partie technologie mecanique new
TRANSCRIPT
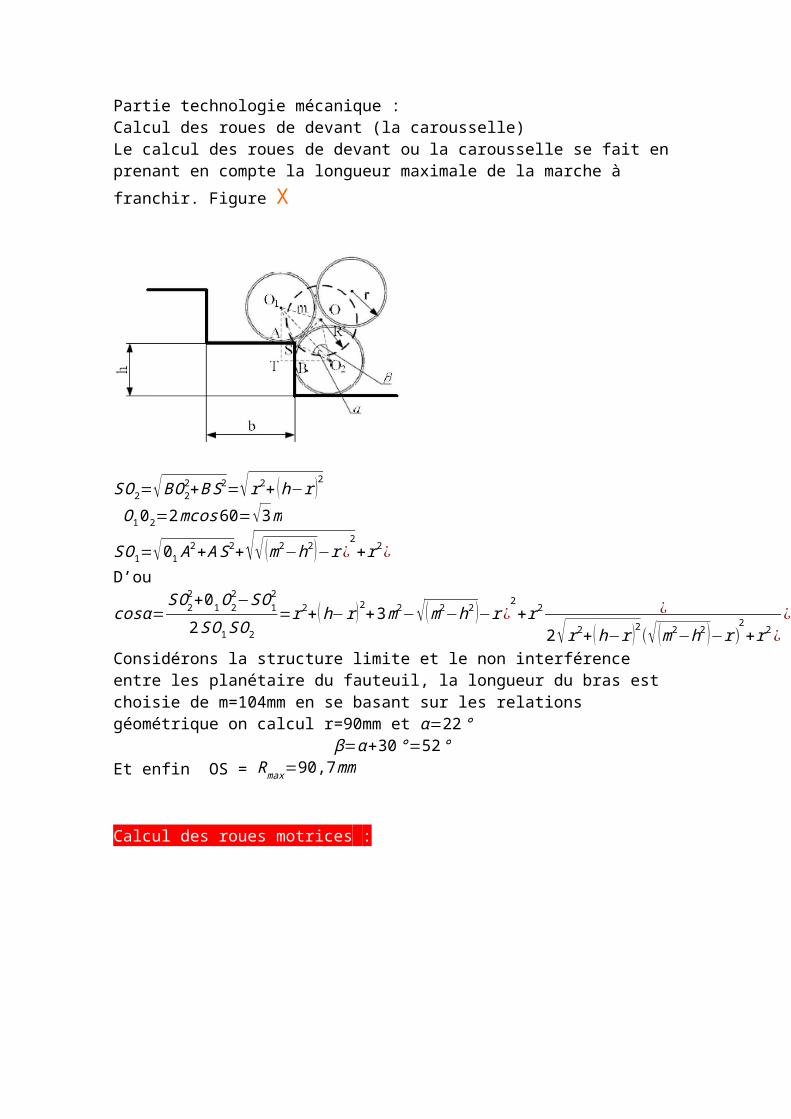
Partie technologie mécanique : Calcul des roues de devant (la carousselle)Le calcul des roues de devant ou la carousselle se fait enprenant en compte la longueur maximale de la marche à franchir. Figure X
SO2=√BO22+BS2=√r2+ (h−r )2
O102=2mcos60=√3mSO1=√01A2+AS2+√√ (m2−h2)−r ¿
2+r2¿
D’ou
cosα=SO2
2+01O22−SO1
2
2SO1SO2=r2+(h−r)2+3m2−√(m2−h2 )−r ¿
2+r2 ¿
2√r2+(h−r )2(√ (m2−h2 )−r)2+r2 ¿
¿
Considérons la structure limite et le non interférence entre les planétaire du fauteuil, la longueur du bras est choisie de m=104mm en se basant sur les relations géométrique on calcul r=90mm et α=22°
β=α+30°=52°Et enfin OS = Rmax=90,7mm
Calcul des roues motrices :
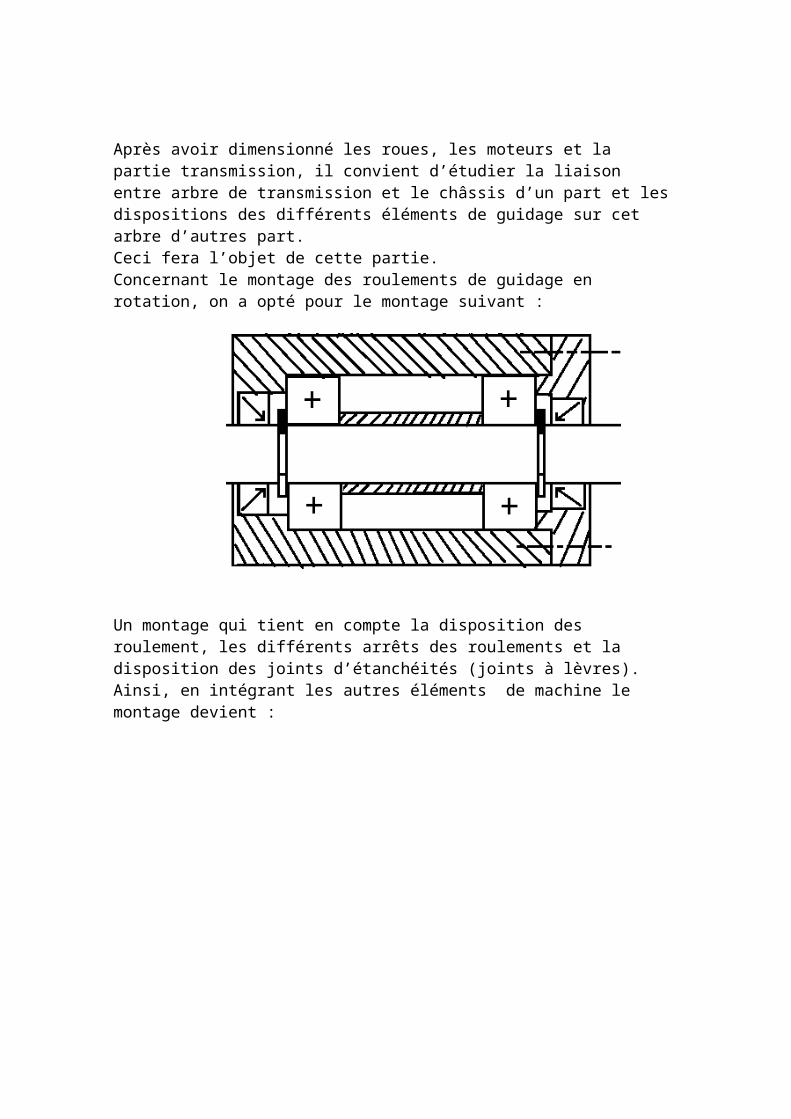
Après avoir dimensionné les roues, les moteurs et la partie transmission, il convient d’étudier la liaison entre arbre de transmission et le châssis d’un part et lesdispositions des différents éléments de guidage sur cet arbre d’autres part.Ceci fera l’objet de cette partie.Concernant le montage des roulements de guidage en rotation, on a opté pour le montage suivant :
Un montage qui tient en compte la disposition des roulement, les différents arrêts des roulements et la disposition des joints d’étanchéités (joints à lèvres).Ainsi, en intégrant les autres éléments de machine le montage devient :
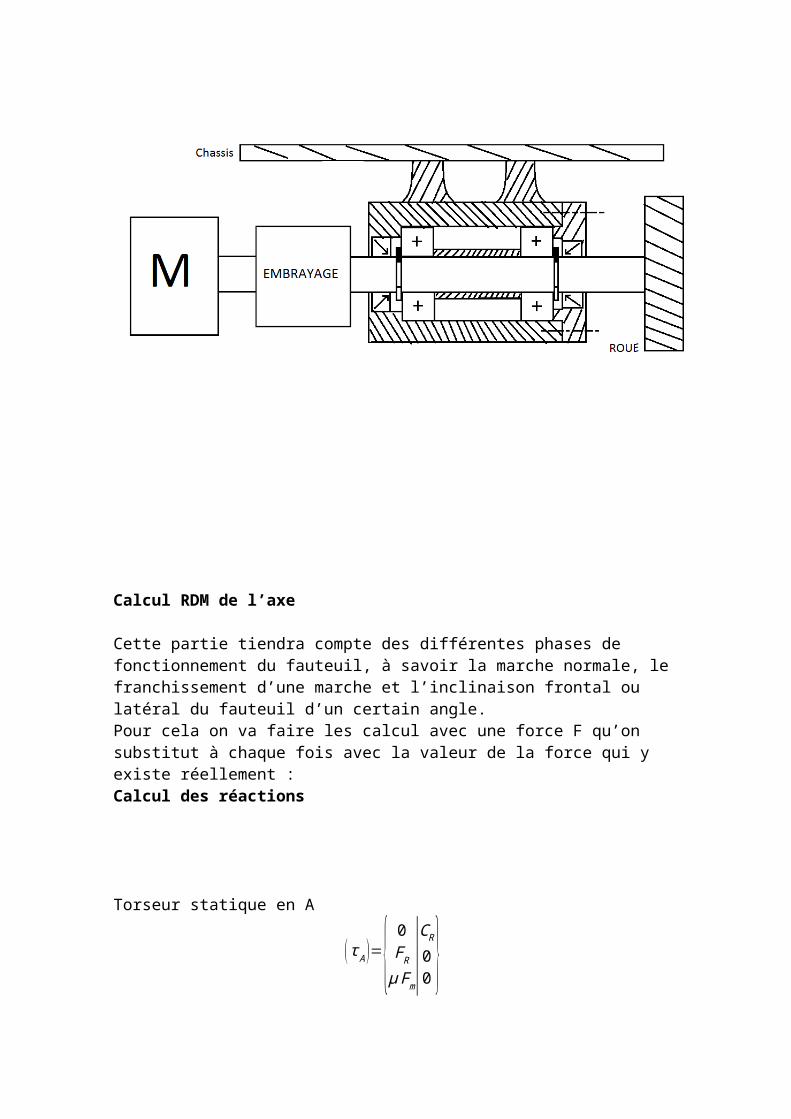
Calcul RDM de l’axe
Cette partie tiendra compte des différentes phases de fonctionnement du fauteuil, à savoir la marche normale, lefranchissement d’une marche et l’inclinaison frontal ou latéral du fauteuil d’un certain angle.Pour cela on va faire les calcul avec une force F qu’on substitut à chaque fois avec la valeur de la force qui y existe réellement :Calcul des réactions
Torseur statique en A
(τA )={ 0FRμFm|
CR00 }
Avec : FR : l’effort du sol sur la roue égal au quart du
poids total (utilisateur+ fauteuil) FR=P/4 Fm : l’effort du moteur au point de contact entre
roue et sol μ : coefficient de frottement
Torseur statique en B
(τB )={XB
YBZB
|000}Torseur statique en C
(τC )={0YC
Zc|000}
Torseur statique en D
(τB )={000|Cm
00 }
avec Cm le couple moteur
On ramène tous les torseurs les torseurs et application du PFS
Ce qui donne les équations
XA=0
YB+YC=FR
ZB+ZC=μFm
Zc=aμFm
b

Yc=aFRb
ZB=(b−a)μFm
b
YB=(b−a)FR
b
Calcul du tenseur de cohésion :
On réalise une coupe entre A et B en point d’abscisse x
x∈ [0,a ]
(τCoh )=−(τA )G
M⃗G=M⃗A+ G⃑AΛ F⃑
(τCoh )={ 0−FR
−μFm|Cm
xμFm−xFR
}On réalise une coupe entre B et C en point d’abssice x
x∈ [a,b ]
(τCoh )=−(τA )G−(τB )G
¿ { O−FR.
ab
−μFm.ab| Cmx abμFm+μaFm
−x abFR+aFR
}On réalise une coupe entre C et D en point d’abscisse x
x∈ [b,c ]
(τCoh )=(τD )G
¿ {000|Cm
00 }
( diagrammes des couples )
La section la plus sollicitée est la section en B d’abscisse x=a
Alors :
σfy,max=32mfy,max
πd3
σfy,max=32aFRπd3
σfz,max=32mfz,max
πd3
σfz,max=32aμFm
πd3 =¿
τmax=16mf,maxπd3
τmax=16Cmπd3
Enfin on néglige les efforts de cisaillementOn calcul la contrainte équivalente par le critère de Von MISES
σmax,éq=√(σ¿¿fy,max2+σfz,max2 )+3τmax
2 ¿

¿ 1πd3 √(32a )2 ¿¿
¿1πd3 .α
α=√(32a )2(FR2+(μFm )2)+3.(16Cm )2
Et enfin pour que notre section tienne on doit vérifier larelation
σmax,éq<Re
S
d> 3√ αSReπ
=dmin
Or la puissance du moteur est de 150W et tourne d’une vitesse de 10,47 rad/s Ce qui donne un couple de 14,32 N.m, le rayon de la roue motrice est de 160 mm de rayon, il développe alors une force de Fm= 90 N La masse totale du fauteuil est estimée à 160Kg, cela implique un poids de 1600N soit 400N/ roue FR= 400NOn prenant a = 50 mm Et En choisissant l’acier à usage courant l’acier E24 de limite élastique Re =235MPa, et en donnant le coefficient de sécurité égale à 2 On trouve : un diamètre minimal de :
d> 3√ αSReπ
=dmin
dmin=13mm
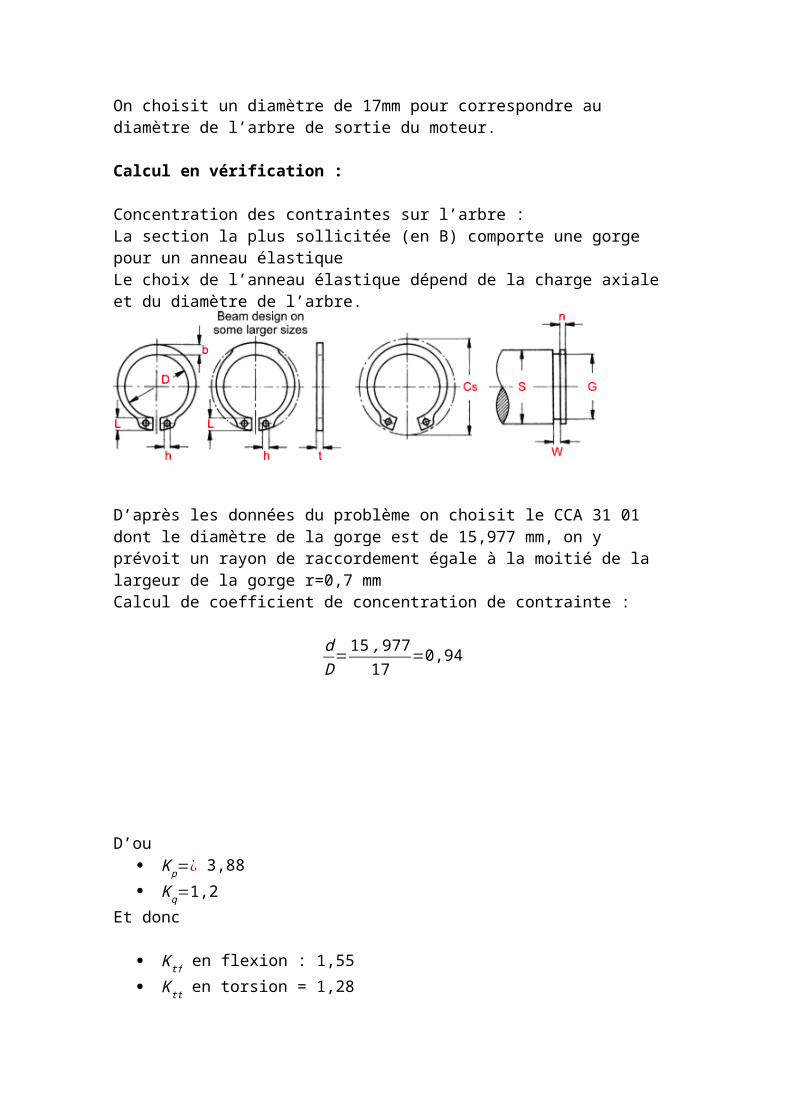
On choisit un diamètre de 17mm pour correspondre au diamètre de l’arbre de sortie du moteur.
Calcul en vérification :
Concentration des contraintes sur l’arbre :La section la plus sollicitée (en B) comporte une gorge pour un anneau élastique Le choix de l’anneau élastique dépend de la charge axiale et du diamètre de l’arbre.
D’après les données du problème on choisit le CCA 31 01 dont le diamètre de la gorge est de 15,977 mm, on y prévoit un rayon de raccordement égale à la moitié de la largeur de la gorge r=0,7 mm Calcul de coefficient de concentration de contrainte :
dD=15,977
17=0,94
D’ou Kp=¿ 3,88 Kq=1,2
Et donc
Ktf en flexion : 1,55 Ktt en torsion = 1,28

D’ou la nouvelle contrainte équivalente :
σmax,éq=√(σ¿¿fy,max2+σfz,max2 )+3τmax
2 ¿
¿ 1πd3 √(32aKtf )2¿¿
¿65MPa
D’ou s'=Re
σmax,éq=65235
=3,67>2
s'>s
Le diamètre de l’arbre est validé en statique d’après le calcul de vérification
Vérification en dynamique (rupture par fatigue)
La contrainte en torsion est constanteLa contrainte de flexion tourne avec l’arbre elle correspond à la contrainte alternative.Contraintes équivalentes :
σa,eq=Ktf √σfy,max2 +σfz,max
2 =64,32MPa
σm,eq=√3.τt2=26MPa
DETERMINATION DES χ
Les contraintes sont combinées, il convient de calcul sa valeur pour chaque contrainte
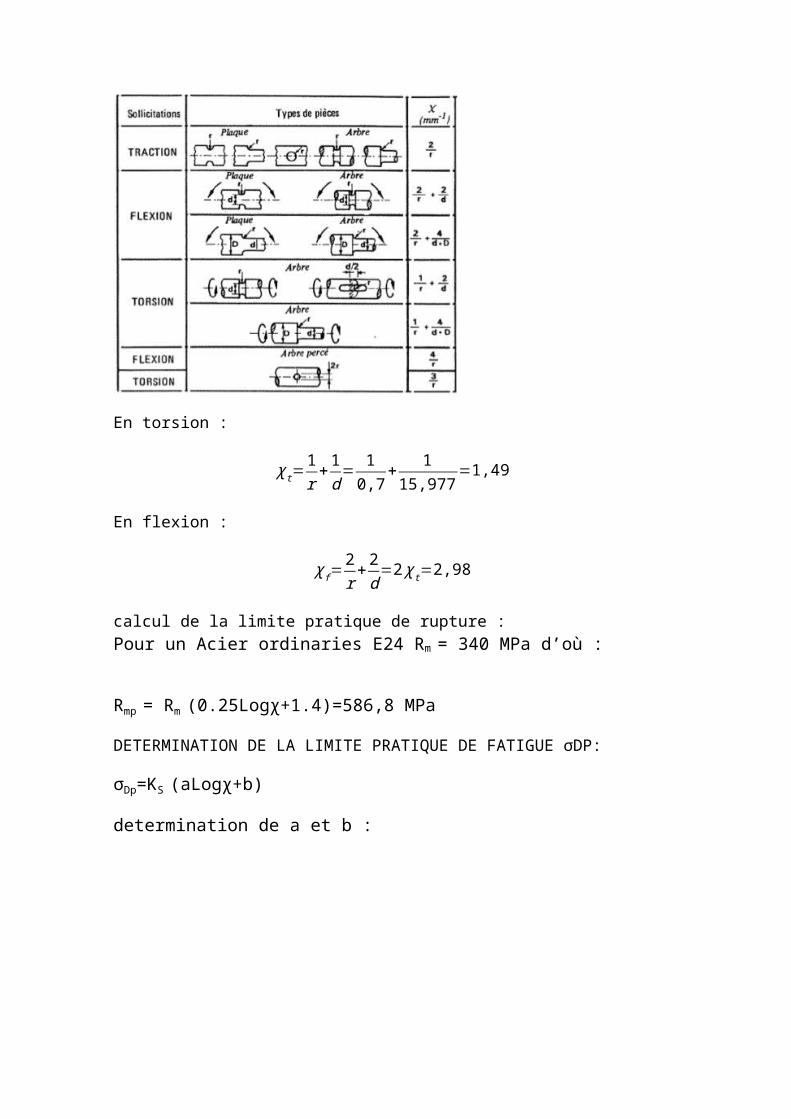
En torsion :
χt=1r
+1d= 10,7
+ 115,977
=1,49
En flexion :
χf=2r
+2d=2χt=2,98
calcul de la limite pratique de rupture :Pour un Acier ordinaries E24 Rm = 340 MPa d’où :
Rmp = Rm (0.25Logχ+1.4)=586,8 MPa
DETERMINATION DE LA LIMITE PRATIQUE DE FATIGUE σDP:
σDp=KS (aLogχ+b)
determination de a et b :
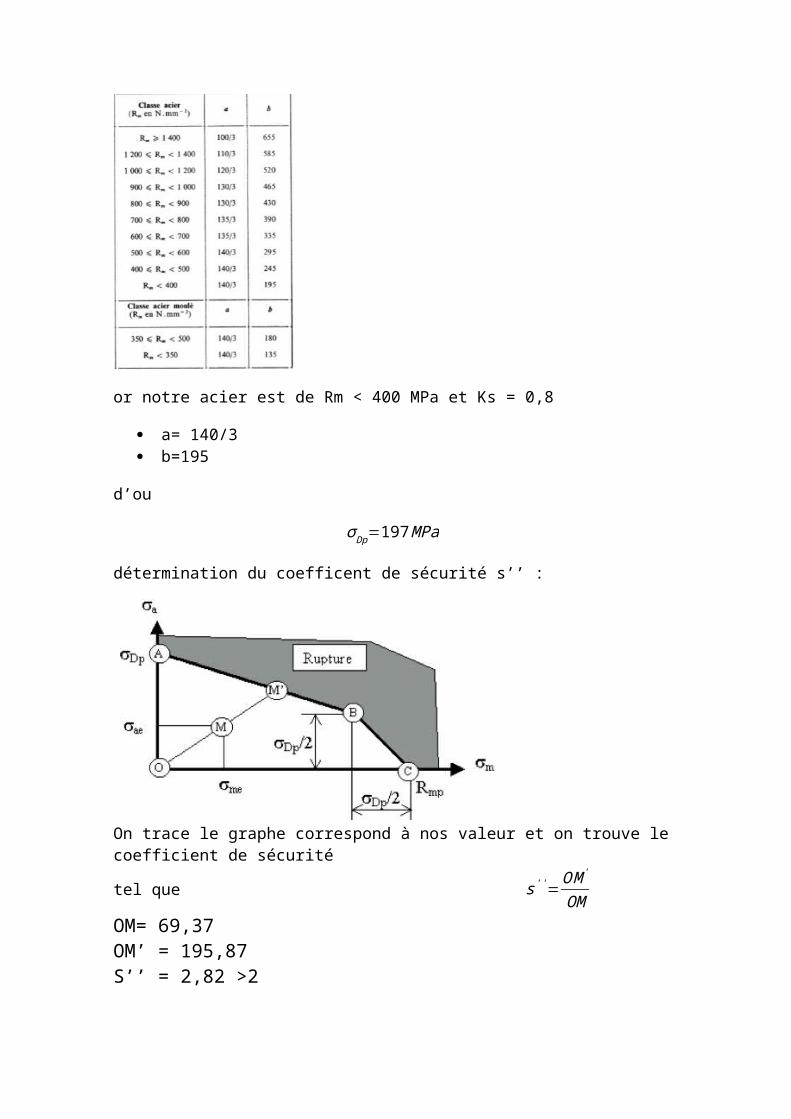
or notre acier est de Rm < 400 MPa et Ks = 0,8
a= 140/3 b=195
d’ou
σDp=197MPa
détermination du coefficent de sécurité s’’ :
On trace le graphe correspond à nos valeur et on trouve lecoefficient de sécurité
tel que s''=OM'
OMOM= 69,37 OM’ = 195,87S’’ = 2,82 >2
Le calcul de vérification en dynamique valide le diamètre de l’arbre L’arbre résiste aussi bien aux sollicitations statiques qu’aux sollicitations dynamiques.
Choix des roulements :La configuration de montage de roulements montre que les efforts primordiaux sont les efforts radiaux, tandis que les efforts axiaux sont faibles voire nuls.Les roulements retenus sont des roulements a rangée de billes a contact radial.Les fournisseurs de roulements sont nombreux ainsi que leurs offres, notamment le fournisseur FSK, qui offre des roulements à la fois rigides et avec un cout relativement plus faible.Donnée et critères de choix :
Diamètre intérieur : 17mm Efforts 200 N Encombrement : 90 mm pour tout le montage de
roulements.
D’après le catalogue SKF nous avons retenue la BB-6003-B180-10GL-B180
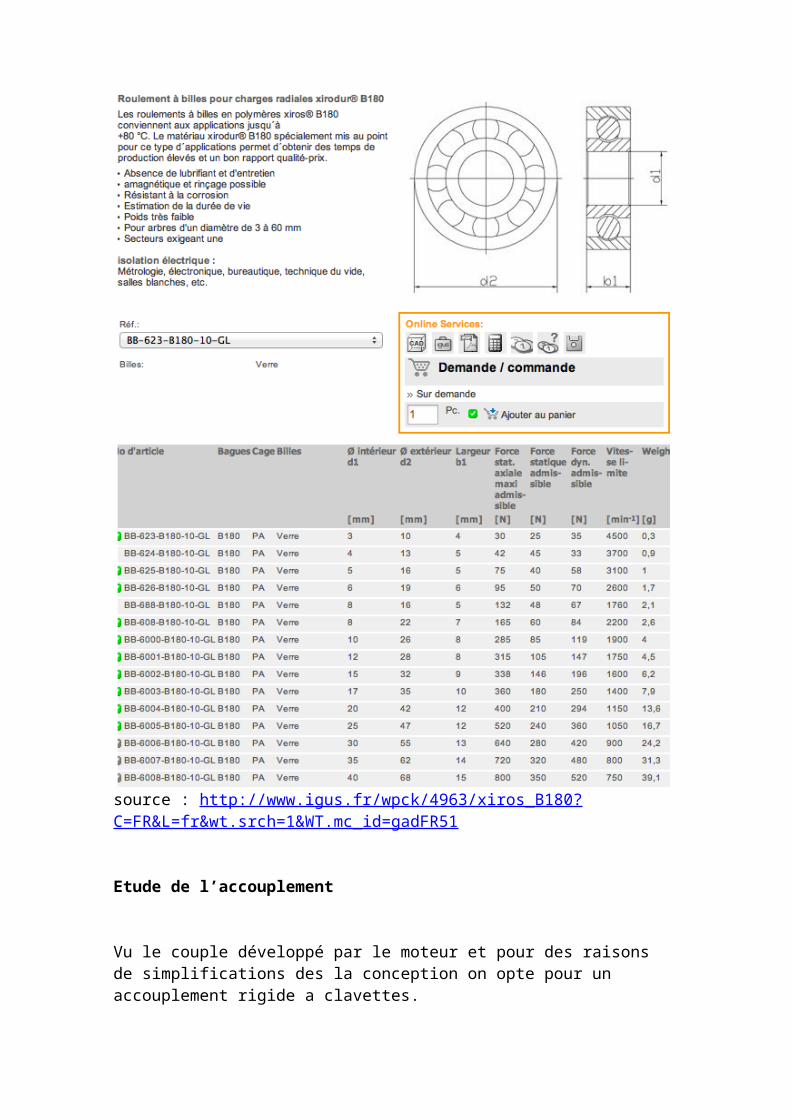
source : http://www.igus.fr/wpck/4963/xiros_B180?C=FR&L=fr&wt.srch=1&WT.mc_id=gadFR51
Etude de l’accouplement
Vu le couple développé par le moteur et pour des raisons de simplifications des la conception on opte pour un accouplement rigide a clavettes.
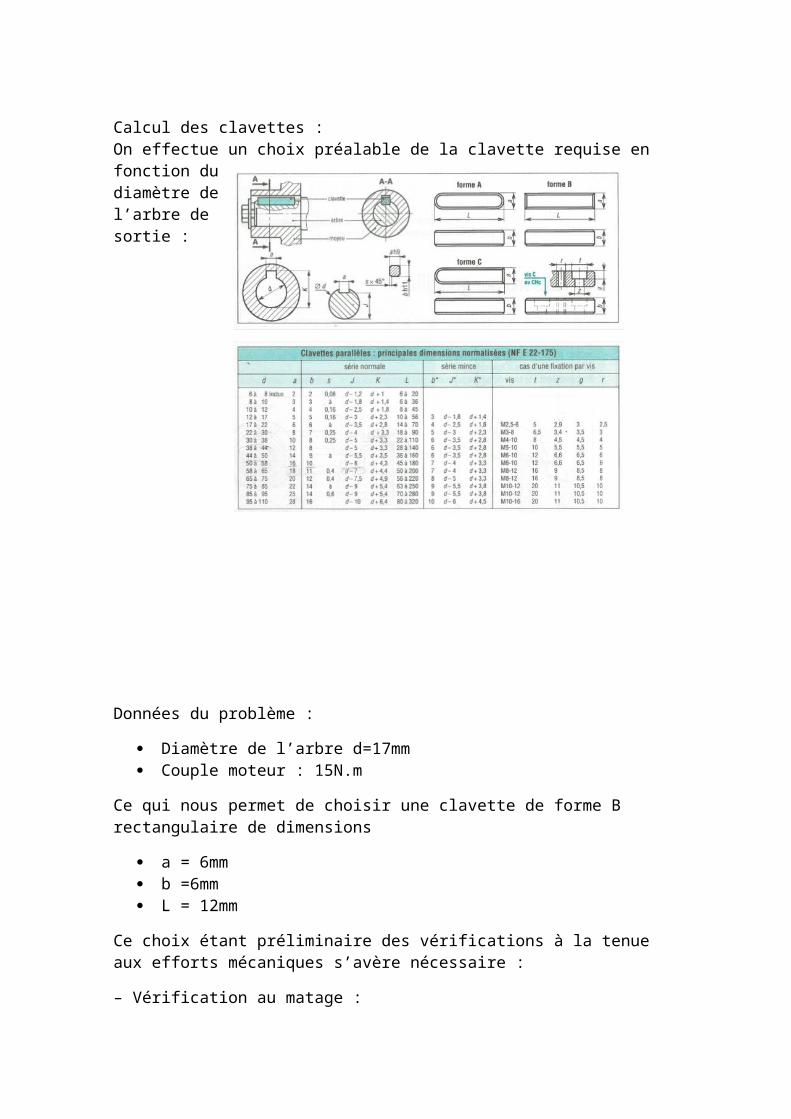
Calcul des clavettes :On effectue un choix préalable de la clavette requise en fonction dudiamètre del’arbre desortie :
Données du problème :
Diamètre de l’arbre d=17mm Couple moteur : 15N.m
Ce qui nous permet de choisir une clavette de forme B rectangulaire de dimensions
a = 6mm b =6mm L = 12mm
Ce choix étant préliminaire des vérifications à la tenue aux efforts mécaniques s’avère nécessaire :
– Vérification au matage :
Pour qu’une clavette résiste au matage, il faut que la pression de matage P soit < ou = à la pression admissible Pa. Pour vérifier cette condition , il suffit de dérouler les calculs ci-dessous :
Surface matée Sm (mm²) :Sm = (b x L) / 2 avec b = hauteur de la clavetteen mm et L = longueur de la clavette en mm.
Sm = 36mm^2 Effort appliqué sur la clavette F (N) :
F = 2C / D avec C = couple dans l’arbre en N.mm et D = diamètre de l’arbre en mm.
F = 1700 N Pression de matage Pm (MPa) :
Pm = F / Sm Pm = 49 MPa
Pression admissible Pa (MPA) :Clavetage glissant sous charge : 2 à 20 MPaClavetage glissant sans charge : 20 à 50 MPaClavetage fixe (cas le plus fréquent) : 40 à 150MPa
Notre clavette tiendra alors pour le mattage.– Vérification au cisaillement :
Pour qu’une clavette résiste en cisaillement, il faut que la contrainte τ soit < ou = à Rpg. Pour vérifier cette condition, il suffit de dérouler les calculs ci-dessous :
Surface cisaillée Sc (mm²) :Sc = a x L avec a = largeur de la clavette en mm et L = longueur de la clavette en mm.
Sc = 72 mm^2Effort appliqué sur la clavette F (N) :
F = 2C / D avec C = couple dans l’arbre en N.mm et D = diamètre de l’arbre en mm.
F = 1700 NContrainte de cisaillement τ (MPa) :
τ = F / Sc = 2C / aLD <= Rpg avec Rpg = résistance pratique élastique au glissement (ou cisaillement)
Rpg = Rg / s avec s = coefficient de sécurité (généralement = à 2).
τ = 24MPa
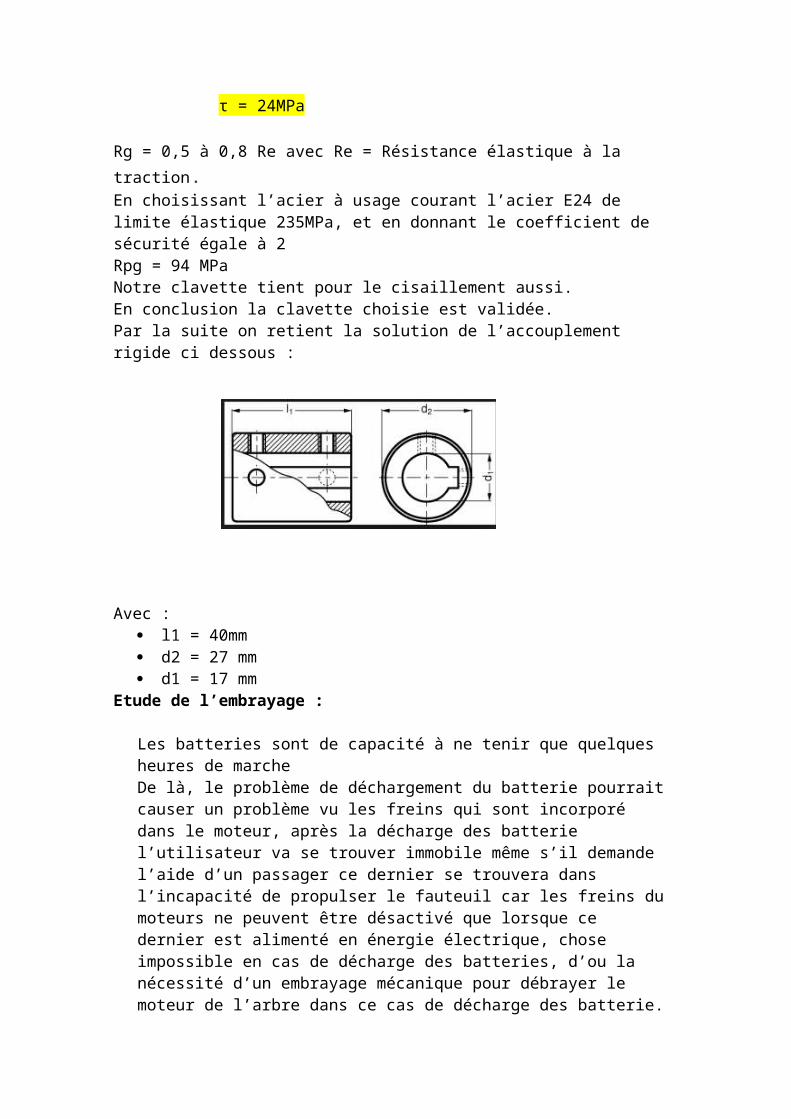
Rg = 0,5 à 0,8 Re avec Re = Résistance élastique à la traction.En choisissant l’acier à usage courant l’acier E24 de limite élastique 235MPa, et en donnant le coefficient de sécurité égale à 2 Rpg = 94 MPa Notre clavette tient pour le cisaillement aussi.En conclusion la clavette choisie est validée. Par la suite on retient la solution de l’accouplement rigide ci dessous :
Avec : l1 = 40mm d2 = 27 mm d1 = 17 mm
Etude de l’embrayage :
Les batteries sont de capacité à ne tenir que quelques heures de marcheDe là, le problème de déchargement du batterie pourraitcauser un problème vu les freins qui sont incorporé dans le moteur, après la décharge des batterie l’utilisateur va se trouver immobile même s’il demande l’aide d’un passager ce dernier se trouvera dans l’incapacité de propulser le fauteuil car les freins dumoteurs ne peuvent être désactivé que lorsque ce dernier est alimenté en énergie électrique, chose impossible en cas de décharge des batteries, d’ou la nécessité d’un embrayage mécanique pour débrayer le moteur de l’arbre dans ce cas de décharge des batterie.
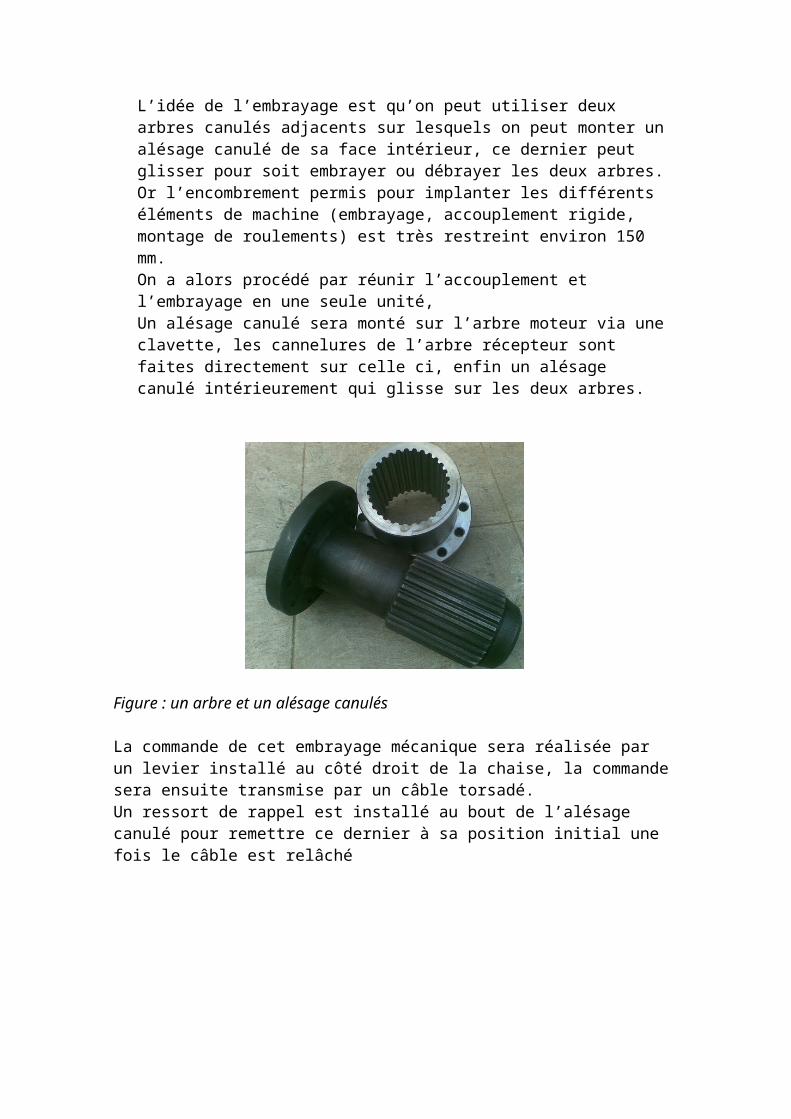
L’idée de l’embrayage est qu’on peut utiliser deux arbres canulés adjacents sur lesquels on peut monter unalésage canulé de sa face intérieur, ce dernier peut glisser pour soit embrayer ou débrayer les deux arbres.Or l’encombrement permis pour implanter les différents éléments de machine (embrayage, accouplement rigide, montage de roulements) est très restreint environ 150 mm.On a alors procédé par réunir l’accouplement et l’embrayage en une seule unité, Un alésage canulé sera monté sur l’arbre moteur via uneclavette, les cannelures de l’arbre récepteur sont faites directement sur celle ci, enfin un alésage canulé intérieurement qui glisse sur les deux arbres.
Figure : un arbre et un alésage canulés
La commande de cet embrayage mécanique sera réalisée par un levier installé au côté droit de la chaise, la commandesera ensuite transmise par un câble torsadé.Un ressort de rappel est installé au bout de l’alésage canulé pour remettre ce dernier à sa position initial une fois le câble est relâché
A rajouter à la partie commande (direction par deux servomoteurs)
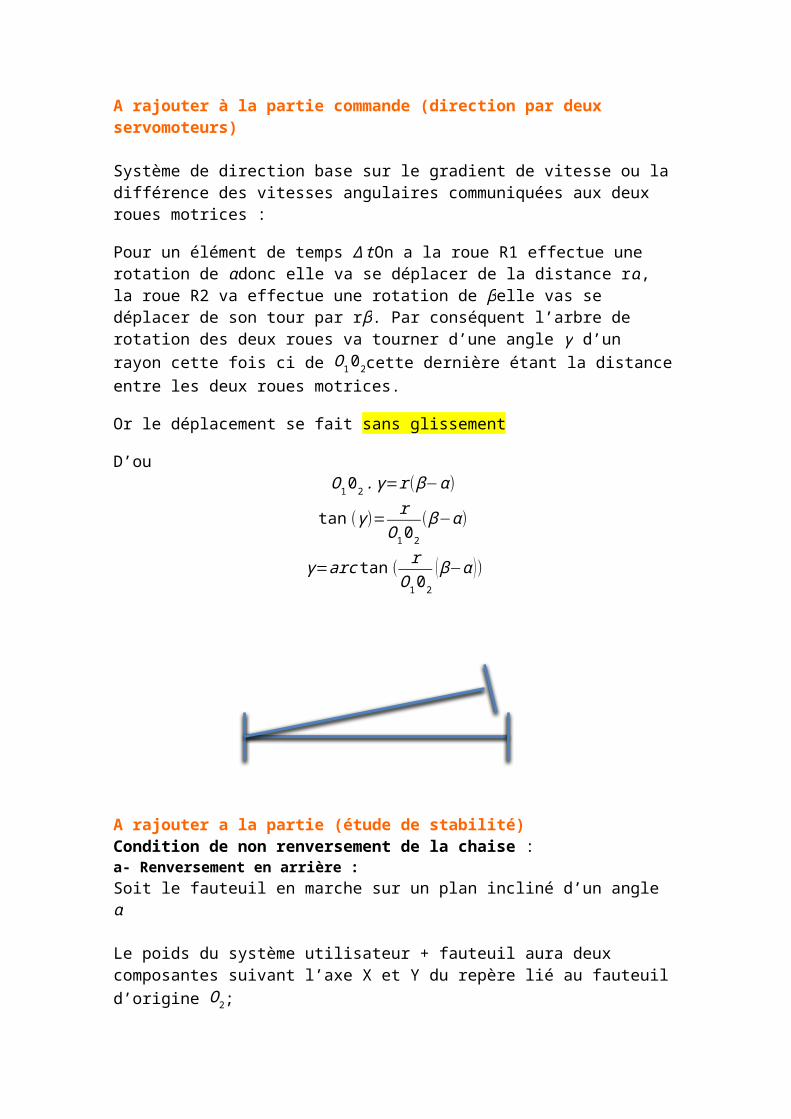
Système de direction base sur le gradient de vitesse ou ladifférence des vitesses angulaires communiquées aux deux roues motrices :
Pour un élément de temps ΔtOn a la roue R1 effectue une rotation de αdonc elle va se déplacer de la distance rα, la roue R2 va effectue une rotation de βelle vas se déplacer de son tour par rβ. Par conséquent l’arbre de rotation des deux roues va tourner d’une angle γ d’un rayon cette fois ci de O102cette dernière étant la distanceentre les deux roues motrices.
Or le déplacement se fait sans glissement
D’ouO102.γ=r(β−α)
tan (γ)= rO102
(β−α)
γ=arctan ( rO102
(β−α ))
A rajouter a la partie (étude de stabilité)Condition de non renversement de la chaise : a- Renversement en arrière :Soit le fauteuil en marche sur un plan incliné d’un angleα
Le poids du système utilisateur + fauteuil aura deux composantes suivant l’axe X et Y du repère lié au fauteuild’origine O2;

La force d’entrainement F étant appliquée en O2, son couple autour de l’axe Z à ce point est nul.Le couple en ce point de la composante tangentielle du poids du système a tendance a renverser le fauteuil, tandis que le couple de se composante normale à tendance à
stabiliser le fauteuil. P={−psin(α)−pcos(α)
0La condition s’avère immédiate dans ce cas Pour des raisons de calculs de conception le centre de
gravité {abcAu moment de basculement les roues de devant vont perdre le contact avec le sol d’ou l’annulations de leurs réaction avec le sol. On établit le PFD sur le fauteuil et on trouve :
−apcos (α )+bpsin (α )=0p (bsin (α )−acos (α ))=0
La conditions portera alors seulement sur a, b,α tel que :
acos (α )>bsin (α )
Enfin tan(α)<
ab
α<arctan (ab
)
Hauteur limite H, qui causera le renversement en arrière :
On a tan (α )=HL
Hmax=Ltan(α)
Hmax=L.ab
L étant la longueur de la chaise.Remarque : l’inclinaison des roues de sécurité qui retientle fauteuil en cas de renversement doit être légèrement plus petite que cet angle α.
b- renversement latéral :
Lorsque le fauteuil traverse un plan incliné ou l’une des roues ou les deux roues de coté gauche ou droite le fauteuil s’incline autour de l’axe X Nous étudiants dans ce paragraphe la condition de non renversement latéral du fauteuil.Le poids du système utilisateur + fauteuil aura deux composantes suivant l’axe Y et Z du repère lié au fauteuild’origine O;Le couple en ce point de la composante suivant Z du poids du système a tendance a renverser le fauteuil, tandis que le couple de se composante suivant Y à tendancea stabiliser le système.
P={−−¿−pcos(φ)−psin(φ)
Au moment de basculement les roues de coté droite/ gauche vont perdre le contact avec le sol d’ou l’annulations de leurs réaction avec le sol. On établit le PFD sur le fauteuil et on trouve :
−l2pcos (αφ)+bpsin (φ )=0
l étant la largeur du fauteuil roulant.p (bsin (φ)−lcos (φ ))=0
La conditions portera alors seulement sur l , b,φ tel que :l étant la largeur du fauteuil
l2cos (φ )>bsin (φ )
Enfintan(φ)<
l2b
φ<arctan ( l2b
)
Hauteur S limite qui causera le renversement en arrière :
On a tan (α )=Sl
Smax=ltan(φ)
