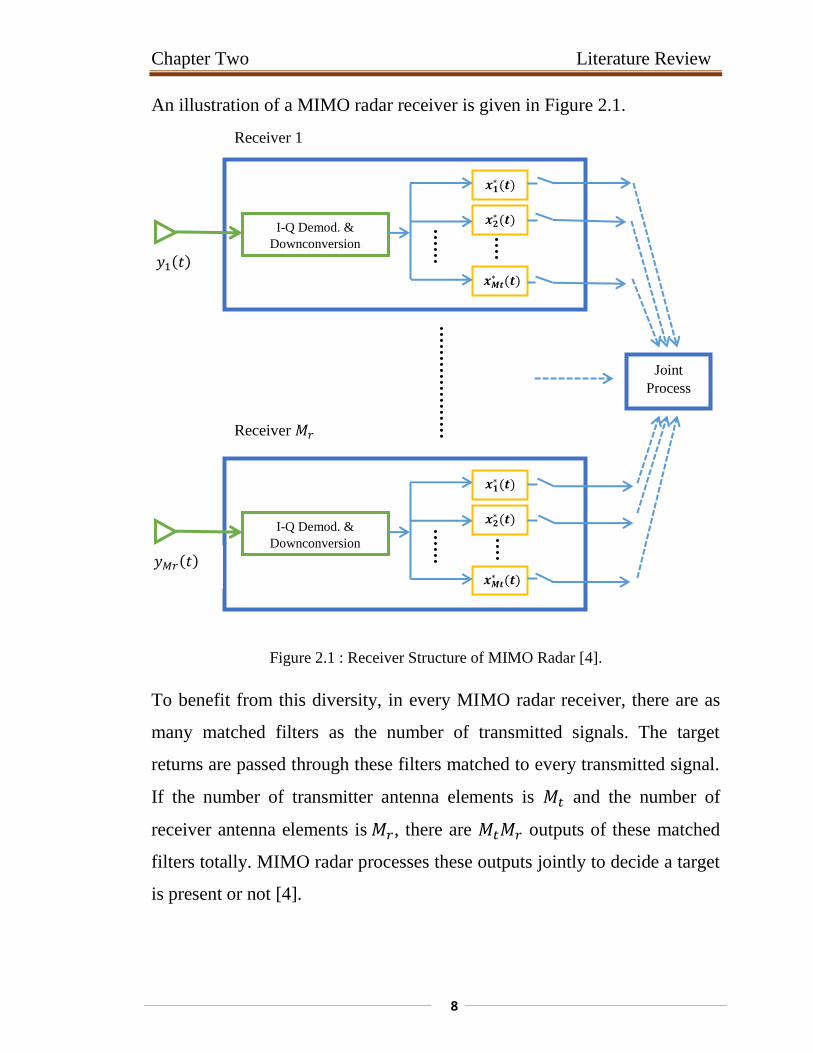
An illustration of a MIMO radar receiver is given in Figure 2.1.
Figure 2.1 : Receiver Structure of MIMO Radar [4].
To benefit from this diversity, in every MIMO radar receiver, there are as
many matched filters as the number of transmitted signals. The target
returns are passed through these filters matched to every transmitted signal.
If the number of transmitter antenna elements is and the number of
receiver antenna elements is , there are outputs of these matched
filters totally. MIMO radar processes these outputs jointly to decide a target
is present or not [4].
Receiver 1
I-Q Demod. &
Downconversion
𝒙𝟏∗ 𝒕
𝒙𝟐∗ 𝒕
𝒙𝑴𝒕∗ 𝒕
𝑦1 𝑡
Receiver 𝑀𝑟
I-Q Demod. &
Downconversion
𝒙𝟏∗ 𝒕
𝒙𝟐∗ 𝒕
𝒙𝑴𝒕∗ 𝒕
𝑦𝑀𝑟 𝑡
Joint
Process
Chapter Two Literature Review
9
Most works on MIMO radars can be broadly divided into two categories:
statistical MIMO and coherent MIMO.
2.2.1 Statistical MIMO
Statistical MIMO radar employs antenna arrays which are widely separated.
The inter element spacing in an array is also so large (several wavelengths)
that each transmit-receive pair sees a different aspect of the target and thus
sees different RCS due to target’s complex shape.
If the spacing between the antennas elements is wide enough, received
signals from each transmit receive pair become independent. This is called
Spatial or Angular Diversity [9]. Statistical MIMO radar focuses on this
property.
MIMO communication systems use the same principle to overcome fading
in the communication channel and to improve the system performance. The
concept of MIMO radar with widely separated antennas is inspired by this
property of MIMO communications and exploits the statistical properties of
target RCS [9].
2.2.2 Coherent MIMO
Coherent MIMO radar employs transmit and receive antenna arrays
containing elements which are closely spaced relatively to the working
wavelength (e.g. spaced by half the wavelength) so that the target is in the
far field of transmit and receive array [10]. The separation is always small
compared to the range extent of the target, while this configuration does not
provide spatial diversity; spatial resolution can be increased by combining
the information from all of the transmitting and receiving paths. This is
Chapter Two Literature Review
01
done by coherent processing: By exploiting the different time delays and/or
phase shifts, the received signals are coherently combined to form multiple
beams. This improvement in angular resolution means that more targets can
be detected and identified.
Coherent MIMO radars transmit orthogonal waveforms at each transmit
element, hence illuminating the scene of interest uniformly. While this
means that no beam scanning is necessary, transmit processing gain from a
focused beam is lost [11].
Diversity comes from the different waveforms transmitted by each transmit
element. In this case, sparse arrangement is possible within the sub-array,
hence improving resolutions further.
The main advantages of the coherent MIMO radar are [12]:
Improved angular resolutions;
Increased parameter identifiability, i.e. increased number of
targets that can be detected and localized by the array;
Direct application of adaptive techniques for parameter estimation
as the signals reflected back by the target are linearly independent;
Ability to null main-beam jamming and robustness to multipath;
Reduced interference to neighboring systems and more covert
operation due to the reduced spatial transmit power density of
omnidirectional transmission;
Flexibility for transmit beam-pattern design.
Chapter Two Literature Review
00
2.2.3 Target Detection Phenomenon of MIMO Radar
The basic functions of radar are detection, parameter estimation and
tracking. The most fundamental one among these functions is detection.
Detection is the process of determining whether the received signal is an
echo returning from a desired target or consists of noise only. The success
of the detection process is directly related to SNR at the receiver and the
ability of the radar to separate desired target echoes from unwanted
reflected signals. So, various techniques are developed to maximize the
SNR at the output of the receiver and to increase the ability of the radar to
separate targets from unwanted echoes and interference. After the detection
process if it turns out that a target really exists, several parameters of the
target like range, velocity and angle of arrival should be estimated from the
received signal. The choice of the radar transmit waveform is a major
contributor to the resolution of these parameters. After localization of a
target, radar can provide a target’s trajectory and track it by predicting
where it will be in the future by observing the target over time and using
dedicated filters. Some types of radar can perform more specialized tasks in
addition to these basic functions [2].
Here considerations of the Coherent MIMO radar scheme that can deal with
multiple targets. Due to the different phase shifts associated with the
different propagation paths from the transmitting antennas to targets, these
independent waveforms are linearly combined at the targets with different
phase factors. Detection of the presence of reflecting targets, is the most
fundamental function of the MIMO radar system [13]. To accomplish this
task, EM waveform is transmitted by the transmitter of MIMO Radar and it
will be reflected by targets if they are present.
Chapter Two Literature Review
02
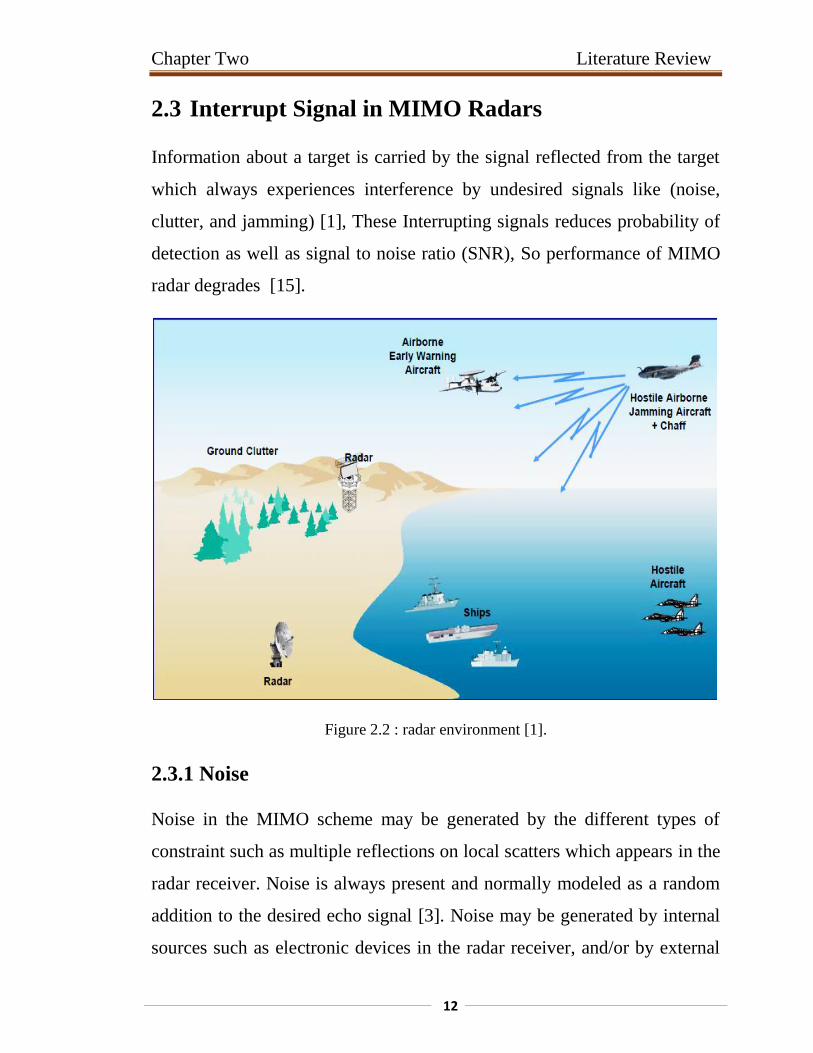
2.3 Interrupt Signal in MIMO Radars
Information about a target is carried by the signal reflected from the target
which always experiences interference by undesired signals like (noise,
clutter, and jamming) [1], These Interrupting signals reduces probability of
detection as well as signal to noise ratio (SNR), So performance of MIMO
radar degrades [15].
Figure 2.2 : radar environment [1].
2.3.1 Noise
Noise in the MIMO scheme may be generated by the different types of
constraint such as multiple reflections on local scatters which appears in the
radar receiver. Noise is always present and normally modeled as a random
addition to the desired echo signal [3]. Noise may be generated by internal
sources such as electronic devices in the radar receiver, and/or by external
Chapter Two Literature Review
03
sources like the background environment surrounding the target and the
receiver. Noise is always present and normally modeled as a random
addition to the desired echo signal.
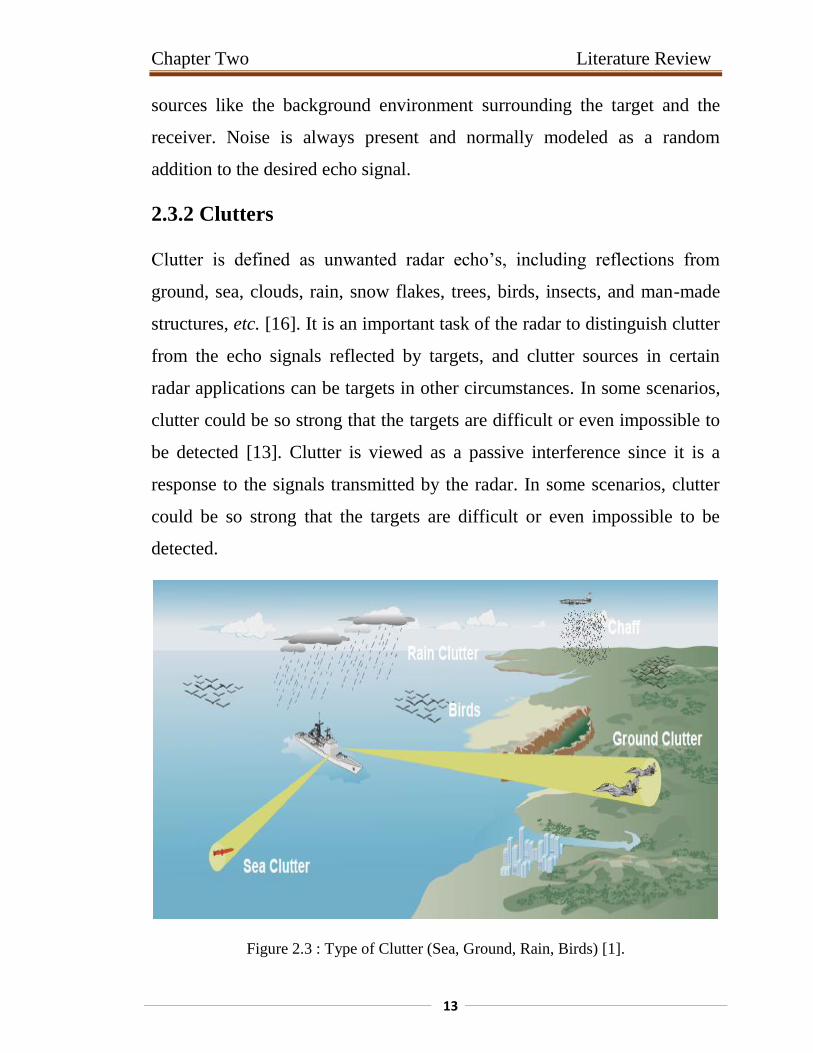
2.3.2 Clutters
Clutter is defined as unwanted radar echo’s, including reflections from
ground, sea, clouds, rain, snow flakes, trees, birds, insects, and man-made
structures, etc. [16]. It is an important task of the radar to distinguish clutter
from the echo signals reflected by targets, and clutter sources in certain
radar applications can be targets in other circumstances. In some scenarios,
clutter could be so strong that the targets are difficult or even impossible to
be detected [13]. Clutter is viewed as a passive interference since it is a
response to the signals transmitted by the radar. In some scenarios, clutter
could be so strong that the targets are difficult or even impossible to be
detected.
Figure 2.3 : Type of Clutter (Sea, Ground, Rain, Birds) [1].
Chapter Two Literature Review
04
Clutter can be classified into two main categories: surface clutter and
airborne or volume clutter. Surface clutter includes trees, vegetation, ground
terrain, man-made structures, and sea surface (sea clutter). Volume clutter
normally has a large extent (size) and includes chaff, rain, birds, and
insects. Surface clutter changes from one area to another, while volume
clutter may be more predictable.
In many cases, the clutter signal level is much higher than the receiver noise
level. Thus, the radar’s ability to detect targets embedded in high clutter
background depends on the Signal-to-Clutter Ratio (SCR) rather than the
SNR. White noise normally introduces the same amount of noise power
across all radar range bins, while clutter power may vary within a single
range bin. Since clutter returns are target-like echoes, the only way a radar
can distinguish target returns from clutter echoes is based on the target RCS
, and the anticipated clutter RCS (via clutter map). Clutter RCS can be
defined as the equivalent radar cross section attributed to reflections from a
clutter area [17].
The average clutter RCS is given by:
(2.1)
where is the clutter scattering coefficient.
The radar SNR due to a target at range is:
(2.2)
where, is the peak transmitted power, is the antenna gain, is the
wavelength, is the target RCS, is Boltzmann’s constant, is the
Chapter Two Literature Review
05
effective noise temperature, is the radar operating bandwidth, is the
receiver noise figure, and is the total radar losses. Similarly, the
Clutter-to-Noise (CNR) at the radar is:
(2.3)
2.3.3 Jammers
Jamming arises from signals emitted by intentional hostile sources or
unintentional friendly sources which use the same frequency range as the
MIMO radar does. Jamming is considered as an active interference since it
is transmitted by devices outside the MIMO radar and is generally
independent of the MIMO radar signals. Jamming can severely degrade the
performances of radar by either masking real targets with high power noise
(confusion), or producing false signals which appear as echoes from real
targets (deception) [1].
Jammers can be categorized into three general types: barrage jammer, Spot
jammer, and sweep jammer [17].
2.3.3.1 Barrage Jammer
Barrage jammer is radiating noise over the entire range of frequencies to be
covered. Barrage jammers attempt to increase the noise level across the
entire radar operating bandwidth. Consequently, this lowers the receiver
SNR, and, in turn, makes it difficult to detect the desired targets [17].
2.3.3.2 Spot Jammer
Spot jamming occurs when a jammer focuses all of its power on a single
frequency. This would severely degrade the ability to track on the jammed
Chapter Two Literature Review
06
frequency. The spot jammer measures the transmitted radar signal
bandwidth and then jams only a specific range of frequencies [17].
2.3.3.3 Sweep Jammer
Sweep jamming is when a jammer’s full power is shifted from one
frequency to another. Swept jammers continuously scan a range of
operating frequencies, interfering with each in turn. As long as all operating
frequencies are covered, the threat radar will be regularly disrupted [17].
2.4 Doppler Shift
In radar technology the Doppler Effect is using for the following tasks:
Speed measuring;
MTI - Moving Target Indication;
The Doppler- Effect is the apparent change in frequency or pitch when a
sound source moves either toward or away from the listener, or when the
listener moves either toward or away from the sound source. This principle,
discovered by the Austrian physicist Christian Doppler, applies to all wave
motion.
The apparent change in frequency between the source of a wave and the
receiver of the wave is because of relative motion between the source and
the receiver. To understand the Doppler Effect, first assume that the
frequency of a sound from a source is held constant. The wavelength of the
sound will also remain constant. If both the source and the receiver of the
sound remain stationary, the receiver will hear the same frequency sound
produced by the source. This is because the receiver is receiving the same
number of waves per second that the source is producing.
Chapter Two Literature Review
07
Now, if either the source or the receiver or both move toward the other, the
receiver will perceive a higher frequency sound. This is because the
receiver will receive a greater number of sound waves per second and
interpret the greater number of waves as a higher frequency sound.
Conversely, if the source and the receiver are moving apart, the receiver
will receive a smaller number of sound waves per second and will perceive
a lower frequency sound. In both cases, the frequency of the sound
produced by the source will have remained constant.
For example, the frequency of the whistle on a fast-moving car sounds
increasingly higher in pitch as the car is approaching than when the car is
departing. Although the whistle is generating sound waves of a constant
frequency, and though they travel through the air at the same velocity in all
directions, the distance between the approaching car and the listener is
decreasing. As a result, each wave has less distance to travel to reach the
observer than the wave preceding it. Thus, the waves arrive with decreasing
intervals of time between them [1].
The relationship between wavelength and frequency is:
(2.4)
where, is the wave frequency (Hz or cycles per second), is the
wavelength (meters), is the speed of light (approximately 3 x 108
meters/second).
The Doppler frequency shift can be calculated as follows:
(2.5)
Chapter Two Literature Review
08
2.5 Related Works
The author in [18] describe the fundamental principles of MIMO Radar to
stimulate new concepts, theories and applications of the topics related with
the ideas over MIMO techniques. he also analyzes the theory behind MIMO
techniques in detail and discussed techniques for target localization of
MIMO Radars, Also evaluates the adaptive signal design for MIMO Radars
with problem formulation, estimation and detection of the resultant signal
for better SINR (signal-interference-to-noise-ratio).Also describe the Space-
time Coding for MIMO Radar with the merits of the waveform diversity.
For implementing MIMO in any type of communication system or Radar
system, there must be some type of diversity present. It has already been
demonstrated in several articles [19-21].
The study in [4] explain the various mode of MIMO Radar, the author
work discusses the differential mode of MIMO Radar where the coherent
mode is evaluated precisely. A detailed concept about the Coherent MIMO
Radar is proposed in this paper with antenna formation of specific Coherent
mode. It also deals with the improvement that coherent MIMO offer, signal
model, higher resolution, parameter identification, applications of adaptive
array techniques of coherent MIMO and target detection enhancement of
coherent MIMO Radar. Here coherent mode is introduced by array patterns
of MIMO with collocated antennas.
The study in [7] introduce the optimum and adaptive, spatial (angle) and
temporal (doppler) processing. Also this work brings the basic phenomenon
of the optimum temporal (doppler/Pulse) processing besides at the angle of
arrival, optimum spatial (angle) beamforming and Adaptive 1-D Processing
Chapter Two Literature Review
09
of STAP. Also this work discuss some very important factors affecting
STAP such as both angle independent and dependent channel mismatch;
interference subspace leakage effects and antenna array misalignment. Also
[7] provide Algorithms and Performance of the STAP in the MIMO
systems.
The study in [22] contain information obtained from authentic and highly
regarded sources for radar system analysis and system design. It’s also
concentrates on radar fundamentals, principles, and rigorous mathematical
derivations. Also serve as a valuable reference for radar engineering and
system simulator in analyzing and understanding the many issues associated
with radar systems analysis and design.
The author in [23] address the problem of slow target detection in
heterogeneous clutter through dimensionality reduction. They proposed a
novel thinned STAP through selecting an optimum subset of antenna-pulse
pairs that achieves the maximum output signal-to-clutter-plus-noise ratio
(SCNR).
The study in [24] deals with moving target detection in low grazing angle
with orthogonal frequency division multiplexing (OFDM) multi-input
multi-output (MIMO) radar. Also discussed characteristic of OFDM MIMO
radar system and the multipath propagation model and demonstrate that the
detection performances of OFDM MIMO radar outperform the mono-static
OFDM radar
The study in [25] provide an overview of MIMO radar and the advantages
it offers as compared to its phased array counterpart. And discussed
transmit beamforming in MIMO radar and develop the signal model for it.
Chapter Three
Coherent MIMO Radar
Chapter Three Coherent MIMO Radar
20
𝒙𝟏 𝒕
𝒙𝟐 𝒕
𝒙𝒎 𝒕
𝒙𝑴𝒕 𝒕
𝒚𝟏 𝒕 𝒚𝟐 𝒕 𝒚𝒌 𝒕 𝒚𝑴𝒓 𝒕
𝜶
𝜶
𝜶
𝜶
3.1 Introduction
In the previous chapters, a brief overview of the MIMO RADAR literature
and interrupting signals are presented. On the other hand, in this chapter,
Coherent MIMO Radar and Space Time Adaptive Processing (STAP) are
explained in detail.
To study the problem of detection in Coherent MIMO so far the transmitted
signals by MIMO radar are assumed to be orthogonal and the detectors are
developed without including these STAP signals explicitly.
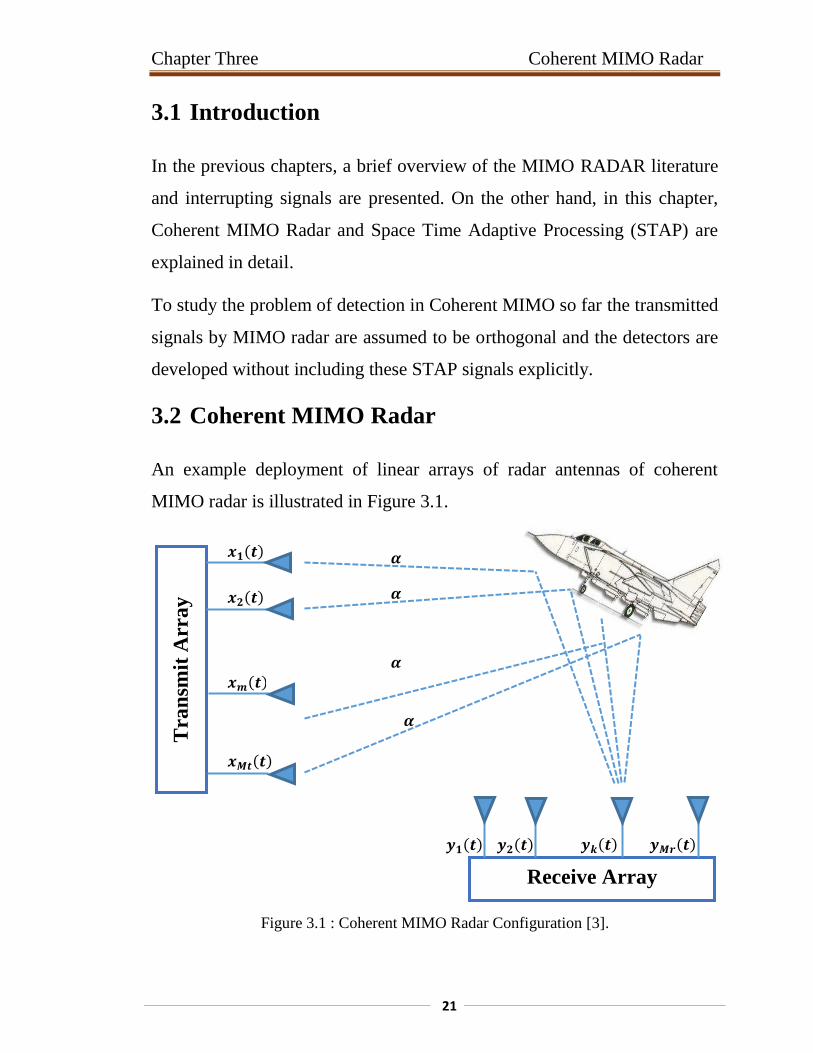
3.2 Coherent MIMO Radar
An example deployment of linear arrays of radar antennas of coherent
MIMO radar is illustrated in Figure 3.1.
Figure 3.1 : Coherent MIMO Radar Configuration [3].
Tra
nsm
it A
rra
y
Receive Array
Chapter Three Coherent MIMO Radar
22
Consider a coherent MIMO radar system that has a transmit and a receive
array consisting of and elements respectively.
Let √ ⁄ be the baseband signal transmitted by the m-th transmit
antenna.
Assume a stationary complex target be located at with the
direction of the target respect to transmit and receive arrays given by and
respectively.
The signal at the target location can be written as:
√
( ) (3.1)
where represents the time delay between target and the m-th
transmit antenna. If transmitted signals are narrowband, the sum of all the
transmitted signals at the target location can be represented by:
√
∑
( )
1
√
∑
1
(3.2)
where is the carrier frequency of the radar and represents the time
delay common to all transmit elements and represents the time delay
between the target and m-th transmit antenna.
Defining the transmit steering vector and transmitted signal
vector as follows:
Chapter Three Coherent MIMO Radar
23
[
]
[ 1
]
Then can be written in the vector form as:
√
(3.3)
where denotes the baseband signal received by the k-th receive
antenna can be written as:
√
( ) (3.4)
where represents the time delay between target and the k-th
receive antenna and is a zero mean complex random process which
accounts for receiver noise and other disturbances.
Where is a complex constant that is proportional to the RCS seen by
k-th receive antenna. Since the antenna elements in the transmit and receive
arrays are closely spaced and . So can be
rewritten as:
√
( ) (3.5)
Then the transmitted signals can be written in the vector form as:
Chapter Three Coherent MIMO Radar
24
√
∗ (3.6)
where received signal vector , receive steering vector
and received interference vector are defined as
[
]
[ 1
]
[ 1
]
If a channel matrix is defined as:
∗ (3.7)
Then the received signal can be written as:
√
(3.8)
If this received signal is fed to a bank of matched filters each of which is
matched to , and the corresponding output is sampled at the time
instants , then the output of the matched filter bank can be written in the
vector form as:
√
(3.9)
where is a complex vector whose entries correspond to the
output of the each matched filter at every receiver, is a
complex noise vector, and is a complex vector defined as:
Chapter Three Coherent MIMO Radar
25
[ ∗ ∗ ] (3.10)
where denotes the Kronecker product.
Note that distribution of each entry of is equal to the distribution of
since elements of ∗ and ∗ are on the unit circle.
The probability of detection ( ) can be written in terms of SNR and
probability of false alarm rate as:
(
) (3.11)
Note that the probability of detection does not depend on the number of
transmit antennas but depends only on number of receive antennas and
SNR.
3.3 Coherent MIMO RADAR with STC Waveforms
In the detection problems studied so far for the coherent MIMO radar
which employs antenna are close enough are developed without including
the space time coded (STC) signals explicitly. STC, transmitted signals are
modeled as a train of rectangular pulses whose amplitudes are modulated
by space time codes and the corresponding detectors are developed. With
this approach, the transmitted signals can be further optimized to a better
given performance metric. Block diagram STC Coherent MIMO radar
configuration is shown in Figure 3.2 [3].
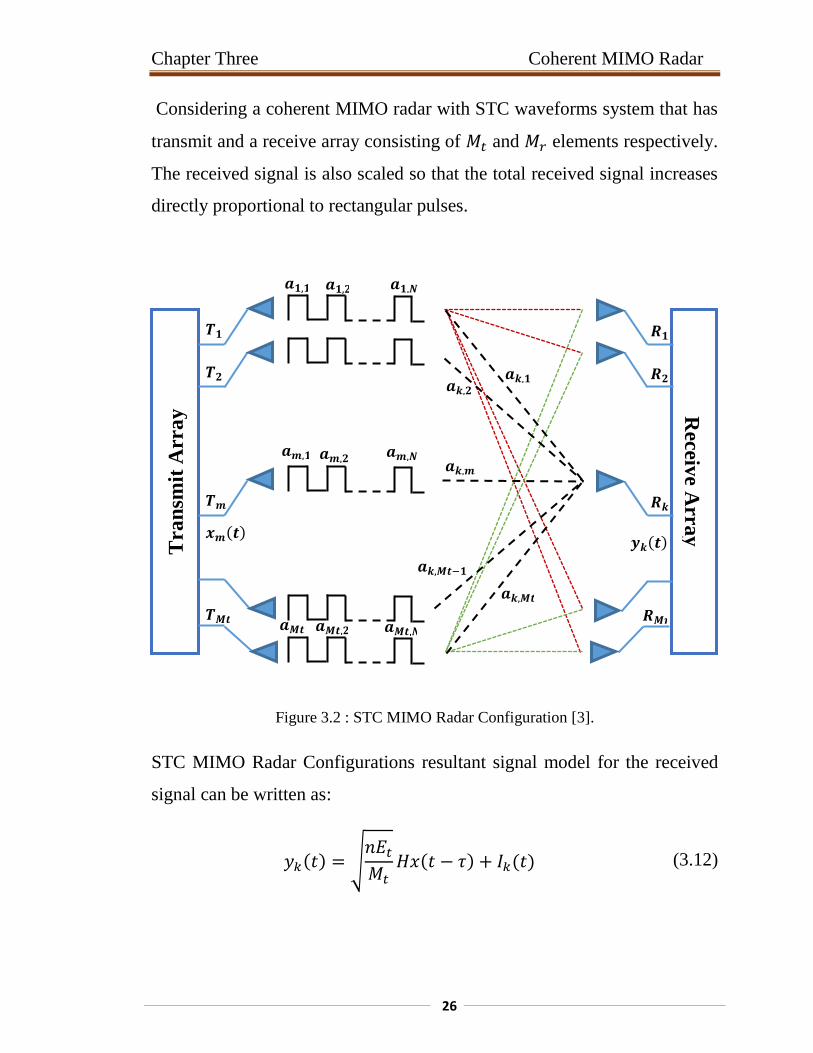
Considering a coherent MIMO radar with STC waveforms system that has
transmit and a receive array consisting of and elements respectively.
Chapter Three Coherent MIMO Radar
26
𝑻𝟏 𝑹𝟏
𝒂𝟏 𝟏 𝒂𝟏 𝟐 𝒂𝟏 𝑵
𝑻𝒎 𝑹𝒌
𝑻𝟐 𝑹𝟐
𝒙𝒎 𝒕
𝑻𝑴𝒕 𝑹𝑴𝒓
𝒚𝒌 𝒕
𝒂𝒎 𝟏 𝒂𝒎 𝟐 𝒂𝒎 𝑵
𝒂𝒌 𝟐 𝒂𝒌 𝟏
𝒂𝒌 𝑴𝒕
𝒂𝒌 𝑴𝒕 𝟏
𝒂𝒌 𝒎
𝒂𝑴𝒕 𝟏 𝒂𝑴𝒕 𝟐 𝒂𝑴𝒕 𝑵
Considering a coherent MIMO radar with STC waveforms system that has
transmit and a receive array consisting of and elements respectively.
The received signal is also scaled so that the total received signal increases
directly proportional to rectangular pulses.
Figure 3.2 : STC MIMO Radar Configuration [3].
STC MIMO Radar Configurations resultant signal model for the received
signal can be written as:
√
(3.12)
Tra
nsm
it A
rra
y R
eceive A
rray
Chapter Three Coherent MIMO Radar
27
where, √
denote the discrete time baseband signal transmitted
by the transmit antenna elements.
Where the input message signal with delay time , is the total
average transmitted energy and is the noise vector.
For coherent MIMO radar with STC waveforms, from the definition of
SNR for the radar system we can write:
∗ (3.13)
where is the numbers of space time coded transmitting pulse.
Then probability of detection ( ) can be written in terms of SNR and
probability of false alarm rate as:
∗ (3.14)
3.4 Space Time Adaptive Processing
Space-time adaptive processing (STAP) is a signal processing technique
most commonly used in radar systems. It involves adaptive array
processing algorithms to aid in target detection. Radar signal processing
benefits from STAP in areas where interference is a problem (i.e. ground
clutter, jamming, etc.). Through careful application of STAP, it is possible
to achieve order-of-magnitude sensitivity improvements in target detection.
STAP is basically an adaptive filter, which can filter over the spatial and
temporal (or time) domain. The goal of STAP is to take a hypothesis that
there is a target at a given location and velocity, and create a filter that has
Chapter Three Coherent MIMO Radar
28
high gain for that specific location and velocity, and apply proportional
attenuations of all signals (clutter, jammers and any other unwanted
returns). There can be many suspected targets to generate location and
velocity hypotheses for, and these are all normally processed together in
real time.
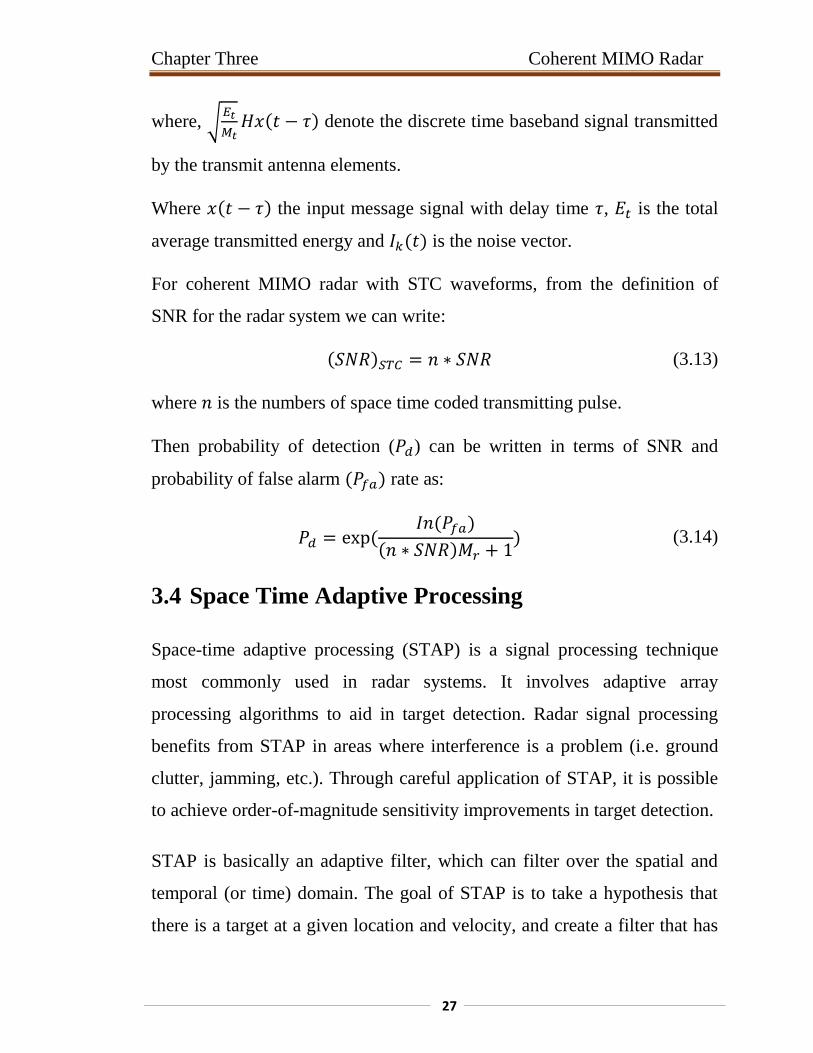
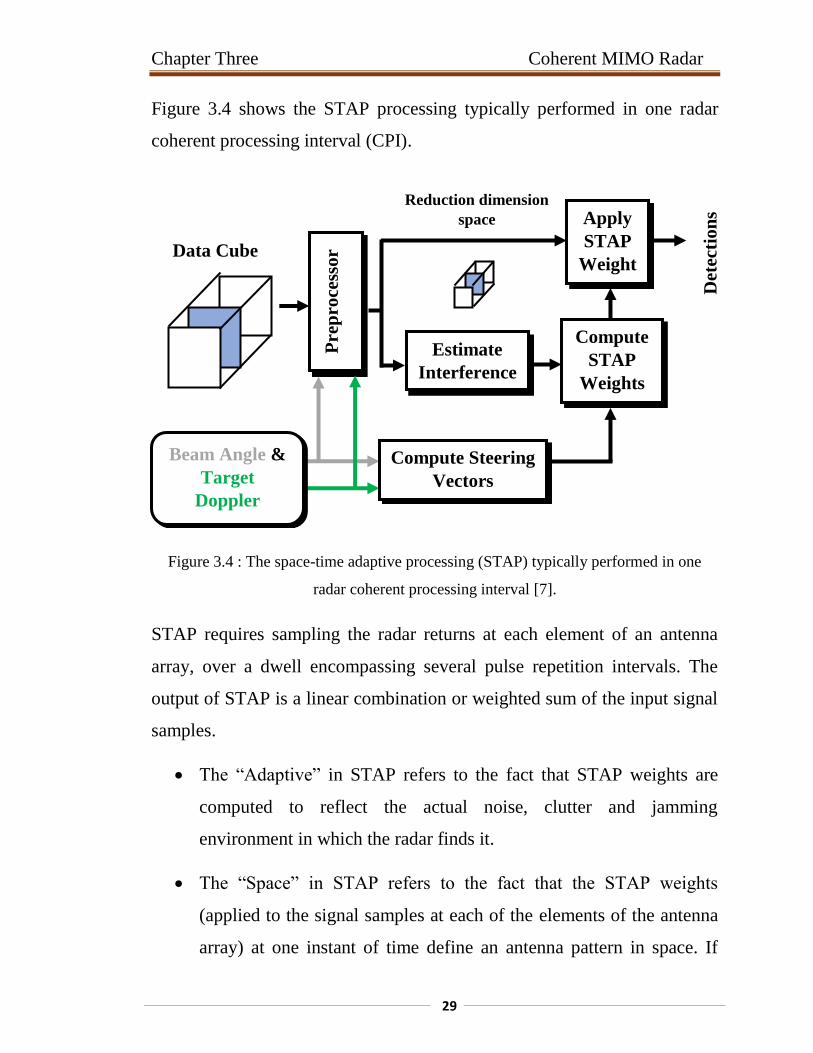
Figure 3.3 shows the signal-to-noise ratio (SNR) resulting from clutter and
a single jamming signal, as a function of angle and Doppler frequency.
Figure 3.3 also shows the view of the clutter characteristic from the
perspective of azimuth for a given Doppler frequency, and the view of the
clutter from the perspective of Doppler frequency for a given azimuth.
These views indicate that the problem is two-dimensional in nature because
filtering must be performed in each dimension.
Figure 3.3 : The problem is to detect the target by enhancing radar performance in this
environment of interference [7].
Chapter Three Coherent MIMO Radar
29
Data Cube
Det
ecti
on
s
Reduction dimension
space
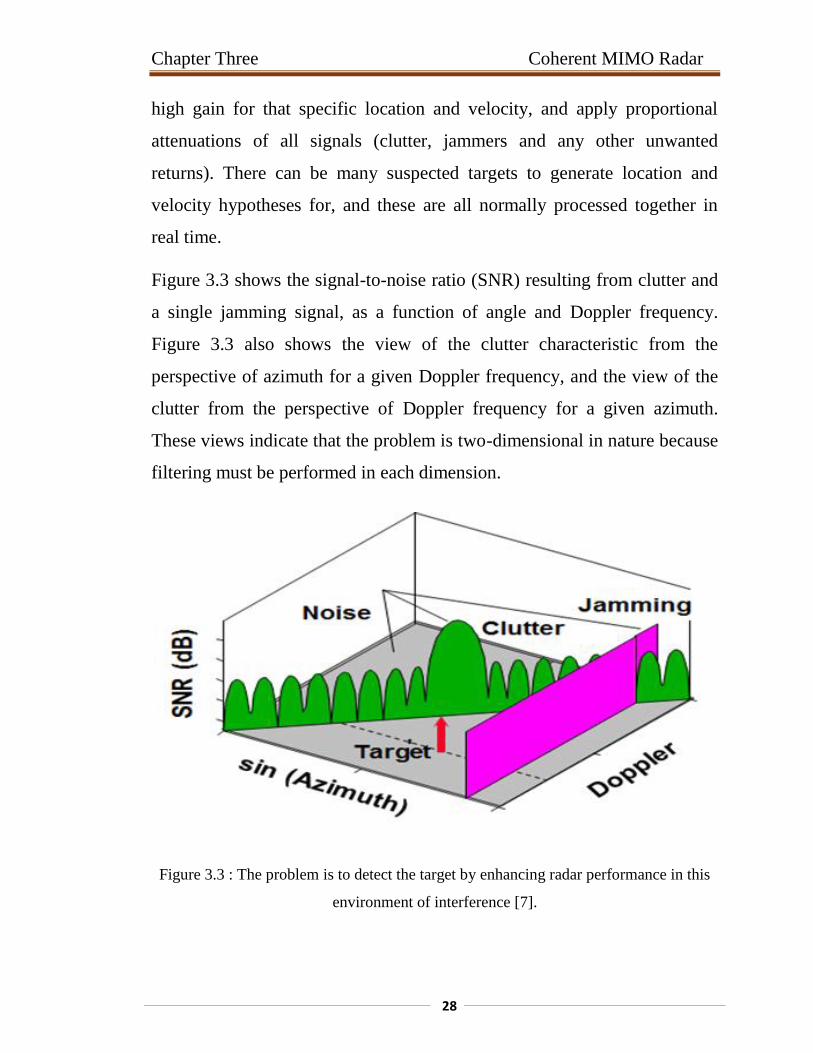
Figure 3.4 shows the STAP processing typically performed in one radar
coherent processing interval (CPI).
Figure 3.4 : The space-time adaptive processing (STAP) typically performed in one
radar coherent processing interval [7].
STAP requires sampling the radar returns at each element of an antenna
array, over a dwell encompassing several pulse repetition intervals. The
output of STAP is a linear combination or weighted sum of the input signal
samples.
The “Adaptive” in STAP refers to the fact that STAP weights are
computed to reflect the actual noise, clutter and jamming
environment in which the radar finds it.
The “Space” in STAP refers to the fact that the STAP weights
(applied to the signal samples at each of the elements of the antenna
array) at one instant of time define an antenna pattern in space. If
Pre
pro
cess
or
Apply
STAP
Weight
s
Compute
STAP
Weights
Estimate
Interference
Compute Steering
Vectors
Beam Angle &
Target
Doppler
Selection
Chapter Three Coherent MIMO Radar
31
there are jammers in the field of view, STAP will adapt the radar
antenna pattern by placing nulls in the directions of those jammers
thus rejecting jammer power.
The “Time” in STAP refers to the fact that the STAP weights applied
to the signal samples at one antenna array element over the entire
dwell define a system impulse response and, hence, a system
frequency response. The clutter spectrum seen by ground based
radars typically has a ridge at zero Doppler an can easily processed
by pulse pair processing while the clutter spectrum seen by airborne
radars is typically more complicated due to the combination of
platform motion and antenna pattern.
STAP processing adapts the radar frequency response to the actual
clutter spectrum in which the radar finds itself so that the radar will
preferentially admit signal power while simultaneously rejecting
clutter power.
The adaptive weights used by STAP are computed using a clutter plus-
noise covariance matrix estimated from data collected at successive ranges.
An accurate estimate of this matrix can be obtained only if the structure of
the clutter spectrum remains unchanged over the range interval used for the
estimation [7].
STAP radar processing combines temporal and spatial filtering that can be
used to both null jammers and detect slow moving targets. It requires very
high numerical processing rates as well as low latency processing, with
dynamic range requirements that generally require floating-point
processing.
Chapter Three Coherent MIMO Radar
30
STAP involves a two-dimensional filtering technique using a phased-array
antenna with multiple spatial channels. Coupling multiple spatial channels
with pulse-Doppler waveforms lends to the name "space-time." Applying
the statistics of the interference environment, an adaptive STAP weight
vector is formed. This weight vector is applied to the coherent samples
received by the radar.
STAP is essentially filtering in the space-time domain. This means that we
are filtering over multiple dimensions, and multi-dimensional signal
processing techniques must be employed. The goal is to find the optimal
space-time weights in -dimensional space, where is the number of
antenna elements (our spatial degrees of freedom) and is the number of
pulse-repetition interval (PRI) taps (our time degrees of freedom), to
maximize the signal-to-interference and noise ratio (SINR).Thus, the goal
is to suppress noise, clutter, jammers, etc., while keeping the desired radar
return. It can be thought of as a 2D finite-impulse response (FIR) filter,
with a standard 1D FIR filter for each channel (steered spatial channels
from an electronically steered array or individual elements), and the taps of
these 1D FIR filters corresponding to multiple returns (spaced at PRI time).
Having degrees of freedom in both the spatial domain and time domain is
crucial, as clutter can be correlated in time and space, while jammers tend
to be correlated spatially (along a specific bearing).
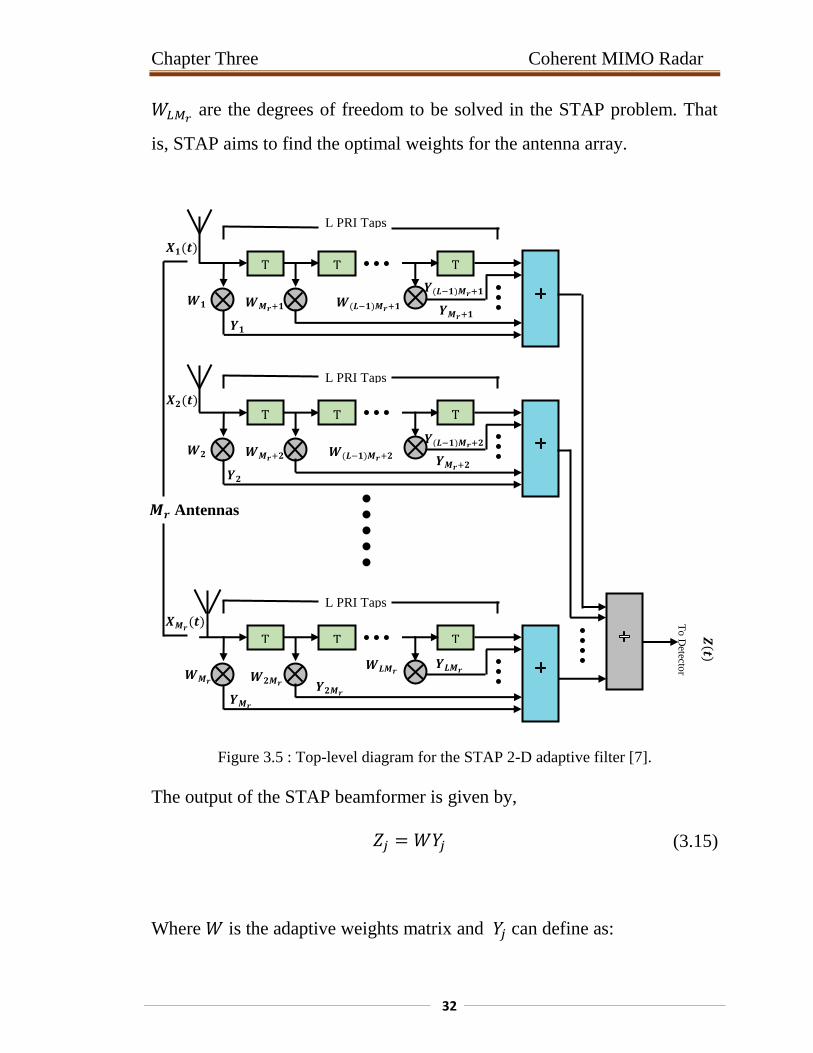
The basic functional diagram is shown in Figure 3.5. For each antenna, a
down conversion and analog-to-digital conversion step is typically
completed. Then, a 1D FIR filter with PRI length delay elements is used for
each steered antenna channel. The lexicographically ordered weights 1 to
Chapter Three Coherent MIMO Radar
32
L PRI Taps
𝑾𝑳𝑴𝒓
𝑾𝟐𝑴𝒓 𝑾𝑴𝒓
L PRI Taps
𝑾 𝑳 𝟏 𝑴𝒓+𝟏 𝑾𝑴𝒓+𝟏
𝑾𝟏
L PRI Taps
𝑾 𝑳 𝟏 𝑴𝒓+𝟐 𝑾𝑴𝒓+𝟐 𝑾𝟐
To
Detecto
r
𝒁 𝒕
𝑴𝒓 Antennas
𝑿𝑴𝒓 𝒕
𝑿𝟐 𝒕
𝑿𝟏 𝒕
𝒀𝟏
𝒀𝟐
𝒀𝑴𝒓
𝒀𝟐𝑴𝒓
𝒀𝑳𝑴𝒓
𝒀 𝑳 𝟏 𝑴𝒓+𝟏
𝒀 𝑳 𝟏 𝑴𝒓+𝟐
𝒀𝑴𝒓+𝟏
𝒀𝑴𝒓+𝟐
are the degrees of freedom to be solved in the STAP problem. That
is, STAP aims to find the optimal weights for the antenna array.
Figure 3.5 : Top-level diagram for the STAP 2-D adaptive filter [7].
The output of the STAP beamformer is given by,
(3.15)
Where is the adaptive weights matrix and can define as:
T T T
T T T
T T T
Chapter Three Coherent MIMO Radar
33
[
1
] ( )
[
(
) 1 ]
( )
( ){ } (3.16)
where the symbol indicates the Kronecker product and
=
3.4.1 Signal Only
Assume that the target is located at an angle of relative to boresight.
Considered a linear array of elements, from linear array theory can
write the output of the linear array as:
∑
1
√ (3.17)
If we define
[
1
1
]
and
Chapter Three Coherent MIMO Radar
34
[
1
1]
[
1 ]
(3.18)
In STAP, we have to choose so as to maximize :
Where is an arbitrary constant. If we apply this to our problem with
we get the known antenna solution of:
[
]
3.4.2 Interference Only
Considering the input to each antenna element is only noise and clutter.
Then the noise voltage at the output:
∑
1
(3.19)
where
[
1
1
]
Chapter Three Coherent MIMO Radar
35
If we assume that is zero-mean and uncorrelated across the elements of
the array we can write:
(3.20)
In the above is termed the interference (receiver noise only) covariance
matrix.
The total space-time covariance matrix due to both clutter and receiver
noise is:
(3.21)
If clutter and jamming are both present, the total space-time interference
covariance matrix has the form
(3.22)
3.4.3 Correlated Interference – SINR
We now have considered the case where the interference is correlated
across the array. This interference could be clutter or jammers. The
objective of the STAP algorithm is to maximize the SINR and SINR is
maximized when:
1 (3.23)
The optimal detector input is given by:
(3.24)
where is a space-time snap-shot of the input data. The main difficulty of
STAP is solving for and inverting the typically unknown interference
covariance matrix . Other difficulties arise when the interference
Chapter Three Coherent MIMO Radar
36
covariance matrix is ill-conditioned, making the inversion numerically
unstable. In general, this adaptive filtering must be performed for each of
the unambiguous range bins in the system, for each target of interest (angle-
Doppler coordinates), making for a massive computational burden. Steering
losses can occur when true target returns do not fall exactly on one of the
points in our 2D angle-Doppler plane that we've sampled with our steering
vector [7].
3.4.4 MIMO Radar STAP
STAP has been extended for MIMO radar to improve spatial resolution for
clutter, using modified SIMO radar STAP techniques. New algorithms and
formulations are required that depart from the standard technique due to the
large rank of the jammer-clutter subspace created by MIMO radar virtual
arrays, which typically involving exploiting the block diagonal structure of
the MIMO interference covariance matrix to break the large matrix
inversion problem into smaller ones.

Chapter Four
Simulation and Results
Chapter Four Simulation and Results
38
4.1 Introduction
This chapter, provided simulation results for both the probability of
detection of Coherent MIMO Radar and reduction of interrupting signals
(noise, clutter, and jamming) from the receiving signal at the receiver end of
the Coherent MIMO Radar using STAP. The required materials and
methods for evaluating the probability of detection of Coherent MIMO
Radar were given in the previous chapter. Assumed the transmitted signals
of the Coherent MIMO Radar are space time processed and probability of
detection is evaluated by changing the number of transmitter and receiver of
Coherent MIMO Radar.
At first, simulated PoD against SNR without STC and then simulated the
PoD against SNR with STC. A comparison is made between two detection
schemes. And using STAP for reducing intercepting signals (Noise, Clutter
and Jammer)
4.2 Coherent MIMO Radar
All simulations are performed for Coherent MIMO Radar with multiple
transmitting and receiving antennas for a given signal to noise ratio and
probability of false alarm ( ).
Analysis of the Probability of detection of the target for Coherent MIMO
Radar is organized as follows,
Coherent MIMO Radar without Space time processing for variable
.
Coherent MIMO Radar without Space time processing for variable
.
Chapter Four Simulation and Results
39
Coherent MIMO Radar with Space time processing for variable .
Coherent MIMO Radar with Space time processing for variable .
Comparison of Probability of Detection for Coherent MIMO Radar
between with and without Space time processing.
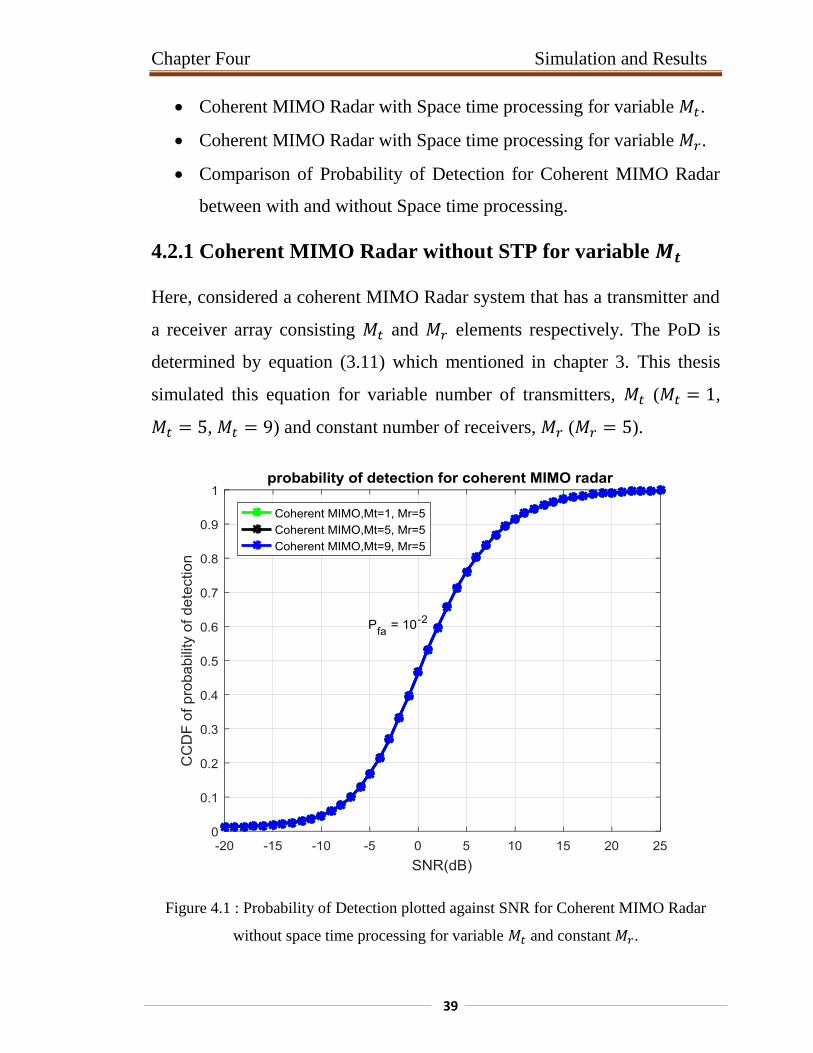
4.2.1 Coherent MIMO Radar without STP for variable
Here, considered a coherent MIMO Radar system that has a transmitter and
a receiver array consisting and elements respectively. The PoD is
determined by equation (3.11) which mentioned in chapter 3. This thesis
simulated this equation for variable number of transmitters, ( ,
, ) and constant number of receivers, ( ).
Figure 4.1 : Probability of Detection plotted against SNR for Coherent MIMO Radar
without space time processing for variable and constant .
Chapter Four Simulation and Results
41
The Figure 4.1 shows that the detection performance does not change with
the increase in . This is because the transmitted power is normalized and
it does not change with the number of transmit elements and also because
the noise power and the signal power in the received signal after coherent
summation increases at the same rate.
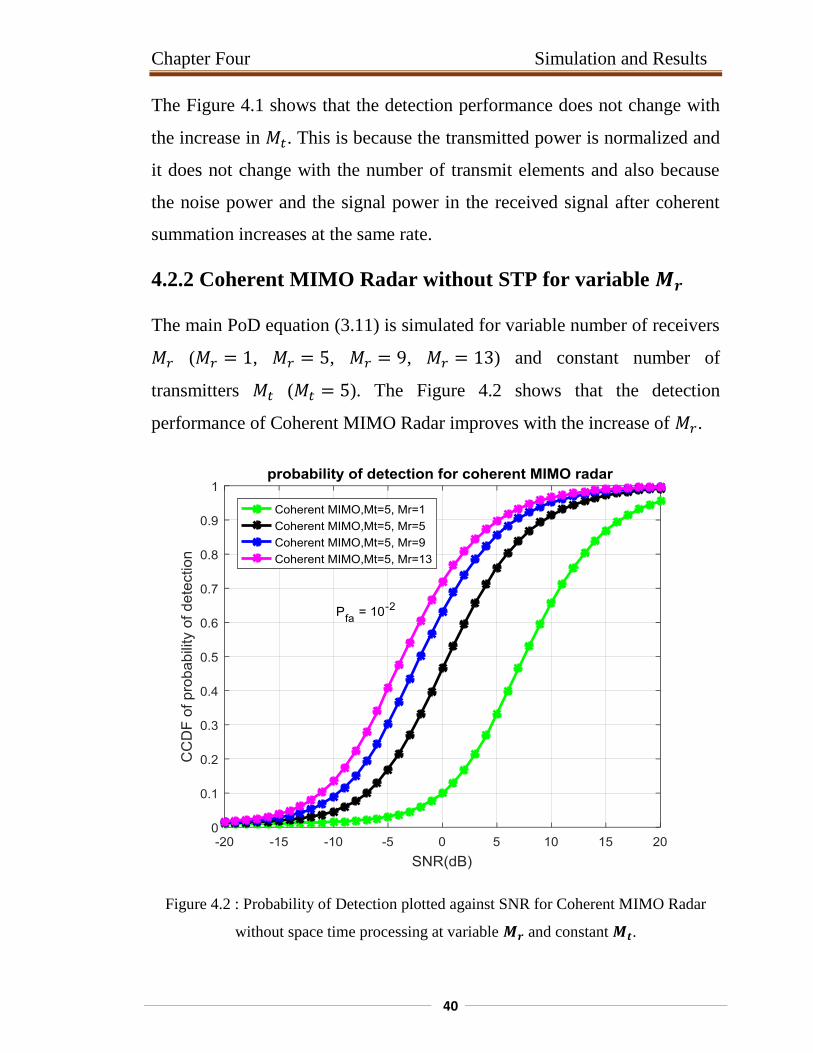
4.2.2 Coherent MIMO Radar without STP for variable
The main PoD equation (3.11) is simulated for variable number of receivers
( , , , ) and constant number of
transmitters ( ). The Figure 4.2 shows that the detection
performance of Coherent MIMO Radar improves with the increase of .
Figure 4.2 : Probability of Detection plotted against SNR for Coherent MIMO Radar
without space time processing at variable and constant .
Chapter Four Simulation and Results
40
This is because the transmitted power is normalized but it change with the
number of receiver elements, and also because the noise power and the
signal power in the received signal after coherent summation increases at
the same rate.
From the Figure 4.2, for SNR 5dB the PoD of Coherent MIMO Radar
without STP for is 0.32 in the scale of 1, PoD for for same
SNR is 0.76, PoD for for same SNR is 0.85, where the PoD of
Coherent MIMO Radar without STP for for same SNR is 0.90.
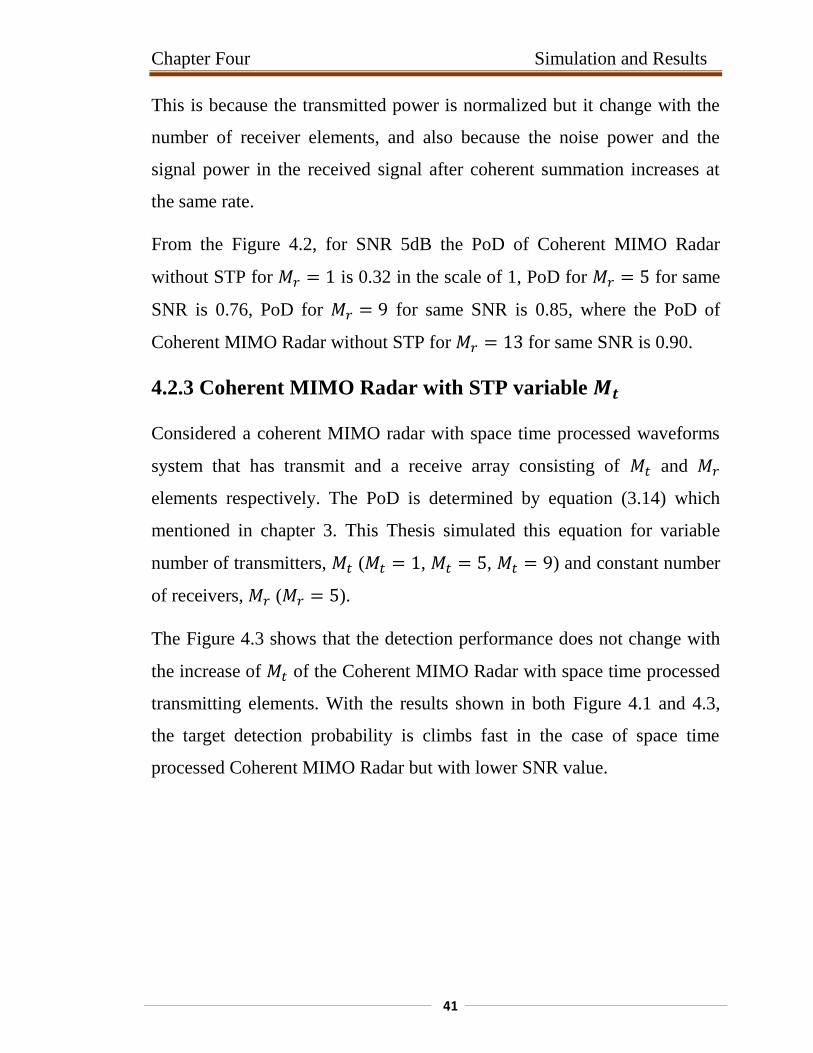
4.2.3 Coherent MIMO Radar with STP variable
Considered a coherent MIMO radar with space time processed waveforms
system that has transmit and a receive array consisting of and
elements respectively. The PoD is determined by equation (3.14) which
mentioned in chapter 3. This Thesis simulated this equation for variable
number of transmitters, ( , , ) and constant number
of receivers, ( ).
The Figure 4.3 shows that the detection performance does not change with
the increase of of the Coherent MIMO Radar with space time processed
transmitting elements. With the results shown in both Figure 4.1 and 4.3,
the target detection probability is climbs fast in the case of space time
processed Coherent MIMO Radar but with lower SNR value.
Chapter Four Simulation and Results
42
Figure 4.3 : Probability of Detection plotted against SNR with space time processed
Coherent MIMO Radar varying number of transmitters, and constant .
4.2.4 Coherent MIMO Radar with STP variable
The PoD for Coherent MIMO Radar with STC is determined by equation
(3.14) mentioned in chapter 3. Thesis simulated this equation for variable
number of receivers, ( , , , ) and a
constant number of transmitters, ( ). The Figure 4.4 shows that
the detection performances of Coherent MIMO Radar change with the
increase of . This is because the transmitted power is normalized but it
change with the number of receiver elements, and also because the noise
power and the signal power in the received signal after coherent summation
increases at the same rate. Although the number of transmitted signals and
Chapter Four Simulation and Results
43
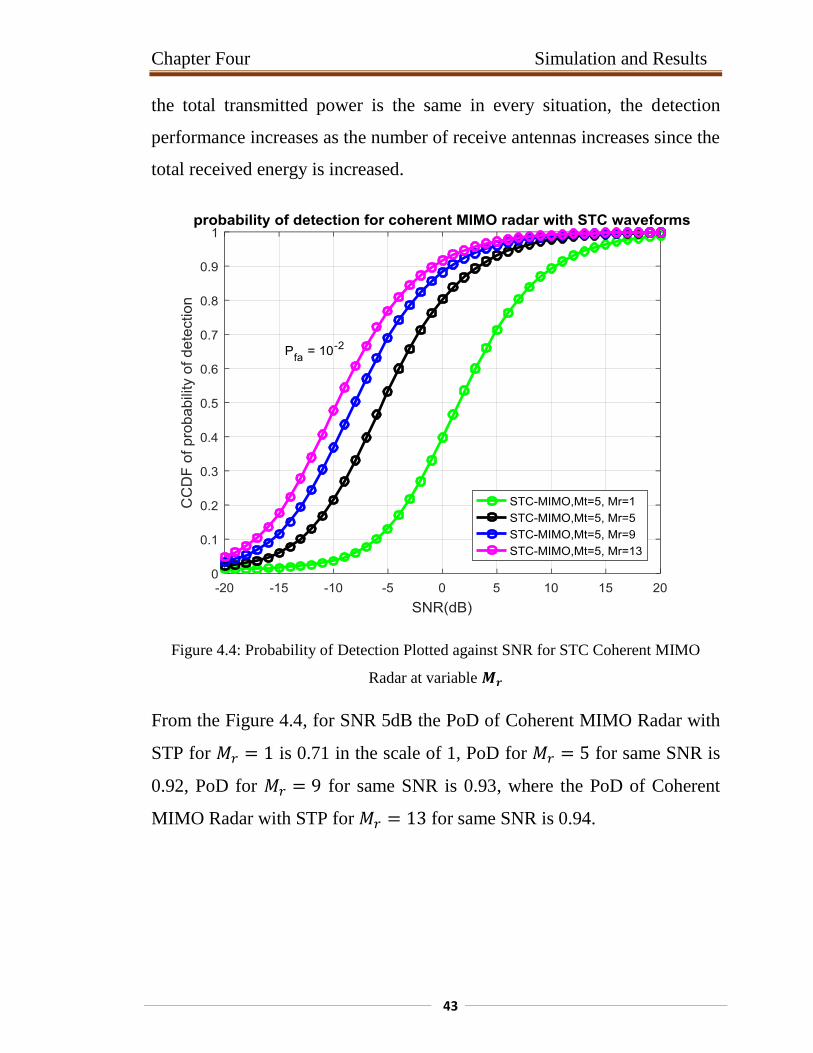
the total transmitted power is the same in every situation, the detection
performance increases as the number of receive antennas increases since the
total received energy is increased.
Figure 4.4: Probability of Detection Plotted against SNR for STC Coherent MIMO
Radar at variable
From the Figure 4.4, for SNR 5dB the PoD of Coherent MIMO Radar with
STP for is 0.71 in the scale of 1, PoD for for same SNR is
0.92, PoD for for same SNR is 0.93, where the PoD of Coherent
MIMO Radar with STP for for same SNR is 0.94.
Chapter Four Simulation and Results
44
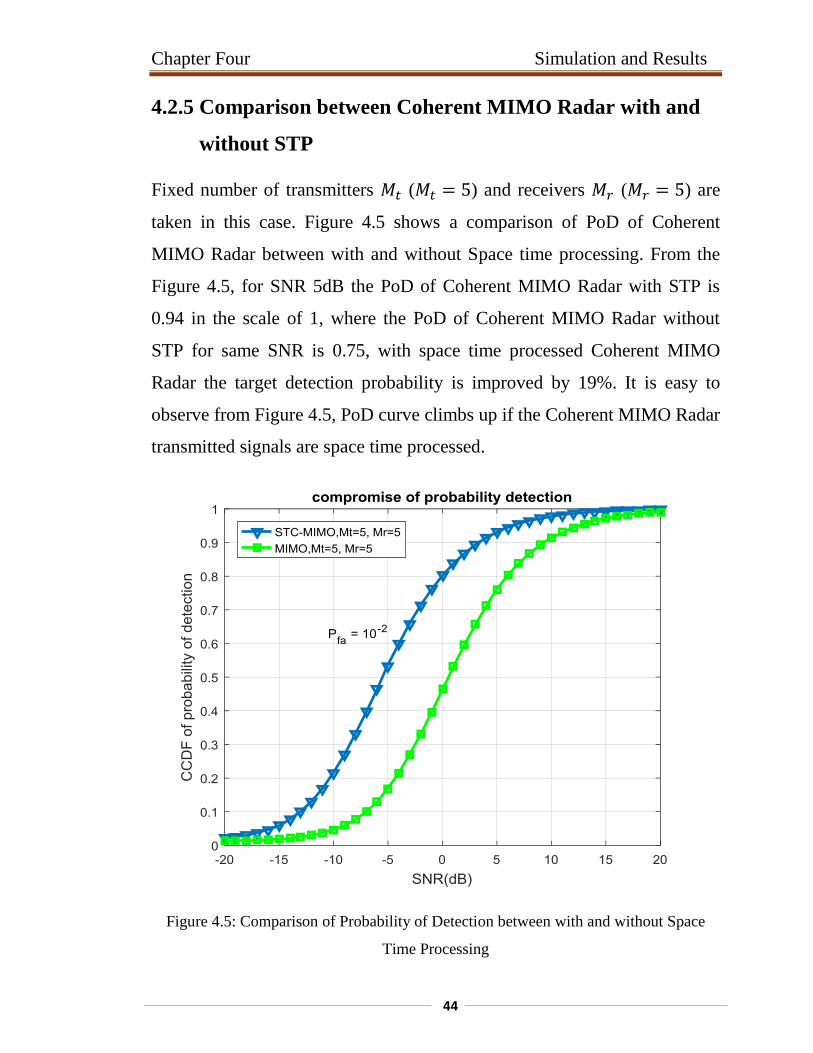
4.2.5 Comparison between Coherent MIMO Radar with and
without STP
Fixed number of transmitters ( ) and receivers ( ) are
taken in this case. Figure 4.5 shows a comparison of PoD of Coherent
MIMO Radar between with and without Space time processing. From the
Figure 4.5, for SNR 5dB the PoD of Coherent MIMO Radar with STP is
0.94 in the scale of 1, where the PoD of Coherent MIMO Radar without
STP for same SNR is 0.75, with space time processed Coherent MIMO
Radar the target detection probability is improved by 19%. It is easy to
observe from Figure 4.5, PoD curve climbs up if the Coherent MIMO Radar
transmitted signals are space time processed.
Figure 4.5: Comparison of Probability of Detection between with and without Space
Time Processing
Chapter Four Simulation and Results
45
4.3 Coherent MIMO Radar using STAP
This section, Evaluated the SINR (signal to interferences and noise ratio)
performance of STAP method and the rationale for joint space and time
(angle-Doppler) processing is presented. The detailed nature of the angle-
Doppler structure of clutter was thoroughly examined from a variety of
perspectives. A detailed analysis of the space-time clutter covariance matrix
was mentioned (3.22) at previous chapter. STAP was introduced via the
substitution of the ideal covariance matrix (unknown a priori) with an
estimation obtained from sample data.
In the STAP simulation portion, the estimated parameters are assumed
, , and k-th clutter bins equal to 2500. The clutter to noise
ratio (CNR) is 30dB. There are one jammers and one target present. The
jammer to signal ratio (JNR) for each jammer equals 0 dB. The signal to
noise ratio for target equals to 10 dB. The SINR is normalized so that the
maximum SINR equals 0 dB.
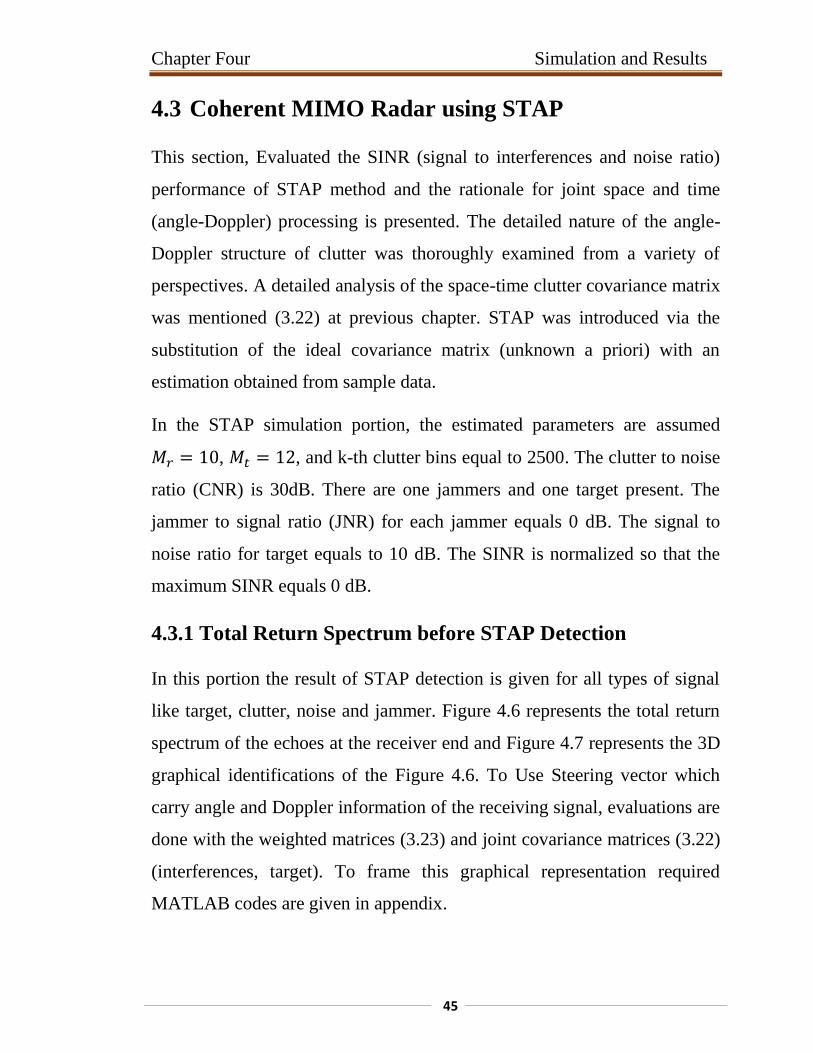
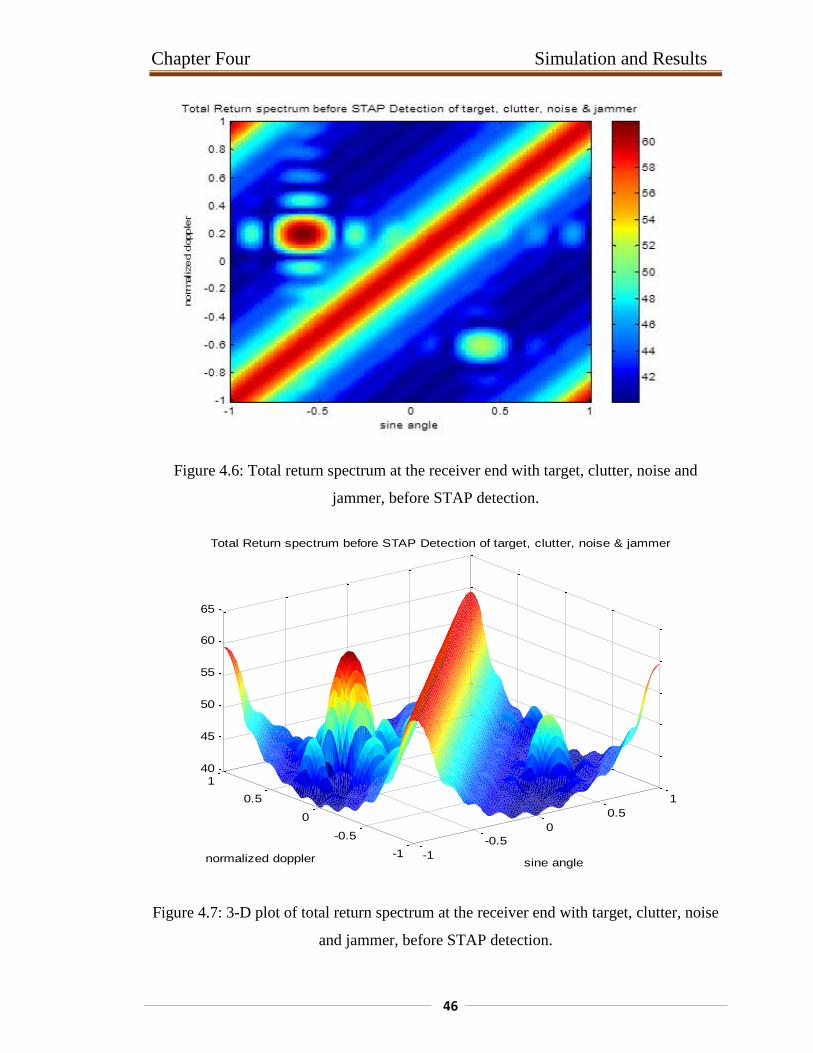
4.3.1 Total Return Spectrum before STAP Detection
In this portion the result of STAP detection is given for all types of signal
like target, clutter, noise and jammer. Figure 4.6 represents the total return
spectrum of the echoes at the receiver end and Figure 4.7 represents the 3D
graphical identifications of the Figure 4.6. To Use Steering vector which
carry angle and Doppler information of the receiving signal, evaluations are
done with the weighted matrices (3.23) and joint covariance matrices (3.22)
(interferences, target). To frame this graphical representation required
MATLAB codes are given in appendix.
Chapter Four Simulation and Results
46
Figure 4.6: Total return spectrum at the receiver end with target, clutter, noise and
jammer, before STAP detection.
Figure 4.7: 3-D plot of total return spectrum at the receiver end with target, clutter, noise
and jammer, before STAP detection.
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
140
45
50
55
60
65
sine angle
Total Return spectrum before STAP Detection of target, clutter, noise & jammer
normalized doppler
Chapter Four Simulation and Results
47
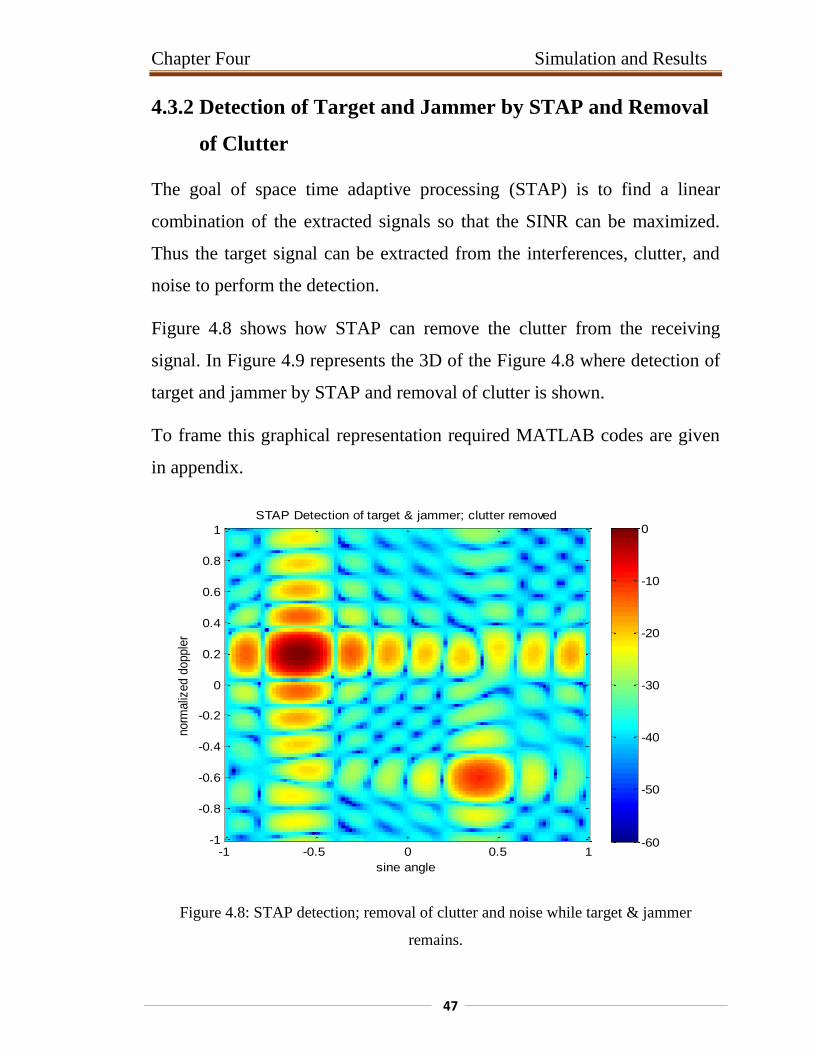
4.3.2 Detection of Target and Jammer by STAP and Removal
of Clutter
The goal of space time adaptive processing (STAP) is to find a linear
combination of the extracted signals so that the SINR can be maximized.
Thus the target signal can be extracted from the interferences, clutter, and
noise to perform the detection.
Figure 4.8 shows how STAP can remove the clutter from the receiving
signal. In Figure 4.9 represents the 3D of the Figure 4.8 where detection of
target and jammer by STAP and removal of clutter is shown.
To frame this graphical representation required MATLAB codes are given
in appendix.
Figure 4.8: STAP detection; removal of clutter and noise while target & jammer
remains.
sine angle
norm
aliz
ed d
opple
r
STAP Detection of target & jammer; clutter removed
-1 -0.5 0 0.5 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-60
-50
-40
-30
-20
-10
0
Chapter Four Simulation and Results
48
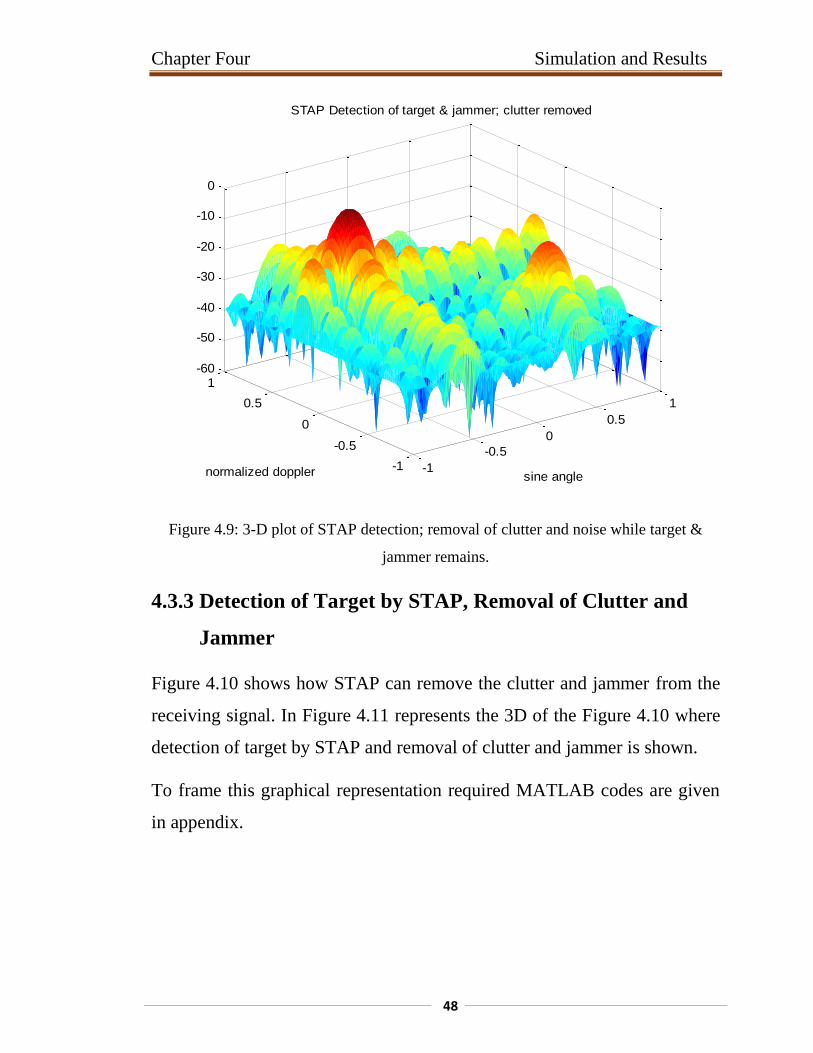
Figure 4.9: 3-D plot of STAP detection; removal of clutter and noise while target &
jammer remains.
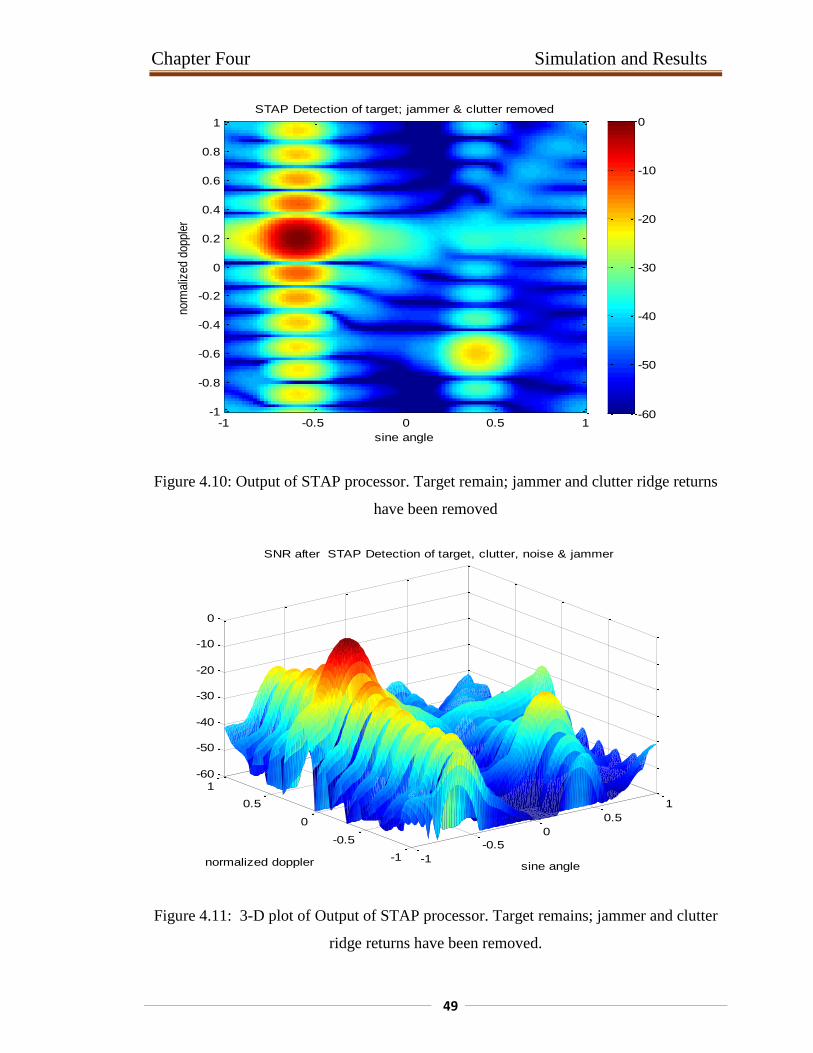
4.3.3 Detection of Target by STAP, Removal of Clutter and
Jammer
Figure 4.10 shows how STAP can remove the clutter and jammer from the
receiving signal. In Figure 4.11 represents the 3D of the Figure 4.10 where
detection of target by STAP and removal of clutter and jammer is shown.
To frame this graphical representation required MATLAB codes are given
in appendix.
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1-60
-50
-40
-30
-20
-10
0
sine angle
STAP Detection of target & jammer; clutter removed
normalized doppler
Chapter Four Simulation and Results
49
Figure 4.10: Output of STAP processor. Target remain; jammer and clutter ridge returns
have been removed
Figure 4.11: 3-D plot of Output of STAP processor. Target remains; jammer and clutter
ridge returns have been removed.
sine angle
norm
aliz
ed d
oppl
er
STAP Detection of target; jammer & clutter removed
-1 -0.5 0 0.5 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-60
-50
-40
-30
-20
-10
0
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1-60
-50
-40
-30
-20
-10
0
sine angle
SNR after STAP Detection of target, clutter, noise & jammer
normalized doppler
Chapter Five
Conclusion and Recommendations
Chapter Five Conclusion and Recommendations
50
5.1 Conclusion
Coherent MIMO radar have closely spaced antennas at both at the
transmitter and receiver end and it is assumed that, every transmitted and
received pair sees the same RCS. The improvements are achieved in
coherent MIMO radar as result of waveform diversity.
This thesis mainly discussed the adaptive techniques for reduction of the
interrupting signals as well as analyzed the probability of target detection.
Simulation results shows that Coherent MIMO radar with space time
processing waveforms has much better performance than others.
Using STAP (Space Time Adaptive Processing) enhanced performance of
Coherent MIMO Radar and reducing the unwanted signals like Noise,
Clutter and Jammer from the receiving signal at the receiver end of
Coherent MIMO Radar.
5.2 Recommendations
There are many issue on STAP of Coherent MIMO Radar that we like show
it for future studies:
This thesis analyzed the receiving portion of Coherent MIMO Radar;
recommended to research on the transmitting end of Coherent MIMO
Radar.
In the field of STAP, developing an optimal algorithm is very
essential which was not addressed here; recommended to work on
this area for future work.
References
52
References
[1] M. Skolnik, "Introduction to Radar Systems," IEEE Aerospace and Electronic
Systems Magazine, vol. 16, pp. 19-19, 2001.
[2] J. Li and P. Stoica, "MIMO radar with colocated antennas," IEEE Signal
Processing Magazine, vol. 24, pp. 106-114, 2007.
[3] M. Jankiraman, Space-time codes and MIMO systems: Artech House, 2004.
[4] S. B. Akdemir, "An Overview of Detection in MIMO Radar," ODTU, 2010.
[5] M. A. Richards, J. A. Scheer, and W. A. Holm, Principles of modern radar:
Citeseer, 2010.
[6] M. Lesturgie, "Some relevant applications of MIMO to radar," in 2011 12th
International Radar Symposium (IRS), 2011, pp. 714-721.
[7] J. R. Guerci, Space-time adaptive processing for radar: Artech House, 2014.
[8] P. Tait, "Introduction to Radar Target Recognition (Radar, Sonar &
Navigation)," The Institution of Eng. and Tech. London, 2008.
[9] E. Fishler, A. Haimovich, R. S. Blum, L. J. Cimini, D. Chizhik, and R. A.
Valenzuela, "Spatial diversity in radars-models and detection performance,"
IEEE Transactions on Signal Processing, vol. 54, pp. 823-838, 2006.
[10] D. Bliss and K. Forsythe, "Multiple-input multiple-output (MIMO) radar and
imaging: degrees of freedom and resolution," in Signals, Systems and
Computers, 2004. Conference Record of the Thirty-Seventh Asilomar Conference
on, 2003, pp. 54-59.
[11] J. Li, P. Stoica, L. Xu, and W. Roberts, "On parameter identifiability of MIMO
radar," IEEE Signal Processing Letters, vol. 14, pp. 968-971, 2007.
[12] J. Tabrikian, "Performance bounds and techniques for target localization using
MIMO radars," MIMO Radar Signal Processing, J. Li and P. Stoica, Eds, pp.
153-191, 2009.
[13] J. S. McMahon and K. Teitelbaum, "Space-time adaptive processing on the Mesh
Synchronous Processor," in Parallel Processing Symposium, 1996., Proceedings
of IPPS'96, The 10th International, 1996, pp. 734-740.
References
53
[14] Du. Chaoran, "Performance evaluation and waveform design for MIMO radar,"
Edinburgh,2010.
[15] M. A. Richards, Fundamentals of radar signal processing: Tata McGraw-Hill
Education, 2005.
[16] G. P. Kulemin, Millimeter-wave radar targets and clutter: Artech House, 2003.
[17] R. M. Bassem and Z. E. Atef, "Matlab simulations for radar systems design," ed:
CRC Press, USA, 2004.
[18] J. L. a. P. Stoica, "MIMO radar signal processing," New Jersey, John Wiley &
Sons, Inc., Hoboken publication, 2009.
[19] A. M. Haimovich, "Distributed mimo radar for imaging and high resolution
target localization," New Jersey Institute of Tech Newark, 2012.
[20] P. Wang, H. Li, and B. Himed, "Moving target detection using distributed
MIMO radar in clutter with nonhomogeneous power," IEEE Transactions on
Signal Processing, vol. 59, pp. 4809-4820, 2011.
[21] Y. Chen, Y. Nijsure, C. Yuen, Y. H. Chew, Z. Ding, and S. Boussakta,
"Adaptive distributed MIMO radar waveform optimization based on mutual
information," IEEE Transactions on Aerospace and Electronic Systems, vol. 49,
pp. 1374-1385, 2013.
[22] B. R. Mahafza, Radar signal analysis and processing using MATLAB: CRC
Press, 2016.
[23] X. Wang, E. Aboutanios, and M. G. Amin, "Slow radar target detection in
heterogeneous clutter using thinned space-time adaptive processing," IET Radar,
Sonar & Navigation, vol. 10, pp. 726-734, 2015.
[24] Y. Xia, Z. Song, Z. Lu, and Q. Fu, "Target Detection in Low Grazing Angle with
OFDM MIMO Radar," Progress In Electromagnetics Research M, vol. 46, pp.
101-112, 2016.
[25] N. Pandey, "Beamfprming in MIMO Radar," National Institute of Technology
Reurkela , 2014.
Appendices
54
Appendices
Appendix A: MATLAB code for Probability of detection for
coherent MIMO radar without STC waveforms
A.1 Coherent MIMO Radar without STC Waveform for variable
clc
clearall
p=10^-2;%pfa=probability of false alarm
r=log(p);
for M=1:4:12
snr=-20:1:25;%SNR
snr1=10.^(snr./10);
N=5;
t=((snr1*N)+1);
Pd=(r./t);%pd=probability of detection
a=exp(Pd);
if M==1
plot(snr,a,'g*-','linewidth',2)
holdon
elseif M==5
plot(snr,a,'k*-','linewidth',2)
holdon
elseif M==9
plot(snr,a,'b*-','linewidth',2)
holdon
else
plot(snr,a,'m*-','linewidth',2)
holdon
end
gridon
axis([-20 25 0 1])
title('probability of detection for coherent MIMO radar ')
xlabel('SNR(dB)')
ylabel('probability of detection')
loc=legend('Coherent MIMO,Mt=1, Mr=5','Coherent MIMO,Mt=5,
Mr=5','Coherent MIMO,Mt=9, Mr=5')
set(loc,'Location','NorthWest')
set(loc,'Interpreter','none')
end
Appendices
55
A.2 Coherent MIMO Radar without STC Waveform for variable
clc
clearall
p=10^-2;%pfa=probability of false alarm
r=log(p);
%for M=1:4:12
snr=-20:1:20;%SNR
snr1=10.^(snr./10);
for N=1:4:13
t=((snr1*N)+1);
Pd=(r./t);%pd=probability of detection
a=exp(Pd);
%ylim([0 1])
%xlim([-20 30])
if N==1
plot(snr,a,'g*-','linewidth',2)
holdon
elseif N==5
plot(snr,a,'k*-','linewidth',2)
holdon
elseif N==9
plot(snr,a,'b*-','linewidth',2)
holdon
else
plot(snr,a,'m*-','linewidth',2)
holdon
gridon
axis([-20 20 0 1])
end
end
title('probability of detection for coherent MIMO radar ')
xlabel('SNR(dB)')
ylabel('probability of detection')
loc=legend('Coherent MIMO,Mt=5, Mr=1','Coherent MIMO,Mt=5,
Mr=5','Coherent MIMO,Mt=5, Mr=9','Coherent MIMO,Mt=5,
Mr=13')
set(loc,'Location','northwest')
set(loc,'Interpreter','none')
%end
Appendices
56
Appendix B: MATLAB code for Probability of detection for
coherent MIMO radar with STC waveforms
B.1 Coherent MIMO Radar with STC Waveform for variable
clc
clearall
p=10^-2;%pfa=probability of false alarm
r=log(p);
snr=-20:1:20;%SNR
snr1=10.^(snr./10);
for M=1:4:12
N=5;
t=((snr1*N*4)+1);
Pd=(r./t);%pd=probability of detection
a=exp(Pd);
%ylim([0 1])
%xlim([-20 30])
%plot(snr,a,'m*-','linewidth',2)
if M==1
plot(snr,a,'g*-','linewidth',2)
holdon
elseif M==5
plot(snr,a,'k*-','linewidth',2)
holdon
elseif M==9
plot(snr,a,'b*-','linewidth',2)
holdon
gridon
else
plot(snr,a,'m*-','linewidth',2)
holdon
gridon
axis([-20 20 0 1])
end
end
title('probability of detection for coherent MIMO radar
with STC waveforms')
xlabel('SNR(dB)')
ylabel('probability of detection')
loc=legend('STC-MIMO,Mt=1, Mr=5','STC-MIMO,Mt=4,
Mr=5','STC-MIMO,Mt=9, Mr=5')
set(loc,'Location','NorthWest')
set(loc,'Interpreter','none')
Appendices
57
B.2 Coherent MIMO Radar without STC Waveform for variable
clc
clearall
p=10^-2;%pfa=probability of false alarm
r=log(p);
snr=-20:1:20;%SNR
snr1=10.^(snr./10);
M=5;
for N=1:4:13;
t=((snr1*N*4)+1);
Pd=(r./t);%pd=probability of detection
a=exp(Pd);
%ylim([0 1])
%xlim([-20 30])
%plot(snr,a,'*-','linewidth',2)
if N==1
plot(snr,a,'go-','linewidth',2)
holdon
elseif N==5
plot(snr,a,'ko-','linewidth',2)
holdon
elseif N==9
plot(snr,a,'bo-','linewidth',2)
holdon
else
plot(snr,a,'mo-','linewidth',2)
holdon
gridon
axis([-20 20 0 1])
end
holdon
gridon
axis([-20 20 0 1])
title('probability of detection for coherent MIMO radar
with STC waveforms')
xlabel('SNR(dB)')
ylabel('probability of detection')
end
loc=legend('STC-MIMO,Mt=5, Mr=1','STC-MIMO,Mt=5,
Mr=5','STC-MIMO,Mt=5, Mr=9','STC-MIMO,Mt=5, Mr=13')
set(loc,'Location','southeast')
set(loc,'Interpreter','none')
Appendices
58
Appendix C: MATLAB code for comparison between
Coherent MIMO Radar with and without STC Waveform
clc
clearall
p=10^-2;%pfa=probability of false alarm
r=log(p);
snr=-20:1:20;%SNR
snr1=10.^(snr./10);
N=5;
t=((snr1*N*4)+1);
Pd=(r./t);%pd=probability of detection
a=exp(Pd);
%ylim([0 1])
%xlim([-20 30])
plot(snr,a,'v-','linewidth',2)
holdon
gridon
M=5;
t=((snr1*M)+1);
Pd=(r./t);%pd=probability of detection
a1=exp(Pd);
%ylim([0 1])
%xlim([-20 30])
plot(snr,a1,'gs-','linewidth',2)
gridon
axis([-20 20 0 1])
title('compromise of probability detection')
xlabel('SNR(dB)')
ylabel('probability of detection')
loc=legend('STC-MIMO,Mt=5, Mr=5','MIMO,Mt=5, Mr=5')
set(loc,'Location','NorthWest')
set(loc,'Interpreter','none')
Appendices
59
Appendix D: MATLAB Code for removing the interference
from the total return signal using STAP
“stap_run”
clc
clearall
closeall
sintheta_t1 = .4;
wd_t1 =-.6;
sintheta_t2 = -.6;
wd_t2 = .2;
[LL, sintheta, wd] = stapstd(sintheta_t1, wd_t1,
sintheta_t2, wd_t2);
LL = LL / max(max(abs(LL)));
LL = max(LL, 1e-6);
figure (3)
imagesc(sintheta, wd, 10*log10(abs(LL)))
colorbar
title('STAP Detection of target & jammer; clutter
removed');
set(gca,'ydir','normal'), xlabel('sine angle'),
ylabel('normalized doppler')
figure (4)
surf(sintheta, wd, 10*log10(abs(LL)))
shadinginterp
title('STAP Detection of target & jammer; clutter
removed');
set(gca,'ydir','normal'), xlabel('sine angle'),
ylabel('normalized doppler')
%stop
[LL, sintheta, wd] = stap_smaa(sintheta_t1, wd_t1,
sintheta_t2, wd_t2);
LL = LL / max(max(abs(LL)));
LL = max(LL, 1e-6);
figure(5)
imagesc(sintheta, wd, 10*log10(abs(LL)))
colorbar
set(gca,'ydir','normal'), xlabel('sine angle'),
ylabel('normalized doppler')
title('STAP Detection of target; jammer & clutter
removed');
figure(6)
surf(sintheta, wd, 10*log10(abs(LL)))
shadinginterp
Appendices
61
set(gca,'ydir','normal'), xlabel('sine angle'),
ylabel('normalized doppler')
title('SNR after STAP Detection of target, clutter, noise
& jammer');
“stapstd”
function [LL, sintheta, wd] = stapstd(sintheta_t1, wd_t1,
sintheta_t2, wd_t2);
N = 10; % Number of receiving anttena
M = 12; % Pulses
No = 2500; % k-th clutter bins
beta = 1; % The way the clutter fills the angle
Doppler or proporsional constant depend on ownership speed
dol = 0.5; % d over lambda
CNR = 30; % dB Clutter to Noise Ratio
SNR = 10; % dB Signal to Noise Ratio
JSR = 0; % dB Jammer to Signal Ratio
% Set the noise power
sigma2_n = 1;
% Clutter power
sigma2_c = sigma2_n * 10^(CNR/10);
sigma_c = sqrt(sigma2_c);
% Target 1 power
sigma2_t1 = sigma2_n * 10^(SNR/10);
sigma_t1 = sqrt(sigma2_t1)
% Target 2 (Jammer) power
sigma2_t2 = sigma2_t1 * 10^(JSR/10);
sigma_t2 = sqrt(sigma2_t2);
% Ground clutter is the primary source of interference
sintheta = linspace(-1, 1, No);
phi = 2 * dol * sintheta;
wd = beta * phi;
Rc = zeros(N*M);
ac_all = zeros(N*M,1);
for k = 1: length(phi),
ac = sigma_c * stap_steering_vector(phi(k), N, beta*phi(k),
M); % 70 page Xc
Rc = Rc + ac * ac'; % covarience matrix of target "1" ,
"'" --> conjugate transpose 78 page
ac_all = ac_all + ac; % "w" not optimized yet
end
c=length(phi);
Rc = Rc / length(phi);
% Noise signals decorrelate from pulse-to-pulse
% noise covariance matrix is
Appendices
60
Rn = sigma2_n * eye(M*N);
% Target 1 covariance matrix
% at1 = st_steering_vector(sintheta_t1, N, wd_t1, M);
% Rt1 = sigma2_t1 * at1 * at1';
at1 = sigma_t1 * stap_steering_vector(sintheta_t1, N,
wd_t1, M); % Xj1
Rt1 = at1 * at1'; % covarience matrix of target "1"
% Target 2 covariance matrix (mayrepresnt a jammer)
% at2 = st_steering_vector(sintheta_t2, N, wd_t2, M);
% Rt2 = sigma2_t2 * at2 * at2';
at2 = sigma_t2 * stap_steering_vector(sintheta_t2, N,
wd_t2, M);
Rt2 = at2 * at2'; %covarience matrix of target "2"
% Total covariance matrix
R = Rc + Rn + Rt1 + Rt2;
% Unweighted spectrum of the total return from the
beamformer
sintheta = linspace(-1, 1);
wd = beta * sintheta;
Pb = zeros(length(wd), length(sintheta));
fornn = 1: length(sintheta),
for mm = 1: length(wd),
a = stap_steering_vector(sintheta(nn), N, wd(mm),
M);
Pb(mm, nn) = a' * R * a; %signal to interference noise
ratio page 80
end
end
do_plot = 1;
ifdo_plot,
% Display the total return spectrum
figure (1)
imagesc(sintheta, wd, 10*log10(abs(Pb)))
colorbar
title('Total Return spectrum before STAP Detection of
target, clutter, noise & jammer');
set(gca,'ydir','normal'), xlabel('sine angle'),
ylabel('normalized doppler')
figure (2)
surf(sintheta, wd, 10*log10(abs(Pb)))
shadinginterp, , xlabel('sine angle'), ylabel('normalized
doppler')
title('Total Return spectrum before STAP Detection of
target, clutter, noise & jammer');
end
% Total covariance matrix
R = Rc + Rn + Rt1 + Rt2;
Appendices
62
% Calculate optimal weights
Rc = (ac_all * ac_all') / length(phi);
% Rinv = inv(Rc + Rn); % Original
%wopt = Rinv * (at1 + at2);% Original
Rinv = inv(Rc + Rn ); % our expectation
wopt = Rinv' * (at1 + at2 ); % our expectation
sintheta = linspace(-1, 1);
wd = beta * sintheta;
LL = zeros(length(wd), length(sintheta));
fornn = 1: length(sintheta),
for mm = 1: length(wd),
a = stap_steering_vector(sintheta(nn), N, wd(mm),
M);
% LL(mm,nn) = abs( a' * Rinv * (at1+at2+ac_all) )^2 / (
a' * Rinv * a ); % Original
LL(mm,nn) = abs(a' * Rinv * (at1+at2+ac_all) )^2 / ( a' *
(Rc + Rn ) * a ); % our expectation stap_ll.doc page 5=SINR
end
end
disp(size(a))
disp (size(Rinv))
“stap_maa”
function [LL, sintheta, wd] = stap_smaa(sintheta_t1, wd_t1,
sintheta_t2, wd_t2);
do_plot = 1;
N = 10; Na = 2*N-1;
M = 12;
No = 250;
beta = 1;
dol = 0.5;
CNR = 20; % dB
SNR = 10; % dB
JSR = 0; % dB
% Set the noise power
sigma2_n = 1;
% Clutter power
sigma2_c = sigma2_n * 10^(CNR/10);
sigma_c = sqrt(sigma2_c);
% Target 1 power
sigma2_t1 = sigma2_n * 10^(SNR/10);
sigma_t1 = sqrt(sigma2_t1);
% Target 2 (Jammer) power
sigma2_t2 = sigma2_t1 * 10^(JSR/10);
sigma_t2 = sqrt(sigma2_t2);
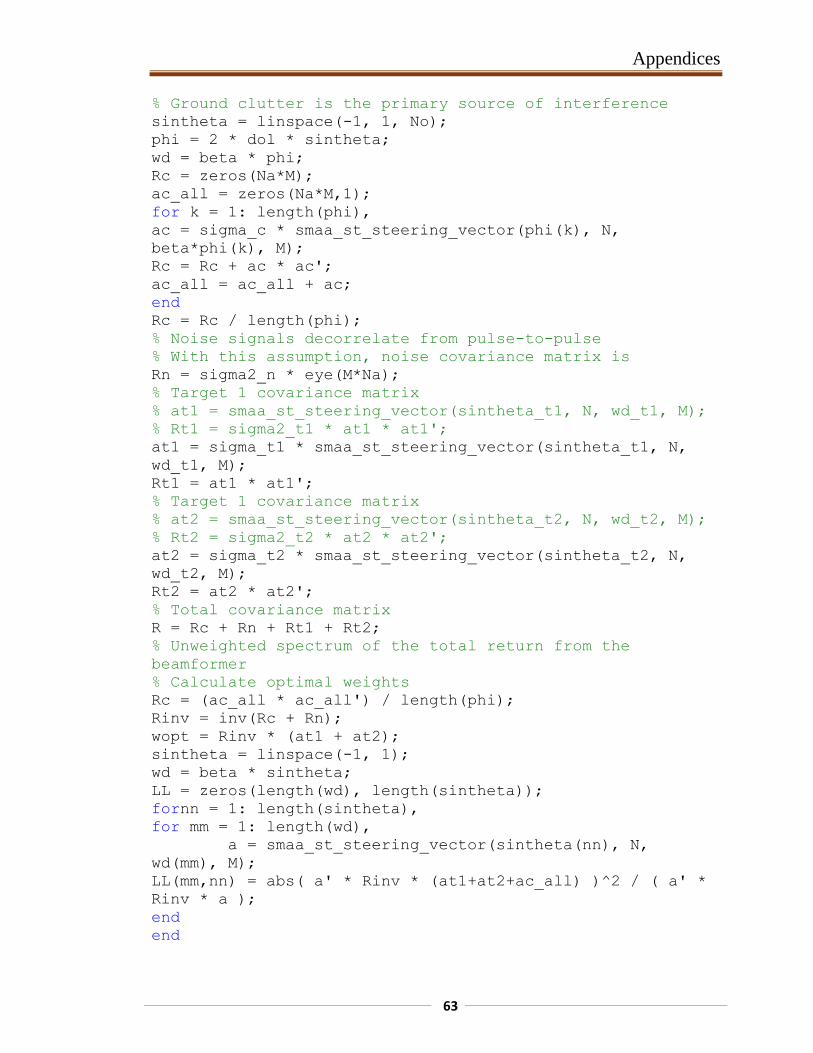
Appendices
63
% Ground clutter is the primary source of interference
sintheta = linspace(-1, 1, No);
phi = 2 * dol * sintheta;
wd = beta * phi;
Rc = zeros(Na*M);
ac_all = zeros(Na*M,1);
for k = 1: length(phi),
ac = sigma_c * smaa_st_steering_vector(phi(k), N,
beta*phi(k), M);
Rc = Rc + ac * ac';
ac_all = ac_all + ac;
end
Rc = Rc / length(phi);
% Noise signals decorrelate from pulse-to-pulse
% With this assumption, noise covariance matrix is
Rn = sigma2_n * eye(M*Na);
% Target 1 covariance matrix
% at1 = smaa_st_steering_vector(sintheta_t1, N, wd_t1, M);
% Rt1 = sigma2_t1 * at1 * at1';
at1 = sigma_t1 * smaa_st_steering_vector(sintheta_t1, N,
wd_t1, M);
Rt1 = at1 * at1';
% Target 1 covariance matrix
% at2 = smaa_st_steering_vector(sintheta_t2, N, wd_t2, M);
% Rt2 = sigma2_t2 * at2 * at2';
at2 = sigma_t2 * smaa_st_steering_vector(sintheta_t2, N,
wd_t2, M);
Rt2 = at2 * at2';
% Total covariance matrix
R = Rc + Rn + Rt1 + Rt2;
% Unweighted spectrum of the total return from the
beamformer
% Calculate optimal weights
Rc = (ac_all * ac_all') / length(phi);
Rinv = inv(Rc + Rn);
wopt = Rinv * (at1 + at2);
sintheta = linspace(-1, 1);
wd = beta * sintheta;
LL = zeros(length(wd), length(sintheta));
fornn = 1: length(sintheta),
for mm = 1: length(wd),
a = smaa_st_steering_vector(sintheta(nn), N,
wd(mm), M);
LL(mm,nn) = abs( a' * Rinv * (at1+at2+ac_all) )^2 / ( a' *
Rinv * a );
end
end
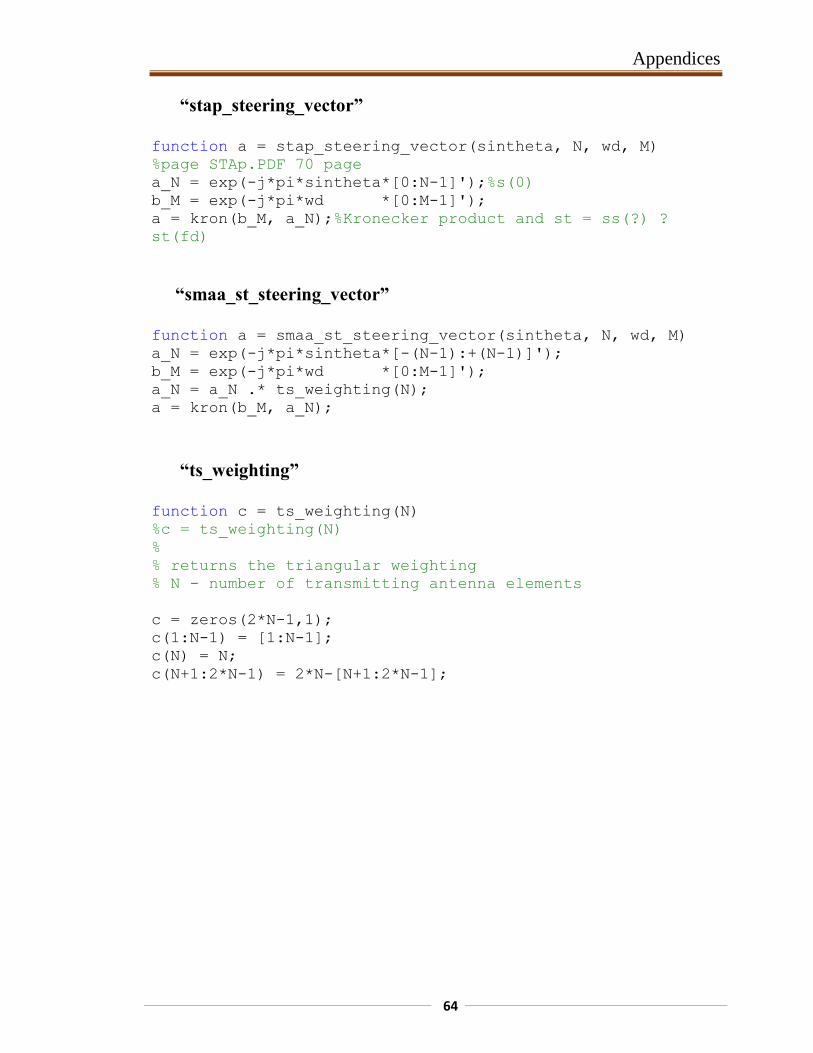
Appendices
64
“stap_steering_vector”
function a = stap_steering_vector(sintheta, N, wd, M)
%page STAp.PDF 70 page
a_N = exp(-j*pi*sintheta*[0:N-1]');%s(0)
b_M = exp(-j*pi*wd *[0:M-1]');
a = kron(b_M, a_N);%Kronecker product and st = ss(?) ?
st(fd)
“smaa_st_steering_vector”
function a = smaa_st_steering_vector(sintheta, N, wd, M)
a_N = exp(-j*pi*sintheta*[-(N-1):+(N-1)]');
b_M = exp(-j*pi*wd *[0:M-1]');
a_N = a_N .* ts_weighting(N);
a = kron(b_M, a_N);
“ts_weighting”
function c = ts_weighting(N)
%c = ts_weighting(N)
%
% returns the triangular weighting
% N - number of transmitting antenna elements
c = zeros(2*N-1,1);
c(1:N-1) = [1:N-1];
c(N) = N;
c(N+1:2*N-1) = 2*N-[N+1:2*N-1];