inta dumitru - complemente de fizica
TRANSCRIPT
Complemente ____de fizică
PREFAŢĂ
Progresele înregistrate de fizică în ultimele decenii au făcut ca în prezent aceasta ştiinţă să fieimplicată în cele mai diverse domenii ale cunoaşterii şi practicii umane. '
Pentru omul modern, cunoaşterea fizicii a ajuns să constituie o condiţieeducaţională de vitală însemnătate a capacităţii sale de a se înscrie în mod
armonios şi creator într-o natură şi o societate marcate din ce în ce mai profundde virtuţile şi riscurile tehnicii. Ea este o cerinţă elementară, atît pentru cei
car or a le revin funcţii de control, cit şi pentru cei ce trăiesc şi muncesc, pur şisimplu, într-un univers a cărui umanizare accelerată dezvăluie mereu noi
rezerve pentru o viaţă mai bună, trezind, totodată, şi unele reacţii adverse îndomeniul resurselor de materii prime şi energie şi al calităţii mediului înconjurător.
în acest context, devine evidentă necesitatea de a pune la îndemîna celui mai larg public cărţi în carecunoştinţele de fizică să fie prezentate în mod sistematic, riguros şi, totodată, accesibil. Acestor cerinţeautorii cărţii de fată in care recunosc cu plăcere pe foştii mei studenţi I. Inţa şi S. Dumitru, s-au străduit să Urăspundă printr-o contribuţie de calitate. Cartea este concepută astfel incit să poată cuprinde pe un spaţiurelativ restrîns capitolele de bază ale fizicii într-o formă lesne de asimilat. Volumul de faţă cuprindemecanica clasica, teoria relativităţii, termodinamica, fizica statistică, electr omaqne- tismul si optica.
Autorii au optat pentru o organizare deductivă a sistemului de cunoştinte, construind expunerea dela principii spre consecinţe şi de la general spre particular. Prin aceasta ei nu au neglijat deloc laturaexperimentală a fizicii, concentrînclu-se însă pe reliefarea semnificaţiilor experimentelor şi nu peinfrastructura lor tehnică detaliată. Mai mult, s-a încercat o selecţie cit mai restrînsă a experimentelorrevelatoare pentru ştiinţa fizicii.
Acest mod de a releva baza experimentală a fizicii în contextul unei expuneri deductive asigură cărţiiun profil echilibrat, corespunzător preferinţelor didactice actuale. Aparatul matematic folosit implicăcunoştinţe de analiză matematică, algebră şi analiză vectorială care sînt astăzi, de regulă, la îndemîna uneilargi clase de cititori. Văzută în ansamblu, cartea se conturează ca un cadru de informaţie ştiinţifică strictnecesară, pe care pot fi racordate, după dorinţă, dezvoltări în direcţia diverselor aplicaţii ale fizicii sauadînciri în direcţia fundamentelor acesteia.
Cu aceste calităţi, cartea este deschisă lecturii unui public larg. Ea se va dovedi utilă celor care, avîndca preocupare diversele aplicaţii practice ale fizicii, doresc să-şi însuşească, cu un efort moderat, unansamblu sistematizat şi coerent de cunoştinţe fundamentale de fizică. Ea poate constitui un compendiuoperativ şi o sursă de sugestii şi pentru cadrele didactice care predam fizica în învăţămîntul tehnic superior

sau în licee. Studenţii facultăţilor tehnice, de chimie şi fizică vor avea, la rîndul lor, la îndemînă, o lucrarecomplementară manualelor şi cursurilor universitare, alcătuită de doi buni cunoscători ai necesităţilor şiprofilului de muncă al studentului, a căror temeinică experienţă este pe măsura pasiunii şi devotamentuluicu care s-au dedicat învăţămîntului şi cercetării de fizică.
Acad. prol. ION URSUCUPRINS
Capitolul I. ELEMENTE DE MECANICĂ A SISTEMELOR CU UN NUMĂR FINITDE GRADE DE LIBERTATE 7
1.1. Spaţiu, timp, sisteme de referinţă........................................ 71.2. Elemente de mecanică newtoniană aparticulelor şi sistemelor de particule. '. 111.3. Legături şi coordonate generalizate................................. 281.4. Ecuaţiile Lagrange....................................... ............ 311.5. Ecuaţiile Hamilton şi parantezele Poisson................................. 381.0. Principiul minimei acţiuni.................................... ..... 431.7. Oscilaţii liniare........................................ ............ 491.8. Mişcarea particulelor în eîmpuri de forţe centrale........................ _ 621.9. Elemente de mecanica corpurilor de masă variabilă................... 69
Capitolul II. ELEMENTE DE MECANICA MEDIILOR CONTINUE................ 732.1. Introducere....................................... 732.2. Ecuaţia de continuitate.................................. • • • ^2.3. Forţele care acţionează în mediile continue............................' . 762.4. Ecuaţiile de mişcare ale mediilor continue..........................! ! ! ! 792.5. Propagarea mişcărilor mecanice în fluide ideale; unde acustice ! . . ! ." ' 852.6. Caracteristici ale undelor acustice............................ . 91
Capitolul III. ELEMENTE DE TEORIA RELATIVITĂŢII............................... 983.1. Introducere.............................................. * gg3.2. Transformarea coordonatelor, vitezelor şi acceleraţiilor în relativitatea clasică. . .
1003.3. Forma ecuaţiilor mecanicii clasice în raport cu diferite sisteme de referinţă .... 1043.4. Postulatele teoriei relativităţii restrînse şi transformările Lorentz..... 1073.5. Consecinţele cinematice ale transformărilor Lorentz....................... 1123.6. Elemente de dinamică relativistă.......................................... ng3.7. Formularea cvadridimensională a teoriei relativităţii restrinse........... 122
Capitolul IV. ELEMENTE DE TERMODINAMICĂ........................................ 1274.1. Mişcarea termică şi sisteme termodinamice ................................ 1274 .2.Conceptele şi principiile termodinamicii stărilor şi proceselor de echilibru .... 1304.3. Ecuaţii de stare, funcţii termodinamice şi coeficienţi termodinamici...... 138
Termodinamica sistemelor cu cantitate variabilă de substanţă14

i
4.4. Termodinamica corpurilor elastice ..........4.5. Elemente de termodinamica proceselor ireversibile4.6............................................................................Capitolul V. ELEMENTE DEFIZICĂ STATISTICĂ.............................................................. 158
5.1. Descrierea statistică a...........................................sistemelortermodinamice 158
5.2. Distribuţia canonică...................................................... _5.3. Descrierea statistică.....................................................agazului ideal
' „5.4. Teoria Dulong-Petit a căldurilorspecifice.........................asolidelor ideale
1'»5.5. Elemente de teoria fluctuaţiilor ..................................... lsu
Capitolul VI. ELEMENTE DE ELECTROMAGNETISM.....................................• 1871 87
€.1.Sarcini electrice şi cîmp electromagnetic................................. °6.2. Ecuaţiile Maxwell-Lorentz ................................. ..............6.3. Energia, impulsul şi momentul cinetic alcîmpului electromagnetic.......... -ui6.4. Potenţialele cîmpului electromagnetic ....................................6 5. Unele aspecte relativiste ale electromagnetismului........................
.............. x ticai.............................................. 256
6.6. Cîmpul electromagnetic in regim static (electrostatica) • • ..............6.7. Regimul staţionar al cîmpului electromagnetic (electrocinetica) ..........
6.8. Regimulstaţionar alcîmpuluielectromagnetic(magnetostatica)
................ 303electromagnetice............6.11. Plasma şi fenomene electromagnetice în plasmăCapitolul VII. ELEMENTE DE OPTICĂ.............................................. 342
3427.1. Introducere.......................................... I'7.2. Caracteristici energetice ale radiaţiilor luminoase. Fotometrie şi măsurători foto- ^
metrice .................................................................. 3547.3. Interferenţa luminii......................................................7.4. Difracţia luminii......................................................... 3g47.5. Dispersia luminii.........................................................7.6......................................................... Absorbţia şi difuzia luminii. . ..............................................................................gg7.7. Polarizarea luminii....................................................... ^Q27.8. Elemente de opticăgeometrică ............................................. ^
146151
6.9. Cîmpul electromagnetic în regim cvasistaţionar6.10........................................................................... Cîmpul electromagnetic în regim variabil. Unde electromagnetice......................
1
Bibliografie Capitolul I
Elemente de mecanică a sistemelor cu unnumăr finit de grade de libertate
§ 3.1. SPAŢIU, TIMP, SISTEME DE REFERINŢĂ
Toate fenomenele fizice se desfăşoară în spaţiu şi timp. în accepţiuneagenerală, filozofică, spaţiul şi timpul sînt forme fundamentale ale existenţeilumii materiale. într-o astfel de viziune spaţiul caracterizează întinderea,poziţia reciprocă, iar timpul se referă la durata, coexistenţa] şi succesiuneaobiectelor şi fenomenelor realităţii obiective. Privite prin prisma particularăa fizicii, spaţiul şi timpul caracterizează obiectele şi fenomenele fizice. Deaceea, proprietăţile fizice ale spaţiului şi timpului se relevă prin intermediulstudiului proprietăţilor obiectelor şi fenomenelor fizice. Trebuie, însă,consemnat că studiul respectiv se face în diferite contexte şi aproximaţii.Astfel, obiectele şi fenomenele fizice sînt studiate într-o abordare clasică(constituită de mecanica, termodinamica, fizica statistică şi electromagnetismulîn versiune clasică (nerelativistă şi necuantică)), într-o abordare relativistă(constituită de teoria relativităţii restrînsă şi generalizată, din teoriarelativistă a fenomenelor electromagnetice) or întruna cuantică (constituită demecanica cuantică, statistica cuantică, teoria cuantică a cîmpurilor). Eezultăatunci că, în principiu, proprietăţile fizice ale spaţiului şi timpului sîntindisolubil legate de abordarea (aproximaţia şi contextul) în care sînt studiateobiectele şi fenomenele fizice prin a căror comportare şi proprietăţi spaţiul şitimpul îşi relevă caracteristicile. în acest paragraf ne vom referi doar laproprietăţile spaţiului şi timpului care se relevă prin intermediul obiectelorşi fenomenelor studiate în mecanica clasică, întrucît această ramură a fiziciiformează obiectul de discuţie al prezentului capitol şi al celui următor.
2
în mecanica clasică caracterizarea întinderii corpurilor (obiectelor) şi apoziţiilor lor reciproce se face cu ajutorul distanţelor spaţiale, iar des-crierea caracteristicilor de durată, coexistenţă şi succesiune a fenomenelor seface cu ajutorul intervalelor de timp. Distanţele spaţiale se măsoară cuajutorul etaloanelor de lungime, iar intervalele de timp se măsoară cu aju-torulceasurilor. în mecanica clasică, pe baza experienţei, se admite că respectiveleinstrumente au următoarele proprietăţi: ^
— dacă lungimea a două etaloane coincide o dată, etaloanele rămîn egale înorice comparări ulterioare, independent de starea lor de mişcare relativă (unulfaţă de altul);
— două ceasuri, odată reglate pe aceeaşi oră iniţială, vor arătaîntotdeauna aceeaşi oră, independent de starea lor de mişcare relativă. Acestedouă proprietăţi arată că în mecanica clasică distanţele spaţiale şi intervaleletemporale au un caracter absolut. ^ ̂ ’ în cadrul mecanicii clasice experienţa ne arată că pentru a defini completpoziţia unui corp punctiform în raport cu alte corpuri în cazul cel mai generaleste necesar şi suficient să folosim trei distanţe independente între ele.Această proprietate a spaţiului se numeşte tridimensionalitate. Tot experienţa nearată că timpul este unidimensional, ceea ce înseamnă că pentru a „repera în timp”un eveniment faţă de altul este necesar şi suficient să dăm un singur intervalde timp. De notat că tridimensionalitatea spaţiului şi unidimensionalitateatimpului sînt proprietăţi stabilite experimental şi că pînă în prezent nu s-adat- vreo demonstraţie teoretică care să arate de ce spaţiul are exact 3dimensiuni (şi de ce, de exemplu, nu are2, 4 sau 5 dimensiuni) şi de ce timpul este unidimensional. ^
Analiza fenomenelor studiate în mecanica clasică arată că spaţiul şi timpulmai au următoarele proprietăţi: ^
— spaţiul este omogen, adică proprietăţile lui sînt aceleaşi în toatepunctele sale (nu apar modificări ale respectivelor proprietăţi la deplasareadintr-un punct în altul); . , . „
— spaţiul este izotrop, adică proprietăţile lui sînt aceleaşi după toatedirecţiile (nu apar modificări aie respectivelor proprietăţi la rotaţia în juruldirecţiilor spaţiale);
—• timpul este omogen, adică diferitele momente de timp sînt identice întreele (nu apar deosebiri de proprietăţi ale timpului dacă ne referim la diferitemomente de timp).
Caracteristicile menţionate ale spaţiului şi timpului se numesc pro prietăţi de simetrie. De notat că aceste proprietăţi se reflectă în legi de conservare a unormărimi mecanice ale sistemelor izolate de corpuri.
Experienţele referitoare la fenomenele studiate de mecanica clasică aratăde asemenea că spaţiul este plat sau euclidian — adică relaţiile spaţiale pot fidescrise (modelate) cu ajutorai geometriei euclidiene. De menţionat aici faptulcă problema de a şti care este geometria (euclidiană sau neeuclidiană) cuajutorul căreia se descriu (modelează) relaţiile spaţiale din spaţiul fizic realeste o problemă de fizică şi nu una de matematică.
Reprezentarea spaţiului şi timpului prin proprietăţile menţionate mai susse numeşte reprezentare clasică. Ea a fost stabilită pe baza experienţei şi sedovedeşte a fi aplicabilă unui număr foarte mare de fenomene fizice.
în mecanică se foloseşte frecvent terme"”1 ^e punct material sau termenul

3
echivalent de particulă punctiformă (or, simplu, particulă). Prin punct material seînţelege un corp pentru care se pot neglija dimensiunile
4
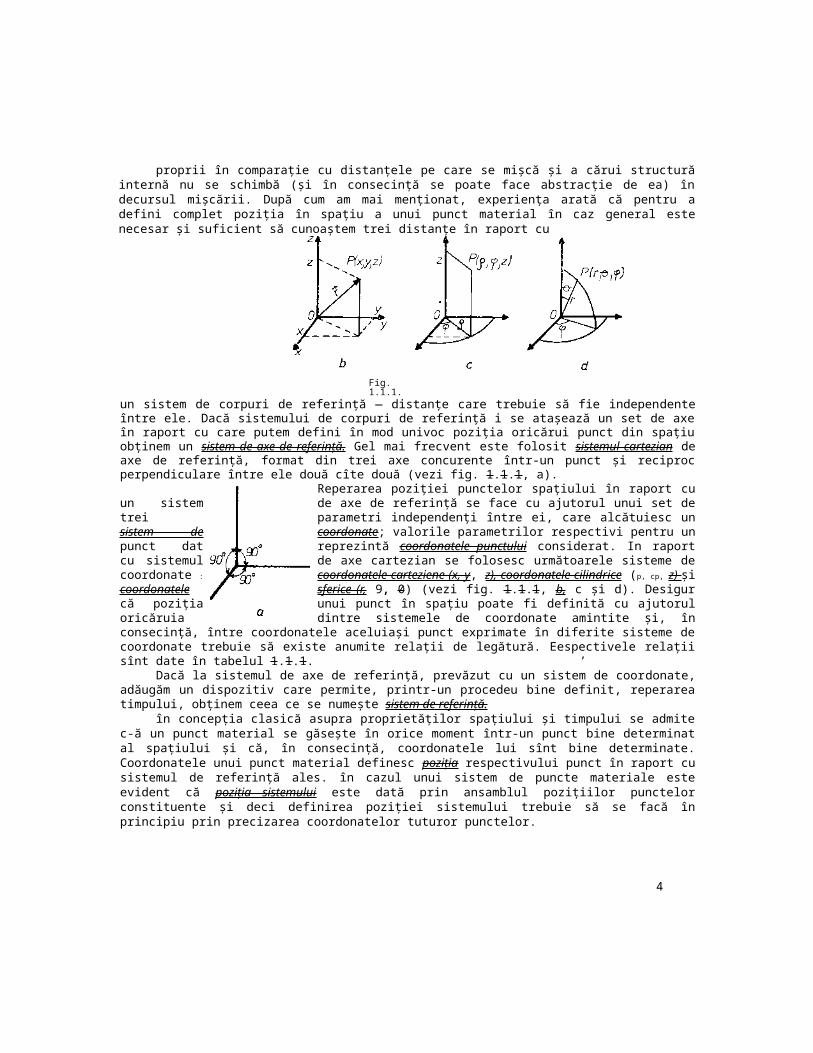
proprii în comparaţie cu distanţele pe care se mişcă şi a cărui structurăinternă nu se schimbă (şi în consecinţă se poate face abstracţie de ea) îndecursul mişcării. După cum am mai menţionat, experienţa arată că pentru adefini complet poziţia în spaţiu a unui punct material în caz general estenecesar şi suficient să cunoaştem trei distanţe în raport cu
un sistem de corpuri de referinţă — distanţe care trebuie să fie independenteîntre ele. Dacă sistemului de corpuri de referinţă i se ataşează un set de axeîn raport cu care putem defini în mod univoc poziţia oricărui punct din spaţiuobţinem un sistem de axe de referinţă. Gel mai frecvent este folosit sistemul cartezian deaxe de referinţă, format din trei axe concurente într-un punct şi reciprocperpendiculare între ele două cîte două (vezi fig. 1.1.1, a).
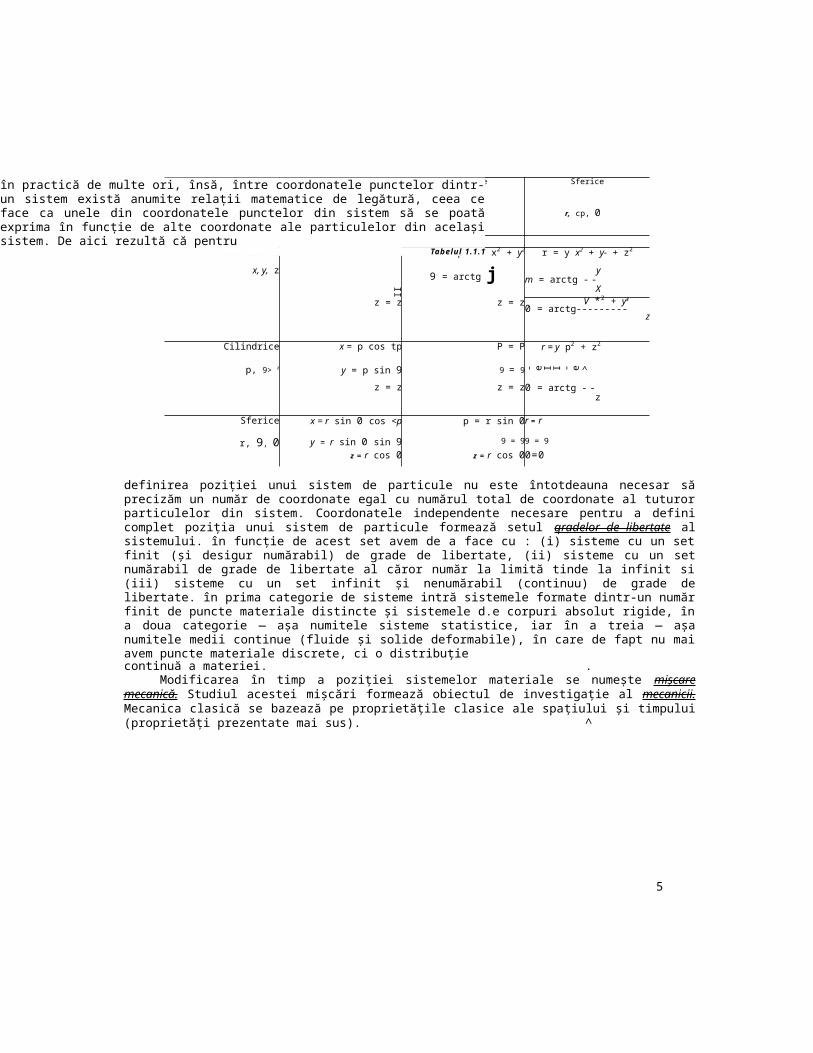
Reperarea poziţiei punctelor spaţiului în raport cuun sistem de axe de referinţă se face cu ajutorul unui set detrei parametri independenţi între ei, care alcătuiesc unsistem de coordonate; valorile parametrilor respectivi pentru unpunct dat reprezintă coordonatele punctului considerat. In raportcu sistemul de axe cartezian se folosesc următoarele sisteme decoordonate : coordonatele carteziene (x, y, z), coordonatele cilindrice (p, cp, z) şicoordonatele sferice (r, 9, 0) (vezi fig. 1.1.1, b, c şi d). Desigurcă poziţia unui punct în spaţiu poate fi definită cu ajutoruloricăruia dintre sistemele de coordonate amintite şi, înconsecinţă, între coordonatele aceluiaşi punct exprimate în diferite sisteme decoordonate trebuie să existe anumite relaţii de legătură. Eespectivele relaţiisînt date în tabelul 1.1.1. ’
Dacă la sistemul de axe de referinţă, prevăzut cu un sistem de coordonate,adăugăm un dispozitiv care permite, printr-un procedeu bine definit, reperareatimpului, obţinem ceea ce se numeşte sistem de referinţă.
în concepţia clasică asupra proprietăţilor spaţiului şi timpului se admitec-ă un punct material se găseşte în orice moment într-un punct bine determinatal spaţiului şi că, în consecinţă, coordonatele lui sînt bine determinate.Coordonatele unui punct material definesc poziţia respectivului punct în raport cusistemul de referinţă ales. în cazul unui sistem de puncte materiale esteevident că poziţia sistemului este dată prin ansamblul poziţiilor punctelorconstituente şi deci definirea poziţiei sistemului trebuie să se facă înprincipiu prin precizarea coordonatelor tuturor punctelor.
Fig. 1.1.1.
5
ICarteziene
Cilindrice Sferice
în funcţie decoordonatele
x, y, z P- * r, cp, 0
Carteziene X = X p = V x2 + y2 r = y x2 + y- + z2
x, y, z
II
9 = arctg j ym = arctg - -
Xz = z z = z V *2 + y3
0 = arctg---------z
Cilindrice x = p cos tp P = P r = y p2 + z2
p, 9> z y = p sin 9 9 = 9 - e I I - e >
z = z z = z0 = arctg - -z
Sferice x = r sin 0 cos <p p = r sin 0r = r
r, 9, 0 y = r sin 0 sin 9 9 = 99 = 9z = r cos 0 z = r cos 00=0
definirea poziţiei unui sistem de particule nu este întotdeauna necesar săprecizăm un număr de coordonate egal cu numărul total de coordonate al tuturorparticulelor din sistem. Coordonatele independente necesare pentru a definicomplet poziţia unui sistem de particule formează setul qradelor de libertate alsistemului. în funcţie de acest set avem de a face cu : (i) sisteme cu un setfinit (şi desigur numărabil) de grade de libertate, (ii) sisteme cu un setnumărabil de grade de libertate al căror număr la limită tinde la infinit si(iii) sisteme cu un set infinit şi nenumărabil (continuu) de grade delibertate. în prima categorie de sisteme intră sistemele formate dintr-un numărfinit de puncte materiale distincte şi sistemele d.e corpuri absolut rigide, îna doua categorie — aşa numitele sisteme statistice, iar în a treia — aşanumitele medii continue (fluide şi solide deformabile), în care de fapt nu maiavem puncte materiale discrete, ci o distribuţiecontinuă a materiei. .
Modificarea în timp a poziţiei sistemelor materiale se numeşte miş care mecanică. Studiul acestei mişcări formează obiectul de investigaţie al mecanicii.Mecanica clasică se bazează pe proprietăţile clasice ale spaţiului şi timpului(proprietăţi prezentate mai sus). ^
în practică de multe ori, însă, între coordonatele punctelor dintr-un sistem există anumite relaţii matematice de legătură, ceea ceface ca unele din coordonatele punctelor din sistem să se poatăexprima în funcţie de alte coordonate ale particulelor din acelaşisistem. De aici rezultă că pentru
Tabelul 1.1.1
6
’ După cum am menţionat mai sus, studiul fenomenelor fizice şi, înparticular al celor mecanice, necesită alegerea unui sistem de referinţă înraport cu care să se facă descrierea fenomenelor respective. Evidentcăexistă o infinitate de sisteme de referinţă care se mişcă arbitrar unulfaţă de altul. întrueît distanţele spaţiale şi intervalele temporale sedefinesc în raport cu sistemele de referinţă şi deoarece în relaţiilematematice care exprimă legile fizicii intră distanţe spaţiale şi intervaletemporale, este de presupus că legile naturii nu au aceeaşi formă deexprimare matematică . în toate sistemele de referinţă. (Alegînd un sistemde referinţă arbitrar se poate ajunge la situaţia că legile unor fenomenefoarte simple să ia forme foarte complicate.) De notat că presupunereamenţionată a fost atestată de experienţă. Natural că atunci problema care sepune este aceea de a alege un sistem de referinţă astfel încît în raport cuel legile fizicii să capete forma cea mai simplă. TJn asemenea sistem ar ficel mai comod pentru descrierea fenomenelor fizice. Pen1.ru a găsi un sistemde referinţă cu caracteristicile menţionate ar trebui să pornim de la cazulmişcării celei mai elementare. O astfel de mişcare este mişcarea uneiparticule âtît de îndepărtată de orice alte corpuri încît să se poatăneglija interacţiunea ei cu aceste corpuri. Mişcarea particulei respectivese numeşte mişcare liberă. Experienţa ne arată că dacă două particule aflatefiecare în mişcare liberă sînt, la un moment dat, în repaus relativ(respectiv în mişcare relativă cu o viteză V) ele rămîn tot timpul în repausrelativ (respectiv în mişcare relativă rectilinie şi uniformă cu aceeaşiviteză V). De aceea este convenabil să alegem un sistem de referinţă alecărui axe de referinţă sînt legate solidar de o particulă care se află înmişcare liberă. Un astfel de sistem de referinţă se numeşte inerţial. ’
Din cele prezentate mai sus rezultă că un sistem de referinţă ce semişeă reetiliniu şi uniform faţă de un sistem de referinţă inerţial’ este şiel inerţial. Evident, că există o infinitate de sisteme de referinţăinerţiale. De notat aici că în raport cu sistemele de referinţă inerţialespaţiul este omogen (diversele puncte ale spaţiului sînt echivalente întreele) si izotrop (diversele direcţii spaţiale sînt echivalente între ele). Unsistem de’referintă care se mişcă arbitrar (nu reetiliniu şi uniform) faţăde un sistem de referinţă inerţial este neineriial. în raport cu un sistem dereferinţă neinerţial spaţiul nu mai este în general nici omogen niciizotrop. ’ ’
în volumul de faţă majoritatea fenomenelor fizice vor fi descrise înraport cu sisteme de referinţă inerţiale şi, de aceea, în general nu vom maispecifica de fiecare dată că este vorba de un astfel de sistem. Cazurile deexcepţie (cînd descrierea fenomenelor fizice se face in sisteme de referinţăneinerţiale) vor fi menţionate în mod explicit (vezi, de exemplu, cap. III).
§ 1.2. ELEMENTE DE MECANICĂ NEWTONIANĂ A PARTICULELOR SISISTEMELOR DE PARTICULE ’
în descrierea mişcărilor mecanice folosim noţiunea de punct materialsau particulă punctiformă. Un corp poate fi asimilat cu un punct material

7
dacă dimensiunile corpului sînt neglijabile în raport cu distanţele

8
pe care el se mişcă şi dacă în problemele luate în studiu se poate faceabstracţie de structura internă a corpului. Posibilitatea de a asimila uncorp cu un punct material depinde de contextul concret al problemeistudiate. Astfel, Pămîntul în mişcarea sa anuală în jurul Soarelui poate ficonsiderat
i J - 1/_* t-v-.-■y-i«nv-l -îvwn/"IVI
ca, un punct material (în această mişcare dimensiunileproprii ale Pămîntului sînt neglijabile în comparaţie cu distanţele pe care else mişcă, iar de structura lui internă se poate face abstracţie). Pe de altă
parte, Pămîntul nu mai poate fi considerat ca un punctmaterial cînd studiem mişcarea sa de rotaţie diurnă înjurul propriei axe (deoarece dimensiunile Pămîntului nu maisînt neglijabile în raport cu distanţele pe care se facemişcarea) sau cînd studiem mişcările seismice ■ (deoareceîn aceste mişcări nu mai putem face abstracţie de structurainternă a Pămîntului, tocmai respectiva structură fiind ceacare se modifică în decursul mişcării).Poziţia unei particule punctiforme în raport cu unsistem de referinţă poate fi‘precizată cu ajutorul
vectorului de poziţie (numit şi rază vec- toare) r (fig. 1.2.1).Dacă folosim coordonatele carteziene %, y şi z, atunci r poate fi
scris sub formar = xi + y\ + zk
unde i, j şi k sînt versorii celor trei axe de coordonate.Deoarece, în general, particula se mişcă, raza ei vectoare r este, îngeneral, funcţie de timpul t,adicăr = r (t) = x{t) i + y(t)\ + z(<)k. (1-2.:Curba pe care o descrie particula în mişcare este tocmai curba pecare o descrie vîrful vectorului r în cursul variaţiei sale ca funcţie de t şise numeşte traiectoria particulei. Mişcările particulelor pot fi clasificate dupăforma geometrică a traiectoriilor. Astfel, avem mişcări rectilinii (traiec-toriile fiind linii drepte) şi mişcări curbilinii (care pot fi la rîndul lorcirculare, eliptice, spirale etc., după forma geometrică a traiectoriei).Derivata în raport cu timpul a vectorului de poziţie, adică mărimea
00 i + yj + 2k = vx\ + t’„j + «JU
se numeşte viteză a particulei. Mărimile vx, vy şi vz sîntcomponentele carteziene ale vitezei. Derivata în raport cu timpul a vitezei,adică
Fig. 1.2.1.
(1.2.1)
(1.2.2)
(1.2.3)
v =----drdt
9
mărimeadv ............ ...
a = —. = v = r = xi + yi + zk = vsi + v„\ + v,k =
= axi + ayj -f azk (1.2.4)se numeşte acceleraţie a particulei, mărimile ax, ay şi az fiind componentelecartezienealeacceleraţiei. După felul acceleraţiei mişcările se
împart în:uniforme (a = 0), uniform variate (da/d* = 0) şi variate (da/dt # 0).
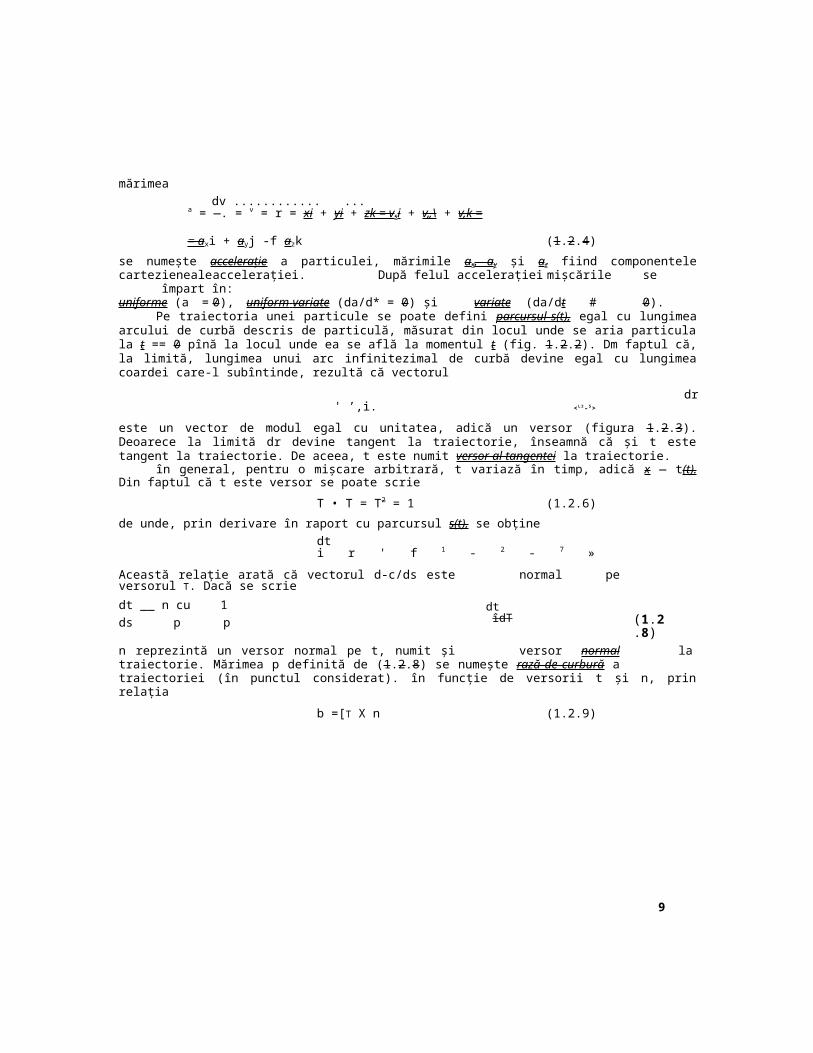
Pe traiectoria unei particule se poate defini parcursul s(t), egal cu lungimeaarcului de curbă descris de particulă, măsurat din locul unde se aria particulala t == 0 pînă la locul unde ea se află la momentul t (fig. 1.2.2). Dm faptul că,la limită, lungimea unui arc infinitezimal de curbă devine egal cu lungimeacoardei care-l subîntinde, rezultă că vectorul
dr' ’,i. <L 2-5>
este un vector de modul egal cu unitatea, adică un versor (figura 1.2.3).Deoarece la limită dr devine tangent la traiectorie, înseamnă că şi t estetangent la traiectorie. De aceea, t este numit versor al tangentei la traiectorie.
în general, pentru o mişcare arbitrară, t variază în timp, adică x — t(t).Din faptul că t este versor se poate scrie
T • T = T2 = 1 (1.2.6)de unde, prin derivare în raport cu parcursul s(t), se obţine
dti r ' f 1 - 2 - 7 »
Această relaţie arată că vectorul d-c/ds este normal peversorul T. Dacă se scriedt __ n cu 1ds p p
n reprezintă un versor normal pe t, numit şi versor normal latraiectorie. Mărimea p definită de (1.2.8) se numeşte rază de curbură atraiectoriei (în punctul considerat). în funcţie de versorii t şi n, prinrelaţia
b =[T X n (1.2.9)
dtîdT (1.2
.8)
I10
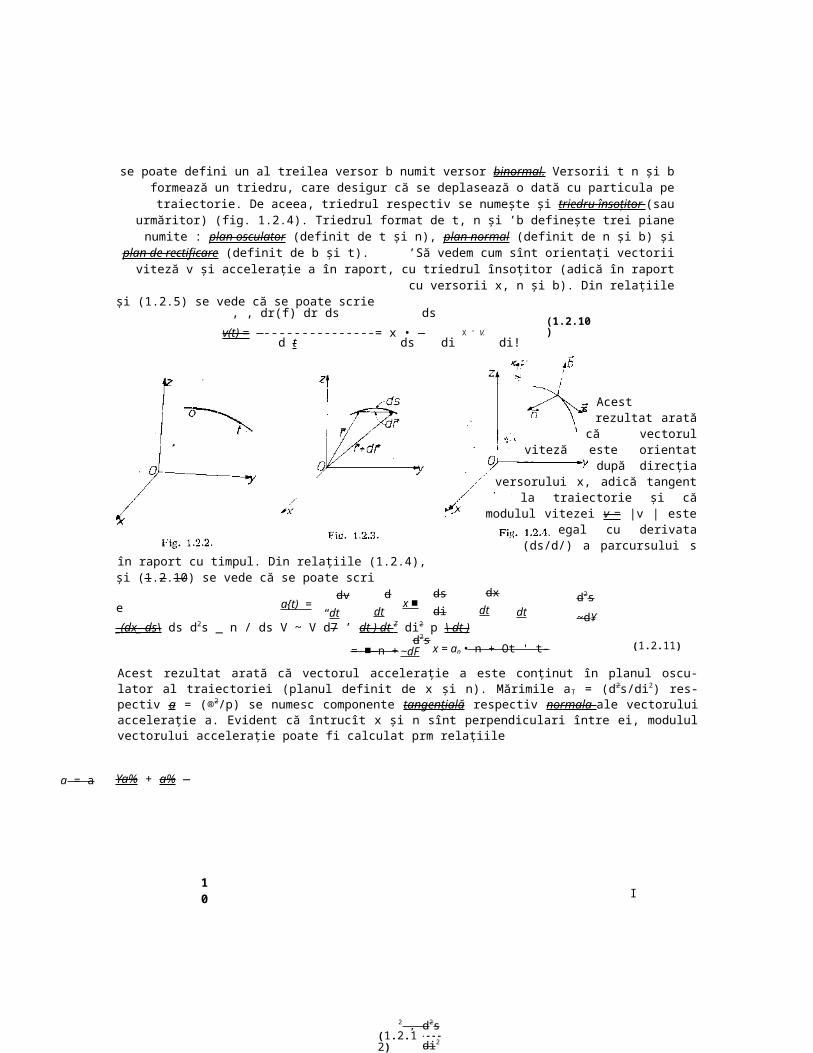
se poate defini un al treilea versor b numit versor binormal. Versorii t n şi bformează un triedru, care desigur că se deplasează o dată cu particula petraiectorie. De aceea, triedrul respectiv se numeşte şi triedru însoţitor (sau
urmăritor) (fig. 1.2.4). Triedrul format de t, n şi ’b defineşte trei pianenumite : plan osculator (definit de t şi n), plan normal (definit de n şi b) şi
plan de rectificare (definit de b şi t). ’Să vedem cum sînt orientaţi vectoriiviteză v şi acceleraţie a în raport, cu triedrul însoţitor (adică în raport
cu versorii x, n şi b). Din relaţiileşi (1.2.5) se vede că se poate scrie
, , dr(f) dr ds dsv(t) = —---------------= x • —
d t ds di di!
Acestrezultat arată
că vectorulviteză este orientat
după direcţiaversorului x, adică tangent
la traiectorie şi cămodulul vitezei v = |v | este
egal cu derivata(ds/d/) a parcursului s
în raport cu timpul. Din relaţiile (1.2.4),şi (1.2.10) se vede că se poate scri
e_(dx_ ds\ ds d2s _ n / ds V ~ V”d7 ’ dt ) dt Z di2 p \ dt )
Acest rezultat arată că vectorul acceleraţie a este conţinut în planul oscu-lator al traiectoriei (planul definit de x şi n). Mărimile aT = (d2s/di2) res-pectiv a = (®2/p) se numesc componente tangenţială respectiv normala ale vectoruluiacceleraţie a. Evident că întrucît x şi n sînt perpendiculari între ei, modululvectorului acceleraţie poate fi calculat prm relaţiile
Ya% + a% —
X ' V.
2 , d2s+ T------
di2(1.2.12)
a = a
(1.2.10)
d2s~d¥
dxdt
dsdi
ddt
dvdt
a{t) = x ■dt
d2s~dF (1.2.11)= ■—n + x = an • n + Ot ' t-
11
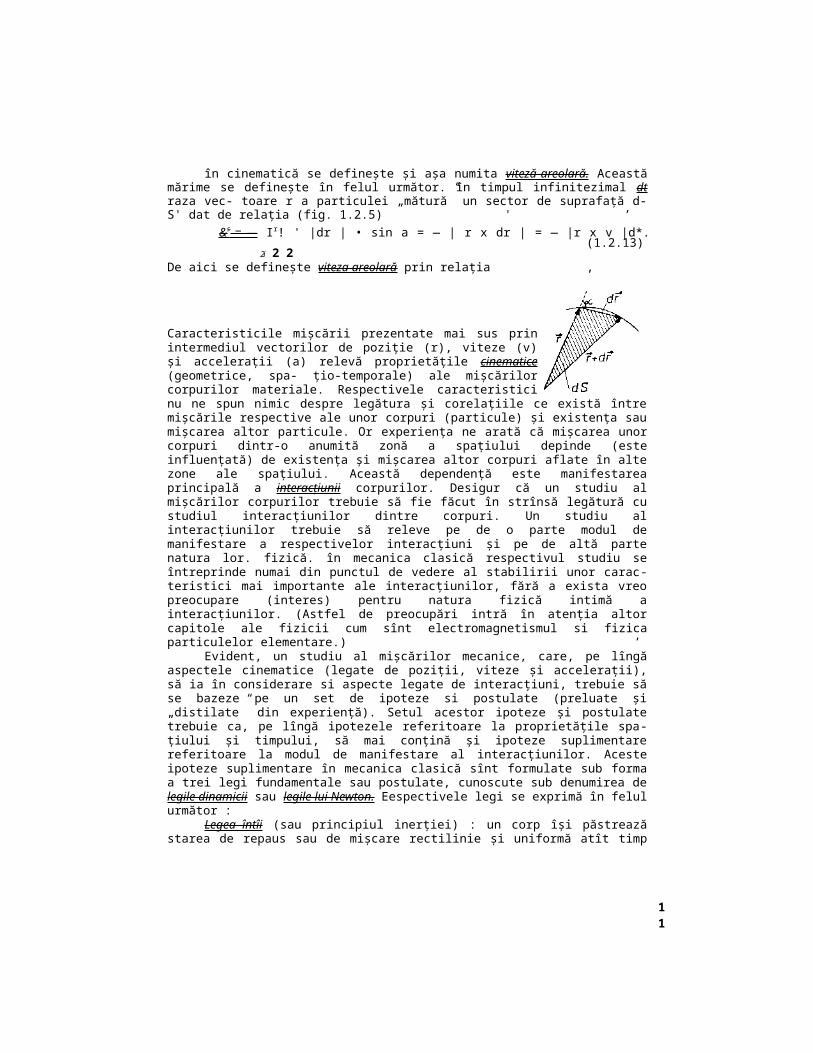
în cinematică se defineşte şi aşa numita viteză areolară. Aceastămărime se defineşte în felul următor. în timpul infinitezimal dtraza vec- toare r a particulei „mătură” un sector de suprafaţă d-S' dat de relaţia (fig. 1.2.5) ' ’
& s = — Ir! ' |dr | • sin a = — | r x dr | = — |r x v |d*.(1.2.13)
2i 2 2De aici se defineşte viteza areolară prin relaţia ,
Caracteristicile mişcării prezentate mai sus prinintermediul vectorilor de poziţie (r), viteze (v)şi acceleraţii (a) relevă proprietăţile cinematice(geometrice, spa- ţio-temporale) ale mişcărilorcorpurilor materiale. Respectivele caracteristicinu ne spun nimic despre legătura şi corelaţiile ce există întremişcările respective ale unor corpuri (particule) şi existenţa saumişcarea altor particule. Or experienţa ne arată că mişcarea unorcorpuri dintr-o anumită zonă a spaţiului depinde (esteinfluenţată) de existenţa şi mişcarea altor corpuri aflate în altezone ale spaţiului. Această dependenţă este manifestareaprincipală a interacţiunii corpurilor. Desigur că un studiu almişcărilor corpurilor trebuie să fie făcut în strînsă legătură custudiul interacţiunilor dintre corpuri. Un studiu alinteracţiunilor trebuie să releve pe de o parte modul demanifestare a respectivelor interacţiuni şi pe de altă partenatura lor. fizică. în mecanica clasică respectivul studiu seîntreprinde numai din punctul de vedere al stabilirii unor carac-teristici mai importante ale interacţiunilor, fără a exista vreopreocupare (interes) pentru natura fizică intimă ainteracţiunilor. (Astfel de preocupări intră în atenţia altorcapitole ale fizicii cum sînt electromagnetismul si fizicaparticulelor elementare.) ’
Evident, un studiu al mişcărilor mecanice, care, pe lîngăaspectele cinematice (legate de poziţii, viteze şi acceleraţii),să ia în considerare si aspecte legate de interacţiuni, trebuie săse bazeze pe un set de ipoteze si postulate (preluate şi„distilate” din experienţă). Setul acestor ipoteze şi postulatetrebuie ca, pe lîngă ipotezele referitoare la proprietăţile spa-ţiului şi timpului, să mai conţină şi ipoteze suplimentarereferitoare la modul de manifestare al interacţiunilor. Acesteipoteze suplimentare în mecanica clasică sînt formulate sub formaa trei legi fundamentale sau postulate, cunoscute sub denumirea delegile dinamicii sau legile lui Newton. Eespectivele legi se exprimă în felulurmător :
Legea întîi (sau principiul inerţiei) : un corp îşi păstreazăstarea de repaus sau de mişcare rectilinie şi uniformă atît timp
12
cît asupra lui nu se exercită vreo acţiune din exterior (dinpartea altor corpuri).
Legea a doua (sau principiul forţei) : dacă asupra unui corpacţionează o forţă F, ca expresie a interacţiunii corpuluirespectiv cu alte corpuri această forţă determină o modificare,întimp a impulsului p al corpului
13
după legeadp/di = F. (1.2.15)
Legea a treia (sau principiul acţiunii şi reacţiunii) : dacă uncorp A acţionează asupra unui alt corp £ cu o forţă F^, atunci larîndul său B acţionează asupra lui 1 cu o forţă egală şi de senscontrar cu FiM, adică cu forţa ’
FZM = - F„b. (1.2.16)Observaţie. De reţinut că sistemele de referinţă în raport cu care se formulează
cele 3 legi ale dinamicii sînt prin exclusivitate doar sistemele de referinţăinerţiale, în care — trebuie reamintit — spaţiul este omogen şi izotrop, iar timpulomogen.
Legea întîi este,după cum se poate vedea uşor, oconsecinţănemijlocită a faptului că sistemele
de referinţă inerţialesînt concepute cafiindataşate de particule aflate în mişcare liberă (adică nesupuse niciunor interacţiuni cu alte corpuri). în legea a doua impulsul peste o măsură a mişcării corpului în cauză şi este legat de vitezav a corpului respectiv prin relaţia
p == m\ (1.2.17)m fiind masa corpului. Forţa F este o măsură a interacţiuniicorpului considerat cu alte corpuri. Interacţiunea respectivădetermină (cauzează) o modificare a stării de mişcare a corpului,absenţa interacţiunii lasă corpul să execute o mişcare liberă. Dinrelaţiile (1.2.15) şi (1.2.17) se vede că masa este o măsură ainerţiei corpurilor, adică o măsură a proprietăţii lor de a-şipăstra mişcarea liberă, (deoarece cu cît masa unui corp este maimare trebuie o forţă mai mare pentru a scoate corpul respectivdintr-o stare de mişcare liberă şi a-i imprima o anumită variaţie(modificare), dp dl a impulsului (deci a măsurii mişcării). Dinaceste motive relaţia (1.2.15) nu numai că exprimă legea a doua adinamicii, dar ea poate fi privită şi ca reprezentînd relaţia dedefiniţie a masei. Legat tot de relaţia (1.2.15) trebuie adăugatcă forţa F şi impulsul p sînt mărimi aditive. De aici rezultă căvariaţia impulsului cauzată de două forţe diferite este egală cusuma variaţiilor impulsului cauzate de fiecare forţă în parte.Această afirmaţie exprimă principiul independenţei acţiunii forţelor.
în mecanica clasică se admite că masa este o mărime constantăcare nu depinde de viteză, de timp sau de alţi parametriicinematici. De aceea, ţinînd cont de (1.2.17) şi de (1.2.3) legeaa doua a dinamicii (1.2.15) se poate scrie şi sub forma
d2rm- - -= F. (1.2.18)
di2
Aceasta reprezintă ecuaţia vectorială a mişcării unei particule.în cazul coordonatelor carteziene (vezi § 1.1) din (1.2.18) seobţin următoarele ecuaţii scalare de mişcare ’
14
m AiL = jp m jLL = ]p m ikiL = (1.2.19)dt2 dt2 v di2
15
Fx, Fv şi Ft fiind componentele carteziene ale vectorului forţă.lor^V1'18'> Şi (1-2-19) sînt ecuaţii diferenţiale. Prinintegrareaior se obţin tuncţia vectorialăr = r(t, Cv C2, C6) (1.2.20)
respectiv funcţiile scalare® = x{t, Clf C2), y = y(t, C3, C4), 0 = z(t, C5, C6)
(1.2.21)* reprezintă variabila timp, iar Clf C2, ..., C6 sînt
constante de integrale. Pentru a determina valorile acestorconstante sînt necesare dat©
. suplimentare, care de obicei se dau sub forma condiţiiloriniţiale prin indicarea valorilor mărimilor ’ ’
ro = r(0), v0 = v(0) x0=x(0), vxQ = vx(0); y0 = y(0),^o = ^(0); z0=z(0), ^0=v2(0). (1.2.22)
Din relaţia (1.2.15) rezultă următoarea lege cle conservare aimpulsului unei particule : dacă forţa F care acţionează asupraunei particule este nulă(F = 0), impulsul particulei rămîne constant f deoarece-^- = 0 1Deoa-
• . V dt )’ rece p _ mv şi^ masa este o mărime constantă înseamnă că oparticulă, care-şi conservă impulsul execută o mişcare liberă (v =const.).
^ Din relaţia (1.2.18) scrisă pentru F # 0 rezultă că masa meste o masura a inerţiei particulei (adică o măsură a proprietăţiiparticulei de a-şi pastra mişcarea liberă). Aceasta deoarece,pentru a produce o modificare data (caracterizată prin mărimead2r/di2) a mişcării particulei fată de mişcarea liberă (inerţială),este nevoie de o forţă cu atît mai mare cu cît m este mai mare.
' O altă mărime care intervine în caracterizarea stăriidinamice de mişcare a unei particule este momentul cinetic Ldefinit prin relaţia
L = r x p. (1.2.23)Dacă se face derivarea în raport cu timpul a lui L şi se tine contde relaţiile (1.2.3), (1.2.15) şi (1.2.23) se obţine următorul şirde relaţii
dL dr dp~77 — — X P + r x —— = V X mv -f r X F = d
t dt dt
— 0 -(- rxF = M
adică ecuaţia de evoluţie a momentului
cineticaL Mir=M (L2-24>
1 — c. 1414
41
16
/
m,me-te mommt F !n raport ™Din relaţia (1.2.24) rezultă următoarea legede conservare a momentului vineţie al unei particule ■ dacă momentul forţei ceacţionează asupra unei particule este nul (M = 0), momentulcinetic al particulei respective se conservă (deoarece ăLjdt = 0).
O altă mărime care se întîlneşte în studiul mişcăriimecanice a particulelor este lucrul mecanic, care se defineşte înfelul următor : dacă o particulă supusă acţiunii unei forţe F
suferă o deplasare elementară dr(fig. 1.2.6) spunem că forţa F aefectuat asupra particulei un lucrumecanic elementare Sa/ definit prinrelaţia
= F-dr = F dr cos a. (1.2.25)Lucrul mecanic efectuat de forţa F
pentru deplasarea pe o distanţăfinită, de-a lungul unei curbe G
între punctele ^ şi r2) (fig. 1.2.6)este
1 şi 2 (de raze dat derelaţia
/•2 /*ra
F-dr. (1.2.26)(C)
în relaţiile (1.2.25) şi (1.2.26) folosirea simbolului 8 indicăfaptul că mărimea Sj/ nu este o diferenţială totală exactă şi deci
că lucrul mecanic depinde, în general, de curba pe care se facedeplasarea între punctele 1 şi 2.
în caracterizarea dinamică a stării de mişcare a particulelor se
foloseşte de asemenea mărimea fizică numită energie cinetică. Definirea
acestei mărimi se poate face prin rescrierea relaţiei (1.2.25).
Dacă se ţine cont de relaţiile (1.2.3), (1.2.15) şi (1.2.25) se
poate scriesau
unde mărimea T — — mv9
= dT (1.2.27)2 reprezintă energia cinetică a particulei.
Eelaţia (1.2.27) reprezintă forma diferenţială (sau locală) alegii variaţiei energiei cinetice. în formă integrală (sauglobală) legea respectivă se exprimă prin relaţiile
Această relaţie arată că lucrul mecanic efectuat de forţa F
'12
dpdi
mv2 j= d(T) = F • dr = vdi = d(rnv) • v =d I
mv;d T (1.2.28)
rra r2 r2
^ F • dr = ^ W = ^

17
între punctele 1 şi 2 (de vectori de poziţie rx şi r2) este egalcu variaţia energiei cinetice între aceleaşi puncte (poziţii).
18
^ O forţă care are proprietatea că lucrai mecanic efectuat deea între doua puncte nu depinde de traiectoria pe care se facedeplasarea între cele doua puncte (fig. 1.2.7) se numeşteconservativă. O asemenea forţă satis-I&CG rcl£ttl£t *fr* „ rH
\ F-dr = y F-dr.Jrl (C'J Jtl (C")
F ■ dr = 0(undeo semnifică
integrala pe un contur închis o). De aici prin apli-' J (C)-J
unde 8{G) reprezintă o suprafaţă netedă (fără singularităţi)arbitrară, care PI1/|ina P? ? n ̂ ul dS este un vector normal la elementul de
arie'I1'! .1 I ?elatia (1-2.31) fiind adevărată pentru o suprafaţa 6> arbitrara, rezulta că ea implică relaţia
v X F = 0.Atunci rezultă că forţa F este de form
amtrucit V X(vT/)=0 oricare ar fi V. Se poate foarte uşor vedea căîn cazul unei forţe conservative lucrul mecanic al forţei estelegat nemijlocit de variaţia funcţiei I . Dm acest motiv funcţia V= V(r) este denumită energie potenţială a particulei (considerate) înpoziţia r. Afirmaţiile anterioare pot fi ilustrate cu următorulşir de relaţii ’ ’
(1.2.34)
d Vdz
dz
(1.2.29)
(1.2.30)
Dm aceasta relaţie rezultă că lucrul mecanic efectuatde o forţă conservativă pe un contur închis este nul 7
adică rezultă relaţia ’ (C)
(1.2.32)
dx dy ds
j • (id® + jdy -f
kds) j = - dV.
dV . dV.i ~\ - - -i
dy J
dVSj/=F • dr= — v V dr= i + k —dy oz o x
d Vdx
dVdy
dSO’- (C) (1.2.31
)
carea teoremei Stokes rezultă
F • dr = CC (y X F)J-Js(C)
= - ( dV V dx dVF = — v*P(r) = )k (1.2.33)
19
De aici, prin integrare de-a lungul unei traiectorii care treceprin poziţiile r şi r2, se obţine ’
■**12= ^ 2 F dr = ^ dTF= - ^ dF = F(rx) - F(r2). (1.2.35)
Acestrezultat nearată că energia potenţială într-un punct rxse poate
defini în funcţie de valoarea ei într-un punct r2 prin relaţia
F(ri) = F(r2) + C *F dr. (1.2.36)
Deoarecepunctul r2 se poate alege arbitrar rezultă căenergiapotenţialăse defineşte pînă la o constantă arbitrară (F(r2)). Pentrucîmpurile de forţă pentru care F(rx) — F(r2) rămîne finit cînd |r2—rx| -> oo (cu rx, r2 4= 0). se poate alege zeroul scării energieipotenţiale astfel încît lim F(r2) =0.Atunci din (1.2.36) şe poate scrie 1
F(r) = — C F • dr = ’ (1.2.37)
Această relaţiearatăcă,pentru cîmpurile de forţă de tipulmenţionat,
energia potenţialăa unei particule într-un punct reste egală şi de semn
contrar cu lucrul mecanic necesar pentru a aduce particula de lainfinit în punctul respectiv.
Să mai consemnăm o relaţie referitoare la energia uneiparticule supusă acţiunii unei forţe conservative. Din relaţiile(1.2.27) şi (1.2.34) rezultă relaţia ’ ’
d(T + F) = dE = 0 (1.2.38)adică mărimea E = T + F — numită energia mecanicătotală aparticulei — rămîne constantă în timp. Eelaţia (1.2.38)reprezintă legea deconservare a energiei mecanice pentru o particulă supusă acţiunii uneiforţe conservative. ’
Să prezentăm acum cîteva consideraţii referitoare la mişcareamecanică a sistemelor de particule. Fie un sistem format din AT
particule punctuale de mase tox, m2, . . ., mN, ale căror poziţiisînt date de vectorii ri> r2> ■ > 1-A- şi ale căror impulsuri sîntpx, p2, ... ’ pA-, Pentru un asemeneasistem, în conformitate cu legea a doua a dinamicii, se pot scrierelaţiile
= F, = Ff> + £ F„ (1.2.39)■ Q* j=1
20
3**
21
unde F, reprezintă forţa totală care acţionează asupra particulei i,F|B) forţa care acţionează asupra particulei i din partea unor
corpuriaflate în exteriorul sistemului (le particule, iar F„forţa care actio- neajza asupra particulei i din partea particulei jdin interiorul sistemului. Legat de forţele l'H trebuie notat că, inconformitate cu lesrea a treia a dinamicii (1.2.6), ele satisfacrelaţiile
= ~ fm- (1.2.40)Problema directă a dinamicii sistemelor»de particule constă
în aflarea funcţiilor vectoriale r{ = r,(f) (care dau poziţiileparticulelor in funcţie n b ^t?°™ind de la cunoaşterea forţelor F< şiintegrarea ecuaţiilor
l^’blema mversă a dinamicii sistemelor de particuleconstă în aflarea, prin intermediul ecuaţiilor (1.2.39), aforţelor F, pornind de la cunoaşterea vectorilor de poziţie rt cafuncţii de timp (adică a funcţiilor vectoriale r* = T.,(t)). ’
Să stabilim acum cîtcva relaţii pentru mărimi cecaracterizează un sistem de particule in ansamblul său. Din(1.2.39) prin însumare si tinînd cont di_ (1.2.40) se obţine
’ ’A' dp, Nn NNS -7T = X F< = S + s F;i = I Ff> = F<*>. (1.2.41)1=1 Uf *=i <=i i,y= i <ti
Pe de altă parte se poate scrie
*=i i-i di di2 dt2<riN
X mivi— MR = M -^5- di2 di2
i=lCU
Marunea M reprezintă masa totală a sistemului de particuleiar R defineşte poziţia unui punct numit centru de masă (sau centrude inerţie) al sistemului de particule. Din (1.2.41) şi (1.2.42)rezultă relaţia ’d2RM - = F<£> ’dt2 ’
Această relaţie arată că centrul de masă al unui sistemde particule se mişca asemenea unei particule de masă egală cu masatotală a sistemulu
NI] «A
R = ------- - - -(1.2.43
)S nht=l
d2
di2 (1.2.42)
(1.2.44)
t = lJf = 5] mt,
iplasată în respectivul centru şi asupra căreia acţionează o forţăegală cu rezultanta forţelor exterioare. Din relaţiile anterioare sevede că forţele interioare FJ; nu exercită nici o influenţă asupramişcării centrului de masă.
Impulsul total al sistemului de particule prin definiţie este egalcu suma impulsurilor particulelor din sistem, adică
p = i ; p i = S «w = 4 S m ̂ ' 4 R - MX ’ (1-2-45>iti iT1 ( I t 1 di
Din (1.2.43) —(1.2.45) rezultă relaţia
Ap = d tDe aici se vede că dacă rezultanta
forţelor exterioare ce acţionează asupra unui sistem de particuleeste nulă (F(JJ) = 0), atunci impulsul total al sistemului se conservă(deoarece dP/di = 0 şi deci P = const.). Această afirmaţie exprimălegea de conservare a impulsului total pentru un sistem de particule. Din(1.2.45) se vede că viteza V a centrului de masă este constantă dacăimpulsul total al sistemului se conservă.
Momentul cinetic total al unui sistem de particule se defineşte prinrelaţia
F lE K (1.2.46)