qos-aware dynamic spectrum access for cognitive radio networks
TRANSCRIPT

QoS-aware Dynamic Spectrum Access for Cognitive Radio Networks
Xin Tian1, Zhi Tian
2, Khanh Pham
3, Erik Blasch
4, and Genshe Chen
1
1 Intelligent Fusion Technology, Inc., Germantown, MD, 20876 USA
2 Dept. of Electrical and Computer Engineering, Michigan Tech University, Houghton, MI 49931 USA
3 Air Force Research Laboratory, Space Vehicles Directorate, Kirtland AFB, NM 87117 USA
4 Air Force Research Laboratory, Information Directorate, Rome, NY 13441 USA
ABSTRACT
Ubiquitous wireless networking requires efficient dynamic spectrum access (DSA) among
heterogeneous users with diverse transmission types and bandwidth demands. To meet user-specific
quality-of-service (QoS) requirements, the power and spectrum allocated to each user should lie inside
a power/spectral-shape bounded region in order to be meaningful for the intended application. Most
existing DSA methods aim at enhancing the total system utility. As such, spectrum wastage may arise
when the system-wide optimal allocation falls outside individual users’ desired regions for QoS
provisioning. In this work, novel QoS-aware DSA algorithms are developed for both non-cooperative
power allocation (QoSNCPA) and cooperative (QoSCPA) users in cognitive radio (CR) networks. The
algorithms maximize the “useful utilities” to the users, and minimize the power consumption and
mutual interference within the CR network. Simulations results of the QoSNCPA and QoSCPA for
single and multiple channel cases demonstrate the effectiveness of the algorithms for DSA.
Keywords: Cognitive Radio, Dynamic Spectrum Access, Quality of Service (QoS), communications
1. INTRODUCTION
Dynamic spectrum access (DSA) is a promising technology to solve today’s spectrum scarcity
problem. To achieve DSA in new spectrum-agile networks with cognitive radios (CR), users are able
to sense and adaptively utilize the available spectrum [1]. In such spectrum-agile communication
systems, CR users face the tradeoff between interference among CR devices and efficiency of
spectrum utilization. In general, DSA mechanisms can be categorized into two types, i.e., spectrum-
segregation DSA and spectrum-overlay DSA. In spectrum-segregation DSA, spectrum channels are
exclusively occupied by one CR user, which include the lease-based DSA [2], price-based DSA [3-5],
and detection-based DSA [6-9]. However this type of DSA will lead to limited spectrum utilization
efficiency. The second type, spectrum-overlay DSA, allows multiple users to share the same
communication channel as long as their interferences to each other are below certain thresholds.
However, the CRs need to handle intricate interference control and spectrum utilization efficiency.
Existing DSA schemes include distributed game-theoretic, iterative waterfilling [10,11], cross-layer
CSMA-based, and rule-based algorithms. In [12], the problem of modeling a network as a cooperative
potential game is addressed. In [13] pricing schemes were investigated to introduce penalties for
users’ self-interested strategies to facilitate fair and efficient DSA and distributed implementation. In
Sensors and Systems for Space Applications VI, edited by Khanh D. Pham, Joseph L. Cox, Richard T. Howard, Genshe Chen, Proc. of SPIE Vol. 8739, 87390P · © 2013 SPIE · CCC code: 0277-786X/13/$18 · doi: 10.1117/12.2015205
Proc. of SPIE Vol. 8739 87390P-1
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms

[14] the DSA problem is addressed in Dual domain by applying the Karush-Kuhn-Tucker (KKT)
principle, which allows the solving of a global DSA optimization problem in a distributed manner
with guaranteed convergence. Towards this direction, paper [17] introduced the “interference price”
scheme, which reflects the interference levels on available channels of other CR users. It was shown
that DSA schemes with the communication of interference prices among CRs outperform their
counterparts [14-16].
However, most existing DSA algorithms aim at maximizing the overall network utility, e.g., overall
system capacity, without considering the actual needs (Quality of Service (QoS) requirements) of
individual users. For example, excessive spectrum resources may be allocated to some CR users
exceeding the needs of their intended transmissions, while some other users might receive spectrum
resource that is insufficient for their communication needs. Both cases will result in waste of spectrum
resources. An earlier work that addressed this problem is [17], which extends the asynchronous
distributed pricing (ADP) algorithms in [14-16] by incorporating CR users’ QoS requirements to the
DSA process. However, the algorithms proposed in [17] involve a heuristic change of channel power
allocation level by p in each iteration of the algorithm, which may lead to slow convergence. In this
paper, algorithms are developed for QoS-aware DSA for both non-cooperative and cooperative cases.
The proposed algorithms are able to minimize the power consumption to achieve the useful capacity
[18], while at the same time maximize the useful capacity of the CRs [19]. With no heuristic steps, the
proposed algorithms are easy to implement and have fast convergence speed.
The rest of the paper is organized as follows. Section 2 formulates a general power control problem
for DSA and briefly reviews the relevant DSA solutions in the literature. Section 3 addresses the
problem of non-cooperative QoS-aware DSA. Section 4 presents algorithms for cooperative QoS
aware DSA. Simulation results are presented at the corresponding sections for the proposed algorithms
to show their effectiveness. Section 5 summarizes the paper with concluding remarks.
2. PROBLEM FORMULATION: POWER CONTROL FOR DSA
The genetic scenario for spectrum sharing of multiple CRs is illustrated in Figure 1, which consists of
multiple pairs of transmitters (denoted as Ti) and receivers (denoted as Ri). The channel coefficients from transmitter i to receiver j is denoted as hij which, in general, is a vector. However, for space communication where the issue of multi-path transmission is insignificant, hij is a scalar for each communication channel accounting for the loss of signal strength at the receiver. The signal to interference and noise density ratio (SINR) at the receiver is
10
1,... ,
ii ii
ji jW
j M j i
h p
n h p
(1)
where pj is the spectrum allocation, W is the channel bandwidth and n0 is the noise. For the sharing of spectrum resources among multiple CRs two general strategies are i) non-cooperative spectrum allocation and ii) cooperative spectrum allocation.
Figure 1. A Genetic Scenario for CR Spectrum Allocation Problems.
Proc. of SPIE Vol. 8739 87390P-2
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms

For M users the non-cooperative power control game (GNCP) for non-cooperative spectrum
allocation over a single channel was formulated in [20] as
*
1 1 1max( ( ( , ))), ,... , ,..., , 1,...,i
i i i i i i i i Mp
p u p p p p p p p i M (2)
where ui is a concave utility function. At Nash-Equilibrium (NE) one has
* * *( ( , )) ( ( , )), , 1,...,i i i i i i i i i iu p p u p p p P i M (3)
It is easy to see for GNCP the * max
i ip P , namely, each user will use the maximum transmission
power over the channel, which is obviously not optimal in the global sense.
The cooperative power control game (GCP) was proposed in [14]. Assuming the CRs are cooperative and the objective is to maximize the total capacity of the system. For single channel case, the problem is formulated as
*
1:
1
max( ( ( ))), { ,..., }i i
M
i i Mp P
i
u p p
p
p p p
(4)
s.t. min max , 1,...,i i iP p P i M
The optimal solution based on Karush–Kuhn–Tucker (KKT) condition satisfies
, , , ,, , 0
Mji
i u i l i u i l
j ii i
uu
p p
(5)
min max
, ,( ) 0, ( ) 0i l i i i u i ip P p P
(6)
where ,i u and ,i l are the Lagrange multipliers for the maximum and the minimum transmission
powers.
To solve the GCP, define j
j
j
u
I
as a price charged to other users due to the interference from
user I. Then user i updates the following surplus function [14]
( , , )M
i i i i i j ij i
j i
s p p u h p
(7)
which leads to the asynchronous distributed pricing (ADP) algorithm [14]. At each iteration for user i one has
* max ( , , )i i
i i i i ip P
p s p p
(8)
To show how the ADP algorithm works, consider a scenario (Scenario 1) where M = 5 transmitters are randomly distributed in a area of 10m by 10m; the receivers is randomly placed within 6m by 6m
Proc. of SPIE Vol. 8739 87390P-3
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms
square centered around the transmitter hij=dij-4
. The noise level is n0=10-2
. The utility function for each user is
2
0
1,... ,
=log (1 )ii ii
ji j
j M j i
h pu
n h p
(9)
The maximum transmission power for each user is set at 20.
1 2 3 4 5-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
user id
Derivitiv
e o
f S
urp
lus f
unction
0 2 4 6 8 10 1217.5
18
18.5
19
19.5
20
20.5
number of iteration
Tota
l U
tility
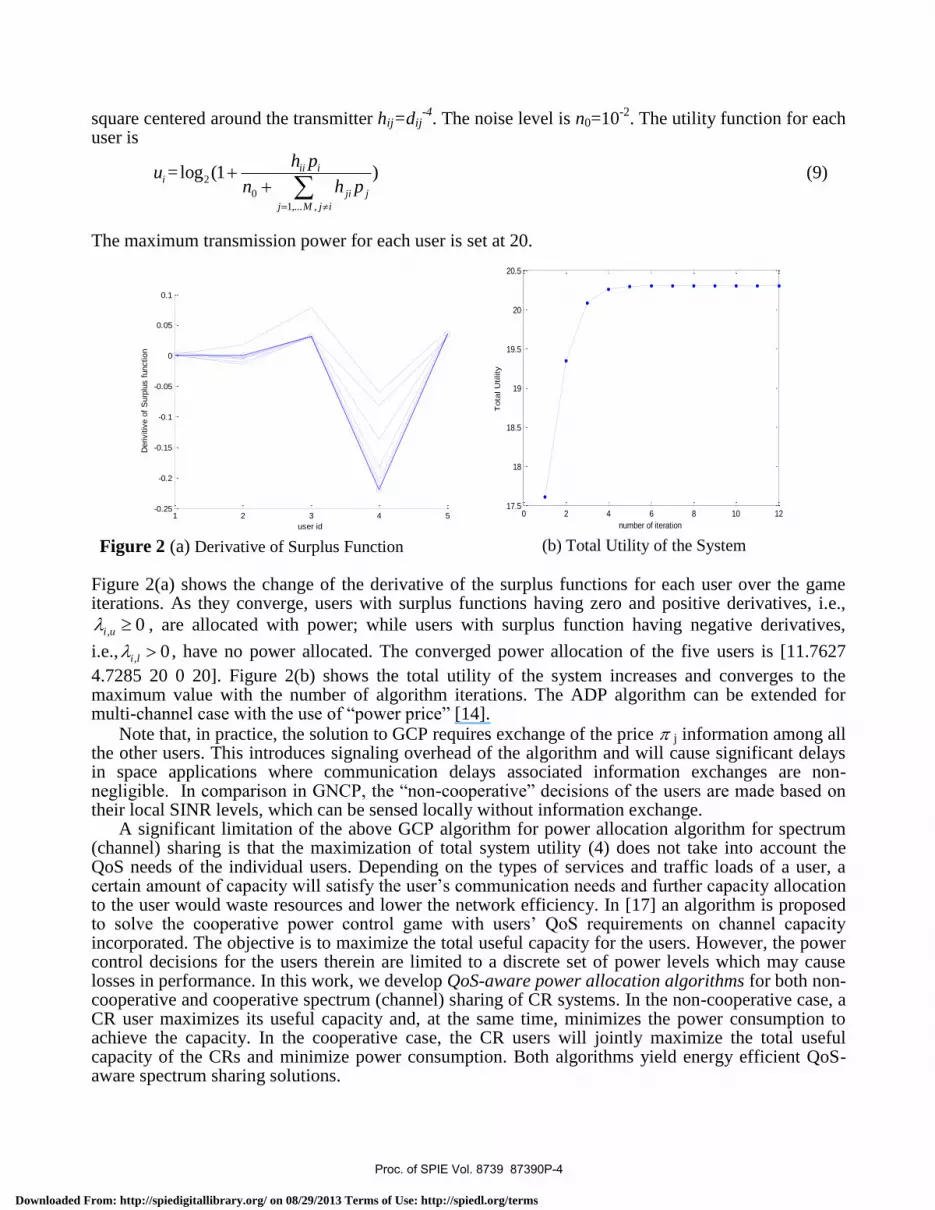
Figure 2 (a) Derivative of Surplus Function (b) Total Utility of the System
Figure 2(a) shows the change of the derivative of the surplus functions for each user over the game iterations. As they converge, users with surplus functions having zero and positive derivatives, i.e.,
, 0i u , are allocated with power; while users with surplus function having negative derivatives,
i.e., , 0i l , have no power allocated. The converged power allocation of the five users is [11.7627
4.7285 20 0 20]. Figure 2(b) shows the total utility of the system increases and converges to the maximum value with the number of algorithm iterations. The ADP algorithm can be extended for multi-channel case with the use of “power price” [14].
Note that, in practice, the solution to GCP requires exchange of the price j information among all the other users. This introduces signaling overhead of the algorithm and will cause significant delays in space applications where communication delays associated information exchanges are non-negligible. In comparison in GNCP, the “non-cooperative” decisions of the users are made based on their local SINR levels, which can be sensed locally without information exchange.
A significant limitation of the above GCP algorithm for power allocation algorithm for spectrum (channel) sharing is that the maximization of total system utility (4) does not take into account the QoS needs of the individual users. Depending on the types of services and traffic loads of a user, a certain amount of capacity will satisfy the user’s communication needs and further capacity allocation to the user would waste resources and lower the network efficiency. In [17] an algorithm is proposed to solve the cooperative power control game with users’ QoS requirements on channel capacity incorporated. The objective is to maximize the total useful capacity for the users. However, the power control decisions for the users therein are limited to a discrete set of power levels which may cause losses in performance. In this work, we develop QoS-aware power allocation algorithms for both non-cooperative and cooperative spectrum (channel) sharing of CR systems. In the non-cooperative case, a CR user maximizes its useful capacity and, at the same time, minimizes the power consumption to achieve the capacity. In the cooperative case, the CR users will jointly maximize the total useful capacity of the CRs and minimize power consumption. Both algorithms yield energy efficient QoS-aware spectrum sharing solutions.
Proc. of SPIE Vol. 8739 87390P-4
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms

3. QOS-AWARE NON-COOPERATIVE SPECTRUM SHARING
Suppose there are K communication channels available for the CR users. The QoS-aware non-cooperative power allocation problem can be formulated as.
1*
2 , , ,
0
,max
,
arg max min log (1 ), , min{ }
. .,
0 0,..., 1
ii
KT
i i k i k i ipp
k
T
i i
i k
p p C p
s t p P
p k K
1
1
(10)
where ,0 ,1 , 1[ ]i i i i Kp p p p is the power allocation vector for user i; ,i k is the channel coefficient of
channel k of user i, which is determined by factors including the channel gain, the level of channel
noise and interference; ,iC is the up limit of the useful capacity for the user; and ,maxiP is the
maximum transmission power of the CR. The objective of the user is to first maximize its useful capacity and minimize the total power used to achieve the capacity. Define
1
1
, , ,=i k i k i kp
(11)
Based on the KKT condition (or the waterfilling rule), at the optimal power allocation, the following optimal condition should be satisfied
, ,, | 0i k i kk k p and , ,, | 0i k i kk k p (12)
Figure 3 shows the flowchart of the proposed QoS-aware non-cooperative power allocation (QoSNCPA) algorithm, which is able to converge from any non-optimal power allocation to the optimal solution of problem (10). The algorithm starts from evaluating and checking if the current
total capacity tC over the channels reaches the desired level ,iC . If ,t iC C . power will be taken off
from the channel with the minimum ,i k until ,t iC C is satisfied. Once ,t iC C , a power balancing
process (shown in the right branch of the flowchart) is carried out, which keeps ,t iC C and drive
the power allocation towards the optimal condition with (5)-(6) satisfied. When ,t iC C , a power
reallocation process is carried out to increase the total useful capacity and converge towards the optimal power allocation.
Proc. of SPIE Vol. 8739 87390P-5
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms
Starting at pi=[Pi,max,Pi,max,...Pi,max]/K
,t iC C
Select
Yes
,arg min , 0,..., 1i kk
l k K
Set
Evaluate current total utility1
2 , ,
0
log (1 )K
t i k i k
k
C p
,t iC C No
No
Yes
, ,( )
, ,max 2 1 / ,0i l t iC C C
i l i lp
Note that ( ) denotes
the unit step function.
U p
,Select arg min andi kk
l
,arg max , 0,..., 1i kk
m k K
1
, ,
0
1and evaluate ( )
K
ave i k i k
k
U pK
1 1
,Evaluate max ,0ave i lp
,Evaluate = i lp p p
, ,Set =i m i mp p p
,Set i lp p
3
, , ,If 10i m i l i m
Yes
,0 , 1Output =[ ,..., ]i i i Kp p p
No
,Select arg min andi kk
l
,arg max , 0,..., 1i kk
m k K
1
, ,
0
1and evaluate ( )
K
ave i k i k
k
U pK
1 1
,Evaluate max ,0ave i lp
, 2 ,Evaluate C=C log (1 )i l i lp
,(C )
, ,Set = 2 1 /i m C
i m i mp
,Set i lp p
3
, , ,If 10i m i l i m
Yes
,0 , 1Output =[ ,..., ]i i i Kp p p
No
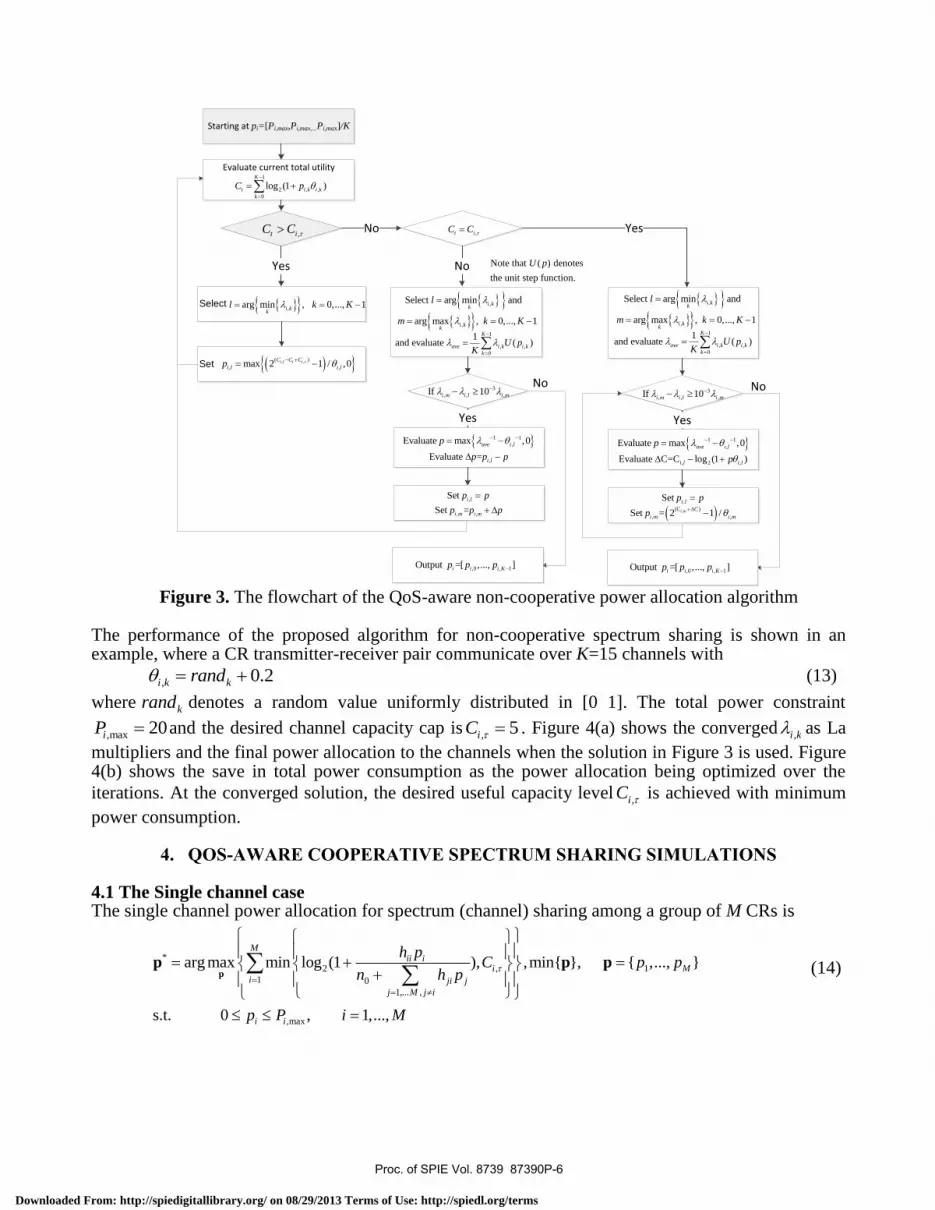
Figure 3. The flowchart of the QoS-aware non-cooperative power allocation algorithm
The performance of the proposed algorithm for non-cooperative spectrum sharing is shown in an example, where a CR transmitter-receiver pair communicate over K=15 channels with
, 0.2i k krand (13)
where krand denotes a random value uniformly distributed in [0 1]. The total power constraint
,max 20iP and the desired channel capacity cap is , 5iC . Figure 4(a) shows the converged ,i k as La
multipliers and the final power allocation to the channels when the solution in Figure 3 is used. Figure 4(b) shows the save in total power consumption as the power allocation being optimized over the
iterations. At the converged solution, the desired useful capacity level ,iC is achieved with minimum
power consumption.
4. QOS-AWARE COOPERATIVE SPECTRUM SHARING SIMULATIONS
4.1 The Single channel case The single channel power allocation for spectrum (channel) sharing among a group of M CRs is
*
2 , 1
1 0
1,... ,
,max
arg max min log (1 ), ,min{ }, { ,..., }
s.t. 0 , 1,...,
Mii i
i M
i ji j
j M j i
i i
h pC p p
n h p
p P i M
p
p p p (14)
Proc. of SPIE Vol. 8739 87390P-6
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms

0 5 10 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
channel id (k)
Final power allocation
La Multiplier
0 5 10 15 20 25 30 35
4
6
8
10
12
14
16
18
20
Number of Iteration
Tota
l pow
er
consum
ption
Figure 4 (a) Converged ,i k and Power Allocation (b) Total Power Consumption to Achieve ,qC
The process starts from an arbitrary power allocation of the M users, shown in Figure 5. For each user first the interference from other users and the channel capacity are
evaluated. If the current capacity of user i, i.e., iC is greater
than the required level ,iC , adjust ,
0(2 1)( )iC
i ip n I
such that the channel capacity equals ,iC .
Evaluate ii
i
C
I
for each user from which the price
1,
M
i i ji
j j i
h
reflecting the impact of user i’s power
increase on the capacities of other users.
For users that satisfy ,i iC C , evaluate
1
0 0( ) 1 ( ) /ii i i ii
ii
p n I n I hh
such that ii i
i
Cb
p
Adjust ip as ,
,max 0min{max{ ,0}, ,(2 1)( ) / }iC
i i i i iip p P n I h to
enforce the minimum and maximum power constraint and channel capacity requirement.
Go to the next iteration, and compare the difference of the total useful system capacity to decide if the algorithm has converged. 4.2 The Single Channel case Simulation results To demonstrate the performance of the QoSCPA-SC algorithm, we use a scenario that has similar configuration
to Scenario 1, with M=5 users with , 5iC . The maximum
transmission power of each user is set as , 70iP . Figure 6
shows the increase of the total useful user capacity in (13) with the number of algorithm iterations.
Evaluate
Starting from an arbitrary power allocation p=[p1, p2,…,pM]
Evaluate the capacity for each user
2
0
log (1 )ii ii
i
h pC
n I
,i iC C
,
0(2 1)( )iC
i ip n I
1,... ,
,i ji j
j M j i
I h p
Yes
No
Evaluate and i ii i
i i
C Cb
I p
1,
Evaluate M
i i ji
j j i
h
,i iC C
1
0 0( ) 1 ( ) /ii i i ii
ii
p n I n I hh
,
,max 0min{max{ ,0}, , (2 1)( ) / }iC
i i i i iip p P n I h
,
1
min{ , }M
T i i
i
C C C
310T T TC C C
Yes
Output * * * *
1 2[ , ..., ]Mp p pp
No
Note denotes in the previous iterationTC
TC
Figure 5. Flowchart of QoSCPA-SC
Proc. of SPIE Vol. 8739 87390P-7
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms
After about 18 iterations, the algorithm converges to the optimal power allocation at [1.3156 0 5.3081 0 22.7466]p .
4.3 The Multi-Channel Case When there are multiple K channels for the M CRs to communicate. The multi-channel cooperative power allocation problem can be formulated as
1* ,
2 ,
1 0 0, , ,
1,... ,
1
, ,max
0
,
arg max min log (1 ), ,min{ }
s.t. 0 , 1,...,
0
M Kii i k
i
i k i k ji j k
j M j i
K
i k i
k
i k
h pC
n h p
p P i M
p
pp p
(15)
where 1{ ,..., }Mp pp are the users’ power allocation profile
and ,0 , 1[ ,..., ]i i i Kp p p is the power allocation of user i to
the communication channels; p denotes the total power
consumption of the CRs.
Figure 8 (presented on the next page) shows the
flowchart of the proposed multi-channel QoS-aware
cooperative power allocation (QoSCPA-MC) algorithm,
which is a combination of a process similar to the
QoSCPA-SC across multiple users and a process similar to
QoSNCPA for power allocation among the channels of a
user.
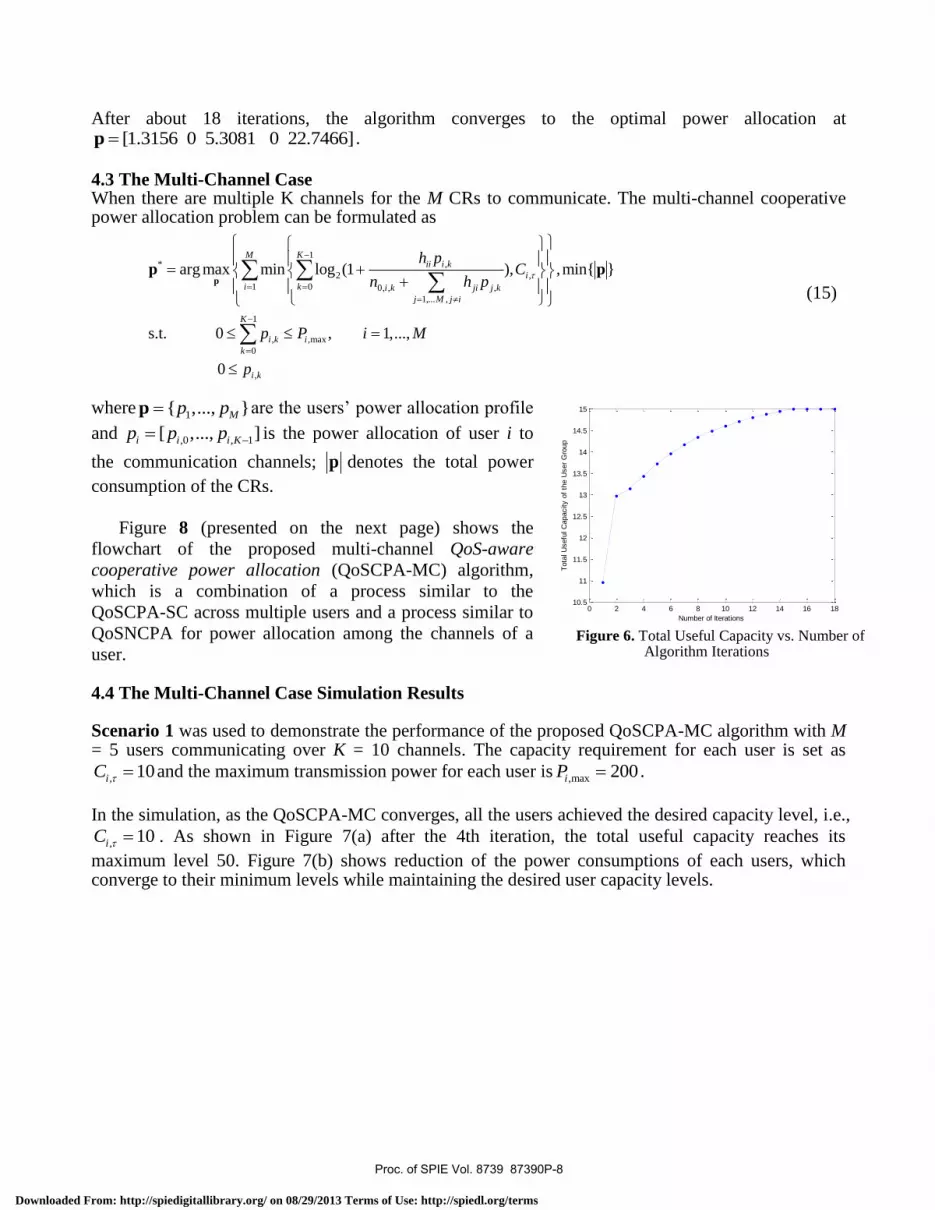
4.4 The Multi-Channel Case Simulation Results
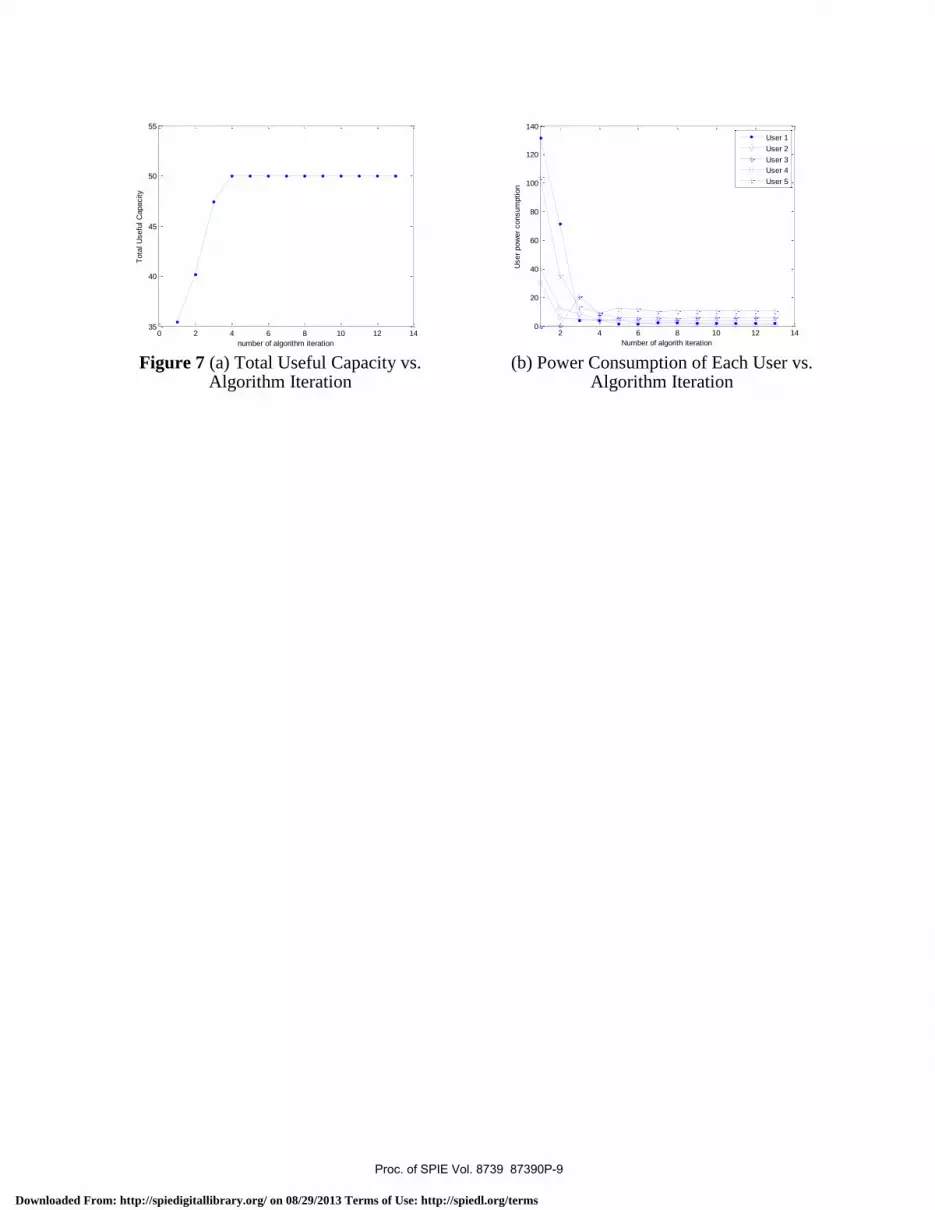
Scenario 1 was used to demonstrate the performance of the proposed QoSCPA-MC algorithm with M = 5 users communicating over K = 10 channels. The capacity requirement for each user is set as
, 10iC and the maximum transmission power for each user is ,max 200iP .
In the simulation, as the QoSCPA-MC converges, all the users achieved the desired capacity level, i.e.,
, 10iC . As shown in Figure 7(a) after the 4th iteration, the total useful capacity reaches its
maximum level 50. Figure 7(b) shows reduction of the power consumptions of each users, which converge to their minimum levels while maintaining the desired user capacity levels.
0 2 4 6 8 10 12 14 16 1810.5
11
11.5
12
12.5
13
13.5
14
14.5
15
Number of Iterations
Tota
l U
sefu
l C
apacity o
f th
e U
ser
Gro
up
Figure 6. Total Useful Capacity vs. Number of
Algorithm Iterations
Proc. of SPIE Vol. 8739 87390P-8
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms
0 2 4 6 8 10 12 1435
40
45
50
55
number of algorithm iteration
Tota
l U
sefu
l C
apacity
2 4 6 8 10 12 14
0
20
40
60
80
100
120
140
Number of algorith iteration
User
pow
er
consum
ption
User 1
User 2
User 3
User 4
User 5
Figure 7 (a) Total Useful Capacity vs.
Algorithm Iteration (b) Power Consumption of Each User vs.
Algorithm Iteration
Proc. of SPIE Vol. 8739 87390P-9
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms

Starting from an arbitrary power
allocation profile p=[p1, p2,…,pM]
pi=[pi,0,pi,1,...pi,K-1], i=1,2…,M
Evaluate the interference and capacity for each user over the k chanels
,
, 2
0, , ,
log (1 )ii i k
i k
i k i k
h pC
n I
, ,
1,... ,
,i k ji j k
j M j i
I h p
, ,
, ,
, ,
Evaluate , i k i k
i k i k
i k i k
C Cb
I p
, ,
1,
and M
i k i k ji
j j i
h
1
, ,
0
K
i k i
k
C C
3
, , ,10 ,i k i k i kp p p i k No
Yes
, 0, , ,
, ,
Adjust max ( ) / ,0max{ , }
iii k i k i k ii
i k i k
hp n I h
b
, 0i kp
,
,
,
Reevaluate andi k
i k
i k
Cb
p
,
, 2
0, , ,
log (1 )ii i k
i k
i k i k
h pC
n I
1
, ,
0
K
i k i
k
C C
1
, ,
0
K
i k i
k
C C
1
, ,max
0
K
i k i
k
p P
, , ,arg min{ }& 0i k i k i kk
l b p 1
, ,
0
Evaluate K
i k i
k
C C C
,Adjust i lp
,
0, , , ,max (2 1)( ) / ,0i lC C
i l i l i in I h
, , ,arg min{ }& 0i k i k i kk
l b p
1
, , ,
0
1( ) ( )
K
ave i k i k i k
k
b U pK
, , ,arg max{ }& 0i k i k i kk
m b p
,Adjust i lp 0, , ,
,
max ( ) / ,0iii l i l ii
ave i l
hn I h
,
0, , ,
Evaluate log(1 )ii i l
i l i l
h pC
n I
,
0, , ,
log(1 )ii i l
i l i l
h p
n I
,
, 0, , ,Adjust (2 1)( ) /i mC C
i m i m i m iip n I h
, , ,arg max{ }& 0i k i k i kk
m b p
5
, , 10i m i mb
1
, ,
0
Evaluate K
i k i
k
C C C
,Adjust i mp
,
0, , , ,
1
, ,max ,
0
(2 1)( ) / ,
min
i mC C
i m i m i i
K
i m i i k
k
n I h
p P p
, , ,arg min{ }& 0i k i k i kk
l b p
1
, , ,
0
1( ) ( )
K
ave i k i k i k
k
b U pK
, , ,arg max{ }& 0i k i k i kk
m b p
,Adjust i lp
0, , ,
,
max ( ) / ,0iii l i l ii
ave i l
hn I h
, , , ,Adjust i m i m i l i lp p p p
5
, , , ,( ) ( ) 10i m i m i l i lb b
Output power allocation profile p=[p1, p2,…,pM]
No
No
Figure 8. Flowchart of the QoSCPA-MC algorithm
5. CONCLUSIONS
In this paper, novel algorithms are proposed for QoS-aware Dynamic Spectrum Access (DSA), which
incorporate QoS requirements as useful channel capacity of communication links to the conventional
non-cooperative and cooperative DSA problems. The QoS-aware DSA non-cooperative power
allocation (QoSNCPA) and cooperative (QoSCPA) algorithms allow efficient utilization and sharing
of RF spectrum resources among CRs by maximizing the useful capacity of the CRs, which avoid the
inefficiency of QoS-blind DSA algorithms and minimize power consumption of CR systems.
Simulation results show the effectiveness and fast convergence of the proposed algorithms for single
Proc. of SPIE Vol. 8739 87390P-10
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms

and multiple channel cases. Future efforts will further explore additional practical issues and
operational constraints as initially investigated in [21] for such applications as space [22] and airborne
[23] RF jamming resistant communications.
ACKNOWLEDGEMENT
This research was supported in part by the Air Force Research Laboratory - Space Vehicles Directorate under contract number FA9453-12-M-0022. The views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies or endorsements, either expressed or implied, of the Air Force.
REFERENCES
[1] Mitola, J., III, “Cognitive radio for flexible mobile multimedia communications,” IEEE 1999 Mobile Multimedia Conference, pp. 3-1, 1999
[2] Brik, V., Rozner, E., Banerjee, S., and Bahl, P., “DSAP: a protocol for coordinated spectrum access,” Proceedings of the IEEE DySPAN Conference, pp. 611-614, 2005
[3] Robinson, D., Shukla, A., Burns, J., and Atefi, A., “Resource trading for spectrum aggregation and management,” Proceedings of the IEEE DySPAN Conference, pp. 666–671, 2005
[4] Marias, G., “Spectrum scheduling and brokering based on QoS demands of competing WISPs,” Proceedings of the IEEE DySPAN Conference, pp. 684–687, 2005
[5] Ileri, O., Samardzija, D., Sizer, T., and Mandayam, N. B., “Demand responsive pricing and competitive spectrum allocation via a spectrum server,” Proceedings of the IEEE DySPAN Conference, pp. 194–202, 2005
[6] Zhao, Q., Tong, L., and Swami, A., “Decentralized cognitive MAC for dynamic spectrum access,” Proceedings of the IEEE DySPAN Conference, pp. 224–232, 2005
[7] Xing, Y., Chandramouli, R., Mangold, S., Shankar, N.S., “Dynamic spectrum access in open spectrum wireless networks,” IEEE Journal on Selected Areas in Communications, 24 (3), pp. 626–637, 2006
[8] Ma, L., Han, X., and Shen, C., “Dynamic open spectrum sharing MAC protocol for wireless ad hoc networks,” Proceedings of the IEEE DySPAN Conference, pp. 203–213, 2005
[9] Zhao, J., Zheng, H., and Yang, G., “Distributed coordination in dynamic spectrum allocation networks,” Proceedings of the IEEE DySPAN Conference, pp. 259–268, 2005
[10] Chen, W., Fan, P., and Cao, Z., “The optimal power allocation policies with perfect channel side information and buffer state information,” The 5th International Symposium on Multi-Dimensional Mobile, vol. 1, pp. 85–89, 2004
[11] Chen, W., Fan, P., and Cao, Z., “Water filling in cellar: the optimal power allocation policy with channel and buffer state information,” IEEE ICC2005, Vol. 1, pp. 537–541, 2005
[12] Neel, J., Reed, J., and Gilles, R., “The role of game theory in the analysis of software radio networks,” SDR Forum 2002 Technical Conference, 2002
[13] Etkin, R., Parekh, A., and Tse, D., “Spectrum sharing for unlicensed bands,” Proceedings of the IEEE DySPAN Conference, pp. 251– 258, 2005
[14] Huang, J., Berry, R., and Honig, M.L. “Distributed interference compensation for wireless networks,” IEEE Journal on Selected Areas in Communications, 24 (5), pp.1074–1084, 2006
[15] Huang, J., Berry, R., and Honig, M.L., “Spectrum sharing with distributed interference compensation,” Proceedings of the IEEE DySPAN Conference, pp. 88–93, 2005
Proc. of SPIE Vol. 8739 87390P-11
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms

[16] Huang, J., Berry, R., and Honig, M.L., “A game theoretic analysis of distributed power control for spread spectrum ad hoc networks,” IEEE International Symposium on Information Theory, Adelaide, Australia, 2005
[17] Zou, C. et al. “QoS-aware distributed spectrum sharing for heterogeneous wireless cognitive networks” Computer Networks, Vol. 52, pp. 864–878, 2008
[18] Tian, Z., Blasch, E., Li, W., Chen, G., and Li, X., “Performance Evaluation of Distributed Compressed Wideband Sensing for Cognitive Radio Networks,” Int. Conf. on Info Fusion, 2008
[19] Blasch, E., Busch, T., Kumar, S., and Pham, K. “Trends in Survivable/Secure Cognitive Networks,” IEEE Int’l Conf, on Computing, Networking, and Communications, 2013
[20] Saraydar, C. U., Mandayam, N. B. and Goodman, D. J., “Efficient power control via pricing in wireless data networks,” IEEE Trans. Communication, 50, 2, pp. 291–303, 2002
[21] Tian, X., Tian, Z., Pham, K., Blasch, E., Chen, G., and Shen, D., “Jamming/Anti-jamming Game with a Cognitive Jammer in Space Communication,” Proc. SPIE, Vol. 8385, 2012
[22] Shen, D., Chen, G., Pham, K., and Blasch, E., “Game Models in frequency hopping based proactive jamming mitigation in space communication networks,” Proc. SPIE, Vol. 8385, 2012
[23] Tian, X., Bar-Shalom, Y., Chen, G., Blasch, E., and Pham, K., “A Unified Cooperative Control Architecture for UAV Missions,”
Proc. SPIE, Vol. 8402, 2012
Proc. of SPIE Vol. 8739 87390P-12
Downloaded From: http://spiedigitallibrary.org/ on 08/29/2013 Terms of Use: http://spiedl.org/terms