ranging sensors - sns courseware
TRANSCRIPT
Ranging Sensors
By
Mr. K Samba Siva Rao, AP/EIE
SNS COLLEGE OF TECHNOLOGY
(An Autonomous Institution)
Coimbatore-35
Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 7/24/2019 1
Recap of previous session
Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 7/24/2019 2
Proximity & Ranging Sensors
• Proximity sensors provide a binary output and indicate the presence of an object within a specified distance of travel.
• Range sensors are used to measure the distance between the object and the sensor.
• Generally, proximity and range sensors are located on the wrist or end – effector of the robot.
Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 7/24/2019 3
Types of proximity Sensors
Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 7/24/2019 4
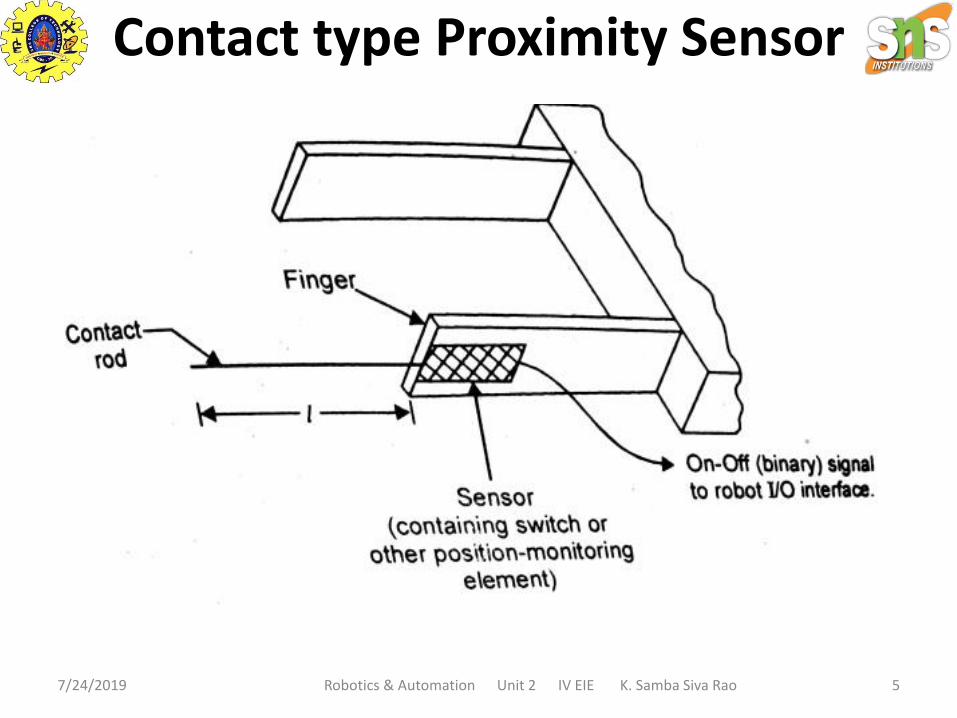
Contact type Proximity Sensor
Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 7/24/2019 5
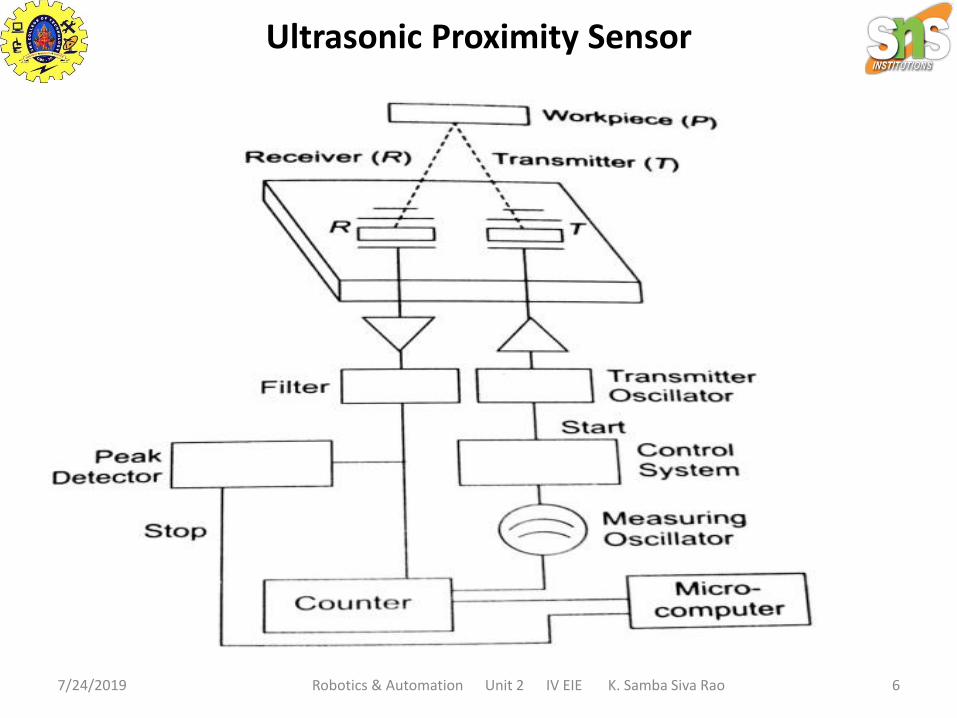
Ultrasonic Proximity Sensor
Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 7/24/2019 6
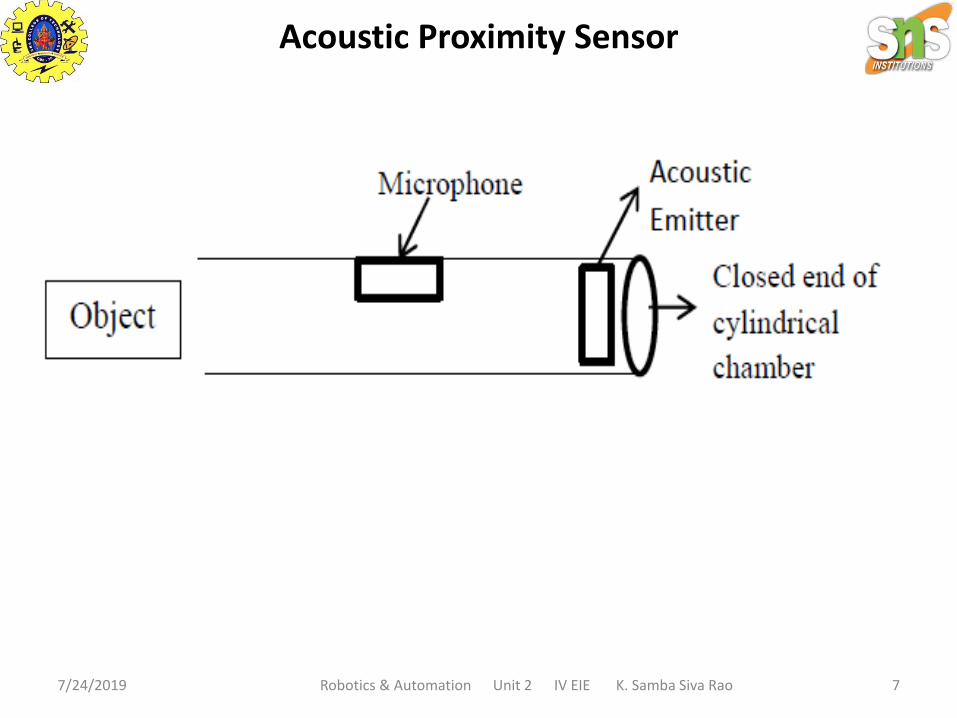
Acoustic Proximity Sensor
Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 7/24/2019 7
Eddy Current type Proximity Sensor • Can be used to detect non – magnetic but
conductive materials
• when a coil is supplied with an alternating current, an alternating magnetic field is produced
• If there is a metal object in close proximity to this alternating magnetic field, then eddy currents are induced in it
• The eddy currents themselves produce a magnetic field, which distort the magnetic field already existing. This change in flux density indicates the presence of an object
7/24/2019 Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 8
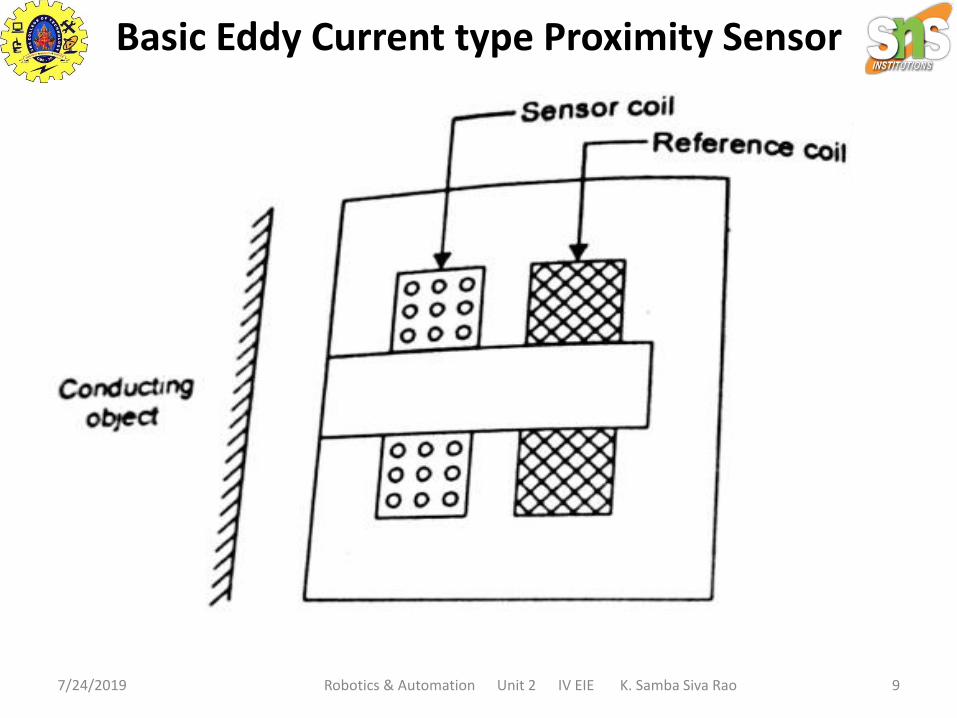
Basic Eddy Current type Proximity Sensor
Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 7/24/2019 9
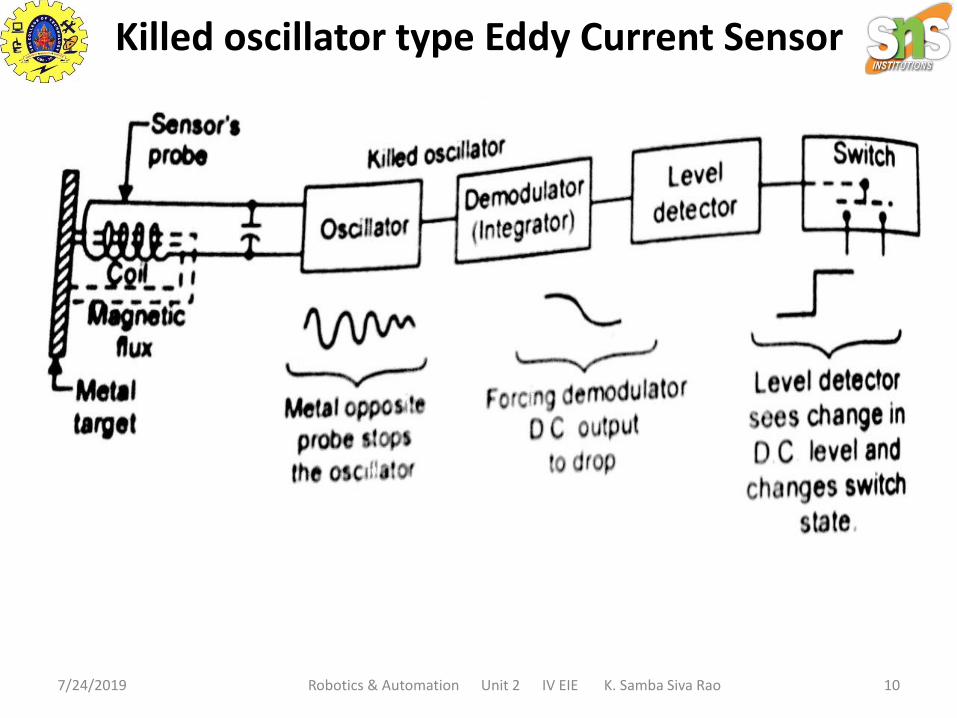
Killed oscillator type Eddy Current Sensor
Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 7/24/2019 10
Advantages & Disadvantages
Advantages
• High flexibility
• High sensitivity to small displacements
• Smaller size
• Less expensive
Disadvantages
• Must be calibrated for the type of metal used for the target
• Size of sensor depends on effective linear measuring range (larger distances require larger probes)
7/24/2019 Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 11
Magnetic Proximity Sensors • It is made using a reed switch and permanent
magnet. (Reed Switch Working, Example)
• The permanent magnet can be either made a part of object being detected or can be part of the sensor device.
• In either case, the presence of object in the region of the sensor completes the magnetic circuit and activates the reed switch.
• The advantages of these sensors are: – Simple construction
– No external power supply is required.
7/24/2019 Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 12
Time for
Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 7/24/2019 13
Range Sensing Techniques
• The range sensing techniques are:
– Triangulation technique
– Structured lighting approach
– Time – of – flight range finder
7/24/2019 Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 14
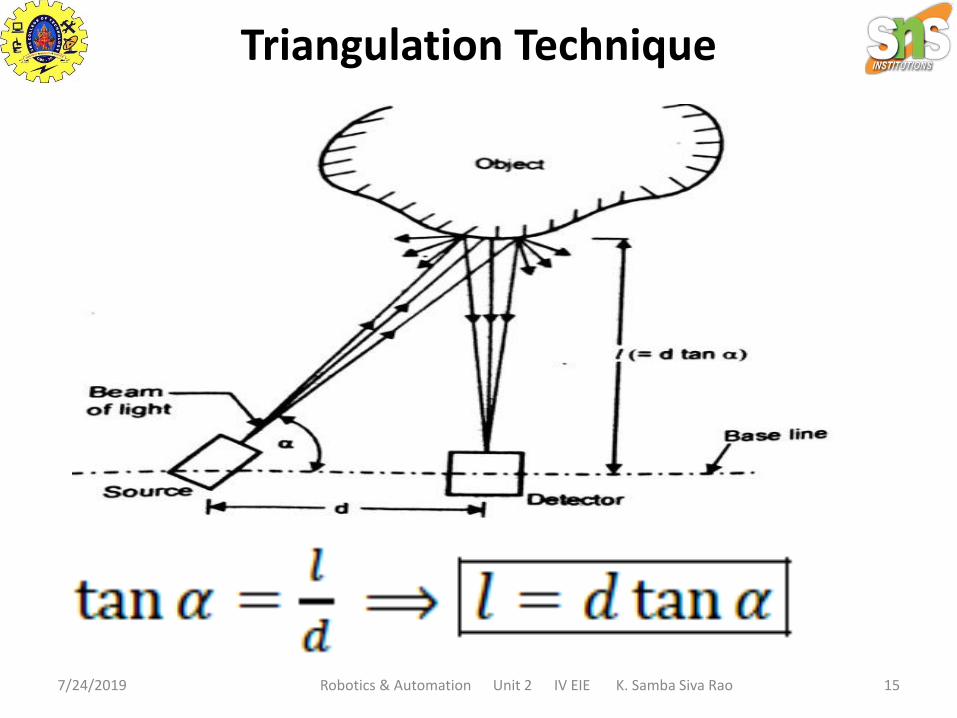
Triangulation Technique
7/24/2019 Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 15
Structured lighting approach
7/24/2019 Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 16
Structured lighting approach
Time-of- flight range finder • These methods involve the use of laser and ultrasonic
waves.
• The time it takes for an emitted pulse of light (laser) to return coaxially i.e. along the same path from a reflecting surface (object to be detected) is used to estimate the distance.
• The relation between distance and time of flight is given by:
𝑙 =𝐶 ∗ 𝑡𝑝𝑡
2
Where,
– l is the distance between light source and object
– C is the velocity of light
– tpt is the pulse transit time
7/24/2019 Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 17
Session Conclusion
Robotics & Automation Unit 2 IV EIE K. Samba Siva Rao 7/24/2019 18