research work at vr3lab for prof. vito bevilacqua
TRANSCRIPT
M Fiorentino Politecnico di Bari
wwwvr3labit
RESEARCH WORK
at
VR3Lab
Bari 11122012
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Presentation overview
bull Who am I
bull Vr3lab
bull VRARMR Technology
bull 3 x Thesis Proposals
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My research skills hellip
CAD
Catia Solid WorkEdge AutoCad etc
Interchange Formats (STEP IGES etc)
CAD kernel programming (ACIS OpenCascade)
Virtual amp Augmented Reality
VRAR libraries (stereo tracking etc)
VRAR HCI amp human issues
CG Interactive models (Vrml osg collada etc)
Scene graphs (OSG Open Inventor)
Dev Tools (C++QT Visual studio Cmake svn)
Page 3
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My teachings hellip
bull Professore aggregato
bull CAD modeling and Simulation (6 CFU)
bull CAD used Solid EdgeSiemens NX
bull gt100 students
bull Assistant Professor
bull Technical Representation Methods (ie Drawings ) (6CFU)
bull (6CFU) AutoCad Mechanical Drawing standards
bull gt100 students
Page 4
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My visitshellip
bull 2000 Phd (3 years) in advanced production system at Dimeg
bull 2001 Fraunhofer IGDA2 Germany A2 (Prof Andre Stork)
bull 2002 CPIC Davis USA (Prof Bernd Hamman)
bull 2003 VRlab Transilvania University Romania (Prof Doru Talaba)
bull 2006 ICG Graz Austria (Prof Dieter Schmalstieg)
bull 2012 Heinz Nixdorf Institut Paderborn Germania
Page 5
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3lab Team
bull Giuseppe Monno (Prof Ord Disegno Industriale Director)
bull Antonio E Uva (Prof Ass Metodi Rapp Tecnica)
bull Michele Fiorentino (Researcher)
bull Saverio de Bernardis (PhD Student)
bull Ing Michele Gattullo (Collaborator)
bull gt20 ThesisYear
Location
DIMEG Via Japigia 182- 70100 BARI Italy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The lab
Virtual reality and Reality Reconstruction Lab (1999)
bull 20 x 18 m passive stereo screen
bull Art Dtrack 3D Tracking System
bull LiteEYE HMD
bull Reverse Engineering System (Scanprobe ST)
bull InputOutput devices
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3Lab research Emerging
Technologies for Engineering
Human Computer Interfaces
Natural Interface (ie Ipod)
Gesture recognition
Visualization
Micro-Large projection
Augmented reality
Tracking
Z-cam
Image processing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vision at VR3Lab
Advanced Desktop Collaborative Mobile
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Engineer of the future
SENSORS UBIQUTUS COMPUTERS
AR VISUALIZATION
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
VirtualAugmented
Reality Pillshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Presentation overview
bull Who am I
bull Vr3lab
bull VRARMR Technology
bull 3 x Thesis Proposals
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My research skills hellip
CAD
Catia Solid WorkEdge AutoCad etc
Interchange Formats (STEP IGES etc)
CAD kernel programming (ACIS OpenCascade)
Virtual amp Augmented Reality
VRAR libraries (stereo tracking etc)
VRAR HCI amp human issues
CG Interactive models (Vrml osg collada etc)
Scene graphs (OSG Open Inventor)
Dev Tools (C++QT Visual studio Cmake svn)
Page 3
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My teachings hellip
bull Professore aggregato
bull CAD modeling and Simulation (6 CFU)
bull CAD used Solid EdgeSiemens NX
bull gt100 students
bull Assistant Professor
bull Technical Representation Methods (ie Drawings ) (6CFU)
bull (6CFU) AutoCad Mechanical Drawing standards
bull gt100 students
Page 4
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My visitshellip
bull 2000 Phd (3 years) in advanced production system at Dimeg
bull 2001 Fraunhofer IGDA2 Germany A2 (Prof Andre Stork)
bull 2002 CPIC Davis USA (Prof Bernd Hamman)
bull 2003 VRlab Transilvania University Romania (Prof Doru Talaba)
bull 2006 ICG Graz Austria (Prof Dieter Schmalstieg)
bull 2012 Heinz Nixdorf Institut Paderborn Germania
Page 5
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3lab Team
bull Giuseppe Monno (Prof Ord Disegno Industriale Director)
bull Antonio E Uva (Prof Ass Metodi Rapp Tecnica)
bull Michele Fiorentino (Researcher)
bull Saverio de Bernardis (PhD Student)
bull Ing Michele Gattullo (Collaborator)
bull gt20 ThesisYear
Location
DIMEG Via Japigia 182- 70100 BARI Italy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The lab
Virtual reality and Reality Reconstruction Lab (1999)
bull 20 x 18 m passive stereo screen
bull Art Dtrack 3D Tracking System
bull LiteEYE HMD
bull Reverse Engineering System (Scanprobe ST)
bull InputOutput devices
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3Lab research Emerging
Technologies for Engineering
Human Computer Interfaces
Natural Interface (ie Ipod)
Gesture recognition
Visualization
Micro-Large projection
Augmented reality
Tracking
Z-cam
Image processing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vision at VR3Lab
Advanced Desktop Collaborative Mobile
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Engineer of the future
SENSORS UBIQUTUS COMPUTERS
AR VISUALIZATION
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
VirtualAugmented
Reality Pillshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My research skills hellip
CAD
Catia Solid WorkEdge AutoCad etc
Interchange Formats (STEP IGES etc)
CAD kernel programming (ACIS OpenCascade)
Virtual amp Augmented Reality
VRAR libraries (stereo tracking etc)
VRAR HCI amp human issues
CG Interactive models (Vrml osg collada etc)
Scene graphs (OSG Open Inventor)
Dev Tools (C++QT Visual studio Cmake svn)
Page 3
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My teachings hellip
bull Professore aggregato
bull CAD modeling and Simulation (6 CFU)
bull CAD used Solid EdgeSiemens NX
bull gt100 students
bull Assistant Professor
bull Technical Representation Methods (ie Drawings ) (6CFU)
bull (6CFU) AutoCad Mechanical Drawing standards
bull gt100 students
Page 4
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My visitshellip
bull 2000 Phd (3 years) in advanced production system at Dimeg
bull 2001 Fraunhofer IGDA2 Germany A2 (Prof Andre Stork)
bull 2002 CPIC Davis USA (Prof Bernd Hamman)
bull 2003 VRlab Transilvania University Romania (Prof Doru Talaba)
bull 2006 ICG Graz Austria (Prof Dieter Schmalstieg)
bull 2012 Heinz Nixdorf Institut Paderborn Germania
Page 5
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3lab Team
bull Giuseppe Monno (Prof Ord Disegno Industriale Director)
bull Antonio E Uva (Prof Ass Metodi Rapp Tecnica)
bull Michele Fiorentino (Researcher)
bull Saverio de Bernardis (PhD Student)
bull Ing Michele Gattullo (Collaborator)
bull gt20 ThesisYear
Location
DIMEG Via Japigia 182- 70100 BARI Italy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The lab
Virtual reality and Reality Reconstruction Lab (1999)
bull 20 x 18 m passive stereo screen
bull Art Dtrack 3D Tracking System
bull LiteEYE HMD
bull Reverse Engineering System (Scanprobe ST)
bull InputOutput devices
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3Lab research Emerging
Technologies for Engineering
Human Computer Interfaces
Natural Interface (ie Ipod)
Gesture recognition
Visualization
Micro-Large projection
Augmented reality
Tracking
Z-cam
Image processing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vision at VR3Lab
Advanced Desktop Collaborative Mobile
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Engineer of the future
SENSORS UBIQUTUS COMPUTERS
AR VISUALIZATION
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
VirtualAugmented
Reality Pillshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My teachings hellip
bull Professore aggregato
bull CAD modeling and Simulation (6 CFU)
bull CAD used Solid EdgeSiemens NX
bull gt100 students
bull Assistant Professor
bull Technical Representation Methods (ie Drawings ) (6CFU)
bull (6CFU) AutoCad Mechanical Drawing standards
bull gt100 students
Page 4
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My visitshellip
bull 2000 Phd (3 years) in advanced production system at Dimeg
bull 2001 Fraunhofer IGDA2 Germany A2 (Prof Andre Stork)
bull 2002 CPIC Davis USA (Prof Bernd Hamman)
bull 2003 VRlab Transilvania University Romania (Prof Doru Talaba)
bull 2006 ICG Graz Austria (Prof Dieter Schmalstieg)
bull 2012 Heinz Nixdorf Institut Paderborn Germania
Page 5
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3lab Team
bull Giuseppe Monno (Prof Ord Disegno Industriale Director)
bull Antonio E Uva (Prof Ass Metodi Rapp Tecnica)
bull Michele Fiorentino (Researcher)
bull Saverio de Bernardis (PhD Student)
bull Ing Michele Gattullo (Collaborator)
bull gt20 ThesisYear
Location
DIMEG Via Japigia 182- 70100 BARI Italy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The lab
Virtual reality and Reality Reconstruction Lab (1999)
bull 20 x 18 m passive stereo screen
bull Art Dtrack 3D Tracking System
bull LiteEYE HMD
bull Reverse Engineering System (Scanprobe ST)
bull InputOutput devices
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3Lab research Emerging
Technologies for Engineering
Human Computer Interfaces
Natural Interface (ie Ipod)
Gesture recognition
Visualization
Micro-Large projection
Augmented reality
Tracking
Z-cam
Image processing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vision at VR3Lab
Advanced Desktop Collaborative Mobile
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Engineer of the future
SENSORS UBIQUTUS COMPUTERS
AR VISUALIZATION
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
VirtualAugmented
Reality Pillshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
My visitshellip
bull 2000 Phd (3 years) in advanced production system at Dimeg
bull 2001 Fraunhofer IGDA2 Germany A2 (Prof Andre Stork)
bull 2002 CPIC Davis USA (Prof Bernd Hamman)
bull 2003 VRlab Transilvania University Romania (Prof Doru Talaba)
bull 2006 ICG Graz Austria (Prof Dieter Schmalstieg)
bull 2012 Heinz Nixdorf Institut Paderborn Germania
Page 5
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3lab Team
bull Giuseppe Monno (Prof Ord Disegno Industriale Director)
bull Antonio E Uva (Prof Ass Metodi Rapp Tecnica)
bull Michele Fiorentino (Researcher)
bull Saverio de Bernardis (PhD Student)
bull Ing Michele Gattullo (Collaborator)
bull gt20 ThesisYear
Location
DIMEG Via Japigia 182- 70100 BARI Italy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The lab
Virtual reality and Reality Reconstruction Lab (1999)
bull 20 x 18 m passive stereo screen
bull Art Dtrack 3D Tracking System
bull LiteEYE HMD
bull Reverse Engineering System (Scanprobe ST)
bull InputOutput devices
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3Lab research Emerging
Technologies for Engineering
Human Computer Interfaces
Natural Interface (ie Ipod)
Gesture recognition
Visualization
Micro-Large projection
Augmented reality
Tracking
Z-cam
Image processing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vision at VR3Lab
Advanced Desktop Collaborative Mobile
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Engineer of the future
SENSORS UBIQUTUS COMPUTERS
AR VISUALIZATION
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
VirtualAugmented
Reality Pillshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3lab Team
bull Giuseppe Monno (Prof Ord Disegno Industriale Director)
bull Antonio E Uva (Prof Ass Metodi Rapp Tecnica)
bull Michele Fiorentino (Researcher)
bull Saverio de Bernardis (PhD Student)
bull Ing Michele Gattullo (Collaborator)
bull gt20 ThesisYear
Location
DIMEG Via Japigia 182- 70100 BARI Italy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The lab
Virtual reality and Reality Reconstruction Lab (1999)
bull 20 x 18 m passive stereo screen
bull Art Dtrack 3D Tracking System
bull LiteEYE HMD
bull Reverse Engineering System (Scanprobe ST)
bull InputOutput devices
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3Lab research Emerging
Technologies for Engineering
Human Computer Interfaces
Natural Interface (ie Ipod)
Gesture recognition
Visualization
Micro-Large projection
Augmented reality
Tracking
Z-cam
Image processing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vision at VR3Lab
Advanced Desktop Collaborative Mobile
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Engineer of the future
SENSORS UBIQUTUS COMPUTERS
AR VISUALIZATION
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
VirtualAugmented
Reality Pillshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
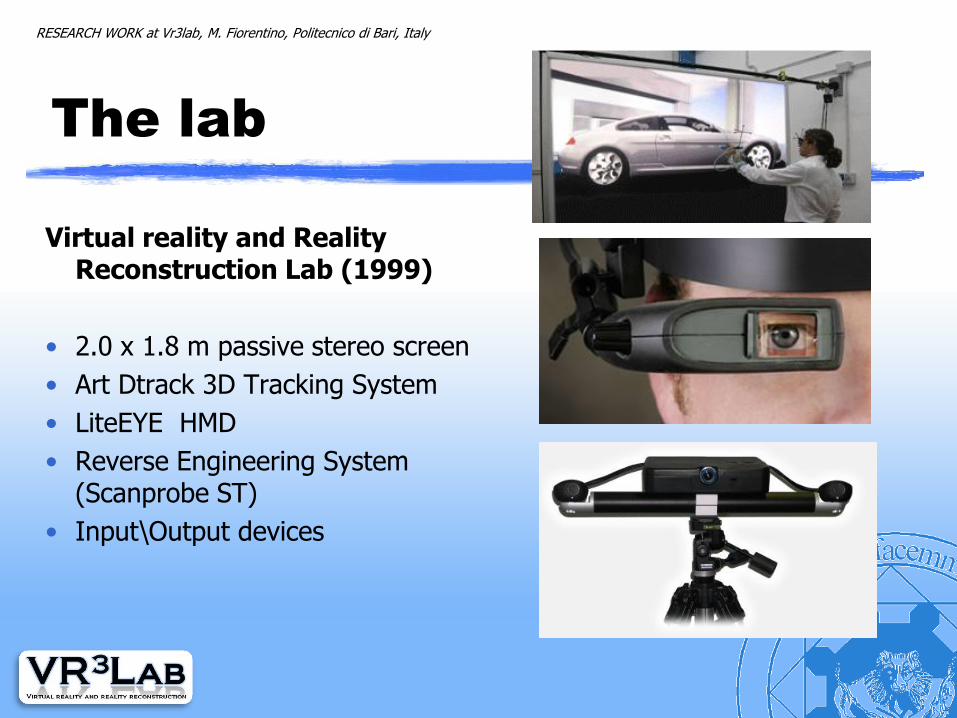
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The lab
Virtual reality and Reality Reconstruction Lab (1999)
bull 20 x 18 m passive stereo screen
bull Art Dtrack 3D Tracking System
bull LiteEYE HMD
bull Reverse Engineering System (Scanprobe ST)
bull InputOutput devices
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3Lab research Emerging
Technologies for Engineering
Human Computer Interfaces
Natural Interface (ie Ipod)
Gesture recognition
Visualization
Micro-Large projection
Augmented reality
Tracking
Z-cam
Image processing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vision at VR3Lab
Advanced Desktop Collaborative Mobile
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Engineer of the future
SENSORS UBIQUTUS COMPUTERS
AR VISUALIZATION
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
VirtualAugmented
Reality Pillshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
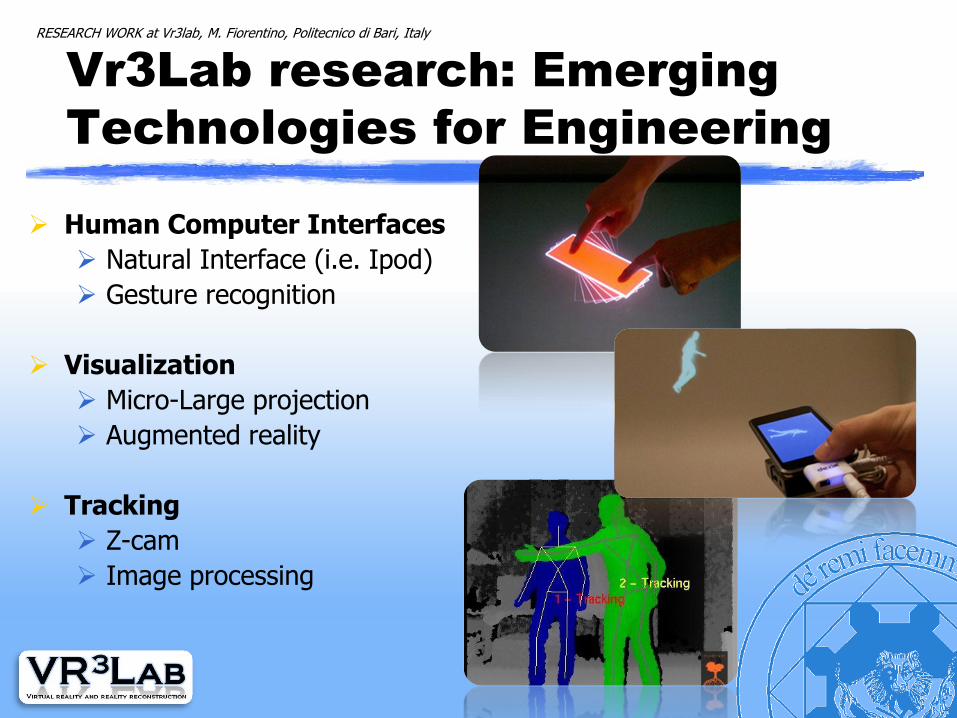
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vr3Lab research Emerging
Technologies for Engineering
Human Computer Interfaces
Natural Interface (ie Ipod)
Gesture recognition
Visualization
Micro-Large projection
Augmented reality
Tracking
Z-cam
Image processing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vision at VR3Lab
Advanced Desktop Collaborative Mobile
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Engineer of the future
SENSORS UBIQUTUS COMPUTERS
AR VISUALIZATION
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
VirtualAugmented
Reality Pillshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
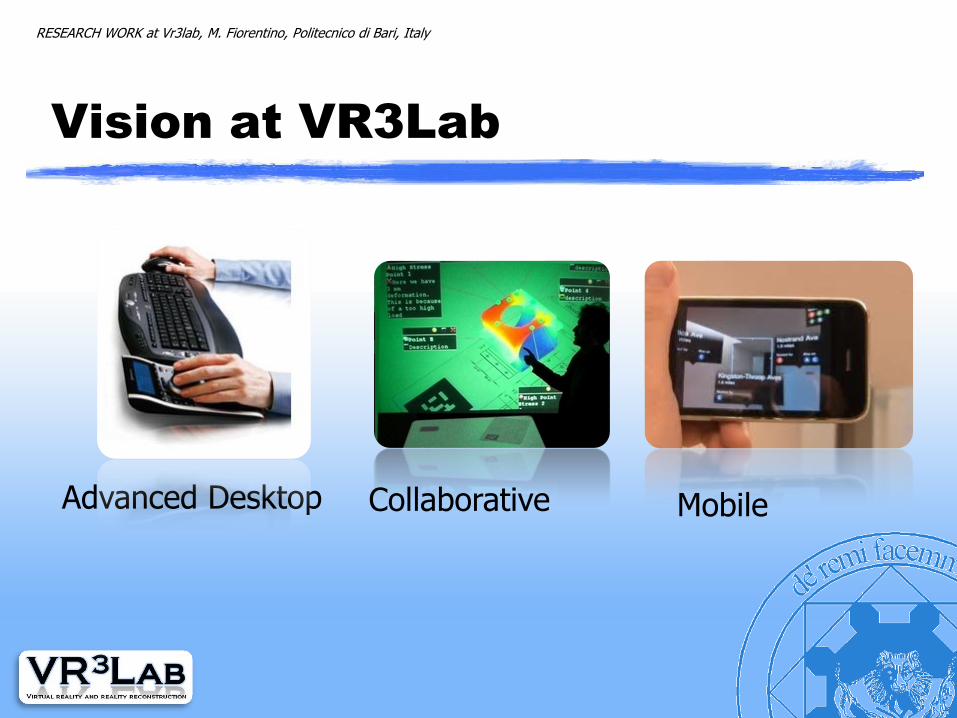
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Vision at VR3Lab
Advanced Desktop Collaborative Mobile
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Engineer of the future
SENSORS UBIQUTUS COMPUTERS
AR VISUALIZATION
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
VirtualAugmented
Reality Pillshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
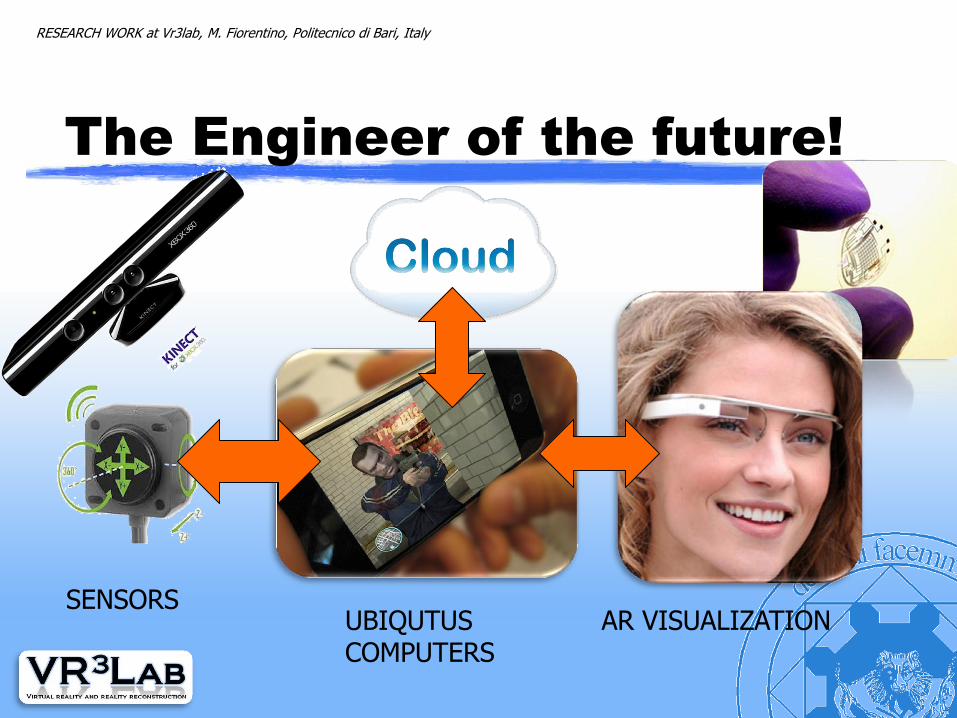
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Engineer of the future
SENSORS UBIQUTUS COMPUTERS
AR VISUALIZATION
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
VirtualAugmented
Reality Pillshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
VirtualAugmented
Reality Pillshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Key Elements of VR
Compared to computer graphics
1 Fully Sensory feedback visualauralhaptic feedback to participants -gt Immersion (physical) and presence (subjective)
2 Interactivity real time response participants are able to move around and change their viewpoint generally through movements of their head
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
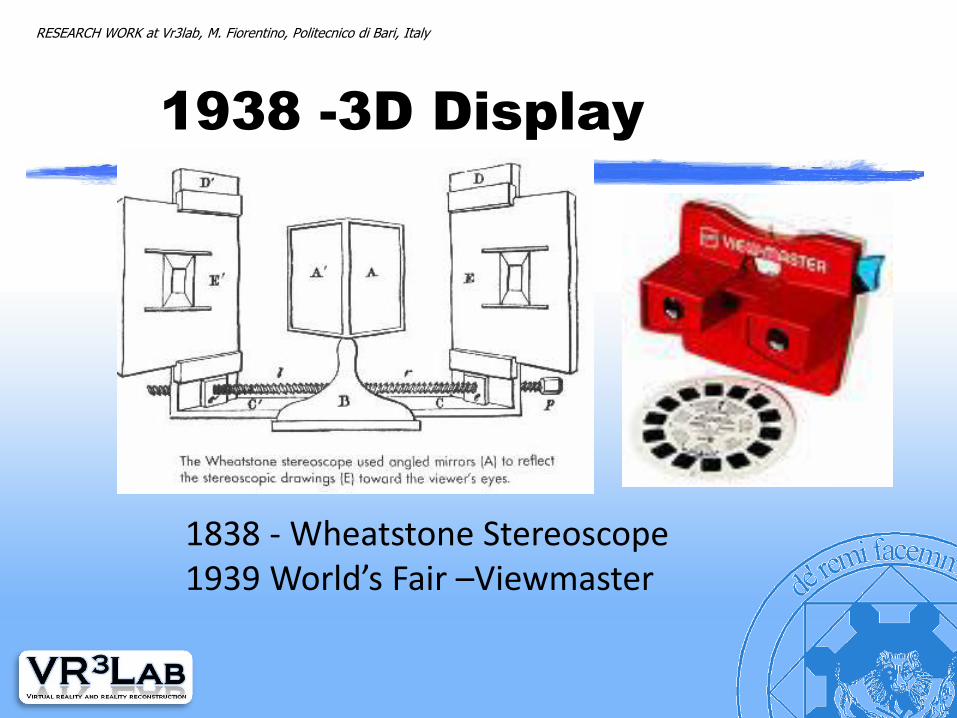
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1938 -3D Display
1838 - Wheatstone Stereoscope 1939 Worldrsquos Fair ndashViewmaster
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
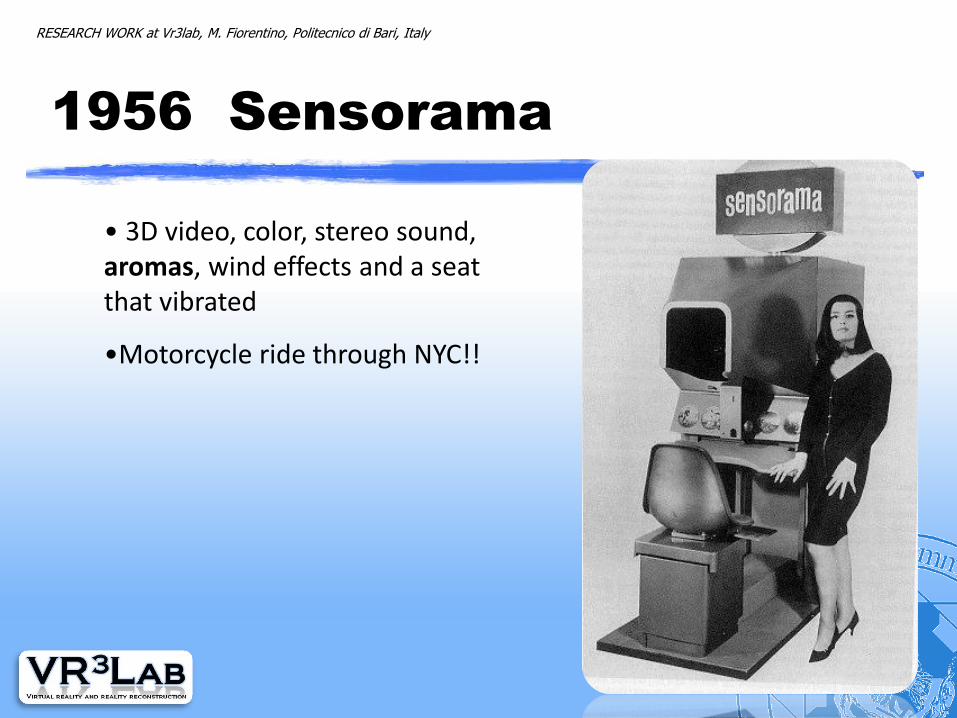
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1956 Sensorama
bull 3D video color stereo sound aromas wind effects and a seat that vibrated
bullMotorcycle ride through NYC
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
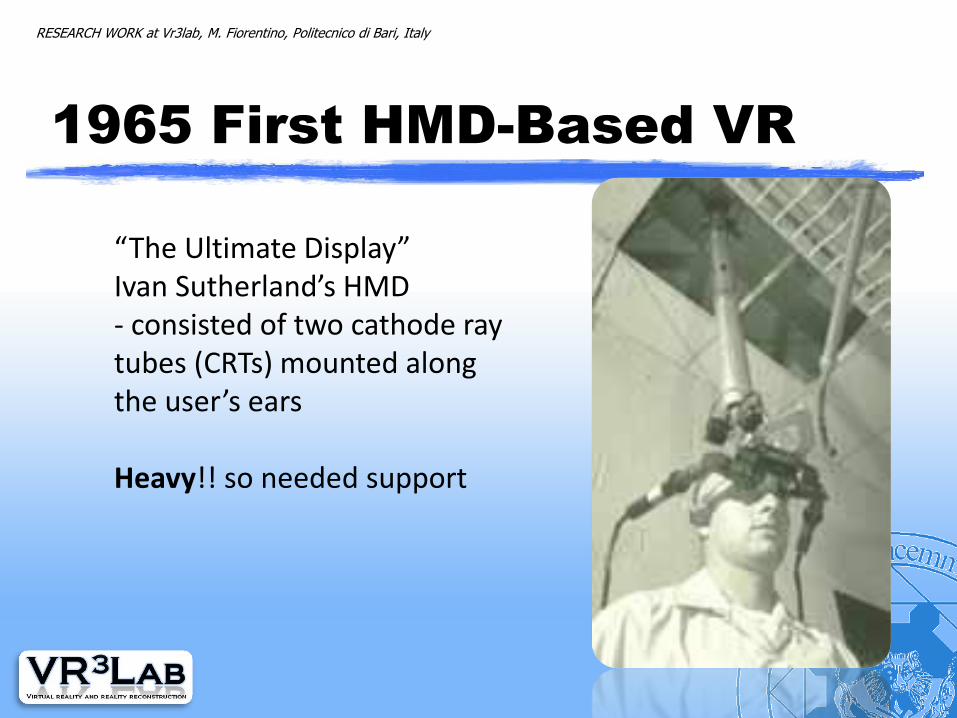
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1965 First HMD-Based VR
ldquoThe Ultimate Displayrdquo Ivan Sutherlandrsquos HMD - consisted of two cathode ray tubes (CRTs) mounted along the userrsquos ears Heavy so needed support
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
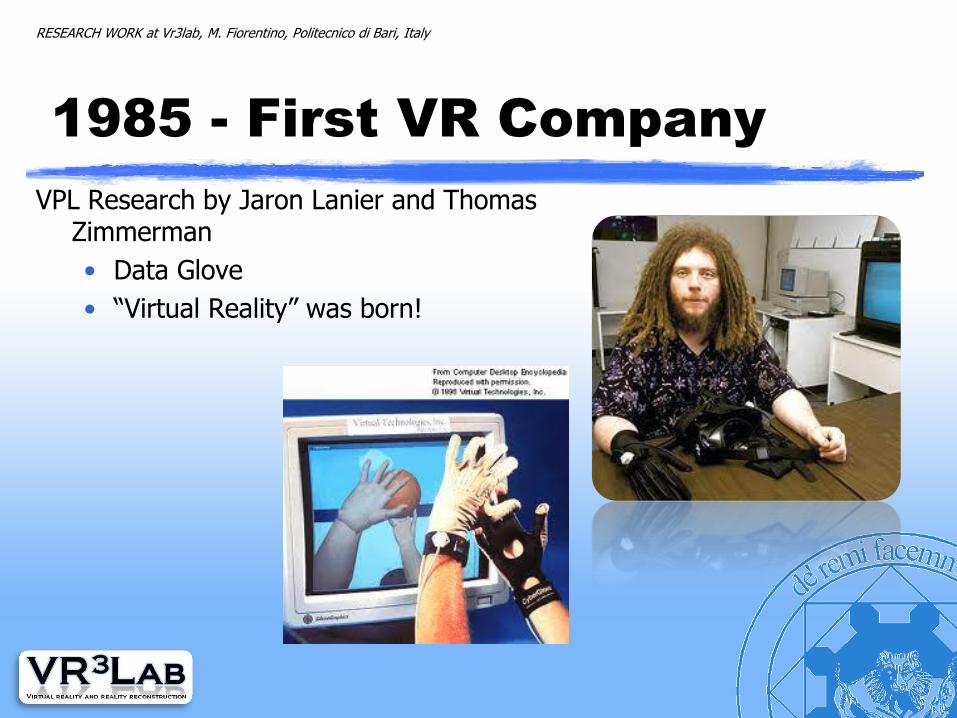
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - First VR Company
VPL Research by Jaron Lanier and Thomas Zimmerman
bull Data Glove
bull ldquoVirtual Realityrdquo was born
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
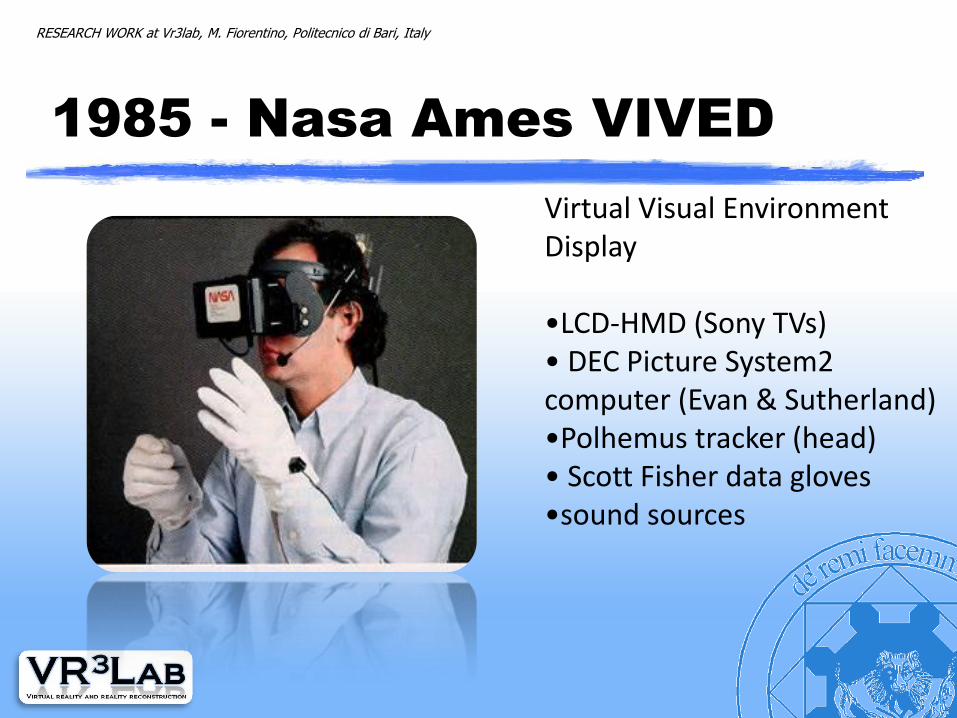
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1985 - Nasa Ames VIVED
Virtual Visual Environment Display
bullLCD-HMD (Sony TVs) bull DEC Picture System2 computer (Evan amp Sutherland) bullPolhemus tracker (head) bull Scott Fisher data gloves bullsound sources
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
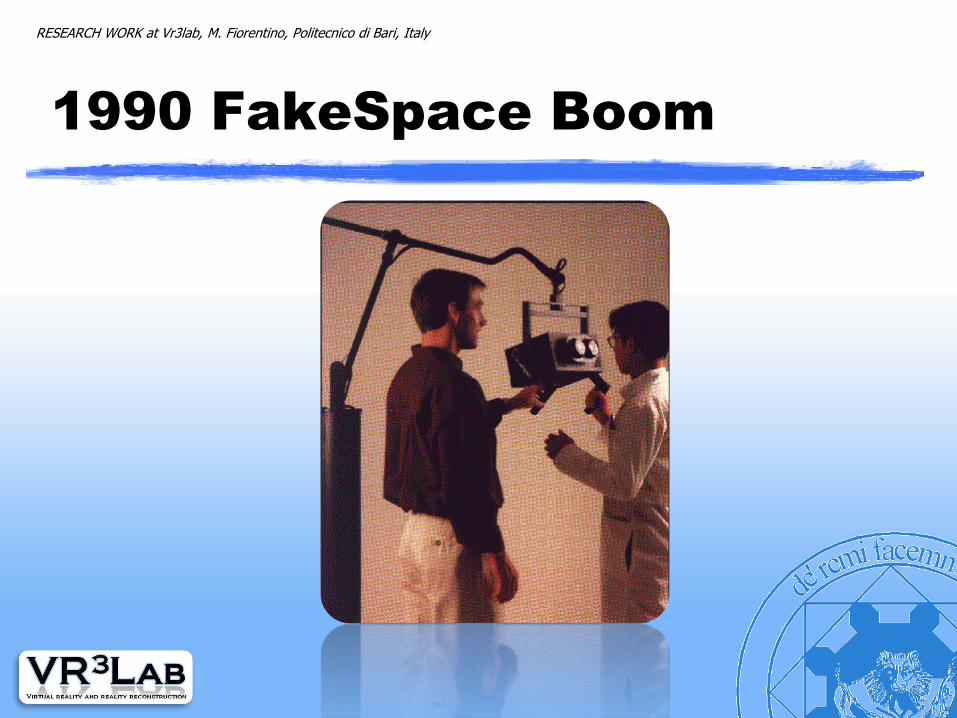
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1990 FakeSpace Boom
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
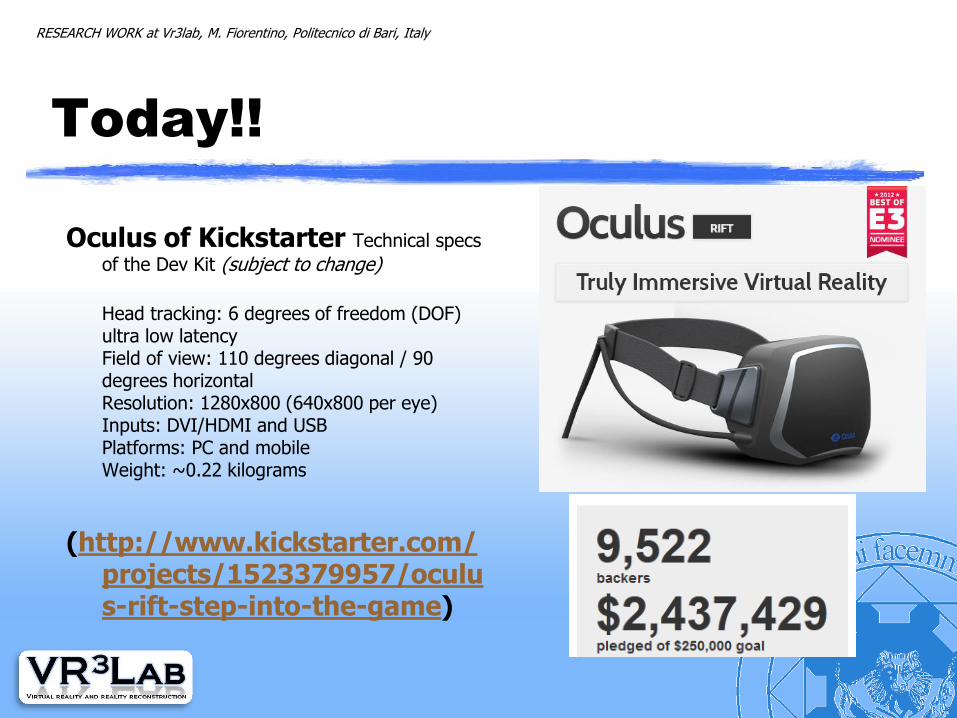
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Today
Oculus of Kickstarter Technical specs
of the Dev Kit (subject to change)
Head tracking 6 degrees of freedom (DOF) ultra low latency Field of view 110 degrees diagonal 90 degrees horizontal Resolution 1280x800 (640x800 per eye) Inputs DVIHDMI and USB Platforms PC and mobile Weight ~022 kilograms
(httpwwwkickstartercomprojects1523379957oculus-rift-step-into-the-game)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
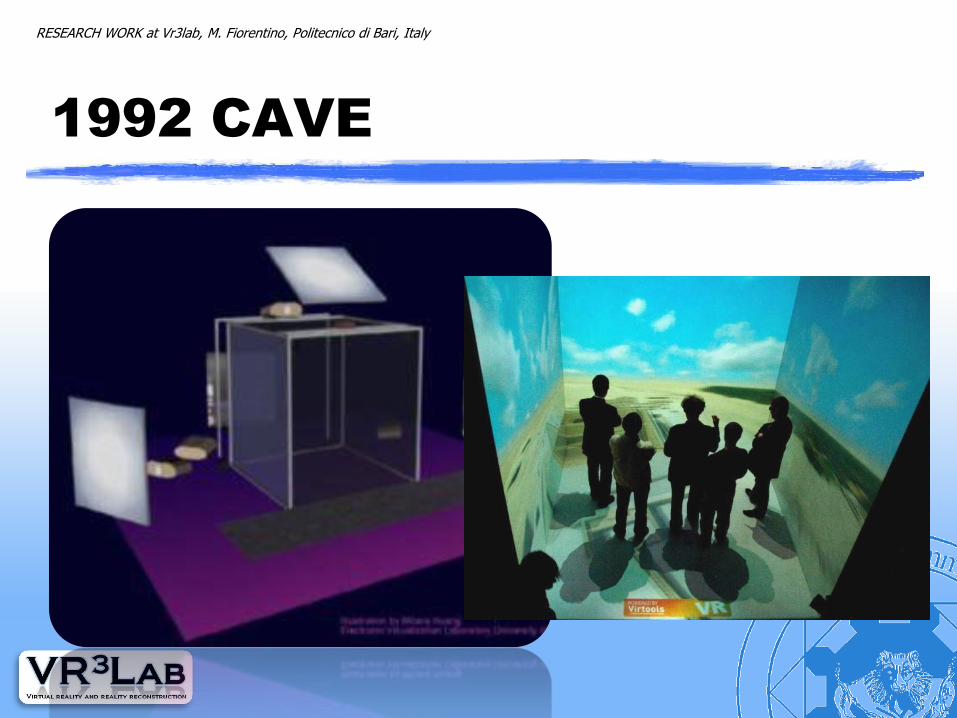
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 CAVE
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
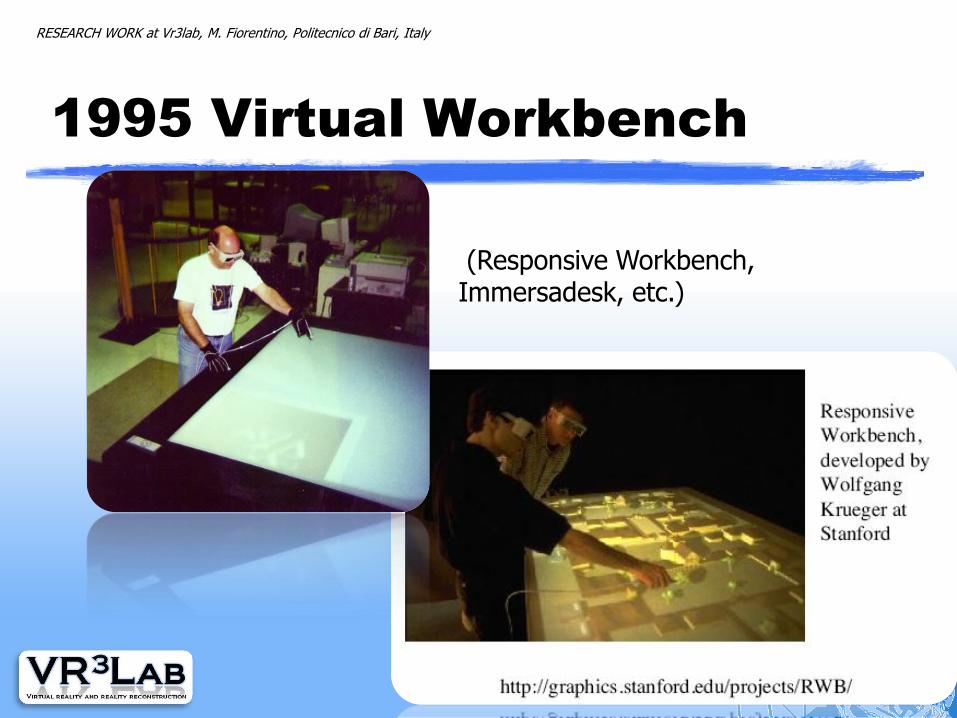
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1995 Virtual Workbench
(Responsive Workbench Immersadesk etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
How immerse
How is it possible to simulate walking
hellip 2 crazy examples
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
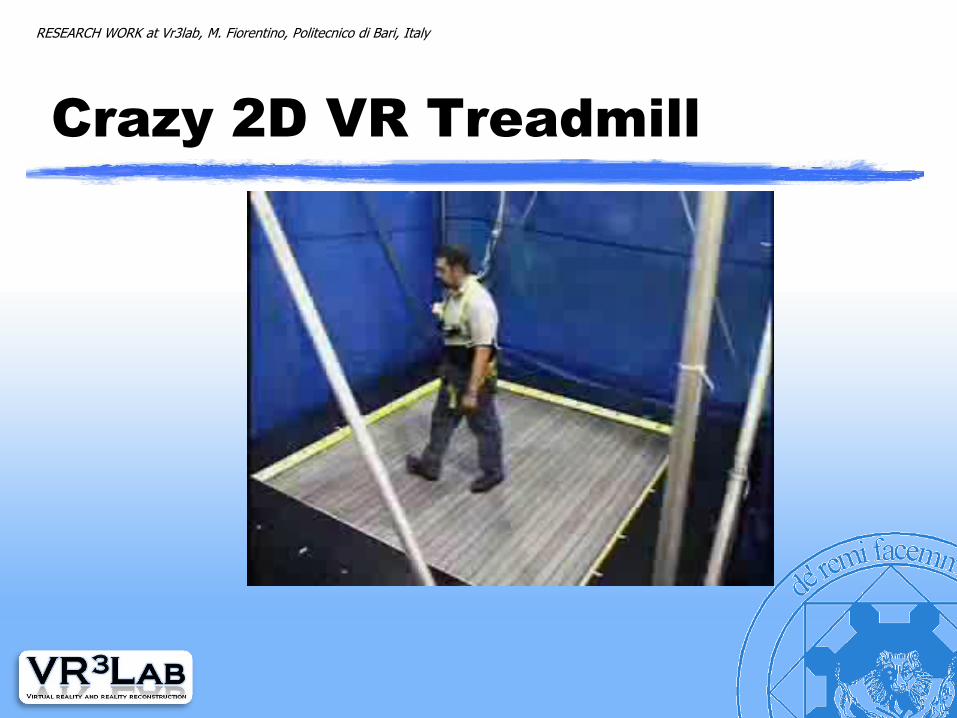
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Crazy 2D VR Treadmill
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
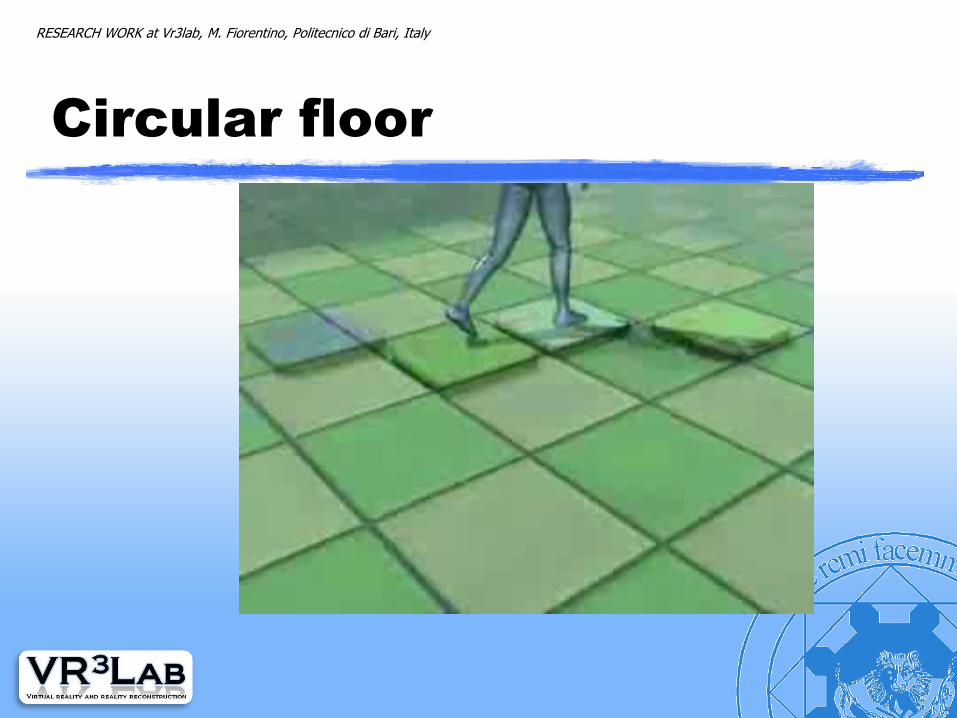
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Circular floor
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
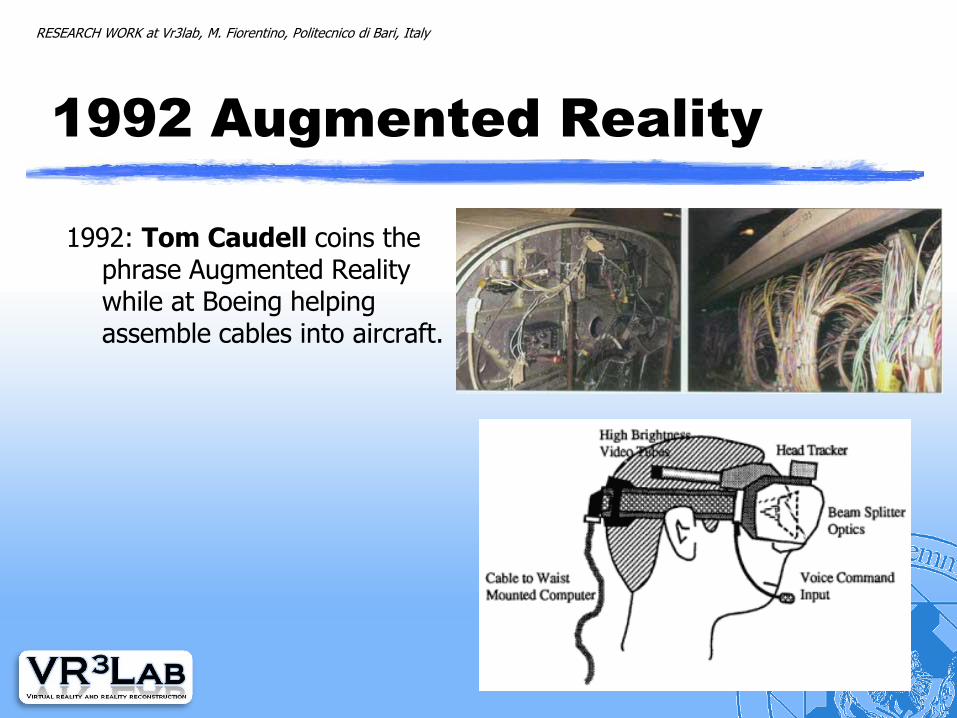
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 Augmented Reality
1992 Tom Caudell coins the phrase Augmented Reality while at Boeing helping assemble cables into aircraft
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR vs VR
Augmented Reality
bullaugments the real world scene
bullUser maintains a sense of presence in real world
bullNeeds a mechanism to combine virtual and real worlds
Virtual Reality
bullTotally immersive environment
bullVisual senses are under control
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
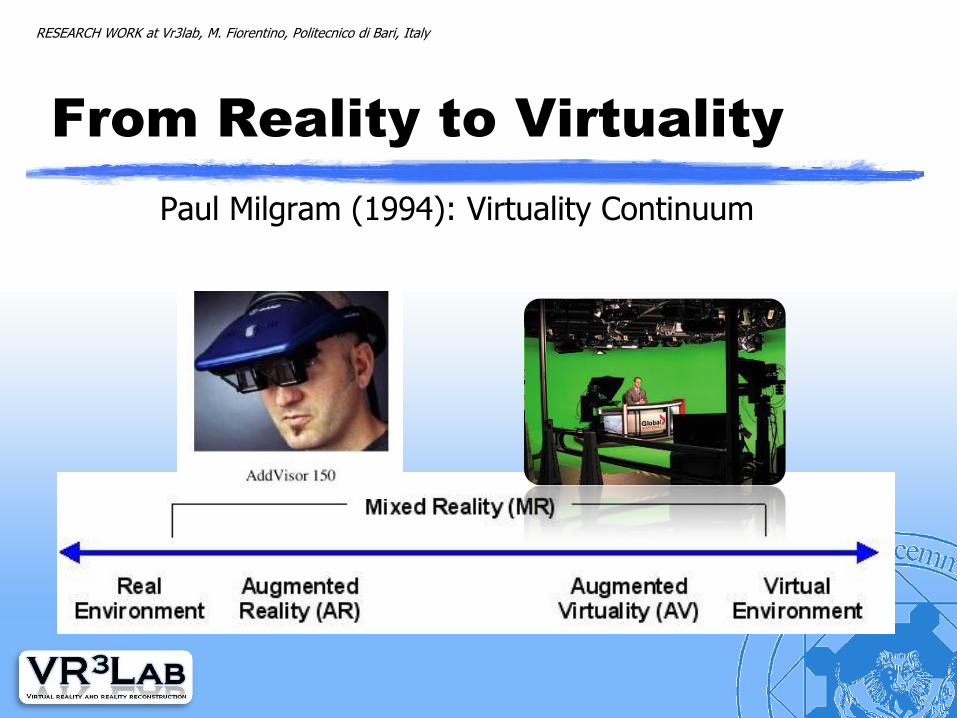
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
From Reality to Virtuality
Paul Milgram (1994) Virtuality Continuum
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
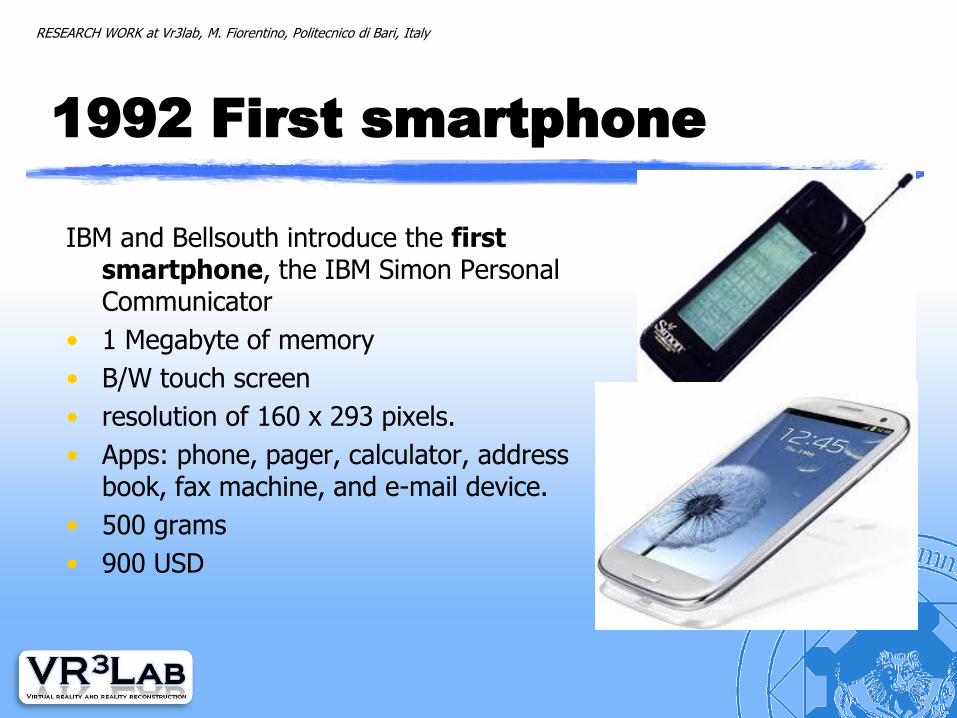
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1992 First smartphone
IBM and Bellsouth introduce the first smartphone the IBM Simon Personal Communicator
bull 1 Megabyte of memory
bull BW touch screen
bull resolution of 160 x 293 pixels
bull Apps phone pager calculator address book fax machine and e-mail device
bull 500 grams
bull 900 USD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
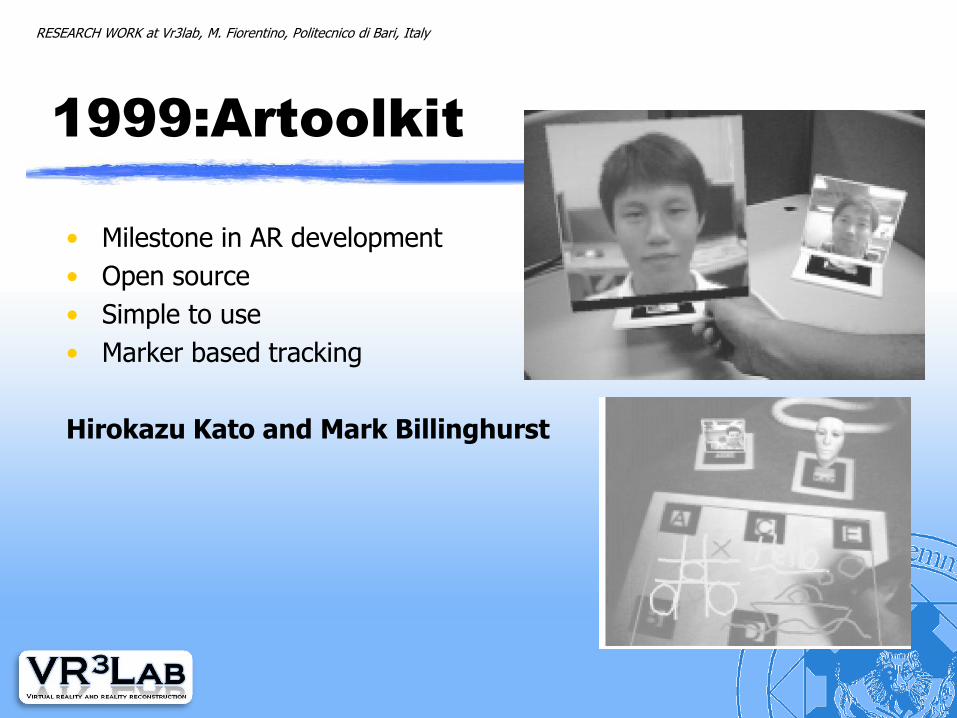
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999Artoolkit
bull Milestone in AR development
bull Open source
bull Simple to use
bull Marker based tracking
Hirokazu Kato and Mark Billinghurst
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
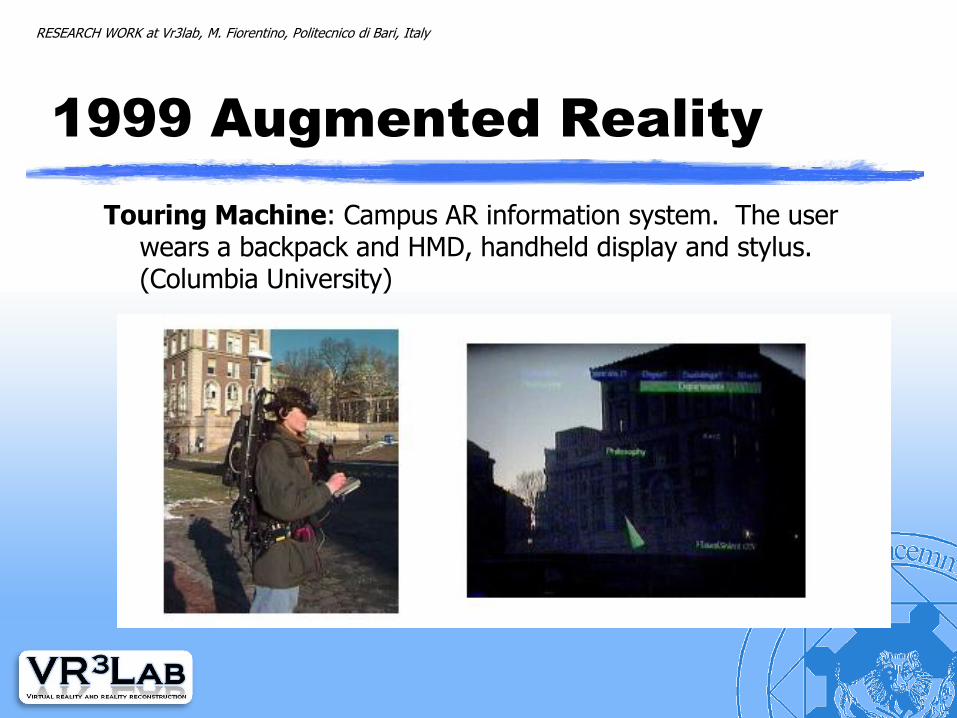
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Augmented Reality
Touring Machine Campus AR information system The user wears a backpack and HMD handheld display and stylus (Columbia University)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
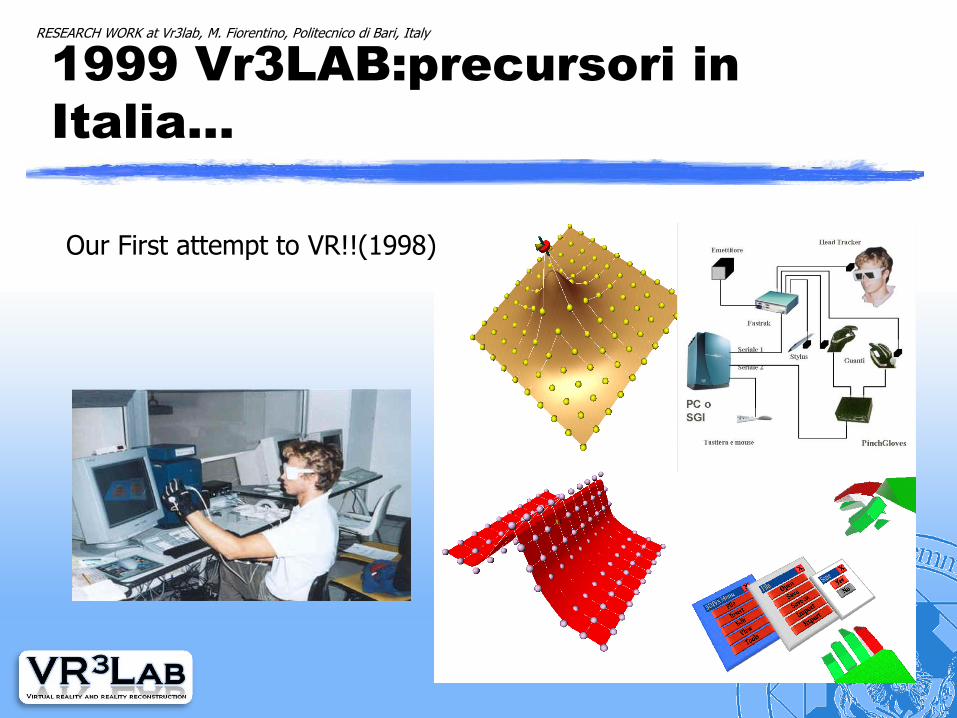
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1999 Vr3LABprecursori in
Italiahellip
Our First attempt to VR(1998)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we learned in 1999
Pro
bull People like 3D
bull People like stereo
bull Easy of use
Cons
bull People donrsquot like gloves
bull Cables
bull Polhemus precision
bull 3D menusgloves=not easy to use
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
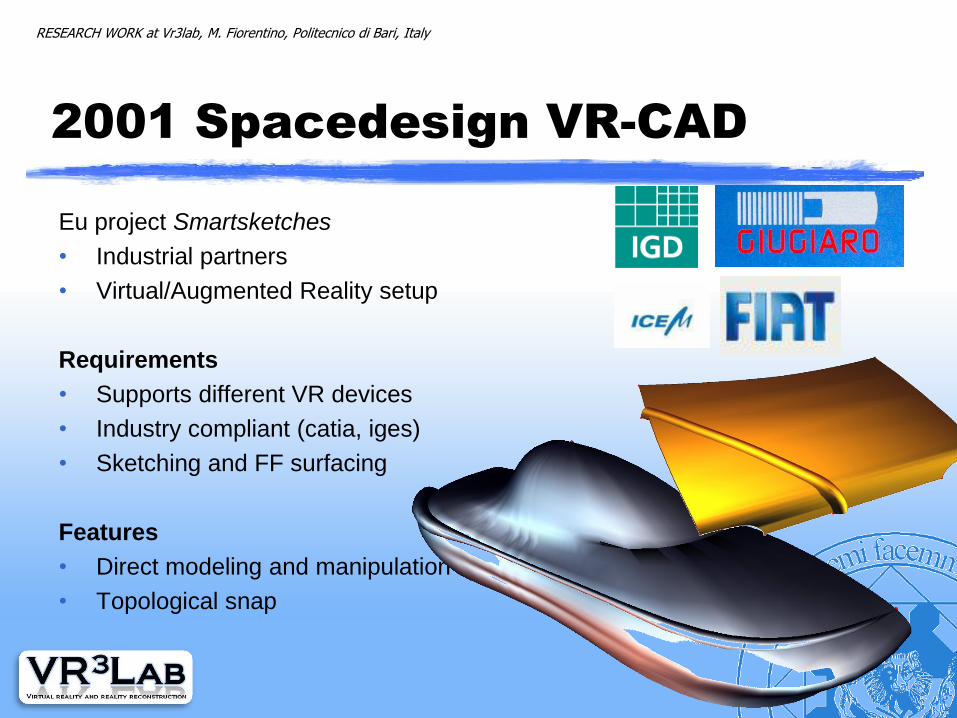
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2001 Spacedesign VR-CAD
Eu project Smartsketches
bull Industrial partners
bull VirtualAugmented Reality setup
Requirements
bull Supports different VR devices
bull Industry compliant (catia iges)
bull Sketching and FF surfacing
Features
bull Direct modeling and manipulation
bull Topological snap
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
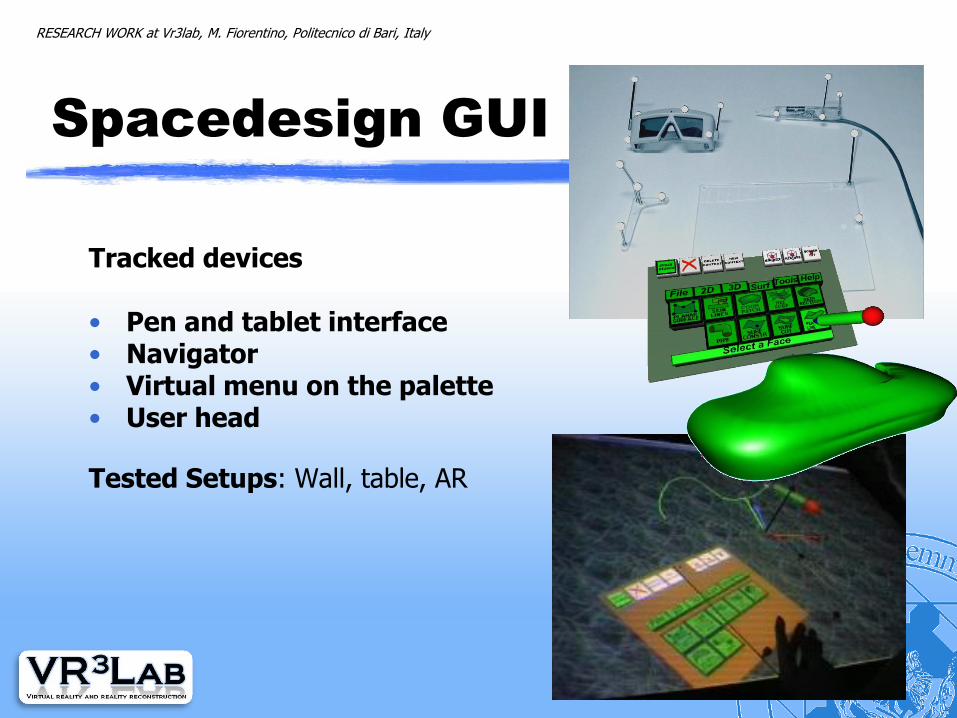
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spacedesign GUI
Tracked devices bull Pen and tablet interface bull Navigator bull Virtual menu on the palette bull User head
Tested Setups Wall table AR
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
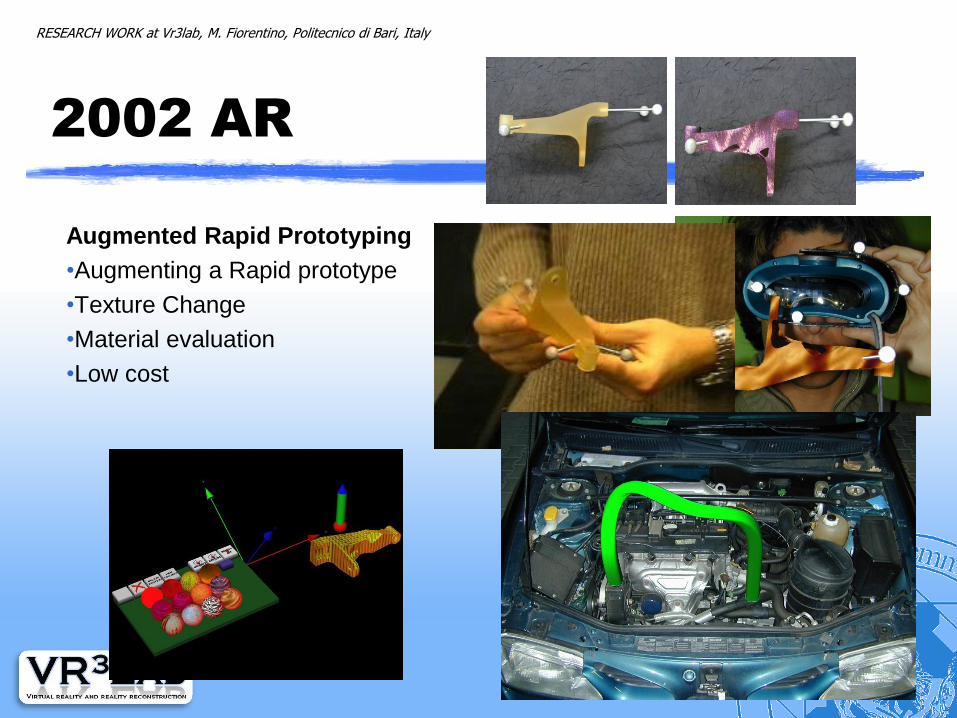
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2002 AR
Augmented Rapid Prototyping
bullAugmenting a Rapid prototype
bullTexture Change
bullMaterial evaluation
bullLow cost
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
AR in medicine(video)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
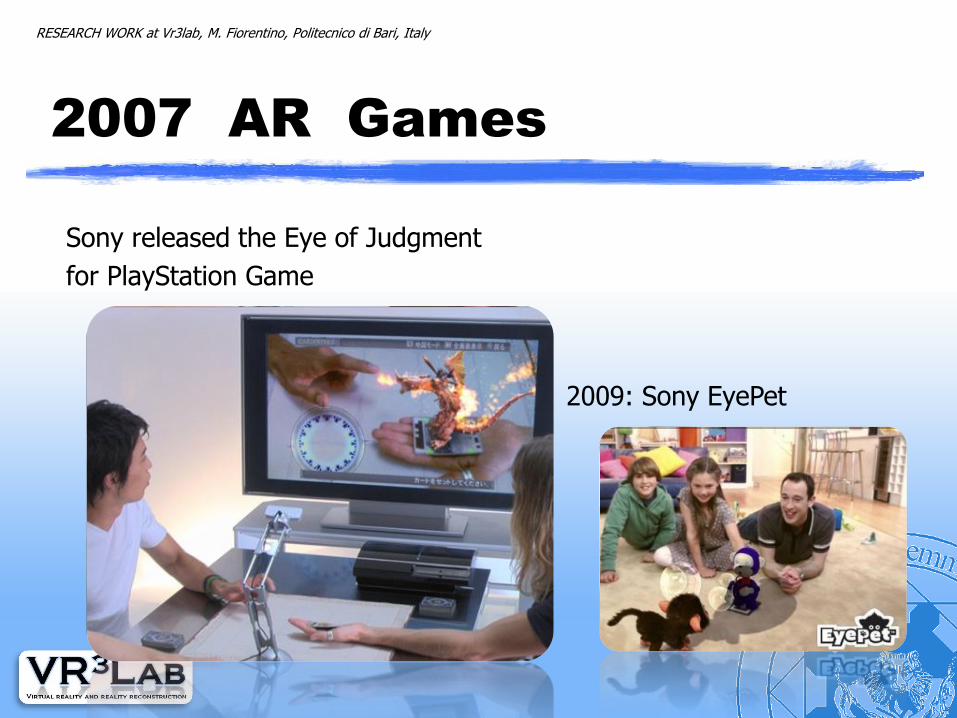
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2007 AR Games
Sony released the Eye of Judgment
for PlayStation Game
2009 Sony EyePet
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
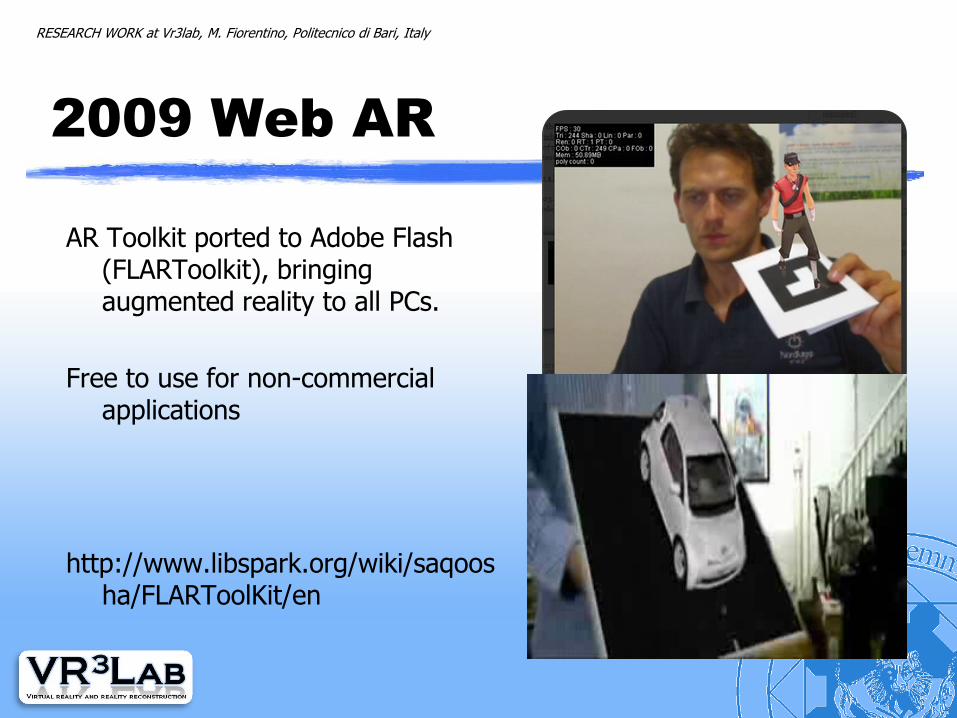
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
2009 Web AR
AR Toolkit ported to Adobe Flash (FLARToolkit) bringing augmented reality to all PCs
Free to use for non-commercial applications
httpwwwlibsparkorgwikisaqooshaFLARToolKiten
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
M Fiorentino Politecnico di Bari
wwwvr3labit
MR Technologies
1 Visualization
2 Tracking
3 User Interfaces
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
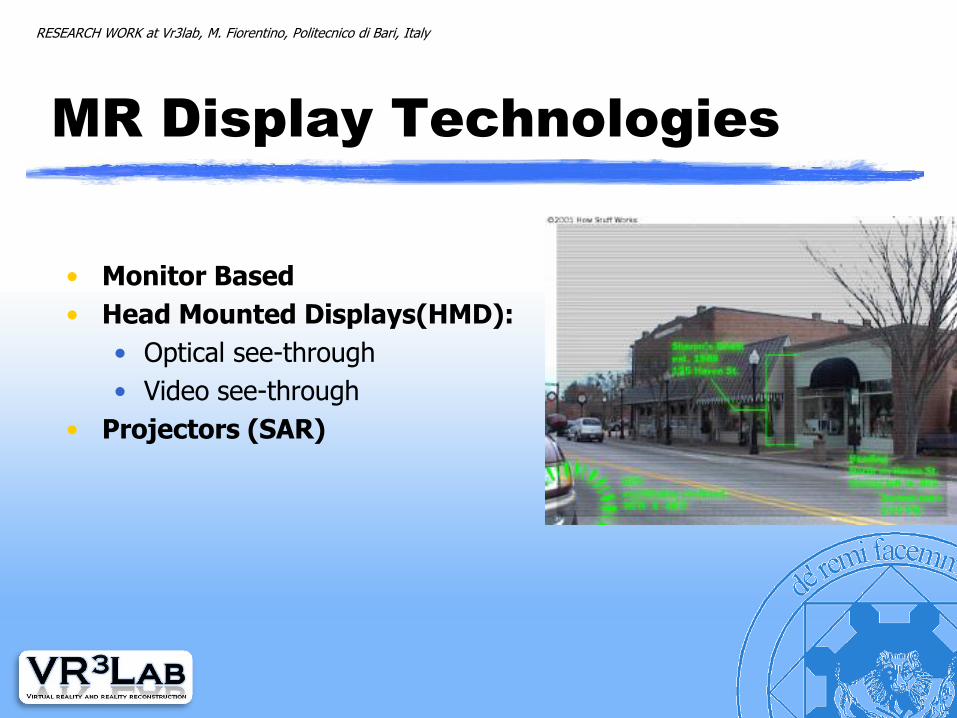
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
MR Display Technologies
bull Monitor Based
bull Head Mounted Displays(HMD)
bull Optical see-through
bull Video see-through
bull Projectors (SAR)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
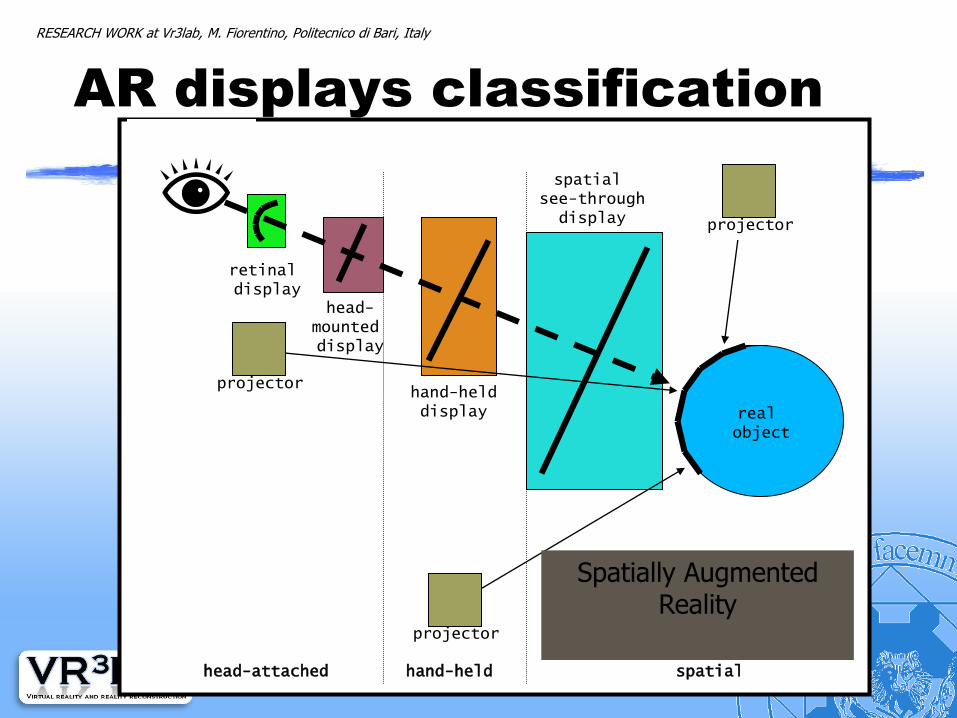
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
hand-held display
spatial see-through
display
head- mounted display
retinal display
head-attached hand-held spatial
projector
projector
projector
real object
Spatially Augmented Reality
AR displays classification
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
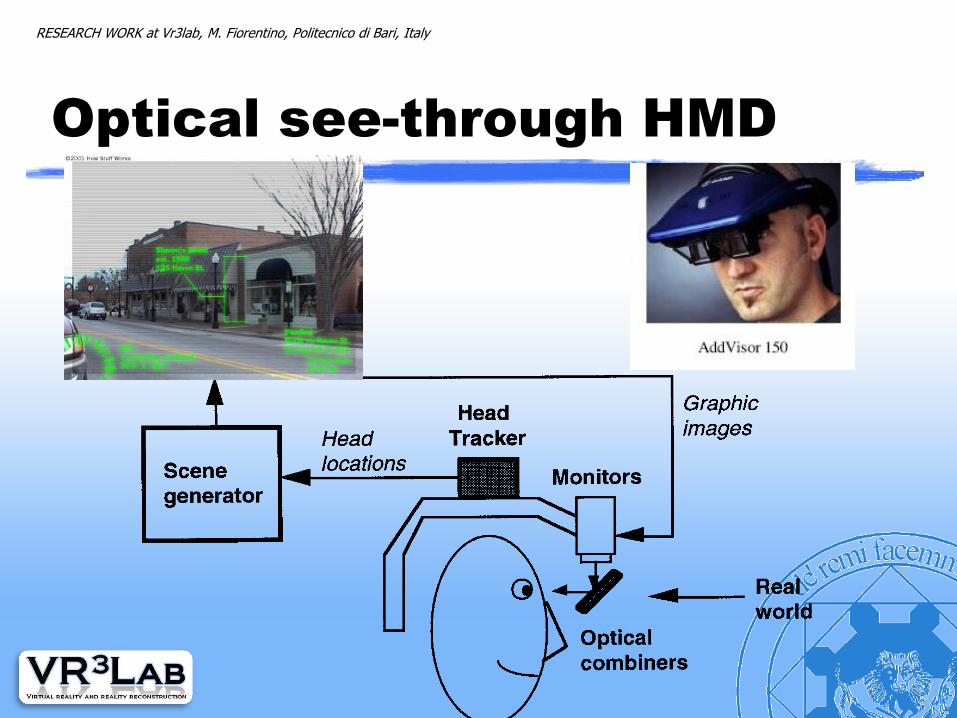
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
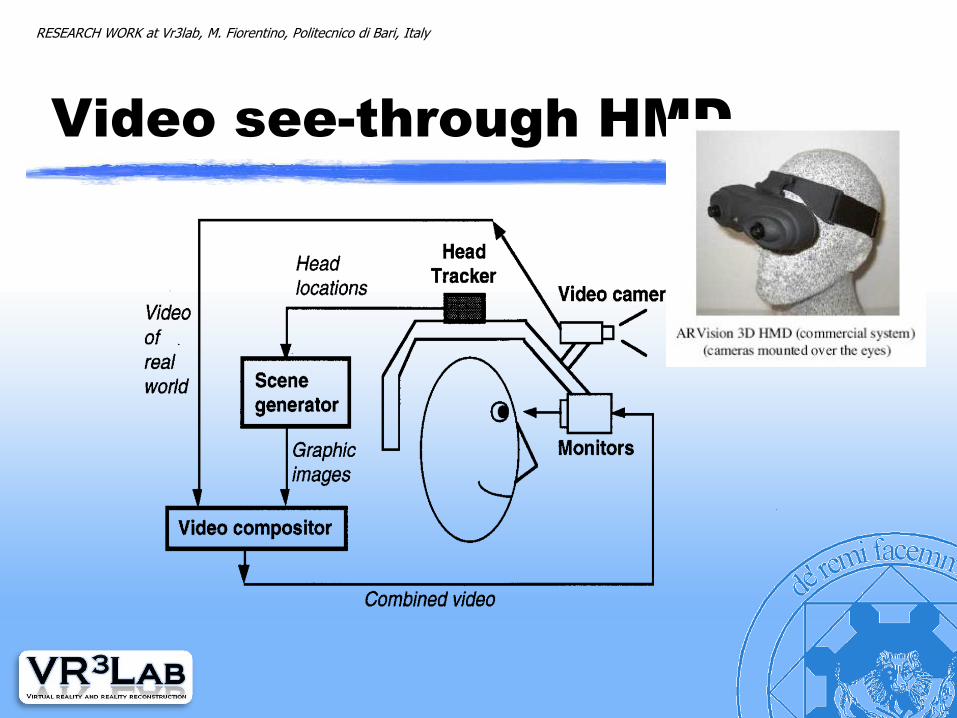
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Video see-through HMD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
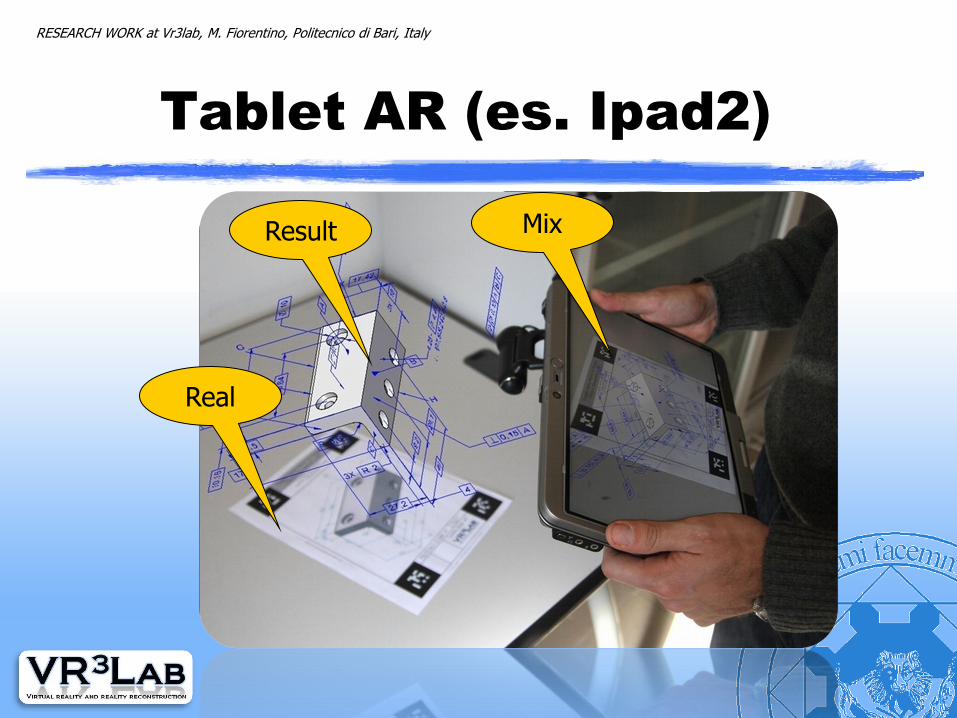
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tablet AR (es Ipad2)
Real
Result Mix
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
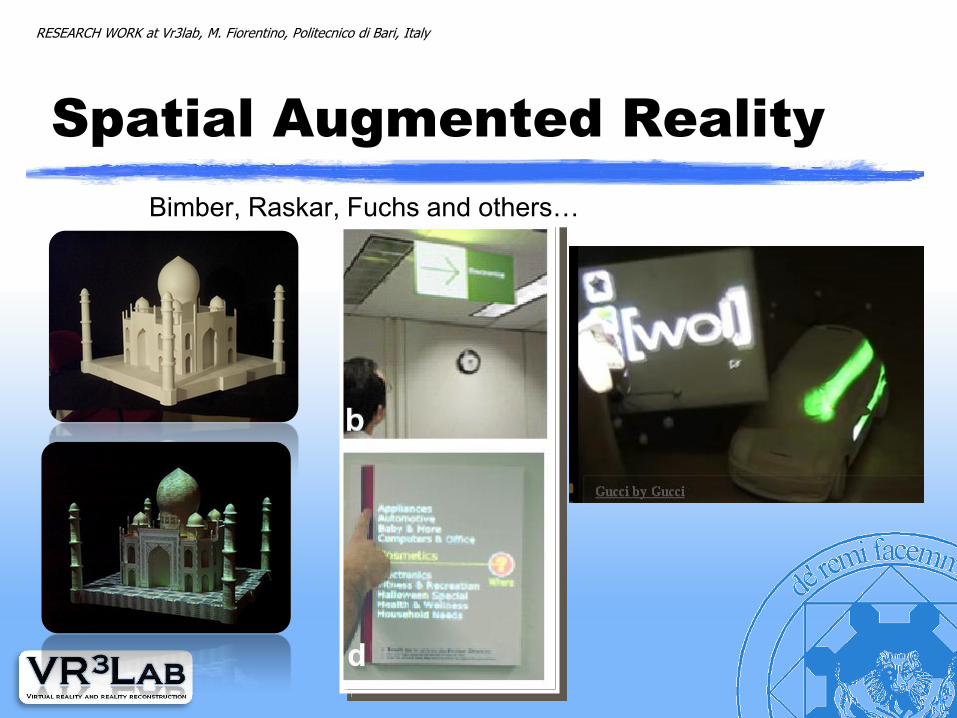
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Spatial Augmented Reality
Bimber Raskar Fuchs and othershellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
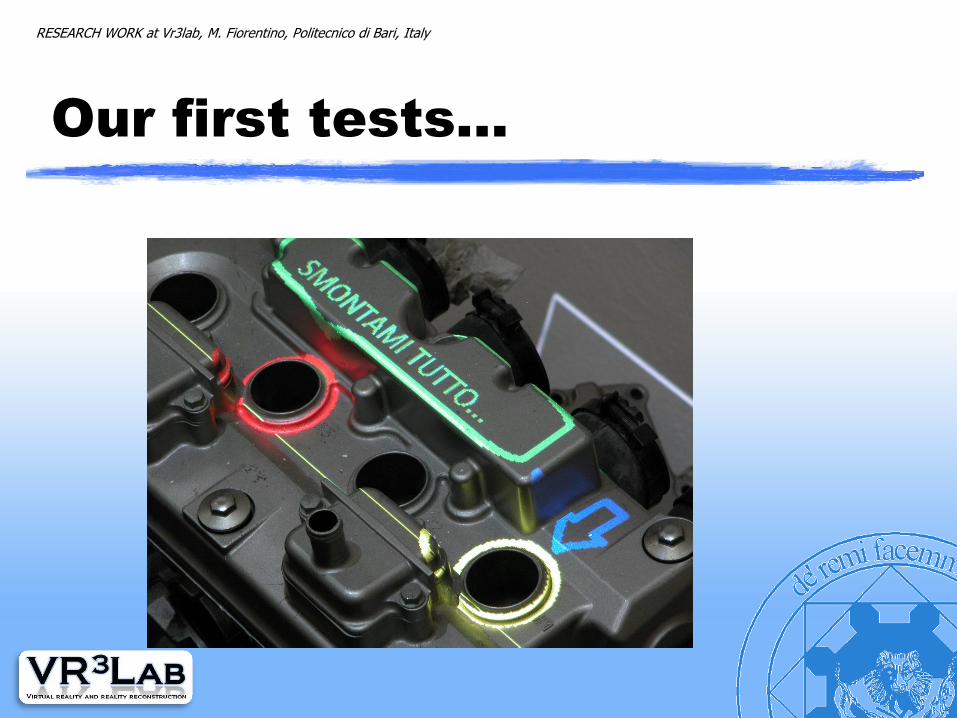
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our first testshellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
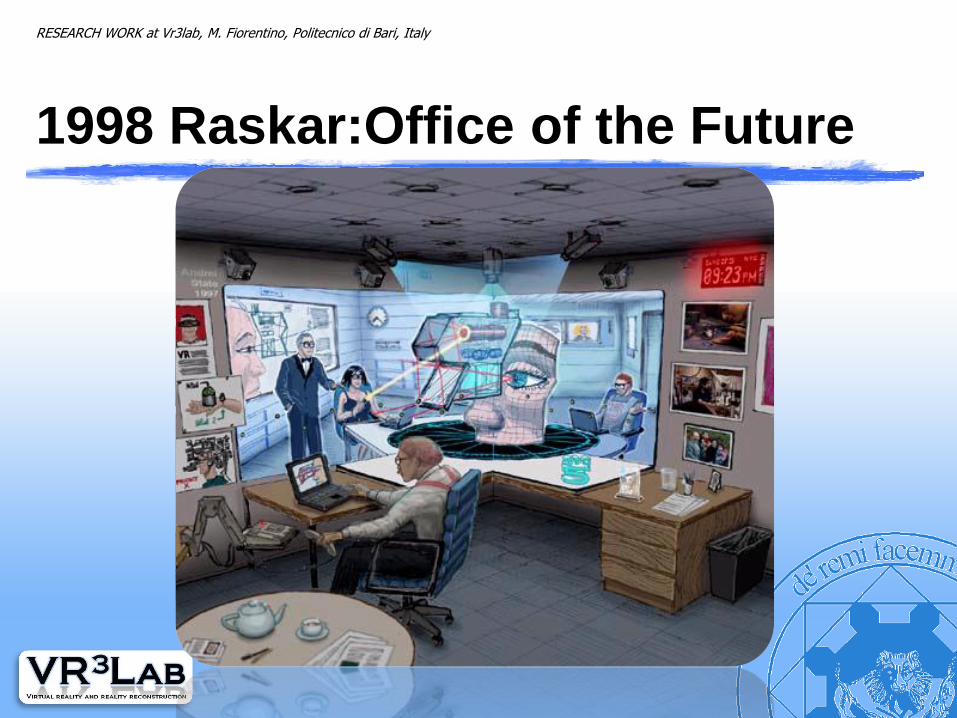
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
1998 RaskarOffice of the Future
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
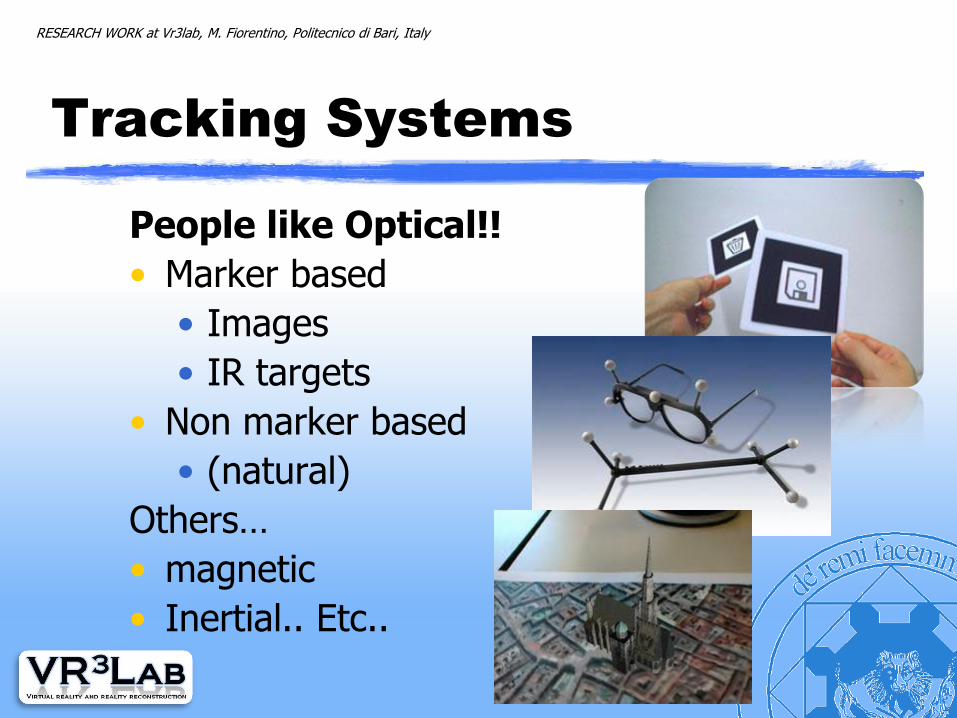
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracking Systems
People like Optical
bull Marker based
bull Images
bull IR targets
bull Non marker based
bull (natural)
Othershellip
bull magnetic
bull Inertial Etc
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
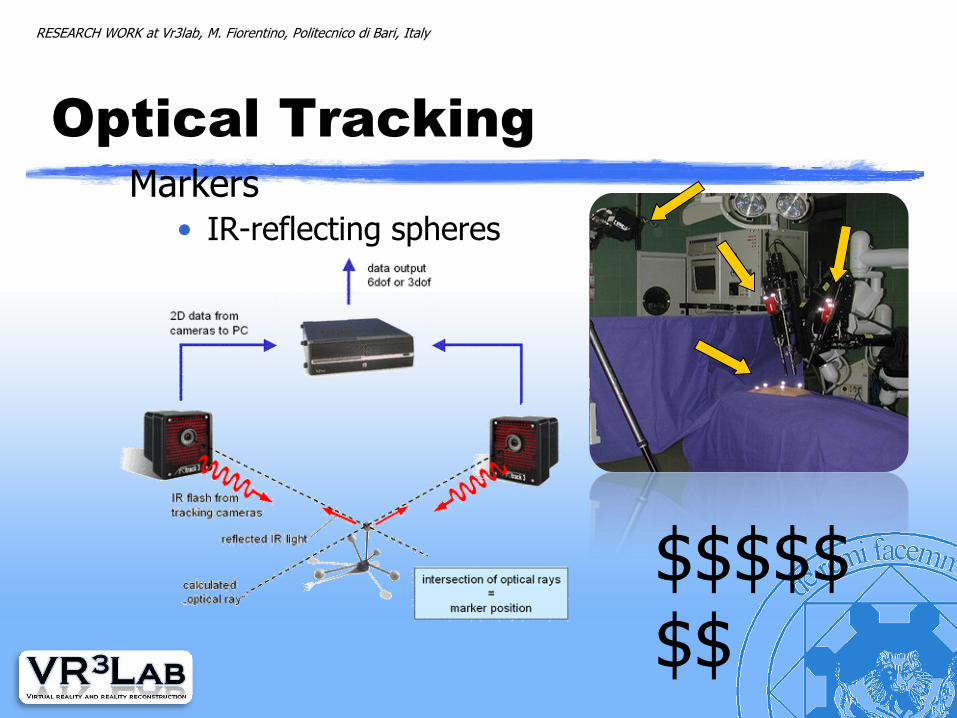
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Optical Tracking
Markers bull IR-reflecting spheres
$$$$$$$
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
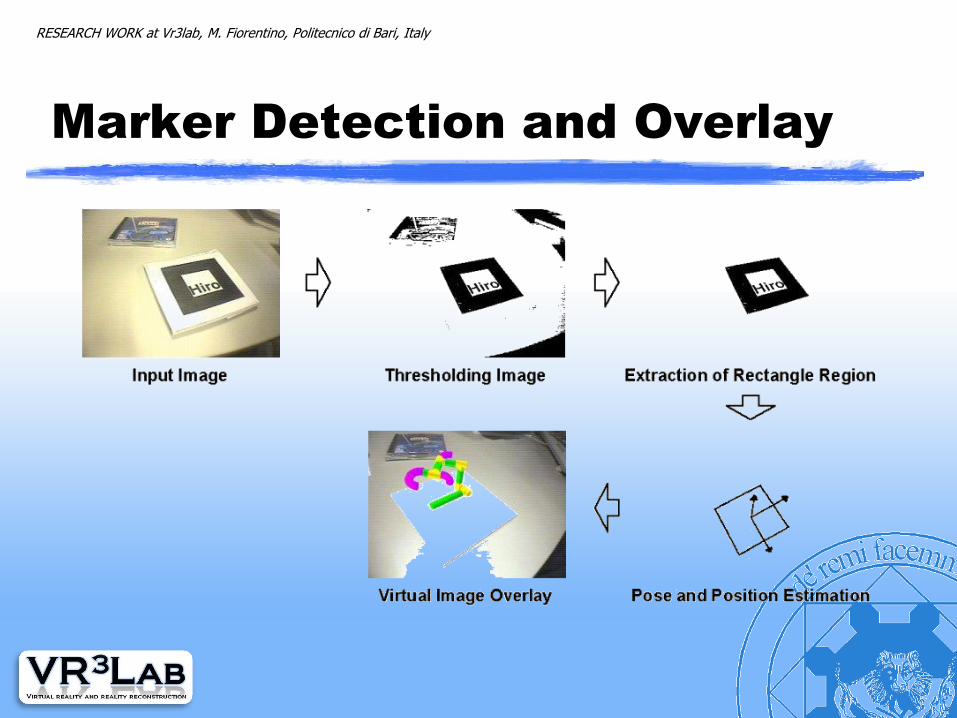
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Marker Detection and Overlay
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
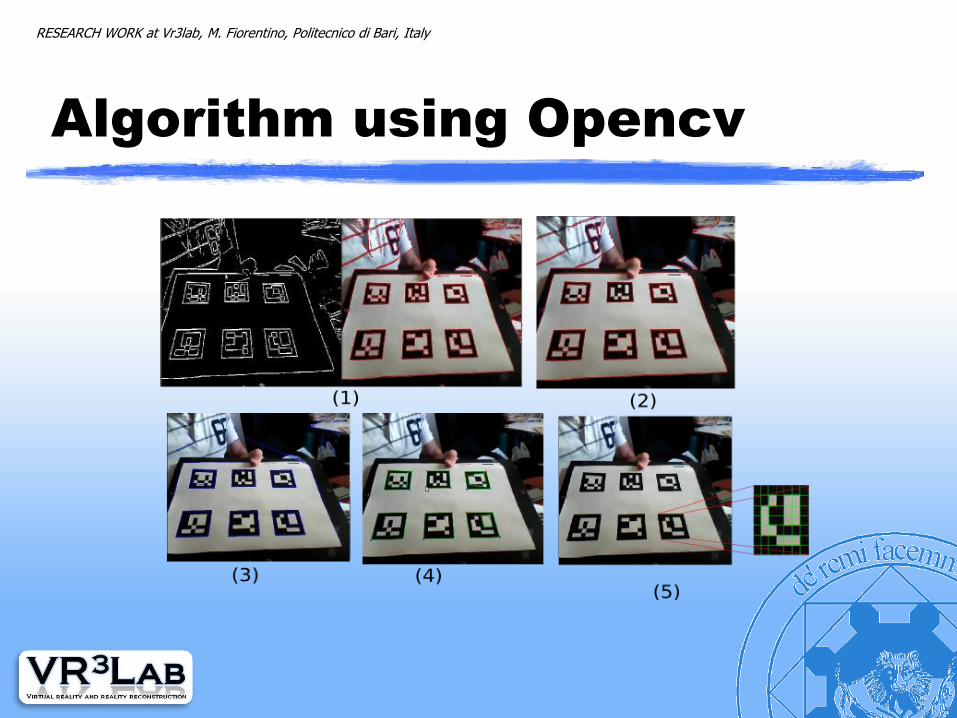
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Algorithm using Opencv
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS

RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Multi marker
Different scale
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS

RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What we use nowhellip
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
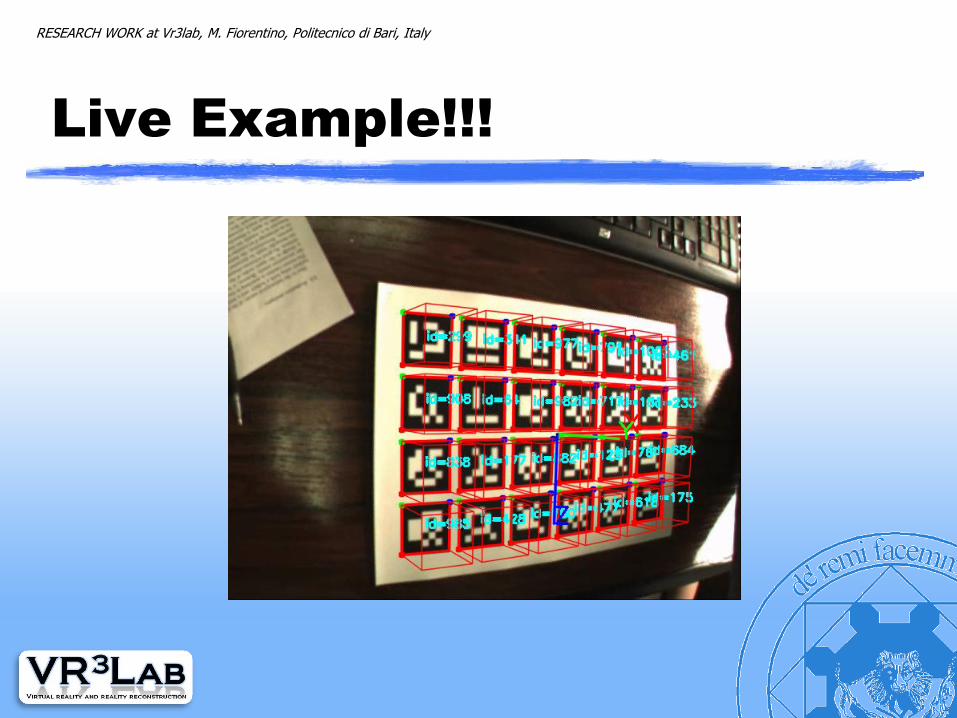
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Live Example
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
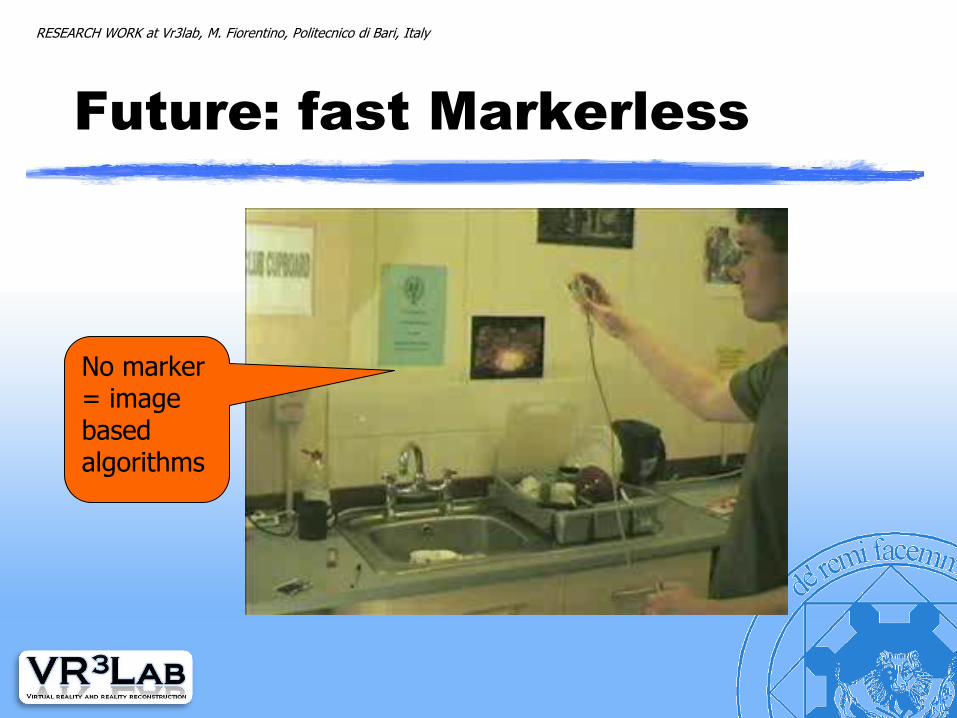
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Future fast Markerless
No marker = image based algorithms
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
User Interfaces
bull Visual
bull Tangible
bull Haptic
bull Gestures
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
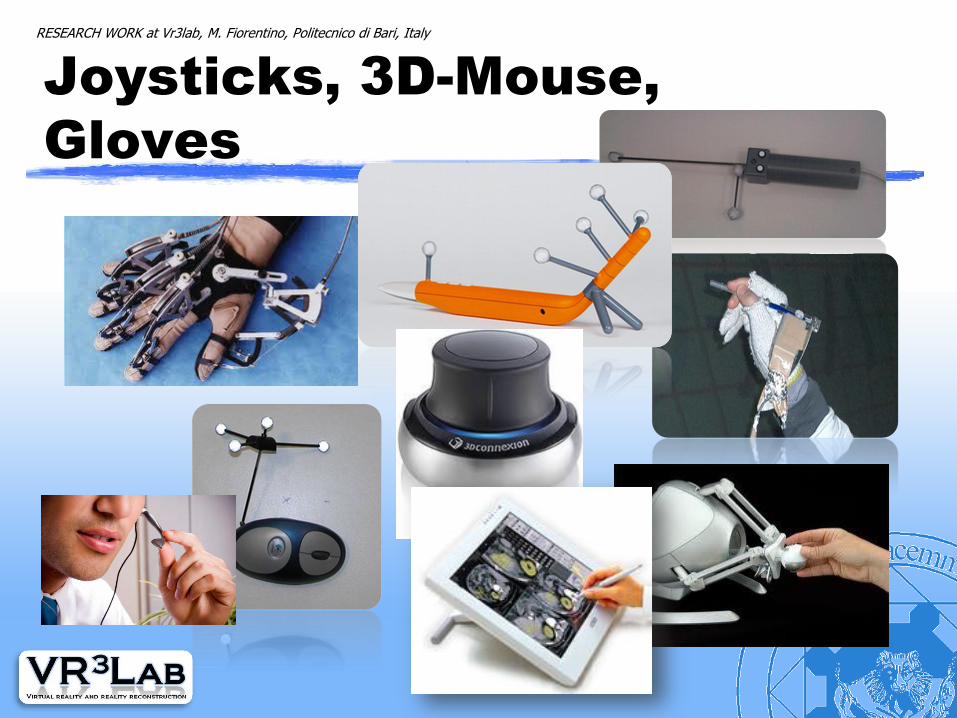
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Joysticks 3D-Mouse
Gloves
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
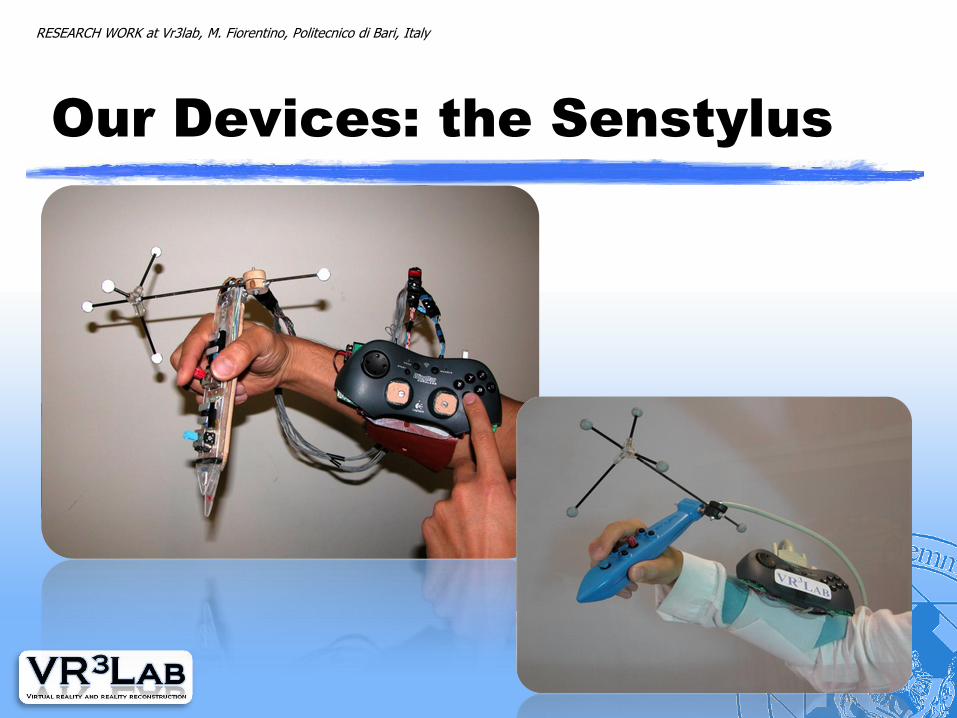
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our Devices the Senstylus
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
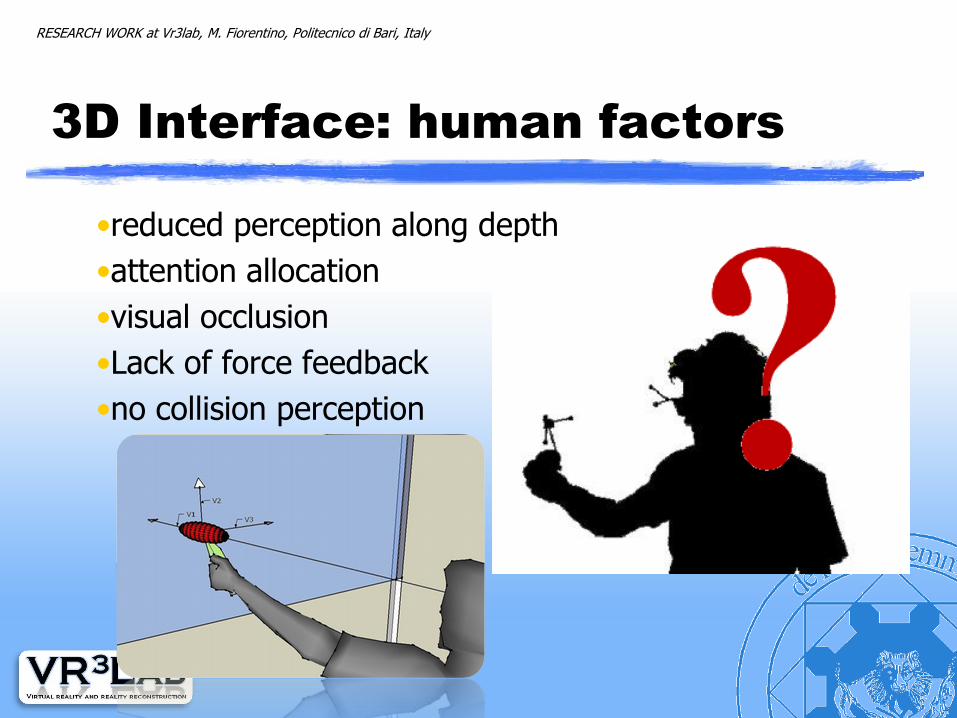
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D Interface human factors
bullreduced perception along depth
bullattention allocation
bullvisual occlusion
bullLack of force feedback
bullno collision perception
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
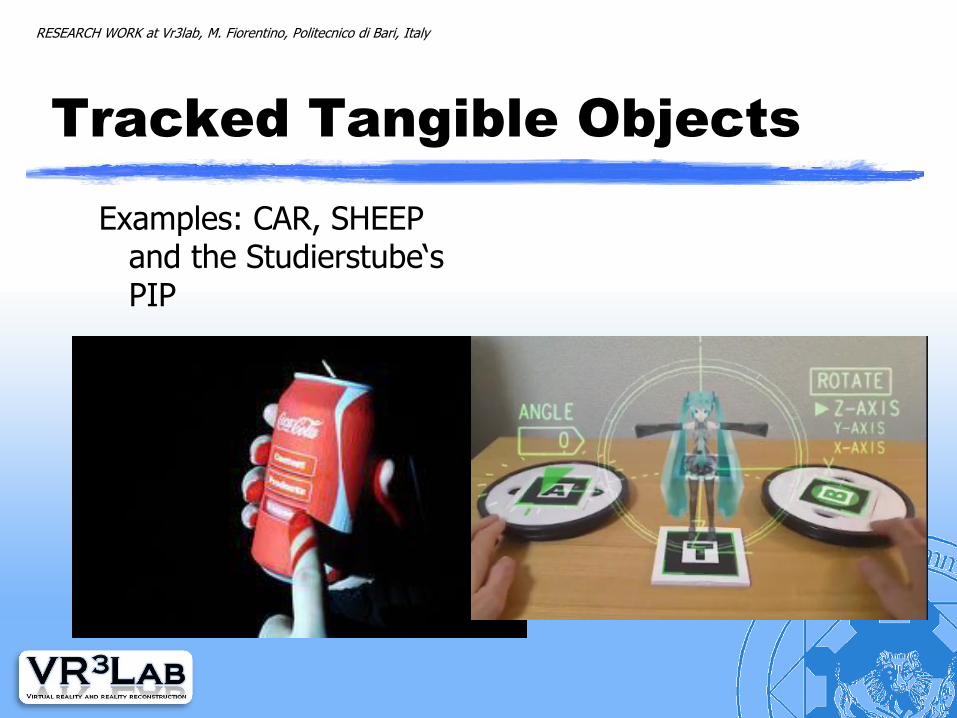
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tracked Tangible Objects
Examples CAR SHEEP and the Studierstubelsquos PIP
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
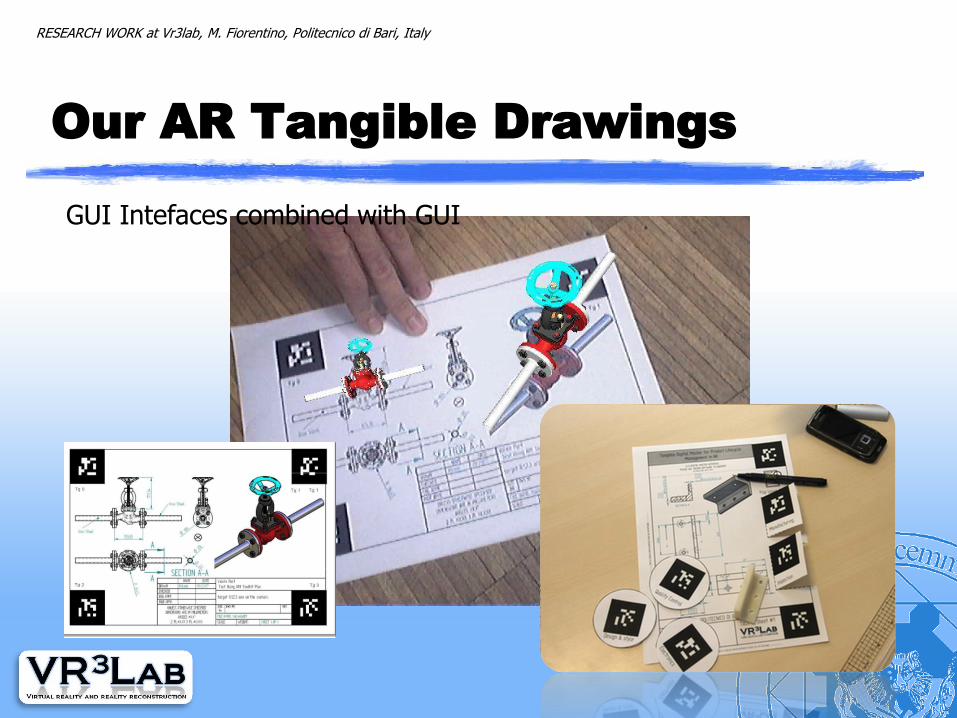
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Our AR Tangible Drawings
GUI Intefaces combined with GUI
video
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Documentation
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Gesture interaction
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Il WiiToCAD
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
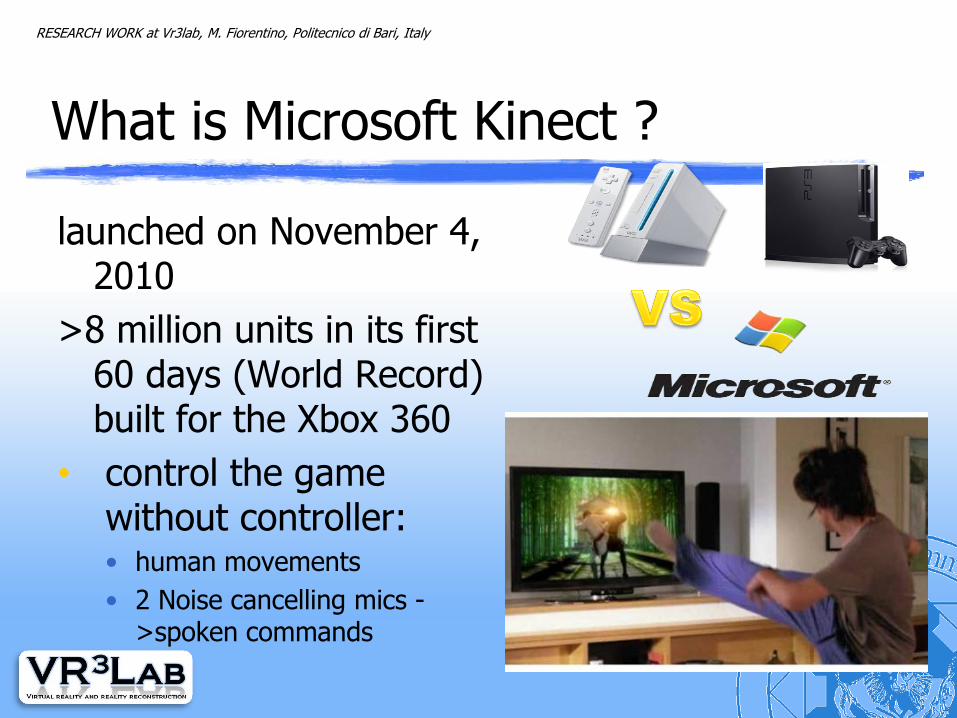
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
What is Microsoft Kinect
launched on November 4 2010
gt8 million units in its first 60 days (World Record) built for the Xbox 360
bull control the game without controller bull human movements
bull 2 Noise cancelling mics -gtspoken commands
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
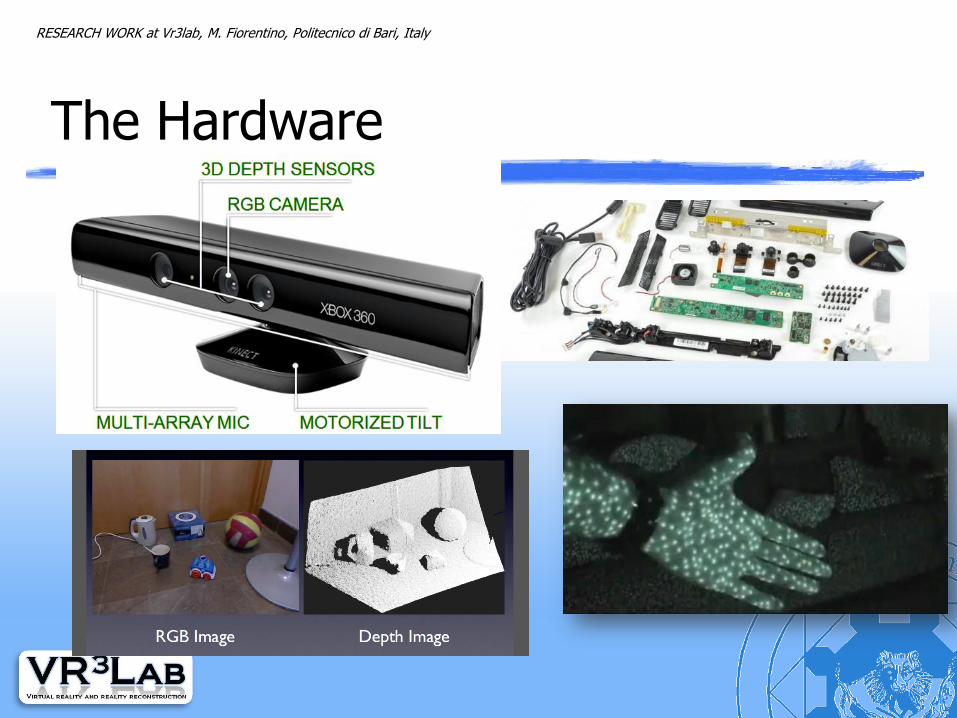
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The Hardware
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Tech Specifications
Sensor Colour and depth-sensing lenses Voice microphone array Tilt motor for sensor adjustment Fully compatible with existing Xbox 360
consoles
Skeletal Tracking System Tracks up to 6 people including 2 active players Tracks 20 joints per active player Ability to map active players to LIVE Avatars
Audio System LIVE party chat and in-game voice chat
(requires Xbox LIVE Gold Membership) Echo cancellation system enhances voice input Speech recognition in multiple
Field of View Horizontal field of view 57 degrees Vertical field of view 43 degrees Physical tilt range plusmn 27 degrees Depth sensor range 12m ndash 35m
Data Streams 320times240 16-bit depth 30 framessec 640times480 32-bit colour 30 framessec 16-bit audio 16 kHz
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Software features
ndash Full Skeleton Tracking
ndash Gesture Recognition
ndash Intuitive Interactive Interface
ndash Voice Recognition Capabilities
ndash Affordable
ndash Easy to install
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Microsoft SDK vs OpenNI
Microsoft bull Easy to install
bull NO calibration pose but gets more false positives
bull Predictive tracking of joints (Good for when sensor losses player) bull Leads to false positives
bull Uses lots of processing power
bull Gets full 1024x768 resolution from camera
bull Full access to microphone
bull Support for tilt
OpenNI bull Open source (Allows for commercial use)
bull Works across all platforms
bull Hand-only tracking
bull Gesture recognition
bull Rotation in joints
bull Tilt has to be done through motor drivers
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
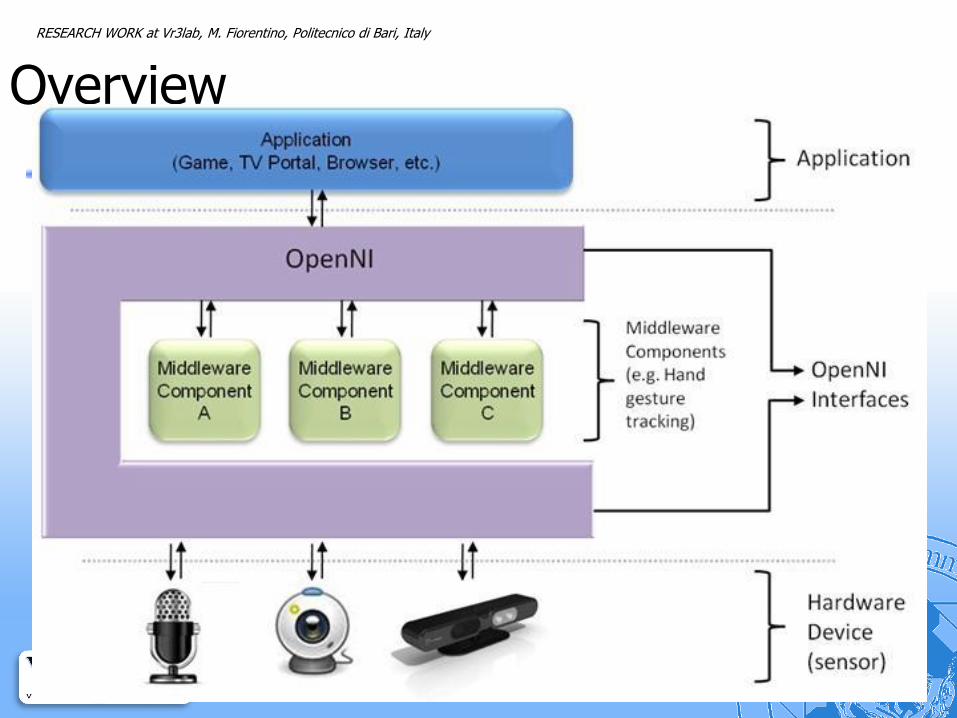
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Overview
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS

RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Hackers using Kinect Marketing
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
3D modelling
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Arts
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Dance game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Rehabilitation
M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS

M Fiorentino Politecnico di Bari
wwwvr3labit
Programming pills
(maybe useful)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Programming now
Ever How deal with X libraries
Present
bull C++ ( memory alloc exceptions etc) the good and the evil
bull Stl + Boost
bull Scripting
bull Qt
Future
bull Boost-ed C++
bull Java (again)
bull Scripting
bull Qt
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
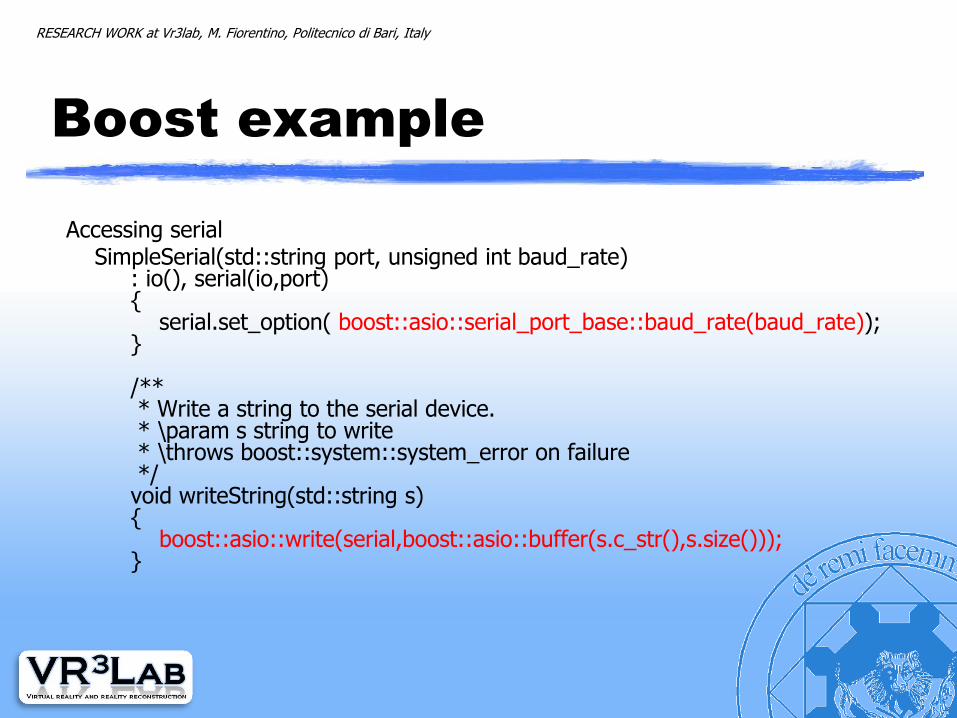
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Boost example
Accessing serial SimpleSerial(stdstring port unsigned int baud_rate)
io() serial(ioport) serialset_option( boostasioserial_port_basebaud_rate(baud_rate)) Write a string to the serial device param s string to write throws boostsystemsystem_error on failure void writeString(stdstring s) boostasiowrite(serialboostasiobuffer(sc_str()ssize()))
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
M Fiorentino Politecnico di Bari
wwwvr3labit
Thesis Topics collaboration with Prof Bevilacqua
T1 Augmented Reality T2 Natural interfaces T3 Reverse Engineering
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
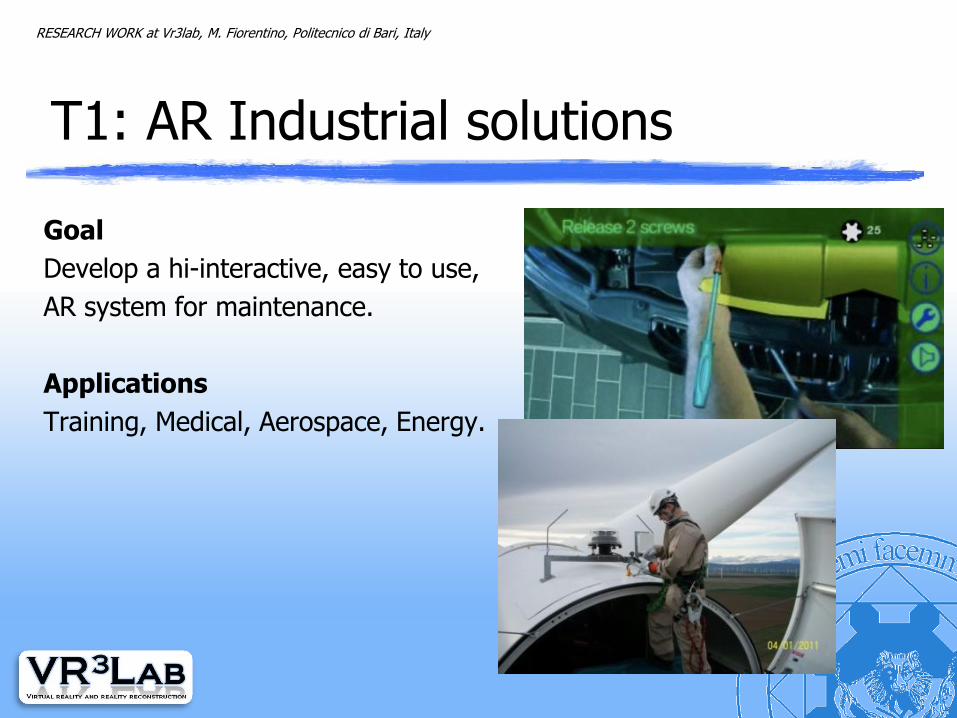
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 AR Industrial solutions
Goal
Develop a hi-interactive easy to use
AR system for maintenance
Applications
Training Medical Aerospace Energy
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS

RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Current research
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
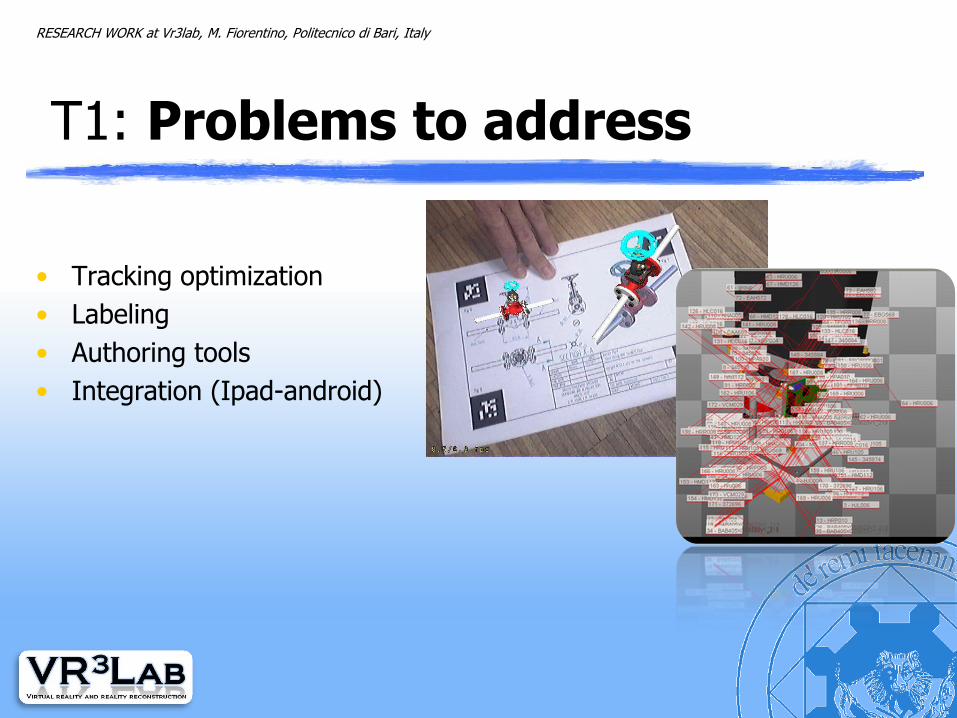
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Problems to address
bull Tracking optimization
bull Labeling
bull Authoring tools
bull Integration (Ipad-android)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T1 Expected results
bull Tracking
bull Comparison of different tracking approaches
bull Improveoptimize tracking algorithms
bull Integration of different tracking technologies
bull Natural tracking
bull Accelerometers (IphoneIpad)
bull Workflow
bull label placement
bull Usability
bull User testing
bull Porting to mobile (AndroidIphone)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
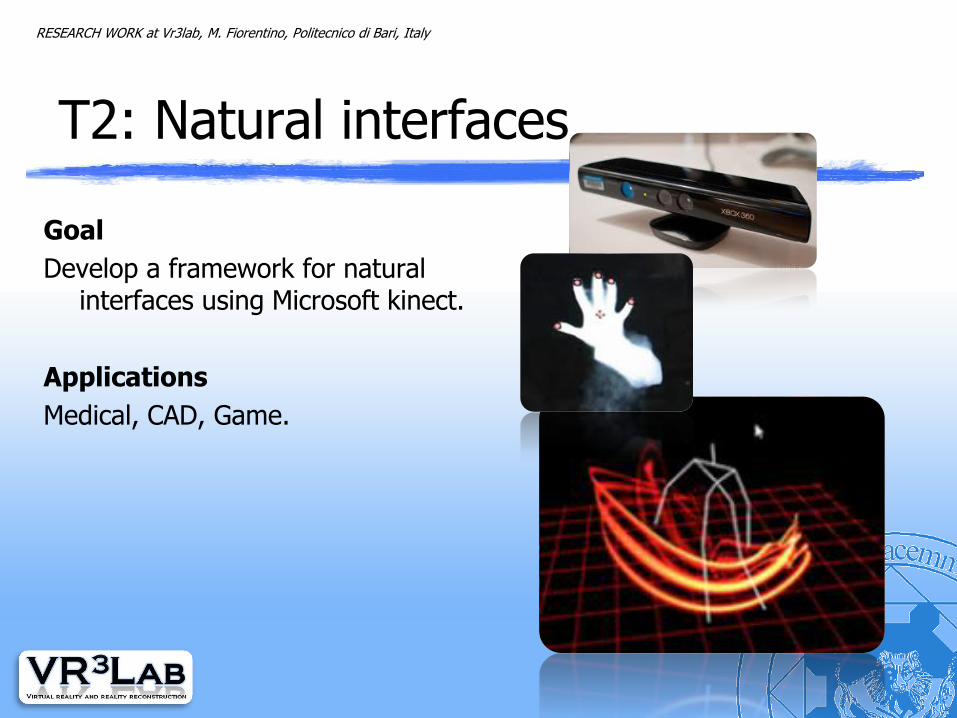
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Natural interfaces
Goal
Develop a framework for natural interfaces using Microsoft kinect
Applications
Medical CAD Game
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 2 skeleton
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
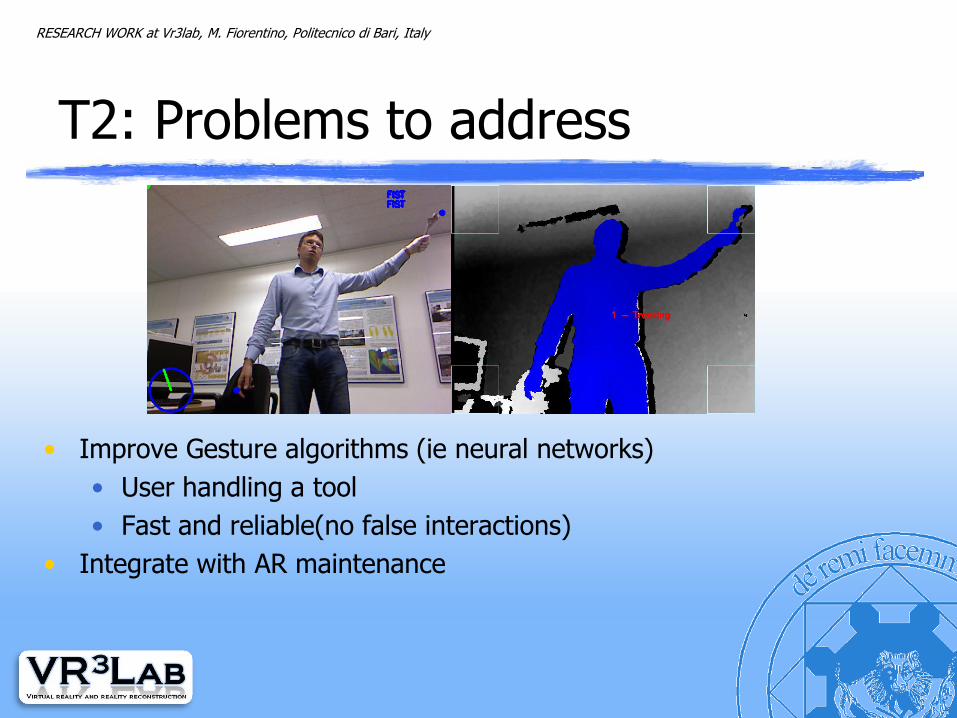
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Problems to address
bull Improve Gesture algorithms (ie neural networks)
bull User handling a tool
bull Fast and reliable(no false interactions)
bull Integrate with AR maintenance
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
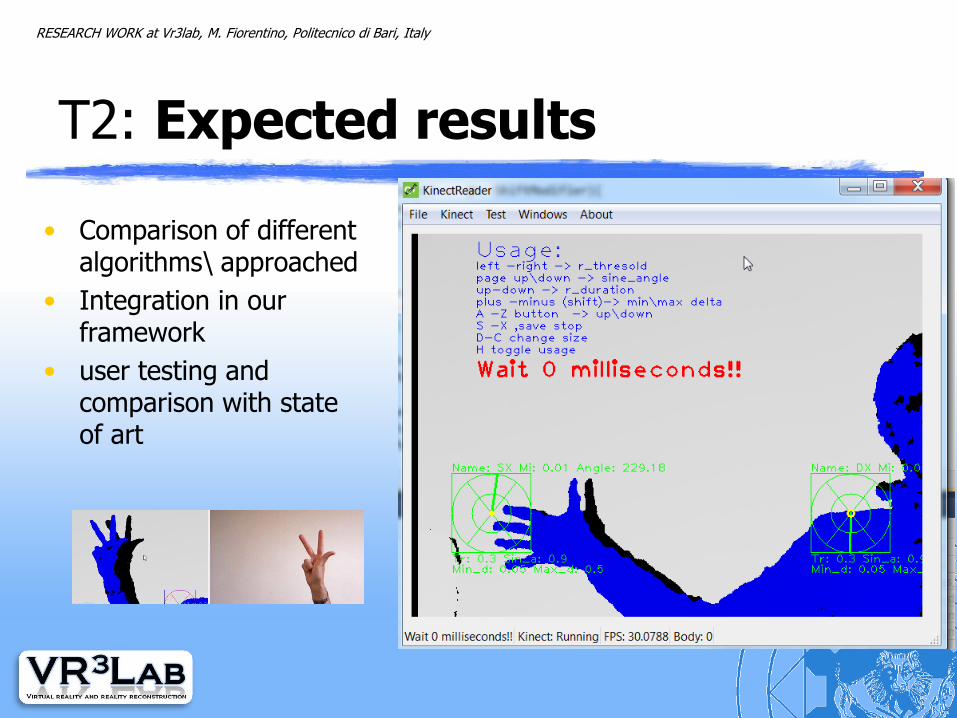
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T2 Expected results
bull Comparison of different algorithms approached
bull Integration in our framework
bull user testing and comparison with state of art
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
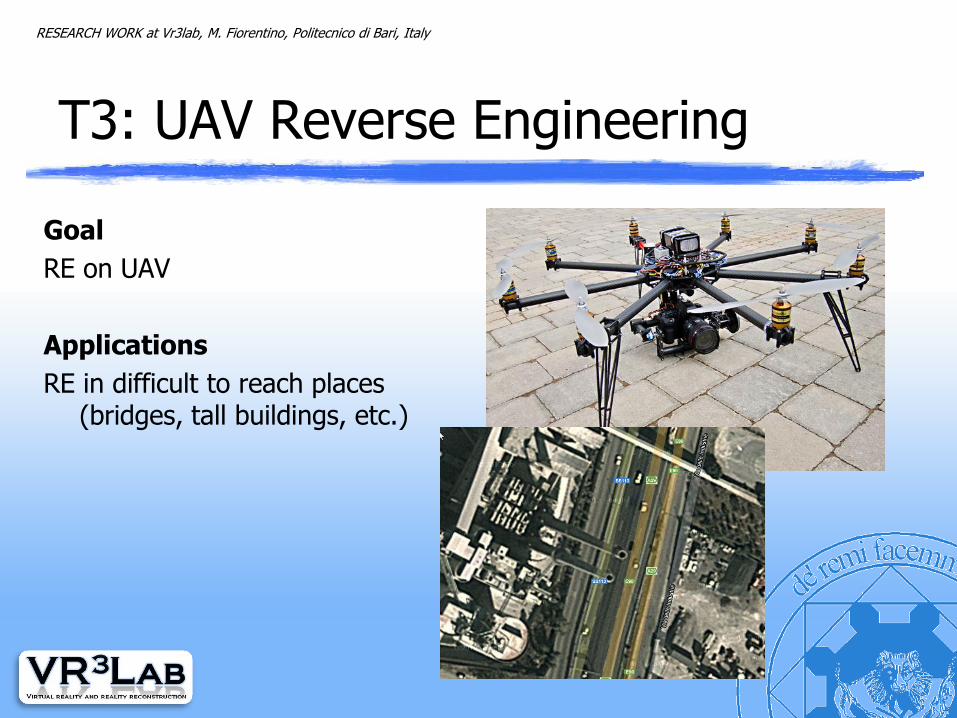
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 UAV Reverse Engineering
Goal
RE on UAV
Applications
RE in difficult to reach places (bridges tall buildings etc)
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
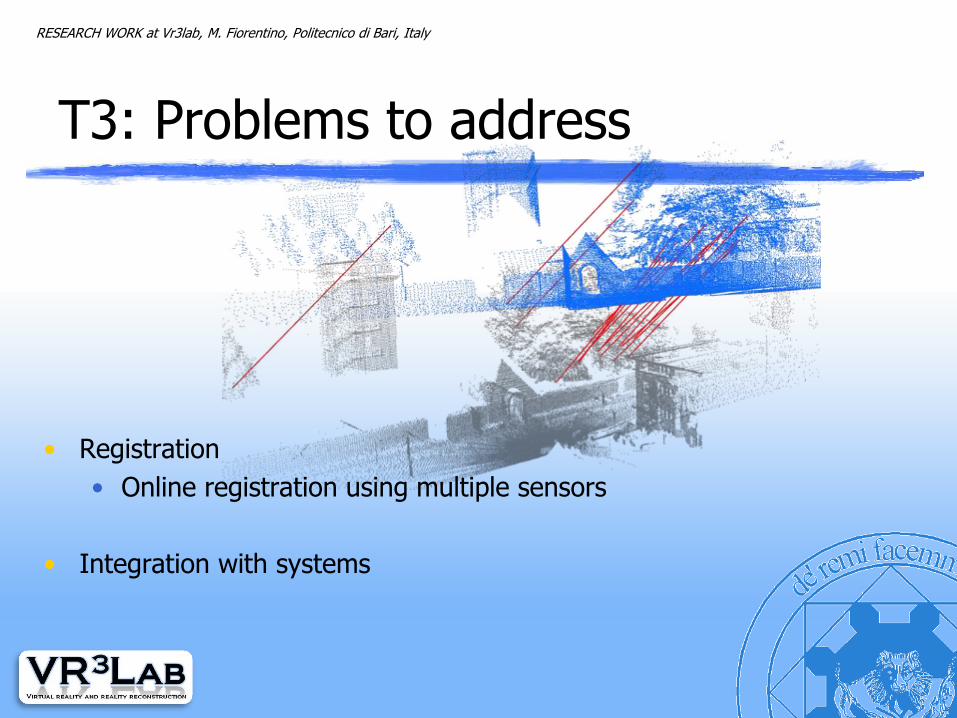
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Problems to address
bull Registration
bull Online registration using multiple sensors
bull Integration with systems
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
Livedemo 3 reverse
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
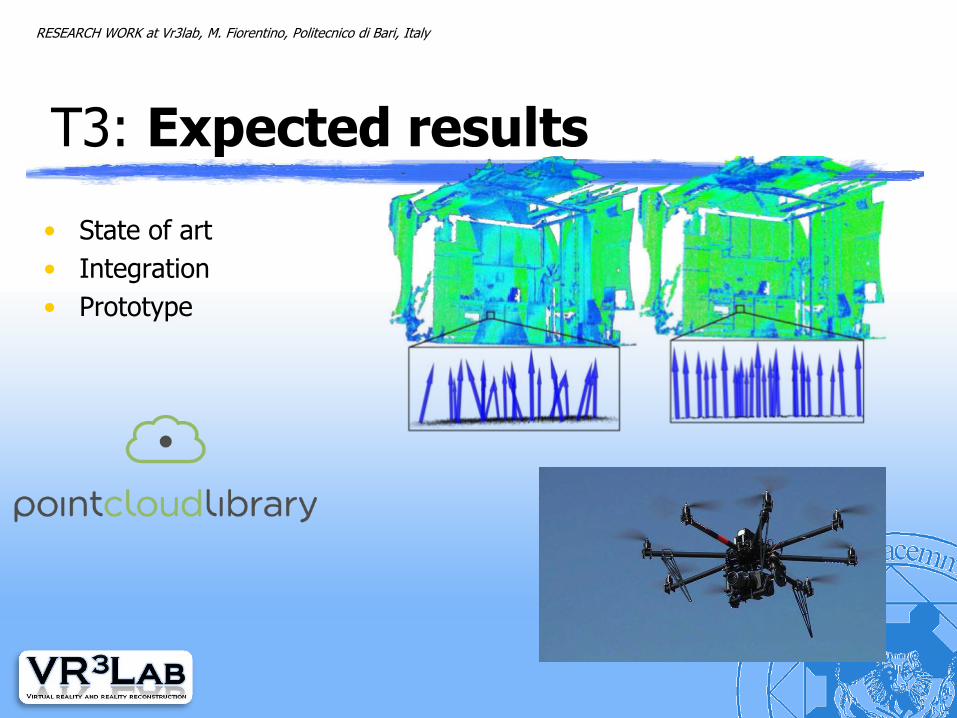
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
T3 Expected results
bull State of art
bull Integration
bull Prototype
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS
RESEARCH WORK at Vr3lab M Fiorentino Politecnico di Bari Italy
The end
Skype Michelefiorentin Office 0039 080 596 2800 Fax 0039 080 596 2777 Mail fiorentinopolibait Snail Mail Dimeg Viale Japigia 182 70126 Bari IT Web httpwwwclimegpolibait~disegnovr3labindexhtm
QUESTIONS