semester v
TRANSCRIPT

SEMESTER V
INSTRUMENTATION AND CONTROL ENGINEERING
ICT301 INDUSTRIAL INSTRUMENTATION I CATEGORY L T P CREDIT PCC 3 1 0 4
Preamble:
The aim of the Industrial Instrumentation-1 course is to familiarize the students about various types of temperature, pressure, level, pH, density,viscosity, turbidity and conductivity measurement systems and also to introduce the basic concepts of Industrial wireless technology.
Prerequisite:
Basics of instrumentation Engineering and Transducers.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Explain working principle and measurement techniques of various typesof temperature measuring instruments and will be able to describe about temperature compensation techniques using in thermocouples and RTD.
CO 2 Discuss working principle and measurement techniques of various typesof pressure measuring instruments.
CO 3 Explain working principle and measurement techniques of various typesof level measuring instruments.
CO 4 Describe working principle and measurement techniques of various typesof density,pH and viscosity measuring instruments.
CO 5 Discuss working principle and measurement techniques of various typesof conductivity and turbidity measuring instruments and will be able to explain about basics of Industrial Wireless Technology.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 3 CO 2 3 3 CO 3 3 3 CO 4 3 3 CO 5 3 3
INSTRUMENTATION AND CONTROL ENGINEERING
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 50 50 100 Apply Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Explain about the construction and working of optical radiation pyrometer.
2. Describe the working principle of liquid in gas type thermometer.
3. Explain about 3 wire RTD Compensation method.
4. Explain about cold junction compensation techniques.
Course Outcome 2 (CO2):
1. Explain how pressure can be measured using U tube manometer.
2. With the help of a diagram, explain the working of Knudsen gauge.
Course Outcome 3 (CO3):
INSTRUMENTATION AND CONTROL ENGINEERING
1. Explain working of float level switch.
2. How bubbler system can be used to measure level? Explain.
Course Outcome 4 (CO4):
1. How density can be measured using hydrometer?
2. Explain about digital pH meter.
Course Outcome 5 (CO5):
1. How conductivity can be measured using two electrode cells?2. Explain turbidity measurement using forward and backscatter turbidity analyser.3. Explain about radio noise related with wireless technology.4. Explain standards and specifications using in wireless technology.
Model Question paper
Course Code: ICT301
Course Name:INDUSTRIAL INSTRUMENTATION I
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Explain about 3 wire RTD Compensation method.2. Explain Peltier and Seebeck effect.3. Explain how pressure can be measured using U tube manometer.4. Explain about units and definitions of pressure.5. Explain working of float level switch.6. How bubbler system can be used to measure level? Explain.7. How density can be measured using hydrometer?8. Explain about digital pH meter.9. How conductivity can be measured using two electrode cells.10. Explain about radio noise related with wireless technology.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. (a) Explain about the construction and working of optical radiation pyrometer. (7)
INSTRUMENTATION AND CONTROL ENGINEERING
(b) What are vapour pressure thermometers? Explain its working with diagram. (7) 12. (a) Explain about 3 wire and 4 wire RTD Compensation method. (7)
(b) Describe the working principle of liquid in gas type thermometer. (7)
Module 2
13. (a) With the help of diagram explain the construction and working of ionization Gauges. (7) (b) Explain in detail about pressure measuring strain gauge. (7)
14. (a) Explain about the construction and working principle of pirani gauge. (7) (b) With the help of a diagram, explain the working of Knudsen gauge. (7)
Module 3
15. How level switches operate? Explain working of field effect and diaphragmlevel switch.
16. Explain working principle of laser level detectors. Also explain working of time-ofreflection and triangular measurement technique using laser level detector.
Module 4
17. Explain about measurement electrodes using in pH measurement.
18. Explain viscosity measurement using Saybolt and falling ball viscometer.
Module 5
19. Explain turbidity measurement using forward and backscatter turbidity analyser.
20. Explain standards and specifications using in wireless technology.
Syllabus
INDUSTRIAL INSTRUMENTATION I
Module 1 (8 Hours)
Measurement of Temperature
Definitions and units- Standards of temperature – Thermometry and pyrometry- Thermocouples- Peltier effect- Thomson effect- Seebeck effect- Types of thermocouples (Chromel- copper. Chromel- alumel.copper-constantan, iron-constantan, platinum-rhodium- platinum) Cold junction compensation-Signal conditioning for thermocouple-Thermowells-– Thermopiles- Resistance thermometers- Principle of operation- Platinum RTD- Construction of RTDs- Lead compensation- 3wire method – 4 wire method- Thermistors – Quartz crystal sensors-Expansion thermometers- Bimetallic thermometers – Liquid filled thermometers- Gas filled thermometers- Vapor pressure thermometers- Pyrometry- Stefan Boltzmann’s law-
INSTRUMENTATION AND CONTROL ENGINEERING
Black body radiation- Total radiation pyrometers-Optical radiation pyrometers-Disappearing filament photo electric pyrometer
Module 2 (10 Hours)
Measurement of Pressure
Introduction – units and definitions – standards of pressure – bellows type pressure sensors: motion balance and force balance pressure sensors, C-bourdon, spiral and helical bourdon pressure sensors-Diaphragm or capsule type sensors: motion balance and force balance pressure sensors-Differential pressure elements: dry, force balance and dry, motion balance-Electronic pressure sensors: strain gauge, Capacitance, Potentiometric, Resonant wire, Piezoelectric, Magnetic and Optical transducers, High-Pressure sensors: Dead-Weight piston gauge, Bulk modulus cells, Manometers: U tube manometer – inclined manometer- ring balanced type manometer, Micromanometers. Vacuum pressure measuring elements- McLeod gauge –ionization gauges – Knudsen gauge – momentum transfer gauges- thermal conductivity gauges – Pirani’s gauge.
Module 3 (10 Hours)
Level measurement
Bubblers-Capacitance level sensors-Level switches; field effect and diaphragm switch, Differential pressure level detector: electronic d/p transmitters, displacer level detectors: torque tube displacer, interface measurement, Float level devices: float level switch, Laser level detectors: triangular measurement, time-of-reflection measurement. Level gauges: Flat glass gauge, magnetic level gauge, remote reading gauge, Optical level devices; Light reflection, transmission and refraction. Radar level transmitters: time-of flight determination, radiation level sensor; continuous level measurement, Rotating paddle switch
Module 4 (8 Hours)
Density Measurement
Displacement and float type,hydrometer,hydrostatic densitometers.Radiation densitometer,vibrating densitometer,gas densitometers.
pH measurement
Theory-Measurement electrodes-Fibre-optic pH measurement-digital pH meters- amplifiers for pH electrodes.
Viscosity measurement
INSTRUMENTATION AND CONTROL ENGINEERING
Laboratory types: Rotational, Saybolt, Redwood , Falling ball and Capillary tube viscometers. Industrial types –Capillary type of viscosity measurements-Falling piston-float viscometer –Oscillating blade.
Module 5 (9 Hours)
Conductivity Measurement
Theory of operation,Two electrode cells,Four electrode measurement,electrodeless cell.
Turbidity measurement
Forward scattering type,scattered light detectors,backscatter turbidity analyzer.
Industrial Wireless Technology
Basics: RF signals, Radio bands, Radio noise, SNR, wireless reliability, Fixed frequency, Spred spectrum, Security, Antennas, Antenna connection, Mesh Technologies, System Management, System Interfaces, Standards and specifications.
Text Books
1. Liptak.B.G , “Instrument Engineers Handbook Volume 1”, Chilton book.co.
2. Jones.E.B, “Instrument technology”, Scientific Pub.
3. Walt Boyes, “Instrumentation Reference Book”, Elsevier, 4/e.
4. Andrew and Williams, “Applied Instrumentation in Process Industries”, Gulfpublications Volume 1,2.
Reference Books
1. Jain.R.K,, “Mechanical and Industrial Measurements”, Khanna Publishers.
2. Patranabis.D, “Principles of Industrial Instrumentation”, Tata McGraw Hill.
3. Doebelin.E.O, “Measurement System - Application and Design”, McGraw hill.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Module 1
1.1 Definitions and units- Standards of temperature – Thermometry and pyrometry- Thermocouples- Peltier effect- Thomson effect-
1
INSTRUMENTATION AND CONTROL ENGINEERING
Seebeck effect 1.2 Types of thermocouples (Chromel- copper. Chromel- alumel.
copper-constantan, iron-constantan, platinum-rhodium- platinum)- Cold junction compensation
1
1.3 Signal conditioning for thermocouple-Thermowells-– Thermopiles- Resistance thermometers- Principle of operation- Platinum RTD
1
1.4 Construction of RTDs- Lead compensation- 3wire method- 4 wire method- Thermistors – Quartz crystal sensors
1
1.5 Expansion thermometers- Bimetallic thermometers – Liquid filled thermometers- Gas filled thermometers- Vapor pressure thermometers
2
1.6 Pyrometry- Stefan Boltzmann’s law- Black body radiation- Total radiation pyrometers-Optical radiation pyrometers-Disappearing filament photo electric pyrometer
2
2 Module 2
2.1 Introduction – units and definitions – standards of pressure – bellows type pressure sensors: motion balance and force balance pressure sensors
1
2.2 bourdon,spiral and helical bourdon pressure sensors-Diaphragm or capsule type sensors: motion balance and force balance pressure sensors
2
2.3 Differential pressure elements:dry,force balance and dry,motion balance
1
2.4 Electronic pressure sensors: strain gauge, Capacitance, Potentiometric, Resonant wire, Piezoelectric, Magnetic and Optical transducers
2
2.5 High-Pressure sensors:Dead-Weight piston gauge,Bulk modulus cells,
1
2.6 Manometers: U tube manometer – inclined manometer- ring balanced type manometer,Micromanometers
1
2.7 Vacuum pressure measuring elements- McLeod gauge –ionization gauges – Knudsen gauge – momentum transfer gauges- thermal conductivity gauges – Pirani’s gauge
2
3 Module 3
3.1 Bubblers-Capacitance level sensors-Level switches; field effect and diaphragm switch
2
3.2 Differential pressure level detector: electronic d/p transmitters, displacer level detectors: torque tube displacer,
1
3.3 interface measurement, Float level devices: float level switch, Laser level detectors: triangular measurement, time-of-reflection measurement
3
INSTRUMENTATION AND CONTROL ENGINEERING
3.4 Level gauges: Flat glass gauge, magnetic level gauge, remote reading gauge, Optical level devices; Light reflection, transmission and refraction
2
3.5 Radar level transmitters: time-of flight determination, radiation level sensor; continuous level measurement, Rotating paddle switch
2
4 Module 4
4.1 Displacement and float type, hydrometer, hydrostatic densitometers. Radiation densitometer, vibrating densitometer, gas densitometers
3
4.2 Theory-Measurement electrodes-Fibre-optic pH measurement-digital pH meters- amplifiers for pH electrodes
2
4.3 Laboratory types:Rotational, Saybolt,Redwood, Falling ball and Capillary tube viscometers. Industrial types –Capillary type of viscosity measurements-Falling piston-float viscometer –Oscillating blade
3
5 Module 5 5.1 Theory of operation, Two electrode cells, Four electrode
measurement, electrodeless cell 2
5.2 Forward scattering type, scattered light detectors, backscatter turbidity analyzer
2
5.3 Basics: RF signals, Radio bands, Radio noise, SNR, wireless reliability, Fixed frequency, Spred spectrum, Security, Antennas, Antenna connection, Mesh Technologies, System Management, System Interfaces, Standards and specifications
5
INSTRUMENTATION AND CONTROL ENGINEERING
ICT303 CONTROL ENGINEERING II CATEGORY L T P CREDIT PCC 3 1 0 4
Preamble
The aim of the Control Engineering II course is to offer students the fundaments of the analysis of frequency domain characteristics & stability of continuous LTI systems, modelling & analysis of continuous LTI systems in state-space, and design of compensators to meet the desired specifications or characteristics.
Prerequisite:
Mathematics course in differential equations and Laplace transform, basic electrical network analysis, and ICT206 Control Engineering I course.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Analyse the linear time invariant system in frequency domain.
CO 2 Analyse the stability of continuous linear-time invariant system.
CO 3 Design a compensator for a linear time invariant system to meet the desired time domain or frequency domain specifications using root-locus or bode plot techniques respectively.
CO 4 Develop state variable model of the continuous LTI system and construct state diagrams.
CO 5 Analyse forced and unforced continuous LTI systems by obtaining a state transition matrix.
CO 6 Design state variable feedback Controllers and full order state observers for continuous LTI systems.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 3 3 3 CO 2 3 3 3 3 CO 3 3 3 3 3 2 CO 4 3 3 CO 5 3 3 2 3 2 CO 6 3 3 3 3 2
INSTRUMENTATION AND CONTROL ENGINEERING
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 15 15 30 Apply 25 25 50 Analyse 10 10 20 Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer anyone. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
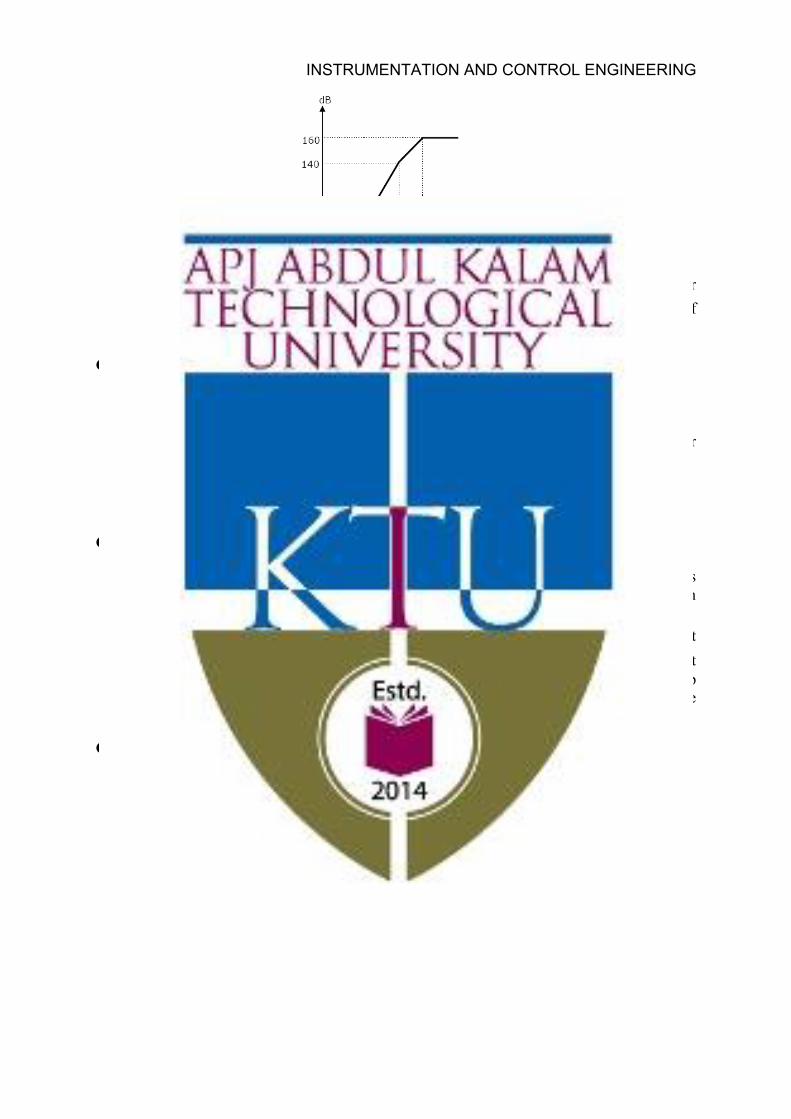
1. Bode plot of a system is shown below. Predict the transfer function.
INSTRUMENTATION AND CONTROL ENGINEERING
2. Draw the bode-plot (in semi-log graph sheet) of the open-loop system with a transfer function 𝐺𝐺(𝑆𝑆) = 20(𝑆𝑆+1)
𝑆𝑆(𝑆𝑆2+2𝑆𝑆+10)(𝑆𝑆+5). Analyse the dynamic and static characteristics of this system.
Course Outcome 2 (CO2):
1. Gain crossover frequency and phase crossover frequency of an open-loop system are respectively 2rad/Sec and 2.3rad/Sec. Analyse the stability of this system.
2. Consider a unity feedback control system with the following open loop transfer
function 𝐺𝐺(𝑆𝑆) = 𝑆𝑆2+2𝑆𝑆+1𝑆𝑆3+0.2𝑆𝑆2+𝑆𝑆+1
.
Draw a Nyquist plot of G(S) and examine the stability of the closed-loop system.
Course Outcome 3 (CO3):
1. Root locus of a system is passing through dominant pole, but static error constant is not satisfactory. Suggest a cascade compensator for this system, and give an explanation.
2. Consider a system with forward path transfer function 𝐺𝐺(𝑆𝑆) = 820𝑆𝑆(𝑆𝑆+10)(𝑆𝑆+20) and unit
negative feedback. Design a lag cascade compensator to meet the static error constant 𝐾𝐾𝑉𝑉 = 41𝑠𝑠𝑠𝑠𝑠𝑠−1. It is also desired to keep the damping ratio of dominant closed loop poles constant at zeta=0.7. A small change in the undamped natural frequency of the dominant closed loop poles is permissible.
Course Outcome 4 (CO4):
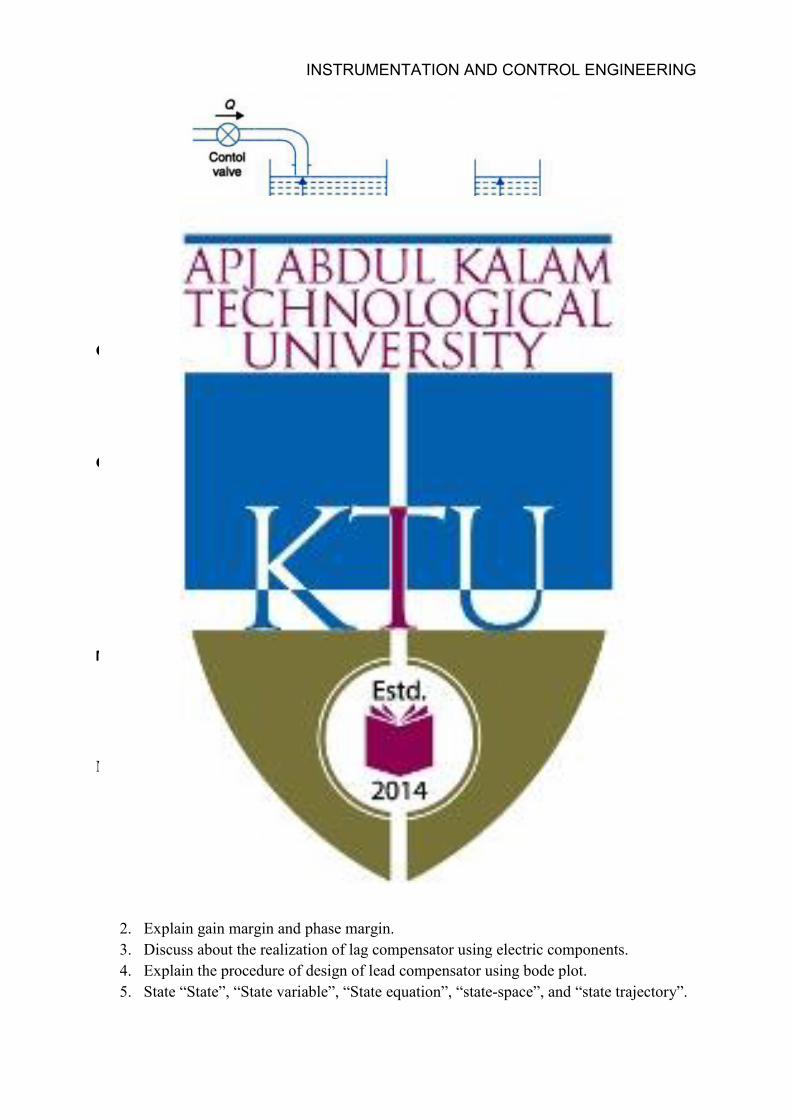
1. Derive the state-space model of following liquid level system. Take liquid head H2 as output and flow Q as input.
INSTRUMENTATION AND CONTROL ENGINEERING
Course Outcome 5 (CO5):
1. Check the controllability of following state-space model if 𝑥𝑥1(𝑡𝑡) = 𝑥𝑥2(𝑡𝑡).
𝑥(𝑡𝑡) = 𝑎𝑎 𝑏𝑏𝑠𝑠 𝑑𝑑 𝑥𝑥
(𝑡𝑡) + 𝑠𝑠𝑓𝑓 𝑢𝑢(𝑡𝑡)
Course Outcome 6 (CO6):
1. Find out the state feedback gain matrix K for the following system such that theclosed loop poles are located at 0.5, 0.6, and 0.7.
𝑥 = 0 1 00 0 1−1 −2 −3
𝑥𝑥 + 001 𝑢𝑢
Model Question paper
Course Code: ICT303
Course Name:Control Engineering II
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Differentiate minimum phase and non-minimum phase systems.2. Explain gain margin and phase margin.3. Discuss about the realization of lag compensator using electric components.4. Explain the procedure of design of lead compensator using bode plot.5. State “State”, “State variable”, “State equation”, “state-space”, and “state trajectory”.
INSTRUMENTATION AND CONTROL ENGINEERING
6. Derive the transfer function from general state-space representation of a continuous linear time invariant system.
7. Write the properties of State-transition matrix. 8. Discuss about controllability. 9. Discuss about different types of phase trajectories. 10. Explain about state observer.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. Consider a unity feedback control system with the following open loop transfer
function 𝐺𝐺(𝑆𝑆) = 𝑆𝑆2+2𝑆𝑆+1𝑆𝑆3+0.2𝑆𝑆2+𝑆𝑆+1
.
Draw a Nyquist plot of G(S) and examine the stability of the closed-loop system.
12. Draw the bode-plot (in semi-log graph sheet) of the open-loop system with a transfer
function𝐺𝐺(𝑆𝑆) = 20(𝑆𝑆+1)𝑆𝑆(𝑆𝑆2+2𝑆𝑆+10)(𝑆𝑆+5). Also find the gain margin and phase margin of this
system.
Module 2
13. Consider a system with forward path transfer function 𝐺𝐺(𝑆𝑆) = 820𝑆𝑆(𝑆𝑆+10)(𝑆𝑆+20) and unit
negative feedback. Design a lag cascade compensator to meet the static error constant 𝐾𝐾𝑉𝑉 = 41𝑠𝑠𝑠𝑠𝑠𝑠−1. It is also desired to keep the damping ratio of dominant closed loop poles constant at zeta=0.7. A small change in the undamped natural frequency of the dominant closed loop poles is permissible.
14. Consider a system with forward path transfer function 𝐺𝐺(𝑆𝑆) = 1𝑆𝑆(𝑆𝑆+1)(0.5𝑆𝑆+1) and unit
negative feedback. Design a lag cascade compensator such that the steady state error to a unit ramp input is 0.2sec, the phase margin is at least 40𝑜𝑜 , and the gain margin is at least 10dB.
Module 3
15. Consider the electrical network shown below. Develop the state space model of this system in the controllable canonical form.
INSTRUMENTATION AND CONTROL ENGINEERING
16. A feedback system is characterised by the transfer function 𝐺𝐺(𝑆𝑆) = 𝑆𝑆2+3𝑆𝑆+3𝑆𝑆3+2𝑆𝑆2+3𝑆𝑆+1
. Find the Jordan canonical form of this system.
Module 4
17. Consider the system matrix of the state-space model 𝐴𝐴 = 0 5−1 −6. Find the state
transition matrix 𝜙𝜙(𝑡𝑡) using Cayley-Hamilton theorem.
18. Consider a state-space model 𝑥 = 1 01 1 𝑥𝑥 + 10 𝑢𝑢 where u is a unit step function.
Find the solution of this system, assuming the initial condition 𝑥𝑥0 = 10
Module 5
19. Analyze the singular point of following system after constructing the phase trajectory using Isocline method.
𝑑𝑑2𝑥𝑥𝑑𝑑𝑡𝑡2 + 0.3
𝑑𝑑𝑥𝑥𝑑𝑑𝑡𝑡
+ 𝑥𝑥 = 0
where 𝑥𝑥(0) = 1.5 and 𝑑𝑑𝑥𝑥 (0)𝑑𝑑𝑡𝑡
= 0.
20. Consider a system with state-space model
𝑥 = 0 6−1 −5 𝑥𝑥 + 11 𝑢𝑢;𝑦𝑦 = [0 1]𝑥𝑥; 𝑥𝑥(0) = 01
Develop state-variable feedback for the above open-loop system so that the closed-loop roots are 𝑆𝑆1,2 = −1 + 𝑗𝑗.
Syllabus
CONTROL ENGINEERING II
Module 1 (10 Hours)
Frequency Response Analysis
Frequency response representation; sinusoidal transfer function; second order system and frequency domain specifications; correlation and frequency domain specifications; Polar plots; Bode plots; All-pass and minimum-phase systems; experimental determination of transfer function
Stability in Frequency Domain
Gain margin and phase margin; Stability from Bode plot; Nyquist stability criterion; assessment of relative stability using Nyquist criterion; transportation lag; Nichols chart (case study).
INSTRUMENTATION AND CONTROL ENGINEERING
Module 2 (10 Hours)
Design of Cascade Compensators
Design problem; Dominant pole; realization of basic compensators: lead compensator, lag compensator, and lag-lead compensator; cascade compensation using root-locus: lead compensation, lag compensation, and lead-lag compensation; cascade compensation using bode plot: lag compensation, lead compensation, and lag-lead compensation.
Feedback compensation (case study).
Module 3 (9 Hours)
State SpaceModelling of Continuous Linear Time Invariant Systems
Concept of state, state variables, and state model; state models for linear continuous-time systems; state space representation using physical variables; transfer function from the state space model; transformation of state space model and invariance property; state space representation using phase variables; Jordan canonical form; Diagonalization.
State-space model of discrete system (case study).
Module 4 (8 Hours)
State Variable Analysis of Continuous LTI Systems
Solution of state equation; properties of state transition matrix; computation of state-transition matrix; controllability and observability.
Module 5 (8 Hours)
State Variable Design (Continuous)
Pole placement by state variable feedback; state observer (full order).
Stability analysis of Continuous LTI Systems using Phase Plane Method Phase Trajectory and Phase plane; Singular point; classification of singular points; construction of single-phase trajectory using Isoc line and delta method.
Text Books
1. I. J. Nagrath and M. Gopal, “Control Systems Engineering”, New Age International Pvt Ltd, 6/e.
2. Katsuhiko Ogata, “Modern Control Engineering”, Pearson Education India, 5/e.
3. Farid Golnaraghi and Benjamin C. Kuo, “Automatic Control Systems”, McGraw Hill Education (India) Pvt. Ltd., 10/e.
INSTRUMENTATION AND CONTROL ENGINEERING
4. M. Gopal, “Control Systems Principles and Design”, McGraw Hill Education (India)Pvt. Ltd., 4/e.
Reference Books
1. Richard C. Dorf and Robert H. Bishop, “Modern Control Systems”, Pearson, 12/e.
2. A. K. Jairath, “Control Systems with Essential Theory”, CBS Publishers andDistributors Pvt Ltd.
3. B. S. Manke, “Linear Control Systems with MATLAB Applications”, KhannaPublishers, 12/e.
4. M. Gopal, “Digital Control and State Variable Methods”, McGraw Hill Education(India) Pvt. Ltd., 4/e.
5. Joseph J. Distefano III, Allen R. Stubberud& Ivan J. Williams, “Control Systems”,McGraw Hill Education (India) Pvt. Ltd., 3/e.
6. D. Ganesh Rao & K. Chenna Venkatesh, “Control Engineering”, Cengage IndiaPrivate Limited, 1/e.
7. Francis H. Raven, “Automatic Control Engineering”, McGraw Hill Education, 5/e.
8. Norman S. Nise, “Control Systems Engineering”, Wiley.
9. V. Krishnamurthi, “Control Systems”, CBS Publishers and Distributors Pvt Ltd, 1/e.
10. K. Alice Mary and P. Ramana, “Control Systems”, Orient Blackswan Pvt Ltd.
11. A. NagoorKani, “Control Systems”, CBS Publishers and Distributors Pvt Ltd.
12. A. Anand Kumar, “Control Systems”, PHI, 2/e.
13. KR Varmah, “Modern Control Theory”, CBS Publishers and Distributors Pvt Ltd.
14. D. Roy Choudhury, “Modern Control Engineering”, PHI.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Frequency Response Analysis (7 Hours)
1.1 Frequency response representation; sinusoidal transfer function; Second order system and frequency domain specifications; correlation of time and frequency domain specifications.
2 Hours
1.2 Frequency response plots; polar plots; Bode Plots 4 Hours 1.3 All pass, minimum phase and non-minimum phase systems. 1 Hour
Stability in Frequency Domain (3 Hours)
INSTRUMENTATION AND CONTROL ENGINEERING
1.4 Stability in frequency domain; relative stability, gain margin and phase margin; stability from bode plots; transportation lag.
1 Hour
1.5 Nyquist stability criterion; assessment of relative stability using Nyquist criterion.
2 Hours
2 Design of Cascade Compensators (10 Hours)
2.1 Dominant pole; realization of basic compensators: lead compensator, lag compensator, and lag-lead compensator.
3 Hours
2.2 Cascade compensation using root-locus: lead compensation, lag compensation, and lead-lag compensation
3 Hours
2.3 Cascade compensation using bode plot: lag compensation, lead compensation, and lag-lead compensation.
3 Hours
2.4 Feedback compensation (case study). 1 Hour 3 State Space Modelling of Continuous Linear Time Invariant Systems (9
Hours)
3.1 Concept of state, state variable, state vector and state space; State models for linear continuous time systems; State variable representation of continuous time systems using physical variables.
2 Hours
3.2 Transfer function from state variable model; transformation of state variables and invariance property
2 Hours
3.3 State space representation using phase variable (state space representation from transfer function): Controllable canonical form, observable canonical form.
2 Hours
3.4 Jordan canonical form; diagonalization. 2 Hours 3.5 State-space model of discrete systems (case study) 1 Hours 4 State Variable Analysis of Continuous LTI Systems (8 Hours)
4.1 Solution of state equation; state transition matrix; properties of state transition matrix.
1 Hour
4.2 Computation of the state transition matrix using Lyapunov’s method.
2 Hours
4.3 Computation of the state transition matrix using Cayley Hamilton theorem.
2 Hours
4.4 Response of homogeneous and non-homogeneous systems. 2 Hours 4.5 Concept of controllability and observability; Gilbert test and
Kalaman test. 1 Hour
5 State Variable Design (Continuous) (4 Hours)
5.1 Design of state variable feedback if the given model is in the controllable canonical form; design of arbitrary state variable feedback if the given model is not in controllable canonical form.
2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
5.2 Design of full order state observer; application of duality principle.
2 Hours
Stability analysis of Continuous LTI Systems using Phase Plane Method (4 Hours)
5.3 Singular points, classification of singular points. 2 Hours 5.4 Construction of single-phase trajectory using Isoc line and delta
method. 2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICT305 MICROCONTROLLERS CATEGORY L T P CREDIT PCC 3 1 0 4
Preamble:
The course introduces the basic concepts and architectures of microprocessors and microcontrollers. Intel 8051 microcontroller is discussed in detail focusing on its architecture, ports, timers, serial communication, interrupts, interfacing with peripherals and its programming. In addition, the course also offers the basic ideas of AVR processors as a higher end example. A study of a microcontroller-based system, Arduino,is also included in the course to make the students capable of implementing practical solutions built around microcontrollers.
Prerequisite:
Digital electronics, Basics of Electrical and electronics engineering, basic ideas on programming.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 To explain the Evolution and Classification of microcontrollers and generalize the architecture of 8051 microcontroller and its instruction sets and addressing modes.
CO 2 To demonstrate machine, assembly and high-level languages and also capable of performing simple C and assembly language programming in ports and timers of 8051.
CO 3 To program 8051 using assembly and C languages for complex problems involving serial communication and interrupt.
CO 4 To explain the Interfacing of memory, LCD, matrix keyboard, stepper motor, DC motor, ADC, DAC, sensors, and relays to 8051 microcontrollers.
CO 5 To explain the architecture of AVR and Arduino ATmega 32 microcontrollers and its features.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 1 3 CO 2 3 2 1 1 3 CO 3 3 2 1 1 3 CO 4 3 1 3
INSTRUMENTATION AND CONTROL ENGINEERING
CO 5 3 1 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember 10 10 Understand 20 30 50 Apply 20 20 40 Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. What is the purpose of PSW register and program counter in 8051?
2. Explain the internal memory organization of microcontroller 8051 with a neat diagram.
3. Explain the following instruction sets of 8051 (i) Compare and rotate instructions (ii) Bit processing instructions.
Course Outcome 2 (CO2):
INSTRUMENTATION AND CONTROL ENGINEERING
1. Write an 8051 c program to get a byte of data from port 0 .if it is less than 70, send itto Port 2, and otherwise, send it to port 1.
2. Write an assembly language program to add the first ten natural numbers.
3. Explain the steps to program timer 1 in mode 2.
Course Outcome 3 (CO3):
1. Write an assembly language program for 8051 to generate a square wave of 50Hzfrequency on p1.2 using interrupt for timer T0. Assume that XTAL=11.0592 MHz.
2. Write 8051 C programming to receive bytes of data serially and put them in P1. Setthe baud rate as 4800, 8-bit data and one stop bit.
3. Explain how 8051 transmits character and receive character serially using ALP.
Course Outcome 4 (CO4):
1. Explain, with a neat block diagram step by step procedure involved to interface 4×4matrix keyboard with 8051.
2. With a block diagram, explain the operation of LCD interfacing with 8051.
3. Draw and explain the interfacing diagram of ADC with 8051 microcontrollers.
Course Outcome 5 (CO5):
1. How many general-purpose registers does the AVR processor have? Explain it.
2. What is the difference between Program counter and Flash memory in AVR?
3. Explain in detail and Draw the block diagram of AT mega 32 microcontroller with aneat sketch.
Model Question paper
Course Code: ICT305
Course Name:MICROCONTROLLERS
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Discuss in brief oscillator and clock circuit in the 8051-micro controller.2. Compare microprocessor with micro controller.3. Explain TMOD registers of 8051.
INSTRUMENTATION AND CONTROL ENGINEERING
4. Detail about TMOD register and what its advantages and disadvantages of MODE2 operation of 8051 timers when compared MODE1 Operation
5. Discuss the interrupt vector table. 6. What is the need of SBUFF register in serial communication? 7. Explain the use of register select, Read/Write, Enable pin of LCD. 8. What is the keyboard debouncing? How it is solved by software in the matrix
keyboard? 9. Write a note on TIMSK register in AVR. 10. Discuss the general-purpose register in AVR.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. (a) Discuss stack and stack pointer. (6 Marks) (b) Explain the different modes of addressing used in 8051 with examples. (8 Marks)
12. (a) Draw and explain the block diagram of 8051microcontroller. (10 Marks) (b) Explain in detail about PUSH and POP instruction using in 8051 assembly language programming. (4 Marks)
Module 2
13. (a) Mention about the Mode of timer operation in 8051 microcontrollers? What is the function of C/T bit in the TMOD register? (8 Marks) (b) Explain C data types for 8051 with their data size in bits and data range. (6 Marks)
14. (a) Write a program to generate a frequency of 100 kHZ on pin p2.3, use timer 1 in mode 1 , XTAL= 22MHz. (8 marks) (b) Write an assembly language program to find the square value of 2’s compliment of given number F1 h and show the result through port 1. (6 Marks)
Module 3
15. (a) Write a program to generate a square wave of 10 KHz at a port pin P1.5 by using Interrupt. (XTAL=22MHz). (8 Marks) (b) Explain the SCON register with its bit pattern and state asynchronous data communication and data framing. (6 Marks)
16. (a) Write a program for the 8051 to transfer the letter “A” serially at 4800 baud rate continuously. Use 8 bit data and 1 stop bit. (8 marks) (b) What are the steps required for the activation of interrupts? (6 Marks)
Module 4
17. With the diagram explain how 8051 Interfacing data and code memory.
18. Draw the interfacing diagram of a relay with microcontroller and explain its operation
with any industrial application.
INSTRUMENTATION AND CONTROL ENGINEERING
Module 5
19. Explain in detail and Draw the block diagram of AT Mega 32 microcontroller with a
neat sketch.
20. (a) Draw and explain the Harvard Architecture in the AVR. (9 Marks) (b) Write a short note on Timers in AT mega 32. (5 Marks)
Syllabus
MICROCONTROLLERS
Module 1 (9 Hours)
Intel 8051 Microcontroller – Overview-Architecture- Instruction set - Addressing modes
Evolution of microprocessors and microcontrollers- Overview of Intel 8051 family of microcontroller - Architecture of Intel 8051 - ALU, internal RAM and ROM, Oscillator and Reset Circuits, Stack and stack pointer - Special Function Registers of 8051 - Ports - Instruction set of 8051 - Data transfer instructions, Arithmetic, Logical, Compare and Rotate instructions, Bit processing instructions - Addressing modes of8051
Module 2 (10 Hours)
Microcontroller languages - ports - timers
Comparison of machine language, assembly language and high level languages - Assembler directives and C data types for 8051 - An introduction to programming 8051 in Assembly and C language programming of 8051 - Examples illustrating the use of basic types of instructions - Programming the ports of 8051 - Timers of 8051 - Modes of operations - Programming the timers in assembly language and C language
Module 3 (9 Hours)
Serial communication and Interrupts
Introduction to serial communication - Synchronous and asynchronous communication – RS 232 – MAX232 - Modes of operations - Serial communication programming in assembly language and C language - Introduction to interrupts in 8051 - Priority of interrupts - Interrupt handling and execution for timer - External and serial interrupts - Programming to handle all types of interrupts in assembly language and C language.
INSTRUMENTATION AND CONTROL ENGINEERING
Module 4 (9 Hours)
8051 Microcontroller Interfacing
Interfacing external memory to Intel 8051 - Examples of Interfacing data memory andcode Memory - Interfacing LCD to 8051 - Interfacing matrix keyboard Interfacing - ADC and DAC interfacing - Interfacing sensors - Interfacing relays, stepper motors and DC motors.
Module 5 (8 Hours)
AVR Microcontrollers and Arduino
Over view of AVR family - RISC and Harvard architecture of the AVR – salient features - The general purpose registers in the AVR - data memory – Instruction for data memory handling – AVR status register – Data RAM / ROM memory space allocation in AVR – AVR data format and directives - I/O ports – Counters and Timers – Interrupts – Serial ports - Atmega 32 microcontroller block diagram Arduino – Block diagram description of the system– Programming Arduino- Examples of practical solutions using Arduino
Text Books
1. Muhammed Ali Mazidi and Janice GillispieMazidi, “The 8051 MicrocontrollerandEmbedded Systems using Assembly and C”, Pearson Education,2/e.
2. Manish K. Patel, “The 8051 based embedded systems”, McGraw Hill Education(India),2014.
3. Muhammad Ali Mazidi, ZarmadNaimi, SepehrNaimi, “AVR Microcontroller andEmbedded Systems: Using Assembly and C”, Pearson Education Ltd 2014.
Reference Books
1. Kenneth J Ayala, “The 8051 Microcontroller”, Cengage Learning,3/e.
2. Ramani Kalpathi and Ganesh Raja, “Microcontrollers and Applications”, SanguineTechnical Publishers,2009.
3. Raj Kamal, “Microcontrollers Architecture, programming, interfacing and systemdesign”, Pearson,2/e.
4. J. M. Hughes, “Arduino: A Technical Reference: A Handbook for Technicians,Engineers, and Makers”, O'Reilly Media, Inc., 1/e.
INSTRUMENTATION AND CONTROL ENGINEERING
No Topic No. of Lectures 1 Intel 8051 Microcontroller- overview –Architecture- Instruction set -
Addressing modes (9 Hours)
1.1 Evolution of microprocessors and microcontrollers- Overview of Intel 8051 family of microcontroller - Architecture of Intel 8051.
2 Hours
1.2 ALU, internal RAM and ROM, Oscillator and Reset Circuits, Stack and stack pointer - Special Function Registers of 8051 – Ports.
2 Hours
1.3 Instruction set of 8051 - Data transfer instructions, Arithmetic and Logical instructions.
2 Hours
1.4 Rotate instructions, Bit processing instructions. 1 Hours 1.5 Addressing modes of8051. 2 Hours 2 Microcontroller languages - ports – timers (10 Hours)
2.1 Comparison of machine language, assembly language and high-level languages - Assembler directives and C data types for 8051.
1 Hour
2.2 An introduction to programming 8051 in Assembly and C language programming of 8051 - Examples illustrating the use of basic types of instructions.
4 Hours
2.3 Programming the ports of 8051 both in C and assembly 2 Hours 2.4 Timers of 8051 - Modes of operations - Programming the timers
in assembly language and C language. 3 Hour
3 Serial communication and Interrupts (9 Hours)
3.1 Introduction to serial communication - Synchronous and asynchronous communication – RS232 – MAX232.
2 Hours
3.2 Modes of operations - Serial communication programming in assembly language and C language.
3 Hours
3.3 Introduction to interrupts in 8051 - Priority of interrupts - Interrupt handling and execution for timer, external and serial interrupts.
3 Hours
3.4 Programming to handle all types of interrupts in assembly language and C language.
1 Hour
4 8051 Microcontroller Interfacing (9 Hours)
4.1 Interfacing external memory to Intel 8051 - Examples of Interfacing data memory andcode Memory.
3 Hours
4.2 Interfacing LCD to 8051 - Interfacing matrix keyboard Interfacing.
2 Hours
4.3 ADC and DAC interfacing - Interfacing sensors - Interfacing relays.
2 Hours
4.4 Stepper motors and DC motors interfacing. 2 Hours 5 AVR Microcontrollers and Arduino (8 Hours)
Course Contents and Lecture Schedule INSTRUMENTATION AND CONTROL ENGINEERING
5.1 Over view of AVR family - RISC and Harvard architecture of the AVR – salient features
2 Hours
5.2 The general purpose registers in the AVR – the AVR data memory – Instruction for handling data memory – AVR status register.
2 Hours
5.3 Data RAM / ROM memory space allocation in AVR – AVR data format and directives - I/O ports – Counters and Timers – Interrupts – Serial ports (No need for programming)-Atmega 32 microcontroller block diagram
2 Hours
5.4 Arduino – Block diagram description of the system– Programming Arduino- Examples of practical solutions using Arduino.
2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICT307 SIGNALS & SYSTEMS CATEGORY L T P CREDIT PCC 3 1 0 4
Preamble:
The concept of signals and systems arise in a wide variety of fields, and the ideas and techniques associated with these concepts play an important role in such diverse area of science and technology as communication, aeronautics and astronautics, circuit design, instrumentation and control engineering, seismology, biomedical engineering, energy generation and distribution systems, chemical process control and speech processing. The signals, which are functions of one or more independent variables, contain information about the behaviour or nature of some phenomenon, whereas the systems respond to particular signals by producing other signals or some desired behaviour. This course is designed to provide basic knowledge in properties of signals and systems, different mathematical tools to represent signals and systems and finding response of systems for different input signals.
Prerequisite:
Students are expected to have knowledge in solution of ordinary differential equations, Laplace Transforms and Fourier representations.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Solve problems from following topics: signal classification, representation, basic signal operations and properties of systems.
CO 2 Determine the response of continuous time LTI systems using convolution integral and differential equations and determine the response of discrete time LTI systems using convolution sum and difference equations
CO 3 Apply theory of Fourier representations to analyse the spectral characteristics of periodic and aperiodic signals.
CO 4 Apply the Laplace transform for the analysis of continuous-time systems.
CO 5 Apply the Z- transform for the analysis of discrete-time signals and systems.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 2 3 CO 2 3 2 3 CO 3 3 2 3
INSTRUMENTATION AND CONTROL ENGINEERING
CO 4 3 2 3 CO 5 3 2 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 10 10 20 Apply 40 40 80 Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Determine whether the signal 𝑥𝑥(𝑛𝑛) = 1 + sin 5𝜋𝜋𝑛𝑛3
+ 𝜋𝜋2 is periodic. If periodic, find
the fundamental period. (3 marks)
2. Let 𝑥𝑥(𝑡𝑡) = 𝑢𝑢(𝑡𝑡 + 0.5) − 𝑢𝑢(𝑡𝑡 − 0.5). Sketch 𝑦𝑦(𝑡𝑡) = 2𝑥𝑥(𝑡𝑡) + 𝑥𝑥(𝑡𝑡2). (3 marks)
3. (a) A system is described as 𝑑𝑑2
𝑑𝑑𝑡𝑡 2 𝑦𝑦(𝑡𝑡) + 2𝑦𝑦(𝑡𝑡) + 3𝑡𝑡𝑦𝑦(𝑡𝑡) = 𝑥𝑥(𝑡𝑡). Check whether the system is stable, causal, linear and Time invariant. (10 marks)
INSTRUMENTATION AND CONTROL ENGINEERING
(b) Define, sketch and list the properties of continuous time impulse function.
(4 marks)
Course Outcome 2 (CO2):
1. Evaluate the convolution 𝑦𝑦(𝑡𝑡) = 𝑥𝑥(𝑡𝑡) ∗ ℎ(𝑡𝑡) where 𝑥𝑥(𝑡𝑡) = 𝑒𝑒−𝑡𝑡𝑢𝑢(𝑡𝑡) and ℎ(𝑡𝑡) = cos 𝑡𝑡 (10 Marks)
2. Find the total response of a second order LTI system described the following differential equation
𝑑𝑑2𝑦𝑦(𝑡𝑡)𝑑𝑑𝑡𝑡2 +
𝑑𝑑𝑦𝑦(𝑡𝑡)𝑑𝑑𝑡𝑡
+ 2𝑦𝑦(𝑡𝑡) = 4𝑒𝑒−2𝑡𝑡 , 𝑡𝑡 ≥ 0
with 𝑦𝑦(0) = 3, 𝑦𝑦′(0) = 4 (14 Marks)
3. Find the convolution of the following signals 𝑥𝑥1[𝑛𝑛] = 2𝑛𝑛𝑢𝑢[−𝑛𝑛 − 1] 𝑎𝑎𝑛𝑛𝑑𝑑 𝑥𝑥2[𝑛𝑛] = 4𝑛𝑛𝑢𝑢[−𝑛𝑛 − 1]
(14 Marks) 4. If roots of and LTI system characteristic equation is real and distinct, what will be the
form of natural response? (3 Marks)
Course Outcome 3 (CO3):
1. Determine the Fourier transform of 𝑥𝑥(𝑡𝑡) = sin(Ω0𝑡𝑡). (3 marks)
2. Find the inverse Fourier Transform of 𝑋𝑋(𝐽𝐽Ω) = 𝛿𝛿(Ω − Ω0). (3 marks)
3. (a) Determine the exponential Fourier series representation of half wave rectified signal. (10 marks)
(b) If 𝑥𝑥(𝑡𝑡) = 𝑢𝑢(𝑡𝑡 − 3) − 𝑢𝑢(𝑡𝑡 − 5)𝑎𝑎𝑛𝑛𝑑𝑑 ℎ(𝑡𝑡) = 𝑒𝑒−3𝑡𝑡𝑢𝑢(𝑡𝑡).𝐹𝐹𝐹𝐹𝑛𝑛𝑑𝑑 𝑥𝑥(𝑡𝑡) ∗ 𝑢𝑢(𝑡𝑡).
(4 marks)
4. Compute the Fourier transform of the signal 𝑥𝑥[𝑛𝑛] = 𝛿𝛿(𝑛𝑛 − 𝑘𝑘). (3 marks) 5. Find the Fourier series representation of 𝑥𝑥[𝑛𝑛] = sin[3 2𝜋𝜋𝑛𝑛
5]. (3 marks)
6. (a) Determine the DTFT of the signal 𝑥𝑥[𝑛𝑛] = 𝑢𝑢[𝑛𝑛] − 𝑢𝑢[𝑛𝑛 − 𝑁𝑁]. (10 marks)
(b) State and prove Convolution theorem in Fourier transform domain. (4 marks)
INSTRUMENTATION AND CONTROL ENGINEERING
Course Outcome 4 (CO4):
1. Find the Inverse Laplace transform of 𝑋𝑋(𝑠𝑠) = 3𝑠𝑠2+8𝑠𝑠+6(𝑠𝑠+2)(𝑠𝑠2+2𝑠𝑠+1)
. (3 marks)
2. Find the Laplace transform of 𝑥𝑥(𝑡𝑡) = 𝑒𝑒−𝑎𝑎𝑡𝑡 𝑠𝑠𝐹𝐹𝑛𝑛𝑠𝑠𝑡𝑡. (3 marks)
3. (a) Find the Laplace transform and sketch the pole zero plot and ROC for the signal𝑥𝑥(𝑡𝑡) = 𝑒𝑒−3𝑡𝑡𝑢𝑢(𝑡𝑡) + 𝑒𝑒2𝑡𝑡𝑢𝑢(−𝑡𝑡). (10 marks)
(b) State and prove Initial Value Theorem. (4 marks)
Course Outcome 5 (CO5):
1. Find the Z transform and ROCof𝑥𝑥[𝑛𝑛] = 2𝑛𝑛𝑢𝑢[𝑛𝑛]. (3 marks)
2. State and prove Convolution property in Z transform. (3 marks)
3. (a) Find the inverse of 𝑋𝑋(𝑍𝑍) = 2𝑧𝑧3−5𝑧𝑧2+𝑧𝑧+3(𝑧𝑧−1)(𝑧𝑧−2)
. (10 marks)
(b) Prove that convolution in time domain is equivalent to multiplication in Z domain.
(4 marks)
Model Question paper
Course Code: ICT307
Course Name:SIGNALS AND SYSTEMS
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Determine the even and odd component of the unit step signal 𝑢𝑢(𝑡𝑡).2. Define energy and power signals.3. If roots of and LTI system characteristic equation is real and distinct, what will be the
form of natural response?4. Write down a difference equation for an arbitrary digital system with two storage
elements and a sinusoidal input.
5. Find the Fourier series representation of 𝑥𝑥[𝑛𝑛] = cos 𝜋𝜋3𝑛𝑛 + sin(𝜋𝜋
5𝑛𝑛).
6. Compute the Fourier Transform of 𝑥𝑥[𝑛𝑛] = 𝑎𝑎𝑛𝑛𝑢𝑢[𝑛𝑛].7. State and prove Final Value Theorem of Laplace Transform.8. Establish the relationship between Laplace Transform and Fourier Transform.
INSTRUMENTATION AND CONTROL ENGINEERING
9. Find the Z Transform and ROC of 𝛿𝛿[𝑛𝑛]. 10. Establish the correspondence between s-plane and z-plane.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. (a) If 𝑥𝑥1(𝑡𝑡) and 𝑥𝑥2(𝑡𝑡) are periodic signals with fundamental periods 𝑇𝑇1 and 𝑇𝑇2. Under what conditions 𝑥𝑥(𝑡𝑡) = 𝑥𝑥1(𝑡𝑡) + 𝑥𝑥2(𝑡𝑡) is periodic. What is the fundamental period of 𝑥𝑥(𝑡𝑡). (6 marks) (b) For the signal shown below plot the following. (8 marks)
(i) 𝑥𝑥(2𝑡𝑡)
(ii) 𝑥𝑥 𝑡𝑡2
12. (a) Check whether the signal 𝑥𝑥(𝑡𝑡) = 𝑟𝑟(𝑡𝑡) − 𝑟𝑟(𝑡𝑡 − 2) is energy signal, power signal, neither energy nor power signal. (𝑟𝑟(𝑡𝑡) is a ramp signal). (4 marks)
(b) Check whether the system 𝑑𝑑𝑦𝑦 (𝑡𝑡)𝑑𝑑𝑡𝑡
+ 2𝑦𝑦(𝑡𝑡) = 𝑥𝑥(𝑡𝑡) 𝑑𝑑𝑥𝑥 (𝑡𝑡)𝑑𝑑𝑡𝑡
is Linear or not. (10 marks)
Module 2
13. Find the total response of a second order LTI system described the following differential equation
𝑑𝑑2𝑦𝑦(𝑡𝑡)𝑑𝑑𝑡𝑡2 +
𝑑𝑑𝑦𝑦(𝑡𝑡)𝑑𝑑𝑡𝑡
+ 2𝑦𝑦(𝑡𝑡) = 4𝑒𝑒−2𝑡𝑡 , 𝑡𝑡 ≥ 0
with 𝑦𝑦(0) = 3, 𝑦𝑦′(0) = 4 (14 Marks)
14. Find the convolution of the following signals 𝑥𝑥1[𝑛𝑛] = 2𝑛𝑛𝑢𝑢[−𝑛𝑛 − 1] 𝑎𝑎𝑛𝑛𝑑𝑑 𝑥𝑥2[𝑛𝑛] = 4𝑛𝑛𝑢𝑢[−𝑛𝑛 − 1]
(14 Marks)
Module 3
15. (a) Find the inverse Fourier Transform of 𝑋𝑋𝑒𝑒𝑗𝑗𝑗𝑗 = 1 + 2𝑒𝑒−𝑗𝑗𝑗𝑗 + 2𝑒𝑒−𝑗𝑗2𝑗𝑗+3𝑒𝑒−𝑗𝑗3𝑗𝑗 where 𝑋𝑋𝑒𝑒𝑗𝑗𝑗𝑗 𝐹𝐹𝑠𝑠 𝐷𝐷𝑇𝑇𝐹𝐹𝑇𝑇 𝑜𝑜𝑜𝑜 𝑥𝑥(𝑛𝑛). (5 marks) (b) Find the DTFS representation for 𝑥𝑥(𝑛𝑛) = 5 + sin(𝜋𝜋𝑛𝑛
2)+cos(𝜋𝜋𝑛𝑛
2). (9 marks)
16. (a) Find the Fourier transform of 𝑥𝑥(𝑛𝑛) = sin(𝜋𝜋𝑛𝑛2
)𝑢𝑢(𝑛𝑛). (6 marks)
INSTRUMENTATION AND CONTROL ENGINEERING
(b) Determine the DTFS coefficients for the discrete time signal 𝑥𝑥[𝑛𝑛] = cos 2𝜋𝜋𝑛𝑛3 +
sin(2𝜋𝜋𝑛𝑛7
). Also plot the magnitude and phase spectra. (8 marks)
Module 4
17. (a) Use the convolution theorem of Laplace Transform to find 𝑦𝑦(𝑡𝑡) = 𝑥𝑥1(𝑡𝑡) ∗
𝑥𝑥2(𝑡𝑡),𝑠𝑠ℎ𝑒𝑒𝑟𝑟𝑒𝑒 𝑥𝑥1(𝑡𝑡) = 𝑒𝑒−3𝑡𝑡𝑢𝑢(𝑡𝑡)𝑎𝑎𝑛𝑛𝑑𝑑 𝑥𝑥2(𝑡𝑡) = 𝑢𝑢(𝑡𝑡 − 2). (10 marks)
(b) Find the Laplace transform and ROC of 𝑒𝑒−𝑎𝑎|𝑡𝑡|, a>0. (4 marks)
18. (a) Find the inverse Laplace Transform of 2𝑆𝑆+1(𝑆𝑆+1)(𝑆𝑆2+2𝑆𝑆+2)
. (10 marks)
(b) List the properties of ROC of Laplace Transform. (4 marks)
Module 5
19. (a) Determine the Z transform of 𝑥𝑥(𝑛𝑛) = 𝑎𝑎𝑛𝑛𝑢𝑢(𝑛𝑛) − 𝑏𝑏𝑛𝑛𝑢𝑢(−𝑛𝑛 − 1) and find ROC.
(10 marks)
(b) Find the Z transform and ROC of 𝛿𝛿(𝑛𝑛). (4 marks)
20. (a) Find the inverse Z transform of the signal 𝑋𝑋(𝑍𝑍) = 1+2𝑧𝑧−1
1−2𝑧𝑧−1+𝑧𝑧−2. (10 marks) (b) State and prove Time shift property of Z transform. (4 marks)
Syllabus
SIGNALS AND SYSTEMS
Module 1 (8 Hours)
SIGNALS AND SYSTEM - REPRESENTATION AND CLASSIFICATION
Signal classification and representation - Random/ deterministic, Continuous/ Discrete,
Digital/ Analog, Power/Energy, Even/Odd, Periodic/ Aperiodic signals, operations on
dependent and independent axis, Special signals (impulse function, unit step function, unit
sample function).
System Representation and Classification - Linear/Non-Linear, Dynamic/Static, Causal/Non-causal, Shift (time) invariant/ Shift (time) variant classifications for continuous and discrete systems. Stability of Systems.
Module 2 (10 Hours)
TIME-DOMAIN REPRESENTATION OF LTI SYSTEMS
INSTRUMENTATION AND CONTROL ENGINEERING
Convolution Sum and Integral
Linear Time Invariant Systems - Impulse response of continuous LTI system, Unit sample response of discrete LTI Systems, Convolution integral and its properties, convolution sum and its properties. Stability of LTI systems.
Differential and Difference equation representation of LTI systems
Solving differential and difference equations – Characteristics of systems described by differential and difference equations
Module 3 (10 Hours)
FOURIER REPRESENTATIONS
Fourier Representation of Continuous Time Signals
Frequency domain Representation of Signals - Fourier series representation of continuous periodic signals, Fourier Transform representation of continuous signals, Properties of Fourier transform.
Fourier Representation of Discrete Time Signals
Fourier series representation of Discrete time periodic signals, Properties, Discrete Time Fourier Transform (DTFT) representation of discrete signals, Properties of DTFT. Parseval’s Theorem and Convolution Theorem in Fourier Transform domain and DTFT domain.
Module 4 (8 Hours)
LAPLACE TRANSFORM
Laplace transform definition (unilateral and bilateral), Region of Convergence, properties and Theorems, Laplace transform representation of signals and systems, Inverse Laplace Transform, Laplace Transform analysis of LTI systems.
Module 5 (9 Hours)
Z TRANSFORM
Z Transform, Mapping of s plane to Z plane, Region of Convergence, Properties of z-transform, Inverse z-transform. Difference Equations- Analysis of discrete linear time invariant systems using z-transform. Unilateral Z Transform, Properties, Initial and Final value Theorems.
INSTRUMENTATION AND CONTROL ENGINEERING
Text Books
1. Simon Haykins and Barry Van Veen, “Signals and Systems”, John Wiley & Sons,2001 Reprint 2002.
2. Alan V Oppenheim, Alan S, Willsky and A Hamid Nawab, “Signals and Systems”,Pearson Education Asia / PHI, 2nd edition, 1997. Indian Reprint 2002.
Reference Books
1. B. P. Lathi, “Linear Systems and Signals”, Oxford University Press, 2005.
2. H. P Hsu, R. Ranjan, “Signals and Systems”, Scham’s outlines, TMH, 2006.
3. Fred J. Taylor, “Principles of Signals and Systems”, McGraw-Hill Education.
Course Contents and Lecture Schedule No Topic No. of Lectures
1 MODULE I: SIGNALS AND SYSTEM - REPRESENTATION AND
CLASSIFICATION (8 Hours)
1.1 Signal classification and representation - Random/ deterministic,
Continuous/ Discrete, Digital/ Analog, Power/Energy,
Even/Odd, Periodic/ Aperiodic signals, operations on dependent
and independent axis, Special signals (impulse function, unit
step function, unit sample function)
5 Hours
1.2 System Representation and Classification - Linear/Non-Linear,
Dynamic/Static, Causal/Non-causal, Shift (time) invariant/ Shift
(time) variant classifications for continuous and discrete
systems. Stability of Systems
3 Hours
2 MODULE II: TIME-DOMAIN REPRESENTATION OF LTI SYSTEMS
(10 Hours)
2.1 Convolution Sum and Integral:
Linear Time Invariant Systems - Impulse response of continuous
LTI system, Unit sample response of discrete LTI Systems,
Convolution integral and its properties, convolution sum and its
properties. Stability of LTI systems.
5 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
2.2 Differential and Difference equation representation of LTI
systems
Solving differential and difference equations – Characteristics of
systems described by differential and difference equations
5 Hours
3 MODULE III: FOURIER REPRESENTATIONS:(10 Hours)
3.1 Fourier Representation of Continuous Time Signals
Frequency domain Representation of Signals - Fourier series
representation of continuous periodic signals, Fourier Transform
representation of continuous signals, Properties of Fourier
transform.
5 Hours
3.2 Fourier Representation of Discrete Time Signals
Fourier series representation of Discrete time periodic signals,
Properties, Discrete Time Fourier Transform (DTFT)
representation of discrete signals, Properties of DTFT.
Parseval’s Theorem and Convolution Theorem in Fourier
Transform domain and DTFT domain.
5 Hours
4 MODULE IV: LAPLACE TRANSFORM: (8 Hours)
4.1 Laplace transform definition (unilateral and bilateral), Region of
Convergence, properties and Theorems, Laplace transform
representation of signals and systems,
4 Hours
4.2 Inverse Laplace Transform, Laplace Transform analysis of LTI
systems.
4 Hours
5 MODULE V: Z TRANSFORM (9 Hours)
5.1 Z Transform, Mapping of s plane to Z plane, Region of
Convergence, Properties of z-transform, Inverse z-transform.
3 Hours
5.2 Difference Equations- Analysis of discrete linear time invariant
systems using z-transform.
3 Hours
5.3 Unilateral Z Transform, Properties, Initial and Final value
Theorems.
3 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICL331 SYSTEM SIMULATION LAB CATEGORY L T P CREDIT PCC 0 0 3 2
Preamble:
The aim of System Simulation Lab course is to offer students the fundaments of technical computational and simulation software, and application of these software in Control Engineering field. This lab also aims to encourage the students to use FOSS (Free and Open Source Software) like Sci Lab.
Prerequisite:
Basics of programming, ICT206 Control Engineering I, and ICT303 Control Engineering II.
Course Outcomes:After the completion of the course the student will be able to
CO 1 Use FOSS (Free and Open Source Software)like Sci lab to solve the mathematical and computational problems.
CO 2 Do the time-domain, frequency-domain, and stability analysis of a system.
CO 3 Design control systems to meet the desired specifications.
CO 4 Make use of simulation software to analyse the given systems.
CO 5 Demonstrate skills in technical communication and teamwork.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10
PO 11
PO 12
CO 1 3 3 3 CO 2 3 3 3 3 2 CO 3 3 3 3 3 3 3 CO 4 3 3 3 2 3 3 CO 5 3
Assessment Pattern
Mark distribution
Total Marks CIE ESE ESE Duration
150 75 75 2.5 hours
INSTRUMENTATION AND CONTROL ENGINEERING
Attendance : 15 marks Continuous Assessment : 30 marks Internal Test (Immediately before the second series test) : 30 marks
End Semester Examination Pattern:The following guidelines should be followed regarding award of marks (a) Preliminary work :15Marks (b) Implementing the work/Conducting the experiment :10 Marks (c) Performance, result and inference (usage of equipments and trouble shooting) : 25 Marks (d) Viva voce :20 marks (e) Record :5 Marks
General instructions: Practical examination to be conducted immediately after the second series test covering entire syllabus given below. Evaluation is a serious process that is to be conducted under the equal responsibility of both the internal and external examiners. The number of candidates evaluated per day should not exceed 20. Students shall be allowed for the University examination only on submitting the duly certified record. The external examiner shall endorse the record.
LIST OF EXPERIMENTS
(Minimum of 12 experiments mandatory)
Part A(All experiments are mandatory):
1. Familiarization ofSci Lab or equivalent FOSS.a) Basic commands.b) Generation of signals.
2. Time domain analysis of Control systems.a) Transfer function from zeros and poles.b) Zeros and poles from transfer function.c) Analysis of first order system.d) Analysis of second order system.e) Analysis of higher order system.f) Analysis of open-loop and closed loop system.g) Effect of addition of poles and zeros to a system.h) Transfer function of DC motor.
3. Frequency domain analysis of control systems using bode plot.a) Bode plot of first order system, second order system, and
higher order system.b) Gain margin and phase margin.c) Effect of addition of poles and zeros in bode plot.
4. Stability analysis of control systems.a) Root locus of a system.b) Nyquist stability analysis.
5. State-space representation and analysis of a system.
Continuous Internal Evaluation Pattern: INSTRUMENTATION AND CONTROL ENGINEERING
a) Transfer function from state model.b) State model from transfer function.c) State model from zeros and poles.d) Zeros and poles from state model.e) Analysis of a state model.
6. Design of lead compensator, lag compensator,and lead-lag compensator usingroot-locus method.
7. Design of lag compensator, lead compensator, and lag-lead compensator usingbode plot method.
8. Familiarisation of Virtual Instrumentation software used (E.g.: - LabVIEW)a) Loops and charts.b) Case and sequence structures.
Part B (Minimum four experiments are mandatory)
1. Design of state-variable feedback and state observer.2. Study of first and second order performance with and without initial conditions
using XCos.3. Study of phase trajectories of stable focus, stable node, vortex, and limit cycles
using XCos.4. Simulation of armature-controlled dc motor using XCos.5. Real time control using XCos.6. Hardware Realisation of Closed-loop System using Ardeino and Scilab.
Text Books
1. I. J. Nagrath and M. Gopal, “Control Systems Engineering”, New Age InternationalPrivate Limited.
2. Katsuhiko Ogata, “Modern Control Engineering”, Pearson, 5/e.
3. Jovitha Jerome, “Virtual Instrumentation using LabVIEW”, PHI Learning Pvt. Ltd,New Delhi.
Reference Books
4. Farid Golnaraghi and Benjamin C. Kuo, “Automatic Control Systems”, McGraw-HillEducation, 10/e.
5. A. Anand Kumar, “Control Systems”, PHI Learning, 2/e.
6. D. Roy Choudhury, “Modern Control Engineering”, Prentice Hall India LearningPrivate Limited.
7. K. Alice Mary and P. Ramana, “Control Systems”, The Orient Blackswan.8. Robert H. Bishop, “Learning with Lab-view”, Pearson, 2015.9. S.Sumathi&P.Surekha, “LabVIEW based Advanced Instrumentation”, Springer,2007
INSTRUMENTATION AND CONTROL ENGINEERING
ICL333 MICROCONTROLLERS LAB CATEGORY L T P CREDIT PCC 0 0 3 2
Preamble:
Course provideshands on training in8051 Microcontroller and Arduino based system design, both in programming and interfacing.It makes the students capable of providing technical solutions to engineering problems using microcontrollers. The course will make the students more creative as it gives an opportunity for them to design systems with new technology, sensors and interfacing devices.
Prerequisite:
ICT305 Microcontrollers.
Course Outcomes:After the completion of the course the student will be able to
CO 1 Do 8051 microcontrollers programming in assembly language. CO 2 Do 8051 microcontrollersprogramming in C language. CO 3 Interface Microcontroller with peripheral devices and I/O operations CO 4 Design programming in the Arduino board and implement microcontroller-based
real-life projects. CO 5 Demonstrate skills in technical communication and team work.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10
PO 11
PO 12
CO 1 3 2 CO 2 3 2 CO 3 3 3 3 3 2 CO 4 3 3 3 2 3 3 3 CO 5 3
Assessment Pattern
Mark distribution
Total Marks CIE ESE ESE Duration
150 75 75 2.5 hours
Continuous Internal Evaluation Pattern:
Attendance : 15 marks
INSTRUMENTATION AND CONTROL ENGINEERING
Continuous Assessment : 30 marks Internal Test (Immediately before the second series test) : 30 marks End Semester Examination Pattern:The following guidelines should be followed regarding award of marks (a) Preliminary work : 15Marks (b) Implementing the work/Conducting the experiment : 10 Marks (c) Performance, result and inference (usage of equipments and trouble shooting) : 25 Marks (d) Viva voce : 20 marks (e) Record : 5 Marks General instructions: Practical examination to be conducted immediately after the second series test covering entire syllabus given below. Evaluation is a serious process that is to be conducted under the equal responsibility of both the internal and external examiners. The number of candidates evaluated per day should not exceed 20. Students shall be allowed for the University examination only on submitting the duly certified record. The external examiner shall endorse the record.
LIST OF EXPERIMENTS
(Minimum of 12 experiments mandatory –At least two experiments from each of the subheading and a simple project)
A) Assembly Language programming of 8051 Family in Keil/Rideenvironment: 1. Examples of arithmeticoperations 2. Examples of logicaloperation 3. Examples using simulated ports, timersetc 4. Examples of serialcommunication.
B) C language programming of 8051 Family in Keil/Rideenvironment
1. Examples of arithmetic and logicaloperations 2. Examples using simulated ports, timersetc 3. Examples of serialcommunication.
C) Using microcontroller kits: 1. InterfacingLED 2. Interfacing LCDdisplays 3. Keypad scanning 4. Interfacingbuzzers 5. Interfacing ADC andDAC 6. Interfacing steppermotor
D) Using Arduino Board.: 1. Interfacing LEDs, switches and various sensors 2. Design systems to control physical actuation devices like hydraulic piston,
Motors etc.
INSTRUMENTATION AND CONTROL ENGINEERING
E) A microcontroller-basedproject All students have to undertake a microcontroller-based project. The project may be done as a group task (group size not more than three). The developed system along with a project report is to be submitted at the end of thesession.
Text Books
1. Muhammed Ali Mazidi and Janice Gillispie Mazidi, “The 8051 Microcontrollerand Embedded Systems using Assembly and C”, Pearson Education,2/e.
2. Muhammad Ali Mazidi, Zarmad Naimi, Sepehr Naimi, “AVR Microcontroller and Embedded Systems: Using Assembly and C”, Pearson Education Ltd 2014.
INSTRUMENTATION AND CONTROL ENGINEERING
SEMESTER V MINOR
INSTRUMENTATION AND CONTROL ENGINEERING
ICT381 PROCESS AUTOMATION CATEGORY L T P CREDIT VAC 3 1 0 4
Preamble:
The aim of the Process Automation course is to provide the students with the basic knowledge of applications of computers in process control, fundamentals of PLC architecture, programming and addressing, Integration of DCS and PLC with computers and the basics of DCS programming.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Discuss the computer control of industrial process.
CO 2 Explain the architecture, input output configurations and registers of PLC.
CO 3 Build PLC ladder diagram for a process application through the proper addressing.
CO 4 Explain the DCS architecture and interfacing.
CO 5 Discuss the DCS integration with PLC and computers.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 2 3 CO 2 2 3 CO 3 3 3 3 3 3 CO 4 2 3 CO 5 2 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 15 15 30 Apply 35 35 70 Analyse Evaluate Create Mark distribution
Total Marks CIE ESE ESE Duration
INSTRUMENTATION AND CONTROL ENGINEERING
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Explain the applications of computers in process control.
2. Explain the functions of a PLC.
Course Outcome 2 (CO2):
1. Describe the architecture of the PLC.
2. Perform the input output configurations of the PLC.
Course Outcome 3 (CO3):
1. Perform the memory addressing of the PLC.
2. Perform the selection of PLC, according to the process applications.
Course Outcome 4 (CO4):
1. Describe the architecture of DCS.
2. Explain the different modules of DCS.
3. Explain the different DCS configurations and functions.
Course Outcome 5 (CO5):
1. Describe the computer integration with DCS and PLC.
2. Explain the different network linkages.
INSTRUMENTATION AND CONTROL ENGINEERING
Model Question paper
Course Code: ICT 381
Course Name: PROCESS AUTOMATION
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Differentiate DDC and SCADA.2. Write short note on advantages of PLC.3. Compare any two bit level instructions in the PLC.4. How input connections are made in PLC with isolation?5. Explain the complete scan cycle of the PLC.6. Write short note on memory organization of PLC.7. Explain computer interface with DCS.8. Write short note on DCS flow sheet symbols.9. Write short note on profi bus.10. Write short note on man-machine interface.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. Explain hardware and software architecture of SCADA.12. Explain DDC and SCADA with the help of neat block diagrams.
Module 2
13. With the help of a block diagram, explain the architecture of the PLC.14. (a) Explain about automation hierarchy. (7)
(b) What is Program scan? Explain. (7)
Module 3
15. Draw the ladder rungs to represent:(i) Two switches are normally open and both have to be closed for a motor to
operate.(ii) Either of two, normally open, switches has to be closed for a coil to be
energised and operate an actuator.
INSTRUMENTATION AND CONTROL ENGINEERING
(iii) A motor is switched on by pressing a spring-return push button start switch,and the motor remains on until another spring-return push button stop switchis pressed.
(iv) A lamp is to be switched on if there is an input from sensor A or sensor B.(v) A light is to come on if there is no input to a sensor.(vi) A solenoid valve is to be activated if sensor A gives an input
16. Explain the function of timers and counters in the PLC.
Module 4
17. With the help of block diagram, explain the architecture of DCS
18. Write a short note on:
a. Scalability.
b. Redundancy.
c. Trending.
d. Detail display.
Module 5
19. (a) How man machine interface is possible in DCS? Explain. (7)
(b) What are the peripheral devices used with DCS? Explain. (7)
20. How external input connections are made with DCS and how output connections aretaken from DCS? Explain.
Syllabus
PROCESS AUTOMATION
Module 1 (9 Hours)
Introduction to PLC
Review of computers in process control: Data loggers, Data Acquisition Systems (DAS), Direct Digital Control (DDC). Supervisory Control and Data Acquisition Systems (SCADA), sampling considerations. Functional block diagram of computer control systems.
Programmable logic controller: PLC versus relay, characteristic functions of a PLC, PLC versus PC, evolution of PLC, definition, functions of PLC, advantages.
Module 2 (9 Hours)
Architecture of PLC
INSTRUMENTATION AND CONTROL ENGINEERING
The architecture of PLC, input output configuration, direct I/O, Parallel I/O, serial I/O, sliece I/O, register basics, timer functions, counter functions.
Module 3 (10 Hours)
PLC Programming
Memory and addressing – memory organization (system memory and application memory), I/O addressing, complete scan cycle, program execution, system installation and recommendations.
Case study: PLC selection and configuration for any one process applications.
Module 4 (9 Hours)
Distributed Control System (DCS)
Introduction to DCS, evolution of DCS, DCS flow sheet symbols, architecture of DCS.
Controller, input and output modules, communication module, data highway, local I/O bus, workstations, specifications of DCS.
Supervisory computer tasks and DCS configuration: supervisory computer functions, control techniques, supervisory control algorithms, DCS & supervisory computer displays, advanced control strategies.
Module 5 (8 Hours)
DCS system integration with PLC and computers
Man-machine interface, integration with PLC, integration with computers, integration with direct I/O, serial linkages, network linkages.
Text Books
1. B.G.Liptak, “Instrument Engineer’s Handbook – Process Control”, Butterworth-Heinemann Ltd, 3/e.
2. Samel M. Herb, “Understanding Distributed Processor Systems for Control”, ISA Publication.
Reference Books
1. B.G.Liptak, “Process Software and Digital Networks”, CRC Press, 4/e.
INSTRUMENTATION AND CONTROL ENGINEERING
2. John R. Hackworth & Frederick D. Hackworth Jr, “Programmable Logic Controllers– Programming Methods and Applications”, Pearson Education, 1/e.
3. John W.Webb & Ronald A. Reiss, “Programmable Logic Controllers – Principles andApplications”, PHI.
4. M. Chidambaram, “Computer Control of Processes”, Narosa Publishing.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Introduction to PLC (9 Hours)
1.1 Review of computers in process control, Data loggers, Data Acquisition Systems (DAS), Direct Digital Control (DDC).
2 Hours
1.2 Supervisory Control and Data Acquisition Systems (SCADA), sampling considerations. Functional block diagram of computer control systems.
2 Hours
1.3 Programmable logic controller: PLC versus relay, characteristic functions of a PLC.
2 Hours
1.4 PLC versus PC, evolution of PLC, definition. 2 Hours 1.5 Functions of PLC, advantages. 1 Hour 2 Architecture of PLC (9 Hours)
2.1 Architecture of PLC, input output configuration. 2 Hours 2.2 Direct I/O, Parallel I/O, serial I/O, sliece I/O. 2 Hours 2.3 Discrete and analog input and output module. 2 Hours 2.4 Local and remote I/O expansion. 1 Hour 2.5 Register basics, timer functions, counter functions. 2 Hours 3 PLC Programming (10 Hours)
3.1 Memory and addressing – memory organization (system memory and application memory).
2 Hours
3.2 I/O addressing, complete scan cycle. 1 Hour 3.3 Programming. 4 Hours 3.4 Program execution, system installation and recommendations. 2 Hours 3.5 Case study: PLC selection and configuration for any one process
applications. 1 Hour
4 Distributed Control Systems (9 Hours)
4.1 Introduction to DCS, evolution of DCS. 1 Hour 4.2 DCS flow sheet symbols, architecture of DCS. 2 Hours 4.3 Controller, input and output modules, communication module. 1 Hour 4.4 Data highway, local I/O bus, workstations, specifications of
DCS. 1 Hour
INSTRUMENTATION AND CONTROL ENGINEERING
4.5 Supervisory computer tasks and DCS configuration: supervisory computer functions, control techniques.
2 Hours
4.6 Supervisory control algorithms, DCS & supervisory computer displays, advanced control strategies.
2 Hours
5 DCS system integration with PLC and computers (8 Hours) 5.1 Man-machine interface. 2 Hours 5.2 Integration with PLC, integration with computers. 2 Hours 5.3 Integration with direct I/O, serial linkages. 2 Hours 5.4 Network linkages. 2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICT383 DATA ACQUISITION AND SIGNAL CONDITIONING FOR INSTRUMENTATION
CATEGORY L T P CREDIT VAC 3 1 0 4
Preamble:
The aim of the Data Acquisition and Signal Conditioning for Instrumentation course is to make the students to obtain the knowledge of different signal conditioning circuits used for instrumentation system and discussion about data acquisition basics.
Prerequisite:
Course on basic electronics, electrical, instrumentation, op amps is required.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Explain the fundamentals of data acquisition like ADC and sampling.
CO 2 Explain the fundamentals of signal conditioning like amplifier, filters, isolation and introduction to sensor-based instruments.
CO 3 Design the signal conditioning for resistive sensor.
CO 4 Design the signal conditioning for reactance variation sensor.
CO 5 Design the signal conditioning for self-generating sensor.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 2 3 CO 2 2 3 CO 3 3 3 3 CO 4 3 3 3 CO 5 3 3 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember 10 10 20 Understand 20 20 40 Apply 20 20 40 Analyse Evaluate Create
INSTRUMENTATION AND CONTROL ENGINEERING
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Write a note different ADC technique.
2. Explain the importance of multiplexing in data acquisition system.
Course Outcome 2 (CO2):
1. Write a note on isolation amplifier.
2. Explain dynamic and static characteristics of sensor.
Course Outcome 3 (CO3):
1. A 350 W strain gage having G= 2:1 is attached to an aluminium strut (E =73 GPa). The outside diameter of the strut is 50 mm and the inside diameter is 47.5 mm. Calculate the change in resistance when the strut supports a 1000 kg load.
2. A copper relay coil has 5000 Ohm at 25 0C and pulls in at 1 mA. The relay should operate at a constant voltage from 0 0C to 60 0C. In order to compensate for the copper coil temperature coefficient, we add an NTC thermistor shunted by a fixed resistor R. If the copper coil has TCR= 0.0039/K at 0 0C, and the NTC thermistor has 5700 Ohm at 0 0C and 810 Ohm at 50 0C, determine R.
Course Outcome 4 (CO4):
1. Explain the working of moving coil linear velocity sensor.
INSTRUMENTATION AND CONTROL ENGINEERING
2. A capacitive pressure sensor gives a 1 kHz output signal that must be amplified by1000 to obtain an acceptable signal level. The op amp available has a maximal inputoffset voltage of 3 mV at the working temperature. To prevent it from reducing thedynamic output range, the amplifier in Figure below is suggested. Give values for thecomponents of the circuit.
Course Outcome 5 (CO5):
1. Given piezoelectric sensor has a 100 pF capacitance and a charge sensitivity of 4microC/cm. The connecting cable has a 300 pF capacitance, and the measuringoscilloscope has an input impedance of 1 MW in parallel with 50 pF. Determine thevoltage sensitivity (V/cm) for the sensor considered alone.
2. A quartz crystal piezoelectric sensor of 1 cm2 area and 1 mm thickness between twoparallel metallic electrodes to measure variable forces perpendicular to the electrodes.Young's modulus for the quartz is 90 GPa, charge sensitivity is 2 pC/N, relativepermittivity is 5, and a cubic block with 1 cm sides has a resistance of 100 TOhmbetween opposite sides. A 100 MOhm resistance and a 20 pF capacitor shunt theelectrodes. If a force F = 0.01 sin(103t) N is applied, calculate the resulting peak-to-peak voltage between electrodes and the maximal deformation for the material.
Model Question paper
Course Code: ICT383
Course Name:DATA ACQUISITION AND SIGNAL CONDITIONING FOR INSTRUMENTATION
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Explain PC based data acquisition system.2. Write a note on Nyquist sampling theorem.3. Explain Programmable-Gain Instrumentation Amplifiers.
INSTRUMENTATION AND CONTROL ENGINEERING
4. Explain the importance of linearization in instrumentation system. 5. A 350 W strain gage having G= 2:1 is attached to an aluminium strut (E =73 GPa).
The outside diameter of the strut is 50 mm and the inside diameter is 47.5 mm. Calculate the change in resistance when the strut supports a 1000 kg load.
6. A P20 NTC thermistor (Thermometrics) has 10 kOhm, thermistor dissipation constant= 0.14 mW/K in still air at 25 0C, and R25/R125 = 19:8. Calculate the maximal drop in voltage across it when immersed in air at 35 0C.
7. Write a note on variable capacitive sensor. 8. Explain the working of moving coil linear velocity sensor. 9. Given piezoelectric sensor has a 100 pF capacitance and a charge sensitivity of 4
microC/cm. The connecting cable has a 300-pF capacitance, and the measuring oscilloscope has an input impedance of 1 MW in parallel with 50 pF. Determine the voltage sensitivity (V/cm) for the sensor considered alone.
10. Write a note on pyroelectric sensor.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. (a) Differentiate digital and analog filtering techniques. (7 marks) (b) Explain the working of Successive-Approximation ADCs. (7 marks)
12. (a) Discuss Aliasing problem during analog to digital conversion. (7 marks) (b) Explain the benefits of ADC Output Averaging. (7 marks)
Module 2
13. (a) Explain the working of Switched-Capacitance Filters. (7 marks) (b) Explain Digital Method of Isolation. (7 marks)
14. (a) Write a note on Software Linearization and Hardware Linearization. (7 marks) (b) Explain Passive vs. Active Filters. (7 marks)
Module 3
15. (a) A given PRT probe has 100 Ohm and temperature coefficient of resistance = 0.00389 at 0 0C. Calculate its sensitivity and temperature coefficient at 25 0C and 50 0C. (7 marks) (b) Explain the working of light dependent resistor. (7 marks)
16. (a) Explain the working of resistive hygrometer. (7 marks) (b) A copper relay coil has 5000 Ohm at 25 0C and pulls in at 1 mA. The relayshould operate at a constant voltage from 0 0C to 600C. In order tocompensate for the copper coil temperature coefficient, we add an NTCthermistor shunted by a fixed resistor R. If the copper coil has TCR= 0.0039/K at 00C, and the NTC thermistor has 5700 Ohm at 0 0C and810 Ohm at 50 0C, determine R. (7 marks)
Module 4
INSTRUMENTATION AND CONTROL ENGINEERING
17. (a) Explain the working of variable reluctance sensor. (7 marks)
(b) Explain the fundamentals and Structure of Carrier Amplifiers. (7 marks)
18. (a) Explain the working of digital hall sensor. (7 marks)
(b) A capacitive pressure sensor gives a 1 kHz output signal that must be amplified by
1000 to obtain an acceptable signal level. The op amp available has a maximal input
offset voltage of 3 mV at the working temperature. To prevent it from reducing the
dynamic output range, the amplifier in Figure below is suggested. Give values for the
components of the circuit. (7 marks)
Module 5
19. (a) Write a note on electro chemical sensors. (7 marks)
(b) Explain the working of pyroelectric sensor. (7 marks)
20. A quartz crystal piezoelectric sensor of 1 cm2 area and 1 mm thickness between twoparallel metallic electrodes to measure variable forces perpendicular to the electrodes.Young's modulus for the quartz is 90 GPa, charge sensitivity is 2 pC/N, relativepermittivity is 5, and a cubic block with 1 cm sides has a resistance of 100 TOhmbetween opposite sides. A 100 MOhm resistance and a 20-pF capacitor shunt theelectrodes. If a force F = 0.01 sin(103t) N is applied, calculate the resulting peak-to-peak voltage between electrodes and the maximal deformation for the material.
Syllabus
DATA ACQUISITION AND SIGNAL CONDITIONING FOR INSTRUMENTATION
Module 1 (9 Hours)
Introduction to Data Acquisition and Signal Conditioning. Analog to Digital Conversion-ADC Types-Accuracy and Resolution-ADC Noise Histograms-ENOB: Effective Number of Bits-ADC Output Averaging Benefits. Multiplexing and Sampling Theory- The Economy of Multiplexing-Fundamental Concepts.
INSTRUMENTATION AND CONTROL ENGINEERING
Module 2 (10 Hours)
Fundamentals of signal conditioning – Amplification - Instrumentation Amplifiers – Filtering – Attenuation – Isolation - Linearization – Circuit protection. Introduction to sensor based instruments – General concept – sensor classification – General input output configuration – static characteristics of measurement system – Dynamic characteristics – other sensor characteristics.
Module 3 (9 Hours)
Resistive sensors – Potentiometer – strain gauges – RTD – Thermistor – Magneto resistor – LDR – resistive hygrometer – resistive gas sensor – liquid conductivity sensor – Signal conditioning for resistive sensor – measurement of resistance – voltage divider – Wheatstone bridge measurements – deflection and balance type – Differential and instrumentation amplifier – interference.
Module 4 (9 Hours)
Reactance variation and electromagnetic sensors – capacitive sensor – inductive sensor – electromagnetic sensor - Signal conditioning for reactance variation sensors – problems and alternatives –AC bridge – carrier amplifier and coherent detection – specific signal conditioners for capacitive sensor – resolver to digital and digital to resolver converters.
Module 5 (8 Hours)
Self-generating sensors – thermoelectric sensors –piezoelectric sensors – pyroelectric sensors – photovoltaic sensors – electrochemical sensors - Signal conditioning forSelf-generating sensors – chopper and low drift amplifier– electrometer and transimpedance amplifier – charge amplifier – noise in amplifiers – noise and drift in resistors.
Text Books
1. “Data acquisition handbook”, Measurement Computing Corporation, 3/e.
2. Ramon Pallaas -Areny and John G. Webster, “Sensors and Signal Conditioning”,Wiley-Interscience Publication, 2001
INSTRUMENTATION AND CONTROL ENGINEERING
1.1 Introduction to Data Acquisition and Signal Conditioning- Signals, Sensors, and Signal Conditioning - Data Acquisition Systems - PC-Based Data Acquisition Equipment
1 Hour
1.2 ADC Types - Successive-Approximation ADCs - Voltage-to-Frequency ADCs - Integrating ADCs: Dual Slope - Sigma-Delta ADCs
2 Hours
1.3 Accuracy and Resolution - Accuracy vs. Resolution - ADC Accuracy vs. System Accuracy .
1 Hour
1.4 ADC Noise Histograms - ENOB: Effective Number of Bits - The ENOB Test - ADC Output Averaging Benefits - Improved Accuracy - More Stable Readings
1 Hour
1.5 Multiplexing AND SAMPLING THEORY - The Economy of Multiplexing - Sampled-Data Systems . - Solid-State Switches vs. Relays - Speed - Sequence vs. Software-Selectable Ranges
2 Hours
1.6 Fundamental Concepts - Sampling Rates - Source Impedance - Sample-and-Hold ADCs - Nyquist Theorem - Aliasing and Fourier Transforms - Settling Time
2 Hours
2.1 Amplification - Data Acquisition Front Ends - Operational Amplifiers - Inverting Amplifier Stages - Non-Inverting Amplifier Stages - Differential Amplifiers - Programmable-Gain Amplifiers - Instrumentation Amplifiers - A Fundamental Problem - High Common-Mode Amplifiers - Integrated Instrumentation Amplifiers - Programmable-Gain Instrumentation Amplifiers.
2 Hours
2.2 Filtering - Low-Pass Filters - High-Pass Filters - Passive vs. Active Filters - Switched-Capacitance Filters - Attenuation - Voltage Dividers - Buffered Voltage Dividers - Balanced Differential Dividers - High-Voltage Dividers - Compensated Voltage Dividers and Probes.
2 Hours
2.3 Isolation - When Isolation is Required - Isolation Amplifiers - Analog Isolation Modules - Digital Method of Isolation - Inherently Isolated Sensors - Linearization - Why Linearization is Needed - Software Linearization - Hardware Linearization - Circuit Protection - Hazards to Instrumentation Circuits - Overload Protection - ESD Protection .
3 Hours
2.4 Introduction to sensor based instruments – General concept – sensor classification – General input output configuration – static characteristics of measurement system – Dynamic characteristics – other sensor characteristics.
3 Hours
3.1 Resistive sensors – Potentiometer – strain gauges – RTD – 2 Hours 3.2 Thermistor – Magneto resistor – LDR – resistive hygrometer –
resistive gas sensor – liquid conductivity sensor – 1 Hour
3.3 Signal conditioning for resistive sensor – measurement of 3 Hours
Course Contents and Lecture Schedule
No Topic No. of Lectures INSTRUMENTATION AND CONTROL ENGINEERING
resistance – voltage divider – 3.4 Wheatstone bridge measurements – deflection and balance type
– Differential and instrumentation amplifier – interference. 3 Hours
4.1 Reactance variation and electromagnetic sensors – capacitive sensor – inductive sensor – electromagnetic sensor -
3 Hours
4.2 Signal conditioning for reactance variation sensors – problems and alternatives – AC bridge –
3 Hours
4.3 carrier amplifier and coherent detection – specific signal conditioners for capacitive sensor – resolver to digital and digital to resolver converters.
3 Hours
5.1 Self-generating sensors – thermoelectric sensors – piezoelectric sensors –
3 Hours
5.2 pyroelectric sensors – photovoltaic sensors – electrochemical sensors -
3 Hours
5.3 Signal conditioning for Self-generating sensors – chopper and low drift amplifier– electrometer and transimpedance amplifier – charge amplifier – noise in amplifiers – noise and drift in resistors.
2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
SEMESTER V HONOURS
INSTRUMENTATION AND CONTROL ENGINEERING

ICT393 PROCESS DYNAMICS CATEGORY L T P CREDIT VAC 3 1 0 4
Preamble:
The aim of the Process Dynamics course is to make the students capable to analyse the dynamics of a process control system. This course also enables the design controller for multivariable systems.
Prerequisite:
Mathematical course on differential equations, Laplace transform & Z transform, and ICT206 Control Engineering I.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Use different process models like transform domain model, frequency response model, impulse response model, and state-space model.
CO 2 Analyse the dynamic behaviour of linear lower-order systems, higher order systems, and time-delay systems in time domain.
CO 3 Analyse the process dynamics using frequency response methods.
CO 4 Analyse the behaviour of multivariable systems like input/output pairing, interactions, controllability and observability.
CO 5 Apply techniques used to design controllers for multivariable system systematically.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 3 CO 2 3 3 3 CO 3 3 3 3 CO 4 3 3 3 CO 5 3 3 3 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 26 19 45
INSTRUMENTATION AND CONTROL ENGINEERING
Apply 24 31 55 Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. A process has a transform-domain transfer function model: 𝑦𝑦(𝑆𝑆) = 𝑔𝑔(𝑠𝑠)𝑤𝑤(𝑠𝑠)
with
𝑔𝑔(𝑠𝑠) =𝐾𝐾
(𝜏𝜏1𝑆𝑆 + 1)(𝜏𝜏2𝑆𝑆 + 1)
Obtain the equivalent impulse-response model.
Course Outcome 2 (CO2):
1. Derive the differential equation representation of an interacting system shown below, where F0 is the input flow rate (input of the system), and h2 is the head of liquid inside tank 2 (output of this system). Assume constant resistance to flow.
INSTRUMENTATION AND CONTROL ENGINEERING
Course Outcome 3 (CO3):
1. Analyse the difference between the bode diagram of 𝑔𝑔(𝑠𝑠) = 1−0.5𝑒𝑒−10𝑆𝑆(40𝑆𝑆+1)(15𝑆𝑆+1) and the
bode diagram of pure time-delay 𝑔𝑔(𝑆𝑆) = 𝑒𝑒−𝑎𝑎𝑆𝑆 . Assume any value for a.
Course Outcome 4 (CO4):
1. Assuming uniform cross-sectional areas A1 and A2 respectively for Tanks 1 and 2,
derive the mathematical model for the two-tank system shown in following figure.
Assume that the output flows are proportional to the head of liquid inside the
respective tank. Assume any value for 𝛼𝛼,𝛽𝛽 and 𝛾𝛾.
Course Outcome 5 (CO5):
1. The following is a transfer function model representing the dynamic behaviour of a
multivariable system:
INSTRUMENTATION AND CONTROL ENGINEERING
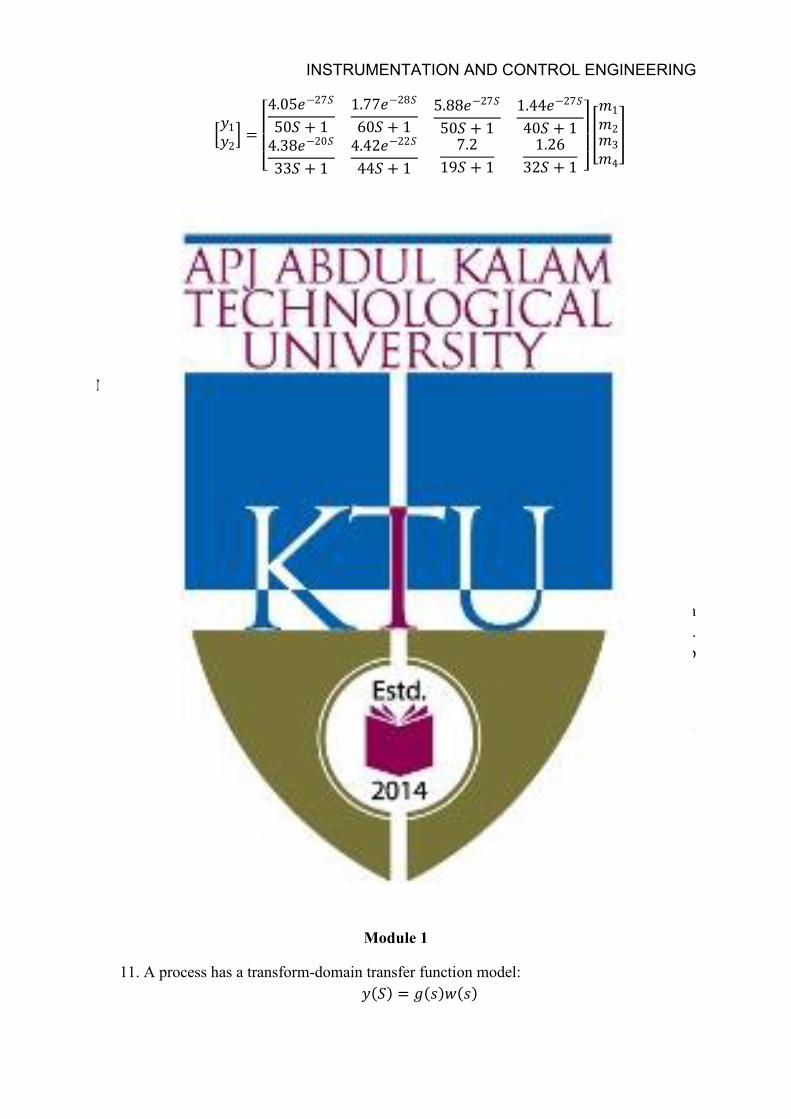
𝑦𝑦1𝑦𝑦2 =
⎣⎢⎢⎡4.05𝑒𝑒−27𝑆𝑆
50𝑆𝑆 + 11.77𝑒𝑒−28𝑆𝑆
60𝑆𝑆 + 14.38𝑒𝑒−20𝑆𝑆
33𝑆𝑆 + 14.42𝑒𝑒−22𝑆𝑆
44𝑆𝑆 + 1
5.88𝑒𝑒−27𝑆𝑆
50𝑆𝑆 + 11.44𝑒𝑒−27𝑆𝑆
40𝑆𝑆 + 17.2
19𝑆𝑆 + 11.26
32𝑆𝑆 + 1 ⎦⎥⎥⎤
𝑚𝑚1𝑚𝑚2𝑚𝑚3𝑚𝑚4
Which of these four inputs should be paired with two outputs?
Model Question paper
Course Code: ICT393
Course Name:PROCESS DYNAMICS
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Explain mathematical model and its utility in process dynamics.2. Explain the main characteristics of pure gain system.3. Explain the overshoot of second order system with a zero.4. Explain the term pole zero excess, and its influence on the step response of a system.5. The dynamic behaviour of a certain process is well represented as a first-order system
with steady-state gain 0.66, time constant 6.7minutes, and a time delay of 2.6minutes.What is the transfer function representation of this process? Find the unit stepresponse of this system.
6. Show that the response of a pure capacity system with transfer function 𝑔𝑔(𝑆𝑆) = 𝐾𝐾𝑆𝑆 to a
sinusoidal input 𝑢𝑢(𝑡𝑡) = 𝐴𝐴 sin(𝜔𝜔𝑡𝑡) is exactly equivalent to the unit step response of anundamped second-order system. Specify the undamped system gain.
7. Discuss the nature of multivariable systems.8. Explain interaction problem.9. Write the properties of the RGA.10. Classify nonsquare systems.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. A process has a transform-domain transfer function model:𝑦𝑦(𝑆𝑆) = 𝑔𝑔(𝑠𝑠)𝑤𝑤(𝑠𝑠)
INSTRUMENTATION AND CONTROL ENGINEERING
with
𝑔𝑔(𝑠𝑠) =𝐾𝐾
(𝜏𝜏1𝑆𝑆 + 1)(𝜏𝜏2𝑆𝑆 + 1)
Obtain the equivalent impulse-response model 12. Discuss about pure capacity systems with an example
Module 2
13. Derive the differential equation representation of an interacting system shown below, where F0 is the input flow rate (input of the system), and h2 is the head of liquid inside tank 2 (output of this system). Assume constant resistance to flow.
14. The following transfer was obtained by correlating input/output data collected from a
series ensemble of three CSTR’s used for the sulphonation reaction in a detergent manufacturing process.
𝑔𝑔(𝑠𝑠) =3.6
(12𝑆𝑆 + 1)(15𝑆𝑆 + 1)(20𝑆𝑆 + 1)
If the final reactor with time constant of 20minute and gain of 1.5 is isolated from the rest, what will be the transfer function of surviving two reactor ensemble?
Module 3
15. Discuss about Pade approximation.
16. Analyse the difference between the bode diagram of 𝑔𝑔(𝑠𝑠) = 1−0.5𝑒𝑒−10𝑆𝑆(40𝑆𝑆+1)(15𝑆𝑆+1) and the
bode diagram of pure time-delay 𝑔𝑔(𝑆𝑆) = 𝑒𝑒−𝑎𝑎𝑆𝑆 . Assume any value for a.
Module 4
17. Assuming uniform cross-sectional areas A1 and A2 respectively for Tanks 1 and 2,
derive the mathematical model for the two-tank system shown in following figure.
Assume that the output flows are proportional to the head of liquid inside the
respective tank. Assume any value for 𝛼𝛼,𝛽𝛽 and 𝛾𝛾.
INSTRUMENTATION AND CONTROL ENGINEERING
18. The transfer function of a 2 × 2 system is given as:
𝐺𝐺(𝑆𝑆) =
15𝑆𝑆 + 1
0.00010.2𝑆𝑆 + 1
1003𝑆𝑆 + 1
10.5𝑆𝑆 + 1
(a) Obtain the steady state gain matrix 𝐾𝐾 = 𝐺𝐺(0) (3)
(b) Find the eigen values of K, and then its singular values. Obtain the ratio of the
larger to the smaller singular values and compare it to the corresponding ratio of
the eigen values. Also explain about the “conditioning” of this process. (8)
(c) By examining the gain matrix, explain about the relative effectiveness of the two
process input variables in affecting the two output variables. (3)
Module 5
19. The following is a transfer function model representing the dynamic behaviour of a
multivariable system:
𝑦𝑦1𝑦𝑦2 =
⎣⎢⎢⎡4.05𝑒𝑒−27𝑆𝑆
50𝑆𝑆 + 11.77𝑒𝑒−28𝑆𝑆
60𝑆𝑆 + 14.38𝑒𝑒−20𝑆𝑆
33𝑆𝑆 + 14.42𝑒𝑒−22𝑆𝑆
44𝑆𝑆 + 1
5.88𝑒𝑒−27𝑆𝑆
50𝑆𝑆 + 11.44𝑒𝑒−27𝑆𝑆
40𝑆𝑆 + 17.2
19𝑆𝑆 + 11.26
32𝑆𝑆 + 1 ⎦⎥⎥⎤
𝑚𝑚1𝑚𝑚2𝑚𝑚3𝑚𝑚4
Which of these four inputs should be paired with two outputs?
20. Discuss about the procedure of designing controller for multivariable systems.
INSTRUMENTATION AND CONTROL ENGINEERING
Syllabus
PROCESS DYNAMICS
Module 1 (9 Hours)
Process Dynamics
Formulating process models: general conservation principle, the transform domain model, frequency response model, impulse response model; inter relationship between process model forms: continuous and discrete-time models, state space and transform domain models, state-space and frequency domain models, stae-space and impulse response models, transform domain and impulse response models, transform domain and frequency response models, frequency response and impulse response; Negative feedback: oscillation in a closed loop, period of oscillation, damping.
Dynamic Behaviour of Linear Lower Order Systems
First order systems: characteristic parameter; review of response of first order systems to various inputs; pure gain systems: physical examples of pure gain systems, response of pure gain systems to various inputs; Pure capacity systems (easy element): physical examples of pure capacity systems, response of pure capacity systems to various inputs, comparison between non-self-regulating process and self-regulating process; The Lead/Lag system: obtaining the dynamic response, unit step response.
Module 2 (9 Hours)
Dynamic Behaviour of Linear Higher Order Systems
Two first order systems in series: two non-interacting systems in series, unit response of non-interacting systems in series, the interacting systems; Second order systems: characteristic parameter, review of response of second order systems to various inputs, characteristics of under damped response; N first order systems in series: characteristic parameters, unit step response, a special limiting case; higher order systems with zeros: unit step response of the (2,1) order system, unit step response of the general (p,q) order system.
Module 3 (10 Hours)
Time-delay Systems
Difficult element: physical considerations, mathematical model and analysis; pure time delay process: response to various inputs, magnitude and phase shift of dead time, limiting behaviour of first order systems in series; dynamic behaviour of systems with time delay: physical example, general considerations, approximate behaviour of very higher order
INSTRUMENTATION AND CONTROL ENGINEERING
systems; rational transfer function approximation: pade approximations, higher order system approximation; model equations for systems containing time delays.
Frequency Response Analysis
Fundamental frequency response result; frequency response of several response in series; lower order systems: first-order system, pure-gain system, pure capacity system, first order lead system, lead/lag system; Higher order systems: two first order systems in series, second order system, other higher order systems; frequency response of feedback controllers.
Module 4 (9 Hours)
Multivariable Systems
Nature of multivariable systems: input/output pairing, interactions, controllability and observability; Multivariable process models: state-space model form, transfer function model form, inter relationship between model forms; Open-loop dynamic analysis in state-space: analytical solutions, unit step responses, stability; Multivariable transfer functions and open-loop dynamic analysis: multivariable system poles, multivariable system zeros, quantitative measure of singularity, dynamic analysis; Closed loop dynamic analysis: multivariable block diagrams, closed loop behaviour, closed loop transient responses.
Module 5 (8 Hours)
Interaction Analysis and Multiple Single-loop Designs
Preliminary considerations of interaction analysis and loop pairing: measure of control loop interactions, loop pairing on the basis of interaction analysis; Relative gain array (RGA): properties of the RGA, calculating the RGA; Loop pairing using the RGA: interpreting the RGA elements, basic loop pairing rules, applications of the loop pairing rules; Loop pairing for nonlinear systems; loop pairing for systems with pure integrator modes; loop pairing for non-square systems.
Text Books
1. Babatunde A. Ogunnaike & W. Harmon Ray, “Process Dynamics Modeling, and Control”, Oxford University Press, 1/e.
Reference Books
1. Brian Roffel and Ben Betlem, “Process Dynamics and Control Modeling for Control and Prediction”, Wiley, 1/e.
INSTRUMENTATION AND CONTROL ENGINEERING
2. Dale E. Seborg, Thomas F. Edgar, and Duncan A. Mellichamp, “Process Dynamicsand Control”, Wiley, 2/e.
3. J M Douglas, “Process Dynamics and Control Volume 1 Analysis of DynamicSystems”, Prentice Hall of India.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Process Dynamics (5 Hours)
1.1 Formulating process models: general conservation principle, the transform domain model, frequency response model, impulse response model.
2 Hours
1.2 inter relationship between process model forms: continuous and discrete-time models, state space and transform domain models, state-space and frequency domain models, stae-space and impulse response models, transform domain and impulse response models, transform domain and frequency response models, frequency response and impulse response.
2 Hours
1.3 Negative feedback: oscillation in a closed loop, period of oscillation, damping.
1 Hour
Dynamic Behaviour of Linear Lower Order Systems (4 Hours) 1.4 First order systems: characteristic parameter; review of response
of first order systems to various inputs; pure gain systems: physical examples of pure gain systems, response of pure gain systems to various inputs.
2 Hours
1.5 Pure capacity systems (easy element): physical examples of pure capacity systems, response of pure capacity systems to various inputs, comparison between non-self-regulating process and self-regulating process.
1 Hour
1.6 The Lead/Lag system: obtaining the dynamic response, unit step response.
1 Hour
2 Dynamic Behaviour of Linear Higher Order Systems (9 Hours)
2.1 Two first order systems in series: two non-interacting systems in series, unit response of non-interacting systems in series, the interacting systems.
3 Hours
2.2 Second order systems: characteristic parameter, review of response of second order systems to various inputs, characteristics of under damped response.
3 Hours
2.3 N first order systems in series: characteristic parameters, unit step response, a special limiting case; higher order systems with
3 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
zeros: unit step response of the (2,1) order system, unit step response of the general (p,q) order system.
3 Time-delay Systems (6 Hours) 3.1 Difficult element: physical considerations, mathematical model
and analysis; pure time delay process: response to various inputs, magnitude and phase shift of dead time, limiting behaviour of first order systems in series; dynamic behaviour of systems with time delay: physical example, general considerations, approximate behaviour of very higher order systems.
4 Hours
3.2 rational transfer function approximation: pade approximations, higher order system approximation; model equations for systems containing time delays.
2 Hours
Frequency Response Analysis (4 Hours) 3.3 Fundamental frequency response result; frequency response of
several response in series; lower order systems: first-order system, pure-gain system, pure capacity system, first order lead system, lead/lag system.
2 Hours
3.4 Higher order systems: two first order systems in series, second order system, other higher order systems; frequency response of feedback controllers.
2 Hours
4 Multivariable Systems (9 Hours)
4.1 Nature of multivariable systems: input/output pairing, interactions, controllability and observability.
1 Hour
4.2 Multivariable process models: state-space model form, transfer function model form, inter relationship between model forms.
2 Hours
4.3 Open-loop dynamic analysis in state-space: analytical solutions, unit step responses, stability.
2 Hours
4.4 Multivariable transfer functions and open-loop dynamic analysis: multivariable system poles, multivariable system zeros, quantitative measure of singularity, dynamic analysis.
2 Hours
4.5 Closed loop dynamic analysis: multivariable block diagrams, closed loop behaviour, closed loop transient responses.
2 Hours
5 Interaction Analysis and Multiple Single-loop Designs (8 Hours) 5.1 Preliminary considerations of interaction analysis and loop
pairing: measure of control loop interactions, loop pairing on the basis of interaction analysis.
2 Hours
5.2 Relative gain array (RGA): properties of the RGA, calculating the RGA.
2 Hours
5.3 Loop pairing using the RGA: interpreting the RGA elements, basic loop pairing rules, applications of the loop pairing rules.
2 Hours
5.4 Loop pairing for nonlinear systems; loop pairing for systems 2 Hours with pure integrator modes; loop pairing for non-square systems.
INSTRUMENTATION AND CONTROL ENGINEERING
ICT395 PRINCIPLES OF ROBOTICS CATEGORY L T P CREDIT VAC 3 1 0 4
Preamble:
The course on robotics is intended to provide a reasonable understanding of robotics, how they function, the mathematics behind position, motion and dynamics of robot.
Prerequisite:
Strong foundation in Engineering Mathematics,Basic Instrumentation and Transducers.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Explain the basic structure of robots.
CO 2 Explain the working of various sensors incorporated in robots.
CO 3 Derive the mathematical representation of robot with respect to position and orientation.
CO 4 Discuss about manipulator differential motion and statics.
CO 5 Discuss about the applications of Robotics.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 2 3 CO 2 2 3 CO 3 3 3 3 3 CO 4 3 3 CO 5 2 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 50 40 90 Apply 10 10 Analyse Evaluate Create
INSTRUMENTATION AND CONTROL ENGINEERING
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Explain the mechanisms and transmission of end effectors in robotic system.
2. Briefly explain the various classification of robots.
3. Explain the role of grippers in robotic system.
Course Outcome 2 (CO2):
1. With the help of diagram explain pneumatic drive system.
2. Explain the role of force sensors and pressure sensors in robotic control.
3. Explain the working of hydraulic drive system in robotics.
Course Outcome 3 (CO3):
1. The arm with three degrees of freedom shown in figure, where the joint l's axis is notparallel to the other two. Instead, there is a twist of 90 degrees in magnitude betweenaxes 1 and 2. Derive link parameters and the kinematic equations for 𝐵𝐵
𝑊𝑊𝑇𝑇.
INSTRUMENTATION AND CONTROL ENGINEERING
2. Explain the concept of closed form solution in kinematics.
3. Write the mathematical representation of Robots with respect to Position andOrientation.
Course Outcome 4 (CO4):
1. Derive forward & inverse kinematics equations of manipulator for a particularposition.
2. Explain the following:
(i) Wrist and arm singularity
(ii) Linear and Angular velocities.
3. Explain force and moment balance in robotics.
Course Outcome 5 (CO5):
1. Explain the concept of adaptive control in robotics.
2. Write a note on various applications of robots.
3. What are the various feedback devices used in robotics?
Model Question paper
Course Code: ICT395
Course Name:PRINCIPLES OF ROBOTICS
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
INSTRUMENTATION AND CONTROL ENGINEERING
1. Mention the specifications of an industrial Robot. 2. Explain the role of actuators in robotic system. 3. Explain the concept of light sensors used in robotic control. 4. Explain the working principle of tactile sensor. 5. Write down a homogenous transformation matrix used in robotics and explain its
components. 6. Explain cylindrical and spherical joints in robotic control. 7. Give the difference between the prismatic and rotary joints. 8. Define the term Lagrangian function. 9. Explain On-line and off-line programming in robotics. 10. Explain the role of encoders and resolvers used in robotic control.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. Explain the basic terminologies in robotic system and also explain the components of robotic system.
12. Explain the following grippers in robotic system. a. Cam type gripper. b. Magnetic grippers. c. Vacuum grippers. d. Air operated grippers.
Module 2
13. Explain the different types of electrical drives used in robot actuation. 14. Explain the principle of the following sensors and also mention how they are used in
robots. a. Proximity and range sensor. b. Touch sensor.
Module 3
15. The arm with three degrees of freedom shown in figure, where the joint l's axis is not parallel to the other two. Instead,there is a twist of 90 degrees in magnitude between axes 1 and 2. Derive linkparameters and the kinematic equations for𝐵𝐵
𝑊𝑊𝑇𝑇.
INSTRUMENTATION AND CONTROL ENGINEERING
16. Explain the various types of kinematic joints in robotic control.
Module 4
17. Enumerate with neat schematic diagram Cartesian space moments of a two degree of
freedom robot.
18. Discuss about the Jacobian singularities and computation of wrist and arm
singularities.
Module 5
19. (a) Explain the concept of Point to point and Continuous path control in robotics.
(b) Explain the concept of Material handling in robotics.
20. Explain the role of robotics in the following areas. a. Machine loading and unloading. b. Spray painting.
Syllabus
ICT375 PRINCIPLES OF ROBOTICS
Module 1 (8 Hours)
Introduction to Robotics
History of robots, Classification of robots, Present status and future trends. Basic components of robotic system.
Basic terminology- Accuracy, Repeatability, Resolution, Degree of freedom. Mechanisms and transmission of end effectors, Grippers-different methods of gripping, Mechanical grippers-Slider crank mechanism, Screw type, Rotary actuators, Cam type gripper, Magnetic grippers, Vacuum grippers, Air operated grippers; Specifications of robot
INSTRUMENTATION AND CONTROL ENGINEERING
Module 2 (8 Hours)
Drive systems and Sensors
Drive system- Hydraulic, Pneumatic and Electric Systems
Sensors in robot – Touch sensors, tactile sensor, Proximity and range sensors, Robotic vision sensor, Force sensor, Light sensors, Pressure sensors.
Module 3 (10 Hours)
Direct and Inverse Kinematics
Mathematical representation of Robots – Position and orientation – Homogeneous transformation-
Various joints- Representation using the Denavit Hattenberg parameters -Degrees of freedom-Direct
Kinematics-Inverse kinematics-PUMA560 & SCARA robots- Solvability – Solution methods-Closed form solution.
Module 4 (9 Hours)
Manipulator Differential Motion and Statics
Linear and angular velocities-Manipulator Jacobian-Prismatic and rotary joints Inverse –Wrist and arm singularity – Static analysis – Force and moment Balance.
Module 5 (10 Hours)
Robot Control, Programming and Applications
Robot controls-Point to point control, Continuous path control, intelligent robot, Control system for robot joint.
Control actions-Feedback devices, Encoder, Resolver, LVDT, Motion Interpolations, Adaptive control.
Introduction to Robotic Programming-On-line and off-line programming, programming examples.
Robot applications-Material handling, Machine loading and unloading, assembly, Inspection, Welding, Spray painting
INSTRUMENTATION AND CONTROL ENGINEERING
Text Books
1. R.K.Mittal and I.J.Nagrath, “Robotics and Control”, McGraw Hill Education, 2017.
2. John J.Craig, “Introduction to Robotics Mechanics and Control”, Pearson EducationIndia, 3/e.
3. M.P.Groover, M.Weiss,R.N. Nageland N. G.Odrej, “Industrial Robotics”, McGrawHill Education, 2/e.
Reference Books
1. S.R. Deb, “Robotics Technology and flexible automation”, McGraw Hill Education,2/e.
2. Richard D. Klafter, Thomas .A, ChriElewski, Michael Negin, "Robotics Engineeringan Integrated Approach", PHI Learning., 2009.
3. Ken Waldron , Jim Schmiedeler, “Handbook of Robotics”, USA,2007.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Introduction to Robotics (8 Hours)
1.1 History of robots, Classification of robots, Present status and future trends, Basic components of robotic system
2
1.2 Basic terminology- Accuracy, Repeatability, Resolution, Degree of freedom.
1
1.3 Mechanisms and transmission of end effectors, Specifications of a robot.
2
1.4 Grippers-different methods of gripping, Mechanical grippers-Slider crank mechanism, Screw type, Rotary actuators, Cam type gripper, Magnetic grippers, Vacuum grippers, Air operated grippers
3
2 Drive systems and Sensors (8 Hours)
2.1 Hydraulic drive system, Pneumatic drive system ,Electric drive system
4
2.2 Sensors in robot – Touch sensors, Tactile sensor, Proximity and range sensors, Robotic vision sensor, Force sensor, Light sensors, Pressure sensors.
4
3 Direct And Inverse Kinematics (10 Hours)
3.1 Mathematical representation of Robots – Position and orientation – Homogeneous transformation-Various joints.
3
INSTRUMENTATION AND CONTROL ENGINEERING
3.2 Representation using the Denavit Hattenberg parameters - 2 3.3 Degrees of freedom-Direct kinematics-Inverse kinematics 2 3.4 PUMA560 & SCARA robots 2 3.5 Solvability – Solution methods-Closed form solution. 1
4 Manipulator Differential Motion And Statics (9 Hours)
4.1 Linear and angular velocities-Manipulator Jacobian-Prismatic and rotary joints Inverse –Wrist and arm singularity – Static analysis – Force and moment Balance.
9 Hours
5 Robot Control, Programming and Applications (10 Hours) 5.1 Robot controls-Point to point control, Continuous path control,
Intelligent robot, Control system for robot joint. 2
5.2 Control actions, Feedback devices, Encoder, Resolver 2 5.3 LVDT, Motion Interpolations, Adaptive control 2 5.4 Introduction to Robotic Programming, On-line and off-line
programming, programming examples 2
5.5 Robot applications-Material handling, Machine loading and unloading, assembly, Inspection, Welding, Spray painting.
2
INSTRUMENTATION AND CONTROL ENGINEERING
SEMESTER VI
INSTRUMENTATION AND CONTROL ENGINEERING
ICT302 INDUSTRIAL INSTRUMENTATION 2 CATEGORY L T P CREDIT PCC 3 1 0 4
Preamble:
The aim of the Industrial Instrumentation-II course is to familiarize the students about varioustypes of flow measurement devices and gas analysers and also to introduce the basic operation of control valves, various types of control valves and control valve accessories.
Prerequisite:
Basics of instrumentation Engineering and Transducers.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Explain the physics of flow measurement, linearization, compensation and calibration in flow measurement.
CO 2 Explain different types of differential pressure type flow measurement devices and its selection.
CO 3 Explain different types of mechanical flow measurement variable area flow meter devices and its selection.
CO 4 Explain special types of flow measurement devices like electromagnetic, ultrasonic, vortex flowmeter thermal flow meters, Coriolis Mass Flowmeters and open channel flow meter and discuss different types of gas analysers and its requirements.
CO 5 Discus and familiarize with various types of control valves, control valve accessories and their operation.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 3 CO 2 3 3 CO 3 3 3 CO 4 3 3 CO 5 3 3
INSTRUMENTATION AND CONTROL ENGINEERING
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 50 50 100 Apply Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Explain about the calibration methods in flow meter.
2. Describe the linearization of flow meter.
Course Outcome 2 (CO2):
1. Explain the working of differential pressure flow meter.
2. Explain about locations and types of pressure taps in orifice meter.
Course Outcome 3 (CO3):
1. Explain the working of mechanical flow meter and different types.
2. Write a note on inferential flow meter.
INSTRUMENTATION AND CONTROL ENGINEERING
Course Outcome 4 (CO4):
1. Explain the working of miscellaneous flow meter.
2. Explain the methods to analyse flue gas.
Course Outcome 5 (CO5):
1. List out the advantages and disadvantages of different control valve types.
2. Write a note on control valve accessories.
Model Question paper
Course Code: ICT302
Course Name:INDUSTRIAL INSTRUMENTATION 2
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Explain law of continuity.2. Differentiate volumetric flow rate and mass flow rate.3. Write a brief note on dall tube. Discuss the advantages and disadvantages of dall tube.4. List out the general features of differential pressure flow meters.5. Explain nutating disc flow meter.6. List out the advantages and disadvantages of positive displacement flow meter.7. Write a note on zirconium oxygen analyser with neat diagram.8. Explain Weir type flow meter.9. Write a note on Pressure regulator.10. Write a note on control valve actuators.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. (a) Explain flow meter calibration. (10)(b) write a note on viscosity and Reynolds number. (4)
12. (a) Explain about Gas Flow Pressure and Temperature Compensation. (10)(b) Write a note on Flow Computers. (4)
INSTRUMENTATION AND CONTROL ENGINEERING
Module 2
13. Explain the working of Venturi meter. List out the limitations of venturi meter? Also explain the different types of venturi meter with neat diagram.
14. Explain pitot tube with proper diagram? List out the disadvantages of pitot tube. Also explain the method of use of pitot tube for circular duct and rectangular duct.
Module 3
15. Explain the working of reciprocating piston flow meter - 2 piston type and 4 piston type with neat diagram.
16. (a) Explain the workingof oscillating piston flow meter with neat diagram. (7) (b) Explain the working of rotameter with necessary equations. (7)
Module 4
17. Explain the working and list out the advantages of (a) Electromagnetic flow meter and
(b) ultrasonic flow meter.
18. Explain the operation and theory behind the working of vortex shedding flow meter?
Write a note on different bluff body design? Also explain the different methods used
for the measurement of vortex frequency.
Module 5
19. Explain different types of control valve noise and methods of reduction.
20. Write a note on (a) gate valve (b) Diaphragm Valve(c) safety and relief valve.
Syllabus
INDUSTRIAL INSTRUMENTATION 2
Module 1 (9 Hours)
Introduction to the physics of flow rate and total flow measurement
volumetric flow rate-mass flow rate- rate of flow measurement- classification of flow meters.
Fluid mechanics concept
viscosity-Reynolds number-flow regimes-laminar flow-turbulent flow-transitional flow- law of continuity - Bernoulli’s equation.
Linearization and compensation of flow meters
INSTRUMENTATION AND CONTROL ENGINEERING
Linear and Nonlinear Flow meters - Gas Flow Pressure and Temperature Compensation - Liquid Temperature Compensation - Pressure and Temperature Tap Location - Flow Computers - Multivariable Flowmeters.
Flow meter calibration
Calibration Techniques - Flow Laboratory - Flow Calibration Facility - Dry Calibration - Electronic Techniques - Scaling Factor Calibration - Analog Output Calibration.
Module 2 (9 Hours)
Differential pressure flow meter- theory, construction and applications
Venturi meter-types of venturi meter - limitations-pressure tapping in venturi meter - orifice meter - types of orifice meter - pressure taps - limitations. pitot tubes - limitations - method of use for circular duct and rectangular duct-precautions during installation of pitot tube- Dall tube - installation- flow nozzle- different types of flow nozzle-long radius nozzle-ISA 1932 nozzle- generalised features of differential pressure type flow meter- installation requirement with differential pressure flow meter-target flow meter.
Module 3 (9 Hours)
Positive displacement flow meters -theory, construction and applications
reciprocating piston flow meter - 2 piston type and 4 piston type- Oscillating piston flow meter - nutating disc flow meter - helix meter - rotating vane flow meter - oval wheel flow meter.
Inferential flow meters -theory, construction and applications
single and multi-jet flow meter - propeller type flow meter - double rotor propeller type flow meter - turbine flow meter.
Variable area flow meter - theory, construction and applications
rotameter - rotameter basic equation - rotameter classification - rotameter components - installation.
Module 4 (8 Hours)
Miscellaneous flow meters- theory, construction and applications
INSTRUMENTATION AND CONTROL ENGINEERING
Electromagnetic flow meters -Ultrasonic flow meters- Vortex shedding flow meters - thermal flow meter- Coriolis Mass Flowmeters - open channel flow meter-weir type and Parshall Flumes type.
Gas Analyser
Thermal conductivity type analyser - Heat of reaction method - Paramagnetic method - Zirconia oxygen analyser - Electro chemical reaction method - spectroscopic analysis: IR radiation absorption type.
Module 5 (10 Hours)
Control valves
General diagram - final control operation - basic parts - valve body - Bonnet - stem - Actuator - Packing - Seat - Disk - electrical and pneumatic signal conversion - electric, pneumatic & hydraulic actuators - valve characteristics.
Different types of control valves- disc, stem and seat design and applications
gate valve - globe valve - plug valve - ball valve - butterfly valve - diaphragm valve - pinch valve - needle valve - safety and relief valves.
Control valves accessories
Positioners - Filters - Pressure regulator - Limit switch - proximity switch – solenoids.
Control valve noise and methods of its reduction
Mechanical Vibration-Aerodynamic Noise - Hydrodynamic Noise.
Text Books
1. Arora.Y.L, “Flow measurement techniques”, University Book .corp.
2. F Frenzel, H Grothey et. al., “Industrial flow measurement basics and practices”, ABB Automation products. (for Module-1).
3. David W. Spitzer, “Industrial Flow Measurement”, ISA – The Instrumentation, Systems, and Automation Society, 3/e. (for Module-1).
4. Peter Smith and R W Zappe, “Valve selection Handbook”, Gulf Professional Publishing, 5/e.
5. Philip L Skousen, “Valve HandBook”, McGraw Hill Education, 3/e.
6. D Patranabis, “Principles of Industrial Instrumentation”, Tata McGraw Hill Pub. (Module-4).
INSTRUMENTATION AND CONTROL ENGINEERING
Reference Books
1. Tony R Kuphaldt, “Lessons in industrial instrumentation”, Samurai Media Limited.
2. Eckman D.P., “Automatic Process Control”, Wiley Eastern.
3. Fribance, “Industrial instrumentation fundamentals”, Mc Graw hill.
4. Patranabis D, “Principles of Process Control”, McGraw Hill Education, 3/e.
5. Rangan,Sarma and Mani , “Instrumentation- Devices and systems”, McGraw HillEducation, 2/e.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1.1 Introduction to the physics of flow rate and total flow
measurement-volumetric flow rate-mass flow rate- rate of flow measurement- classification of flow meters-
2 Hours
1.2 fluid mechanics concept-viscosity-Reynolds number-flow regimes-laminar flow-turbulent flow-transitional flow- law of continuity - Bernoulli’s equation.
3 Hours
1.3 Linear and Nonlinear Flow meters - Gas Flow Pressure and Temperature Compensation - Liquid Temperature Compensation. Pressure and Temperature Tap Location - Flow Computers - Multivariable Flowmeters.
2 Hours
1.4 Flow meter calibration - Calibration Techniques - Flow Laboratory - Flow Calibration Facility - Dry Calibration - Electronic Techniques - Scaling Factor Calibration - Analog Output Calibration.
3 Hours
2 Differential pressure flow meter- theory, construction and applications
2.1 Venturi meter-types of venturi meter - limitations-pressure tapping in venturi meter -
2 Hours
2.2 orifice meter - types of orifice meter - pressure taps - limitations. 2 Hours 2.3 pitot tubes - limitations - method of use for circular duct and
rectangular duct-precautions during installation of pitot tube- 2 Hours
2.4 Dall tube - installation- flow nozzle- different types of flow nozzle-long radius nozzle-ISA 1932 nozzle-
2 Hours
2.5 generalised features of differential pressure type flow meter- installation requirements with differential pressure flow meter-target flow meter.
1 Hour
3.1 reciprocating piston flow meter - 2 piston type and 4 piston type- 2 Hours 3.2 Oscillating piston flow meter - nutating disc flow meter - helix
meter - rotating vane flow meter - oval wheel flow meter. 3 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
3.3 single and multi-jet flow meter - propeller type flow meter - double rotor propeller type flow meter - turbine flow meter.
2 Hours
3.4 rotameter - rotameter basic equation - rotameter classification - rotameter components - installation.
2 Hours
4.1 Electromagnetic flow meters 1 Hour 4.2 Ultrasonic flow meters- 1 Hour 4.3 Vortex shedding flow meters - different type so design and
measurement 1 Hour
4.4 thermal flow meter- 1 Hour 4.5 Coriolis Mass Flowmeters - open channel flow meter-weir type
and Parshall Flumes type. 1 Hour
4.6 Thermal conductivity type analyser - Heat of reaction method - 1 Hour 4.7 Paramagnetic method - Zirconia oxygen analyser - 1 Hour 4.8 Electro chemical reaction method - spectroscopic analysis: IR
radiation absorption type. 1 Hour
5 5.1 Control valves – General diagram - final control operation - basic
parts - valve body - Bonnet - stem - Actuator - Packing - Seat - Disk - electrical and pneumatic signal conversion - electric, pneumatic & hydraulic actuators - valve characteristics - -
3 Hours
5.2 Different types of control valves- disc, stem and seat design and applications- gate valve - globe valve - plug valve - ball valve - butterfly valve - diaphragm valve - pinch valve - needle valve - safety and relief valves.
3 Hours
5.3 Control valves accessories - Positioners - Filters - Pressure regulator - Limit switch - proximity switch - solenoids.
2 Hours
5.4 Control valve noise and methods of its reduction-Mechanical Vibration-Aerodynamic Noise - Hydrodynamic Noise.
2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICT304 PROCESS CONTROL CATEGORY L T P CREDIT PCC 3 1 0 4
Preamble:
The aim of the ICT304 Process Control course to familiarise the students about the elements of process control, continuous and discontinuous control modes, and multi-loop control modes. This course also enables the students to tune the control mode.
Prerequisite:
Basics of Instrumentation Engineering.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Describe the elements of process control loops, final control, and discrete-state process control.
CO 2 Explain and compare the principle and concept of continuous and discontinuous control modes.
CO 3 Design electronic circuits for controller with respect to the process needs and use pneumatic control modes to satisfy different process needs.
CO 4 Determine the values of parameters of control loops with respect to the response of the plant.
CO 5 Explain multiple control loops with respect to the type of disturbances.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 2 2 CO 2 2 2 CO 3 3 2 3 CO 4 3 3 3 3 CO 5 2 2
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 28 12 40
INSTRUMENTATION AND CONTROL ENGINEERING
Apply 22 38 60 Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Distinguish between Controlled variable and Manipulated variable. (3 marks)
2. Explain the working principle of hydraulic actuator. (3 marks)
3. Write narrative statements for the process shown below. Here a fixed weight of material is taken into hopper using conveyor belt. This material added to tank by opening hopper valve if liquid level is up to L1. Then the mixture is stirred by stir motor and temperature is maintained between TH and TL using heater. After 10 minutes the mixture is removed through output valve, and then the process is repeated. (10 marks)
INSTRUMENTATION AND CONTROL ENGINEERING
Course Outcome 2 (CO2):
1. What is the main drawback of Proportional mode controller? (3 marks)
2. What is the significance of neutral zone in two position controllers? (3 marks)
3. Given the error as in figure, plot a graph of a PI controller output as a function of time where proportional gain KP=5, integral gain KI=10/sec and bias = 20%. (10 marks)
4. What is meant by direct and reverse actions of a controller? Explain with examples. (4 marks)
Course Outcome 3 (CO3):
1. Explain analog signal conditioning. (3 marks)
2. Under what conditions pneumatic controllers are preferred over electronic controllers? (3 marks)
3. Design an electronic PID controller with the following specifications PB=25%,Kd=20, Ki=2.5. (14 marks)
Course Outcome 4 (CO4):
1. Explain open loop tuning method. (3 marks)
2. Compare the characteristics of tuning methods. (3 marks)
3. In the Ziegler-Nichols method, the critical gain was found to be 4.2 and the critical period was 2.21 minutes. Find the standard settings for PI and PID controls. (14 marks)
Course Outcome 5 (CO5):
1. Discuss about the feed forward controller. (3 marks)
2. Explain about inferential control. (3 marks)
INSTRUMENTATION AND CONTROL ENGINEERING
3. Consider the air heating system used to regulate the temperature in a house (shown inthe figure). The heat is supplied from the combustion of fuel oil.
a. Identify the control objectives, the available measurements, and manipulatedvariables. What are the external disturbances for such a system? (5 marks)
b. Develop a feedback control configuration to achieve your control objectives.(4 marks)
c. Is a feed forward control configuration possible for achieving your controlobjectives? (2 marks)
d. What are the practical aspects of the design of feed forward control? (3 marks)
Model Question paper
Course Code: ICT304
Course Name: PROCESS CONTROL
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Distinguish between Controlled variable and Manipulated variable.2. Explain the working principle of hydraulic actuator.3. What is the main drawback of Proportional mode controller?4. What is the significance of neutral zone in two position controllers?5. Explain analog signal conditioning?6. Under what conditions pneumatic controllers are preferred over electronic
controllers?
INSTRUMENTATION AND CONTROL ENGINEERING
7. Explain open loop tuning method. 8. Compare the characteristics of tuning methods. 9. Discuss about the feed forward controller. 10. Explain about inferential control.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. (a) Write narrative statements for the process shown below. Here a fixed weight of material is taken into hopper using conveyor belt. This material added to tank by opening hopper valve if liquid level is upto L1. Then the mixture is stirred by stir motor and temperature is maintained between TH and TL using heater. After 10 minutes the mixture is removed through output valve, and then the process is repeated. (10 marks)
(b) Define a) Proportional band b)Proportional Gain c) Integral time d) Repeats per minute. (4 marks)
12. (a) A speed control process is shown in following figure. Draw the block diagram of final control operation of this process, and explain each element of the block diagram you had drawn. (9 marks)
(b) What is the need of control system evaluation? Explain. (5 marks)
INSTRUMENTATION AND CONTROL ENGINEERING
Module 2
13. (a) Given the error as in figure, plot a graph of a PI controller output as a function of time where proportional gain KP=5, integral gain KI=10/sec and bias = 20%. (10 marks) (b) What is meant by direct and reverse actions of a controller? Explain with examples. (4 marks)
14. (a) Discuss about the process characteristics: process equation, controlled variable, manipulating variable, control variable, process load, process lag, and self-regulating process. (10 marks) (b) Is two position control a discrete state process control? Explain. (4 marks)
Module 3
15. Suggest a pneumatic setup for proportional plus derivative control mode with a neat diagram. Derive the analytic equation of pneumatic controller, you suggested.
16. (a) Design an electronic PID controller with the following specifications PB=25%,Kd=20, Ki=2.5. (8 marks) (b) Sketch pneumatic PI controller and explain. (6 marks)
Module 4
17. In the Ziegler-Nichols method, the critical gain was found to be 4.2 and the critical
period was 2.21 minutes. Find the standard settings for P, PI and PID controls.
18. A step input with a value of 2.5V in 0-5 V range is given to an open-loop system
whose output response is as shown below with range of 100 to 200 cm.
(a) Tune the PID controller using open-loop tuning. (4 marks)
(b) Using the values obtained from (a), design a PID controller whose output range is
0-5V where the range of voltage signal given by capacitive level transducer is 0 to
10 V. Set point is 160 cm. (6 marks)
(c) Draw the block diagram representation of above process controller. Also write the
transfer function of process. (4 marks)
Module 5
INSTRUMENTATION AND CONTROL ENGINEERING
19. How many types of selective control systems are available? Discuss their
characteristics.
20. Consider the air heating system used to regulate the temperature in a house (shown in the figure). The heat is supplied from the combustion of fuel oil.
(a) Identify the control objectives, the available measurements, and manipulated
variables. What are the external disturbances for such a system? (5 marks) (b) Develop a feedback control configuration to achieve your control objectives. (4
marks) (c) Is a feed forward control configuration possible for achieving your control
objectives? (2 marks) (d) What are the practical aspects of the design of feed forward control? (3 marks)
Syllabus
PROCESS CONTROL
Module 1 (10 Hours)
Introduction to process control
Process, process variables, need for process control, basic control actions, process control block diagram.
Control system evaluation
Control system objective, evaluation criteria.
Final control operation
Signal conversion (analogue and digital electrical signals), actuators (electric, pneumatic and hydraulic), control elements (mechanical, electrical and fluid valves).
Discrete-state process control
INSTRUMENTATION AND CONTROL ENGINEERING
Characteristics of the system, discrete-state variables, process specifications.
Module 2 (9 Hours)
Controller principles
Process characteristics, control system parameters.
Discontinuous controller modes
Two position mode, multi-position mode, floating control mode.
Continuous controller modes
Proportional controller mode, integral controller mode, derivative controller mode, composite controller modes-PI, PD and three mode.
Module 3 (8 Hours)
Electronic controllers
General features, error detectors. Single mode, composite controller modes (should be discussed about the design of control modes using OPAMP).
Pneumatic controllers
Continuous controller modes (should be discussed about the principle of design of pneumatic P, PI, PD and PID control mode).
Module 4 (8 Hours)
Process loop tuning
Tuning of controllers, Cohen-Coon method of tuning (process reaction curve method). Ultimate cycle method (Ziegler Nichol’s method), damped oscillation method. Frequency response method, comparing tuning methods.
Module 5 (10 Hours)
Control systems with multiple loops
Cascade control, feed forward and feedback control, Ratio control, selective control, and inferential control
INSTRUMENTATION AND CONTROL ENGINEERING
Text Books
1. Curtis Johnson, “Process Control Instrumentation Technology”, Pearson, 8/e.
2. B.G.Liptak, “Handbook on Process Control”, Chiller Book and Co.
Reference Books
1. George Stephanopoulos, “Chemical Process Control An Introduction to Theory andPractice”, Pearson Education India, 1/e.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Introduction to process control
1.1 Process, process variables, need for process control, basic control actions, process control block diagram.
2 Hours
1.2 Control system evaluation: Control system objective, control system evaluation criteria.
2 Hours
1.3 Final control operation: signal conversion (analogue and digital electrical signals), actuators (electric, pneumatic and hydraulic), control elements (mechanical, electrical and fluid valves)
3 Hours
1.4 Discrete-state process control: characteristics of the system, discrete-state variables, process specifications.
3 Hours
2 Controller principles
2.1 Process characteristics, control system parameters. 2 Hours 2.2 Discontinuous controller modes: Two position mode, multi-
position mode, floating control mode. 2 Hours
2.3 Continuous controller modes: Proportional controller mode, integral controller mode, derivative controller mode, composite controller modes-PI, PD and three mode.
5 Hours
3 Electronic controllers
3.1 General features, error detectors. Single mode, composite controller modes.
6 Hours
3.2 Pneumatic controllers: Continuous controller modes. 2 Hours 4 Process loop tuning
4.1 Tuning of controllers, Cohen-Coon method of tuning (process reaction curve method).
2 Hours
4.2 Ultimate cycle method (Ziegler Nichol’s method). 2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
4.3 damped oscillation method. Frequency response method. 2 Hours 4.4 comparing tuning methods. 2 Hours 5 Control systems with multiple loops 5.1 Disturbances, types, suppress the influence of external
disturbances. Controlling the operation of a stirred tank heater. 2 Hours
5.2 cascade control, cascade control for a jacketed CSTR. 3 Hours 5.3 selective control, override control. 2 Hours 5.4 feed forward control, practical aspects of the design of feed
forward control, feed forward- feedback control. Ratio control. 3 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICT306 DISCRETE-TIME SIGNAL PROCESSING
CATEGORY L T P CREDIT PCC 3 1 0 4
Preamble:
Technologies such as microprocessors, microcontrollers and digital signal processors have become so advanced that they have had a dramatic impact on the disciplines of electronics engineering, computer engineering, instrumentation and control engineering and biomedical engineering. Technologists need to become familiar with digital signals and systems, basic digital signal processing techniques and digital filtering techniques. The objective of this course is to introduce students to the fundamental principles of these subjects and to provide a working knowledge such that they can apply digital signal processing in their engineering careers.
Prerequisite:
Students are expected to have knowledge in the subject signals and systems.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Explain the concepts of sampling on continuous and discrete time signals.
CO 2 Apply DFT properties on discrete time signals and systems and Compute DFT using direct computation and FFT methods.
CO 3 Construct structures of FIR and IIR filters.
CO 4 Design IIRfilters.
CO 5 Design FIR filters.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 2 3 CO 2 3 2 3 CO 3 3 2 3 CO 4 3 2 3 CO 5 3 2 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
INSTRUMENTATION AND CONTROL ENGINEERING
Remember Understand 10 10 20 Apply 40 40 80 Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Explain the effects of under sampling. (3 marks)
2. A signal x(n) is obtained by sampling analog signal x(t) at twice the Nyquist rate. If we wish to down sample x(n) by a factor 4, obtain the bandwidth of the decimation filter required for supressing aliasing distortion. (3 marks)
3. Explain sampling process. (14 marks)
Course Outcome 2 (CO2):
1. Show that, if x[n] is a real and even sequence, then its DFT X[k] is also real and even.
(3 marks)
2. State any three properties of DFT. (3 marks)
3. (a) Find the 8-point DFT of the sequence x(n) = 1,2,3,4,4,3,2,1 using DITFFT radix 2 algorithm. (8 marks)
INSTRUMENTATION AND CONTROL ENGINEERING
(b) How will you obtain linear convolution from circular convolution? For x(n) =1, 2, 3 and h(n) = −1,−2, obtain linear convolution x(n) ∗ h(n) using circular convolution. (6 marks)
Course Outcome 3 (CO3):
1. What is meant by product quantization error in digital signal processing? (3 marks)
2. Obtain the transposed direct form II structure for the system
y( n ) = 0.5y(n − l) − 0.25y(n − 2) + x(n) + x(n − 1) (3 marks)
3. Realize the system given by difference equation y( n ) = −0.1y(n − 1) + 0.2y(n − 2) + 3x(n) + 3.6x(n − 1) + 0.6x(n − 2) in cascade form. Obtain the parallel form realization for above system. (14 marks)
Course Outcome 4 (CO4):
1. Derive the equation for cutoff frequency in Butterworth filter. (3 marks)
2. Derive the equation for transformation of H(s) to H(z) using impulse invariance method. (3 marks)
3. Design a Butterworth filter using bilinear transformation for the following specifications (Assume T=1sec). (14 marks)
0.707 ≤ 𝐻𝐻𝑒𝑒𝑗𝑗𝑗𝑗 ≤ 1 0 ≤ |𝑗𝑗| ≤ 0.5𝜋𝜋
𝐻𝐻𝑒𝑒𝑗𝑗𝑗𝑗 ≤ 0.2 34𝜋𝜋 ≤ |𝑗𝑗| ≤ 𝜋𝜋
Course Outcome 5 (CO5):
1. Explain the significance of linear phase FIR filter and comment on its impulse response.
(3 marks)
2. Determine the frequency response of FIR filter defined by
y(n) = 0.25x(n) + x(n − 1) + 0.25x(n − 2) (3 marks)
3. Design an ideal FIR high pass filter with frequency response. (14 marks)
𝐻𝐻𝑑𝑑(𝑗𝑗) =1 𝑓𝑓𝑓𝑓𝑓𝑓
𝜋𝜋4≤ |𝑗𝑗| ≤ 𝜋𝜋
0 𝑓𝑓𝑓𝑓𝑓𝑓 |𝑗𝑗| ≤𝜋𝜋4
Find the value of h(n) for N=11.
INSTRUMENTATION AND CONTROL ENGINEERING
Model Question paper
Course Code: ICT306
Course Name:DISCRETE-TIME SIGNAL PROCESSING
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Explain aliasing.2. Consider a signal 𝑥𝑥(𝑛𝑛) = (1
2)𝑛𝑛u(n). Obtain the signal with decimation factor 3.
3. Find the circular convolution of 𝑥𝑥1(𝑛𝑛) = 1,2,3,4𝑎𝑎𝑛𝑛𝑑𝑑 𝑥𝑥2(𝑛𝑛) = 2,1,2.4. Given 𝑥𝑥(𝑛𝑛) = 1,−2,3,−4,5,−6.without calculating DFT
find𝑋𝑋(0),𝑋𝑋(3)𝑎𝑎𝑛𝑛𝑑𝑑∑ 𝑋𝑋(𝐾𝐾)5𝐾𝐾=0 .
5. Draw the cascade form structure for a discrete time sequence described by:1 + 1
2𝑧𝑧−1
1 − 34𝑧𝑧−1 + 1
8𝑧𝑧−2
6. Realize the system function using minimum number of multipliers𝐻𝐻(𝑧𝑧) = (1 + 𝑧𝑧−1)(1 + 0.5𝑧𝑧−1 + 0.5𝑧𝑧−2 + 𝑧𝑧−3)
7. Compute H(z) using bilinear transformation to 𝐻𝐻(𝑆𝑆) = 2(𝑠𝑠+1)(𝑠𝑠+2)
with T=1sec.
8. What is warping effect in bilinear transformation method and how can we eliminateit?
9. A second order linear phase FIR filter has a zero at z = ½. Obtain the magnitudeandphase response of the filter.
10. Find the response of the signal x(n) = 2Cos(π2
)n when applied to an FIR filter withimpulse response h(n) = 1,3,1.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. Explain the process of sampling with frequency domain representations.12. (a) What is down sampling? Explain with example. (7 marks)
(b) State and prove sampling theorem. (7 marks)
Module 2
INSTRUMENTATION AND CONTROL ENGINEERING
13. Find 8-point DFT of 𝑥𝑥[𝑛𝑛] = 2,1,−1,3,5,2,4 using radix 2 decimation in time FFTalgorithm.
14. (a) Compute the linear convolution of finite duration sequences𝑥𝑥[𝑛𝑛] = 1,2,−1,3,2,−3,−2,−1 𝑎𝑎𝑛𝑛𝑑𝑑 ℎ[𝑛𝑛] = 3,2 using graphical circularconvolution method. Confirm the result using matrix method.
(10 marks) (b) Find the number of complex multiplications involved in the calculation of a 1024-point DFT using direct computation and radix-2 FFT algorithm. (4 marks)
Module 3
15. (a) Find the lattice structure implementation of FIR filter ℎ[𝑛𝑛] = 1,0.5,075,−0.6.(7 marks)
(b) Draw the direct form II structure and transposed direct form II structure of
𝐻𝐻(𝑧𝑧) = 1+0.5𝑧𝑧−1−0.75𝑧𝑧−2
1+0.6𝑧𝑧−1+0.4𝑧𝑧−2−0.2𝑧𝑧−3 (7 marks)
16. Implement the all pass filter 𝐻𝐻𝛼𝛼𝛼𝛼 = −0.512+0.64𝑧𝑧−1−0.8𝑧𝑧−2+𝑧𝑧−3
1−0.8𝑧𝑧−1+0.64𝑧𝑧−2−0.512𝑧𝑧−3 , using a lattice filter structure. Sketch the structure.
Module 4
17. Design a Butterworth filter using bilinear transformation for the following
specifications
0.8 ≤ 𝐻𝐻𝑒𝑒𝑗𝑗𝑗𝑗 ≤ 1 0 ≤ |𝑗𝑗| ≤ 0.2𝜋𝜋
𝐻𝐻𝑒𝑒𝑗𝑗𝑗𝑗 ≤ 2 0.6𝜋𝜋 ≤ |𝑗𝑗| ≤ 𝜋𝜋
18. Using impulse invariance method determine H(z) for the analog filter transfer
function 𝐻𝐻(𝑆𝑆) = 2(𝑆𝑆+1)(𝑆𝑆+2)
. Assume T=1sec.
Module 5
19. For the following specification, design a linear phase FIR filter
0.99 ≤ 𝐻𝐻𝑒𝑒𝑗𝑗𝑗𝑗 ≤ 1.01 0 ≤ |𝑗𝑗| ≤ 0.3𝜋𝜋
𝐻𝐻𝑒𝑒𝑗𝑗𝑗𝑗 ≤ 0.01 0.35𝜋𝜋 ≤ |𝑗𝑗| ≤ 𝜋𝜋
20. Design an ideal low pass filter with frequency response𝐻𝐻𝑒𝑒𝑗𝑗𝑗𝑗 = 1 𝑓𝑓𝑓𝑓𝑓𝑓 − 0.5𝜋𝜋 ≤ 𝑗𝑗 ≤ 0.5, and 𝐻𝐻𝑒𝑒𝑗𝑗𝑗𝑗 = 0 𝑓𝑓𝑓𝑓𝑓𝑓 0.5𝜋𝜋 ≤ |𝑗𝑗| ≤ 𝜋𝜋. Find ℎ(𝑛𝑛 )for N=11. (use rectangular window)
INSTRUMENTATION AND CONTROL ENGINEERING
Module 1 (8 Hours)
SAMPLING
Sampling Theorem - Definition and proof of sampling theorem for band-limited signals. Effect of Under sampling: Aliasing. Sampling of Discrete Time Signals – Impulse train sampling – Discrete time Decimation and Interpolation (Up sampling and down sampling).
Module 2 (10 Hours)
DISCRETE FOURIER TRANSFORM
Frequency domain sampling and reconstruction of Discrete time signals -DFT- properties of
DFT. Circular convolution - Dentition, Linear convolution using DFT.
Frequency analysis of signals using DFT -Computation of DFT - Direct computation of DFT – DFT as linear Transformation – Fast Fourier Transform (Radix – 2 FFT only) – Decimationin time and decimation in frequency algorithms.
Module 3 (9 Hours)
DIGITAL FILTER STRUCTURES
Z-Transform representation of FIR and IIR filters FIR filter structures: - Direct form, Cascadeform and Lattice structures IIR filter structure: Direct form Transpose form, Cascade formand Parallel form structures.
FINITE WORD LENGTH EFFECTS
Quantization noise, Round off effects, Limit cycle oscillations.
Module 4 (9 Hours)
IIR DIGITAL FILTER DESIGN
Digital Filter Specifications – Design of IIR digital filters from analog filters – Butterworth and Chebyshev filters – Low pass, High pass, Band pass and band stop Filters – scaling the digital transfer function – impulse invariant method, bilinear transformation method – spectral transformation of IIR filters.
Module 5 (9 Hours)
FIR FILTER DESIGN
Syllabus DISCRETE-TIME SIGNAL PROCESSINGINSTRUMENTATION AND CONTROL ENGINEERING
Linear phase characteristics – basic concepts of group delay- Design of FIR filters: Estimation of filter order - FIR filter design - windowed Fourier series method Impulse response of ideal filters - Gibbs Phenomenon – Fixed window functions – Rectangular, Hamming, Blackman – Adjustable window function – Kaiser window.
Text Books
1. Oppenhiem and Schafer, “Discrete Time Signal Processing”, Pearson EducationIndia, 3/e.
2. Sanjit K Mitra, “Digital Signal Processing”, McGraw Hill Education, 4/e.
3. Proakis and Manolakis, “Digital Signal Processing Principles, Algorithms andApplications”.Pearson Education India, 4/e.
4. Li Tan, “Digital Signal Processing Fundamentals and Applications”, Elsevier,2/e.
5. Chassaing, “Digital signal processing and architecture with the C6713 and C6416DSK”, Wiley Interscience.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 MODULE I: SAMPLING: (8 Hours)
1.1 Sampling Theorem - Definition and proof of sampling theorem for band-limited signals. Effect of Under sampling: Aliasing. Sampling of Discrete Time Signals – Impulse train sampling
5 Hours
1.2 Discrete time Decimation and Interpolation (Up sampling and down sampling)
3 Hours
2 MODULE II: DISCRETE FOURIER TRANSFORM: (10 Hours)
2.1 Frequency domain sampling and reconstruction of Discrete time signals -DFT- properties of DFT. Circular convolution - Dentition, Linear convolution using DFT.
4 Hours
2.2 Frequency analysis of signals using DFT -Computation of DFT - Direct computation of DFT – DFT as linear Transformation – Fast Fourier Transform (Radix – 2 FFT only) – Decimation in time and decimation in frequency algorithms
6 Hours
3 MODULE III: (9 Hours)
3.1 DIGITAL FILTER STRUCTURES:
Z-Transform representation of FIR and IIR filtersFIR filterstructures: - Direct form, Cascade form and Lattice structuresIIR filter structure: Direct form Transpose form, Cascade form
6 Hour
INSTRUMENTATION AND CONTROL ENGINEERING
and Parallel form structures 3.2 FINITE WORD LENGTH EFFECTS:
Quantization noise, Round off effects, Limit cycle oscillations
3 Hours
4 MODULE IV: IIR DIGITAL FILTER DESIGN (9 Hours)
4.1 Digital Filter Specifications – Design of IIR digital filters from analog filters – Butterworth and Chebyshev filters – Low pass, High pass, Band pass and band stop Filters – scaling the digital transfer function – impulse invariant method, bilinear transformation method – spectral transformation of IIR filters.
9 Hours
5 MODULE V: FIR FILTER DESIGN(9 Hours) 5.1 Linear phase characteristics – basic concepts of group delay-
Design of FIR filters: Estimation of filter order - FIR filter design - windowed Fourier series method Impulse response of ideal filters - Gibbs Phenomenon – Fixed window functions – Rectangular, Hamming, Blackman – Adjustable window function – Kaiser window.
9 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICT308 COMPREHENSIVE COURSE WORK
Category L T P Credit Year of Introduction
PCC 1 0 0 1 2019
Preamble:The course is designed to ensure that the students have firmly grasped the fundamental knowledge in Instrumentation and Control Engineering familiar enough with the technological concepts. It provides an opportunity for the studentsto demonstrate their knowledge in various Instrumentation and Control Engineering subjects.
Pre-requisite:Nil
Course outcomes:After the course, the student will able to:
CO1 Learn to prepare for a competitive examination
CO2 Comprehend the questions in Instrumentation and Control Engineering field and answer them with confidence
CO3 Communicate effectively with faculty in scholarly environments
CO4 Analyze the comprehensive knowledge gained in basic courses in the field of Instrumentation and Control Engineering
PO1
PO2
PO3
PO4
PO5
PO6
PO7
PO8
PO9
PO10
PO11
PO12
PSO1
PSO2
PSO3
PSO 4
CO1 3 1 1 2
CO2 3 1 2 3 1 1 1 1
CO3 3 1 1 2 3
CO4 3 3 1 2 1 1 1 1
Assessment pattern
Bloom’s Category
End Semester Examination
(Marks) Remember 25 Understand 15 Apply 5 Analyze 5 Evaluate
INSTRUMENTATION AND CONTROL ENGINEERING

Create
End Semester Examination Pattern:
A written examination will be conducted by theUniversity atthe end of the sixth semester.The written examination will be of objective type similar to the GATE examination.Syllabus for the comprehensive examination isbased on following five Instrumentation and Control Engineeringcore courses.
ICT 201- Basics of Instrumentation Engineering and Transducer
ICT 203- Design of Logic Circuits
ICT 202- Measurements and Instrumentation
ICT 206- Control Engineering I
ICT 307–Signals and Systems
The written test will be of 50 marks with 50 multiple choice questions (10 questions from each module) with 4 choices of 1 mark each covering all the five core courses. There will be no negative marking. The pass minimum for this course is 25. The course should be mapped with a faculty and classes shall be arranged for practicing questions based on the core courses listed above. Written examination : 50marks Total : 50 marks Course Level Assessment and Sample Questions: 1) A measure of the reproducibility of the measurement value is known as
a) Accuracy b) Precision c) Sensitivity d) Drift
2) Error due to the external condition of the measuring devices is a) Gross error b) Random error c) Environmental error d) Observational error
3) From the below sets, which one belong to active transducers a) RTD
INSTRUMENTATION AND CONTROL ENGINEERING
b) Thermistor c) Bimetallic strip d) Quartz
4) An SR latch is implemented using TTL gates as shown in the figure. The set and reset pulse inputs are provided using the push-button switches. It is observed that the circuit fails to work as desired. The SR latch can be made functional by changing
(a) NOR gates to NAND gates (b) Inverters to buffers (c) NOR gates to NAND gates and inverters to buffers (d) 5 V to ground
5) A 2-bit binary multiplier can be implemented using (a) 2 input AND gates only. (b) 2 number of 2 input XOR gates and 6 number of 2 input AND gates. (c) Two 2-input NOR gates and one XNOR gate. (d) XOR gates and shift registers.
6) 11001, 1001 and 111001 correspond to the 2's complement representation of which one of the following sets of numbers (a) 25, 9 and 57 respectively (b) -6, -6 and -6 respectively (c) -7, -7 and -7 respectively (d) -25, -9 and -57 respectively
7) Which one of the following is an eigen function of the class of all continuous-time, linear, timeinvariant systems (u(t) denotes the unit-step function)? (a) ejω0tu(t) (b) cos(ω0t) (c) ejω0t (d) sin(ω0t)
8) If the signal x(t)=sin(t)πt*sin(t)πt with * ; denoting the convolution operation, then x(t) is equal to (a) sin(t)/πt (b) sin(2t)/2πt (c) 2sin(t)/πt (d) (sin(t)/πt)2
9) A stable linear time invariant (LTI) system has a transfer function H(s)=1/s2+s−6. To make this system causal it needs to be cascaded with another LTI system having a transfer function H1(s). A correct choice for H1(s) among the following options is
(a) s +3
(b) s − 2
(c) s − 6
INSTRUMENTATION AND CONTROL ENGINEERING
(d) s +1
10) What will be the nature of time response if the roots of the characteristic equation are located on the s-plane imaginary axis?
a) Oscillations b) Damped oscillations c) No oscillations d) Under damped oscilaations
11) Consider a system with transfer function G(s) = s+6/Ks2+s+6. Its damping ratio will be 0.5 when the values of k is:
a) 2/6 b) 3 c) 1/6 d) 6
12) The unit step response of a second order system is = 1-e-5t-5te-5t . Consider the following statements: 1. The under damped natural frequency is 5 rad/s. 2. The damping ratio is 1. 3. The impulse response is 25te-5t. Which of the statements given above are correct? a) Only 1 and 2 b) Only 2 and 3 c) Only 1 and 3 d) 1,2 and 3
13)For measurements on high voltage capacitors, the suitable bridge is
a)Wein Bridge b)Wheatstone bridge c) Schering bridge d) None of the above 14) Which of the following device can be used for force measurement? a) Beams b) Bellows c) Capsule d) Bourdon tube 15) An ohmmeter is a a) Moving Iron Instrument b) Moving Coil Instrument c) Dynamometer instrument d) None of the above
INSTRUMENTATION AND CONTROL ENGINEERING
Course Code: ICT 308
Comprehensive Course Work
MODULE 1:BASICS OF INSTRUMENTATION ENGINEERING AND TRANSDUCER
Functional elements of a measurement system, Classification of instruments, Standards and calibration, Measurement system performance. Static calibration, static characteristics. Types of inputs, Scale range and span, reproducibility and drift,Repeatability,Noise, Signal to noise ratio,, Johnson noise,Power spectrum density. Accuracy and precision, Static sensitivity, Linearity, Hysteresis,Threshold, Dead time, Dead zone, Resolution and discrimination, Loading effects, Errors, Transducers, variable resistance transducers, Potentiometers,Strain gauges. Piezoelectric Transducers,Hall effect transducers, variable inductive,Transducers, LVDT and RVDT, variable capacitance transducers, LDR MODULE 2: DESIGN OF LOGIC CIRCUITS
Number Systems, Binary codes, Boolean Algebra:Operations, Laws & Theorems, De Morgan’s theorems-SOP & POS Booleanexpressions and truth tables-, Minimization Techniques:Algebraic, Karnaugh map (up to 5 variables) & Quine-McCluskey methods-Realization usingbasic gates and universal gates,Combinational Logic Circuits &Design:Adders& Subtractors, Ripple carry & Carry look ahead adders,BCD adder. Code converters, Comparators. Multiplexers, Demultiplexers, Decoders & Encoders, Sequential Logic circuits & Design: Latches, Flip- Flops, Shift Registers, Counters, Logic families:TTL& CMOS
MODULE 3: MEASUREMENTS AND INSTRUMENTATION
Bridges: Wheatstone, Kelvin, Megohm, Maxwell, Anderson and Schering for measurement of R, L, C and frequency, Q-meter. Wattmeters: Dynamometer typewattmeter, Principles and torque equation; Measurement of single phase and three phase power; true RMS meter, instrument transformers,; oscilloscope, Digital methods of frequency, phase, time and period measurements; Digital voltmeter, measurement of force and torque, linear and angular measurements,Fluid properties: density, surface tension, capillarity and viscosity; Newton’s law of viscosity,Pascal’s law,Basic equations of fluid flow; continuity, momentum and energy equations; Bernoulli’s equations.
MODULE 4: CONTROL ENGINEERING
Feedback principles, signal flow graphs, transient response, time domain analysis of first and second order systems, steady-state-errors, Bode plot, phase and gain margins, Routh and Nyquist criteria, root loci, design of lead, lag and lead-lag compensators, state-space representation of systems; time-delay systems
MODULE 5: SIGNALS AND SYSTEMS
INSTRUMENTATION AND CONTROL ENGINEERING
Signal classification and representation,System Representation and Classification,Impulse response of continuous LTI system, Unit sample response of discrete LTI Systems ,Convolution Sum and Integral, Fourier Representation of Continuous Time Signals, Fourier Representation of Discrete Time Signals, Laplace transform, Z transform.
INSTRUMENTATION AND CONTROL ENGINEERING
ICL332 INDUSTRIAL INSTRUMENTATION LAB CATEGORY L T P CREDIT PCC 0 0 3 2
Preamble:
The lab is designed in order to get the students familiarized with the industrial instrumentation and to learn to design and set up a industrial instrument based on the given requirements.
Prerequisite:
Students are expected to study the topics covered in the theory class like transducers, basic instrumentation and analog electronics before coming to the respective lab experiment.
Course Outcomes:After the completion of the course the student will be able to
CO 1 Design of thermometers with different sensors and interfacing this with computer.
CO 2 Measure viscosity, speed and level, and calibration of pressure gauge.
CO 3 Analysis of dynamic response of second order system and control valve characteristics.
CO 4 Measure distance, range, and acceleration.
CO 5 Demonstrate skills in technical communication and teamwork.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10
PO 11
PO 12
CO 1 3 3 3 CO 2 3 3 CO 3 3 3 CO 4 3 3 CO 5 3
Assessment Pattern
Mark distribution
Total Marks CIE ESE ESE Duration
150 75 75 2.5 hours
INSTRUMENTATION AND CONTROL ENGINEERING
Attendance : 15 marks Continuous Assessment : 30 marks Internal Test (Immediately before the second series test) : 30 marks
End Semester Examination Pattern:The following guidelines should be followed regarding award of marks (a) Preliminary work : 15Marks (b) Implementing the work/Conducting the experiment : 10 Marks (c) Performance, result and inference (usage of equipments and trouble shooting) : 25 Marks (d) Viva voce : 20 marks (e) Record : 5 Marks
General instructions: Practical examination to be conducted immediately after the second series test covering entire syllabus given below. Evaluation is a serious process that is to be conducted under the equal responsibility of both the internal and external examiners. The number of candidates evaluated per day should not exceed 20. Students shall be allowed for the University examination only on submitting the duly certified record. The external examiner shall endorse the record.
LIST OF EXPERIMENTS
(Minimum of 12 experiments mandatory)
1. Design a thermometer using platinum RTD as sensor with the followingspecification.
Temp range: - -2000c to +2000c Output Voltage: - -2Volt to 2Volt
Also interface the thermometer with computer using any data acquisition system
(preferably NI DAQ and LabView software) (mandatory experiment)
2. Design and implement a thermometer (temperature sensing instrument) usingsolid state temperature sensing device as the sensor.
3. Design a thermometer using NTC thermistor as the sensor.
4. Design a Thermometer using thermocouple as sensor and interface this withcomputer using NI data acquisition system.
5. Measurement of temperature using Optical Pyrometer.
6. Measurement of Viscosity using red wood viscometer.
7. Measurement of Viscosity using rotational viscometer.
8. Calibration of bourdon pressure gauge using Dead weight pressure gauge tester.
9. Measurement of level using Capacitive transducer.
10. Measurement of speed using Cup anemometer.
Continuous Internal Evaluation Pattern: INSTRUMENTATION AND CONTROL ENGINEERING
11. Analysis of dynamic response of second order system.
12. Design and implementation of signal conditioning circuit for conductivity sensor.
13. Control valve inherent flow characteristics (with and without positioner)
14. Study the characteristics of elements of final control operation.
15. Study the transmitter characteristics of level, flow, temperature, and pressure
16. Study the characteristics of IR range sensor.
17. Study the principle of operation of a gyroscope.
18. Study the principles of operation of a sonic range finder.
Text Books
1. Johnuart A Alloca and Allen St, “Transducer theory and applications”, Reston Pub Co.
2. John Bentley, “Principles of Measurement Systems”, Prentice Hall, 4/e.
3. Harry N. Norton, “Handbook of Transducers”, Prentice Hall.
INSTRUMENTATION AND CONTROL ENGINEERING
CODE COURSE NAME CATEGORY L T P CREDIT
ICD 334 MINIPROJECT PWS 0 0 3 2
Preamble: This course is designed for enabling the students to apply the knowledge to address the real-world situations/problems and find solutions. The course is also intended to estimate the ability of the students in transforming theoretical knowledge studied as part of the curriculum so far in to a working model. The students are expected to design and develop a software/hardware project to innovatively solve a real-world problem.
Prerequisites: Subjects studied up to sixth semester.
Course Outcomes: After the completion of the course the student will be able to
CO No.
Course Outcome (CO) Bloom's Category Level
CO 1 Make use of acquired knowledge within the selected area of technology for project development. Level 3: Apply
CO 2 Identify, discuss and justify the technical aspects and design aspects of the project with a systematic approach. Level 3: Apply
CO 3 Interpret, improve and refine technical aspects for engineering projects. Level 3: Apply
CO 4 To exercise their creative and innovative qualities in a group project environment Level 3: Apply
CO 5 Report effectively the project related activities and findings. Level 2: Understand
Mapping of course outcomes with program outcomes
POs COs
PO 1
PO 2
PO 3
PO 4
PO 5
PO 6
PO 7
PO 8
PO 9
PO 10
PO 11
PO 12
CO 1 3 3 3 3 3 3 3 3 - - - 3 CO 2 3 3 3 3 3 - 2 3 - 3 2 3 CO 3 3 3 3 3 3 2 3 3 - 2 3 3 CO 4 3 3 2 2 - - - 3 3 3 3 3 CO 5 3 - - - 2 - - 3 2 3 2 3
Assessment Pattern
The End Semester Evaluation (ESE) will be conducted as an internal evaluation based on the product/project, the report and a viva- voce examination, conducted by a 3-member committee appointed by Head of the Department comprising HoD or a senior faculty member, academic coordinator for that program and project guide/coordinator. The Committee will be evaluating the level of completion and demonstration of functionality/specifications, presentation, oral examination, working knowledge and involvement.
INSTRUMENTATION AND CONTROL ENGINEERING
The Continuous Internal Evaluation (CIE) is conducted by evaluating the progress of the mini project through minimum of TWO reviews. At the time of the 1st review, students are supposed to propose a new system/design/idea, after a thorough literature study of the existing systems under the chosen area. In the 2nd review students are expected to highlight the implementation details of the proposed solution. The review committee should assess the extent to which the implementation reflects the proposed design. The final CIE mark is the average of 1st and 2nd review marks.
A zeroth review may be conducted before the beginning of the project to give a chance for the students to present their area of interest or problem domain or conduct open brain storming sessions for innovative ideas. Zeroth review will not be a part of the CIE evaluation process.
In the final review students are expected to demonstrate the product with its full specification along with a final report. A well coded, assembled and completely functional product is the expected output during the end of the semester.
Marks Distribution
Total Marks CIE ESE
150 75 75
Continuous Internal Evaluation Pattern: Attendance : 10 marks Marks awarded by Guide : 15 marks Project Report : 10 marks Evaluation by the Committee : 40 Marks End Semester Examination Pattern: The following guidelines should be followed regarding award of marks. (a) Demonstration : 50 Marks (b) Project report : 10 Marks (d) Viva voce : 15marks
Course Plan
In this course, each group consisting of three/four members is expected to design and develop a moderately complex software/hardware system with practical applications. This should be a working model. The basic concept of product design may be taken into consideration.
Students should identify a topic of interest in consultation with Faculty-in-charge of miniproject/Advisor. Review the literature and gather information pertaining to the chosen topic. State the objectives and develop a methodology to achieve the objectives. Carryout the design/fabrication or develop codes/programs to achieve the objectives. Demonstrate the novelty of the project through the results and outputs. The progress of the mini project is evaluated based on a minimum of two reviews.
INSTRUMENTATION AND CONTROL ENGINEERING
The review committee may be constituted by the Head of the Department. A project report is required at the end of the semester. The product has to be demonstrated for its full design specifications. Innovative design concepts, reliability considerations, aesthetics/ergonomic aspects taken care of in the project shall be given due weight.
INSTRUMENTATION AND CONTROL ENGINEERING

SEMESTER VI PROGRAM ELECTIVE I
INSTRUMENTATION AND CONTROL ENGINEERING
ICT312 NONLINEAR DYNAMICS AND CHAOS CATEGORY L T P CREDIT PEC 2 1 0 3
Preamble:
The aim of the Nonlinear Dynamics and Chaos course is to enable the students to analyse different types of nonlinear dynamics.
Prerequisite:
Differential equations and Control Engineering.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Analyse thecharacteristics of dynamics represented by flows on the line.
CO 2 Analyse the characteristics of dynamics represented by flows on the circle.
CO 3 Analyse the characteristics of dynamics represented by two dimensional flows.
CO 4 Analyse the characteristics of chaos.
CO 5 Analyse the characteristics of difference equations represented by one-dimensional maps.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 3 3 3 3 CO 2 3 3 3 3 3 CO 3 3 3 3 3 3 CO 4 3 3 3 3 3 CO 5 3 3 3 3 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 15 15 30 Apply 35 35 70 Analyse Evaluate Create
INSTRUMENTATION AND CONTROL ENGINEERING
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. An experimental study confirmed that the equation 𝑚𝑚𝑣 = 𝑚𝑚𝑚𝑚 − 𝑘𝑘𝑣𝑣2 gives a good quantitative fit to data on human skydivers. Six men were dropped from altitude varying from 10600 feet to 31400 feet to a terminal altitude of 2100 feet, at which they opened their parachute. The long free fall from 31400 to 2100 feet took 116 seconds. The average weight of the men and their equipment was 261.2 pounds. In these units, 𝑚𝑚 = 32.2𝑓𝑓𝑓𝑓 𝑠𝑠𝑠𝑠𝑠𝑠2⁄ . Compute the average velocity 𝑉𝑉𝑎𝑎𝑣𝑣𝑚𝑚 .
Course Outcome 2 (CO2):
1. Suppose that the overdamped pendulum is connected to a torsional spring. As the pendulum rotates, the spring winds up and generates an opposing torque −𝑘𝑘𝑘𝑘. Then the equation of motion becomes 𝑏𝑏𝑘𝑘 + 𝑚𝑚𝑚𝑚𝑚𝑚 sin𝑘𝑘 = 𝑇𝑇 − 𝑘𝑘𝑘𝑘 (assume suitable values if required). (a) Does this equation give a well-defined vector field on the circle? (b) Nondimensionalise the equation. (c) What does the pendulum do in the long run? (d) Show that many bifurcations occur as k is varied from 0 to ∞. What kind of
bifurcations are they?
Course Outcome 3 (CO3):
1. Consider the equation 𝑥 + 𝜇𝜇(|𝑥𝑥| − 1)𝑥 + 𝑥𝑥 = 0. Find the approximate period of the limit cycle for 𝜇𝜇 ≫ 1.
INSTRUMENTATION AND CONTROL ENGINEERING
Course Outcome 4 (CO4):
1. Consider the system
𝑥 = −𝑉𝑉𝑥𝑥 + 𝑧𝑧𝑧𝑧
𝑧 = −𝑉𝑉𝑧𝑧 + (𝑧𝑧 − 𝑎𝑎)𝑥𝑥
𝑧 = 1 − 𝑥𝑥𝑧𝑧
where a, V > 0 are parameters.
(a) Show that the system is dissipative.
(b) Show that the fixed points may be written in parametric form as 𝑥𝑥∗ = ±𝑘𝑘,𝑧𝑧∗ =
±𝐾𝐾−1,𝑍𝑍∗ = 𝑉𝑉𝐾𝐾2 where 𝑉𝑉(𝐾𝐾2 − 𝐾𝐾−2) = 𝑎𝑎. Classify the fixed points.
Course Outcome 5 (CO5):
1. Analyse the long-term behaviour of the map 𝑥𝑥𝑛𝑛+1 = 𝑟𝑟𝑥𝑥𝑛𝑛1+𝑥𝑥𝑛𝑛2
, where r > 0. Find and classify all fixed points as a function of r. Can there be periodic solutions? Chaos?
Model Question paper
Course Code: ICT312
Course Name:NONLINEAR DYNAMICS AND CHAOS
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. What is known as trajectory? Explain.2. Define an equilibrium. Find all fixed points for 𝑥 = 𝑥𝑥2 − 1 and classify their stability.3. Explain bifurcations and bifurcation points.4. Discuss about nonuniform oscillators.5. Define existence and uniqueness theorem.6. Explain Poincare-Bendixson theorem.7. Explain Transcritical and Pitchfork bifurcation.8. Explain the simple properties of theLorenz equations.9. Explain periodic windows.10. ExplainLyapunov exponent.
PART B
INSTRUMENTATION AND CONTROL ENGINEERING
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. A particle travel on the half-line 𝑥𝑥 ≥ 0 with a velocity given by𝑥 = −𝑥𝑥𝑠𝑠 where c is real and constant. (a) Find all values of C such that the origin x=0 is a stable fixed point. (6) (b) Now assume that C is chosen such that x=0 is stable. Can the particle ever reach
the origin in a finite time? Specifically, how long does it take for the particle to travel from x=1 to x=0, as a function of C? (8)
12. An experimental study confirmed that the equation 𝑚𝑚𝑣 = 𝑚𝑚𝑚𝑚 − 𝑘𝑘𝑣𝑣2 gives a good quantitative fit to data on human skydivers. Six men were dropped from altitude varying from 10600 feet to 31400 feet to a terminal altitude of 2100 feet, at which they opened their parachute. The long free fall from 31400 to 2100 feet took 116 seconds. The average weight of the men and their equipment was 261.2 pounds. In these units, 𝑚𝑚 = 32.2𝑓𝑓𝑓𝑓 𝑠𝑠𝑠𝑠𝑠𝑠2⁄ . Compute the average velocity 𝑉𝑉𝑎𝑎𝑣𝑣𝑚𝑚 .
Module 2
13. Sketch all the qualitatively different vector fields that occur as r is varied. Show that a pitchfork bifurcation occurs at a critical value of r (to be determined) and classify the bifurcation as supercritical or subcritical. Final sketch the bifurcation diagram of 𝑥𝑥∗ vs r.
𝑥 = 𝑥𝑥 +𝑟𝑟𝑥𝑥
1 + 𝑥𝑥2
14. Suppose that the overdamped pendulum is connected to a torsional spring. As the pendulum rotates, the spring winds up and generates an opposing torque −𝑘𝑘𝑘𝑘. Then the equation of motion becomes𝑏𝑏𝑘𝑘 + 𝑚𝑚𝑚𝑚𝑚𝑚 sin𝑘𝑘 = 𝑇𝑇 − 𝑘𝑘𝑘𝑘 (assume suitable values if required). (e) Does this equation give a well-defined vector field on the circle? (2) (f) Nondimensionalise the equation. (4) (g) What does the pendulum do in the long run? (2) (h) Show that many bifurcations occur as k is varied from 0 to ∞. What kind of
bifurcations are they? (6)
Module 3
15. A particle moves along a line joining two stationary masses𝑚𝑚1 and 𝑚𝑚2 which are separated by a fixed distance a. Let x denote the distance of the particle from 𝑚𝑚1. (a) Show that 𝑥 = 𝐺𝐺𝑚𝑚2
(𝑥𝑥−𝑎𝑎)2 −𝐺𝐺𝑚𝑚1𝑥𝑥2 where G is the gravitational constant. (7)
(b) Find the particle’s equilibrium position. Is it stable or unstable? (7) 16. Consider the equation𝑥 + 𝜇𝜇(|𝑥𝑥| − 1)𝑥 + 𝑥𝑥 = 0.Find the approximate period of the
limit cycle for 𝜇𝜇 ≫ 1.
Module 4
INSTRUMENTATION AND CONTROL ENGINEERING
17. Consider the damped Durffing oscillator 𝑥 + 𝜇𝜇𝑥𝑥 − 𝑥𝑥3 = 0.
(a) Show that the origin changes from a stable to an unstable spiral as 𝜇𝜇 decreases
through zero. (7)
(b) Plot the phase portraits for 𝜇𝜇 > 0, 𝜇𝜇 = 0, and 𝜇𝜇 < 0, and show that the bifurcation
at 𝜇𝜇 = 0 is a degenerate version of the Hopf bifurcation. (7)
18. Consider the system
𝑥 = −𝑉𝑉𝑥𝑥 + 𝑧𝑧𝑧𝑧
𝑧 = −𝑉𝑉𝑧𝑧 + (𝑧𝑧 − 𝑎𝑎)𝑥𝑥
𝑧 = 1 − 𝑥𝑥𝑧𝑧
where a, V > 0 are parameters.
(c) Show that the system is dissipative. (6)
(d) Show that the fixed points may be written in parametric form as 𝑥𝑥∗ = ±𝑘𝑘,𝑧𝑧∗ =
±𝐾𝐾−1,𝑍𝑍∗ = 𝑉𝑉𝐾𝐾2 where 𝑉𝑉(𝐾𝐾2 − 𝐾𝐾−2) = 𝑎𝑎. Classify the fixed points. (8)
Module 5
19. Let 𝑥𝑥𝑛𝑛+1 = 𝑓𝑓(𝑥𝑥𝑛𝑛) where 𝑓𝑓(𝑥𝑥) = −(1 + 𝑟𝑟)𝑥𝑥 − 𝑥𝑥2 − 2𝑥𝑥3.
(a) Classify the linear stability of the fixed point 𝑥𝑥∗ = 0. (6)
(b) Show that a flip bifurcation occurs at 𝑥𝑥∗ = 0 when r = 0. (8)
20. Analyse the long-term behaviour of the map 𝑥𝑥𝑛𝑛+1 = 𝑟𝑟𝑥𝑥𝑛𝑛1+𝑥𝑥𝑛𝑛2
, where r > 0. Find and
classify all fixed points as a function of r. Can there be periodic solutions? Chaos?
Syllabus
NONLINEAR DYNAMICS AND CHAOS
Module 1 (6 Hours)
Introduction
Chaos, Fractals and Dynamics – History of Dynamics – Nonlinear systems.
One-dimensional Flows
Flows on the line- Introduction – Geometric way of thinking – Fixed points and stability – Linear stability analysis – Existence and Uniqueness – Potentials.
Module 2 (7 Hours)
INSTRUMENTATION AND CONTROL ENGINEERING
Bifurcations
Introduction – Saddle – Node Bifurcation – Transcritical bifurcation –Pitchfork Bifurcation – Imperfect Bifurcations and catastrophes.
Flows on the circle
Introduction – Uniform Oscillator - Non Uniform Oscillator.
Module 3 (8 Hours)
Two Dimensional Flows
Linear Systems – Introduction – Classification of Linear systems.
Two Dimensional Flows
Phase plane – Introduction – Phase portraits – Existence, Uniqueness and Topological Consequences - Fixed Points and linearization.
Two Dimensional Flows
Limit Cycles– Introduction - Ruling out Closed Orbits – Poicare`-Bendixon Theorem
Module 4 (8 Hours)
Two Dimensional Flows
Bifurcations – Introduction – Saddle-Node, Transcritical and pitchfork Bifurcations - Hopf bifurcations.
Chaos
Lorenz Equations – Introduction – Simple properties of Lorenz Equations - Chaos on a Strange Attractor – Lorenz Map.
Module 5 (6 Hours)
Chaos: One Dimensional Maps
Introduction –Fixed points and Cobwebs - Logistic Map:Numerics- Logistic Map:Analysis – Periodic windows – Liapunov Exponents.
Text Books
INSTRUMENTATION AND CONTROL ENGINEERING
1. Steven H. Strogatz, “Nonlinear Dynamics and Chaos with applications to Physics,Biology, Chemistry and Engineering”, Westview Press, 1994.
Reference Books
1. John Hogan, Alan Champneys, Bernd Krauskopf, Mario di Bernardo, Eddie Wilson,Hinke Osinga, and Martin Homer, “Nonlinear Dynamics and Chaos”, IOP.
2. Stephen Wiggins, “Introduction to Applied Nonlinear Dynamical Systems andChaos”, Springer.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Module 1
1.1 Introduction: Chaos, Fractals and Dynamics – History of Dynamics – Nonlinear systems.
1 Hour
1.2 One-dimensional Flows: Flows on the line- Introduction – Geometric way of thinking – Fixed points and stability – Linear stability analysis – Existence and Uniqueness – Potentials.
5 Hours
2 Module 2
2.1 Bifurcations – Introduction – Saddle – Node Bifurcation – Transcritical bifurcation –Pitchfork Bifurcation – Imperfect Bifurcations and catastrophes.
5 Hours
2.2 Flows on the circle - Introduction – Uniform Oscillator - Non-Uniform Oscillator.
2 Hours
3 Module 3
3.1 Two Dimensional Flows: Linear Systems – Introduction – Classification of Linear systems.
2 Hours
3.2 Two Dimensional Flows: Phase plane – Introduction – Phase portraits – Existence, Uniqueness and Topological Consequences - Fixed Points and linearization.
4 Hours
3.3 Two Dimensional Flows: Limit Cycles– Introduction - Ruling out Closed Orbits – Poicare`-Bendixon Theorem.
2 Hours
4 Module 4
4.1 Two Dimensional Flows: Bifurcations – Introduction – Saddle-Node, Transcritical and pitchfork Bifurcations - Hopf bifurcations.
4 Hours
4.2 Chaos: Lorenz Equations – Introduction – Simple properties of Lorenz Equations - Chaos on a Strange Attractor – Lorenz Map.
4 Hours
5 Module 5 5.1 Chaos: One Dimensional Maps – Introduction –Fixed points and 6 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
Cobwebs - Logistic Map:Numerics- Logistic Map:Analysis – Periodic windows – Liapunov Exponents.
INSTRUMENTATION AND CONTROL ENGINEERING
ICT322 VIRTUAL INSTRUMENTATION CATEGORY L T P CREDIT PEC 2 1 0 3
Preamble:
The aim of the virtual instrumentationcourse is to make thestudents to obtain the knowledge of virtual instrumentation and some of its application. Virtual instrumentation combines mainstream commercial technologies, such as the PC, withflexible software and a wide variety of measurement hardware, so one can create user-defined virtual instrument systems that meet their exact application needs in instrumentation and control engineering field.
Prerequisite:
Course on basic electronics, electrical, instrumentation, op amps is required.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Define virtual instrumentation concepts and Compare traditional and virtual instrumentation.
CO 2 Study the basic building blocks of virtual instrumentation, usage of loops and arrays using LabVIEW.
CO 3 Study the usage of clusters and graphical indicators.
CO 4 Study the usage of structures, string operations and file operations.
CO 5 Design a Virtual Instrument.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 3 3 CO 2 3 3 3 CO 3 3 3 3 CO 4 3 3 3 CO 5 3 3 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember 10 10 20
INSTRUMENTATION AND CONTROL ENGINEERING
Understand 20 20 40 Apply 20 20 40 Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks *One assignment should be a miniproject.
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Differentiate virtual instrument and traditional instrument.
2. Differentiate graphical programming and textual programming.
Course Outcome 2 (CO2):
1. Write a note on global variables and local variables.
2. Explain polymorphism
Course Outcome 3 (CO3):
1. Explain the advantages of clusters over arrays.
2. Differentiate between XY graph and XY charts.
Course Outcome 4 (CO4):
1. Write a note on timed structures.
INSTRUMENTATION AND CONTROL ENGINEERING
2. Write a note onLabVIEW mathscript.
Course Outcome 5 (CO5):
1. Design a Virtual Instrument to measure temperature in real time (mini project).
Model Question paper
Course Code: ICT322
Course Name:VIRTUAL INSTRUMENTATION
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Define Virtual instrumentation. List any four merits of virtual instrumentation.2. What is the use of Icon / connector pane?3. Create a VI for converting Celsius to Fahrenheit.4. Explain the difference between while loop for loop.5. Distinguish Chart and graph.6. Define clusters. What is the use of clusters?7. Explain (1) Timed structures and (2) Event structures.8. Explain (1) Formula Node and (2) Mathscript node.9. Explain about DAQ Card and Point out the components of DAQ Cards.10. Explain GPIB and Mention any two uses of GPIB.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. (a) With a neat diagram explain the layers of virtual instrumentation software and thesoftware and hardware role. (7 Marks) (b) Explain controls and indicators in LabVIEW. (7 Marks)
12. (a) Discuss Virtual Instrumentation for Test, Control and Design. (5 Marks) (b) With figure, explain Graphical System Design Model. (5 Marks) (c) With Palettes, explain Front panel and Block diagram windows in LabVIEW.
(4 Marks)
Module 2
INSTRUMENTATION AND CONTROL ENGINEERING
13. Write in detail about loops and charts. Explain them with an example. Explain in detail about local variables with examples.
14. (a) Define Module. Explain Modular Programming in LabVIEW. (7 Marks) (b) Explain arrays, array creation and array functions. (7 Marks)
Module 3
15. Explain clusters, cluster functions, controls, and monitors. 16. Explain about the shift registers and feedback nodes with neat block diagram.
Module 4
17. Illustrate the operation of shift register showing the front panel and block diagram to
find the current count, previous count, count two iterations ago and count three
iterations ago and explain.
18. Develop a VI to check if a number is positive or negative. If yes, then the VI should
calculate and display the square root. Otherwise it should display a message and give
a value of -9999.00 as output. Solve using (1) case structure (2) select function and
(3) formula node.
Module 5
19. Explain the program architecture of GPIB code for devices simulator using
conventional VI’s with respect to that of VISA.
20. How VISA software interfaces permit the use of instruments under GPIB?
Syllabus
VIRTUAL INSTRUMENTATION
Module 1 (7 Hours)
Graphical system design
Graphical system design (GSD) model-design flow with GSD-virtual instrumentation-virtual instrument and traditional instrument-hardware and software in virtual instrumentation-virtual instrumentation for test, control and design-virtual instrumentation in the engineering process-virtual instruments beyond personal computer- graphical system design using LabVIEW-graphical programming and textual programming.
Introduction to LabVIEW
advantages of LabVIEW- software environment-creating and saving a vi -front panel toolbar- block diagram toolbar-palettes -shortcut menus - property dialog boxes - front panel controls
INSTRUMENTATION AND CONTROL ENGINEERING
and indicators- block diagram-data types -data flow program-LabVIEW documentation resources - keyboard shortcuts
Module 2 (8 Hours)
Modular programming
modular programming in LabVIEW - build a vi front panel and block diagram-icon and connector pane - creating an icon - building a connector pane- displaying subVIs and express vis as icons or expandable nodes - creating subVIs from sections of a vi - opening and editing subVIs - placing subVIs on block diagrams- saving subVIs - creating a stand-alone application.
Repetition and loops
For loops - while loops - structure tunnels- terminals inside or outside loops - shift registers-feedback nodes- control timing- communicating among multiple loops - local variables - global variables
Arrays
arrays in LabVIEW - creating one-dimensional array controls, indicators and constants - creating two-dimensional arrays-creating multidimensional arrays- initializing arrays - deleting elements, rows, columns and pages within arrays- inserting elements, rows, columns and pages into - replacing elements, rows, columns, and pages within arrays- array functions - auto indexing - creating two-dimensional arrays using loops - identification of data structure (scalar and array) using wires - using auto-indexing to set the for loop count - matrix operations with arrays-polymorphism.
Module 3 (6 Hours)
Clusters
Creating cluster controls and indicators- creating cluster constant - order of cluster elements - cluster operations - assembling clusters- disassembling clusters - conversion between arrays and clusters - error handling- error cluster.
Plotting data
types of waveforms - waveform graphs-waveform charts-waveform data type- XY graphs-intensity graphs and charts-digital waveform graphs-3d graphs - customizing graphs and charts-customizing graphs-customizing 3d graphs - customizing charts-dynamically formatting waveform graphs -configuring a graph or chart - displaying special planes on the XY graph.
INSTRUMENTATION AND CONTROL ENGINEERING
Module 4 (7 Hours)
Structures
Case structures-sequence structures-customizing structures- timed structures- formula nodes - event structure - LabVIEW mathscript.
Strings and file i/o
Creating string controls and indicators - string functions-editing, formatting and parsing strings - formatting strings - configuring string controls and indicators- basics of file input/output - choosing a file I/O format - LabVIEW data directory - file i/o VIs - creating a relative path.
Module 5 (7 Hours)
Instrument Control
Introduction - GPIB communication - hardware specifications - software architecture - instrument i/o assistant – visa- instrument - serial port communications - data transfer rate - serial port standards - using other interfaces.
Data acquisition
Transducers - signals- signal conditioning- DAQ hardware configuration - DAQ hardware - analog inputs - analog outputs - counters - digital I/O (DIO) – DAQ software architecture- DAQ assistant- channels and task configuration - selecting and configuring a data acquisition device- components of computer based measurement system
Text Books
1. Jovitha Jerome, “Virtual Instrumentation using LabVIEW”, PHI Learning Pvt. Ltd, New Delhi.
2. Robert H. Bishop, “Learning with Lab-view”, Pearson, 2015.
3. S.Sumathi&P.Surekha, “LabVIEW based Advanced Instrumentation”, Springer, 2007.
Reference Books
1. Sanjay Gupta, Joseph John, “Virtual Instrumentation using LabVIEW”, McGraw Hill Education, 2/e.
INSTRUMENTATION AND CONTROL ENGINEERING
2. Gary W. Johnson, Richard Jennings, “LabVIEW Graphical Programming”, McGrawHill Education, 4/e.
3. Gary Johnson, “Labview Graphical Programming”, McGraw-Hill Education, 4/e.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Graphical system design- (3 Hours)
1.1 Graphical system design (GSD) model-design flow with GSD- 1 Hour
1.2 Virtual instrumentation-virtual instrument and traditional instrument-hardware and software in virtual instrumentation-
1 Hour
1.3 Virtual instrumentation for test, control and design-virtual instrumentation in the engineering process-virtual instruments beyond personal computer- graphical system design using LabVIEW-graphical programming and textual programming.
1 Hour
Introduction to LabVIEW (4 Hours) 1.4 advantages of LabVIEW- software environment-creating and
saving a vi - 2 Hours
1.5 front panel toolbar- block diagram toolbar-palettes -shortcut menus - property dialog boxes - front panel controls and indicators- block diagram-data types -data flow program-LabVIEW documentation resources - keyboard shortcuts
2 Hours
2 Modular programming (2 Hrs) 2.1 modular programming in LabVIEW - build a vi front panel and
block diagram-icon and connector pane - creating an icon - building a connector pane- displaying subVIs and express vis as icons or expandable nodes -
1 Hour
2.2 Creating subVIs from sections of a vi - opening and editing subVIs - placing subVIs on block diagrams- saving subVIs - creating a stand-alone application.
1 Hour
Repetition and loops (3 Hrs) 2.3 for loops - while loops - structure tunnels- terminals inside or
outside loops - 2 Hours
2.4 shift registers-feedback nodes- control timing- communicating among multiple loops - local variables - global variables
1 Hour
Arrays(3 Hrs) 2.5 arrays in LabVIEW - creating one-dimensional array controls, 2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
indicatorsand constants - creating two-dimensional arrays-creating multidimensional arrays- initializing arrays - deleting elements, rows, columns and pages within arrays- inserting elements, rows, columns and pages into - replacing elements, rows, columns, and pageswithin arrays- array functions - auto indexing -
2.6 Creating two-dimensional arrays using loops - identification of data structure (scalar and array)using wires - using auto-indexing to set the for-loop count - matrix operations with arrays-polymorphism.
1 Hour
3 Clusters (3 Hours) 3.1 creating cluster controls and indicators- creating cluster constant
- order of cluster elements - cluster operations - 1 Hour
3.2 Assembling clusters- disassembling clusters - conversion between arrays and clusters - error handling- error cluster.
2 Hours
Plotting data (3 Hours) 3.3 types of waveforms - waveform graphs-waveform charts-
waveform data type- XY graphs-intensity graphs and charts-digital waveform graphs-
2 Hours
3.4 3d graphs - customizing graphs and charts-customizing graphs-customizing 3d graphs - customizing charts-dynamically formatting waveform graphs -configuring a graph or chart - displaying special planes on the XY graph.
1Hour
4 Structures (3 Hours) 4.1 case structures-sequence structures-customizing structures- 1 Hour 4.2 Timed structures- formula nodes - event structure - LabVIEW
mathscript. 2 Hours
Strings and file i/o (4 Hours) 4.3 - creating string controls and indicators - string functions-
editing, formatting and parsing strings - formatting strings - configuring string controls and indicators-
2 Hours
4.4 Basics of file input/output - choosing a file I/O format - LabVIEW data directory - file i/o VIs - creating a relative path.
2 Hours
5 Instrument Control (3 Hours)
5.1 introduction - GPIB communication - hardware specifications - software architecture - instrument i/o assistant –
1 Hour
5.2 Visa- instrument - serial port communications - data transfer rate - serial port standards - using other interfaces.
2 Hours
Data acquisition (4 Hours)
INSTRUMENTATION AND CONTROL ENGINEERING
5.3 Transducers - signals- signal conditioning- DAQ hardware configuration - DAQ hardware - analog inputs - analog outputs -
2 Hours
5.4 counters - digital I/O (DIO) – DAQ software architecture- DAQ assistant- channels and task configuration -
1 Hour
5.5 selecting and configuring a data acquisition device- components of computer-based measurement system
1 Hour
INSTRUMENTATION AND CONTROL ENGINEERING
ICT332 SOFT COMPUTING CATEGORY L T P CREDIT PEC 2 1 0 3
Preamble:
The aim of the Soft Computing course is to make the student familiarized with the basics of the neural network, fuzzy logic and genetic algorithm which are considered to be providing new solutions in various fields including instrumentation, automation, process control etc..
Prerequisite:
A strong knowledge in basics of engineering mathematics, critical thinking and problem solving skills and familiarity with algorithmic approaches desirable.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Explainthe fundamental theory and concepts of neural networks.
CO 2 Identify different neural network architectures and algorithms.
CO 3 Explainand study the concepts of recurring neural network and radial based function neural network.
CO 4 Explainthe concepts of fuzzy sets, knowledge representation using fuzzyrules, approximate reasoning, fuzzy inference systems, and fuzzy logic.
CO 5 Explain the basics of an evolutionary computing paradigm known as genetic algorithms and hybrid soft-computing technique.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 3 CO 2 3 3 CO 3 3 3 CO 4 3 3 CO 5 3 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember 10 10 20 Understand 20 20 40
INSTRUMENTATION AND CONTROL ENGINEERING
Apply 20 20 40 Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks *One assignment may be a mini project
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Differentiate supervisory and non-supervisory learning.
2. Characteristics of artificial neural network.
Course Outcome 2 (CO2):
1. Explain single layer perceptron neural network.
2. Explain multilayer layer perceptron neural network.
Course Outcome 3 (CO3):
1. Explain the radial based function neural network.
2. Differentiate MLPNN and Recurring NN.
Course Outcome 4 (CO4):
1. List out the advantages and disadvantages of fuzzy logic system.
INSTRUMENTATION AND CONTROL ENGINEERING
2. Explain crisp set and fuzzy set.
Course Outcome 5 (CO5):
1. Explain Genetic algorithm.
2. Explain neuro fuzzy hybrid soft computing technique.
Model Question paper
Course Code: ICT332
Course Name:SOFT COMPUTING
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Describe the different activation functions used in ANN.2. Differentiate supervised learning and unsupervised learning.3. What are the characteristics of neural networks and elements that constitute neural
networks?4. Explain single layered perceptron neural network.5. Distinguish between Recurrent network and multi-layered perceptron neural network.6. Compare RBF and MLP networks.7. What is fuzzification?8. What is the difference between crispest and fuzzy set?9. Mention the role of fitness function in GA and what are the requirements of GA.10. State the different selection methods in GA.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. Explain different types of Learning rules used in neural network with necessaryequations.
12. Discuss about pattern association, pattern recognition, function approximation usingneural network.
Module 2
INSTRUMENTATION AND CONTROL ENGINEERING
13. Explain the algorithm of Back Propagation algorithm with necessary equations and drawing.
14. Explain how XOR problem is resolved using perceptron model.
Module 3
15. (a) Explain in detail about Botlzman machine and its learning rule. 10 marks (b) Explain cross validation 4 marks
16. Explain in detail about Mean Field Theory (MFT) machine and its learning algorithm.
Module 4
17. (a) Explain in detail about Sugeno fuzzy model with suitable example and its relative
merits and demerits. 10marks
(b) Write a note on defuzzification technique . 4 marks
18. (a) Explain different types of membership functions used in fuzzification process.
10 marks
(b) Explain canonical rule form. 4 marks
Module 5
19. Explain the working concept of genetic algorithm for constraint optimization problem
with suitable example.
20. Write short notes on (a) Neuro-fuzzy system (b) Neuro-genetic system.
Syllabus
SOFT COMPUTING
Module 1 (7 Hours)
Introduction to Artificial Intelligence Systems
Neural networks – Fuzzy logic – Genetic algorithms – Hybrid systems.
Introduction to Artificial Neural Networks
Biological neurons – McCulloch and Pitt models of neurons – Types of activation functions – Neural network architecture – single layer feedforward network – multilayer feedforward network – recurrent networks – Characteristics of neural networks.
Learning Process
supervised learning- unsupervised learning -Learning rules-–Perceptron learning rule - Widrow-Hoff learning rule - Delta learning rule - -Hebbian learning – competitive learning –
INSTRUMENTATION AND CONTROL ENGINEERING
learning tasks – pattern association – pattern recognition – function approximation – control – filtering – beamforming – memory – adaptation – statistical nature of the learning process – bias – statistical learning theory – vc dimension.
Module 2 (7 Hours)
Single Layer Networks
Single layer perceptrons – adaptive filtering problem – unconstrained optimization techniques – learning curves – perceptron – perceptron convergence theorem – linearly separable and non-linearly separable pattern – ADALINE.
Multilayer Network
Multilayer perceptron – some preliminaries – back propagation algorithm – the two passes of computation – activation function – rate of learning – XOR problem – output representation and decision rule – virtues and limitations of back propagation algorithm – MADALINE.
Module 3 (7 Hours)
Radial Basis Neural Networks
Exact interpolation – radial basis function networks – network training – regularization theory – noisy interpolation theory – relation to kernel regression – RBF network for classification – Comparison of RBF and MLP networks.
Recurrent Neural Networks
Recurrent networks – Hopfield networks – energy function – spurious states – error performance – simulated annealing – the boltzman machine and boltzman learning rule (small discussion) – the mean field theory machine – MFT learning algorithm.
Cross Validation
cross validation – model selection – early stopping method of training – variants of cross validation.
Module 4 (8 Hours)
Fuzzy Logic
Fuzzy sets – properties – operations – fuzzy relations – operations on fuzzy relations – extension principle – fuzzy measures – membership function – fuzzification and defuzzification methods.
INSTRUMENTATION AND CONTROL ENGINEERING
Fuzzy Rule Based Systems
Canonical rule forms – decomposition of composite rules – likelihood and truth qualification – aggregation of fuzzy rules.
Module 5 (6 Hours)
Introduction to Genetic Algorithm
Natural evolution – properties – classification – GA features – coding – selection – reproduction – cross over and mutation – operators – basic GA and structure.
Introduction to Hybrid Systems
Concept of neuro-fuzzy and neuro-genetic systems.
Text Books
1. S.Rajasekaran&G.A.Vijayalakshmi Pai, “Neural Networks, Fuzzy Logic and GeneticAlgorithm (Synthesis and Application)”, Prentice Hall of India.
2. Simon Haykins, “Neural Networks (A Comprehensive Foundation)”, PearsonEducation.
3. Ross.T.J, “Fuzzy Logic with Engineering Applications”, Wiley, 4/e.
4. Christopher M. Bishop, “Neural Networks for Pattern Recognition”, Oxford.
Reference Books
1. Bart Kosko, “Neural Networks and Fuzzy Systems”, Prentice Hall of India.
2. Jacek M.Zurada, “Introduction to Artificial Neural Systems”, Jaico Publishing House.
3. David E.Goldberg, “Genetic Algorithms”, Pearson Education.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Introduction to Artificial Intelligence Systems
1.1 Neural networks – Fuzzy logic – Genetic algorithms – Hybrid systems.
1 Hour
Introduction to Artificial Neural Networks 1.2 Biological neurons – McCulloch and Pitt models of neurons –
Types of activation functions – Neural network architecture – single layer feedforward network – multilayer feedforward
1 Hour
INSTRUMENTATION AND CONTROL ENGINEERING
network – recurrent networks – Characteristics of neural networks.
Learning Process 1.3 Supervised learning- unsupervised learning. 1 Hour 1.4 Learning rules-–Perceptron learning rule - Widrow-Hoff
learning rule - Delta learning rule - -Hebbian learning – competitive learning.
2 Hours
1.5 Learning tasks – pattern association – pattern recognition – function approximation – control – filtering – beam forming – memory – adaptation – statistical nature of the learning process – bias – statistical learning theory – vc dimension.
2 Hours
2 Single Layer Networks
2.1 Single layer perceptrons – adaptive filtering problem – unconstrained optimization techniques –
1 Hour
2.2 Learning curves – perceptron – perceptron convergence theorem – linearly separable and non-linearly separable pattern – ADALINE.
2 Hours
Multilayer Network 2.3 Multilayer perceptron – some preliminaries – back propagation
algorithm – the two passes of computation – activation function – rate of learning –
2 Hours
2.4 XOR problem – output representation and decision rule – virtues and limitations of back propagation algorithm – MADALINE
2 Hours
3 Radial Basis Neural Networks
3.1 Exact interpolation – radial basis function networks – network training – regularization theory – noisy interpolation theory
1 Hour
3.2 Relation to kernel regression – RBF network for classification – Comparison of RBF and MLP networks.
2 Hours
Recurrent Neural Networks 3.3 Recurrent networks – Hopfield networks – energy function –
spurious states – error performance – simulated annealing. 2 Hours
3.4 The boltzman machine and boltzman learning rule (small discussion) – the mean field theory machine – MFT learning algorithm.
1 Hour
Cross Validation 3.5 Cross validation – model selection – early stopping method of
training – variants of cross validation. 1 Hour
4 Fuzzy Logic
INSTRUMENTATION AND CONTROL ENGINEERING
4.1 Fuzzy sets – properties – operations – fuzzy relations 1 Hour 4.2 operations on fuzzy relations – extension principle – fuzzy
measures – membership function 3 Hours
4.3 fuzzification and defuzzification methods. 2 Hours
Fuzzy Rule Based Systems 4.4 Canonical rule forms – decomposition of composite rules –
likelihood and truth qualification – aggregation of fuzzy rules. 2 Hours
5 Introduction to Genetic Algorithm 5.1 Natural evolution – properties – classification – GA features –
coding – selection – reproduction 2 Hours
5.2 Cross over and mutation – operators – basic GA and structure. 2 Hours
Introduction to Hybrid Systems 5.3 Concept of neuro-fuzzy and neuro-genetic systems. 2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICT342 ANALYTICAL INSTRUMENTATION CATEGORY L T P CREDIT PEC 2 1 0 3
Preamble:
The aim of the Analytical Instrumentation course is to understand the theory and operational principles of various instrumental methods for qualitative and quantitative evaluation by different types of spectroscopy, followed by the review of important methods in the analysis of industrial gases and also to impart fundamental knowledge on chromatography.
Prerequisite:
Fundamental knowledge in Electro Magnetic Spectrum.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Discuss the basic knowledge about analytical instruments, its concepts, and its technique.
CO 2 Explain the principle and operation of UV-Visible, IR and fluorescence spectroscopic analysis.
CO 3 Explain the basic principle and working of Photometry, Atomic Absorption, and ESR Spectrometer.
CO 4 Discuss on the Mass, NMR spectroscopy and different types of Gas Analysers.
CO 5 Explain the concept of different Chromatography techniques.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 2 CO 2 2 2 CO 3 3 3 CO 4 3 3 CO 5 2 3
INSTRUMENTATION AND CONTROL ENGINEERING
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember 6 6 12 Understand 44 44 88 Apply Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern: There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Define analytical instrumentation.
2. Explain the elements of Analytical Instruments.
3. Reveal the fundamental laws of Analytical Instrumentation.
4. Discuss the various elements in Absorption spectroscopy.
Course Outcome 2 (CO2):
1. Give a detailed account on UV- Visible spectroscopy, giving its industrialapplications.
2. What are colorimeters (photometers)?
3. Describe the principle of single and double beam filter photometer.
Assessment Pattern INSTRUMENTATION AND CONTROL ENGINEERING
4. Explain various sources and detectors used in IR spectroscopy.
5. Explain the theory of Raman spectroscopy.
6. With neat diagram explain the Laser based Raman spectrometer.
7. Discuss about spectroflurimeter.
8. With neat diagrams, explain the principle of working and applications of (i) spectroflurimeter and (2) Ratio Flourimetrer.
9. Discuss the working principle of single beam filter flourimeter and double beam filter flourimeter.
Course Outcome 3 (CO3):
1. What is the principle of flame spectrometer, and ESR spectroscopy?
2. Reveal the constructional details of the flame photometer.
3. Explain the working principle of atomic absorption spectroscopy.
4. Give the instrumentation for electron spectroscopy.
Course Outcome 4 (CO4):
1. List the components of Mass Spectrometer.
2. With neat sketch, explain the detailed operation of Mass spectrometer.
3. Write about inductively coupled plasma mass spectrometer.
4. What is the principle of NMR spectroscopy?
5. Discuss in Detail about Flue gas analysers.
6. What are the design considerations of pH meter?
7. Draw the functional diagram of paramagnetic oxygen analyser.
8. Explain the following.
a. Conductivity meters.
b. Dissolved oxygen meters.
c. Paramagnetic oxygen analysers.
d. Sodium analysers
9. CO analysers.
Course Outcome 5 (CO5):
1. Explain about retention time.
2. Discuss in detail about Gas Chromatography.
INSTRUMENTATION AND CONTROL ENGINEERING
3. Write a note on any two detectors in Gas Chromatography.
4. List basic parts of Gas chromatography.
5. Draw and explain block diagram of a Gas chromatography.
6. List detectors used in Gas chromatography.
7. Write a note on different types of columns in Gas Chromatography.
8. Differentiate gas chromatography and liquid chromatography.
9. Explain about sample injection system of GC.
10. Discuss about different parts of HPLC.
11. Explain the following with respect to chromatography.
a. Packed column and packing materials used.
b. Comparison of gas and liquid chromatography.
c. Various detectors used in Gas Liquid (GL) chromatography.
12. With neat diagrams, explain the high-pressure chromatography (HPLC). Write theadvantages of HPLC over other chromatographic techniques.
13. Explain the (i) rate theory and plate theory with respect to chromatography (ii) mobilephase delivery systems in HPLC (iii) eddy diffusion and its effects in bandbroadcasting in chromatographic columns.
Model Question paper
Course Code: ICT342
Course Name:ANALYTICAL INSTRUMENTATION
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Give the elements of an analytical instrument.2. Describe the electromagnetic spectrum.3. What are colorimeters (photometers)?4. Explain the theory of Raman spectroscopy.5. What is the principle of flame spectrometer?6. Explain the working principle of atomic absorption spectroscopy.
INSTRUMENTATION AND CONTROL ENGINEERING
7. List the components of Mass Spectrometer. 8. Reveal the principle of NMR spectroscopy. 9. Differentiate gas chromatography and liquid chromatography. 10. List detectors used in Gas chromatography.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. With neat schematic, discuss in detail about absorption spectroscopy. 12. (a) Describe the laws relating to absorption of radiation. (7)
(b) What are monochromators? Explain in detail. (7)
Module 2
13. Give a detailed account on UV- Visible spectroscopy, giving its industrial applications.
14. With neat diagrams, explain the principle of working and applications of (i) spectroflurimeter and (ii) Ratio Flourimeter.
Module 3
15. What is the principle of flame spectrometer? Discuss in detail about the constructional details of the flame photometer.
16. Explain the theory behind Atomic Absorption spectrometer and Electron Spin Resonance Spectrometers.
Module 4
17. With neat sketch, explain the detailed operation of Mass spectrometer.
18. Explain the following.
(i) Conductivity meters. (7)
(ii) Sodium analysers. (7)
Module 5
19. (a) Differentiate gas chromatography and liquid chromatography. (7)
(b) Discuss about different parts of HPLC. (7)
20. Discuss the principle, constructional details and applications of Gas Chromatography with neat diagrams.
INSTRUMENTATION AND CONTROL ENGINEERING
Syllabus
ANALYTICAL INSTRUMENTATION
Module 1 (6 Hours)
Fundamentals and Spectroscopy
Fundamentals of analytical instruments: Elements of an analytical instrument: PC based analytical instruments.
Fundamental laws of spectroscopy: electromagnetic spectrum, interaction of radiation with matter, laws of radiation: beer lambert law, deviation from beer lambert law.
Absorption spectroscopy: Absorption instruments – Radiation sources- Optical filters- Monochromators- Detectors. Examples of Absorption spectroscopy.
Module 2 (7 Hours)
UV-Vis, IR and fluorescence spectroscopy
UV and Visible Spectroscopy: Colorimeters/ photometers: Single beam and double beam filter photometer – Spectro photometers: Single beam and double beam spectrophotometers.
Infrared Spectrophotometers (NIR-Near IR): wave number, basic principle using diatomic harmonic structure, radiation sources, detectors. Fourier Transform Infrared Spectroscopy (FTIR). Raman spectroscopy: Raman Effect, basic principle, Raman spectrometer.
Fluorescence spectroscopy: Principle of fluorescence – Measurement of fluorescence – Single beam and double beam filter fluorimeter- Ratio fluorimeter. Spectro fluorimeters.
Module 3 (7 Hours)
Photometry, Atomic Absorption spectrometer, and ESR Spectrometer
Flame Photometry: Principle and constructional details of flame photometer- Emission system –Optical system – Detectors.
Atomic Absorption spectrometer: basic block diagram, atomizers, nebulizers, plasma excitation sources, radiation sources
Electron Spin Resonance Spectrometers (ESR): Electron spin resonance, basic ESR spectrometer, microwave bridge, Klystrone, modulation, sample cavities.
INSTRUMENTATION AND CONTROL ENGINEERING

Module 4 (8 Hours)
Mass, NMR spectroscopy and Gas Analysers
Molecular Mass spectrometry: Principle of operation, Magnetic deflection mass spectrometers, Components of a mass spectrometer.
Proton Nuclear Magnetic Resonance spectroscopy (NMR): Nuclear spin, resonance condition, relaxation condition, constructional details of NMR spectrometer, chemical shift, spin-spin coupling.
Industrial Gas analysers- pH meters- Conductivity meters - Dissolved oxygen meters- Sodium analyser – Gas analysers- Paramagnetic oxygen analyser – CO analysers – Flue gas analysers.
Module 5 (7 Hours)
Chromatography Chromatography: Chromatographic process – Classification- Terms in chromatography Gas chromatography: Block diagram, Principle, Constructional details, Column details, GC detector, katharometer, flame ionization detector, flame photometric detector, photo ionization detector, electro capture detector, argon ionization detector. Liquid Chromatography: Types of liquid chromatography (adsorption chromatography, partition chromatography, gel permeation chromatography, ion-exchange chromatography High pressure Liquid Chromatography (HPLC): Principle, Constructional details.
Text Books
1. R.S. Khandpur, “Handbook of Analytical Instruments”, Tata McGraw-Hill, 6/e.
2. Skoog.D.A, Holler.F.J and Niemann.T.A., “Principles of Instrumental Analysis”, Saunders, 1998.
Reference Books
1. Wiston.C, “X-ray Method”, John Wiley, 1991.
2. Ewing.G.W, “Instrumental Methods of Analysis”, McGraw-Hill, 1992.
3. Mann.CK., Vickers.T.J, and Gullick.W.H, “Instrumental Analysis”, Harper and Row Publications.
4. Robert.D. Braun, “Introduction to Instrumental Analysis”, McGraw-Hill.
INSTRUMENTATION AND CONTROL ENGINEERING
5. Frank.A.Settle, “Handbook of Instrumental Techniques for Analytical Chemistry”,Prentice Hall, 1997.
6. Willard, Merritt Dean and Settle, “Instrument Methods of Analysis”, East-west Press,1997.
7. S. Abirami& D. Vijayanandh, “Analytical Instruments”, Anuradha Publications.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Fundamentals and Spectroscopy (6 Hours)
1.1 Fundamentals of analytical instruments: Elements of an analytical instrument: PC based analytical instruments.
1 Hour
1.2 Fundamental laws of spectroscopy: electromagnetic spectrum, interaction of radiation with matter, laws of radiation: beer lambert law, deviation from beer lambert law.
2 Hours
1.3 Absorption spectroscopy: Absorption instruments – Radiation sources- Optical filters- Monochromators- Detectors. Examples of Absorption spectroscopy.
3 Hours
2 UV-Vis, IR and fluorescence spectroscopy (7 Hours)
2.1 UV and Visible Spectroscopy: Colorimeters/ photometers: Single beam and double beam filter photometer – Spectrophotometers: Single beam and double beam spectrophotometers.
2 Hours
2.2 Infrared Spectrophotometers (NIR-Near IR): wave number, basic principle using diatomic harmonic structure, radiation sources, detectors. Fourier Transform Infrared Spectroscopy (FTIR). Raman spectroscopy: Raman Effect, basic principle, Raman spectrometer.
3 Hours
2.3 Fluorescence spectroscopy: Principle of fluorescence – Measurement of fluorescence – Single beam and double beam filter fluorimeter- Ratio fluorimeter. Spectro fluorimeters.
2 Hours
3 Photometry, Atomic Absorption spectrometer, and ESR Spectrometer (7 Hours)
3.1 Flame Photometry: Principle and constructional details of flame photometer- Emission system –Optical system – Detectors.
2 Hours
3.2 Atomic Absorption spectrometer: basic block diagram, atomizers, nebulizers, plasma excitation sources, radiation sources.
2 Hours
3.3 Electron Spin Resonance Spectrometers (ESR): Electron spin resonance, basic ESR spectrometer, microwave bridge, Klystrone, modulation, sample cavities.
3 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
4 Mass, NMR spectroscopy and Gas Analysers (8 Hours)
4.1 Molecular Mass spectrometry: Principle of operation, Magnetic deflection mass spectrometers, Components of a mass spectrometer.
2 Hours
4.2 Proton Nuclear Magnetic Resonance spectroscopy (NMR): Nuclear spin, resonance condition, relaxation condition, constructional details of NMR spectrometer, chemical shift, spin-spin coupling.
3 Hours
4.3 Industrial Gas analysers- pH meters- Conductivity meters - Dissolved oxygen meters- Sodium analyser – Gas analysers- Paramagnetic oxygen analyser – CO analysers – Flue gas analysers.
3 Hours
5 Chromatography (7 Hours) 5.1 Chromatography: Chromatographic process – Classification- Terms in
chromatography. 1 Hour
5.2 Gas chromatography: Block diagram, Principle, Constructional details, Column details, GC detector, katharometer, flame ionization detector, flame photometric detector, photo ionization detector, electro capture detector, argon ionization detector.
3 Hours
5.3 Liquid Chromatography: Types of liquid chromatography (adsorption chromatography, partition chromatography, gel permeation chromatography, ion-exchange chromatography High pressure Liquid Chromatography (HPLC): Principle, Constructional details.
3 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICT352 NUMERICAL METHODS CATEGORY L T P CREDIT PEC 2 1 0 3
Preamble:
Aim of the course is to introduce the students about numerical techniques for the solution of non-linear systems, ordinary differential equations, and for interpolations.
Prerequisite:
Basic knowledge in algebra.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Solve nonlinear equations.
CO 2 Identify the unknown function from the given data set.
CO 3 Solve numerical differentiation and integration.
CO 4 Solve mathematical models represented by ordinary differential equations.
CO 5 Solve two dimensional Laplace equations.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 3 3 CO 2 3 2 3 3 CO 3 3 3 3 CO 4 3 3 3 CO 5 3 3 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 10 10 30 Apply 40 40 70 Analyse Evaluate Create
INSTRUMENTATION AND CONTROL ENGINEERING
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Solve for a positive root of 3 4 1 0x x− + = by Regula Falsi method.
2. Find a root between 0 and 1 of the transcendental function ( ) 3 sin( ) xf x x x e= + − using Secant method.
Course Outcome 2 (CO2):
1. Using the following table, apply Gauss’s forward central interpolation formula to get f (3.75).
x 2.5 3.0 3.5 4.0 4.5 5.0 f(x) 24.145 22.043 20.225 18.644 17.262 16.047
Course Outcome 3 (CO3):
1. Determine the value of y when x=0.1 given that y(0)=1 and y’=x2+y using modified Euler method.
Course Outcome 4 (CO4):
1. Applythe fourth order Runge-Kutta method to find y (0.2) given that y’=x+y,y(0)=1.
Course Outcome 5 (CO5):
1. SolveLaplace’s equation for the figure given below.
INSTRUMENTATION AND CONTROL ENGINEERING
Model Question paper
Course Code: ICT352
Course Name:NUMERICAL METHODS
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Write the algorithm to determine a root off (x) = 0, given xo reasonably close to theroot,using Newton’s method.
2. Suppose you are given with a function f(x) =0, Explain how to find out the roots ofthis equation using secant method.
3. Assume that we have a table of values (xi,yi),i=0,1,2.....n of any functiony=f(x),values of x being equally spaced. Write the central difference table for it.
4. Find the cubic polynomial which takes the following values: y(1)=24, y(3)=120,y(5)=336, y(7)=720.
5. Certain corresponding values of x and log10x are (300,2.4771), (304,2.4829),(305,2.4843) and (307,2.4871). Find log10301.
6. What are the properties of divided difference? Explain any two properties.7. Explain trapezoidal rule.8. Determine the value of y when x=0.1 given that y (0) =1 and y’=x2+y using modified
Euler method.9. What is predictor-corrector method? Explain.10. Explain SOR method.
PART B
INSTRUMENTATION AND CONTROL ENGINEERING
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. Solve for a positive root of 3 4 1 0x x− + = by Regula Falsi method. 12. Find a root between 0 and 1 of the transcendental function ( ) 3 sin( ) xf x x x e= + −
using Secant method.
Module 2
13. Using the following table, apply Gauss’s forward central interpolation formula to get f (3.75).
x 2.5 3.0 3.5 4.0 4.5 5.0 f(x) 24.145 22.043 20.225 18.644 17.262 16.047
14. If √12500=111.803399, √12510=111.848111, √12520=111.892805,
√12530=111.937483, find √12516 by Gauss’s backward formula.
Module 3
15. Using Langrange’s formula of interpolation find y(9.5) given.
x 7 8 9 10 y 3 1 1 9
16. From the following table find f(x) and hence f(6) using Newton’s general
interpolation formula.
x 1 2 7 8
f(x) 1 5 5 4
Module 4
17. Apply the fourth order Runge-Kutta method to find y(0.2) given that y’=x+y,y(0)=1.
18. Find the gradient of the road at the middle point of the elevation above a datum line of
seven points of road which are given below.
x 0 300 600 900 1200 1500 1800
y 135 149 157 183 201 205 193
Module 5
INSTRUMENTATION AND CONTROL ENGINEERING
19. Given 2 21 (1 )2
dy x ydx
= + and y(0)=1,y(0.1)=1.06,y(0.2)=1.12,y(0.3)=1.21,evaluate
y(0.4) by Milne’s predictor corrector method.
20. Solve Laplace’s equation for the figure given below.
Syllabus
NUMERICAL METHODS
Module 1 (7 Hours)
Introduction to Numerical analysis, distinction between analytical solution, steps to be followed for NA, interval halving or bisection method-Solution of nonlinear equations: Linear interpolation methods(secant method and false position method), newton’s method, relation between Newton’s methods with interpolation method. -Fixed point iteration, Muller’s method.
Module 2 (8 Hours)
Finite difference interpolation: finite differences, forward differences, backward differences, central differences. Newton’s forward difference interpolation formula, Newton’s backward difference interpolation formula. - Gauss forward central difference formula, Gauss backward central difference formula, Stirling’s formula.
Module 3 (6 Hours)
Lagrangian polynomial- Divided differences and their properties, Newton’s general interpolation formula- Interpolation with a cubic spline (case study).
Module 4 (7 Hours)
INSTRUMENTATION AND CONTROL ENGINEERING
Numerical differentiation: differential formula in the case of equally spaced points. Numerical integration: trapezoidal and Simpson’s rules. Numerical solution of ordinary differential equations: the Taylor series method, Euler and modified Euler method, Runge Kutta Methods (2nd and 4th order only).
Module 5 (7 Hours)
Numerical solution of ordinary differential equations: multi step methods, Milne’s predictor corrector formula, Adam- Bash forth and Adam -Moulton formula - Solution of boundary value problems in ordinary differential equations. - Finite difference methods for solving two dimensional Laplace’s equation for a rectangular region.
Text Books
1. Gerald.C.F, “Introduction to Numerical Analysis”, Addison Wesley.
2. S.S.Sastry, “Introductory Methods of Numerical Analysis”, Prentice Hall IndiaLearning Private Limited, 5/e.
Reference Books
1. Bikas Chandra Bhui& Dipak Chatterjee, “Numerical Methods and Programming”,Vikas Publishing House.
2. Froberg.C.V, “Introduction to Numerical Analysis”, Addison Wesley.
3. Hildebrand.F.B, “Introduction to Numerical Analysis”, Tata McGraw Hill.
4. James.M.L, Smith.C.M&Wolford.J.C, “Applied Numerical Methods for DigitalComputation”, Harper and Row Publications.
5. Mathew.J.H, “Numerical Methods Using Matlab”, Pearson, 4/e.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1.1 Introduction to Numerical analysis, distinction between
analytical solution, steps to be followed for NA 1 Hour
1.2 interval halving or bisection method-Solution of nonlinear equations: Linear interpolation methods(secant method and false position method), newton’s method, relation between Newton’s methods with interpolation method
2 Hours
1.3 Fixed point iteration, Muller’s method 2 Hours 1.4 Tutorial 2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
2.1 Finite difference interpolation: finite differences, forward differences, backward differences, central differences.
2 Hours
2.2 Newton’s forward difference interpolation formula, Newton’s backward difference
2 Hours
2.3 interpolation formula. - Gauss forward central difference formula, Gauss backward central difference formula, Stirling’s formula
2 Hours
2.4 Tutorial 2 Hours 3.1 Lagrangian polynomial- Divided differences and their properties 2 Hours 3.2 Newton’s general interpolation formula 2 Hours 3.3 Interpolation with a cubic spline (case study) 1 Hour 3.4 Tutorial 1 Hour 4.1 Numerical differentiation: differential formula in the case of
equally spaced points. 2 Hours
4.2 Numerical integration: trapezoidal and Simpson’s rules 1 Hour 4.3 Numerical solution of ordinary differential equations: the Taylor
series method, Euler and modified Euler method, Runge Kutta Methods (2nd and 4th order only)
2 Hours
4.4 Tutorial 2 Hours 5.1 Numerical solution of ordinary differential equations: multi step
methods, Milne’s predictor corrector formula, Adam- Bash forth and Adam -Moulton formula.
3 Hours
5.2 Solution of boundary value problems in ordinary differential equations. - Finite difference methods for solving two-dimensional Laplace’s equation for a rectangular region
2 Hours
5.3 Tutorial 2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
IC362 BIOMEDICAL INSTRUMENTATION CATEGORY L T P CREDIT PEC 2 1 0 3
Preamble:
Biomedical instrumentation is an application of biomedical engineering, which focuses on the devices and mechanics used to measure, evaluate, and treat biological systems. It focuses on the use of sensors and imaging modalities to monitor physiological characteristics of a human or animal. The course is designed to make the student acquire an adequate knowledge of the physiological systems of the human body and relate them to the parameters that have clinical importance. The fundamental principles of equipment that are actually in use at the present day are introduced.
Prerequisite:
Students are expected to have knowledge in the fundamentals of sensors and transducers, and linear integrated circuits.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Explain the origin of bioelectric potentials, and working of human nervous system, muscular system, cardiovascular system, and respiratory system, and describe the theory, construction and working of bio-electrodes.
CO 2 Explain the measurement of biomedical signals such as ECG, EEG and EMG, and explain working of isolations amplifiers.
CO 3 Describe the measurement of non-electric parameters of heart and lungs.
CO 4 Perceive the concepts of blood gas analysis, assistive & therapeutic equipment such as Pacemakers, defibrillators, ventilators, diathermy, Heart-Lung machine & dialyzers, and electrical safety in medical environment.
CO 5 Design bio amplifier and signal conditioning circuits for the measurement of physiological variables.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 2 3 CO 2 3 2 3 CO 3 3 2 3 CO 4 3 2 3 CO 5 3 2 2 2 3
INSTRUMENTATION AND CONTROL ENGINEERING
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 40 40 90 Apply 10 10 10 Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Define Absolute Refractory Period.
2. What are sensory nerves, motor nerves and association nerves?
3. Explain the theory and construction of micro, needle and surface electrodes.
Course Outcome 2 (CO2):
1. What are the electrodes used for EEG?
2. How does Einthoven triangle help to place electrodes for ECG measurement?
3. Explain the working of transformer coupled isolation amplifiers.
INSTRUMENTATION AND CONTROL ENGINEERING

Course Outcome 3 (CO3):
1. What is Korotkoff sound?
2. Discuss about the origin of heart sounds.
3. Explain the principle and working of body plethysmography.
Course Outcome 4 (CO4):
1. Describe the blood gas analyzer designed to measure pH, pCO2, pO2 from a sample.
2. Explain about micro and macro shocks.
3. What is leakage current in biomedical instruments?
4. Why AC is not preferred in defibrillators?
Course Outcome 5 (CO5):
1. What are the requirements of amplifiers used in biomedical recorders?
2. Design an ECG amplifier circuit with a gain of 500 and a band pass filter, that filterwill only pass the frequency band of 0.5 Hz to 50Hz of the ECG spectrum.
3. Calculate the common mode voltage for the circuit having a displacement current of0.3µA, averaging resistor of 20KΩ, feedback resistor of 3MΩ and the right legresistor is about 70KΩ.
Model Question paper
Course Code: ICT362
Course Name:BIOMEDICAL INSTRUMENTATION
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Define absolute refractory period and relative refractory period.2. Why Ag-AgCl electrode is used for Bio potential measurement?3. What is vectorcardiography?4. How EMG signal is used in rehabilitation?5. Write the principle of pulse rate measurement technique.6. What is the principle of body plethysmography?7. What is the application of defibrillator?
INSTRUMENTATION AND CONTROL ENGINEERING
8. What is the effect of leakage current in biomedical equipment? 9. What are the requirements of amplifiers used in biomedical recorders? 10. Discuss the applications of AC carrier amplifier.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. Explain the anatomy and physiology of human respiratory system with neat diagrams. 12. What is half-cell potential? Draw and explain the equivalent circuit when the surface
electrodes are placed on the skin for bio-potential measurement.
Module 2
13. How does Einthoven triangle help to place electrodes for ECG measurement? 14. Explain the characteristics of bio-signals in detail with examples.
Module 3
15. Explain the working of Sphygmomanometer with neat diagram. 16. How can ultrasound signals be used to measure blood flow? Explain with diagram.
Module 4
17. Explain the principle and working of different types of pacemakers.
18. Describe the blood gas analyzer designed to measure pH, pCO2, pO2 from a sample.
Module 5
19. Design an ECG amplifier circuit with a gain of 500 and a band pass filter, that filter
will only pass the frequency band of 0.5 Hz to 50Hz of the ECG spectrum.
20. Design a data recording system of automatic blood pressure measurement system. Include a suitable isolation system.
Syllabus
BIOMEDICAL INSTRUMENTATION
Module 1 (7 Hours)
BASIC ANATOMY AND PHYSIOLOGY
Origin of bio potential and its propagation, Nervous system, Muscular system, Cardiovascular system, Respiratory System.
INSTRUMENTATION AND CONTROL ENGINEERING
BIOPOTENTIAL ELECTRODES
Electrode-electrolyte interface, electrode–skin interface, half-cell potential, Contact impedance, polarization effects of electrode – non polarizable electrodes. Types of electrodes - surface, needle and micro electrodes and their equivalent circuits. Recording problems - motion artifacts, measurement with two electrodes.
Module 2 (6 Hours)
BIOPOTENTIAL MEASUREMENTS
Bio signals characteristics – frequency and amplitude ranges. ECG – Einthoven‘s triangle, standard 12 lead system, Principles of vector cardiography. EEG – 10-20 electrode system, unipolar, bipolar and average mode. EMG– unipolar and bipolar mode.
Module 3 (8 Hours)
MEASUREMENT OF NON-ELECTRICAL PARAMETERS
Temperatureand pulse rate measurements. Blood Pressure: indirect methods - Auscultatory method, oscillometric method, direct methods: electronic manometer, Pressure amplifiers, Systolic, diastolic, mean detector circuit. Blood flow and cardiac output measurement: Indicator dilution, thermal dilution and dye dilution method, Electromagnetic and ultrasound blood flow measurement. Pulmonary function measurements-Spirometer, Photo plethysmography, Body plethysmography.
Module 4 (7 Hours)
Blood Gas analyzers: pH of blood, Measurement of blood pCO2, pO2, finger-tip oximeter,
ESR and GSR measurements
ASSISTIVE AND THERAPEUTIC EQUIPMENTS:
Pacemakers, defibrillators, ventilators, diathermy, Heart-Lung machine and dialyzers.
ELECTRICAL SAFETY IN MEDICAL ENVIRONMENT: Physiological effects of electric current – shock hazards from electrical equipment –leakage current-Instruments for checking safety parameters of biomedical equipment. Methods of accident prevention.
Module 5 (7 Hours)
INSTRUMENTATION AND CONTROL ENGINEERING
SIGNAL CONDITIONING CIRCUITS
Need for bio-amplifier - single ended bio-amplifier, differential bio-amplifier, Impedance
matching circuit, Design of bio-amplifiers for the measurement of physiological variables.
Power line interference, Right leg driven ECG amplifier, Band pass filtering.
Working of isolation amplifiers, (transformer, capacitive and optical isolation), isolated DC amplifier and AC carrier amplifier.
Text Books
1. L. Cromwell, F. J. Weibell, and L. A. Pfeiffer, “Biomedical Instrumentation andMeasurements”, Pearson Education, Delhi.
2. John G Webster, “Medical Instrumentation Application and Design”, Wiley IndiaPrivate Limited, 5/e.
Reference Books
1. J. J. Carr and J. M. Brown, “Introduction to Biomedical Equipment Technology”,Pearson Education, 4/e.
2. R.S. Khandhpur, “Hand Book of Bio-Medical Instrumentation”, McGraw HillEducation, 3/e.
3. C. Rajarao and S.K. Guha, “Principles of Medical Electronics and Bio-medicalInstrumentation”, Universities press (India) Ltd, 2000.
4. L.A. Geddes and L.E.Baker, “Principles of Applied Bio-Medical Instrumentation”,Wiley-Blackwell, 3/e.
5. Robert. B. Northrop, “Analysis and Application of Analog Electronic Circuits toBiomedical Instrumentation”, CRC Press, 2/e.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 BASIC ANATOMY AND PHYSIOLOGY (3 Hours)
1.1 Origin of bio potential and its propagation, Nervous system, Muscular system, Cardiovascular system, Respiratory System. 3 Hours
BIOPOTENTIAL ELECTRODES (4 Hours)
1.2 Electrode-electrolyte interface, electrode–skin interface, half-cell potential, Contact impedance, polarization effects of electrode –
2 Hour
INSTRUMENTATION AND CONTROL ENGINEERING
non polarizable electrodes.
1.3 Types of electrodes - surface, needle and micro electrodes and their equivalent circuits. Recording problems - motion artifacts, measurement with two electrodes.
2 Hours
2 BIOPOTENTIAL MEASUREMENTS: (6 Hours)
2.1 Bio signals characteristics – frequency and amplitude ranges. ECG – Einthoven ‘s triangle, standard 12 lead system, Principles of vector cardiography
3 Hour
2.2 EEG – 10-20 electrode system, unipolar, bipolar and average mode.
1.5 Hours
2.3 EMG– unipolar and bipolar mode. 1.5 Hour 3 MEASUREMENT OF NON-ELECTRICAL PARAMETERS (8 Hours)
3.1 Temperature and pulse rate measurements 1 Hour 3.2 Blood Pressure: indirect methods - Auscultatory method,
oscillometric method, direct methods: electronic manometer, Pressure amplifiers, Systolic, diastolic, mean detector circuit.
2 Hours
3.3 Blood flow and cardiac output measurement: Indicator dilution, thermal dilution and dye dilution method, Electromagnetic and ultrasound blood flow measurement.
3 Hours
3.4 Pulmonary function measurements-Spirometer, Photo plethysmography, Body plethysmography.
2 Hours
4.1 Blood Gas analyzers: pH of blood, Measurement of blood pCO2, pO2, finger-tip oximeter, ESR and GSR measurements
2 Hours
ASSISTIVE AND THERAPEUTIC EQUIPMENTS (2 Hours) 4.2 Pacemakers, defibrillators, ventilators, diathermy, Heart-Lung
machine and dialyzers. 2 Hours
ELECTRICAL SAFETY IN MEDICAL ENVIRONMENT (3 Hours) 4.3 Shock hazards – leakage current-Instruments for checking safety
parameters of biomedical equipment. 3 Hours
5 SIGNAL CONDITIONING CIRCUITS (7 Hours) 5.1 Need for bio-amplifier - single ended bio-amplifier, differential
bio-amplifier, Impedance matching circuit, Design of bio-amplifiers for the measurement of physiological variables. Power line interference, Right leg driven ECG amplifier, Band pass filtering.
6 Hours
5.2 Working of isolation amplifiers (transformer, capacitive and optical isolation).
1 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICT372 TOTAL QUALITY MANAGEMENT CATEGORY L T P CREDIT PEC 2 1 0 3
Preamble:
The major aim of the course Total Quality Management is to understand the basic concepts of total quality management and reliability. The course is designed to learn the statistical tools for measuring quality, familiarize with benchmarking, quality function deployment, failure mode and effect analysis, ISO and certification process.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Study the concepts of total quality management.
CO 2 Study the importance of employee involvement and quality of service.
CO 3 Study the role of reliability and statistical tools for measuring quality.
CO 4 Identify the importance of continuous process improvement in quality, suppliers, benchmarking and quality function deployment.
CO 5 Identify the importance of total productive maintenance, failure mode and effect analysis, need for ISO systems.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 2 2 3 CO 2 2 3 CO 3 2 2 3 CO 4 2 3 CO 5 2 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 50 50 100 Apply Analyse Evaluate Create
INSTRUMENTATION AND CONTROL ENGINEERING
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Explain the importance of quality.
2. Describe the role of management in TQM.
3. What are the major dimensions of Quality?
4. Describe the importance of strategic planning in TQM.
Course Outcome 2 (CO2):
1. Describe the involvement of employees in TQM.
2. Explain why service quality is important.
3. Describe the importance of reward of in TQM.
4. How service quality affects satisfaction?
Course Outcome 3 (CO3):
1. Describe the importance of reliability.
2. Explain the role of standard deviation.
3. Describe why analysis is required about failure.
4. Explain the differences between sample and population.
Course Outcome 4 (CO4):
INSTRUMENTATION AND CONTROL ENGINEERING
1. Why continuous process improvement is required?
2. Describe how rating is possible for the suppliers.
3. Explain about 5S.
4. Describe the benefits of QFD process.
Course Outcome 5 (CO5):
1. Describe the concept of TPM.
2. Explain the need for ISO 9000.
3. What are the different stages of FMEA?
4. Describe the concept of ISO 14000.
Model Question paper
Course Code: ICT372
Course Name:TOTAL QUALITY MANAGEMENT
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Explain the importance of quality.2. Describe the role of management in TQM.3. Describe the involvement of employees in TQM.4. Explain why service quality is important.5. Describe the importance of reliability.6. Explain the role of standard deviation.7. Why continuous process improvement is required?8. Describe how rating is possible for the suppliers.9. Describe the concept of TPM.10. Explain the need for ISO 9000.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. What are the major dimensions of Quality?
INSTRUMENTATION AND CONTROL ENGINEERING
12. Describe the importance of strategic planning in TQM.
Module 2
13. Describe the importance of reward of in TQM.14. How service quality affects satisfaction?
Module 3
15. Describe why analysis is required about failure.16. Explain the differences between sample and population.
Module 4
17. Explain about 5S.
18. Describe the benefits of QFD process.
Module 5
19. What are the different stages of FMEA?
20. Describe the concept of ISO 14000.
Syllabus
TOTAL QUALITY MANAGEMENT
Module 1 (6 Hours)
Quality and leadership
Definition of Quality, Dimensions of Quality, Quality Planning, Basic concepts of Total Quality Management, Principles of TQM.
Leadership – Concepts, Role of Senior Management, Quality Council, Strategic Planning, Barriers to TQM Implementation.
Module 2 (7 Hours)
Motivation and service quality
Employee Involvement – Motivation, Empowerment, Teams, Recognition and Reward, Performance Appraisal, Benefits. Customer Perception of Quality, Service Quality, Customer satisfaction, Customer Retention.
INSTRUMENTATION AND CONTROL ENGINEERING
Reliability and tools for quality
Definition of reliability – key elements; failure analysis – failure density – failure rate – probability of failure - bathtub curve. Mean time to failure (MTTF).
The seven tools of quality, Statistical Fundamentals – Measures of central tendency and dispersion, Population and Sample, Normal Curve.
Module 4 (8 Hours)
Continuous process improvement
Continuous Process Improvement – Juran Trilogy, PDSA Cycle, 5S, Kaizen.
Supplier Partnership – Partnering, sourcing, Supplier Selection, Supplier Rating, Relationship Development.
Benchmarking – Reasons to Benchmark, Benchmarking Process, Quality Function Deployment (QFD), QFD Process, Benefits.
Module 5 (7 Hours)
Quality systems
Total Productive Maintenance (TPM) – Concept, FMEA – Stages of FMEA.
Need for ISO 9000 and Other Quality Systems, ISO 9000:2000 Quality System – Elements, Implementation of Quality System, Documentation, Quality Auditing, ISO 14000 – Concept, Requirements and Benefits.
Text Books
1. Dale H.Besterfiled, et al., “Total Quality Management”, Pearson Education India, 4/e.
Reference Books
1. L.S.Srinath, “Reliability Engineering”, East West, 2005.
2. James R.Evans& William M.Lidsay, “The Management and Control of Quality”,South-Western College Pub, 6/e.
3. Feigenbaum.A.V,“Total Quality Management”, McGraw-Hill Professional, 4/e.
4. Oakland.J.S. “Total Quality Management”, Routledge, 4/e.
Module 3 (7 Hours) INSTRUMENTATION AND CONTROL ENGINEERING
5. Narayana V. and Sreenivasan, N.S., “Quality Management – Concepts and Tasks”,New Age International 1996.
6. Zeiri. “Total Quality Management for Engineers”, Wood Head Publishers, 1991.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Quality and leadership (6 hours)
1.1 Definition of Quality, Dimensions of Quality, Quality Planning, Basic concepts of Total Quality Management, Principles of TQM.
3 hrs
1.2 Leadership – Concepts, Role of Senior Management, Quality Council, Strategic Planning, Barriers to TQM Implementation. 3 hrs
2 Motivation and service quality (7 hours)
2.1 Employee Involvement – Motivation, Empowerment, Teams, Recognition and Reward, Performance Appraisal, Benefits.
3 hrs
2.2 Customer Perception of Quality, Service Quality, Customer satisfaction, Customer Retention.
4 hrs
3 Reliability and tools for quality (7 hours)
3.1 Definition of reliability – key elements; failure analysis – failure density – failure rate – probability of failure - bathtub curve. Mean time to failure (MTTF).
3 hrs
3.2 The seven tools of quality, Statistical Fundamentals – Measures of central tendency and dispersion, Population and Sample, Normal Curve.
4 hrs
4 Continuous process improvement (8 hours)
4.1 Continuous Process Improvement – Juran Trilogy, PDSA Cycle, 5S, Kaizen.
2 hrs
4.2 Supplier Partnership – Partnering, sourcing, Supplier Selection, Supplier Rating, Relationship Development.
2 hrs
4.3 Benchmarking – Reasons to Benchmark, Benchmarking Process. 2 hrs 4.4 Quality Function Deployment (QFD), QFD Process, Benefits. 2 hrs 5 Quality systems (7 hours) 5.1 Total Productive Maintenance (TPM) – Concept. 1 hrs 5.2 FMEA – Stages of FMEA. 2 hrs 5.3 Need for ISO 9000 and Other Quality Systems, ISO 9000:2000
Quality System – Elements, Implementation of Quality System. 2 hrs
5.4 Documentation, Quality Auditing, ISO 14000 – Concept, Requirements and Benefits.
2 hrs
INSTRUMENTATION AND CONTROL ENGINEERING
SEMESTER VI MINOR
INSTRUMENTATION AND CONTROL ENGINEERING
ICT382 PRINCIPLES OF PROCESS CONTROL CATEGORY L T P CREDIT VAC 3 1 0 4
Preamble:
Process control is a sub-discipline of automatic control that involves tailoring methods for efficient operation of industrial processes. Proper application of process control improves the safety and profitability of a process, while maintaining consistently the desired product quality. This course offers students a basic idea of process control loops, P&ID diagrams, op-amp based signal conditioning, electronic controllers, control valves and advanced control strategies.
Prerequisite:
Course on ICT253Introduction to Sensors and Transducers.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Describe the basic elements of a process control loop and analyse P&ID diagrams.
CO 2 Use OPAMP circuits for signal conditioning of signals involved in process control.
CO 3 Design Electronic PID Controllers & ON/OFF Controllers with neutral zone.
CO 4 Identify the parts of a control valve.
CO 5 Explain multi-loop process control strategies.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 2 3 CO 2 3 2 2 3 CO 3 3 2 3 3 CO 4 2 3 CO 5 2 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember 5 10 15 Understand 25 30 55 Apply 20 10 30 Analyse
INSTRUMENTATION AND CONTROL ENGINEERING
Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Draw the block diagram of a process control system.
2. Physical diagram of a process control loop is shown below. Draw the figure using standard P&ID symbols.
Course Outcome 2 (CO2):
INSTRUMENTATION AND CONTROL ENGINEERING
1. Draw the circuit and derive an expression for a gain of 3 Op-amp InstrumentationAmplifier.
2. Use an inverting amplifier, an integrator and a summing amplifier to develop anoutput voltage given by: Vout = 10Vin + 4 ∫ Vindt
Course Outcome 3 (CO3):
1. Level measurement in a sump tank is provided by a transducer scaled as 0.2 V/m. Apump is to be turned on by the application of +5 V when the sump level exceeds 2.0m. The pump is to be turned back off when the sump level drops to 1.5 m. develop atwo-position controller.
2. Draw the circuit of an electronic PID controller and explain its working. Write theexpression for output voltage.
Course Outcome 4 (CO4):
1. With a neat diagram explain the working of butterfly valve.
2. List the advantages of using valve positioner.
Course Outcome 5 (CO5):
1. List the advantages and disadvantages of feed forward control.
2. Discuss the importance of adaptive control in chemical process control.
Model Question paper
Course Code: ICT382
Course Name:PRINCIPLES OF PROCESS CONTROL
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. List the advantages of process control.
2. Differentiate between servo problem and regulator problem. Give examples.
3. Draw the circuit of a voltage follower and explain its application.
4. Explain the basic principle of differential pressure flow meters.
INSTRUMENTATION AND CONTROL ENGINEERING
5. What is meant by controller tuning?
6. Define ISE and IAE.
7. What are the different types of control valves based on valve stem position and flow rate through the valve? Explain.
8. List the advantages of using valve positioner.
9. What is split-range control? Explain.
10. Discuss the importance of adaptive control in chemical process control.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. (a) Physical diagram of a process control loop is shown below. Draw the figure using standard P&ID symbols (8)
(b) Draw the block diagram of the process control loop given above (6)
12. (a) Draw a two tank interacting system and compare it with a non-interacting system. (7) (b) Explain how the basic strategy of control is employed in a room air-conditioning system. What is the controlled variable? What is the manipulated variable? Is the system self-regulating? (7)
Module 2
13. (a) Draw the circuit and derive an expression for a gain of 3 Op-amp Instrumentation Amplifier. (10) (b) List any four characteristics of an ideal op-amp. (4)
INSTRUMENTATION AND CONTROL ENGINEERING
14. (a) A control system needs the average of temperature from three locations. Sensors make the temperature information available as voltages V1, V2 and V3. Develop an op-amp circuit that outputs the average of these voltages. (7) (b) Describe the different types of orifice plates giving their applications. (7)
Module 3
15. (a) Level measurement in a sump tank is provided by a transducer scaled as 0.2 V/m. A pump is to be turned on by the application of +5 V when the sump level exceeds 2.0 m. The pump is to be turned back off when the sump level drops to 1.5 m. Develop a two-position controller. (8) (b) Explain Proportional Derivative (PD) control mode. (6)
16. (a) Draw the circuit of an electronic PID controller and explain its working. Write the expression for output voltage. (10) (b) Define integral windup. How it is prevented? (4)
Module 4
17. (a) Explain cavitation and flashing in control valves. (5)
(b) Draw an I/P converter using nozzle/flapper system and explain its working. (9)
18. (a) Explain the working of following control valves with neat diagram:
i) Gate valve (5)
ii) Ball valve (5)
(b) What are the 3 parts of final control operation? Explain. (4)
Module 5
19. With relevant block diagrams explain
i) Cascade control (7)
ii) Feed forward control (7)
20. (a) Explain inferential control. (8) (b) What is the ratio control, and why is it useful in process control? Give three specific examples. (6)
INSTRUMENTATION AND CONTROL ENGINEERING
Syllabus
PRINCIPLES OF PROCESS CONTROL
Module 1 (8 Hours)
Introduction to Process Control Introduction to process control: Process, process variables, measured variable, manipulated variable, set point and error. Need for process control. Process control block diagram. Examples for simple process control loops. Process lag, load disturbance and their effect on processes. Manual and automatic control, Self-regulating processes, interacting and non-interacting processes, continuous and batch processes, Regulator and servo control. Piping and Instrumentation diagram - instrument terms and symbols.
Module 2 (10 Hours)
Measurement & Signal conditioning Flow measurement methods: Inferential type, Positive displacement type and Mass measurement type. Variable head or differential pressure flow meters: Basic principle, primary elements (Orifice plate, Venturimeter& pitot tubes) Principles of analog signal conditioning; passive circuits; RC filters; Operational Amplifier, Ideal op-amp, virtual ground; Op-amp Circuits in Instrumentation: Voltage follower, Inverting and non-inverting op-amp, Comparator, Summing Amplifier, Instrumentation Amplifier, Differentiator & Integrator
Module 3 (9 Hours)
Control Modes & Electronic Controllers Controller modes: Basic control action, two position (ON-OFF), multi-position, floating control modes. Continuous controller modes: Proportional, Integral, Derivative. Composite controller modes: P-I, P-D, P-I-D. Performance criteria of controllers – the error performance indexes. Controller tuning (Basic idea only) Design of Electronic PID controllers - Design of ON-OFF controllers with neutral zone.
Module 4 (9 Hours)
Final Control Element
INSTRUMENTATION AND CONTROL ENGINEERING
Final control operation: General diagram, electrical and pneumatic signal conversion, electrical actuators, final control element.
Control valve: Principle, Types and Characteristics. Valve body: gate, butterfly, plug and ball valves- valve sizing - Cavitation and flashing in control valves. Valve positioner - advantages of using positioner.
Module 5 (9 Hours)
Advanced Control Strategies
Advanced control schemes – Cascade control, Feed forward control, Ratio control, Adaptive and inferential control, split range and averaging control.
Text Books
1. Johnson C D, “Process Control Instrumentation Technology”, Pearson EducationIndia, 8/e.
2. George Stephenopoulos, “Chemical Process Control”, Pearson Education India.
Reference Books
1. Donald P Eckman, “Automatic Process Control”, Wiley India Pvt Ltd.
2. Peter Harriot, “Process Control”, McGraw Hill.
3. D R Coughanowr, “Process Systems Analysis and Control”, McGraw Hill Education,3/e.
4. Roy choudhary&Shail B Jain “Linear integrated circuits”, New Age InternationalPublishers, 4/e.
5. A K Sawhney & Puneet Sawney, “A Course in Mechanical Measurements andInstrumentation”, Dhanpat Rai & Co. (P) Limited.
6. S K Singh, “Industrial Instrumentation and Control”, McGraw Hill Education, 3/e.
7. B.G Liptak, “Instrument Engineers Handbook - Process Control”, CRC Press.
8. Patranabis D, “Principles of Process Control”, McGraw Hill Education, 3/e.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Introduction to Process Control (8 hours)
INSTRUMENTATION AND CONTROL ENGINEERING
1.1 Introduction to process control: Process, process variables, measured variable, manipulated variable, set point and error.
1 Hours
1.2 Need for process control. Process control block diagram. Examples for simple process control loops.
2 Hours
1.3 Process lag, load disturbance and their effect on processes. 1 Hour 1.4 Manual and automatic control, Self-regulating processes,
interacting and non-interacting processes, continuous and batch processes, Regulator and servo control.
2 Hours
1.5 Piping and Instrumentation diagram - instrument terms and symbols.
2 Hours
2 Measurement & Signal conditioning (10 hours) 2.1 Flow measurement methods: Inferential type, Positive
displacement type and Mass measurement type. 1 Hour
2.2 Variable head or differential pressure flow meters: Basic principle, primary elements (Orifice plate, Venturimeter& pitot tubes)
3 Hours
2.3 Principles of analog signal conditioning; passive circuits; RC filters.
2 Hour
2.4 Op-amp Circuits in Instrumentation: Operational Amplifier, Ideal op-amp, virtual ground, Inverting and non-inverting op-amp, Voltage follower, Comparator
2 Hour
2.5 Summing Amplifier, Instrumentation Amplifier, Differentiator & Integrator (Practical circuits are not required)
2 Hours
3 Control Modes & Electronic Controllers (9 hours) 3.1 Controller modes: Basic control action, two position (ON-OFF),
multi-position, floating control modes. 2 Hours
3.2 Continuous controller modes: Proportional, Integral, Derivative. 1 Hour 3.3 Composite controller modes: P-I, P-D, P-I-D. 2 Hours 3.4 Performance criteria of controllers – the error performance
indexes. Controller tuning (Basic idea only) 1 Hour
3.5 Design of Electronic PID controllers 2 Hours 3.6 Design of ON-OFF controllers with neutral zone 1 Hour 4 Final Control Element (9 hours) 4.1 Final control operation: General diagram 1 Hour 4.2 Electrical and pneumatic signal conversion 1 Hour 4.3 Electrical actuators, final control element. 1 Hour 4.4 Control valve: Principle, Types and Characteristics. 1 Hour 4.5 Valve body: gate, butterfly, plug and ball valves 3 Hours 4.6 Valve sizing - Cavitation and flashing in control valves. 1 Hour 4.7 Valve positioner - advantages of using positioner 1 Hour 5 Advanced Control Strategies (9 hours) 5.1 Advanced control schemes 1 Hour 5.2 Cascade control, Feed forward control 3 Hours 5.3 Ratio control 1 Hour
INSTRUMENTATION AND CONTROL ENGINEERING
5.4 Adaptive and inferential control 2 Hours 5.5 Split range and averaging control 2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICT384 ROLE OF IoT IN DATA ACQUISITION AND AUTOMATION
CATEGORY L T P CREDIT VAC 3 1 0 4
Preamble:
To expose the students to the field of IoT and its applications.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Explain the basic concepts of IoT and IoT networking.
CO 2 Perceive ideas on the different connectivity technologies and Wireless Sensor Networks.
CO 3 Discuss onUAV Networks & M2M Communication, Software defined networking.
CO 4 Explain the basic concepts of cloud computing and fog computing.
CO 5 Discuss on IoT Applications like Smart Homesand Industrial IoT.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 1 2 CO 2 3 1 2 CO 3 3 1 2 CO 4 3 1 2 CO 5 3 1 2
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 50 50 100 Apply Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
INSTRUMENTATION AND CONTROL ENGINEERING
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern: There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Define IoT.
2. Enlist any three characteristics of IoT and explain.
Course Outcome 2 (CO2):
1. Discuss on Plasma HART and Wireless HART.
2. Explain the challenges in WSN.
Course Outcome 3 (CO3):
1. Discuss on different UAV components.
2. Define Software Defined WSN.
Course Outcome 4 (CO4):
1. Explain public cloud.
2. List out the advantages of Fog.
Course Outcome 5 (CO5):
1. Write short note on Home Area Networks.
2. Discuss on the requirements of IIoT.
INSTRUMENTATION AND CONTROL ENGINEERING
Course Code: ICT384
Course Name:ROLE OF IoT IN DATA ACQUISITION AND AUTOMATION
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Discuss on the applications of IoT.2. Define multihoming.3. Explain the working of RFID.4. Compare Stationary WSN and Mobile WSN.5. Explain the difference between FANET and the existing Ad hoc Networks.6. What is Open Flow protocol? Explain.7. Discuss on Community cloud.8. Explain the challenges in Fog.9. Discuss on smart home implementation.10. Explain the benefits of IIoT.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. With neat sketch explain the Functional components of IoT and implementation ofIoT.
12. Discuss on IoT identification and data protocols.
Module 2
13. Discuss on (a) ZigBee (b) NFC.14. Explain the applications of WSN with suitable examples.
Module 3
15. Discuss M2M communication in detail.16. Explain the architecture and controller Placement of SDN.
Module 4
17. With neat sketch discuss on the different Cloud computing service models.
18. Explain the architecture and working of Fog.
Model Question paper INSTRUMENTATION AND CONTROL ENGINEERING

Module 5
19. Discuss in detail on Home Area Networks (HANs).
20. With suitable examples explain the applications of IIoT.
Syllabus
ROLE OF IoT IN DATA ACQUISITION AND AUTOMATION
Module 1 (9 Hours)
Introduction to Internet of Things
Introduction- Characteristics of IoT- Applications of IoT- IoT categories- IoT Enablers and Connectivity Layers - Baseline Technologies-Sensors-Characteristics of a Sensor-Classification of Sensors-Actuators-Types of Actuators-IoT components and implementation-Service Oriented Architecture-IoT Interdependencies-Challenges for IoT.
IoT Networking
Connectivity Terminologies, Gateway Prefix Allotment-Impact of Mobility on Addressing-Multihoming-Deviations from Regular Web-IoT Identifications and Data Protocols.
Module 2 (9 Hours)
Connectivity Technologies
Introduction-IEEE 802.15.4-ZigBee-6LoWPAN-RFID-HART and wireless HART-NFC-Bluetooth-Z-wave-ISA 100.11A.
Wireless Sensor Networks
Introduction-Components of a sensor Node-Modes of Detection-Challenges in WSN-Sensor Web-Cooperation-Behaviour of Nodes in WSN-Information Theoretic Self-Management of WSN-Social Sensing in WSN-Applications of WSN-Wireless Multimedia Sensor Networks-Wireless Nano sensor Networks-Under Water Acoustic Sensor Networks-WSN Coverage-Optimal Geographical Density Control (OGDC) Algorithm-Stationary WSN-Mobile WSN.
Module 3 (9 Hours)
UAV Networks & M2M Communication
Introduction-UAV Components-UAV Networks-Features-Challenges-Topology-FANET-Features-Difference between FANET and the Existing Ad hoc Networks,FANET Design
INSTRUMENTATION AND CONTROL ENGINEERING
Considerations-FANET communication-Gateway Selection in FANETS-M2M Communication-M2M Applications-Types of Node in M2M-M2M Ecosystem-M2M Service platform-Interoperability-Need for Interoperability-Types of Interoperability.
Software Defined Networking
Introduction, Limitations of Current Network-Origin of SDN-SDN Architecture-Rule Placement-OpenFlow Protocol-Controller Placement-Security in SDN-Integrating SDN in IoT-Software defined WSN-SDN for Mobile Networking-Rule Placement at Access Devices.
Module 4 (9 Hours)
Cloud Computing
Introduction-Architecture-Characteristics-Deployment Models-Public Cloud-Private Cloud-Hybrid Cloud-Community Cloud-Multi Cloud-Distributed Cloud-Inter Cloud-Big Data Cloud-HPC Cloud-Service Models-Service Management-Cloud Security.
Fog Computing
Introduction-Why Fog Computing-Requirements of IoT-Architecture of Fog-Working of Fog-Advantages of Fog-Applications of Fog-Challenges in Fog.
Module 5 (9 Hours)
IoT Applications-Smart Homes
Introduction-Origin of Smart Home-Examples of Smart Home Technologies-Smart Home Implementation-Home Area Networks-HAN Elements-HAN Standards-HAN Architectures-HAN Initiatives-Smart Home Benefits and Issues.
Industrial IoT
Introduction-IIoT Requirements-Design Considerations-Applications of IIoT-Manufacturing Industry-Health Care Service Industry-Transportation and Logistics-Mining-Firefighting-Smart Dust-Drones-Futuristic Farming-Aerospace-Energy Networks-Benefits of IIoT-Challenges of IIoT.
Text Books
1. Jeeva Jose, “Internet of Things”, Khanna Book PublishingCo.(P) Ltd, 1/e.
2. RMD Sundaram Shriram K Vasudevan, &Abhishek S Nagarajan,“Internetof Things”, Wiley.
INSTRUMENTATION AND CONTROL ENGINEERING
Reference Books
1. Hanes David , Salgueiro Gonzalo , Grossetete Patrick , Barton Rob , Henry Jerome,“IoT Fundamentals: Networking Technologies, Protocols and Use Cases for theInternet of Things”, Pearson, 1/e.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Introduction to Internet of Things
1.1 Introduction- Characteristics of IoT- Applications of IoT- IoT categories- IoT Enablers and Connectivity Layers
1 Hour
1.2 Baseline technologies-Sensors-Characteristics of a Sensor-Classification of Sensors-Actuators-Types of Actuators-IoT components and implementation-Service Oriented Architecture-IoT Interdependencies-Challenges for IoT.
4 Hours
IoT Networking 1.3 Connectivity Terminologies, Gateway Prefix Allotment-Impact
of Mobility on Addressing-Multihoming-Deviations from Regular Web-IoT Identifications and Data Protocols
4 Hours
2 Connectivity Technologies
2.1 Introduction-IEEE 802.15.4-ZigBee-6LoWPAN-RFID-HART and wireless HART-NFC-Bluetooth-Z-wave-ISA 100.11A
3 Hours
Wireless Sensor Networks 2.2 Introduction-Components of a sensor Node-Modes of Detection-
Challenges in WSN-Sensor Web-Cooperation-Behaviour of Nodes in WSN-Information Theoretic Self-Management of WSN-Social Sensing in WSN-Applications of WSN
3 Hours
2.3 Wireless Multimedia Sensor Networks-Wireless Nano sensor Networks-Under Water Acoustic Sensor Networks-WSN Coverage-Optimal Geographical Density Control (OGDC) Algorithm-Stationary WSN-Mobile WSN
3 Hours
3 UAV Networks & M2M Communication
3.1 Introduction-UAV Components-UAV Networks-Features-Challenges-Topology-FANET-Features-Difference between FANET and the Existing Ad hoc Networks,FANET Design Considerations
3 Hours
3.2 FANET communication-Gateway Selection in FANETS-M2M 3 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
Communication-M2M Applications-Types of Node in M2M-M2M Ecosystem-M2M Service platform-Interoperability-Need for Interoperability-Types of Interoperability Software Defined Networking
3.3 Introduction, Limitations of Current Network-Origin of SDN-SDN Architecture-
1 Hour
3.4 Rule Placement-OpenFlow Protocol-Controller Placement-Security in SDN-Integrating SDN in IoT-Software defined WSN-SDN for Mobile Networking-Rule Placement at Access Devices
2 Hours
4 Cloud Computing
4.1 Introduction-Arhitecture-Characteristics-Deployment Models-Public Cloud-Private Cloud-Hybrid Cloud-Community Cloud-
3 Hours
4.2 Multi Cloud-Distributed Cloud-Inter Cloud-Big Data Cloud-HPC Cloud-Service Models-Service Management-Cloud Security
3 Hours
Fog Computing 4.3 Introduction-Why Fog Computing-Requirements of IoT- 1 Hour 4.4
Architecture of Fog-Working of Fog-Advantages of Fog-Applications of Fog-Challenges in Fog
2 Hours
5 IoT Applications-Smart Homes 5.1 Introduction-Origin of Smart Home-Examples of Smart Home
Technologies 1 Hour
5.2 Smart Home Implementation-Home Area Networks-HAN Elements-HAN Standards-HAN Architectures-HAN Initiatives-Smart Home Benefits and Issues
3 Hours
Industrial IoT-Introduction 5.3 IIoT Requirements-Design Considerations-Applications of IIoT-
Manufacturing Industry-Health Care Service Industry 3 Hours
5.4 Transportation and Logistics-Mining-Firefighting-Smart Dust-Drones-Futuristic Farming-Aerospace-Energy Networks-Benefits of IIoT-Challenges of IIoT
2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING

SEMESTER VI HONOURS
INSTRUMENTATION AND CONTROL ENGINEERING
ICT394 ADVANCED PROCESS CONTROL CATEGORY L T P CREDIT VAC 3 1 0 4
Preamble:
The aim of the Advanced Process Control course is to enable the students to design controllers for process with difficult dynamics and disturbances.
Prerequisite:
ICT373 Process Dynamics.
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Derive good process models through model formulation, parameter estimation, and model validation.
CO 2 Analyse the characteristics of feedback control systems with classical control mode.
CO 3 Design controller for process having difficult type dynamics like time delay, inverse response and open-loop instability.
CO 4 Design of cascade controller for the process where the manipulating variable is either directly or indirectly affected by disturbances.
CO 5 Design of feedforward controller for the process where the disturbance doesn’t have any influence on manipulating variable.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 3 3 CO 2 3 3 3 CO 3 3 3 3 3 CO 4 3 3 3 3 CO 5 3 3 3 3
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 22 15 37 Apply 28 35 63
INSTRUMENTATION AND CONTROL ENGINEERING
Analyse Evaluate Create
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. The process shown below is a continuous stirred mixing tank used to produce F litres/min of brine solution of mass concentration CB gm/liter. The raw materials are fresh water, supplied at a flow rate of FW litres/min, and a highly concentrated brine solution (mass concentration CB gm/liter) supplied at a flow rate of FB litres/min. The volume of material in the tank is V litres, the liquid level in the tank is h meters, and the tank’s cross-sectional area, A(m2), is assumed constant. Assuming that the tank is well mixed, so that the brine concentration in the tank is uniformly equal to CB, and that the flow rate out of the tank is proportional to the square root of the liquid level, obtain a mathematical model for this process.
Course Outcome 2 (CO2):
INSTRUMENTATION AND CONTROL ENGINEERING
1. Following figure shows a feedback scheme for controlling the exit temperature of an industrial heat exchanger that utilizes chilled brine to cool down a hot process stream. Assuming that TB the brine temperature in oC remains constant and given the following transfer function relations:
(𝑇𝑇 − 𝑇𝑇∗) =−(1 − 0.5𝑒𝑒−10𝑆𝑆)
(40𝑆𝑆 + 1)(15𝑆𝑆 + 1)(𝐹𝐹𝐵𝐵 − 𝐹𝐹𝐵𝐵∗)
(𝑇𝑇 − 𝑇𝑇∗) = 0.5𝑒𝑒−10𝑆𝑆(𝑇𝑇𝑖𝑖 − 𝑇𝑇𝑖𝑖∗) and given that the controller is a pure proportional controller operating according to
(𝐹𝐹𝐵𝐵 − 𝐹𝐹𝐵𝐵∗) = −𝐾𝐾𝐶𝐶𝑇𝑇𝑠𝑠𝑒𝑒𝑠𝑠𝑠𝑠𝑠𝑠𝑖𝑖𝑠𝑠𝑠𝑠 − 𝑇𝑇 and that the measuring device has negligible dynamics. Obtain the closed-loop transfer function relationships for this system. For a 2oC step increase in the process feed stream temperature, what is the steady state offset observed in the exit temperature as a function of the controller gain KC?
Course Outcome 3 (CO3):
1. Find the range of KC values for which the inverse response system with the following transfer function will remain stable under proportional feedback control.
𝑦𝑦(𝑆𝑆) =5(1 − 0.5𝑆𝑆)
(2𝑆𝑆 + 1)(0.5𝑆𝑆 + 1)𝑢𝑢(𝑆𝑆)
Course Outcome 4 (CO4):
1. Consider the cascade control system shown in following figure. Specify 𝐾𝐾𝐶𝐶2 so that
the gain margin ≥ 1.7 and phase margin ≥ 300 for the slave loop. Then specify 𝐾𝐾𝐶𝐶1
and 𝜏𝜏𝐼𝐼 for the master loop using any one tuning techniques.
INSTRUMENTATION AND CONTROL ENGINEERING
Course Outcome 5 (CO5):
1. The closed loop system shown in following figure has the following transfer
functions:
𝐺𝐺𝑃𝑃(𝑆𝑆) =1
𝑆𝑆 + 1; 𝐺𝐺𝑑𝑑(𝑆𝑆) =
2(𝑆𝑆 + 1)(5𝑆𝑆 + 1) ; 𝐺𝐺𝑉𝑉 = 𝐺𝐺𝑚𝑚 = 𝐺𝐺𝑠𝑠 = 1
Design a feedforward controller based on a steady-state analysis, and based on
dynamic analysis.
Model Question paper
Course Code: ICT394
Course Name:ADVANCED PROCESS CONTROL
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Carefully explain why it is possible for a linear process models to give rise to anonlinear parameter estimation problems.
2. Discuss about the validation of theoretical models.3. Explain how offset error is varied with respect to the proportional controller.4. Discuss about the derivation of closed-loop transfer function of multi-loop feedback
control block diagram.5. Explain how the process transfer-function model indicates the presence of such
difficult dynamic characteristics.6. Discuss about the procedure of design of smith predictor.7. Can we use cascade controller if the process is affected by disturbances? Explain.8. Explain integral windup.
INSTRUMENTATION AND CONTROL ENGINEERING
9. What are the advantages and disadvantages of feedback controller? 10. Discuss about any one disaster due to failure in process control.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. The process shown below is a continuous stirred mixing tank used to produce F litres/min of brine solution of mass concentration CB gm/liter. The raw materials are fresh water, supplied at a flow rate of FW litres/min, and a highly concentrated brine solution (mass concentration CB gm/liter) supplied at a flow rate of FB litres/min. The volume of material in the tank is V litres, the liquid level in the tank is h meters, and the tank’s cross-sectional area, A(m2), is assumed constant. Assuming that the tank is well mixed, so that the brine concentration in the tank is uniformly equal to CB, and that the flow rate out of the tank is proportional to the square root of the liquid level, obtain a mathematical model for this process.
12. Discuss about linear estimation.
Module 2
13. Following figure shows a feedback scheme for controlling the exit temperature of an industrial heat exchanger that utilizes chilled brine to cool down a hot process stream. Assuming that TB the brine temperature in oC remains constant and given the following transfer function relations:
(𝑇𝑇 − 𝑇𝑇∗) =−(1 − 0.5𝑒𝑒−10𝑆𝑆)
(40𝑆𝑆 + 1)(15𝑆𝑆 + 1)(𝐹𝐹𝐵𝐵 − 𝐹𝐹𝐵𝐵∗)
(𝑇𝑇 − 𝑇𝑇∗) = 0.5𝑒𝑒−10𝑆𝑆(𝑇𝑇𝑖𝑖 − 𝑇𝑇𝑖𝑖∗) and given that the controller is a pure proportional controller operating according to
(𝐹𝐹𝐵𝐵 − 𝐹𝐹𝐵𝐵∗) = −𝐾𝐾𝐶𝐶𝑇𝑇𝑠𝑠𝑒𝑒𝑠𝑠𝑠𝑠𝑠𝑠𝑖𝑖𝑠𝑠𝑠𝑠 − 𝑇𝑇 and that the measuring device has negligible dynamics. Obtain the closed-loop transfer function relationships for this system. For a 2oC step increase in the process feed stream temperature, what is the steady state offset observed in the exit temperature as a function of the controller gain KC?
INSTRUMENTATION AND CONTROL ENGINEERING
14. By using a first-orderPade approximation for the time-delay term, find the value of K
for which the closed-loop system will exhibit sustained oscillations of closed-loop system shown in following figure.
Module 3
15. Design a Smith predictor for the time-delay process 𝑦𝑦(𝑆𝑆) = 5𝑒𝑒−10𝑆𝑆
15𝑆𝑆+1𝑢𝑢(𝑆𝑆) by specifying
the transfer function to be implemented in the minor loop around the controller yet to design. Assuming the process model is perfect, implement th Smith predictor using PI controller with gain 0.3 and integral time constant 15seconds.
16. Find the range of KC values for which the inverse response system with the following transfer function will remain stable under proportional feedback control.
𝑦𝑦(𝑆𝑆) =5(1 − 0.5𝑆𝑆)
(2𝑆𝑆 + 1)(0.5𝑆𝑆 + 1)𝑢𝑢(𝑆𝑆)
Module 4
17. Consider the block diagram of cascade controller shown below with the following
transfer function:
𝐺𝐺𝑉𝑉 =5
𝑆𝑆 + 1; 𝐺𝐺𝑃𝑃1 =
4(4𝑆𝑆 + 1)(2𝑆𝑆 + 1) ; 𝐺𝐺𝑃𝑃2 = 1; 𝐺𝐺𝑑𝑑2 = 1;
𝐺𝐺𝑚𝑚1 = 0.05; 𝐺𝐺𝑚𝑚2 = 0.2; 𝐺𝐺𝑑𝑑1 =1
3𝑆𝑆 + 1
where the time constants have units of minutes and the gains have consistent units.
Determine the stability limits for a conventional proportional controller as well as for
a cascade control system consisting of two proportional controllers.
INSTRUMENTATION AND CONTROL ENGINEERING
18. Consider the cascade control system shown in following figure. Specify 𝐾𝐾𝐶𝐶2 so that
the gain margin ≥ 1.7 and phase margin ≥ 300 for the slave loop. Then specify 𝐾𝐾𝐶𝐶1
and 𝜏𝜏𝐼𝐼 for the master loop using any one tuning techniques.
Module 5
19. The closed loop system shown in following figure has the following transfer
functions:
𝐺𝐺𝑃𝑃(𝑆𝑆) =1
𝑆𝑆 + 1; 𝐺𝐺𝑑𝑑(𝑆𝑆) =
2(𝑆𝑆 + 1)(5𝑆𝑆 + 1) ; 𝐺𝐺𝑉𝑉 = 𝐺𝐺𝑚𝑚 = 𝐺𝐺𝑠𝑠 = 1
Design a feedforward controller based on a steady-state analysis, and based on
dynamic analysis.
INSTRUMENTATION AND CONTROL ENGINEERING
20. The distillation column shown in following figure has the following transfer function model:
𝑌𝑌′(𝑆𝑆)𝐷𝐷′(𝑆𝑆) =
2𝑒𝑒−20𝑆𝑆
95𝑆𝑆 + 1; 𝑌𝑌′(𝑆𝑆)𝐹𝐹(𝑆𝑆) =
0.5𝑒𝑒−30𝑆𝑆
60𝑆𝑆 + 1
with 𝐺𝐺𝑉𝑉 = 𝐺𝐺𝑚𝑚 = 𝐺𝐺𝑠𝑠 = 1. Design a feedforward controller based on a steady state analysis, and also based on a dynamic analysis.
Syllabus
ADVANCED PROCESS CONTROL
Module 1 (9 Hours)
Theoretical Process Modelling
Introduction: modelling the behaviour of dynamic processes, procedure for theoretical process development; Development of theoretical process models; Examples of theoretical model formulation: lumped parameter systems, stage wise processes, distributed parameter systems; Parameter estimation in theoretical models: basic principle of parameter estimation, parameter estimation in differential equation models with analytical solutions, parameter estimation in differential equation model with numerical methods; Validation of theoretical models.
Module 2 (9 Hours)
Feedback Control Systems
The concept of feedback control: the feedback control strategy, elements of the feedback loop and block diagram representation; Block diagram development: individual elements and transfer functions, the closed-loop system block diagram; Classical feedback controllers (review); Closed-loop transfer functions: closed-loop transfer function from single loop feedback control system block diagram, closed-loop transfer function from multiloop feedback control system block diagram; Closed-loop transient response: preliminary considerations: transient response of a first-order system under proportional feedback control, transient response of a first-order system under proportional plus integral feedback control,
INSTRUMENTATION AND CONTROL ENGINEERING
transient response of a first order system under other feedback control strategies, feedback controllers and steady-state offset, closed-loop stability analysis of a first-order system under PI control.
Module 3 (9 Hours)
Controller Design for Processes with Difficult Dynamics
Difficult process dynamics: characteristics of difficult process dynamics, non-minimum phase (NMP) systems; Time delay systems: control problems, conventional feedback controller design, time delay compensation, design procedure, time delay with proportional controller, time delay with integral controller, time delay with proportional plus integral controller; Inverse-response systems: control problems, approximate time delay model for an inverse response system using a reverse Pade approximation, inverse response compensation; Open-loop unstable systems.
Module 4 (9 Hours)
Cascade Controller
Jacketed Reactor: process equation, control objective, simple feedback, temperature-to-flow cascade, temperature-to-temperature cascade; Block diagrams: disturbances with the cooling media, disturbances with the reacting media; Problem element; Cooling media disturbances; effect of varying heat transfer rate; Design considerations for cascade controller: process with identifiable intermediate variable, response to disturbances, closed loop characteristics of cascade control system, design and tuning guidelines, proportional mode in the inner loop, integral mode in the inner loop, derivative mode in the inner loop, proportional mode in the outer loop, integral mode in the outer loop, derivative modes in outer loop, evaluation of inner loop tuning; stability; saturation; Interacting stages: block diagram for interacting stages; windup in cascade controls: starting of windup, recovery from windup, why windup occurs? Windup prevention.
Module 5 (9 Hours)
Feedforward Control Advantages and Disadvantages of feedback control, introduction to feedforward control; Feedforward controller design based on steady-state models: blending system; Feedforward controller design based on dynamic models: stability considerations, lead-lag units; Relationship between the steady-state and dynamic design methods; practical considerations; configurations for feedforward-feedback control; tuning feedforward controllers; Failures in Process Control.
INSTRUMENTATION AND CONTROL ENGINEERING
Text Books
1. Babatunde A. Ogunnaike& W. Harmon Ray, “Process Dynamics Modeling, andControl”, Oxford University Press.
2. Dale E. Seborg, Thomas F. Edgar, and Duncan A. Mellichamp, “Process Dynamicsand Control”, John Wiley & Sons, Inc.
3. Cecil L Smith, “Advanced Process Control Beyond Single-Loop Control”, A JohnWiley and Sons.
Reference Books
1. F.G.Shinsky, “Process Control Systems: Application, Design and Tuning”, McGrawHill.
2. B.G.Liptak, “Handbook of Process Control”, Chiller Book Co.
3. Brian Roffel and Ben Betlem, “Process Dynamics and Control Modeling for Controland Prediction”, John Wiley & Sons.
4. J M Douglas, “Process Dynamics and Control Volume 1 Analysis of DynamicSystems”, Prentice Hall of India.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Theoretical Process Modelling (9 Hours)
1.1 Introduction: modelling the behaviour of dynamic processes, procedure for theoretical process development; Development of theoretical process models.
1 Hour
1.2 Examples of theoretical model formulation: lumped parameter systems, stage wise processes, distributed parameter systems.
3 Hours
1.3 Parameter estimation in theoretical models: basic principle of parameter estimation, parameter estimation in differential equation models with analytical solutions, parameter estimation in differential equation model with numerical methods.
4 Hours
1.4 Validation of theoretical models. 1 Hour 2 Feedback Control Systems (9 Hours)
2.1 The concept of feedback control: the feedback control strategy, elements of the feedback loop and block diagram representation.
1 Hour
2.2 Block diagram development: individual elements and transfer functions, the closed-loop system block diagram.
1 Hour
INSTRUMENTATION AND CONTROL ENGINEERING
2.3 Classical feedback controllers (review) 1 Hour 2.4 Closed-loop transfer functions: closed-loop transfer function
from single loop feedback control system block diagram, closed-loop transfer function from multiloop feedback control system block diagram.
2 Hours
2.5 Closed-loop transient response: preliminary considerations: transient response of a first-order system under proportional feedback control, transient response of a first-order system under proportional plus integral feedback control, transient response of a first order system under other feedback control strategies, feedback controllers and steady-state offset, closed-loop stability analysis of a first-order system under PI control.
4 Hours
3 Controller Design for Processes with Difficult Dynamics (9 Hours)
3.1 Difficult process dynamics: characteristics of difficult process dynamics, non-minimum phase (NMP) systems.
1 Hour
3.2 Time delay systems: control problems, conventional feedback controller design, time delay compensation, design procedure, time delay with proportional controller, time delay with integral controller, time delay with proportional plus integral controller.
3 Hours
3.3 Inverse-response systems: control problems, approximate time delay model for an inverse response system using a reverse Pade approximation, inverse response compensation.
3 Hours
3.4 Open-loop unstable systems 2 Hours 4 Cascade Controller (9 Hours)
4.1 Jacketed Reactor: process equation, control objective, simple feedback, temperature-to-flow cascade, temperature-to-temperature cascade.
1 Hour
4.2 Block diagrams: disturbances with the cooling media, disturbances with the reacting media; Problem element.
1 Hour
4.3 Cooling media disturbances; effect of varying heat transfer rate. 1 Hour 4.4 Design considerations for cascade controller: process with
identifiable intermediate variable, response to disturbances, closed loop characteristics of cascade control system, design and tuning guidelines, proportional mode in the inner loop, integral mode in the inner loop, derivative mode in the inner loop, proportional mode in the outer loop, integral mode in the outer loop, derivative modes in outer loop, evaluation of inner loop tuning; stability; saturation.
3 Hours
4.5 Interacting stages: block diagram for interacting stages; windup in cascade controls: starting of windup, recovery from windup, why windup occurs? Windup prevention.
3 Hours
5 Feedforward Control (9 Hours)
INSTRUMENTATION AND CONTROL ENGINEERING
5.1 Advantages and Disadvantages of feedback control, introduction to feedforward control.
1 Hour
5.2 Feedforward controller design based on steady-state models: blending system.
1 Hour
5.3 Feedforward controller design based on dynamic models: stability considerations, lead-lag units.
3 Hours
5.4 Relationship between the steady-state and dynamic design methods; practical considerations; configurations for feedforward-feedback control; tuning feedforward controllers.
3 Hours
5.5 Failures in Process Control: Bhopal Disaster, Three Mile Island Disaster, Texas City Disaster, etc. (Case study. Any disaster can be discussed)
1 Hours
INSTRUMENTATION AND CONTROL ENGINEERING
ICT396 FIELD AND SERVICE ROBOTICS CATEGORY L T P CREDIT VAC 3 1 0 4
Preamble:
The course on Field &Service Robotics is intended to provide a reasonable understanding of various field and service robots, how they function etc. The course also familiarizes the concepts of localisation and path planning.
Prerequisite:
NIL
Course Outcomes:
After the completion of the course the student will be able to
CO 1 Select sensors for field and service robots.
CO 2 Explain the localisation techniques used in the field and service robots.
CO 3 Explainthe path planning techniques usedinthe field and service robots.
CO 4 Discuss about the role of robots in military, agriculture, hospitals, etc.
CO 5 Discuss about anatomy of humanoids and operation principle of different parts of a humanoid.
Mapping of course outcomes with program outcomes
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10 PO 11 PO 12 CO 1 2 CO 2 2 3 CO 3 2 3 CO 4 2 2 3 CO 5 2
Assessment Pattern
Bloom’s Category Continuous Assessment Tests End Semester Examination 1 2
Remember Understand 50 50 100 Apply Analyse Evaluate Create
INSTRUMENTATION AND CONTROL ENGINEERING
Mark distribution
Total Marks CIE ESE ESE Duration
150 50 100 3 hours
Continuous Internal Evaluation Pattern:
Attendance : 10 marks Continuous Assessment Test (2 numbers) : 25 marks Assignment/Quiz/Course project : 15 marks
End Semester Examination Pattern:
There will be two parts; Part A and Part B. Part A contains 10 questions with 2 questions from each module, having 3 marks for each question. Students should answer all questions. Part B contains 2 questions from each module of which student should answer any one. Each question can have maximum 2 sub-divisions and carry 14 marks.
Course Level Assessment Questions
Course Outcome 1 (CO1):
1. Discuss the present status and future trends in robotics.
2. Explain the basic components of a robotic system.
3. Explain accuracy and resolution of a robotic system.
Course Outcome 2 (CO2):
1. Explain Probabilistic Map based Localization.
2. Explain positioning beacon system.
3. Explain route-based localization.
Course Outcome 3 (CO3):
1. Explain obstacle avoidance in path planning.
2. Explain Road map path planning.
3. Explain Potential field path planning.
Course Outcome 4 (CO4):
1. Explain the civilian and military applications of robots.
INSTRUMENTATION AND CONTROL ENGINEERING
2. Explain the role of robots in agriculture.
3. Explain the technique of collision avoidance in robots.
Course Outcome 5 (CO5):
1. Explain Models of emotion and motivation of Humanoids.
2. Explain sound and speech generation of Humanoids.
3. Explain Gaze and auditory orientation control of Humanoids.
Model Question paper
Course Code: ICT396
Course Name:FIELD AND SERVICE ROBOTICS
Max.Marks:100 Duration: 3 Hours
PARTA
Answer all Questions. Each question carries 3 Marks
1. Explain the role of Robotic vision sensor in Robotics.2. Explain Resolution, and Degrees of freedom of Robot.3. Mention the various challenges of Localization.4. List the features of Globally unique localization.5. Give an overview of path planning.6. Explain Cell decomposition path planning.7. Explain the role of Robots in agriculture and mining.8. What are the features of Ariel Robots? Explain.9. Explain Wheeled and legged Humanoids.10. Explain Gaze and auditory orientation control of Humanoids.
PART B
Answer any onefull question from each module. Each question carries 14 Marks
Module 1
11. Explain the various sensors used in Robotics.12. Explain the Mechanisms and transmission of end effectors.
Module 2
13. Explain Monte Carlo localization.
INSTRUMENTATION AND CONTROL ENGINEERING
14. Explain in detail about Positioning beacon systems.
Module 3
15. Explain Planning and Navigation approach in tiered robot architectures.16. Explain
(a) Cell decomposition path planning, and(b) Potential field path planning.
Module 4
17. Explain the role of Robots in Space Applications.
18. Explain civilian and military applications of Robots.
Module 5
19. Explain Sound and speech generation of Humanoids.
20. Explain Human activity recognition using sound, Vision, Tactile SensinginHumanoids.
Syllabus
FIELD AND SERVICE ROBOTICS
Module 1 (9 Hours)
History of robots, Classification of robots, Present status, and future trends. Basic components of robotic system.
Basic terminology- Accuracy, Repeatability, Resolution, Degree of freedom. Mechanisms and transmission of end effectors, Grippers-different methods of gripping.
Sensors in robot – Touch sensors, tactile sensor, Proximity and range sensors, Robotic vision sensor, Force sensor, Light sensors, Pressure sensors.
Module 2 (8 Hours)
Localization Introduction-Challenges of Localization- Map Representation- Probabilistic Map based Localization, Monte Carlo localization- Landmark based navigation-Globally unique localization- Positioning beacon systems- Route based localization.
INSTRUMENTATION AND CONTROL ENGINEERING
Planning and Navigation Introduction-Path planning overview- Road map path planning- Cell decomposition path planning Potential field path planning-Obstacle avoidance - Case studies: tiered robot architectures.
Module 4 (9 Hours)
Field Robots -Ariel robots- Collision Avoidance-Robots for agriculture, mining, exploration, underwater, civilian, and military applications, nuclear applications, Space applications.
Module 5 (10 Hours)
Humanoids: Wheeled and legged, Legged locomotion and balance, Arm movement, Gaze and auditory orientation control, Facial expression, Hands and manipulation, Sound and speech generation, Motion capture/Learning from demonstration, Human activity recognition using vision, touch, sound, Vision, Tactile Sensing, Models of emotion and motivation. Performance, Interaction, Safety and robustness, Applications, Case studies.
Text Books
1. Roland Siegwart, andIllah R. Nourbakhsh, “Introduction to Autonomous MobileRobots”, The MIT Press, 2004.
2. Zaier R, “The Future Of Humanoid Robots –Research And Applications”, Intechweb.
Reference Books
1. Alexander Zelinsky, “Field and Service Robotics”, Springer-Verlag London, 1998.
Course Contents and Lecture Schedule
No Topic No. of Lectures 1 Introduction to robotics (9 Hours)
1.1 History of robots, Classification of robots, Present status, and future trends. Basic components of robotic system.
2 Hours
1.2 Basic terminology- Accuracy, Repeatability, Resolution, Degree of freedom.
1 Hour
1.3 Mechanisms and transmission of end effectors 1 Hour 1.4 Grippers-different methods of gripping. 2 Hours 1.5 Sensors in robot – Touch sensors, tactile sensor, Proximity and
range sensors, Robotic vision sensor, Force sensor, Light sensors, Pressure sensors
3 Hours
Module 3 (9 Hours) INSTRUMENTATION AND CONTROL ENGINEERING
2 Localization (8 hours)
2.1 Localization Introduction-Challenges of Localization 1 Hour 2.2 Map Representation- Probabilistic Map based Localization 2 Hours 2.3 Monte Carlo localization- Landmark based navigation 2 Hours 2.4 Globally unique localization- Positioning beacon systems 2 Hours 2.5 Route based localization. 1 Hour 3 Planning and Navigation (9 hours)
3.1 Planning and Navigation Introduction-Path planning overview 2 Hours 3.2 Road map path planning- 2 Hours 3.3 Cell decomposition path planning 2 Hours 3.4 Potential field path planning-Obstacle avoidance 1 Hour 3.5 Case studies: tiered robot architectures 2 Hours 4 Field Robot Applications (9 Hours)
4.1 Field Robots -Ariel robots, Collision Avoidance. 2 Hours
4.2 Robots for agriculture, mining 2 Hours 4.3 Robots for exploration, underwater applications 2 Hours 4.4 Civilian and military applications, nuclear applications, Space
applications 3 Hours
5 Humanoids (10 Hours) 5.1 Humanoids: Wheeled and legged, Legged locomotion and
balance, Arm movement 1 Hour
5.2 Gaze and auditory orientation control, Facial expression, Hands, and manipulation
1 Hour
5.3 Sound and speech generation, Motion capture/Learning from demonstration
2 Hours
5.4 Human activity recognition using vision, touch, sound, Vision, Tactile Sensing,
2 Hours
5.5 Models of emotion and motivation. Performance, Interaction 2 Hours 5.6 Safety and robustness, Applications, Case studies 2 Hours
INSTRUMENTATION AND CONTROL ENGINEERING