programación y métodos numéricos (guía-ejercicios) instituto politÉcnico nacional
TRANSCRIPT
Programación y Métodos Numéricos (guía-ejercicios)
INSTITUTO POLITÉCNICO NACIONAL
ESIME UNIDAD AZCAPOTZALCO
INTERPOLACIÓN
INTERPOLACIÓN FORMULA DE NEWTON
PROGRAMACIÓN Y MÉTODOS NUMÉRICOS INTERPOLACIÓN POLINÓMICA DE HERMITE: PLANTEAMIENTO Y CASO DE PRIMER ORDEN
PROGRAMACIÓN Y MÉTODOS NUMÉRICOS: INTEGRACIÓN NUMÉRICA- FÓRMULAS DE TIPO INTERPOLATORIO
MÉTODO DE GAUSS – SEIDEL
RESOUCION DE SISTEMAS DE ECUACIONES LINEALES, METODO DE GRADIENTE CON PASO ÓPTIMO
PROGRAMACIÓN Y MÉTODOS NUMÉRICOS RESOLUCIÓN DE ECUACIONES NO LINEALES: MÉTODO DE APROXIMACIONES SUCESIVAS
METODO DE SOBREITERACIONNEWTON – RAPHSON
PROGRAMACIÓN Y MÉTODOS NUMÉRICOS RESOLUCIÓN DE ECUACIONES NO LINEALES: SISTEMAS DE ECUACIONES NO LINEALES
17Departamento de Matemática Aplicada y Métodos Informáticos
Universidad Politécnica de Madrid Ingeniería de Minas
OBJETIVOSOBJETIVOS
1º. Conocer el problema general de interpolación polinomial
2º. Calcular polinomios interpoladores de Lagrange a través de laresolución de un sistema de ecuaciones
3º. Conocer y definir los polinomios de base de Lagrange del espacio de polinomios de grado menor o igual que n asociadosa un soporte de (n+1) puntos distintos.
4º. Calcular polinomios interpoladores de Lagrange utilizando lospolinomios de base de Lagrange.
18Departamento de Matemática Aplicada y Métodos Informáticos
Universidad Politécnica de Madrid Ingeniería de Minas
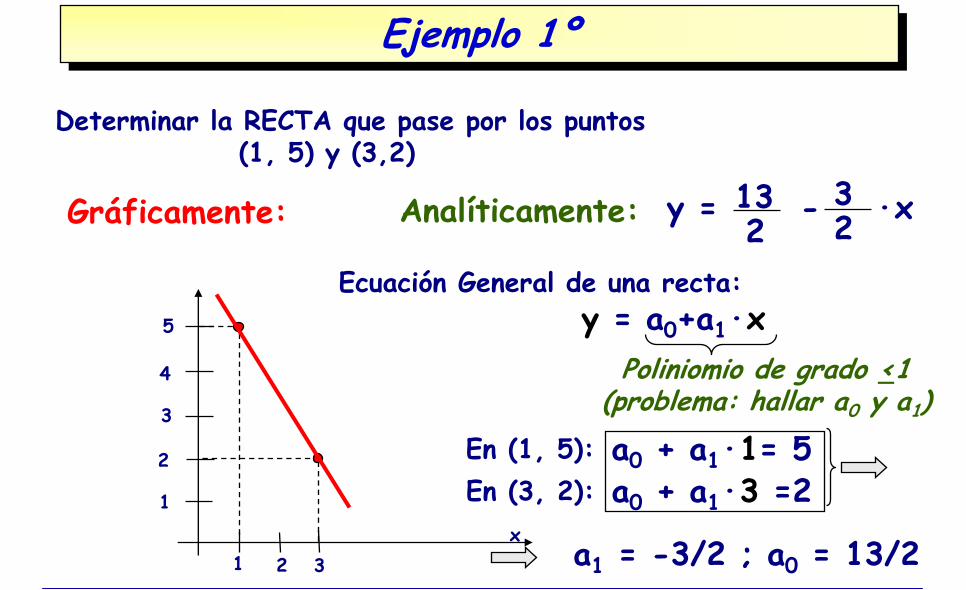
Ejemplo 1ºEjemplo 1º
Determinar la RECTA que pase por los puntos (1, 5) y (3,2)
Gráficamente:
1
2
3
4
5
1 2 3
Analíticamente:
Ecuación General de una recta:y = a0+a1·x
x
Poliniomio de grado <1(problema: hallar a0 y a1)
En (1, 5): a0 + a1·1= 5En (3, 2): a0 + a1·3 =2
a1 = -3/2 ; a0 = 13/2
y = - ·x32
132
19Departamento de Matemática Aplicada y Métodos Informáticos
Universidad Politécnica de Madrid Ingeniería de Minas
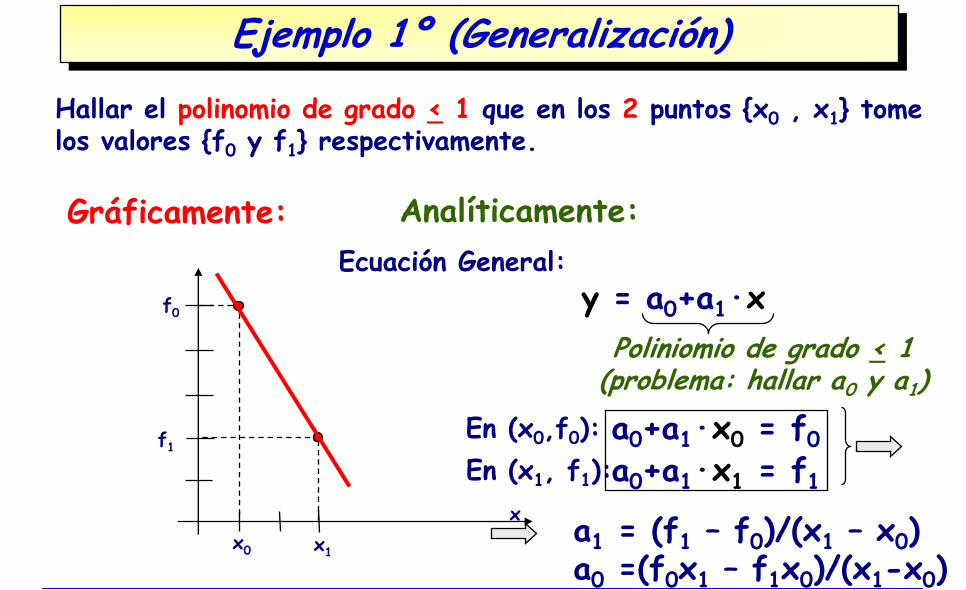
Ejemplo 1º (Generalización)Ejemplo 1º (Generalización)
Hallar el polinomio de grado < 1 que en los 2 puntos {x0 , x1} tomelos valores {f0 y f1} respectivamente.
Gráficamente:
f1
f0
x0 x1
Analíticamente:Ecuación General:
y = a0+a1·x
x
Poliniomio de grado < 1(problema: hallar a0 y a1)
En (x0,f0): a0+a1·x0 = f0En (x1, f1):a0+a1·x1 = f1
a1 = (f1 – f0)/(x1 – x0)a0 =(f0x1 – f1x0)/(x1-x0)
47Departamento de Matemática Aplicada y Métodos Informáticos
Universidad Politécnica de Madrid Ingeniería de Minas
OBJETIVOSOBJETIVOS
1º. Conocer el concepto de diferencia dividida de orden k definidaen k puntos de un soporte.
2º. Obtener el polinomio interpolador de Lagrange de una funciónutilizando la fórmula de Newton en diferencias divididas.
3º. Conocer las principales propiedades de las diferencias divididas.
4º. Particularizar la fórmula de Newton al caso de soportesequidistantes: Fórmulas en diferencias finitas.
48Departamento de Matemática Aplicada y Métodos Informáticos
Universidad Politécnica de Madrid Ingeniería de Minas
NOTACIÓNNOTACIÓN
Soporte de interpolación formado por los (n+1) puntos distintos:{x0, x1, …, xn}
Valores de una función f(x) en los (n+1) puntos del soporte:{f0, f1, …, fn}
PROBLEMA
Calcular el polinomio p(x) que interpola en el sentido deLagrange a la función f(x) sobre el soporte {x0, …, xn}
1ª forma de resolverlo: Usando la fórmula de Lagrange
49Departamento de Matemática Aplicada y Métodos Informáticos
Universidad Politécnica de Madrid Ingeniería de Minas
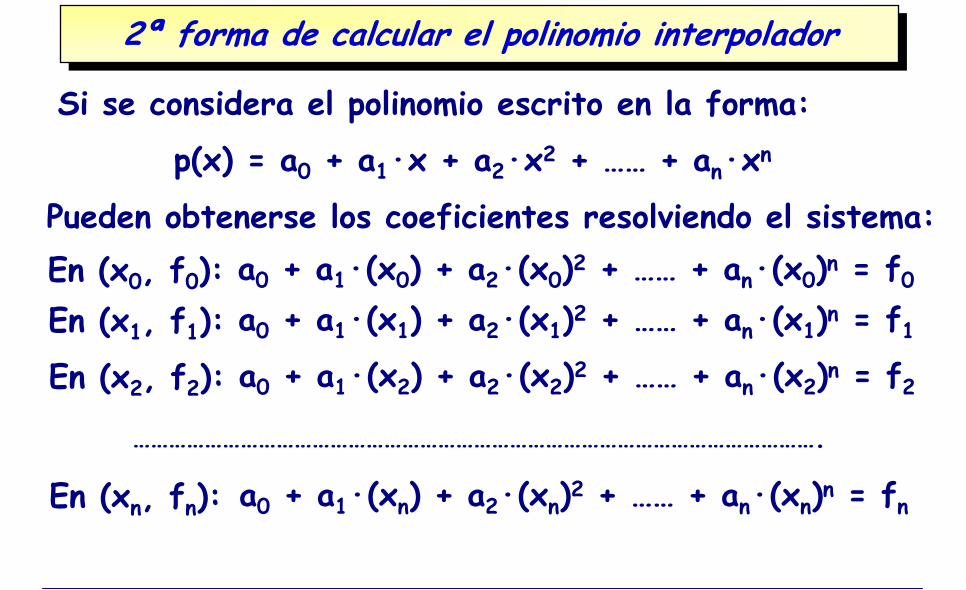
2ª forma de calcular el polinomio interpolador2ª forma de calcular el polinomio interpolador
Si se considera el polinomio escrito en la forma:
p(x) = a0 + a1·x + a2·x2 + …… + an·xn
Pueden obtenerse los coeficientes resolviendo el sistema:En (x0, f0): a0 + a1·(x0) + a2·(x0)2 + …… + an·(x0)n = f0
En (x1, f1): a0 + a1·(x1) + a2·(x1)2 + …… + an·(x1)n = f1
En (x2, f2): a0 + a1·(x2) + a2·(x2)2 + …… + an·(x2)n = f2
En (xn, fn): a0 + a1·(xn) + a2·(xn)2 + …… + an·(xn)n = fn
…………………………………………………………………………………………………….
50Departamento de Matemática Aplicada y Métodos Informáticos
Universidad Politécnica de Madrid Ingeniería de Minas
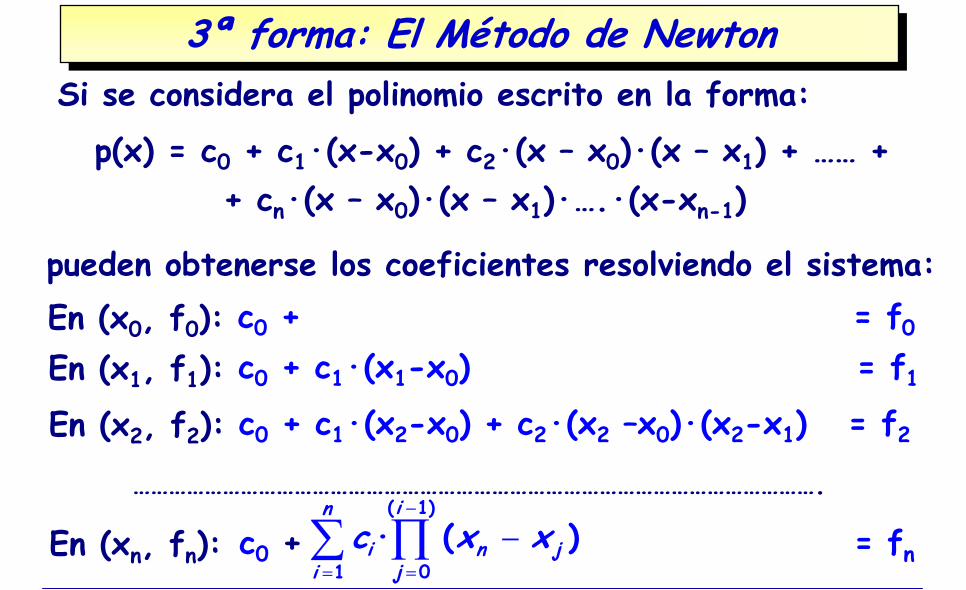
3ª forma: El Método de Newton3ª forma: El Método de NewtonSi se considera el polinomio escrito en la forma:
p(x) = c0 + c1·(x-x0) + c2·(x – x0)·(x – x1) + …… +
pueden obtenerse los coeficientes resolviendo el sistema:En (x0, f0): c0 + = f0
En (x1, f1): c0 + c1·(x1-x0) = f1
En (x2, f2): c0 + c1·(x2-x0) + c2·(x2 –x0)·(x2-x1) = f2
En (xn, fn): c0 + = fn
…………………………………………………………………………………………………….( 1)
01· ( )
in
i n jji
c x x−
==
−∏∑
+ cn·(x – x0)·(x – x1)·….·(x-xn-1)
55Departamento de Matemática Aplicada y Métodos Informáticos
Universidad Politécnica de Madrid Ingeniería de Minas
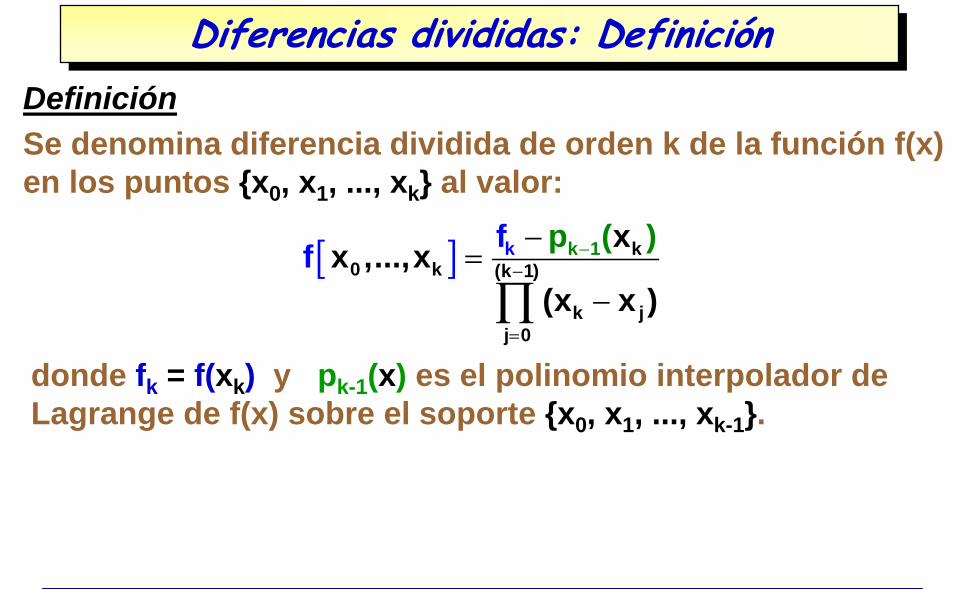
Diferencias divididas: DefiniciónDiferencias divididas: DefiniciónDefiniciónSe denomina diferencia dividida de orden k de la función f(x)en los puntos {x0, x1, ..., xk} al valor:
[ ] −−
=
−=
−∏k
0k
k (k 1)
k jj 0
1k xfx ,...,x(x
p
)
(
xf )
donde fk = f(xk) y pk-1(x) es el polinomio interpolador deLagrange de f(x) sobre el soporte {x0, x1, ..., xk-1}.
63Departamento de Matemática Aplicada y Métodos Informáticos
Universidad Politécnica de Madrid Ingeniería de Minas
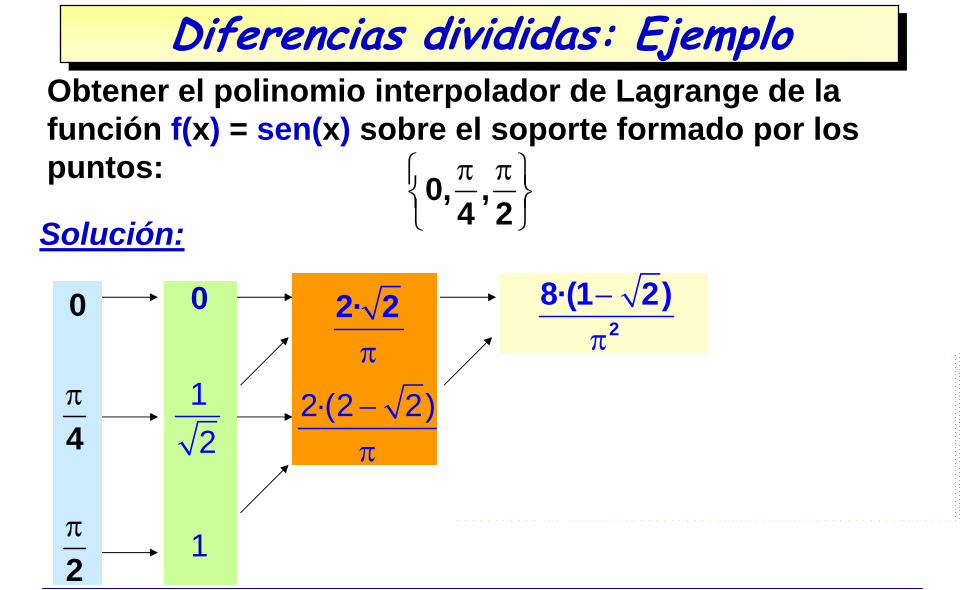
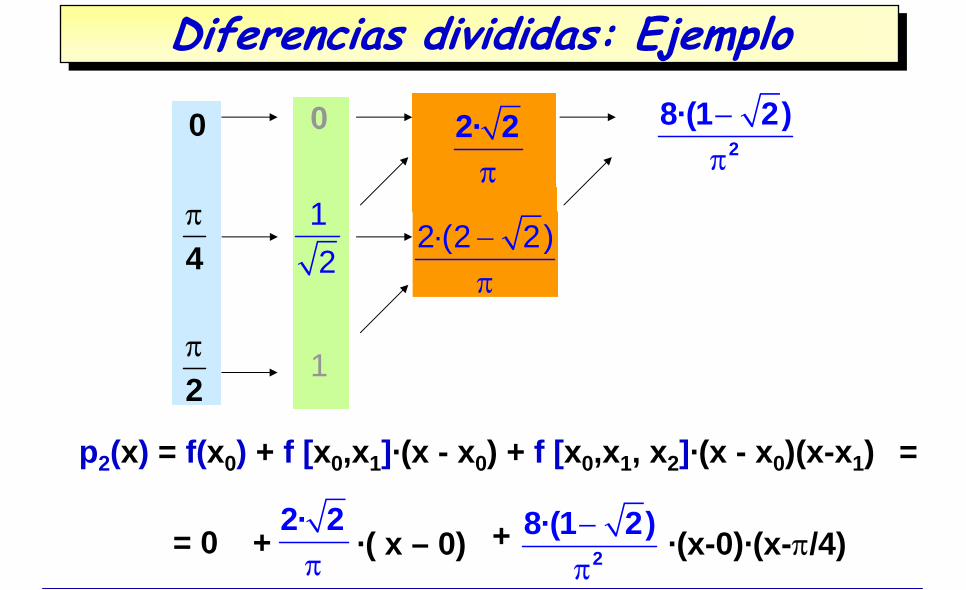
Diferencias divididas: EjemploDiferencias divididas: EjemploObtener el polinomio interpolador de Lagrange de la función f(x) = sen(x) sobre el soporte formado por los puntos: π π⎧ ⎫
⎨ ⎬⎩ ⎭0, ,
4 2Solución:
x0
x1
x2
f(x0)
f(x1)
f(x2)
f[x0, x1]
f[x1, x2]
f[x0, x1 , x2]0
π4
π2
0
12
1
f[x0, x1] =−−1
1
0
0
xf
xf −
=π−
1 0
4
2
0
π2· 2
f[x1, x2] =−−2
2
1
1
xf
xf −
=π π−
112
2 4
−π
2·(2 2)f[x0,x1 ,x2] =
[ ] [ ]−−
1 2 0 1
2 0
x ,x x ,xx
fxf
−π2
8·(1 2)
64Departamento de Matemática Aplicada y Métodos Informáticos
Universidad Politécnica de Madrid Ingeniería de Minas
Diferencias divididas: EjemploDiferencias divididas: Ejemplo
p2(x) = f(x0) + f [x0,x1]·(x - x0) + f [x0,x1, x2]·(x - x0)(x-x1)
0
π4
π2
0
12
1
π2· 2 −
π28·(1 2)
−π
2·(2 2)
=
= 0 +π
2· 2·( x – 0) + −
π28·(1 2) ·(x-0)·(x-π/4)
Departamento de Matemática Aplicada y Métodos Informáticos 121
Universidad Politécnica de Madrid Ingeniería de Minas
OBJETIVOSOBJETIVOS
1º. Conocer el problema de interpolación de Hermite.
2º. Calcular el polinomio interpolador de Hermite que ajustesobre un soporte dado el valor de una función y el de susprimeras derivadas.
Departamento de Matemática Aplicada y Métodos Informáticos 122
Universidad Politécnica de Madrid Ingeniería de Minas
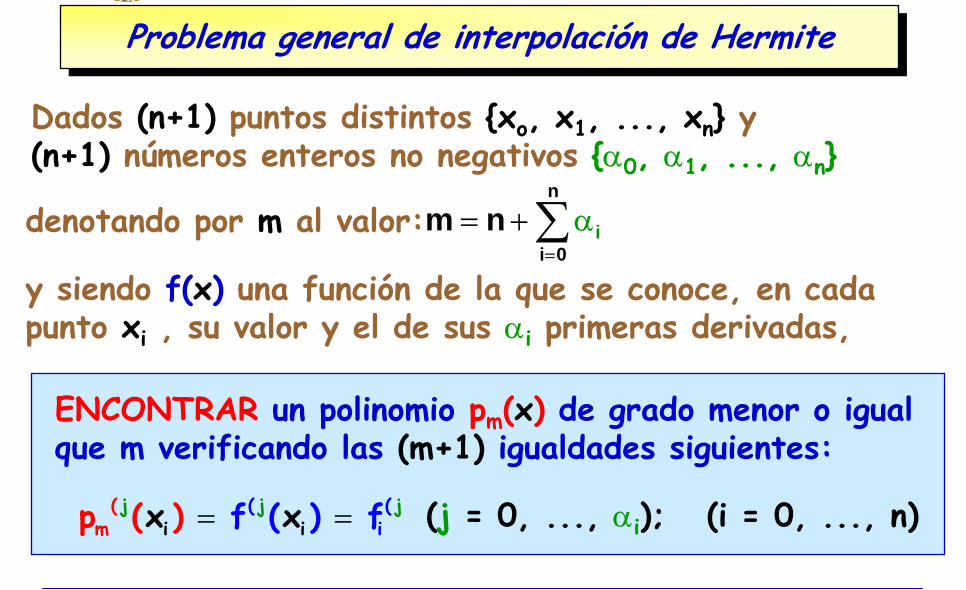
Dados (n+1) puntos distintos {xo, x1, ..., xn} y(n+1) números enteros no negativos {α0, α1, ..., αn}
denotando por m al valor: i
n
i 0m n
=
+ α= ∑y siendo f(x) una función de la que se conoce, en cada punto xi , su valor y el de sus αi primeras derivadas,
ENCONTRAR un polinomio pm(x) de grado menor o igual que m verificando las (m+1) igualdades siguientes:
(j jm
j(i ii
( f ((x x )p f) = = (j = 0, ..., αi); (i = 0, ..., n)
Problema general de interpolación de HermiteProblema general de interpolación de Hermite
Departamento de Matemática Aplicada y Métodos Informáticos 125
Universidad Politécnica de Madrid Ingeniería de Minas
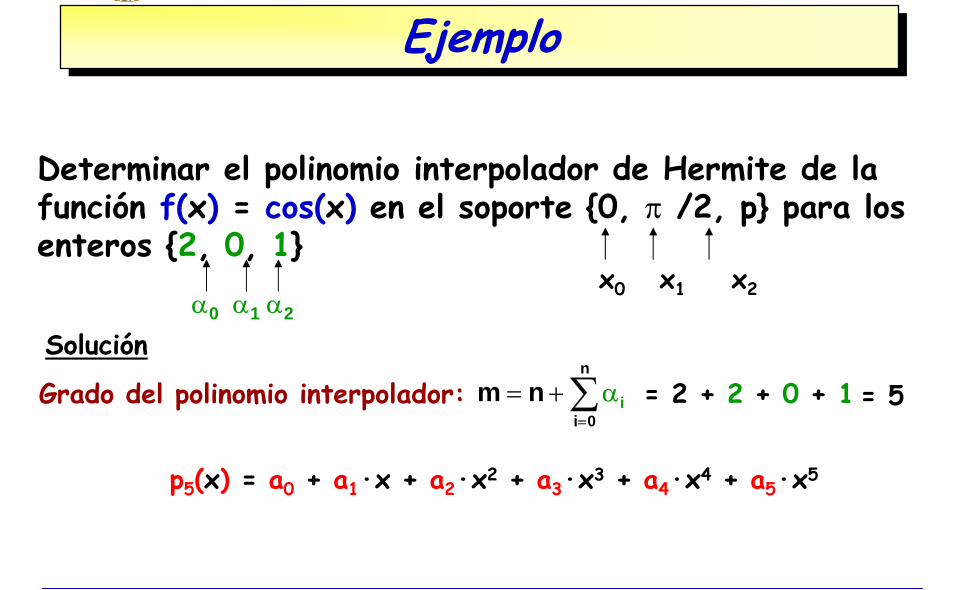
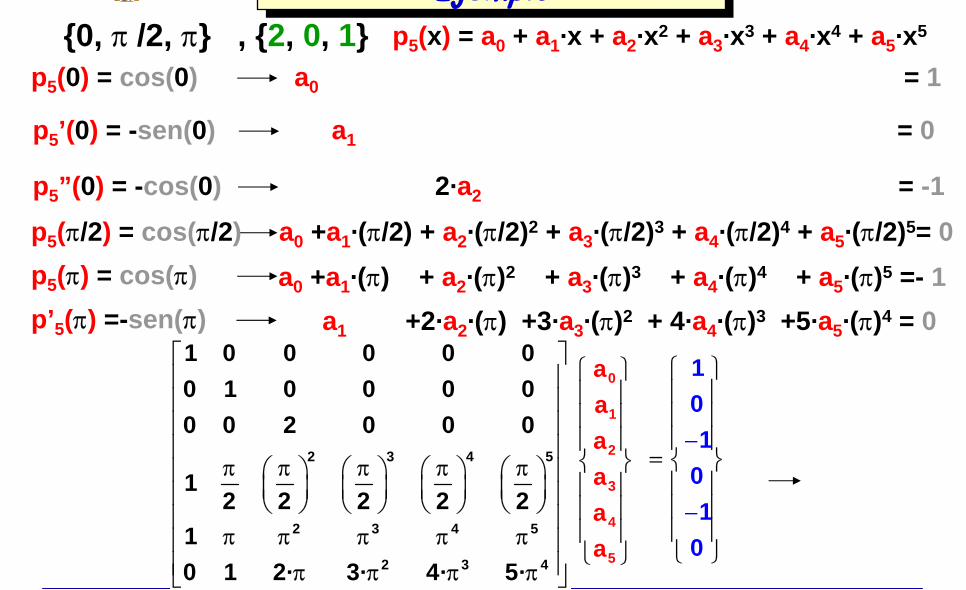
Determinar el polinomio interpolador de Hermite de la función f(x) = cos(x) en el soporte {0, π /2, p} para los enteros {2, 0, 1}
Solución
x0 x1 x2α0 α1 α2
Grado del polinomio interpolador: i
n
i 0m n
=
+ α= ∑ = 2 + 2 + 0 + 1 = 5
p5(x) = a0 + a1·x + a2·x2 + a3·x3 + a4·x4 + a5·x5
EjemploEjemplo
Departamento de Matemática Aplicada y Métodos Informáticos 126
Universidad Politécnica de Madrid Ingeniería de Minas
p5(x) = a0 + a1·x + a2·x2 + a3·x3 + a4·x4 + a5·x5
p5(0) = cos(0) a0 = 1
p5’(0) = -sen(0) a1 = 0
p5”(0) = -cos(0) 2·a2 = -1
{0, π /2, π} , {2, 0, 1}
p5(π/2) = cos(π/2) a0 +a1·(π/2) + a2·(π/2)2 + a3·(π/2)3 + a4·(π/2)4 + a5·(π/2)5= 0p5(π) = cos(π) a0 +a1·(π) + a2·(π)2 + a3·(π)3 + a4·(π)4 + a5·(π)5 =- 1p’5(π) =-sen(π) a1 +2·a2·(π) +3·a3·(π)2 + 4·a4·(π)3 +5·a5·(π)4 = 0
2 3 4 5
2 3 4 5
2 3 4
1 0 0 0 0 00 1 0 0 0 00 0 2 0 0 0
12 2 2 2 2
10 1 2· 3· 4· 5·
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
π π π π π⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎢ ⎥⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎢ ⎥
π π π π π⎢ ⎥⎢ ⎥π π π π⎣ ⎦
0
1
2
3
4
5
aaaaaa
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
101
01
0
⎧ ⎫⎪ ⎪⎪ ⎪⎪−
−
⎪= ⎨ ⎬
⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
EjemploEjemplo
Departamento de Matemática Aplicada y Métodos Informáticos 127
Universidad Politécnica de Madrid Ingeniería de Minas
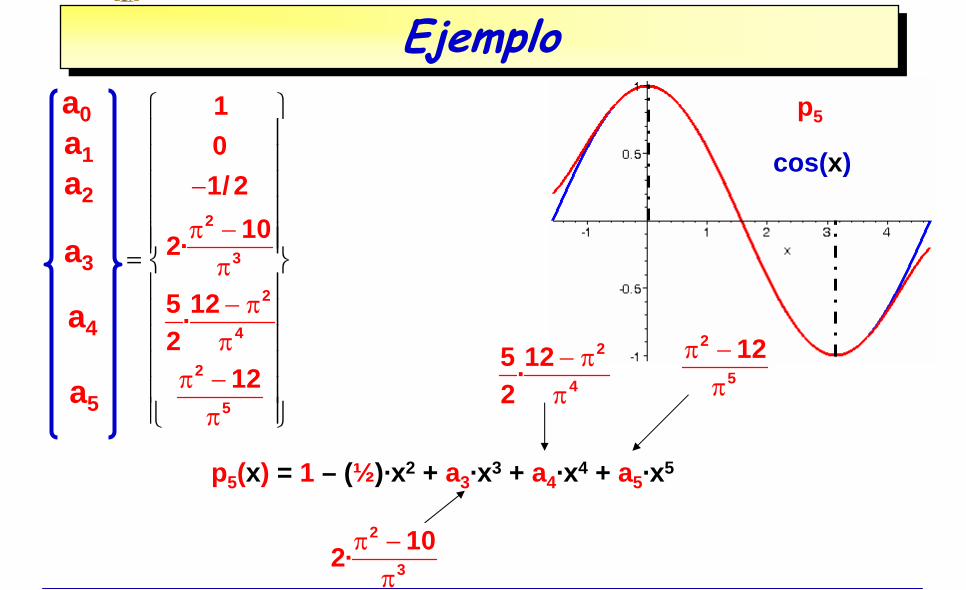
p5
cos(x)
2
3
2
4
2
5
101/ 2
102·
5 12·2
12
−
π −π− ππ
π −π
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
p5(x) = 1 – (½)·x2 + a3·x3 + a4·x4 + a5·x5
2
3102·π −
π
2
45 12·2
− ππ
2
512π −
π
a0a1a2
a3
a4
a5
EjemploEjemplo
Departamento de Matemática Aplicada y Métodos Informáticos – ETSIM - UPM13
Definición y primeras propiedadesDefinición y primeras propiedades
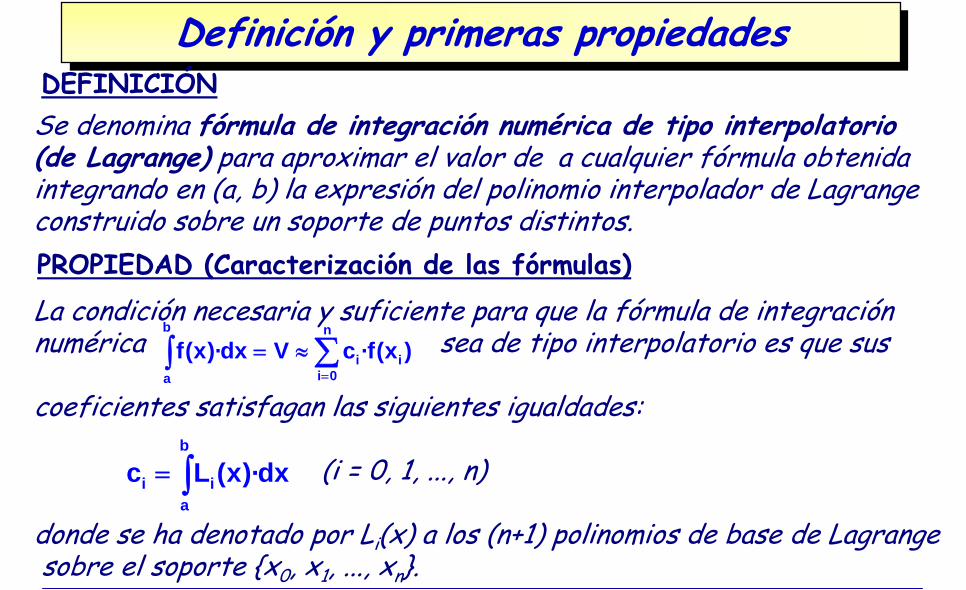
Se denomina fórmula de integración numérica de tipo interpolatorio(de Lagrange) para aproximar el valor de a cualquier fórmula obtenida integrando en (a, b) la expresión del polinomio interpolador de Lagrangeconstruido sobre un soporte de puntos distintos.
DEFINICIÓN
La condición necesaria y suficiente para que la fórmula de integración numérica sea de tipo interpolatorio es que sus
coeficientes satisfagan las siguientes igualdades:
(i = 0, 1, ..., n)
donde se ha denotado por Li(x) a los (n+1) polinomios de base de Lagrangesobre el soporte {x0, x1, ..., xn}.
b n
i ii 0a
f(x)·dx V c ·f(x )=
= ≈ ∑∫
PROPIEDAD (Caracterización de las fórmulas)
b
i ia
c L (x)·dx= ∫
Departamento de Matemática Aplicada y Métodos Informáticos – ETSIM - UPM14
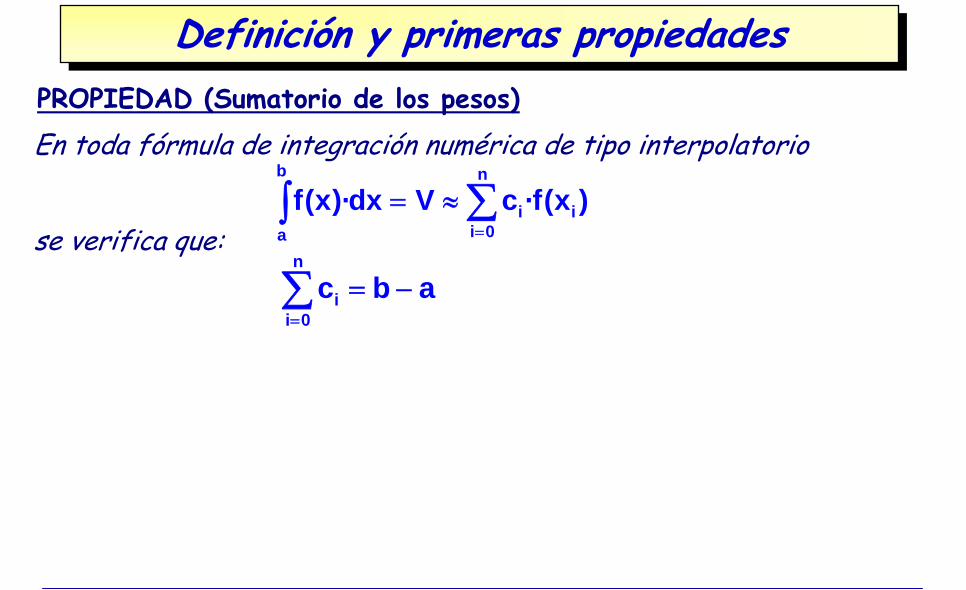
Definición y primeras propiedadesDefinición y primeras propiedades
En toda fórmula de integración numérica de tipo interpolatorio
se verifica que:
b n
i ii 0a
f(x)·dx V c ·f(x )=
= ≈ ∑∫
PROPIEDAD (Sumatorio de los pesos)
n
ii 0
c b a=
= −∑
Departamento de Matemática Aplicada y Métodos Informáticos – ETSIM - UPM17
EjemploEjemplo
b b1
0 00 1a a
x xc L (x)·dx dxx x−
= =−∫ ∫
b b0
1 11 0a a
x xc L (x)·dx dxx x−
= =−∫ ∫
b
0 0 1 1a
f(x)·dx c ·f(x ) c ·f(x )≈ +∫
Considérese el soporte {x0, x1} y sean:
La fórmula es, al menos, de
orden de exactitud 1 sea cual sea la elección de {x0, x1}.
Justificación: Es de tipo interpolatorio y basta aplicar el teorema 1
Departamento de Matemática Aplicada y Métodos Informáticos – ETSIM - UPM18
EjemploEjemplo
b
0 1a
(x x )·(x x )·dx 0− − =∫
Para que sea de orden 2 basta con que se verifique:
Justificación: Es de tipo interpolatorio y basta aplicar el teorema 2
es decir
2 2 3 30 1 0 1 0 0
1 1(b x ) ·(b x ) (a x ) ·(a x ) · (b x ) (a x ) 02 6⎡ ⎤ ⎡ ⎤− − − − − − − − − =⎣ ⎦ ⎣ ⎦
Por ejemplo, si tomamos (decisión libre) x0 = a, se tiene que escogerx1 = (a + 2·b)/3 (posición dada por la relación anterior)
Departamento de Matemática Aplicada y Métodos Informáticos – ETSIM - UPM19
EjemploEjemplo
b
0 1a
(x x )·(x x )·dx 0− − =∫
( ) ( ) ( )3 3 2 24 40 1 0 1x x · b a x ·x · b ab a - + = 0
4 3 2+ − −−
( ) ( ) ( )2 20 13 3
0 1
x x · b a1 b -a - +x ·x ·(b-a) = 03 2
+ −
Para que sea de orden 3 basta con que se verifiquen las igualdades:
Justificación: Es de tipo interpolatorio y basta aplicar el teorema 2
es decir
Lo que conduce a tomar:
0 1a b b a a b b ax ; x
2 22 3 2 3+ − + −
= − = +
Por el teorema 3 no existen fórmulas de 2 puntos y orden igual o mayor a 4
b
0 1a
x·(x x )·(x x )·dx 0− − =∫
������������������ ����� ������������������ ���� �/
� ���������������������������� �����������������
�����������"������������������������������������0��� ������' � ��)( �����
&�����������������������������123&�����������������������������123
������������������ ����� ������������������ ���� �4
� ���������������������������� �����������������
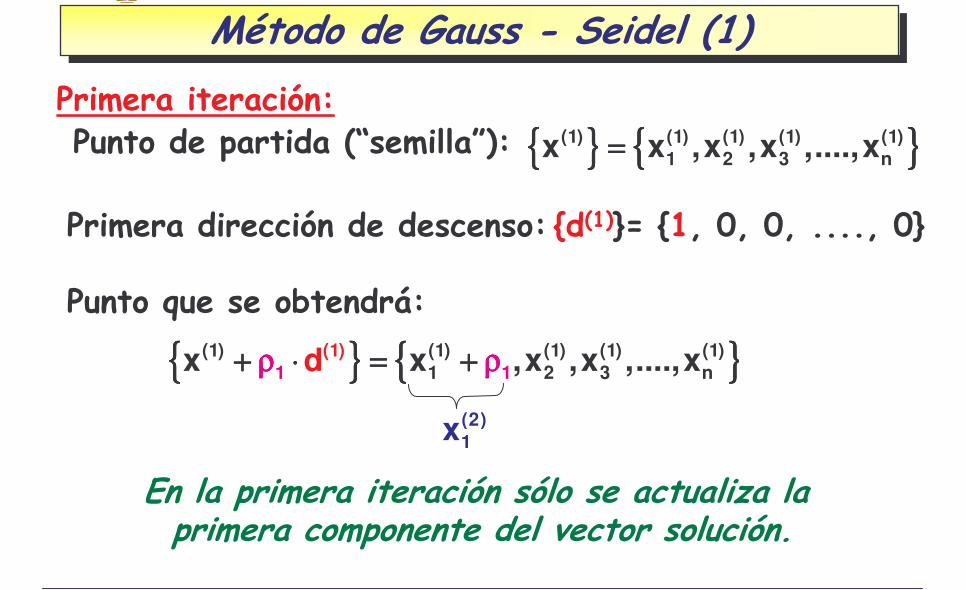
�������������������������" 5�1236752,.,.,8888,.6
� �����������19�������:3"{{{{ }}}} {{{{ }}}}(1) (1) (1) (1) (1)1 2 3 nx x ,x ,x ,....,x====
� ��; ���<����� "
{{{{ }}}} {{{{ }}}}(1) (1) (1) (1) (1
1)1 2 3
)1 n
(1x x ,x ,x ,....,xd ρρρρ⋅ = +⋅ = +⋅ = +⋅ = +ρρρρ++++
(2)1x
&��������������������������� ���+���������������������������� ����8
����������������"
������' � ��) ( ����� 123������' � ��) ( ����� 123
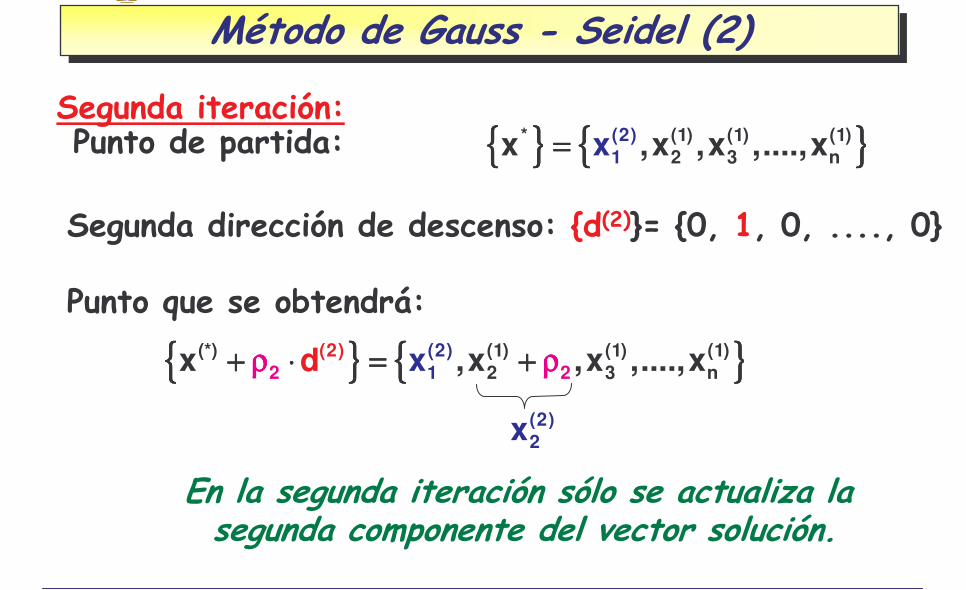
������������������ ����� ������������������ ���� =.
� ���������������������������� �����������������
( �� ���������������������" 5�1-3675.,2,.,8888,.6
� �����������" {{{{ }}}} {{{{ }}}}* (1) (1) (1)2 3 n
(2)1x ,x ,x ,....,xx====
� ��; ���<����� "
{{{{ }}}} {{{{ }}}}(*) (1) (1) (12 2
)2 3 n1
2) (2)(x ,x ,x ,... ,x xd .+ ⋅ = ++ ⋅ = ++ ⋅ = ++ ⋅ = +ρ ρρ ρρ ρρ ρ
(2)2x
&������ �������������������� ���+������ ��������������������� ����8
( �� ������������"
������' � ��) ( ����� 1-3������' � ��) ( ����� 1-3
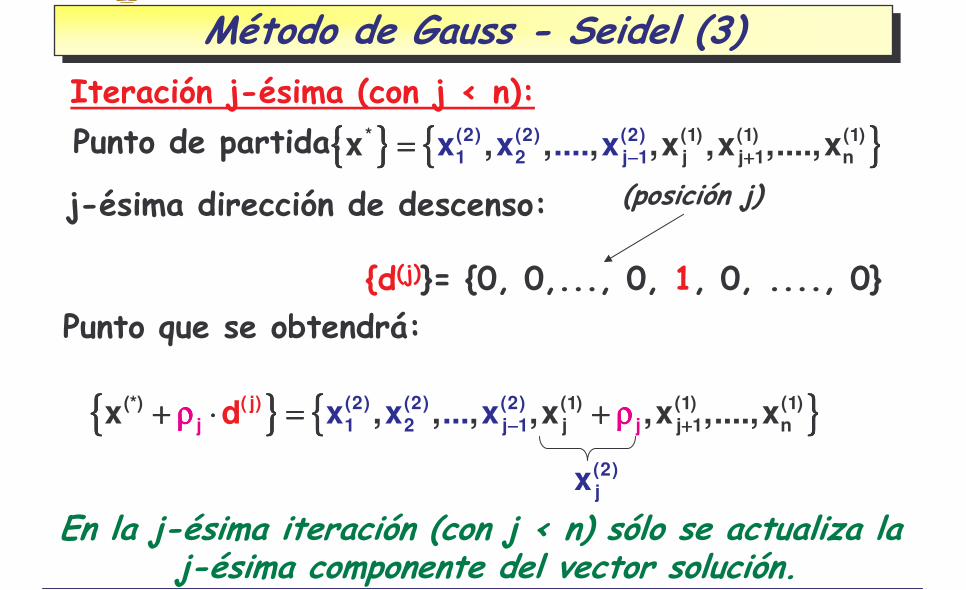
������������������ ����� ������������������ ���� =2
� ���������������������������� �����������������
0)����� ������������������"
5�103675.,.,888,.,2,.,8888,.6
� �����������"{{{{ }}}} {{{{ }}}}(2) (2) (2)* (1)1 2 j 1
(1) (1)j j 1 nx , , , ,x ,x ,....,x x .... x x++++−−−−====
� ��; ���<����� "
{{{{ }}}} {{{{ }}}}(2) (2) (2)1 2 j 1
(*) (1) (1) (1)j j 1 n
jj
( )jx , , , ,x ,x ,....,x x ..d x. x −−−− ++++ρρρρ+ ⋅+ ⋅+ ⋅+ ⋅ ρρρρ= += += += +
(2)jx
&���0)����� ���������1��0>�3�������� ���+���0)����� ������������������ ����8
���������0)����� 1��0>�3"
1�������03
������' � ��) ( ����� 1�3������' � ��) ( ����� 1�3
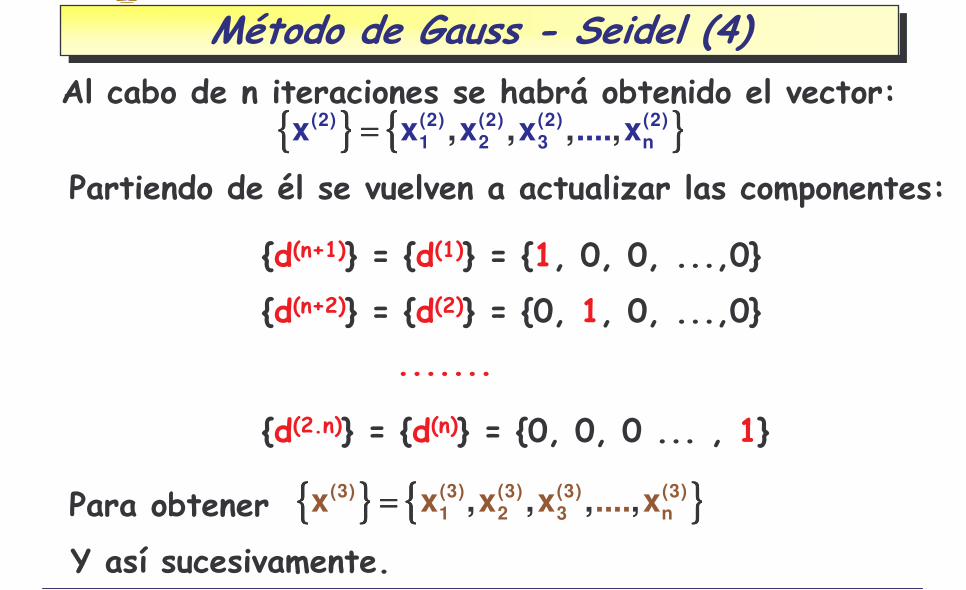
������������������ ����� ������������������ ���� =-
� ���������������������������� �����������������
� ���<���������������?�<� <������������"{{{{ }}}} {{{{ }}}}(2) (2) (2) (2) (2)
1 2 3 n, , ,x x x x .,... x====
��������������� ��������� ���+��������������"
5�1�@23675�1236752,.,.,888,.6
5�1�@-3675�1-3675.,2,.,888,.6
5�1-8�3675�1�3675.,.,.888,26
8888888
����<����� {{{{ }}}} {{{{ }}}}(3) (3) (3) (3) (3)1 2 3 n, , ,x x x x .,... x====
A��� � �����������8
������' � ��) ( ����� 1=3������' � ��) ( ����� 1=3
Departamento de Matemática Aplicada y Métodos Informáticos 48
Universidad Politécnica de Madrid Ingeniería de Minas
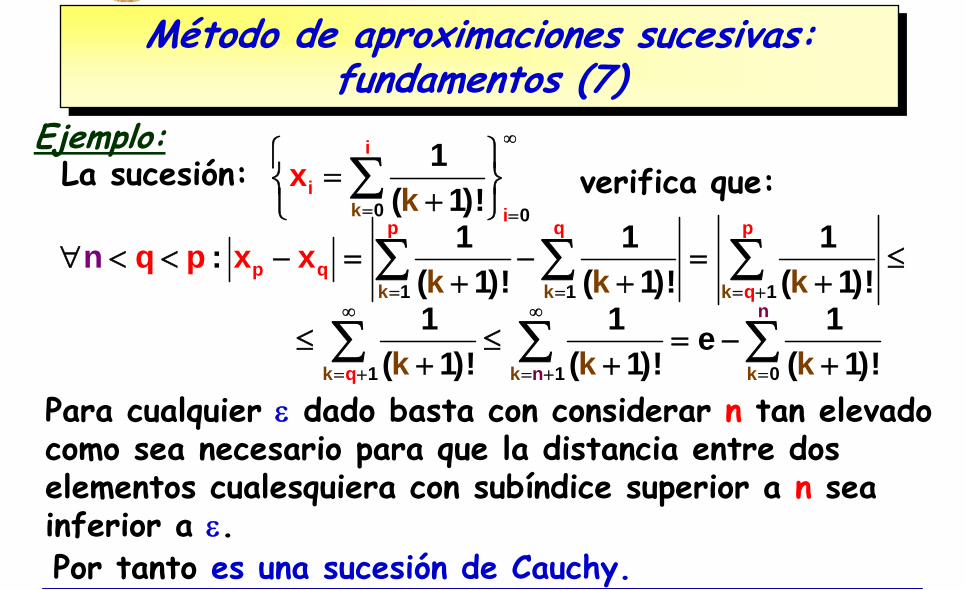
Ejemplo:La sucesión:
0
i
ik 0i
1( !1)k
x∞
= =
⎧ ⎫=⎨ ⎬
⎩ ⎭+∑ verifica que:
k k
p q p
p qq1 1 k 1
1 1 1:( 1)! (
q p x x1)!k k k
n( 1)!= = = +
∀ < < − = − = ≤+ + +∑ ∑ ∑
qk k k1 0n 1
n1 1 1e( 1)! ( 1)! ( 1)k !k k
∞ ∞
= + = + =
≤ ≤ = −+ + +∑ ∑ ∑
Para cualquier ε dado basta con considerar n tan elevadocomo sea necesario para que la distancia entre dos elementos cualesquiera con subíndice superior a n seainferior a ε.Por tanto es una sucesión de Cauchy.
Método de aproximaciones sucesivas: fundamentos (7)
Método de aproximaciones sucesivas: fundamentos (7)
������������������ ����� ������������������ ���� �@
� ���������������������������� �����������������
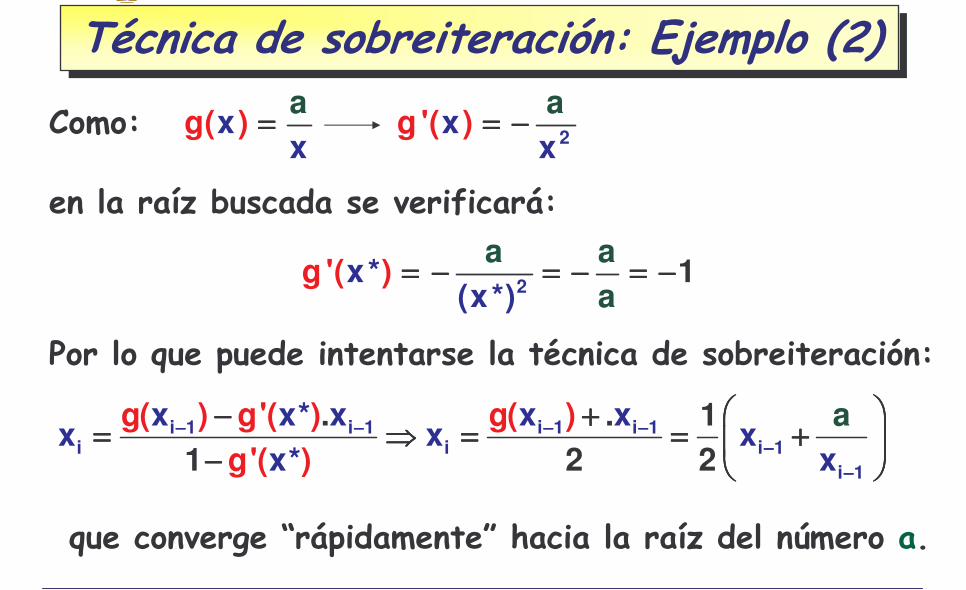
4�" g(x)xa==== 2x
'(xg )a= −= −= −= −
�������$# ���������������� "
2x*(x
g '*)
( 1a
a)
a= − = − = −= − = − = −= − = − = −= − = − = −
���5 �� �������������������������#�����������"
i 1 i 1 i 1 i 1i i i 1
i 1
g( ) g'( ) g( )g'( )
x x* x x xx x x
x*.
2 x. 1
1 2a− − − −− − − −− − − −− − − −
−−−−−−−−
� �� �� �� �− +− +− +− +==== ���� = = += = += = += = +� �� �� �� �−−−− � �� �� �� �
5 ��������A� ���������B 2���������$����:����.
/���������#�����������"=?����,&-/���������#�����������"=?����,&-
������������������ ����� ������������������ ���� �(
� ���������������������������� �����������������
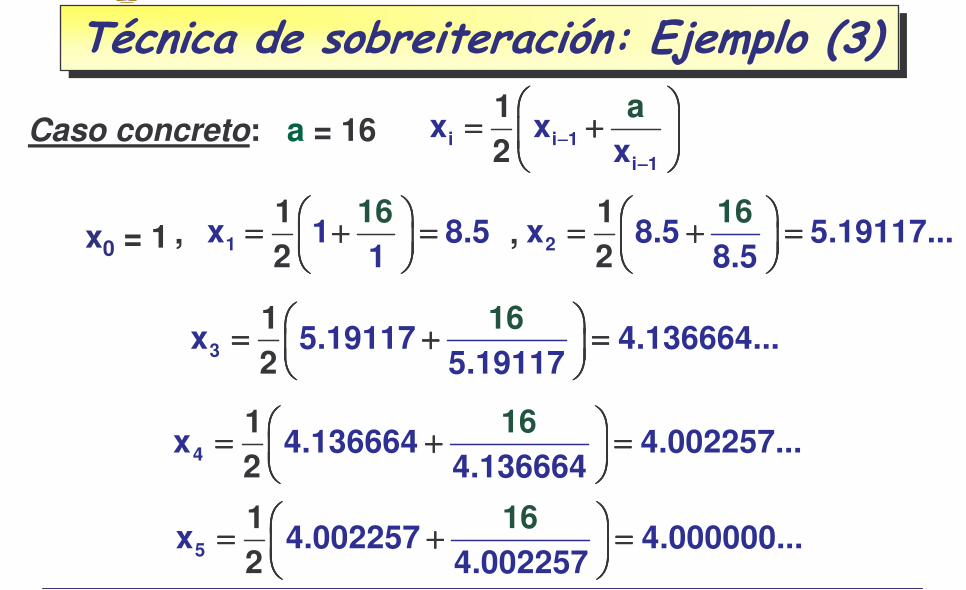
Caso concreto: a = 16 i i 1i 1
a1x2
x x −−−−−−−−
� �� �� �� �= += += += +� �� �� �� �
� �� �� �� �
x0 = 1 1x 112
8.16
51
� �� �� �� �= + == + == + == + =� �� �� �� �� �� �� �� �
, 2x 8.5 5.19117...8.5161
2� �� �� �� �= + == + == + == + =� �� �� �� �� �� �� �� �
,
3x 5.19117 4.136664...5.19117
1 162� �� �� �� �= + == + == + == + =� �� �� �� �� �� �� �� �
4x 4.136664 4.002257...4.1366642
161 � �� �� �� �= + == + == + == + =� �� �� �� �� �� �� �� �
5x 4.002257 4.000000...4.0022572
161 � �� �� �� �= + == + == + == + =� �� �� �� �� �� �� �� �
/���������#�����������"=?����,0-/���������#�����������"=?����,0-
������������������ ����������������������� ���� �(
� ���������������������������� �����������������
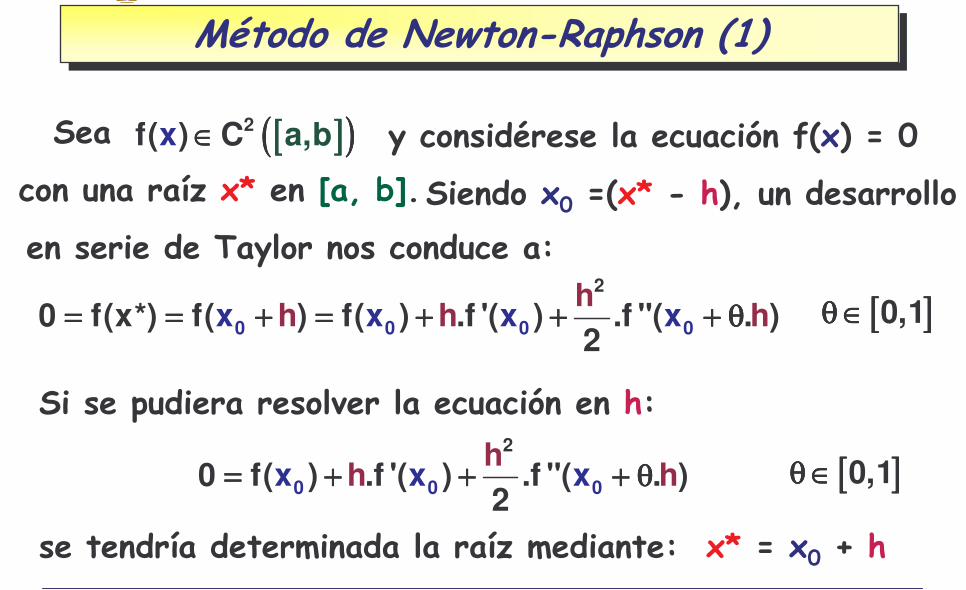
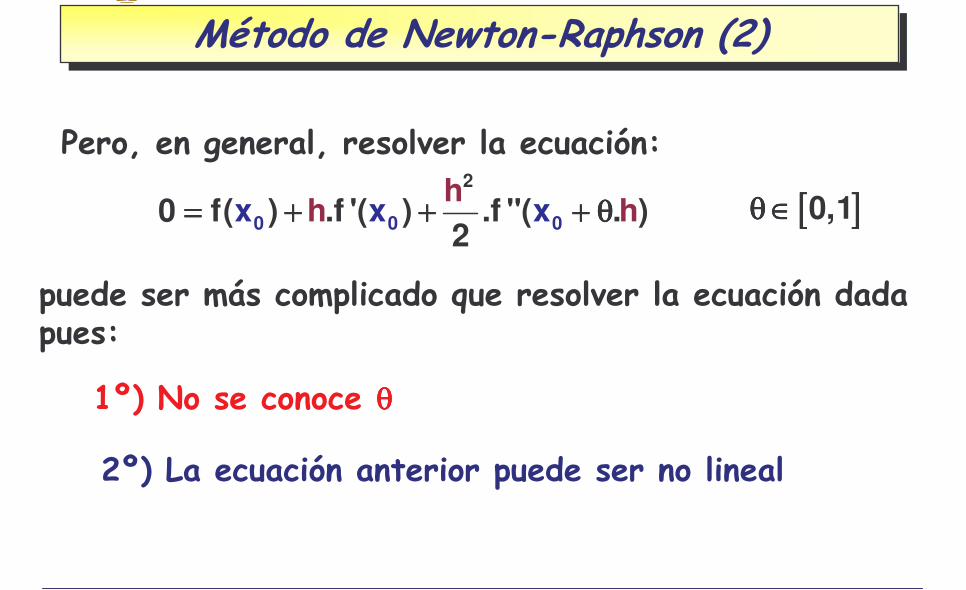
+ �� [[[[ ]]]](((( ))))2f( ) C bx a,∈∈∈∈ ��������������� ������,-./)
�� �����0-1 ��2�'&34 + ����-) /,-1 $ %.' ���������
���������5 ��������� ���"
0 0
2
0 0h
h h0 f(x*) f( ) f( ) .f '( ) .f "x x x x( )2
h.= = + = + + + θ= = + = + + + θ= = + = + + + θ= = + = + + + θ [[[[ ]]]]0,1θ ∈θ ∈θ ∈θ ∈
+ ���� ���������������� �������%"2
0 0 00 f( ) .f '( ) .f "(x x x .h )2h
h= + + + θ= + + + θ= + + + θ= + + + θ
�������������������������0��������"-1 /-) 6%
[[[[ ]]]]0,1θ ∈θ ∈θ ∈θ ∈
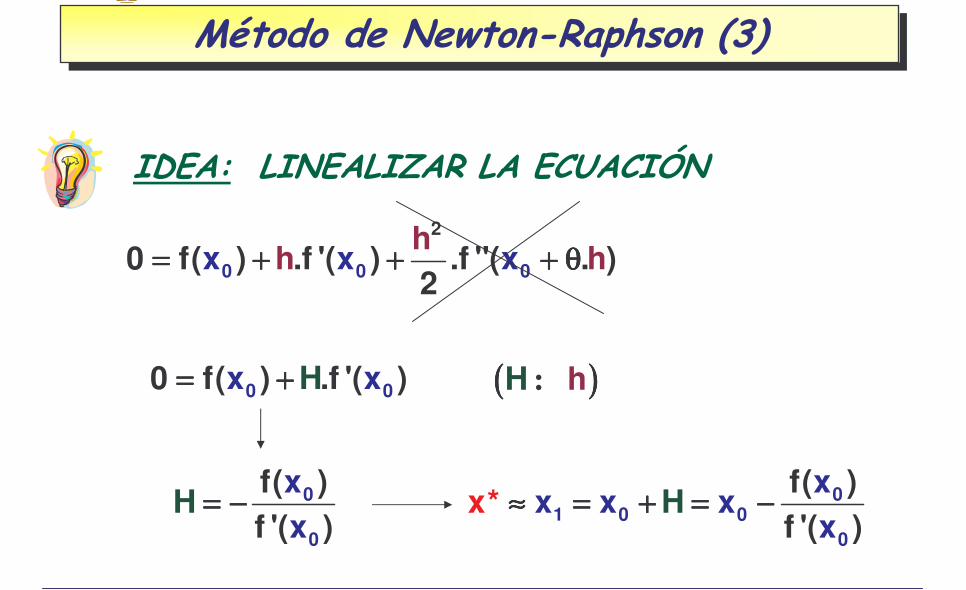
��������# ��$!��%�� ,�.��������# ��$!��%�� ,�.
������������������ ����������������������� ���� �7
� ���������������������������� �����������������
���'���������'����������� �����"2
0 0 00 f( ) .f '( ) .f "(x x x .h )2h
h= + + + θ= + + + θ= + + + θ= + + + θ [[[[ ]]]]0,1θ ∈θ ∈θ ∈θ ∈
� ������� ���������8 ������������ ���������� ��"
�9.�������θθθθ
(9.:��� ������������� �������������
��������# ��$!��%�� ,(.��������# ��$!��%�� ,(.
������������������ ����������������������� ���� �;
� ���������������������������� �����������������
��<�" :��<�:�= �!:�<>� �>�?�
2
0 0 00 f( ) .f '( ) .f "(x x x .h )2h
h= + + + θ= + + + θ= + + + θ= + + + θ
0 0H0 f( ) . )x f '(x= += += += + (((( ))))H h:
0
0
f( )f '
H)
x(x
= −= −= −= − 01 0 0
0
f(xx
)f '
xx
Hx(
* x)
≈ = + = −≈ = + = −≈ = + = −≈ = + = −
��������# ��$!��%�� ,7.��������# ��$!��%�� ,7.
������������������ ����������������������� ���� �@
� ���������������������������� �����������������
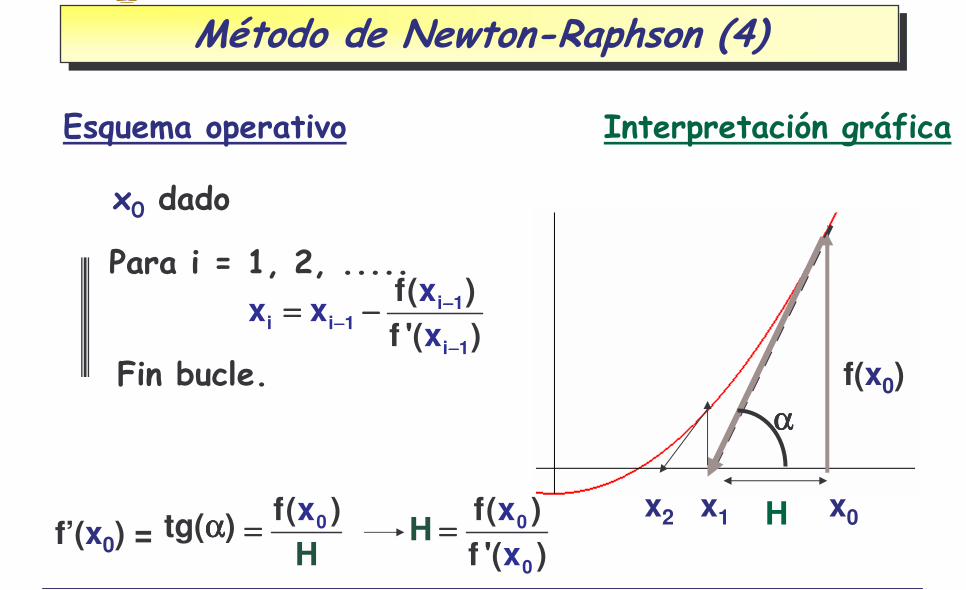
<�8 ����������
-) ���
�����/�'('44444i 1
i i 1i 1
f( )f '( )
xx x
x−−−−
−−−−−−−−
= −= −= −= −
A��& ���4
x0
f(x0)αααα
Htg(αααα) 0
Hf(x )====f’(x0) =
0
0
f( )xH
f '(x )====
x1x2
���������������� ����
��������# ��$!��%�� ,;.��������# ��$!��%�� ,;.
Departamento de Matemática Aplicada y Métodos Informáticos 144
Universidad Politécnica de Madrid Ingeniería de Minas
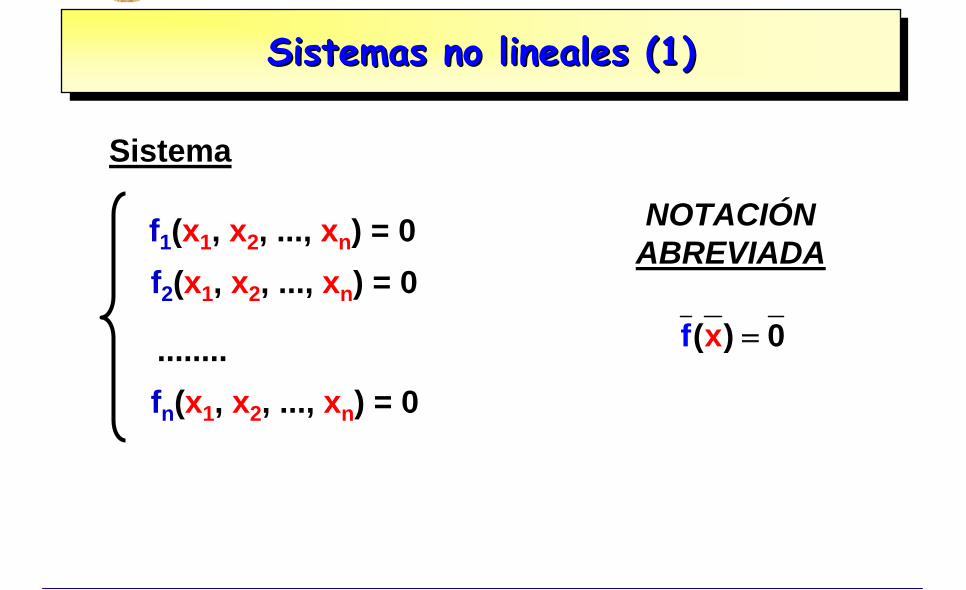
f1(x1, x2, ..., xn) = 0f2(x1, x2, ..., xn) = 0
fn(x1, x2, ..., xn) = 0........ f(x) 0=
Sistema
NOTACIÓNABREVIADA
Sistemas no lineales (1)Sistemas no lineales (1)Sistemas no lineales (1)
Departamento de Matemática Aplicada y Métodos Informáticos 145
Universidad Politécnica de Madrid Ingeniería de Minas
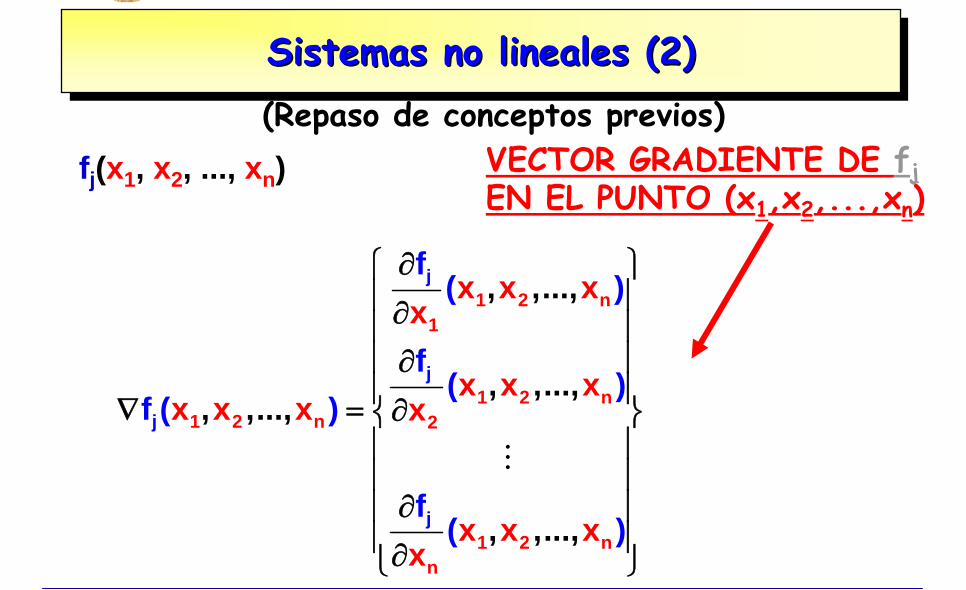
fj(x1, x2, ..., xn)(Repaso de conceptos previos)
1 2 n1
1 2 n1 2 n 2
j
j
n
j
1 2
j
n
, ,...,
, ,...,,
x x xx
x x xx x x x
x
,...,
, ,.x x
f( )
f( )
f ( )
f(
x.., )
∂⎧ ⎫⎪ ⎪∂⎪ ⎪⎪ ⎪∂⎪ ⎪∇ = ∂⎨ ⎬⎪ ⎪⎪ ⎪∂⎪ ⎪
⎪ ⎪∂⎩ ⎭
VECTOR GRADIENTE DE fjEN EL PUNTO (x1,x2,...,xn)
Sistemas no lineales (2)Sistemas no lineales (2)Sistemas no lineales (2)
Departamento de Matemática Aplicada y Métodos Informáticos 155
Universidad Politécnica de Madrid Ingeniería de Minas
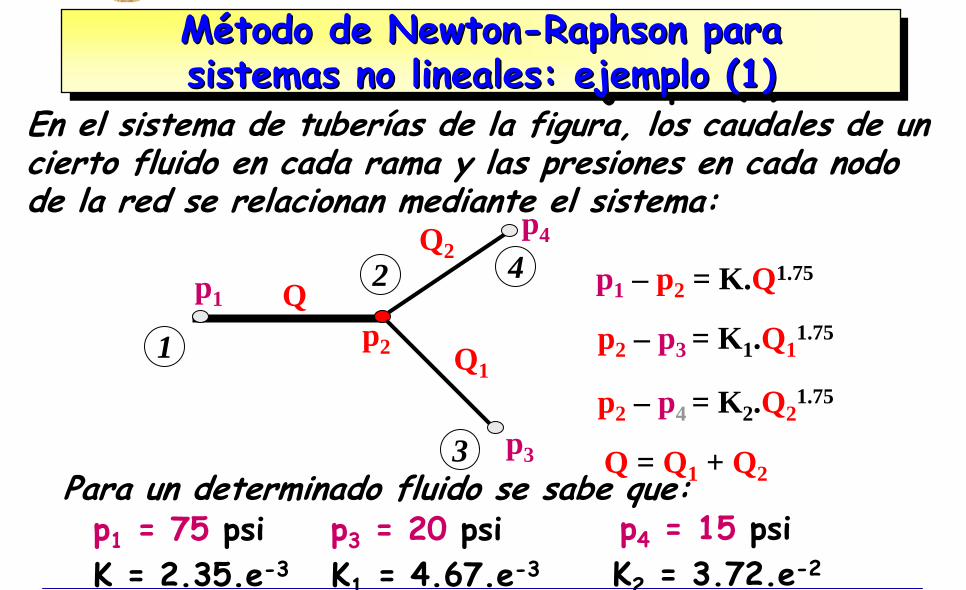
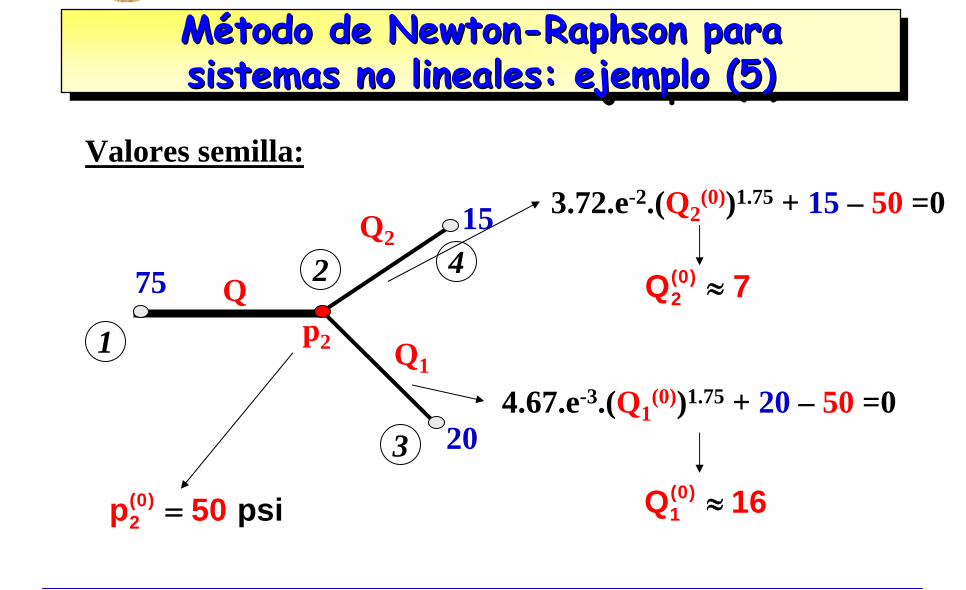
En el sistema de tuberías de la figura, los caudales de un cierto fluido en cada rama y las presiones en cada nodo de la red se relacionan mediante el sistema:
2
1
3
4p4
p2
p1
p3
Q
Q1
Q2p1 – p2 = K.Q1.75
p2 – p3 = K1.Q11.75
p2 – p4 = K2.Q21.75
Q = Q1 + Q2Para un determinado fluido se sabe que:p1 = 75 psi p3 = 20 psi p4 = 15 psiK = 2.35.e-3 K1 = 4.67.e-3 K2 = 3.72.e-2
Método de Newton-Raphson para sistemas no lineales: ejemplo (1)MMéétodo de Newtontodo de Newton--RaphsonRaphson para para sistemas no lineales: ejemplo (1)sistemas no lineales: ejemplo (1)
Departamento de Matemática Aplicada y Métodos Informáticos 156
Universidad Politécnica de Madrid Ingeniería de Minas
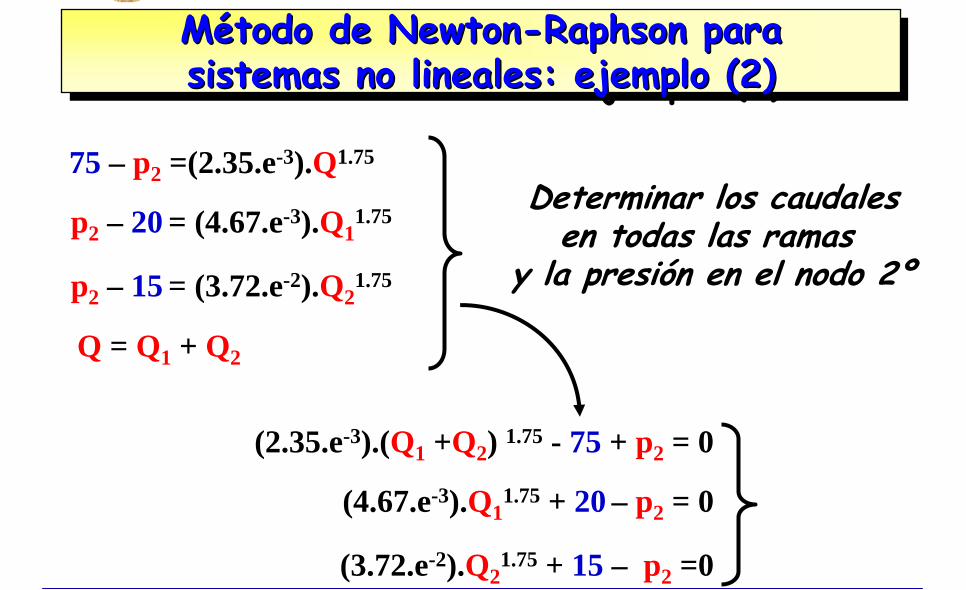
75 – p2 =(2.35.e-3).Q1.75
p2 – 20 = (4.67.e-3).Q11.75
p2 – 15 = (3.72.e-2).Q21.75
Q = Q1 + Q2
Determinar los caudalesen todas las ramas
y la presión en el nodo 2º
(2.35.e-3).(Q1 +Q2) 1.75 - 75 + p2 = 0
(4.67.e-3).Q11.75 + 20 – p2 = 0
(3.72.e-2).Q21.75 + 15 – p2 =0
Método de Newton-Raphson para sistemas no lineales: ejemplo (2)MMéétodo de Newtontodo de Newton--RaphsonRaphson para para sistemas no lineales: ejemplo (2)sistemas no lineales: ejemplo (2)
Departamento de Matemática Aplicada y Métodos Informáticos 157
Universidad Politécnica de Madrid Ingeniería de Minas
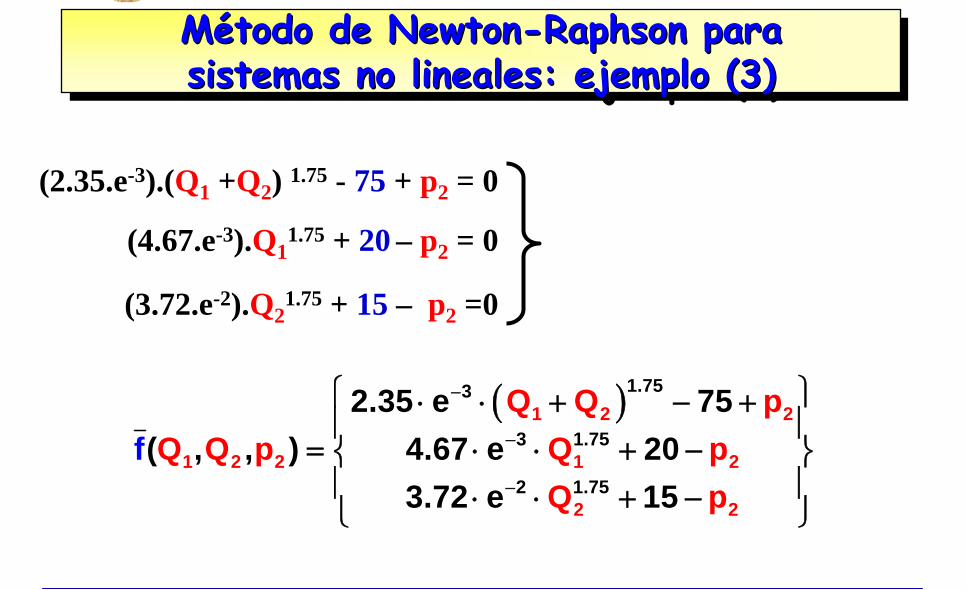
(2.35.e-3).(Q1 +Q2) 1.75 - 75 + p2 = 0
(4.67.e-3).Q11.75 + 20 – p2 = 0
(3.72.e-2).Q21.75 + 15 – p2 =0
( )1 2 2
1 2 2 1 2
2
1.753
3 1.75
2 .2
1 75
2.35 e 75( , , ) 4.
Q67 e 20
3.72
Q pQ Q p Q
ep
Q 15 pf
−
−
−
⎧ ⎫⋅ ⋅ + − +⎪ ⎪
= ⋅ ⋅ + −⎨ ⎬⎪ ⎪⋅ ⋅ + −⎩ ⎭
Método de Newton-Raphson para sistemas no lineales: ejemplo (3)MMéétodo de Newtontodo de Newton--RaphsonRaphson para para sistemas no lineales: ejemplo (3)sistemas no lineales: ejemplo (3)
Departamento de Matemática Aplicada y Métodos Informáticos 158
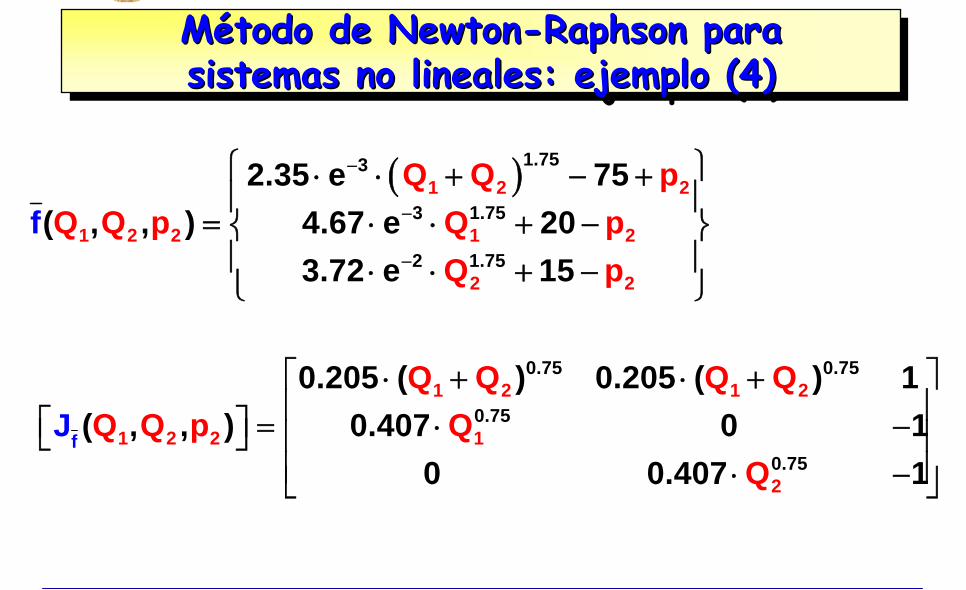
Universidad Politécnica de Madrid Ingeniería de Minas
( )1 2 2
1 2 2 1 2
2
1.753
3 1.75
2 .2
1 75
2.35 e 75( , , ) 4.
Q67 e 20
3.72
Q pQ Q p Q
ep
Q 15 pf
−
−
−
⎧ ⎫⋅ ⋅ + − +⎪ ⎪
= ⋅ ⋅ + −⎨ ⎬⎪ ⎪⋅ ⋅ + −⎩ ⎭
1 2 1 2
1 2 2 1f
0.75 0.75
0.75
0.752
0.205 ( ) 0.205 ( ) 1( , , ) 0.407 0 1
0 0.407
Q Q Q QQJ Q p
Q 1Q
⎡ ⎤⋅ + ⋅ +⎢ ⎥⎡ ⎤ = ⋅ −⎣ ⎦ ⎢ ⎥⎢ ⎥⋅ −⎣ ⎦
Método de Newton-Raphson para sistemas no lineales: ejemplo (4)MMéétodo de Newtontodo de Newton--RaphsonRaphson para para sistemas no lineales: ejemplo (4)sistemas no lineales: ejemplo (4)
Departamento de Matemática Aplicada y Métodos Informáticos 159
Universidad Politécnica de Madrid Ingeniería de Minas
Valores semilla:
2
1
3
415
p2
75
20
Q
Q1
Q2
(0)2p 5 i0 ps=
4.67.e-3.(Q1(0))1.75 + 20 – 50 =0
(0)1Q 16≈
3.72.e-2.(Q2(0))1.75 + 15 – 50 =0
(0)2Q 7≈
Método de Newton-Raphson para sistemas no lineales: ejemplo (5)MMéétodo de Newtontodo de Newton--RaphsonRaphson para para sistemas no lineales: ejemplo (5)sistemas no lineales: ejemplo (5)
Departamento de Matemática Aplicada y Métodos Informáticos 160
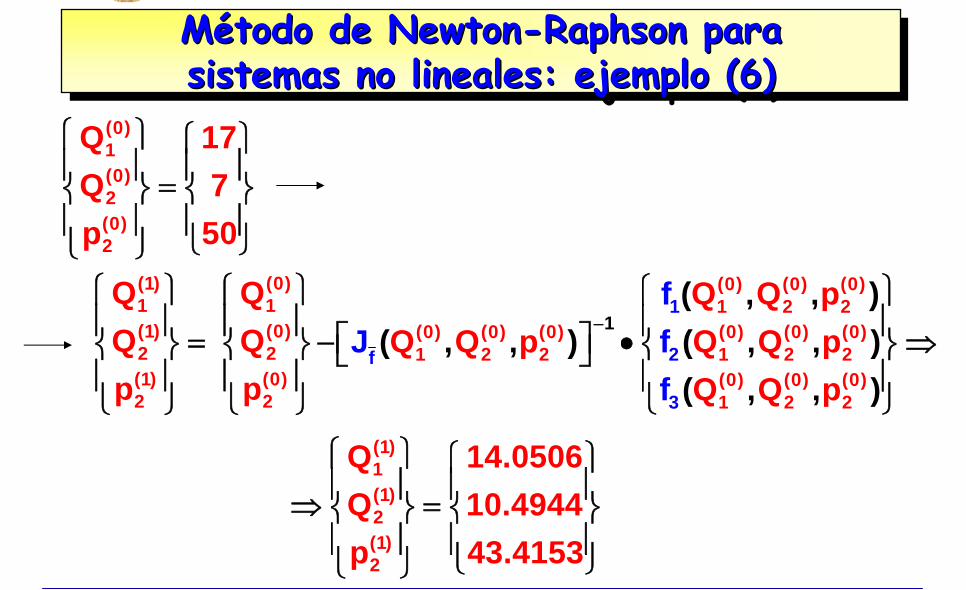
Universidad Politécnica de Madrid Ingeniería de Minas
(0)1(0)2(0)2
Q 17Q 7p 50
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪=⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪
⎩ ⎭⎩ ⎭(1)1(1)2(1)2
QQp
⎧ ⎫⎪ ⎪ =⎨ ⎬⎪ ⎪⎩ ⎭
(0)1(0)2(0)2
QQp
⎧ ⎫⎪ ⎪ −⎨ ⎬⎪ ⎪⎩ ⎭
1
(0) (0) (0)1 2 2
(0) (0) (0) (0) (0) (0)1 2 2 1 2 2
(0) (0) (0)1 2 2
1
2f
3
( , , )( , , ) (
f Q Q pQ Q p Q Q p
Q Q, , )
( , p )J f
f ,
−⎧ ⎫⎪ ⎪⎡ ⎤ • ⇒⎨ ⎬⎣ ⎦⎪ ⎪⎩ ⎭
(1)1(1)2(1)2
Q 14.0506Q 10.4944p 43.4153
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⇒ =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪
⎩ ⎭⎩ ⎭
Método de Newton-Raphson para sistemas no lineales: ejemplo (6)MMéétodo de Newtontodo de Newton--RaphsonRaphson para para sistemas no lineales: ejemplo (6)sistemas no lineales: ejemplo (6)
Departamento de Matemática Aplicada y Métodos Informáticos 161
Universidad Politécnica de Madrid Ingeniería de Minas
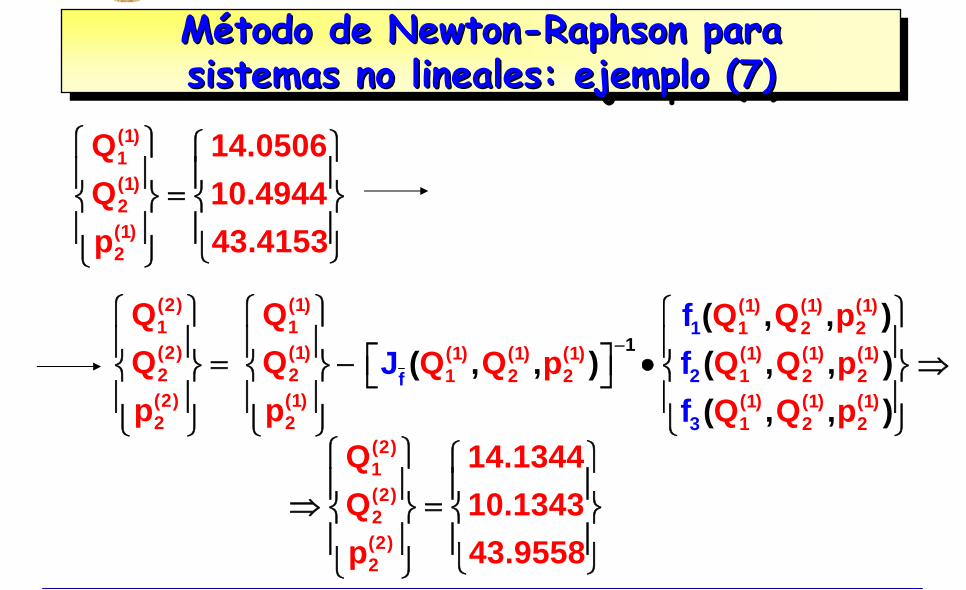
(1)1(1)2(1)2
Q 14.0506Q 10.4944p 43.4153
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪=⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪
⎩ ⎭⎩ ⎭(2)1(2)2(2)2
QQp
⎧ ⎫⎪ ⎪ =⎨ ⎬⎪ ⎪⎩ ⎭
(1)1(1)2(1)2
QQp
⎧ ⎫⎪ ⎪ −⎨ ⎬⎪ ⎪⎩ ⎭
1
(1) (1) (1)1 2 2
(1) (1) (1) (1) (1) (1)1 2 2 1 2 2
(1) (1) (1)1 2 2
1
2f
3
( , , )( , , ) (
f Q Q pQ Q p Q Q p
Q Q, , )
( , p )J f
f ,
−⎧ ⎫⎪ ⎪⎡ ⎤ • ⇒⎨ ⎬⎣ ⎦⎪ ⎪⎩ ⎭
(2)1(2)2(2)2
Q 14.1344Q 10.1343p 43.9558
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⇒ =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪
⎩ ⎭⎩ ⎭
Método de Newton-Raphson para sistemas no lineales: ejemplo (7)MMéétodo de Newtontodo de Newton--RaphsonRaphson para para sistemas no lineales: ejemplo (7)sistemas no lineales: ejemplo (7)
Departamento de Matemática Aplicada y Métodos Informáticos 162
Universidad Politécnica de Madrid Ingeniería de Minas
(3)1(3)2(3)2
QQp
⎧ ⎫⎪ ⎪ =⎨ ⎬⎪ ⎪⎩ ⎭
(2)1(2)2(2)2
QQp
⎧ ⎫⎪ ⎪ −⎨ ⎬⎪ ⎪⎩ ⎭
1
(2) (2) (2)1 2 2
(2) (2) (2) (2) (2) (2)1 2 2 1 2 2
(2) (2) (2)1 2 2
1
2f
3
( , , )( , , ) (
f Q Q pQ Q p Q Q p
Q Q, , )
( , p )J f
f ,
−⎧ ⎫⎪ ⎪⎡ ⎤ • ⇒⎨ ⎬⎣ ⎦⎪ ⎪⎩ ⎭
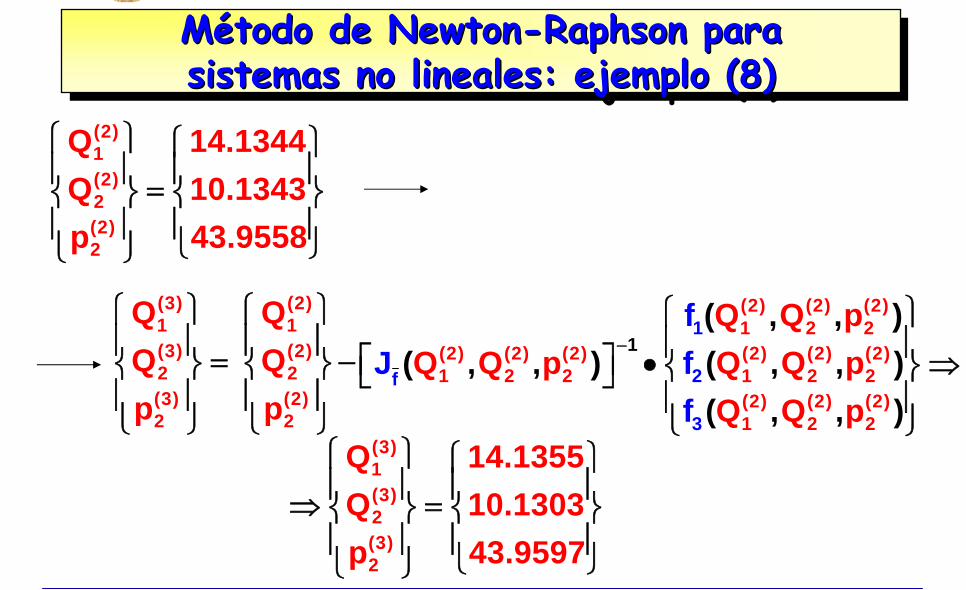
(3)1(3)2(3)2
Q 14.1355Q 10.1303p 43.9597
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⇒ =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪
⎩ ⎭⎩ ⎭
(2)1(2)2(2)2
Q 14.1344Q 10.1343p 43.9558
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪=⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪
⎩ ⎭⎩ ⎭
Método de Newton-Raphson para sistemas no lineales: ejemplo (8)MMéétodo de Newtontodo de Newton--RaphsonRaphson para para sistemas no lineales: ejemplo (8)sistemas no lineales: ejemplo (8)
Departamento de Matemática Aplicada y Métodos Informáticos 163
Universidad Politécnica de Madrid Ingeniería de Minas
(4)1(4)2(4)2
QQp
⎧ ⎫⎪ ⎪ =⎨ ⎬⎪ ⎪⎩ ⎭
(3)1(3)2(3)2
QQp
⎧ ⎫⎪ ⎪ −⎨ ⎬⎪ ⎪⎩ ⎭
1
(3) (3) (3)1 2 2
(3) (3) (3) (3) (3) (3)1 2 2 1 2 2
(3) (3) (3)1 2 2
1
2f
3
( , , )( , , ) (
f Q Q pQ Q p Q Q p
Q Q, , )
( , p )J f
f ,
−⎧ ⎫⎪ ⎪⎡ ⎤ • ⇒⎨ ⎬⎣ ⎦⎪ ⎪⎩ ⎭
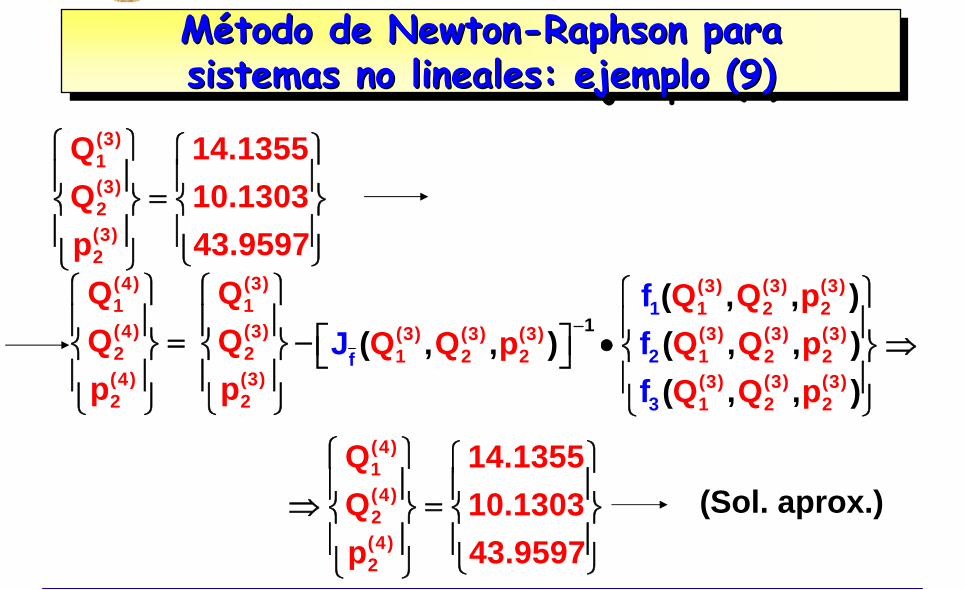
(4)1(4)2(4)2
Q 14.1355Q 10.1303p 43.9597
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⇒ =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪
⎩ ⎭⎩ ⎭
(3)1(3)2(3)2
Q 14.1355Q 10.1303p 43.9597
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪=⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪
⎩ ⎭⎩ ⎭
(Sol. aprox.)
Método de Newton-Raphson para sistemas no lineales: ejemplo (9)MMéétodo de Newtontodo de Newton--RaphsonRaphson para para sistemas no lineales: ejemplo (9)sistemas no lineales: ejemplo (9)