on the navigation route safety analysis of a tanker ship in the black sea area, based on seakeeping...
TRANSCRIPT

THE ANNALS OF “DUNAREA DE JOS” UNIVERSITY OF GALATI FASCICLE XI – SHIPBUILDING. ISSN 1221-4620
2013
© Galati University Press, 2013
ON THE NAVIGATION ROUTE SAFETY ANALYSIS OF A TANKER SHIP IN THE BLACK SEA AREA, BASED ON
SEAKEEPING CRITERIA
Carmen Gasparotti “Dunarea de Jos” University of Galati,
Faculty of Naval Architecture, Galati, Domneasca Street, No. 47, 800008, Romania,
E-mail: [email protected]
Leonard Domnisoru “Dunarea de Jos” University of Galati,
Faculty of Naval Architecture, Galati, Domneasca Street, No. 47, 800008, Romania,
E-mail: [email protected] George Jagite
“Dunarea de Jos” University of Galati, Faculty of Naval Architecture, Galati, Domneasca
Street, No. 47, 800008, Romania, E-mail: [email protected]
ABSTRACT
The objective of the present work is to perform an analysis for the selected shipping routes between various destinations, taking into account the seakeeping safety criteria. The analysis of navigation conditions in rough sea situations, when extreme seakeeping conditions occur in terms of amplitudes and accelerations on vertical, pitch and roll oscillations, is done based on scenarios for three navigation routes of an oil tanker ship of 15000 dwt. The navigation routes scenarios include eight significant points in the Black Sea area, being selected the reference period 03.02-08.02.2005, with every three hours records, when extreme sea state conditions occur. The study concluded that for the ship's service speed of 10 knots, the routes can be taken selected without any navigation restrictions. At the ship speed in-crease from 10 to 15 knots, on the analysed routes occur navigation restrictions, mainly due to the limit seakeeping criteria on the roll oscillation amplitude.
Keywords: navigation route scenarios, seakeeping safety criteria, oil tanker ship, Black Sea area
1. INTRODUCTION The requirements of the international
regulations [7] concerning the safety at sea, besides the structural criteria, include also the seakeeping criteria assessment in real sea state navigation conditions.
In order to enhance the seakeeping as-sessment for merchant ships it is necessary to have a detailed analysis of shipping routes between various destinations. Such analysis requires a prior study of ship behaviour in regular waves for determining of the transfer functions and the analysis for several repre-sentative sea records of the dynamic response
in irregular waves, characterized by spectral functions from experimental measurements or advanced numerical models for the entire navigation area. The assessment of safety seakeeping criteria based on a extended routes naviga-tion analysis in some sea areas, especially where navigation conditions are extreme and traffic is intense, is contributing to the reduc-tion of shipping accidents [1],[ 5].
The main objective of this study is the prediction of the most advantageous naviga-tion scenario for an oil tanker of 15000 dwt, in the Black Sea area.
Fascicle XI The Annals of “Dunarea de Jos” University of Galati
© Galati University Press, 2013
2. SELECTION OF THE POINTS IN THE BLACK SEA AREA FOR THE NAVIGATION ROUTES
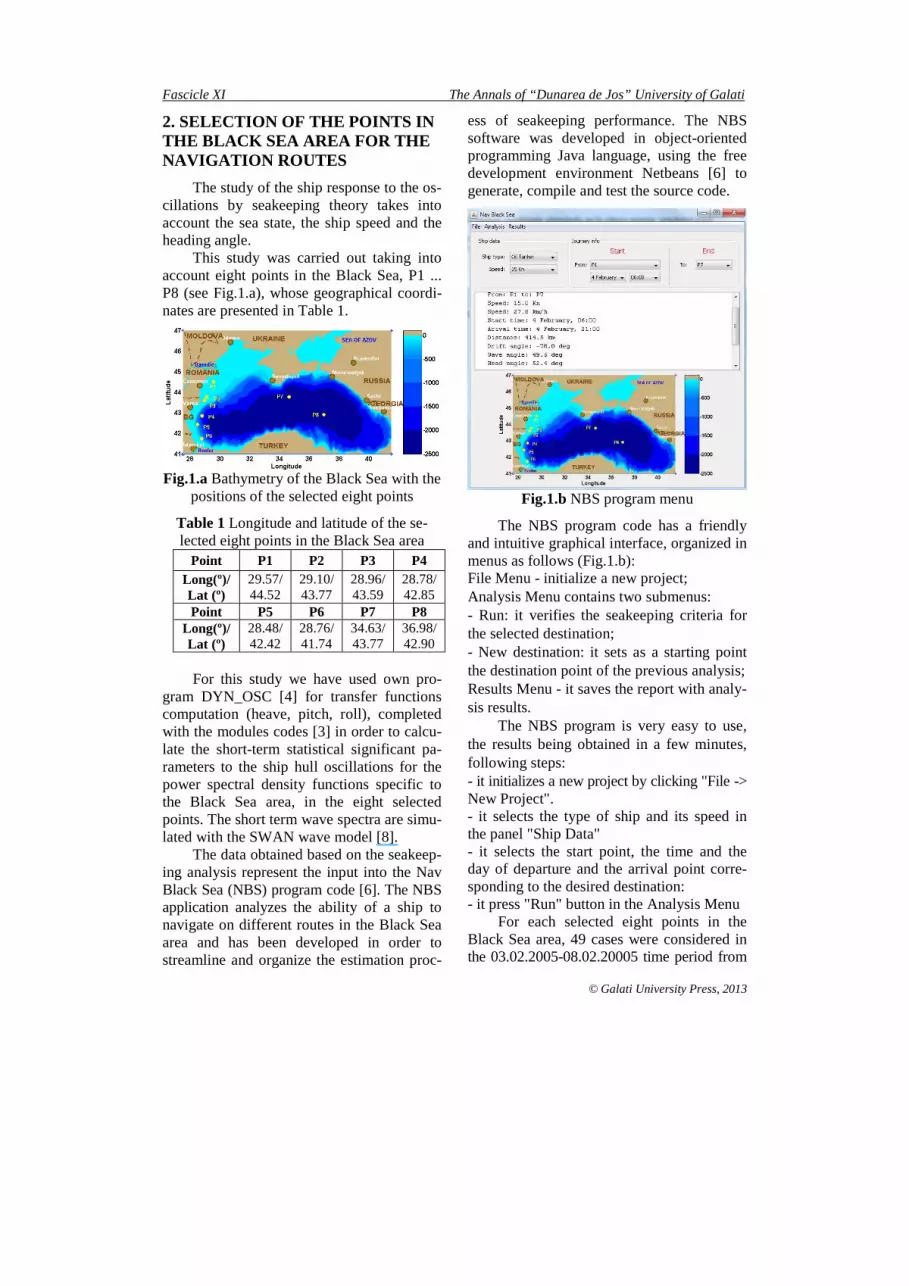
The study of the ship response to the os-cillations by seakeeping theory takes into account the sea state, the ship speed and the heading angle.
This study was carried out taking into account eight points in the Black Sea, P1 ... P8 (see Fig.1.a), whose geographical coordi-nates are presented in Table 1.
Fig.1.a Bathymetry of the Black Sea with the
positions of the selected eight points
Table 1 Longitude and latitude of the se-lected eight points in the Black Sea area
Point P1 P2 P3 P4 Long(º)/ Lat (º)
29.57/ 44.52
29.10/ 43.77
28.96/ 43.59
28.78/ 42.85
Point P5 P6 P7 P8 Long(º)/ Lat (º)
28.48/ 42.42
28.76/ 41.74
34.63/ 43.77
36.98/ 42.90
For this study we have used own pro-
gram DYN_OSC [4] for transfer functions computation (heave, pitch, roll), completed with the modules codes [3] in order to calcu-late the short-term statistical significant pa-rameters to the ship hull oscillations for the power spectral density functions specific to the Black Sea area, in the eight selected points. The short term wave spectra are simu-lated with the SWAN wave model [8].
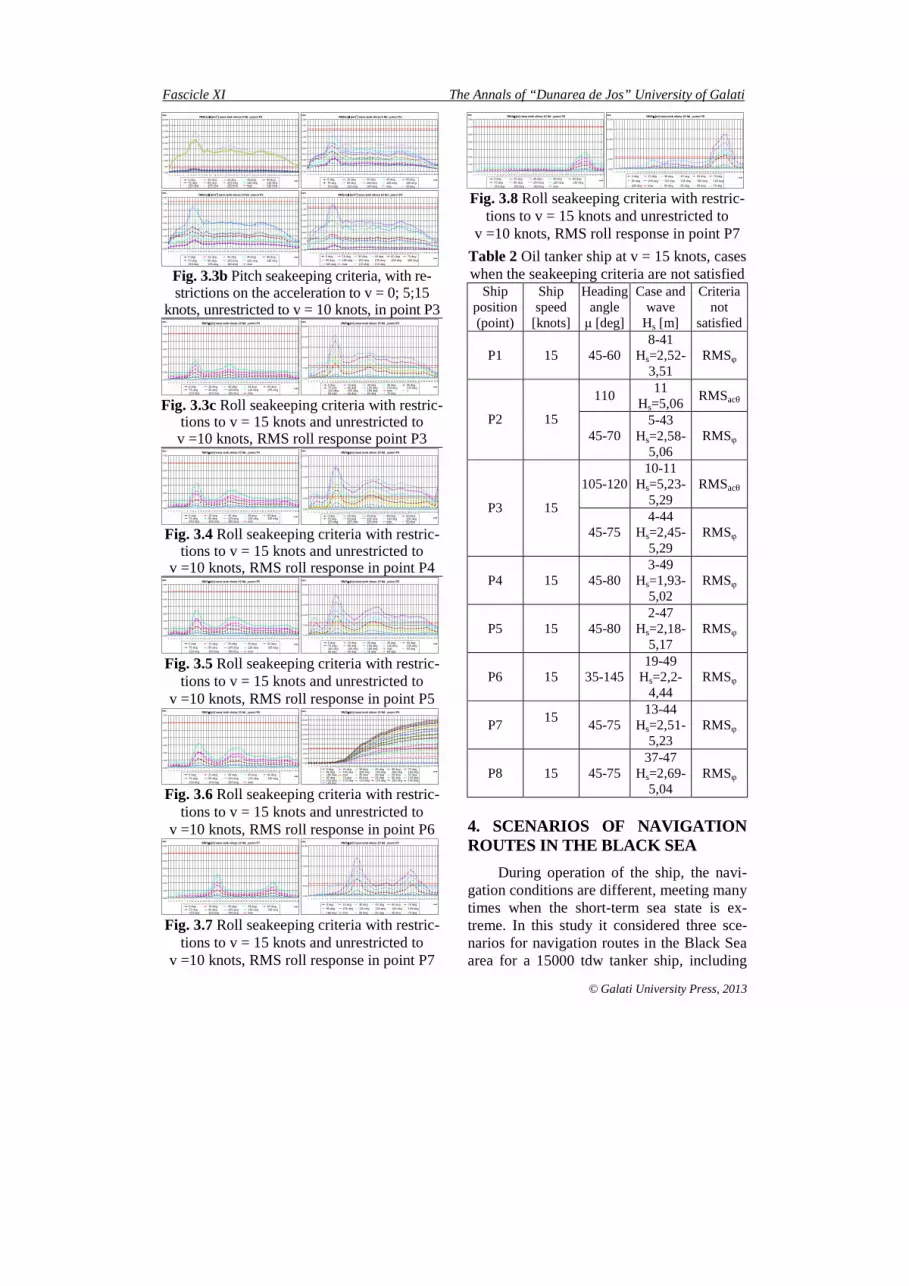
The data obtained based on the seakeep-ing analysis represent the input into the Nav Black Sea (NBS) program code [6]. The NBS application analyzes the ability of a ship to navigate on different routes in the Black Sea area and has been developed in order to streamline and organize the estimation proc-
ess of seakeeping performance. The NBS software was developed in object-oriented programming Java language, using the free development environment Netbeans [6] to generate, compile and test the source code.
Fig.1.b NBS program menu
The NBS program code has a friendly and intuitive graphical interface, organized in menus as follows (Fig.1.b): File Menu - initialize a new project; Analysis Menu contains two submenus: - Run: it verifies the seakeeping criteria for the selected destination; - New destination: it sets as a starting point the destination point of the previous analysis; Results Menu - it saves the report with analy-sis results.
The NBS program is very easy to use, the results being obtained in a few minutes, following steps: - it initializes a new project by clicking "File -> New Project". - it selects the type of ship and its speed in the panel "Ship Data" - it selects the start point, the time and the day of departure and the arrival point corre-sponding to the desired destination: - it press "Run" button in the Analysis Menu
For each selected eight points in the Black Sea area, 49 cases were considered in the 03.02.2005-08.02.20005 time period from

The Annals of “Dunarea de Jos” University of Galati Fascicle XI
© Galati University Press, 2013
0.00-21.00 hours, every three hours, for which correspond different values of the sig-nificant wave height, in order to check the oil tanker ship seakeeping criteria limits.
Wave parameters and the considered Black Sea spectra result from the SWAN [8] simulations done in this period of time. The simulation period was chosen in the 03.02. 2005-08.02.20005 period of time when val-ues of wave significant height about 5 m were achieved, corresponding to a storm de-veloped in the west sea part, followed by extremes situation in the eastern part of the Black Sea basin.
In order to characterize the sea state, for each time point were used 2D spectra (fre-quency - direction) of wave at the considered points in the Black Sea, resulted from the simulations with SWAN [8] wave model. Some of these are shown in Figs.2.1a-h, for which we chose representative data that re-veal the extreme storm condition.
Fig.2.1a
Spec2D_P1_2005 02.04_h15
Fig.2.1b Spec2D_P2_2005
02.04_h15
Fig.2.1c
Spec2D_P3_2005 02.04_h15
Fig.2.1d Spec2D_P4_2005
02.04_h15
Fig.2.1e
Spec2D_P5_2005 02.04_h15
Fig.2.1f Spec2D_P6_2005.
02.04_h15
Fig.2.1g
Spec2D_P7_2005 02.04_h15
Fig.2.1h Spec2D_P8_2005
02.04_h15
3. DYNAMIC RESPONSE OF THE 15000 TDW OIL TANKER SHIP IN THE EIGHT SIGNIFICANT POINTS FROM THE BLACK SEA AREA
Based on the DYN_OSC program [4] completed with statistical analysis modules for the Black Sea wave spectra [3] simulated with the SWAN wave model [8], there are obtained the dynamic responses of 15000 tdw oil tanker ship, at the full loading case, with speed range 0÷15 knots, in the eight reference points in the Black Sea area.
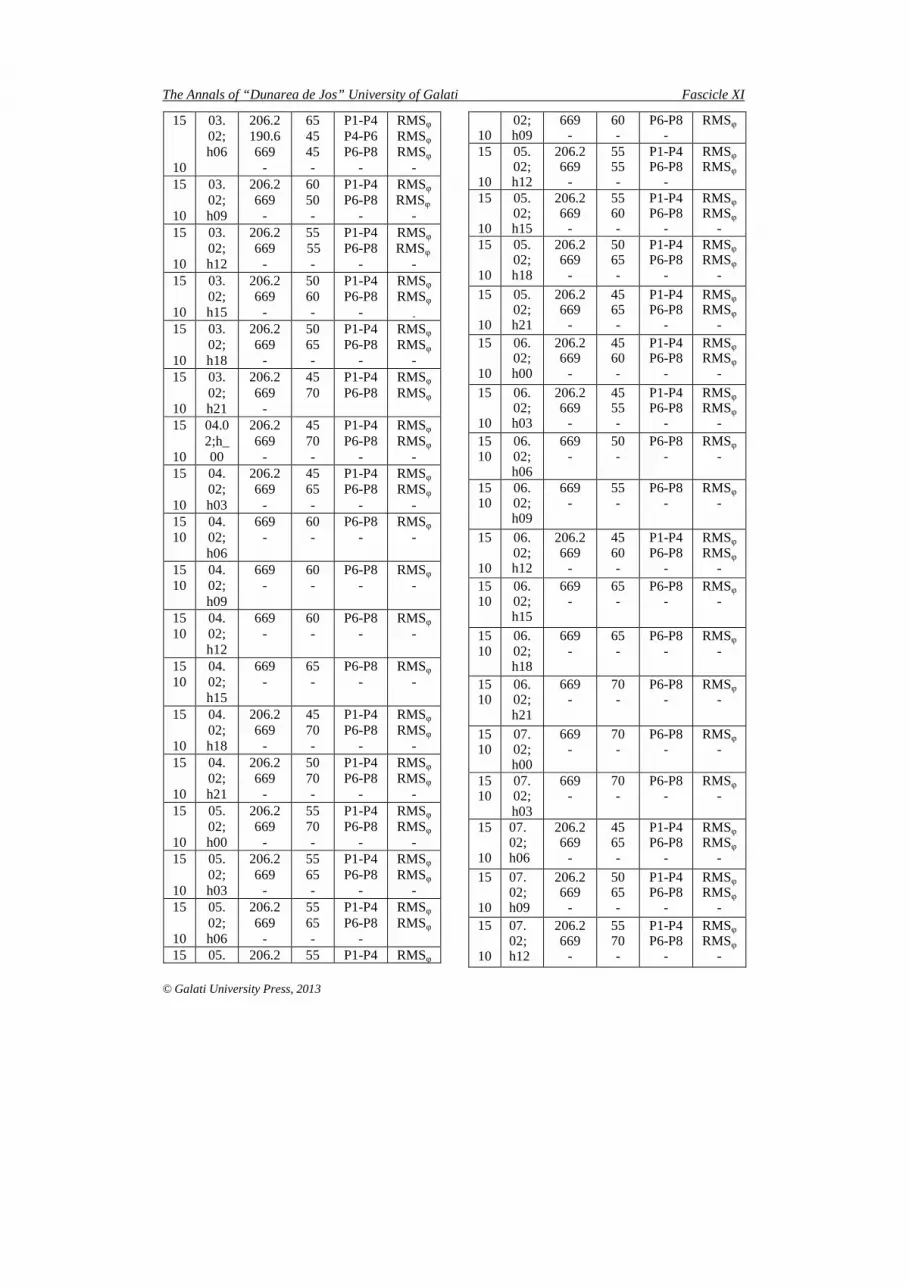
The short-term RMS values of the oil tanker ship dynamic response are compared with the seakeeping criteria limits [2], which are presented for the selected points P1-P8 from the Black Sea area in Figs 3.1-3.8 and Table 2, for the reference simulation period.
RMSφφφφ [m] nava tank viteza 10 Nd , punct P1
0.000
1.000
2.000
3.000
4.000
5.000
6.000
7.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
RMSφφφφ [m] nava tank viteza 15 Nd , punct P1
0.000
2.000
4.000
6.000
8.000
10.000
12.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg 75 deg90 deg 105 deg 120 deg 135 deg 150 deg 165 deg180 deg max 50 deg 55 deg
Fig. 3.1 Roll seakeeping criteria with restric-tions to v=15 knots and unrestricted to v=10
knots, RMS roll response in point P1 RMSacθθθθ [m/s2] nava tank viteza 10 Nd , punct P2
0.000
0.200
0.400
0.600
0.800
1.000
1.200
1.400
1.600
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
RMSacθθθθ [m/s2] nava tank viteza 15 Nd , punct P2
0.000
0.200
0.400
0.600
0.800
1.000
1.200
1.400
1.600
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg60 deg 75 deg 90 deg 105 deg120 deg 135 deg 150 deg 165 deg180 deg max Series15 110 deg
Fig. 3.2a Pitch seakeeping criteria, with re-strictions on the acceleration to v = 15 knots,
without restrictions to v =10 knots, RMS acceleration pitch response in point P2
RMSφφφφ [m] nava tank viteza 10 Nd , punct P2
0.000
1.000
2.000
3.000
4.000
5.000
6.000
7.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
RMSφφφφ [m] nava tank viteza 15 Nd , punct P2
0.000
2.000
4.000
6.000
8.000
10.000
12.000
14.000
16.000
18.000
20.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg 75 deg90 deg 105 deg 120 deg 135 deg 150 deg 165 deg180 deg max 50 deg 55 deg 65 deg 70 deg
Fig. 3.2b Roll seakeeping criteria with re-strictions to v = 15 knots and unrestricted to v =10 knots, RMS roll response in point P2
RMS θθθθ [m] nava tank viteza 10 Nd , punct P3
0.000
0.500
1.000
1.500
2.000
2.500
3.000
3.500
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
RMS θθθθ [m] nava tank viteza 15 Nd , punct P3
0.000
0.500
1.000
1.500
2.000
2.500
3.000
3.500
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
Fig. 3.3a Pitch seakeeping criteria, without restrictions to v = 10 and 15 knots,
RMS pitch response in point P3
Fascicle XI The Annals of “Dunarea de Jos” University of Galati
© Galati University Press, 2013
RMSacθθθθ [m/s2] nava tank viteza 0 Nd , punct P3
0.000
2.000
4.000
6.000
8.000
10.000
12.000
14.000
16.000
18.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max 140 deg145 deg 155 deg 160 deg 170 deg 175 deg
RMSacθθθθ [m/s2] nava tank viteza 5 Nd , punct P3
0.000
0.200
0.400
0.600
0.800
1.000
1.200
1.400
1.600
1.800
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max 35 deg
RMSacθθθθ [m/s2] nava tank viteza 10 Nd , punct P3
0.000
0.200
0.400
0.600
0.800
1.000
1.200
1.400
1.600
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
RMSacθθθθ [m/s2] nava tank viteza 15 Nd , punct P3
0.000
0.200
0.400
0.600
0.800
1.000
1.200
1.400
1.600
1.800
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg 75 deg90 deg 105 deg 120 deg 135 deg 150 deg 165 deg180 deg max 110 deg 115 deg
Fig. 3.3b Pitch seakeeping criteria, with re-strictions on the acceleration to v = 0; 5;15
knots, unrestricted to v = 10 knots, in point P3 RMSφφφφ [m] nava tank viteza 10 Nd , punct P3
0.000
1.000
2.000
3.000
4.000
5.000
6.000
7.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
RMSφφφφ [m] nava tank viteza 15 Nd , punct P3
0.000
5.000
10.000
15.000
20.000
25.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max =50 deg 55 deg 65 deg 70 deg
Fig. 3.3c Roll seakeeping criteria with restric-tions to v = 15 knots and unrestricted to v =10 knots, RMS roll response point P3
RMSφφφφ [m] nava tank viteza 10 Nd , punct P4
0.000
1.000
2.000
3.000
4.000
5.000
6.000
7.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
RMSφφφφ [m] nava tank viteza 15 Nd , punct P4
0.000
5.000
10.000
15.000
20.000
25.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max 50 degSeries16 55 deg 65 deg 70 deg 80 deg
Fig. 3.4 Roll seakeeping criteria with restric-tions to v = 15 knots and unrestricted to
v =10 knots, RMS roll response in point P4 RMSφφφφ [m] nava tank viteza 10 Nd , punct P5
0.000
1.000
2.000
3.000
4.000
5.000
6.000
7.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
RMSφφφφ [m] nava tank viteza 15 Nd , punct P5
0.000
5.000
10.000
15.000
20.000
25.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max 50 deg55 deg 65 deg 70 deg 80 deg
Fig. 3.5 Roll seakeeping criteria with restric-tions to v = 15 knots and unrestricted to
v =10 knots, RMS roll response in point P5 RMSφφφφ [m] nava tank viteza 10 Nd , punct P6
0.000
1.000
2.000
3.000
4.000
5.000
6.000
7.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
RMSφφφφ [m] nava tank viteza 15 Nd , punct P6
0.000
2.000
4.000
6.000
8.000
10.000
12.000
14.000
16.000
18.000
20.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg 75 deg90 deg 105 deg 120 deg 135 deg 150 deg 165 deg180 deg max 35 deg 40 deg 50 deg 55 deg65 deg 70 deg 80 deg 85 deg 95 deg 100 deg110 deg 110 deg 115 deg 125 deg 130 deg 140 deg145 deg
Fig. 3.6 Roll seakeeping criteria with restric-tions to v = 15 knots and unrestricted to
v =10 knots, RMS roll response in point P6 RMSφφφφ [m] nava tank viteza 10 Nd , punct P7
0.000
1.000
2.000
3.000
4.000
5.000
6.000
7.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
RMSφφφφ [m] nava tank viteza 15 Nd , punct P7
0.000
5.000
10.000
15.000
20.000
25.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg 75 deg90 deg 105 deg 120 deg 135 deg 150 deg 165 deg180 deg max 50 deg 55 deg 65 deg 70 deg
Fig. 3.7 Roll seakeeping criteria with restric-tions to v = 15 knots and unrestricted to
v =10 knots, RMS roll response in point P7
RMSφφφφ [m] nava tank viteza 10 Nd , punct P8
0.000
1.000
2.000
3.000
4.000
5.000
6.000
7.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg75 deg 90 deg 105 deg 120 deg 135 deg150 deg 165 deg 180 deg max
RMSφφφφ [m] nava tank viteza 15 Nd , punct P8
0.000
5.000
10.000
15.000
20.000
25.000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
case
RMS
0 deg 15 deg 30 deg 45 deg 60 deg 75 deg
90 deg 105 deg 120 deg 135 deg 150 deg 165 deg
180 deg max 50 deg 55 deg 65 deg 70 deg Fig. 3.8 Roll seakeeping criteria with restric-
tions to v = 15 knots and unrestricted to v =10 knots, RMS roll response in point P7
Table 2 Oil tanker ship at v = 15 knots, cases when the seakeeping criteria are not satisfied
Ship position (point)
Ship speed
[knots]
Heading angle µ [deg]
Case and wave
Hs [m]
Criteria not
satisfied
P1 15 45-60 8-41
Hs=2,52-3,51
RMSφ
110 11
Hs=5,06 RMSacθ
P2 15 45-70
5-43 Hs=2,58-
5,06 RMSφ
105-120 10-11
Hs=5,23-5,29
RMSacθ
P3 15
45-75 4-44
Hs=2,45-5,29
RMSφ
P4 15 45-80 3-49
Hs=1,93-5,02
RMSφ
P5 15 45-80 2-47
Hs=2,18-5,17
RMSφ
P6 15 35-145 19-49
Hs=2,2-4,44
RMSφ
P7 15
45-75 13-44
Hs=2,51-5,23
RMSφ
P8 15 45-75 37-47
Hs=2,69-5,04
RMSφ
4. SCENARIOS OF NAVIGATION ROUTES IN THE BLACK SEA
During operation of the ship, the navi-gation conditions are different, meeting many times when the short-term sea state is ex-treme. In this study it considered three sce-narios for navigation routes in the Black Sea area for a 15000 tdw tanker ship, including

The Annals of “Dunarea de Jos” University of Galati Fascicle XI
© Galati University Press, 2013
the eight points in the 03.02-08.02.2005 time period, from 0.00-21.00 hours, every three hours, including extreme navigation condi-tions. There have been chosen those routes where all the safety seakeeping criteria, am-plitudes and accelerations on heave, pitch and roll [2], are satisfied.
Table 3 Scenario for 15000 tdw oil tanker ship on navigation route P1-P2-P3-P4-P5-P6
Sh
ip s
pee
d v
[kn
ots]
Dat
e an
d t
ime
of
de-
par
ture
Th
e d
ista
nce
on
re-
stric
tion
zo
nes
[km
]
Hea
din
g a
ngle
µ [
deg
]
Res
tric
tion
s ar
ea
No
t sa
tisfie
d s
eake
ep-
ing
crit
eria
15
10
03. 02; h00
94.8 24.2 89.7 55.9 85.0
-
65 70 50 75 115
-
P1-P2 P2-P3 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ RMSφ RMSφ
- 15
10
03. 02; h03
94.8 24.2 89.7 55.9 85.0
-
65 75 55 75 115
-
P1-P2 P2-P3 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ RMSφ RMSφ
- 15
10
03. 02; h06
94.8 24.2 89.7 55.9 85.0
-
65 75 55 65 120
-
P1-P2 P2-P3 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ RMSφ RMSφ
- 15
10
03. 02; h09
94.8 24.2 89.7 55.9 85.0
-
65 75 50 60 135
-
P1-P2 P2-P3 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ RMSφ RMSφ
- 15
10
03. 02; h_ 12
94.8 24.2 89.7 55.9
-
65 75 45 50 -
P1-P2 P2-P3 P3-P4 P4-P5
-
RMSφ RMSφ RMSφ RMSφ
- 15
10
03. 02; h15
94.8 24.2 89.7 55.9
-
70 75 45 50 -
P1-P2 P2-P3 P3-P4 P4-P5
-
RMSφ RMSφ RMSφ RMSφ
-
15
10
03. 02; h18
94.8 24.2 55.9
-
70 75 50 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
03. 02; h21
94.8 24.2 55.9
-
70 75 50 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
04. 02; h00
94.8 24.2 55.9
-
65 75 50 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
04. 02; h03
94.8 24.2 55.9
-
65 75 45 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
04. 02; h06
94,8 24,2 55,9
-
65 70 45 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
04. 02; h09
94.8 24.2 55.9
-
55 65 45 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
04. 02; h_ 12
94.8 24.2 55.9
-
55 60 45 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
04.702; h15
94.8 24.2 55.9
-
55 60 45 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
04. 02; h18
94.8 24.2 55.9 85.0
-
55 65 50 140
-
P1-P2 P2-P3 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ -
15
10
04. 02; h21
94.8 24.2 55.9 85.0
-
65 75 55 135
-
P1-P2 P2-P3 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ -
15
10
05. 02; h00
94.8 24.2 89.7 55.9 85.0
-
70 75 45 60 135
-
P1-P2 P2-P3 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ
RMSφ
- 15
10
05. 02; h03
94.8 89.7 55.9 85.0
-
70 45 60 135
-
P1-P2 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ -

Fascicle XI The Annals of “Dunarea de Jos” University of Galati
© Galati University Press, 2013
15
10
05. 02; h06
94.8 89.7 55.9 85.0
-
70 45 60 135
-
P1-P2 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ -
15
10
05. 02; h09
94.8 24.2 89.7 55.9 85.0
-
70 75 45 60 135
-
P1-P2 P2-P3 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ
RMSφ
- 15
10
05. 02; h12
94.8 89.7 55.9 85.0
-
70 45 55 140
-
P1-P2 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ -
15
10
05. 02; h_ 15
94.8 89.7 55.9 85.0
-
70 45 50 145
-
P1-P2 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ -
15
10
05. 02; h18
94.8 24.2 55.9 85.0
-
70 75 50 145
-
P1-P2 P2-P3 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ
- 15
10
05. 02; h21
94.8 24.2 55.9
-
65 75 45 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
06. 02; h00
94.8 24.2 55.9
-
60 70 50 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
06. 02; h_ 03
94.8 24.2 55.9
-
60 65 50 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
06. 02; h06
94.8 24.2 55.9
-
60 65 50 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
06. 02; h09
94.8 24.2 55.9
-
60 70 45 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
06. 02; h12
94.8 24.2 55.9
-
60 70 45 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
- 15
10
06. 02; h15
94.8 24.2 55.9
-
60 70 45 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
-
15
10
06. 02; h18
94,8 24,2 55,9
-
60 65 45 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
-
15
10
06. 02; h21
94,8 24,2 55,9
-
55 65 50 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
-
15
10
07. 02; h00
94,8 24,2 55,9
-
55 60 45 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
-
15
10
07. 02; h03
94,8 24,2 55,9
-
55 65 50 -
P1-P2 P2-P3 P4-P5
-
RMSφ RMSφ RMSφ
-
15
10
07. 02; h06
94,8 24,2 55,9 85,0
-
60 65 50 145
-
P1-P2 P2-P3 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ
-
15
10
07. 02; h09
94,8 24,2 55,9 85,0
-
65 70 55 140
-
P1-P2 P2-P3 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ
-
15
10
07. 02; h12
94,8 24,2 89,7 55,9 85,0
-
70 75 45 55 140
-
P1-P2 P2-P3 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ RMSφ RMSφ
-
15
10
07. 02; h15
94,8 89,7 55,9 85,0
-
70 45 55 140
-
P1-P2 P3-P4 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ -
15
10
07. 02; h18
94,8 55,9 85,0
-
70 55 145
-
P1-P2 P4-P5 P5-P6
-
RMSφ RMSφ
RMSφ -
15
10
07. 02; h21
94,8 24,2 55,9 85,0
-
65 75 50 145
-
P1-P2 P2-P3 P4-P5 P5-P6
-
RMSφ RMSφ RMSφ
RMSφ -

The Annals of “Dunarea de Jos” University of Galati Fascicle XI
© Galati University Press, 2013
The first scenario, including the route with six points in the western part of the Black Sea, P1-P2-P3-P4-P5-P6, pointed out that for the service speed of 10 knots of the tanker ship, satisfies all the safety seakeeping criteria all the way of the route, so the navi-gation can take place without restrictions.
At the increasing of the ship speed to 15 knots, the seakeeping criteria are not satisfied on three, four and five sections of the route (Table 3), which makes for a longer period of time that the route can not be travelled by this oil tanker ship. It is the case of the first part of the 03.02.2005 day, when the seakeeping cri-teria are not satisfied on the entire route (five sections), the end of the 04.02.2005 day and almost entirely 05.02 and 07.02 days, when there are navigation restrictions on four sec-tions, except the sections P2-P3 and P3-P4. In the rest of the studied period time there are navigation restrictions on three sections, there are no such restrictions on the P3-P4 and P5-P6 sections, allowing the route to be either partially travelled on P1-P6 path, either P1-P5-P6 path. The fact that the most of the stud-ied time the safety seakeeping criteria are not satisfied on P1-P2 and P2-P3 sections, confirm that the storm reached the greatest intensity in the north-western part of the Black Sea area. The navigation restrictions are imposed in all cases by the oscillation amplitude roll (RMSφ) for values of the heading angle of 450-750 for the first four sections and of the 1150-1450 for the last section of the route (P5- P6) .
Table 4 Scenario for 15000 tdw oil tanker ship on navigation route P1-P3-P6-P7-P8
Sh
ip s
pee
d v
[kn
ots]
Dat
e an
d t
ime
of
de-
par
ture
Th
e d
ista
nce
on
re-
stric
tion
zo
nes
[km
]
Hea
din
g a
ngle
µ [
deg
]
Res
tric
tion
s ar
ea
No
t sa
tisfie
d s
eake
ep-
ing
crit
eria
15
10
03. 02; h00
117.5 219.7
-
65 55 -
P1-P3 P3-P6
-
RMSφ RMSφ
-
15
10
03. 02; h03
117.5 219.7
-
65 55 -
P1-P3 P3-P6
-
RMSφ RMSφ
- 15
10
03. 02; h06
117.5 219.7
-
65 50 -
P1-P3 P3-P6
-
RMSφ RMSφ
- 15
10
03. 02; h09
117.5 219.7
-
65 35 -
P1-P3 P3-P6
-
RMSφ RMSφ
- 15 10
03. 02; h12
117.5 -
65 -
P1-P3 -
RMSφ -
15 10
03. 02; h15
117.5 -
70 -
P1-P3 -
RMSφ -
15 10
03. 02; h18
117.5 -
70 -
P1-P3 -
RMSφ -
15
10
03. 02; h21
117.5 219.7
-
65 55 -
P1-P3 P3-P6
-
RMSφ RMSφ
- 15 10
04. 02; h00
117.5 -
65 -
P1-P3 -
RMSφ -
15 10
04. 02; h03
117.5 -
65 -
P1-P3 -
RMSφ -
15 10
04. 02; h06
117.5 -
65 -
P1-P3 -
RMSφ -
15 10
04. 02; h09
117.5 -
55 -
P1-P3 -
RMSφ -
15 10
04. 02; h12
117.5 -
55 -
P1-P3 -
RMSφ -
15 10
04. 02; h15
117.5 -
50 -
P1-P3 -
RMSφ -
15 10
04. 02; h18
117.5 -
60 -
P1-P3 -
RMSφ -
15 10
04. 02; h21
117.5 -
65 -
P1-P3 -
RMSφ -
15 10
05. 02; h00
117.5 -
70 -
P1-P3 -
RMSφ -
15 10
05. 02; h03
117.5 -
70 -
P1-P3 -
RMSφ -
15 10
05. 02; h06
117.5 -
70 -
P1-P3 -
RMSφ -

Fascicle XI The Annals of “Dunarea de Jos” University of Galati
© Galati University Press, 2013
15 10
05. 02; h09
117.5 -
70 -
P1-P3 -
RMSφ -
15 10
05. 02; h12
117.5 -
70 -
P1-P3 -
RMSφ -
15 10
05. 02; h15
117.5 -
70 -
P1-P3 -
RMSφ -
15 10
05. 02; h18
117.5 -
70 -
P1-P3 -
RMSφ -
15 10
05. 02; h21
117.5 -
65 -
P1-P3 -
RMSφ -
15 10
06. 02; h00
117.5 -
60 -
P1-P3 -
RMSφ -
15 10
06. 02; h03
117.5 -
60 -
P1-P3 -
RMSφ -
15 10
06. 02; h06
117.5 -
60 -
P1-P3 -
RMSφ -
15 10
06. 02; h09
117.5 -
60 -
P1-P3 -
RMSφ -
15 10
06. 02; h12
117.5 -
60 -
P1-P3 -
RMSφ -
15 10
06. 02; h15
117.5 -
65 -
P1-P3 -
RMSφ -
15 10
06. 02; h18
117.5 -
60 -
P1-P3 -
RMSφ -
15 10
06. 02; h21
117.5 -
55 -
P1-P3 -
RMSφ -
15 10
07. 02; h00
117.5 -
55 -
P1-P3 -
RMSφ -
15 10
07. 02; h03
117.5 -
55 -
P1-P3 -
RMSφ -
15 10
07. 02; h06
117.5 -
60 -
P1-P3 -
RMSφ -
15 10
07. 02; h09
117.5 -
65 -
P1-P3 -
RMSφ -
15 10
07. 02; h12
117.5 -
70 -
P1-P3 -
RMSφ -
15 10
07. 02; h15
117.5 -
75 -
P1-P3 -
RMSφ -
15 10
07. 02; h18
117.5 -
70 -
P1-P3 -
RMSφ -
15 10
07. 02; h21
117.5 -
65 -
P1-P3 -
RMSφ -
The second scenario, with the route P1-
P3-P6-P7-P8, located partly in the western part of the Black Sea area and partly in its centre, for the service speed of 10 knots of the oil tanker ship, are satisfied all the safety seakeeping criteria and so there are no navi-gation restrictions.
At the increasing of the ship speed to 15 knots (Table 4) navigation restrictions appear in the first half of the time-frame studied from the first day on two sections of the route, P1-P3 and P3-P6, and the rest of the time on one section P1-P3, respectively on the route part located in the western of the Black Sea area. For these reasons, to navigate safely, first have to be bypassed the P3 and P6 points, in this case the route can be reconsidered on P1-P7-P8 path, and then have to be bypassed only P3 point, in this case the route can be reconsid-ered on P1-P6-P7-P8 path. In all cases, the navigation restrictions are imposed by the oscillation amplitude roll (RMSφ) for values of the heading angle of 600-750.
Table 5 Scenario for 15000 tdw oil tanker
ship on navigation route P1-P4-P6-P8
Sh
ip s
pee
d v
[kn
ots]
Dat
e an
d t
ime
of
dep
artu
re
Th
e d
ista
nce
on
re-
stric
tion
zo
nes
[km
]
Hea
din
g a
ngle
µ [
deg
]
Res
tric
tion
s ar
ea
No
t sa
tisfie
d s
eake
ep-
ing
crit
eria
15
10
03. 02; h00
206.2 190.6
-
60 50 -
P1-P4 P4-P6
RMSφ
RMSφ
- 15
10
03. 02; h03
206.2 190.6
-
65 50 -
P1-P4 P4-P6
-
RMSφ
RMSφ
-
The Annals of “Dunarea de Jos” University of Galati Fascicle XI
© Galati University Press, 2013
15
10
03. 02; h06
206.2 190.6 669
-
65 45 45 -
P1-P4 P4-P6 P6-P8
-
RMSφ
RMSφ RMSφ
- 15
10
03. 02; h09
206.2 669
-
60 50 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
03. 02; h12
206.2 669
-
55 55
-
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
03. 02; h15
206.2 669
-
50 60 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
03. 02; h18
206.2 669
-
50 65 -
P1-P4 P6-P8
-
RMSφ
RMSφ -
15
10
03. 02; h21
206.2 669
-
45 70
P1-P4 P6-P8
RMSφ
RMSφ
15
10
04.02;h_00
206.2 669
-
45 70 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
04. 02; h03
206.2 669
-
45 65 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15 10
04. 02; h06
669 -
60 -
P6-P8 -
RMSφ
-
15 10
04. 02; h09
669 -
60 -
P6-P8 -
RMSφ
-
15 10
04. 02; h12
669 -
60 -
P6-P8 -
RMSφ
-
15 10
04. 02; h15
669 -
65 -
P6-P8 -
RMSφ
-
15
10
04. 02; h18
206.2 669
-
45 70 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
04. 02; h21
206.2 669
-
50 70 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
05. 02; h00
206.2 669
-
55 70 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
05. 02; h03
206.2 669
-
55 65 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
05. 02; h06
206.2 669
-
55 65 -
P1-P4 P6-P8
-
RMSφ
RMSφ
15 05. 206.2 55 P1-P4 RMSφ
10
02; h09
669 -
60 -
P6-P8 -
RMSφ
15
10
05. 02; h12
206.2 669
-
55 55 -
P1-P4 P6-P8
-
RMSφ
RMSφ
15
10
05. 02; h15
206.2 669
-
55 60 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
05. 02; h18
206.2 669
-
50 65 -
P1-P4 P6-P8
-
RMSφ
RMSφ
-
15
10
05. 02; h21
206.2 669
-
45 65 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
06. 02; h00
206.2 669
-
45 60 -
P1-P4 P6-P8
-
RMSφ
RMSφ
-
15
10
06. 02; h03
206.2 669
-
45 55 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15 10
06. 02; h06
669 -
50 -
P6-P8 -
RMSφ
-
15 10
06. 02; h09
669 -
55 -
P6-P8 -
RMSφ
-
15
10
06. 02; h12
206.2 669
-
45 60 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15 10
06. 02; h15
669 -
65 -
P6-P8 -
RMSφ
-
15 10
06. 02; h18
669 -
65 -
P6-P8 -
RMSφ
-
15 10
06. 02; h21
669 -
70 -
P6-P8 -
RMSφ -
15 10
07. 02; h00
669 -
70 -
P6-P8 -
RMSφ -
15 10
07. 02; h03
669 -
70 -
P6-P8 -
RMSφ
-
15
10
07. 02; h06
206.2 669
-
45 65 -
P1-P4 P6-P8
-
RMSφ
RMSφ
-
15
10
07. 02; h09
206.2 669
-
50 65 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
07. 02; h12
206.2 669
-
55 70 -
P1-P4 P6-P8
-
RMSφ
RMSφ
-
Fascicle XI The Annals of “Dunarea de Jos” University of Galati
© Galati University Press, 2013
15
10
07. 02; h15
206.2 669
-
55 70 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
07. 02; h18
206.2 669
-
50 70 -
P1-P4 P6-P8
-
RMSφ
RMSφ
- 15
10
07. 02; h21
206.2 669
-
45 70 -
P1-P4 P6-P8
-
RMSφ
RMSφ
-
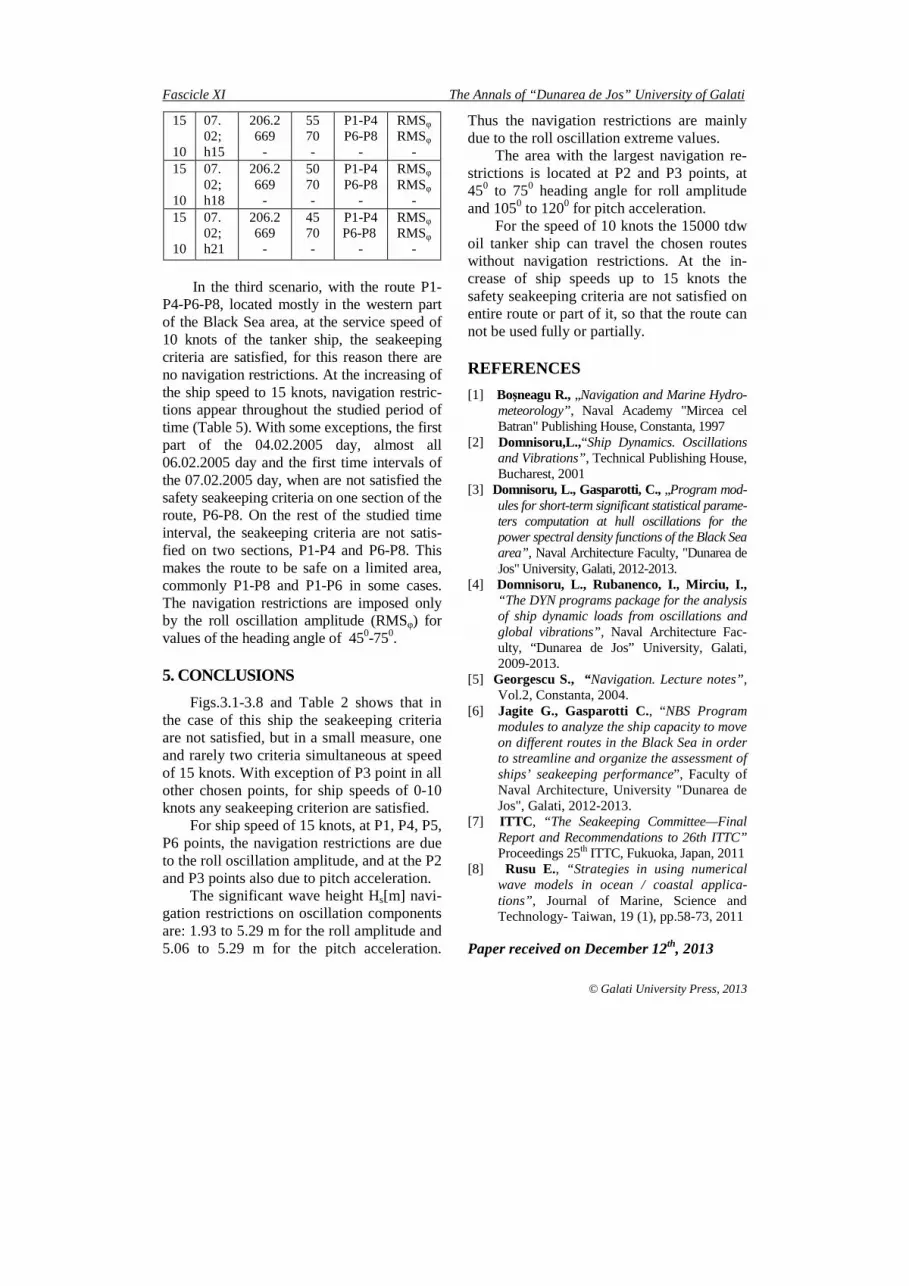
In the third scenario, with the route P1-
P4-P6-P8, located mostly in the western part of the Black Sea area, at the service speed of 10 knots of the tanker ship, the seakeeping criteria are satisfied, for this reason there are no navigation restrictions. At the increasing of the ship speed to 15 knots, navigation restric-tions appear throughout the studied period of time (Table 5). With some exceptions, the first part of the 04.02.2005 day, almost all 06.02.2005 day and the first time intervals of the 07.02.2005 day, when are not satisfied the safety seakeeping criteria on one section of the route, P6-P8. On the rest of the studied time interval, the seakeeping criteria are not satis-fied on two sections, P1-P4 and P6-P8. This makes the route to be safe on a limited area, commonly P1-P8 and P1-P6 in some cases. The navigation restrictions are imposed only by the roll oscillation amplitude (RMSφ) for values of the heading angle of 450-750.
5. CONCLUSIONS
Figs.3.1-3.8 and Table 2 shows that in the case of this ship the seakeeping criteria are not satisfied, but in a small measure, one and rarely two criteria simultaneous at speed of 15 knots. With exception of P3 point in all other chosen points, for ship speeds of 0-10 knots any seakeeping criterion are satisfied.
For ship speed of 15 knots, at P1, P4, P5, P6 points, the navigation restrictions are due to the roll oscillation amplitude, and at the P2 and P3 points also due to pitch acceleration.
The significant wave height Hs[m] navi-gation restrictions on oscillation components are: 1.93 to 5.29 m for the roll amplitude and 5.06 to 5.29 m for the pitch acceleration.
Thus the navigation restrictions are mainly due to the roll oscillation extreme values.
The area with the largest navigation re-strictions is located at P2 and P3 points, at 450 to 750 heading angle for roll amplitude and 1050 to 1200 for pitch acceleration.
For the speed of 10 knots the 15000 tdw oil tanker ship can travel the chosen routes without navigation restrictions. At the in-crease of ship speeds up to 15 knots the safety seakeeping criteria are not satisfied on entire route or part of it, so that the route can not be used fully or partially.
REFERENCES
[1] Boşneagu R., „Navigation and Marine Hydro-meteorology”, Naval Academy "Mircea cel Batran" Publishing House, Constanta, 1997
[2] Domnisoru,L.,“Ship Dynamics. Oscillations and Vibrations”, Technical Publishing House, Bucharest, 2001
[3] Domnisoru, L., Gasparotti, C., „Program mod-ules for short-term significant statistical parame-ters computation at hull oscillations for the power spectral density functions of the Black Sea area”, Naval Architecture Faculty, "Dunarea de Jos" University, Galati, 2012-2013.
[4] Domnisoru, L., Rubanenco, I., Mirciu, I., “The DYN programs package for the analysis of ship dynamic loads from oscillations and global vibrations”, Naval Architecture Fac-ulty, “Dunarea de Jos” University, Galati, 2009-2013.
[5] Georgescu S., “ Navigation. Lecture notes”, Vol.2, Constanta, 2004.
[6] Jagite G., Gasparotti C., “NBS Program modules to analyze the ship capacity to move on different routes in the Black Sea in order to streamline and organize the assessment of ships’ seakeeping performance”, Faculty of Naval Architecture, University "Dunarea de Jos", Galati, 2012-2013.
[7] ITTC , “The Seakeeping Committee—Final Report and Recommendations to 26th ITTC” Proceedings 25th ITTC, Fukuoka, Japan, 2011
[8] Rusu E., “Strategies in using numerical wave models in ocean / coastal applica-tions”, Journal of Marine, Science and Technology- Taiwan, 19 (1), pp.58-73, 2011
Paper received on December 12th, 2013