pengujian dan analisis unjuk kerja prototipe pompa hydram
TRANSCRIPT

Prosiding Konferensi Nasional Engineering Perhotelan XI, Universitas Udayana - 2021
ISSN 2338-414X
*Korespondensi: 081999915718 E-mail: [email protected]
ÓTeknik Mesin Universitas Udayana 2021
Pengujian dan Analisis Unjuk Kerja Prototipe Pompa Hydram yang telah Beroperasi di Dusun Bon Desa Belok/Sidan
I Putu Widiarta1), Made Suarda2)*, I Gusti Ketut Sukadana3), I Gusti Komang Dwijana4) 1)Program Studi Magister Teknik Mesin Fakultas Teknik, Universitas Udayana, Kampus Sudirman Denpasar Bali
2,3,4)Program Studi Teknik Mesin Fakultas Teknik, Universitas Udayana, Kampus Bukit Jimbaran Bali
Abstrak Unjuk kerja pompa hydram dihasilkan akibat terjadinya phenomena water hammer. Tekanan water hammer merupakan peningkatan tekanan yang terjadi akibat penghentian aliran secara tiba-tiba. Phenomena water hammer tersebut terjadi di dalam badan pompa hydram akibat menutupnya katup limbah secara tiba-tiba. Peningkatan tekanan tersebut sangat dipengaruhi oleh kecepatan dari fluida air. Selanjutnya, kecepatan aliran tersebut dipengaruhi panjang langkah katup limbah pompa hydram. Jadi, katup limbah memiliki peranan penting dalam mekanisme terjadinya tekanan water hammer dan unjuk kerja pompa hydram. Penelitian ini dilakukan untuk menganalisis pengaruh penambahan panjang langkah katup limbah terhadap tekanan water hammer dan unjuk kerja pompa hydram pada head pemompaan yaitu 37 m dengan tiga variasi panjang langkah katup limbah yaitu 1,5, 2,5, dan 3,5 cm. Pengujian unjuk kerja dilakukan pada prototipe pompa hydram yang telah terpasang di dusun Bon desa Belok-Sidan kecamatan Petang kabupaten Badung provinsi Bali. Hasil pengujian menunjukkan bahwa semakin panjang langkah katup limbah dapat meningkatkan kecepatan aliran air, tekanan water hammer serta unjuk kerja pompa hydram. Namun, berdasarkan persamaan trendline grafik dapat diprediksi unjuk kerja maksimum pompa hydram adalah pada langkah katup limbah 4,5 cm.
Kata kunci: pompa hydram, tekanan water hammer, unjuk kerja, katup limbah dan panjang langkah.
Abstract Performance of the hydraulic ram pump is generated as a result of the water hammer phenomenon. Water hammer pressure is an increase in pressure that occurs due to a sudden cessation of flow. The water hammer phenomenon take place in the hydraulic ram pump body due to the sudden closing of the waste valve. The increasing pressure is strongly influenced by the velocity of the water fluid. Furthermore, the flow velocity is affected by the stroke length of the waste valve. So, the waste valve has an important role in the mechanism of the occurrence of water hammer pressure and the performance of the hydraulic ram pump. This study was conducted to analyze the effect of increasing the stroke length of the waste valve on the water hammer pressure and the performance of the hydraulic ram pump at the pumping head, which is 37 m with three variations in the length of the waste valve stroke, namely 1.5, 2.5. , and 3.5 cm. Performance testing was carried out on a hydraulic ram pump prototype that had been installed in Bon sub-village, Belok-Sidan village, Petang sub-district, Badung district, Bali province. The investigation results show that the longer the stroke of the waste valve can increase the speed of the water flow, the pressure of the water hammer and the performance of the hydraulic ram pump. However, based on the graph trendline equation, it can be predicted that the maximum performance of the hydraulic ram pump is at a waste valve stroke of 4.5 cm.
Keywords: hydraulic ram pump, water hammer pressure, performance, waste valve and stroke length.
1. Pendahuluan
Tekanan palu air atau water hammer pressure adalah peningkatan tekanan fluida air yang terjadi akibat fluida air yang memiliki kecepatan kemudian dihentikan secara tiba-tiba [1]. Penginkatan tekanan water hammer ini sangat dipengaruhi oleh kecepatan dari fluida air [2]. Tekanan water hammer diaplikasikan pada pompa hydram.
Katup limbah pompa hydram memiliki peranan penting dalam mekanisme terjadinya tekanan water hammer [3]. Saat katup limbah terbuka dan katup tekan tertutup terjadi proses recoil, sehingga air mengalir dari pipa penggerak ke badan pompa kemudian keluar melalui saluran katup limbah, akibat dari air yang mengalir keluar melalui katup limbah maka katup akan menutup. Dengan tertutupnya katup limbah maka akan terjadi penghentian secara tiba-tiba kecepatan aliran dari pipa penggerak sehingga terjadi phenomena water hammer [4].
Peningkatan tekanan air ini dimanfaatkan untuk membuka katup tekan, sehingga katup tekan terbuka dan air dapat bergerak ke tabung udara yang kemudian dikompresi, selanjutnya fluida akan mengalir keluar
melalui saluran outlet pada tabung udara atau air chamber kemudian dialirkan menuju pipa trasmisi [5].
Kapasitas pemompaan dan kapasitas limbah mempengaruhi efisiensi volumetris pompa hydram serta efisiensi total pompa hydram, karena efisiensi volumetris merupakan fungsi dari kapasitas pemompaan dan kapasitas limbah yang dihasilkan dan efesiensi total pompa hydram merupakan fungsi dari kapasitas dan head pemompaan [6].
Dari studi literatur yang sudah dilakukan, penelitian variasi panjang katup limbah pompa terhadap kapasitas pemompaan dan efisiensi total pompa hydram sudah banyak dilakukan dengan skala laboratorium, tetapi penelitian yang dilakukan ini adalah menguji dan menganalisis prototipe pompa hydram yang sudah terpasang (studi kasus) dengan memvariasikan panjang langkah (stroke) katup limbah terhadap tekanan water hammer, efisiensi volumetris, efisiensi total dan prediksi unjuk kerja optimal dari pompa hydram dan dapat dicari nilai RMS dari fungsi trendline grafik. Penelitian dilakukan di Dusun Bon Desa Belok/Sidan, Kecamatan Petang, Kabupaten Badung.
I Putu Widiarta et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 2
2. Metode Penelitian
2.1. Rancangan Penelitian
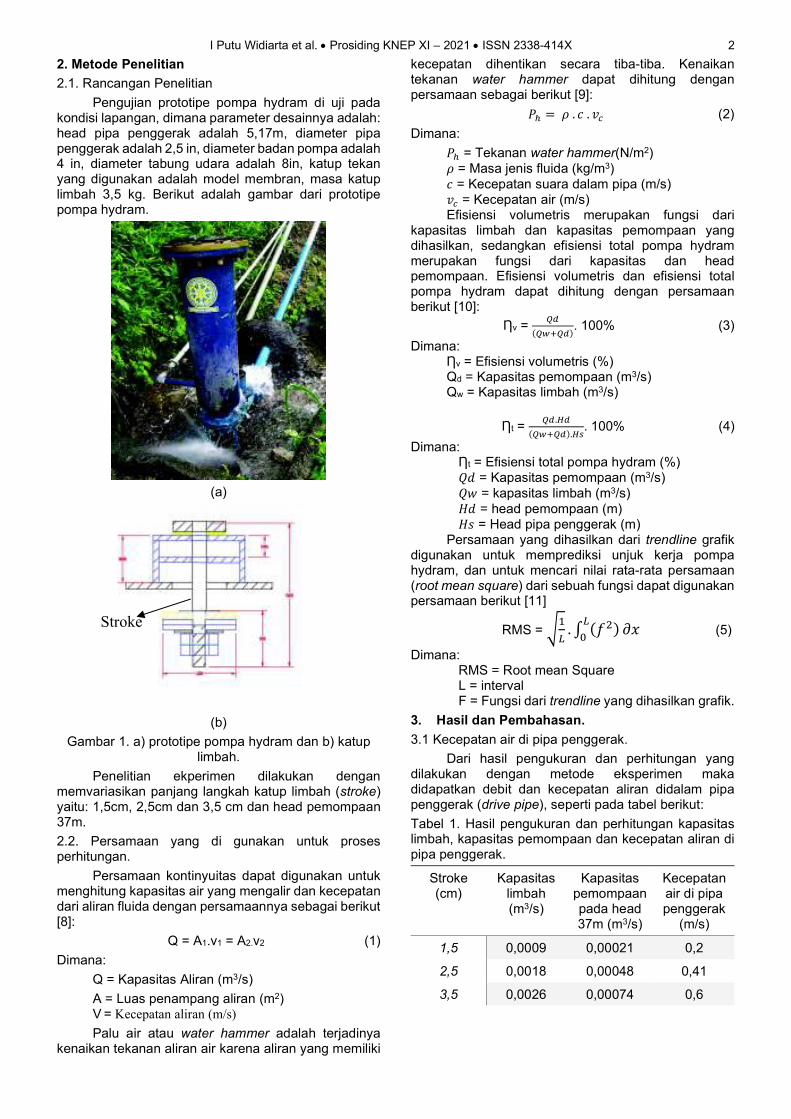
Pengujian prototipe pompa hydram di uji pada kondisi lapangan, dimana parameter desainnya adalah: head pipa penggerak adalah 5,17m, diameter pipa penggerak adalah 2,5 in, diameter badan pompa adalah 4 in, diameter tabung udara adalah 8in, katup tekan yang digunakan adalah model membran, masa katup limbah 3,5 kg. Berikut adalah gambar dari prototipe pompa hydram.
(a)
(b)
Gambar 1. a) prototipe pompa hydram dan b) katup limbah.
Penelitian ekperimen dilakukan dengan memvariasikan panjang langkah katup limbah (stroke) yaitu: 1,5cm, 2,5cm dan 3,5 cm dan head pemompaan 37m.
2.2. Persamaan yang di gunakan untuk proses perhitungan.
Persamaan kontinyuitas dapat digunakan untuk menghitung kapasitas air yang mengalir dan kecepatan dari aliran fluida dengan persamaannya sebagai berikut [8]:
Q = A1.v1 = A2.v2 (1)
Dimana:
Q = Kapasitas Aliran (m3/s)
A = Luas penampang aliran (m2) V = Kecepatan aliran (m/s)
Palu air atau water hammer adalah terjadinya kenaikan tekanan aliran air karena aliran yang memiliki
kecepatan dihentikan secara tiba-tiba. Kenaikan tekanan water hammer dapat dihitung dengan persamaan sebagai berikut [9]:
(2)
Dimana:
= Tekanan water hammer(N/m2)
= Masa jenis fluida (kg/m3)
= Kecepatan suara dalam pipa (m/s) = Kecepatan air (m/s)
Efisiensi volumetris merupakan fungsi dari kapasitas limbah dan kapasitas pemompaan yang dihasilkan, sedangkan efisiensi total pompa hydram merupakan fungsi dari kapasitas dan head pemompaan. Efisiensi volumetris dan efisiensi total pompa hydram dapat dihitung dengan persamaan berikut [10]:
Ƞv = . 100% (3)
Dimana: Ƞv = Efisiensi volumetris (%) Qd = Kapasitas pemompaan (m3/s) Qw = Kapasitas limbah (m3/s)
Ƞt = . 100% (4)
Dimana: Ƞt = Efisiensi total pompa hydram (%) = Kapasitas pemompaan (m3/s)
= kapasitas limbah (m3/s)
= head pemompaan (m) = Head pipa penggerak (m)
Persamaan yang dihasilkan dari trendline grafik digunakan untuk memprediksi unjuk kerja pompa hydram, dan untuk mencari nilai rata-rata persamaan (root mean square) dari sebuah fungsi dapat digunakan persamaan berikut [11]
RMS = (5)
Dimana: RMS = Root mean Square L = interval F = Fungsi dari trendline yang dihasilkan grafik.
3. Hasil dan Pembahasan.
3.1 Kecepatan air di pipa penggerak.
Dari hasil pengukuran dan perhitungan yang dilakukan dengan metode eksperimen maka didapatkan debit dan kecepatan aliran didalam pipa penggerak (drive pipe), seperti pada tabel berikut:
Tabel 1. Hasil pengukuran dan perhitungan kapasitas limbah, kapasitas pemompaan dan kecepatan aliran di pipa penggerak.
Stroke (cm)
Kapasitas limbah (m3/s)
Kapasitas pemompaan pada head 37m (m3/s)
Kecepatan air di pipa penggerak
(m/s)
1,5 0,0009 0,00021 0,2
2,5 0,0018 0,00048 0,41
3,5 0,0026 0,00074 0,6
Stroke
I Putu Widiarta et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 3
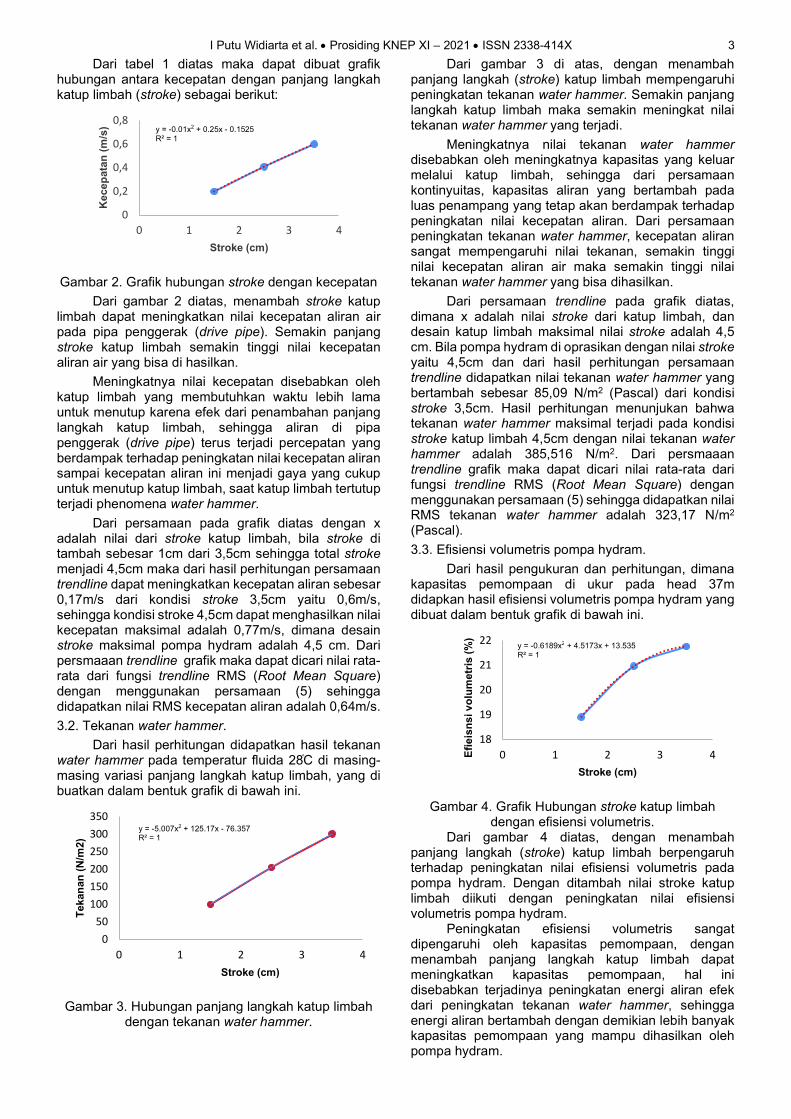
Dari tabel 1 diatas maka dapat dibuat grafik hubungan antara kecepatan dengan panjang langkah katup limbah (stroke) sebagai berikut:
Gambar 2. Grafik hubungan stroke dengan kecepatan
Dari gambar 2 diatas, menambah stroke katup limbah dapat meningkatkan nilai kecepatan aliran air pada pipa penggerak (drive pipe). Semakin panjang stroke katup limbah semakin tinggi nilai kecepatan aliran air yang bisa di hasilkan.
Meningkatnya nilai kecepatan disebabkan oleh katup limbah yang membutuhkan waktu lebih lama untuk menutup karena efek dari penambahan panjang langkah katup limbah, sehingga aliran di pipa penggerak (drive pipe) terus terjadi percepatan yang berdampak terhadap peningkatan nilai kecepatan aliran sampai kecepatan aliran ini menjadi gaya yang cukup untuk menutup katup limbah, saat katup limbah tertutup terjadi phenomena water hammer.
Dari persamaan pada grafik diatas dengan x adalah nilai dari stroke katup limbah, bila stroke di tambah sebesar 1cm dari 3,5cm sehingga total stroke menjadi 4,5cm maka dari hasil perhitungan persamaan trendline dapat meningkatkan kecepatan aliran sebesar 0,17m/s dari kondisi stroke 3,5cm yaitu 0,6m/s, sehingga kondisi stroke 4,5cm dapat menghasilkan nilai kecepatan maksimal adalah 0,77m/s, dimana desain stroke maksimal pompa hydram adalah 4,5 cm. Dari persmaaan trendline grafik maka dapat dicari nilai rata-rata dari fungsi trendline RMS (Root Mean Square) dengan menggunakan persamaan (5) sehingga didapatkan nilai RMS kecepatan aliran adalah 0,64m/s.
3.2. Tekanan water hammer.
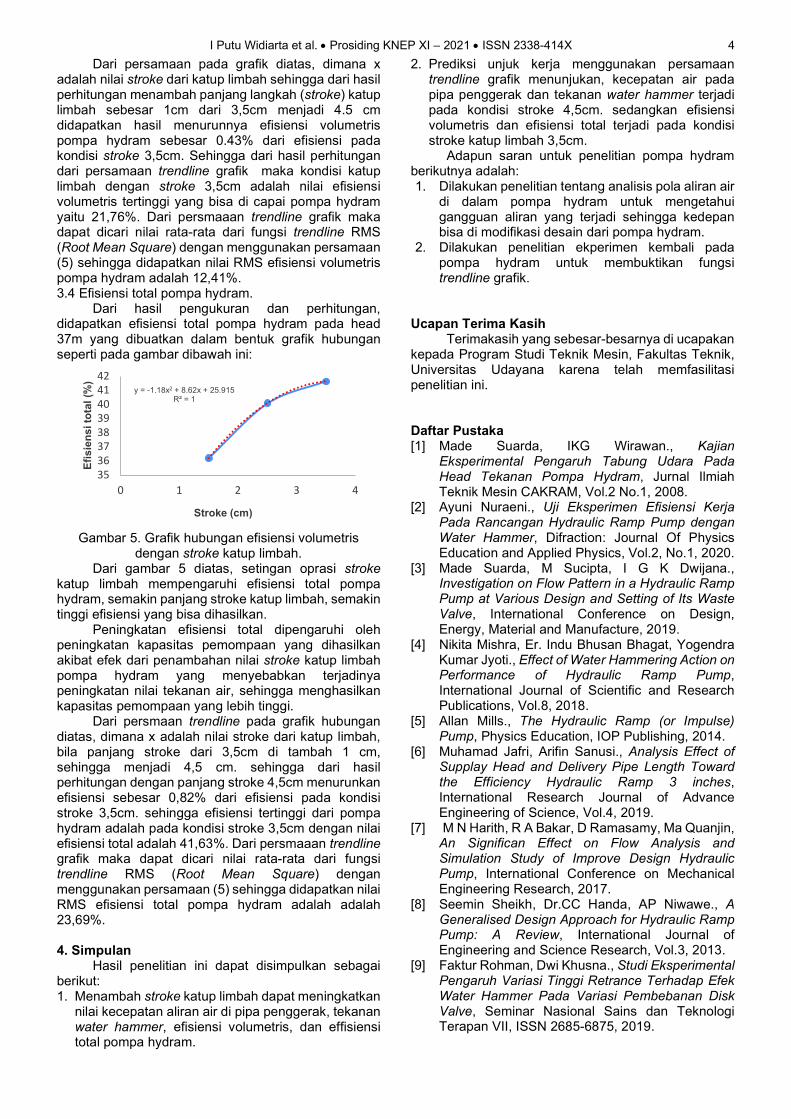
Dari hasil perhitungan didapatkan hasil tekanan water hammer pada temperatur fluida 28֯C di masing-masing variasi panjang langkah katup limbah, yang di buatkan dalam bentuk grafik di bawah ini.
Gambar 3. Hubungan panjang langkah katup limbah dengan tekanan water hammer.
Dari gambar 3 di atas, dengan menambah panjang langkah (stroke) katup limbah mempengaruhi peningkatan tekanan water hammer. Semakin panjang langkah katup limbah maka semakin meningkat nilai tekanan water hammer yang terjadi.
Meningkatnya nilai tekanan water hammer disebabkan oleh meningkatnya kapasitas yang keluar melalui katup limbah, sehingga dari persamaan kontinyuitas, kapasitas aliran yang bertambah pada luas penampang yang tetap akan berdampak terhadap peningkatan nilai kecepatan aliran. Dari persamaan peningkatan tekanan water hammer, kecepatan aliran sangat mempengaruhi nilai tekanan, semakin tinggi nilai kecepatan aliran air maka semakin tinggi nilai tekanan water hammer yang bisa dihasilkan.
Dari persamaan trendline pada grafik diatas, dimana x adalah nilai stroke dari katup limbah, dan desain katup limbah maksimal nilai stroke adalah 4,5 cm. Bila pompa hydram di oprasikan dengan nilai stroke yaitu 4,5cm dan dari hasil perhitungan persamaan trendline didapatkan nilai tekanan water hammer yang bertambah sebesar 85,09 N/m2 (Pascal) dari kondisi stroke 3,5cm. Hasil perhitungan menunjukan bahwa tekanan water hammer maksimal terjadi pada kondisi stroke katup limbah 4,5cm dengan nilai tekanan water hammer adalah 385,516 N/m2. Dari persmaaan trendline grafik maka dapat dicari nilai rata-rata dari fungsi trendline RMS (Root Mean Square) dengan menggunakan persamaan (5) sehingga didapatkan nilai RMS tekanan water hammer adalah 323,17 N/m2 (Pascal).
3.3. Efisiensi volumetris pompa hydram.
Dari hasil pengukuran dan perhitungan, dimana kapasitas pemompaan di ukur pada head 37m didapkan hasil efisiensi volumetris pompa hydram yang dibuat dalam bentuk grafik di bawah ini.
Gambar 4. Grafik Hubungan stroke katup limbah dengan efisiensi volumetris.
Dari gambar 4 diatas, dengan menambah panjang langkah (stroke) katup limbah berpengaruh terhadap peningkatan nilai efisiensi volumetris pada pompa hydram. Dengan ditambah nilai stroke katup limbah diikuti dengan peningkatan nilai efisiensi volumetris pompa hydram.
Peningkatan efisiensi volumetris sangat dipengaruhi oleh kapasitas pemompaan, dengan menambah panjang langkah katup limbah dapat meningkatkan kapasitas pemompaan, hal ini disebabkan terjadinya peningkatan energi aliran efek dari peningkatan tekanan water hammer, sehingga energi aliran bertambah dengan demikian lebih banyak kapasitas pemompaan yang mampu dihasilkan oleh pompa hydram.
0
0,2
0,4
0,6
0,8
0 1 2 3 4
Kecep
ata
n (
m/s
)
Stroke (cm)
0
50
100
150
200
250
300
350
0 1 2 3 4
Tekan
an
(N
/m2)
Stroke (cm)
18
19
20
21
22
0 1 2 3 4Efi
eis
ns
i v
olu
metr
is (
%)
Stroke (cm)
y = -0.01x2 + 0.25x - 0.1525 R² = 1
y = -5.007x2 + 125.17x - 76.357 R² = 1
y = -0.6189x2 + 4.5173x + 13.535 R² = 1
I Putu Widiarta et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 4
Dari persamaan pada grafik diatas, dimana x adalah nilai stroke dari katup limbah sehingga dari hasil perhitungan menambah panjang langkah (stroke) katup limbah sebesar 1cm dari 3,5cm menjadi 4.5 cm didapatkan hasil menurunnya efisiensi volumetris pompa hydram sebesar 0.43% dari efisiensi pada kondisi stroke 3,5cm. Sehingga dari hasil perhitungan dari persamaan trendline grafik maka kondisi katup limbah dengan stroke 3,5cm adalah nilai efisiensi volumetris tertinggi yang bisa di capai pompa hydram yaitu 21,76%. Dari persmaaan trendline grafik maka dapat dicari nilai rata-rata dari fungsi trendline RMS (Root Mean Square) dengan menggunakan persamaan (5) sehingga didapatkan nilai RMS efisiensi volumetris pompa hydram adalah 12,41%. 3.4 Efisiensi total pompa hydram.
Dari hasil pengukuran dan perhitungan, didapatkan efisiensi total pompa hydram pada head 37m yang dibuatkan dalam bentuk grafik hubungan seperti pada gambar dibawah ini:
Gambar 5. Grafik hubungan efisiensi volumetris
dengan stroke katup limbah. Dari gambar 5 diatas, setingan oprasi stroke
katup limbah mempengaruhi efisiensi total pompa hydram, semakin panjang stroke katup limbah, semakin tinggi efisiensi yang bisa dihasilkan.
Peningkatan efisiensi total dipengaruhi oleh peningkatan kapasitas pemompaan yang dihasilkan akibat efek dari penambahan nilai stroke katup limbah pompa hydram yang menyebabkan terjadinya peningkatan nilai tekanan air, sehingga menghasilkan kapasitas pemompaan yang lebih tinggi.
Dari persmaan trendline pada grafik hubungan diatas, dimana x adalah nilai stroke dari katup limbah, bila panjang stroke dari 3,5cm di tambah 1 cm, sehingga menjadi 4,5 cm. sehingga dari hasil perhitungan dengan panjang stroke 4,5cm menurunkan efisiensi sebesar 0,82% dari efisiensi pada kondisi stroke 3,5cm. sehingga efisiensi tertinggi dari pompa hydram adalah pada kondisi stroke 3,5cm dengan nilai efisiensi total adalah 41,63%. Dari persmaaan trendline grafik maka dapat dicari nilai rata-rata dari fungsi trendline RMS (Root Mean Square) dengan menggunakan persamaan (5) sehingga didapatkan nilai RMS efisiensi total pompa hydram adalah adalah 23,69%.
4. Simpulan
Hasil penelitian ini dapat disimpulkan sebagai berikut: 1. Menambah stroke katup limbah dapat meningkatkan
nilai kecepatan aliran air di pipa penggerak, tekanan water hammer, efisiensi volumetris, dan effisiensi total pompa hydram.
2. Prediksi unjuk kerja menggunakan persamaan trendline grafik menunjukan, kecepatan air pada pipa penggerak dan tekanan water hammer terjadi pada kondisi stroke 4,5cm. sedangkan efisiensi volumetris dan efisiensi total terjadi pada kondisi stroke katup limbah 3,5cm.
Adapun saran untuk penelitian pompa hydram berikutnya adalah: 1. Dilakukan penelitian tentang analisis pola aliran air
di dalam pompa hydram untuk mengetahui gangguan aliran yang terjadi sehingga kedepan bisa di modifikasi desain dari pompa hydram.
2. Dilakukan penelitian ekperimen kembali pada pompa hydram untuk membuktikan fungsi trendline grafik.
Ucapan Terima Kasih Terimakasih yang sebesar-besarnya di ucapakan
kepada Program Studi Teknik Mesin, Fakultas Teknik, Universitas Udayana karena telah memfasilitasi penelitian ini.
Daftar Pustaka [1] Made Suarda, IKG Wirawan., Kajian
Eksperimental Pengaruh Tabung Udara Pada Head Tekanan Pompa Hydram, Jurnal Ilmiah Teknik Mesin CAKRAM, Vol.2 No.1, 2008.
[2] Ayuni Nuraeni., Uji Eksperimen Efisiensi Kerja Pada Rancangan Hydraulic Ramp Pump dengan Water Hammer, Difraction: Journal Of Physics Education and Applied Physics, Vol.2, No.1, 2020.
[3] Made Suarda, M Sucipta, I G K Dwijana., Investigation on Flow Pattern in a Hydraulic Ramp Pump at Various Design and Setting of Its Waste Valve, International Conference on Design, Energy, Material and Manufacture, 2019.
[4] Nikita Mishra, Er. Indu Bhusan Bhagat, Yogendra Kumar Jyoti., Effect of Water Hammering Action on Performance of Hydraulic Ramp Pump, International Journal of Scientific and Research Publications, Vol.8, 2018.
[5] Allan Mills., The Hydraulic Ramp (or Impulse) Pump, Physics Education, IOP Publishing, 2014.
[6] Muhamad Jafri, Arifin Sanusi., Analysis Effect of Supplay Head and Delivery Pipe Length Toward the Efficiency Hydraulic Ramp 3 inches, International Research Journal of Advance Engineering of Science, Vol.4, 2019.
[7] M N Harith, R A Bakar, D Ramasamy, Ma Quanjin, An Significan Effect on Flow Analysis and Simulation Study of Improve Design Hydraulic Pump, International Conference on Mechanical Engineering Research, 2017.
[8] Seemin Sheikh, Dr.CC Handa, AP Niwawe., A Generalised Design Approach for Hydraulic Ramp Pump: A Review, International Journal of Engineering and Science Research, Vol.3, 2013.
[9] Faktur Rohman, Dwi Khusna., Studi Eksperimental Pengaruh Variasi Tinggi Retrance Terhadap Efek Water Hammer Pada Variasi Pembebanan Disk Valve, Seminar Nasional Sains dan Teknologi Terapan VII, ISSN 2685-6875, 2019.
y = -1.18x2 + 8.62x + 25.915R² = 1
35
36
37
38
39
40
41
42
0 1 2 3 4
Efi
sie
ns
i to
tal
(%)
Stroke (cm)

I Putu Widiarta et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 5
[10] Made Suarda, Nengah Swarnadwipa., Perancangan dan Pengujian Katup Membran pada Katup Tekan Pompa Hydram, Jurnal Mechanical, Vol.4, No.1, 2013.
[11] D.R Green, M.C Harisson, J.P. Ward, Mathematics For Engineer, Loughborough University, 2014.
I Putu Widiarta menyelesaikan Pendidikan S1 di Program Studi Teknik Mesin Universitas Udayana tahun 2020 dan sekarang sedang menempuh Pendidikan S2 di Program Studi Magister Teknik Mesin Universitas Udayana. Penelitian yang diminati adalah tentang mekanika fluida, perpindahan panas dan penelitian berbasis CFD.

Prosiding Konferensi Nasional Engineering Perhotelan XI, Universitas Udayana - 2021
ISSN 2338-414X
*Korespondensi: Tel./Fax.: 085770390124 E-mail: [email protected]
ÓTeknik Mesin Universitas Udayana 2021
Pengaruh Variasi Temperatur Udara Inlet Pada Sistem Indirect Evaporative Cooling Berbasis Solid Dry Pad
Aditias Satria Nugroho1), Hendra Wijaksana2), I Nengah Suarnadwipa3) 1,2)Jurusan Teknik Mesin Universitas Udayana, Kampus Bukit Jimbaran Bali
3)Departemen Teknik Mesin, Universitas Indonesia, Kampus Depok
Abstrak
Pada musim kemarau suhu udara di wilayah Bali bisa menacapai 30-35˚C dengan tingkat kelembaban udara yang cukup tinggi. Sedangkan pada musim penghujan suhu udara mengalami penurunan berkisar 26-30˚C. tetapi kelembaban udara kemungkinan akan tetap meningkat. Hal ini yang mendorong penulis untuk menganalisa pengaruh variasi temperatur udara inlet terhadap penurunan temperatur bola kering dan penurunan kandungan uap air di udara pada sistem Indirect Evaporative Cooling.Penelitian ini menggunakan variasi temperatur udara inlet yaitu 28,6˚C, 35,03˚C, dan 39,33˚C dengan kecepatan aliran udara untuk setiap temperaturnya 11.3 m/s serta pengisian volume SDP 100% berukuran 640cm³ berjumlah 20 batang. Pencatatan temperatur setiap 15 menit dengan rentang waktu 60 menit pada sisi masuk fan, sisi masuk pad, dan sisi keluar pad. Proses pendinginan udara terendah dapat dicapai hingga temperatur 26,25˚C dan tingkat dehumidifikasi jumlah massa uap air terendah didapatkan 0.01717kg/kg dengan menggunakan temperatur udara inlet sebesar 28,6˚C, sedangkan tingkat kelembaban relatif udara terendah sebesar 55.65% dapat dicapai dengan menggunakan temperatur udara inlet sebesar 39,33˚C.
Kata kunci: Temperatur Inlet, Kelembaban Relatif, Jumlah masa Uap air
Abstract
In the dry season the air temperature in Bali can reach 30-35˚C with a high enough humidity level. Meanwhile, in the rainy season the air temperature has decreased around 26-30˚C but humidity is likely to continue to rise. This is what prompted the author to analyze the effect of variations in inlet air temperature on a decrease in dry ball temperature and a decrease in the moisture content in the air in the Indirect Evaporative Cooling system. This study used variations in inlet air temperature of 28,6˚C, 35,03˚C, and 39,33˚C with air flow velocity for each temperature 11.3 m/s as well as filling the SDP volume 100% measuring 640cm³ totaling 20 sticks. Record temperature every 15 minutes with a span of 60 minutes on the fan inlet, pad inlet, and pad exit.The lowest air cooling process can be achieved up to a temperature of 26,25 C and the dehumidification rate of the lowest mass of water vapor was 0.01717kg/kg by using an inlet air temperature of 28,6˚C, while the lowest relative humidity level of 55.65% can be achieved by using an inlet air temperature of 39.33 ˚C
Keywords: Temperatur inlet, relative humidity, Mass amount of water vapor
1. Pendahuluan Kondisi iklim di Negara Indonesia khusunya wilayah
Bali pada musin kemarau bisa mencapai temperatur 30-35˚C dan kelembaban udaranya cukup tinggi berkisar 70-80% sedangkan pada musim hujan temperatur mengalami penurunan mencapai 26-30˚C akan tetapi kelembaban udara kemungkinan meningkat. Bisa di ambil kesimpulan bahwa kondisi iklim di Negara Indonesia bersifat panas dan lembab (basah). Kondisi ini kurang nyaman untuk orang Indonesia melakukan aktifitasnya berdasarkan penelitian Basaria Talarosha (2005) Suhu nyaman thermal untuk orang Indonesia berada pada rentang suhu 22,8°C - 25,8°C.[1] dan kelembaban relatif 30-60%.(ASHRAE standard 62-1989)[2].Maka dari itu di perlukan sistem pendingin yang mampu mengatasi fluktuasi temperatur udara.
Karena sistem pendingin yang umum digunakan di Indonesia berbasis kompresor dan banyak menghabiskan energi listrik. Banyak peneliti saat ini mencari sistem pendingin alternatif. salah satunya ialah sistem Indirect Evaporative Cooling. Sistem ini mendinginkan udara tanpa adanya kontak langsung antara udara yang didinginkkan dengan media pendinginannya. Bedasarkan ulasan tersebut dimana tidak adanya kontak langsung antara udara dan media pendinginnya. Penulis disarankan oleh pembimbing
untuk menggunakan media Dry Ice (es kering) sehingga nantinya sistem pendingin ini dinamakan System Indirect Evaporative Cooling berbasis Solid Dry Pad.
Dengan Sistem Indirect Evaporative Cooling berbasis Solid Dry Pad dan kondisi iklim di Negara Indonesia yang bersifat panas dan lembab(basah) penulis terdorong untuk untuk menganalisa pengaruh variasi temperatur udara inlet pada sistem Indirect Evaporative Cooling berbasis Solid Dry Pad dan berharap sistem ini mampu mengondisikan suhu udara nyaman dan kelembaban relatif medekati standard ASHRAE serta tujuan peneliatian ini nantinya untuk menganalisa pengaruh variasi temperatur udara inlet terhadap penurunan temperatur bola kering dan kelembaban relatif udara yang terjadi pada udara keluaran solid dry pad.
2. Dasar Teori
Sistem IEC (indirect evaporative cooler) sering disebut sebagai sistem pendinginan sensible, karena hanya terjadi perpindahan panas sensible antara udara yang didinginkan dengan media pendingin air melalui media material penukar panas untuk cara kerjannya sendiri dapat-kita-lihat-pada-gambar-di bawah-ini
Aditias Satria Nugroho et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 7
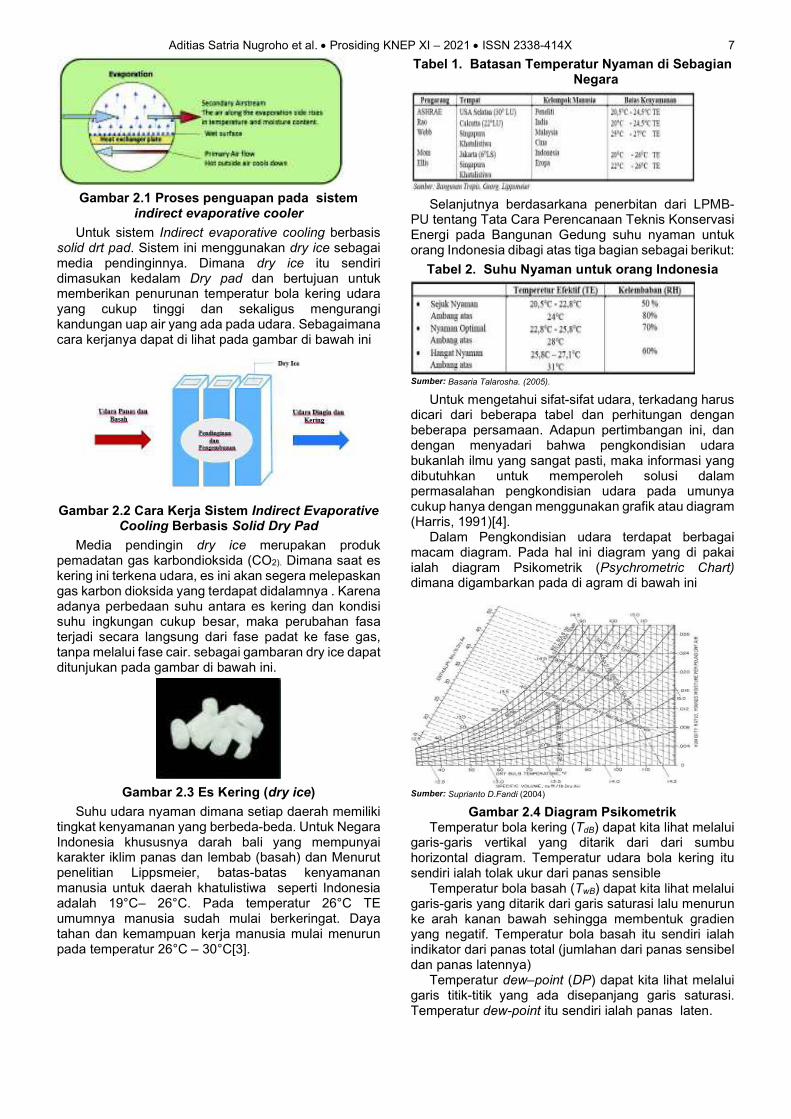
Gambar 2.1 Proses penguapan pada sistem indirect evaporative cooler
Untuk sistem Indirect evaporative cooling berbasis solid drt pad. Sistem ini menggunakan dry ice sebagai media pendinginnya. Dimana dry ice itu sendiri dimasukan kedalam Dry pad dan bertujuan untuk memberikan penurunan temperatur bola kering udara yang cukup tinggi dan sekaligus mengurangi kandungan uap air yang ada pada udara. Sebagaimana cara kerjanya dapat di lihat pada gambar di bawah ini
Gambar 2.2 Cara Kerja Sistem Indirect Evaporative Cooling Berbasis Solid Dry Pad
Media pendingin dry ice merupakan produk pemadatan gas karbondioksida (CO2). Dimana saat es kering ini terkena udara, es ini akan segera melepaskan gas karbon dioksida yang terdapat didalamnya . Karena adanya perbedaan suhu antara es kering dan kondisi suhu ingkungan cukup besar, maka perubahan fasa terjadi secara langsung dari fase padat ke fase gas, tanpa melalui fase cair. sebagai gambaran dry ice dapat ditunjukan pada gambar di bawah ini.
Gambar 2.3 Es Kering (dry ice)
Suhu udara nyaman dimana setiap daerah memiliki tingkat kenyamanan yang berbeda-beda. Untuk Negara Indonesia khususnya darah bali yang mempunyai karakter iklim panas dan lembab (basah) dan Menurut penelitian Lippsmeier, batas-batas kenyamanan manusia untuk daerah khatulistiwa seperti Indonesia adalah 19°C– 26°C. Pada temperatur 26°C TE umumnya manusia sudah mulai berkeringat. Daya tahan dan kemampuan kerja manusia mulai menurun pada temperatur 26°C – 30°C[3].
Tabel 1. Batasan Temperatur Nyaman di Sebagian Negara
Selanjutnya berdasarkana penerbitan dari LPMB-PU tentang Tata Cara Perencanaan Teknis Konservasi Energi pada Bangunan Gedung suhu nyaman untuk orang Indonesia dibagi atas tiga bagian sebagai berikut:
Tabel 2. Suhu Nyaman untuk orang Indonesia
Sumber: Basaria Talarosha. (2005).
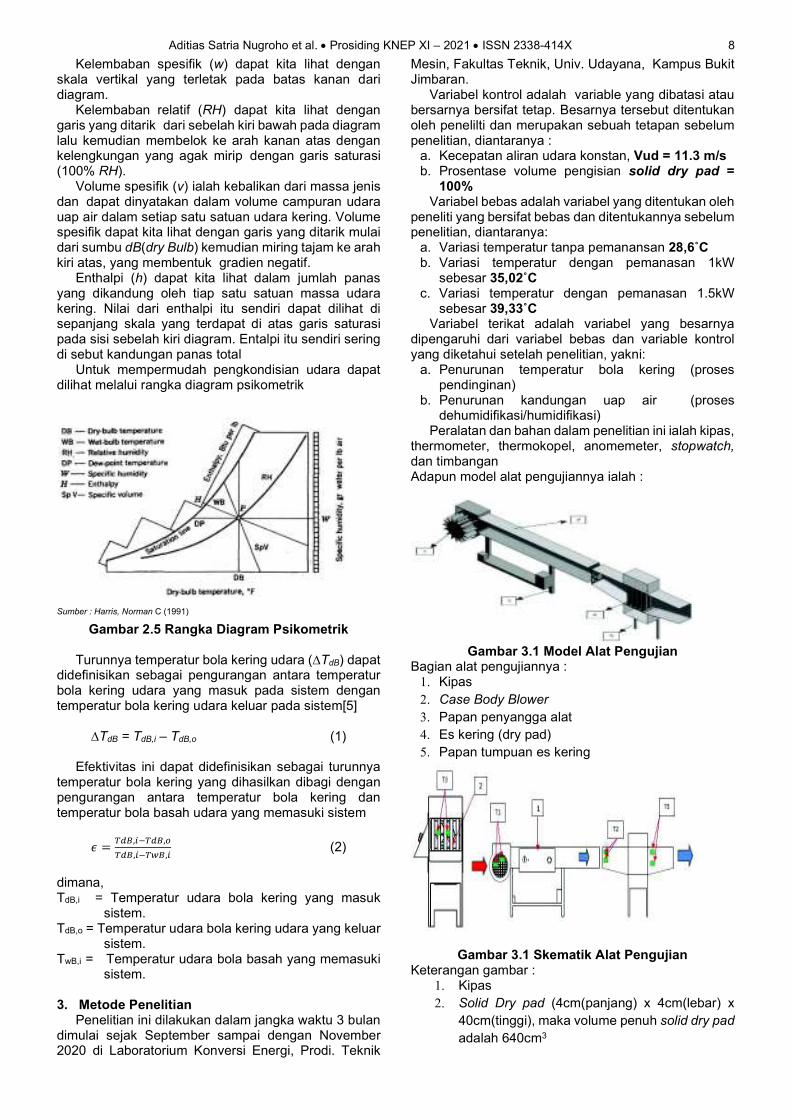
Untuk mengetahui sifat-sifat udara, terkadang harus dicari dari beberapa tabel dan perhitungan dengan beberapa persamaan. Adapun pertimbangan ini, dan dengan menyadari bahwa pengkondisian udara bukanlah ilmu yang sangat pasti, maka informasi yang dibutuhkan untuk memperoleh solusi dalam permasalahan pengkondisian udara pada umunya cukup hanya dengan menggunakan grafik atau diagram (Harris, 1991)[4].
Dalam Pengkondisian udara terdapat berbagai macam diagram. Pada hal ini diagram yang di pakai ialah diagram Psikometrik (Psychrometric Chart) dimana digambarkan pada di agram di bawah ini
Sumber: Suprianto D.Fandi (2004)
Gambar 2.4 Diagram Psikometrik Temperatur bola kering (TdB) dapat kita lihat melalui
garis-garis vertikal yang ditarik dari dari sumbu horizontal diagram. Temperatur udara bola kering itu sendiri ialah tolak ukur dari panas sensible
Temperatur bola basah (TwB) dapat kita lihat melalui garis-garis yang ditarik dari garis saturasi lalu menurun ke arah kanan bawah sehingga membentuk gradien yang negatif. Temperatur bola basah itu sendiri ialah indikator dari panas total (jumlahan dari panas sensibel dan panas latennya)
Temperatur dew–point (DP) dapat kita lihat melalui garis titik-titikayang ada disepanjang garis saturasi. Temperatur dew-point itu sendiri ialah panas_laten.
Aditias Satria Nugroho et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 8
Kelembabanaspesifik (w) dapat kita lihat dengan skala vertikal yang terletak pada batas kanan dari diagram.
Kelembabanarelatif (RH) dapat kita lihat dengan garis yang ditarikadari sebelah kiri bawah pada diagram lalu kemudian membelok ke arah kanan atas dengan kelengkungan yang agak miripadengan garis saturasi (100% RH).
Volume spesifik (v) ialah kebalikan dari massa jenis danadapat dinyatakan dalam volume campuran udara uap air dalam setiap satu satuan udara kering. Volume spesifik dapat kita lihat dengan garis yang ditarik mulai dari sumbu dB(dry Bulb) kemudian miring tajam ke arah kiri atas, yang membentuk_gradien negatif.
Enthalpi (h) dapat kita lihat dalamajumlahapanas yang dikandung oleh tiap satu satuan massa udara kering. Nilai dari enthalpi itu sendiri dapat dilihat di sepanjang skala yang terdapat di atas garis saturasi pada sisi sebelah kiri diagram. Entalpi itu sendiri sering di sebut kandungan panas total
Untuk mempermudah pengkondisian udara dapat dilihat melalui rangka diagram psikometrik
Sumber : Harris, Norman C (1991)
Gambar 2.5 Rangka Diagram Psikometrik
Turunnya temperatur bola kering udara (∆TdB) dapat didefinisikan sebagai pengurangan antara temperatur bola kering udara yang masuk pada sistem dengan temperatur bola kering udara keluar pada sistem[5]
∆TdB = TdB,i – TdB,o (1)
Efektivitas ini dapat didefinisikan sebagai turunnya temperatur bola kering yang dihasilkan dibagi dengan pengurangan antara temperatur bola kering dan temperatur bola basah udara yang memasuki sistem
(2)
dimana, TdB,i = Temperatur udara bola kering yang masuk
sistem. TdB,o = Temperatur udara bola kering udara yang keluar
sistem. TwB,i = Temperatur udara bola basah yang memasuki
sistem.
3. Metode Penelitian Penelitian ini dilakukan dalam jangka waktu 3 bulan
dimulai sejak September sampai dengan November 2020 di Laboratorium Konversi Energi, Prodi. Teknik
Mesin, Fakultas Teknik, Univ. Udayana, Kampus Bukit Jimbaran.
Variabel kontrol adalah variable yang dibatasi atau bersarnya bersifat tetap. Besarnya tersebut ditentukan oleh penelilti dan merupakan sebuah tetapan sebelum penelitian, diantaranya :
a. Kecepatan aliran udara konstan, Vud = 11.3 m/s b. Prosentase volume pengisian solid dry pad =
100% Variabel bebas adalah variabel yang ditentukan oleh
peneliti yang bersifat bebas dan ditentukannya sebelum penelitian, diantaranya:
a. Variasi temperatur tanpa pemanansan 28,6˚C b. Variasi temperatur dengan pemanasan 1kW
sebesar 35,02˚C c. Variasi temperatur dengan pemanasan 1.5kW
sebesar 39,33˚C Variabel terikat adalah variabel yang besarnya
dipengaruhi dari variabel bebas dan variable kontrol yang diketahui setelah penelitian, yakni:
a. Penurunan temperatur bola kering (proses pendinginan)
b. Penurunan kandungan uap air (proses dehumidifikasi/humidifikasi)
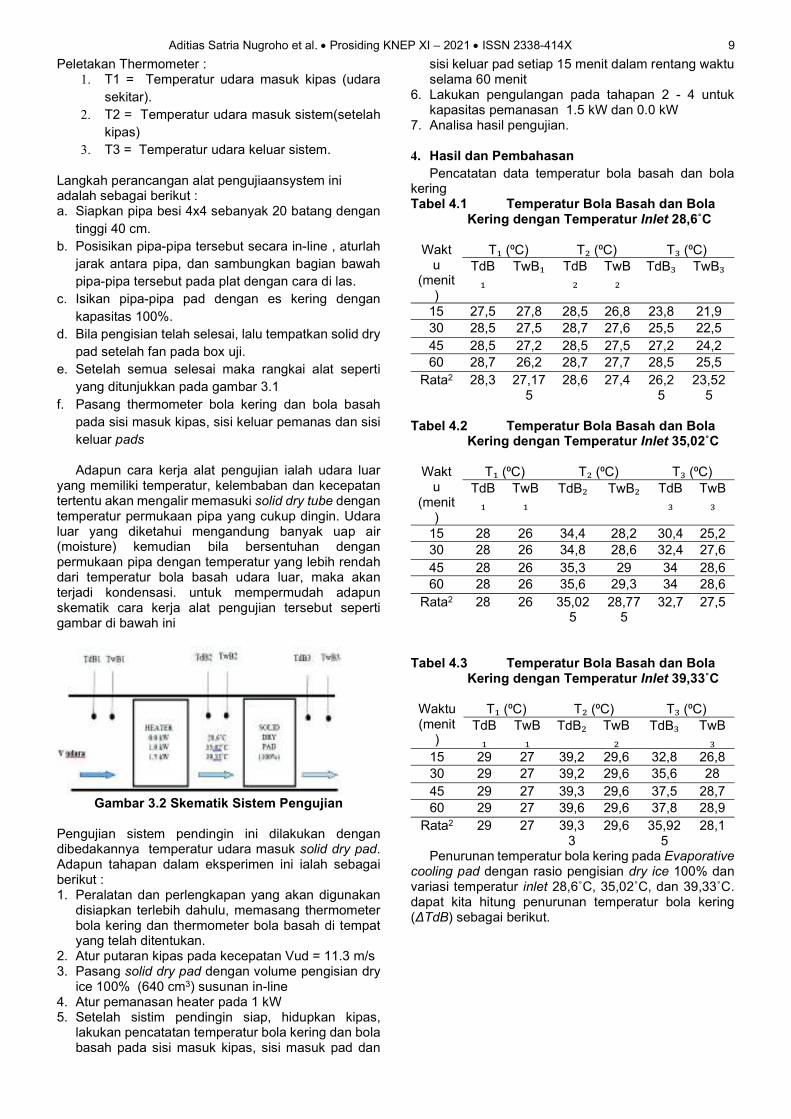
Peralatan dan bahan dalam penelitian ini ialah kipas, thermometer, thermokopel, anomemeter, stopwatch, dan timbangan Adapun model alat pengujiannya ialah :
Gambar 3.1 Model Alat Pengujian
Bagian alat pengujiannya : 1. Kipas
2. Case Body Blower
3. Papan penyangga alat
4. Es kering (dry pad)
5. Papan tumpuan es kering
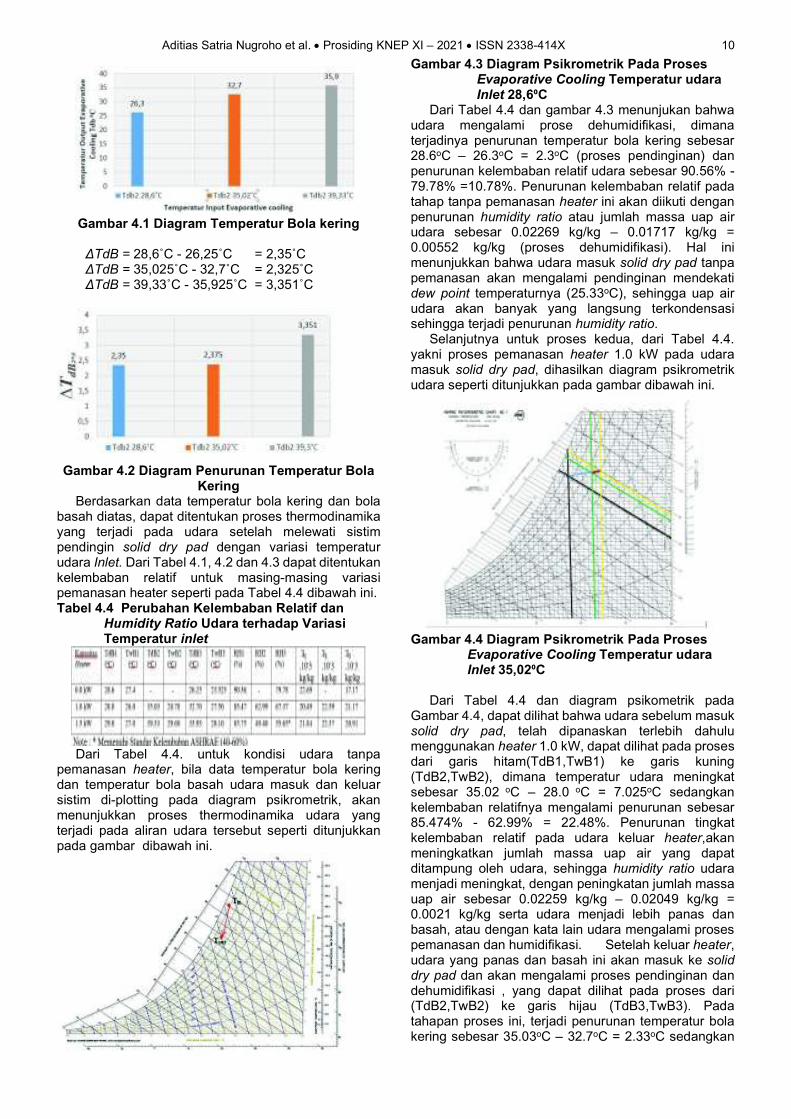
Gambar 3.1 Skematik Alat Pengujian Keterangan gambar :
1. Kipas
2. Solid Dry pad (4cm(panjang) x 4cm(lebar) x
40cm(tinggi), maka volume penuh solid dry pad
adalah 640cm3
Aditias Satria Nugroho et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 9
Peletakan Thermometer : 1. T1 = Temperatur udara masuk kipas (udara
sekitar).
2. T2 = Temperatur udara masuk sistem(setelah
kipas)
3. T3 = Temperatur udara keluar sistem.
Langkah perancangan alat pengujiaansystem ini adalah sebagai berikut : a. Siapkan pipa besi 4x4 sebanyak 20 batang dengan
tinggi 40 cm.
b. Posisikan pipa-pipa tersebut secara in-line , aturlah
jarak antara pipa, dan sambungkan bagian bawah
pipa-pipa tersebut pada plat dengan cara di las.
c. Isikan pipa-pipa pad dengan es kering dengan
kapasitas 100%.
d. Bila pengisian telah selesai, lalu tempatkan solid dry
pad setelah fan pada box uji.
e. Setelah semua selesai maka rangkai alat seperti
yang ditunjukkan pada gambar 3.1
f. Pasang thermometer bola kering dan bola basah
pada sisi masuk kipas, sisi keluar pemanas dan sisi
keluar pads
Adapun cara kerja alat pengujian ialah udara luar yang memiliki temperatur, kelembaban dan kecepatan tertentu akan mengalir memasuki solid dry tube dengan temperatur permukaan pipa yang cukup dingin. Udara luar yang diketahui mengandung banyak uap air (moisture) kemudian bila bersentuhan dengan permukaan pipa dengan temperatur yang lebih rendah dari temperatur bola basah udara luar, maka akan terjadi kondensasi. untuk mempermudah adapun skematik cara kerja alat pengujian tersebut seperti gambar di bawah ini
Gambar 3.2 Skematik Sistem Pengujian
Pengujian sistem pendingin ini dilakukan dengan dibedakannya temperatur udara masuk solid dry pad. Adapun tahapan dalam eksperimen ini ialah sebagai berikut : 1. Peralatan dan perlengkapan yang akan digunakan
disiapkan terlebih dahulu, memasang thermometer bola kering dan thermometer bola basah di tempat yang telah ditentukan.
2. Atur putaran kipas pada kecepatan Vud = 11.3 m/s 3. Pasang solid dry pad dengan volume pengisian dry
ice 100% (640 cm3) susunan in-line 4. Atur pemanasan heater pada 1 kW 5. Setelah sistim pendingin siap, hidupkan kipas,
lakukan pencatatan temperatur bola kering dan bola basah pada sisi masuk kipas, sisi masuk pad dan
sisi keluar pad setiap 15 menit dalam rentang waktu selama 60 menit
6. Lakukan pengulangan pada tahapan 2 - 4 untuk kapasitas pemanasan 1.5 kW dan 0.0 kW
7. Analisa hasil pengujian. 4. Hasil dan Pembahasan
Pencatatan data temperatur bola basah dan bola kering Tabel 4.1 Temperatur Bola Basah dan Bola
Kering dengan Temperatur Inlet 28,6˚C
Waktu
(menit)
T (⁰C) T (⁰C) T (⁰C)
TdB
TwB TdB
TwB
TdB TwB
15 27,5 27,8 28,5 26,8 23,8 21,9
30 28,5 27,5 28,7 27,6 25,5 22,5
45 28,5 27,2 28,5 27,5 27,2 24,2
60 28,7 26,2 28,7 27,7 28,5 25,5
Rata2 28,3 27,175
28,6 27,4 26,25
23,525
Tabel 4.2 Temperatur Bola Basah dan Bola
Kering dengan Temperatur Inlet 35,02˚C
Waktu
(menit)
T (⁰C) T (⁰C) T (⁰C)
TdB
TwB
TdB TwB TdB
TwB
15 28 26 34,4 28,2 30,4 25,2
30 28 26 34,8 28,6 32,4 27,6
45 28 26 35,3 29 34 28,6
60 28 26 35,6 29,3 34 28,6
Rata2 28 26 35,025
28,775
32,7 27,5
Tabel 4.3 Temperatur Bola Basah dan Bola
Kering dengan Temperatur Inlet 39,33˚C
Waktu (menit
)
T (⁰C) T (⁰C) T (⁰C)
TdB
TwB
TdB TwB
TdB TwB
15 29 27 39,2 29,6 32,8 26,8
30 29 27 39,2 29,6 35,6 28
45 29 27 39,3 29,6 37,5 28,7
60 29 27 39,6 29,6 37,8 28,9
Rata2 29 27 39,33
29,6 35,925
28,1
Penurunan temperatur bola kering pada Evaporative cooling pad dengan rasio pengisian dry ice 100% dan variasi temperatur inlet 28,6˚C, 35,02˚C, dan 39,33˚C. dapat kita hitung penurunan temperatur bola kering (ΔTdB) sebagai berikut.
Aditias Satria Nugroho et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 10
Gambar 4.1 Diagram Temperatur Bola kering
ΔTdB = 28,6˚C - 26,25˚C = 2,35˚C ΔTdB = 35,025˚C - 32,7˚C = 2,325˚C ΔTdB = 39,33˚C - 35,925˚C = 3,351˚C
Gambar 4.2 Diagram Penurunan Temperatur Bola
Kering Berdasarkan data temperatur bola kering dan bola
basah diatas, dapat ditentukan proses thermodinamika yang terjadi pada udara setelah melewati sistim pendingin solid dry pad dengan variasi temperatur udara Inlet. Dari Tabel 4.1, 4.2 dan 4.3 dapat ditentukan kelembaban relatif untuk masing-masing variasi pemanasan heater seperti pada Tabel 4.4 dibawah ini. Tabel 4.4 Perubahan Kelembaban Relatif dan
Humidity Ratio Udara terhadap Variasi Temperatur inlet
Dari Tabel 4.4. untuk kondisi udara tanpa
pemanasan heater, bila data temperatur bola kering dan temperatur bola basah udara masuk dan keluar sistim di-plotting pada diagram psikrometrik, akan menunjukkan proses thermodinamika udara yang terjadi pada aliran udara tersebut seperti ditunjukkan pada gambar dibawah ini.
Gambar 4.3 Diagram Psikrometrik Pada Proses Evaporative Cooling Temperatur udara Inlet 28,6⁰C
Dari Tabel 4.4 dan gambar 4.3 menunjukan bahwa udara mengalami prose dehumidifikasi, dimana terjadinya penurunan temperatur bola kering sebesar 28.6oC – 26.3oC = 2.3oC (proses pendinginan) dan penurunan kelembaban relatif udara sebesar 90.56% - 79.78% =10.78%. Penurunan kelembaban relatif pada tahap tanpa pemanasan heater ini akan diikuti dengan penurunan humidity ratio atau jumlah massa uap air udara sebesar 0.02269 kg/kg – 0.01717 kg/kg = 0.00552 kg/kg (proses dehumidifikasi). Hal ini menunjukkan bahwa udara masuk solid dry pad tanpa pemanasan akan mengalami pendinginan mendekati dew point temperaturnya (25.33oC), sehingga uap air udara akan banyak yang langsung terkondensasi sehingga terjadi penurunan humidity ratio.
Selanjutnya untuk proses kedua, dari Tabel 4.4. yakni proses pemanasan heater 1.0 kW pada udara masuk solid dry pad, dihasilkan diagram psikrometrik udara seperti ditunjukkan pada gambar dibawah ini.
Gambar 4.4 Diagram Psikrometrik Pada Proses
Evaporative Cooling Temperatur udara Inlet 35,02⁰C
Dari Tabel 4.4 dan diagram psikometrik pada
Gambar 4.4, dapat dilihat bahwa udara sebelum masuk solid dry pad, telah dipanaskan terlebih dahulu menggunakan heater 1.0 kW, dapat dilihat pada proses dari garis hitam(TdB1,TwB1) ke garis kuning (TdB2,TwB2), dimana temperatur udara meningkat sebesar 35.02 oC – 28.0 oC = 7.025oC sedangkan kelembaban relatifnya mengalami penurunan sebesar 85.474% - 62.99% = 22.48%. Penurunan tingkat kelembaban relatif pada udara keluar heater,akan meningkatkan jumlah massa uap air yang dapat ditampung oleh udara, sehingga humidity ratio udara menjadi meningkat, dengan peningkatan jumlah massa uap air sebesar 0.02259 kg/kg – 0.02049 kg/kg = 0.0021 kg/kg serta udara menjadi lebih panas dan basah, atau dengan kata lain udara mengalami proses pemanasan dan humidifikasi. Setelah keluar heater, udara yang panas dan basah ini akan masuk ke solid dry pad dan akan mengalami proses pendinginan dan dehumidifikasi , yang dapat dilihat pada proses dari (TdB2,TwB2) ke garis hijau (TdB3,TwB3). Pada tahapan proses ini, terjadi penurunan temperatur bola kering sebesar 35.03oC – 32.7oC = 2.33oC sedangkan
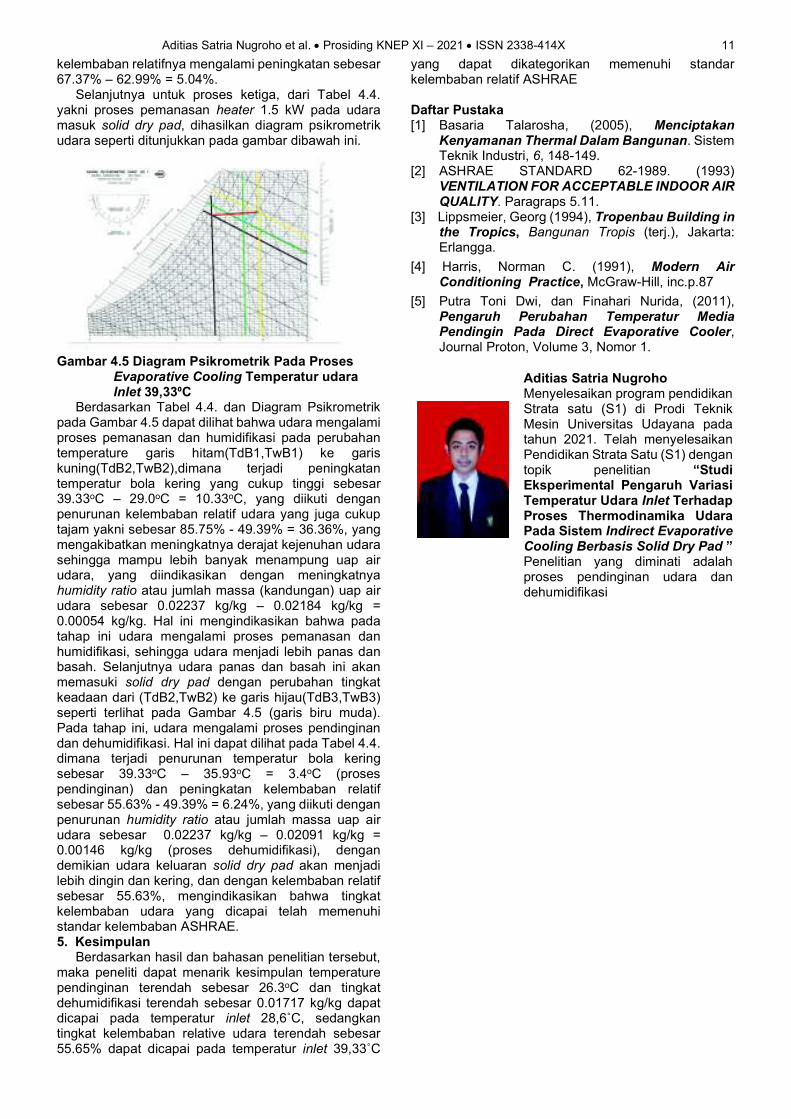
Aditias Satria Nugroho et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 11
kelembaban relatifnya mengalami peningkatan sebesar 67.37% – 62.99% = 5.04%.
Selanjutnya untuk proses ketiga, dari Tabel 4.4. yakni proses pemanasan heater 1.5 kW pada udara masuk solid dry pad, dihasilkan diagram psikrometrik udara seperti ditunjukkan pada gambar dibawah ini.
Gambar 4.5 Diagram Psikrometrik Pada Proses
Evaporative Cooling Temperatur udara Inlet 39,33⁰C
Berdasarkan Tabel 4.4. dan Diagram Psikrometrik pada Gambar 4.5 dapat dilihat bahwa udara mengalami proses pemanasan dan humidifikasi pada perubahan temperature garis hitam(TdB1,TwB1) ke garis kuning(TdB2,TwB2),dimana terjadi peningkatan temperatur bola kering yang cukup tinggi sebesar 39.33oC – 29.0oC = 10.33oC, yang diikuti dengan penurunan kelembaban relatif udara yang juga cukup tajam yakni sebesar 85.75% - 49.39% = 36.36%, yang mengakibatkan meningkatnya derajat kejenuhan udara sehingga mampu lebih banyak menampung uap air udara, yang diindikasikan dengan meningkatnya humidity ratio atau jumlah massa (kandungan) uap air udara sebesar 0.02237 kg/kg – 0.02184 kg/kg = 0.00054 kg/kg. Hal ini mengindikasikan bahwa pada tahap ini udara mengalami proses pemanasan dan humidifikasi, sehingga udara menjadi lebih panas dan basah. Selanjutnya udara panas dan basah ini akan memasuki solid dry pad dengan perubahan tingkat keadaan dari (TdB2,TwB2) ke garis hijau(TdB3,TwB3) seperti terlihat pada Gambar 4.5 (garis biru muda). Pada tahap ini, udara mengalami proses pendinginan dan dehumidifikasi. Hal ini dapat dilihat pada Tabel 4.4. dimana terjadi penurunan temperatur bola kering sebesar 39.33oC – 35.93oC = 3.4oC (proses pendinginan) dan peningkatan kelembaban relatif sebesar 55.63% - 49.39% = 6.24%, yang diikuti dengan penurunan humidity ratio atau jumlah massa uap air udara sebesar 0.02237 kg/kg – 0.02091 kg/kg = 0.00146 kg/kg (proses dehumidifikasi), dengan demikian udara keluaran solid dry pad akan menjadi lebih dingin dan kering, dan dengan kelembaban relatif sebesar 55.63%, mengindikasikan bahwa tingkat kelembaban udara yang dicapai telah memenuhi standar kelembaban ASHRAE. 5. Kesimpulan
Berdasarkan hasil dan bahasan penelitian tersebut, maka peneliti dapat menarik kesimpulan temperature pendinginan terendah sebesar 26.3oC dan tingkat dehumidifikasi terendah sebesar 0.01717 kg/kg dapat dicapai pada temperatur inlet 28,6˚C, sedangkan tingkat kelembaban relative udara terendah sebesar 55.65% dapat dicapai pada temperatur inlet 39,33˚C
yang dapat dikategorikan memenuhi standar kelembaban relatif ASHRAE Daftar Pustaka [1] Basaria Talarosha, (2005), Menciptakan
Kenyamanan Thermal Dalam Bangunan. Sistem Teknik Industri, 6, 148-149.
[2] ASHRAE STANDARD 62-1989. (1993) VENTILATION FOR ACCEPTABLE INDOOR AIR QUALITY. Paragraps 5.11.
[3] Lippsmeier, Georg (1994), Tropenbau Building in the Tropics, Bangunan Tropis (terj.), Jakarta: Erlangga.
[4] Harris, Norman C. (1991), Modern Air Conditioning_Practice, McGraw-Hill, inc.p.87
[5] Putra Toni Dwi, dan Finahari Nurida, (2011), Pengaruh Perubahan Temperatur Media Pendingin Pada Direct Evaporative Cooler, Journal Proton, Volume 3, Nomor 1.
Aditias Satria Nugroho Menyelesaikan program pendidikan Strata satu (S1) di Prodi Teknik Mesin Universitas Udayana pada tahun 2021. Telah menyelesaikan Pendidikan Strata Satu (S1) dengan topik penelitian “Studi Eksperimental Pengaruh Variasi Temperatur Udara Inlet Terhadap Proses Thermodinamika Udara Pada Sistem Indirect Evaporative Cooling Berbasis Solid Dry Pad ” Penelitian yang diminati adalah proses pendinginan udara dan dehumidifikasi

Prosiding Konferensi Nasional Engineering Perhotelan XI, Universitas Udayana - 2021
ISSN 2338-414X
*Korespondensi: Tel./Fax.: 08114411699 E-mail: [email protected]
ÓTeknik Mesin Universitas Udayana 2021
Fenomena Wake Fraction Pada Suatu Model Buritan Kapal
Jose Paulo Vincenzio Soares Ximenes1) *, Anak Agung Adhi Suryawan2), I Gusti Ketut Sukadana3)
1,2,3)Jurusan Teknik Mesin Universitas Udayana, Kampus Bukit Jimbaran Bali
Abstrak Wake Fraction merupakan salah satu faktor yang menentukan efisiensi dari suatu kapal. Semakin besar wake yang terjadi maka daya yang diperlukan kapal untuk dapat melaju dengan kecepatan yang diinginkan akan semakin besar. Perbedaan pada model buritan dari kapal itu sendiri akan menghasilkan pola serta nilai wake yang berbeda pula. Penelitian ini dilakukan secara eksperimental menggunakan sebuah water tunnel dan menggunakan model buritan kapal lengkap dengan propeller serta ruddernya, dimana model kapal divariasikan sebanyak tiga model untuk melihat perbedaan dari wake yang dihasilkan dari masing-masing model buritan kapal. Semakin besar sudut model kapal bagian atas yang divariasikan maka tekanan yang dihasilkan lebih rendah serta minim terjadinya penurunan tekanan yang signifikan dibandingkan model-model lainnya. Hal ini mengindikasikan wake yang terjadi lebih minim serta kecepatan aliran yang dihasilkan lebih tinggi dibandingkan dengan kedua model lainnya yang diuji dalam penelitian ini. Kata kunci: propeller, rudder, pola aliran, distribusi tekanan statis, model buritan kapal, wake, wake fraction.
Abstract
Wake Fraction is one of many factors that determine a ship’s efficiency. The bigger the wake the bigger the power of the ship is needed to reach the desired speed. The difference of the stern ship model itself will produce different pattern and value of the wake. This research is done experimentally with a unit of water tunnel and stern ship models complete with its propeller and rudder, where the stern ship model is variated in three models to see the difference of the wake that produced by each of stern ship models. The bigger the degree of the top of stern ship model that variated, the smaller the pressure that produced, also the significant dropping of the pressure is minimum compared with the other models. This indicate wake that produced is minimum and the flow speed produced is higher compared to the other two models that being tested in this research.
Keywords: propeller, rudder, flow pattern, static pressure distribution, stern model of ship, wake, wake fraction.
1. Pendahuluan
Untuk dapat beroperasi secara maksimal di kondisi laut Indonesia yang terbentang luas dan dalam beragam cuaca, kapal dituntut untuk dapat memiliki kemampuan maneuverability yang baik. Selain memiliki kemampuan maneuverability yang baik, kapal juga dituntut harus memiliki tingkat efisiensi yang baik demi menghasilkan biaya operasi seminimal mungkin. Efisiensi dari kapal sebagian besar dipengaruhi oleh gaya hambat yang terjadi pada lambung serta buritan kapal dan juga nilai wake/arus ikut kapal. Dari setiap aliran air bergerak pada sebuah badan kapal dari bagian depan kapal sampai buritan kapal, akan selalu terdapat wake atau arus ikut yang merupakan perbandingan antara kecepatan dari kapal itu sendiri dengan kecepatan fluida berupa air yang mengalir melalui propeller penggerak kapal. Semakin besar wake terjadi akan mengakibatkan Va menjadi lebih kecil. Dengan Va semakin kecil maka daya yang dibutuhkan untuk mendorong kapal untuk mencapai kecepatan dinas yang dibutuhkan akan menjadi lebih besar. Hal ini otomatis akan berpengaruh terhadap konsumsi bahan bakar serta biaya operasi dari kapal.
Wake dapat terjadi pada sebuah kapal dikarenakan pengaruh dari lambung kapal itu sendiri yang dimana air akan mengalir menuju buritan kapal dan membentuk arus atau juga karena gerakan propeller kapal sehingga di daerah sekitar baling-baling akan terdapat arus sesuai arah gerak baling-baling tersebut. Sebagai komponen yang bergerak, dalam perancangan serta pembuatan model buritan kapal harus memperhitungkan wake fraction tersebut demi mengejar efektivitas biaya operasi kapal. Oleh karena itu, dalam penelitian ini penulis ingin membahas lebih dalam mengenai fenomena terjadinya wake fraction pada suatu model buritan kapal.
Adapun permasalahan yang akan dikaji, yaitu: Bagaimana pengaruh variasi model buritan kapal terhadap fenomena wake fraction dilihat distribusi tekanan.
Batasan - batasan yang ditetapkan pada penelitian ini meliputi: 1. Rotasi propeller yang digunakan ialah 2900rpm. 2. Propeller yang digunakan memiliki jumlah sudu
sebanyak 3 buah.
Jose Paulo Vincenzio SX et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 13
3. Rudder yang digunakan ialah rudder jenis RC Boat FT012-4.
4. Beban arus dan gelombang diabaikan.
2. Metode Penelitian
Untuk mengukur perubahan tekanan yang kecil, inclined manometer dengan sudut θ dan perbedaan dari L adalah nilai pengukuran perubahan ketinggian sepanjang inclined-tube. Inclined manometer dapat di gunakan untuk mengukur perbedaan tekanan yang kecil dengan akurat [1]. Untuk mendapatkan nilai tekanan udara pada inclined manometer, dapat digunakan persamaan sebagai berikut:
P = ρair.g. Sgm. hm= … N/m² (Pascal) (1)
hm = Lsinθ (m). ρair = massa jenis air (kg/m3 ). Sgm = specific gravity minyak tanah. g = percepatan gravitasi (m/s2).
Water Tunnel merupakan fasilitas eksperimental yang berfungsi untuk menguji perilaku hidrodinamik dari benda-benda yang terendam dalam air yang mengalir. Fungsinya mirip dengan wind tunnel , tetapi menggunakan air sebagai fluida kerja. Water tunnel dapat memvisualisasikan perilaku aliran pada setiap struktur benda yang terendam di dalam air dan mempelajari fenomena boundary layer yang terjadi [2].
Water tunnel umumnya lebih diutamakan pemakaiannya daripada wind tunnel dimana untuk melakukan pengukuran seperti Particle image velocimetry (PIV) karena visualisasi aliran di water tunnel lebih mudah di kontrol dan pola alirannya menghilang lebih lama dari pada wind tunnel [3].
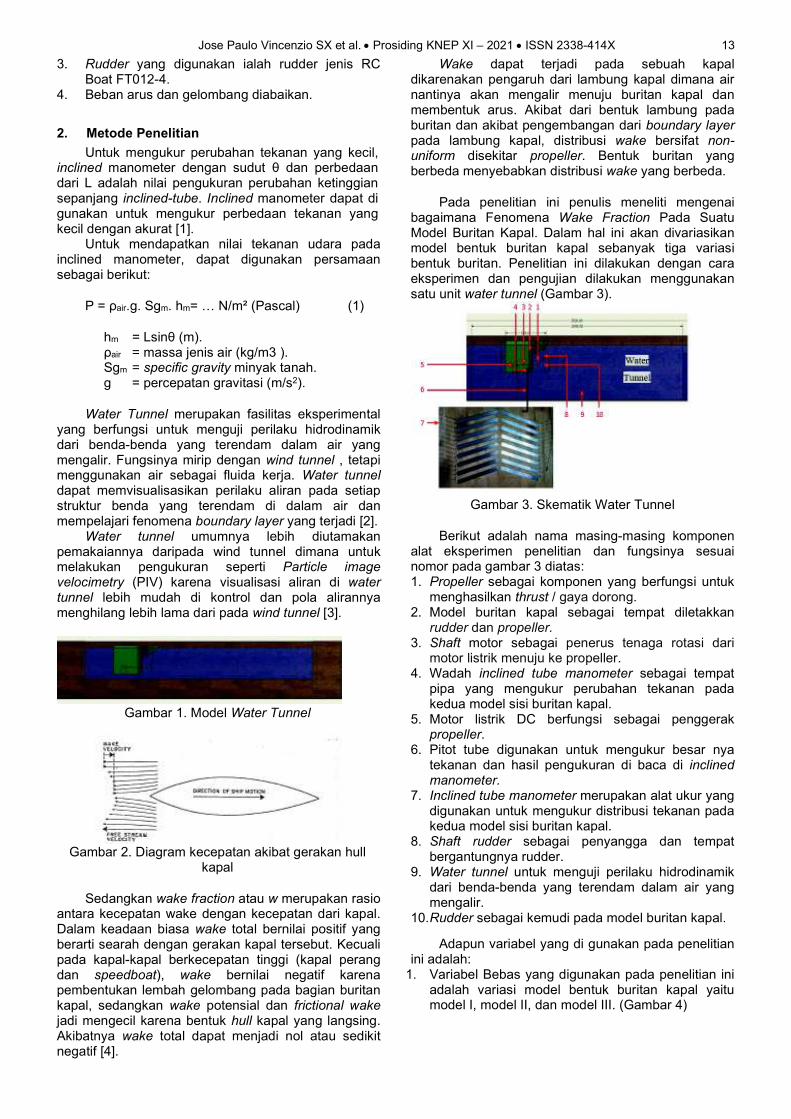
Gambar 1. Model Water Tunnel
Gambar 2. Diagram kecepatan akibat gerakan hull
kapal
Sedangkan wake fraction atau w merupakan rasio antara kecepatan wake dengan kecepatan dari kapal. Dalam keadaan biasa wake total bernilai positif yang berarti searah dengan gerakan kapal tersebut. Kecuali pada kapal-kapal berkecepatan tinggi (kapal perang dan speedboat), wake bernilai negatif karena pembentukan lembah gelombang pada bagian buritan kapal, sedangkan wake potensial dan frictional wake jadi mengecil karena bentuk hull kapal yang langsing. Akibatnya wake total dapat menjadi nol atau sedikit negatif [4].
Wake dapat terjadi pada sebuah kapal dikarenakan pengaruh dari lambung kapal dimana air nantinya akan mengalir menuju buritan kapal dan membentuk arus. Akibat dari bentuk lambung pada buritan dan akibat pengembangan dari boundary layer pada lambung kapal, distribusi wake bersifat non-uniform disekitar propeller. Bentuk buritan yang berbeda menyebabkan distribusi wake yang berbeda.
Pada penelitian ini penulis meneliti mengenai bagaimana Fenomena Wake Fraction Pada Suatu Model Buritan Kapal. Dalam hal ini akan divariasikan model bentuk buritan kapal sebanyak tiga variasi bentuk buritan. Penelitian ini dilakukan dengan cara eksperimen dan pengujian dilakukan menggunakan satu unit water tunnel (Gambar 3).
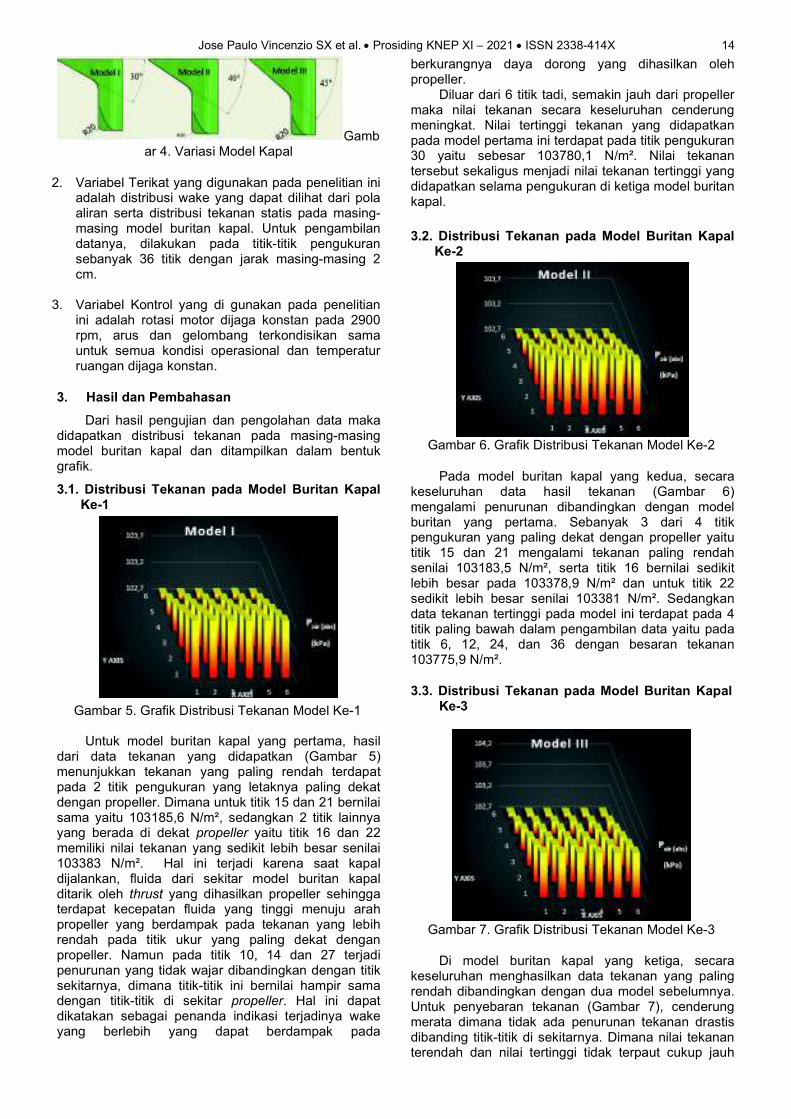
Gambar 3. Skematik Water Tunnel
Berikut adalah nama masing-masing komponen alat eksperimen penelitian dan fungsinya sesuai nomor pada gambar 3 diatas: 1. Propeller sebagai komponen yang berfungsi untuk
menghasilkan thrust / gaya dorong. 2. Model buritan kapal sebagai tempat diletakkan
rudder dan propeller. 3. Shaft motor sebagai penerus tenaga rotasi dari
motor listrik menuju ke propeller. 4. Wadah inclined tube manometer sebagai tempat
pipa yang mengukur perubahan tekanan pada kedua model sisi buritan kapal.
5. Motor listrik DC berfungsi sebagai penggerak propeller.
6. Pitot tube digunakan untuk mengukur besar nya tekanan dan hasil pengukuran di baca di inclined manometer.
7. Inclined tube manometer merupakan alat ukur yang digunakan untuk mengukur distribusi tekanan pada kedua model sisi buritan kapal.
8. Shaft rudder sebagai penyangga dan tempat bergantungnya rudder.
9. Water tunnel untuk menguji perilaku hidrodinamik dari benda-benda yang terendam dalam air yang mengalir.
10. Rudder sebagai kemudi pada model buritan kapal.
Adapun variabel yang di gunakan pada penelitian ini adalah:
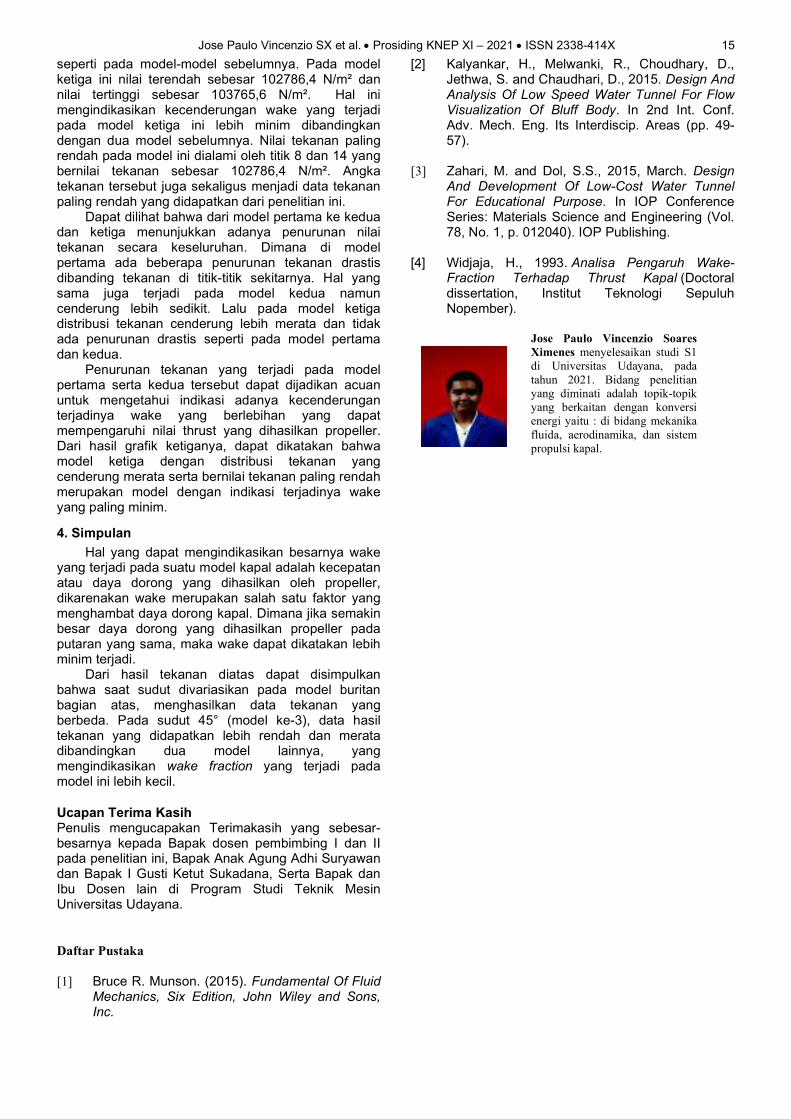
1. Variabel Bebas yang digunakan pada penelitian ini adalah variasi model bentuk buritan kapal yaitu model I, model II, dan model III. (Gambar 4)
Jose Paulo Vincenzio SX et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 14
Gambar 4. Variasi Model Kapal
2. Variabel Terikat yang digunakan pada penelitian ini adalah distribusi wake yang dapat dilihat dari pola aliran serta distribusi tekanan statis pada masing-masing model buritan kapal. Untuk pengambilan datanya, dilakukan pada titik-titik pengukuran sebanyak 36 titik dengan jarak masing-masing 2 cm.
3. Variabel Kontrol yang di gunakan pada penelitian ini adalah rotasi motor dijaga konstan pada 2900 rpm, arus dan gelombang terkondisikan sama untuk semua kondisi operasional dan temperatur ruangan dijaga konstan.
3. Hasil dan Pembahasan
Dari hasil pengujian dan pengolahan data maka didapatkan distribusi tekanan pada masing-masing model buritan kapal dan ditampilkan dalam bentuk grafik.
3.1. Distribusi Tekanan pada Model Buritan Kapal Ke-1
Gambar 5. Grafik Distribusi Tekanan Model Ke-1
Untuk model buritan kapal yang pertama, hasil dari data tekanan yang didapatkan (Gambar 5) menunjukkan tekanan yang paling rendah terdapat pada 2 titik pengukuran yang letaknya paling dekat dengan propeller. Dimana untuk titik 15 dan 21 bernilai sama yaitu 103185,6 N/m², sedangkan 2 titik lainnya yang berada di dekat propeller yaitu titik 16 dan 22 memiliki nilai tekanan yang sedikit lebih besar senilai 103383 N/m². Hal ini terjadi karena saat kapal dijalankan, fluida dari sekitar model buritan kapal ditarik oleh thrust yang dihasilkan propeller sehingga terdapat kecepatan fluida yang tinggi menuju arah propeller yang berdampak pada tekanan yang lebih rendah pada titik ukur yang paling dekat dengan propeller. Namun pada titik 10, 14 dan 27 terjadi penurunan yang tidak wajar dibandingkan dengan titik sekitarnya, dimana titik-titik ini bernilai hampir sama dengan titik-titik di sekitar propeller. Hal ini dapat dikatakan sebagai penanda indikasi terjadinya wake yang berlebih yang dapat berdampak pada
berkurangnya daya dorong yang dihasilkan oleh propeller.
Diluar dari 6 titik tadi, semakin jauh dari propeller maka nilai tekanan secara keseluruhan cenderung meningkat. Nilai tertinggi tekanan yang didapatkan pada model pertama ini terdapat pada titik pengukuran 30 yaitu sebesar 103780,1 N/m². Nilai tekanan tersebut sekaligus menjadi nilai tekanan tertinggi yang didapatkan selama pengukuran di ketiga model buritan kapal.
3.2. Distribusi Tekanan pada Model Buritan Kapal Ke-2
Gambar 6. Grafik Distribusi Tekanan Model Ke-2
Pada model buritan kapal yang kedua, secara keseluruhan data hasil tekanan (Gambar 6) mengalami penurunan dibandingkan dengan model buritan yang pertama. Sebanyak 3 dari 4 titik pengukuran yang paling dekat dengan propeller yaitu titik 15 dan 21 mengalami tekanan paling rendah senilai 103183,5 N/m², serta titik 16 bernilai sedikit lebih besar pada 103378,9 N/m² dan untuk titik 22 sedikit lebih besar senilai 103381 N/m². Sedangkan data tekanan tertinggi pada model ini terdapat pada 4 titik paling bawah dalam pengambilan data yaitu pada titik 6, 12, 24, dan 36 dengan besaran tekanan 103775,9 N/m².
3.3. Distribusi Tekanan pada Model Buritan Kapal Ke-3
Gambar 7. Grafik Distribusi Tekanan Model Ke-3
Di model buritan kapal yang ketiga, secara keseluruhan menghasilkan data tekanan yang paling rendah dibandingkan dengan dua model sebelumnya. Untuk penyebaran tekanan (Gambar 7), cenderung merata dimana tidak ada penurunan tekanan drastis dibanding titik-titik di sekitarnya. Dimana nilai tekanan terendah dan nilai tertinggi tidak terpaut cukup jauh
Jose Paulo Vincenzio SX et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 15
seperti pada model-model sebelumnya. Pada model ketiga ini nilai terendah sebesar 102786,4 N/m² dan nilai tertinggi sebesar 103765,6 N/m². Hal ini mengindikasikan kecenderungan wake yang terjadi pada model ketiga ini lebih minim dibandingkan dengan dua model sebelumnya. Nilai tekanan paling rendah pada model ini dialami oleh titik 8 dan 14 yang bernilai tekanan sebesar 102786,4 N/m². Angka tekanan tersebut juga sekaligus menjadi data tekanan paling rendah yang didapatkan dari penelitian ini.
Dapat dilihat bahwa dari model pertama ke kedua dan ketiga menunjukkan adanya penurunan nilai tekanan secara keseluruhan. Dimana di model pertama ada beberapa penurunan tekanan drastis dibanding tekanan di titik-titik sekitarnya. Hal yang sama juga terjadi pada model kedua namun cenderung lebih sedikit. Lalu pada model ketiga distribusi tekanan cenderung lebih merata dan tidak ada penurunan drastis seperti pada model pertama dan kedua.
Penurunan tekanan yang terjadi pada model pertama serta kedua tersebut dapat dijadikan acuan untuk mengetahui indikasi adanya kecenderungan terjadinya wake yang berlebihan yang dapat mempengaruhi nilai thrust yang dihasilkan propeller. Dari hasil grafik ketiganya, dapat dikatakan bahwa model ketiga dengan distribusi tekanan yang cenderung merata serta bernilai tekanan paling rendah merupakan model dengan indikasi terjadinya wake yang paling minim.
4. Simpulan
Hal yang dapat mengindikasikan besarnya wake yang terjadi pada suatu model kapal adalah kecepatan atau daya dorong yang dihasilkan oleh propeller, dikarenakan wake merupakan salah satu faktor yang menghambat daya dorong kapal. Dimana jika semakin besar daya dorong yang dihasilkan propeller pada putaran yang sama, maka wake dapat dikatakan lebih minim terjadi.
Dari hasil tekanan diatas dapat disimpulkan bahwa saat sudut divariasikan pada model buritan bagian atas, menghasilkan data tekanan yang berbeda. Pada sudut 45° (model ke-3), data hasil tekanan yang didapatkan lebih rendah dan merata dibandingkan dua model lainnya, yang mengindikasikan wake fraction yang terjadi pada model ini lebih kecil.
Ucapan Terima Kasih Penulis mengucapakan Terimakasih yang sebesar-besarnya kepada Bapak dosen pembimbing I dan II pada penelitian ini, Bapak Anak Agung Adhi Suryawan dan Bapak I Gusti Ketut Sukadana, Serta Bapak dan Ibu Dosen lain di Program Studi Teknik Mesin Universitas Udayana.
Daftar Pustaka
[1] Bruce R. Munson. (2015). Fundamental Of Fluid Mechanics, Six Edition, John Wiley and Sons, Inc.
[2] Kalyankar, H., Melwanki, R., Choudhary, D., Jethwa, S. and Chaudhari, D., 2015. Design And Analysis Of Low Speed Water Tunnel For Flow Visualization Of Bluff Body. In 2nd Int. Conf. Adv. Mech. Eng. Its Interdiscip. Areas (pp. 49-57).
[3] Zahari, M. and Dol, S.S., 2015, March. Design And Development Of Low-Cost Water Tunnel For Educational Purpose. In IOP Conference Series: Materials Science and Engineering (Vol. 78, No. 1, p. 012040). IOP Publishing.
[4] Widjaja, H., 1993. Analisa Pengaruh Wake-Fraction Terhadap Thrust Kapal (Doctoral dissertation, Institut Teknologi Sepuluh Nopember).
Jose Paulo Vincenzio Soares
Ximenes menyelesaikan studi S1
di Universitas Udayana, pada
tahun 2021. Bidang penelitian
yang diminati adalah topik-topik
yang berkaitan dengan konversi
energi yaitu : di bidang mekanika
fluida, aerodinamika, dan sistem
propulsi kapal.

Prosiding Konferensi Nasional Engineering Perhotelan XI, Universitas Udayana - 2021
ISSN 2338-414X
*Korespondensi: Tel./Fax.: 0821-68270785 E-mail: [email protected]
ÓTeknik Mesin Universitas Udayana 2021
Pengaruh Sudut Operasional Rudder Terhadap Distribusi Tekanan Total Fluida Pada Permukaan Kontrol Sisi Keluaran Rudder Suatu
Kapal Model Frans H Marpaung 1), Anak Agung Adhi Suryawan2), I Gusti Ketut Sukadana3)
1,2,3)Jurusan Teknik Mesin Universitas Udayana, Kampus Bukit Jimbaran Bali
Abstrak Kapal sebagai alat transportasi laut dengan efisiensi pengangkutan yang baik menuntut kapal beroperasi dengan mobilitas yang tinggi. Dimana kemampuan manuver kapal sangat penting. Propeller sebagai sistem pendorong pada kapal, yang akan menghasilkan gaya dorong, akan membutuhkan rudder sebagai alat kemudi pada kapal. Dengan perbedaan sudut operasional pada rudder akan memberikan hasil pola aliran dan distribusi tekanan yang berbeda pada sisi keluaran rudder. Dengan variasi sudut rudder 0⁰ untuk kapal bergerak lurus , sudut 20⁰ dan 45⁰ pada Kuadran I untuk kapal bergerak ke kanan dan pada sudut 20⁰ dan 45⁰ pada kuadran IV untuk kapal bergerak ke kiri. Visualisasi pola aliran direkam menggunakan action cam dan distribusi tekanan total diukur menggunakan inclined tube manometer. Hasil dari penelitian ini menunjukkan bahwa saat kapal akan melakukan manuver ke kanan dan kekiri serta bergerak lurus, akan menghasilkan distribusi tekanan yang berbeda-beda. Hal ini didukung oleh visualisai pola aliran fluida yang dihasilkan dimana semakin besar sudut rudder yang dioperasikan akan semakin ekstrim juga pembelokan aliran yang terjadi pada sisi keluaran rudder karena posisi rudder yang tidak segaris dengan arah aliran. Kata Kunci : Propulsi, Kapal, Propeller, Rudder, Mekanika fluida
Abstract
Ships as a means of sea transportation with good transport efficiency must have a high mobility. Where the ship's manoeuvrability is very important. Propeller as a propulsion system on the ship, which will generate thrust, will require a rudder as a manoeuvre tool on the ship. With different operational angles at the rudder, it will result in different flow patterns and pressure distributions at the rudder output side. With rudder angle variation 0⁰ for ships moving straight, angles 20⁰ and 45⁰ in Quadrant I for ships moving to the right and at angles 20⁰ and 45⁰ in quadrant IV for ships moving to the left. Visualization of the flow pattern was recorded using an action cam and the total pressure distribution was measured using an inclined tube manometer. The results of this study indicate that when the ship will manoeuvre right and left and move straight, it will produce different fluid pressure distributions. This is supported by the visualization of the resulting fluid flow pattern where the greater the angle of the rudder being operated, the more extreme the deflection of the flow that occurs at the output side of the rudder is due to the position of the rudder which is not in line with the direction of flow. Keyword : Propulsion, Ship, Propeller, Rudder, and Fluid Mechanics
1. Pendahuluan
Kapal laut merupakan alat transportasi dengan efisiensi pengangkutan yang tinggi, sehingga kapal harus beroperasi dengan mobilitas yang tinggi. Maka untuk mendukung mobilitas itu harus di perhatikan aspek-aspek pendukung yang menjadi komponen penggerak kapal, salah satu komponen penting adalah sistem propulsi kapal yang merupakan sistem yang berfungsi sebagai pendorong kapal. Terdapat tiga komponen dalam sistem propulsi kapal yaitu: mesin induk, sistem transmisi, dan propulsor. Telah banyak dikaji pengembangan jenis propulsor kapal, dimana saat ini banyak digunakan jenis propulsor mekanik yaitu baling – baling [1].
Hasil kinerja dari baling baling kapal akan menghasilkan kecepatan dinas kapal. Jumlah kecepatan dinas yang dihasilkan kapal merupakan prioritas utama dalam perencanaan sistem propulsi kapal, kinerja sistem propulsi harus mampu menghasilkan kecepatan dinas yang dibutuhkan kapal guna memenuhi total tahanan dan kebutuhan daya
dorong kapal [2]. Namun banyak penelitian menemukan bahwa banyaknya kasus kegagalan baling-baling kapal dalam memberi gaya dorong kapal sesuai dengan yang direncanakan, karena perubahan suatu aliran fluida yang mengalami penurunan tekanan di daerah tertentu. Fenomena ini akan mengakibatkan menurunnya gaya dorong dan efisiensi baling-baling, juga dapat menimbulkan terjadinya erosi pada baling-baling, getaran pada badan kapal (hull vibrtion) dan timbulnya kebisingan (noise) pada buritan kapal bahkan kavitasi [3].
Menurut Komeidi,2007 dalam Sembiring dkk,2016 salah satu upaya meningkatkan kemampuan olah gerak kapal adalah mengoptimalkan kinerja rudder. Berbagai cara telah dilakukan untuk meningkatkan kerja rudder salah satunya yaitu dengan memvariasikan posisi rudder yang tidak segaris dengan poros propeller [4]. Dengan perbedaan posisi operasional rudder akan mempengaruhi hasil distribusi tekanan total pada sisi hisap propeller. Keingintahuan penulis untuk mengetahui distribusi tekanan total pada sisi hisap
Frans H Marpaung et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 17
propeller dan fenomena kavitasi yang terjadi pada sistem propulsi kapal mendorong penulis untuk melakukan penelitian pengaruh sudut operasional rudder terhadap tekanan total fluida pada sisi hisap propeller pada model buritan kapal dengan parameter-parameter yang mempengaruhi dan variasi sudut operasinal rudder pada suatu model buritan kapal.
Dalam hal ini maka ada beberapa permasalahan yang akan dikaji, yaitu: Bagaimana distribusi tekanan total pada permukaan kontrol sisi hisap propeller kapal dengan variasi sudut operasional rudder kapal?
Beberapa batasan ditetapkan dalam penelitian ini meliputi:
1. Rotasi propeller pada model simulasi adalah 2900 rpm.
2. Menggunakan model propeller jenis Fixed pitch propellers dengan 3 jumlah sudu.
3. Model rudder yang digunakan adalah jenis RC Boat FT012-4.
4. Variasi operasional rudder yang ditinjau ada 3, yaitu : 0⁰ untuk kapal bergerak lurus, kuadran I untuk kapal belok kanan pada sudut 45⁰ dan 20⁰ dan kuadran IV untuk kapal belok kiri pada sudut 45⁰ dan 20⁰.
5. Beban arus dan gelombang terkondisikan sama untuk semua operasional yang lakukan.
6. Temperature ruangan dijaga konstan pada suhu 29⁰ dan temperature water tunnel pada saat pengujian 27⁰.
2. Metode Penelitian
Penelitian dilakukan dengan metode eskperimen dan pengujian menggunakan water tunnel dan model buritan kapal dengan variasi sudut operasional rudder pada model buritan kapal. Visualisasi pola aliran fluida yang terjadi di ambil menggunakan camera go-pro dan distribusi tekanan total pada sisi hisap propeller di ukur dengan inclined tube manometer.
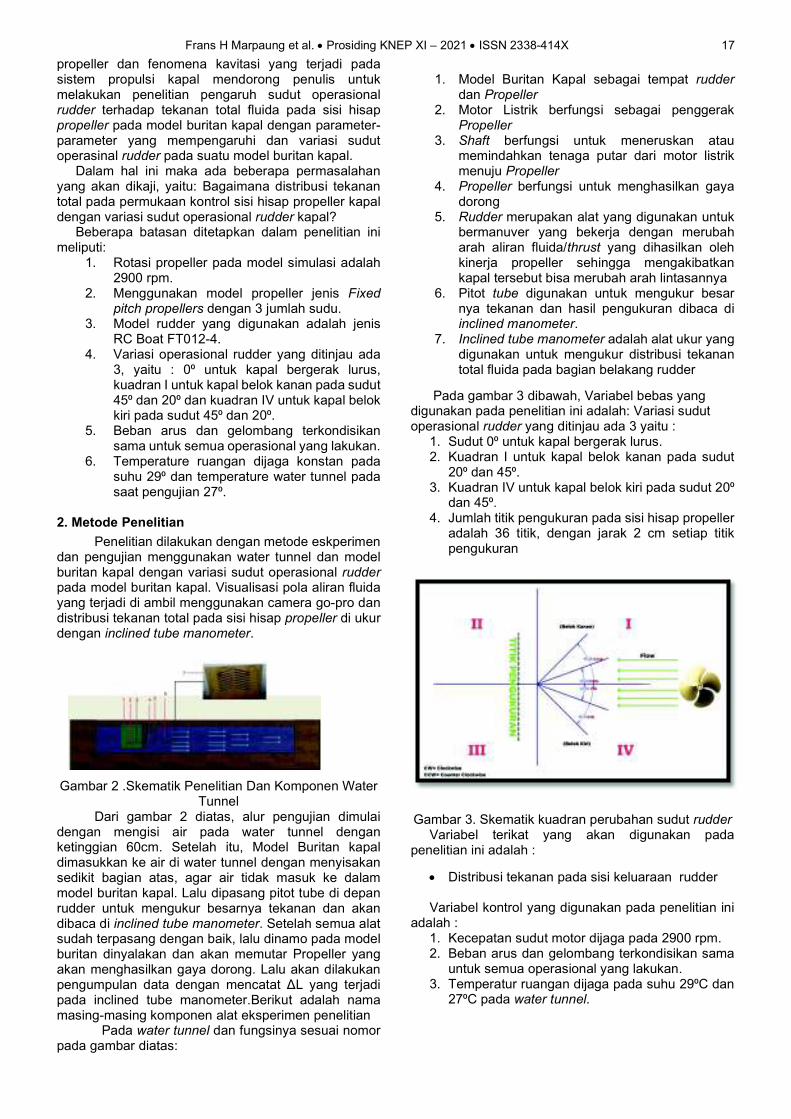
Gambar 2 .Skematik Penelitian Dan Komponen Water Tunnel
Dari gambar 2 diatas, alur pengujian dimulai dengan mengisi air pada water tunnel dengan ketinggian 60cm. Setelah itu, Model Buritan kapal dimasukkan ke air di water tunnel dengan menyisakan sedikit bagian atas, agar air tidak masuk ke dalam model buritan kapal. Lalu dipasang pitot tube di depan rudder untuk mengukur besarnya tekanan dan akan dibaca di inclined tube manometer. Setelah semua alat sudah terpasang dengan baik, lalu dinamo pada model buritan dinyalakan dan akan memutar Propeller yang akan menghasilkan gaya dorong. Lalu akan dilakukan pengumpulan data dengan mencatat ΔL yang terjadi pada inclined tube manometer.Berikut adalah nama masing-masing komponen alat eksperimen penelitian
Pada water tunnel dan fungsinya sesuai nomor pada gambar diatas:
1. Model Buritan Kapal sebagai tempat rudder
dan Propeller 2. Motor Listrik berfungsi sebagai penggerak
Propeller 3. Shaft berfungsi untuk meneruskan atau
memindahkan tenaga putar dari motor listrik menuju Propeller
4. Propeller berfungsi untuk menghasilkan gaya dorong
5. Rudder merupakan alat yang digunakan untuk bermanuver yang bekerja dengan merubah arah aliran fluida/thrust yang dihasilkan oleh kinerja propeller sehingga mengakibatkan kapal tersebut bisa merubah arah lintasannya
6. Pitot tube digunakan untuk mengukur besar nya tekanan dan hasil pengukuran dibaca di inclined manometer.
7. Inclined tube manometer adalah alat ukur yang digunakan untuk mengukur distribusi tekanan total fluida pada bagian belakang rudder
Pada gambar 3 dibawah, Variabel bebas yang digunakan pada penelitian ini adalah: Variasi sudut operasional rudder yang ditinjau ada 3 yaitu :
1. Sudut 0⁰ untuk kapal bergerak lurus. 2. Kuadran I untuk kapal belok kanan pada sudut
20⁰ dan 45⁰. 3. Kuadran IV untuk kapal belok kiri pada sudut 20⁰
dan 45⁰. 4. Jumlah titik pengukuran pada sisi hisap propeller
adalah 36 titik, dengan jarak 2 cm setiap titik pengukuran
Gambar 3. Skematik kuadran perubahan sudut rudder Variabel terikat yang akan digunakan pada
penelitian ini adalah :
· Distribusi tekanan pada sisi keluaraan rudder
Variabel kontrol yang digunakan pada penelitian ini adalah :
1. Kecepatan sudut motor dijaga pada 2900 rpm. 2. Beban arus dan gelombang terkondisikan sama
untuk semua operasional yang lakukan. 3. Temperatur ruangan dijaga pada suhu 29⁰C dan
27⁰C pada water tunnel.
Frans H Marpaung et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 18
3. Hasil dan Pembahasan
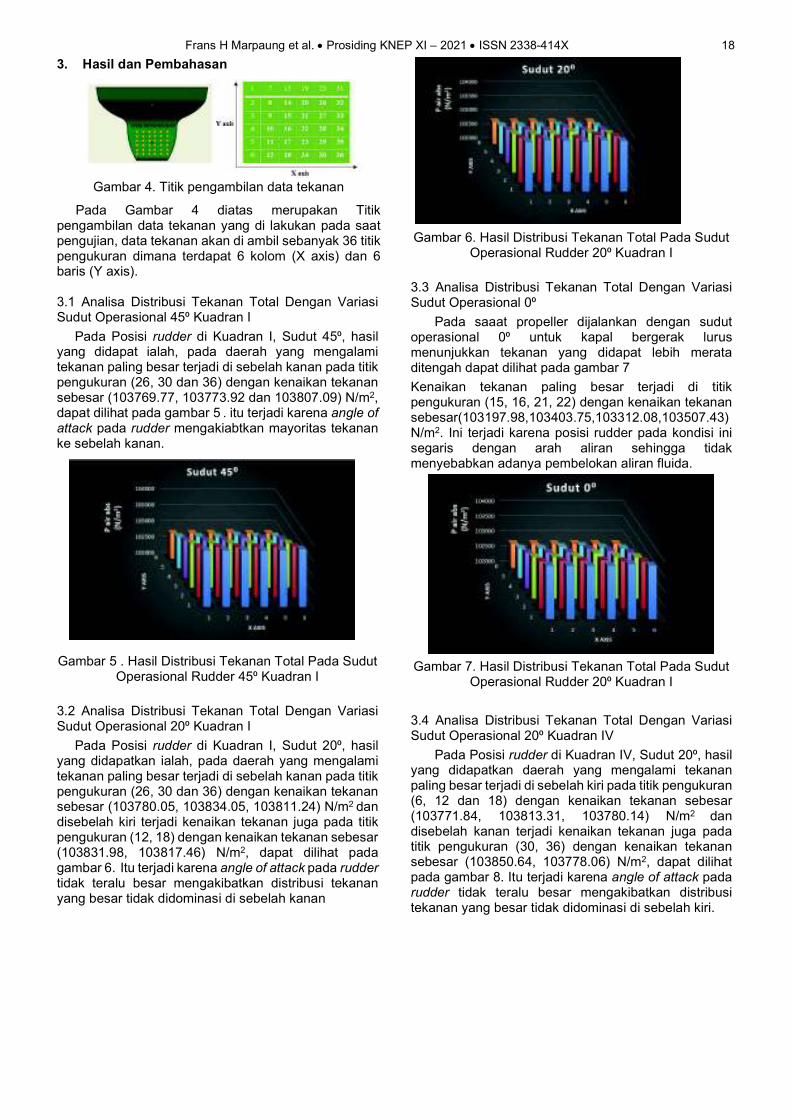
Gambar 4. Titik pengambilan data tekanan
Pada Gambar 4 diatas merupakan Titik pengambilan data tekanan yang di lakukan pada saat pengujian, data tekanan akan di ambil sebanyak 36 titik pengukuran dimana terdapat 6 kolom (X axis) dan 6 baris (Y axis). 3.1 Analisa Distribusi Tekanan Total Dengan Variasi Sudut Operasional 45⁰ Kuadran I
Pada Posisi rudder di Kuadran I, Sudut 45⁰, hasil yang didapat ialah, pada daerah yang mengalami tekanan paling besar terjadi di sebelah kanan pada titik pengukuran (26, 30 dan 36) dengan kenaikan tekanan sebesar (103769.77, 103773.92 dan 103807.09) N/m2, dapat dilihat pada gambar 5 . itu terjadi karena angle of attack pada rudder mengakiabtkan mayoritas tekanan ke sebelah kanan.
Gambar 5 . Hasil Distribusi Tekanan Total Pada Sudut
Operasional Rudder 45⁰ Kuadran I
3.2 Analisa Distribusi Tekanan Total Dengan Variasi Sudut Operasional 20⁰ Kuadran I
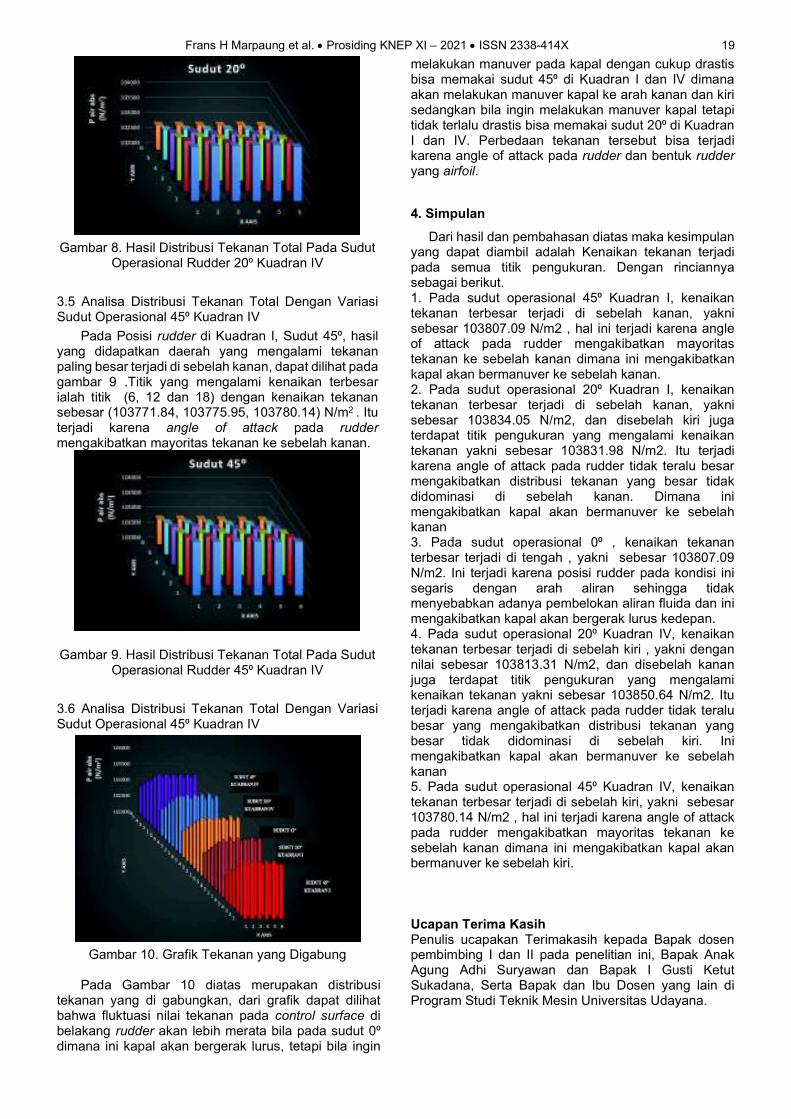
Pada Posisi rudder di Kuadran I, Sudut 20⁰, hasil yang didapatkan ialah, pada daerah yang mengalami tekanan paling besar terjadi di sebelah kanan pada titik pengukuran (26, 30 dan 36) dengan kenaikan tekanan sebesar (103780.05, 103834.05, 103811.24) N/m2 dan disebelah kiri terjadi kenaikan tekanan juga pada titik pengukuran (12, 18) dengan kenaikan tekanan sebesar (103831.98, 103817.46) N/m2, dapat dilihat pada gambar 6. Itu terjadi karena angle of attack pada rudder tidak teralu besar mengakibatkan distribusi tekanan yang besar tidak didominasi di sebelah kanan
Gambar 6. Hasil Distribusi Tekanan Total Pada Sudut Operasional Rudder 20⁰ Kuadran I
3.3 Analisa Distribusi Tekanan Total Dengan Variasi Sudut Operasional 0⁰
Pada saaat propeller dijalankan dengan sudut operasional 0⁰ untuk kapal bergerak lurus menunjukkan tekanan yang didapat lebih merata ditengah dapat dilihat pada gambar 7
Kenaikan tekanan paling besar terjadi di titik pengukuran (15, 16, 21, 22) dengan kenaikan tekanan sebesar(103197.98,103403.75,103312.08,103507.43) N/m2. Ini terjadi karena posisi rudder pada kondisi ini segaris dengan arah aliran sehingga tidak menyebabkan adanya pembelokan aliran fluida.
Gambar 7. Hasil Distribusi Tekanan Total Pada Sudut Operasional Rudder 20⁰ Kuadran I
3.4 Analisa Distribusi Tekanan Total Dengan Variasi Sudut Operasional 20⁰ Kuadran IV
Pada Posisi rudder di Kuadran IV, Sudut 20⁰, hasil yang didapatkan daerah yang mengalami tekanan paling besar terjadi di sebelah kiri pada titik pengukuran (6, 12 dan 18) dengan kenaikan tekanan sebesar (103771.84, 103813.31, 103780.14) N/m2 dan disebelah kanan terjadi kenaikan tekanan juga pada titik pengukuran (30, 36) dengan kenaikan tekanan sebesar (103850.64, 103778.06) N/m2, dapat dilihat pada gambar 8. Itu terjadi karena angle of attack pada rudder tidak teralu besar mengakibatkan distribusi tekanan yang besar tidak didominasi di sebelah kiri.
Frans H Marpaung et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 19
Gambar 8. Hasil Distribusi Tekanan Total Pada Sudut Operasional Rudder 20⁰ Kuadran IV
3.5 Analisa Distribusi Tekanan Total Dengan Variasi Sudut Operasional 45⁰ Kuadran IV
Pada Posisi rudder di Kuadran I, Sudut 45⁰, hasil yang didapatkan daerah yang mengalami tekanan paling besar terjadi di sebelah kanan, dapat dilihat pada gambar 9 .Titik yang mengalami kenaikan terbesar ialah titik (6, 12 dan 18) dengan kenaikan tekanan sebesar (103771.84, 103775.95, 103780.14) N/m2 . Itu terjadi karena angle of attack pada rudder mengakibatkan mayoritas tekanan ke sebelah kanan.
Gambar 9. Hasil Distribusi Tekanan Total Pada Sudut Operasional Rudder 45⁰ Kuadran IV
3.6 Analisa Distribusi Tekanan Total Dengan Variasi Sudut Operasional 45⁰ Kuadran IV
Gambar 10. Grafik Tekanan yang Digabung
Pada Gambar 10 diatas merupakan distribusi tekanan yang di gabungkan, dari grafik dapat dilihat bahwa fluktuasi nilai tekanan pada control surface di belakang rudder akan lebih merata bila pada sudut 0⁰ dimana ini kapal akan bergerak lurus, tetapi bila ingin
melakukan manuver pada kapal dengan cukup drastis bisa memakai sudut 45⁰ di Kuadran I dan IV dimana akan melakukan manuver kapal ke arah kanan dan kiri sedangkan bila ingin melakukan manuver kapal tetapi tidak terlalu drastis bisa memakai sudut 20⁰ di Kuadran I dan IV. Perbedaan tekanan tersebut bisa terjadi karena angle of attack pada rudder dan bentuk rudder yang airfoil.
4. Simpulan
Dari hasil dan pembahasan diatas maka kesimpulan yang dapat diambil adalah Kenaikan tekanan terjadi pada semua titik pengukuran. Dengan rinciannya sebagai berikut. 1. Pada sudut operasional 45⁰ Kuadran I, kenaikan tekanan terbesar terjadi di sebelah kanan, yakni sebesar 103807.09 N/m2 , hal ini terjadi karena angle of attack pada rudder mengakibatkan mayoritas tekanan ke sebelah kanan dimana ini mengakibatkan kapal akan bermanuver ke sebelah kanan. 2. Pada sudut operasional 20⁰ Kuadran I, kenaikan tekanan terbesar terjadi di sebelah kanan, yakni sebesar 103834.05 N/m2, dan disebelah kiri juga terdapat titik pengukuran yang mengalami kenaikan tekanan yakni sebesar 103831.98 N/m2. Itu terjadi karena angle of attack pada rudder tidak teralu besar mengakibatkan distribusi tekanan yang besar tidak didominasi di sebelah kanan. Dimana ini mengakibatkan kapal akan bermanuver ke sebelah kanan 3. Pada sudut operasional 0⁰ , kenaikan tekanan terbesar terjadi di tengah , yakni sebesar 103807.09 N/m2. Ini terjadi karena posisi rudder pada kondisi ini segaris dengan arah aliran sehingga tidak menyebabkan adanya pembelokan aliran fluida dan ini mengakibatkan kapal akan bergerak lurus kedepan. 4. Pada sudut operasional 20⁰ Kuadran IV, kenaikan tekanan terbesar terjadi di sebelah kiri , yakni dengan nilai sebesar 103813.31 N/m2, dan disebelah kanan juga terdapat titik pengukuran yang mengalami kenaikan tekanan yakni sebesar 103850.64 N/m2. Itu terjadi karena angle of attack pada rudder tidak teralu besar yang mengakibatkan distribusi tekanan yang besar tidak didominasi di sebelah kiri. Ini mengakibatkan kapal akan bermanuver ke sebelah kanan 5. Pada sudut operasional 45⁰ Kuadran IV, kenaikan tekanan terbesar terjadi di sebelah kiri, yakni sebesar 103780.14 N/m2 , hal ini terjadi karena angle of attack pada rudder mengakibatkan mayoritas tekanan ke sebelah kanan dimana ini mengakibatkan kapal akan bermanuver ke sebelah kiri. Ucapan Terima Kasih Penulis ucapakan Terimakasih kepada Bapak dosen pembimbing I dan II pada penelitian ini, Bapak Anak Agung Adhi Suryawan dan Bapak I Gusti Ketut Sukadana, Serta Bapak dan Ibu Dosen yang lain di Program Studi Teknik Mesin Universitas Udayana.

Frans H Marpaung et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 20
Daftar Pustaka [1] Tjahjanto, R. and Azis, I., 2016, Analisis
Penyebab Terjadinya Kecelakaan Kerja Di Atas Kapal MV. CS Brave, KAPAL: Jurnal Ilmu Pengetahuan dan Teknologi Kelautan, 13(1), pp.13-18.
[2] Mahaputra, B.A., Zakki, A.F. and Mulyatno, I.P.,
2020, Analisis Pengaruh Konfigurasi Perubahan Sudut Rake Propeller B5-80 Terhadap Fatigue Life pada Kapal Kontainer 3600 TEUs, Jurnal Teknik Perkapalan, 8(3).
[3] Majid, Abdul, 2011, Modifikasi daun Kemudi
Dengan Flap Tunggal Menjadi Flap Ganda Untuk Meningkatkan Maneuverability Kapal, Laporan Tugas Akhir Jurusan Teknik Perkapalan – FTK ITS. Surabaya.
[4] Belalawe, B.J. 2017, Analisis Variasi Posisi
Rudder Terhadap Efektivitas Manuver Kapal, Laporan Tugas Akhir Jurusan Teknik Kelautan – FTK ITS, Surabaya
Frans H Marpaung menyelesaikan studi S1 di Program Studi Teknik Mesin, Universitas Udayana pada tahun 2021. Bidang penelitian yang diminati adalah topik yang berkaitan dengan konversi energi yaitu : di bidang mekanika fluida, aerodinamika dan sistem propulsi kapal.

Prosiding Konferensi Nasional Engineering Perhotelan XI, Universitas Udayana - 2021
ISSN 2338-414X
*Korespondensi: Tel./Fax.: 0853-3780-6737 E-mail: [email protected]
ÓTeknik Mesin Universitas Udayana 2021
Pengaruh Sudut Operasional Rudder Terhadap Distribusi Tekanan Total Fluida Pada Permukaan Kontrol Sisi Hisap Propeller
Model Buritan Kapal Bishop S F Tarigan 1), Anak Agung Adhi Suryawan2), I Gusti Ketut Sukadana3)
1,2,3)Jurusan Teknik Mesin Universitas Udayana, Kampus Bukit Jimbaran Bali
Abstrak Propeller merupakan komponen mekanis yang digunakan sebagai alat penggerak kapal laut. Namun banyak kasus kegagalan propeller dalam memberi gaya dorong. Salah satu upaya meningkatkan kemampuan olah gerak kapal adalah mengoptimalkan kinerja rudder. Dengan perbedaan posisi operasional rudder akan mempengaruhi distribusi tekanan total pada sisi hisap propeller. Penelitian ini bertujuan untuk menganalisis pengaruh dari sudut operasional rudder terhadap distribusi tekanan total pada sisi hisap propeller. Dengan variasi sudut rudder 0⁰ untuk kapal bergerak lurus, sudut 20⁰ dan 45⁰ pada kuadran I untuk kapal bergerak ke kanan dan sudut 20⁰ dan 45⁰ pada kuadran IV untuk kapal bergerak ke kiri. Distribusi tekanan total di ukur menggunakan inclined manometer. Hasil dari penelitian ini menunjukkan penurunan tekanan terjadi pada semua titik pengukuran setiap variasi sudut operasional rudder yang di uji, dimana penurunan tekanan paling besar pada sudut operasional 0° sebesar 8.29 N/m2, pada sudut operasional 20° pada kuadran I sebesar 10.37 N/m2, dan pada sudut operasional 45° pada kuadran I sebesar 20.74 N/m2, pada sudut operasional 20° kuadran IV sebesar 14.52 N/m2, serta pada sudut operasional 45° kuadran IV sebesar 18.66 N/m2. Besar sudut operasional rudder yang di variasikan maka akan semakin besar penurunan tekanan yang terjadi. Didukung oleh visualisasi pola aliran fluida yang dihasilkan dimana semakin besar sudut rudder yang dioperasikan akan semakin ekstrim juga pembelokan aliran yang terjadi karena posisi rudder yang tidak segaris dengan arah aliran.
Kata Kunci: Propeller, Rudder, Pola Aliran, Distribusi Tekanan Total, Dan kapal laut
Abstract
Propeller is a mechanical component that is used as a means of propulsion for ships. However, there are many cases of propeller failure in providing thrust. One of the efforts to improve the ship's maneuverability is to optimize the performance of the rudder. By operating the steering will affect the total pressure distribution on the side of the propeller. This study aims to analyze the effect of the steering on the total pressure distribution on the side of the propeller. With variations in the steering angle 0⁰ for ships moving straight, angles 20⁰ and 45⁰ in quadrant I for ships moving to the right and angles 20⁰ and 45⁰ in quadrant IV for ships moving to the left. The total pressure distribution was measured using an inclined manometer. The results of this study indicate that the pressure drop occurs at all measurement points for each variation of the operating angle of the steering wheel tested, where the pressure drop at the operating angle of 0 ° is 8.29 N / m2, at the operational angle of 20 ° in quadrant I is 10.37 N. / m2, and at an operational angle of 45 ° in quadrant I is 20.74 N / m2, at an operational angle of 20 ° quadrant IV is 14.52 N / m2, and at an operational angle of 45 ° quadrant IV is 18.66 N / m2 . The operating angle of the steering is varied, the greater the pressure drop that occurs. Supported by the visualization of the resulting fluid flow pattern so that the greater the steering angle that is operated, the more extreme the flow deflection occurs because the steering position is not in line with the direction of the flow. Keywords: Propeller, Rudder, Flow Pattern, Total Pressure Distribution, and ships
1. Pendahuluan
Kapal laut merupakan alat transportasi dengan efisiensi pengangkutan yang tinggi, sehingga kapal harus beroperasi dengan mobilitas yang tinggi. Maka untuk mendukung mobilitas itu harus di perhatikan aspek-aspek pendukung yang menjadi komponen penggerak kapal, salah satu komponen penting adalah sistem propulsi kapal yang merupakan sistem yang berfungsi sebagai pendorong kapal. Terdapat tiga komponen dalam sistem propulsi kapal yaitu mesin induk, sistem transmisi, dan propulsor. Telah banyak dikaji pengembangan jenis propulsor kapal, dimana saat ini banyak digunakan jenis propulsor mekanik yaitu baling – baling [1].
Hasil kinerja dari baling baling kapal akan menghasilkan kecepatan dinas kapal. Jumlah kecepatan dinas yang dihasilkan kapal merupakan prioritas utama dalam perencanaan sistem propulsi kapal, kinerja sistem propulsi harus mampu menghasilkan kecepatan dinas yang dibutuhkan kapal guna memenuhi total tahanan dan kebutuhan daya dorong kapal [2]. Namun banyak penelitian menemukan bahwa banyaknya kasus kegagalan baling-baling kapal dalam memberi gaya dorong kapal sesuai dengan yang direncanakan, karena perubahan suatu aliran fluida yang mengalami penurunan tekanan di daerah tertentu. Fenomena ini akan mengakibatkan menurunnya gaya dorong dan efisiensi baling-baling, juga dapat menimbulkan terjadinya erosi pada baling-

Bishop S F Tarigan et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 22
baling, getaran pada badan kapal (hull vibrtion) dan timbulnya kebisingan (noise) pada buritan kapal bahkan kavitasi [3].
Menurut Komeidi,2007 dalam Sembiring dkk,2016 salah satu upaya meningkatkan kemampuan olah gerak kapal adalah mengoptimalkan kinerja rudder. Berbagai cara telah dilakukan untuk meningkatkan kerja rudder salah satunya yaitu dengan memvariasikan posisi rudder yang tidak segaris dengan poros propeller [4]. Dengan perbedaan posisi operasional rudder akan mempengaruhi hasil distribusi tekanan total pada sisi hisap propeller. Keingintahuan penulis untuk mengetahui distribusi tekanan total pada sisi hisap propeller dan fenomena kavitasi yang terjadi pada sistem propulsi kapal mendorong penulis untuk melakukan penelitian pengaruh sudut operasional rudder terhadap tekanan total fluida pada sisi hisap propeller pada model buritan kapal dengan parameter-parameter yang mempengaruhi dan variasi sudut operasinal rudder pada suatu model buritan kapal.
Dalam hal ini maka ada beberapa permasalahan yang akan dikaji, yaitu: Bagaimana distribusi tekanan total pada permukaan kontrol sisi hisap propeller kapal dengan variasi sudut operasional rudder kapal?
Beberapa batasan ditetapkan dalam penelitian ini meliputi:
1. Rotasi propeller pada model simulasi adalah 2900 rpm.
2. Menggunakan model propeller jenis Fixed pitch propellers dengan 3 jumlah sudu.
3. Model rudder yang digunakan adalah jenis RC Boat FT012-4.
4. Variasi operasional rudder yang ditinjau ada 3, yaitu : 0⁰ untuk kapal bergerak lurus, kuadran I untuk kapal belok kanan pada sudut 45⁰ dan 20⁰ dan kuadran IV untuk kapal belok kiri pada sudut 45⁰ dan 20⁰.
5. Beban arus dan gelombang terkondisikan sama untuk semua operasional yang lakukan.
6. Temperature ruangan dijaga konstan pada suhu 29⁰ dan temperature water tunnel pada saat pengujian 27⁰.
2. Metode Penelitian
2.1. Inclined tube manometer
Inclined manometer dapat di gunakan untuk mengukur perbedaan tekanan yang kecil dengan akurat [5].
Gambar 1. Inclined Tube Manometer
Untuk mendapatkan nilai tekanan fluida pada inclined manometer, dapat digunakan persamaan sebagai berikut:
P = ρa . g . Sgm . Hm (1)
P = Tekanan yang diukur (N/m2). Hm = Lsinθ (m), θ = 15⁰. ρa = Densitas udara (kg/m3). Sgm = Specific gravity kerosene. g = Percepatan gravitasi (m/s2).
Cara kerja inclined tube manometer adalah: fluida udara mengalir pada titik A akan menekan fluida cair pada inclined tube, akibatnya fluida akan bergerak sepanjang L dan mendapat tekanan atmospir dengan arah berlawanan dengan fluida udara pada titik A, pergerakan tersebut adalah perbedaan ketinggian cairan pada inclined tube, perbedaan ketinggian tersebut di hitung dengan persamaan h = Lsinθ.
Penelitian dilakukan dengan metode eksperimen dan pengujian menggunakan water tunnel dan model buritan kapal dengan variasi sudut operasional rudder pada model buritan kapal. Distribusi tekanan pada sisi hisap propeller diukur dengan inclined tube manometer.
Data diambil saat penelitian adalah : kecepatan sudut motor, temperatur ruangan, temperatur water tunnel, data perpindahan jarak cairan (ΔL) pada inclined tube manometer. Data yang diperoleh dari hasil pengolahan data adalah: tekanan hidrostatis absolut, tekanan hidrodinamis absolut pada water tunnel saat pengujian.
Gambar 2.Skematik Penelitian Dan Komponen Water
Tunnel Dari gambar diatas skematik pengujian akan di
mulai dengan pengisian fluida air ke water tunnel oleh sumber air (keran air), kemudian setelah water tunnel terisi hingga Panjang sarat model buritan kapal (draught), motor pada model buritan kapal dioperasikan dan di lakukan pengujian pengukuran ditribusi tekanan pada sisi hisap propeller. Pengujian tersebut berjalan hingga proses pengambilan data dengan semua variasi sudut operasional rudder selesai.
Berikut adalah nama masing-masing komponen alat eksperimen penelitian Pada water tunnel dan fungsinya sesuai nomor pada gambar diatas:
1. Motor berfungsi sebagai penggerak propeller.
2. Model buritan kapal sebagai tempat rudder dan propeller.
3. Propeller merupakan komponen yang berfungsi untuk menghasilkan gaya dorong.
4. Shaft rudder sebagai penyangga rudder. 5. Rudder sebagai alat kemudi pada model
buritan kapal. 6. Water tunnel untuk menguji perilaku
hidrodinamik dari benda-benda yang terendam dalam air yang mengalir.
7. Pitot tube digunakan untuk mengukur besar nya tekanan dan hasil pengukuran di baca di inclined manometer.
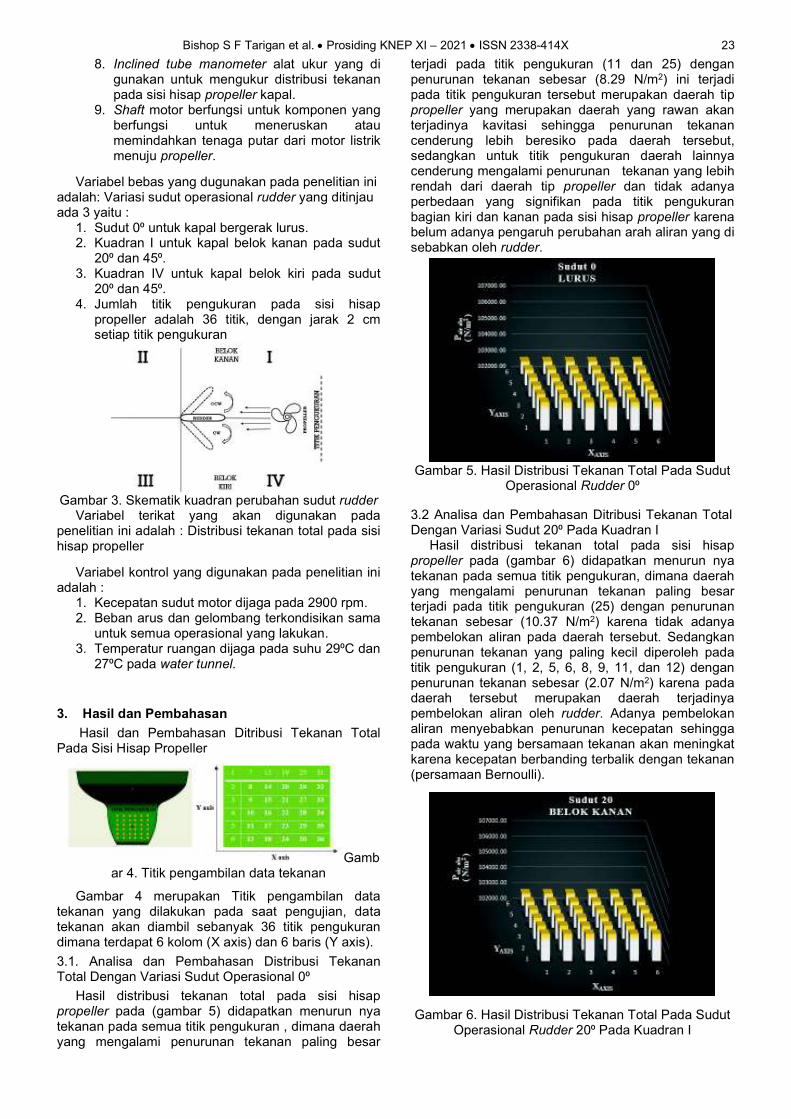
Bishop S F Tarigan et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 23
8. Inclined tube manometer alat ukur yang di gunakan untuk mengukur distribusi tekanan pada sisi hisap propeller kapal.
9. Shaft motor berfungsi untuk komponen yang berfungsi untuk meneruskan atau memindahkan tenaga putar dari motor listrik menuju propeller.
Variabel bebas yang dugunakan pada penelitian ini adalah: Variasi sudut operasional rudder yang ditinjau ada 3 yaitu :
1. Sudut 0⁰ untuk kapal bergerak lurus. 2. Kuadran I untuk kapal belok kanan pada sudut
20⁰ dan 45⁰. 3. Kuadran IV untuk kapal belok kiri pada sudut
20⁰ dan 45⁰. 4. Jumlah titik pengukuran pada sisi hisap
propeller adalah 36 titik, dengan jarak 2 cm setiap titik pengukuran
Gambar 3. Skematik kuadran perubahan sudut rudder
Variabel terikat yang akan digunakan pada penelitian ini adalah : Distribusi tekanan total pada sisi hisap propeller
Variabel kontrol yang digunakan pada penelitian ini adalah :
1. Kecepatan sudut motor dijaga pada 2900 rpm. 2. Beban arus dan gelombang terkondisikan sama
untuk semua operasional yang lakukan. 3. Temperatur ruangan dijaga pada suhu 29⁰C dan
27⁰C pada water tunnel.
3. Hasil dan Pembahasan
Hasil dan Pembahasan Ditribusi Tekanan Total Pada Sisi Hisap Propeller
Gambar 4. Titik pengambilan data tekanan
Gambar 4 merupakan Titik pengambilan data tekanan yang dilakukan pada saat pengujian, data tekanan akan diambil sebanyak 36 titik pengukuran dimana terdapat 6 kolom (X axis) dan 6 baris (Y axis).
3.1. Analisa dan Pembahasan Distribusi Tekanan Total Dengan Variasi Sudut Operasional 0⁰
Hasil distribusi tekanan total pada sisi hisap propeller pada (gambar 5) didapatkan menurun nya tekanan pada semua titik pengukuran , dimana daerah yang mengalami penurunan tekanan paling besar
terjadi pada titik pengukuran (11 dan 25) dengan penurunan tekanan sebesar (8.29 N/m2) ini terjadi pada titik pengukuran tersebut merupakan daerah tip propeller yang merupakan daerah yang rawan akan terjadinya kavitasi sehingga penurunan tekanan cenderung lebih beresiko pada daerah tersebut, sedangkan untuk titik pengukuran daerah lainnya cenderung mengalami penurunan tekanan yang lebih rendah dari daerah tip propeller dan tidak adanya perbedaan yang signifikan pada titik pengukuran bagian kiri dan kanan pada sisi hisap propeller karena belum adanya pengaruh perubahan arah aliran yang di sebabkan oleh rudder.
Gambar 5. Hasil Distribusi Tekanan Total Pada Sudut
Operasional Rudder 0⁰
3.2 Analisa dan Pembahasan Ditribusi Tekanan Total Dengan Variasi Sudut 20⁰ Pada Kuadran I
Hasil distribusi tekanan total pada sisi hisap propeller pada (gambar 6) didapatkan menurun nya tekanan pada semua titik pengukuran, dimana daerah yang mengalami penurunan tekanan paling besar terjadi pada titik pengukuran (25) dengan penurunan tekanan sebesar (10.37 N/m2) karena tidak adanya pembelokan aliran pada daerah tersebut. Sedangkan penurunan tekanan yang paling kecil diperoleh pada titik pengukuran (1, 2, 5, 6, 8, 9, 11, dan 12) dengan penurunan tekanan sebesar (2.07 N/m2) karena pada daerah tersebut merupakan daerah terjadinya pembelokan aliran oleh rudder. Adanya pembelokan aliran menyebabkan penurunan kecepatan sehingga pada waktu yang bersamaan tekanan akan meningkat karena kecepatan berbanding terbalik dengan tekanan (persamaan Bernoulli).
Gambar 6. Hasil Distribusi Tekanan Total Pada Sudut Operasional Rudder 20⁰ Pada Kuadran I

Bishop S F Tarigan et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 24
3.3 Analisa dan Pembahasan Ditribusi Tekanan Total Dengan Variasi Sudut 45⁰ Pada Kuadran I
Hasil distribusi tekanan total pada sisi hisap propeller pada (gambar 7) didapatkan menurun nya tekanan pada semua titik pengukuran, dimana daerah yang mengalami penurunan tekanan paling besar terjadi pada titik pengukuran (22 dan 24) dengan sebesar (20.74 N/m2) karena tidak adanya pembelokan aliran pada daerah tersebut. Sedangkan untuk nilai penurunan tekanan yang paling kecil diperoleh pada titik pengukuran (6) dengan penurunan tekanan sebesar (2.07 N/m2) ini terjadi karena pada daerah tersebut merupakan daerah terjadinya pembelokan aliran oleh rudder. Adanya pembelokan aliran akan menyebabkan penurunan kecepatan sehingga pada waktu yang bersamaan tekanan akan meningkat karena kecepatan berbanding terbalik dengan tekanan (persamaan Bernoulli).
Gambar 7. Hasil Distribusi Tekanan Total Pada Sudut Operasional Rudder 45⁰ Kuadran I
3.4 Analisa dan Pembahsan Distribusi Tekanan Total Dengan Variasi Sudut Operasional 20⁰ Kuadran IV
Hasil distribusi tekanan total sisi hisap propeller pada (gambar 8) didapatkan menurun nya tekanan pada semua titik pengukuran, dimana daerah yang mengalami penurunan tekanan paling besar terjadi pada titik pengukuran (10) sebesar (14.52 N/m2) karena tidak adanya pembelokan aliran pada daerah tersebut. Sedangkan untuk penurunan tekanan yang paling kecil diperoleh pada titik (25, 26, 27, 28, dan 29) dengan penurunan tekanan sebesar (2.07 N/m2) karena pada daerah tersebut merupakan daerah terjadinya pembelokan aliran oleh rudder. Adanya pembelokan aliran menyebabkan penurunan kecepatan sehingga pada waktu yang bersamaan tekanan akan meningkat karena kecepatan berbanding terbalik dengan tekanan (persamaan Bernoulli).
Gambar 8. Hasil Distribusi Tekanan Total Pada Sudut Operasional Rudder 20⁰ Kuadran IV
3.5 Analisa dan Pembahsan Distribusi Tekanan Total Dengan Variasi Sudut Operasional 45⁰ Kuadran IV
Hasil distribusi tekanan totalnsisi hisap propeller pada (gambar 9) didapatkan menurun nya tekanan pada semua titik pengukuran ,dimana daerah yang mengalami penurunan tekanan paling besar terjadi pada titik pengukuran (10) dengan sebesar (18.66 N/m2) karena tidak adanya pembelokan aliran pada daerah tersebut. Sedangkan untuk nilai penurunan tekanan yang paling kecil diperoleh pada titik pengukuran (25, 26, dan 27) dengan penurunan tekanan sebesar (2.07 N/m2) ini terjadi karena pada daerah tersebut merupakan daerah terjadinya pembelokan aliran oleh rudder. Dapat diamati juga dari hasil distribusi tekanan, apabila di bandingkan dengan sudut operasional 45⁰ pada kuadran I, menunjukkan daerah penurunan tekanan yang berbeda karena perbedaan posisi rudder dalam bermanuver, karena adanya pembelokan aliran maka akan menyebabkan penurunan kecepatan sehingga pada waktu yang bersamaan tekanan akan meningkat karena kecepatan berbanding terbalik dengan tekanan (persamaan Bernoulli).
Gambar 9. Hasil Distribusi Tekanan Total Pada Sudut Operasional Rudder 45⁰ Kuadran IV
3.6 Analisa dan Pembahsan Distribusi Tekanan Total Yang Digabungkan
Analisa grafik gabungan tekanan total pada sisi hisap propeller kapal menunjukkan penurunan nilai tekanan cenderung lebih besar pada saat kapal bermanuver dengan sudut operasional rudder 45⁰ pada kuadran I dan IV dari pada sudut operasinal 20⁰ dan 0⁰. Hal ini disebabkan pada kondisi sudut operasional tersebut aliran dibelokkan rudder pada
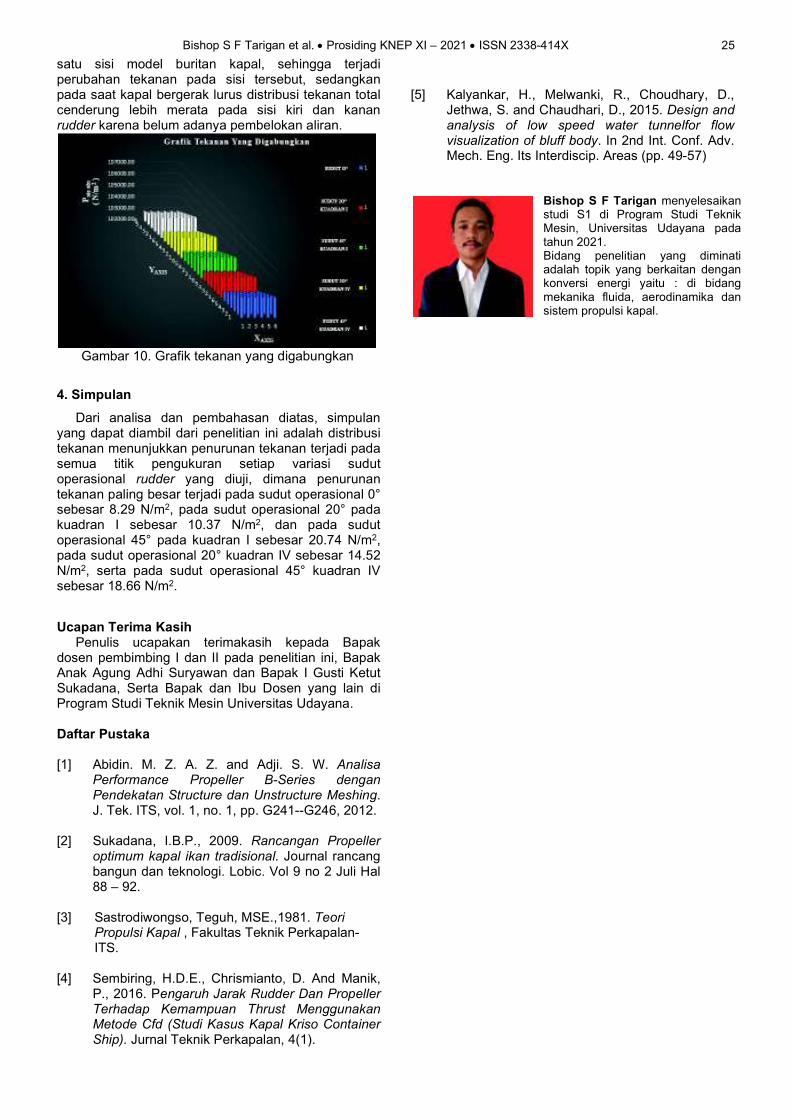
Bishop S F Tarigan et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 25
satu sisi model buritan kapal, sehingga terjadi perubahan tekanan pada sisi tersebut, sedangkan pada saat kapal bergerak lurus distribusi tekanan total cenderung lebih merata pada sisi kiri dan kanan rudder karena belum adanya pembelokan aliran.
Gambar 10. Grafik tekanan yang digabungkan
4. Simpulan
Dari analisa dan pembahasan diatas, simpulan yang dapat diambil dari penelitian ini adalah distribusi tekanan menunjukkan penurunan tekanan terjadi pada semua titik pengukuran setiap variasi sudut operasional rudder yang diuji, dimana penurunan tekanan paling besar terjadi pada sudut operasional 0° sebesar 8.29 N/m2, pada sudut operasional 20° pada kuadran I sebesar 10.37 N/m2, dan pada sudut operasional 45° pada kuadran I sebesar 20.74 N/m2, pada sudut operasional 20° kuadran IV sebesar 14.52 N/m2, serta pada sudut operasional 45° kuadran IV sebesar 18.66 N/m2.
Ucapan Terima Kasih
Penulis ucapakan terimakasih kepada Bapak dosen pembimbing I dan II pada penelitian ini, Bapak Anak Agung Adhi Suryawan dan Bapak I Gusti Ketut Sukadana, Serta Bapak dan Ibu Dosen yang lain di Program Studi Teknik Mesin Universitas Udayana. Daftar Pustaka [1] Abidin. M. Z. A. Z. and Adji. S. W. Analisa
Performance Propeller B-Series dengan Pendekatan Structure dan Unstructure Meshing. J. Tek. ITS, vol. 1, no. 1, pp. G241--G246, 2012.
[2] Sukadana, I.B.P., 2009. Rancangan Propeller
optimum kapal ikan tradisional. Journal rancang bangun dan teknologi. Lobic. Vol 9 no 2 Juli Hal 88 – 92.
[3] Sastrodiwongso, Teguh, MSE.,1981. Teori
Propulsi Kapal , Fakultas Teknik Perkapalan-ITS.
[4] Sembiring, H.D.E., Chrismianto, D. And Manik,
P., 2016. Pengaruh Jarak Rudder Dan Propeller Terhadap Kemampuan Thrust Menggunakan Metode Cfd (Studi Kasus Kapal Kriso Container Ship). Jurnal Teknik Perkapalan, 4(1).
[5] Kalyankar, H., Melwanki, R., Choudhary, D.,
Jethwa, S. and Chaudhari, D., 2015. Design and analysis of low speed water tunnelfor flow visualization of bluff body. In 2nd Int. Conf. Adv. Mech. Eng. Its Interdiscip. Areas (pp. 49-57)
Bishop S F Tarigan menyelesaikan studi S1 di Program Studi Teknik Mesin, Universitas Udayana pada tahun 2021. Bidang penelitian yang diminati adalah topik yang berkaitan dengan konversi energi yaitu : di bidang mekanika fluida, aerodinamika dan sistem propulsi kapal.

Prosiding Konferensi Nasional Engineering Perhotelan XI, Universitas Udayana - 2021
ISSN 2338-414X
*Korespondensi: Tel./Fax.: 081933119796 E-mail: [email protected]
ÓTeknik Mesin Universitas Udayana 2021
Analisa Pengaruh Penambahan Extended Surface Pada Pre-Cooling Kondensor Berbasis CFD
I Gede Putu Adipratama1)*, I Gusti Bagus Wijaya Kusuma2), I Made Widiyarta3), I Nyoman Agus Adi Saputra4)
1,2,3,4) Program Magister Teknik Mesin Universitas Udayana, Kampus Bukit Jimbaran Bali
Abstrak
Pre-cooling adalah proses pendinginan awal, sebelum pendinginan sesungguhnya menggunakan kondensor. Pendinginan awal ini menggunakan sebuah pipa ganda yang berfungsi sebagai penukar kalor antara fluida panas dan dingin yang dipisahkan oleh dinding pipa dalam. Fluida, yang mengalir secara berlawanan arah (counter flow), terdapat dalam pipa ganda tersebut. Dalam sistem refrigerasi, efek pendinginan yang dihasilkan tergantung dari efektivitas kinerja kondensor yang akan menurun seiring dengan terjadinya fouling factor [1]. Pipa ganda, untuk pre-cooling, diletakan sebelum kondensor sehingga fluida refrigeran akan didinginkan terlebih dahulu sebelum memasuki inlet kondensor. Pre-cooling ini akan membantu proses penyerapan panas dari refrigeran pada kondensor. Akan tetapi, kondisi aliran fluida yang terjadi serta fenomenanya tidak bisa diprediksi secara akurat. Oleh karena itu diperlukan sebuah penelitian yang dapat memberikan informasi untuk meningkatkan kinerja alat penukar kalor. Metoda yang digunakan pada penelitian ini adalah CFD (Computational Fluid Dynamics), dengan dan tanpa menggunakan extended surface. Penelitian ini dimaksudkan untuk menganalisa pengaruh ekstended surface pada pre-cooling kondensor dengan memvariasikan jumlah sirip yang digunakan yaitu sebanyak 0, 2, 4, dan 6 buah sirip. Data pengujian yang diperoleh adalah temperatur input dan output aliran fluida refrigeran R-134a dan aliran fluida pendingin air. Penelitian ini menemukan efisiensi sebesar 0.49, 0.49, 0.50, 0.51 untuk perlakuan tanpa extended surface, penambahan ektended surface 2, penambahan extended surface 4 dan penambahan extended surface 6. Nilai LMTD yang didapat ditemukan mengalami penurunan pada penambahan extended surface yaitu: 18.17 ºC, 17.36 ºC, 16.82 ºC,16.06 ºC untuk perlakuan tanpa menggunakan extended surface, penambahan extended surface sebanyak 2 buah, penambahan extended surface sebanyak 4 buah dan penambahan extended surface sebanyak 6 buah. Hal ini menunjukan bahwa pelepasan panas (heat losses) semakin kecil terbuang sehingga penyerapan panas pada sisi air semakin meningkat.
Kata kunci: pre-cooling, kondensor, ekstended surface, CFD, LMTD, efisiensi
Abstract
Pre-cooling is the initial cooling process before the actual cooling using a condenser. This initial cooling uses a double pipe that functions as a heat exchanger between hot and cold fluids separated by the inner pipe wall. The fluid, which flows in the opposite direction (counter-flow), is contained in the double pipe. In the refrigeration system, the resulting cooling effect depends on the effectiveness of the condenser performance which will decrease along with the fouling factor [1]. The double pipe, for pre-cooling, is placed before the condenser so that the refrigerant fluid will be cooled before entering the condenser inlet. This pre-cooling will help the process of absorbing heat from the refrigerant in the condenser. However, the fluid flow conditions that occur and their phenomena cannot be predicted accurately. Therefore, a study is required to provide information for the performance improvement of the heat exchanger. The method used in this study is CFD, with and without the use of an extended surface. This study was intended to analyze the effect of the extended surface on the pre-cooling condenser by varying the number of fins used, namely 0, 2, 4, and 6 fins. Data collected from this experiment are the input and output temperatures of the R-134a refrigerant fluid flow and the water-cooling fluid flow. This study found the efficiency of 0.49, 0.49, 0.50, 0.51 for the treatment without the extended surface, the addition of the extended surface 2, the addition of the extended surface 4 and the addition of the extended surface 6. The LMTD value obtained was found decreased with the addition of the extended surface, namely: 18.17ºC, 17.36 ºC, 16.82 ºC, 16.06 ºC for treatment without using the extended surface, the addition of 2 extended surfaces, the addition of 4 extended surfaces and the addition of 6 extended surfaces. This indicates that the heat loss is decreased, so that the heat absorption on the waterside is increasing. Keywords: pre-cooling, condenser, ekstended surface, CFD, LMTD, efficiency
1. Pendahuluan
Pre-cooling adalah sebuah pipa ganda yang
berfungsi sebagai penukar kalor antara fluida panas dan dingin yang dipisahkan oleh dinding pipa dalam. Fluida yang mengalir secara berlawanan arah (counter flow). Efek pendinginan yang dihasilkan dalam system refrigerasi tergantung dari efektivitas kinerja kondensor. Sementara, kinerja kondensor semakin lama akan menurun seiring dengan terjadinya fouling factor [1].
Alat ini diletakan sebelum kondensor dimana fluida refrigeran akan didinginkan terlebih dahulu sebelum memasuki inlet kondensor guna membantu proses penyerapan panas dari refrigerant.
Alat pre cooling yang didesain pada intinya adalah alat penukar panas, oleh sebab itu maka salah satu metode untuk meningkatkan performance alat penukar panas adalah dengan menambahkan extended surfaces di sisi pipa refrigeran. Hal ini mengacu pada beberapa penelitian dimana penambahan extended
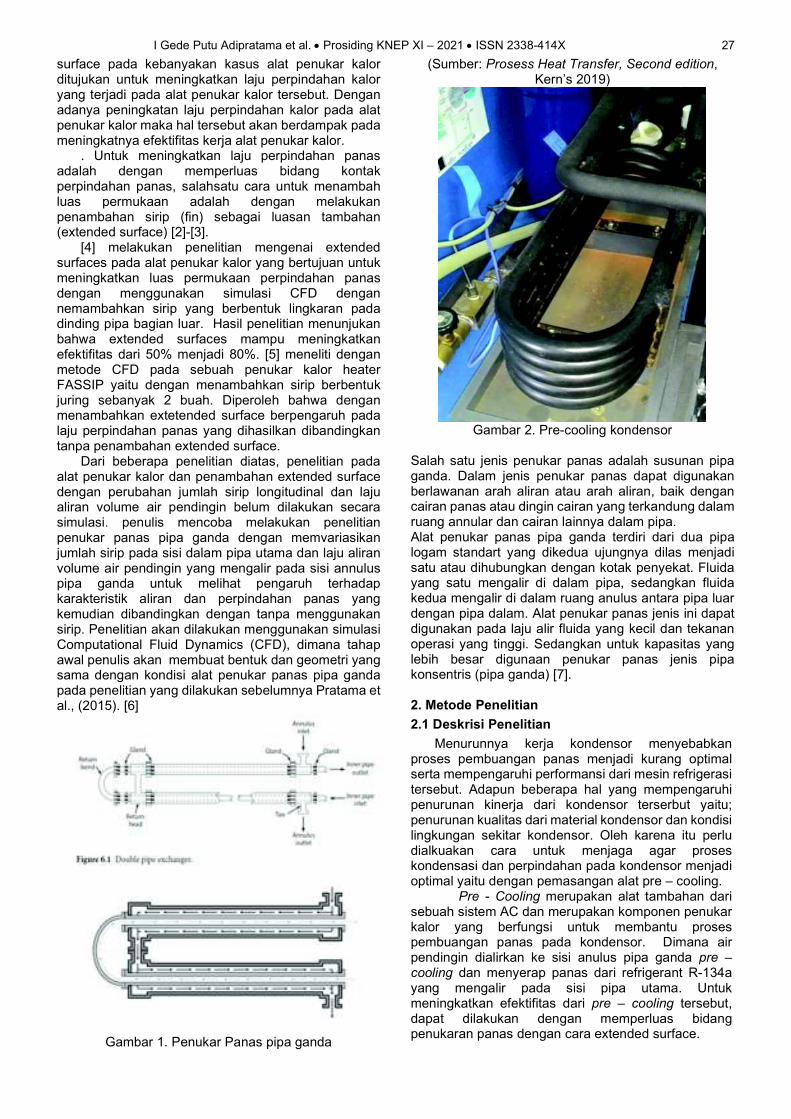
I Gede Putu Adipratama et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 27
surface pada kebanyakan kasus alat penukar kalor ditujukan untuk meningkatkan laju perpindahan kalor yang terjadi pada alat penukar kalor tersebut. Dengan adanya peningkatan laju perpindahan kalor pada alat penukar kalor maka hal tersebut akan berdampak pada meningkatnya efektifitas kerja alat penukar kalor.
. Untuk meningkatkan laju perpindahan panas adalah dengan memperluas bidang kontak perpindahan panas, salahsatu cara untuk menambah luas permukaan adalah dengan melakukan penambahan sirip (fin) sebagai luasan tambahan (extended surface) [2]-[3].
[4] melakukan penelitian mengenai extended surfaces pada alat penukar kalor yang bertujuan untuk meningkatkan luas permukaan perpindahan panas dengan menggunakan simulasi CFD dengan nemambahkan sirip yang berbentuk lingkaran pada dinding pipa bagian luar. Hasil penelitian menunjukan bahwa extended surfaces mampu meningkatkan efektifitas dari 50% menjadi 80%. [5] meneliti dengan metode CFD pada sebuah penukar kalor heater FASSIP yaitu dengan menambahkan sirip berbentuk juring sebanyak 2 buah. Diperoleh bahwa dengan menambahkan extetended surface berpengaruh pada laju perpindahan panas yang dihasilkan dibandingkan tanpa penambahan extended surface.
Dari beberapa penelitian diatas, penelitian pada alat penukar kalor dan penambahan extended surface dengan perubahan jumlah sirip longitudinal dan laju aliran volume air pendingin belum dilakukan secara simulasi. penulis mencoba melakukan penelitian penukar panas pipa ganda dengan memvariasikan jumlah sirip pada sisi dalam pipa utama dan laju aliran volume air pendingin yang mengalir pada sisi annulus pipa ganda untuk melihat pengaruh terhadap karakteristik aliran dan perpindahan panas yang kemudian dibandingkan dengan tanpa menggunakan sirip. Penelitian akan dilakukan menggunakan simulasi Computational Fluid Dynamics (CFD), dimana tahap awal penulis akan membuat bentuk dan geometri yang sama dengan kondisi alat penukar panas pipa ganda pada penelitian yang dilakukan sebelumnya Pratama et al., (2015). [6]
Gambar 1. Penukar Panas pipa ganda
(Sumber: Prosess Heat Transfer, Second edition, Kern’s 2019)
Gambar 2. Pre-cooling kondensor
Salah satu jenis penukar panas adalah susunan pipa ganda. Dalam jenis penukar panas dapat digunakan berlawanan arah aliran atau arah aliran, baik dengan cairan panas atau dingin cairan yang terkandung dalam ruang annular dan cairan lainnya dalam pipa. Alat penukar panas pipa ganda terdiri dari dua pipa logam standart yang dikedua ujungnya dilas menjadi satu atau dihubungkan dengan kotak penyekat. Fluida yang satu mengalir di dalam pipa, sedangkan fluida kedua mengalir di dalam ruang anulus antara pipa luar dengan pipa dalam. Alat penukar panas jenis ini dapat digunakan pada laju alir fluida yang kecil dan tekanan operasi yang tinggi. Sedangkan untuk kapasitas yang lebih besar digunaan penukar panas jenis pipa konsentris (pipa ganda) [7]. 2. Metode Penelitian
2.1 Deskrisi Penelitian
Menurunnya kerja kondensor menyebabkan proses pembuangan panas menjadi kurang optimal serta mempengaruhi performansi dari mesin refrigerasi tersebut. Adapun beberapa hal yang mempengaruhi penurunan kinerja dari kondensor terserbut yaitu; penurunan kualitas dari material kondensor dan kondisi lingkungan sekitar kondensor. Oleh karena itu perlu dialkuakan cara untuk menjaga agar proses kondensasi dan perpindahan pada kondensor menjadi optimal yaitu dengan pemasangan alat pre – cooling.
Pre - Cooling merupakan alat tambahan dari sebuah sistem AC dan merupakan komponen penukar kalor yang berfungsi untuk membantu proses pembuangan panas pada kondensor. Dimana air pendingin dialirkan ke sisi anulus pipa ganda pre – cooling dan menyerap panas dari refrigerant R-134a yang mengalir pada sisi pipa utama. Untuk meningkatkan efektifitas dari pre – cooling tersebut, dapat dilakukan dengan memperluas bidang penukaran panas dengan cara extended surface.
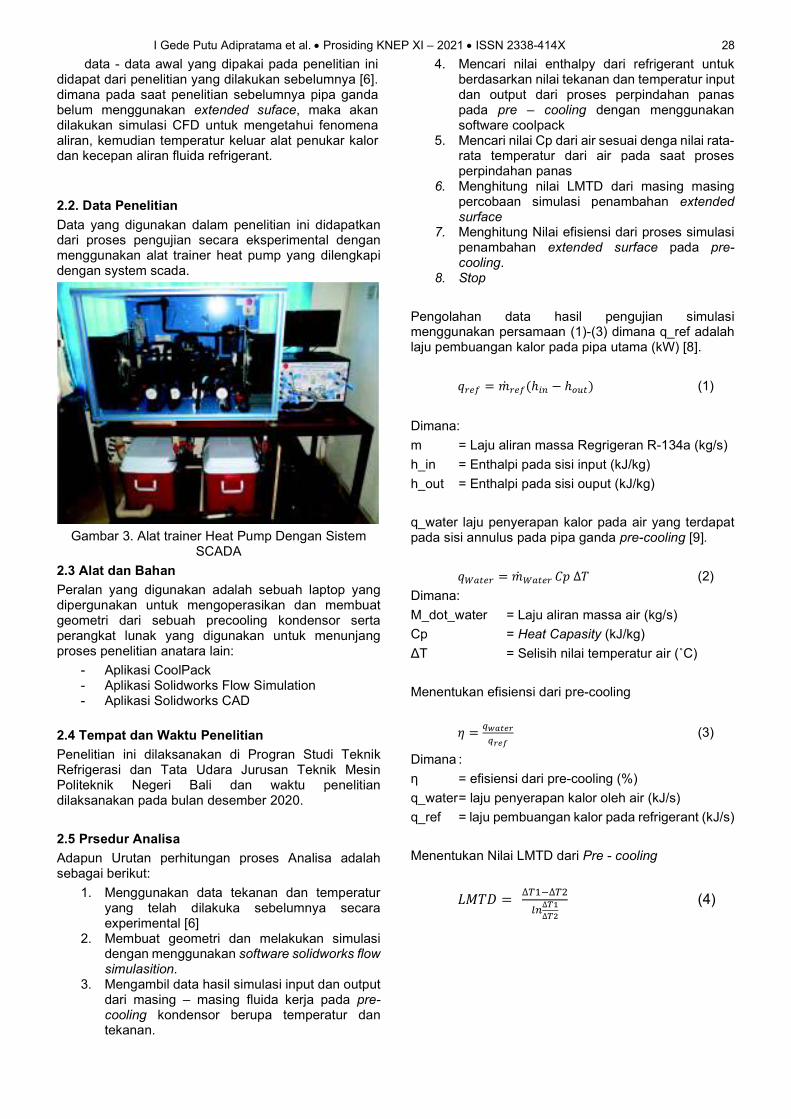
I Gede Putu Adipratama et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 28
data - data awal yang dipakai pada penelitian ini didapat dari penelitian yang dilakukan sebelumnya [6]. dimana pada saat penelitian sebelumnya pipa ganda belum menggunakan extended suface, maka akan dilakukan simulasi CFD untuk mengetahui fenomena aliran, kemudian temperatur keluar alat penukar kalor dan kecepan aliran fluida refrigerant.
2.2. Data Penelitian
Data yang digunakan dalam penelitian ini didapatkan dari proses pengujian secara eksperimental dengan menggunakan alat trainer heat pump yang dilengkapi dengan system scada.
Gambar 3. Alat trainer Heat Pump Dengan Sistem SCADA
2.3 Alat dan Bahan
Peralan yang digunakan adalah sebuah laptop yang dipergunakan untuk mengoperasikan dan membuat geometri dari sebuah precooling kondensor serta perangkat lunak yang digunakan untuk menunjang proses penelitian anatara lain:
- Aplikasi CoolPack - Aplikasi Solidworks Flow Simulation - Aplikasi Solidworks CAD
2.4 Tempat dan Waktu Penelitian
Penelitian ini dilaksanakan di Progran Studi Teknik Refrigerasi dan Tata Udara Jurusan Teknik Mesin Politeknik Negeri Bali dan waktu penelitian dilaksanakan pada bulan desember 2020.
2.5 Prsedur Analisa
Adapun Urutan perhitungan proses Analisa adalah sebagai berikut:
1. Menggunakan data tekanan dan temperatur yang telah dilakuka sebelumnya secara experimental [6]
2. Membuat geometri dan melakukan simulasi dengan menggunakan software solidworks flow simulasition.
3. Mengambil data hasil simulasi input dan output dari masing – masing fluida kerja pada pre-cooling kondensor berupa temperatur dan tekanan.
4. Mencari nilai enthalpy dari refrigerant untuk berdasarkan nilai tekanan dan temperatur input dan output dari proses perpindahan panas pada pre – cooling dengan menggunakan software coolpack
5. Mencari nilai Cp dari air sesuai denga nilai rata-rata temperatur dari air pada saat proses perpindahan panas
6. Menghitung nilai LMTD dari masing masing percobaan simulasi penambahan extended surface
7. Menghitung Nilai efisiensi dari proses simulasi penambahan extended surface pada pre-cooling.
8. Stop
Pengolahan data hasil pengujian simulasi menggunakan persamaan (1)-(3) dimana q_ref adalah laju pembuangan kalor pada pipa utama (kW) [8].
(1)
Dimana:
m = Laju aliran massa Regrigeran R-134a (kg/s)
h_in = Enthalpi pada sisi input (kJ/kg)
h_out = Enthalpi pada sisi ouput (kJ/kg)
q_water laju penyerapan kalor pada air yang terdapat pada sisi annulus pada pipa ganda pre-cooling [9].
(2)
Dimana:
M_dot_water = Laju aliran massa air (kg/s)
Cp = Heat Capasity (kJ/kg)
ΔT = Selisih nilai temperatur air (˚C)
Menentukan efisiensi dari pre-cooling
(3)
Dimana :
η = efisiensi dari pre-cooling (%)
q_water = laju penyerapan kalor oleh air (kJ/s)
q_ref = laju pembuangan kalor pada refrigerant (kJ/s)
Menentukan Nilai LMTD dari Pre - cooling
(4)
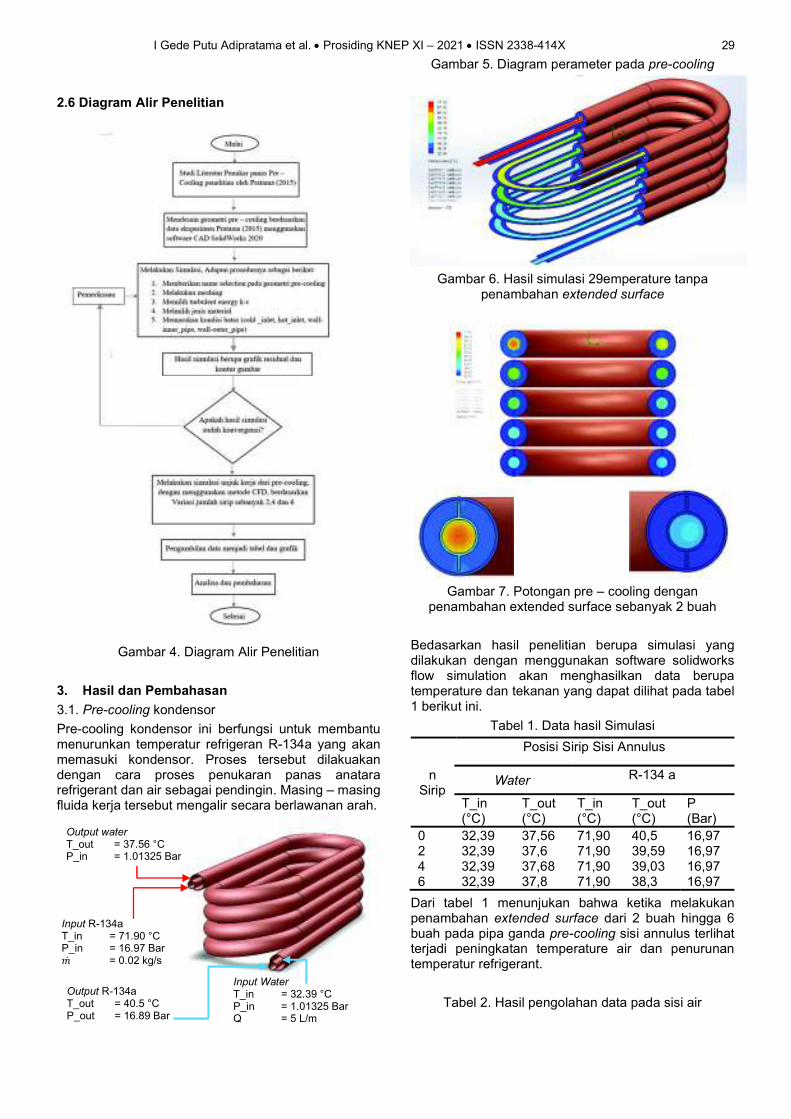
I Gede Putu Adipratama et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 29
2.6 Diagram Alir Penelitian
Gambar 4. Diagram Alir Penelitian
3. Hasil dan Pembahasan
3.1. Pre-cooling kondensor
Pre-cooling kondensor ini berfungsi untuk membantu menurunkan temperatur refrigeran R-134a yang akan memasuki kondensor. Proses tersebut dilakuakan dengan cara proses penukaran panas anatara refrigerant dan air sebagai pendingin. Masing – masing fluida kerja tersebut mengalir secara berlawanan arah.
Gambar 5. Diagram perameter pada pre-cooling
Gambar 6. Hasil simulasi 29emperature tanpa penambahan extended surface
Gambar 7. Potongan pre – cooling dengan penambahan extended surface sebanyak 2 buah
Bedasarkan hasil penelitian berupa simulasi yang dilakukan dengan menggunakan software solidworks flow simulation akan menghasilkan data berupa temperature dan tekanan yang dapat dilihat pada tabel 1 berikut ini.
Tabel 1. Data hasil Simulasi
n Sirip
Posisi Sirip Sisi Annulus
Water R-134 a
T_in (°C)
T_out (°C)
T_in (°C)
T_out (°C)
P (Bar)
0 32,39 37,56 71,90 40,5 16,97 2 32,39 37,6 71,90 39,59 16,97 4 32,39 37,68 71,90 39,03 16,97 6 32,39 37,8 71,90 38,3 16,97
Dari tabel 1 menunjukan bahwa ketika melakukan penambahan extended surface dari 2 buah hingga 6 buah pada pipa ganda pre-cooling sisi annulus terlihat terjadi peningkatan temperature air dan penurunan temperatur refrigerant.
Tabel 2. Hasil pengolahan data pada sisi air
Input R-134a T_in = 71.90 °C P_in = 16.97 Bar
= 0.02 kg/s
Output water T_out = 37.56 °C P_in = 1.01325 Bar
Output R-134a T_out = 40.5 °C P_out = 16.89 Bar
Input Water T_in = 32.39 °C P_in = 1.01325 Bar Q = 5 L/m
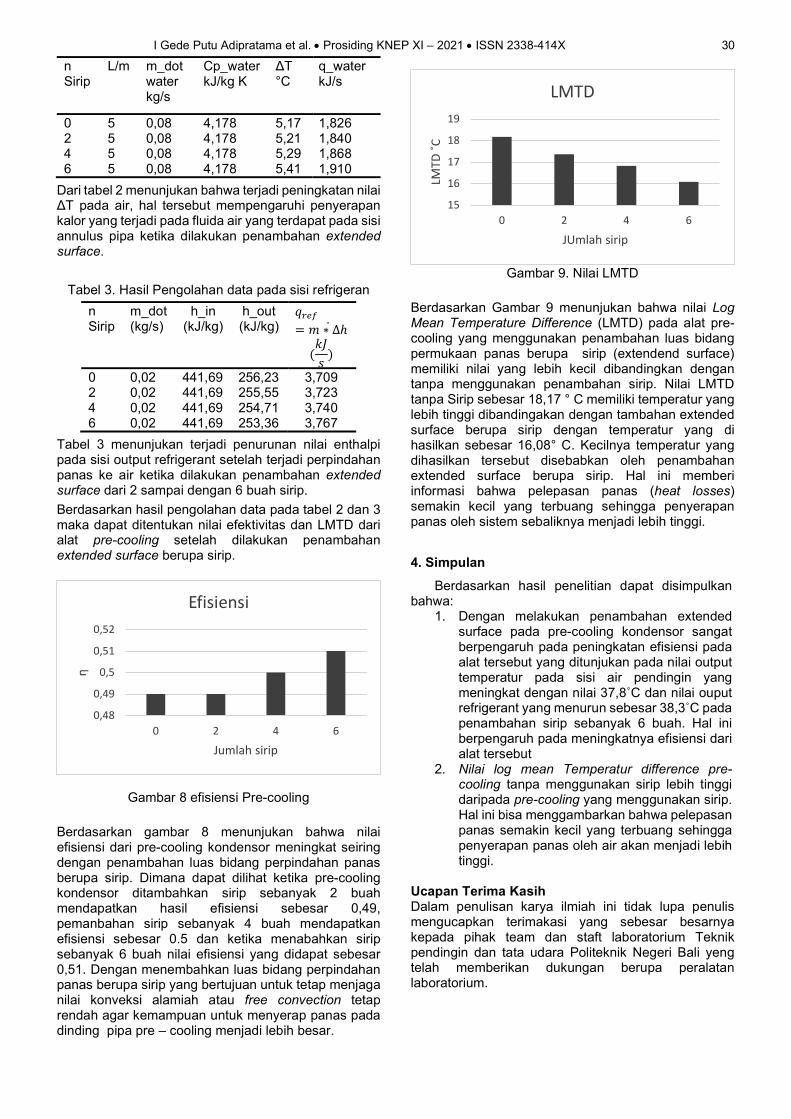
I Gede Putu Adipratama et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 30
n Sirip
L/m m_dot water kg/s
Cp_water kJ/kg K
ΔT °C
q_water kJ/s
0 5 0,08 4,178 5,17 1,826 2 5 0,08 4,178 5,21 1,840 4 5 0,08 4,178 5,29 1,868 6 5 0,08 4,178 5,41 1,910
Dari tabel 2 menunjukan bahwa terjadi peningkatan nilai ΔT pada air, hal tersebut mempengaruhi penyerapan kalor yang terjadi pada fluida air yang terdapat pada sisi annulus pipa ketika dilakukan penambahan extended surface.
Tabel 3. Hasil Pengolahan data pada sisi refrigeran
n Sirip
m_dot (kg/s)
h_in (kJ/kg)
h_out (kJ/kg)
0 0,02 441,69 256,23 3,709 2 0,02 441,69 255,55 3,723 4 0,02 441,69 254,71 3,740 6 0,02 441,69 253,36 3,767
Tabel 3 menunjukan terjadi penurunan nilai enthalpi pada sisi output refrigerant setelah terjadi perpindahan panas ke air ketika dilakukan penambahan extended surface dari 2 sampai dengan 6 buah sirip.
Berdasarkan hasil pengolahan data pada tabel 2 dan 3 maka dapat ditentukan nilai efektivitas dan LMTD dari alat pre-cooling setelah dilakukan penambahan extended surface berupa sirip.
Gambar 8 efisiensi Pre-cooling
Berdasarkan gambar 8 menunjukan bahwa nilai efisiensi dari pre-cooling kondensor meningkat seiring dengan penambahan luas bidang perpindahan panas berupa sirip. Dimana dapat dilihat ketika pre-cooling kondensor ditambahkan sirip sebanyak 2 buah mendapatkan hasil efisiensi sebesar 0,49, pemanbahan sirip sebanyak 4 buah mendapatkan efisiensi sebesar 0.5 dan ketika menabahkan sirip sebanyak 6 buah nilai efisiensi yang didapat sebesar 0,51. Dengan menembahkan luas bidang perpindahan panas berupa sirip yang bertujuan untuk tetap menjaga nilai konveksi alamiah atau free convection tetap rendah agar kemampuan untuk menyerap panas pada dinding pipa pre – cooling menjadi lebih besar.
Gambar 9. Nilai LMTD
Berdasarkan Gambar 9 menunjukan bahwa nilai Log Mean Temperature Difference (LMTD) pada alat pre-cooling yang menggunakan penambahan luas bidang permukaan panas berupa sirip (extendend surface) memiliki nilai yang lebih kecil dibandingkan dengan tanpa menggunakan penambahan sirip. Nilai LMTD tanpa Sirip sebesar 18,17 ° C memiliki temperatur yang lebih tinggi dibandingakan dengan tambahan extended surface berupa sirip dengan temperatur yang di hasilkan sebesar 16,08° C. Kecilnya temperatur yang dihasilkan tersebut disebabkan oleh penambahan extended surface berupa sirip. Hal ini memberi informasi bahwa pelepasan panas (heat losses) semakin kecil yang terbuang sehingga penyerapan panas oleh sistem sebaliknya menjadi lebih tinggi.
4. Simpulan
Berdasarkan hasil penelitian dapat disimpulkan bahwa:
1. Dengan melakukan penambahan extended surface pada pre-cooling kondensor sangat berpengaruh pada peningkatan efisiensi pada alat tersebut yang ditunjukan pada nilai output temperatur pada sisi air pendingin yang meningkat dengan nilai 37,8˚C dan nilai ouput refrigerant yang menurun sebesar 38,3˚C pada penambahan sirip sebanyak 6 buah. Hal ini berpengaruh pada meningkatnya efisiensi dari alat tersebut
2. Nilai log mean Temperatur difference pre-cooling tanpa menggunakan sirip lebih tinggi daripada pre-cooling yang menggunakan sirip. Hal ini bisa menggambarkan bahwa pelepasan panas semakin kecil yang terbuang sehingga penyerapan panas oleh air akan menjadi lebih tinggi.
Ucapan Terima Kasih Dalam penulisan karya ilmiah ini tidak lupa penulis mengucapkan terimakasi yang sebesar besarnya kepada pihak team dan staft laboratorium Teknik pendingin dan tata udara Politeknik Negeri Bali yeng telah memberikan dukungan berupa peralatan laboratorium.
0,48
0,49
0,5
0,51
0,52
0 2 4 6
η
Jumlah sirip
Efisiensi
15
16
17
18
19
0 2 4 6
LMT
D ˚
C
JUmlah sirip
LMTD
I Gede Putu Adipratama et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 31
Daftar Pustaka
[1] S. Ihsan, “Analisis Bentuk Aliran pada Kondensor Tipe Shell Dan Tube Menggunakan Simulasi CFD (Computational Fluid Dynamics),” Anal. bentuk aliran pada Kondens. tipe shell dan tube menggunakan simulasi CFD (computational fluid Dyn.), vol. 1, no. 1, pp. 15–18, 2018.
[2] and N. R. H. Fachrudin, Arif Rochman, Gumono, “PENGARUH JUMLAH SIRIP TERHADAP PERPINDAHAN PANAS PADA DOUBLE PIPE HEAT EXCHANGER,” vol. 2, no. 2, pp. 68–71, 2019.
[3] E. Aristya and P. Putra, “Alat Penukar Kalor Pipa Ganda Dengan Pengarah Beralur Helix,” vol. 9, no. 1, pp. 808–813, 2018.
[4] A. Tangkesalu, I. G. B. W. Kusuma, and I. Nengah, “Analisis Perpindahan Panas Pada Cooler Tank FASSIP - 01,” vol. 3, no. 1, pp. 11–20, 2017.
[5] A. Mahran Noufal, I. G. B. W. Kusuma, and I. Nengah, “Analisis Perpindahan Panas Pada Cooler Tank FASSIP - 01,” vol. 3, no. 1, pp. 11–20, 2017.
[6] Pratama Adi, H. Wijaksana, and I. N. Suarnadwipa, “Analisa komparasi eksperimental kinerja pompa kalor dengan menggunakan refrigerant R – 134a dan MC – 134 untuk produksi air panas,” vol. 1, no. 1, pp. 1–6, 2015.
[7] Kern, Kern’s Process Heat Transfer, Second. USA: wiley, 2019.
[8] C. P. Arora, “Refrigeration and Air Conditioning.” Tata McGraw-Hill, New Delhi, p. 778, 2006.
[9] D. P. D. Incropera, Frank P., Theodore L. Bergman, Adrienne S. Lavine, Heat And Mass Transfer, Seventh. United State Of America: John Wiley and Son, 2011.
I Gede Putu Adipratama menyelesaikan pendidikan S1 Teknik Mesin di Universitas Udayana tahun 2016. Ia menyelesaikan studi program sarjana dengan topik penelitian Analisis Komparasi Eksperimental Kinerja Pompa Kalor Dengan Menggunakan Refrigerant R-134a dan MC 134 Untuk Produksi Air Panas
I Gusti Bagus Wijaya Kusuma menyelesaikan pendidikan S1 Teknik Mesin di Institut Teknologi Sepuluh Nopember. Program Magister dan Doktoral di selesaikan di Brunel University, Inggris. pada tahun 1999 dan pada tahun 2003 ia dikukuhkan sebagai profesor dan Saat ini ia bekerja sebagai dosen di Jurusan Teknik Mesin Universitas Udayana.
I Nyoman Agus Adi Saputra menyelesaikan studi program sarjana di Jurusan Pendidikan Teknik Mesin Universitas Pendidikan Ganesha dari tahun 2014 sampai 2018. Program magister di selesaikan di Universitas Udayana tahun 2019.

Prosiding Konferensi Nasional Engineering Perhotelan XI, Universitas Udayana - 2021
ISSN 2338-414X
*Korespondensi: Tel./Fax.: 081246014256 E-mail: [email protected]
ÓTeknik Mesin Universitas Udayana 2021
PERANCANGAN SISTEM KONTROL HYBRID MENGGUNAKAN MATLAB/SIMULINK PADA SIMULASI KAKI BIONIK
Made Arbi Parameswara1), I Wayan Widhiada2), I Gusti Ngurah Nitya Santhiarsa3) 1,2,3)Program Teknik Mesin Universitas Udayana, Kampus Bukit Jimbaran Bali
Abstrak Alat yang mempu membantu kondisi disabilitas sesorang yang mengalami hilangnya anggota tubuh, khususnya pada bagian ekstrimitas bawah (tuna daksa) adalah kaki bionik. Kaki bionik harus memiliki kontrol yang memumpuni sehingga seorang disabilitas yang menggunakannya dapat melakukan aktivitas secara optimal, salah satu kontrol yang dapat digunakan untuk mengurangi error dan overshoot, serta mengurangi settle time pada sistem adalah dengan menggunakan kontrol hybrid. Kaki bionik ini akan disimulasikan menggunakan software Matlab/Simulink dan dikombinasikan dengan Add-Ons Simscape untuk meningkatkan visulasisasi gerakan kaki bionik. Simulasi akan bergerak dengan pergerakan sudut motor DC antara 0 - 60 ° derajat dan sebaliknya, mengikuti konsep gait cycle. Hasil simulasi pengontrol hybrid adalah 0.0715% pada maximum overshoot, 0.0715% pada kondisi steady – state error, dan 1.23 detik pada settle time Kata kunci: Simscape; Hybrid; Matlab; Simlasi
Abstract
Instument thatfcanhhelpfto improve the conditionlof asperson with a disability who has lost limbs, especially in the lower extremities is the bionic leg. The bionic leg must have an adequate control so that a person with a disability who uses it can perform activities optimally, Hybrid control can be used to improve the system by reduce errors and overshoot, and reduce the settle time of the control system is to use hybrid control. This bionic foot will be simulated using Matlab / Simulink software and combined with the Simscape Add-Ons to improve the visibility of the bionic foot movement. The simulation will move with the DC motor angular movement between 0 - 60 ° degrees and vice versa, following the gait cycle concept. The hybrid controller simulation results are 0.0715% at maximum overshoot, 0.0715% at steady-state errors, and 1.23 seconds at system timing.
Keywords: Simscape; Hybrid; Matlab; Simulation
1. Pendahuluan
Disabilitas adalah merupakan sebuah kondisi yang dialami sesorang baik akibat kecacatan saat lahir atau kecelakan sehingga menyebabkan terjadinya penurunan aktivitas dan partisipasi yang pada umumnya dapat mengganggu kehidupan seorang penyandang disabilitas [1]. Disabilitas digolongkan berdasarkan area terjadinya kelainan, salah satunya adalah area ekstrimitas bawah dimana penyandang disabilitas ini dibantu dengan alat bantu agar mampu meningkatkan aktivitas dan partisipasi dari penyandang disabilitas [2].
Perkembangan anggota tubuh palsu di Bali salah satunya yang dilakukan oleh Puspadi Bali menyediakan anggota tubuh palsu yang relatif murah dan mudah dalam pembuatannya, akan tetapi anggota tubuh palsu tersebut masih bersifat konvensional sehingga masih banyak kendala yang dialami oleh pengguna seperti kesulitan. dan menghabiskan banyak energi untuk menggerakkan prostesis. Masalah tersebut dapat dikurangi dengan membuat bionic leg atau robot prostetik, yaitu kaki prostetik di bagian lutut dengan menggunakan sistem robotik.
Kaki bionik merupakan alat yang menggantikan sebagian tubuh akibat amputasi atau bawaan. Bagian ini di bawah lutut. Tungkai bionik merupakan penelitian yang mengintegrasikan prinsip mekatronika, penginderaan cerdas dan kontrol untuk mencapai fungsi sensorik motorik dan menjaga kemampuan fisik bagian tubuh yang diamputasi [3]. Kaki bionik dapat
digunakan sebagai alat alternatif bagi penyandang disabilitas ekstremitas bawah untuk mendukung pergerakan masyarakat dalam melakukan aktivitas.
Salah satu tahap penting dalam penelitian kaki bionik adalah dengan melakukan simulasi. Simulasi merupakan tahapan yang penting untuk dapat mengestimasi kesuksesan sistem kontrol pada kaki bionik sebelum sistem melangkah ke tahapan eksperimen.
Matlab/Simulink merupakan salah satu aplikasi simulasi yang dapat membantu tahapan proses simulasi pada penelitian ini. Dengan adanya simscape pada software ini peneliti mampu mensimulasikan sistem kaki bionik dengan visual yang lebih baik. Gerakan kaki bionik di lutut bergerak dengan 1 DOF. Autodesk Inventor 2018 akan menjadi perangkat lunak desain yang peneliti gunakan untuk merancang kaki bionik.
Pemilihan kontrol hybrid bertujuan untuk mengambil performa terbaik dari kontrol PID dan kontrol logika fuzzy dimana dengan mengkombinasikan kedua kontrol ini diharapkan mampu untuk menghasilkan parameter – parameter yang sesuai dengan spesifikasi terbaik dari sebuah sistem.
Parameter – parameter ini merupakan sebuah tolok ukur dari kesuksesan dalam perancangan sistem kontrol ini dimana parameter – parameter tersebut adalah parameter kontrol dengan detail sebagai berikut steady state error signal ≤ 5%, percentage overshoot (OS%) ≤ 5%, dan settle time ≤ 15 s.
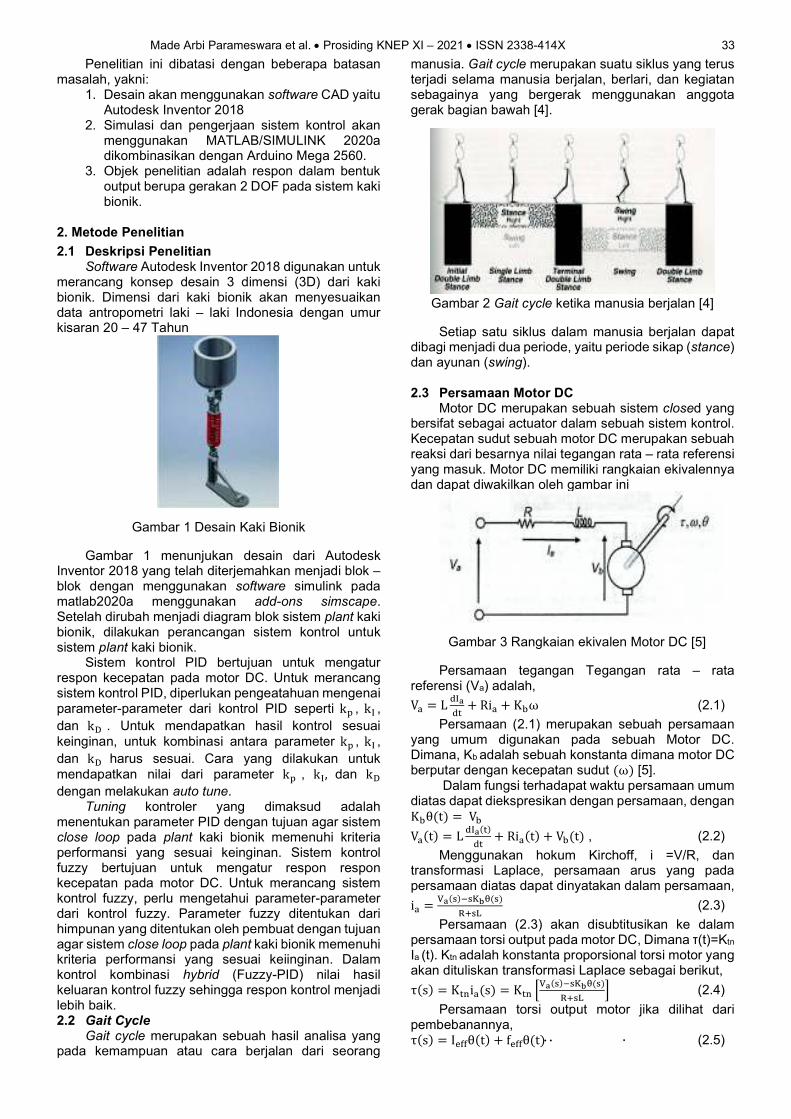
Made Arbi Parameswara et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 33
Penelitian ini dibatasi dengan beberapa batasan masalah, yakni:
1. Desain akan menggunakan software CAD yaitu Autodesk Inventor 2018
2. Simulasi dan pengerjaan sistem kontrol akan menggunakan MATLAB/SIMULINK 2020a dikombinasikan dengan Arduino Mega 2560.
3. Objek penelitian adalah respon dalam bentuk output berupa gerakan 2 DOF pada sistem kaki bionik.
2. Metode Penelitian
2.1 Deskripsi Penelitian Software Autodesk Inventor 2018 digunakan untuk
merancang konsep desain 3 dimensi (3D) dari kaki bionik. Dimensi dari kaki bionik akan menyesuaikan data antropometri laki – laki Indonesia dengan umur kisaran 20 – 47 Tahun
Gambar 1 Desain Kaki Bionik
Gambar 1 menunjukan desain dari Autodesk Inventor 2018 yang telah diterjemahkan menjadi blok – blok dengan menggunakan software simulink pada matlab2020a menggunakan add-ons simscape. Setelah dirubah menjadi diagram blok sistem plant kaki bionik, dilakukan perancangan sistem kontrol untuk sistem plant kaki bionik.
Sistem kontrol PID bertujuan untuk mengatur respon kecepatan pada motor DC. Untuk merancang sistem kontrol PID, diperlukan pengeatahuan mengenai parameter-parameter dari kontrol PID seperti , ,
dan . Untuk mendapatkan hasil kontrol sesuai
keinginan, untuk kombinasi antara parameter , ,
dan harus sesuai. Cara yang dilakukan untuk
mendapatkan nilai dari parameter , dan
dengan melakukan auto tune. Tuning kontroler yang dimaksud adalah
menentukan parameter PID dengan tujuan agar sistem close loop pada plant kaki bionik memenuhi kriteria performansi yang sesuai keinginan. Sistem kontrol fuzzy bertujuan untuk mengatur respon respon kecepatan pada motor DC. Untuk merancang sistem kontrol fuzzy, perlu mengetahui parameter-parameter dari kontrol fuzzy. Parameter fuzzy ditentukan dari himpunan yang ditentukan oleh pembuat dengan tujuan agar sistem close loop pada plant kaki bionik memenuhi kriteria performansi yang sesuai keiinginan. Dalam kontrol kombinasi hybrid (Fuzzy-PID) nilai hasil keluaran kontrol fuzzy sehingga respon kontrol menjadi lebih baik. 2.2 Gait Cycle
Gait cycle merupakan sebuah hasil analisa yang pada kemampuan atau cara berjalan dari seorang
manusia. Gait cycle merupakan suatu siklus yang terus terjadi selama manusia berjalan, berlari, dan kegiatan sebagainya yang bergerak menggunakan anggota gerak bagian bawah [4].
Gambar 2 Gait cycle ketika manusia berjalan [4]
Setiap satu siklus dalam manusia berjalan dapat dibagi menjadi dua periode, yaitu periode sikap (stance) dan ayunan (swing).
2.3 Persamaan Motor DC
Motor DC merupakan sebuah sistem closed yang bersifat sebagai actuator dalam sebuah sistem kontrol. Kecepatan sudut sebuah motor DC merupakan sebuah reaksi dari besarnya nilai tegangan rata – rata referensi yang masuk. Motor DC memiliki rangkaian ekivalennya dan dapat diwakilkan oleh gambar ini
Gambar 3 Rangkaian ekivalen Motor DC [5]
Persamaan tegangan Tegangan rata – rata referensi (Va) adalah,
(2.1)
Persamaan (2.1) merupakan sebuah persamaan yang umum digunakan pada sebuah Motor DC. Dimana, Kb adalah sebuah konstanta dimana motor DC berputar dengan kecepatan sudut [5].
Dalam fungsi terhadapat waktu persamaan umum diatas dapat diekspresikan dengan persamaan, dengan
, (2.2)
Menggunakan hokum Kirchoff, i =V/R, dan transformasi Laplace, persamaan arus yang pada persamaan diatas dapat dinyatakan dalam persamaan,
(2.3)
Persamaan (2.3) akan disubtitusikan ke dalam persamaan torsi output pada motor DC, Dimana τ(t)=Ktn Ia (t). Ktn adalah konstanta proporsional torsi motor yang akan dituliskan transformasi Laplace sebagai berikut,
(2.4)
Persamaan torsi output motor jika dilihat dari pembebanannya,
(2.5)
Made Arbi Parameswara et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 34
Untuk Menentukan Inersia efektif (Ieff) dapat ditentukan dengan mengetahui momen inersia poros motor (Im) dan momen inersia beban pada poros motor (IL). Dimana Ieff = Im + IL dan untuk Menentukan koefisien friksi viskous (feff) dapat ditentukan dengan mengetahui koefisien friksi poros motor (fm) dan koefisien friksi viskous pada beban di poros motor (fl). Dimana adalah feff = fm + fl
(2.6)
Persamaan (2.6) dapat disingkat menjadi,
(2.7)
Sehingga fungsi sudut ( ) terhadap variabel – variabel kelistrikan dapat ditulis
(2.8)
Dengan , dimana (K) adalah
konstanta motor berbentuk gain, dan ,
konstanta dalam bentuk waktu. Diagram blok fungsi transfer open-loop persamaan
(2.8) dinyatakan seperti berikut.
Gambar 4 Fungsi Transfer Open-loop Motor DC [5]
Gambar 4 adalah bentuk matematik dari sebuah motor DC secara menyeluruh. Dikarenakan tidak semua variable diketahui sehingga kebanyakan variable menggunakan asumsi – asumsi yang mendekati [5].
2.4 Kontrol Hybrid
Kontrol Hybrid (PID-Fuzzy) merupakan gabungan antara kontrol PID dengan kontrol fuzzy. Dimana dengan menggabungkan kontrol PID dengan kontrol fuzzy, Kontrol PID bertugas untuk meningkatkan akurasi dari nilai output yang dihasilkan oleh kontrol fuzzy sebelum nilai ini dikirim ke motor.
Gambar 5 Susunan blok diagram pada kontrol PID-fuzzy [6]
2.5 SistemlRespon Sistemskontrol memiliki dua area respon yang
digunakan untuk menganalisis performa suatu sistem kontrol yaitu transient response dan steady error response transient dan steady state error dapat dikontrolkan dengan lebih baik dalam sistem loop tertutup [7].
Gambar 6 Grafik Parameter Kinerja Sistem Pengendalian
Gambar 6 Merupakan grafik parameter sistem kontrol secara umum.
2.6 Pemodelan Matematika Sistem Suspensi Kaki
Bionik
Gambar 1. Model Matematika Sistem Kaki Bionik
(2.9)
Gaya pegas untuk DOF y dengan asumsi
(2.10)
Persamaan gaya damper
(2.11)
(2.12)
Jadi, persamaan gaya DOF y adalah
(2.13)
Gambar 2. FBD Persamaan Getaran DOFy
Momen inersia sistem dengan asumsi
(2.14)
Persamaan gaya pegas (2.15)
Persamaan gaya damper
(2.16)

Made Arbi Parameswara et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 35
Jadi persamaan gaya DOF adalah
(2.17)
(2.18)
2.7 Alat dan Bahan Penelitian
Penelitian kaki bionik ini menggunakan beberapa alat dan bahan, berupa:
1. Komputer 2. Software Matlab/Simulink R2020a 3. Autodesk Inventor 2018
2.8 Prosedur Penelitian Penelitian kaki bionik ini adalah sebagai berikut: 1. Desain 3D Sistem Kaki bionik 2. Import File 3D 3. Penyesuaian Sistem Mekanis pada Simulink 4. Perancangan dan Penyesuaian Kontrol Hybrid
pada tahap Simulasi 5. Simulasi 6. Analisa Data
2.9 Diagram Alir Prosedur Penelitian
2.10 Metode Simulasi Persamaan matematis motor servo DC digunakan
sebagai acuan untuk simulasi sistem kaki bionik
Gambar 3. Simulasi Tanpa kontrol Blok Diagram
Gambar 4. Simulasi Hybrid Blok Diagram
Dalam simulasi pengontrol hybrid, PID [8] dan kontrol logika fuzzy [9], dimana pengontrol PID akan mengontrol sistem terlebih dahulu dengan tujuan agar dapat menyesuaikan nilai yang dihasilkan sebelum memasuki pengendali logika fuzzy.
2.11 Kontrol Hybrid Simulasi
Gambar 5. Input E (Sudut)
Gambar 6. Input CE (Perbuahan Sudut)
Input yang dimasukkan ke dalam perancang Fuzzy Logic adalah perubahan sudut dan sudut. Dengan kisaran antara (-1) – 1 derajat.
. Gambar 7. Output U (Sudut)
Hubungan antara 2 masukan (sudut dan perubahan sudut) dengan 1 keluaran (sudut).
Made Arbi Parameswara et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 36
Gambar 8. Fuzzy Logic Surface Viewer
Output dibuat berdasarkan input dan sudut referensi.
Gambar 9. PID Control Viewer
Kontrol PID menggunakan konstanta
2.11 Analisa Data Autodesk Inventor bisa menjadi aplikasi untuk
membuat desain implan [10]. Visualisasi pemodelan Bionic leg menggunakan Autodesk Inventor dan menggunakan MATLAB / Simulink sebagai software dengan kontroler hybrid. MATLAB merupakan aplikasi yang digunakan untuk mengoperasikan dan mensimulasikan sistem. Variabel bebas dalam penelitian ini adalah pengontrol hybrid dan tanpa kontrol di kaki bionik.
3. Hasil dan Pembahasan 3.1 Simscape Multibody Matlab/Simulink
Gambar 16. Hasil Simulasi dengan Simscape
Multibody di Matlab/Simulink
Gambar 10 Grafik simulasi Tanpa kontrol (0 – 60 derajat)
Pada simulasi ini nilai tanpa kontrol mengalami error yang cukup besar akibat kurangnya kontroler, dengan maksimum overshoot 64.10685 derajat atau 6,84% dan error steady state sebesar 4,10686 derajat atau 6,84% dari referensi.
Gambar 11 Grafik Simulasi Tanpa kontrol (60 – 0 derajat)
Pada simulasi ini, tanpa kontrol memiliki error yang besar karena kurangnya kontroler, dengan overshoot maksimum sebesar -4,1068 derajat atau 6,82% dan error steady state sebesar -4,1068 derajat dari sudut referensi atau 6,82%.
Tabel 1 Hasil Simulasi Tanpa Kontrol
Gambar 12 Grafik Simulasi Kontrol Hybrid (0 – 60 derajat)
Hasil simulasi hybrid telah memenuhi persyaratan karena kontroler hybrid tepat mengontrol simulasi, dengan overshoot maksimum 60.00072 derajat atau 0,0012% dan error 0,03051 derajat dari sudut referensi atau 0,051%.
No Parameter Simulasi Tanpa Kontrol
0 - 60 60 - 0
1 Maximum Overshoot
(%) 6.84% 6.84%
2 Error (%) 6.84% 6.84%
3 Settle Time
(s) 5.84 s 5.84 s
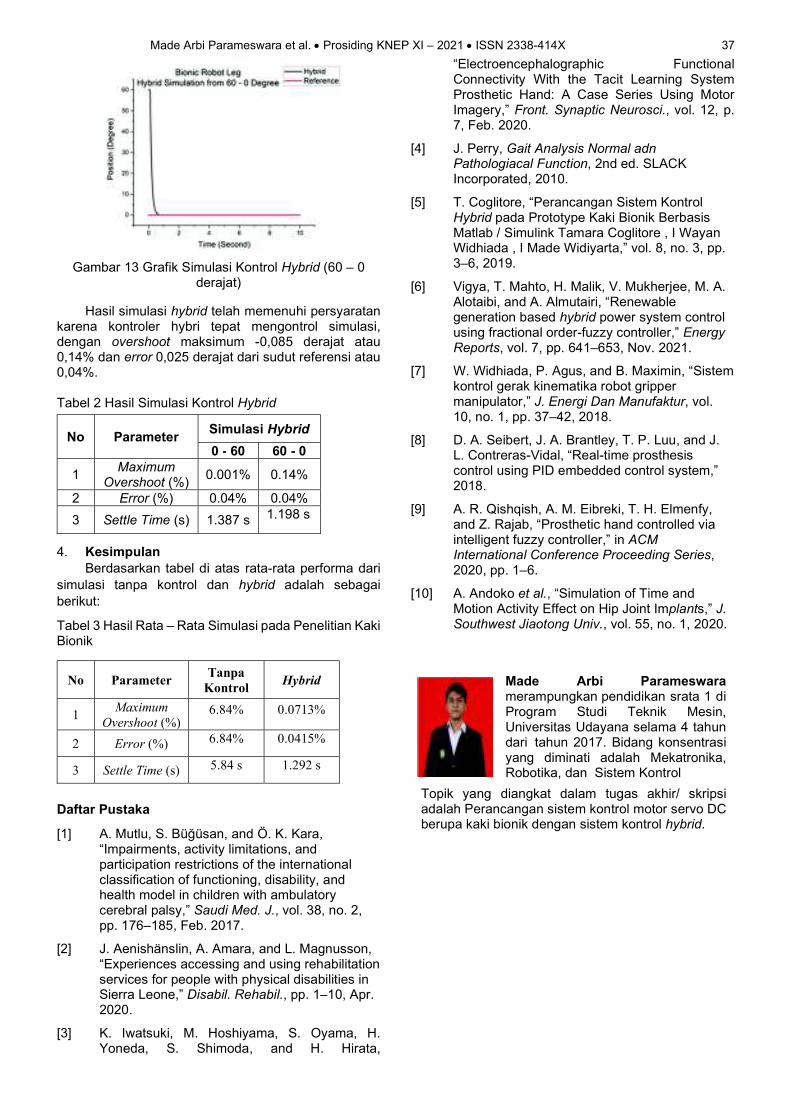
Made Arbi Parameswara et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 37
Gambar 13 Grafik Simulasi Kontrol Hybrid (60 – 0
derajat)
Hasil simulasi hybrid telah memenuhi persyaratan karena kontroler hybri tepat mengontrol simulasi, dengan overshoot maksimum -0,085 derajat atau 0,14% dan error 0,025 derajat dari sudut referensi atau 0,04%.
Tabel 2 Hasil Simulasi Kontrol Hybrid
4. Kesimpulan
Berdasarkan tabel di atas rata-rata performa dari
simulasi tanpa kontrol dan hybrid adalah sebagai
berikut:
Tabel 3 Hasil Rata – Rata Simulasi pada Penelitian Kaki Bionik
Daftar Pustaka
[1] A. Mutlu, S. Büğüsan, and Ö. K. Kara, “Impairments, activity limitations, and participation restrictions of the international classification of functioning, disability, and health model in children with ambulatory cerebral palsy,” Saudi Med. J., vol. 38, no. 2, pp. 176–185, Feb. 2017.
[2] J. Aenishänslin, A. Amara, and L. Magnusson, “Experiences accessing and using rehabilitation services for people with physical disabilities in Sierra Leone,” Disabil. Rehabil., pp. 1–10, Apr. 2020.
[3] K. Iwatsuki, M. Hoshiyama, S. Oyama, H. Yoneda, S. Shimoda, and H. Hirata,
“Electroencephalographic Functional Connectivity With the Tacit Learning System Prosthetic Hand: A Case Series Using Motor Imagery,” Front. Synaptic Neurosci., vol. 12, p. 7, Feb. 2020.
[4] J. Perry, Gait Analysis Normal adn Pathologiacal Function, 2nd ed. SLACK Incorporated, 2010.
[5] T. Coglitore, “Perancangan Sistem Kontrol Hybrid pada Prototype Kaki Bionik Berbasis Matlab / Simulink Tamara Coglitore , I Wayan Widhiada , I Made Widiyarta,” vol. 8, no. 3, pp. 3–6, 2019.
[6] Vigya, T. Mahto, H. Malik, V. Mukherjee, M. A. Alotaibi, and A. Almutairi, “Renewable generation based hybrid power system control using fractional order-fuzzy controller,” Energy Reports, vol. 7, pp. 641–653, Nov. 2021.
[7] W. Widhiada, P. Agus, and B. Maximin, “Sistem kontrol gerak kinematika robot gripper manipulator,” J. Energi Dan Manufaktur, vol. 10, no. 1, pp. 37–42, 2018.
[8] D. A. Seibert, J. A. Brantley, T. P. Luu, and J. L. Contreras-Vidal, “Real-time prosthesis control using PID embedded control system,” 2018.
[9] A. R. Qishqish, A. M. Eibreki, T. H. Elmenfy, and Z. Rajab, “Prosthetic hand controlled via intelligent fuzzy controller,” in ACM International Conference Proceeding Series, 2020, pp. 1–6.
[10] A. Andoko et al., “Simulation of Time and Motion Activity Effect on Hip Joint Implants,” J. Southwest Jiaotong Univ., vol. 55, no. 1, 2020.
No Parameter Simulasi Hybrid
0 - 60 60 - 0
1 Maximum
Overshoot (%) 0.001% 0.14%
2 Error (%) 0.04% 0.04%
3 Settle Time (s) 1.387 s 1.198 s
No Parameter Tanpa
Kontrol Hybrid
1 Maximum
Overshoot (%) 6.84% 0.0713%
2 Error (%) 6.84% 0.0415%
3 Settle Time (s) 5.84 s 1.292 s
Made Arbi Parameswara merampungkanfpendidikan srata 1 di Program Studi Teknik Mesin, Universitas Udayana selama 4 tahun darigtahun 2017. Bidang konsentrasi yang diminati adalah Mekatronika, Robotika, dan Sistem Kontrol
Topik yang diangkat dalam tugas akhir/ skripsi adalah Perancangan sistem kontrol motor servo DC berupa kaki bionik dengan sistem kontrol hybrid.

Prosiding Konferensi Nasional Engineering Perhotelan XI, Universitas Udayana - 2021
ISSN 2338-414X
*Korespondensi: Tel./Fax.: 083114931305 E-mail: [email protected]
ÓTeknik Mesin Universitas Udayana 2021
PERANCANGAN SISTEM KONTROL PID (PROPORTIONAL INTEGRAL DERIVATIVE) MENGGUNAKAN MATLAB/SIMULINK PADA KAKI BIONIK
I Gede Dharma Yuda 1), I Wayan Widhiada 2), I Gusti Ngurah Nitya Santhiarsa 3) 1,2,3)Program Studi Teknik Mesin Universitas Udayana, Kampus Bukit Jimbaran Bali
Abstrak
Kaki Bionik merupakan alat yang berfungsi sebagai pengganti anggota gerak tubuh bagian bawah untuk orang yang mengalami keterbatasan akibat cacat bawaan ataupun amputasi. Untuk menghasilkan gerak kaki bionik yang lebih responsive, akurat dan optimal dilakukan pemasangan kontrol PID untuk mengrungi maximum overshoot, steady state error, dan settle time. Pada alat kaki bionik ini menggunakan mikrokontroler Arduino Mega 2560 dengan software pemrograman menggunakan Matlab/Simulink R2020a dan menggunakan sensor myoware. Fungsi sensor pada kaki bionik untuk memberikan sinyal kepada kontroler agar
motor DC bergerak pada sudut antara 0°-60° dan sebaliknya, mengacu pada konsep gate cycle. Dengan hasil simulasi kontrol PID dengan nilai maximum overshoot sebesar 2.59%, steady state error sebesar 1.77% dan settle time sebesar 3.635 s. Dan pada hasil eksperimen kontrol PID dengan nilai maximum overshoot sebesar 2.5%, steady state error sebesar 1.212% dan settle time sebesar 1.25 s. Kata Kunci: Arduino, Kontrol, PID, Kaki Bionik, Matlab
Abstract
Bionic leg is a device has a function as a lower limb for people whom experience limitations due to congenital defects or mutations. The way to develop the bionic leg to be more responsive, accurate and optimal, a PID control is installed to reduce maximum overshoot, steady state errors and settle time. The bionic leg used an Arduino Mega 2560 microcontroller with Matlab /Simulink R2020a used as programming software and also used a myoware sensor. The function of the sensor on the bionic leg is to
provide a signal to the controller for the DC motor to move at an angle between 0°- 60° and vice versa, referring to the concept of the gait cycle. The PID simulation results are a maximum overshoot with a value of 2.59%, a steady state error of with a value of 1.77% and settle time with a value of 3.635 s. The PID control experimental results are a maximum overshoot with a value of 2.5%, a steady state error with a value of 1.212% and a time settle with a value of 1.25 s. Keywords: Arduino, Control, PID, Bionic leg, Matlab
1. Pendahuluan
Disabilitas merupakan orang yang memiliki keterbatasan fisik, intelektual maupun sensorik yang dialami dalam waktu panjang salah satunya tunadaksa. Menurut [1] tunadaksa dibagi menjadi 2 golongan berdasarkan Activity Daily Living (ADL), yaitu kategori cacat tubuh ringan dimana orang yang menderita cacat tidak memerlukan bantuan orang lain. Sementara kategori cacat tubuh sedang atau berat adalah orang yang memerlukan bantuan dalam memenuhi kebutuhannya sehari-hari. Dan umumnya kaum Tunadaksa dibantu dengan menggunakan alat bantu berupa tongkat penyangga, kursi roda, dan kaki palsu. Tunadaksa yang tergolong tidak mampu secara ekonomi saat ini sudah banyak mendapat bantuan dari dinas sosial setempat, perusahaan asuransi swasta, dan para penyumbang sukarela berupa kaki palsu.
Perkembangan kaki palsu di Indonesia juga telah dilakukan salah satunya adalah Puspadi Bali. Puspadi Bali menyediakan kaki palsu yang konvensional maka pengguna masih kesulitan untuk menggunakan kaki palsu tersebut. Dengan banyaknya tenaga yang diperlukan untuk menggerakan kaki palsu akan membebani penyandang disabilitas untuk melakukan kegiatan sehari-hari. Salah stau pemecahan masalah tersebut dengan membuat kaki bionik atau robotic prosthetic limbs, yaitu kaki palsu dengan menggunakan sistem robotik dengan tenaga motor DC.
Kaki bionik dapat menjadi alternatif untuk alat bantu penyandang disabilitas yang memerlukan alat bantu utnuk melakukan kegiatan sehari-hari. Bionik merupakan ilmu yang menggunakan struktur anatomik atau proses fisiologi dengan komponen elektronik dan mekanik. Dengan alat reseptor silikon yang dapat menghubungkan alat bantu dengan saraf.
Dengan pesatnya perkembangan ilmu seiring dengan berkembang pesatnya ilmu tentang robot. Karna kemajuan tersebut, penelitian kali ini mencakup tentang pengembangan konsep robotika kaki buatan yang diistilahkan dengan kaki bionik atau robotic prosthetic limbs [2]. Salah satu komponen kaki bionik adalah mikrokontroler yang berfungsi sebagai otak dari sistem kaki bionik. Mikrokontroler yang dapat digunakan adalah Arduino yang menawarkan berbagai jenis mikrokontroler sesuai kebutuhan. Arduino merupakan papan elektronik berbasis mikrokontroler ATMega dengan sistem minimum kontroler agar dapat bekerja secara mandiri atau standalone controller.
Kaki bionik yang dikembangkan menggunakan menggunakan sistem kendali PID (Proportional Integral Derivative controller). Kelebihan yang didapat dari pengguna sistem kendali ini yaitu dapat lebih mudah untuk melakukan pengaturan variable terukur yang didapat [3]. Diharapkan dengan adanya penelitian ini dapat menghasilkan rancangan sistem kaki bionik dengan kontrol PID yang baik bagi prototype kaki bionik
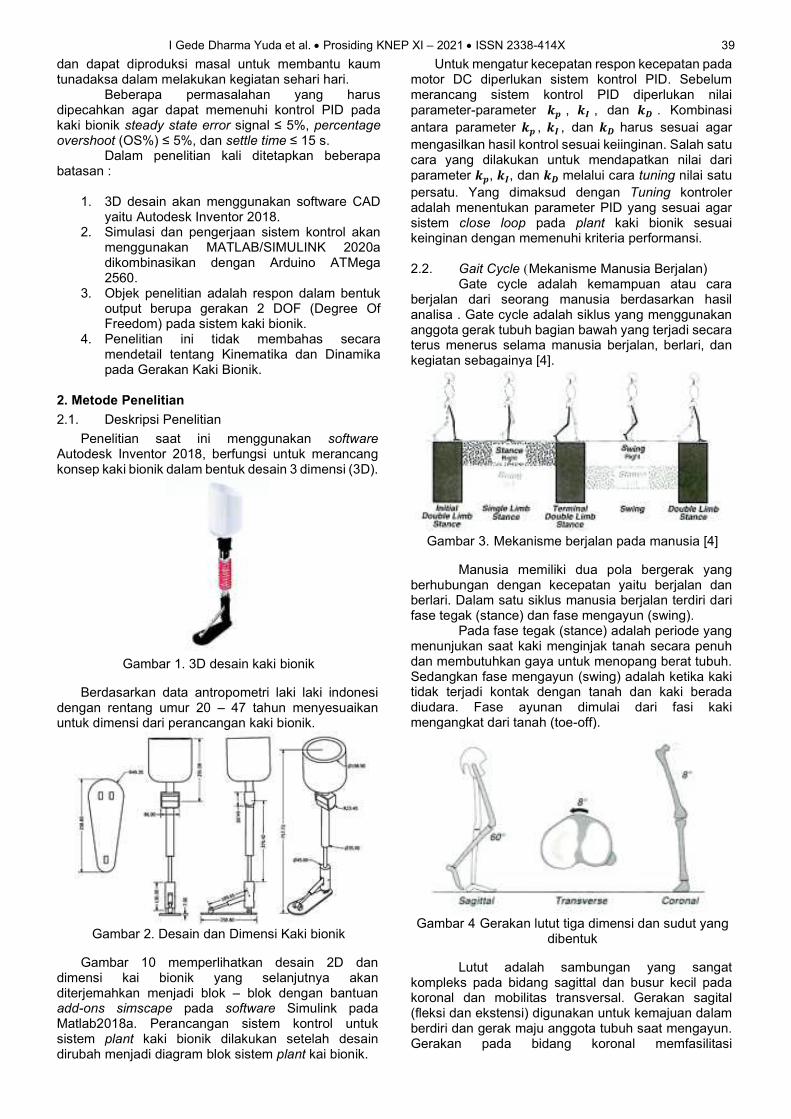
I Gede Dharma Yuda et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 39
dan dapat diproduksi masal untuk membantu kaum tunadaksa dalam melakukan kegiatan sehari hari.
Beberapa permasalahan yang harus dipecahkan agar dapat memenuhi kontrol PID pada kaki bionik steady state error signal ≤ 5%, percentage overshoot (OS%) ≤ 5%, dan settle time ≤ 15 s.
Dalam penelitian kali ditetapkan beberapa batasan :
1. 3D desain akan menggunakan software CAD
yaitu Autodesk Inventor 2018. 2. Simulasi dan pengerjaan sistem kontrol akan
menggunakan MATLAB/SIMULINK 2020a dikombinasikan dengan Arduino ATMega 2560.
3. Objek penelitian adalah respon dalam bentuk output berupa gerakan 2 DOF (Degree Of Freedom) pada sistem kaki bionik.
4. Penelitian ini tidak membahas secara mendetail tentang Kinematika dan Dinamika pada Gerakan Kaki Bionik.
2. Metode Penelitian
2.1. Deskripsi Penelitian
Penelitian saat ini menggunakan software Autodesk Inventor 2018, berfungsi untuk merancang konsep kaki bionik dalam bentuk desain 3 dimensi (3D).
Gambar 1. 3D desain kaki bionik
Berdasarkan data antropometri laki laki indonesi dengan rentang umur 20 – 47 tahun menyesuaikan untuk dimensi dari perancangan kaki bionik.
Gambar 2. Desain dan Dimensi Kaki bionik
Gambar 10 memperlihatkan desain 2D dan dimensi kai bionik yang selanjutnya akan diterjemahkan menjadi blok – blok dengan bantuan add-ons simscape pada software Simulink pada Matlab2018a. Perancangan sistem kontrol untuk sistem plant kaki bionik dilakukan setelah desain dirubah menjadi diagram blok sistem plant kai bionik.
Untuk mengatur kecepatan respon kecepatan pada motor DC diperlukan sistem kontrol PID. Sebelum merancang sistem kontrol PID diperlukan nilai parameter-parameter , , dan . Kombinasi
antara parameter , , dan harus sesuai agar
mengasilkan hasil kontrol sesuai keiinginan. Salah satu cara yang dilakukan untuk mendapatkan nilai dari parameter , , dan melalui cara tuning nilai satu
persatu. Yang dimaksud dengan Tuning kontroler adalah menentukan parameter PID yang sesuai agar sistem close loop pada plant kaki bionik sesuai keinginan dengan memenuhi kriteria performansi.
2.2. Gait Cycle (Mekanisme Manusia Berjalan)
Gate cycle adalah kemampuan atau cara berjalan dari seorang manusia berdasarkan hasil analisa . Gate cycle adalah siklus yang menggunakan anggota gerak tubuh bagian bawah yang terjadi secara terus menerus selama manusia berjalan, berlari, dan kegiatan sebagainya [4].
Gambar 3. Mekanisme berjalan pada manusia [4]
Manusia memiliki dua pola bergerak yang berhubungan dengan kecepatan yaitu berjalan dan berlari. Dalam satu siklus manusia berjalan terdiri dari fase tegak (stance) dan fase mengayun (swing).
Pada fase tegak (stance) adalah periode yang menunjukan saat kaki menginjak tanah secara penuh dan membutuhkan gaya untuk menopang berat tubuh. Sedangkan fase mengayun (swing) adalah ketika kaki tidak terjadi kontak dengan tanah dan kaki berada diudara. Fase ayunan dimulai dari fasi kaki mengangkat dari tanah (toe-off).
Gambar 4 Gerakan lutut tiga dimensi dan sudut yang
dibentuk
Lutut adalah sambungan yang sangat kompleks pada bidang sagittal dan busur kecil pada koronal dan mobilitas transversal. Gerakan sagital (fleksi dan ekstensi) digunakan untuk kemajuan dalam berdiri dan gerak maju anggota tubuh saat mengayun. Gerakan pada bidang koronal memfasilitasi
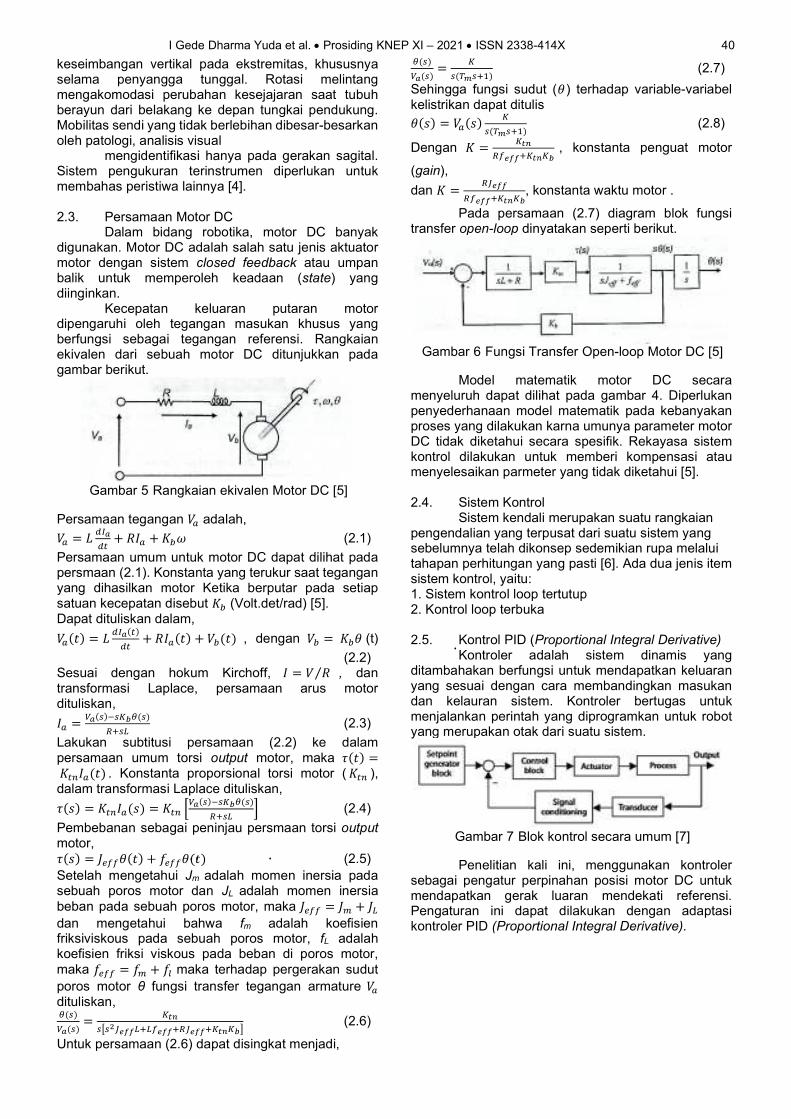
I Gede Dharma Yuda et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 40
keseimbangan vertikal pada ekstremitas, khususnya selama penyangga tunggal. Rotasi melintang mengakomodasi perubahan kesejajaran saat tubuh berayun dari belakang ke depan tungkai pendukung. Mobilitas sendi yang tidak berlebihan dibesar-besarkan oleh patologi, analisis visual
mengidentifikasi hanya pada gerakan sagital. Sistem pengukuran terinstrumen diperlukan untuk membahas peristiwa lainnya [4].
2.3. Persamaan Motor DC
Dalam bidang robotika, motor DC banyak digunakan. Motor DC adalah salah satu jenis aktuator motor dengan sistem closed feedback atau umpan balik untuk memperoleh keadaan (state) yang diinginkan.
Kecepatan keluaran putaran motor dipengaruhi oleh tegangan masukan khusus yang berfungsi sebagai tegangan referensi. Rangkaian ekivalen dari sebuah motor DC ditunjukkan pada gambar berikut.
Gambar 5 Rangkaian ekivalen Motor DC [5]
Persamaan tegangan adalah,
(2.1)
Persamaan umum untuk motor DC dapat dilihat pada persmaan (2.1). Konstanta yang terukur saat tegangan yang dihasilkan motor Ketika berputar pada setiap satuan kecepatan disebut (Volt.det/rad) [5]. Dapat dituliskan dalam,
, dengan (t)
(2.2) Sesuai dengan hokum Kirchoff, , dan transformasi Laplace, persamaan arus motor dituliskan,
(2.3)
Lakukan subtitusi persamaan (2.2) ke dalam persamaan umum torsi output motor, maka
. Konstanta proporsional torsi motor ( ), dalam transformasi Laplace dituliskan,
(2.4)
Pembebanan sebagai peninjau persmaan torsi output motor,
(2.5)
Setelah mengetahui Jm adalah momen inersia pada sebuah poros motor dan JL adalah momen inersia
beban pada sebuah poros motor, maka
dan mengetahui bahwa fm adalah koefisien friksiviskous pada sebuah poros motor, fL adalah koefisien friksi viskous pada beban di poros motor,
maka maka terhadap pergerakan sudut
poros motor θ fungsi transfer tegangan armature dituliskan,
(2.6)
Untuk persamaan (2.6) dapat disingkat menjadi,
(2.7)
Sehingga fungsi sudut ( ) terhadap variable-variabel kelistrikan dapat ditulis
(2.8)
Dengan , konstanta penguat motor
(gain),
dan , konstanta waktu motor .
Pada persamaan (2.7) diagram blok fungsi transfer open-loop dinyatakan seperti berikut.
Gambar 6 Fungsi Transfer Open-loop Motor DC [5]
Model matematik motor DC secara menyeluruh dapat dilihat pada gambar 4. Diperlukan penyederhanaan model matematik pada kebanyakan proses yang dilakukan karna umunya parameter motor DC tidak diketahui secara spesifik. Rekayasa sistem kontrol dilakukan untuk memberi kompensasi atau menyelesaikan parmeter yang tidak diketahui [5].
2.4. Sistem Kontrol
Sistem kendali merupakan suatu rangkaian pengendalian yang terpusat dari suatu sistem yang sebelumnya telah dikonsep sedemikian rupa melalui tahapan perhitungan yang pasti [6]. Ada dua jenis item sistem kontrol, yaitu: 1. Sistem kontrol loop tertutup 2. Kontrol loop terbuka 2.5. Kontrol PID (Proportional Integral Derivative)
Kontroler adalah sistem dinamis yang ditambahakan berfungsi untuk mendapatkan keluaran yang sesuai dengan cara membandingkan masukan dan kelauran sistem. Kontroler bertugas untuk menjalankan perintah yang diprogramkan untuk robot yang merupakan otak dari suatu sistem.
Gambar 7 Blok kontrol secara umum [7]
Penelitian kali ini, menggunakan kontroler sebagai pengatur perpinahan posisi motor DC untuk mendapatkan gerak luaran mendekati referensi. Pengaturan ini dapat dilakukan dengan adaptasi kontroler PID (Proportional Integral Derivative).
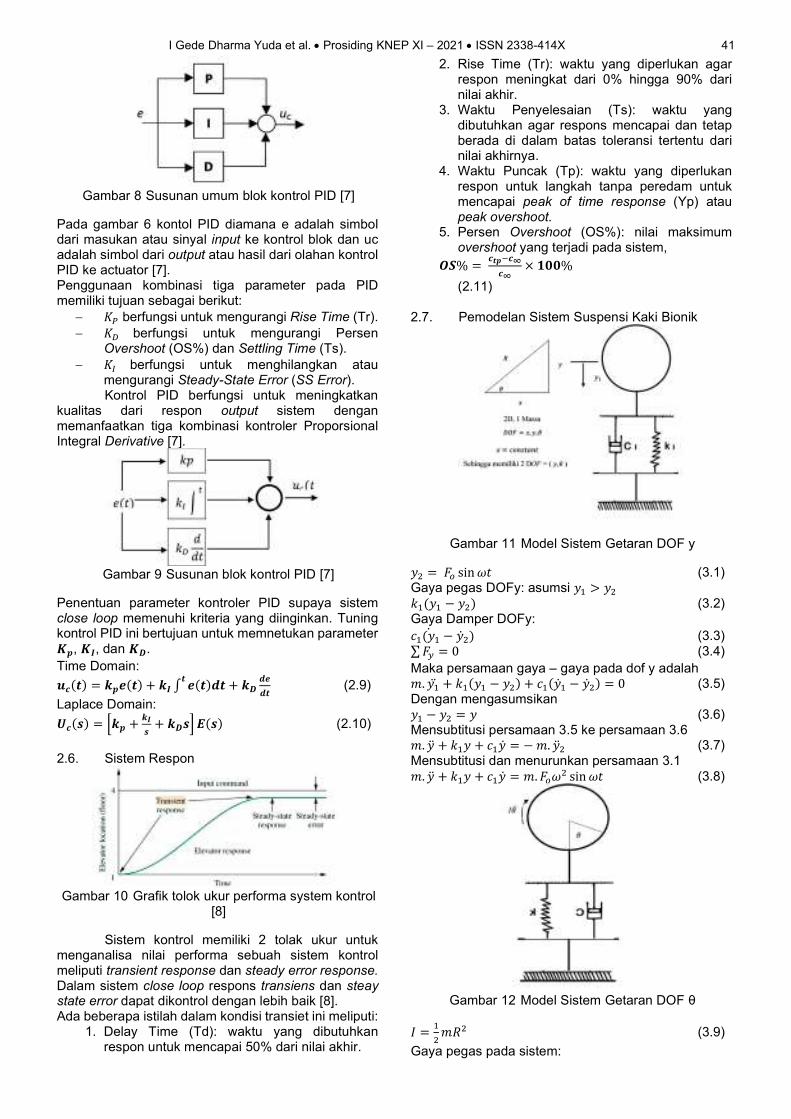
I Gede Dharma Yuda et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 41
Gambar 8 Susunan umum blok kontrol PID [7]
Pada gambar 6 kontol PID diamana e adalah simbol dari masukan atau sinyal input ke kontrol blok dan uc adalah simbol dari output atau hasil dari olahan kontrol PID ke actuator [7]. Penggunaan kombinasi tiga parameter pada PID memiliki tujuan sebagai berikut:
- berfungsi untuk mengurangi Rise Time (Tr).
- berfungsi untuk mengurangi Persen Overshoot (OS%) dan Settling Time (Ts).
- berfungsi untuk menghilangkan atau mengurangi Steady-State Error (SS Error). Kontrol PID berfungsi untuk meningkatkan
kualitas dari respon output sistem dengan memanfaatkan tiga kombinasi kontroler Proporsional Integral Derivative [7].
Gambar 9 Susunan blok kontrol PID [7]
Penentuan parameter kontroler PID supaya sistem close loop memenuhi kriteria yang diinginkan. Tuning kontrol PID ini bertujuan untuk memnetukan parameter
, , dan .
Time Domain:
(2.9)
Laplace Domain:
(2.10)
2.6. Sistem Respon
Gambar 10 Grafik tolok ukur performa system kontrol
[8]
Sistem kontrol memiliki 2 tolak ukur untuk menganalisa nilai performa sebuah sistem kontrol meliputi transient response dan steady error response. Dalam sistem close loop respons transiens dan steay state error dapat dikontrol dengan lebih baik [8]. Ada beberapa istilah dalam kondisi transiet ini meliputi:
1. Delay Time (Td): waktu yang dibutuhkan respon untuk mencapai 50% dari nilai akhir.
2. Rise Time (Tr): waktu yang diperlukan agar respon meningkat dari 0% hingga 90% dari nilai akhir.
3. Waktu Penyelesaian (Ts): waktu yang dibutuhkan agar respons mencapai dan tetap berada di dalam batas toleransi tertentu dari nilai akhirnya.
4. Waktu Puncak (Tp): waktu yang diperlukan respon untuk langkah tanpa peredam untuk mencapai peak of time response (Yp) atau peak overshoot.
5. Persen Overshoot (OS%): nilai maksimum overshoot yang terjadi pada sistem,
(2.11) 2.7. Pemodelan Sistem Suspensi Kaki Bionik
Gambar 11 Model Sistem Getaran DOF y
(3.1) Gaya pegas DOFy: asumsi
(3.2) Gaya Damper DOFy:
(3.3) (3.4)
Maka persamaan gaya – gaya pada dof y adalah (3.5)
Dengan mengasumsikan (3.6)
Mensubtitusi persamaan 3.5 ke persamaan 3.6 (3.7)
Mensubtitusi dan menurunkan persamaan 3.1
(3.8)
Gambar 12 Model Sistem Getaran DOF θ
(3.9)
Gaya pegas pada sistem:

I Gede Dharma Yuda et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 42
(3.10) Gaya damper pada sistem:
(3.11) Maka persamaan getaran DOF- adalah
(3.12)
(3.13) 2.8. Alat dan Bahan
Alat dan bahan yang digunakan pada penelitian kali ini meliputi:
1. Komputer 2. Autodesk Inventor 2018 3. Matlab/Simulink 2020a
2.9. Prosedur Penelitian
Pada penelitian kali adapun prosedur yang dilakukan sebagai berikut:
1. Desain 3D Sistem Kaki Bionik 2. Import File Desain 3D 3. Penyesuaian Sistem Mekanis pada
Matlab/Simulink 4. Perancangan dan Penyesuaian Kontrol PID
pada Simulasi 5. Simulasi 6. Analisa Data
2.10. Diagram Alir Penlitian
Gambar 13 Diagma alir Penelitian
2.11. Metode Simulasi Pemodelan servo motor DC dalam sistem
tanpa kontrol disusun seperti gambar 14 dibawah ini.
Gambar 14 Gambar Simulasi Sistem Tanpa Kontrol
Penyesuaian nilai variable dalam simulasi mengacu denga sistem motor DC dan juga merujuk pada beberapa sumber yang mendukung nilai variable saat simulasi.
Gambar 15 Model Blok Diagram Simulasi PID
Blok simulasi pada gambar 15 merupakan blok simulasi kaki bionik dengan kontrol PID terlihat pada gambar. Dimana kontrol PID akan menyesuaikan sinyal masuk nya terlebih dulu sebelum diproses pada transfer function. 2.12. Kontrol PID Simulasi
Penentuan kombinasi PID kontrol pada simulasi menggunakan auto tune dengan menggunakan blok PID tuner pada Matlab/Simulink.
Gambar 16 Nilai PID hasil pengaturan PID Tuner App
Kombinasi nilai-nilai kontrol PID yang digunakan P≈22,762, I≈43,609, D≈2,568, dan N≈7254,943 2.13. Analisa Data
Pada tahap simulasi menggunakan Matlab untuk mengoperasikan dan mensimulasikan sistem Kaki Bionik. Visualisai untuk model kaki bionik mengggunakan Autodesk Inventor 2018 dan menggunakan Matlab/Simulink 2020a untuk software dan dengan kontrol PID. Beberapa Variabel bebas yang digunakan pada penelitian kali ini adalah Kontrol PID dan Tanpa Kontrol pada Kaki Bionik.
3. Hasil dan Pembahasan
3.1. Simscape Multibody Matlab/Simulink
Gambar 17 Posisi Stance Kaki Bionik

I Gede Dharma Yuda et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 43
3.2. Pengumpulan Data dan Analisis
Gambar 18 Simulasi No Control 0°-60°
Dapat dilihat pada grafik bahwa nilai posisi no control mengalami kenaikan setelah kisaran waktu 1 s dan untuk sampai pada keadaan steady state membutuhkan waktu 6.84s. Memliki steady state error 4.10685 derajat dari sudut referensi atau sebesar 6.85% dan memiliki maximum overshoot 64.10683 derajat atau sebesar 6.85%.
Gambar 19 Simulasi No Control 60°-0°
Dapat dilihat pada grafik bahwa nilai posisi no control mengalami penurunan setelah kisaran waktu 1 s dan untuk sampai pada keadaan steady state membutuhkan waktu 6.84s. Memliki steady state error 4.10685 derajat dari sudut referensi atau sebesar 6.85% dan memiliki maximum overshoot -4.10683 derajat atau sebesar 6.85%.
Tabel 1 Hasil Simulasi Tanpa Kontrol
No Parameter
Simulasi Tanpa
Kontrol
0-60 60-0
1 Maximum
Overshoot (%) 6.85% 6.85%
2 Steady State
Error(%) 6.85% 6.85%
3 Settle Time 5.84 5.84
Gambar 20 Simulasi PID 0°-60°
Dapat dilihat pada grafik bahwa nilai posisi PID mengalami kenaikan setelah kisaran waktu 1s dan untuk sampai pada keadaan steady state membutuhkan waktu 4.64s. Memliki steady state error 0.8167 derajat dari sudut referensi atau sebesar 1.36% dan memiliki maximum overshoot 61.306 derajat atau sebesar 2.18%.
Gambar 21 Simulasi PID 60°-0°
Dapat dilihat pada grafik bahwa nilai posisi PID mengalami kenaikan setelah kisaran waktu 1s dan untuk sampai pada keadaan steady state membutuhkan waktu 4.64s. Memliki steady state error 0.6941 derajat dari sudut referensi atau sebesar 1.16% dan memiliki maximum overshoot -1.183 derajat atau sebesar 1.97%.
Tabel 2 Hasil Simulasi Kontrol PID
No Parameter
Simulasi Kontrol
PID
0-60 60-0
1 Maximum
Overshoot (%) 2.18% 1.97%
2 Steady State
Error(%) 1.36% 1.16%
3 Settle Time 3.64 3.64
4. Simpulan
Kesimpulan dari penelitian ini merujuk pada rumusan masalah yang telah dipaparkan meliputi kontrol PID

I Gede Dharma Yuda et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 44
mampu mengurangi overshoot, steady state error, dan settle time servo motor DC kaki bionik.
No Parameter Tanpa Kontrol
Kontrol PID
1 Maximum Overshoot (%)
6.85% 2.59%
2 Steady State Error(%)
6.85% 1.77%
3 Settle Time 5.84 3.64
Daftar Pustaka [1] Irwanto, E. Rahmi Kasim, A. Fransiska, M. Lusli,
and O. Siradj, “Analisis Situasi Penyandang Disabilitas Di Indonesia : Sebuah Desk-Review,” Pus. Kaji. Disabil., 2010, doi: 10.5694/j.1326-5377.1981.tb135719.x.
[2] R. Bogue, “Robots in healthcare,” Ind. Rob., vol. 38, no. 3, pp. 218–223, 2011, doi: 10.1108/01439911111122699.
[3] L. Wang, S. Chai, D. Yoo, L. Gan, and K. Ng, PID and Predictive Control of Electrical Drives and Power Converters using MATLAB®/Simulink®. 2015.
[4] J. Perry, Gait, vol. 159. 2010. [5] T. Coglitore, I. W. Widhiada, and I. M. Widiyarta,
“Perancangan Sistem Kontrol Hybrid pada Prototype Kaki Bionik Berbasis Matlab / Simulink Tamara Coglitore , I Wayan Widhiada , I Made Widiyarta,” vol. 8, no. 3, pp. 3–6, 2019.
[6] N. Amalia, E. S. Nugraha, and M. A. Amanaf, “Open Loop and Closed Loop Power Control Analysis on LTE,” J. Infotel, vol. 10, no. 4, p. 195, 2018, doi: 10.20895/infotel.v10i4.399.
[7] M. A. Johnson and M. H. Moradi, PID Control New Identification and Design Methods. 2005.
[8] N. Nise et al., Apago PDF Enhancer A ntenna A zimuth P osition C ontrol S ystem, vol. 517. 2011.
I Gede Dharma Yuda menyelesaikan
studi S1 di Universitas Udayana, pada
tahun 2021, Bidang konsentrasi yang
diminati adalah Rekayasa Manufaktur
dan Sistem Kontrol.
Topik yang diangkat dalam tugas akhir/
skripsi adalah perancangan robotika
berupa Kaki Bionik dengan sistem
kontrol PID.

Prosiding Konferensi Nasional Engineering Perhotelan XI, Universitas Udayana - 2021
ISSN 2338-414X
*Korespondensi: Tel./Fax.: 085954622802 / - E-mail: [email protected]
ÓTeknik Mesin Universitas Udayana 2021
PENGGUNAAN ROUNDING PADA FRONT HOOD TERHADAP DISTRIBUSI
TEKANAN STATIS PADA KENDARAAN MODEL
A. A. Pusaka Jaya A. P.1), A. A. Adhi Suryawan2), I Gusti Ketut Sukadana3) 1,2,3)Jurusan Teknik Mesin Universitas Udayana, Kampus Bukit Jimbaran Bali
Abstrak Distribusi tekanan statis yang terjadi pada sebuah bodi kendaraan akan dipengaruhi aliran eksternal yang melintasinya. Fenomena lapisan batas fluida yang nantinya mempengaruhi pola aliran dan distribusi tekanan statis pada kendaraan tanpa rounding akan berbeda dengan kendaraan dengan rounding. Fenomena tersebut juga akan mempengaruhi fluktuasi distribusi tekanan yang terjadi sepanjang permukaan bodi kendaraan. Penelitian ini bertujuan mempelajari pengaruh rounding pada front hood kendaraan terhadap distribusi tekanan statis pada upper side kendaraan model. Model kendaraan yang sama digunakan dengan variasi tanpa rounding, dengan rounding 200 mm, dengan rounding 400 mm dan dengan rounding 600 mm. Model kendaraan di uji pada wind tunnel dengan kecepatan 5,47m/s. Semua model kendaraan uji menunjukkan mengalami nilai Cp (koefisien tekanan) maksimal pada rasio x/l=0 tetapi dengan fluktuasi yang berbeda, fenomena tersebut disebabkan oleh faktor bentuk front hood kendaraan. Pada model kendaraan dengan rounding 200 mm, 400 mm, dan 600 mm terjadi peningkatan nilai Cp mencapai nilai positif pada rasio x/l=0,21 sampai rasio x/l=0,39. Pada model kendaraan tanpa rounding, nilai Cp terendah terjadi pada rasio x/l=0,03 dan rasio x/l=0,43. Pada model kendaraan dengan rounding 200 mm, 400 mm dan 600 mm terjadi nilai Cp terendah pada rasio x/l=0,43. Kata kunci: rounding, kontur bodi dan koefisien tekanan
Abstract The static pressure distribution on car body is influenced by external flows that crossed it. Fluid boundary layer phenomena which in turn affecting airflow pattern and static pressure distribution on a car without rounding is difference than a car with rounding. This phenomenon will also affect pressure distribution fluctuations that occur along the surface of the car body. The aim of this research is to investigate effect of front hood rounding on static pressure distribution along the contour surface of the car. The same car model was used with variation without rounding, a rounding of 200 mm, a rounding of 400 mm and a rounding of 600 mm. The car models were tested in wind tunnel with a speed of 5.47 m/s. All car models shown experienced a maximum Cp (pressure coefficient) value test at a ratio of x/l = 0 but with different fluctuations, this phenomenon which caused by form factor of the car’s front hood. On car models with a rounding of 200 mm, 400 mm, and 600 mm, there is an increase in the value of Cp, reaching a positive value at a ratio of x/l = 0,21 to a ratio of x/l = 0,39. On the car model without rounding, the lowest Cp value occurs at the ratio x/l = 0,03 and the ratio x/l = 0,43. On a car model with a rounding of 200 mm, 400 mm and 600 mm, the lowest Cp value occurs at the ratio x/l = 0,43. Key words: rounding, body contour and pressure coefficient
1. Pendahuluan
Kendaraan sudah sebagai sarana transportasi dengan status hampir menjadi kebutuhan pokok bagi setiap orang. Kendaraan tentunya terdiri dari berbagai jenis bentuk dan golongannya, seperti kendaraan roda dua, kendaraan roda empat dan kendaraan berat. Kendaraan roda empat menjadi sarana transportasi yang sangat mendukung dalam menunjang kegiatan aktivitas manusia, dimana kendaraan tersebut pada umumnya dapat memberikan perlindungan yang lebih dari kendaraan roda dua seperti dari hujan, sinar matahari dan perubahan cuaca lainnya [1]. Berbicara tentang kendaraan roda empat adapun komponen-komponen sistem yang menunjang kendaraan tersebut antara lain seperti komponen sistem mekanisme mesin, komponen sistem kontrol elektronik (Electronic Control Unit), komponen sistem pemindah daya serta komponen sistem rangka dan bodi kendaraan. Bentuk desain dari suatu bodi kendaraan juga dikembangkan sedemikian rupa untuk menghasilkan karakteristik
aliran fluida yang berbeda-beda dan sangat berpengaruh terhadap keindahan, kenyamanan dan keamanan dalam berkendara. Fenomena aerodinamis pada kendaraan disebabkan oleh adanya gerakan relatif udara di sepanjang bodi kendaraan sehingga aliran eksternal yang melintasi bodi tersebut akan mempengaruhi fenomena aliran yang terjadi. Front Hood pada mobil berperan sangat penting saat menerima (frontal pressure) yang disebabkan oleh tekanan aliran udara di bagian depan mobil [2]. Sehingga besarnya kelengkungan jari-jari pembulatan bagian depan front hood selanjutnya akan mempengaruhi distribusi tekanan statis pada
kendaraan dari front area sampai rear area. Berdasarkan data-data diatas, maka penelitian ini dilakukan penulis untuk mengetahui distribusi tekanan statis yang terjadi sepanjang permukaan kontur bodi akibat dari pembulatan bagian ujung depan mobil dan bentuk depan mobil, dengan parameter-parameter yang mempengaruhi dalam hal ini dipilih pembulatan
A. A. Pusaka Jaya A. P. et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 46
pada front hood kendaraan dengan variasi jari-jari kelengkungan penggunaan rounding.
Dalam hal ini maka ada beberapa permasalahan yang akan dikaji, yaitu: 1. Bagaimana distribusi tekanan statis pada upper side
model kendaraan uji, tanpa dan dengan penggunaan rounding. Beberapa batasan ditetapkan dalam penelitian ini
meliputi : 1. Model kendaraan uji adalah kendaraan tanpa dan
dengan penggunaan rounding front hood sudut kelengkungan r (jari-jari) 200 mm, 400 mm dan 600 mm.
2. Kecepatan udara di wind tunnel pada test section ditentukan konstan 5,47 m/s.
3. Titik pengukuran tekanan sebanyak 35 titik pada setiap model kendaraan uji.
4. Fluida yang mengalir adalah udara yang di asumsikan dalam kondisi steady state, steady flow, incompressible flow dan uniform pada sisi up stream.
5. Distribusi tekanan statis di ambil dari titik leading edge sampai titik trailing edge bodi kendaraan uji pada bagian upper side.
6. Temperatur udara pada ruang pengujian dijaga konstan
2. Metode Penelitian
2.1. Prinsip Bernoulli
Prinsip Bernoulli menyatakan semakin tinggi kecepatan fluida untuk ketinggian yang relatif sama maka, tekanannya akan mengecil [3]. Persamaan bernoulli pada aliran incompressible untuk sepanjang streamline dapat dituliskan sebagai berikut :
P
ρ+
V2
2konstan (1)
Bila tekanan statis (P) pada suatu titik dalam suatu
aliran dimana kecepatan adalah V, maka tekanan stagnasi ( Po) , dimana kecepatannya adalah nol,
sehingga :
P0= P∞+ 1
2 ρ V
2 (2)
Keterangan : P∞ = Tekanan statis free stream (N/m2) Po = Tekanan stagnasi (N/m2)
ρ = Densitas fluida (kg/m3) V = Kecepatan fluida (m/s)
2.2. Tekanan Statis
Tekanan statis adalah tekanan termodinamika aktual dari fluida ketika mengalir. Secara umum tekanan statis dapat dirumuskan sebagai berikut:
P = ρ. g . h (3)
Adapun persamaan umum untuk memperoleh nilai tekanan udara pada inclined tube manometer :
Pu = ρu.g
Sgm.hm
Sgu (4)
Keterangan : hm = L sin θ (m).
ρu = Masa jenis udara (kg/m3).
Sgm = Specific gravity minyak.
Sgu = Specific gravity udara.
g = Percepatan gravitasi (m/s2)
Inclined Tube Manometer merupakan suatu alat yang berfungsi untuk mengukur kecepatan aliran udara yang ditentukan dengan perbandingan antara tekanan total dan tekanan statis yang dihasilkan oleh udara yang melalui Inclined Tube Manometer [4].
2.3. Tekanan Dinamis
Tekanan dinamis dapat dikatakan sebagai peningkatan tekanan fluida yang bergerak di atas nilai statis,dimana disebabkan gerakan fluida [5]. Tekanan dinamis definisikan :
q = 12
ρ V2 (6)
Keterangan :
q = Tekanan dinamis (N/m2) ρ = Densitas fluida (kg/m3)
V = Kecepatan udara (m/s)
2.4. Koefisien Tekanan
Menurut John D. Anderson,2005 koefisien tekanan ( Cp ) merupakan selisih antara tekanan statis pada
kontur lokal dengan tekanan statis free stream dibagi dengan tekanan dinamis pada free stream [6]. Secara umum persamaan koefisien tekanan adalah sebagai berikut :
Cp= Pc - P∞
q (6)
Keterangan :
Cp = Koefisien tekanan
Pc = Tekanan statis pada kontur bodi (N/m2) P∞ = Tekanan statis free stream (N/m2)
q = Tekanan dinamis free stream (N/m2)
2.5. Deskripsi Penelitian
Penelitian ini merupakan penelitian eksperimental untuk menganalisa distribusi tekanan statis sepanjang kontur bodi kendaraan akibat dari penggunaan rounding yang divariasikan. Model kendaraan uji adalah model kendaraan tipe sedan, tanpa dan dengan penggunaan rounding pada front hood sebesar 200 mm, 400 mm dan 600 mm. Pada setiap model kendaraan uji terdapat 35 buah titik pengukuran tekanan sepanjang kontur bodi.
Adapun variabel yang akan diamati dan diukur dalam pengujian ini adalah: variabel bebas yaitu model kendaraan uji, tanpa dan dengan penggunaan rounding 200 mm, 400 mm dan 600 mm. Untuk variabel terikat yaitu tekanan statik freestream, tekanan dinamis freestream, tekanan statik pada kontur bodi. Sedangkan variabel control yaitu kecepatan aliran udara di test section konstan 5,47 m/s dan temperatur udara pada test section di jaga konstan.

A. A. Pusaka Jaya A. P. et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 47
Spesimen uji pada penelitian ini adalah sebagai berikut :
Gambar 1. Model kendaraan tanpa rounding
Gambar 2. Model kendaraan dengan rounding 200
mm
Gambar 3. Model kendaraan dengan rounding 400
mm
Gambar 4. Model kendaraan dengan rounding 600
mm
Proses pengolahan data pada penelitian ini adalah dengan memperoleh data kecepatan udara pada wind tunnel, temperatur udara pada wind tunnel dan perubahan cairan pada inclined tube manometer. Gambar 5 dan 6 berturut-turut menunjukkan bagian gambar peralatan pengujian secara lengkap.
Gambar 5. Unit wind tunnel
Gambar 6. Test section pada wind tunnel
dan inclined tube manometer
Keterangan : 1. Blower merupakan salah satu komponen dari wind
tunnel yang berfungsi menghailkan aliran bebas (free stream).
2. Venturi merupakan komponen wind tunnel yang berfungsi memusatkan aliran udara yang menuju honeycomb dan menambah kecepatan udara yang dihasilkan blower.
3. Test section merupakan salah satu komponen wind tunnel yang berfungsi sebgai tempat pengujian spesimen uji.
4. Diffuser merupakan salah satu komponen wind tunnel yang berfungsi untuk meningkatkan tekanan dan menurunkan kecepatan udara.
5. Sarang lebah (honeycomb) merupakan komponen wind tunnel yang berfungsi untuk membuat aliran yang datang dari venturi menjadi aliran yang seragam (uniform).
6. Inclined tube manometer merupakan alat ukur yang di gunakan untuk mengukur tekanan udara pada kontur bodi kendaraan model.
7. Spesimen uji merupakan benda atau objek yang di teliti di wind tunnel, dalam penelitian ini spesimen ujinya adalah kendaraan model.
3. Hasil dan Pembahasan
Dari hasil penelitian diperoleh data dan dapat dibuat grafik sebagai berikut :
3.1. Grafik Cp Pada Kendaraan Model Tanpa Rounding
Gambar 7. Grafik Cp kendaraan model tanpa rounding
Pada gambar 7 di front area yaitu pada titik stagnasi
(stagnation point) terjadi fenomena forward bound vortex yang dibuktikan dengan nilai Cp pada front area atau rasio x/l = 0 tidak semua 1. Selanjutnya pada terjadi fenomena separasi pada aliran dengan nilai Cp = -1 dimana pada rasio x/l = 0,03 atau pada titik pengukuran 8, hal ini terjadi diakibatkan forward bound vortex yang terjadi pada front area. Tumpulnya bidang front area menyebabkan terjadinya forward bound vortex dan separasi yang terlalu awal, dan karena kurang aerodinamisnya bentuk kendaraan menyebabkan aliran tidak mampu lagi mengalami re-attachment.
Rendahnya nilai Cp yang signifikan dari titik pengukuran 8 sampai titik pengukuran 15 mengindikasikan tingginya kecepatan aliran udara yang diakibatkan oleh terjadinya separasi aliran. Setelah titik pengukuran 15 atau pada rasio x/l = 0,24 nilai Cp mengalami peningkatan kearah positif sampai pada titik pengukuran 19 dengan nilai Cp = -0,10 , fenomena tersebut mengindikasikan aliran udara kembali mendekat ke permukaan bodi. Meningkatnya nilai Cp

A. A. Pusaka Jaya A. P. et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 48
maka akan terjadi penurunan kecepatan (deacceleration). Nilai Cp kembali mengalami penurunan pada titik pengukuran 20 sampai titik pengukuran 21 yaitu dengan nilai Cp = -1 dan kembali mengalami peningkatan kearah positif dari rasio x/l= 0,57 atau pada titik pengukuran 23 sampai pada titik pengukuran 32.
Selanjutnya pada rear area yaitu pada titik pengukuran tekanan dari titik pengukuran 33 sampai titik pengukuran 35, nilai Cp di area tersebut mengalami peningkatan kearah positif namun tidak signifikan dimana nilai Cp = -0,43 .Dengan nilai Cp yang negatif membuat di daerah tersebut terjadi fenomena wake pada pola aliran udara di bagian belakang. Semakin rendahnya nilai Cp akan menyebabkan semakin besarnya kevakuman yang terjadi pada area tersebut yang dapat menambah gaya hambat pada kendaraan.
3.2. Grafik Cp Pada Kendaraan Model Dengan Rounding 200 mm
Gambar 8. Grafik Cp kendaraan model dengan
rounding 200 mm
Pada gambar 8 di front area yaitu pada titik stagnasi (stagnation point) terjadi fenomena forward bound vortex yang dibuktikan dengan nilai Cp pada front area atau rasio x/l = 0 tidak semua 1. Titik stagnasi terjadi pada titik pengukuran 3 atau rasio y/h = 0,27 sampai titik pengukuran 4 atau rasio y/h = 0,36 pada rasio x/l = 0 yang dibuktikan dengan nilai Cp = 1. Selanjutnya terjadi penurunan nilai Cp kearah negatif dari titik pengukuran 5 sampai titik pengukuran 10 atau pada rasio x/l = 0,09 dengan nilai Cp = -0,87. Fenomena tersebut mengindikasikan aliran udara menjauh dari permukaan bodi.
Kemudian nilai Cp mengalami peningkatan pada titik pengukuran 11 atau rasio x/l = 0,12 sampai nilai Cp maksimal yaitu pada titik pengukuran 18 atau rasio x/l = 0,33 dengan nilai Cp = 0,43. Dengan meningkatnya nilai Cp maka akan terjadi penurunan kecepatan (deacceleration) pada aliran udara. Nilai Cp kembali mengalami penurunan kearah negatif pada titik pengukuran 19 sampai pada titik pengukuran 21 yang merupakan nilai Cp terendah dengan nilai Cp = -1,09. Fenomena tersebut mengindikasikan terjadinya separasi aliran pada bodi kendaraan. Dengan menurunnya nilai Cp maka terjadi peningkatan kecepatan udara (acceleration) pada daerah tersebut. Selanjutnya nilai Cp mengalami peningkatan kearah positif dari titik pengukuran 22 sampai titik pengukuran 35.
Nilai Cp pada rear area yaitu pada titik pengukuran 33 sampai titik pengukuran 35 mengalami peningkatan
kearah positif, terjadinya peningkatan nilai Cp maka aliran udara pada kontur kembali mengalami penurunan kecepatan (deacceleration) dan mendekat ke permukaan bodi kendaraan. Fenomena tersebut akan menyebabkan wake yang terjadi di rear area semakin kecil.
3.3. Grafik Cp Pada Kendaraan Model Dengan Rounding 400 mm
Gambar 9. Grafik cp kendaraan model dengan
rounding 400 mm
Pada gambar 9 di front area dimana terdapat nilai Cp maksimal yaitu Cp = 1 yang terjadi pada titik stagnasi yaitu pada titik pengukuran 3 pada rasio x/l = 0. Pada titik tersebut merupakan titik dimana nilai tekanan aliran udara maksimal, dan kecepatan udara adalah = 0 m/s. Nilai Cp pada rasio x/l = 0 tidak semua = 1 diakibatkan adanya feomena forward bound vortex di front area. Setelah titik stagnasi nilai Cp mengalami penurunan kearah negatif sampai pada titik penurunan maksimal yaitu pada titik pengukuran 10 atau rasio x/l = 0,09. Menurunnya nilai Cp ini mengindikasikan terjadinya peningkatan kecepatan aliran udara (acceleration) dan menurunya nilai tekanan statik pada kontur bodi.
Nilai Cp mengalami peningkatan kearah positif dari titik pengukuran 11 sampai pada peningkatan nilai Cp maksimal terjadi pada titik pengukuran 18 dengan nilai Cp = 0,43. fenomena tersebut mengindikasikan aliran udara kembali mendekat ke permukaan bodi dan terjadinya fenomena blockage mass. Kemudian nilai Cp mengalami penurunan dari titik pengukuran 19 sampai titik pengukuran 21 atau rasio x/l = 0,43 , dengan nilai Cp terendah yaitu Cp = -1,22. Pada titik ini adalah titik dimana kecepatan udara dengan nilai kecepatan tertinggi dan mengindikasikan aliran udara yang menjauh dari permukaan bodi sehingga akan menyebabkan fenomena separasi aliran.
Selanjutnya pada titik pengukuran 22 nilai Cp mengalami peningkatan kearah positif sampai kenaikan Cp maksimal yaitu dengan Cp = -0,21 pada titik pengukuran 35. Peningkatan nilai Cp kearah positif mengidikasikan aliran udara pada kontur kembali mengalami penurunan kecepatan (deacceleration) dan mendekat ke permukaan bodi kendaraan.

A. A. Pusaka Jaya A. P. et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 49
3.4. Grafik Cp Pada Kendaraan Model Dengan Rounding 600 mm
Gambar 10. Grafik cp kendaraan model dengan
rounding 600 mm
Pada gambar 10 nilai Cp maksimal yaitu Cp = 1 terjadi pada titik stagnasi yaitu pada titik pengukuran 2 pada rasio x/l = 0. Pada titik-titik tersebut merupakan titik dimana nilai tekanan aliran udara maksimal, dan kecepatan udara adalah = 0 m/s. Nilai Cp pada rasio x/l = 0 tidak semua 1, diakibatkan masih terdapatnya feomena forward bound vortex di front area. Selanjutnya nilai Cp mengalami penurunan dari titik pengukuran 3 sampai titik pengukuran 10 dengan nilai Cp = 1. Menurunnya nilai Cp maka terjadi penurunan tekanan statik pada kontur dan kecepatannya aliran udara megalami peningkatan (acceleration).
Kemudian nilai Cp mengalami peningkatan dari titik pengukuran 11 sampai nilai Cp maksimal pada titik pengukuran 18 dengan nilai Cp = 0,30, fenomena tersebut mengindikasikan aliran udara kembali mendekat ke permukaan bodi dan terjadinya fenomena blockage mass. Kemudian nilai Cp mengalami penurunan dari titik pengukuran 19 sampai titik pengukuran 21 atau rasio x/l = 0,43 , dimana pada titik ini terjadi percepatan udara maksimal dengan nilai Cp terendah yaitu Cp = -1,22. Pada titik ini adalah titik dimana kecepatan udara dengan nilai kecepatan maksimal dan tekanan statik terendah pada kontur bodi sehingga menyebabkan fenomena separasi aliran.
Setelah titik pengukuran 21 nilai Cp mengalami peningkatan kearah positif. Nilai Cp mulai stabil dari titik pengukuran tekanan 23 sampai dengan titik pengukuran 26, kemudian nilai Cp kembali mengalami peningkatan kearah positif dengan nilai Cp maksimal = -0,21 yaitu pada titik pengukuran 35. Nilai Cp yang semakin besar pada rear area yaitu pada titik pengukuran 33 sampai titik pengukuran 35 akan mengidikasikan aliran udara yang semakin mendekat ke permukaan bodi sehingga akan meminimalisasi fenomena wake yang terjadi.
3.5. Analisa Grafik Cp Yang Digabung
Gambar 11. Grafik Cp yang di gabungkan
Gambar 11 adalah gambar distribusi koefisien tekanan yang di gabungkan menjadi 1 grafik, dari grafik dapat dilihat bahwa semakin besar penggunaan rounding maka nilai Cp akan semakin menurun pada daerah front area kendaraan model sehingga menyebabkan rendahnya tekanan statik yang terjadi pada kontur bodi di front area dan akan semakin mengurangi pressure drag yang terjadi. Fluktuasi nilai Cp pada kendaraan dengan rounding 600 mm lebih landai daripada model kendaraan tanpa rounding, dengan rounding 200 mm dan dengan rounding 400 mm. Fenomena tersebut disebabkan oleh bentuk bodi bagian depan yang lebih aerodinamis sehingga aliran lebih mampu untuk mengikuti kontur dari bodi.
4. Simpulan
Distribusi tekanan statis udara pada kontur bodi kendaraan sangat mempengaruhi pola aliran udara yang melintasi bodi. Semakin besar penggunaan rounding akan mengurangi forward bound vortex yang terjadi sehingga pressure drag dapat berkurang. Besarnya penggunaan rounding juga akan mempengaruhi nilai Cp pada blockage mass, dimana semakin rendah nilai Cp pada blockage mass akan menyebabkan fluktuasi Cp yang lebih stabil menuju rear area, serta memperkecil perbedaan tekanan antara di titik stagnasi dengan daerah wake.
Ucapan Terimakasih Penulis ucapkan terimakasih kepada Bapak dosen pembimbing I dan II pada penelitian ini, Bapak Anak Agung Adhi Suryawan dan Bapak I Gusti Ketut Sukadana, serta Bapak dan Ibu dosen yang lain di Program Studi Teknik Mesin Universitas Udayana. Daftar Pustaka [1] Bruce R. Munson, (2010), Fundamental Of Fluid
Mechanics, Six Edition, John Wiley and Sons, Inc.
[2] Cahyaningsih Wilujeng, (2016), “Studi Eksperimen Karakteristik Aliran Melintasi Silinder Sirkular Berpengganggu Prisma Segitiga Samasisi, Prisma Segi Empat, dan Silinder Sirkular”, Tugas Akhir Jurusan Teknik Mesin Fakultas Teknologi Industri Insitut Teknologi Sepuluh November, Surabaya.
[3] Rachmat Subagyo, Aqli Mursadin, (2017), “Buku Ajar Mekanika Fluida II” Teknik Mesin Fakultas Teknik Universitas Lambung Mangkurat.

A. A. Pusaka Jaya A. P. et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 50
[4] White, F.M, (1998), Fluid Mechanics, USA,
McGraw-Hill.
[5] Hermann Schlichting, (1968), Boundary Layer Theory, McGraw-Hill, Series In Mechanical Engineering.
[6] Jhon D. Anderson, Jr, (2005), Fundamental Of Aerodynamic, Fifth Edition, McGraw-Hill, International Edition.
Anak Agung Pusaka Jaya Adi Putra menyelesaikan pendidikan S1 Teknik Mesin di Universitas Udayana pada tahun 2021. Ia mengambil judul penelitian Penggunaan Rounding Pada Front Hood Terhadap Distribusi Tekanan Statis Pada Kendaraan Model.
Topik penelitian yang diminati adalah bidang konversi energi khususnya mekanika fluida dan aerodinamika.

Prosiding Konferensi Nasional Engineering Perhotelan XI, Universitas Udayana - 2021
ISSN 2338-414X
*Korespondensi: Tel./Fax.: - E-mail: [email protected]
ÓTeknik Mesin Universitas Udayana 2021
PERANCANGAN SISTEM KONTROL FUZZY MENGGUNAKAN MATLAB/SIMULINK PADA KAKI BIONIK
William Agung Primantara 1), I Wayan Widhiada 2), I Gusti Ngurah Nitya Santhiarsa 3) 1,2,3)Jurusan Teknik Mesin Universitas Udayana, Kampus Bukit Jimbaran Bali
Abstrak
Disabilitas adalah seseorang yang mempunyai keterbatasan fisik, intelektual, mental maupun sensorik dalam waktu lama. Karena itu diperlukan alat yang dapat membantu disabilitas dalam beraktifitas sehari-hari. Salah satu alat yang penulis kembangkan adalah kaki bionik dengan Fuzzy Control. Kaki bionik merupakan alat yang diperuntukan untuk penyadang disabilitas kaki. Kaki bionik akan dipasangkan electrical signal (EMG) untuk menerima sinyal otot melalui paha pengguna dan akan dihubungkan ke arduino. pemograman akan dilakukan dengan Matlab/Simulink sehingga dapat menggerakan motor DC dari 0° - 60° dan sebaliknya. Dari hasil simulasi fuzzy control didapatkan bahwa maximum overshoot adalah 1,14%, settle time sebesar 3,36 s dan steady state error sebesar 1,138% . Dalam eksperimen fuzzy control didapatkan bahwa maximum overshoot adalah 1,997% , steady state error sebesar 0,801% dan settle time sebesar 2,2 s .
Kata kunci: Fuzzy, Simulink, Inventor, Arduino, Servo
Abstract
Disability is someone who has had physical, intellectual, mental or sensory limitations for a long time. Because of that, a tool is needed to help people with disabilities in their daily activities. One of the tools that the author has developed is the bionic leg with Fuzzy Control. Bionic leg is a tool intended for people with leg disabilities. The bionic leg will be attached with an electrical signal (EMG) to receive muscle signals through the user's thigh and will be connected to the arduino. programming will be carried out with Matlab / Simulink so that it can drive the DC motor from 0 ° - 60 ° and vice versa. From the fuzzy control simulation results, it is found that the maximum undershoot is 1,14%, the settle time is 3,36 s and the steady state error is 1,138%. In the fuzzy control experiment, it was found that the maximum undershoot was 1,997%, the steady state error was 0,801% and the settle time was 2,2 s.
Keywords: Fuzzy, Simulink, Inventor, Arduino, Servo
1. Pendahuluan
Disabilitas adalah kondisi seseorang yang memiliki keterbatasan fisik, intelektual, mental atau indrawi dalam waktu yang lama [1]. Bionic leg merupakan salah satu alat alternatif untuk membantu penyandang disabilitas, khususnya pada ekstremitas bawah, untuk mendukung aktivitas sehari-hari. Pada penelitian sebelumnya pengerjaan dilakukan dengan menggunakan 2 buah motor DC pada bagian lutut dan mata kaki, sekarang penulis membuat rancangan dengan 1 buah motor DC pada bagian lutut dan 1 buah pegas pada bagian mata kaki.
Dalam merancang kaki bionik, penulis menggunakan Inventor Autodesk sebagai aplikasi untuk merancang kaki bionik dengan antropometri bahasa Indonesia sebagai acuan dimensi kaki bionik. Kemudian untuk mensimulasikan pergerakan kaki bionik yang dirancang penulis membawa desain tersebut ke aplikasi Matlab / Simulink. Torsi dan gerakan untuk gerakan eksperimental kaki bionik telah dihitung oleh penulis. Kaki bionik yang telah dibuat akan diuji untuk pengambilan data. Sistem kaki bionik memiliki komponen penting seperti sensor sinyal listrik (EMG), motor DC dan Arduino. Fungsi EMG adalah menerima sinyal otot melalui paha pengguna [2]. Motor DC akan
menggerakkan kaki bionik, dan arah putaran motor DC akan diatur melalui penggerak motor [3]. Perangkat Arduino merupakan perangkat elektronik yang berperan sebagai pengontrol dan pemroses data pada kaki bionik. Data-data tersebut diatas merupakan data dari EMG menuju motor DC.
Kaki bionik yang telah dibuat akan diujikan pada seseorang yang mengalami disabilitas ektremitas rendah Penulis memiliki tujuan agar dalam penelitian ini penulis mendapatkan waktu setel, overshoot yang maksimal dan kesalahan steady state yang seminimal mungkin. Penulis juga berharap penelitian ini dapat membantu penyandang disabilitas khususnya penyandang disabilitas ekstremitas rendah untuk kembali ke masyarakat sehingga dapat kembali lagi ke masyarakat sebagai warga negara yang bermanfaat.
Dalam penelitian ini adapun beberapa batasan yang ditetapkan oleh peneliti, yaitu:
1. 3D design dan simulasi yang digunakan pada
prototype kaki bionik menggunakan software
INVENTOR dan MATLAB/SIMULINK.
2. Obek penelitian yang dilaksnakan berupa
respon gerak dari prototype kaki bionik pada
simulasi dan aktual.
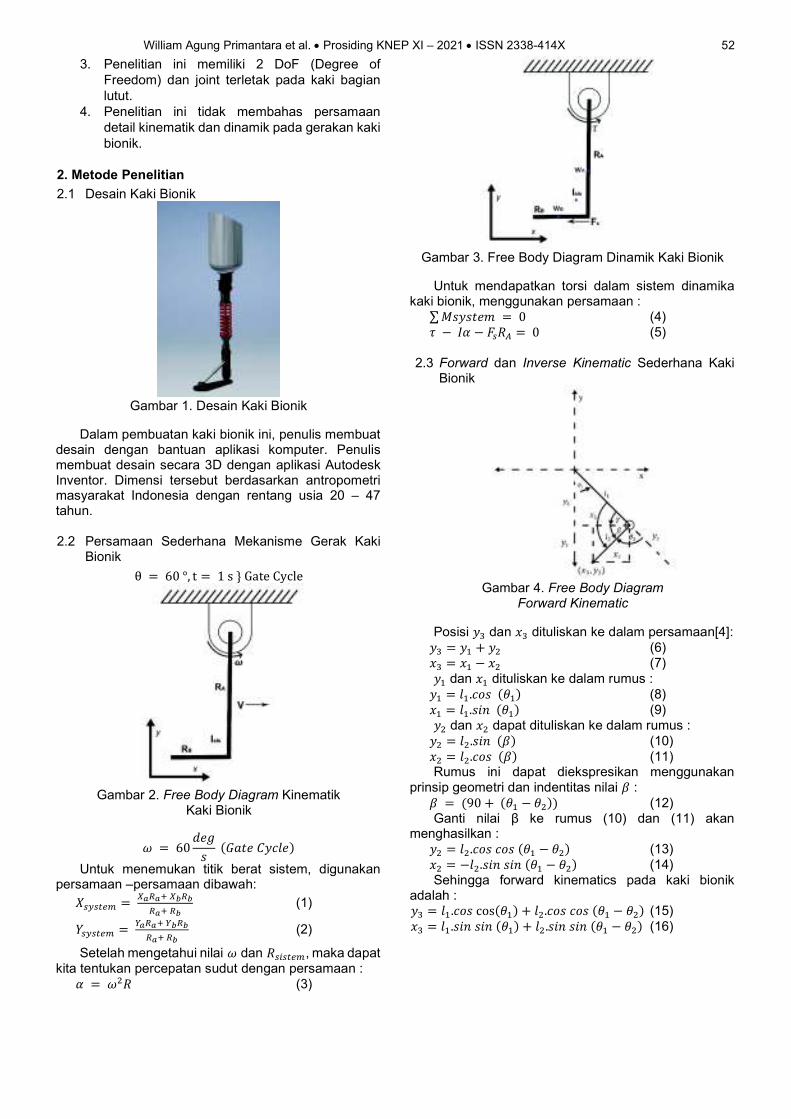
William Agung Primantara et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 52
3. Penelitian ini memiliki 2 DoF (Degree of
Freedom) dan joint terletak pada kaki bagian
lutut.
4. Penelitian ini tidak membahas persamaan
detail kinematik dan dinamik pada gerakan kaki
bionik.
2. Metode Penelitian
2.1 Desain Kaki Bionik
Gambar 1. Desain Kaki Bionik
Dalam pembuatan kaki bionik ini, penulis membuat desain dengan bantuan aplikasi komputer. Penulis membuat desain secara 3D dengan aplikasi Autodesk Inventor. Dimensi tersebut berdasarkan antropometri masyarakat Indonesia dengan rentang usia 20 – 47 tahun.
2.2 Persamaan Sederhana Mekanisme Gerak Kaki
Bionik
Gambar 2. Free Body Diagram Kinematik
Kaki Bionik
Untuk menemukan titik berat sistem, digunakan persamaan –persamaan dibawah:
(1)
(2)
Setelah mengetahui nilai dan , maka dapat kita tentukan percepatan sudut dengan persamaan :
(3)
Gambar 3. Free Body Diagram Dinamik Kaki Bionik
Untuk mendapatkan torsi dalam sistem dinamika kaki bionik, menggunakan persamaan :
(4) (5)
2.3 Forward dan Inverse Kinematic Sederhana Kaki
Bionik
Gambar 4. Free Body Diagram
Forward Kinematic
Posisi dan dituliskan ke dalam persamaan[4]:
(6) (7)
dan dituliskan ke dalam rumus :
(8)
(9) dan dapat dituliskan ke dalam rumus :
(10)
(11) Rumus ini dapat diekspresikan menggunakan
prinsip geometri dan indentitas nilai :
(12) Ganti nilai β ke rumus (10) dan (11) akan
menghasilkan : (13)
(14) Sehingga forward kinematics pada kaki bionik
adalah : (15)
(16)
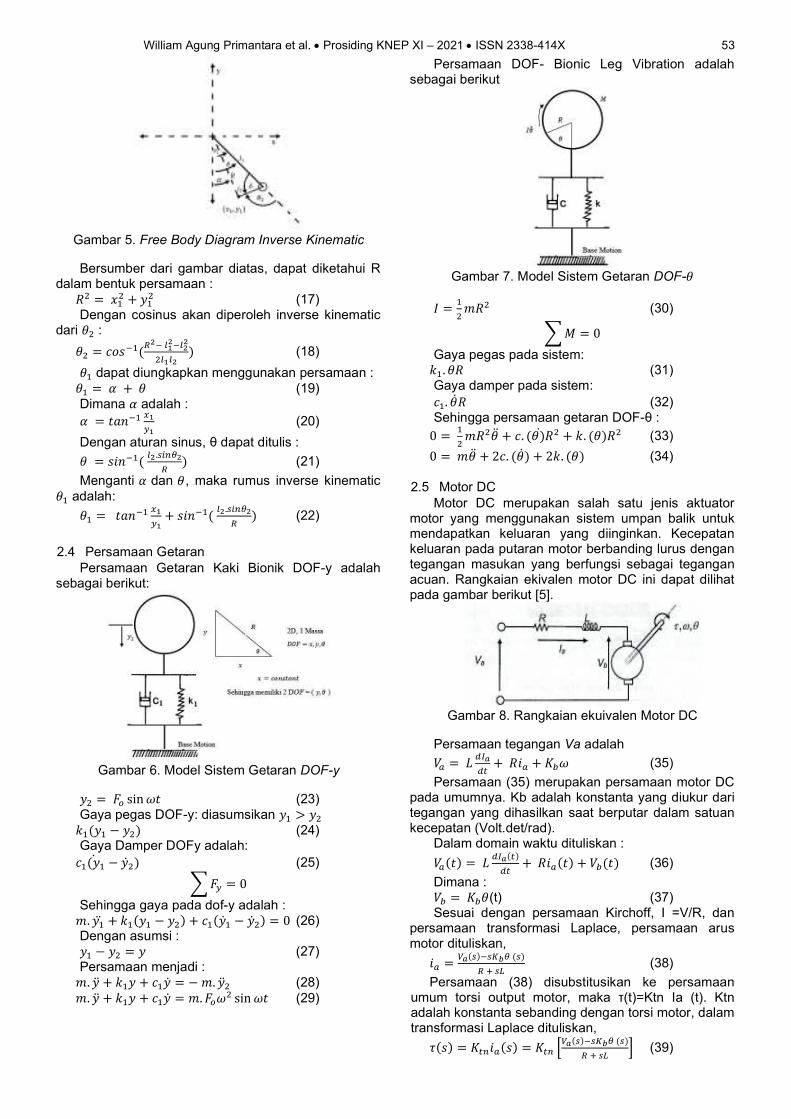
William Agung Primantara et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 53
Gambar 5. Free Body Diagram Inverse Kinematic
Bersumber dari gambar diatas, dapat diketahui R dalam bentuk persamaan :
(17) Dengan cosinus akan diperoleh inverse kinematic
dari :
(18)
dapat diungkapkan menggunakan persamaan :
(19)
Dimana adalah :
(20)
Dengan aturan sinus, θ dapat ditulis :
(21)
Menganti dan , maka rumus inverse kinematic
adalah:
(22)
2.4 Persamaan Getaran
Persamaan Getaran Kaki Bionik DOF-y adalah sebagai berikut:
Gambar 6. Model Sistem Getaran DOF-y
(23)
Gaya pegas DOF-y: diasumsikan
(24) Gaya Damper DOFy adalah:
(25)
Sehingga gaya pada dof-y adalah : (26)
Dengan asumsi : (27)
Persamaan menjadi : (28)
(29)
Persamaan DOF- Bionic Leg Vibration adalah sebagai berikut
Gambar 7. Model Sistem Getaran DOF-
(30)
Gaya pegas pada sistem: (31)
Gaya damper pada sistem:
(32) Sehingga persamaan getaran DOF-θ :
(33)
(34)
2.5 Motor DC
Motor DC merupakan salah satu jenis aktuator motor yang menggunakan sistem umpan balik untuk mendapatkan keluaran yang diinginkan. Kecepatan keluaran pada putaran motor berbanding lurus dengan tegangan masukan yang berfungsi sebagai tegangan acuan. Rangkaian ekivalen motor DC ini dapat dilihat pada gambar berikut [5].
Gambar 8. Rangkaian ekuivalen Motor DC
Persamaan tegangan Va adalah
(35)
Persamaan (35) merupakan persamaan motor DC pada umumnya. Kb adalah konstanta yang diukur dari tegangan yang dihasilkan saat berputar dalam satuan kecepatan (Volt.det/rad).
Dalam domain waktu dituliskan :
(36)
Dimana : (t) (37)
Sesuai dengan persamaan Kirchoff, I =V/R, dan persamaan transformasi Laplace, persamaan arus motor dituliskan,
(38)
Persamaan (38) disubstitusikan ke persamaan umum torsi output motor, maka τ(t)=Ktn Ia (t). Ktn adalah konstanta sebanding dengan torsi motor, dalam transformasi Laplace dituliskan,
(39)
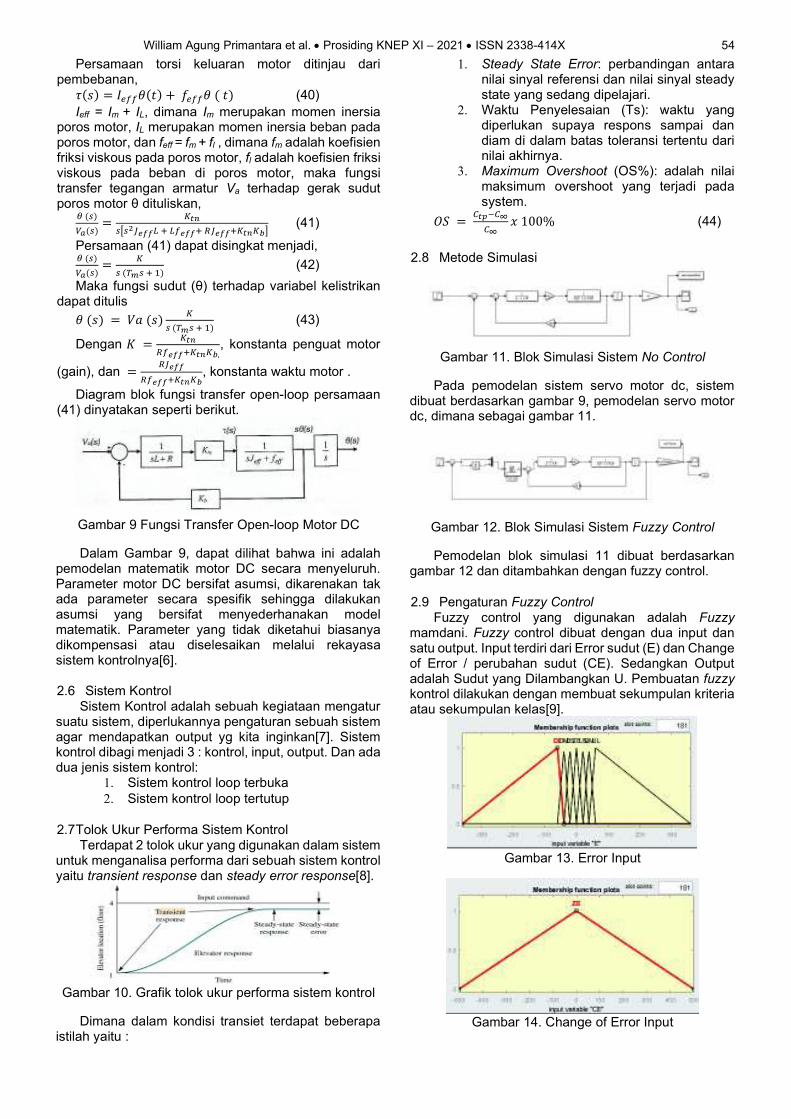
William Agung Primantara et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 54
Persamaan torsi keluaran motor ditinjau dari pembebanan,
(40)
Ieff = Im + IL, dimana Im merupakan momen inersia poros motor, IL merupakan momen inersia beban pada poros motor, dan feff = fm + fl , dimana fm adalah koefisien friksi viskous pada poros motor, fl adalah koefisien friksi viskous pada beban di poros motor, maka fungsi transfer tegangan armatur Va terhadap gerak sudut poros motor θ dituliskan,
(41)
Persamaan (41) dapat disingkat menjadi,
(42)
Maka fungsi sudut (θ) terhadap variabel kelistrikan dapat ditulis
(43)
Dengan , konstanta penguat motor
(gain), dan , konstanta waktu motor .
Diagram blok fungsi transfer open-loop persamaan (41) dinyatakan seperti berikut.
Gambar 9 Fungsi Transfer Open-loop Motor DC
Dalam Gambar 9, dapat dilihat bahwa ini adalah pemodelan matematik motor DC secara menyeluruh. Parameter motor DC bersifat asumsi, dikarenakan tak ada parameter secara spesifik sehingga dilakukan asumsi yang bersifat menyederhanakan model matematik. Parameter yang tidak diketahui biasanya dikompensasi atau diselesaikan melalui rekayasa sistem kontrolnya[6].
2.6 Sistem Kontrol
Sistem Kontrol adalah sebuah kegiataan mengatur suatu sistem, diperlukannya pengaturan sebuah sistem agar mendapatkan output yg kita inginkan[7]. Sistem kontrol dibagi menjadi 3 : kontrol, input, output. Dan ada dua jenis sistem kontrol:
1. Sistem kontrol loop terbuka
2. Sistem kontrol loop tertutup
2.7 Tolok Ukur Performa Sistem Kontrol
Terdapat 2 tolok ukur yang digunakan dalam sistem untuk menganalisa performa dari sebuah sistem kontrol yaitu transient response dan steady error response[8].
Gambar 10. Grafik tolok ukur performa sistem kontrol
Dimana dalam kondisi transiet terdapat beberapa istilah yaitu :
1. Steady State Error: perbandingan antara nilai sinyal referensi dan nilai sinyal steady state yang sedang dipelajari.
2. Waktu Penyelesaian (Ts): waktu yang diperlukan supaya respons sampai dan diam di dalam batas toleransi tertentu dari nilai akhirnya.
3. Maximum Overshoot (OS%): adalah nilai maksimum overshoot yang terjadi pada system.
(44)
2.8 Metode Simulasi
Gambar 11. Blok Simulasi Sistem No Control
Pada pemodelan sistem servo motor dc, sistem dibuat berdasarkan gambar 9, pemodelan servo motor dc, dimana sebagai gambar 11.
Gambar 12. Blok Simulasi Sistem Fuzzy Control
Pemodelan blok simulasi 11 dibuat berdasarkan gambar 12 dan ditambahkan dengan fuzzy control.
2.9 Pengaturan Fuzzy Control Fuzzy control yang digunakan adalah Fuzzy
mamdani. Fuzzy control dibuat dengan dua input dan satu output. Input terdiri dari Error sudut (E) dan Change of Error / perubahan sudut (CE). Sedangkan Output adalah Sudut yang Dilambangkan U. Pembuatan fuzzy kontrol dilakukan dengan membuat sekumpulan kriteria atau sekumpulan kelas[9].
Gambar 13. Error Input
Gambar 14. Change of Error Input

William Agung Primantara et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 55
Gambar 15. Output Sudut
Input dan output yang ditunjukkan pada Gambar 13, 14 dan 15 terdiri dari himpunan fuzzy dalam bentuk trimf.
Gambar 16. Fuzzy Logic Surface Viewer
Gambar 16 merupakan Surface Viewer berdasarkan logika fuzzy yang telah dibuat.
2.10 Prosedur Penelitian
Dalam penelitian ini, penulis membuat desain 3D dan mensimulasikannya dengan beberapa nilai variabel yang mendukung simulasi tersebut. Penulis membuat desain Kaki Bionik menggunakan Autodesk Inventor, setelah itu desain akan diuji menggunakan software MATLAB/Simulink dengan Fuzzy Controller. Variabel yang akan diuji adalah Fuzzy Control dan No Control. Setelah mendapatkan data berupa grafik kaki Bionic, maka akan dilakukan pembahasan mengenai data yang diperoleh. Hal ini dilakukan agar penulis dapat mengambil kesimpulan dari penelitian mengenai perancangan dan penggunaan kontroler fuzzy pada kaki bionik.
Adapun beberapa langkah dalam melakukan penelitian ini, yaitu:
1. Mendesain Kaki Bionik berdasarkan
antropometri masyarakat Indonesia.
2. Mensimualsikan desain Kaki Bionik
menggunakan simscape pada aplikasi
Matlab/Simulink.
3. Pengambilan data untuk kemudian
dianalisis.
3. Hasil dan Pembahasan
3.1 Simulasi Kaki Bionik dalam Matlab/Simulink
Gambar 17. Gerakan Kaki Bionik di Simscape
Matlab/Simulink
Dari Gambar 17, animasi 3D dari simulasi gerakan kaki bionik ditampilkan. Gerakan tersebut menunjukkan setengah siklus gait cycle kaki bionik selama 10 detik.
3.2 Analisa dan Pengumpulan Data Simulasi
Gambar 18. Grafik Simulasi No Control (0° - 60°)
Perubahan sudut terjadi setelah detik pertama, setelah itu grafik mencapai keadaan Steady State pada 7,83 s. Maximum Overshoot adalah 64.107° atau sekitar 6,84% dan errornya sebesar 6,84%.
Gambar 19. Grafik Simulasi No Control (60° - 0°)
Dapat dipahami bahwa perubahan sudut berubah menjadi 0 setelah detik pertama, sedangkan keadaan steady state terjadi pada 8,64 s. Nilai overshoot yang didapat sebesar -4,107° atau 6,84% dan error sebesar 6,84% dari sudut referensi.
0 2 4 6 8 10
-10
0
10
20
30
40
50
60
70
Positio
n (
Degre
es)
Time (Second)
No Control
Refrence
No Control Simulation
for Bionic Leg 0-60 Deg
0 2 4 6 8 10
-10
0
10
20
30
40
50
60
70
Positio
n (
De
gre
es)
Time (Second)
No Control
Refrence
No Control Simulation
for Bionic Leg 60-0 Deg
a
b
C
d e f
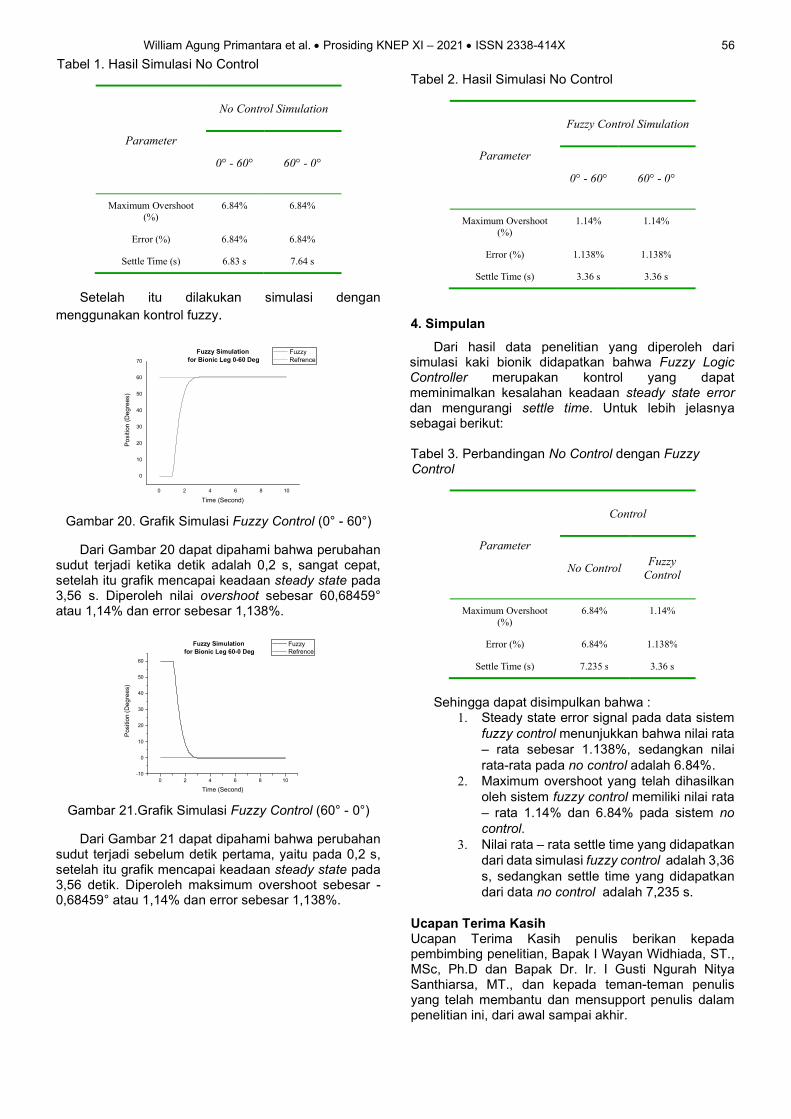
William Agung Primantara et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 56
Tabel 1. Hasil Simulasi No Control
Parameter
No Control Simulation
0° - 60° 60° - 0°
Maximum Overshoot
(%) 6.84% 6.84%
Error (%) 6.84% 6.84%
Settle Time (s) 6.83 s 7.64 s
Setelah itu dilakukan simulasi dengan
menggunakan kontrol fuzzy.
Gambar 20. Grafik Simulasi Fuzzy Control (0° - 60°)
Dari Gambar 20 dapat dipahami bahwa perubahan sudut terjadi ketika detik adalah 0,2 s, sangat cepat, setelah itu grafik mencapai keadaan steady state pada 3,56 s. Diperoleh nilai overshoot sebesar 60,68459° atau 1,14% dan error sebesar 1,138%.
Gambar 21.Grafik Simulasi Fuzzy Control (60° - 0°)
Dari Gambar 21 dapat dipahami bahwa perubahan sudut terjadi sebelum detik pertama, yaitu pada 0,2 s, setelah itu grafik mencapai keadaan steady state pada 3,56 detik. Diperoleh maksimum overshoot sebesar -0,68459° atau 1,14% dan error sebesar 1,138%.
Tabel 2. Hasil Simulasi No Control
Parameter
Fuzzy Control Simulation
0° - 60° 60° - 0°
Maximum Overshoot
(%) 1.14% 1.14%
Error (%) 1.138% 1.138%
Settle Time (s) 3.36 s 3.36 s
4. Simpulan
Dari hasil data penelitian yang diperoleh dari simulasi kaki bionik didapatkan bahwa Fuzzy Logic Controller merupakan kontrol yang dapat meminimalkan kesalahan keadaan steady state error dan mengurangi settle time. Untuk lebih jelasnya sebagai berikut:
Tabel 3. Perbandingan No Control dengan Fuzzy Control
Parameter
Control
No Control Fuzzy
Control
Maximum Overshoot
(%) 6.84% 1.14%
Error (%) 6.84% 1.138%
Settle Time (s) 7.235 s 3.36 s
Sehingga dapat disimpulkan bahwa :
1. Steady state error signal pada data sistem
fuzzy control menunjukkan bahwa nilai rata
– rata sebesar 1.138%, sedangkan nilai
rata-rata pada no control adalah 6.84%.
2. Maximum overshoot yang telah dihasilkan
oleh sistem fuzzy control memiliki nilai rata
– rata 1.14% dan 6.84% pada sistem no
control.
3. Nilai rata – rata settle time yang didapatkan
dari data simulasi fuzzy control adalah 3,36
s, sedangkan settle time yang didapatkan
dari data no control adalah 7,235 s.
Ucapan Terima Kasih Ucapan Terima Kasih penulis berikan kepada pembimbing penelitian, Bapak I Wayan Widhiada, ST., MSc, Ph.D dan Bapak Dr. Ir. I Gusti Ngurah Nitya Santhiarsa, MT., dan kepada teman-teman penulis yang telah membantu dan mensupport penulis dalam penelitian ini, dari awal sampai akhir.
0 2 4 6 8 10
0
10
20
30
40
50
60
70
Po
sitio
n (
Deg
rees)
Time (Second)
Fuzzy
Refrence
Fuzzy Simulation
for Bionic Leg 0-60 Deg
0 2 4 6 8 10
-10
0
10
20
30
40
50
60
Positio
n (
De
gre
es)
Time (Second)
Fuzzy
Refrence
Fuzzy Simulation
for Bionic Leg 60-0 Deg
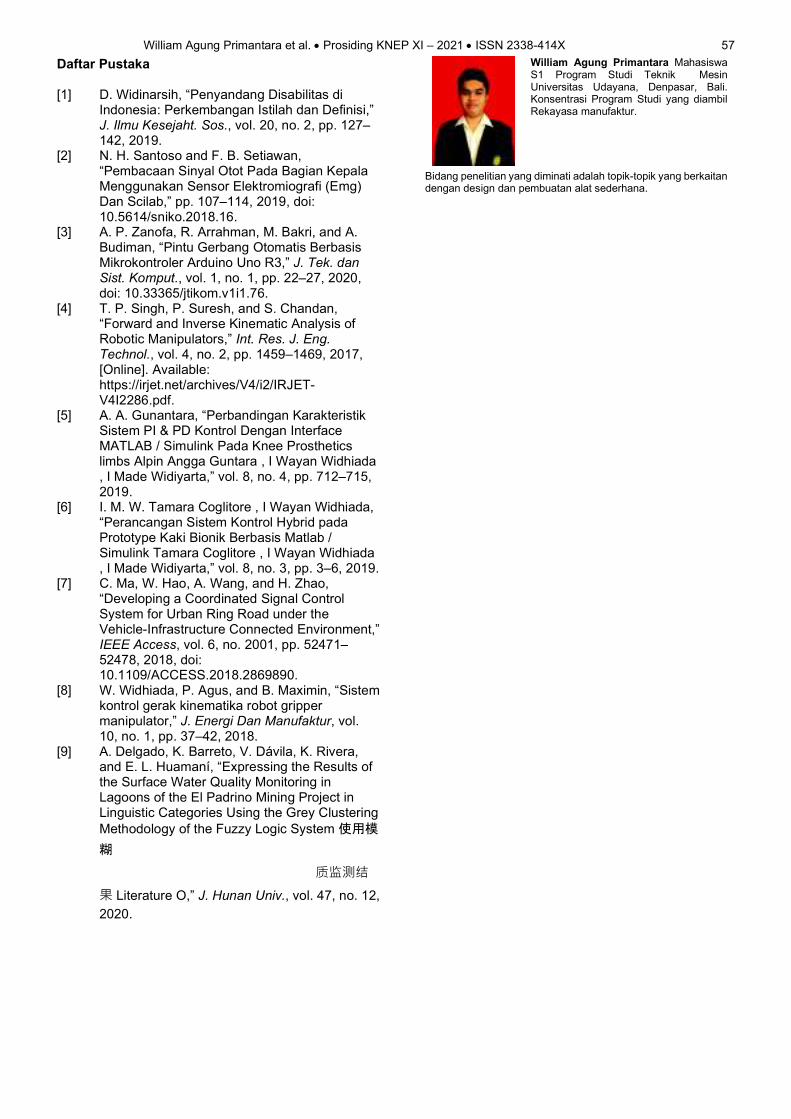
William Agung Primantara et al. · Prosiding KNEP XI – 2021 · ISSN 2338-414X 57
Daftar Pustaka [1] D. Widinarsih, “Penyandang Disabilitas di
Indonesia: Perkembangan Istilah dan Definisi,” J. Ilmu Kesejaht. Sos., vol. 20, no. 2, pp. 127–142, 2019.
[2] N. H. Santoso and F. B. Setiawan, “Pembacaan Sinyal Otot Pada Bagian Kepala Menggunakan Sensor Elektromiografi (Emg) Dan Scilab,” pp. 107–114, 2019, doi: 10.5614/sniko.2018.16.
[3] A. P. Zanofa, R. Arrahman, M. Bakri, and A. Budiman, “Pintu Gerbang Otomatis Berbasis Mikrokontroler Arduino Uno R3,” J. Tek. dan Sist. Komput., vol. 1, no. 1, pp. 22–27, 2020, doi: 10.33365/jtikom.v1i1.76.
[4] T. P. Singh, P. Suresh, and S. Chandan, “Forward and Inverse Kinematic Analysis of Robotic Manipulators,” Int. Res. J. Eng. Technol., vol. 4, no. 2, pp. 1459–1469, 2017, [Online]. Available: https://irjet.net/archives/V4/i2/IRJET-V4I2286.pdf.
[5] A. A. Gunantara, “Perbandingan Karakteristik Sistem PI & PD Kontrol Dengan Interface MATLAB / Simulink Pada Knee Prosthetics limbs Alpin Angga Guntara , I Wayan Widhiada , I Made Widiyarta,” vol. 8, no. 4, pp. 712–715, 2019.
[6] I. M. W. Tamara Coglitore , I Wayan Widhiada, “Perancangan Sistem Kontrol Hybrid pada Prototype Kaki Bionik Berbasis Matlab / Simulink Tamara Coglitore , I Wayan Widhiada , I Made Widiyarta,” vol. 8, no. 3, pp. 3–6, 2019.
[7] C. Ma, W. Hao, A. Wang, and H. Zhao, “Developing a Coordinated Signal Control System for Urban Ring Road under the Vehicle-Infrastructure Connected Environment,” IEEE Access, vol. 6, no. 2001, pp. 52471–52478, 2018, doi: 10.1109/ACCESS.2018.2869890.
[8] W. Widhiada, P. Agus, and B. Maximin, “Sistem kontrol gerak kinematika robot gripper manipulator,” J. Energi Dan Manufaktur, vol. 10, no. 1, pp. 37–42, 2018.
[9] A. Delgado, K. Barreto, V. Dávila, K. Rivera, and E. L. Huamaní, “Expressing the Results of the Surface Water Quality Monitoring in Lagoons of the El Padrino Mining Project in Linguistic Categories Using the Grey Clustering
Methodology of the Fuzzy Logic System
Literature O,” J. Hunan Univ., vol. 47, no. 12,
2020.
William Agung Primantara Mahasiswa S1 Program Studi Teknik Mesin Universitas Udayana, Denpasar, Bali. Konsentrasi Program Studi yang diambil Rekayasa manufaktur.
Bidang penelitian yang diminati adalah topik-topik yang berkaitan dengan design dan pembuatan alat sederhana.

Prosiding Konferensi Nasional Engineering Perhotelan XI, Universitas Udayana - 2021
ISSN 2338-414X
*Korespondensi: Tel./Fax.: - E-mail: [email protected]
ÓTeknik Mesin Universitas Udayana 2021
DISTRIBUSI TEKANAN STATIS PADA SUATU MOBIL MODEL UJI YANG BER- UNDER REAR END BERVARIASI
I G N Bagus Jaya Rusyana1), A. A. Adhi Suryawan 2), I Gusti ketut Sukadana3) 1,2,3)Jurusan Teknik Mesin Universitas Udayana, Kampus Bukit Jimbaran Bali
Abstrak Aliran udara yang melintasi suatu kontur bodi kendaraan akan mempengaruhi gaya hambat aerodinamis kendaraan tersebut. Bodi kendaraan yang aerodinamis dapat mengurangi konsumsi bahan bakar. Tidak hanya mempengaruhi efisiensi bahan bakar, bodi kendaraan yang aerodinamis juga dimanfaatkan untuk membuat kesetabilan kendaraan saat berada di kecepatan yang tinggi. Penenlitian ini menggunakan model kendaraan yang sama dengan variasi sudut kemiringan Under Rear End 0o, 5o, 10o, dan 15o. Model kendaraan di uji dengan kecepatan 5,47m/s dalam 1 unit wind tunnel. Pada masing-masing model kendaraan terjadi stagnasi pada titik pengujian 1 dengan nilai Cp = 1. Kemudian Cp mengalami peningkatan dari titik pengukuran rasio x/l= 0.09 sampai di rasio x/l= 0.3 yang merupakan daerah terjadinya blockage mass. Model kendaraan dengan Under Rear End sudut variasi kemiringan 0o memiliki daerah tekanan rendah yang merugikan pada bagian rear aera lebih banyak seperti yang telah ditunjukkan pada titik pengukuran 28 sampai titik pengukuran 30, dan juga memiliki rata-rata nilai Cp yang lebih rendah di bagian tersebut. Selanjutnya ketika bagian rear area model kendaraan di berikan variasi kemiringan Under Rear End 5o , 10o, dan 15o membuat nilai Cp yang meningkat dari model sebelum nya sehingga dapat mengurangi tekanan rendah yang merugikan pada rear area. Kata kunci: Under Rear End, kontur bodi dan koefisien tekanan
Abstract
Air flow across a contour of the vehicle body will affect the aerodynamic drag of the vehicle. An aerodynamic vehicle body can reduce fuel consumption. Not only affects fuel efficiency, the aerodynamic body of the vehicle is also used to make the vehicle stable at high speeds. This research uses the same vehicle model with variations in the Under Rear End tilt angle of 0o, 5o, 10o, and 15o. The vehicle model was tested with a speed of 5.47m / s in 1 wind tunnel unit. In each vehicle model there was stagnation at test point 1 with a value of Cp = 1. Then Cp increased from the point of measurement of the ratio x / l = 0.09 to the ratio x / l = 0.3 which is the area where mass blockage occurs. Vehicle models with an Under Rear End tilt variation angle of 0o have a lower adverse pressure area in the rear area more as has been shown at measurement point 28 to measurement point 30, and also have a lower mean Cp value in that section. Furthermore, when the rear area of the vehicle model is given an Under Rear End tilt variation of 5o, 10o, and 15o, the Cp value increases from the previous model so that it can reduce adverse low pressure in the rear area.
Key words: Under Rear End , body contour and pressure coefficient
1. Pendahuluan
Perkembangan teknologi di Indonesia semakin maju, khususnya di bidang otomotif. Kendaraan sudah menjadi suatu gaya hidup saat ini, untuk melakukan aktifitas sehari-hari. Peningkatan permintaan kendaraan di negara ini pun semakin tinggi, yang menyebabkan peningkatan komsumsi bahan bakar minyak. Bahan bakar minyak di Indonesia berkurang setiap tahunnya, karena minyak bumi merupakan sumber daya yang tidak dapat diperbaharui. Sehingga memaksa para engineer untuk mencari solusi penghematan bahan bakar minyak [1].
Berbagai peningkatan dilakukan pada kendaraan bermotor, karena di dorong oleh tuntutan peningkatan efisiensi sumber daya dengan melakukan optimasi di berbagai bidang salah satunya pada bodi kendaraan. Jika di lihat beberapa dekade belakangan ini bentuk bodi kendaraan mengalami banyak perubahan. Hal ini bukan tampa alasan, dengan membuat bodi kendaraan yang aerodinamis dapat mengurangi konsumsi bahan bakar. Tidak hanya mempengaruhi
efisiensi bahan bakar, bodi kendaraan yang aerodinamis juga dimanfaatkan untuk membuat kesetabilan kendaraan saat berada di kecepatan yang tinggi.
Karakteristik aerodinamika yang penting diukur pada mobil adalah gaya hambat (D) atau koefisien hambat (Cd). Salah satu yang mempengaruhi besarnya suatu gaya hambat adalah adanya wake. besar kecilnya wake yang terbentuk tergantung pada ketebalan upstream boundary layer, yaitu pada kedudukan /posisi dipermukaan body kecenderungan terjadi separasi aliran. Semakin cepat terjadi separasi aliran akan diikuti oleh blockage alian sehingga energi loss dari aliran semakin awal terjadi hal ini juga mengakibatkan efek viscous pada boundary layer akan berbeda sebagai mana dinyatakan sebagai profil loss. Perubahan mendadak dari boundary layer harus dihindari sehingga dalam rancang bangun body kendaraan harus dipahami kapan aliran harus dipercepat, dan kapan aliran harus diperlambat terutama pada sisi belakang / rear body karena daerah
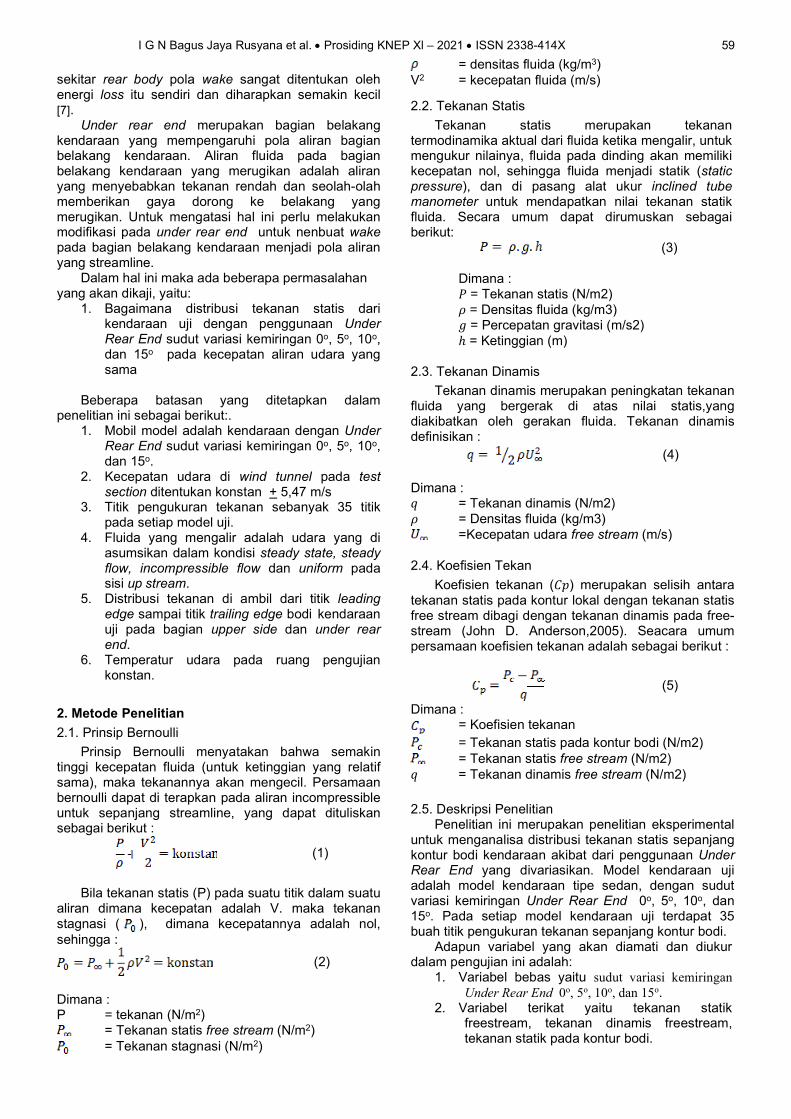
I G N Bagus Jaya Rusyana et al. · Prosiding KNEP Xl – 2021 · ISSN 2338-414X 59
sekitar rear body pola wake sangat ditentukan oleh energi loss itu sendiri dan diharapkan semakin kecil [7].
Under rear end merupakan bagian belakang kendaraan yang mempengaruhi pola aliran bagian belakang kendaraan. Aliran fluida pada bagian belakang kendaraan yang merugikan adalah aliran yang menyebabkan tekanan rendah dan seolah-olah memberikan gaya dorong ke belakang yang merugikan. Untuk mengatasi hal ini perlu melakukan modifikasi pada under rear end untuk nenbuat wake pada bagian belakang kendaraan menjadi pola aliran yang streamline.
Dalam hal ini maka ada beberapa permasalahan yang akan dikaji, yaitu:
1. Bagaimana distribusi tekanan statis dari kendaraan uji dengan penggunaan Under Rear End sudut variasi kemiringan 0o, 5o, 10o, dan 15o pada kecepatan aliran udara yang sama
Beberapa batasan yang ditetapkan dalam
penelitian ini sebagai berikut:. 1. Mobil model adalah kendaraan dengan Under
Rear End sudut variasi kemiringan 0o, 5o, 10o, dan 15o.
2. Kecepatan udara di wind tunnel pada test section ditentukan konstan + 5,47 m/s
3. Titik pengukuran tekanan sebanyak 35 titik pada setiap model uji.
4. Fluida yang mengalir adalah udara yang di asumsikan dalam kondisi steady state, steady flow, incompressible flow dan uniform pada sisi up stream.
5. Distribusi tekanan di ambil dari titik leading edge sampai titik trailing edge bodi kendaraan uji pada bagian upper side dan under rear end.
6. Temperatur udara pada ruang pengujian konstan.
2. Metode Penelitian
2.1. Prinsip Bernoulli
Prinsip Bernoulli menyatakan bahwa semakin tinggi kecepatan fluida (untuk ketinggian yang relatif sama), maka tekanannya akan mengecil. Persamaan bernoulli dapat di terapkan pada aliran incompressible untuk sepanjang streamline, yang dapat dituliskan sebagai berikut :
(1)
Bila tekanan statis (P) pada suatu titik dalam suatu
aliran dimana kecepatan adalah V. maka tekanan stagnasi ( ), dimana kecepatannya adalah nol,
sehingga :
(2)
Dimana : P = tekanan (N/m2)
= Tekanan statis free stream (N/m2)
= Tekanan stagnasi (N/m2)
= densitas fluida (kg/m3)
V2 = kecepatan fluida (m/s)
2.2. Tekanan Statis
Tekanan statis merupakan tekanan termodinamika aktual dari fluida ketika mengalir, untuk mengukur nilainya, fluida pada dinding akan memiliki kecepatan nol, sehingga fluida menjadi statik (static pressure), dan di pasang alat ukur inclined tube manometer untuk mendapatkan nilai tekanan statik fluida. Secara umum dapat dirumuskan sebagai berikut:
(3)
Dimana : = Tekanan statis (N/m2) = Densitas fluida (kg/m3) = Percepatan gravitasi (m/s2) = Ketinggian (m)
2.3. Tekanan Dinamis
Tekanan dinamis merupakan peningkatan tekanan fluida yang bergerak di atas nilai statis,yang diakibatkan oleh gerakan fluida. Tekanan dinamis definisikan :
(4)
Dimana : = Tekanan dinamis (N/m2) = Densitas fluida (kg/m3)
=Kecepatan udara free stream (m/s)
2.4. Koefisien Tekan
Koefisien tekanan ( ) merupakan selisih antara tekanan statis pada kontur lokal dengan tekanan statis free stream dibagi dengan tekanan dinamis pada free-stream (John D. Anderson,2005). Seacara umum persamaan koefisien tekanan adalah sebagai berikut :
(5)
Dimana : = Koefisien tekanan
= Tekanan statis pada kontur bodi (N/m2)
= Tekanan statis free stream (N/m2)
= Tekanan dinamis free stream (N/m2)
2.5. Deskripsi Penelitian Penelitian ini merupakan penelitian eksperimental
untuk menganalisa distribusi tekanan statis sepanjang kontur bodi kendaraan akibat dari penggunaan Under Rear End yang divariasikan. Model kendaraan uji adalah model kendaraan tipe sedan, dengan sudut variasi kemiringan Under Rear End 0o, 5o, 10o, dan 15o. Pada setiap model kendaraan uji terdapat 35 buah titik pengukuran tekanan sepanjang kontur bodi.
Adapun variabel yang akan diamati dan diukur dalam pengujian ini adalah:
1. Variabel bebas yaitu sudut variasi kemiringan
Under Rear End 0o, 5o, 10o, dan 15o. 2. Variabel terikat yaitu tekanan statik
freestream, tekanan dinamis freestream, tekanan statik pada kontur bodi.
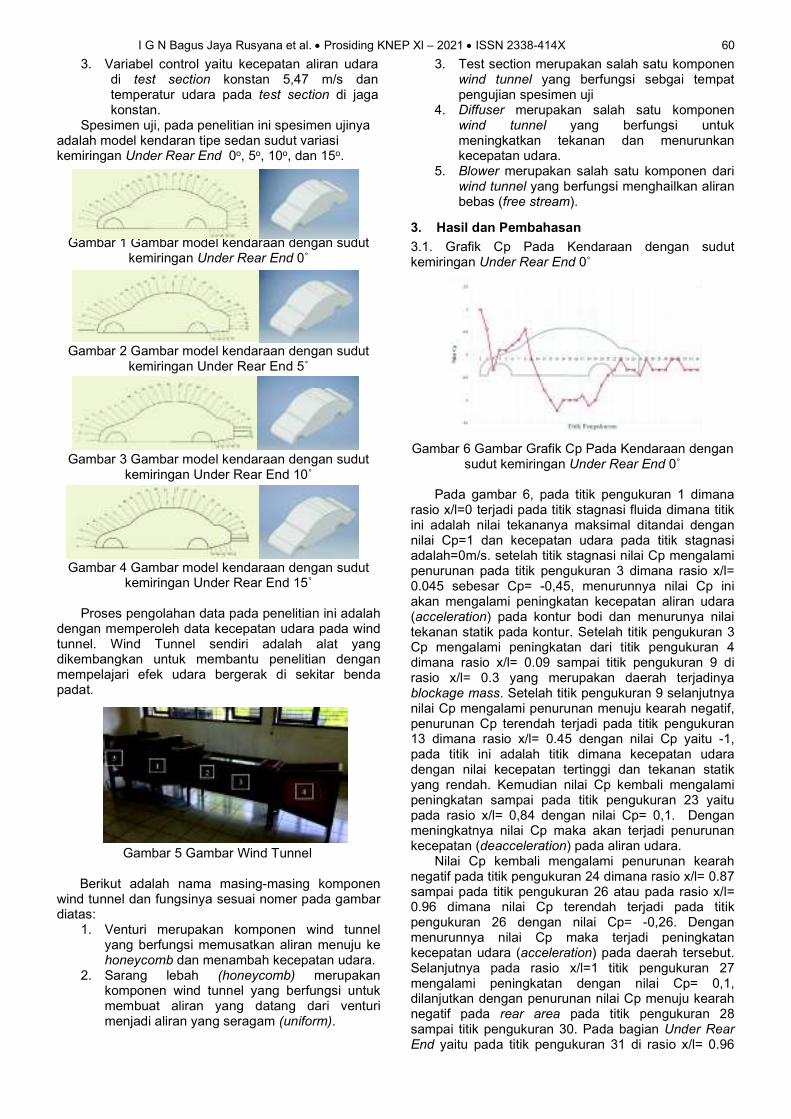
I G N Bagus Jaya Rusyana et al. · Prosiding KNEP Xl – 2021 · ISSN 2338-414X 60
3. Variabel control yaitu kecepatan aliran udara di test section konstan 5,47 m/s dan temperatur udara pada test section di jaga konstan.
Spesimen uji, pada penelitian ini spesimen ujinya adalah model kendaran tipe sedan sudut variasi kemiringan Under Rear End 0o, 5o, 10o, dan 15o.
Gambar 1 Gambar model kendaraan dengan sudut kemiringan Under Rear End 0˚
Gambar 2 Gambar model kendaraan dengan sudut kemiringan Under Rear End 5˚
Gambar 3 Gambar model kendaraan dengan sudut kemiringan Under Rear End 10˚
Gambar 4 Gambar model kendaraan dengan sudut kemiringan Under Rear End 15˚
Proses pengolahan data pada penelitian ini adalah dengan memperoleh data kecepatan udara pada wind tunnel. Wind Tunnel sendiri adalah alat yang dikembangkan untuk membantu penelitian dengan mempelajari efek udara bergerak di sekitar benda padat.
Gambar 5 Gambar Wind Tunnel
Berikut adalah nama masing-masing komponen wind tunnel dan fungsinya sesuai nomer pada gambar diatas:
1. Venturi merupakan komponen wind tunnel yang berfungsi memusatkan aliran menuju ke honeycomb dan menambah kecepatan udara.
2. Sarang lebah (honeycomb) merupakan komponen wind tunnel yang berfungsi untuk membuat aliran yang datang dari venturi menjadi aliran yang seragam (uniform).
3. Test section merupakan salah satu komponen wind tunnel yang berfungsi sebgai tempat pengujian spesimen uji
4. Diffuser merupakan salah satu komponen wind tunnel yang berfungsi untuk meningkatkan tekanan dan menurunkan kecepatan udara.
5. Blower merupakan salah satu komponen dari wind tunnel yang berfungsi menghailkan aliran bebas (free stream).
3. Hasil dan Pembahasan
3.1. Grafik Cp Pada Kendaraan dengan sudut kemiringan Under Rear End 0˚
Gambar 6 Gambar Grafik Cp Pada Kendaraan dengan
sudut kemiringan Under Rear End 0˚
Pada gambar 6, pada titik pengukuran 1 dimana rasio x/l=0 terjadi pada titik stagnasi fluida dimana titik ini adalah nilai tekananya maksimal ditandai dengan nilai Cp=1 dan kecepatan udara pada titik stagnasi adalah=0m/s. setelah titik stagnasi nilai Cp mengalami penurunan pada titik pengukuran 3 dimana rasio x/l= 0.045 sebesar Cp= -0,45, menurunnya nilai Cp ini akan mengalami peningkatan kecepatan aliran udara (acceleration) pada kontur bodi dan menurunya nilai tekanan statik pada kontur. Setelah titik pengukuran 3 Cp mengalami peningkatan dari titik pengukuran 4 dimana rasio x/l= 0.09 sampai titik pengukuran 9 di rasio x/l= 0.3 yang merupakan daerah terjadinya blockage mass. Setelah titik pengukuran 9 selanjutnya nilai Cp mengalami penurunan menuju kearah negatif, penurunan Cp terendah terjadi pada titik pengukuran 13 dimana rasio x/l= 0.45 dengan nilai Cp yaitu -1, pada titik ini adalah titik dimana kecepatan udara dengan nilai kecepatan tertinggi dan tekanan statik yang rendah. Kemudian nilai Cp kembali mengalami peningkatan sampai pada titik pengukuran 23 yaitu pada rasio x/l= 0,84 dengan nilai Cp= 0,1. Dengan meningkatnya nilai Cp maka akan terjadi penurunan kecepatan (deacceleration) pada aliran udara.
Nilai Cp kembali mengalami penurunan kearah negatif pada titik pengukuran 24 dimana rasio x/l= 0.87 sampai pada titik pengukuran 26 atau pada rasio x/l= 0.96 dimana nilai Cp terendah terjadi pada titik pengukuran 26 dengan nilai Cp= -0,26. Dengan menurunnya nilai Cp maka terjadi peningkatan kecepatan udara (acceleration) pada daerah tersebut. Selanjutnya pada rasio x/l=1 titik pengukuran 27 mengalami peningkatan dengan nilai Cp= 0,1, dilanjutkan dengan penurunan nilai Cp menuju kearah negatif pada rear area pada titik pengukuran 28 sampai titik pengukuran 30. Pada bagian Under Rear End yaitu pada titik pengukuran 31 di rasio x/l= 0.96
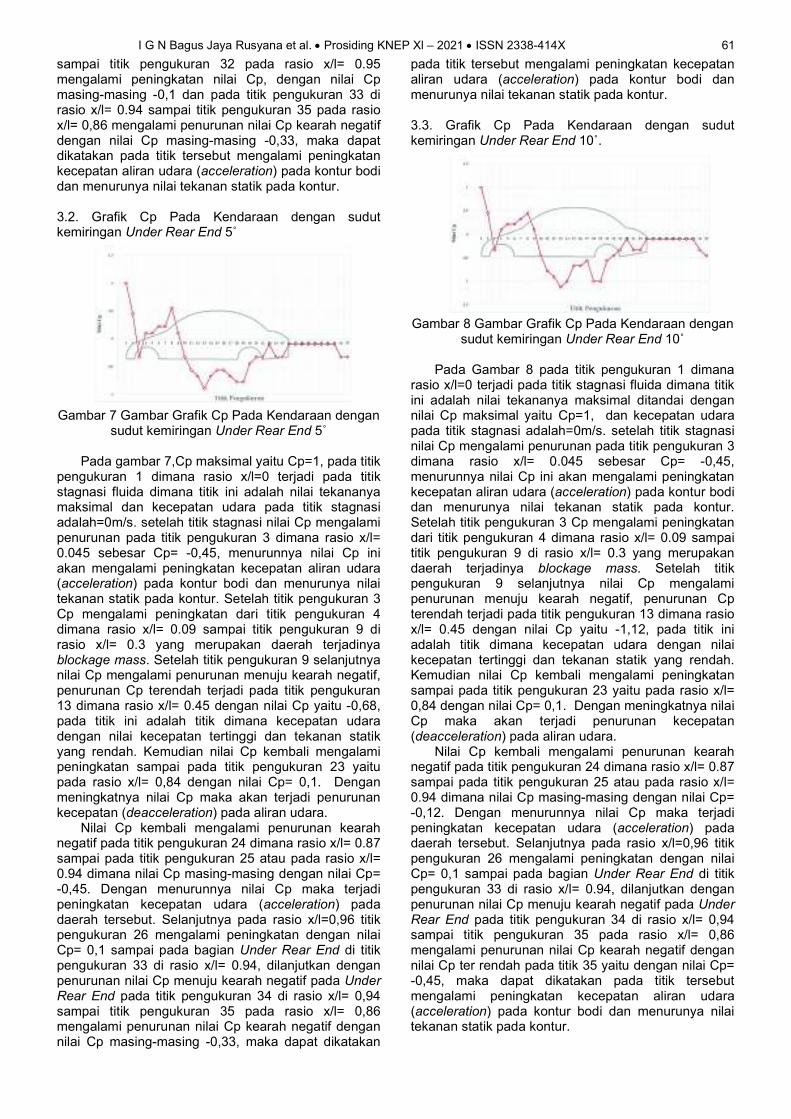
I G N Bagus Jaya Rusyana et al. · Prosiding KNEP Xl – 2021 · ISSN 2338-414X 61
sampai titik pengukuran 32 pada rasio x/l= 0.95 mengalami peningkatan nilai Cp, dengan nilai Cp masing-masing -0,1 dan pada titik pengukuran 33 di rasio x/l= 0.94 sampai titik pengukuran 35 pada rasio x/l= 0,86 mengalami penurunan nilai Cp kearah negatif dengan nilai Cp masing-masing -0,33, maka dapat dikatakan pada titik tersebut mengalami peningkatan kecepatan aliran udara (acceleration) pada kontur bodi dan menurunya nilai tekanan statik pada kontur. 3.2. Grafik Cp Pada Kendaraan dengan sudut kemiringan Under Rear End 5˚ Gambar 7 Gambar Grafik Cp Pada Kendaraan dengan
sudut kemiringan Under Rear End 5˚
Pada gambar 7,Cp maksimal yaitu Cp=1, pada titik pengukuran 1 dimana rasio x/l=0 terjadi pada titik stagnasi fluida dimana titik ini adalah nilai tekananya maksimal dan kecepatan udara pada titik stagnasi adalah=0m/s. setelah titik stagnasi nilai Cp mengalami penurunan pada titik pengukuran 3 dimana rasio x/l= 0.045 sebesar Cp= -0,45, menurunnya nilai Cp ini akan mengalami peningkatan kecepatan aliran udara (acceleration) pada kontur bodi dan menurunya nilai tekanan statik pada kontur. Setelah titik pengukuran 3 Cp mengalami peningkatan dari titik pengukuran 4 dimana rasio x/l= 0.09 sampai titik pengukuran 9 di rasio x/l= 0.3 yang merupakan daerah terjadinya blockage mass. Setelah titik pengukuran 9 selanjutnya nilai Cp mengalami penurunan menuju kearah negatif, penurunan Cp terendah terjadi pada titik pengukuran 13 dimana rasio x/l= 0.45 dengan nilai Cp yaitu -0,68, pada titik ini adalah titik dimana kecepatan udara dengan nilai kecepatan tertinggi dan tekanan statik yang rendah. Kemudian nilai Cp kembali mengalami peningkatan sampai pada titik pengukuran 23 yaitu pada rasio x/l= 0,84 dengan nilai Cp= 0,1. Dengan meningkatnya nilai Cp maka akan terjadi penurunan kecepatan (deacceleration) pada aliran udara.
Nilai Cp kembali mengalami penurunan kearah negatif pada titik pengukuran 24 dimana rasio x/l= 0.87 sampai pada titik pengukuran 25 atau pada rasio x/l= 0.94 dimana nilai Cp masing-masing dengan nilai Cp= -0,45. Dengan menurunnya nilai Cp maka terjadi peningkatan kecepatan udara (acceleration) pada daerah tersebut. Selanjutnya pada rasio x/l=0,96 titik pengukuran 26 mengalami peningkatan dengan nilai Cp= 0,1 sampai pada bagian Under Rear End di titik pengukuran 33 di rasio x/l= 0.94, dilanjutkan dengan penurunan nilai Cp menuju kearah negatif pada Under Rear End pada titik pengukuran 34 di rasio x/l= 0,94 sampai titik pengukuran 35 pada rasio x/l= 0,86 mengalami penurunan nilai Cp kearah negatif dengan nilai Cp masing-masing -0,33, maka dapat dikatakan
pada titik tersebut mengalami peningkatan kecepatan aliran udara (acceleration) pada kontur bodi dan menurunya nilai tekanan statik pada kontur. 3.3. Grafik Cp Pada Kendaraan dengan sudut kemiringan Under Rear End 10˚. Gambar 8 Gambar Grafik Cp Pada Kendaraan dengan
sudut kemiringan Under Rear End 10˚
Pada Gambar 8 pada titik pengukuran 1 dimana rasio x/l=0 terjadi pada titik stagnasi fluida dimana titik ini adalah nilai tekananya maksimal ditandai dengan nilai Cp maksimal yaitu Cp=1, dan kecepatan udara pada titik stagnasi adalah=0m/s. setelah titik stagnasi nilai Cp mengalami penurunan pada titik pengukuran 3 dimana rasio x/l= 0.045 sebesar Cp= -0,45, menurunnya nilai Cp ini akan mengalami peningkatan kecepatan aliran udara (acceleration) pada kontur bodi dan menurunya nilai tekanan statik pada kontur. Setelah titik pengukuran 3 Cp mengalami peningkatan dari titik pengukuran 4 dimana rasio x/l= 0.09 sampai titik pengukuran 9 di rasio x/l= 0.3 yang merupakan daerah terjadinya blockage mass. Setelah titik pengukuran 9 selanjutnya nilai Cp mengalami penurunan menuju kearah negatif, penurunan Cp terendah terjadi pada titik pengukuran 13 dimana rasio x/l= 0.45 dengan nilai Cp yaitu -1,12, pada titik ini adalah titik dimana kecepatan udara dengan nilai kecepatan tertinggi dan tekanan statik yang rendah. Kemudian nilai Cp kembali mengalami peningkatan sampai pada titik pengukuran 23 yaitu pada rasio x/l= 0,84 dengan nilai Cp= 0,1. Dengan meningkatnya nilai Cp maka akan terjadi penurunan kecepatan (deacceleration) pada aliran udara.
Nilai Cp kembali mengalami penurunan kearah negatif pada titik pengukuran 24 dimana rasio x/l= 0.87 sampai pada titik pengukuran 25 atau pada rasio x/l= 0.94 dimana nilai Cp masing-masing dengan nilai Cp= -0,12. Dengan menurunnya nilai Cp maka terjadi peningkatan kecepatan udara (acceleration) pada daerah tersebut. Selanjutnya pada rasio x/l=0,96 titik pengukuran 26 mengalami peningkatan dengan nilai Cp= 0,1 sampai pada bagian Under Rear End di titik pengukuran 33 di rasio x/l= 0.94, dilanjutkan dengan penurunan nilai Cp menuju kearah negatif pada Under Rear End pada titik pengukuran 34 di rasio x/l= 0,94 sampai titik pengukuran 35 pada rasio x/l= 0,86 mengalami penurunan nilai Cp kearah negatif dengan nilai Cp ter rendah pada titik 35 yaitu dengan nilai Cp= -0,45, maka dapat dikatakan pada titik tersebut mengalami peningkatan kecepatan aliran udara (acceleration) pada kontur bodi dan menurunya nilai tekanan statik pada kontur.
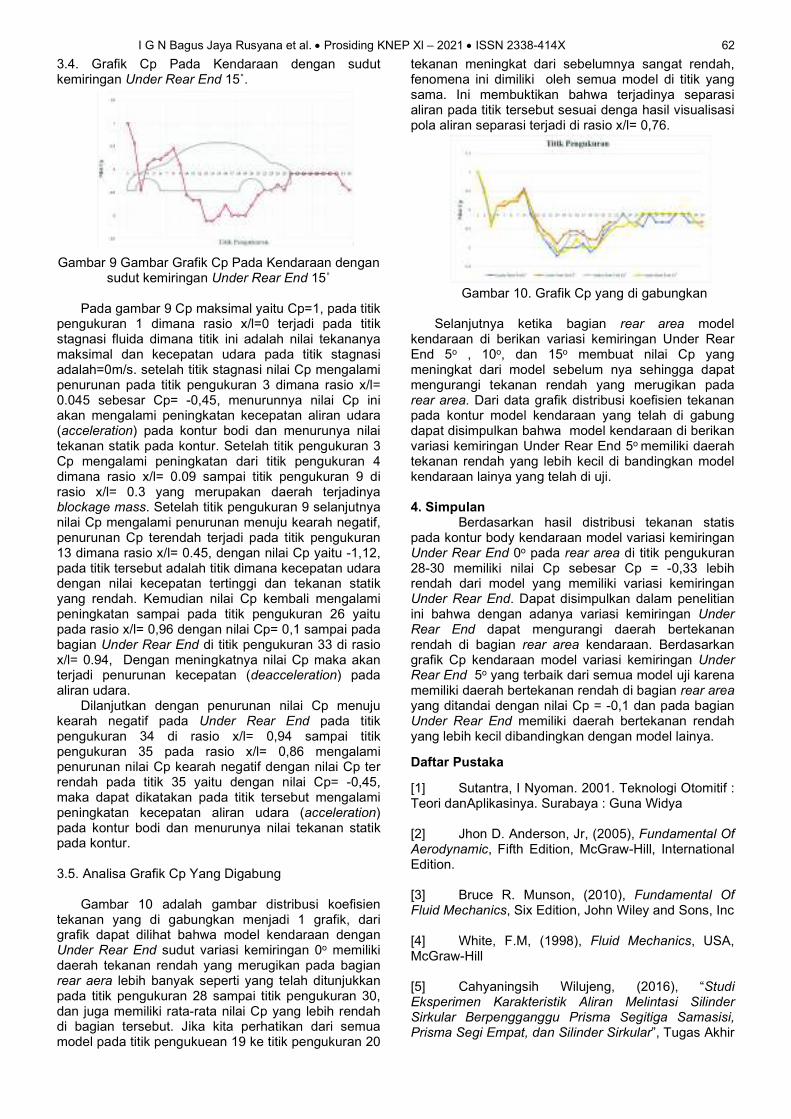
I G N Bagus Jaya Rusyana et al. · Prosiding KNEP Xl – 2021 · ISSN 2338-414X 62
3.4. Grafik Cp Pada Kendaraan dengan sudut kemiringan Under Rear End 15˚. Gambar 9 Gambar Grafik Cp Pada Kendaraan dengan
sudut kemiringan Under Rear End 15˚
Pada gambar 9 Cp maksimal yaitu Cp=1, pada titik pengukuran 1 dimana rasio x/l=0 terjadi pada titik stagnasi fluida dimana titik ini adalah nilai tekananya maksimal dan kecepatan udara pada titik stagnasi adalah=0m/s. setelah titik stagnasi nilai Cp mengalami penurunan pada titik pengukuran 3 dimana rasio x/l= 0.045 sebesar Cp= -0,45, menurunnya nilai Cp ini akan mengalami peningkatan kecepatan aliran udara (acceleration) pada kontur bodi dan menurunya nilai tekanan statik pada kontur. Setelah titik pengukuran 3 Cp mengalami peningkatan dari titik pengukuran 4 dimana rasio x/l= 0.09 sampai titik pengukuran 9 di rasio x/l= 0.3 yang merupakan daerah terjadinya blockage mass. Setelah titik pengukuran 9 selanjutnya nilai Cp mengalami penurunan menuju kearah negatif, penurunan Cp terendah terjadi pada titik pengukuran 13 dimana rasio x/l= 0.45, dengan nilai Cp yaitu -1,12, pada titik tersebut adalah titik dimana kecepatan udara dengan nilai kecepatan tertinggi dan tekanan statik yang rendah. Kemudian nilai Cp kembali mengalami peningkatan sampai pada titik pengukuran 26 yaitu pada rasio x/l= 0,96 dengan nilai Cp= 0,1 sampai pada bagian Under Rear End di titik pengukuran 33 di rasio x/l= 0.94, Dengan meningkatnya nilai Cp maka akan terjadi penurunan kecepatan (deacceleration) pada aliran udara.
Dilanjutkan dengan penurunan nilai Cp menuju kearah negatif pada Under Rear End pada titik pengukuran 34 di rasio x/l= 0,94 sampai titik pengukuran 35 pada rasio x/l= 0,86 mengalami penurunan nilai Cp kearah negatif dengan nilai Cp ter rendah pada titik 35 yaitu dengan nilai Cp= -0,45, maka dapat dikatakan pada titik tersebut mengalami peningkatan kecepatan aliran udara (acceleration) pada kontur bodi dan menurunya nilai tekanan statik pada kontur. 3.5. Analisa Grafik Cp Yang Digabung
Gambar 10 adalah gambar distribusi koefisien tekanan yang di gabungkan menjadi 1 grafik, dari grafik dapat dilihat bahwa model kendaraan dengan Under Rear End sudut variasi kemiringan 0o memiliki daerah tekanan rendah yang merugikan pada bagian rear aera lebih banyak seperti yang telah ditunjukkan pada titik pengukuran 28 sampai titik pengukuran 30, dan juga memiliki rata-rata nilai Cp yang lebih rendah di bagian tersebut. Jika kita perhatikan dari semua model pada titik pengukuean 19 ke titik pengukuran 20
tekanan meningkat dari sebelumnya sangat rendah, fenomena ini dimiliki oleh semua model di titik yang sama. Ini membuktikan bahwa terjadinya separasi aliran pada titik tersebut sesuai denga hasil visualisasi pola aliran separasi terjadi di rasio x/l= 0,76.
Gambar 10. Grafik Cp yang di gabungkan Selanjutnya ketika bagian rear area model
kendaraan di berikan variasi kemiringan Under Rear End 5o , 10o, dan 15o membuat nilai Cp yang meningkat dari model sebelum nya sehingga dapat mengurangi tekanan rendah yang merugikan pada rear area. Dari data grafik distribusi koefisien tekanan pada kontur model kendaraan yang telah di gabung dapat disimpulkan bahwa model kendaraan di berikan variasi kemiringan Under Rear End 5o memiliki daerah tekanan rendah yang lebih kecil di bandingkan model kendaraan lainya yang telah di uji. 4. Simpulan
Berdasarkan hasil distribusi tekanan statis pada kontur body kendaraan model variasi kemiringan Under Rear End 0o pada rear area di titik pengukuran 28-30 memiliki nilai Cp sebesar Cp = -0,33 lebih rendah dari model yang memiliki variasi kemiringan Under Rear End. Dapat disimpulkan dalam penelitian ini bahwa dengan adanya variasi kemiringan Under Rear End dapat mengurangi daerah bertekanan rendah di bagian rear area kendaraan. Berdasarkan grafik Cp kendaraan model variasi kemiringan Under Rear End 5o yang terbaik dari semua model uji karena memiliki daerah bertekanan rendah di bagian rear area yang ditandai dengan nilai Cp = -0,1 dan pada bagian Under Rear End memiliki daerah bertekanan rendah yang lebih kecil dibandingkan dengan model lainya.
Daftar Pustaka
[1] Sutantra, I Nyoman. 2001. Teknologi Otomitif : Teori danAplikasinya. Surabaya : Guna Widya [2] Jhon D. Anderson, Jr, (2005), Fundamental Of Aerodynamic, Fifth Edition, McGraw-Hill, International Edition. [3] Bruce R. Munson, (2010), Fundamental Of Fluid Mechanics, Six Edition, John Wiley and Sons, Inc [4] White, F.M, (1998), Fluid Mechanics, USA, McGraw-Hill [5] Cahyaningsih Wilujeng, (2016), “Studi Eksperimen Karakteristik Aliran Melintasi Silinder Sirkular Berpengganggu Prisma Segitiga Samasisi, Prisma Segi Empat, dan Silinder Sirkular”, Tugas Akhir

I G N Bagus Jaya Rusyana et al. · Prosiding KNEP Xl – 2021 · ISSN 2338-414X 63
Jurusan Teknik Mesin Fakultas Teknologi Industri Insitut Teknologi Sepuluh November, Surabaya [6] Widiarta, I Putu. 2020. Kajian eksperimen pola aliran udara 2-d yang melintasi kendaraan model. Tugas Akhir Jurusan Teknik Mesin Fakultas Teknik Universitas Udayana,Bali. [7] Adi Usada, I Wayan. 2020. Visualisasi Fenomena Fisik Aerodinamika Suatu Kendaraan Model. Tugas Akhir Jurusan Teknik Mesin Fakultas Teknik Universitas Udayana,Bali.
I Gusti Ngurah Bagus Jaya Rusyana merupakan seorang mahasiswa yang menyelesaikan studi S1 di Program Studi Teknik Mesin, Universitas Udayana pada tahun 2021. Konsentrasi yang diminati adalah topik yang berkaitan dengan konversi energi yaitu pada bidang aerodinamika dan mekanika fluida.