sistem kendali servo posisi dan kecepatan motor dengan programmable logic control (plc
TRANSCRIPT
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
102
SISTEM KENDALI SERVO POSISI dan KECEPATANMOTOR dengan PROGRAMMABLE LOGIC CONTROL
(PLC)
Andani1, Christoforus Y2, Iqbal Zakariah3, Asifa Nurul Husnah4.1Dosen Teknik Elektro UNHAS Makassar, Indonesia
1email: [email protected]
Abstrak-The simulation of controlledposition dan speed servo motor usingProgrammable Logic Control (PLC),done by comparate input and outputvoltage from practical and theory.Controlling position of servo motor haserror 2.24% till 22.22% whilecontrolling speed between 0.67% till2.92%.Keywords : Programmable LogicControl (PLC), Servo motor, speed ,position
I. PENDAHULUAN
Dalam dunia industri dapatmemanfaatkan teknologi pengendali yangada untuk meningkatkan keselamatan kerjadan juga efisiensi suatu pekerjaan. Banyaksistem manual tersebut dibuat menjadiotomatis untuk membuat pekerjaan tersebutlebih praktis. Seiring dengan perkembanganteknologi sistem kendali di dunia industri,sistem pengendalian dan monitoring mulaidiambil alih oleh alat kendali untukmenggantikan pekerjaan manual yang penuhresiko tersebut. Salah satunya adalah sistempengendali dengan menggunakanProgrammable Logic Control (PLC).
PLC dengan segala fasilitas didalamnya mampu menggantikan peranmanusia untuk mengoprasikan kendaliandari jarak jauh dengan sistem otomatis.Dalam [3] dijelaskan bahwa PLC dapatmemantau masukan-msaukan maupunkeluaran-keluaran sesuai dengan instruksi didalam program dan melaksakan aturankontrol yang telah diprogram. Hal inimembuat pekerjaan lebih efisien dan efektifdari beberapa hal seperti ekonomi, safetydan tenaga kerja.
II. DASAR TEORI
A. Programmable Logic Control (PLC)
Programmable Logic Control(singkatnya PLC) merupakan suatubentuk khusus kendalian berbasismikroprosesor yang memanfaatkanmemori yang dapat diprogram untukmenyimpan instruksi-instruksi dan untukmaengimplementasikan fungsi-fungsiisal logika, sequencing, pewaktuan(timing), pencacah (counting) danaritmatika guna mengendalikan mesin-mesin dan proses-proses (Gambar 1)(Bolton, 2004). Rancangan dioperasikanoleh para insinyur yang hanya memilikisedikit pengetahuan mengenai komputerdan pemograman. Piranti ini dirancangsedemikian rupa agar tidak hanyaprogramer komputer saja yang dapatmembuat atau mengubah program-programnya. Oleh karena itu, paraperancang PLC telah menempatkansebuah program awal di dalam piranti ini(pre-program) yang memungkinkanprogram-program kontrol dimasukkandengan menggunakan suatu bentukbahasa pemograman yang sederhana danintuitif. Istilah logika (logic) digunakankarena pemograman yang harusdilakukan sebagian besar berkaitandengan pengimplementasikan operasi-operasi logika dan penyambungan(switching). Misalnya jika A atau Bterjadi maka sambungkan (atauhidupkan) C, jika A dan B terjadi makasambungkan D. Perangkat-perangkatmasukan berupa; sensor-sensor, saklar,
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
103
dan perangkat-perangkat keluaran didalam sistem yang dikontrol, misalnya,motor, katup, dsb, dapat dihungkan kePLC. Sang operator kemudianmemasukkan serangkaian instruksi,yaitu, sebuah program, ke dalam memoriPLC. Perangkat pengontrol tersebutkemudian memantau masukan-masukandan keluaran-keluaran sesuai denganinstruksi-instruksi di dalam program danmelaksanakan aturan-aturan kontrolyang telah diprogram.
Gambar 1. Sebuah Programmable LogicControl
PLC yang digunakan dalampenelitian ini adalah PLC-5 AllenBradley yang penjelasannya dapat dibagi menjadi dua bagian yaitu perangkatkeras (hardware) dan perangkat lunak(software).B. Hardware PLC-5 Allen Breadley1. Modul Analog Input
Modul analog input (masukan)adalah modul yang menghubungkan antaramasukan sinyal analog dengan sinyalprosesor PLC-5 Allen Bradley. Untukproyek ini yang digunakan adalah 1771-IFESeries C dengan jarak masukan berupategangan antara 0-5 Volt.
2. Modul Analog OutputModul analog output (keluaran)
adalah sebuah modul intelligent blocktransfer yang mengubah besaran biner ataunilai empat digit BCD (yang berasal dariprosesor) ke sinyal analog pada ke empatkeluaran modul. Untuk proyek ini yangdigunakan adalah 1771-OFE2 dengan jarakkeluaran berupa arus antara 4-20mA.
3. Software PLC-5 Allen Breadley
a. RSLogix-5
Gambar 2. Tampilan awal RSLogic5
RSLogix-5 gambar 2 adalahperangkat lunak berbasis pada grafissehingga memudahkan setiappenggunanya dalam merencanakanprogram PLC yang diinginkandengan menggunakan teknologiHuman Machine Interface sehinggapengguna dapat mengakses instruksihanya dengan metode klik dan drag.
b. RS View32
RSView32 gambar 3 adalahsebuah perangkat lunak yangberfungsi untuk membuat sebuahantarmuka agar seluruh sistem padaPLC dapat dikendalikan dandimonitor oleh antarmuka tersebut.Perangkat lunak ini dapatberkomunikasi dengan perangkatlunak pemogram dari AllenBreadley (dalam hal ini RSLogix 5)sehingga setiap parameter dankondisi yang berubah pada PLCdapat diketahui oleh antarmukayang dibuat.
Gambar 3. Tampilan awal RSView32
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
104
C. Motor DC Servo Trainer
Dalam acuan [8] dijelaskan bahwaDC Servo Trainer ED-4400B dari ED Co.,LTD. adalah sistem loop tertutup servo DCyang didesain untuk modul praktikum. Intikonsep pembuatan sistem trainer ED-4400Buntuk memberikan pengetahuan praktikkerja pada sistem loop tertutup servo DCkepada pengguna dengan mengintegrasikandasar teori dan langkah demi langkahpercobaan dengan satu subjek.
1. Pengendali Sudut dengan LoopTertutup
Dalam sistem pengendali servoposisi gambar 4, informasi posisi daripotensiometer yang dihubungkan padamotor menjadi umpan balik padapenguat kontrol (control amplifier).Kemudian, pengaturan posisi masukandari masukan potensiometerdikombinasikan dengan sinyal balikpada input amplifier yang menjalankanmotor pada bagian yang berbeda antaradua sinyal. Ketika kadua posisiteridentifikasi, keluaran pada amplifierakan menjadi nol.
Gambar 4. Sebuah loop tertutup pengontrolposisi servo
2. Kecepatan Motor dan KarakteristikInput
Secara umum motor merupakansebuah mesin yang mengkonversienergi listrik menjadi energi gerak.Elemen kunci dari motor DC adalahmedan (field) dan armatur gambar 5.Aliran arus listrik yang melewati medanakan menimbulkan torka (tenagaputaran) pada armatur.
Gambar 5. Rangkaian ekivalen pengontrolanmotor
3. Rangkaian Pembagi Tegangan
Pada acuan [5] menjelaskanbahwa rangkaian pembagi tegangan(juga dikenal sebagai pembagi potensial) adalah rangkaian linear sederhanayang menghasilkan tegangan output(Vout) yang berasal dari tegangan input(Vin). Pembagi tegangan merujuk padapembagian dari tegangan tergantungpada komponen yang pembaginya.Rumusnya adalah sebagai berikut :
.................................(1)
III. PERANCANGAN SISTEM
Perencanaan komponenpengendali posisi dan kecepatanmenggunakan Programmable LogicControl PLC-5 Allen Breadley, dilakukadengan dua tahapan yaitu :
1. Perangkat Keras Kendalian2. Perangkat Lunak Sistem Kendali
A. Perangkat Keras Kendalian
Gambar 6 memperlihatkan blok diagramdari system Pengendalian Servo Posisidan Kecepatan Motor denganProgrammable Logic Control (PLC).Motor sebagai kendalian dan PLC dancomputer sebagai pengendali. Di dalamkomputer terdapat antarmuka yangberfungsi sebagai pengendali danmonitoring. Komputer selaluberkomunikasi dengan PLC agar setiapperubahan nilai parameter pada PLCpada dapat dilihat di antarmuka.
Pada modul analog keluaran PLC,terdapat keluaran berupa arus sebesar 4-20mA. Ini sesuai dengan nilai minimumdan maksimum Integer yang diatursebelumnya. Rangkaian PembagiTegangan akan engubah arus keluarandari PLC menjadi tegangan. Teganganini digunakan untuk mengendalikansudut posisi dan kecepatan motor. Besartegangan yang diperlukan harus sesuai
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
104
C. Motor DC Servo Trainer
Dalam acuan [8] dijelaskan bahwaDC Servo Trainer ED-4400B dari ED Co.,LTD. adalah sistem loop tertutup servo DCyang didesain untuk modul praktikum. Intikonsep pembuatan sistem trainer ED-4400Buntuk memberikan pengetahuan praktikkerja pada sistem loop tertutup servo DCkepada pengguna dengan mengintegrasikandasar teori dan langkah demi langkahpercobaan dengan satu subjek.
1. Pengendali Sudut dengan LoopTertutup
Dalam sistem pengendali servoposisi gambar 4, informasi posisi daripotensiometer yang dihubungkan padamotor menjadi umpan balik padapenguat kontrol (control amplifier).Kemudian, pengaturan posisi masukandari masukan potensiometerdikombinasikan dengan sinyal balikpada input amplifier yang menjalankanmotor pada bagian yang berbeda antaradua sinyal. Ketika kadua posisiteridentifikasi, keluaran pada amplifierakan menjadi nol.
Gambar 4. Sebuah loop tertutup pengontrolposisi servo
2. Kecepatan Motor dan KarakteristikInput
Secara umum motor merupakansebuah mesin yang mengkonversienergi listrik menjadi energi gerak.Elemen kunci dari motor DC adalahmedan (field) dan armatur gambar 5.Aliran arus listrik yang melewati medanakan menimbulkan torka (tenagaputaran) pada armatur.
Gambar 5. Rangkaian ekivalen pengontrolanmotor
3. Rangkaian Pembagi Tegangan
Pada acuan [5] menjelaskanbahwa rangkaian pembagi tegangan(juga dikenal sebagai pembagi potensial) adalah rangkaian linear sederhanayang menghasilkan tegangan output(Vout) yang berasal dari tegangan input(Vin). Pembagi tegangan merujuk padapembagian dari tegangan tergantungpada komponen yang pembaginya.Rumusnya adalah sebagai berikut :
.................................(1)
III. PERANCANGAN SISTEM
Perencanaan komponenpengendali posisi dan kecepatanmenggunakan Programmable LogicControl PLC-5 Allen Breadley, dilakukadengan dua tahapan yaitu :
1. Perangkat Keras Kendalian2. Perangkat Lunak Sistem Kendali
A. Perangkat Keras Kendalian
Gambar 6 memperlihatkan blok diagramdari system Pengendalian Servo Posisidan Kecepatan Motor denganProgrammable Logic Control (PLC).Motor sebagai kendalian dan PLC dancomputer sebagai pengendali. Di dalamkomputer terdapat antarmuka yangberfungsi sebagai pengendali danmonitoring. Komputer selaluberkomunikasi dengan PLC agar setiapperubahan nilai parameter pada PLCpada dapat dilihat di antarmuka.
Pada modul analog keluaran PLC,terdapat keluaran berupa arus sebesar 4-20mA. Ini sesuai dengan nilai minimumdan maksimum Integer yang diatursebelumnya. Rangkaian PembagiTegangan akan engubah arus keluarandari PLC menjadi tegangan. Teganganini digunakan untuk mengendalikansudut posisi dan kecepatan motor. Besartegangan yang diperlukan harus sesuai
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
104
C. Motor DC Servo Trainer
Dalam acuan [8] dijelaskan bahwaDC Servo Trainer ED-4400B dari ED Co.,LTD. adalah sistem loop tertutup servo DCyang didesain untuk modul praktikum. Intikonsep pembuatan sistem trainer ED-4400Buntuk memberikan pengetahuan praktikkerja pada sistem loop tertutup servo DCkepada pengguna dengan mengintegrasikandasar teori dan langkah demi langkahpercobaan dengan satu subjek.
1. Pengendali Sudut dengan LoopTertutup
Dalam sistem pengendali servoposisi gambar 4, informasi posisi daripotensiometer yang dihubungkan padamotor menjadi umpan balik padapenguat kontrol (control amplifier).Kemudian, pengaturan posisi masukandari masukan potensiometerdikombinasikan dengan sinyal balikpada input amplifier yang menjalankanmotor pada bagian yang berbeda antaradua sinyal. Ketika kadua posisiteridentifikasi, keluaran pada amplifierakan menjadi nol.
Gambar 4. Sebuah loop tertutup pengontrolposisi servo
2. Kecepatan Motor dan KarakteristikInput
Secara umum motor merupakansebuah mesin yang mengkonversienergi listrik menjadi energi gerak.Elemen kunci dari motor DC adalahmedan (field) dan armatur gambar 5.Aliran arus listrik yang melewati medanakan menimbulkan torka (tenagaputaran) pada armatur.
Gambar 5. Rangkaian ekivalen pengontrolanmotor
3. Rangkaian Pembagi Tegangan
Pada acuan [5] menjelaskanbahwa rangkaian pembagi tegangan(juga dikenal sebagai pembagi potensial) adalah rangkaian linear sederhanayang menghasilkan tegangan output(Vout) yang berasal dari tegangan input(Vin). Pembagi tegangan merujuk padapembagian dari tegangan tergantungpada komponen yang pembaginya.Rumusnya adalah sebagai berikut :
.................................(1)
III. PERANCANGAN SISTEM
Perencanaan komponenpengendali posisi dan kecepatanmenggunakan Programmable LogicControl PLC-5 Allen Breadley, dilakukadengan dua tahapan yaitu :
1. Perangkat Keras Kendalian2. Perangkat Lunak Sistem Kendali
A. Perangkat Keras Kendalian
Gambar 6 memperlihatkan blok diagramdari system Pengendalian Servo Posisidan Kecepatan Motor denganProgrammable Logic Control (PLC).Motor sebagai kendalian dan PLC dancomputer sebagai pengendali. Di dalamkomputer terdapat antarmuka yangberfungsi sebagai pengendali danmonitoring. Komputer selaluberkomunikasi dengan PLC agar setiapperubahan nilai parameter pada PLCpada dapat dilihat di antarmuka.
Pada modul analog keluaran PLC,terdapat keluaran berupa arus sebesar 4-20mA. Ini sesuai dengan nilai minimumdan maksimum Integer yang diatursebelumnya. Rangkaian PembagiTegangan akan engubah arus keluarandari PLC menjadi tegangan. Teganganini digunakan untuk mengendalikansudut posisi dan kecepatan motor. Besartegangan yang diperlukan harus sesuai
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
105
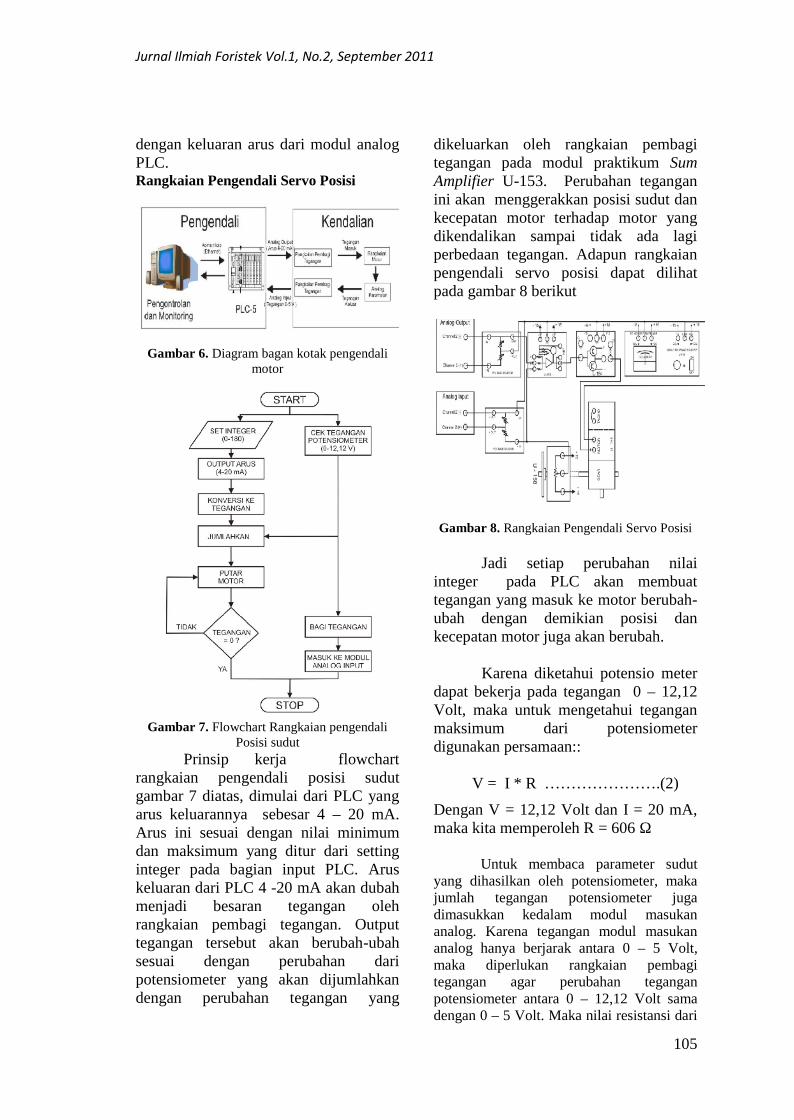
dengan keluaran arus dari modul analogPLC.Rangkaian Pengendali Servo Posisi
Gambar 6. Diagram bagan kotak pengendalimotor
Gambar 7. Flowchart Rangkaian pengendaliPosisi sudut
Prinsip kerja flowchartrangkaian pengendali posisi sudutgambar 7 diatas, dimulai dari PLC yangarus keluarannya sebesar 4 – 20 mA.Arus ini sesuai dengan nilai minimumdan maksimum yang ditur dari settinginteger pada bagian input PLC. Aruskeluaran dari PLC 4 -20 mA akan dubahmenjadi besaran tegangan olehrangkaian pembagi tegangan. Outputtegangan tersebut akan berubah-ubahsesuai dengan perubahan daripotensiometer yang akan dijumlahkandengan perubahan tegangan yang
dikeluarkan oleh rangkaian pembagitegangan pada modul praktikum SumAmplifier U-153. Perubahan teganganini akan menggerakkan posisi sudut dankecepatan motor terhadap motor yangdikendalikan sampai tidak ada lagiperbedaan tegangan. Adapun rangkaianpengendali servo posisi dapat dilihatpada gambar 8 berikut
Gambar 8. Rangkaian Pengendali Servo Posisi
Jadi setiap perubahan nilaiinteger pada PLC akan membuattegangan yang masuk ke motor berubah-ubah dengan demikian posisi dankecepatan motor juga akan berubah.
Karena diketahui potensio meterdapat bekerja pada tegangan 0 – 12,12Volt, maka untuk mengetahui teganganmaksimum dari potensiometerdigunakan persamaan::
V = I * R ………………….(2)
Dengan V = 12,12 Volt dan I = 20 mA,maka kita memperoleh R = 606 Ω
Untuk membaca parameter sudutyang dihasilkan oleh potensiometer, makajumlah tegangan potensiometer jugadimasukkan kedalam modul masukananalog. Karena tegangan modul masukananalog hanya berjarak antara 0 – 5 Volt,maka diperlukan rangkaian pembagitegangan agar perubahan teganganpotensiometer antara 0 – 12,12 Volt samadengan 0 – 5 Volt. Maka nilai resistansi dari
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
106
kedua tahanan pada rangkaian pembagitegangan yang dipakai adalah:
Vout = 5 Volt, R1 = 500 Ω dan Vin = 12,12Volt, maka yang didapat adalah R2 = 354 Ω.
Rangkaian Pengendali Kecepatan Motor
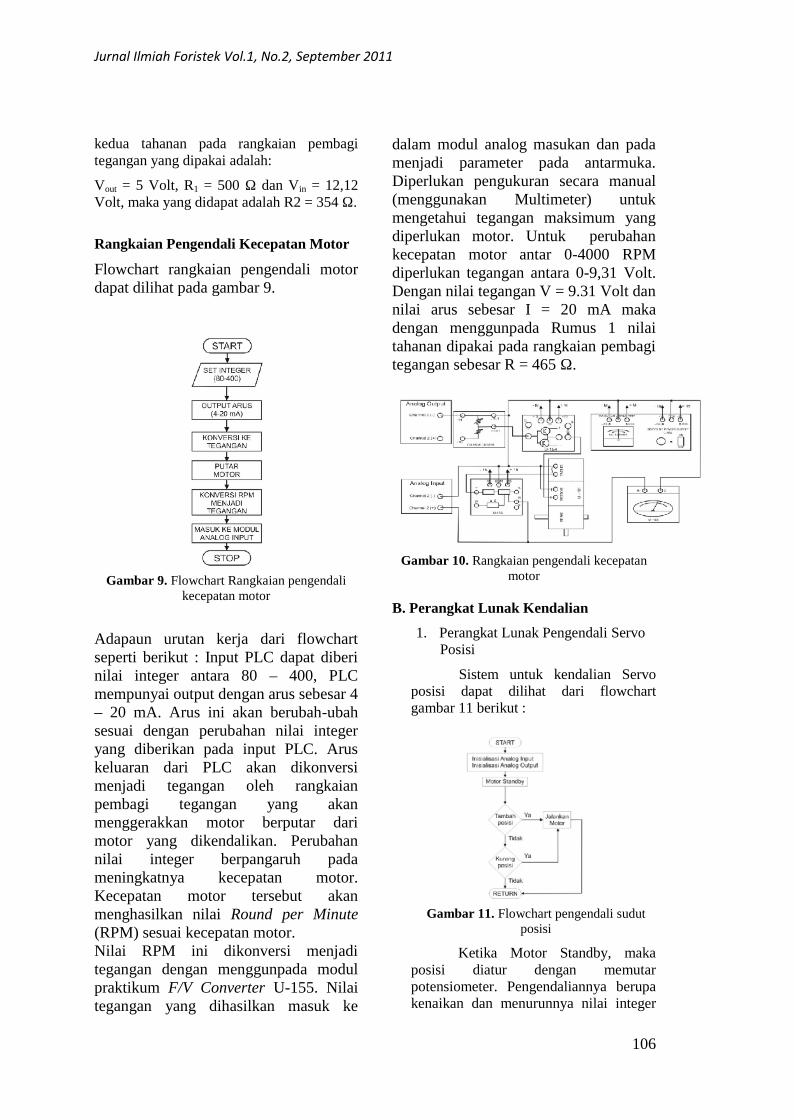
Flowchart rangkaian pengendali motordapat dilihat pada gambar 9.
Gambar 9. Flowchart Rangkaian pengendalikecepatan motor
Adapaun urutan kerja dari flowchartseperti berikut : Input PLC dapat diberinilai integer antara 80 – 400, PLCmempunyai output dengan arus sebesar 4– 20 mA. Arus ini akan berubah-ubahsesuai dengan perubahan nilai integeryang diberikan pada input PLC. Aruskeluaran dari PLC akan dikonversimenjadi tegangan oleh rangkaianpembagi tegangan yang akanmenggerakkan motor berputar darimotor yang dikendalikan. Perubahannilai integer berpangaruh padameningkatnya kecepatan motor.Kecepatan motor tersebut akanmenghasilkan nilai Round per Minute(RPM) sesuai kecepatan motor.Nilai RPM ini dikonversi menjaditegangan dengan menggunpada modulpraktikum F/V Converter U-155. Nilaitegangan yang dihasilkan masuk ke
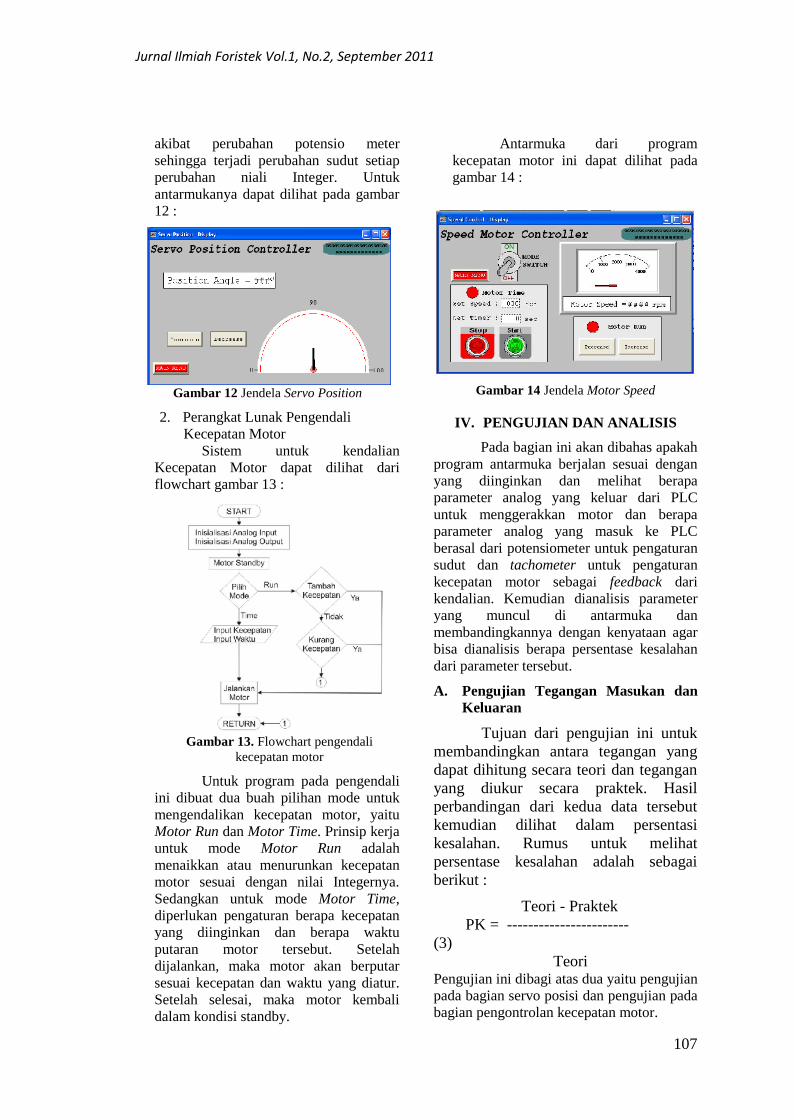
dalam modul analog masukan dan padamenjadi parameter pada antarmuka.Diperlukan pengukuran secara manual(menggunakan Multimeter) untukmengetahui tegangan maksimum yangdiperlukan motor. Untuk perubahankecepatan motor antar 0-4000 RPMdiperlukan tegangan antara 0-9,31 Volt.Dengan nilai tegangan V = 9.31 Volt dannilai arus sebesar I = 20 mA makadengan menggunpada Rumus 1 nilaitahanan dipakai pada rangkaian pembagitegangan sebesar R = 465 Ω.
Gambar 10. Rangkaian pengendali kecepatanmotor
B. Perangkat Lunak Kendalian
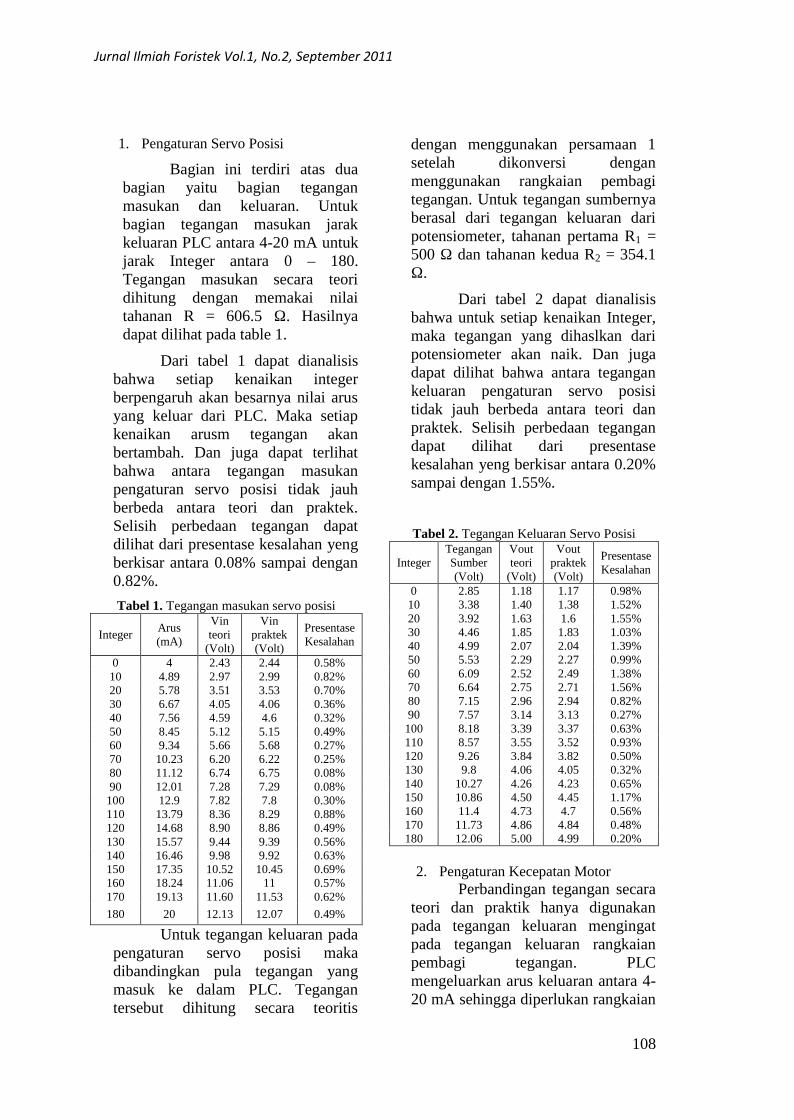
1. Perangkat Lunak Pengendali ServoPosisi
Sistem untuk kendalian Servoposisi dapat dilihat dari flowchartgambar 11 berikut :
Gambar 11. Flowchart pengendali sudutposisi
Ketika Motor Standby, makaposisi diatur dengan memutarpotensiometer. Pengendaliannya berupakenaikan dan menurunnya nilai integer
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
107
akibat perubahan potensio metersehingga terjadi perubahan sudut setiapperubahan niali Integer. Untukantarmukanya dapat dilihat pada gambar12 :
Gambar 12 Jendela Servo Position
2. Perangkat Lunak PengendaliKecepatan Motor
Sistem untuk kendalianKecepatan Motor dapat dilihat dariflowchart gambar 13 :
Gambar 13. Flowchart pengendalikecepatan motor
Untuk program pada pengendaliini dibuat dua buah pilihan mode untukmengendalikan kecepatan motor, yaituMotor Run dan Motor Time. Prinsip kerjauntuk mode Motor Run adalahmenaikkan atau menurunkan kecepatanmotor sesuai dengan nilai Integernya.Sedangkan untuk mode Motor Time,diperlukan pengaturan berapa kecepatanyang diinginkan dan berapa waktuputaran motor tersebut. Setelahdijalankan, maka motor akan berputarsesuai kecepatan dan waktu yang diatur.Setelah selesai, maka motor kembalidalam kondisi standby.
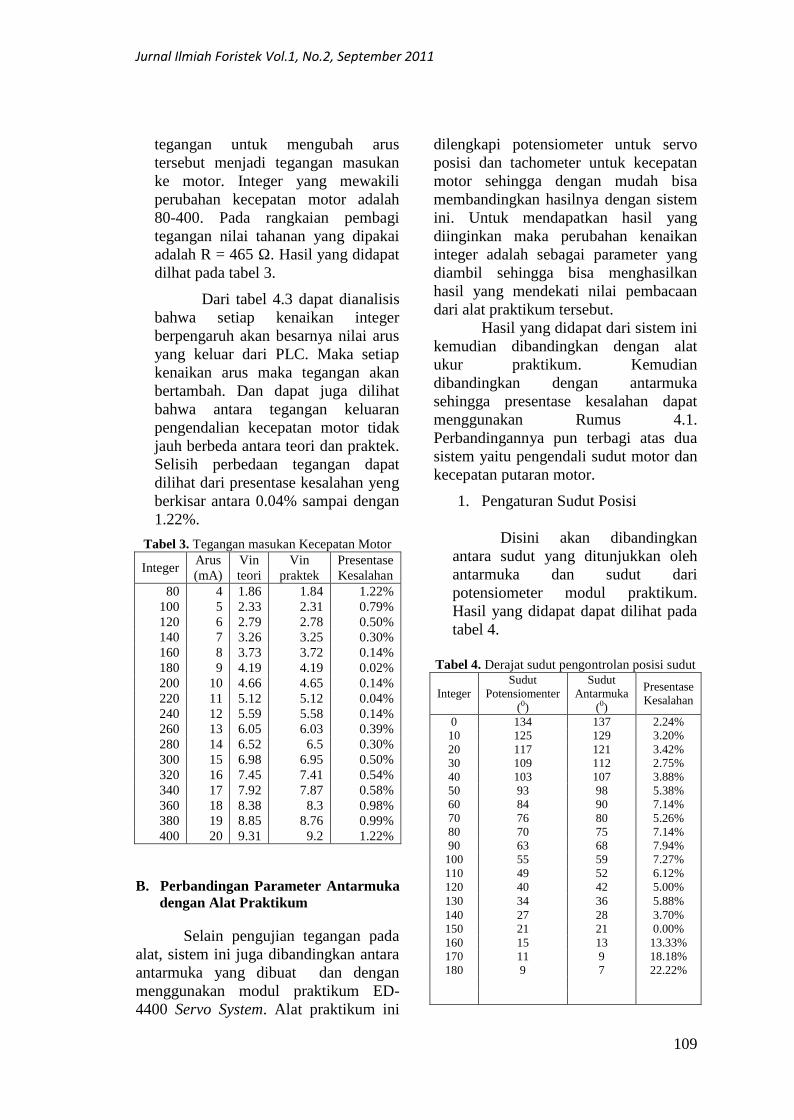
Antarmuka dari programkecepatan motor ini dapat dilihat padagambar 14 :
Gambar 14 Jendela Motor Speed
IV. PENGUJIAN DAN ANALISIS
Pada bagian ini akan dibahas apakahprogram antarmuka berjalan sesuai denganyang diinginkan dan melihat berapaparameter analog yang keluar dari PLCuntuk menggerakkan motor dan berapaparameter analog yang masuk ke PLCberasal dari potensiometer untuk pengaturansudut dan tachometer untuk pengaturankecepatan motor sebagai feedback darikendalian. Kemudian dianalisis parameteryang muncul di antarmuka danmembandingkannya dengan kenyataan agarbisa dianalisis berapa persentase kesalahandari parameter tersebut.
A. Pengujian Tegangan Masukan danKeluaran
Tujuan dari pengujian ini untukmembandingkan antara tegangan yangdapat dihitung secara teori dan teganganyang diukur secara praktek. Hasilperbandingan dari kedua data tersebutkemudian dilihat dalam persentasikesalahan. Rumus untuk melihatpersentase kesalahan adalah sebagaiberikut :
Teori - PraktekPK = -----------------------
(3)Teori
Pengujian ini dibagi atas dua yaitu pengujianpada bagian servo posisi dan pengujian padabagian pengontrolan kecepatan motor.
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
108
1. Pengaturan Servo Posisi
Bagian ini terdiri atas duabagian yaitu bagian teganganmasukan dan keluaran. Untukbagian tegangan masukan jarakkeluaran PLC antara 4-20 mA untukjarak Integer antara 0 – 180.Tegangan masukan secara teoridihitung dengan memakai nilaitahanan R = 606.5 Ω. Hasilnyadapat dilihat pada table 1.
Dari tabel 1 dapat dianalisisbahwa setiap kenaikan integerberpengaruh akan besarnya nilai arusyang keluar dari PLC. Maka setiapkenaikan arusm tegangan akanbertambah. Dan juga dapat terlihatbahwa antara tegangan masukanpengaturan servo posisi tidak jauhberbeda antara teori dan praktek.Selisih perbedaan tegangan dapatdilihat dari presentase kesalahan yengberkisar antara 0.08% sampai dengan0.82%.
Tabel 1. Tegangan masukan servo posisi
IntegerArus(mA)
Vinteori
(Volt)
Vinpraktek(Volt)
PresentaseKesalahan
0 4 2.43 2.44 0.58%10 4.89 2.97 2.99 0.82%20 5.78 3.51 3.53 0.70%30 6.67 4.05 4.06 0.36%40 7.56 4.59 4.6 0.32%50 8.45 5.12 5.15 0.49%60 9.34 5.66 5.68 0.27%70 10.23 6.20 6.22 0.25%80 11.12 6.74 6.75 0.08%90 12.01 7.28 7.29 0.08%
100 12.9 7.82 7.8 0.30%110 13.79 8.36 8.29 0.88%120 14.68 8.90 8.86 0.49%130 15.57 9.44 9.39 0.56%140 16.46 9.98 9.92 0.63%150 17.35 10.52 10.45 0.69%160 18.24 11.06 11 0.57%170 19.13 11.60 11.53 0.62%
180 20 12.13 12.07 0.49%
Untuk tegangan keluaran padapengaturan servo posisi makadibandingkan pula tegangan yangmasuk ke dalam PLC. Tegangantersebut dihitung secara teoritis
dengan menggunakan persamaan 1setelah dikonversi denganmenggunakan rangkaian pembagitegangan. Untuk tegangan sumbernyaberasal dari tegangan keluaran daripotensiometer, tahanan pertama R1 =500 Ω dan tahanan kedua R2 = 354.1Ω.
Dari tabel 2 dapat dianalisisbahwa untuk setiap kenaikan Integer,maka tegangan yang dihaslkan daripotensiometer akan naik. Dan jugadapat dilihat bahwa antara tegangankeluaran pengaturan servo posisitidak jauh berbeda antara teori danpraktek. Selisih perbedaan tegangandapat dilihat dari presentasekesalahan yeng berkisar antara 0.20%sampai dengan 1.55%.
Tabel 2. Tegangan Keluaran Servo Posisi
IntegerTeganganSumber(Volt)
Voutteori
(Volt)
Voutpraktek(Volt)
PresentaseKesalahan
0 2.85 1.18 1.17 0.98%10 3.38 1.40 1.38 1.52%20 3.92 1.63 1.6 1.55%30 4.46 1.85 1.83 1.03%40 4.99 2.07 2.04 1.39%50 5.53 2.29 2.27 0.99%60 6.09 2.52 2.49 1.38%70 6.64 2.75 2.71 1.56%80 7.15 2.96 2.94 0.82%90 7.57 3.14 3.13 0.27%
100 8.18 3.39 3.37 0.63%110 8.57 3.55 3.52 0.93%120 9.26 3.84 3.82 0.50%130 9.8 4.06 4.05 0.32%140 10.27 4.26 4.23 0.65%150 10.86 4.50 4.45 1.17%160 11.4 4.73 4.7 0.56%170 11.73 4.86 4.84 0.48%180 12.06 5.00 4.99 0.20%
2. Pengaturan Kecepatan MotorPerbandingan tegangan secara
teori dan praktik hanya digunakanpada tegangan keluaran mengingatpada tegangan keluaran rangkaianpembagi tegangan. PLCmengeluarkan arus keluaran antara 4-20 mA sehingga diperlukan rangkaian
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
109
tegangan untuk mengubah arustersebut menjadi tegangan masukanke motor. Integer yang mewakiliperubahan kecepatan motor adalah80-400. Pada rangkaian pembagitegangan nilai tahanan yang dipakaiadalah R = 465 Ω. Hasil yang didapatdilhat pada tabel 3.
Dari tabel 4.3 dapat dianalisisbahwa setiap kenaikan integerberpengaruh akan besarnya nilai arusyang keluar dari PLC. Maka setiapkenaikan arus maka tegangan akanbertambah. Dan dapat juga dilihatbahwa antara tegangan keluaranpengendalian kecepatan motor tidakjauh berbeda antara teori dan praktek.Selisih perbedaan tegangan dapatdilihat dari presentase kesalahan yengberkisar antara 0.04% sampai dengan1.22%.
Tabel 3. Tegangan masukan Kecepatan Motor
IntegerArus(mA)
Vinteori
Vinpraktek
PresentaseKesalahan
80 4 1.86 1.84 1.22%100 5 2.33 2.31 0.79%120 6 2.79 2.78 0.50%140 7 3.26 3.25 0.30%160 8 3.73 3.72 0.14%180 9 4.19 4.19 0.02%200 10 4.66 4.65 0.14%220 11 5.12 5.12 0.04%240 12 5.59 5.58 0.14%260 13 6.05 6.03 0.39%280 14 6.52 6.5 0.30%300 15 6.98 6.95 0.50%320 16 7.45 7.41 0.54%340 17 7.92 7.87 0.58%360 18 8.38 8.3 0.98%380 19 8.85 8.76 0.99%400 20 9.31 9.2 1.22%
B. Perbandingan Parameter Antarmukadengan Alat Praktikum
Selain pengujian tegangan padaalat, sistem ini juga dibandingkan antaraantarmuka yang dibuat dan denganmenggunakan modul praktikum ED-4400 Servo System. Alat praktikum ini
dilengkapi potensiometer untuk servoposisi dan tachometer untuk kecepatanmotor sehingga dengan mudah bisamembandingkan hasilnya dengan sistemini. Untuk mendapatkan hasil yangdiinginkan maka perubahan kenaikaninteger adalah sebagai parameter yangdiambil sehingga bisa menghasilkanhasil yang mendekati nilai pembacaandari alat praktikum tersebut.
Hasil yang didapat dari sistem inikemudian dibandingkan dengan alatukur praktikum. Kemudiandibandingkan dengan antarmukasehingga presentase kesalahan dapatmenggunakan Rumus 4.1.Perbandingannya pun terbagi atas duasistem yaitu pengendali sudut motor dankecepatan putaran motor.
1. Pengaturan Sudut Posisi
Disini akan dibandingkanantara sudut yang ditunjukkan olehantarmuka dan sudut daripotensiometer modul praktikum.Hasil yang didapat dapat dilihat padatabel 4.
Tabel 4. Derajat sudut pengontrolan posisi sudut
IntegerSudut
Potensiomenter(0)
SudutAntarmuka
(0)
PresentaseKesalahan
0 134 137 2.24%10 125 129 3.20%20 117 121 3.42%30 109 112 2.75%40 103 107 3.88%50 93 98 5.38%60 84 90 7.14%70 76 80 5.26%80 70 75 7.14%90 63 68 7.94%
100 55 59 7.27%110 49 52 6.12%120 40 42 5.00%130 34 36 5.88%140 27 28 3.70%150 21 21 0.00%160 15 13 13.33%170 11 9 18.18%180 9 7 22.22%
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
110
Data tabel 4 memperlihatkanprosentase kesalahan terbesar beradapada awal posisi yaitu pada integer180 sampai 160 yaitu diatas 10%. Inidisebabkan karena jauhnya perbedaantegangan yang masuk dan pembacaanpada integer. Kemudian penyebabbesarnya perbedaan sudut karenakurang akuratnya potensiometerdalam memberikan tegangan yangmasuk ke dalam masukan analogmenyebabkan PLC kurang tepatmembaca sudut yang ditunjukkanoleh potensiometer. Dan juga masihadanya selisih perbedaan teganganyang masuk ke dalam rangkaianpenjumlah tegangan modulpraktikum. Selisih tegangan tersebutsangat kecil sehingga menyebabkanmotor tidak berputar karena tidakcukup tegangan untuk memutarmotor. Selisih perbedaan sudut posisidapat dilihat dari presentasekesalahan yeng berkisar antara 2.24%sampai dengan 22.22%.
2. Pengaturan Kecepatan Motor
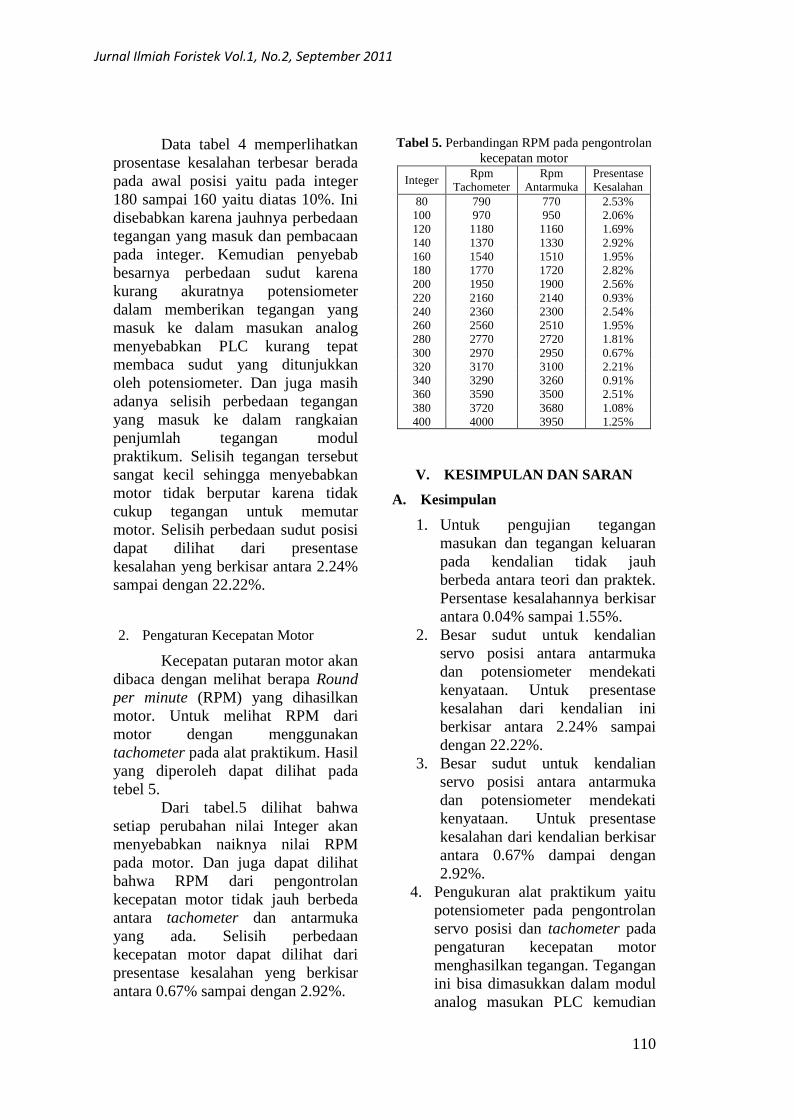
Kecepatan putaran motor akandibaca dengan melihat berapa Roundper minute (RPM) yang dihasilkanmotor. Untuk melihat RPM darimotor dengan menggunakantachometer pada alat praktikum. Hasilyang diperoleh dapat dilihat padatebel 5.
Dari tabel.5 dilihat bahwasetiap perubahan nilai Integer akanmenyebabkan naiknya nilai RPMpada motor. Dan juga dapat dilihatbahwa RPM dari pengontrolankecepatan motor tidak jauh berbedaantara tachometer dan antarmukayang ada. Selisih perbedaankecepatan motor dapat dilihat daripresentase kesalahan yeng berkisarantara 0.67% sampai dengan 2.92%.
Tabel 5. Perbandingan RPM pada pengontrolankecepatan motor
IntegerRpm
TachometerRpm
AntarmukaPresentaseKesalahan
80 790 770 2.53%100 970 950 2.06%120 1180 1160 1.69%140 1370 1330 2.92%160 1540 1510 1.95%180 1770 1720 2.82%200 1950 1900 2.56%220 2160 2140 0.93%240 2360 2300 2.54%260 2560 2510 1.95%280 2770 2720 1.81%300 2970 2950 0.67%320 3170 3100 2.21%340 3290 3260 0.91%360 3590 3500 2.51%380 3720 3680 1.08%400 4000 3950 1.25%
V. KESIMPULAN DAN SARAN
A. Kesimpulan
1. Untuk pengujian teganganmasukan dan tegangan keluaranpada kendalian tidak jauhberbeda antara teori dan praktek.Persentase kesalahannya berkisarantara 0.04% sampai 1.55%.
2. Besar sudut untuk kendalianservo posisi antara antarmukadan potensiometer mendekatikenyataan. Untuk presentasekesalahan dari kendalian iniberkisar antara 2.24% sampaidengan 22.22%.
3. Besar sudut untuk kendalianservo posisi antara antarmukadan potensiometer mendekatikenyataan. Untuk presentasekesalahan dari kendalian berkisarantara 0.67% dampai dengan2.92%.
4. Pengukuran alat praktikum yaitupotensiometer pada pengontrolanservo posisi dan tachometer padapengaturan kecepatan motormenghasilkan tegangan. Teganganini bisa dimasukkan dalam modulanalog masukan PLC kemudian
Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
111
dikelola oleh antarmuka yangdibuat.
B. Saran
1. Kebutuhan PLC sebagai sistemkendali pada industri dewasa inisehingga sangat bagus dipelajari.Namun karena tidak adanya matakuliah tentang topik ini sehinggadisarankan untuk menyeleraskanmata kuliah yang ada dengantopik ini.
2. Untuk modul keluaran analog,lebih baik diganti dengan modelAllen Breadley 1771 - OFE1Byang keluarannya berupategangan sehingga tidak perlulagi dikonversi menggunakanrangkaian pembagi tegangan.
3. Antarmuka dan program ladderdiagram dibuat lebih banyak fituryang memanfaatkan kecepatandan sudut posisi motor sehinggaaplikasinya lebih berguna.
DAFTAR PUSTAKA
Usman, S & Natsir, A 2003, PengendalianSuhu Ruangan DenganProgrammable Logic Control-5(PLC-5 Allen Breadley), JurusanElektro Fakultas Teknik UniversitasHasanuddin, Makassar.
Rais, A S & Machmoed, F 2004,Perancangan Man MachineInterface Pada Pengendali SuhuRuangan Dengan MenggunakanProgram Wonderware, JurusanElektro Fakultas Teknik UniversitasHasanuddin, Makassar.
Bolton, W 2004, Programmable LogicControl (PLC) Sebuah PengantarEdisi Ketiga, Penerbit Erlangga,Jakarta.
Setiawan, I 2006, Programmable LogicController (PLC) dan Teknikperancangan Sistem Kontrol,Penerbit Andi, Yogyakarta.
Wikipedia 2011, viewed june 13th 2011, <http://en.wikipedia.org/wiki/Voltage_divider >
Allen Breadley 1999, Analog Input Module(Cat. No. 1771-IFE Series C) UserManual, Rockwell AutomationAllen Breadley Inc., USA.
Allen Breadley 1999, Analog OutputModule (Cat. No. 1771-OFE SeriesB) User Manual, RockwellAutomation Allen Breadley Inc.,USA.
ED Co., Ltd. 2006, ED-4400B DC ServoTrainer Instruction Manual, ED Co.,Ltd., SeongNam-City, South Korea

Jurnal Ilmiah Foristek Vol.1, No.2, September 2011
112