generador solar de ciclo de aire
TRANSCRIPT

Memoria del Proyecto
Generador Solar de Ciclo de Aire.
Englobe Technologies and Systems S.L.
28 de Enero de 2010
2

Índice general
0.1. Memoria Técnica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130.2. Objetivos y resultados del proyecto . . . . . . . . . . . . . . . . . . . . . . 14
I Diseño conceptual 17
1. Estudio de viabilidad técnica 191.1. El motor GM GPU-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.2. Los motores Stirling de Philips . . . . . . . . . . . . . . . . . . . . . . . . 211.3. Cigüeñal hipocicloide. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.4. La Mecánica de Fluidos Computaconal . . . . . . . . . . . . . . . . . . . . 24
2. Análisis de viabilidad operacional 252.1. Análisis de radiación solar . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.1.1. Características de un observador en la Tierra . . . . . . . . . . . . 252.2. El sistema de captación solar . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.2.1. Concentrador solar . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.2.2. El receptor térmico . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.2.3. Generador eléctrico . . . . . . . . . . . . . . . . . . . . . . . . . . . 442.2.4. Conversión del calor en electricidad . . . . . . . . . . . . . . . . . . 452.2.5. Rendimiento del sistema conjunto . . . . . . . . . . . . . . . . . . . 47
2.3. Sistema de seguimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.3.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.3.2. Subsistema decisor . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.3.3. Subsistema actuador . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3. Viabilidad operacional. Estudio geográfico 573.1. Estudio de radiación solar en el territorio español . . . . . . . . . . . . . 57
3.1.1. Datos anuales de radiación solar . . . . . . . . . . . . . . . . . . . 593.1.2. Selección de ubicación del prototipo Stirling . . . . . . . . . . . . . 67
3.2. Análisis de viabilidad operacional del proyecto en conguración solar . . . . 693.2.1. Estimación de Generación y Potencia eléctrica . . . . . . . . . . . . 693.2.2. Análisis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 693.2.3. Análisis de Costes . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3

4 ÍNDICE GENERAL
4. Capacidad de integración dentro de la red eléctrica 794.1. Definición de tipo de instalación. Generación en grid vs Generación distri-
buida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 794.1.1. Granja /Central térmica solar Stirling (Magtel Renovables / En-
globe Technologies) . . . . . . . . . . . . . . . . . . . . . . . . . . . 804.1.2. Esquema de Generación Distribuida / Microgeneración . . . . . . 83
4.2. Requisitos y servidumbres para la inyección a red . . . . . . . . . . . . . . 894.2.1. Servidumbres del sistema de generación . . . . . . . . . . . . . . . 894.2.2. Funcionamiento genérico de un modulo de microgeneración de ge-
neradores stirling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5. Especificaciones y Características 955.1. Especificaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 955.2. Características del Sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.2.1. Características del sistema motor . . . . . . . . . . . . . . . . . . . 975.2.2. Características de las servidumbres solares . . . . . . . . . . . . . . 975.2.3. Conclusiones / Informe de estado del proyecto . . . . . . . . . . . . 985.2.4. Características de las servidumbres eléctricas . . . . . . . . . . . . 98
6. Análisis de las posibles patentes 996.1. Introducción. Las patentes en España . . . . . . . . . . . . . . . . . . . . . 99
6.1.1. Oficina Española de Patentes y Marcas . . . . . . . . . . . . . . . . 996.1.2. Oficina Europea de Patentes . . . . . . . . . . . . . . . . . . . . . 1026.1.3. Costes de las patentes . . . . . . . . . . . . . . . . . . . . . . . . . 1026.1.4. Las patentes de motores Stirling . . . . . . . . . . . . . . . . . . . 1036.1.5. Base de datos utilizada . . . . . . . . . . . . . . . . . . . . . . . . . 104
6.2. Análisis de tecnologias existentes. . . . . . . . . . . . . . . . . . . . . . . . 1056.2.1. ADI THERMAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1056.2.2. KOCKMUS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1076.2.3. QUIET REVOLUTION MOTOR COMPANY . . . . . . . . . . . 1086.2.4. SOLO KLEINMOTOREN GmbH . . . . . . . . . . . . . . . . . . . 1096.2.5. STIRLING ENERGY SYSTEMS, INC. . . . . . . . . . . . . . . . 1116.2.6. STM POWER, INC. . . . . . . . . . . . . . . . . . . . . . . . . . . 1136.2.7. TAMIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
II Diseño Preliminar 117
7. Modelo de funcionamiento térmico del motor 1197.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR . . . . . 119
7.1.1. DEFINICIÓN DEL MOTOR STIRLING SEGÚN SU CICLO . . . 1207.1.2. COMPONENTES DEL MOTOR . . . . . . . . . . . . . . . . . . . 1217.1.3. FUNCIONAMIENTO BÁSICO DEL MOTOR: . . . . . . . . . . . 1257.1.4. CICLO TERMODINÁMICO STIRLING . . . . . . . . . . . . . . 129

ÍNDICE GENERAL 5
8. Modelo de funcionamiento mecánico del motor 1418.1. Selección del mecanismo del motor . . . . . . . . . . . . . . . . . . . . . . 1418.2. Modelización y parametrización . . . . . . . . . . . . . . . . . . . . . . . . 1438.3. Características másicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
8.3.1. Cigüeñal (C) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1468.3.2. Discos (D y D’) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1478.3.3. Embolos (E y E’) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
8.4. Equilibrado estático y dinámico del mecanismo . . . . . . . . . . . . . . . 1508.4.1. Equilibrado del cigüeñal . . . . . . . . . . . . . . . . . . . . . . . . 1508.4.2. Equilibrado de los discos . . . . . . . . . . . . . . . . . . . . . . . . 151
8.5. Análisis cinemático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1518.6. Ligaduras del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1548.7. Cinética del mecanismo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
8.7.1. Cigüeñal (C) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1558.7.2. Disco D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1558.7.3. Disco D’ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1558.7.4. Émbolo E . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1568.7.5. Émbolo E’ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
8.8. Análisis dinamico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1568.8.1. Ecuaciones de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . 1578.8.2. Obtención de las reacciones y fuerzas internas . . . . . . . . . . . . 157
9. Determinación del rendimiento global 1599.1. PARTE TÉRMICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
9.1.1. TRABAJO REALIZADO POR UN MOTOR DE CICLO IDEALSTIRLING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
9.1.2. FLUJO DE CALOR EN UN MOTOR DE CICLO STIRLINGIDEAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
9.1.3. RENDIMIENTO DE UN MOTOR DE CICLO STIRLING IDEAL 1629.1.4. RENDIMIENTO EN EL REGENERADOR . . . . . . . . . . . . . 163
9.2. ANÁLISIS SIMPLIFICADO DE LAS PÉRDIDAS DE BOMBEO. . . . . 1709.3. ANÁLISIS SIMPLIFICADO DE LAS PÉRDIDAS EN LOS CAMBIADO-
RES DE CALOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1759.4. Rendimiento mecánico del sistema . . . . . . . . . . . . . . . . . . . . . . 178
9.4.1. Pérdidas cigüeñal-soporte,cigüeñal-discos y discos-émbolos . . . . . 1799.4.2. Pérdidas discos-corona . . . . . . . . . . . . . . . . . . . . . . . . . 1809.4.3. Pérdidas émbolos-cilindros . . . . . . . . . . . . . . . . . . . . . . . 181
10.Elección de los Materiales 18310.1. Elección del material para el receptor térmico de alta temperatura . . . . 18310.2. Material del regenerador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18410.3. Material del desplazador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
10.3.1. Pequeña reseña sobre el choque térmico. . . . . . . . . . . . . . . . 18610.3.2. Elección del material . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Generador Solar de Ciclo de Aire

6 ÍNDICE GENERAL
10.4. Material del émbolo de potencia y del resto de piezas del motor. . . . . . . 188
III Diseño detallado e implementación 189
11.Diseño del mecanismo del movimiento del émbolo 19111.1. Modelos termodinámicos simplificados . . . . . . . . . . . . . . . . . . . . 191
11.1.1. Ciclo Stirling ideal . . . . . . . . . . . . . . . . . . . . . . . . . . . 19211.1.2. Ciclo Stirling isotermo . . . . . . . . . . . . . . . . . . . . . . . . . 193
11.2. Estudio del movimiento libre del sistema . . . . . . . . . . . . . . . . . . . 19411.3. Optimización del par y la potencia del motor . . . . . . . . . . . . . . . . 196
11.3.1. Estudio de la influencia del radio de la corona . . . . . . . . . . . . 19811.3.2. Estudio de la influencia de la masa de los émbolos . . . . . . . . . 19811.3.3. Estudio de la influencia de la cilindrada del motor . . . . . . . . . 19911.3.4. Estudio de la influencia del régimen de giro . . . . . . . . . . . . . 20011.3.5. Estudio de la influencia de la relación de áreas y β . . . . . . . . . 20011.3.6. Resumen: selección de parámetros y representación de la curva de
par . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20311.4. Análisis de las reacciones internas . . . . . . . . . . . . . . . . . . . . . . . 206
11.4.1. Modelo mecánico del mecanismo . . . . . . . . . . . . . . . . . . . 20611.4.2. Sistema de ecuaciones del modelo isostático . . . . . . . . . . . . . 21111.4.3. Influencia de la longitud del cigueñal (l6) . . . . . . . . . . . . . . 21411.4.4. Influencia de la distancia de los discos a los émbolos (lEg) . . . . . 21611.4.5. Influencia del régimen de giro ( ˙θC) . . . . . . . . . . . . . . . . . . 22011.4.6. Influencia del radio de la corona (R) . . . . . . . . . . . . . . . . . 22411.4.7. Influencia de la masa de los discos (mD) . . . . . . . . . . . . . . . 22711.4.8. Influencia de la masa de los émbolos (mE) . . . . . . . . . . . . . . 23111.4.9. Resumen de resultados: conclusiones y representación de las reac-
ciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
12.Estudio de las pérdidas de carga del sistema 24112.1. Pérdidas debidas a la conducción del fluido de trabajo . . . . . . . . . . . 241
12.1.1. Pérdida de carga en el regenerador . . . . . . . . . . . . . . . . . . 24212.2. Pérdidas de carga en el cilindro caliente y frío. . . . . . . . . . . . . . . . . 242
12.2.1. Pérdidas en las zonas de calentamiento y enfriamiento. . . . . . . . 24212.3. Pérdidas debidas a la fricción en los contactos metálicos. . . . . . . . . . . 24412.4. Pérdidas de calor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
12.4.1. Pérdida debida a la regeneración. . . . . . . . . . . . . . . . . . . . 24512.4.2. Pérdida por transporte en el regenerador . . . . . . . . . . . . . . . 24512.4.3. Conducción en el cuerpo del motor. . . . . . . . . . . . . . . . . . . 24612.4.4. Pérdidas por conducción fuera del motor. . . . . . . . . . . . . . . 24712.4.5. Pérdidas por radiación . . . . . . . . . . . . . . . . . . . . . . . . . 24812.4.6. Pérdidas por bombeo . . . . . . . . . . . . . . . . . . . . . . . . . . 248

ÍNDICE GENERAL 7
13.Diseño detallado del regenerador 24913.1. DEFINICIÓN DE REGENERADOR . . . . . . . . . . . . . . . . . . . . . 24913.2. OTROS ASPECTOS SOBRE EL REGENERADOR: . . . . . . . . . . . . 25113.3. EL PROBLEMA DEL REGENERADOR . . . . . . . . . . . . . . . . . . 25413.4. Análisis Simplificado del Regenerador . . . . . . . . . . . . . . . . . . . . . 25813.5. SIMULACIONES NUMÉRICAS REALIZADAS PARA ESTUDIAR EL
COMPORTAMIENTO DEL REGENERADOR . . . . . . . . . . . . . . . 26113.6. SIMULACIÓN NUMÉRICA DE MAYOR ORDEN DE COMPLEJIDAD
PARA ESTUDIAR EL COMPORTAMIENTO DEL REGENERADOR . 272
14.Estudio de rotura y estimación de la vida 28314.1. Selección de rodamientos para la unión soporte-cigüeñal . . . . . . . . . . 28614.2. Selección de rodamientos para la unión cigüeñal-discos . . . . . . . . . . . 28714.3. Selección de rodamientos para la unión émbolos-discos . . . . . . . . . . . 288
15.Análisis paramétrico del diseño final 29115.1. ANÁLISIS PRELIMINAR DE LOS PROCESOS TERMODINÁMICOS
DEL SISTEMA SUPONIENDO UN CICLO SCHMIDT. . . . . . . . . . . 29215.2. ESTUDIO PRELIMINAR DE LOS PROCESOS DE CARGA Y DES-
CARGA COMBINADO CON LOS PROCESOS DE COMPRESIÓN YEXPANSIÓN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30215.2.1. Compresión y Carga . . . . . . . . . . . . . . . . . . . . . . . . . . 30215.2.2. Compresión y Descarga . . . . . . . . . . . . . . . . . . . . . . . . 30415.2.3. Expansión y Carga . . . . . . . . . . . . . . . . . . . . . . . . . . . 30515.2.4. Expansión y Descarga . . . . . . . . . . . . . . . . . . . . . . . . . 307
15.3. ESTUDIO DE LAS CONDICIONES EN EL REGENERADOR COMOZONA DE DESCARGA DESDE UN CILINDRO HACIA EL OTRO . . . 308
15.4. CÁLCULO DEL RETRASO QUE SE PRODUCE EN EL MOVIMIEN-TO DEL FLUIDO DE TRABAJO COMO CONSECUENCIA DE LAEXISTENCIA DEL REGENERADOR . . . . . . . . . . . . . . . . . . . . 309
15.5. COMENTARIO SOBRE LOS MODELOS DE DESCARGA Y DE COM-PRESIBILIDAD EN CADA UNO DE LOS CILINDROS EN CADA CA-SO CONSIDERADO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
15.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CON-JUNTO DE LOS DOS CILINDROS SIMULTÁNEAMENTE . . . . . . . 31115.6.1. CASO 1 COMPRESIÓN ISÓCORA . . . . . . . . . . . . . . . . . 31115.6.2. CASO 2 EXPANSIÓN POLITRÓPICA . . . . . . . . . . . . . . . 32615.6.3. CASO 3 EXPANSIÓN ISÓCORA . . . . . . . . . . . . . . . . . . 34015.6.4. CASO 4 COMPRESIÓN POLITRÓPICA . . . . . . . . . . . . . . 354
15.7. CONCLUSIONES FINALES . . . . . . . . . . . . . . . . . . . . . . . . . 369
16.Congelación del diseño y modelo CAD 373
17.Conclusiones 379
Generador Solar de Ciclo de Aire

8 ÍNDICE GENERAL
A. Análisis del funcionamiento de un motor de ciclo de aire 381A.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381
A.1.1. El motor de ciclo de aire. . . . . . . . . . . . . . . . . . . . . . . . 382A.2. Análisis del ciclo Stirling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
A.2.1. Cálculo del trabajo por ciclo. . . . . . . . . . . . . . . . . . . . . . 384A.2.2. Distribución universal de un motor Stirling. . . . . . . . . . . . . . 384
A.3. Aplicación a un motor de ciclo Shmidt . . . . . . . . . . . . . . . . . . . . 386A.4. Conclusiones y desarrollos futuros. . . . . . . . . . . . . . . . . . . . . . . 390.1. Código Fuente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 390
A. Programas desarrollados para el capítulo 9.4 395
B. Programas desarrollados para el capitulo 11 399B.1. Programa desarrollado para la determinación del movimiento libre(Sección
11.2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399B.2. Programa desarrollado para la optimización de la potencia (Sección 11.3) . 400B.3. Programa desarrollado para la optimización de las reacciones (Sección 11.4)405
C. Programas desarrollados para el modelo térmico del motor 415C.1. dibujar12b.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415C.2. dibujar12.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415C.3. dibujar23b.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416C.4. dibujar23.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416C.5. dibujar34b.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 417C.6. dibujar34.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 418C.7. dibujar41b.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 418C.8. dibujar41.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 419C.9. dibujarc.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 419C.10.dibujarp.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 420C.11.dibujarpvc.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 421C.12.dibujarpvp.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422C.13.mr12.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423C.14.mr23.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423C.15.mr34.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423C.16.mr41.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423C.17.p12b_cv.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423C.18.p12_cv.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423C.19.p23b_ep.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424C.20.p23_ep.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424C.21.p34b_ev.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424C.22.p34_ev.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424C.23.p41b_cp.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424C.24.p41_cp.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424C.25.t12b_cv.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424

ÍNDICE GENERAL 9
C.26.t12_cv.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425C.27.t23b_ep.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425C.28.t23_ep.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425C.29.t34b_ev.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425C.30.t34_ev.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425C.31.t41b_cp.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425C.32.t41_cp.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425C.33.v12.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425C.34.v23.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426C.35.v34.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426C.36.v41.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426C.37.Vcompresion.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426C.38.Vpotencia.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427
Generador Solar de Ciclo de Aire

10 ÍNDICE GENERAL

Introducción
Existen dos grandes familias de energías renovables ya implantadas en Espa ña, laenergía eólica y la solar. La tendencia durante los últimos años hace intuir que la propor-ción del total de la energía eléctrica producida en España mediante fuentes renovablescrecerá sostenidamente durante, por lo menos, una década. De las dos fuentes menciona-das es la eólica la que cuenta hoy con una mayor potencia instalada debido a su mayorfacilidad de instalación, mantenimiento y porque España es un país productor de aero-generadores.
Figura 1: Motor Stirling beta
Si bien España es uno de los países europeos con mayor radiación solar por metrocuadrado (aproximadamente 1 kilowatio por metro cuadrado de media anual) ni la energíasolar térmica ni la solar fotovoltaica parecen imponerse como alternativas viables parala producción de energía barata.
11

12 ÍNDICE GENERAL
La tecnología solar fotovoltaica es desarrollada y fabricada en los países asiáticos yEspaña es un importador.
La motivación para la instalación de paneles solares no ha puramente energéticasino que ha obedecido a criterios de carácter nanciero.
Figura 2: Motor Stirling beta
Mientras tanto, la energía solar térmica ha sido relegada a un papel secundario cuandoya se ha implantado con éxito en el sur de California, cerca de la ciudad de San Diego,en condiciones similares a las de zonas como Andalucía, Murcia o Castilla la Mancha.
A diferencia de lo que se podría pensar, la energía solar térmica tiene mayor rendi-miento de conversión que la solar fotovoltaica, aunque en esta conversión se haga impres-cindible contar con piezas móviles con su consiguiente rozamiento. En la energía solarfotovoltaica la fuerza electromotriz se provoca iluminando un semiconductor, cuando secalienta, tal como sucede con los procesadores de los ordenadores, pierde rendimiento.Si bien los paneles solares funcionan con rendimientos cercanos al 50% en el espacio, enzonas especialmente calurosas y sin un mantenimiento exhaustivo este porcentaje puededescender hasta el 10%.
La energía solar térmica tiene a su vez múltiples variantes. La primera es la energía

ÍNDICE GENERAL 13
solar térmica de alta concentración en el que un gran número de espejos planos reejanla luz solar a lo alto de una columna donde se encuentra un tanque de agua. Esta aguahierve a presión para producir energía mediante un ciclo cerrado de vapor. Otra opciónes la de calentar un tubo de agua, también a presión, mediante espejos parabólicos. Enambos casos se requiere una gran instalación que no es realmente rentable por debajo depotencias de los 200MW.
Figura 3: Primera propuesta del bloque motor.
Existe una tercera alternativa, el uso de motores térmicos de ciclo de aire para laconversión de energía solar térmica en energía mecánica. Luego se les puede acoplar ungenerador para producir, gracias al movimiento de rotación de un cigüeñal, energía eléc-trica. De todos los posibles motores de ciclo de aire aplicables el que ha mostrado mejorcomportamiento es el motor de ciclo Stirling. Estos motores, capaces de producir un am-plio rango de potencias, son las máquinas de mayor rendimiento global conocido. No seha descubierto aún una manera más eciente de convertir energía térmica en mecánica.
El desarrollo de Englobe Technologies consiste en un motor Stirling acompañado deun conjunto de seervidumbres que permiten una configuración solar térmica medianteconcentrados solar, receptor y generador que recibe la potencia mecánica al eje y latransforma en potencia elécrica.
0.1. Memoria Técnica
El resumen y recolección de los trabajos realizados quedan reflejados en el presentedocumento denominado MEMORIA TÉCNICA DEL PROYECTO GENERADOR SO-LAR DE CICLO DE AIRE.
Generador Solar de Ciclo de Aire

14 0.2. OBJETIVOS Y RESULTADOS DEL PROYECTO
La estructura del documento sigue el orden establecido en la propuesta de desarrollode proyecto inical que se presentó al IMADE en el año 2009 con motivo de la convocato-ria del PIE. Si bien el desarrollo de los trabajos se ha realizado siguiendo el calendario queimponían los desarrollos y la realimentación constante de diseño. De esta forma, se puedeencontrar entre los primeros apartados relativos a la viabilidad del proyecto datos de laconclusión y configuración definitiva del trabajo relativos a las características principa-les últimas del motor y servidumbres que permiten hacer una estimación de viabilidadeconómica de un proyecto de planta de configuración solar planteada.
0.2. Objetivos y resultados del proyecto
Se reproduce a continuación los objetivos del proyecto tal y como fueron planteadosal IMADE en la Mamoria Técnica Ampliada.
Figura 4: Fase de análisis mecánico. Modelo simplificado del cigüeñal
El regenerador es un cambiador de calor pasivo que se sitúa entre el cilindro de poten-cia (caliente) y el cilindro de compresión (frío). El objetivo del regenerador es tomar calorde un flujo caliente y devolverlo cuando el mismo ujo viaja por él en sentido contrario.Esta labor debe efectuarse con el mínimo volumen y la mínima pérdida de carga posibles.Para su estudio se pueden aplicar pocas simplicaciones: el ujo es compresible, la densidades variable, existe transferencia de calor con las paredes y aparecen efectos de pérdida depresión por rozamiento. Obtener un modelo de primer orden requiere entender comple-tamente el problema, incluso las condiciones adicionales introducidas por la geometríadel regenerador. Para ello se utilizará la Mecánica de Fluidos Computacional con el ob-jetivo de obtener las correlaciones necesarias entre temperaturas, velocidades y presiones.
ÍNDICE GENERAL 15
Las novedades referentes al diseño mecánico son dos: la variación del ángulo de des-fase entre los dos cilindros y la aplicación del mecanismo del cigüeñal rodante. El ángulode desfase de 90 grados por motivos puramente convencionales y de facilidad de construc-ción pero no hay ninguna evidencia cientíca que este desfase es el optimo para cualquiermodelo de motor. El objetivo es mantener este ángulo como variable durante todo el pro-ceso de desarrollo y determinarlo mediante un método de optimización automática juntocon el resto del motor. El cigüeñal rodante se basa en unir el cigüeñal a un disco deinercia y la biela a éste. Este mecanismo permite que no haya movimiento relativo entrela biela y el pistón reduciendo las fuerzas de rozamiento entre el pistón y la camisa en dosórdenes de magnitud. Este sistema ya ha sido patentado y ensayado sin éxito en motoresde combustión interna por BMW pero nunca ha sido aplicado a motores de ciclo de aire.Se espera su aplicación con éxito porque todas las condiciones que provocaron su fracasoen los intentos anteriores no existen en los motores Stirling. Un diseño de motor de ciclode aire con este mecanismo sería susceptible de ser patentado.
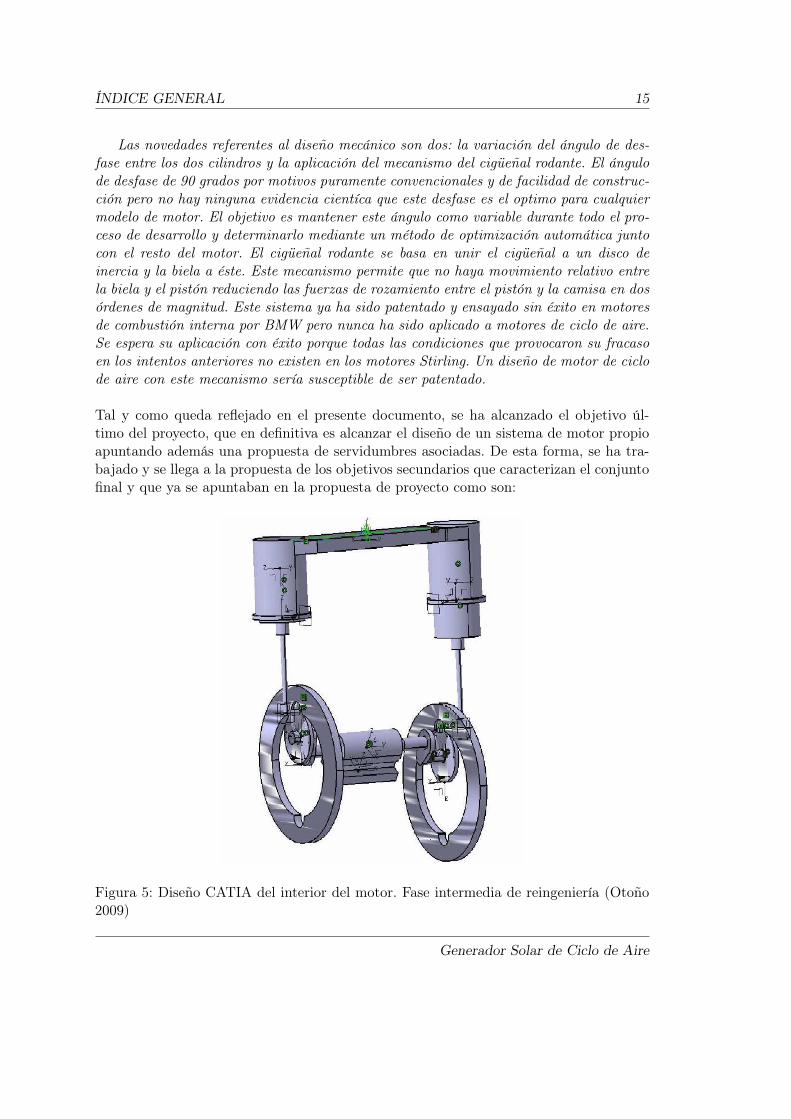
Tal y como queda reflejado en el presente documento, se ha alcanzado el objetivo úl-timo del proyecto, que en definitiva es alcanzar el diseño de un sistema de motor propioapuntando además una propuesta de servidumbres asociadas. De esta forma, se ha tra-bajado y se llega a la propuesta de los objetivos secundarios que caracterizan el conjuntofinal y que ya se apuntaban en la propuesta de proyecto como son:
Figura 5: Diseño CATIA del interior del motor. Fase intermedia de reingeniería (Otoño2009)
Generador Solar de Ciclo de Aire

16 0.2. OBJETIVOS Y RESULTADOS DEL PROYECTO
Se lleva a cabo el diseño y estudio de la pieza del regenerador alcanzando unaconfiguración de sección hexagonal a su vez compuesta de múltiples canales hexa-gonales.
Para los estudios relativos a los fenómenos fluidodinámicos y térmicos de carga/-descarga del motor se cuenta con la consultoría de alto nivel del Labooratorio deMecánica de Fluidos Computacional de la Escuela Técnica Superior de IngenierosAeronáuticos.
Para el análisis CFD del regenerador cuyos resultados quedan expuestos en el pre-sente documento también se cuenta con el Laboratoriio de CFD de la ETSIA.Sus análisis han permitido realizar la propuesta basada del regenerador hexagonala partir de las simulaciones computacionales de mecánica de fluidos de ldistintasgeometrás del mismo.
Se realizan múltiples análisis mecánicos del motor alcanzándose distintos diseñosintermedios para finalmente congelar el diseño de una solución a finales de 2009que queda reflejada en el presente documento.
Se lleva por otro lado a cabo un análisis y estudio minucioso de las respuestas enrendimiento a los cambios de desfase entre pistones con vistas a comprobar losposibles beneficios de una configuración distinta a la del desfase de 90º. Finalmentetras las comprobaciones pertinentes el diseño final acaba reflejando un desfase de90º al no haberse obtenido mejora de eficiencia en las alternativas planteadas.

Parte I
Diseño conceptual
17


Capítulo 1
Estudio de viabilidad técnica
El motor Stirling no es ni mucho menos un invento novedoso. El reverendo RobertStirling construyó el primer motor de ciclo de aire a mediados del siglo XIX y desdeentonces la técnica aplicada a este tipo de motores ha ido avanzando a ritmo lento peroconstante.
Desde un punto de vista meramente técnico el proyecto pretende construir desdecero un motor Stirling teniendo en cuenta todo lo aprendido durante este más de sigloy medio. Es una información fácilmente accesible porque muchos de estos proyectos hansido financiados por fondos públicos. Las innovaciones que pretendemos introducir sonlimitadas en número, pero creemos que decisivas en su efecto.
La mayoría de diseños anteriores de motores Stirling obedecen a las siguientes nece-sidades:
Producción de energía eléctrica a partir de un combustible líquido y un quemadorde alto rendimiento
Refrigeración a bajas temperaturas
Producción de nitrógeno líquido
Producción de energía sin vibraciones para sondas y satélites.
Propulsión de vehículos
Planta de potencia para equipamiento industrial
También se han utilizado motores Stirling para la aplicación que cubre este proyecto: lageneración de energía eléctrica a partir de radiación solar, pero en todos los casos losmotores utilizados provienen de otras aplicaciones. Uno de los casos más significativoses el motor de United Stirling, una compañía sueca que diseña y vende motores parageneradores solares de hasta 4 kW. El diseño original fue concebido para la propulsiónde vehículos, de hecho su motor P40 fue instalado durante los años 80 en un Opel Corsa.
Los criterios de diseño no fueron la generación de energía con un alto rendimientoy una vida estimada larga sino una buena respuesta de potencia en todos los regímenes
19

20
Figura 1.1: Modelo de United Stirling para la propulsión de vehículos.

CAPÍTULO 1. ESTUDIO DE VIABILIDAD TÉCNICA 21
de funcionamiento. Es en la actualidad el motor más utilizado en generación de energíasolar.
A continuación se describe cada uno de los proyectos de diseño y construcción de unmotor Stirling completamente documentados y que han sido concluidos con éxito. Sonsin duda la mayor demostración de la viabilidad del proyecto.
1.1. El motor GM GPU-3
Este motor fue diseñado por General Motors para la fabricación de una GPU, ungenerador de corriente eléctrica portátil de bajo consumo. Aunque no se publicó la colec-ción completa de planos constructivos los informes científicos y técnicos son públicos aligual que las especificaciones de su funcionamiento y detalles constructivos de las piezasclave.
Es un motor con cigüeñal rómbico, un diseño original de Philips, y su principal criteriode diseño es mantener un consumo mínimo con niveles de ruido muy bajos. De hecho seproclamaba que en funcionamiento normal el motor emitía un zumbido que difícilmentese asociaba a su propio funcionamiento.
Con una cilindrada de 232 cc. y utilizando hidrógeno como fluido de trabajo propor-cionaba una potencia de unos 4 KW, suficiente para generar energía eléctrica para unavivienda de tamaño medio.
1.2. Los motores Stirling de Philips
Durante casi medio siglo el único, en el que los motores de combustión interna des-plazaron a los motores de ciclo de aire de la mayoría de aplicaciones industriales, Philipsfue uno de los pocos (sino el único) fabricante de motores Stirling del mundo. Cuentancon más de 30 modelos de distintas cilindradas y para aplicaciones muy diversas desdela criogenización a bajas temperaturas o la generación de nitrógeno líquido a presiónambiente.
De todos los modelos el que se describe con más detenimiento en la documentaciónpública es el motor 1-98, del que se derivaron la mayoría de los modelos que vendióPhilips durante la segunda mitad del siglo XX. Era un motor con cigüeñal rómbico deunos 100 cc con una gran eficiencia indicada y de carnot, cercana al 50% y muy superiora cualquier otro motor térmico de la época.
Podía utilizar prácticamente cualquier fluido de trabajo pero el máximo rendimientose alcanzaba con hidrógeno a alta presión, en cuyo caso la potencia indicada llegabaa los 8 kW, suficiente para propulsar un vehículo pequeño y más que suficiente paraproporcionar energía eléctrica como GPU.
Otra de las ventajas del motor Stirling de Philips como GPU era su bajo ruido, inferiora los 60 db, y era capaz de funcionar durante unas 1000 horas sin mantenimiento.
Generador Solar de Ciclo de Aire

22 1.2. LOS MOTORES STIRLING DE PHILIPS
Figura 1.2: Sección del motor General Motors GPU-3

CAPÍTULO 1. ESTUDIO DE VIABILIDAD TÉCNICA 23
Figura 1.3: Sección del motor Philips Type MP 1002 C
Figura 1.4: Imagen del generador Philips basado en el motor Type MP 1002 C
Generador Solar de Ciclo de Aire

24 1.3. CIGÜEÑAL HIPOCICLOIDE.
1.3. Cigüeñal hipocicloide.
Esta es quizás la innovación más importante que se quiere introducir en un motorStirling para transformación de energía solar-termica.
El Cigüeñal hipocicloide obedece a una de las propiedades más conocidas de la cine-mática básica y es uno de los mecanismos más patentados de la historia en multitud deaplicaciones. Sin embargo en la mayoría de casos en los que se diseña un cigüeñal paramotores alternativos de combustión interna su aplicación es imposible.
Creemos haber detectado los errores por los que las anteriores aplicaciones del dichosistema no fueron exitosas.
La primera es la utilización del mecanismo en motores de combustión interna conaltas relaciones de compresión. En estos casos los picos de presión son tales que el disconecesario para la construcción del cigüeñal terminaba deformándose plásticamente. Lasegunda es que, para asegurar el funcionamiento correcto del mecanismo, se incluíanengranajes dentados. Dichos engranajes se deterioraban a gran velocidad debido a lasvariaciones de presión en la cámara; mientras los dientes de una zona casi no teníandesgaste los de la zona que soportaban la mayoría de las tensiones duraban unas pocashoras. En un motor de ciclo de aire, con variaciones de presión mucho menores, losengranajes dentados pueden suprimirse completamente sin ninguna penalización.
1.4. La Mecánica de Fluidos Computaconal
Uno de los factores esenciales en la viabilidad de un proceso de diseño es sin dudala precisión de las herramientas utilizadas. Los primeros motores de ciclo de aire demediados del siglo XIX fueron diseñados en gran medida por prueba y error. De hechopor aquél entonces no se conocían ni los principios básicos del funcionamiento de un motortérmico, independientemente del principio de funcionamiento. Sin embargo muchas de lassoluciones que se aplicaron entonces siguen presentes hoy en algunos modelos, como elregenerador de malla metálica claramente mejorable.
Durante el auge de los motores Stirling durante la crisis del petróleo en los años 70 losordenadores no eran lo suficientemente potentes como para realizar cálculos más allá deevaluar funciones o ejecutar pequeños programas. La mayoría de modelos utilizados enla actualidad datan de entonces. Las herramientas de diseño eran la experiencia previay los experimentos en laboratorio. Esto significa que la capacidad de variación respectoal diseño anterior era muy limitada y que no se aplicaban ciertas mejoras simplementeporque su efecto era demasiado difícil de medir.
No se han encontrado esfuerzos para describir piezas de un motor Stirling en tresdimensiones mediante la Mecánica de Fluidos Computacional. Ni siquiera las piezas mássimples desde el punto de vista de la simulación como el regenerador. En este caso el usodel CFD es una apuesta segura y sólo puede mejorar el proceso de diseño y con ello laviabilidad del proyecto.
Capítulo 2
Análisis de viabilidad operacional
2.1. Análisis de radiación solar
La radiación solar corresponde a la energía radiante procedente del Sol en forma deradiación electromagnética como resultado de reacciones nucleares de fusión que tienenlugar fundamentalmente en la parte más interna o núcleo de este astro. Esta energía debeser transferida a la superficie exterior del Sol para luego ser radiada al espacio.
La distribución espectral de la energía del Sol que incide sobre la superficie de laTierra varía en función de la distribución de la radiación solar en el espacio y de losconstituyentes que forman la atmósfera terrestre.La intensidad de radiación solar extraterrestre (Re) que recibe la Tierra por parte delSol varía de acuerdo a la distribución de la radiación solar en el espacio.
La intensidad de radiación solar global (Rg) que llega a la Tierra varía de acuerdo aciertos factores atmosféricos relacionados con la composición de la atmósfera terrestre.Esta interacción afecta la dirección e intensidad de los rayos del Sol, generando dos nuevosflujos de energía radiante denominados radiación solar directa (Rdir) y radiación solardifusa (Rdif) El flujo de radiación solar global que se propaga en distintas direcciones esconocido como radiación solar difusa (Rdif)
2.1.1. Características de un observador en la Tierra
La cantidad de radiación solar que llega a la Tierra será inversamente proporcionalal cuadrado de la distancia que existe entre el Sol y la Tierra. Anualmente la Tierra giraalrededor del Sol describiendo una trayectoria elíptica que dura aproximadamente 365días. Sin embargo, dentro de esta órbita conocida como eclíptica, el astro solar no seubica en su centro, sino que se encuentra desplazado hacia uno de los extremos de dichaórbita.La distancia media entre el Sol y la Tierra (r0) abarca precisamente 149.597.890 kilóme-tros y a esta distancia se la denomina UA (unidad astronómica)
25

26 2.1. ANÁLISIS DE RADIACIÓN SOLAR
Figura 2.1: Distribución de la radiación solar
Figura 2.2: Espectro de la radiación solar extraterrestre.

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 27
Figura 2.3: Curva de variación de la distancia entre el sol y la tierra
El movimiento de rotación que produce el día y la noche lo realiza la Tierra sobresi misma alrededor de un eje conocido como eje polar, el cual está inclinado aproxima-damente 23,5º con respecto a la normal al plano eclíptico. A lo largo del año el ánguloentre el eje polar y la normal al plano eclíptico permanece sin variación, lo mismo esválido para el ángulo entre el plano ecuatorial terrestre y el plano eclíptico. Sin embargo,el ángulo que existe entre el plano ecuatorial terrestre y la línea que une los centros delSol y la Tierra cambia de forma continua. Este ángulo que se representa a través de laletra δ es denominado declinación solar y se debe a la inclinación que presenta el eje entorno al cual gira la Tierra.
La posición del sol respecto a un observador del plano terrestre queda determinada através de un conjunto de variables de lo definen univocamente.
Variables de posicionamiento
Se definen a continuación el conjunto de variables de posición respecto al sol:
Zenit (θz): ángulo que se forma entre la línea zenit del observador y la línea queune al observador con el Sol.
Elevación o altura solar (α): altura angular del Sol sobre el horizonte celeste delobservador.
Azimut (φ) : desviación angular de la proyección del rayo solar en el plano horizontalcon respecto al meridiano local.
Declinación solar (δ): corresponde a la posición angular del Sol durante el día conrespecto al plano del ecuador.
Latitud geográfica (φ): corresponde a la posición angular hacia el norte o el sur delecuador.
Generador Solar de Ciclo de Aire
28 2.1. ANÁLISIS DE RADIACIÓN SOLAR
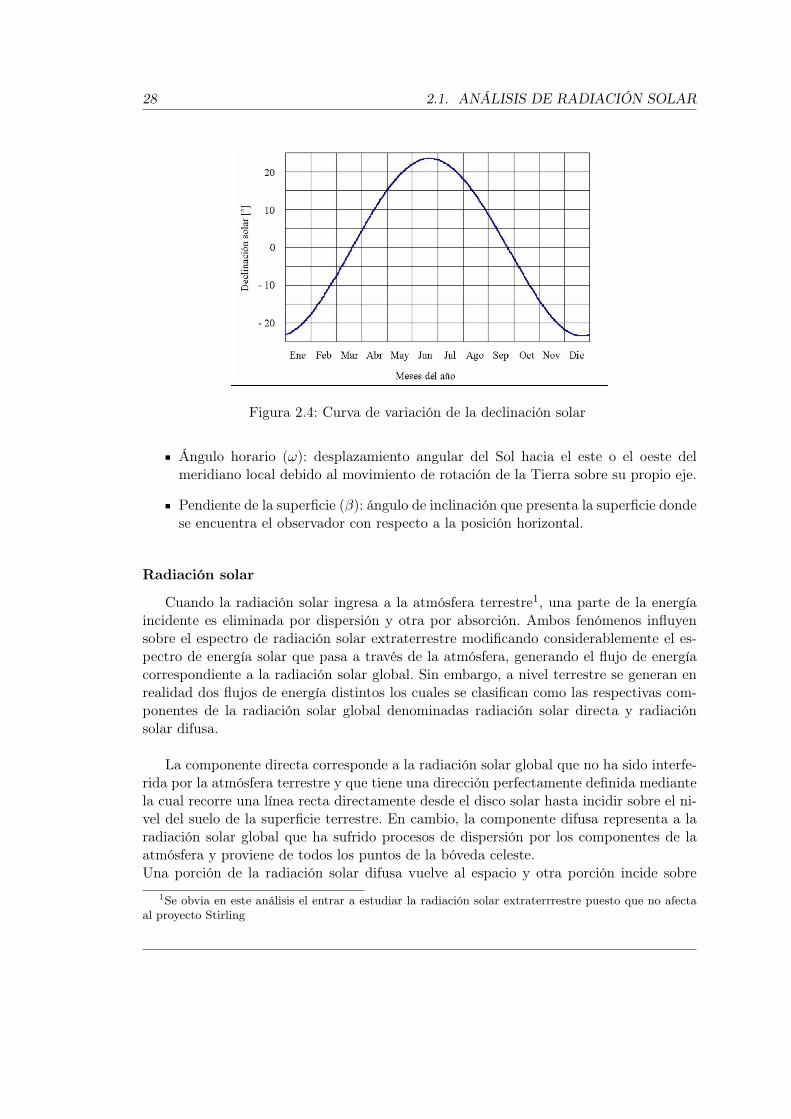
Figura 2.4: Curva de variación de la declinación solar
Ángulo horario (ω): desplazamiento angular del Sol hacia el este o el oeste delmeridiano local debido al movimiento de rotación de la Tierra sobre su propio eje.
Pendiente de la superficie (β): ángulo de inclinación que presenta la superficie dondese encuentra el observador con respecto a la posición horizontal.
Radiación solar
Cuando la radiación solar ingresa a la atmósfera terrestre1, una parte de la energíaincidente es eliminada por dispersión y otra por absorción. Ambos fenómenos influyensobre el espectro de radiación solar extraterrestre modificando considerablemente el es-pectro de energía solar que pasa a través de la atmósfera, generando el flujo de energíacorrespondiente a la radiación solar global. Sin embargo, a nivel terrestre se generan enrealidad dos flujos de energía distintos los cuales se clasifican como las respectivas com-ponentes de la radiación solar global denominadas radiación solar directa y radiaciónsolar difusa.
La componente directa corresponde a la radiación solar global que no ha sido interfe-rida por la atmósfera terrestre y que tiene una dirección perfectamente definida mediantela cual recorre una línea recta directamente desde el disco solar hasta incidir sobre el ni-vel del suelo de la superficie terrestre. En cambio, la componente difusa representa a laradiación solar global que ha sufrido procesos de dispersión por los componentes de laatmósfera y proviene de todos los puntos de la bóveda celeste.Una porción de la radiación solar difusa vuelve al espacio y otra porción incide sobre
1Se obvia en este análisis el entrar a estudiar la radiación solar extraterrrestre puesto que no afectaal proyecto Stirling

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 29
Figura 2.5: Variables de posicionamiento
Figura 2.6: Recorrido del sol en el hemisferio terrestre en solsticios de invierno, equinocciosy solsticio de verano.
Generador Solar de Ciclo de Aire

30 2.1. ANÁLISIS DE RADIACIÓN SOLAR
Figura 2.7: Esquema de posición del observador frente al sol
el nivel del suelo de la superficie terrestre. La radiación solar se genera analiticamentetomando en cuenta la evolución astronómica de la radiación para una latitud determi-nada y representa el valor de radiación que recibe la tierra en el límite superior de laatmósfera.La irradiancia (cantidad de energía) durante un periodo de tiempo se puede calcular apartir de la expresión diferencial:
dG0 =IscCosΘz
ρ2dt
Isc es la constante solar, 4921 kJ m^2 h^-1
ρes el factor de corrección de la distancia al sol
Θzes el ángulo cenital
SW utilizado
En los apartados relativos al análisis y explotación del medio radiante, así como en elcapítulo dedicado a la localización de la ubicación del sistema, se ha utilizado diverso SWOpen Source de distintos centros de investigación. Los principales utilizados han sido:
SOLTRACE: código desarrollado por el National Renewable Energy Laboratory
HOMER: código desarrollado por el National Sandia Laboratory (Department ofEnergy)

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 31
Figura 2.8: Simulación de Soltrace del Colector Solar de Disco Parabólico
Generador Solar de Ciclo de Aire

32 2.2. EL SISTEMA DE CAPTACIÓN SOLAR
2.2. El sistema de captación solar
El medio de captación solar tiene una configuración de disco al que se denominaconcentrador y será el principal componente del sistema de captación. Este disco recolectala energía radiante del sol y la enfoca en una pequeña área. De esta forma la resultantede la energía calorífica proyectada sobre toda el área del disco queda concentrada en unmínima sección facilitando el manejo de ésta.
El conjunto concentrador cuenta con un conjunto de motores que permite seguir latrayectoria del sol a lo largo de un día.
El receptor térmico es la superficie de concentración entre el concentrador y elmotor, absorbe los rayos reflejados por el concentrador y los transforma en unafuente caliente que transfiere el motor stirling.
La unidad principal de generación está compuesta por el propio motor Stirling cuyofuncionamiento da lugar a un movimiento de rotación de un cigüeñal acoplado aun generador y a través del cual se obtiene la energía eléctrica.
La transferencia de calor al motor stirling posibilita el funcionamiento de éste ya quesu requisito de funcionamiento es la existencia de un gradiente de temperatura. El mo-vimiento mecánico de rotación del motor es transferido a un generador acoplado a éstepara la generación de energía eléctrica.
2.2.1. Concentrador solar
El sistema concentrador solar de espejos tiene una forma de paraboloide lo que per-mite ubicar el receptor térmico y el motor a lo largo del eje focal del mismo a fin detener una pequeña zona donde se produce la concentración de rayos solares. Con estaconfiguración se ha demostrado en prototipos de motores Stirling que es posible alcanzarunos rendimientos de hasta el 30% en la conversión de energía solar a eléctrica.
Caracterísicas del concentrador
Forma y construcción
La forma del concentrador es la de un paraboloide debido a que se hace coincidir elcentro focal del mismo con el receptor térmico lo que habilita la concentración de rayosincidentes en el colector en un punto, el receptor.
La forma del concentrador es la de un paraboloide pudiendo aproximarse mediantela pequeña sección de una esfera de gran radio. El conjunto reflectante puede estarconstituido por:
• Múltiples espejos en una estructura de membrana que conforman la superficiede paraboloide.
• Un solo espejo con la forma de paraboloide.

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 33
Figura 2.9: Concentrador solar Stirling de configuración parabólica a partir de estructurade membrana y espejos parabólicos
Figura 2.10: Tipos de concentradores
Generador Solar de Ciclo de Aire

34 2.2. EL SISTEMA DE CAPTACIÓN SOLAR
Figura 2.11: Concentrador solar Stirling de configuración parabólica a partir de espejosesféricos

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 35
Figura 2.12: Concentrador solar Stirling de configuración parabólica
• Múltiples espejos circulares dispuestos de tal forma que aproximen en su con-junto un paraboloide.
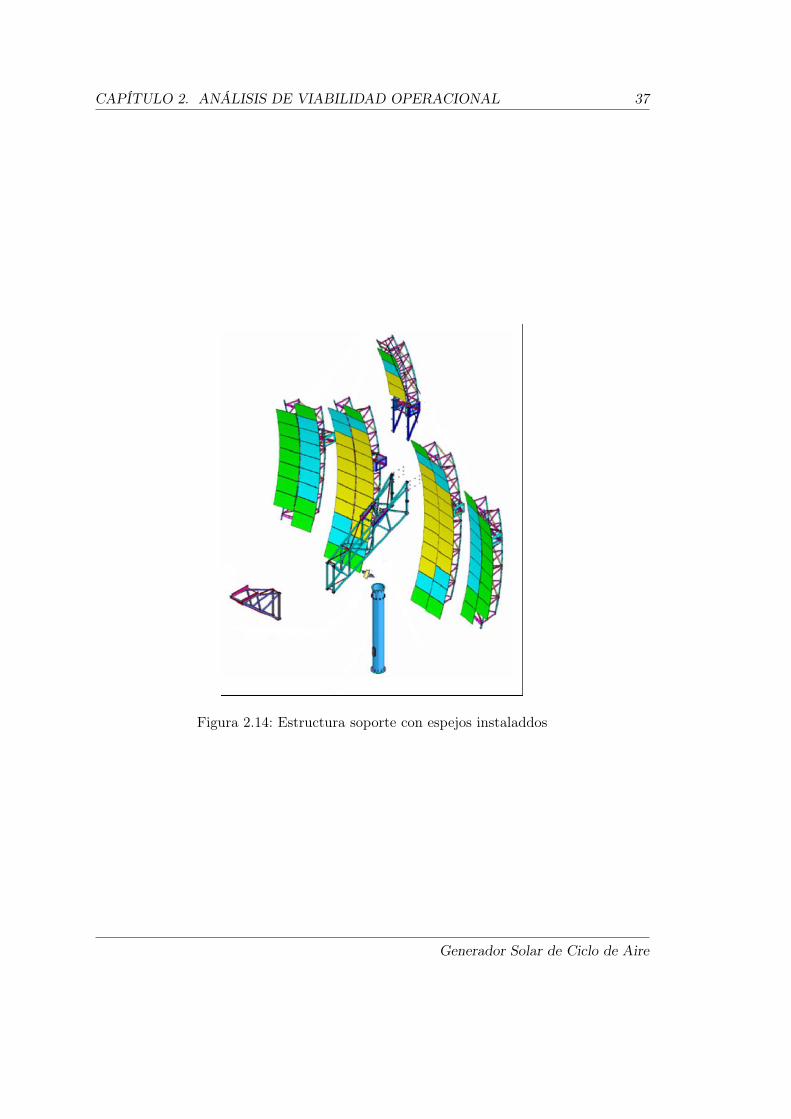
En el proyecto Stirling de Englobe Technologies se escoge una forma de colectorparabólico conformado a partir de una estructura modular portante sobre la quese sitúan los espejos en una malla o membrana. El cuerpo de espejo está formadopor un conjunto de piezas individuales rectangulares acombadas a partir de unasección de esfera de gran radio lo que facilita y abarata su construcción, montaje ymantenimiento.
Principales características de la estructura portante2
• La estructura portante es de tipo celosía configurando el mallado de la mismavigas en una configuración espaciada triangular. El conjunto entramado estáformado por 5 módulos apoyados en una estructura soporte o brazos paraleloseje horizontal y que se apoya en el pedestal formando una viga en T quesoporta el conjunto de celosía: un módulo central y 2 módulos laterales.
◦ El conjunto está formado por 450 pequeñas vigas de acero laminado de 18mm de sección, 50 cm de longitud c/u en disposición de celosía medianteentramado Warren.◦ El peso del conjunto motor-generador es de 350kg y está sostenido en vilo
por el brazo central, existiendo un refuerzo en esa zona pasando a ser lasbarras que componen la celosía del brazo de 22 mm de sección.
2La estructura portante escogida es una adaptación del diseño del Department of Energy para elSandia National Laboratory.
Generador Solar de Ciclo de Aire

36 2.2. EL SISTEMA DE CAPTACIÓN SOLAR
Figura 2.13: Sección de la estructura portante
• Las cargas de la estructura portante y el brazo soporte del conjunto motorson transmitidas a la estructura horizontal que a su vez transmite éstas alpedestal base de toda la estructura.
• La estructura está a su vez montada sobre un pedestal, contando con servo-motores para el control y orientación de la misma.
• El brazo articulado central empotrado está formado por una estructura encelosía en forma de viga empotrada en el pedestal. Este brazo sostiene elconjunto bloque motor-generador y lo mantiene en una posición relativa y fijaal conjunto de espejos de tal forma que el receptor térmico coincide con el focodel paraboloide.
• La distancia focal, el punto donde se va a encontrar el receptor, está situadaa 7.5 m del conjunto de espejos.
Tamaño
El tamaño del concentrador depende de la potencia del conjunto bloque motor. Enlas primeras etapas de proyecto se decidió dimensionar hasta un motor de medio porteentro los stirling pero de una potencia máxima entre los diseños existentes, en este caso
CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 37
Figura 2.14: Estructura soporte con espejos instaladdos
Generador Solar de Ciclo de Aire
38 2.2. EL SISTEMA DE CAPTACIÓN SOLAR
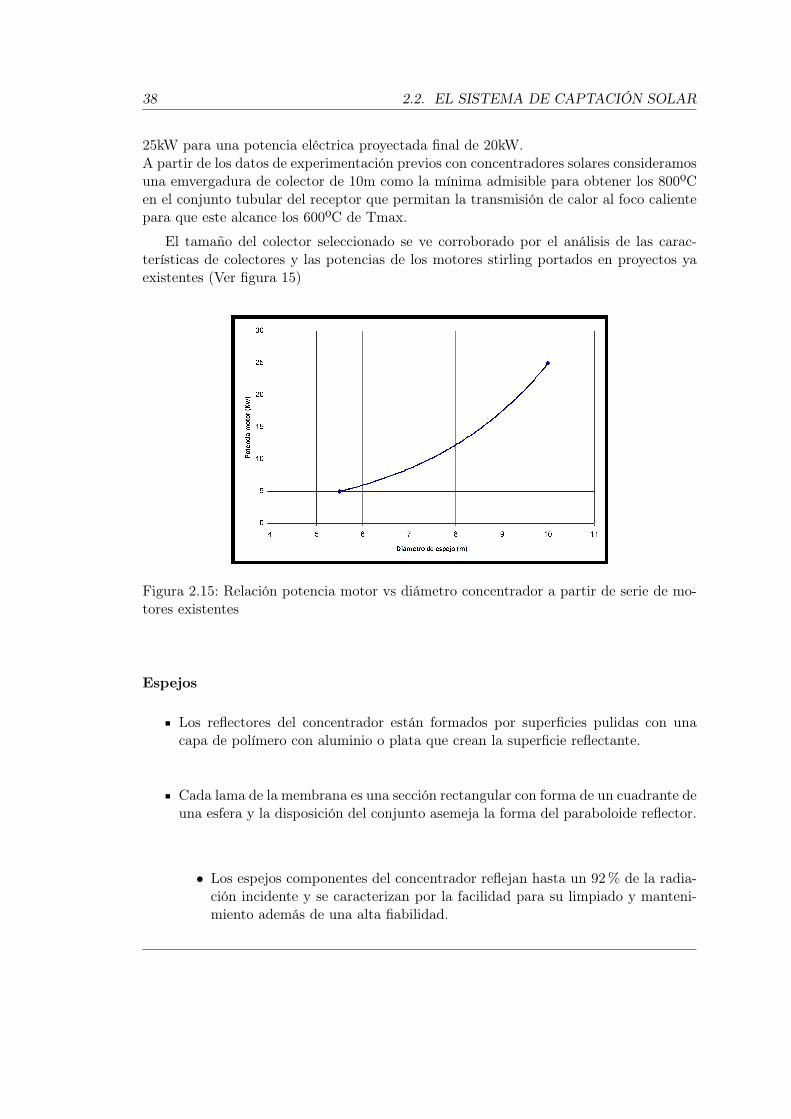
25kW para una potencia eléctrica proyectada final de 20kW.A partir de los datos de experimentación previos con concentradores solares consideramosuna emvergadura de colector de 10m como la mínima admisible para obtener los 800ºCen el conjunto tubular del receptor que permitan la transmisión de calor al foco calientepara que este alcance los 600ºC de Tmax.
El tamaño del colector seleccionado se ve corroborado por el análisis de las carac-terísticas de colectores y las potencias de los motores stirling portados en proyectos yaexistentes (Ver figura 15)
Figura 2.15: Relación potencia motor vs diámetro concentrador a partir de serie de mo-tores existentes
Espejos
Los reflectores del concentrador están formados por superficies pulidas con unacapa de polímero con aluminio o plata que crean la superficie reflectante.
Cada lama de la membrana es una sección rectangular con forma de un cuadrante deuna esfera y la disposición del conjunto asemeja la forma del paraboloide reflector.
• Los espejos componentes del concentrador reflejan hasta un 92% de la radia-ción incidente y se caracterizan por la facilidad para su limpiado y manteni-miento además de una alta fiabilidad.

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 39
Figura 2.16: Superfices reflectantes. Los espejos de la derecha cuentan con capa de alu-minio y plata pudiendo apreciarse la mejor capacidad reflexiva en las imágenes al estartomadas éstas en el mismo día nublado
El concentrador cuenta con 2 motores que permiten su movimiento en azimut yelevación para seguir la orientación del sol a lo largo de la jornada.
• Azimut: el concentrador gira en un plano paralelo al suelo permitiendo larotación derecha-izquierda.
Elevación: el concentrador gira en un plano perpendicalar al plano de la tierrapermitiendo la rotación arriba-abajo.
Generador Solar de Ciclo de Aire

40 2.2. EL SISTEMA DE CAPTACIÓN SOLAR
2.2.2. El receptor térmico
El receptor está diseñado para abosorber el máximo posible de la radiación solar con-centrada por el colector/concentrador y transferir el máximo de energía posible al motorStirling a través de un fluido de transferencia. Para absorber el máximo de esta radiaciónsolar el ideal de receptor es un cuerpo idealmente negro con vistas a evitar al máximo laspérdidas térmicas por radiación provenientes de éste. En cualquier caso es inevitable laexistencia de pérdidas por convección y conducción asociadas a este elemento del sistema.
El receptor se ubica aloja dentro de una cavidad con una apertura para la entra-da de los rayos concentrados por el colector siendo ésta lo suficientemente grande parafranquear el paso a la mayoría de los rayos concentrados y no tanto como para que seproduzcan grandes pérdidas por radiación y convección.
Existen basicamente 2 tipos de receptores de uso habitual en los receptores de con-centradores solares:
Un tipo de receptor consistente en una geometría de tubos directamente iluminadosy a través de los que pasa el fluido de trabajo del motor. El mismo conjunto detubos conforma la superficie del absorbedor.
Receptores que usan una mezcla de sales fundidas de sodio y potasio para la trans-ferencia de calor al cilindro caliente del motor. En este tipo de receptores las salescondensan a una temperatura constante proporcionado una transferencia de caloruniforme en el foco caliente del motor. En este caso la temperatura máxima coin-cide con la temperatura media lo que permite elevar la temperatura del fluido detrabajo considerablemente.
Selección del receptor:
• El receptor directamente iluminado puede dar lugar a altos gradientes detemperatura tanto en las zonas de la apertura como en áreas de la geometríatubular.
• La mayor homogeneridad en la distribución de temperatura y el mayor valorde ésta en el caso de los receptores basados en sales fundidas permite predeciruna mejora de rendimiento del conjunto. Por contra, pese a la posibilidadde mejora de rendimiento térmico el receptor de sales condensadas implicamayores problemas de fiabilidad del conjunto debido
Precauciones:
• El receptor basado en sales fundidas puede tener mayores requisitos de mante-nimiento a lo largo de la vida operativa del sistema por lo que se hará necesariala implantación de protocolos de monitorización del mismo en la fase de ex-plotación del prototipo previa a la producción comercial de los motores.

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 41
Figura 2.17: Frontal de la cobertura del conjunto motor. Los rayos concentrados fran-quean la abertura hasta el receptor térmico
Figura 2.18: Ejemplo de receptor térmico tubular directamente iluminado de la empresaSOLO Stirling
Generador Solar de Ciclo de Aire

42 2.2. EL SISTEMA DE CAPTACIÓN SOLAR
Figura 2.19: Desplazamiento del foco del paraboloide
Pérdidas:
• Además de las pérdidas en el fénómeno de reflexión de los espejos, existenpérdidas del conjunto concentrador debido a la forma del mismo. El concen-trador se asemeja a un paraboloide pero no es un paraboloide ideal por loque se produce de facto un desplazamiento del foco produciéndose fenómenoscomo el desbordamiento de los rayos concentrados bordes afuera del orificiode apertura.
Calor recogido por el receptor
Definimos el calor recogido por el receptor según la siguiente expresión:
Q = AAp · [α · c · Es− ε · σ · T 4A − UL · (TA − Ta)]
donde
AAp es el área de apertura
α es el coeficiente de absorción media del receptor
c es el factor de concentración
Es la densidad de radiación
ε es la emisividad media del receptor respecto a la de un cuerpo negro a la tempe-ratura de absorción
σintroduce la constante de Boltzman

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 43
Figura 2.20: Fenómeno de desbordamiento en un receptor tubular
TA es la temperatura del medio de transferencia
ULes la pérdida de calor por convección y conducción
Taes la temperatura ambiente
Por otro lado se presenta la energía disponible teniendo en cuenta que para la trans-ferencia de calor del absorbedor al fluido de transferencia se require un gradiente detemperatura:
Q = AAb · UI · (TA − TF )]
La combinación de las anteriores expresiones lleva a:
Q = AAp · [F · α · c · Es− F · ε · σ · T 4A − F · UL · (TA − Ta)]
Se define la eficiencia térmica como el ratio entre la energía o calor disponible y laenergía radiante en la apertura del colector:
ηth = F · α−F · ε · σ · T 4
F − F · UL · (TF − Ta)c · Es
Generador Solar de Ciclo de Aire

44 2.2. EL SISTEMA DE CAPTACIÓN SOLAR
Figura 2.21: Espectro de radiación solar
Impresiones
Como primeras conclusiones a los desarrollos precedentes se puede inferir que:
A mayores temperaturas de fluido se alcanzan menores eficiencias
A mayores factores de concentración se alcanzan mayores eficiencias
Las pérdidas por convección y conducción son de menor importancia que los altosfactores de concentración
Por otro lado resulta de vital importancia la elección adecuada de los coeficientes deabsorción media del receptor (α) y de emisividad media del receptor (ε). En teoría apartir de la ecuación de eficiencia los máximos valores de esta se obtendría para α=1,ε = 0 y UL=0. Sin embargo existen ciertas limitaciones impuestas por la Ley de Kirchoffque obliga a que para una determinada longitud de onda los coeficientes de absorción yemisividad sean iguales.
2.2.3. Generador eléctrico
Para la conversión de la potencia mecánica al eje en potencia eléctrica y a partir delanálisis de los proyectos existentes en el mecado, se opta por seleccionar un rango degeneradores tipo de inducción de entre 20kW y 25kW de potencia de salida.

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 45
Figura 2.22: Representación de la eficiencia térmica del receptor en función de tempera-tura de fluido de transferencia y distintos factores de concentración
Este tipo de generadores son fabricados con distintas configuraciones por la empresaKockmus en Suecia y se ha extendido su uso en los distintos demostradores de motorStirling existentes hoy en día.
2.2.4. Conversión del calor en electricidad
El núcleo fundamental del proyecto reside en la conversión de energía radiante solarrecolectada mediate un concentrador solar para su mejor tratamiento, el aprovechamientode ésta energía para mover un motor de ciclo térmico y que este a su vez transmita elmovimiento mecánico a un generador para producir energía eléctrica.
Los principios de la Termodinámica implican que no todo el calor transferido puedaser derivado en trabajo porque parte del mismo se pierde en el punto de menor tempera-tura. El ciclo termodinámico de mayor rendimiento es el ciclo Carnot que se caracterizapor ser un ciclo ideal y reversible compuesto de 2 transformaciones isotermas y dos adia-báticas. El rendimiento del ciclo de carnot es el mayor de los teóricos posibles en un ciclotermodinámico de intercambio de calor y trabajo.
En un ciclo como el de Carnot el máximo rendimiento se consigue para valores máxi-mos de temperatura de calor de entrada mientras que la extracción de calor debería darsea temperaturas próximas a la ambiental. En el caso de la combinación de motores consistemas concentradores solares hay que tener por otro lado que la eficiencia del receptorcae al aumentar la temperatura . De esta forma, en el caso de un hipotético sistema conmáquina de Carnot y concentrador solar, el rendimiento vendría dado por:
Generador Solar de Ciclo de Aire

46 2.2. EL SISTEMA DE CAPTACIÓN SOLAR
Figura 2.23: Generador 25kWe comercial acoplado a Stirling de pistón libre
ηTot = ηC · ηthEn la figura 5 se presenta el rendimiento total en función de la temperatura del
absorbedor y para distintos valores del factor de concentración (C). De la gráfica sedesprende que existe siempre un valor de temperatura para el que se puede conseguir unmáximo rendimiento.
Rango de temperaturas En el presente proyecto de motor Stirling, éste se combinacon un generador-alternador y el sistema concentrador consistente en un espejo para-bólico. La eficiencia del motor aumenta cuanto mayor sea la temperatura máxima detrabajo. Sin embargo existen restricciones al valor de esta temperatura máxima deriva-das de los límites térmicos de las cargas de trabajo que puede soportar el material. Estatemperatura límite tiene un rango habitual que ya viene acotada por proyectos de simi-lar empacho, y de los que ya se tiene experiencia previa, que ya tienen de entre 650ºC y800ºC resultando unos rendimientos de conversión de entre el 30% y el 40%. En el casode nuestro proyecto de motor stirling la temperatura final de trabajo del foco caliente esde 850K (577ºC) por lo que no se sobrepasa el rendimiento.
Rango de presiones Para maximizar la potencia las presiones de trabajo se encuen-tran en un rango entre 50 y 100 bares. El problema de las altas presiones de trabajo esel sellado de juntas, el sellado de fronteras entre zonas de alta presión y aquellas que seencuentran a la presión ambiental son focos de potenciales problemas de fiabilidad delmotor.
En la configuración final del Stirling de Englobe Technologies los rangos de presión sonde 7.8 a 35.8 bares, habiéndose encontrado distintos diseños precedentes en ese rango depresiones. En este caso y tras distintos análisis se ha sacrificado algo la maximización de

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 47
Figura 2.24: Ciclo Carnot
potencia con vistas a conseguir una mayor fiabilidad del motor puesto que los problemascon ésta han sido uno de los mayores handicaps en el desarrollo e implantación de estatecnología frente a otras de generación energética limpia.
2.2.5. Rendimiento del sistema conjunto
En rendimiento final de un conjunto de sistema Stirling de Englobe Technologiesen su diseño final viene determinado por las pérdidas que se dan en cada uno de suscomponentes intermedios. De esta forma existirán pérdidas de:
Pérdidas por reflexión en el colector del sistema.
Pérdidas por fenómenos de interferencia y desbordamiento en la apaertura de accesoal receptor
Pérdidas en la tasa de transferencia de calor en el receptor
Pérdidas en el motor Stirling
Pérdidas en el generador
Los rendimientos en cada uno de los fenómenos quedan reflejados en la siguiente tabla:
Generador Solar de Ciclo de Aire
48 2.2. EL SISTEMA DE CAPTACIÓN SOLAR
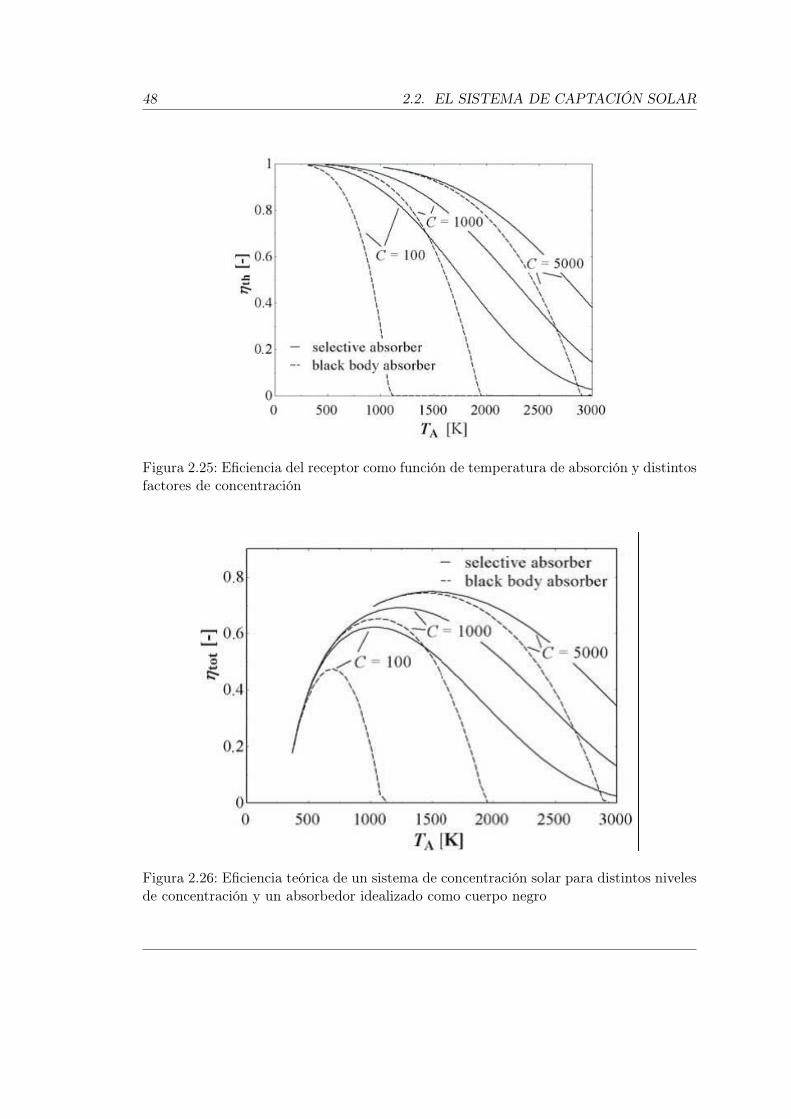
Figura 2.25: Eficiencia del receptor como función de temperatura de absorción y distintosfactores de concentración
Figura 2.26: Eficiencia teórica de un sistema de concentración solar para distintos nivelesde concentración y un absorbedor idealizado como cuerpo negro

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 49
Figura 2.27: Cascada de pérdidas desde potencia disponible hasta la potencia de salidapara una situación de radiación solar de 1000w/ m^2
Fenómeno EficienciaReflexión 0.9
Desbordamiento 0.85Pérdidas receptor 0.7Pérdidas motor 0.6
Pérdidas generador 0.8
El producto de todos los rendimientos es igual a 0.257, siendo éste el rendimiento toaldel sistema.
La aplicación de los rendimientos al análisis del caso en que existe una disponibilidadenergética plena (al menos 1000W/m^2) y teniendo en cuenta que la potencia de par-tida disponible es la de incidencia del sol en el área del colector (80kW) da lugar a losresultados de la figura 26. Donde como cabía esperar, se tiene una potencia de salida deaproximadamente 20kW.
Generador Solar de Ciclo de Aire

50 2.3. SISTEMA DE SEGUIMIENTO
2.3. Sistema de seguimiento
2.3.1. Introducción
El rendimiento de la generación de energía del sistema depende de la cantidad de ra-diación solar incidente sobre el receptor. Aumentar este rendimiento se utiliza un reflectorparabólico con el fin de concentrar sobre el cuerpo del receptor la radiación incidente enun área mayor. Si la orientación del reflector con respecto del sol no es la correcta, laenergia se concentra fuera del receptor y este método resulta ineficaz.
Para esto es necesario averiguar cuál es la orientación correcta en un momento dadoy actuar sobre el sistema para conseguirla. De esto se encargan los subsistemas decisor yactuador, respectivamente.
Figura 2.28: Diagrama de bloques del sistema de seguimiento
Para el diseño del subsistema decisor se ha pensado en minimizar el mantenimientodel sistema, aprovechando la información disponible acerca de la trayectoria del sol enlugar de utilizar un sistema de detección dinámico, que sería más vulnerable a variacio-nes atmosféricas o al deterioro de los sensores expuestos a la intemperie y a la propiaradiación.
El subsistema actuador se basa en dos motores de pasos conectados mecánicamente,a través de bloques reductores, a los ejes sobre los que está montado el reflector. Eldispositivo digital que controla los motores está realimentado con información relativa ala posición de los ejes, consiguiendo asi un sistema actuador de gran precisión a pesar dela variabilidad del viento que pueda ejercer un fuerza sobre la superficie del reflector.
2.3.2. Subsistema decisor
El subsistema decisor es el encargado de averiguar cuál es la orientación que consegui-rá, en cada momento, concentrar la mayor cantidad de radiación solar sobre el elementotérmico del generador.
En este caso se ha optado por obtener esta información a partir de un calendario solaralmacenado en un dispositivo de memoria. Estos datos son relativos a la latitud en la

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 51
que se instala el sistema, de tal forma que se eviten operaciones repetitivas para calcularlos ángulos de elevación y azimut necesarios, reduciendo así el consumo del sistema.
Figura 2.29: Diagrama de bloques del subsistema decisor
La salida de este subsistema contiene la información acerca de los ángulos con los queel subsistema actuador debe orientar el cuerpo del reflector.
Reloj de tiempo real
Este dispositivo se sincroniza con un generador de pulsos basado en un cristal decuarzo. Da información a su salida acerca de la fecha y hora actuales.
Mapeo de memoria
El objetivo del mapeado es obtener la posición de memoria en la que están almace-nados los datos correspondientes a la fecha y hora actuales. Esto se consigue a partir deun circuito digital formado por una combinación de puertas lógicas.
Memoria
En la memoria se almacenan, en formato binario, los ángulos de elevación y azimutdel sol para cada minuto de la vida útil del dispositivo. La cuantificación de estos valoresse realiza a 256 niveles. Por tanto necesitamos un byte para almacenar cada uno de losángulos.
Generador Solar de Ciclo de Aire

52 2.3. SISTEMA DE SEGUIMIENTO
Considerando 25 años de funcionamiento el tamaño de la memoria necesaria es menorde 27 MB.
Para las horas nocturnas, el valor almacenado en celda de memoria correspondientees el de un ángulo que coloque al sistema en una posición neutra.
Registro de posición actual
Los datos proporcionados por la memoria se almacenan en un registro de salida. Esteregistro aísla la salida del sistema de fluctuaciones en la salida del dispositivo de memoria.
Reloj de refresco
Este reloj genera un pulso a cada minuto para actualizar la salida de la memoria enfunción de la dirección que corresponde al momento actual. Tras un pequeño retardo, elvalor almacenado en dicha posición se carga en el registro de posición actual.
Registro y selector de posición neutra
En el registro de posición neutra se almacenan unos valores para los ángulos quecoloquen al sistema en una posición neutra que permita operar de forma segura en casonecesario. Tanto este valor como el de posición actual están presentes a la entrada de unmultiplexor. La selección de la salida, que será la que proporcione finalmente el sistema,se realiza físicamente a través de un interruptor de selección.
2.3.3. Subsistema actuador
El objetivo del subsistema actuador es dar al reflector la orientación que se especificamediante una señal de entrada. Dicha señal contiene información acerca de los ángulosde elevación (θ) y azimut (φ) que, si bien constituyen una base para describir cualquierdirección en un sistema esférico, adquiere en este caso valores contenidos dentro de unrango limitado.
El subsistema contiene dos conjuntos actuadores, uno para el azimut y otro para laelevación, cada uno de los cuales posiciona en el ángulo recibido un eje al que está fijadode manera conveniente el reflector. Estos dos conjuntos son idénticos, salvo por la fijaciónfísica del eje y el grado de libertad que establecen los limitadores.
Los conjuntos actuadores realimentan al controlador de orientación con señales queindican el estado del controlador del motor -parado por un limitador o en funcionamiento-y el ángulo actual en que se encuentra el eje.

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 53
Figura 2.30: Diagrama de bloques del subsistema actuador
Figura 2.31: Actuador para control de elevación
Generador Solar de Ciclo de Aire

54 2.3. SISTEMA DE SEGUIMIENTO
Figura 2.32: Actuador para control de azimut
Controlador de orientación
Es un subsistema digital que coordina el movimiento de cada uno de los motores através de los conjuntos actuadores.
Este bloque recibe las siguientes señales de entrada:
1. La posición que el sistema de decisión ha establecido como óptima.
2. Una señal de realimentación proviniente del encoder que informa al controlador dela orientación actual de su eje, permitiendo decidir sobre la necesidad de mover elmotor en caso de que dicho ángulo se encuente muy alejado del valor deseado.
3. La señal de estado del controlador del motor, para informar al controlador deorientación en caso de que el motor se encuentre parado por haber activado algunode los limitadores.
4. La señal de un pulsador de emergencia detiene inmediatamente el movimiento deambos motores si fuera necesario por razones de seguridad.
El controlador de orientación proporciona dos señales de salida que indican a cada uno delos conjuntos actuadores de la dirección en la que se debe mover su motor. Estas señalespueden adquirir tres valores indicando sentido directo, sentido inverso o motor parado.
Controlador de motor
El controlador de motor recibe una señal indicando si el motor debe moverse y enqué sentido debe hacerlo. En consecuencia, genera una señal de salida adecuada para laentrada de control del motor al que está conectado.

CAPÍTULO 2. ANÁLISIS DE VIABILIDAD OPERACIONAL 55
Recibe, además, una señal de entrada proveniente del conjunto de los limitadores,que provocaría la parada del motor mediante un valor nulo a la salida y propagaría estainformación al controlador de orientación mediante otra señal de salida para realimenta-ción.
Motor y reductoras
Para aplicar un movimiento angular a cada uno de los ejes se utiliza un motor depasos junto a un bloque reductor adecuado a la carga.
Encoder
El eje sobre el que actúa el motor para orientar el reflector, está fijado mecánicamentea un encoder que obtiene el ángulo actual y lo reenvía como señal de alimentación alcontrolador de orientación.
El controlador de orientación decidirá en base a esta información, si es necesarioactuar sobre el motor para alcanzar el ángulo deseado.
Limitadores
Los limitadores son unos interruptores colocados de tal forma que sean activadosmecánicamente cuando el sistema físico se aproxime a las posiciones extremas dentro delespacio en el que se permite su movimiento.
Cuando estos interruptores se cierran, se envía una señal de parada al controladordel motor para cancelar la señal de control de los motores, evitando así causar dañosal sistema debidos al mal funcionamiento de alguno de sus elementos. El controlador demotor enviará a su vez una señal de realimentación al controlador de orientación parainformar de esta circunstancia.
Generador Solar de Ciclo de Aire

56 2.3. SISTEMA DE SEGUIMIENTO

Capítulo 3
Viabilidad operacional. Estudiogeográfico
3.1. Estudio de radiación solar en el territorio español
En el capítulo correspondiente al Análisis de Radiación Solar se ha abordado el me-dio radiante y sus características. En el presente apartado, y tomando como referencialos estudios particularizados para el territorio español por parte de agencias estatalesy grupos de investigación públicos, se acaba proponiendo una ubicación para el primerprototipo demostrador de motor Stirling.
Previamente se presentan los datos de radiación solar en España con carácter estacio-nal y a partir de tandas históricas de datos disponibles del NOAA y el satélite Meteosatcorrespondientes al pepriodo 1998-2002. Estos datos para el estudio de radiación solardel territorio español provienen tanto del Instituto Nacional de Meteorología como delCentro de Investigación de la Unión Europea.
A partir de la observación de un mapa de radiación solar de Europa (Figura 1) ela-borado por el Centro de Investigación de la UE (Comisión Europea) es trivial inferir queEspaña es el país de los 27 que cuenta con mejores condiciones naturales para el aprove-chamiento de recurso energético de radiación solar. Ha sido esta disponibilidad energéticajunto con un desarrollo legislativo acompañado de una política de subvenciones generosarecogidos en el Plan de Energías Renovables 2005-2010 la que llevó a un crecimientoexhuberante del sector solar en España en los últimos años, de tal forma que llegaron adetectarse trazas de comportamientos especulativos.
La energía solar disponible en España es un recurso abundante del orden de 4.000veces la energía consumida anualmente en el país. El aprovechamiento de la misma estácondicionado por 2 factores fundamentales:
La intensidad de la radiación recibida en tierra que depende de los ciclos diarios y
57

58 3.1. ESTUDIO DE RADIACIÓN SOLAR EN EL TERRITORIO ESPAÑOL
Figura 3.1: Mapa europeo de radiación solar (European Comission- Joint Research Cen-tre)
estacionales así como de la localización del lugar de aprovechamiento del recurso(fundamentalemente su latitud)
Las condiciones climatológicas y meteorológicas de la ubicación.
Se hace pues necesario conocer las características de irradiación solar de la ubicacióndonde se van a implantar las explotaciones solares tanto en cantidad como en formas dedistribución de la misma, como los ciclos temporales (diarios y anuales) que la caracte-rizan.
El Instituto Meteorológico Nacional cuenta con centros de medición regionales quecuentan con piranómetros que permiten realizar series de medidas temporales, normal-mente mensuales. Mediante interpolación entre las distintas estaciones de medición, seobtienen los datos para las zonas intermedias y finalmente a partir de los valores medi-dos y aquellos estimados se presentan los mapas mensuales y sus medias anuales para lacaracteización del fenómeno en el territorio nacional.

CAPÍTULO 3. VIABILIDAD OPERACIONAL. ESTUDIO GEOGRÁFICO 59
3.1.1. Datos anuales de radiación solar
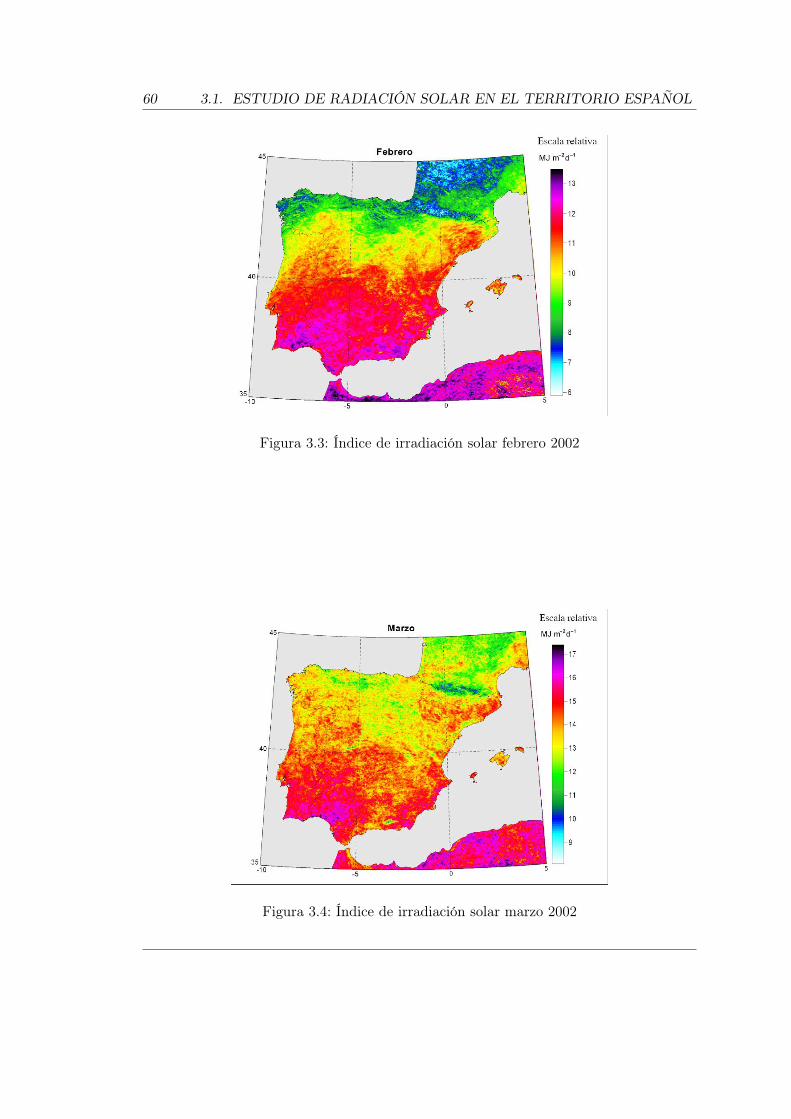
En las figuras (2 a 13) se muestra la irradiación solar media para los datos del NOAAy el satélite Meteosat tomados entre 1998 y 2002. Se presentan los valores de los mapasrelativos a todos los meses de un año medio con vistas a comprobar la evolución y dife-rencias a lo largo del año y en las distintas zonas de la península.
A partir de la observación de los mapas se pueden distinguir varias zonas o rangos deradiación solar con las siguientes características medias anuales.:
Así, la zona de menor densisidad energética es la correspondiente al Norte y laCornisa Cantábrica donde los valores mínimos medios rondan los 11MJ mientrasque en Andalucía y sobre todo entorno a la Cuenca del Guadalquivir los valoresmínimos alcanzan medias de 17.5KJ.
El caso de la franja central desde Extremadura a Valencia pasando por Madridcuenta con valores razonables mínimos de 16MJ.
Otras zona caracteristica sería la de Galicia con una media mínima de alrededor de14MJ y las Baleares con valores entre 14.5MJ y 16MJ.
Como se puede observar a a partir de los mapas medios mensuales existe una fuertecomponente estacional en las medidas tomadas por el satélite, desde los mínimos del mesde enero correspondientes a la cornisa cantábrica de alrededor de 4MJ debido a los altosíndices de nubosidad existentes en la zona hasta los máximos de casi 26MJ en el valledel Guadalquivir en el mes de julio.
Figura 3.2: Índice de irradiación solar enero 2002
Generador Solar de Ciclo de Aire
60 3.1. ESTUDIO DE RADIACIÓN SOLAR EN EL TERRITORIO ESPAÑOL
Figura 3.3: Índice de irradiación solar febrero 2002
Figura 3.4: Índice de irradiación solar marzo 2002

CAPÍTULO 3. VIABILIDAD OPERACIONAL. ESTUDIO GEOGRÁFICO 61
Figura 3.5: Índice de irradiación solar abril 2002
Figura 3.6: Índice de irradiación solar mayo 2002
Generador Solar de Ciclo de Aire

62 3.1. ESTUDIO DE RADIACIÓN SOLAR EN EL TERRITORIO ESPAÑOL
Figura 3.7: Índice de irradiación solar junio 2002
Figura 3.8: Índice de irradiación solar julio 2002

CAPÍTULO 3. VIABILIDAD OPERACIONAL. ESTUDIO GEOGRÁFICO 63
Figura 3.9: Índice de irradiación solar agosto 2002
Figura 3.10: Índice de irradiación solar septiembre 2002
Generador Solar de Ciclo de Aire

64 3.1. ESTUDIO DE RADIACIÓN SOLAR EN EL TERRITORIO ESPAÑOL
Figura 3.11: Índice de irradiación solar octubre 2002
Figura 3.12: Índice de irradiación solar noviembre 2002

CAPÍTULO 3. VIABILIDAD OPERACIONAL. ESTUDIO GEOGRÁFICO 65
Figura 3.13: Índice de irradiación solar diciembre 2002
Se presenta a continuación los valores de irradiación solar media en España para lamedia de años entre 1998 y 2002. De la observación de la gráfica (Figura 14) se puedeconcluir un valor medio de irradiación solar entorno a los 15MJ m^2 d^-1 con variacionesanuales en exceso-defecto de hasta 1 MJ.
Figura 3.14: Variación estacional media de irradiación solar
Se presenta a continuación los valores de irradiación solar media en España. De laobservación de la gráfica (Figura 14) se puede concluir un valor medio de irradiaciónsolar entorno a los 15MJ m^2 d^-1 con variaciones anuales en exceso-defecto de hasta 1
Generador Solar de Ciclo de Aire

66 3.1. ESTUDIO DE RADIACIÓN SOLAR EN EL TERRITORIO ESPAÑOL
MJ.
Figura 3.15: Variación interanual para el periodo de estudio de la media de irradiaciónsolar

CAPÍTULO 3. VIABILIDAD OPERACIONAL. ESTUDIO GEOGRÁFICO 67
3.1.2. Selección de ubicación del prototipo Stirling
En el presente apartado se propone la ubicación para el montaje del prototipo Stirlingde Englobe Technologies a partir de 2010.
Antecedentes
A partir de los datos y mapas de radiación solar de España y durante el desarrollodel proyecto se valoraron 2 posibles ubicaciones.
La óptima desde el punto de vista energético en Andalucía.
Una ubicación en Madrid de disponibilidad energética algo menor pero que conlle-vaba menores dificultades desde el punto de vista logístico para la empresa.
La selección de la zona de pruebas del prototipo finalmente se decantó por la primeraopción, concretamente en la provincia de Córdoba.
Durante el año 2009 la empresa Magtel Renovables se interesó en el diseño de motorStirling en desarrollo por parte de Englobe Technologies mostrando su disposición a fi-nanciar la construcción del motor una vez finalizados los trabajos de ingeniería.Magtel Renovables cuenta con varios campos solares de energía fotovoltaica en distintasubicaciones de Andalucía perteneciendo asimismo a la Asociación Española de la Indus-tria Termosolar.
La ubicación del prototipo de Stirling se localizará en los terrenos de la planta so-lar La Castillaneja en La Carlota (Córdoba) donde Magtel Renovables cuenta con unaexplotación de 60.000 placas solares y una potencia instalada de 9.8 Mw. La ubicaciónseleccionada para el montaje y monitorización del proyecto de motor Stirling desarrolladopor Englobe Technologies se localiza en Córdoba.
Figura 3.16: Planta Solar de La Castillaneja - Magtel Renovables
Generador Solar de Ciclo de Aire

68 3.1. ESTUDIO DE RADIACIÓN SOLAR EN EL TERRITORIO ESPAÑOL
Justificación de la ubicación
Desde el punto de vista energético, la localización es idónea. La cuenca del Guadal-quivir es una de las zonas de mayor densidad energética solar del territorio español.
• Características de la ubicación:
◦ 2.858 horas de sol / año
◦ 1.690 kWh por m2 / año
Desde el punto de vista de la infraestructura, la incardinación del prototipo en uncentro de aprovechamiento solar cuenta con varias ventajas:
• Presencia de servidumbres asociadas
• Personal especializado para la monitorización del prototipo
• Acceso a subestaciones para las pruebas de inyección a red
• etc.

CAPÍTULO 3. VIABILIDAD OPERACIONAL. ESTUDIO GEOGRÁFICO 69
3.2. Análisis de viabilidad operacional del proyecto en con-guración solar
A partir de la experiencia en otros países con una mejor densidad energética dis-ponible que España resulta inmediato inferir que en nuestro país la implantación de latecnología Stirling para aprovechamiento de la fuente solar a partir de máquinas con unosrazonables ratios de eficiencia energética ha de ser viable.
Se impone sin embargo evaluar y estimar la eficiencia del dispositivo completo, análisiseconómico de la instalación, etc.
3.2.1. Estimación de Generación y Potencia eléctrica
Se han llevado a cabo diversos estudios para la estimación y cálculo de potencia eéc-trica de salida de motores Stirling en configuración alfa como es nuestro caso a partir desimplificaciones y valores de radiación solar por metro cuadrado en la zona de ubicación.
De esta forma, una expresión comunmente extendida a partir de los trabajos deNepveu (2009) viene dada por:
P = −4.341 · 10E-8 · IRS3 + 8.46 · 10E-5 · IRS2 − 1.956 · 10E-3 · IRS + 1.2873
El valor de rendimiento global del motor depende de la potencia de salida y del valordel momento de irradiación solar (IRS) algo intuitivo y que certifica la variabilidad deéste en función del momento temporal y las condiciones ambientales de la ubicación. Laexpresión para la eficiencia viene dada por:
η =P
Ac · IRS
Donde Ac es es área del concentrador parabólico que en nuestro caso es de 78.54m^2.A partir de los datos y teniendo en cuenta que el motor Stirling está diseñado para un
punto óptimo de funcionamiento entorno a los 1000 w/m^2 de radiación solar, obtenemosuna gráfica de funcionamiento en funcionamiento de estos valores.
3.2.2. Análisis
A partir de los datos del potencial energético existente en la zona de trabajo así comode las estimaciones de producción en función de datos embientales, se puede inferir queel proyecto es potencialmente viable partiendo de la base de que los costes de producciónde los motores son aceptables.
Se presentan los datos relativos a la configuración Stirling
Generador Solar de Ciclo de Aire

703.2. ANÁLISIS DE VIABILIDAD OPERACIONAL DEL PROYECTO EN
CONGURACIÓN SOLAR
Figura 3.17: Curva de funcionamiento del motor en función de radiación solar
Características Stirling Englobe ValoresConcentrador solar
Tipo Segmentado de fibra de vidrioSegmentos 12
Superficie reflectante Capa de espejo de 0.8 mmDiámetro 10
Área 78.54 m^2Reflectividad 0.95
Factor de concentración (pico) 9400ReceptorTipo Tubos directamente iluminados
Diámetro de apertura 0.24 mTemperatura del receptor (pico) 850K
Motor StirlingTipo Alfa
Cilindros 2Cilindrada 1000 cc
Fluido de trabajo HidrógenoRPM 3000
Refrigeración AguaSistema Completo Stirling
Potencia Máxima 20 kWValor mínimo de irradiación 250 W/m^2
Generador Inducción
Para realizar el análisis de viabilidad operacional se hace necesario contar con unaestimación de la energía producida por el sistema motor. A partir de la integración de

CAPÍTULO 3. VIABILIDAD OPERACIONAL. ESTUDIO GEOGRÁFICO 71
Figura 3.18: Potencia disponible por el colector para distintos radios de apertura
valores anteriores y teniendo en cuenta los valores de potencia asociada según el índicede radiación, se presentan los valores de potencia generada de carácter estacional.
3.2.3. Análisis de Costes
Existen distintas formas de plantear un análisis de costes y viabilidad operacional delsistema motor Stirling de Englobe Technologies.
Para tener datos de potencia disponible inicialmente se utiliza el código CIRCE2desarrollado en los laboratorios Sandia de EEUU y que permite calcular la potenciarecibida por el colector solar de disco parabólico. Los datos obtenidos para distintosradios aparecen en la Figura 18, a partir de estos datos se decide optar por un diámetrode apertura del colector de 20 cm.
Con el mismo código CIRCE2 se obtienen datos de configuración del flujo en eldiámetro de abertura del conjunto tubular del absorbedor del colector solar (Ver Figura19)
A partir de los datos anteriores y teniendo en cuenta la predicción de resultados deextracción de potencia en función del índice de radiación solar (Figura 17)
Se calcula la cantidad de energía disponible por radiación solar y la potencia desalida estimada para el conjunto Stirling haciendo una aproximación lineal de la segunda
Generador Solar de Ciclo de Aire

723.2. ANÁLISIS DE VIABILIDAD OPERACIONAL DEL PROYECTO EN
CONGURACIÓN SOLAR
Figura 3.19: Distribución de flujo en apertura del colector
a modo de simplificación de los cálculos posteriores (Ver Figura 20)Para la obtención de la cantidad de radiación solar disponible a lo largo del año se
ha utilizado el programa HOMER de los Sandia National Laboratories. (Ver Figura 21en adelante)
Potencia generada
Se presenta en la Figura 25 la predicción de potencia generada con carácter mensualpara el prototipo de Motor Stirling de Englobe Technologies.
El total de potencia anual teórica generada es de 34184 kWh para cada sistemaStirling.
En el caso de una planta de 50MW la potencia anual teórica generada sería de85460 MWh.
Datos para el cálculo de viabilidad del proyecto
El coste de fabricación de un prototipo se estima en 35000 € con el desglose de costesy partidas que ya se ha mencionado en apartados anteriores sin embargo en la versióncomercial y en estado de producción en serie de las unidades, el coste por unidad noexcederá de los 20000€.

CAPÍTULO 3. VIABILIDAD OPERACIONAL. ESTUDIO GEOGRÁFICO 73
Figura 3.20: Análisis de pérdidas del sistema: Potencia disponible en ubicación (kW) vsPotencia de salida (kW) en función del índice de radiación solar
Coste de fabricación e instalación de la unidad: 25000€
Tasa de descuento anual: 8%
Costes estimados de mantenimiento: 3% anual
Tasa de funcionamiento anual: 98%
Vida estimada del sistema: 25 años
Precio de venta del Kw: 0.080€/kW
Estudio de viabilidad del proyecto
La determinación de del potencial eléctrico del proyecto se realiza a través del cálculoy comparación del Coste de Electrificación Equivalente o LEC (levelized electric cost),es decir, el coste del kWh producido por los sistemas considerados y para cada unidadde estudio.
En nuestro caso partimos de los siguientes supuestos:
No existe coste de apertura de montaje de planta a excepción de los propios discos.
No existe coste de arrendamiento de las tierras ocupadas.1
1La razón para la ausencia de estos costes es que la planta proyectada se ubicará en los terrenos queMagtel Renovables posee y en donde está instalada actualmente la planta fotovoltaica de La Carlota
Generador Solar de Ciclo de Aire
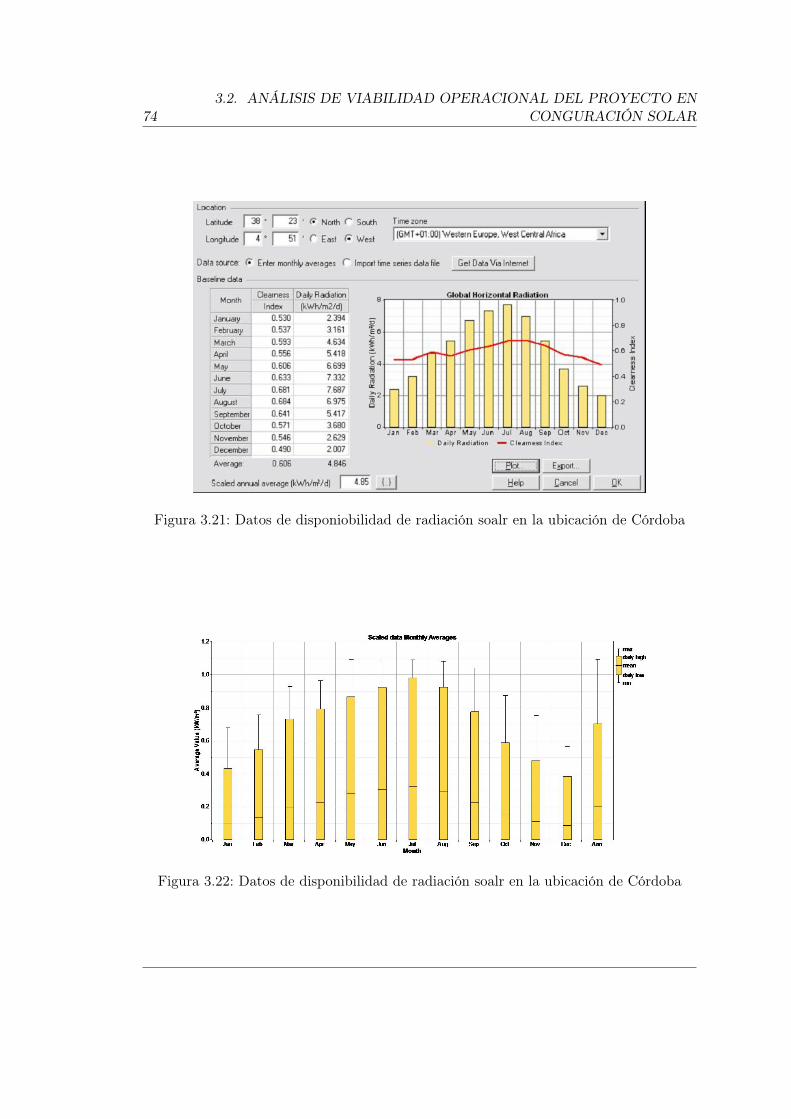
743.2. ANÁLISIS DE VIABILIDAD OPERACIONAL DEL PROYECTO EN
CONGURACIÓN SOLAR
Figura 3.21: Datos de disponiobilidad de radiación soalr en la ubicación de Córdoba
Figura 3.22: Datos de disponibilidad de radiación soalr en la ubicación de Córdoba

CAPÍTULO 3. VIABILIDAD OPERACIONAL. ESTUDIO GEOGRÁFICO 75
Figura 3.23: Datos de disponibilidad de radiación soalr en la ubicación de Córdoba
Figura 3.24: Datos de disponibilidad de radiación soalr en la ubicación de Córdoba
Generador Solar de Ciclo de Aire

763.2. ANÁLISIS DE VIABILIDAD OPERACIONAL DEL PROYECTO EN
CONGURACIÓN SOLAR
Figura 3.25: Generación eléctrica mensual
Coste de Electrificación Equivalente (LEC)
En primer lugar procedemos al cálculo del cálculo del Coste de Electrificación Equi-valente (LEC)
LEC =crf · Cinv + Cop/man − Cmed·
Pprod
donde
crf = kd·Cinv(kd+1)N
(kd+1)N−1es el factor de recuperación del capital que tiene un valor de 6
para los valores del proyecto.
Cop/manson los costes de operación y mantenimiento estimados en un 3% del costede inversión
Cinves el coste de inversión en la planta calculado considerando los costes de pro-ducción de cada sistema Stirling de serie
Cmedes el coste medioambiental
Kdes la tasa anual de descuento que hemos considerado del 5%
Pprodes la potencia producida por la suma de los 2500 motores Stirling
Pventa es el precio de venta de la energía generada que se fija en 0.08€/kWh
Para los datos anteriores obtenemos obtenemos un valor del Coste de ElectrificaciónEquivalente (LEC) de nuestro proyecto es de 0.065€/ kWh ó 65.82€/MWh

CAPÍTULO 3. VIABILIDAD OPERACIONAL. ESTUDIO GEOGRÁFICO 77
Análisis de resultados LEC
Si comparamos nuestro valor de LEC con otros proyectos Stirling existentes, obser-vamos una mejora sensible en el valor del coste de electrificación. Así, en uno de losproyectos Dish Stirling existentes del que se disponen una mayor cantidad de informa-ción, el ECOSTAR, éstos presentan unos valores estimados para un estado maduro desu tecnología de 88€/Mw, encontrándose algunos otros proyectos que aún no han sidorealizados con previsiones de coste de hasta 70€.
Valor Actualizado Neto (NEV)
A continuación calculamos el Valor Actualizado Neto para la planta de 50MW a lolargo de los 25 años de vida que se estima tienen los motores Stirling considerando éstauna hipótesis razonable puesto en proyectos similares es común la proyección a 30 años.. Las hipótesis comunes al cálculo del LEC se repiten.
NPV =∑
(Pprod · Pventa − Cop/man) · (1−(1+i)−N
i )− CC
donde
Pprodes la potencia producida por la suma de los 2500 motores Stirling
Pventa es el precio de venta de la energía generada que se fija en 0.08€/kWh
Cop/manson los costes de operación y mantenimiento estimados en un 3% del costede inversión
CC es el coste de capital
Se presenta la gráfica de valores de NEV para la planta de La Carlota de 50MW depotencia instalada y una inversión incial de 60M€.
Análisis de resultados NEV
A partir del estudio de la gráfica y considerando el tiempo de explotación de lagranja. A partir del año 7 el proyecto es viable economicamente, teniendo en cuenta quela explotación de los sistemas es de 25 años, se confirma la viabilidad del proyecto.
Generador Solar de Ciclo de Aire

783.2. ANÁLISIS DE VIABILIDAD OPERACIONAL DEL PROYECTO EN
CONGURACIÓN SOLAR
Figura 3.26: Valores NEV. Instalación 50 MW (2500 motores)

Capítulo 4
Capacidad de integración dentro dela red eléctrica
4.1. Definición de tipo de instalación. Generación en grid vsGeneración distribuida
El conjunto Stirling de Englobe Technologies puede aplicarse tanto a la 1) generaciónde energía eléctrica de forma masiva para la inyección en red conformando una plantatérmica mediante la acumulación masiva de generadores como para la 2) generación dis-tribuida.
Los elementos que conforman el sistema hasta la inyección a red son los siguientes:
Energía primaria: calorífica / solar recogida por el colector solar.
Conversión primaria: de energía calorífica a mecánica mediante el propio motorStirling
Generación: mediante un generador asíncrono que transforma la potencia mecánicaal eje del motor en energía eléctrica
Interfaz: de conexión entre el conjunto y la inyección a red, consistente en una seriede elementos y servidumbres que se aboradarán en el presente capítulo.
Figura 4.1: Esquema de generación
79

804.1. DEFINICIÓN DE TIPO DE INSTALACIÓN. GENERACIÓN EN GRID VS
GENERACIÓN DISTRIBUIDA
Englobe Technologies entiende que aa potencia del motor stirling objeto del presenteproyecto,se adecúa a las nuevas tendencias de generación distribuida frente a una im-plantación de una gran densidad de ellos en una sola localización. En cualquier caso,existen las 2 posibilidades de utilización:
Granja /Central térmica solar Stirling
Generación distribuida / Cogeneración
El conjunto motor Stirling por su tamño puede estar indicado tanto como sistema demicrogeneración para usuarios independientes de la red como acoplado en forma de clústera otros generadores y conformando una granja o central eléctrica que aporte energía a lared general.
4.1.1. Granja /Central térmica solar Stirling (Magtel Renovables /Englobe Technologies)
Existen en la actualidad varios proyectos, fundamentalmente en el sur de EEUU deplantas Stirling con potencias instaladas del orden de decenas de MW. En San Diegoexiste una planta en desarrollo de 900 MW con 36.000 sistemas Stirling en configuraciónsolar.
Figura 4.2: Representación de planta solar térmica Stirling
En el caso del proyecto Stirling de Englobe Technologies y para una potencia degeneración de 20Kw, se estima que una pequeña planta adecuada para inyectar en la redgeneral tendría las siguientes características:
Potencia total instalada: 50 MW
Número de sistemas Stirling (Englobe Technologies): 2500

CAPÍTULO 4. CAPACIDAD DE INTEGRACIÓN DENTRO DE LA REDELÉCTRICA 81
Espacio dedicado a cada generador: 180 m^2
Área de las instalaciones: 45 hectáreas.
La razón para el dimensionado de hasta 50 MW viene dada por la decisión de no acudiral mercado mayorista de distribución lo que resulta obligatorio para una potencia mayorque generación. Asimismo según el mercado regulatorio para menos de 50MW podriano considerarse como una planta en el esquema tradicional de producción y flujos deconsumo sino como un productor dentro de la generación distribuida
En el caso que nos ocupa la entidad promotora, en este caso Magtel Renovables1 queestá intersada en promover el diseño del parque subcontratando a Englobe Technologiespuede presentar la oferta de suministro como unidad independiente o a través de unagente comercial. Estas ofertas han de realizarse por cada periodo de programación ypor la energía excedente suministrada participando en las mismas condiciones que otrosproductores en régimen ordinario.
Figura 4.3: Esquema de flujos de consumo para una planta Stirling en red tradicional(G)
1Consultar el capítulo correspondiente al Análisis de Viabilidad Operacional y Estudio Geográficopara tener más detalles de la ubicación de la planta
Generador Solar de Ciclo de Aire

824.1. DEFINICIÓN DE TIPO DE INSTALACIÓN. GENERACIÓN EN GRID VS
GENERACIÓN DISTRIBUIDA
En la figura 3 se presenta el esquema de suministro a la red general de distribucióneléctrica.de la granja stirling de 50MW que pretende promover la empresa MAGTELRENOVABLES junto con ENGLOBE TECHNOLOGIES en La Carlota (Córdoba)

CAPÍTULO 4. CAPACIDAD DE INTEGRACIÓN DENTRO DE LA REDELÉCTRICA 83
4.1.2. Esquema de Generación Distribuida / Microgeneración
Figura 4.4: Esquema de la red de distribución en el futuro
En este apartado se presenta la propuesta de esquema de generación distribuida apartir de minigranjas o sistemas modulares stirling de pequeño o mediano tamaño.
Introducción a la Generación Distribuida / Microgeneración. Ventajas y Des-ventajas
Este tipo de generación denominada “Generación Distribuida (GD)” se define comoel uso estratégico de unidades modulares de generación eléctrica, instaladas en formaaislada para proporcionar un servicio específico, o interconectadas a las redes de distri-bución de electricidad en la cercanía de los consumos, para reducir el costo del servicioy mejorar la calidad de la energía entregada.
Por otro lado, los niveles de emisiones de contaminantes del aire—incluyendo dióxi-do de carbono—de las nuevas tecnologías son del 70 a 100 por ciento menores a las desistemas convencionales, en parte porque son alimentadas a partir de fuentes energéticasmenos contaminantes o no contaminantes y en parte porque son más eficientes frente alas instalaciones antiguas de caracter general
Igualmente, como son instaladas donde se requiere la potencia, el calor de desechode los microgeneradores puede ser aprovechado, llevando a eficiencias energéticas quepueden alcanzar el 80% frente al 30% del que tienen las plantas típicas de los sistemascentralizados.
Generador Solar de Ciclo de Aire

844.1. DEFINICIÓN DE TIPO DE INSTALACIÓN. GENERACIÓN EN GRID VS
GENERACIÓN DISTRIBUIDA
Ventajas
Se presenta un resumen de las ventajas de la utilización de este tipo de generacionque también podríamos denominar de fin de línea.
Modularidad: los sistemas basados en microgeneración pueden ser ajustados adi-cionando o quitando unidades, de manera que se emparejen con la demanda.
Tiempos cortos de instalación: los sistemas pequeños pueden ser instalados en pla-zos más cortos que las plantas grandes, evitando que la capacidad supere a la de-manda (al concluir la obra) y los costos de inversiones que tardan años en producirsu primer kWh.
Diversidad de combustibles y volatilidad de precios reducida: puede estar basadaen una variedad amplia de recursos energéticos y reducir la exposición a tener unasola fuente de energía en una planta mayor.
Confiabilidad y resiliencia: un número grande de pequeñas plantas tiene menosprobabilidades que fallar simultáneamente, tienen períodos de salida más cortos,son más fáciles de reparar, y están mejor distribuidas en la geografía.
Se evita la construcción y las pérdidas de plantas de generación y de las redes detransmisión y distribución.
Control local y de la comunidad: la energía distribuida permite usar energéticosdisponibles localmente y empujar el desarrollo económico local.
Emisiones e impactos ambientales reducidos.
Desventajas
Sin embargo, se han identificado algunos inconvenientes a superar en las experienciasque se han llevado a cabo en proyectos de generación distribuida
Inversión inicial: los costes iniciales más altos de estas instalaciones implican mayorfinanciación.
Déficit de inventivos: el usuario no es recompensado por reducir la demanda pico.
No se reconocen beneficios a la red pudiendo derivarse ciertos problemas en la redde distribución
• Nivel de tensión en la red: debido al diseño unidireccional de la red de distri-bución tradicional en ésta la tensión se reduce con la distancia al generadoro transformador. Esta caída de voltaje es predecible y tenida en cuenta enel diseño de la red por lo que la tensión siempre está dentro de unos márge-nes de tolerancia. Al conectar a la red una fuente de generación distribuidaque alimenta una carga de fin de línea se puede producir un flujo y reflujo

CAPÍTULO 4. CAPACIDAD DE INTEGRACIÓN DENTRO DE LA REDELÉCTRICA 85
Figura 4.5: Representación de variaciones de tensión por la variabilidad estacional en lacapacidad de generación
dependiendo de las condiciones de generación y consumo que aportan unaimprevisibilidad respecto a las subidas de tensión. (Ver Imágenes 5 y 6)
• Nivel de armónicos en la red: los generadores rotativos como es el caso delmotor stirling conllevan en ocasiones riesgos de introducción de
.
Generación Distribuida en la UE. Políticas, Objetivos y Resultados.
En la actualidad existen planes específicos dentro de la UE para alcanzar compro-misos de porcentajes de generación de hasta el 20% de generación a través de energíasrenovables en el año 2020. Estas políticas tienen múltiples objetivos:
El desarrollo sostenible, la lucha contra el cambio climático y la reducción de lapolución del aire a través de la generación a través de fuentes renovables y de unplanteamiento de generación en esquema distributivo o de fin de línea son com-promisos que tienen sus bases en la UE en Kyoto y que se han visto prorrogadosaunque de una forma sensible en Coppenaghe al final de 2009.
Generador Solar de Ciclo de Aire

864.1. DEFINICIÓN DE TIPO DE INSTALACIÓN. GENERACIÓN EN GRID VS
GENERACIÓN DISTRIBUIDA
Figura 4.6: Grupo de Stirling de microgeneración
La política de seguridad de la UE también sugiere confluir con las iniciativas yaapuntadas con vistas a reducir la excesiva dependencia del exterior. Si no se hu-bieran empezado a tomar medidas en este sentido, la tendencia que seguí la UE acomienzos del siglo XXI implicaba pasar en 20 o 30 años a depender en un 70% delos suministros externos.
La liberalización del mercado energético común (UE) tal y como se pretende ha deprovocar por sí misma un cambio radical en los modos de producción, distribucióny suministro de energía fomentando la microgeneración por encima de los esquemastradicionales.
El desarrollo y mejora de soluciones y sistemas de generación basados en ener-gías renovables así como los inminentes cambios en los esquemas de distribucióngenerarán mejoras desde el punto de vista de la competitividad de las empresas eu-ropeas, abrirán nuevos mercados y crearán oportunidades de negocio para pequeñasy medianas empresas (como es el que caso de ENGLOBE TECHNOLOGIES y elproyecto que nos ocupa)
Sectores en recesión pueden verse beneficiados del desarrollo de las energías reno-vables como por ejemplo, el sector agrícola orientando parte de su producción a lacosecha de combustibles para centrales térmicas de biomasa.
Por último, cabe recalcar algunas de las ventajas antes expuestas: la generaciónlocal reduce las pérdidas de la red en la transmisión , ayuda a evitar la saturaciónde áreas del grid ya congestionadas y mejora la eficiencia energetica habilitandola posibilidad de aprovechar fuentes térmicas derivadas de la generación desde laperspectiva local.

CAPÍTULO 4. CAPACIDAD DE INTEGRACIÓN DENTRO DE LA REDELÉCTRICA 87
Figura 4.7: Objetivos de generación de renvable de la UE (2010)
Esquema de generación distribuida. Sistema Stirling
Se presenta un esquema (Figura 8) de distintos modos de generación distribuida apartir de configuraciones más o menos densas de sistemas Stirling de Englobe Technolo-gies de 20kW.
Generador Solar de Ciclo de Aire

884.1. DEFINICIÓN DE TIPO DE INSTALACIÓN. GENERACIÓN EN GRID VS
GENERACIÓN DISTRIBUIDA
Figura 4.8: Esquema de flujos de consumo para una planta Stirling (< 50 MW) aportandosegún red distribuida (GD)
Figura 4.9: Ejemplo de módulo Stirling (Equivalente en diseño Englobe a 60kW)

CAPÍTULO 4. CAPACIDAD DE INTEGRACIÓN DENTRO DE LA REDELÉCTRICA 89
4.2. Requisitos y servidumbres para la inyección a red
El conjunto de generación Stirling ha de ir acompañado de una serie de elementos yservidumbres de cara a la inyección en red de la electricidad generada.
4.2.1. Servidumbres del sistema de generación
El sistema de generación que está conectado a la red general ha de contar con unaserie de medidas de protección que proporcionen seguridad al propio sistema de distribu-ción, a los trabajadores, a otros suministradores de la red asi como a los usarios públicosde la misma. Así, los medios de protección asegurarán que un fallo en el suministro delsistema de generación distribuidad hará que ésta sea interrumpida con carácter inmedia-to.Se garantizará asimismo que el sistema de generación distribuida tras un fallo quedarádesconectado hasta después de la reconexión automática del sistema de distribución ge-neral. De la misma manera será necesario el aislamiento e imposibilidad de conexión delsistema de generación distribuida en el caso de que exista una falta de sincronismo conla red.Se hace pues garante al proveedor de microgeneración de la seguridad de la red gene-ral ante posibles anomalías causadas por su sistema de generación, en nuestro caso delsistema de generadores stirling.
Requisitos y Servidumbres de interconexión a red:
En el caso de la disposición del sistema de
Regulación de Voltaje: la fuente distribuida no debe regular la tensión en el puntode interconexión, ni debe causar un apartamiento del valor de la tensión de la redinadmisible según normativas de la región.
Sistema de aterramiento: el sistema de aterramiento de la interconexión de la fuentedistribuida no debe generar sobretensiones no admisibles en los equipos instaladosde la red, ni debe producir la descoordinación de las protecciones del Distribuidorfrente a defectos a tierra en la red.
Sincronismo: la unidad generadora debe permanecer en paralelo con la red, sincausar fluctuaciones de la tensión en el punto de conexión mayores a ±5% del nivelde tensión, y cumplir la normativa regional sobre flicker.
Energización de la red: la fuente distribuida no debe energizar la red eléctrica,cuando ésta se encuentra desenergizada.
Monitorización: en el caso de que el conjunto de generación Stirling sea de más de250 kVA, las interconexiones a la red deben ser monitoreadas, potencia aparentereal de salida, potencia reactiva y voltaje.
Generador Solar de Ciclo de Aire

90 4.2. REQUISITOS Y SERVIDUMBRES PARA LA INYECCIÓN A RED
Elemento de maniobra: para la operación de la red de distribución, debe existir enla interconexión un elemento de maniobra fácilmente accesible, con posibilidad debloqueo, y de corte visible. Debiendo soportar una diferencia de tensión de 220%del valor nominal de la interconexión.
Funcionamiento en isla: en caso de formación de una isla no intencional , en lacual el sistema energiza una parte aislada de la red de distribución, el sistema deinterconexión debe detectar la isla y desenergizar el área antes a los 2 segundos deconformarse la isla.
A continuación se enumeran los principales elementos que acompañan al sistema Stirlingy facilitan la conexión a la red general de distrubución:
Interruptores diferenciales del equipo: Estos interruptores se encontrarán de ladodel generador en el enganche de interconexión y serán capaces de interrumpir lacorriente.
Figura 4.10: Sistema de interrupción con relés de protección
Desconexión manual: El sistema incluirá un sistema de desconexión manua, noautomática como en el anterior elemento, que abra todos los polos que no estén co-nectados a tierra. Cumplirá con las normas y estándares del Ministerio de Industria,ANSI y la IEEE.

CAPÍTULO 4. CAPACIDAD DE INTEGRACIÓN DENTRO DE LA REDELÉCTRICA 91
Figura 4.11: Sistema de desconexión manual
Tomas de tierra: Se proyectarán tomas de tierra adecuadas en los tramos de inter-conexión del sistema de generación a la red de distribución general.
Sistema de medida y monitorización: sistema para el monitoreo de los parámetrosdel sistema..
Figura 4.12: Sistema de medición de energía generada
4.2.2. Funcionamiento genérico de un modulo de microgeneración degeneradores stirling
La tendencia general es el uso de generadores de inducción con rotor en jaula deardilla, por su sencillez, ausencia de contacto giratorio, robustez, bajo coste, bajo mante-nimiento y sencillez de enganche a la red, con velocidades diferentes a la de sincronismo.Las bobinas del estator requieren alimentación y consumen potencia reactiva. Cuandoestán conectados a la red, el régimen de giro es próximo al de sincronismo por lo que el
Generador Solar de Ciclo de Aire

92 4.2. REQUISITOS Y SERVIDUMBRES PARA LA INYECCIÓN A RED
Figura 4.13: Esquema de elementos de conexión del Stirling a red de distribución

CAPÍTULO 4. CAPACIDAD DE INTEGRACIÓN DENTRO DE LA REDELÉCTRICA 93
motor ha de operar a régimen casi constante. En cualquier caso es necesaria .
El sistema Stirling en su disposición de fín de línea y suponiendo que se encuentraaislado del sistema de distribución principal se puede encontrar en distinas situaciones de-pendiendo de su capacidad de generación y de la carga de trabajo además de la exsitenciade baterías de compensación reactiva. Se presentan pues, distintos escenarios:
Escenario I: Carga local mayor que la potencia que puede suministrar el esquemaStirling. En este caso, si la carga local es muy superior a la potencia nominal delos generadores la tensión disminuye rápidamente, con la consecuente disminucióndel par eléctricos de los generadores de inducción, sin embargo, el par mecánicotodavía está actuando en el rotor de las turbinas y por tanto el rotor se acelera.En este contexto los generadores han de ser desconectados por sus protecciones demínima tensión, o por sus protecciones de máxima velocidad.
Escenario II: Carga local menor que la potencia que puede suministrar el esquemaStirling. En esta situación, si la carga local es mucho más pequeña que la potencianominal de los generadores, éstos intentan acelerar, pero como la potencia reacti-va de estos generadores esta totalmente compensada, hay un sobrante de energíareactiva en el sistema aislado que hace que la tensión aumente y por tanto el pareléctrico. Al aumentar el par eléctrico, los generadores de la inducción (cuyo parmecánico permanece constante) tienden a frenarse. En esta situación, los genera-dores de inducción serán desconectados por las protecciones de máxima tensión opor las protecciones de flujo inverso de potencia (que evitan que los generadores deinducción trabajen como motores)
Generador Solar de Ciclo de Aire

94 4.2. REQUISITOS Y SERVIDUMBRES PARA LA INYECCIÓN A RED

Capítulo 5
Especificaciones y Características
5.1. Especificaciones
El proyecto de Generador Solar de un Motor de Ciclo de Aire (Stirling) de EnglobeTechnologies nació a partir de una idea de diseño mecánico de un motor Stirling sin bulón.
Como punto de partida del desarrollo se fijaron una serie de características del mis-mo a la vez que se establecieron unas variables de diseño como punto de partida quese han ido refinando hasta alcanzar el diseño final. Entre las características fijadas delmotor a principios del desarrollo se encuentran:
Motor Stirling
Tipo alfa
Bicilíndrico
Diseño sin bulón
Cilindrada: 500cc - 1000cc
Configuración solar / Plato de espejos parabólico
Rango inicial de temperaturas de trabajo: 300K-1000K
Rango inicial de presiones de trabajo: 5 atm - 100 atm
Una vez explicitados tanto el diseño de partida como variables y rangos límite de lasmismas, se desarrollan los trabajos a lo largo del proyecto con vistas a alcanzar unaconfiguración final. Para alcanzar ese estado de congelación del proyecto, se han sometidoa prueba multitud de posibles configuraciones que han dado lugar a un rediseño constantedel sistema hasta llegar a la propuesta final.
95

96 5.1. ESPECIFICACIONES
Figura 5.1: Diseño inicial del motor (Primavera 2009)
Para alcanzar el diseño final se han abordado diversas líneas de trabajo:
Modelización del motor
Análisis paramétrico de la mecánica del motor
Análisis paramétrico de la termodinámica y fluidodinámica del motor
Simulación del regenerador y variantes del mismo
etc
Asimismo, además del motor se han abordado las servidumbres asociadas al mismo lle-vando a cabo estudios para definir las características óptimas de las mismas tanto desdeel punto de vista del rendimiento del conjunto del sistema como desde el puntos de vistade producción y explotación industrial.
De esta forma, se llega al final del desarrollo a un sistema conjunto con las siguientescaracterísticas:

CAPÍTULO 5. ESPECIFICACIONES Y CARACTERÍSTICAS 97
5.2. Características del Sistema
5.2.1. Características del sistema motor
Producto Generador de Ciclo de Aire ENGLOBE TECHNOLOGIESEstado Diseño preliminar (2009) / Construcción Demostrador (2010-2011)
Tipo de motor CinemáticoCilindros Dos
CARACTERÍSTICAS DEL CICLOFluido de trabajo HidrógenoMasa del fluido 237 10E-3 kg
Temp. foco caliente 850KTemp. foco frío 400kRango presiones 7.8-35.8 bar
RPM (multiplicador) 3000 rpmCARACTERÍSTICAS MECÁNICAS
Cilindrada 1000 ccVolumen muerto 54 cc
Generador Generador de inducciónPotencia al eje 24.8 kW
Pot. eléctrica salida 20 kWeFases 3-Phase
Voltaje / Frecuencia 480 VAC @ 50 HzCombustible Colector Solar
Eficiencia eléctrica 55%Rendimiento 25% (Global de todo el sistema)
Intervalo de servicio Paradas de mantenimiento programadas: 24 mesesVida en servicio 25 años
Coste de fabricación 35000 € por sistemaCoste Op. y Mant 3% del coste fabricación (anual por sistema)
5.2.2. Características de las servidumbres solares
Se presenta a continuació las principales características de las servidumbres del siste-ma Stirling
Generador Solar de Ciclo de Aire
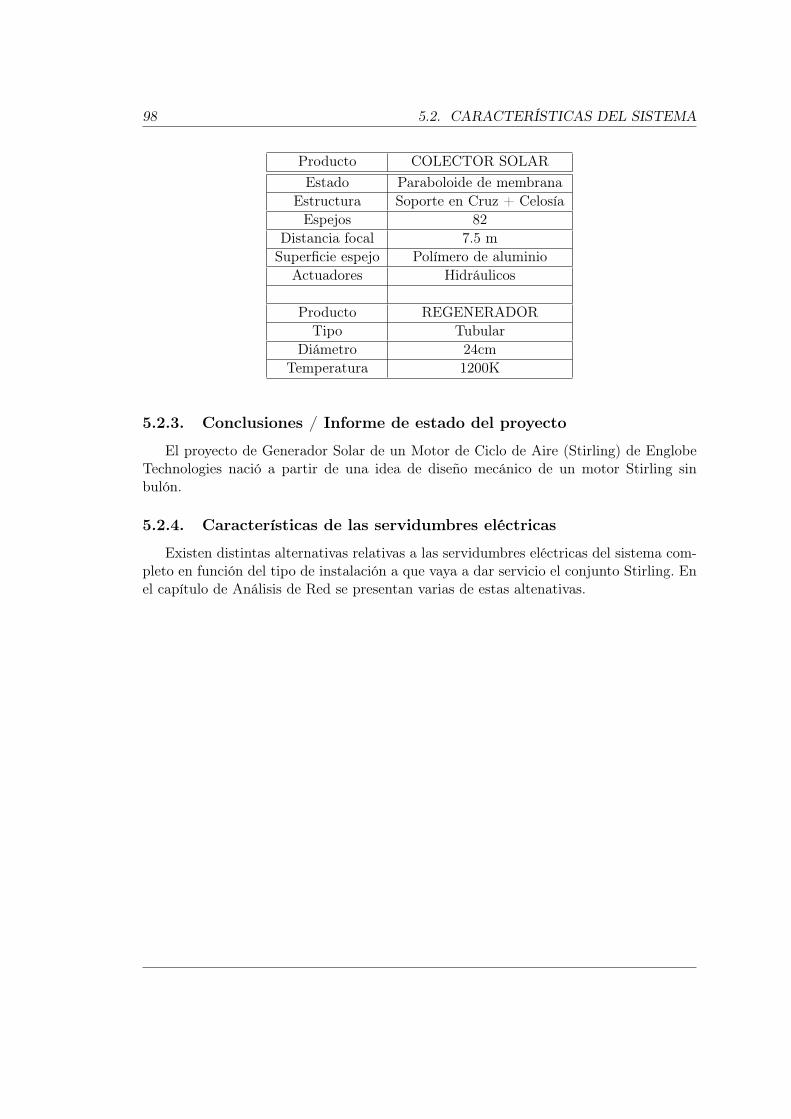
98 5.2. CARACTERÍSTICAS DEL SISTEMA
Producto COLECTOR SOLAREstado Paraboloide de membrana
Estructura Soporte en Cruz + CelosíaEspejos 82
Distancia focal 7.5 mSuperficie espejo Polímero de aluminio
Actuadores Hidráulicos
Producto REGENERADORTipo Tubular
Diámetro 24cmTemperatura 1200K
5.2.3. Conclusiones / Informe de estado del proyecto
El proyecto de Generador Solar de un Motor de Ciclo de Aire (Stirling) de EnglobeTechnologies nació a partir de una idea de diseño mecánico de un motor Stirling sinbulón.
5.2.4. Características de las servidumbres eléctricas
Existen distintas alternativas relativas a las servidumbres eléctricas del sistema com-pleto en función del tipo de instalación a que vaya a dar servicio el conjunto Stirling. Enel capítulo de Análisis de Red se presentan varias de estas altenativas.

Capítulo 6
Análisis de las posibles patentes
6.1. Introducción. Las patentes en España
La estructura del Sistema español de Ciencia-Tecnología-Empresa está configuradapor el conjunto de instituciones y organismos de titularidad pública o privada dedicados ala generación, difusión y aplicación de conocimiento científico y tecnológico, así como porlas denominadas infraestructuras de apoyo o unidades de interfaz que permiten disponerde un conjunto rico de interacciones para cubrir de forma flexible los objetivos planteados.
Hoy en día es fácil encontrar extensas colecciones de datos sobre patentes, que permitenllevar a cabo análisis cuantitativos sobre el papel de la tecnología a nivel sectorial y sucorrelación con variables económicas como el PIB, las exportaciones e importaciones,entre otras. Sin embargo, estos análisis presentan una cierta complejidad debido a quelos datos de patentes disponibles se estructuran utilizando el sistema de clasificación in-ternacional IPC (International Patent Classification), que categoriza las invenciones porproductos o procesos y muchas veces no se encuentran a nivel de sectores de actividadeconómica.
6.1.1. Oficina Española de Patentes y Marcas
En España la Oficina Española de Patentes y Marcas (OEPM) es un organismo autó-nomo del Ministerio de Industria, Turismo y Comercio que impulsa y apoya el desarrollotecnológico y económico otorgando protección jurídica a las distintas modalidades depropiedad industrial mediante la concesión de patentes y modelos de utilidad (invencio-nes); diseños industriales (creaciones de forma); marcas y nombres comerciales (signosdistintivos) y títulos de protección de las topografías de productos semiconductores.
99

100 6.1. INTRODUCCIÓN. LAS PATENTES EN ESPAÑA
Figura 6.1: Estructura del sistema español de tecnología-empresa. Fuente: Ministerio deIndustria
Figura 6.2: Energías alternativas. Evolución y número de patentes internacionales portecnologías

CAPÍTULO 6. ANÁLISIS DE LAS POSIBLES PATENTES 101
Figura 6.3: Energías alternativas. Evolución y número de patentes internacionales portecnologías
Generador Solar de Ciclo de Aire

102 6.1. INTRODUCCIÓN. LAS PATENTES EN ESPAÑA
Figura 6.4: Energías alternativas. Registro internacional de patentes de energía térmicasolar
6.1.2. Oficina Europea de Patentes
La Oficina Europea de Patentes (OEP) es el organismo encargado de la aplicaciónadministrativa del Convenio sobre la Patente Europea gracias al que mediante un únicoprocedimiento se pueden conseguir patentes nacionales en todos los países firmantes.
El proceso de concesión de una patente europea suele durar varios años. Para iniciar elprocedimiento hay que realizar una solicitud que debe constar de una memoria descriptivay una o varias reivindicaciones. En la memoria se divulga la invención de forma que unexperto en la materia la pueda llevar a cabo y en las reivindicaciones se define el objetopara el que se solicita la protección que otorga la patente.
6.1.3. Costes de las patentes
Los costes aproximados hasta la concesión de una patente son los siguientes (2008) :
Concepto ImportePatente nacional en España sin Examen Previo 700 €Patente nacional en España con Examen Previo 1.200 €
Europea (status 2006) 35.000 €PCT (Fase Internacional sin Examen preliminar) 2.610 €

CAPÍTULO 6. ANÁLISIS DE LAS POSIBLES PATENTES 103
6.1.4. Las patentes de motores Stirling
El principio de funcionamiento del motor Stirling reside en conceptos sencillos plas-mados por el reverendo Stirling en el siglo XIX más de 80 años antes de la invención delos motores de ciclo Diesel y Otto. Se ha reconocido el potencial del motor Stirling desdehace más de un siglo debido a las altas eficiencias de su ciclo termodinámico, sin embargosu desarrollo se ha visto limitado por requisitos técnicos relativos al sellado, materiales,el regenerador térmico, el tamaño y su peso específico.
Durante los últimos 200 años inventores particulares y grupos de investigación con finan-ciación pública y privada han generado múltiples artículos cientificos así como solicitadopatentes de propiedad industrial relacionados con distintos elementos de diseño. Ha sidoen las 2 últimas decadas cuando se ha retomado con ímpetu el estudio de este motordebido al interés demostrado por el desarrollo de medios de producción energéticos al-ternativos a la quema de combustibles fósiles.
Literalmente se han generado miles de patentes en los últimos años que resolvían algunosde los retos tecnológicos que presentaba el motor Stirling, por ejemplo existen decenasde propuestas para la unión entre pistón y cigüeñal. Sin embargo, aunque la mayoríade las patentes se presentan como definitivas en cuanto a que resuelven los problemastecnológicos existentes, la realidad es que por lo general cada avance propuesto a llevadoaparejada la introducción de otras problemáticas en el funcionamiento y explotación delmotor. es por tanto, que aún no existe un diseño definitivo de alto rendimiento, bajocoste y gran fiabilidad.
En este escenario ENGLOBE TECHNOLOGIES dedicó sus esfuerzos I+D del ejercicio2009 al desarrollo de una solución tecnológica propia, con al menos 2 avances tecnológicossusceptibles de ser patentados: configuración mecánica del motor y regenerador térmico.
Generador Solar de Ciclo de Aire

104 6.1. INTRODUCCIÓN. LAS PATENTES EN ESPAÑA
6.1.5. Base de datos utilizada
Se han utilizado distintas bases de datos de proyectos y patentes Stirling para elanálisis del estado del arte de la tecnología, utilizando como buscador el motor de SIP(SW for Intellectual Property GmBH)Las principales referencias como fuentes de documentos de este buscador son:
US Patent and Trademark Office
DOCDB Database (base de datos de la Oficina Europea de Patentes)
German Patent and Trademark Office
Oficina Española de Patentes y Marcas

CAPÍTULO 6. ANÁLISIS DE LAS POSIBLES PATENTES 105
6.2. Análisis de tecnologias existentes.
Se presentan a continuación distintos conjuntos Stirling de configuración solar deplato parabólico o susceptibles de adaptarse a ésta, todos ellas con algún elementos bajoprotección industrial y registrado en una oficina internacional de patentes. El criteriopara la selección de estos sistemas es la similitud en tamaño/potencia con el diseño demtor Stirling propuesto por ENGLOBE TECHNOLOGIES, lo que permite compararlos resultados del trabajo con tecnologías ya existentes y potenciales competidores en elmercado.
6.2.1. ADI THERMAL
ADI Thermal Power Corp. ha desarrollado un motor Stirling cinemático de alta tem-peratura. El motor proyectado para una potencia de salida de 25kWe está diseñado conuna fuente térmica de gas natural. ADI Thermal pretende comenzar a comercializar eldiseño con potencias de salida de hasta 100 kW para aplicaciones de generación distribui-da. El objetivo declarado de la compañía es conseguir factores de efiiciencia energéticade hasta el 50%.
El motor de ADI Thermal no se presenta en configuración solar pero la adaptación aeste formato no ha de presentar problema. Aparentemente los costes de adquisición sonconpetitivos frente a otras alternativas el precio del motor por kWh es barato, sin em-bargo por las características del mismo (1 solo cilindro) su versión solar ha de implicarun coste desproporcionado en el desarrollo de la estructura portante del colector solar.
Generador Solar de Ciclo de Aire

106 6.2. ANÁLISIS DE TECNOLOGIAS EXISTENTES.
Producto Motor integradoProduct Status Design/Lab Stage, May Have a Single Unit in TestingEngine Type Kinematic
Cylinders / Power Pistons OneWorking Fluid Helium
Hot End Temperature Up to 2,000 ºF Up to 1,100ºCPressure Up to 1,000 psi
Engine Shaft Speed 1,200-1,800 rpmGenerator / Alternator Poly-phase Generator
Power Output 25 kWe ACPhases 3-Phase
Voltage/Frequency 480 VAC @ 60 HzFuel Natural Gas
Electrical Efficiency 50% (LHV Fuel In to AC Electricity Out)Overall Efficiency 80% (LHV Fuel In to AC Electricity and Usable Heat Out)Servicing Interval 2 years (smaller bearings, seals, etc.)Product Lifetime 10-20 years (with continuous operation)
Price to Distributor $400-500/kWe @ 40,000-50,000 units/yearO&M Cost $0.005/kWh

CAPÍTULO 6. ANÁLISIS DE LAS POSIBLES PATENTES 107
6.2.2. KOCKMUS
Kockums of Malmö es un fabricante tradicional del sector naval, siendo conocidosen los últimos tiempos por sus desarrollos innivadores en buques navales militares demediano porte, fundamentalmente fragatas, dotados con tecnología stealth así como sub-marinos dotados de pilas de combustible y motores stirling aplicados a la generacióneléctrica abordo. Ésta última aplicación es especialmente indicada por las caracteristicasdel motor Stirling ya que éste implica eliminar la necesidad de exhaustación de gases.
El motor Stirling integrado de Kockmus puede ser un motor de referencia para el desa-rrollo de Englobe Technologies ya que sus características son similares a las estimadasen el desarrollo llevado a cabo: la potencia es de 25kWe, la temperatura de trabajo essimilar, etc. Por contra, el coste de producción de la serie de motores Stirling tiene uncoste más competitivo estimado en 35.000€ para el sistema completo con el potenciaeléctrica de salida de 20kWe y mecánica al eje de 25kW, mientras que el equivalente deKockmus se ofrece por $80.000 (50.000€)
Producto Motor integradoProduct Status In ProductionEngine Type Kinematic
Cylinders / Power Pistons FourWorking Fluid Hydrogen
Hot End Temperature 1,300-1,400 ºF 700-750 ºCGenerator / Alternator Induction Generator
Power Output 25 kWe ACPhases 3-Phase
Voltage/Frequency 440 VAC @ 50 or 60 HzFuel Solar Radiation
Electrical Efficiency 42% (LHV Fuel In to Shaft Power Out)Overall Efficiency 80% (LHV Fuel In to AC Electricity and Usable Heat Out)Servicing Interval Up to 18,000 Hours
Price to Distributor $4,000/kWe @ low production (current price)
Generador Solar de Ciclo de Aire

108 6.2. ANÁLISIS DE TECNOLOGIAS EXISTENTES.
6.2.3. QUIET REVOLUTION MOTOR COMPANY
Quiet Revolution Motor Company (QRMC) es una compañía fundada en el año 1999con el propósito declarado de construir un demostrador de su diseño y patentado Hydra-Link™ por sus socios fundadores. La compañía utiliza tecnología hidráulica para superaralgunos de los escollos habituales relacionados con la fiabilidad de los motores. El primerprototipo proyectado es de 100 cv.QMRC publicita como variadas las posibles aplicaciones desu motor: generación distru-buida, potencia auxiliar y distintas aplicaciones de pontecia.
Se ha escogido este diseño como ejemplo y muestra destacada entre los motores Stir-ling con patentes generadas aunque por sus características y tamaño es descartable lacolisión en los intereses de QUIET REVOLUTION y ENGLOBE TECHNOLOGIES almenos en la configuración solar que no es aplicable al diseño de esta empresa.
Figura 6.5: Prototipo Stirling de 3 cilindros de QUIET REVOLUTION MOTOR COM-PANY
Producto MotorProduct Status Design/Lab Stage, May Have a Single Unit in TestingEngine Type Free-Piston
Cylinders / Power Pistons ThreeWorking Fluid HeliumPower Output 75 kWe AC
Phases 3-PhaseFuel Natural Gas
Electrical Efficiency 45% (LHV Fuel In to AC Electricity Out)Overall Efficiency 80% (LHV Fuel In to AC Electricity and Usable Heat Out)

CAPÍTULO 6. ANÁLISIS DE LAS POSIBLES PATENTES 109
6.2.4. SOLO KLEINMOTOREN GmbH
La compañía alemano SOLO Kleinmotoren GmbH es un fabricante de equipamientoagrícola que adquirió una licencia del motor de Kockums. SOLO desarrolló un motorStirling de 10 kWe en 1990 que sirvió de base para las versiones posteriores.
Desde entonces más de 100 demostradores del motor SOLO sistemas han sido fabri-cados e instalados en las configuraciones solar y de gas. Pese a que el motor de SOLOestá diseñado para aplicaciones de fin de l´nea de usuarios particulares en una posiciónmás cercana a la base de la escala de distribución que el diseño de ENGLOBE TECHN-LOGIES, la empresa resulta un referente en el mercado de las energías alternativas apartir de diseños Stirling.
Figura 6.6: Prototipo SOLO 161 de SOLO KLEINMOTOREN GmbH
Generador Solar de Ciclo de Aire

110 6.2. ANÁLISIS DE TECNOLOGIAS EXISTENTES.
Figura 6.7: Prototipo SOLO 161 de SOLO KLEINMOTOREN GmbH
Producto Motor integradoProduct Status Many (10-20) Pre-Production Prototypes in the Field (beta)Engine Type Kinematic
Cylinders / Power Pistons OneWorking Fluid Helium
Hot End Temperature 1,200 ºF 650 ºCPressure 435-2,175 psi
Engine Shaft Speed 1,500 rpmGenerator / Alternator Asynchronous Generator
Power Output 2-10 kWe AC (varied by pressure)Phases 3-Phase
Voltage/Frequency 400 VAC @ 50 HzFuel Natural Gas
Electrical Efficiency 24% (LHV Fuel In to AC Electricity Out)Overall Efficiency 90% (LHV Fuel In to AC Electricity and Usable Heat Out)Servicing Interval Yearly (3 hours downtime)Product Lifetime 10-20 years (with continuous operation)
Price to Distributor $20,000 per system @ low production (current price)

CAPÍTULO 6. ANÁLISIS DE LAS POSIBLES PATENTES 111
6.2.5. STIRLING ENERGY SYSTEMS, INC.
Stirling Energy Systems, Inc. (SESI) es una empresa que ha desarrollado distintasconfiguraciones de plantes de generación bassadas en fuentes renovables. La compañíaha instalado y monitorizado variosprototipos demostradores de un motor Stirling en susinstalaciones de Huntington Beach (California) asi como en su sede de Phoenix (Arizona)
SESI cuenta con varias patentes de tecnologías de concentrador solar desarrolladas origi-nalmente por McDonnell Douglas y ha vendido varios demostradores que finalmente hansido instalados en una configuración solar.
SESI es un sistema de referencia para el desarrollo de ENGLOBE TECHNOLOGIESpuesto que el motor licenciado por la empresa tiene características similares al del pre-sente proyecto: 25kWe de potencia de salida, hidrógeno como fluido de trabajo, generadorde inducción y rangos de temperatura de trabajo similares. Por otro lado el motor deSESI tiene un coste de producción mucho más alto que el de ENGLOBE y es un diseñode 4 cilindros frente a la configuración bicilíndrica del presente proyecto.
Figura 6.8: Prototipo SESI de STIRLING ENERGY SYSTEMS, INC
Generador Solar de Ciclo de Aire

112 6.2. ANÁLISIS DE TECNOLOGIAS EXISTENTES.
Producto Motor integradoProduct Status Multiple (<10) Early Units in Testing (alpha)Engine Type Kinematic
Cylinders / Power Pistons FourWorking Fluid Hydrogen
Hot End Temperature 1,330 ºF 720 ºCEngine Shaft Speed 1,800 rpm
Generator / Alternator Induction GeneratorPower Output 25 kWe AC
Phases 3-PhaseVoltage/Frequency 480 VAC @ 60 Hz
Fuel Solar RadiationElectrical Efficiency 32-33% (Solar Energy In to AC Electricity Out)Servicing Interval YearlyProduct Lifetime 30 years
Price to Distributor $250,000 per system (current price)O&M Cost $0.008/kWh

CAPÍTULO 6. ANÁLISIS DE LAS POSIBLES PATENTES 113
6.2.6. STM POWER, INC.
STM Power, Inc. es una empresa desarrolladora de motores Stirling y sistemas degeneración de potencia para aplicaciones de fin de línea. El sistema prototipo propuestopor la compañía tiene una potencia de salida de 25 kWe.
El motor Stirling desarrollado por STM es un diseño flexible orientado a un uso fle-xible que pueda utilizar múltiples fuentes térmicas, de esta forma existe una versión delmotor en configuración solar: el SunDish Solar que combina un motor y un colector bajolicencia de SunDish Solar.
El STM es también un un sistema de referencia para el motor Stirling de ENGLOBETECHNOLOGIES siendo de parecidas cartacterísticas al de ESI aunque tienen menosrpm que el motor de ENGLOBE y cuenta con 4 cilindros.
Figura 6.9: Prototipo STM de STM POWER INC.
Generador Solar de Ciclo de Aire

114 6.2. ANÁLISIS DE TECNOLOGIAS EXISTENTES.
Producto Motor integradoProduct Status Multiple (<10) Early Units in Testing (alpha)Engine Type Kinematic
Cylinders / Power Pistons FourWorking Fluid Hydrogen
Hot End Temperature TBDEngine Shaft Speed 1,800 rpm
Generator / Alternator Induction GeneratorPower Output 25 kWe AC
Phases 3-PhaseVoltage/Frequency 480 VAC @ 60 Hz
Fuel Natural Gas, Propane, Diesel, GasolineElectrical Efficiency 30.9%Servicing Interval Yearly (filters, lubricating oil, etc.)Product Lifetime 40,000 hours
Price to Distributor $1,000/kWe

CAPÍTULO 6. ANÁLISIS DE LAS POSIBLES PATENTES 115
6.2.7. TAMIN
TAMIN es una pqqueña compañía privada que ha estado implicada en el diseño ydesarrollo de tecnologías Stirling desde principios de los 90. Dentro de los motores deTAMIN cabe destacar por su mayor similitud con el proyecto de ENGLOBE el motorCAM002 cuyas características principales se presentan a continuación..
.
Figura 6.10: Prototipos TESE0002 y CAM001 de TAMIN
Producto Motor integradoProduct Status Design/Lab Stage, May Have a Single Unit in TestingEngine Type Kinematic
Cylinders / Power Pistons OneWorking Fluid Helium
Hot End Temperature 1,200 ºF 650 ºCPressure 300 psi
Generator / Alternator TBDPower Output 10 kWshaft
Phases Single PhaseVoltage/Frequency 120 VAC @ 60 Hz
Fuel Natural Gas, DieselElectrical Efficiency 35%Servicing Interval TBDProduct Lifetime 50,000 hours
Price to Distributor $2,000 per engine
Generador Solar de Ciclo de Aire

116 6.2. ANÁLISIS DE TECNOLOGIAS EXISTENTES.

Parte II
Diseño Preliminar
117


Capítulo 7
Modelo de funcionamiento térmicodel motor
7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DELMOTOR
Un motor térmico es un dispositivo físico que convierte la energía térmica en energíamecánica de salida. La energía mecánica de salida se denomina trabajo, y la energíatérmica recibida se denomina calor. Los motores térmicos normalmente operan medianteun ciclo termodinámico específico; que en este caso se trata del ciclo termodinámicoStirling. Los motores térmicos pueden ser abiertos al aire atmosférico (denominados deciclo abierto) o cerrados y sellados encerrando en su interior el fluido de trabajo (de ciclocerrado); siendo éste el caso de un motor que sigue un ciclo cerrado.
En ingeniería y termodinámica, un motor térmico realiza la conversión de energíatérmica en trabajo mecánico aprovechando el gradiente de temperaturas entre la fuentetérmica de alta temperatura, que hace de fuente de calor, y la fuente térmica de bajatemperatura que actúa como sumidero de calor. El calor se transfiere desde la fuente decalor, a través del cuerpo del motor, hacia el sumidero, y en este proceso una parte delcalor se convierte en trabajo aprovechando las propiedades de una sustancia, normal-mente un gas o un líquido; para nuestra aplicación emplearemos como fluido de trabajoen principio aire, aunque se dedica un apartado para discutir sobre la utilización de otrosfluidos operantes.
Los motores de combustión interna son aquellos en los que la oxidación de un com-bustible se produce en una cámara de combustión. En un motor de combustión interna laexpansión de los gases a muy alta presión y temperatura, alcanzados mediante la combus-tión, aplican directamente la fuerza a un componente móvil del motor, como los pistoneso los álabes de un rotor y moviéndolos una cierta distancia generan energía mecánicaútil.
Los motores de combustión externa son los que el fluido de trabajo situado en suinterior se calienta mediante el aporte de calor desde una fuente exterior, a través de
119

120 7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR
las fronteras del motor o más comúnmente a través de un intercambiador de calor. Elfluido entonces se expande actuando sobre los mecanismos del motor que producen elmovimiento de los mismos obteniendo un trabajo neto útil. El fluido entonces se enfría,se comprime y se reutiliza, porque se trata de un ciclo cerrado.
Los motores de combustión interna son ligeramente diferentes de los de combustiónexterna, en los que la energía se aplica al fluido de trabajo, sin que exista ninguna mezclao contaminación del fluido de trabajo por productos de la combustión.
7.1.1. DEFINICIÓN DEL MOTOR STIRLING SEGÚN SU CICLO
Un motor Stirling es un motor térmico que opera mediante el ciclo termodinámicode Stirling, comprimiendo y expandiendo el fluido de trabajo a diferentes niveles detemperatura de forma que se tiene una conversión neta de energía térmica en trabajomecánico.
Figura 7.1: Ciclo Ideal Stirling
El motor es como una máquina de vapor en la que todo el calor del motor fluyehacia dentro y hacia fuera de las fronteras del motor. Esto se conoce como motor decombustión externa, en contraste con el motor de combustión interna. A diferencia delas máquinas de vapor, que usan agua en fase líquida y gaseosa como fluido de trabajo,el motor Stirling encierra una cantidad fija de fluido de trabajo, permanentemente ga-seoso como aire o helio. Como en todos los motores térmicos, el ciclo general consiste encomprimir el gas, calentarlo, expandirlo y finalmente enfriarlo antes de volver a repetirel ciclo. Un cambio en la temperatura del gas producirá el correspondiente cambio en lapresión del mismo, mientras que el movimiento del pistón hace que el gas se comprima yse expanda alternativamente. El motor Stirling se destaca por su alta eficiencia, silenciosaoperación, y la versatilidad con la que puede funcionar usando casi cualquier fuente tér-mica. Esta compatibilidad con las energías alternativas y renovables se ha incrementadosignificativamente desde que el precio de los combustibles convencionales han aumentado.
El motor está diseñado de forma que el fluido se comprime en la parte fría del mo-tor y es expandida en la parte más caliente, con la correspondiente conversión de la

CAPÍTULO 7. MODELO DE FUNCIONAMIENTO TÉRMICO DEL MOTOR 121
energía térmica en trabajo neto mecánico directamente utilizable. Un cambiador de ca-lor denominado “Regenerador” incrementa el rendimiento térmico del motor Stirling encomparación con los motores de ciclo de aire caliente más sencillos que carecen de estacaracterística.
Las máquinas que operan según el ciclo Stirling son los motores térmicos más efi-cientes en la práctica jamás construidos. Funcionando como un motor pueden operar apartir de cualquier fuente térmica, en este caso adición de calor a partir de energía solar.Funcionando como máquinas refrigeradoras o bombas de calor, las máquinas que siguenel ciclo Stirling ofrecen la posibilidad de usar refrigerantes más seguros como el aire, evi-tando por tanto daños medioambientales causados por los refrigerantes que normalmentese emplean.
7.1.2. COMPONENTES DEL MOTOR
Hay cinco componentes que afectan principalmente al funcionamiento térmico delmotor:
Figura 7.2: Componentes del motor Stirling y su principio de funcionamiento
Fluido de trabajo: El ciclo Stirling es un ciclo cerrado y los distintos procesostermodinámicos se llevan a cabo en el fluido de trabajo que está atrapado en elinterior del sistema.
Cambiadores de calor: Se usan dos cambiadores de calor para transferir el calor através de las fronteras del sistema.Un intercambiador de calor absorbe el calor y lotransfiere desde el exterior del sistema, desde la fuente térmica, hasta el fluido detrabajo que se encuentra en el interior del sistema. El otro intercambiador de calorevacúa el calor y lo transfiere desde el fluido de trabajo al exterior del sistema.
Generador Solar de Ciclo de Aire

122 7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR
Mecanismo desplazador: De lo que se encarga es de desplazar o mover el fluido detrabajo entre los extremos caliente y frio del motor, mediante el regenerador.
Regenerador: Éste actúa como barrera térmica entre el extremo caliente y frío delmotor, pero también como almacén térmico para el ciclo. Físicamente el regeneradorconsiste normalmente en una trama de material; y el calor se transfiere al fluidode trabajo a medida que fluye a través de la trama de material que configura elregenerador. Cuando el fluido de trabajo se desplaza del lado caliente al lado fríodel motor a través del regenerador, el calor se almacena en el regenerador, y latemperatura del fluido de trabajo disminuye. Cuando el flujo es el inverso, el caloralmacenado en el regenerador es devuelto al fluido y por tanto la temperatura delfluido de trabajo es incrementada.
Mecanismo de expansión y compresión: Lo que hace este conjunto es expandir ycomprimir el gas de trabajo. En un motor este mecanismo produce un trabajo netode salida. En una máquina refrigeradora o bomba de calor se necesita un trabajoneto de entrada para mover el calor de la fuente térmica de baja temperatura a lade alta temperatura, de acuerdo con el Segundo Principio de la Termodinámica.
El gas sigue el comportamiento dado por las leyes de los gases, que describen cómose relacionan la presión, temperatura y el volumen del gas. Cuando el gas se calienta,debido a que está encerrado en un volumen sellado, la presión aumenta, lo que actúasobre el pistón de potencia para producir una carrera de potencia. Cuando se enfría elgas, la presión cae y esto significa que hace falta aplicar menos trabajo en el pistón paracomprimir el gas en la carrera de retorno, obteniendo de esta forma un trabajo neto desalida.
El motor Stirling utiliza la diferencia de temperaturas entre los extremos caliente y fríodel motor para establecer un ciclo de una cantidad fija de gas, calentando y expandiendo,y enfriando y comprimiendo, así convertimos la energía térmica en energía mecánica.Cuanto mayor sea la diferencia de temperaturas entre las fuentes térmicas de alta y bajatemperatura, mayor será el rendimiento del motor. El rendimiento máximo teórico quese puede alcanzar es equivalente al del ciclo de Carnot, que es el rendimiento máximoteórico que puede alcanzar cualquier máquina térmica, sin embargo el rendimiento de losmotores reales es menor que este valor debido a la fricción y otras pérdidas.
En la mayoría de los motores Stirling a partir de cierta potencia, tanto la presiónmínima del ciclo termodinámico como la máxima, están por encima de la presión at-mosférica. Esta presurización inicial del motor se puede realizar mediante una bomba, ollenando el motor de gas desde un depósito a presión, o incluso sellando el motor cuandola temperatura es menor que la temperatura media de operación del motor. Todos estosmétodos consiguen incrementar la masa de fluido de trabajo en el ciclo termodinámico.Además, todos los cambiadores de calor deben ser dimensionados correctamente parasuministrar el calor necesario durante el ciclo. Si los cambiadores de calor están biendimensionados y pueden suministrar el flujo suficiente de calor para la transferencia decalor por convección durante el ciclo, el motor, en primera aproximación, producirá una

CAPÍTULO 7. MODELO DE FUNCIONAMIENTO TÉRMICO DEL MOTOR 123
potencia proporcional a la presión media como afirman los Número de West y de Beale.En la práctica, la máxima presión también está limitada por la presión de seguridad deldepósito a presión, que se establece en la normativa. Como la mayoría de los aspectosde diseño del motor Stirling, la optimización en este caso también es multivariable, y aveces tiene requerimientos que están en conflicto.
Una máquina que siga el ciclo Stirling se puede construir mediante diferentes configu-raciones. Por ejemplo, los mecanismos de compresión y expansión se pueden configurarcomo turbomáquinas, un conjunto de cilindro y pistón o mediante ondas acústicas. Lomás corriente en las máquinas que siguen el ciclo Stirling es emplear conjuntos de cilindroy émbolo, en cualquiera de sus configuraciones: α- alfa, β- beta o γ- gamma.
Un motor Stirling del tipo Alfa contiene dos pistones de potencia en cilindros se-parados, uno en el frío y otro en el caliente. El cilindro caliente está situado dentrodel cambiador de calor de alta temperatura y el cilindro frío está situado en el de bajatemperatura. Este tipo de motores tiene una alta relación potencia-volumen pero tienenproblemas técnicos debido a las temperaturas tan altas que normalmente se alcanzan enel pistón del cilindro caliente, y la fiabilidad del sellado del sistema. En la práctica, estepistón suele llevar una gran cabeza aislante para alejar el sellado de la zona caliente acosta de añadir cierto volumen muerto adicional.
Figura 7.3: Esquema de la configuración Alfa
Un motor Stirling tipo Beta tiene un único pistón de potencia en el mismo eje queel pistón desplazador, todo ello organizado en el interior del mismo cilindro. El pistóndesplazador es un pistón con holguras del que no se obtiene potencia de la expansióndel gas pero sólo sirve para lanzar o desplazar el fluido de trabajo desde el cambiadorde calor de alta temperatura al de baja temperatura. Cuando el fluido de trabajo esempujado hacia el lado caliente del cilindro de potencia, se expande y empuja al pistónde potencia. Cuando es empujado hacia el lado frío del cilindro se contrae y el momentocinético de la máquina, mejorado por el volante de inercia, empuja al pistón de potenciapara comprimir el gas. A diferencia del tipo Alfa, los motores Stirling de tipo Beta evitanlos problemas técnicos de las pártes móviles selladas para evitar las fugas de fluido detrabajo en las zonas calientes del motor, modificando simplemente la organización de losémbolos en el cilindro.
Generador Solar de Ciclo de Aire

124 7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR
Figura 7.4: Esquema de la configuración Beta
Una máquina con configuración Alfa tiene dos pistones separados, uno desplazador yotro de compresión y expansión, normalmente denominado cilindro y pistón de potencia.La configuración Beta usa dos émbolos en el mismo cilindro que desplazan y comprimeno expanden el gas de forma simultánea.
Un motor Stirling de tipo Gamma es simplemente un motor tipo Beta en el que elpistón de potencia está montado en un cilindro separado junto al cilindro del pistóndesplazador, pero que todavía está conectado al mismo volante de inercia. El gas enlos dos cilindros puede fluir libremente entre ellos y permanece en un solo cuerpo. Estaconfiguración da lugar a una relación de compresión más baja, pero mecánicamente esmás sencillo y a menudo se usa en motores Stirling de varios cilindros.

CAPÍTULO 7. MODELO DE FUNCIONAMIENTO TÉRMICO DEL MOTOR 125
Figura 7.5: Esquema de la configuración Gamma
En la siguiente figura se representan las tres configuraciones del motor Stirling:
Figura 7.6: Las tres configuraciones posibles del motor Stirling: de izquierda a derechase tiene en primer lugar la configuración Alfa, a continuación la Beta y por último laconfiguración Gamma
7.1.3. FUNCIONAMIENTO BÁSICO DEL MOTOR:
El funcionamiento básico del motor, para la configuración alfa, como es la nuestra,es:
Generador Solar de Ciclo de Aire

126 7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR
Figura 7.7: Esquema de un motor Stirling tipo α
La mayoría del fluido de trabajo está en contacto con las paredes del cilindro depotencia, ha sido calentado y la expansión ha empujado el émbolo del cilindro depotencia al fondo de su recorrido. La expansión continua en el cilindro de compre-sión, que está desfasado 90º de giro de cigüeñal por detrás del émbolo del cilindrode potencia en su ciclo, extrayendo mayor cantidad de trabajo del gas a alta tem-peratura.
El gas está en su máximo volumen. El pistón del cilindro de potencia empieza amover la mayor parte del gas al cilindro de compresión, donde se enfría y por tanto,cae la presión.
Casi todo el gas está ahora en el cilindro de compresión, donde continúa la cesiónde calor. El cilindro de compresión, obligado en su movimiento por el momento delvolante de inercia (u otro par de pistones con sus respectivos cilindros en el mismoeje) comprime la parte restante del gas.
El gas alcanza su volumen mínimo, y ahora se expande en el cilindro de potenciadonde una vez más se calentará, moviendo el pistón del cilindro de potencia en lacarrera que produce potencia.
Se debería resaltar que las máquinas de ciclo Stirling aquí se han considerado conside-rándolas ideales. Los motores prácticos que siguen el ciclo Stirling difieren de lo ideal endiferentes aspectos:

CAPÍTULO 7. MODELO DE FUNCIONAMIENTO TÉRMICO DEL MOTOR 127
El regenerador y los cambiadores de calor en las máquinas de ciclo Stirling en lapráctica no tienen volúmenes muertos nulos. Esto significa que el gas de trabajo nose encuentra nunca completamente ni en la zona caliente ni en la fría, y por tanto,nunca a una temperatura uniforme.
El movimiento de los pistones normalmente es de forma senoidal en lugar de dis-contínua, lo que conduce a una manipulación del gas de trabajo que no es óptima.
Los procesos de compresión y expansión en las máquinas prácticas de ciclo Stirlingson politrópicos en lugar de isotermas. Esto hace que existan variaciones de presióny de temperatura en el gas de trabajo, lo que conlleva a pérdidas en los transitoriosy a que los procesos no sean completamente adiabáticos, sino que haya pérdidas decalor.
Las pérdidas por fricción en el fluido ocurren mientras el gas se desplaza, particu-larmente debido al flujo a través del regenerador.
Otros factores como la conducción de calor entre los extremos caliente y frío dela máquina, el sellado para evitar fugas de gas, fricción en el gas de trabajo, losefectos de los volúmenes adicionales, y la fricción y la cinemática de los mecanismosinvolucrados hacen que las máquinas reales que funcionan mediante el ciclo realStirling tengan un comportamiento diferente de lo ideal.
A pesar de que las máquinas de ciclo Stirling teóricamente alcancen un rendimiento comoel límite de Carnot, los factores antes descritos tienden a reducir las prestaciones de lasmáquinas reales, a un valor significativamente menor que el límite teórico. En la figurase puede ver el diagrama el ciclo termodinámico de Carnot:
Figura 7.8: Ciclo Termodinámico de Carnot
Vamos a considerar ahora algunos aspectos técnicos de la operación del motor queson relevantes tanto en el movimiento de los componentes como en la operación del ciclotermodinámico del motor:
Generador Solar de Ciclo de Aire
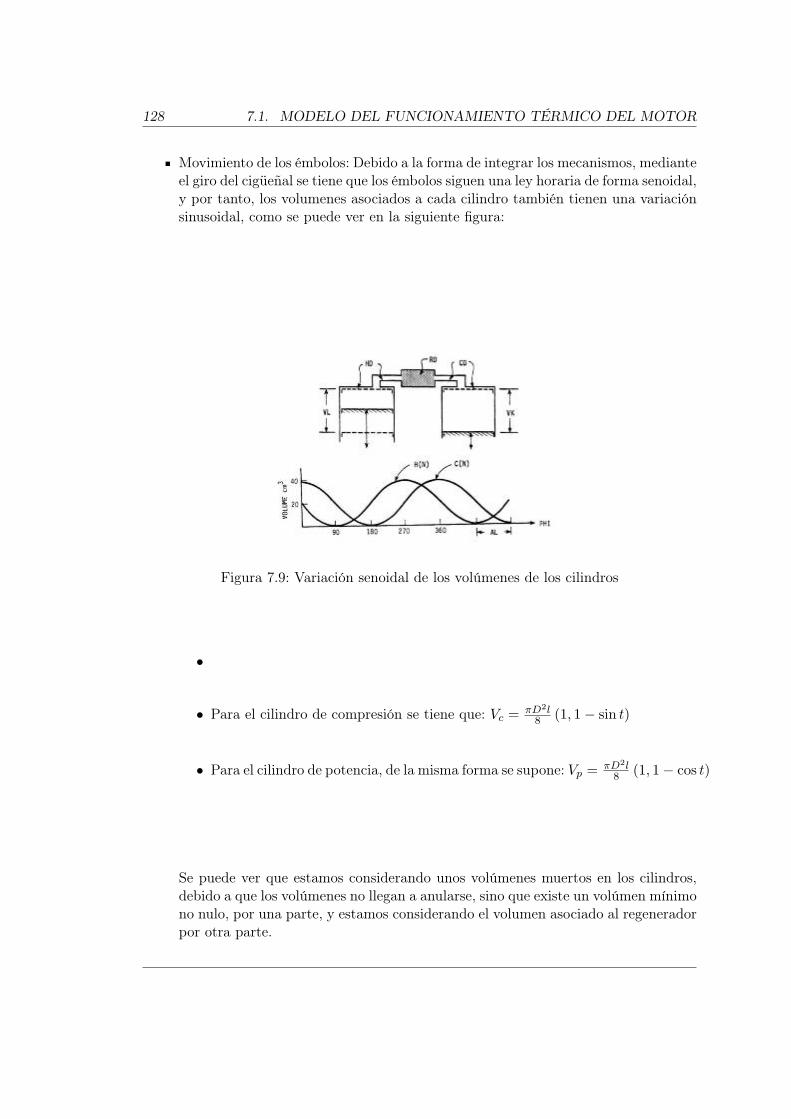
128 7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR
Movimiento de los émbolos: Debido a la forma de integrar los mecanismos, medianteel giro del cigüeñal se tiene que los émbolos siguen una ley horaria de forma senoidal,y por tanto, los volumenes asociados a cada cilindro también tienen una variaciónsinusoidal, como se puede ver en la siguiente figura:
Figura 7.9: Variación senoidal de los volúmenes de los cilindros
•
• Para el cilindro de compresión se tiene que: Vc = πD2l8 (1, 1− sin t)
• Para el cilindro de potencia, de la misma forma se supone: Vp = πD2l8 (1, 1− cos t)
Se puede ver que estamos considerando unos volúmenes muertos en los cilindros,debido a que los volúmenes no llegan a anularse, sino que existe un volúmen mínimono nulo, por una parte, y estamos considerando el volumen asociado al regeneradorpor otra parte.

CAPÍTULO 7. MODELO DE FUNCIONAMIENTO TÉRMICO DEL MOTOR 129
Figura 7.10: Desfase en el movimiento de los émbolos
•
Ciclo Stirling Ideal y modelizado del ciclo real: El ciclo ideal Stirling se basa encuatro transformaciones termodinámicas: Expansión Isoterma, Expansión a volu-men constante (isócora) (lo que físicamente ocurre es una cesión de calor a volumenconstante), Compresión Isoterma y Adición de calor a volumen constante lo que serepresenta por una compresión isócora. Como sabemos que nuestro motor no va aseguir exactamente un ciclo ideal Stirling, hemos modelizado los procesos de unaforma que se asemeja mejor a la realidad; hemos supuesto un modelo de compresi-bilidad en los cilindros donde se produce la carga y hemos supuesto una evoluciónintermedia entre una isoterma y una adiabática en los cilindros donde se produce ladescarga; estos dos modelos, dado que estamos en una etapa de diseño preliminar,los hemos supuesto lineales con el tiempo, para evaluar una primera aproximacióny ver como interactúan los distintos parámetros, y en etapas sucesivas de diseñodetallado se evaluará una aproximación de mayor orden.
7.1.4. CICLO TERMODINÁMICO STIRLING
Se pasa ahora a describir las diferentes consideraciones acerca del ciclo termodinámicoStirling:
Un ciclo termodinámico es un conjunto de procesos termodinámicos transfiriendocalor y trabajo, mientras varía la presión, temperatura y otras variables de estado, final-mente volviendo al estado inicial en el que se encontraba el sistema.
El ciclo Stirling es reversible, lo que significa que si se aplica trabajo mecánico, lamáquina puede funcionar como bomba de calor o como máquina refrigeradora, e incluso
Generador Solar de Ciclo de Aire

130 7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR
Figura 7.11: Ciclo termodinámico Ideal del motor Stirling
como máquina criogénica. El ciclo se define como un ciclo cerrado regenerativo con unfluido de trabajo gaseoso. El término “Regenerativo” se refiere a que usa un cambiadorde calor interno llamado Regenerador que hace incrementar el rendimiento térmico deldispositivo.
CICLO IDEAL STIRLING: En un motor de ciclo Stirling los componentes interac-túan entre sí para producir cuatro procesos termodinámicos. Estos procesos se describena continuación y se pueden ver en el diagrama presión-volumen del ciclo y en el diagramatemperatura-entropía que se presenta a continuación:
Figura 7.12: Diagramas presión-volumen y temperatura-entropía del ciclo Stirling
Expansión Isoterma: El fluido a alta presión absorbe calor en el cilindro calien-te (cilindro de potencia) por medio del regenerador y se expande a temperaturaconstante, realizando trabajo en el propio cilindro de potencia.
Expansión Isócora: El émbolo del cilindro de compresión transfiere todo el gas avolumen constante a través del regenerador hacia el lado frío del motor, que es elpropio cilindro de compresión. El calor se absorbe del gas mientras pasa a través delregenerador, disminuyendo la temperatura del gas en su paso por el regenerador.

CAPÍTULO 7. MODELO DE FUNCIONAMIENTO TÉRMICO DEL MOTOR 131
Según se disminuye la temperatura del gas, de la misma forma baja la presión delmismo.
Compresión Isoterma: El pistón del cilindro de potencia realiza trabajo compri-miendo el gas a temperatura constante, a la temperatura baja del cilindro de com-presión, reprimiendo por tanto el calor al cilindro de compresión (por medio delregenerador). Debido a que el gas está a baja temperatura, se necesita menos tra-bajo para la compresión que el trabajo obtenido en la primera transformación, enla que las presiones eran mucho mayores. Por tanto el ciclo tiene un trabajo netode salida.
Compresión Isócora: El émbolo del cilindro de compresión desplaza todo el fluidode trabajo a volumen constante a través del regenerador hacia la parte caliente delmotor. El calor es entregado al gas según pasa por el regenerador, incrementando,por tanto la temperatura del fluido hasta alcanzar la temperatura de la fuentetérmica de alta temperatura. Según se incrementa la temperatura, la presión delgas aumenta significativamente, y el sistema vuelve a sus condiciones iniciales.
A continuación se puede ver en el diagrama una comparación entre los diagramas de losciclos ideales de Otto, Ericsson y Stirling:
Figura 7.13: Comparación de los ciclos termodinámicos ideales de Otto, Ericsson y Stir-ling
CICLO SCHMIDT: El ciclo descrito por Schmidt se ha convertido en el ciclo idealStirling clásico cuando se realiza el análisis de los mismos. Considerando el modelo idealisotermo de un motor Stirling, tenemos que la principal hipótesis del análisis es queel gas en el volumen donde se realiza la expansión y la adición de calor se encuentra
Generador Solar de Ciclo de Aire

132 7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR
constantemente a la temperatura de la fuente térmica de alta temperatura y el gascontenido en el volumen donde se produce la compresión y la cesión de calor se encuentraconstantemente a la temperatura de la fuente térmica de baja temperatura. Esta hipótesishace posible obtener una solución simplificada de la presión del fluido de trabajo comofunción de las variaciones de volumen. Esta expresión se puede emplear para investigarcomo afectan los diferentes mecanismos a la potencia de salida. Para obtener una serie deexpresiones cerradas, Schmidt supone que los volúmenes de los cilindros varían de formasenoidal con el tiempo.
Figura 7.14: Modelo Isotermo Ideal
La hipótesis de que los volumenes de trabajo y los cambiadores de calor operansegún isotermas implica que los cambiadores de calor, incluyendo el regenerador tienenrendimiento unidad y por tanto son ideales, con una distribución espacial de temperaturaslineal. Esto da lugar a una conclusión paradójica en la que ni los volúmenes para la cesiónni para la adición de calor contribuyen a la transferencia de calor, y toda la transferenciade calor se produce a través de las fronteras de los volúmenes de trabajo consideradoscomo isotérmicos; lo que no puede ser correcto, porque las paredes de los cilindros noestán hechas para conducir el calor. En las máquinas reales, los volúmenes de trabajo,típicamente los cilindros, tenderán a ser adiabáticos en lugar de isotermos, lo que implicaque el calor neto transferido en todo el ciclo debe provenir de los cambiadores de calor. Portanto consideramos aquí un modelo ideal alternativo para los motores de ciclo Stirling,el Modelo Adiabático Ideal.
MODELO ADIABÁTICO IDEAL: Ahora, los volúmenes donde se producen la com-presión y la expansión son adiabáticos, en los que no se transfiere calor a los alrededores.Ahora la temperatura en los volúmenes en los que se producen la compresión y la ex-pansión no son constantes, sino que varían a lo largo de todo el ciclo de acuerdo con lacompresión y expansión adiabática que ocurre en su interior. En el modelo ideal no hay
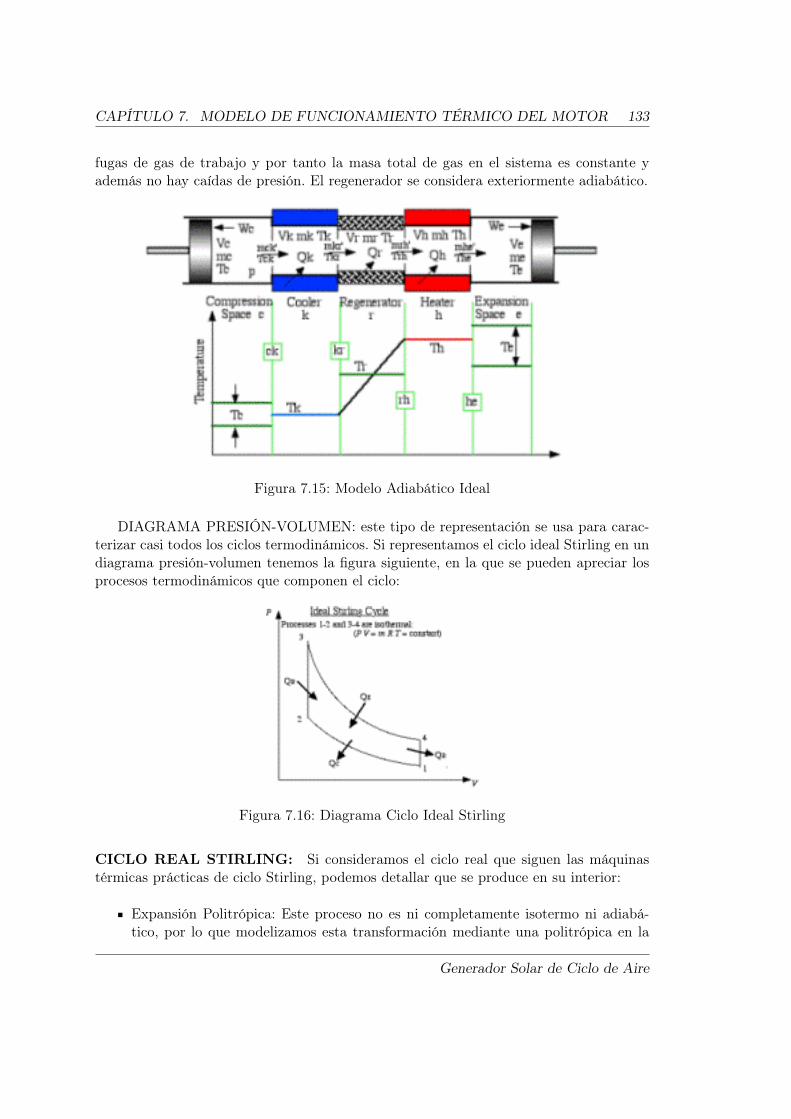
CAPÍTULO 7. MODELO DE FUNCIONAMIENTO TÉRMICO DEL MOTOR 133
fugas de gas de trabajo y por tanto la masa total de gas en el sistema es constante yademás no hay caídas de presión. El regenerador se considera exteriormente adiabático.
Figura 7.15: Modelo Adiabático Ideal
DIAGRAMA PRESIÓN-VOLUMEN: este tipo de representación se usa para carac-terizar casi todos los ciclos termodinámicos. Si representamos el ciclo ideal Stirling en undiagrama presión-volumen tenemos la figura siguiente, en la que se pueden apreciar losprocesos termodinámicos que componen el ciclo:
Figura 7.16: Diagrama Ciclo Ideal Stirling
CICLO REAL STIRLING: Si consideramos el ciclo real que siguen las máquinastérmicas prácticas de ciclo Stirling, podemos detallar que se produce en su interior:
Expansión Politrópica: Este proceso no es ni completamente isotermo ni adiabá-tico, por lo que modelizamos esta transformación mediante una politrópica en la
Generador Solar de Ciclo de Aire

134 7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR
Figura 7.17: Diagrama presión-volumen y las isotermas asociadas
que variamos linealmente con el tiempo el exponente de la transformación paraconsiderar un modelo más realista.
Cesión de calor a volumen prácticamente constante, o Expansión Isócora: El volu-men total que ocupa el fluido de trabajo durante este proceso no es exactamenteconstante, pero varía muy ligeramente, debido a la forma senoidal de los movimien-tos de los émbolos de potencia y compresión, respectivamente.
Compresión Politrópica: Como en el caso anterior consideramos una transformaciónintermedia entre la isoterma y la adiabática mediante una politrópica de exponentelinealmente variable con el tiempo para suponer un modelo más realista.
Adición de calor a volumen constante, o compresión Isócora: Igual que antes sabe-mos que el volumen no es exactamente constante por la cinemática de los émbolos,pero la transformación se asemeja mucho a la ideal.
Si representamos el diagrama presión-volumen del ciclo real Stirling vemos que, comoresultado de las variaciones senoidales de los volumenes de los cilindros debidas a lacinemática de los respectivos émbolos, tenemos que el diagrama tiene una forma muyaproximada a una elipse; lo que implica una representación más realista del ciclo quesiguen las máquinas de ciclo Stirling reales:

CAPÍTULO 7. MODELO DE FUNCIONAMIENTO TÉRMICO DEL MOTOR 135
Figura 7.18: Diagrama presión-volumen del ciclo real Stirling
Si analizamos otras magnitudes termodinámicas del ciclo que sigue el motor, tenemos:
MOVIMIENTO DEL FLUIDO DE TRABAJO: El siguiente diagrama muestra cómoes el flujo a través de todo el motor Stirling. Las líneas verticales coloreadas delimitanlos volúmenes donde ocurren los distintos procesos en el motor. De izquierda a derechason:
Generador Solar de Ciclo de Aire

136 7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR
Figura 7.19: Flujo másico a través del motor
Volumen barrido en la expansión por el pistón de potencia
Tolerancia al volumen de expansión, que previene de que el pistón no haga contactocon el cambiador de calor
El volumen donde se produce la adición de calor
El regenerador
El volumen donde ocurre la cesión de calor
La tolerancia del volumen de la cesión de calor para no interferir con el pistón decompresión
El volumen barrido en la compresión por el pistón de compresión
CAIDA DE PRESIÓN EN EL CAMBIADOR DE CALOR: También conocidas comopérdidas por bombeo, son debidas a las pérdidas por viscosidad en el flujo a través delregenerador. La línea roja representa la adición de calor, la verde es el regenerador y laazul es la cesión de calor. Para diseñar apropiadamente los cambiadores de calor, es nece-saria una optimización multivariable (realizable mediante multiplicadores de Lagrange,por ejemplo) para obtener suficiente transferencia de calor con unas pérdidas aceptables.Las pérdidas en el flujo aquí mostradas son relativamente bajas, y son apreciables enel diagrama que se muestra a continuación, que representa las variaciones globales depresión en todo el ciclo:

CAPÍTULO 7. MODELO DE FUNCIONAMIENTO TÉRMICO DEL MOTOR 137
Figura 7.20: Diagrama de caída de presión en el cambiador de calor
PRESIÓN-ÁNGULO GIRADO POR EL CIGÜEÑAL: El diagrama que se muestracorresponde a un análisis adiabático, con cambiadores de calor no ideales. Obsérvese quela caída de presión a través del regenerador es muy baja en comparación con la variaciónde la presión global a lo largo de todo el ciclo.
Generador Solar de Ciclo de Aire

138 7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR
Figura 7.21: Diagrama de presión-ángulo girado por el cigüeñal
TEMPERATURA-ÁNGULO GIRADO POR EL CIGÜEÑAL: La siguiente figuramuestra las propiedades de un análisis adiabático en un cambiador de calor real. Laslíneas rectas representan la temperatura de la porción de sólido de cambiador de calor,y las curvas son la temperatura del gas en los respectivos volúmenes. Las fluctuacionesde la temperatura del gas son debidas por los efectos de la compresión y expansiónadiabática del gas en el motor, junto con las condiciones de que el cambiador de calor noes ideal, es decir, que tiene un límite en la capacidad de transferencia de calor. Cuandola temperatura del gas difiere de la temperatura del cambiador de calor, se producenpérdidas que se denominan pérdidas de transferencia de calor o pérdidas de histéresis. Sinembargo, los intercambiadores de calor incluso trabajan de forma aceptable en términosque permiten que el ciclo real sea efectivo, incluso si el rendimiento térmico actual de lossistemas es solo la mitad de su límite teórico.

CAPÍTULO 7. MODELO DE FUNCIONAMIENTO TÉRMICO DEL MOTOR 139
Figura 7.22: Diagrama temperatura-ángulo girado por el cigüeñal
ENERGÍA TÉRMICA (CALOR) Y MECÁNICA (TRABAJO) ACUMULADA: Elsiguiente diagrama representa los datos de un motor Stirling tipo Alfa, donde Q se refiereal calor, o energía térmica, y W denota el trabajo, o energía mecánica. La línea azul depuntos muestra el trabajo de salida del volumen donde ocurre la compresión. A medidaque la curva se hace más negativa, el trabajo se hace sobre el gas a medida que secomprime. Durante la expansión, una parte del trabajo se hace sobre el émbolo, como semuestra en el trazo positivo de la curva. Al final del ciclo, éste valor es negativo, indicandoque la compresión realizada por el pistón requiere una cantidad neta de trabajo. La líneacontínua azul muestra el flujo de calor que abandona el cambiador de calor en donde seproduce la cesión de calor al exterior. Nótese que el calor del volumen donde se producela cesión de calor y el trabajo del pistón que comprime el gas tienen el mismo ciclode energía. Esto es consistente con la transferencia de calor nula hacia el regenerador,representada mediante el trazo contínuo de color verde. Como era de esperar, tanto laadición de calor como el volumen donde ocurre la expansión tienen un flujo positivo deenergía. La línea negra punteada muestra el trabajo neto de salida del ciclo. En estetrazo, el final del ciclo está más alto que el inicio, lo que significa que el motor térmicoconvierte energía térmica en trabajo mecánico.
Generador Solar de Ciclo de Aire

140 7.1. MODELO DEL FUNCIONAMIENTO TÉRMICO DEL MOTOR
Figura 7.23: Diagrama de calor y trabajo acumulado en el ciclo

Capítulo 8
Modelo de funcionamiento mecánicodel motor
En esta sección se llevarán a cabo las siguientes tareas:
Diseño del mecanismo-Estudio y diseño previo de partes móviles del motor.*Descripción de la dinámica de las piezas y relaciones con los puntos de contacto.*Planteamiento de ecuaciones diferenciales del movimiento.-Descripción paramétrica de elementos mecánicos del motor.
Diseño del émbolo-biela. -Estudio y diseño de posibles geometrías y articulacionesdel conjunto émbolo-biela.-Definición de parámetros, variables y servidumbres.
El objetivo de esta sección es obtener un modelo mecánico completo de nuestro motor.Dicho modelo (o modelos) nos permitirá estudiar el comportamiento del mismo en funciónde varios parámetros de diseño. Dicho estudio servirá para realizar la optimización dedichos parámetros, y en última instancia para fijar el diseño del mecanismo del motor.Así pues, expondremos en primer lugar el mecanismo seleccionado para nuestro motor ydescribiremos su funcionamiento. Posteriormente realizaremos un modelo simplificado delmismo que nos permitirá parametrizar el diseño. Dicho modelo nos permitirá realizar elestudio cinético y cinemático previo al estudio dinámico. Todo esto nos llevará finalmentea la obtención de nuestro modelo mecánico que usaremos a la hora de realizar nuestrodiseño detallado.
8.1. Selección del mecanismo del motor
El objetivo del mecanismo del motor no es otro que el de transformar el movimientolineal alternativo que tienen los émbolos como consecuencia del ciclo termodinámico enun movimiento rotatorio. Dicha transformación es necesaria para poder aprovechar laenergía liberada en el ciclo termodinámico para la producción de energía eléctrica ya que
141

142 8.1. SELECCIÓN DEL MECANISMO DEL MOTOR
los generadores de energía eléctrica necesitan dicho movimiento.Para realizar dicha transformación se han inventado infinidad de mecanismos, desde losmás tradicionales como puedan ser la biela-manivela; hasta otros mucho más sofisticadosy complejos. En la figura 8.1 puede verse un mecanismo de biela manivela.Para nuestro diseño se ha optado por utilizar un innovador cigüeñal hipocicloidal en
Figura 8.1: Mecanismo de biela-manivela
vez de un diseño más tradicional de biela-manivela. Dicho mecanismo se basa en unapropiedad geométrica de las hipocicloides. Las hipocicloides son las curvas que describeun punto de una circunferencia que rueda sin deslizar dentro de otra. En función de larelación de radios entre la circunferencia exterior y la interior tendremos varias curvas.En la figura 8.2 puede verse la construcción de una familia de hipocicloides.Como puede verse en la figura aquella en la que la relación entre los radios es igual a 2,la hipocicloide se transforma en una recta. Es fácil darse cuenta que esta propiedad nospermite transformar el movimiento alternativo del émbolo a lo largo de dicha recta, enun movimiento circular, que es el que describe el centro de la circunferencia interior.Este mecanismo presenta una serie de ventajas frente al mecanismo de biela-manivela.
Reducción de la fricción pistón camisa. Al describir el émbolo una recta no necesitaapoyarse sobre la camisa del cilindro para mantener su trayectoria, lo que reducela fricción entre ambos y por tanto las pérdidas mecánicas.
Reducción de las vibraciones. Debido también a que el émbolo describe una recta.
Figura 8.2: Familia de hipocicloides

CAPÍTULO 8. MODELO DE FUNCIONAMIENTO MECÁNICO DEL MOTOR 143
Esto permite un mejor equilibrado del motor al situar el centro de masas del émboloy uno de sus ejes de inercia sobre dicha recta, reduciendose las vibraciones.
Incremento del rendimiento mecánico del sistema. Como consecuencia de la reduc-ción de la fricción pistón-camisa y del menor número de piezas que conforman elmecanismo.
Esto se consigue sin aumentar el volumen total del motor, y sin aumentar las fuerzasde inercia del mismo. Es decir sin un incremento de peso. Su única limitación es surestricción a dos cilindros, lo que en nuestro caso no supone un problema ya que es elnúmero de cilindros requerido para nuestro motor.A pesar de que este tipo de mecanismo es bien conocido desde hace mucho (las máquinas
Figura 8.3: Maquina de vapor de Murray dotada de cigüeñal hipocicloidal
de vapor Murray ya lo usaban a mediados del siglo XIX.); no se ha usado ampliamentedebido a que no es aplicable a motores de combustión interna. Esto se debe a que endichos motores se produce una percusión en el momento de la ignición del combustible queeste mecanismo no puede soportar. Sin embargo, los motores de ciclo de aire presentanun funcionamiento mucho más regular (al igual que las máquinas de vapor) por lo queesta clase de mecanismo si puede usarse. En la figura 8.3 podemos ver una máquina devapor equipada con este mecanismo.Vamos ahora a modelizar dicho mecanismo para poder analizarlo mecánicamente.
8.2. Modelización y parametrización del mecanismo
Pretendemos realizar un modelo simplificado del mecanismo para poder parametri-zarlo. Dicha parametrización nos permitirá analizar la influencia de ciertas característicasen el comportamiento del motor. A su vez dicho análisis nos permitirá optimizar nuestro
Generador Solar de Ciclo de Aire

144 8.2. MODELIZACIÓN Y PARAMETRIZACIÓN
3
3'
4'
7'
5'
54
7
2
2'
6
0
0'E
E'
D
D'
C
S
Figura 8.4: Partes del modelo del mecanismo y denominación
diseño.El modelo del mecanismo del motor puede verse representado en la figura 8.4. Esta com-puesto por seis sólidos rígidos: un cigüeñal C, dos ruedas dentadas D y D’, dos émbolosE y E’ y el soporte S. Cada uno de estos sólidos esta formado a su vez por varias partesrígidamente unidas entre si.Las dos ruedas dentadas (D y D’) estan formadas por dos discos 3 y 3’. Dichos discosposeen dos contrapesos 8 y 8’ situados a una distancia l8 de su centro(dichos contrapesosserán considerados masas lineales) y estan unidos rígidamente a dos cilindros 4 y 4’ queefectuan la unión entre ambos discos y el cigüeñal.El cigüeñal esta compuesto por dos brazos 5 y 5’ (girados un ángulo β entre si), un ejecilíndrico 6, y dos contrapesos 7 y 7’ (que consideraremos como masas puntuales).Por último el soporte; formado por las coronas 2 y 2’ de diametro el doble que el de losdiscos 3 y 3’, y los cilindros 0 y 0’ donde se alojan los dos émbolos 1 y 1’.Todos estos elementos están unidos entre si mediante ligaduras mecánicas adecuadas. Asílos émbolos se unen a los discos en los puntos P y P’, los discos D y D’ se unen al cigüeñalen los puntos Q y Q’ y esté se une al soporte en el punto O. A su vez los émbolos 1 y 1’se alojan en los cilíndros 0 y 0’, y los discos 3 y 3’ ruedan en el interior de las coronas 2y 2’. La modelización de todas las ligaduras y uniones mecánicas existentes será tratadamás adelante.Sobre la figura 8.5 se han detallado también los principales parámetros geométricos y

CAPÍTULO 8. MODELO DE FUNCIONAMIENTO MECÁNICO DEL MOTOR 145
5
19
l6
l4
e3
lEg
7,21
hEg
10d4
10d6
R6
R 50R
14,47
l790°
l8
ß
d2/2
Figura 8.5: Principales parámetros geométricos del mecanismo
másicos que intervienen. Son los siguientes:
ρ densidad del material.
R Radio de las coronas y diametros de los discos.
l4 y d4 longitud y diametro de los cilindros 4 y 4’.
l6 y d6 longitud y diámetro del eje del cigüeñal 6.
m7 y l7 masa y distancia al eje de los contrapesos 7 y 7’.
d2 diametro de los abultamientos de los discos 3 y 3’.
e3 espesor de los discos y las coronas 2, 2’, 3, 3’.
m1 y d1 masa y diametro de los émbolos 1 y 1’.
lEg y hEg distancias longitudinal y vertical de los centros de masas de los émbolosa los puntos P y P’.
α area característica de la sección transversal de los brazos del cigüeñal 5 y 5’.
m8 y l8 masa y distancia al eje del disco de los contrapesos 8 y 8’.
β ángulo entre los brazos del cigüeñal.
Tenemos en total 18 parámetros geométricos y másicos que influiran sobre las caracterís-ticas másicas del mecanismo, y por tanto sobre la dinámica del mismo. Pasamos ahoraa analizar la cinématica del sistema y a obtener las características cinéticas del mismo.Dicho análisis es el paso previo al planteamiento de las ecuaciones dinámicas del mismo.
Generador Solar de Ciclo de Aire

146 8.3. CARACTERÍSTICAS MÁSICAS
8.3. Determinación de las características másicas del meca-nismo (masas y tensores de inercia)
Una vez elaborado y parametrizado el modelo del mecanismo, pasamos ahora a de-terminar las características másicas de cada pieza del mecanismo. Dichas características(masas, posiciones de los centros de masas y tensores de inercia) serán función de losparámetros definidos anteriormente y tendrán una gran influencia en la mecánica delsistema.
8.3.1. Cigüeñal (C)
20,41
l6
R/2
Cg
zc
xcyc
d6
l7
Figura 8.6: Sistemas de referencia y principales parámetros geométricos del cigueñal
Masa La masa del cigüeñal viene dada por: mC = ραR+ ρπ l6d62
4 + 2m7
Centro de masas Denominaremos a dicho punto como Cg. Determinaremos su po-sición en el sistema de referencia c de la figura 8.6 de ejes xc, yc, zc fijos al cigüeñal yorigen en el punto central del eje situado en el plano medio del cigüeñal.En estos ejes la posición del centro de masas viene dada por el vector:
~xCg =
(αρR
2
8 −m7l7
)(1 + cosβ)
mC~zc +
(αρR
2
8 −m7l7
)sinβ
mC~xc (8.1)
Se observa como el centro de masas esta contenido en el plano medio del cigüeñal1.1En la figura 8.6 hemos representado el caso particular en el que el cigüeñal esta equilibrado estáti-
camente. Posteriormente comentaremos que quiere decir esto

CAPÍTULO 8. MODELO DE FUNCIONAMIENTO MECÁNICO DEL MOTOR 147
Tensor de inercia Para la determinación del tensor de inercia del cigüeñal tomaremosun sistema de referencia con origen en el centro de masas (Cg) y fijo al mismo al quedenominaremos c y que puede verse en la figura 8.6. Las componentes del mismo endichos ejes son:
IyC =ρπl6d6
4
32+ 2m7l7
2 + ραR3
12
IxC =ρπ(d6
4l664
+d6
2l63
48
)+ ρα
R(l62 +R2/3)8
+m7
(l6
2
4+ l7
2
)+m7
(l6
2
4+ l7
2 cos2 β
)+ ρα
R(l62 + R2
3 cos2 β)8
IzC =ρπ(d6
4l664
+d6
2l63
48
)+ ρα
Rl62
8+m7
l62
4+m7
(l6
2
4+ l7
2 sin2 β
)+ ρα
R(l62 + R2
3 )8
JxyC =−m7l6l72
sinβ + ραl6R
2
16sinβ
JxzC =−m7l72 sinβ cosβ − ραR
3
24cosβ sinβ
JyzC =m7l6l72− ραl6R
2
16+m7
l6l72
cosβ − ραl6R2
16cosβ
El tensor de inercia queda:
¯IC =
IyC −JxyC −JxzC−JxyC IyC −JyzC−JxzC −JyzC IzC
8.3.2. Discos (D y D’)
Masa la masa de ambos discos vale2: mD ' mD′ ' ρπe3R2+d2
2/24 +m8
Centro de masas Denominaremos a dicho centro de masas como Dg. Determinaremosla posición del mismo en el sistema de referencia d1 de la figura 8.7. En él la posición delcentro de masas viene dada por:
~xDg =ρπ
d42l248 − e3
2
(π e3d2
2
8 +mD + ρπR2e34
)mD
~yd +ρπ e3d
2
8
(R2 + 2d2
3π
)−m8l8
mD~zd (8.2)
En este punto definiremos un nuevo sistema de referencia d paralelo al anterior como2Se usa el símbolo de aproximado ya que se han realizado algunas simplificaciones en el cálculo. Dichas
simplificaciones son aceptables mientras d2 << R. De aquí en adelante supondremos que la aproximaciónes exacta y usaremos el símbolo = en vez de '
Generador Solar de Ciclo de Aire

148 8.3. CARACTERÍSTICAS MÁSICAS
lDg
zdzd1
xd
xd1ydyd1
l4
O 10
e3
R/2
d4
d2/2
Dg
Figura 8.7: Sistemas de referencia y principales parámetros geométricos de los discos
puede verse en la figura y respecto del cual expresaremos el tensor de inercia de losdiscos D y D’.3
Tensor de inercia Si expresamos sus componentes en los ejes d tenemos:
IyD =ρπ
32
(l4d4
2 + e3R4 +
e3d24
2+ e3R
2d22
)+m8l8
IzD =ρπ
4
(d2
2l4
(d4
2
16+l4
2
3
)+R2e3
(R2
16+e3
2
3
)+d2
2e3
2
(d2
2
16+e3
2
3
))IxD =
ρπ
4
(d2
2l4
(d4
2
16+l4
2
3
)+R2e3
(R2
16+e3
2
3
)+d2
2e3
2
(d2
2
16+e3
2
3+R2
4
))+m8
(e3
2
3+ l8
2
)JyzD =m8l8(e3/2 + lGD)− ρπd
22e3
8
(e3
2+ lGD
)(R2
+4d2
6π
)JxyD =JxzD = 0
3En la figura 8.7 hemos representado el caso en el que el disco esta equilibrado estáticamente. Poste-riormente comentaremos que quiere decir esto y el significado del parámetro lDg

CAPÍTULO 8. MODELO DE FUNCIONAMIENTO MECÁNICO DEL MOTOR 149
El tensor de inercia queda:
¯ID = ¯ID′ =
IyD 0 00 IyD −JyzD0 −JyzD IzD
8.3.3. Embolos (E y E’)
xe
ye
xe
P
Eg
d1
hEglEg
Figura 8.8: Sistemas de referencia y principales parámetros geométricos de los émbolos
Masa la masa de ambos discos vale: mE = m1
Centro de masas La posición del mismo viene dada por los parámetros lEg y hEg,que son las distancias horizontal y vertical de dicho centro de masas al punto P (o P’ enel émbolo E’). Ambos parámetros pueden verse en la figura 8.8
Tensor de inercia Expresaremos sus componentes en los ejes e de la figura 8.8 ten-dremos:
¯IE = ¯IE′ =
IyE 0 00 IyE 00 0 IzE
Generador Solar de Ciclo de Aire

150 8.4. EQUILIBRADO ESTÁTICO Y DINÁMICO DEL MECANISMO
8.4. Equilibrado estático y dinámico del mecanismo
Un aspecto importante en el diseño de cualquier mecanismo con movimiento rotatoriocomo el nuestro, es el equilibrado del mismo. En la sección anterior hemos desarrolladolas expresiones de las características másicas de cada pieza con toda generalidad. Nosinteresa ahora, a partir de las expresiones anteriores obtener las condiciones necesariaspara equilibrar el mecanismo.El objetivo de los contrapesos situados en los discos y en el cigüeñal no es otro que poderrealizar dicho equilibrado. Entendemos por equilibrado el proceso mediante el cual elimi-namos ciertas componentes de las fuerzas de inercia en mecanismos que giran alrededorde un eje, lo que reduce las vibraciones y la magnitud de las reacciones que se ejercensobre el sistema. Tenemos dos clases de equilibrado: estático y dinámico. El primero con-siste en situar el centro de masas de la pieza en el eje de giro de la misma; el segundoen que dicho eje de giro coincida con un eje principal de inercia. Estas dos condicionesse traduciran en ecuaciones matemáticas que nos servirán para determinar los valores delos parámetros de los contrapesos m8, l8, m7 y l7.
8.4.1. Equilibrado del cigüeñal
La posición del centro de masas del cigueñal viene dada por la ecuación (8.1). Paraque el centro de masas se situe sobre el eje de giro dicha ecuación ha de igualarse a 0. Silo hacemos obtenemos la siguiente ecuación:
m7l7 = αρR2
8
En cuanto al equilibrado dinámico, para que el eje yc sea principal de inercia es necesarioque los dos productos de inercia JxyC y JyzC sean nulos. Esto nos proporciona dos nuevasecuaciones:
−m7l6l72
sinβ + ραl6R
2
16sinβ = 0
m7l6l72− ραl6R
2
16+m7
l6l72
cosβ − ραl6R2
16cosβ = 0
que simplificadas adecudamente proporcionan:
m7l7 = αρR2
8(m7l7 − αρ
R2
8
)(1 + cosβ) = 0
Vemos que ambas se verifican si se verifica la ecuación de equilibrado estático; tenemospor tanto una única condición para dos parámetros, lo que nos deja un grado de libertaden la elección de los contrapesos.

CAPÍTULO 8. MODELO DE FUNCIONAMIENTO MECÁNICO DEL MOTOR 151
8.4.2. Equilibrado de los discos
Como ya vimos la posición del centro de masas viene dada por la ecuación (8.2). Vemospara equilibrar estáticamente los discos D y D’ (es decir que su centro de gravedad seencuentre sobre el eje de giro) se ha de verificar que:
m8l8 = ρπd2
2e3
8
(R
2+
2d2
3π
)Lo que nos impone una condición sobre el contrapeso. Si dicha condición se cumplepodemos expresar la posición del centro de masas respecto al sistema de referencia d1
como:~xDg = lDg ~yd
donde lDg =ρπ d4
2l42
8 − e32
(π e3d2
2
8 +mD + ρπR2e34
)mD
Para equilibrar dinámicamente el disco tenemos que conseguir que el producto de inerciaJyzD sea nulo, lo que nos proporciona una segunda ecuación que junto con la anteriornos permite determinar m8 y l8. Esa ecuación es:
m8l8(e3/2 + lDg)− ρπd2
2e3
8
(e3
2+ lDg
)(R2
+4d2
6π
)= 0
que simplificada queda:
m8l8 = ρπd2
2e3
8
(R
2+
2d2
3π
)Condición idéntica a la del equilibrado estático. Como ns sucedia anteriormente tenemosuna única condición sobre los contrapesos de los discos para su equilibrado tanto estáticocomo dinámico. En la mayoría de ocasiones supondremos que el mecanismo esta equili-brado estáticamente y por lo tanto dinámicamente. En este caso los tensores de inerciaserán:
¯IC =
IyC 0 00 IyC 00 0 IzC
¯ID = ¯ID′ =
IyD 0 00 IyD 00 0 IzD
8.5. Análisis cinemático
Una vez realizada la modelización del mecanismo, se procederá a estudiar la cine-mática del mismo; es decir las trayectorias y movimientos de las distintas partes que locomponen. Ya hemos comentado que este mecanismo se basa en el movimiento de undisco que rueda sin deslizar en el interior de otro. Dicha rodadura se produce por larotación del disco alrededor de su eje.
Generador Solar de Ciclo de Aire

152 8.5. ANÁLISIS CINEMÁTICO
P
Q
Figura 8.9: Trayectorias de los puntos P y Q (P’ y Q’)
En nuestro caso los discos D y D’ rotan alrededor de su eje (yd e y′d) y ruedan sin deslizaren el interior de las coronas 2 y 2’ que pertenecen al soporte del motor y están fijas enel mismo. Esto nos permite obtener la trayectoria de cualquier punto de dichos discos.En particular estamos intersados en las trayectorias de los puntos P y Q (o P’ y Q’).Dichas trayectorias pueden verse representadas en la figura 8.9. Puesto que el mecanismoes simétrico solo se ha represantado un lado del mismo, ya que el otro es idéntico.Se observa como la trayectoria del punto Q es una circunferencia de diametro R (la mitadque el de la corona). El cigüeñal se une al disco en el punto Q (Q’) a traves del brazo5 (5’), dicho brazo actua como una manivela sobre el cigüeñal tranasformando el movi-miento circular de dicho punto en un movimiento rotacional puro del cigüeñal.En cuanto al punto P (P’) se observa que describe un movimiento rectilineo alternativo.Al estar el émbolo E (E’) unido al disco en dicho punto, dicho movimiento se transfiereal émbolo (en realidad es el émbolo el que transfiere el movimiento al disco).Resumiendo cada una de las partes del mecanismo posse los siguientes movimientos.
Cigüeñal: Movimiento de rotación puro alrededor del eje.
Discos D y D’: Movimiento de traslación circular y movimiento de rotación alre-dedor del eje.
Embolos E y E’: Movimiento de traslación rectilineo alternativo.
A partir de esta descripción es fácil seleccionar las coordenadas generalizadas que defi-nen el movimiento del sistema, las cuales serán fundamentales a la hora de plantear las

CAPÍTULO 8. MODELO DE FUNCIONAMIENTO MECÁNICO DEL MOTOR 153
28,72
θc
zp
θd
θd'155,2°
θc'
zp'
Cg=O
Figura 8.10: Coordenadas generalizadas empleadas en la deducción de las ecuaciones
ecuaciones del sistema. Para definir dichas coordenadas se han usado varios sistemas dereferencia. En la figura 8.10 pueden verse tanto el sistema de referencia inercial como lascoordenadas generalizadas elegidas.Se ha tomado un sistema de referencia fijo inercial formado por los ejes x, y, z; con origenen el centro de masas del cigüeñal. Aparte de este se usarán los sistemas c y c’ con origenen el mismo punto pero que no son fijos sino que giran con el cigüeñal(el sistema c yafue usado para determinar el tensor de inercia). Además de estos tenemos los sistemas dy d’ con sus respectivos orígenes fijos en los centros de masas de los discos D y D’ y quegiran solidariamente con ellos, y que ya fueron usados para la determinación del tensorde inercia.Con los sistemas de referencia ya definidos podemos seleccionar las coordenadas genera-lizadas. El movimiento de rotación del cigüeñal vendrá dado por el ángulo θC (positivoen sentido antihorario) que es el ángulo que forma el brazo 5 del cigüeñal C con el ejez fijo. Dicho ángulo servirá también para describir la traslación del punto Q del discoD. Además usaremos el ángulo θC′ (positivo en sentido antihorario) para describir latraslación del punto Q’ del disco D’. Dicho ángulo es el ángulo que forma el brazo 5’con el eje z inercial. Para describir el movimiento de rotación alrededor de su eje de losdiscos usaremos los ángulos θD y θD′ que son respectivamente los ángulos que formanlos ejes zd y zd′ con el eje z fijo (positivos en sentido horario). Por último el movimientoalternativo de los émbolos lo describiremos mediante las coordenadas zP y zP ′ que sonla coordenada z de los puntos P y P’ respecto del sistema de referencia fijo.
Generador Solar de Ciclo de Aire

154 8.6. LIGADURAS DEL SISTEMA
Todas estas coordenadas generalizadas no son independientes sino que existen ciertasligaduras entre ellas que ahora vamos a detallar.
8.6. Ligaduras del sistema
Ligaduras geométricas La única ligadura geométrica que aparece es la siguiente:
θC′ = θC + β
debida a que el ángulo entre ambos brazos del cigüeñal es fijo.
Ligaduras cinemáticas El resto de ligaduras nos aparecen cuando imponemos que losdiscos D y D’ ruedan sin deslizar sobre la corona. Dicha ligadura puede escribirse como:
~vA = 0
y~vA′
= 0
siendo A y A’ los puntos de contacto entre disco y corona en cada instante. Aplicando elcampo de velocidades de los sólidos D y D’ obtenemos:
~vA =R
2( ˙θC cos θC − ˙θD cos θC)~x+
R
2( ˙θD sin θC − ˙θC sin θC)~z
~vA′
=R
2( ˙θC′ cos θC′)− ˙θD′ cos θC′)~x+
R
2( ˙θD′ sin θC′ − ˙θC′ sin θC′)~z
de donde se deduce:˙θC = ˙θD =⇒ θC = θD
˙θC′ = ˙θD′ =⇒ θC′ = θD′
Si ahora tomamos los puntos P y P’ y determinamos su velocidad tenemos:
~vP =R
2(( ˙θC cos θC − ˙θD cos θD)~x− ( ˙θC sin θC + ˙θD sin θD)~z)
~vP′
=R
2(( ˙θC′ cos θC′ − ˙θD′ cos θD′)~x− ( ˙θC′ sin θC′ + ˙θD′ sin θD′)~z)
Donde teniendo en cuenta la ligadura anterior vemos como la componente según x esnula. El punto P solo se desplaza en vertical (como ya sabiamos). Teniendo en cuentaesto se obtienen las siguientes ligaduras:
˙zP = −R ˙θC sin θC
˙zP ′ = −R ˙θC′ sin θC′
Ya tenemos todas las ligaduras.

CAPÍTULO 8. MODELO DE FUNCIONAMIENTO MECÁNICO DEL MOTOR 155
8.7. Cinética del mecanismo
Con todo lo anterior vamos a determinar las características cinemáticas y cinéticasde cada pieza que conforma el mecanismo en función de las coordenadas generalizadas yde las características másicas obtenidas anteriormente.
8.7.1. Cigüeñal (C)
Velocidad del centro de masas: ~vCg = 0
Velocidad angular: ~ωC = ˙θC~y
Momento cinético: ~HCgc = ¯IC~ωC = −JxyC ˙θC ~xc + IyC
˙θC ~jc − JyzC ˙θC ~zc
Energía cinética: TC = 12IyC
˙θC2
8.7.2. Disco D
Velocidad del centro de masas:
~vDg =R
2˙θC(cos θC~x− sin θC~z)
Aceleración del centro de masas:
~γDg = θCR
2(cos θC~x− sin θC~z)− ˙θC
2R
2(sin θC~x+ cos θC~z)
Velocidad angular:~ωD = − ˙θD ~yd
Momento cinético:
~HDgd = ¯ID ~ωD = −IyD ˙θD ~yd + JyzD
˙θD ~zd
Energía cinética:
TD =12mD
˙θC2R2
4+
12IyD
˙θD2
8.7.3. Disco D’
Velocidad del centro de masas:
~vD′g =
R
2˙θC′(cos θC′~x− sin θC′~z)
Aceleración del centro de masas:
~γD′g = ¨θC′
R
2(cos θC′~x− sin θC′~z)− ˙θC′
2R
2(sin θC′~x+ cos θC′~z)
Generador Solar de Ciclo de Aire

156 8.8. ANÁLISIS DINAMICO
Velocidad angular:~ωD′ = − ˙θD′ ~yd′
Momento cinético:
~HD′gd = ¯ID ~ωD = −IyD ˙θD′ ~yd′ + JyzD
˙θD′ ~zd′
Energía cinética:
TD =12mD
˙θC′2R2
4+
12IyD
˙θD′2
8.7.4. Émbolo E
Velocidad del centro de masas: ~vEg = ˙zP~z
Velocidad angular: ~ωE = 0
Momento cinético: ~HEg = 0
Energía cinética: TE = 12mE ˙zP 2
8.7.5. Émbolo E’
Velocidad del centro de masas: ~vE′g = ˙zP ′~z
Velocidad angular: ~ωE′ = 0
Momento cinético: ~HE′g = 0
Energía cinética: TE′ = 12mE ˙zP ′2
8.8. Análisis dinamico
La última fase en la elaboración del modelo mecánico del motor es el análisis de ladinámica del mismo. Una vez que ya hemos determinado todas las magnitudes requeridasen función de los parámetros geométricos y de las coordenadas generalizadas tomadasvamos finalmente a plantear las ecuaciones que nos determinan la dinámica del sistema.En primer lugar plantearemos las ecuaciones de Lagrange que nos permitiran obtener elmovimiento del sistema en función de las fuerzas exteriores de un modo simple. Posterior-mente plantearemos las ecuaciones en su forma newtoniana, a fin de poder determinartodas las reacciones y fuerzas de ligadura.

CAPÍTULO 8. MODELO DE FUNCIONAMIENTO MECÁNICO DEL MOTOR 157
8.8.1. Ecuaciones de Lagrange
La energía cinética de todo el sistema viene dada por:
T = TC + TD + TD′ + TE + TE′ =
12IyC
˙θC2
+12mD
˙θC2R2
4+
12IyD
˙θD2
+12mD
˙θC′2R2
4+
12IyD
˙θD′2
+12mE ˙zP 2 +
12mE ˙zP ′2
En esta ecuación podemos substituir las ligaduras para obtener una ecuación en funciónde una única coordenada generalizada (θC). Si lo hacemos tenemos:
T = ˙θC2(IyC/2 + IyD +mDR
2/4 +mER2/2(sin2 θC + sin2(θC + β)))
Las únicas fuerzas exteriores presentes son las fuerzas sobre los émbolos por lo que:
Qθc = R(FE sin θc + FE′ sin(θC + β))
Con lo que si ahora planteamos las ecuaciones de Lagrange ( ddt(∂T∂qj
)− ∂T
∂qj= Qj) obte-
nemos:
θc(IyC + 2IyD +mDR
2
2+mER
2(sin2 θC + sin2(θC + β)))
+ ˙θC2mER
2
2(sin 2θC + sin(2θC + 2β)) = R(FE sin θC + FE′ sin(θC + β)) (8.3)
Esta ecuación nos determina el movimiento del sistema en función de las fuerzas aplicadassobre los pistones.
8.8.2. Obtención de las reacciones y fuerzas internas
Gracias a las ecuaciones de Laplace hemos podido obtener la ecuación del movimientodel sistema de un modo simple. Sin embargo para dimensionar y diseñar el mecanismono solo es necesario conocer su movimiento, también las fuerzas y reacciones internasque se producen. Para obtenerlas ya no se puede recurrir a la formulación Lagrangiana,y habrá que emplear otros métodos, como puedan ser la formulación Newtoniana clásicao el método de Kane.No obstante antes de poder aplicar cualquier método de obtención de las ecuaciones esnecesario modelizar adecuadamente las ligaduras mecánicas del mecanismo. Hasta ahorasolo hemos modelizado la geometría y la cinemática del mecanismo sin preocuparnos delas uniones entre las distintas partes. Ahora necesitamos modelizar dichas uniones.Una primera consideración importante a la hora de modelizar y diseñar un mecanismo esel hiperestatismo. Dependiendo de como se realizen las ligaduras entre las distintas partesdel mecanismo se obtendrá un mecanismo isostático o hiperestático. En el primer casola suma del número de reacciones internas y grados de libertad del mecanismo es igualal número de ecuaciones mecánicas que se pueden plantear; por lo que podemos resolverel problema. En el segundo caso la suma del número de reacciones y grados de libertad
Generador Solar de Ciclo de Aire

158 8.8. ANÁLISIS DINAMICO
es mayor al número de ecuaciones y para resolver el problema será necesario obtenerecuaciones adicionales. Normalmente dichas ecuaciones se obtienen considerando uno omás solidos del sistema como elásticos en vez de rígidos, y planteando las ecuacioneselásticas correspondientes. Como es natural esto complica notablemente la resolución delproblema.Hay que hacer varias consideraciones sobre el hiperestatismo o isostatismo del sistema.En primer lugar un sistema hiperestático es por lo general más rígido que uno isostá-tico. Además en ciertos casos un sistema hiperestático puede tolerar la rotura de algúnelemento del mecanismo. Sin embargo las tolerancias de dichos mecanismos han de sermucho menores que las de uno isostático, lo que dificulta y encarece su fabricación ymontaje. Es responsabilidad del diseñador decidir optar por una u otra opción.Como ya hemos dicho, las ligaduras entre los componentes pueden modelizarse de dis-
1
Figura 8.11: Diversos tipos de ligaduras mecánicas con su representación normalizada
tintas formas. En la figura pueden verse algunos ejemplos de ligaduras representadassegún la norma UNE-EN ISO 3952 4. En función de las ligaduras elegidas se obtendrándistintos modelos (isostáticos o hiperestáticos)del mecanismo. Como ya hemos comenta-do la resolución del problema con ecuaciones puramente mecánicas solo es posible en elcaso de mecanismos isostáticos. En la fase de diseño detallado se procederá, por tanto, aplantear diversos modelos isostáticos del mecanismo para su estudio; a partir del cual sedeterminará el diseño del mecanismo.
4Para mas información respecto de la modelización y represantación de mecanismos consultar lacitada norma

Capítulo 9
Determinación del rendimientoglobal
9.1. PARTE TÉRMICA
9.1.1. TRABAJO REALIZADO PORUNMOTORDE CICLO IDEALSTIRLING
El trabajo neto de salida de un motor de ciclo ideal Stirling se puede evaluar consi-derando la integral de la presión en todo el volumen a lo largo de todo el ciclo:
W = −∮pdV
Esto se puede interpretar también como el área dentro de la curva presión-volumen alo largo de todo el ciclo, que es el área encerrada dentro del lazo en el mismo diagrama.
Para evaluar la integral solo necesitamos considerar el trabajo hecho durante losprocesos de expansión y compresión isotermos, porque no se realiza trabajo en las trans-formaciones isocóricas:
W = −
V2∫V1
p·dV +
V4∫p·dV
V3
Considerando la ecuación de estado: pV = mRT y destacando que la temperatura T esconstante para un proceso isotermo, m es constante para un ciclo cerrado, entonces laexpresión del trabajo realizado durante un proceso isotermo se puede formular como:
VB∫VA
pdV =
VB∫VA
mRT
VdV = mRT [lnV ]
VB
VA= mRT ln
(VBVA
)
con lo que sustituyendo una ecuación en la otra de las anteriores podemos evaluar la
159

160 9.1. PARTE TÉRMICA
Figura 9.1: Diagramas presión-volumen y temperatura-entropía para el ciclo termodiná-mico Stirling ideal
integral que nos proporciona el trabajo realizado a lo largo de un ciclo:
W = −[mRTH ln
(V2
V1
)+mrTL ln
(V4
V3
)]donde los subíndices (H) y (L) denotan las temperaturas alta y baja respectivamente.
Esta ecuación se puede simplificar aún más teniendo en cuenta que los volumenesV4 = V1 y V3 = V2 , con lo que la ecuación final para el trabajo es:
W = −mR ln(V2
V1
)(TH − TL)
El trabajo realizado representa la energía que sacamos del sistema, y por eso tienesigno negativo, de acuerdo al convenio de signos comúnmente empleado.
Analizando la expresión final del trabajo vemos que el trabajo de salida para unamáquina de ciclo Stirling se puede incrementar maximizando la diferencia de tempera-turas entre los extremos caliente y frío (TH − TL), la relación de compresiones,
(V2V1
), la
masa de gas encerrada en el sistema (y por tanto el volumen total de la máquina y/o lapresión media operativa del gas), o la constante específica del gas de trabajo.
Consideraciones de resistencia de materiales y límites térmicos de los materiales, asícomo otras consideraciones prácticas como el tamaño total de la máquina normalmentelimitan el incremento en la temperatura, presión y volumen. Sin embargo, es interesantedestacar que el trabajo específico de salida, (kJkg⇒Trabajo de salida por unidad de masadel sistema) se puede mejorar drásticamente en una máquina de ciclo Stirling simplementeutilizando un fluido de trabajo con una constante específica del gas muy elevada.

CAPÍTULO 9. DETERMINACIÓN DEL RENDIMIENTO GLOBAL 161
GAS CONSTANTE ESPECÍFICA DEL GAS R(
Jkg·K
)AIRE 319,3
AMONIACO 488,2DIÓXIDO DE CARBONO 188,9
HELIO 2077,0HIDRÓGENO 4124,2NITRÓGENO 296,8PROPANO 188,6
VAPOR DE AGUA 461,5
Cuadro 9.1: Constantes específicas de varios gases a T=300K
Una de las razones por las que se suele emplear hidrógeno y helio como fluido detrabajo en las máquinas de ciclo Stirling de cierta potencia se puede deducir por losvalores de las constantes de los gases mostrados en la tabla anterior. Otra razón es lapérdida escasa que se produce con los gases que están compuestos de moléculas muypequeñas.
9.1.2. FLUJO DE CALOR EN UN MOTOR DE CICLO STIRLINGIDEAL
El calor que fluye hacia el interior y hacia el exterior se puede evaluar considerandola integral de la temperatura con respecto a la entropía:
Q =∫TdS
Esto se puede visualizar como el área encerrada bajo las curvas de los procesos en eldiagrama temperatura-entropía.
Como las transferencias de calor isócoras a través del regenerador son completamenteinternas al ciclo, por ejemplo −Q2→3 = Q4→1 , entonces para evaluar los flujos de calorhacia el interior y el exterior del sistema simplemente tenemos que considerar los procesosisotermos.
Para el proceso de expansión isoterma en un ciclo cerrado (donde la temperatura Tes constante, y donde los subíndices (H) y (L) denotan las temperaturas isotermas altay baja respectivamente):
QH =
S2∫THdS
S1
esta integral se puede evaluar más fácilmente empleando el Primer Principio de la Ter-modinámica en la forma:
δQ = δU − δW
Generador Solar de Ciclo de Aire

162 9.1. PARTE TÉRMICA
pero como :δQ = TdS
yδW = −pdV
se puede escribirTdS = dU − (−pdV )
por lo que el flujo de calor durante el proceso de expansión isoterma se puede expresaren términos de un cambio en la energía interna y el volumen:
QH =
U2∫dU
U1
+
V2∫pdV
V1
y considerando la ecuación de estado: pV = mRT , el término de la presión se puedeexpresar en términos de la temperatura y el volumen, y (teniendo en cuenta que no haycambio en la energía interna durante un proceso isotermo) la integral se puede evaluarde forma muy sencilla:
QH =
U2∫dU
U1
+
V2∫mrTHV
dV = 0 +mrTH [lnV ]V2V1
V1
obteniéndose, por tanto:
QH = mRTH ln(V2
V1
)que es un método de derivación un tanto complicado. La misma expresión se puede ob-tener también de la ecuación W = −mR ln
(V2V1
)(TH − TL) considerando que las trans-
ferencias de calor y de trabajo son iguales y opuestas.El proceso de compresión isoterma se puede evaluar de forma análoga teniendo en
cuenta que los volúmenes V4 = V1 y V3 = V2, y donde los subíndices (H) y (L) denotanlas temperaturas isotermas alta y baja respectivamente, proporcionando:
QL = −mrTL ln(V2
V1
)
9.1.3. RENDIMIENTODE UNMOTORDE CICLO STIRLING IDEAL
El rendimiento de cualquier máquina térmica se define como la relación entre eltrabajo de salida y el calor de entrada:
η =−WQH

CAPÍTULO 9. DETERMINACIÓN DEL RENDIMIENTO GLOBAL 163
por lo que una ecuación para el rendimiento de un motor de ciclo ideal Stirling se puededesarrollar considerando las ecuaciones:
ηSTIRLING =mR ln
(V2V1
)(TH − TL)
mRTH ln(V2V1
)que se simplifica a:
ηSTIRLING =TH − TLTH
lo que demuestra el interesante hecho de que el rendimiento de un motor de ciclo idealStirling sólo depende de la temperatura y de ningún parámetro más.
Vale la pena recordar que el rendimiento de Carnot para un motor térmico es:
ηCARNOT =TH − TLTH
por lo que se aprecia queηSTIRLING = ηCARNOT
o, en otras palabras, que el motor de ciclo Stirling tiene el máximo rendimiento posiblesegún el Segundo principio de la Termodinámica. Sin embargo, se debe destacar que adiferencia del ciclo Carnot, el motor de ciclo Stirling es una máquina práctica que enrealidad se puede utilizar para producir cantidades útiles de trabajo.
9.1.4. RENDIMIENTO EN EL REGENERADOR
En un motor, un cambio en la relación de volúmenes se puede llevar a cabo fácilmentemediante la variación del líquido de trabajo en los cilindros por debajo del colchón de gas.Hay algunas razones por las que el regenerador de este tipo de motores no se puede diseñarde forma óptima de modo convencional. Por ejemplo debido a las excesivas pérdidas depresión en el regenerador, y, como este motor es capaz de trabajar con fluidos compuestos,un regenerador comúnmente diseñado no puede trabajar con vapores condensados, perotiene inconvenientes adicionales.
Si nos preguntamos cuáles son las pérdidas tolerables en el regenerador y qué se puedehacer para mejorar el rendimiento térmico para obtener el regenerador con diseño óptimo,podemos decir que se han hecho muchas investigaciones teóricas en esta materia, peroaquí se aborda desde un punto de vista diferente que presta especial atención al efectode las temperaturas y las fuentes térmicas en el rendimiento térmico.
Si partimos desde los procesos isotermos en el ciclo ideal Stirling, introducimos elrendimiento en el regenerador para este modelo y denominamos proceso “des-idealizado”isotermo Stirling teniendo un rendimiento variable en el regenerador.
El rendimiento térmico en un proceso se define como el cociente entre el trabajoexterno realizado por ciclo y el calor exterior suministrado por ciclo al motor.
η =W
Qext
Generador Solar de Ciclo de Aire

164 9.1. PARTE TÉRMICA
Teniendo en cuenta todos los procesos el rendimiento del ciclo ideal Stirling es:
ηi =Q3→4 +Q1→2
Q3→4 + (Q2→3 +Q4→1)
En este modelo ideal Stirling se supone un rendimiento unitario en el regenerador, porlo que el calor suministrado en los procesos isócoros por el regenerador Q2→3 a volumenmínimo constante es equivalente al Q4→1 a volumen máximo constante.
Como Q2→3 +Q4→1 = 0 y el calor exterior suministrado para el ciclo ideal es Qext =Q3→4. Ahora tenemos que el rendimiento ideal es:
ηi =Q3→4 +Q1→2
Q3→4
Si consideramos un ciclo real Stirling con un regenerador que no es ideal (ηreg < 1).Definimos un factor de pérdida RV = 1− ηreg
Ahora imaginamos que el trabajo hecho por ciclo debería ser el mismo para el cicloideal que para el real. Entonces, para el caso en que ηreg < 1, se debe aportar mayor caloren el proceso de adición de calor para obtener la temperatura “TE” al final del cambiode estado isócoro hecho en el regenerador y antes del principio de la expansión isoterma.Para el otro cambio de estado isócoro, cesión de calor en el regenerador, se debe evacuarun calor adicional para obtener la temperatura “TC” antes del inicio de la compresiónisoterma a “Vmax”. Esta parte de energía que el regenerador no puede proporcionar alproceso se puede definir como Qreg = RV ∗Q2→3
Con estas consideraciones podemos definir el rendimiento térmico para el procesoreal:
ηtherm =Q3→4 +Q1→2
Q3→4 +RV ·Q2→3
Ahora debemos expresar esta ecuación de forma más conveniente para evaluar lasexpresiones de arriba:
Q3→4 es el calor suministrado en el proceso de expansión isoterma, que es igual altrabajo externo realizado durante la misma expansión isoterma:
Q3→4 = WE = R·MGAS ·TE ln(VmaxVmin
)Para el proceso de compresión:
Q1→2 = WC = R·MGAS ·TC ln(VminVmax
)
WC = −R·MGAS ·TC ln(VmaxVmin
)El calor suministrado a volumen mínimo es:
Q2→3 = MGAS ·cv (TE − TC)

CAPÍTULO 9. DETERMINACIÓN DEL RENDIMIENTO GLOBAL 165
Obteniendo para el rendimiento térmico:
ηtherm =MGAS ·R (TE − TC) · ln
(VmaxVmin
)MGAS ·R·TE · ln
(VmaxVmin
)+RV ·MGAS ·cv (TE − TC)
Si hacemos sustituímos en esta ecuación algunos grupos por conjuntos conocidos,tenemos:
Rendimiento térmico de Carnot: ηc = TE−TCTE
Exponente isentrópico γ = cpcv
y la constante del gas: R = cp − cv dan lugar altérmino: cvR = 1
(γ−1)
ηtherm =1
1ηc
+ 1(γ−1)
RV
ln“VmaxVmin
”El significado de la anterior ecuación es el rendimiento térmico que resulta de conside-
rar un proceso Stirling real, que contiene transformaciones isotermas pero considerandolas pérdidas en el regenerador RV = 1− ηreg; y por tanto, es función de:
El rendimiento de Carnot que se obtiene en el mismo intervalo de temperaturas:TE para la máxima y TC para la mínima del ciclo.
El rendimiento del regenerador que considera las pérdidas en el mismo: RV =1− ηreg
La relación de volúmenes VmaxVmin
El exponente isentrópico γ para el fluido de trabajo
La figura representa el rendimiento térmico para
5 relaciones de volumen diferentes: VmaxVmin= 1, 2 ; 1, 6 ; 2, 5 ; 5, 0 ; 10
2 regeneradores: uno con un rendimiento del 50% y otro con rendimiento nulosignificando que simplemente consiste en un tubo
El fluido de trabajo en todos los casos es aire, para el cual γ = 1, 4
La abscisa en este diagrama es el rendimiento de Carnot, mientras que en ordenadas serepresenta el rendimiento térmico de acuerdo con la anterior ecuación.
Si, en un ciclo real se conocen las temperaturas TE y TC (que nos proporciona elrendimiento teórico de Carnot) y la relación de volúmenes, estimando el rendimiento enel interior del regenerador, tendremos el rendimiento térmico del ciclo real considerado.
Otro resultado para este ejemplo es, teniendo el mismo valor para el rendimientotérmico, teniendo un regenerador con rendimiento nulo, es decir, simplemente un tubo,y considerando el caso en el que la relación de volúmenes es: VmaxVmin
= 2, 5La figura muestra la dependencia con las características del fluido de trabajo γ = cp
cvEste diagrama se ha calculado a partir de:
Generador Solar de Ciclo de Aire
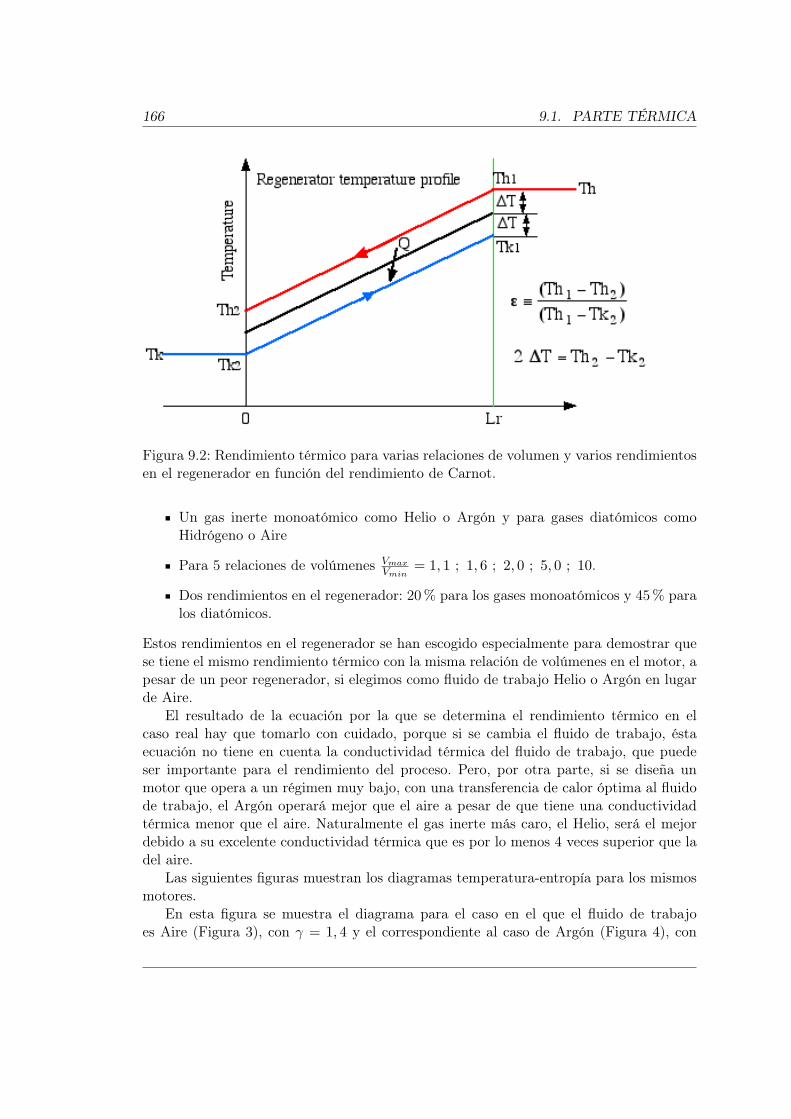
166 9.1. PARTE TÉRMICA
Figura 9.2: Rendimiento térmico para varias relaciones de volumen y varios rendimientosen el regenerador en función del rendimiento de Carnot.
Un gas inerte monoatómico como Helio o Argón y para gases diatómicos comoHidrógeno o Aire
Para 5 relaciones de volúmenes VmaxVmin
= 1, 1 ; 1, 6 ; 2, 0 ; 5, 0 ; 10.
Dos rendimientos en el regenerador: 20% para los gases monoatómicos y 45% paralos diatómicos.
Estos rendimientos en el regenerador se han escogido especialmente para demostrar quese tiene el mismo rendimiento térmico con la misma relación de volúmenes en el motor, apesar de un peor regenerador, si elegimos como fluido de trabajo Helio o Argón en lugarde Aire.
El resultado de la ecuación por la que se determina el rendimiento térmico en elcaso real hay que tomarlo con cuidado, porque si se cambia el fluido de trabajo, éstaecuación no tiene en cuenta la conductividad térmica del fluido de trabajo, que puedeser importante para el rendimiento del proceso. Pero, por otra parte, si se diseña unmotor que opera a un régimen muy bajo, con una transferencia de calor óptima al fluidode trabajo, el Argón operará mejor que el aire a pesar de que tiene una conductividadtérmica menor que el aire. Naturalmente el gas inerte más caro, el Helio, será el mejordebido a su excelente conductividad térmica que es por lo menos 4 veces superior que ladel aire.
Las siguientes figuras muestran los diagramas temperatura-entropía para los mismosmotores.
En esta figura se muestra el diagrama para el caso en el que el fluido de trabajoes Aire (Figura 3), con γ = 1, 4 y el correspondiente al caso de Argón (Figura 4), con

CAPÍTULO 9. DETERMINACIÓN DEL RENDIMIENTO GLOBAL 167
Figura 9.3: Otro resultado para el rendimiento térmico para varios gases y varias relacio-nes de volúmenes.
γ = 1, 6El efecto de las diferentes relaciones de calores específicos se ve de forma más notable
en el gradiente de los cambios isócoros en las líneas de estado (2→3) y (4→1) en estasdos figuras.
Este gradiente es igual a:
dT
dS=
dTMGAS ·cv ·dT
T
=γ − 1
MGAS ·R
El marco de los diagramas temperatura-entropía representa los procesos isotermosideales del ciclo Stirling, el gráfico en el interior del marco es el diagrama calculadopara el proceso real en un motor Stirling con configuración Alfa. En ambos casos el árearepresenta el mismo trabajo externo realizado por ciclo. Observando los gradientes deestos marcos, que son los límites de los intercambios de calor a volumen constante, enlos procesos que ocurren en el ciclo Stirling, tenemos:
El calor intercambiado a volumen constante por el regenerador es mucho menor enel caso del Argón que en el caso del aire.
Generador Solar de Ciclo de Aire

168 9.1. PARTE TÉRMICA
Figura 9.4: Diagrama Temperatura-entropía para el caso de aire
El rendimiento térmico del proceso real calculado mejora desde el caso del Aire alcaso del Argón.
De acuerdo a la ecuación del rendimiento térmico en el ciclo real, éste se mejoradesde el caso en el que se emplea Aire, al caso en el que utilizamos Argón.
NOTA: Los cálculos de los procesos reales se han realizado mediante simulaciones numé-ricas en ordenador con un software específicamente desarrollado para tal fin denominado“STMOT2”
CONCLUSIONES:Se prefiere que cada motor Stirling tenga una alta relación ηtherm
ηc, pero especialmente
en aquellos motores que operan con temperaturas bajas y medias. El regenerador tra-bajará con pérdidas, cuando debería ser diseñado para trabajar con fluidos compuestos.Una posibilidad de equiparar las pérdidas en el regenerador en motores doble flujo en elregenerador es diseñarlos como cambiadores de calor a contracorriente.
Una mejora más allá para tener un mejor rendimiento térmico es aumentando larelación de volúmenes:VmaxVmin
. Esto se puede conseguir además haciendo que las relacionesde volumen en las carreras de compresión y expansión hagan que se cumpla la igualdadcon la relación entre las temperaturas: VEVC = TE
TC.

CAPÍTULO 9. DETERMINACIÓN DEL RENDIMIENTO GLOBAL 169
Una tercera mejora se puede conseguir eligiendo un gas monoatómico inerte en lugarde un gas diatómico o triatómico como fluido de trabajo. En este sentido el Helio serámejor que el Hidrógeno porque su conductividad térmica es el doble; pero a su vez ésteserá mejor que el aire por cumplir las condiciones de ser monoatómico e inerte.
La ecuación que se ha obtenido para el rendimiento térmico en un proceso real Stirlingcon transmisión de calor a volumen constante. Con respecto a ηtherm, Vmax
Vminy γ, los
cálculos del motor para el caso real son similares a la ecuación aquí obtenida, debido aque los requisitos previos de este motor son de mayor interés para una comparación deeste proceso para el caso isotermo no ideal , que para el caso adiabático más común delos motores Stirling:
Los volúmenes donde se producen la adición y la cesión de calor no son externos,están en el interior de los volúmenes donde se producen la expansión y la compresiónrespectivamente.
La transferencia de calor al fluido de trabajo se puede hacer de forma prácticamenteisoterma vertiendo el fluido de trabajo caliente o frío, según lo que corresponda encada caso.
Los volúmenes muertos se pueden reducir únicamente al volumen asociado al rege-nerador.
Se podría discutir un nuevo punto de vista del cálculo de los procesos térmicos del motora continuación:
Una transformación isoterma se define mediante: P ·V = constante
Una transformación isentrópica, a través de : P ·V γ = constante
Una transformación intermedia entre las anteriores, denominada politrópica, sedefine mediante: P ·V n = constante con el exponente 1 < n < γ.
El exponente n es menor que el exponente para la transformación isentrópica. Esto esdebido a que la transmisión de calor en este caso es extremadamente forzada durantelas fases de compresión y expansión; por lo que las transformaciones en este caso sonprácticamente isotermas, acercándose al ciclo Stirling ideal.
Por tanto, el exponente n será 1 < n � γ. Tenemos que n estará muy cerca de launidad.
Como consecuencia de la anterior expresión podemos calcular las temperaturas me-diante:
Tn = Tn−1
(V Gn−1
V Gn
)nOtra hipótesis que se hace cuando estamos calculando este tipo de procesos es el
de tener las mismas presiones en todos los volúmenes del motor. Con estas hipótesisse obtienen unos resultados similares para el caso de los procesos no ideales, que sonprácticamente isotermos en el motor considerado.
Generador Solar de Ciclo de Aire

170 9.2. ANÁLISIS SIMPLIFICADO DE LAS PÉRDIDAS DE BOMBEO.
9.2. ANÁLISIS SIMPLIFICADO DE LAS PÉRDIDAS DEBOMBEO.
A lo largo de este análisis hemos supuesto que en cualquier instante la presión esconstante espacialmente en todo el motor. Sin embargo hemos visto que los altos flujosde calor necesarios en los cambiadores de calor en cambio necesitan áreas mojadas grandesAwg. Este requerimiento, junto con otro que está en contraposición, de tener un volumenvacío da lugar a que los cambiadores de calor tienen gran cantidad de tubos paraleloscon diámetros muy pequeños. La fricción del fluido asociado con el flujo a través delos cambiadores de calor, resulta en una caída de presión en el fluido al atravesar loscambiadores de calor, reduciendo la potencia que podemos extraer del motor. A este efectose le denomina “Pérdidas por bombeo” en los cambiadores de calor, que también se da enel regenerador, y en esta sección tratamos de cuantificar estas pérdidas. Primeramenteevaluamos la pérdida en la presión a través de los tres cambiadores de calor en la fasede compresión. Seguidamente podemos determinar el nuevo valor del trabajo realizadointegrando para todo el ciclo completo, aislando el término de las pérdidas por bombeocomo sigue:
por tanto: W = We +Wc =∮pdVc +
∮(p− Σ∆p) dVe donde el sumatorio Σ∆p se
toma sobre los tres cambiadores de calor.
por lo que: W =∮p (dVc + dVe)−
∮Σ∆pdVe = Wi −∆W donde Wi es el trabajo
Adiabático Ideal realizado por ciclo, y ∆W son las pérdidas por caida de presión otrabajo de bombeo perdido por ciclo.
finalmente: ∆W =2π∫0
(3∑i=1
∆pi dVedθ
)dθ
La caida de presión ∆p es debida a la fricción en el fluido a medida que el flujo atraviesala sección del cambiador de calor. En nuestro modelo se ha supuesto el flujo unidimen-sional, sin embargo la teoría fundamental de la fricción de fluidos paradójicamente tienesingularidades bajo las condiciones de flujo unidimensional. La ley de la viscosidad deNewton establece que los esfuerzos de cortadura τ entre las capas de fluido es proporcio-nal al gradiente de velocidad normal a la dirección del flujo (dudz ) en estas capas, como semuestra a continuación:
De la ecuación vemos que un fluido Newtoniano no puede soportar esfuerzos de corta-dura a no ser que se encuentre en un flujo bidimensional. Esta paradoja se puede resolverdiciendo que el fluido no es estrictamente unidimensional, pero queda representado por sugasto másico medio en la sección. La viscosidad dinámica µ es, básicamente una medidade la fricción interna que ocurre cuando las moléculas del fluido en una capa colisionacon las moléculas de las capas adyacentes viajando a diferentes velocidades, por lo queles transfiere su cantidad de movimiento.
En el rango de interés, la viscosidad dinámica µ depende de la presión. Su dependenciacon la temperatura de los gases de interés se obtiene del siguiente diagrama (Referencia:

CAPÍTULO 9. DETERMINACIÓN DEL RENDIMIENTO GLOBAL 171
Figura 9.5: Ley de viscosidad de Newton
Bretsznajder, A, 1971, "Prediction of the transport and Other Physical Properties ofFluids", International Series of Monographs in Chemical Engineering, II, Oxford: Perga-mon)
La fuerza de resistencia de fricción F está relacionada con los esfuerzos de cortaduracomo sigue:
F = τ ·Awg
donde Awg es la superficie mojada por el gas en el cambiador de calor.Al escribir las expresiones para describir las pérdidas por bombeo introducimos el
concepto del “Radio Hidráulico” d , que determina el cociente entre dos variables im-portantes en un cambiador de calor: el volumen vacío V y el área mojada por el gas:Awg.
d =4VAwg
El factor 4 se incluye por conveniencia. Para el flujo por un conducto circular, oun conjunto de conductos circulares, el radio hidráulico por tanto es igual al diámetrointerior del conducto. Sustituyendo en la expresión de la fuerza obtenida anteriormente,tenemos:
F =4τVd
Ahora definimos el Coeficiente de Fricción Cf como el cociente entre los esfuerzos decortadura τ y la presión dinámica
Cf =τ
12ρu
2
donde ρ es la densidad del fluido y u su velocidad. Sustituyendo, por tanto, para τ enla ecuación de la fuerza, obtenemos la fuerza de resistencia de fricción en términos del
Generador Solar de Ciclo de Aire

172 9.2. ANÁLISIS SIMPLIFICADO DE LAS PÉRDIDAS DE BOMBEO.
Figura 9.6: Diagrama de la viscosidad dinámica con la Temperatura
Coeficiente de Fricción:
F =2Cfρu2V
d
Bajo la hipótesis de flujo casi-estacionario (no hay fuerzas de aceleración), la fuerzade resistencia friccional es igual y opuesta que la fuerza de resistencia de presión, portanto:
F + ∆p·A = 0
donde A es el área transversal. Sustituyendo para F, la caída de presión ∆p está dadapor:
∆p+2Cfρu2V
A·d= 0
Nótese que ∆p puede ser positivo o negativo, dependiendo de la dirección del flujo.Sin embargo, el segundo término de esta ecuación siempre es positivo, y por tanto, laecuación no cumple el principio de conservación de cantidad de movimiento en caso deflujo inverso. Esto lo podemos resolver definiendo el “Coeficiente de Fricción de Reynolds”(Cref ) multiplicando el Número de Reynolds por el Coeficiente de Fricción como sigue:
Cref = Re·Cf

CAPÍTULO 9. DETERMINACIÓN DEL RENDIMIENTO GLOBAL 173
donde Re = ρudµ es el número de Reynolds. Por definición, el Número de Reynolds es
siempre positivo, independientemente de la dirección del flujo. Por tanto, finalmentetenemos:
∆p =−2·Cref ·µ·u·V
d2A
Esta ecuación satisface el principio de conservación de la cantidad de movimiento paraambos flujos, el directo y el invertido, debido a que el signo de ∆p siempre es coherentecon el signo de la velocidad u . Desde que los datos empíricos del Coeficiente de Fricciónse presentan corrientemente como función del Número de Reynolds, es sencillo convertirestos datos al Coeficiente de Fricción de Reynolds. Por ejemplo, el Coeficiente de Fricciónen función del Número de Reynolds para conductos circulares (Diagrama de Moody) se haexpandido enormemente su uso en los últimos 50 años. Estas curvas se han simplificadoy reorganizado en términos del Coeficiente de Fricción de Reynolds como sigue:
Figura 9.7: Coeficiente de fricción de Reynolds en función del Número de Reynolds
Se puede emplear una formulación similar para los tipos de intercambiadores de calory de regeneradores que nos sean de interés.
Los resultados de la simulación de un modelo llamado D90 Ross Yoke-drive se mues-tran en el siguiente diagrama que representa la presión como función del ángulo girado
Generador Solar de Ciclo de Aire

174 9.2. ANÁLISIS SIMPLIFICADO DE LAS PÉRDIDAS DE BOMBEO.
por el cigüeñal:
Figura 9.8: Caída de presión en los tres cambiadores de calor en función del ángulo giradopor el cigüeñal en el modelo “D90 Ross Yoke-drive”
Nótese la magnitud relativa y el ángulo de desfase de la caida de presión en el regene-rador con respecto a la caída de presión en los cambiadores de calor de adición y cesiónde calor.
Los siguientes diagramas muestran las presiones de los volúmenes donde se producenla compresión y la expansión en función del ángulo girado por el cigüeñal. Bajo estas con-diciones para este modelo las pérdidas por bombeo alcanzan los 10,3 W, que representanun 7,5% de la potencia de salida del motor.
The first plot shows the pressure drop across the three heat exchangers. Note therelative magnitude (as well as the phase) of the regenerator pressure drop with respectto those of the heater and cooler.
The following plot shows the expansion and compression space pressures vs crankan-gle. Under these conditions the pumping loss is 10.3 W, or about 7.5% of the net outputpower.

CAPÍTULO 9. DETERMINACIÓN DEL RENDIMIENTO GLOBAL 175
Figura 9.9: Presiones de los volúmenes de compresión y expansión en función del ángulogirado por el cigüeñal.
9.3. ANÁLISIS SIMPLIFICADO DE LAS PÉRDIDAS ENLOS CAMBIADORES DE CALOR
Podemos determinar el rendimiento de los cambiadores de calor de adición y cesión decalor de forma similar a como hemos hecho con el regenerador en términos de la siguienteecuación.
ε = 1− e−NTU
donde ε es el rendimiento del cambiador de calor y NTU es el “Number of Transfer Units”.Por desgracia, no podemos determinar una relación simplificada entre el rendimiento delos cambiadores de calor y del rendimiento del motor, como hicimos con el regenerador.
Refiriéndonos al diagrama de abajo podemos observar que los resultados de la adiciónde calor no ideal en la temperatura media efectiva en el gas contenido en el volumen decalentamiento (Th) es menor que aquella que se encuentra en la pared de tal espacio (Twh).De forma análoga los resultados en la temperatura media efectiva del recinto de cesión
Generador Solar de Ciclo de Aire

1769.3. ANÁLISIS SIMPLIFICADO DE LAS PÉRDIDAS EN LOS CAMBIADORES DE
CALOR
de calor (Tk) son superiores a los que se tienen en la pared de ese volumen (Twk). Estotiene un efecto significativo en el comportamiento del motor, ya que el motor trabaja deforma menos eficiente con un rango de temperaturas límite (máxima y mínima) menorque las que tienen las paredes de los volumenes asociados a las transformaciones. Portanto, el análisis simplificado de los cambiadores de calor determina de forma iterativaestas diferencias de temperatura usando las ecuaciones de transferencia de calor (calorpor convección), los valores de Qh y Qk evaluados considerando el Modelo AdiabáticoIdeal.
Figura 9.10: Distribución de Temperaturas a lo largo de los volúmenes del motor
De la ecuación básica para la transferencia de calor por convección tenemos:
Q = h·Awg· (Tw − T )
donde Q expresada en vatios es la potencia por transferencia de calor, h es el coeficientede convección, Awg se refiere al área mojada, Tw es la temperatura de la pared, y Tes la temperatura del gas. Con el fin de reducir las unidades de esta ecuación al calortransferido en un ciclo Q
(Juliosciclo
)dividimos a ambos lados por la frecuencia de la
operación:
Qk =hk·Awgk· (Twk − Tk)
freq
Qh =hh·Awgh· (Twh − Th)
freq

CAPÍTULO 9. DETERMINACIÓN DEL RENDIMIENTO GLOBAL 177
Ahora rescribimos estas ecuaciones para evaluar respectivamente las temperaturas Tk yTh :
Tk = Twk −Qk·freqhk·Awgk
Th = Twh −Qh·freqhh·Awgh
La solución de los algoritmos de este análisis requiere un proceso iterativo en el queinterviene el Modelo Adiabático Ideal, mediante las nuevas temperaturas Tk y Th , hastaque se consiga que el proceso iterativo converja. Después de cada iteración se tienenunos valores para Qk y Qh. Los flujos a través de los cambiadores de calor se usan paradeterminar el número de Reynolds medio y por tanto los coeficientes de transferencia decalor. Sustituyendo las variables en las ecuaciones de arriba obtenemos Tk y Th , por loque la convergencia se tiene después de un número de iteraciones.
Figura 9.11: Distribución de Temperaturas en los volúmenes de trabajo.
Procediendo con este análisis aplicado al modelo “D90 Ross-Yoke-drive”, los resultadosde la distribución de temperaturas se muestran en el siguiente diagrama. Se debe destacarque la temperatura del gas en el volumen donde se realiza la adición de calor es 59 grados
Generador Solar de Ciclo de Aire

178 9.4. RENDIMIENTO MECÁNICO DEL SISTEMA
Centígrados menor que la correspondiente temperatura en la pared, y de forma similar,la temperatura media en la cesión de calor es 15 grados superior que la de la pared. Esteintervalo menor de temperaturas hace que la potencia que se obtiene del motor se veareducida desde 178 W a 147 W.
9.4. Rendimiento mecánico del sistema
En esta sección se llevarán a cabo las siguientes tareas:
Análisis de rozamiento-Estudios de rozamiento en bloque motor.
El rendimiento mecánico del sistema mide la eficiencia del mecanismo del motor; su valorserá el cociente entre la potencia que se obtiene a la salida al mecanismo y la potenciaaportada al mismo. Podemos escribirlo como: ηm = Ws
We. Como ambos valores de potencia
no son constantes sino que varían llegando a ser cero en algunos momentos (lo que daríarendimientos instantaneos infinitos o nulos), es mejor evaluar el rendimiento por ciclo(por vuelta de motor) en lugar del rendimiento instantáneo. Este rendimiento vendrádado por: ηm = Ws
We
El trabajo aportado al mecanismo es el trabajo realizado por el fluido sobre los émbolosy viene dado por:
We =∫ 2π
0FE(θC)
dzPdθC
dθC +∫ 2π
0FE′(θC)
dzP ′
dθCdθC
Mientras que el trabajo de salida viene dado por el par de salida:
Ws =∫ 2π
0TdθC
Así pues, podemos determinar el rendimiento mecánico de nuestro sistema sin más quemedir la presión en el interior de los émbolos (que nos determina la fuerza ejercida sobrelos mismos), el par de salida y la velocidad angular.La razón por la que ambas cantidades son distintas y el rendimiento no es igual al100% es la existencia de pérdidas en el interior del mecanismo. Dichas pérdidas se debenfundamentalmente al rozamiento que se produce entre las diferentes piezas entre si, debidoal movimiento relativo que existe entre ellas. Podemos escribir el trabajo como el trabajode sálida ideal menos el trabajo que realizan las pérdidas. La expresión del rendimientoqueda:
ηm =Ws
We=Wsideal
We− Wp
We= 1− Wp
We
Por lo tanto tenemos otro modo de evaluar el rendimiento de nuestro sistema evaluandodichas pérdidas. Para ello habrá que calcular los pares y fuerzas de rozamiento que seproducen. En el caso de nuestro mecanismo habrá que calcular el rozamiento en lassiguientes partes del mecanismo:

CAPÍTULO 9. DETERMINACIÓN DEL RENDIMIENTO GLOBAL 179
Rozamiento émbolos-cilindros.
Rozamiento discos-corona.
Rozamiento discos-cigüeñal.
Rozamiento discos-émbolos.
Rozamiento cigüeñal-soporte.
Vamos a estudiar como podemos determinar las pérdidas en cada una de estas partes.
9.4.1. Pérdidas cigüeñal-soporte,cigüeñal-discos y discos-émbolos
Estas pérdidas son las más sencillas de evaluar. En estos casos tenemos un elementoque gira respecto a otro. Normalmente dispondremos de un cojinete de fricción o unrodamiento entre ambas. El objetivo de usar dichos dispositivos es precisamente disminuirla magnitud de la fricción. El la figura 9.12 podemos ver algunos de estos dispositivos.En el caso de usar un cojinete de fricción el par de fricción viene dado simplemente por:
Figura 9.12: Rodamientos y cojinetes usados para disminuir la fricción en el movimientorotatorio.
Mf = µFrd
donde µ es el coeficiente de fricción, Fr la fuerza radial aplicada sobre el cojinete y d eldiámetro del mismo.En el caso de usar un rodamiento la expresión se complica ligeramente. En este casotenemos:
Mf = 0.5µPd
donde µ es el coeficiente de fricción del rodamiento, d es su diámetro y P es la cargadinámica equivalente. Dicha carga viene dada por:
P = XFr + Y Fa
Generador Solar de Ciclo de Aire

180 9.4. RENDIMIENTO MECÁNICO DEL SISTEMA
con Fr la carga radial Fa la carga axial y X e Y los factores de carga radial y axial quevienen dados por el fabricante del rodamiento.Una vez determinado el momento de fricción la determinación de las pérdidas es sencilla.
Wp =∫ 2π
0MfdθC
Podemos escribir: ηCS = WpCSWe
, ηCD = WpCDWe
y ηDE = WpEDWe
; donde WpCS es el trabajode las fuerzas de rozamiento entre el cigüeñal y el soporte,WpCD el trabajo de las fuerzasde rozamiento entre el cigüeñal y los discos yWpED el trabajo de las fuerzas de rozamientoentre los émbolos y los discos.
9.4.2. Pérdidas discos-corona
Las pérdidas que se producen como consecuencia de la interacción entre los discosy las coronas es más compleja de evaluar que la anterior. La fuerza de rozamiento quese produce entre cada disco y su corona respectiva se obtiene como parte de la solucióndel modelo mecánico. Esto se debe a que hemos impuesto la condición de rodadura sindeslizamiento.Sin embargo esta fuerza no realiza trabajo (al no existir movimiento relativo entre lassuperficies). Podría concluirse (erroneamente) que en la interacción disco-corona no seproducen pérdidas. Lo cierto es que la interacción disco-corona es algo más compleja.En primer lugar porque lo que tenemos en realidad es un engranaje y no un disco, ensegundo lugar porque la fuerza de rozamiento si que realiza trabajo; pero este no aparececuando se modelizan los sólidos como perfectamente rígidos. En realidad lo que ocurrees que los sólidos se deforman por lo que la reacción no pasa por el centro de masas deldisco lo que da lugar a un par resistente que es el que origina las pérdidas. En la figura9.13 puede verse representada las dos situaciones.Así pues el par resistente puede evaluarse en este caso como: Mf = µrN ; donde µr es
Figura 9.13: Comparativa entre las situaciones de sólido rígido y sólido deformable parala aparición del par resistente.
el coeficiente de resistencia a la rodadura, y como antes la determinación de las pérdidas

CAPÍTULO 9. DETERMINACIÓN DEL RENDIMIENTO GLOBAL 181
vendrá dada por:
Wp =∫ 2π
0MfdθC
y una vez más podremos escribir: ηSD = WpSDWe
; donde WpSD será el trabajo del roza-miento entre los discos y las coronas.El coeficiente µr necesario para la determinación de las pérdidas dependerá de los ma-teriales y del proceso de fabricación de las piezas. Debido a que en realidad tenemos unengranaje y no un disco puede ocurrir que sea el fabricante el que nos proporcione direc-tamente el valor de ηSD, o puede que puede obtenerse directamente a partir de relacionesempíricas.
9.4.3. Pérdidas émbolos-cilindros
En este caso los cilíndros deslizan en el interior de los cilindros. La fuerza de ro-zamiento vendrá dada por la clásica expresión: Fr = µN , donde µ es el coeficiente derozamiento y N la fuerza normal en el punto de contacto cilindro-émbolo. El problemaes la determinación de N ya que como ocurría anteriormente para obtener su valor haráfalta resolver el modelo mecánico completo. Una vez determinada, las pérdidas puedenobtenerse como:
Wp =∫ 2π
0Fr(θC)
dzPdθC
dθC
Y como siempre escribiremos: ηSE = WpSEWe
.Con todo lo anterior es fácil obtener una expresión para el rendimiento mecánico globaldel sistema.
ηm = 1− (ηCS + ηCD + ηCD′ + ηSD + ηSE + ηSE′)
Generador Solar de Ciclo de Aire

182 9.4. RENDIMIENTO MECÁNICO DEL SISTEMA

Capítulo 10
Elección de los Materiales
10.1. Elección del material para el receptor térmico de altatemperatura
En el motor de ciclo de aire, el colector se utiliza para concentrar la radiación solarincidente para luego transmitir la energía al fluido de trabajo que realiza el ciclo depotencia. Este receptor es una pieza clvae que determina la potencia del motor puestoque la temperatura de funcionamiento está directamente relacionada con la temperaturade trabajo del receptor. Unque no está sujeta a esfuerzos las temperaturas de trabajo sondel orden de las temperaturas de fusión de muchos metales, aproximadamente de 800 ºC.
Estas son las características deseables
Alta resistencia a tensión
Tolerancia a fractura
Gran resistencia al choque térmico inducido por los cambios momentáneos de tem-peratura
Buen comportamiento ante la fatiga
Buen comportamiento ante la propagación de grietas
Estabilidad química a temperaturas elevadas
Buena resistencia a la corrosión y oxidación
Mecanizable
Disponibilidad comercial a un coste razonable
Capacidad de soportar los gradientes de temperatura y de flujo debidas al funcio-namiento del concentrador solar o de la conducción de calor hacia el motor.
Alta temperatura máxima de funcionamiento.
183

184 10.2. MATERIAL DEL REGENERADOR.
Material T Fun.(ºC) σf ν E α Resist. Ch. TérmicoSilicato Cálcico 950 100 0.17 72 0.55 2096
Aluminosilicato de litio 1000 136 0.27 70 1.00 1418Carburo de silicio 1300 7000 0.27 450 4.70 242
Cuadro 10.1: Materiales posibles (Unidades en SI)
Organiz. Potencia T. fun Fluido de trabajo MaterialJPL. Caltech 75 1370 Aire β − SiC sinterizado
Sandia N. L. (DoE) 250 1060 Aire SiC
JPL. DoE Variable 1040 SO2 − SO3 Corderita
Cuadro 10.2: Receptores cerámicos en desarrollo (Unidades en SI)
Muy pocos materiales son capaces de cumplir con estas necesidades. Los aceros inoxida-bles tienen una temperatura límite de funcionamiento de unos 700 ºC, pero las superalea-ciones (aleaciones con Níquel y Titanio) pueden utilizarse a temperaturas cercanas a losmil grados. Sin la composición de alguna de estas aleaciones requiere materiales que seextraen en zonas conflictivas del planeta (como el sur de África) así que nos centraremosen los materiales cerámicos.
Los materiales elegibles dentro del rango de temperaturas están en la tabla 10.1:Como referencia a continuación se listan los resfuerzos conocidos para construir un
receptor de material cerámico en la tabla 10.1.El materal elegido para el receptor es entonces el carburo de silicio sinterizado pues-
to que dispone de dos ventajas esenciales además de cumplir con todos los requisitosnecesarios.
Es un material con el que ya se ha experimentado
Es asequible
10.2. Material del regenerador.
El requisito más restrictivo para el material del regenerador es la solubilidad delos componentes halógenos en el caso que el fluido de trabajo sea hidrógeno. Para ellonos hemos fijado en los dos motores stirling más producidos hasta la fecha: el SPIKE,fabricado por Sunpower, Athens, Ohio y el P-40 desarrollado por United Stirling enSuecia. En este caso el P-40 soporta el hidrógeno como fluido de trabajo.
Sólo las aleaciones de Fe-Ni son capaces de funcionar en un entorno altamente reduc-tor. Podrían utilizarse materiales cerámicos pero la construcción de tubos o de láminascon estos tipos de materiales sería excesivamente cara.
La difusividad ante un reductor como es el radical H+ se valora con la siguiente

CAPÍTULO 10. ELECCIÓN DE LOS MATERIALES 185
Material Ap Qp Ad Qd As Qs
19-9DL 0.140 80 0.032 66 4.200 15.0CRM-6D 0.920 69 0.015 54 6.100 15.0A-286 0.021 60 0.033 62 0.600 -1.7XF-818 0.011 52 0.013 42 0.850 2.5
Cuadro 10.3: Propiedades ante un reductor de aleaciones Fe-Ni (Unidades en SI)
Elemento ConcentraciónC 0.31Si 0.80Mn 0.83P 0.023S 0.01Fe 66.28Ni 9.24Cr 18.86Mo 1.48W 1.30
Cb+Ta 0.42Ti 0.20Co 0
Otros 0.13Cu
Cuadro 10.4: Composición del 19-9DL
fórmula:
D = Ad exp(−QdRT
)La permeabilidad puede calcularse como
P = Ap exp(− QpRT
)Y la Solubilidad.
S = As exp(− QsRT
)Las posibles aleaciones con los parámetros obtenidos de [BHA] son las siguientes:de las tablas se concluye que el mejor material es el 19-9DL con las características
dadas en la tabla siguiente:
Generador Solar de Ciclo de Aire

186 10.3. MATERIAL DEL DESPLAZADOR.
10.3. Material del desplazador.
El desplazador tiene exactamente los mismos problemas que el regenerador con loque a reactividad con agentes reductores se refiere. De este modo nos vemos obligadosa fabricar el desplazador de 19-9DL. Pero este material no soporta el choque térmicocontínuo de la variación de temperatura cíclico de la cabeza del desplazador en el cilindrocaliente.
La única solución es diseñar un recubrimiento cerámico para el desplazador parecidoa los utilizados en las cámaras de combustión de los motores Diesel.
10.3.1. Pequeña reseña sobre el choque térmico.
El choque térmico es el fenómeno por el cual un cuerpo sufre un cambio bruscode temperaturas debido a una variación súbita de sus condiciones de contorno. Comoresultado de estos cambios los esfuerzos internos debidos a la dilatación pueden debilitarel material o, en casos extremos, propagar una grieta que rompa la pieza en cuestión.
En el caso de los materiales dúctiles la deformación máxima y la resistencia a fa-tiga compensan estas dilataciones en puntos específicos pero en materiales no dúctilescomo los aceros de alta resistencia o los materiales cerámicos este efecto suele ser el másdeterminante en la elección del material.
El choque térmico es un criterio esencial de diseño en casos como los vehículos espa-ciales, hornos, material de laboratorio, cambiadores de calor y piezas de motores térmicos.
La capacidad de un material de soportar un choque térmico se determina por su resis-tencia a choque térmico. Conocida la distribución de temperaturas podemos relacionarlacon los esfuerzos internos con la ley de Hook generalizada:
α(Tav − T ) =σ1 − νσ2
E
donde:
α es el coeficiente de dilatación térmica
E es el módulo de Young
ν es el módulo de Poisson
σ es el tensor de tensiones, con sus respectivos componentes
Tav es la temperatura media del cuerpo.
Suponiendo que el material se comporta de manera análoga en todas las direccionespodemos definir un esfuerzo adimensional
σs =Tav − Ts
T0=σ(1− ν)T0Eα
La siguiente simplificación es que, debido a que el choque térmico es un efecto pu-ramente superficial, suponemos que las otras longitudes características de la pieza son

CAPÍTULO 10. ELECCIÓN DE LOS MATERIALES 187
Material σF ν k E (GPa) α(10−6) R2 R1
RBSN 270 0.27 15 190 3.1 335 5025HPSN 783 0.27 20 303 3.0 629 12580HIPSN 700 0.27 25 310 3.4 485 12125SSN 740 0.27 17 300 3.3 347 5899SSIC 480 0.27 60 400 3.6 190 11400HPSIC 700 0.27 90 450 4.6 242 21780Al2O3 280 0.26 33 370 4.7 64 2112PSZ 500 0.24 4 170 8.8 257 1028
Al2TiO5 38 0.30 2 18 8.7 643 1286
Cuadro 10.5: Comparación de recubrimentos ante choque térmico (Unidades en SI)
despreciables. Entonces analizamos sólo el choque térmico en un plano utilizando el mó-dulo de Biot β (propio de cada material) hallando la tensión máxima:
σF = A+B
β
A partir de esta tensión definimos el primer parámetro necesario para valorar elmaterial ante un choque térmico:
R1 =(1− ν)σFk
Eα
La interpretación física de este parámetro es la siguiente:
El flujo de calor máximo que puede soportar el material en condiciones estacionarias
El cambio máximo de temperatura que puede soportar en valores bajos de β
El flujo máximo de calor que puede soportar la pieza entera si no tiene ningúntaladro o cavidad.
Otro parámetro importante es
R2 =σF (1− ν)
Eα
En el que ya no se valoran los flujos térmicos sino las diferencias de temperatura. Sila superficie de contacto de la pieza en cuestión es plana y no está sujeta a esfuerzos enla zona de impacto térmico no necesitamos más parámetros.
10.3.2. Elección del material
Los materiales elegibles para el recubrimiento se detallan en la tablaEl SSIC es el carburo de silicio sinterizado, el mismo material escogido para el recep-
tor, relativamente barato y fácil de manipular así que es nuestra elección final.
Generador Solar de Ciclo de Aire

18810.4. MATERIAL DEL ÉMBOLO DE POTENCIA Y DEL RESTO DE PIEZAS DEL
MOTOR.
10.4. Material del émbolo de potencia y del resto de piezasdel motor.
El resto de piezas del motor, al igual que el material del émbolo de potencia (frío)también están en contacto conínuo con el fluido de trabajo. Por este motivo tambiénson aplicables las consideraciones utilizadas en el diseño del regenerador, aunque menosrestrictivas por el menor gradiente de temperaturas. Sin embargo, para asegurar la conti-nuidad de dilataciones y de esfuerzos, nuestra decisión final es utilizar el acero inoxidablede alta resistencia 19-9DL, proporcionado por por Carpenter y Uniloy.

Parte III
Diseño detallado e implementación
189


Capítulo 11
Diseño del mecanismo delmovimiento del émbolo
En este capítulo se han desarrollado las siguientes tareas:
Análisis paramétrico-Optimización mecánica del motor a partir del análisis paramétrico.-Integración del análisis paramétrico mecánico y termodinámico.
Una vez que se ha elaborado el modelo del funcionamiento mecánico del motor, se buscasu optimización. Se prestará atención a dos aspectos: por un lado se buscará la maximi-zación de la potencia del motor, por otro disminuir al mínimo las reacciones internas delmecanismo para minimizar el peso e incrementar la vida del mismo. Sin embargo parapoder realizar dicha optimización, aparte del modelo mecánico del motor se requierenmodelos para determinar la presión que se ejerce sobre los émbolos en función de losparámetros del ciclo. Estos modelos permitirán determinar el par motor (y por tanto lapotencia) y las reacciones internas del mecanismo en función de los parámetros geomé-tricos del mecanismo, lo que permitirá optimizarlos. Sin embargo antes de proceder adicha optimización, se realizará un estudio sobre el movimiento libre del sistema lo quepermitirá justificar algunas hipótesis que se realizarán posteriormente y que facilitaránel estudio del sistema.
11.1. Modelos termodinámicos para la determinación de lapresión sobre los émbolos
Para poder determinar el funcionamiento mecánico del sistema y proceder a su op-timización es necesario conocer la presión ejercida por el fluido de trabajo sobre losémbolos. Se necesitan por lo tanto modelos que permitan determinar dicha presión enfunción de la coordenada generalizada del sistema, el ángulo de giro del cigüeñal (θC).Para ello es necesario elaborar algún modelo termodinámico del ciclo. Se usarán dos mo-delos simplificados: un modelo con ciclo Stirling ideal, y otro con ciclo Stirling isotermo.
191

192 11.1. MODELOS TERMODINÁMICOS SIMPLIFICADOS
A partir de estos dos modelos que se explican a continuación se podrá determinar lamecánica del sistema.
11.1.1. Ciclo Stirling ideal
Figura 11.1: Diagrama p-V de un ciclo Stirling ideal.
En este modelo se supondrá que en cualquier instante todo el gas se encuentra siemprea la misma presión y temperatura. Dicha presión será la que se ejerza sobre los émbolos.En la figura puede verse el diagrama p-V del ciclo Stirling ideal. Esta compuesto por dosisocoras (2-3 y 4-1) y dos isotermas (1-2 y 3-4). El ciclo queda perfectamente definidoproporcionando los volúmenes máximos y mínimos (Vmax y Vmin) y las presiones máximay mínima (pmax y pmin) o la temperaturas máxima y mínima (Tmax y Tmin).Integrando en el diagrama p-V se puede obtener la cantidad de trabajo (energía) que esposible extraer del ciclo.
W = mRg ln(VmaxVmin
)(Tmax − Tmin) (11.1)
Esta fórmula es importante, puesto que proporciona la cantidad de energía que se puedeobtener idealmente del motor, y por tanto será útil para comparar con la energía obtenidarealmente.Para poder relacionar dicho ciclo con el movimiento del mecanismo se requiere la ley queproporciona la variación de volumen del fluido en función del ángulo de giro del cigüeñal.Teniendo en cuenta la cinemática del mecanismo dicha ley es:
V = Vres +A0R(1− cos θC) +A0′R(1− cos(θC + betta)) (11.2)
donde A0 y A0′ son las áreas de los cilindros 0 y 0’; y Vres es el volumen fijo o “residual",es decir la suma del volumen del regenerador y de los volúmenes muertos de los cilindros0 y 0’.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO193
A partir de esta ley se puede determinar fácilmente la presión en los émbolos de la formasiguiente:
p(θC) =mRgTminV (θC)
sidV
dθC< 0
p(θC) =mRgTmaxV (θC)
sidV
dθC> 0
(11.3)
Con lo que ya se tiene la expresión requerida para la presión en función del movimientodel sistema.
11.1.2. Ciclo Stirling isotermo
Figura 11.2: Descripción del modelo de ciclo isotermo.
A pesar de que el modelo anterior permite evaluar las presiones en los émbolos deun modo sencillo, no representa bien la física del sistema. Se requiere un modelo que seaproxime más a la realidad. Dicho modelo es el modelo isotermo, y fue planteado porprimera vez por Gustav Schmidt en 1871. En dicho modelo se supone que todo el gas seencuentra siempre a la misma presión pero las temperaturas son distintas dependiendode la zona en la que se encuentre el gas. En el cilíndro de compresión (o “frio", el 0)se supone que se encuentra siempre a la temperatura mínima del ciclo Tmin, en el deexpansión (o“caliente", el 0′) a la temperatura máxima Tmax y en el regenerador a unatemperatura intermedia entre ambas Tr. En la figura 11.2 puede verse un esquema delmodelo isotermo.Con este modelo y a partir de la ley de gas ideal se puede obtener la fórmula queproporciona la presión en los émbolos.
p =mRg(
V0Tmin
+ VkTmin
+ VrTr
+ VhTmax
+ V0′Tmax
) (11.4)
Generador Solar de Ciclo de Aire

194 11.2. ESTUDIO DEL MOVIMIENTO LIBRE DEL SISTEMA
Donde V0, V0′ y Tr vienen dadas por:
V0 = A0R(1− cos θC)V0′ = A0′R(1− cos(θC + betta))
Tr =Tmax − Tmin
ln(TmaxTmin
)En la figura 11.3 se ha representado el modelo de ciclo isotermo frente al ciclo ideal,ambos funcionando con la misma masa de gas y entre los mismos volúmenes mínimo ymáximo. Puede verse como el ciclo isotermo tiene un area inferior, lo que significa que lacantidad de energía que puede obtenerse a partir de él es inferior a la del ciclo ideal. Sinembargo dicho modelo representa de una manera más realista la física real del sistema,a pesar de ser un modelo muy simple y todavía bastante alejado del ciclo real.Estos dos modelos permitirán evaluar el par motor (y por tanto su potencia) y optimizar
Volumen
Pre
sión
Ciclo isotermo vs. ciclo ideal
Ciclo idealCiclo isotermo
Figura 11.3: Comparativa entre el ciclo ideal y el ciclo isotermo correspondiente.
los parámetros de los que estos dependen.
11.2. Estudio del movimiento libre del sistema
En la sección 9.4 se obtuvo la ecuación (8.3) que proporcionaba el movimiento delsistema. Si en dicha ecuación se eliminan las fuerzas externas se obtiene la ecuación delmovimiento libre del mismo. Dicha ecuación es:
θc(IyC + 2IyD +mDR
2
2+mER
2(sin2 θC + sin2(θC + β)))
+ ˙θC2mER
2
2(sin 2θC + sin(2θC + 2β)) = 0 (11.5)

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO195
Esta ecuación es una ecuación diferencial ordinaria que puede resolverse analítica o nu-méricamente sin más que proporcionar las condiciones iniciales. En la figura 11.4 se harepresentado la velocidad angular ( ˙θC) en función del ángulo de giro del cigüeñal (θC)obtenida a partir de la solución de dicha ecuación.Se intenta estudiar la influencia de los diversos parámetros en el movimiento libre del
0 50 100 150 200 250 300 3502996.5
2997
2997.5
2998
2998.5
2999
2999.5
3000
θC [º]
ω [r
.p.m
.]
Figura 11.4: Variación de la velocidad angular en el movimiento libre.
sistema. Para ello se reescribirá la ecuación (11.5) como:
θc(I +mER2(sin2 θC + sin2(θC + β)))
+ ˙θC2mER
2
2(sin 2θC + sin(2θC + 2β)) = 0 (11.6)
donde I = IyC + 2IyD + mDR2
2 . Existen por tanto tres parámetros que influyen en elcomportamiento del sistema: I,mE y R. En las figuras 11.5, 11.6 y 11.7 se ha representadola amplitud de la variación de la velocidad angular en función de cada uno de estosparámetros. Analizándolas se observa que para reducir la amplitud de la variación hayque intentar reducir la masa de los émbolos o el radio de la corona. También se puedeoptar por incrementar la I, aumentando la masa de los discos, IyD o IyC . Esta últimaopción parece la más razonable ya que lo único que habría que hacer es añadir un discode inercia en el cigüeñal para regularizar la marcha del motor.En cualquier caso se observa que para los valores típicos de los parámetros involucradosla variación de la velocidad angular es pequeña y puede reducirse tanto como se quierade un modo simple sin más que añadir un disco de inercia al mecanismo. Esto permitirájustificar la hipótesis que se realizará posteriormente de que la aceleración angular delmecanismo es nula.
Generador Solar de Ciclo de Aire

196 11.3. OPTIMIZACIÓN DEL PAR Y LA POTENCIA DEL MOTOR
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.325
0.33
0.335
0.34
0.345
0.35
0.355
R [m]
���������� ��
Figura 11.5: Amplitud de la variación de la velocidad angular en función del radio de lacorona.
0 1 2 3 4 5 6 7 8 9 100.34
0.3405
0.341
0.3415
0.342
0.3425
0.343
0.3435
0.344
0.3445
0.345
����� �����
��� ���������
Figura 11.6: Amplitud de la variación de la velocidad angular en función de la masa delos émbolos.
11.3. Optimización del par y la potencia del motor
En la sección 9.4 se obtuvo la ecuación (8.3) que describía el movimiento del siste-ma sin carga. Ahora se requiere la ecuación que proporciona el movimiento del sistemacargado, es decir cuando este ejerce un par sobre alguna carga. Teniendo en cuenta laecuación (8.3) el par que ejerce el motor viene dado por:
T = R(FE sin θC + FE′ sin(θC + β))
− θC(IyC + IyD +mDR
2
4+R2(mE sin2 θC +mE′ sin2(θC + β)))
− ˙θC2R2
2(mE sin 2θC +mE′ sin(2θC + 2β)) (11.7)

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO197
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
x 10−4
0.3415
0.342
0.3425
0.343
0.3435
0.344
0.3445
0.345
I [kg m2]
������������
Figura 11.7: Amplitud de la variación de la velocidad angular en función de la inerciaconjunta de discos-cigüeñal.
Esta ecuación determina el par motor en función del ángulo de giro del cigüeñal, lavelocidad y la aceleración angular del mismo, y de las fuerzas que se ejercen sobre losémbolos. Dichas fuerzas serán:
FE = A1p0 = A0p0
FE′ = A1′p0 = A0′p0′
y p0, p0′ vendrán dadas por las ecuaciones obtenidas en la sección 11.1.Ya se comentó en la sección 11.2 que estaba justificado considerar que la aceleraciónangular es nula, y que por tanto el motor funciona a régimen constante. Si se hace estahipótesis (θC = 0 y ˙θC = ω = cte.) se puede simplificar la ecuación (11.7) que queda:
T = R(FE sin θC + FE′ sin(θC + β))
− ˙θC2R2
2(mE sin 2θC +mE′ sin(2θC + 2β)) (11.8)
A partir de estas ecuaciones se puede obtener la potencia media del motor como:
P =˙θC
2π
∫ 2π
0TdθC (11.9)
Examinando las ecuaciones puede verse que parámetros geométricos y másicos afectanal par (y por tanto a la potencia) del sistema. Son los siguientes:
Radio de la corona R.
Ángulo de desfase β
Generador Solar de Ciclo de Aire

198 11.3. OPTIMIZACIÓN DEL PAR Y LA POTENCIA DEL MOTOR
Áreas de los cilíndros A0 y A0′
Masas de los émbolos mE y mE′
Régimen de giro ˙θC
Para facilitar el estudio del sistema se substituiran las áreas de los cilindros A0 y A0′
por dos nuevos parámetros: la cilindrada del motor y la relación de áreas: Cilindrada =2R(A0 +A0′) y rareas = A0
A0′.
A continuación se procederá a analizar la influencia de cada uno de estos parámetros enla potencia del motor para un ciclo dado.
11.3.1. Estudio de la influencia del radio de la corona
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 124
26
28
30
32
34
36
38
40
42
44Potencia en función de R
R [m]
P [k
W]
Ciclo isotermoCiclo ideal
Figura 11.8: Potencia en función del radio de la corona.
En la figura 11.8 se ha representado la variación de la potencia obtenida con el radiode la corona manteniendo el resto de los parámetros constantes. Puede verse como R noinfluye en la potencia obtenidad, por lo que podrá determinarse en base a otras considera-ciones (constructivas,resistencia, etc.). Igualmente se observa como la potencia obtenidaes mucho mayor cuando se modeliza el ciclo como ideal, como era de esperar. Finalmentese ha elegido un valor de R de 10 cm. Esta elección se justificará posteriormente en lasección 11.4.6.
11.3.2. Estudio de la influencia de la masa de los émbolos
Otro parámetro de las ecuaciones sin influencia en la potencia es la masa de losémbolos. En la figura 11.9 puede verse la variación con dicho parámetro. Como ocurría conel radio de la corona se observa que dicho parámetro no afecta en absoluto a la obtenciónde potencia, por lo que se determinará a partir de otras consideraciones posteriores. Comoantes la potencia del ciclo ideal es muy superior a la del ciclo isotermo.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO199
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 524
26
28
30
32
34
36
38
40
42
44
Masa de los émbolos [kg]
Pot
enci
a [k
W]
Ciclo isotermoCiclo ideal
Figura 11.9: Potencia del motor en función de la masa de los émbolos.
11.3.3. Estudio de la influencia de la cilindrada del motor
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
50
100
150
200
250
300
350
400
450
Cilindrada [cm3]
Pot
enci
a [k
W]
Ciclo isotermoCiclo ideal
Figura 11.10: Potencia en función de la cilindrada del motor.
En la figura 11.10 puede verse la variación de la potencia obtenida con la cilindradadel motor manteniendo el resto de los parámetros constantes. Se observa como la potenciacrece linealmente con la cilindrada tanto como para el ciclo ideal como para el isotermo.Como siempre la potencia obtenida del primero es superior. Para un motor de unos 25kW que es la potencia objetivo se requiere un cilindrada de unos 1000 c.c. Este será elvalor elegido para nuestro diseño.
Generador Solar de Ciclo de Aire

200 11.3. OPTIMIZACIÓN DEL PAR Y LA POTENCIA DEL MOTOR
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
50
100
150
rpm
Pot
enci
a [k
W]
Ciclo isotermoCiclo ideal
Figura 11.11: Potencia del motor en función del régimen de giro.
11.3.4. Estudio de la influencia del régimen de giro
En la figura 11.11 se ha representado la variación de la potencia con el régimende giro. Se ve como la potencia crece linealmente con dicho régimen como ocurria conla cilindrada. Sin embargo hay que tener en cuenta a la hora de su elección que unincremento en el régimen de giro penaliza en gran medida la vida del motor, por lo quesiempre hay que intentar reducirlo en la medida de lo posible. Además existen otrasconsideraciones adicionales a las puramente mecánicas como son el acoplamiento con elgenerador de energía eléctrica. Para nuestro motor se ha seleccionado un valor estandarde 3.000 r.p.m.
11.3.5. Estudio de la influencia de la relación de áreas y β
En este caso se ha decidido estudiar la influencia de ambas variables conjuntamenteya que estan interrelacionadas.En la figura 11.12 puede verse representada la potencia obtenida, tanto para el cicloideal como para el ciclo isotermo en función de la relación de áreas para varios valoresdel desfase β. Se pueden obtener muchas conclusiones útiles a partir esta gráfica .En primer lugar se ve como los resultados obtenidos para el ciclo ideal no son del todocongruentes. Mientras que el ciclo isotermo predice que la potencia obtenida cuando larelación de áreas tiende a 0 es nula; el ciclo ideal predice que dicha potencia tiende ainfinito lo que es a todas luces imposible. Otra incongruencia es que mientras el modeloisotermo predice que la potencia crece cuando se incrementa el desfase, el modelo idealpredice exactamente lo contrario: un decrecimiento de la misma.En segundo lugar se observa como ambos modelos coinciden en la existencia de una asín-tota de la potencia cuando la relación de áreas tiende a infinito, lo que indica que que seha de mantener dicha relación en valores de orden la unidad. El modelo isotermo ademáspredice un máximo de la potencia cuando la relación de áreas se encuentra entre 1 y 2.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO201
0 1 2 3 4 5 6 7 8 9 100
10
20
30
40
50
60
70
Relación de áreas
Pot
enci
a [k
W]
β=70º (isotermo)
β=70º (ideal)
β=80º (isotermo)
β=80º (ideal)
β=90º (isotermo)β=90º (ideal)
β=100º (isotermo)
β=100º(ideal)
β=110º (isotermo)
β=110º (ideal)
Figura 11.12: Potencia en función de la relación de áreas para varios ángulos β.
Por último señalar la caida de potencia a 0 para algunos valores de la relación de áreascuando los ángulos son grandes. Dicha caida se produce debido a que esa combinaciónde parámetros no es posible con el ciclo termodinámico elegido.En la figura 11.13 se ha representado ampliada la zona de interés; es decir la compren-dida entre las relaciones de áreas 1 y 2 para ángulos entre 90º y 100º. Únicamente serepresenta el caso de ciclo isotermo, debido a las incongruencias que presentaba el cicloideal.La primera conclusión importante que se obtiene a partir del estudio es que indepen-dientemente del ángulo de desfase la potencia presenta un máximo para una relación deáreas de 1,6. Este será el valor elegido para el diseño de nuestro motor.En cuanto al ángulo, se puede concluir a partir de la gráfica que es conveniente aumen-tarlo lo máximo posible. Sin embargo hay que tener cuidado de no entrar en la zona enla que el ciclo no es posible. Se van a estudiar más detenidamente las razones por lascuales existen combinaciones de parámetros no posibles.Dado un ciclo termodinámico, y las características geométricas del motor es posible de-terminar el volumen residual Vres (es decir la suma del volumen del regenerador y de losvolúmenes muertos de los cilindros 0 y 0’) y la masa de gas necesarios para que tengalugar dicho ciclo. Dichos valores se obtienen imponiendo que la presión sea igual a la pre-sión máxima del ciclo cuando el volumen es mínimo y que sea mínima cuando el volumenes el máximo. La resolución de estas dos ecuaciones puede llevar a resultados absurdos
Generador Solar de Ciclo de Aire

202 11.3. OPTIMIZACIÓN DEL PAR Y LA POTENCIA DEL MOTOR
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 222
23
24
25
26
27
28
29
30
Relación de áreas
Pot
enci
a [k
W]
β=90º
β=92º
β=94º
β=96ºβ=98º
β=100º
β=102º
Figura 11.13: Potencia en función de la relación de áreas para varios ángulos β para elciclo isotérmico.
como que la masa o el volumen residual son negativos. Esto indica que la combinaciónde dicho ciclo y esos parámetros geométricos no es posible.Hay que tener en cuenta que incluso aunque dichos valores no sean negativos puede queno sea posible diseñar un motor con dichos parámetros. No se puede hacer el regeneradortan pequeño como se quiera, puesto que este necesita un volumen mínimo para podercumplir con su función. En la figura 11.14 se ha representado la variación del volumenresidual necesario en función de la relación de áreas para varios ángulos de desfase β.Puede verse como el incremento en el ángulo de desfase lleva aparejado una disminu-ción del volumen residual (y por tanto del regenerador), llegando a valores negativos enalgún caso. Es por esto que se ha decidido mantener el ángulo del cigüeñal en 90º, yaque aunque implica una reducción de la potencia, permite obtener valores razonables delvolumen residual. En particular en este caso se obtiene un volumen residual de unos 55centímetros cúbicos, lo que en principio parece razonable. En caso de no poder diseñar unregenerador adecuado con ese volumen habría que modificar los parámetros. E igualmen-te si se consiguiese reducir el volumen del regenerador cabría plantearse la posibilidad deaumentar el ángulo de desfase y mejorar así la potencia obtenida.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO203
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2−20
0
20
40
60
80
100
Relación de áreas
Vre
s [c.c
.]
β=90º
β=92º
β=94º
β=96ºβ=98º
β=100º
β=102º
Figura 11.14: Volumen residual necesario en función de la relación de áreas para variosángulos de desfase β.
11.3.6. Resumen: selección de parámetros y representación de la curvade par
A lo largo de toda la sección se ha ido estudiando la influencia de los diferentesparámetros sobre el comportamiento del motor, y en particular sobre su potencia. Estoha permitido seleccionar los diferentes parámetros que optimizaban dicha potencia. Serecopilan aquí los parámetros elegidos finalmente. Son los siguientes:
Radio de la corona R = 10cm.
Ángulo de desfase β = 90
Relación de áreas rareas = 1, 6
Cilindrada Cilindrada = 1000c.c.
Régimen de giro n = 3000r.p.m.
Áreas de los cilindros A0 = 1923cm2 y A0′ = 3077cm2
Volumen residual Vres = 53, 7c.c.
El motor funcionando con estos parámetros y bajo el ciclo termodinámico elegido pro-porciona lo siguiente:
Generador Solar de Ciclo de Aire

204 11.3. OPTIMIZACIÓN DEL PAR Y LA POTENCIA DEL MOTOR
Par medio Tmedio = 79, 12Nm.
Potencia media Pmedia = 24, 85kW
En las figuras 11.15, 11.16 y 11.17 se han representado los diagramas p-V de ambos ciclos,la variación de la presión y el volumen con el ángulo de giro del cigüeñal y las curvas depar correspondientes respectivamente.
100 200 300 400 500 600 700 800 900 10005
10
15
20
25
30
35
40
45
50
55
Volumen [c.c]
Pre
sión
[bar
]
Figura 11.15: Diagrama P-V para el ciclo ideal y el ciclo isotermo del motor.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO205
0 50 100 150 200 250 300 3500
250
500
750
1000V
olum
en [c
.c.]
θC [º]
0 50 100 150 200 250 300 3500
10
20
30
40
Pre
sión
[bar
]
Figura 11.16: Variación de la presión y el volumen con el ángulo de giro del cigüeñal.
0 50 100 150 200 250 300 350−500
−250
0
250
500
750
1000
θC [º]
Par
[Nm
]
Ciclo isotermoCiclo ideal
Figura 11.17: Curvas de par para el ciclo ideal y el ciclo isotermo.
Generador Solar de Ciclo de Aire

206 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
11.4. Análisis de las reacciones internas
En la sección anterior se llevó a cabo un análisis de la influencia de los distintosparámetros geométricos en la potencia del motor. Ahora se llevará a cabo un análisissimilar pero estudiando la influencia de dichos parámetros en las reacciones internas delmecanismo. En este caso el objetivo será la minimización de dichas reacciones a fin demaximizar la vida del motor.Como sucedia anteriormente, dicho análisis permitirá extraer conclusiones interesentan-tes de cara al diseño del motor, lo que permitirá finalmente seleccionar los parámetrosgeométricos.Antes de todo esto es necesario obtener un modelo mecánico que permitá obtener todaslas reacciones y fuerzas internas y las ecuaciones correspondientes a dicho modelo. Esteserá el objetivo de la siguiente sección.
11.4.1. Modelo mecánico del mecanismo
Ya se comentó en la sección ?? que para poder obtener las reacciones internas delmecanismo había que modelizar las uniones entre las distintas piezas que lo conforman.A partir de dicha modelización pueden plantearse las ecuaciones de Newton para cadasólido lo que proporciona el sistema de ecuaciones, cuya solución proporciona dichas reac-ciones internas. En la figura 11.18 puede verse el esquema cinemático1 de la modelizacióncompleta del mecanismo del motor.El sistema de ecuaciones correspondiente a este modelo es el siguiente:
Cigüeñal C
• Fuerzas
xc : RSCx +R45t +R4′5′r sinβ +R4′5′t cosβ = 0 (11.10)yc : R4′5′y −R45y +RSCy = 0 (11.11)zc : R45r +RSCz +R4′5′r cosβ −R4′5′t sinβ = 0 (11.12)
1Para mas información respecto de la modelización y represantación normalizada de mecanismosconsultar la norma UNE-EN ISO 3952

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO207
1
Figura 11.18: Modelización completa del mecanismo.
• Momentos
xc : MSCx +M45x +M4′5′z sinβ +M4′5′x cosβ +R
2R45y
− l62R45r +
l62R4′5′r cosβ − l6
2R4′5′t sinβ
− R
2R4′5′y cosβ + JxyC θC − JyzC ˙θC
2= −JxyC θC
(11.13)
yc :R
2R45t +
R
2R4′5′t − T − IyC θC = IyC θC (11.14)
zc : MSCz +M45z +M4′5′z cosβ −M4′5′x sinβ
+l62R45t +
R
2R4′5′y sinβ − l6
2R4′5′t
cosβ
− l62R4′5′r sinβ + JyzC θC + JxyC
˙θC2
= −JyzC θC
(11.15)
Disco D
• Fuerzas
xc : R23t −R54t +R13z sin θC −R13x cos θC = mDR
2θC (11.16)
yc : −R13y +R54y = 0 (11.17)
zc : −R23n −R54r −R13z cos θC −R13x sin θC = −mDR
2˙θC
2(11.18)
Generador Solar de Ciclo de Aire

208 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
• Momentos
xd : −M45x cos(2θC)−M45z sin(2θC) +M23x cos(2θC)−M13x cos θC
−M13z sin θC + lDgR23t sin(2θC) + lDgR23n cos(2θC) +R
2R13y
+ (l4 − lDg)R54t sin(2θC)− (l4 − lDg)R54r cos(2θC)
+ lDgR13z cos θC − lDgR13x sin θC − JyzD ˙θC2
= 0(11.19)
yd :R
2R23t −
R
2R13z sin θC −
R
2R13x cos θC + IyD θC = −IyD θC (11.20)
zd : M45x sin(2θC)−M45z cos(2θC)−M23x sin(2θC)+M13x sin θC −M13z cos θC + lDgR23t cos(2θC)− lDgR23n sin(2θC)− lDgR13z sin θC − lDgR13x cos θC + (l4 − lDg)R54r sin(2θC)
+ (l4 − lDg)R54t cos(2θC)− JyzD θC = JyzD θC(11.21)
Disco D′
• Fuerzas
xc : R2′3′t−R5′4′t
+R1′3′z sin(θC + β)
−R1′3′x cos(θC + β) = mDR
2θC
(11.22)
yc : −R1′3′y +R5′4′y = 0 (11.23)
zc : −R2′3′n −R5′4′r −R1′3′z cos(θC + β)
−R1′3′x sin(θC + β) = −mDR
2˙θC
2 (11.24)

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO209
• Momentos
xd′ : M4′5′x cos(2θC + 2β) +M4′5′z sin(2θC + 2β)−M2′3′x cos(2θC + 2β)+M1′3′x cos(θC + β) +M1′3′z sin(θC + β) + lDgR2′3′t
sin(2θC + 2β)
+ lDgR2′3′n cos(2θC + 2β)− R
2R1′3′y + (l4 − lDg)R5′4′t
sin(2θC + 2β)
− (l4 − lDg)R5′4′r cos(2θC + 2β) + lDgR1′3′z cos(θC + β)
− lDgR1′3′x sin(θC + β)− JyzD ˙θC2
= 0(11.25)
yd′ : − R
2R2′3′t
− R
2R1′3′z sin(θC + β)
− R
2R1′3′x cos(θC + β)− IyD θC = IyD θC
(11.26)
zd′ : M4′5′x sin(2θC + 2β)−M4′5′z cos(2θC + 2β)−M2′3′x sin(2θC + 2β) +M1′3′x sin(θC + β)−M1′3′z cos(θC + β)− lDgR2′3′t
cos(2θC + 2β) + lDgR2′3′n sin(2θC + 2β)− lDgR1′3′z sin(θC + β)
− lDgR1′3′x cos(θC + β)− (l4 − lDg)R54r sin(2θC + 2β)
− (l4 − lDg)R5′4′tcos(2θC + 2β) + JyzD θC = −JyzD θC
(11.27)
Émbolo E
• Fuerzas
xe : R01x +R31x = 0 (11.28)ye : R01y +R31y = 0 (11.29)
ze : R31z − FE = −mER(θC sin θC + ˙θC2
cos θC) (11.30)
• Momentos
xe : lEgR31z − hEgR31y +M31x +M01x = 0 (11.31)ye : − hEgR31x +M01y = 0 (11.32)ze : − lEgR31x +M31z = 0 (11.33)
Émbolo E′
• Fuerzas
xe : R0′1′x +R3′1′x = 0 (11.34)ye : R0′1′y +R3′1′y = 0 (11.35)
ze : R3′1′z − FE′ = mE′R(θC sin(θC + β) + ˙θC2
cos(θC + β)) (11.36)
Generador Solar de Ciclo de Aire

210 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
• Momentos
xe : lEgR3′1′z − hEgR3′1′y +M3′1′x +M0′1′x = 0 (11.37)
ye : − hEgR3′1′x +M0′1′y = 0 (11.38)
ze : − lEgR3′1′x +M3′1′z = 0 (11.39)
Cuando se analiza dicha modelización se observa que que es hiperestática. Hay treintaecuaciones y cuarenta incógnitas, por lo que existen díez incógnitas hiperestáticas. Asípues para resolver el problema sin recurrir a modelos elásticos del mecanismo se necesitasimplificar dicha modelización de modo que desaparezcan diez incógnitas. De este modose obtendrá un modelo isostático que si es resoluble mediante las ecuaciones de la mecá-nica únicamente.Evidentemente dicha simplificación no puede realizarse de cualquier modo. Hay que selec-cionar las incógnitas a eliminar de tal modo que el modelo resultante de eliminar dichasincógnitas represente lo mejor posible la física del sistema completo.En este caso concreto si se analiza en profundidad el sistema se aprecia que las ligadurasque imponen los cilindros sobre los émbolos pueden eliminarse, ya que son redundantes.Esto es así porque la propia cinemática del sistema hace que la acción de los cilindrossobre los émbolos no sea necesaria para que estos mantengan su trayectoria, por lo quedichas fuerzas serán muy pequeñas y no afectaran grandemente al funcionamiento delsistema. La finalidad principal de los cilindros es contener al fluido de trabajo, no con-tribuir a la cinemática del mecanismo.De este modo si se eliminan las ligaduras que imponen los cilindros sobre los émbolos se
1
Figura 11.19: Modelización completa del mecanismo eliminando la ligadura que imponenlos cilindros.
obtiene un sistema hiperestático de grado dos. El esquema cinemático del modelo resul-tante puede verse en la figura 11.19.Para obtener un modelo isostático aún hay que eliminar dos incógnitas más. Esto puede
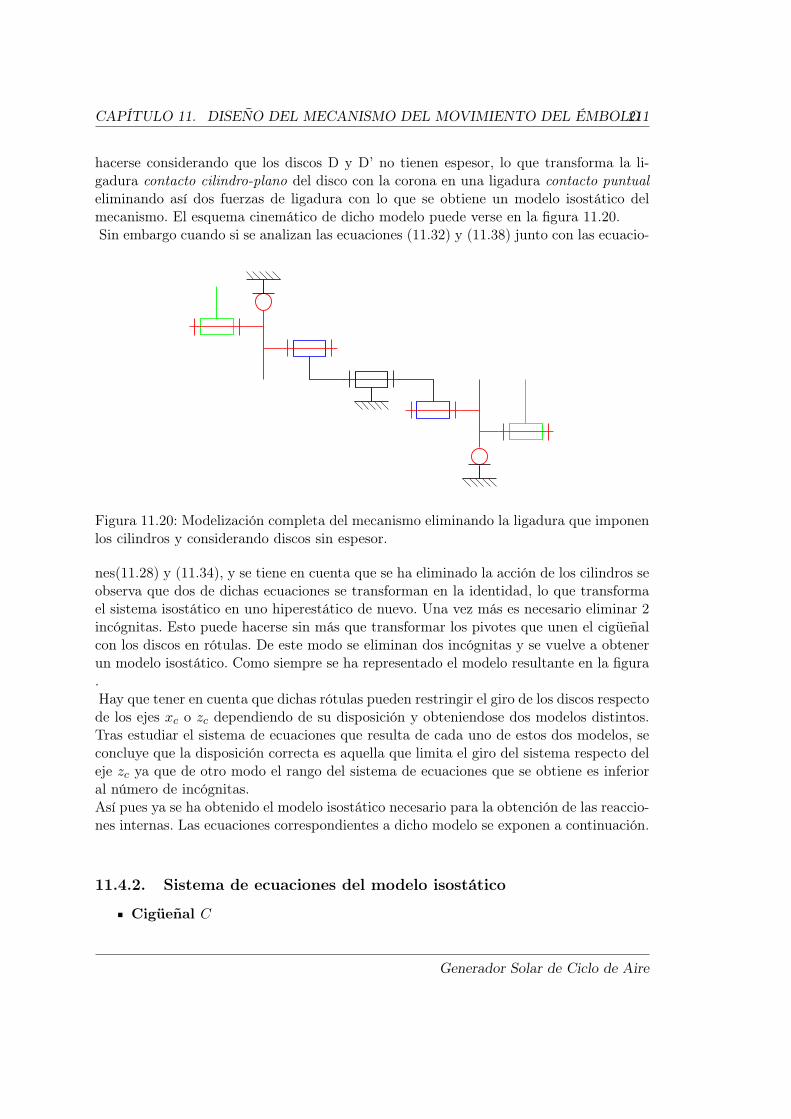
CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO211
hacerse considerando que los discos D y D’ no tienen espesor, lo que transforma la li-gadura contacto cilindro-plano del disco con la corona en una ligadura contacto puntualeliminando así dos fuerzas de ligadura con lo que se obtiene un modelo isostático delmecanismo. El esquema cinemático de dicho modelo puede verse en la figura 11.20.Sin embargo cuando si se analizan las ecuaciones (11.32) y (11.38) junto con las ecuacio-
1
Figura 11.20: Modelización completa del mecanismo eliminando la ligadura que imponenlos cilindros y considerando discos sin espesor.
nes(11.28) y (11.34), y se tiene en cuenta que se ha eliminado la acción de los cilindros seobserva que dos de dichas ecuaciones se transforman en la identidad, lo que transformael sistema isostático en uno hiperestático de nuevo. Una vez más es necesario eliminar 2incógnitas. Esto puede hacerse sin más que transformar los pivotes que unen el cigüeñalcon los discos en rótulas. De este modo se eliminan dos incógnitas y se vuelve a obtenerun modelo isostático. Como siempre se ha representado el modelo resultante en la figura.Hay que tener en cuenta que dichas rótulas pueden restringir el giro de los discos respectode los ejes xc o zc dependiendo de su disposición y obteniendose dos modelos distintos.Tras estudiar el sistema de ecuaciones que resulta de cada uno de estos dos modelos, seconcluye que la disposición correcta es aquella que limita el giro del sistema respecto deleje zc ya que de otro modo el rango del sistema de ecuaciones que se obtiene es inferioral número de incógnitas.Así pues ya se ha obtenido el modelo isostático necesario para la obtención de las reaccio-nes internas. Las ecuaciones correspondientes a dicho modelo se exponen a continuación.
11.4.2. Sistema de ecuaciones del modelo isostático
Cigüeñal C
Generador Solar de Ciclo de Aire

212 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
1
Figura 11.21: Modelización isostática del mecanismo .
• Fuerzas
xc : RSCx +R45t +R4′5′r sinβ +R4′5′t cosβ = 0 (11.40)zc : R45r +RSCz +R4′5′r cosβ −R4′5′t sinβ = 0 (11.41)
• Momentos
xc : MSCx +M4′5′z sinβ − l62R45r +
l62R4′5′r cosβ
− l62R4′5′t sinβ + JxyC θC − JyzC ˙θC
2= −JxyC θC
(11.42)
yc :R
2R45t +
R
2R4′5′t − T − IyC θC = IyC θC (11.43)
zc : MSCz +M45z +M4′5′z cosβ +l62R45t −
l62R4′5′t
cosβ
− l62R4′5′r sinβ + JyzC θC + JxyC
˙θC2
= −JyzC θC(11.44)
Disco D
• Fuerzas
xc : R23t −R54t +R13z sin θC = mDR
2θC (11.45)
zc : −R23n −R54r −R13z cos θC = −mDR
2˙θC
2(11.46)

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO213
• Momentos
xd : −M45z sin(2θC)−M13x cos θC + lDgR23t sin(2θC)+ lDgR23n cos(2θC) + (l4 − lDg)R54t sin(2θC)
− (l4 − lDg)R54r cos(2θC) + lDgR13z cos θC − JyzD ˙θC2
= 0
(11.47)
yd :R
2R23t −
R
2R13z sin θC + IyD θC = −IyD θC (11.48)
zd : −M45z cos(2θC) +M13x sin θC + lDgR23t cos(2θC)− lDgR23n sin(2θC)− lDgR13z sin θC + (l4 − lDg)R54r sin(2θC)
+ (l4 − lDg)R54t cos(2θC)− JyzD θC = JyzD θC
(11.49)
Disco D′
• Fuerzas
xc : R2′3′t−R5′4′t
+R1′3′z sin(θC + β) = mDR
2θC (11.50)
zc : −R2′3′n −R5′4′r −R1′3′z cos(θC + β) = −mDR
2˙θC
2(11.51)
• Momentos
xd′ : M4′5′z sin(2θC + 2β) +M1′3′x cos(θC + β)+ lDgR2′3′t
sin(2θC + 2β) + lDgR2′3′n cos(2θC + 2β)
+ (l4 − lDg)R5′4′tsin(2θC + 2β)− (l4 − lDg)R5′4′r cos(2θC + 2β)
+ lDgR1′3′z cos(θC + β)− JyzD ˙θC2
= 0
(11.52)
yd′ : − R
2R2′3′t
− R
2R1′3′z sin(θC + β)− IyD θC = IyD θC (11.53)
zd′ : −M4′5′z cos(2θC + 2β) +M1′3′x sin(θC + β)− lDgR2′3′t
cos(2θC + 2β) + lDgR2′3′n sin(2θC + 2β)− lDgR1′3′z sin(θC + β)
− (l4 − lDg)R5′4′r sin(2θC + 2β)− (l4 − lDg)R5′4′tcos(2θC + 2β)
+ JyzD θC = −JyzD θC(11.54)
Émbolo E
• Fuerzas
xe : R31x = 0 (11.55)ye : R31y = 0 (11.56)
ze : R31z − FE = −mER(θC sin θC + ˙θC2
cos θC) (11.57)
Generador Solar de Ciclo de Aire

214 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
• Momentos
xe : lEgR31z +M31x = 0 (11.58)ze : M31z = 0 (11.59)
Émbolo E′
• Fuerzas
xe : R3′1′x = 0 (11.60)ye : R3′1′y = 0 (11.61)
ze : R3′1′z − FE′ = −mE′R(θC sin(θC + β) + ˙θC2
cos(θC + β)) (11.62)
• Momentos
xe : lEgR3′1′z +M3′1′x = 0 (11.63)ze : M3′1′z = 0 (11.64)
Este sistema de ecuaciones algebraico-diferenciales se transforma en un sistema linealde ecuaciones algebraicas si se hace la hipótesis de velocidad angular constante (θC =0, ˙θC = ω) como ya se hizo en la sección 11.3. La resolución de este sistema para variosvalores de los parámetros permitirá la optimización de esos parámetros.Estudiando las ecuaciones se ve que aparecen en ellas los siguientes parámetros geomé-tricos y másicos: β, R, l6, l4, lDg, lEg, mE , mD, ω. Se va a estudiar la variación de lasreacciones internas con cada uno de ellos lo que permitirá establecer criterios para eldiseño y finalmente fijar sus valores finales.
11.4.3. Influencia de la longitud del cigueñal (l6)
En las figuras 11.22, 11.23, 11.24 y 11.25 se ha representado la variación del valormáximo de las reacciones con la longitud del cigüeñal (l6).Analizando las figuras se observa que la longitud del cigüeñal solo afecta a los momentos
de reacción sobre el soporte del cigüeñal. Sin embargo un incremento de la longitudpermite también distribuir los apoyos de modo que compensen dicho incremento. Porlo tanto puede considerarse que la longitud del cigüeñal no influye sobre el valor de lasreacciones. Puesto que una longitud menor significa un volumen y peso menores, se hade intentar siempre reducir dicha longitud, que será siempre la mínima necesaria paraalbergar las piezas necesarias (en particular para la transmisión de potencia al generador).

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO215
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5x 10
4
Longitud del cigueñal (l6) [m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5x 10
4
Mom
ento
s [N
m]
R
SCx
RSC
z
MSC
x
MSC
z
Figura 11.22: Reacciones máximas sobre el soporte del cigüeñal.
Generador Solar de Ciclo de Aire

216 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.5
1
1.5
2x 10
4
Longitud del cigueñal (l6) [m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1129
130
131
132
Mom
ento
s [N
m]
R
45r
R45
t
M45
z
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10x 10
4
Longitud del cigueñal (l6) [m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1156
158
160
Mom
ento
s [N
m]
R
45r
*
R45
t
*
M45
z
*
Figura 11.23: Reacciones máximas entre los discos y el cigüeñal.
11.4.4. Influencia de la distancia de los discos a los émbolos (lEg)
En las figuras 11.26, 11.27, 11.28 y 11.29 se representa la variación del valor máximode las reacciones con la distancia émbolos discos (lEg).

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO217
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4
5x 10
4
Longitud del cigueñal (l6) [m]
Fue
rzas
[N]
R
23n
R23
t
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 11.1
1.2
1.3
1.4
1.5
1.6
1.7x 10
4
Longitud del cigueñal (l6) [m]
Fue
rzas
[N]
R
23n
*
R23
t
*
Figura 11.24: Reacciones máximas entre los discos y las coronas.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 16577.5
6578
6578.5
6579
6579.5
6580
Longitud del cigüeñal (l6) [m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 147
47.5
48
48.5
49
49.5
Mom
ento
s [N
m]
R31
z
M31x
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12175.5
2176
2176.5
2177
2177.5
2178
Longitud del cigüeñal (l6) [m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1715
715.5
716
716.5
717
717.5
Mom
ento
s [N
m]
R31
z
* M31x
*
Figura 11.25: Reacciones máximas entre los discos y los émbolos.
Generador Solar de Ciclo de Aire

218 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2x 10
6
lEg
[m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2x 10
5
Mom
ento
s [N
m]
R
SCx
RSC
z
MSC
x
MSC
z
Figura 11.26: Reacciones máximas sobre el soporte del cigüeñal.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5x 10
5
lEg
[m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5000
Mom
ento
s [N
m]
R
45r
R45
t
M45
z
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3x 10
6
lEg
[m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2000
4000
6000
Mom
ento
s [N
m]
R
45r
*
R45
t
*
M45
z
*
Figura 11.27: Reacciones máximas entre los discos y el cigüeñal.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO219
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8
10
12
14x 10
5
lEg
[m]
Fue
rzas
[N]
R
23n
R23
t
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
3.5x 10
5
lEg
[m]
Fue
rzas
[N]
R
23n
*
R23
t
*
Figura 11.28: Reacciones máximas entre los discos y las coronas.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 16578.841
6578.841
6578.841
lEg
[m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
500
1000
Mom
ento
s [N
m]
R
31z
M31
x
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12176.6628
2176.6628
2176.6628
2176.6628
lEg
[m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5000
10000
15000
Mom
ento
s [N
m]
R
31z
* M31
x
*
Figura 11.29: Reacciones máximas entre los discos y los émbolos.
Generador Solar de Ciclo de Aire

220 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
11.4.5. Influencia del régimen de giro ( ˙θC)
Ahora se va a estudiar la influencia del régimen de giro. En las figuras 11.30, 11.31,11.32 y 11.33 se ha representado la variación del valor máximo de las reacciones condicho régimen ( ˙θC). En este caso además de representar cada fuerza por separado se hanrepresentado los módulos de las fuerzas y momentos en las figuras 11.34 y 11.35 ya quepermite apreciar mejor la evolución.Puede verse como casi todas las reacciones aumentan exponencialmente con el régimende giro, aunque hay dos que presentan un mínimo en el entorno de las 2.000 r.p.m. Ya sevio en la sección 11.3 como la potencia también dependía linealmente del régimen de giro.Así pues aunque sería conveniente reducir el régimen para disminuir así las reacciones,hay que tener en cuenta que dicha disminución también conlleva una disminución en lapotencia. Habrá que adoptar un compromiso entre ambos aspectos. A la vista de lasgráficas parece que el valor elegido de 3.000 r.p.m. es una buena pues las reacciones nose incrementan en gran medida por estar en la parte más plana de la curva y permiteobtener un buen valor de potencia.
1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1
0
1
2
3
4x 10
5
r.p.m.
Fue
rzas
[N]
1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
0.5
1
1.5
2
2.5x 10
4
Mom
ento
s [N
m]
RSCx
RSCz
MSCx
MSCz
Figura 11.30: Reacciones máximas sobre el soporte del cigüeñal.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO221
1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
r.p.m.
Fue
rzas
[N]
1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
200
400
600
800
1000
1200
1400
1600
Mom
ento
s [N
m]
R45r
R45t
M45z
1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4x 10
5
r.p.m.
Fue
rzas
[N]
1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
500
1000M
omen
tos
[Nm
]
R45r
*
R45t
*
M45z
*
Figura 11.31: Reacciones máximas entre los discos y el cigüeñal.
Generador Solar de Ciclo de Aire

222 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
1
2
3
4
5x 10
5
r.p.m.
Fue
rzas
[N]
R23n
R23t
1000 2000 3000 4000 5000 6000 7000 8000 9000 100000.5
1
1.5
2
2.5x 10
4
r.p.m.
Fue
rzas
[N]
R23n
*
R23t
*
Figura 11.32: Reacciones máximas entre los discos y las coronas.
1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2
4
6x 10
4
r.p.m.
Fue
rzas
[N]
1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−1000
0
1000
2000
Mom
ento
s [N
m]
R31z
M31x
1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−2
0
2
4
6x 10
4
r.p.m.
Fue
rzas
[N]
1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
500
1000
1500
2000
Mom
ento
s [N
m]
R31z
*M31x
*
Figura 11.33: Reacciones máximas entre los discos y los émbolos.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO223
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
1
2
3
4
5
6
7x 10
5
r.p.m.
Fue
rzas
[N]
�������� ������� �������� �������� ��������� �������� ��������� �
Figura 11.34: Módulos de las fuerzas de reacción.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
r.p.m.
Mom
ento
s [N
m]
�������� ������� �������� �������� �� �� ��� �
Figura 11.35: Módulos de los momentos de reacción.
Generador Solar de Ciclo de Aire

224 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
11.4.6. Influencia del radio de la corona (R)
En las figuras 11.36, 11.37, 11.38 y 11.39 se han representado la variación del valormáximo de las reacciones con el radio (R). También se han representado los módulos delas fuerzas y momentos en las figuras 11.40 y 11.41.Analizando dichas figurasse ve que la mayoría de las reacciones presentan un mínimopara un valor del radio (R) de alrededor de 10 cm, obteniendo reacciones mayores paravalores del radio de la corona superiores e inferiores. Esto permite justificar la elecciónque se hizo para dicho valor en la sección 11.3. En ella se vio como el valor del radio notenía influencia sobre la potencia obtenida, se observa ahora como sin embargo si queinfluye sobre el valor de las recciones. Queda pues justificada la elección del valor de 10cm para el radio de la corona.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
0
1
2
3x 10
5
Radio de la corona [m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4x 10
4
Mom
ento
s [N
m]
R
SCx
RSC
z
MSC
x
MSC
z
Figura 11.36: Reacciones máximas sobre el soporte del cigüeñal.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO225
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4x 10
5
Radio de la corona [m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
500
1000
Mom
ento
s [N
m]
R
45r
R45
t
M45
z
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6x 10
5
Radio de la corona [m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
500
1000
1500
Mom
ento
s [N
m]
R
45r
*
R45
t
*
M45
z
*
Figura 11.37: Reacciones máximas entre los discos y el cigüeñal.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4x 10
5
Radio de la corona [m]
Fue
rzas
[N]
R
23n
R23
t
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2x 10
5
Radio de la corona [m]
Fue
rzas
[N]
R
23n
*
R23
t
*
Figura 11.38: Reacciones máximas entre los discos y las coronas.
Generador Solar de Ciclo de Aire

226 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8x 10
4
Radio de la corona [m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−500
0
500
1000
1500
Mom
ento
s [N
m]
R
31z
M31
x
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
0
1x 10
5
Radio de la corona [m]
Fue
rzas
[N]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2000
4000
Mom
ento
s [N
m]
R
31z
* M31
x
*
Figura 11.39: Reacciones máximas entre los discos y los émbolos.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4
5
6
7
8
9x 10
5
Radio de la corona (R) [m]
Fue
rzas
[N]
�������� ������� �������� �������� ��������� �������� ��������� �
Figura 11.40: Módulos de las fuerzas de reacción.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO227
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4
5
6
7x 10
4
Radio de la corona (R) [m]
Mom
ento
s [N
m]
�������� ������� �������� �������� �� �� ��� �
Figura 11.41: Módulos de los momentos de reacción.
11.4.7. Influencia de la masa de los discos (mD)
En las figuras 11.42, 11.43, 11.44 y 11.45 se representan la variación del valor máximode las reacciones con la masa de los discos (mD). También se han representado los módulosde las fuerzas y momentos en las figuras 11.46 y 11.47.Se observa como a pesar de que parece que el aumento de peso de los discos incrementael valor de las reacciones, en realidad lo único que hace es modificar la distribución de lasmismas entre ambos lados del mecanismo. Por ejemplo si en la figura 11.46 se toman lascurvas correspondientes a |~F45| y |~F4′5′ | se observa que mientras una incrementa la otradisminuye, manteniendose la suma de ambas constante; y lo mismo ocurre para |~F23| y|~F2′3′ |. Este fenomeno se aprecia muy bien también en la figura 11.47 donde se observaque el módulo de todos los momentos (salvo el que se ejerce sobre el soporte del cigüeñalse mantienen constantes).Cabe concluir que un incremento en la masa de los discos solo perjudica claramente alsoporte del cigüeñal cuyas reacciones si que se incrementan linealmente con dicho peso.Sin embargo dicho problema no es tan grave como el incremento de otras reacciones yaque el soporte puede dimensionarse adecuadamente para soportar grandes cargas. Por lotanto aunque la reducción del peso de los discos sea deseable, no es tan crítica como laminimización de la masa de los émbolos como se verá a continuación.
Generador Solar de Ciclo de Aire

228 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
0 1 2 3 4 5 6 7 8 9 10−1
0
1
2
3
4
5
6
7x 10
4
Masa de los discos (mD
) [kg]
Fue
rzas
[N]
0 1 2 3 4 5 6 7 8 9 102000
3000
4000
5000
6000
7000
8000
9000
10000
Mom
ento
s [N
m]
R
SCx
RSC
z
MSC
x
MSC
z
Figura 11.42: Reacciones máximas sobre el soporte del cigüeñal.
0 1 2 3 4 5 6 7 8 9 100
2
4
6x 10
4
Masa de los discos (mD
) [kg]
Fue
rzas
[N]
0 1 2 3 4 5 6 7 8 9 10201.7525
201.7525
201.7525
201.7525
Mom
ento
s [N
m]
R
45r
R45
t
M45
z
0 1 2 3 4 5 6 7 8 9 100
5
10
15x 10
4
Masa de los discos (mD
) [kg]
Fue
rzas
[N]
0 1 2 3 4 5 6 7 8 9 10258.5804
258.5804
258.5804
258.5804
Mom
ento
s [N
m]
R
45r
*
R45
t
*
M45
z
*
Figura 11.43: Reacciones máximas entre los discos y el cigüeñal.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO229
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12x 10
4
Masa de los discos (mD
) [kg]
Fue
rzas
[N]
R
23n
R23
t
0 1 2 3 4 5 6 7 8 9 101.5
2
2.5
3
3.5
4
4.5
5x 10
4
Masa de los discos (mD
) [kg]
Fue
rzas
[N]
R
23n
*
R23
t
*
Figura 11.44: Reacciones máximas entre los discos y las coronas.
0 1 2 3 4 5 6 7 8 9 106578.841
6578.841
6578.841
6578.841
Masa de los discos (mD
) [kg]
Fue
rzas
[N]
0 1 2 3 4 5 6 7 8 9 1048.482
48.482
48.482
48.482
Mom
ento
s [N
m]
R
31z
M31
x
0 1 2 3 4 5 6 7 8 9 102176.6628
2176.6628
2176.6628
2176.6628
2176.6628
2176.6628
Masa de los discos (mD
) [kg]
Fue
rzas
[N]
0 1 2 3 4 5 6 7 8 9 10716.0756
716.0756
716.0756
716.0756
716.0756
716.0756
Mom
ento
s [N
m]
R
31z
* M31
x
*
Figura 11.45: Reacciones máximas entre los discos y los émbolos.
Generador Solar de Ciclo de Aire

230 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
0 1 2 3 4 5 6 7 8 9 100
5
10
15x 10
4
Masa de los discos (mD
) [kg]
Fue
rzas
[N]
�������� ������� �������� �������� ��������� �������� ��������� �
Figura 11.46: Módulos de las fuerzas de reacción.
0 1 2 3 4 5 6 7 8 9 100
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
Masa de los discos (mD
) [kg]
Mom
ento
s [N
m]
�������� ������� �������� �������� �� �� ��� �
Figura 11.47: Módulos de los momentos de reacción.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO231
11.4.8. Influencia de la masa de los émbolos (mE)
En las figuras 11.48, 11.49, 11.50 y 11.51 se ha representado la variación del valormáximo de las reacciones con la masa de los émbolos (mE). Se ha supuesto que la masade ambos émbolos es la misma. También se han representado los módulos de las fuerzasy momentos en las figuras 11.52 y 11.53.A la vista de las gráficas la conclusión es clara: la masa de los émbolos es altamenteperjudicial para el mecanismo. Deben diseñarse de tal modo que se pueda reducir sumása al mínimo posible. En este caso no existe ningún problema relativo a la potenciapuesto que como ya se vio en la sección 11.3.2 la potencia es totalmente independientede dicha masa. Así pues puede concluirse que la reducción de la masa de los émbolos esuna prioridad en el diseño de los mismos.
0 1 2 3 4 5 6 7 8 9 100
1
2x 10
6
Masa de los émbolos (mE) [kg]
Fue
rzas
[N]
0 1 2 3 4 5 6 7 8 9 100
5
10x 10
4
Mom
ento
s [N
m]
R
SCx
RSC
z
MSC
x
MSC
z
Figura 11.48: Reacciones máximas sobre el soporte del cigüeñal.
Generador Solar de Ciclo de Aire

232 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
0 1 2 3 4 5 6 7 8 9 100
5
10x 10
4
Masa de los émbolos (mE) [kg]
Fue
rzas
[N]
0 1 2 3 4 5 6 7 8 9 100
2000
4000
Mom
ento
s [N
m]
R
45r
R45
t
M45
z
0 1 2 3 4 5 6 7 8 9 100
5
10
15x 10
5
Masa de los émbolos (mE) [kg]
Fue
rzas
[N]
0 1 2 3 4 5 6 7 8 9 100
1000
2000
3000
Mom
ento
s [N
m]
R
45r
*
R45
t
*
M45
z
*
Figura 11.49: Reacciones máximas entre los discos y el cigüeñal.
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12x 10
5
Masa de los émbolos (mE) [kg]
Fue
rzas
[N]
R
23n
R23
t
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
3.5x 10
4
Masa de los émbolos (mE) [kg]
Fue
rzas
[N]
R
23n
*
R23
t
*
Figura 11.50: Reacciones máximas entre los discos y las coronas.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO233
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
14
16x 10
4
Masa de los émbolos (mE) [kg]
Fue
rzas
[N]
0 1 2 3 4 5 6 7 8 9 10−2000
−1000
0
1000
2000
3000
4000
5000
6000
Mom
ento
s [N
m]
R
31z
M31
x
0 1 2 3 4 5 6 7 8 9 10−5
0
5
10x 10
4
Masa de los émbolos (mE) [kg]
Fue
rzas
[N]
0 1 2 3 4 5 6 7 8 9 100
2000
4000
6000
Mom
ento
s [N
m]
R
31z
* M31
x
*
Figura 11.51: Reacciones máximas entre los discos y los émbolos.
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12x 10
5
Masa de los émbolos (mE) [kg]
Fue
rzas
[N]
�������� ������� �������� �������� ��������� �������� ��������� �
Figura 11.52: Módulos de las fuerzas de reacción.
Generador Solar de Ciclo de Aire

234 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7x 10
4
Masa de los émbolos (mE) [kg]
Mom
ento
s [N
m]
�������� ������� �������� �������� �� �� ��� �
Figura 11.53: Módulos de los momentos de reacción.
11.4.9. Resumen de resultados: conclusiones y representación de lasreacciones
A lo largo de las secciones anteriores se ha estudiado la influencia de diversos pará-metros sobre las reacciones internas del mecanismo y de dicho estudio se han extraidodiversas conclusiones que se resumen aquí.
La longitud del cigüeñal (l6) no afecta en absoluto al valor de las reacciones internas.Su minimización debe tomarse en cuenta a efectos de reducción de peso y volumen,pero no influye sobre las reacciones internas del mecanismo, y por tanto sobre lavida y fiabilidad del mismo.
La influencia de la distancia del centro de masas de los émbolos al punto de uniónen los discos (lEg) es muy grande. La minimización de dicha distancia ha de seruna prioridad en el diseño del mecanismo. Hay que tener en cuenta de todos modosque dicha minimización se verá condicionada por consideraciones constructivas.
El régimen de giro ( ˙θC) tiene también una gran influencia sobre las reaccionesinternas, presentando estas un mínimo para un régimen de giro de alrededor de2.000 r.p.m. A la hora de su elección habrá que tener en cuenta que el régimentambién influye sobre la potencia por lo que habrá que adoptar un compromiso.
El radio de la corona (R) también afecta a las reacciones. El mínimo valor de estas

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO235
se produce para valores del radio comprendidos entre 70 y 120 mm, dependiendode la fuerza considerada. La elección del radio (R) deberá estar entre estos valores.
La masa de los émbolos (mE) es muy perjudicial para el mecanismo y su minimi-zación ha de ser otra prioridad en el diseño. Evidentemente dicha minimización hade hacerse teniendo en cuenta las limitaciones estructurales, ya que los émblos hande ser capaces de soportar las temperaturas y presiones a las que están sometidos.
La masa de los discos (mD) solo es perjudicial para el soporte del cigüeñal, ya quesu incremento produce un incremento en las cargas que este soporta. Por lo tantosu minimización es deseable pero no prioritaria.
Todas estas consideraciones han de tenerse en cuenta a la hora de seleccionar los pa-rámetros geométricos del mecanismo. En particular puede decirse que por un lado seha justificado la elección de parámetros que se se realizo en la sección 11.3. Por otrose tiene que los siguientes parámetros han de intentar minimizarse lo máximo posible:lEg, l4 y l6. Sin embargo aún no se puede asignarles valores concretos puesto que dichasdimensiones han de ser compatibles con otras consideraciones constructivas (han de serlo suficientemente grandes para alojar los dispositivos del motor).Otros parámetros no han sido mencionados aún, como puedan ser los distintos diametrosde los ejes del cigüeñal y los discos. Esto se debe a que su determinación se debe hacerteniendo en cuenta otras consideraciones como son la vida y la fatiga.Para el estudio de la viga y la fatiga es necesario conocer exactamente el valor de lasreacciones por lo que a continuación se representa la evolución de las mismas a lo largo deun ciclo para. Para ello se tomarán los valores de los parámetros que se han determinadohasta el momento y se estimarán aquellos para los que todavía no se ha asignado unvalor.
Parámetros ya determinados
• Radio de la corona R = 10cm.
• Ángulo de desfase β = 90
• Cilindrada Cilindrada = 1000c.c.
• Régimen de giro n = 3000r.p.m.
• Áreas de los cilindros A0 = 1923cm2 y A0′ = 3077cm2
Parámetros estimados
• Unión discos-cigüeñal l4 = 5cm y d4 = 4 cm.
• Distancia émbolos-discos lEg = 7 cm.
• Posición centro de masas de los discos lDg = 8 mm.
• Masa de los discos mD = 1,2 kg.
• Masa de los émbolos mE = 0,7 kg.
Generador Solar de Ciclo de Aire

236 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
Con estos parámetros se obtienen las curvas de las reacciones para un ciclo. Dichas curvaspueden verse en las figuras 11.54, 11.55, 11.56, 11.57, 11.58 y 11.59. Los valores obtenidosa partir de estas figuras se usarán en el estudio de vida y fatiga del mecanismo que sedesarrolla en el capítulo ??.
0 1 2 3 4 5 6 7−4
−2
0
2x 10
4
θC [rad]
Fue
rzas
[N]
0 1 2 3 4 5 6 7−1000
0
1000
2000
Mom
ento
s [N
m]
RSC
x
RSCz
MSCx
MSCz
Figura 11.54: Reacciones máximas sobre el soporte del cigüeñal.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO237
0 1 2 3 4 5 6 7−1
0
1x 10
4
θC [rad]
Fue
rzas
[N]
0 1 2 3 4 5 6 7−1000
0
1000
Mom
ento
s [N
m]
R45
r
R45t
M45z
0 1 2 3 4 5 6 7−1
0
1
2
3x 10
4
θC [rad]
Fue
rzas
[N]
0 1 2 3 4 5 6 7−1500
−1000
−500
0
500
Mom
ento
s [N
m]
R45r
*
R45t
*M45
z
*
Figura 11.55: Reacciones máximas entre los discos y el cigüeñal.
0 1 2 3 4 5 6 7−5000
0
5000
10000
15000
Fue
rzas
[N]
R23n
R23t
0 1 2 3 4 5 6 7−1
0
1
2x 10
4
θC [rad]
Fue
rzas
[N]
R23
n
*
R23t
*
Figura 11.56: Reacciones máximas entre los discos y las coronas.
Generador Solar de Ciclo de Aire

238 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS
0 1 2 3 4 5 6 7−2000
0
2000
4000
6000
8000
θC [rad]
Fue
rzas
[N]
0 1 2 3 4 5 6 7−400
−300
−200
−100
0
100
Mom
ento
s [N
m]
R31z
M31x
0 1 2 3 4 5 6 7−2
−1
0
1x 10
4
θC [rad]
Fue
rzas
[N]
0 1 2 3 4 5 6 7−500
0
500
1000
Mom
ento
s [N
m]
R31z
*M31x
*
Figura 11.57: Reacciones máximas entre los discos y los émbolos.
0 1 2 3 4 5 6 70
0.5
1
1.5
2
2.5x 10
4
θC [rad]
Fue
rzas
[N]
�������� �
������ �
������� �
������� �
�������� �
������� �
�������� �
Figura 11.58: Módulos de las fuerzas de reacción.

CAPÍTULO 11. DISEÑO DEL MECANISMO DEL MOVIMIENTO DEL ÉMBOLO239
0 1 2 3 4 5 6 70
200
400
600
800
1000
1200
1400
1600
1800
θC [rad]
Mom
ento
s [N
m]
�������� �
������ �
������� �
������� �
�������� �
Figura 11.59: Módulos de los momentos de reacción.
Generador Solar de Ciclo de Aire

240 11.4. ANÁLISIS DE LAS REACCIONES INTERNAS

Capítulo 12
Estudio de las pérdidas de carga delsistema
Esta sección identifica las posibles fuentes de péridas de carga ya sean debidas a lasfuerzas de rozamiento entre superficies sólidas o por las pérdias de carga por la viscosidaddel fluido de trabajo y de los lubricantes empleados.
12.1. Pérdidas debidas a la conducción del fluido de trabajo
Los modelos más sencillos ignoran la viscosidad del fluido y la disipación de energíaque ello implica. Es quizás la perturbación más importante en lo que respecta al funcio-namiento del motor. Si la pérdida por conducción consume una porción significativa dela potencia los modelos que hemos escogido para simular el sistema serán imprecisos.
La pérdida de carga dentro del motor puede estimarse mediante correlaciones aplica-bles a flujos turbulentos en régimen cuasi estacionario.
Para calcularlo podemos realizar el siguiente modelo:
Cuando el fluido se encuentra mayoritariamente en uno de los dos cilindros lasvelocidades de conducción son prácticamente nulas. Teniendo en cuenta que laspérdidas correlan con la velocidad de conducción al cuadrado podemos considerarque la pérdida de carga durante estos instantes es descpreciable
Cuando el fluidos se mueve de un cilindro a otro la velocidad característica delmovimiento de fluido es aproximadamente la velocidad a la que un cilindro se vacíay el otro se llena respectivamente. Esta velocidad, que depende del régimen de giro,del diámetro característico del regenerador y del volúmen de los cilindros es undato para el cálculo de las pérdidas de carga.
A su vez, en el regenerador los procesos de transferencia de calor provocan cambios depresión, algo que se puede demostrar de manera trivial con la ecuación de estado. Enmuchos casos puede ser necesario dividir el regenerador en zonas de temperatura igual
241

242 12.2. PÉRDIDAS DE CARGA EN EL CILINDRO CALIENTE Y FRÍO.
o parecida y aplicar la hipótesis de flujo cuasi estacionario por separado en cada una deellas.
Las correlaciones a emplear para el cálculo de cada una de las pérdidas en cada unade las zonas por donde pasa el fluido se darán a continuación.
12.1.1. Pérdida de carga en el regenerador
La fórmula dada por Kays y London en [WIK] nos da la pérdida de presión para unamatriz de tubos, nuestro regenerador propuesto:
∆p =m2
2ρ
[(1 +
(AfAm
)2)(
ρ1
ρ2 − 1
)+cfLρ1
hρ
]
Donde cada una de las variables es, respectivamente
∆p Pérdida de carga
m Flujo másico que pasa pro el regenerador
Af Área de la conducción de fluido
Am Área frontal del regenerador
cf Coeficiente de fricción
L Longitud del regenerador
ρ Densidades.
h Diámetro hidráulico
Tanto si el regenerador tiene una geometría tubular como lineal, es importante conocerel régimen de funcionamiento mediante el número de Reynolds ya que puede ser laminaro turbulento. El coeficiente de fricción del movimiento se obtiene del anterior parámetroy del diámetro hidráulico utilizando el diagrama de Moody.
12.2. Pérdidas de carga en el cilindro caliente y frío.
Las caídas de presión en los dos cinlindros son, comunmente, mucho menores que lasocurridas en el regenerador.
12.2.1. Pérdidas en las zonas de calentamiento y enfriamiento.
La gran ventaja del análisis de estas zonas es que el fluido reside en ellas, no lascruza. Sin embargo es un análisis terriblemente complicado y debe ser medido experi-mentalmente. Es una zona con fuertes gradientes de temperatura donde la variación de

CAPÍTULO 12. ESTUDIO DE LAS PÉRDIDAS DE CARGA DEL SISTEMA 243
Figura 12.1: Diagrama de Moody
Generador Solar de Ciclo de Aire

24412.3. PÉRDIDAS DEBIDAS A LA FRICCIÓN EN LOS CONTACTOS METÁLICOS.
densidades debidas al transporte de energía son un efecto dominante en el movimientodel fluido.
Mientras considerar que, en primera aproximación, la presión sólo cambia por efectode la variación de volumen, es acertado; el cálculo de las pérdidas dependen del valorde la velocidad y del efecto de temperatura en la zona de contacto sólido-fluido de valormucho más incierto.
12.3. Pérdidas debidas a la fricción en los contactos metá-licos.
La fricción debido al movimiento relativo de las piezas metálicas es muy difícil desimular con seguridad. Debe ser medido. Sin embargo la medida con un prototipo demotor es sencilla. Lo único necesario es hacer rodar el motor en vacío a un régimen bajoy constante. Entonces toda la potencia producida por el motor se destinará a vencer losesfuerzos de fricción metálicos.
Es muy importante realizar este ensayo a la temperatura de funcionamiento puestoque la dilatación térmica puede cambiar las medidas de ajuste y con ello la tolerancia enel movimiento de las piezas.
12.4. Pérdidas de calor.
El principio de funcionamiento de un motor térmico es utilizar un flujo de calorentre una fuente térmica a alta temperatura (la radiación solar, la combustión de unhidrocarburo...) y una fuente térmica de baja temperatura (refrigeración) para, medianteun ciclo de funcionamiento, obtener una potencia útil. Cualquier fuga de calor, ya seapor diseño del propio motor como por un motivo accidental, restará rendimiento a laimplementación mecánica.
Su modelización es sencilla: deben restarse de la energía proporcionada al motor, seadel tipo que sea. Los tipos de pérdidas térmicas son:
Regeneración
Transporte
Bombeo
Conducción en el cuerpo del motor
Conducción fuera del cuerpo del motor
Disipación térmica y radiación

CAPÍTULO 12. ESTUDIO DE LAS PÉRDIDAS DE CARGA DEL SISTEMA 245
12.4.1. Pérdida debida a la regeneración.
El regenerador en sí no es perfecto. No es que no lo sea por diseño sino que el segundoprincipio de la termodinámica impide que se pueda construir un regenerador ideal. Lamisión del regenerador es enfriar el fluido antes de llegar al cilindro frío y calentar elfluido antes de llegar al caliente. Todo el calor que no consiga proporcionar al fluidoserá considerado como una pérdida. La diferencia de temperaturas multiplicada por lacapacidad calorífica del fluido de trabajo por el régimen de giro es la potencia perdidapor unidad de tiempo
PT = ωcp∆T
La dificultad de aplicación de la fórmula anterior es que la capacidad calorífica delfluido, que tomamos como la capacidad a presión constante, no tiene exactamente estevalor. En realidad el proceso no será ni a presión ni a volumen constante así que nos esimposible fijar un valor para este coeficiente. Lo que sí sabemos es que este valor estarárelacionado con el exponente adiabático γ, puesto que cp = γcv. Entonces debemosdistinguir si se trata de un proceso a presión constante o a volumen constante, siendoligeramente más cercano al segundo si hacemos caso del ciclo Stirling ideal.
Lo que sucede dentro del regenerador es que parte del calor que el regenerador intentaproporcionar (o sustraer) al fluido no se destina a aumentar su temperatura. En partedicha energía se destina a aumentar o reducir la presión; un efecto que no puede niimpedirse ni descartarse. Este es otro efecto que impide de una manera teórica alcanzarel funcionamiento ideal del regenerador.
Para ello introduciremos una pérdida de potencia por compresibilidad de fórmula
Pc = ω∆p
ρ(γ − 1)
Donde:
∆p es la variación de presión de trabajo durante el proceso de regeneración.
Las dos pérdidas deben sumarse para llegar a la pérdida por regeneración total:
PR = Pc + PT
Este método de suponer ambos efectos como lineales tiene un error inherente, puestoque ambos están acoplados. En el informe de Crouthamel y Shelpuk [kay] se estima queel error pasa del 20% de no realizar ninguna corrección a aproximadamente el 5%.
12.4.2. Pérdida por transporte en el regenerador
Tanto el concepto como el método de cálculo han sido ya analizados en el apartado12.1.1.
Generador Solar de Ciclo de Aire

246 12.4. PÉRDIDAS DE CALOR.
12.4.3. Conducción en el cuerpo del motor.
Cuando la regeneración no es perfecta la temperatura en cada uno de los cilindrosdista de ser constante. Cuando el cilindro caliente se llena no lo hace a la temperaturade trabajo sino a una ligeramente inferior. Acto seguido las paredes, que se encuentrana la temperatura de la fuente térmica caliente, empiezan a proporcionar energía térmicaal fluido pero no sucede lo mismo con el émbolo.
El émbolo recibe energía de tres sitios
1. Los segmentos que le conectan con la camisa del cilindro conducen calor.
2. La transferencia de calor con el cárter por el reverso del émbolo.
3. La transferencia de calor por convección sobre la cara del cilindro con el fluido detrabajo.
Cuando el fluido entra, ligeramente frío, al cilindro se calienta hasta la temperatura detrabajo pero durante este tiempo en el que el proceso ha sido no estacionario ha enfriadoel émbolo. Entonces parte del calor que debería destinarse a calentar el fluido de trabajose ha destinado a calentar el émbolo enfriado previamente.
Este efecto, a parte de una pérdida de energía, representa un peligro para el funciona-miento del motor puesto que es una fuente esencial de fatiga térmica que puede provocary propagar grietas en los vértices del émbolo y en los segmentos.
La fórmula para cuantificar este efecto es
Qs =YkZkckg∆Tdd
Ldδ
Donde
Qs Pérdida de calor por transporte en el émbolo
Yf Respuesta en frecuencia de la pared del émbolo
Zk Factor de escala
c Carrera del pistón
kg Conductividad térmica del gas
∆T Diferencia de temperaturas en la zona
dd Diámetro del cilindro
Ld Longitud del émbolo
δ Espesor de las fugas.

CAPÍTULO 12. ESTUDIO DE LAS PÉRDIDAS DE CARGA DEL SISTEMA 247
Estudio Zk
Martini π/8Zimmerman π/5.4
Rios π/8White 0.186π
Cuadro 12.1: Valores de Zk
Las cantidades Zk e Yf están tabuladas y dependen en gran medida del experimento enel que se calcularon. Esto impone la necesidad técnica de calcular dichos exponentes parael nuevo motor. Sin embargo, para la fase de diseño en la que se encuentra el proyectoutilizaremos los valores proporcionados por [cro]
Para Yk utilizamos la fórmula sugerida también en [mar]
Yk =1 + xb1 + x2
b
Donde
Xb = 1 + 12πkg
(L4k1
+ L5k2
)L4,5 = 2π
√2d4,5ω
d4 Difusividad térmica
k1,2 Conductividades térmicas a ambos lados del desplazador
12.4.4. Pérdidas por conducción fuera del motor.
Hay que tener siempre en cuenta que la base del funcionamiento de un motor de ciclode aire es calentar una zona del mismo. El motor está a alta temperatura así que el calorpuede transferirse a cualquier elemento circundante sin que sea necesariamente la zonadesdeada. Como elemento circundante no sólo entendemos el ambiente, también el propiocuerpo del motor, el regenerador, la transmisión...
Como en otros casos, la gran variedad de fenómenos de conducción de calor posiblehace imprescindible medir distribuciones de temperatura sobre el cuerpo del motor.
Una medida interesante es el calor disipado por la propia refrigeración del motor.Cualquier conducción de calor que cambie la temperatura de la porción exactamenteintermedia entre la zona caliente y la zona fría deben estar a la temperatura promedio.
Por culpa de las pérdidas por conducción estas zonas presentarán una temperaturaligeramente mayor que debe paliarse refrigerando el cuerpo del motor de alguna manera.Esta potencia de refrigeración necesaria será la media de las pérdidas por conducción enel cuerpo del motor.
Otras pérdidas por conducción, como la que existe entre los cilindros y el ambiente, esprácticamente imposible de estimar y de medir. En muchos casos simplemente se ignoradiciendo que no es parte del funcionamiento del motor.
Generador Solar de Ciclo de Aire

248 12.4. PÉRDIDAS DE CALOR.
12.4.5. Pérdidas por radiación
No todo el calor que se proporciona a la zona caliente llega al cilindro. Una parte deeste calor se radia al exterior debido a la radiación de las superficie que se está calentando.Esta pérdida es cuantificable mediante la fórmula
Qr = fafnfm(π/4)Sσ(T 4c − T 4
e )
Donde
fa,m,n son los factores de área, forma y emisividad de la zona calentada
S es la superficie de la zona calentada
σes la constante de Stefann Boltzmann
Tces la temperatura de la zona caliente
Tees la temperatura exterior
12.4.6. Pérdidas por bombeo
Cuando el émbolo desplazador y el émbolo de potencia se mueven desplazan el fluidode trabajo aumentando su presión. Esto implica que al otro lado del cilindro respectivola presión será menor, el fluido se colará por los huecos que dejan con la camisa y existiráuna pérdida por bombeo.
Estas pérdidas pueden minimizarse mejorando el ajuste entre el émbolo y la camisadel cilindro. Se puede estimar con la siguiente fórmula
Qb =2(πdC)0.6Lb(∆pω−1cp)1.6∆Tδ2.6
1.5zR1.6g k0.6
g (0.5∆T )1.6
Donde
dC es el diámetro del cilindro
Lbes la longitud del cilindro respectivo
∆p es la diferencia de presión entre las dos caras del émbolo
cp es la capacidad calorífica del fluido
∆T es la diferencia de temperaturas entre las dos caras del émbolo
Rg es la constante de gas perfecto del fluido de trabajo
z es el factor de compresibilidad del fluido de trabajo

Capítulo 13
Diseño detallado del regenerador
13.1. DEFINICIÓN DE REGENERADOR
Un cambiador de calor regenerativo, o más comúnmente un regenerador, es un tipode cambiador de calor donde el flujo a través del cambiador de calor es cíclico y cam-bia periódicamente de sentido. Es similar a un cambiador de calor a contracorriente. Sinembargo, un regenerador mezcla los dos fluidos mientras que el cambiador de calor a con-tracorriente las mantiene separadas. El perfil de temperaturas permanece prácticamentea una temperatura constante, incluyendo que el fluido entra y sale respectivamente porcada extremo del mismo.
249

250 13.1. DEFINICIÓN DE REGENERADOR
Figura 13.1: Cambiador de calor de flujo paralelo y a contracorriente
En los cambiadores de calor regenerativos, el fluido en cada uno de los lados del cam-biador de calor es prácticamente siempre el mismo fluido. El fluido es reciclado a travésdel cambiador de calor, a menudo alcanzando altas temperaturas. El fluido puede teneruna etapa en la que circula por el exterior, y después volver hacia atrás a través del cam-biador de calor en sentido contrario para seguir con el resto de los procesos. Normalmentese realiza este proceso de forma repetitiva o cíclica. Por consiguiente, en los cambiadoresde calor regenerativos, el fluido de entrada a un proceso se calienta usando la energíacontenida en el fluido a causa de ser el fluido de salida de otro proceso. Los cambiadoresde calor regenerativos proporcionan un ahorro considerable de energía, porque la mayorparte de la energía térmica que se recicla nos hace aproximar las transformaciones quesuceden a las transformaciones teóricas reversibles. Este tipo de cambiador de calor puedetener un rendimiento térmico mayor del 90%, transferiendo casi toda la energía térmicarelativa desde uno de los flujos al otro. Sólo hay que suministrar una pequeña cantidadde calor al extremo caliente y extraer una pequeña cantidad de calor del extremo fríopara mantener constantes la muy alta y la muy baja temperatura.

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 251
Figura 13.2: Cambiador de calor directo y a contracorriente.
13.2. OTROS ASPECTOS SOBRE EL REGENERADOR:
El regenerador es la pieza fundamental del motor debido a que es la que más efectotiene en el rendimiento que podemos obtener del motor y es la que más complicacionestiene a la hora de diseñar, calcular y evaluar su funcionamiento e integración en el sistema.Para diseñar apropiadamente un cambiador de calor reversible es necesario realizar unaoptimización multivariable y tener en cuenta los niveles de turbulencia, efectos viscosos,su relación con las variaciones tan altas de temperatura, presión, velocidad etc...se haceun diseño muy complejo de esta parte del motor que es la más compleja con muchadiferencia, con lo que se recurre a la simulación numérica con software como “Fluent& Gambit” y se puede predecir su comportamiento de una forma aceptable. Otra delas complicaciones existentes en el diseño del regenerador es la pérdida de carga que seproduce por efectos viscosos en el conducto y la correspondiente pérdida de presión, queunida a la disminución de la temperatura por intercambio de calor, tiene unos efectosmuy importantes en la operación del motor.
Generador Solar de Ciclo de Aire

252 13.2. OTROS ASPECTOS SOBRE EL REGENERADOR:
Figura 13.3: Regenerador y su distribución de temperaturas típica
En un motor Stirling, el Regenerador es un cambiador de calor interno que de formatemporal, el calor allí almacenado, entre los cilindros de compresión y de potencia (entreel lado frío y el lado caliente del motor) se intercambia con el fluido operativo, primeropasa en un sentido y el fluido cede parte de su energía térmica que luego recupera alpasar en el otro sentido. Su función es retener el calor que sería intercambiado con elambiente (si no estuviese el regenerador) a temperatura intermedia entre la máxima yla mínima del ciclo, permitiendo que el rendimiento térmico se aproxime al de Carnot;definido por el cociente entre la máxima y la mínima temperatura del ciclo.
El efecto principal de la regeneración en un motor Stirling es incrementar de for-ma significativa el rendimiento “reciclando” internamente el calor que escaparía delmotor de forma irreversible hacia el ambiente. Como efecto secundario, el incre-mento del rendimiento térmico supone una mayor potencia de salida partiendo delas mismas temperatura máxima y mínima del ciclo, que son las temperaturas delos extremos caliente y frío del regenerador en el intercambio, pero, en la prácti-ca esta potencia adicional no se puede conseguir completamente debido a que losvolúmenes muertos y las pérdidas de presión inherentes a los regeneradores realestienen el efecto contrario.
El regenerador trabaja como un almacén térmico. El regenerador ideal tiene unacapacidad térmica muy alta, una conductividad térmica muy baja, apenas tiene

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 253
volumen y no introduce fricción en el fluido operativo, de forma que no oponeninguna resistencia en su paso a su través. A medida que el regenerador se aproximaa estos límites, el rendimiento del motor Stirling aumenta.
El objetivo de diseño del regenerador de un motor Stirling es proporcionar suficien-te capacidad de transferencia de calor sin introducir demasiado volumen adicionalinterno (que es volumen muerto porque no podemos modificarlo para seguir com-primiendo o expandiendo el fluido de trabajo) y sin introducir resistencia al paso;lo que tiende a reducir la potencia y la eficiencia. Estos conflictos de diseño sonuno de los muchos factores que limitan la eficiencia de los motores Stirling que serealizan en la práctica. Un diseño típico es un conjunto de tubos metálicos delga-dos, con diámetro interior pequeño para disminuir el volumen interior, y con el ejedel tubo perpendicular al flujo de gas para reducir la conducción en esa direccióny maximizar la transferencia convectiva de calor.
El regenerador es un componente clave inventado por Robert Stirling y su presenciadistingue un verdadero motor Stirling de otro motor de ciclo de aire caliente de ciclocerrado. Sin embargo, muchos motores que aparentemente no tienen regeneradorpueden ser descritos correctamente como motores Stirling como en las configura-ciones beta y gamma con un desplazador sin ligaduras (suelto), las superficies deldesplazador y su cilindro cíclicamente intercambia calor con el fluido de trabajoproporcionando un efecto regenerativo notable particularmente en los motores pe-queños que operan con presiones no demasiado elevadas. Lo mismo ocurre con elregenerador en forma de conducto conectando a los cilindros caliente y frío en laconfiguración alfa de los motores Stirling.
Generador Solar de Ciclo de Aire

254 13.3. EL PROBLEMA DEL REGENERADOR
Figura 13.4: Vista global del motor en la que figura el regnerador en la parte central (R)
13.3. EL PROBLEMA DEL REGENERADOR
El problema del regenerador, o problema conjugado del cambiador de calor es de-terminar las temperaturas Tg(t, x) del fluido y Tw(t, x) de la matriz, como funciones deltiempo y de la posición, desde el inicio del primer flujo, a través de los siguientes reflujoshasta el equilibrio cíclico.
El problema del diseño termodinámico. La dificultad que subyace en dotar desentido el diseño termodinámico del motor Stirling es el gran número de variables involu-cradas. El diseñador está tratando no sólo con el rendimiento (potencia, rpm y volúmenesmuertos), sino con las condiciones operativas (temperaturas, sobrepresiones), proporcio-nes termodinámicas (ángulo de desfase, relación de volúmenes), geometría del circuitode gas (número, diámetro, longitud de los tubos, etc...) y las propiedades del fluido detrabajo (constante del gas, coeficiente de viscosidad dinámica, conductividad térmica, yrelación de calores específicos).
Hay una relación agebraica para el rendimiento indicado ideal para los cuatro procesosque configuran el diagrama del ciclo: ηotto = 1 −
(1r
)γ−1; los motores de combustión

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 255
interna se escalan geométricamente: un motor con cilindros más grandes o más pequeñospuede ser hecho mediante una fotocopia reducida o aumentada del motor de trabajo, elprototipo, esperando de forma razonable que funcione directamente desde que se esboza,teniendo un rendimiento y una potencia específica parecidas a las del prototipo. A primeravista, el problema del diseño del motor Stirling es diferente: en lugar de un valor delcociente de calores específicos γ hay dos, uno para gases monoatómicos y otro paradiatómicos; así como muchos valores de la constante del gas R, conductividad térmica k, y el coeficiente de viscosidad dinámica µ , y tenemos que elegir un fluido de trabajo.Considerando que sólo hay una presión de referencia para los motores de combustióninterna con atmosféricos, para los motores Stirling la presión de carga puede se puedeestablecer a voluntad. Por otra parte, los motores Stirling, en efecto, escalan, aunque nogeométricamente, de un modo que precisamente está en paralelo con las ecuaciones:
ηotto = ηotto
{r, γ,
a
f,b
s, φign, φipo, φipc, φepo, φepc, ηv...
}powerottopatmVswf
= Notto
{NT , r, γ,
a
f,b
s, φign, φipo, φipc, φepo, φepc, ηv...
}en vez de la r y la γ del ciclo ideal de Otto, hay cuatro parámetros de diseño o de escalapara el ciclo ideal de Schmidt, NT , κ, α y un conjunto de relaciones de espacios muertos,δ:
Wstirling
patmVswf= NTF {NT , κ, α, y el conjunto de δ, ...}
el resto de los parámetros involucran velocidad, propiedades del fluido de trabajo yvolúmenes barridos.
Ventajas de los regeneradores Las ventajas de los regeneradores sobre los cambia-dores de calor a contracorriente es que tienen mucha mayor superficie para un volumendado, lo que proporciona un cambiador de calor de volumen reducido para una densidadde energía dada, efectividad y caída de presión. Esto hace que el regenerador sea máseconómico en términos de materiales y fabricación, en comparación con el cambiadorde calor a contracorriente. El diseño de los cabezales de entrada y salida utilizado paradistribuir los fluidos caliente y frío en la matriz es mucho más simple en los regeneradoresque en los cambiadores de calor. La razón es que ambas corrientes fluyen en seccionesdiferentes para los regeneradores rotativos y un fluido entra y sale de la matriz a la vezen los regeneradores de matriz fija. Además, los sectores de flujo para los fluidos calien-te y frío en los regeneradores rotativos se pueden diseñar para optimizar la pérdida depresión en los fluidos. Las superficies de la matriz de los regeneradores tienen tambiéncaracterísticas de auto-limpieza, reduciendo el ensuciamiento y la corrosión por la carapor la que se encuentra el fluido. Finalmente, las propiedades tales como la densidad desuperficie y la configuración a contracorriente de los regeneradores los hacen ideales paraaplicaciones de cambiadores de calor gas-gas, que requieren una eficiencia que supera el85%. El coeficiente de transferencia de calor es mucho menor en los gases que los líquidos,por lo que el área de las superficies aumenta enormemente la transferencia de calor.
Generador Solar de Ciclo de Aire

256 13.3. EL PROBLEMA DEL REGENERADOR
Figura 13.5: Ejemplo de Regenerador Real
Desventajas de los regeneradores La principal desventaja de un regenerador es quesiempre se mezcla una parte de la corriente de los dos fluidos, y no se pueden separar porcompleto. Hay una pequeña proporción de fluido inevitable en la otra de las corrientes.En regeneradores rotativos, el fluido arrastrado está atrapado dentro de anillo radial yla matriz, y en un regenerador de matriz fija, el fluido arrastrado es el que permaneceen el volumen vacío de la matriz. Esta pequeña proporción se mezclará con la otracorriente en la siguiente mitad del ciclo. Por tanto, los regeneradores solo se usan cuandose puede aceptar que las dos corrientes se mezclen. La mezcla de los flujos es común enaplicaciones de calor gas-gas y/o en aplicaciones de transferencia de energía, y menoscomún en líquidos o en fluidos que cambian de fase debido a que la contaminación estáterminantemente prohibida a menudo en corrientes de líquidos.

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 257
Figura 13.6: Otro ejemplo de Regenerador montado en un motor stirling Real
El Regenerador y el Rendimiento del Ciclo Stirling La base de cualquier análisisde ciclos termodinámicos, es el Primer Principio de la Termodinámica. En este casotenemos un fluido de trabajo de masa constante que para un proceso que comienza en“i” y finaliza en “j” se tiene:
Qij −Wij = Uj − Ui
donde:
Qij =Calor transferido al gas de trabajo cuando el fluido cambia del estado “i” alestado “j”.
Wij =∫pdV =Trabajo obtenido durante el proceso i→j
Ui =Energía interna del fluido de trabajo en el estado “i”.
En particular, para los procesos 2→3 el volumen no cambia y por tanto W23 = 0 yQ23 = U3 − U2 ; de forma análoga para el proceso 4→1 se tiene que Q41 = U1 − U4.
Si tomamos un fluido de trabajo para el cual la energía interna sólo depende dela temperatura, (líquidos y gases ideales, por ejemplo), las energías internas U3 y U4
son iguales, debido a que tienen la misma temperatura en el ciclo, (TH). Siguiendo unrazonamiento análogo se tiene que U2 = U1. Por tanto, Q41 = −Q23.
O en otras palabras, el calor que tenemos que evacuar del gas en el proceso 4→1puede ser utilizado para calentar el gas durante el proceso 2→3, que es exactamente lafunción del Regenerador.
Generador Solar de Ciclo de Aire

258 13.4. ANÁLISIS SIMPLIFICADO DEL REGENERADOR
Una vez que empleamos el Regenerador, la interacción del motor Stirling con susalrededores se restringe a recibir calor a temperatura TH y evacuar calor a temperaturaTC .
Con esto, el rendimiento termodinámico (relación entre el trabajo obtenido y el calorsuministrado) debe ser igual que el rendimiento del ciclo de Carnot: h = 1− TC
TH.
13.4. Análisis Simplificado del Regenerador
Por definición un regenerador es un dispositivo cíclico. En la primera parte del cicloel gas caliente fluye a través del regenerador desde el cambiador de calor de alta tempe-ratura hasta el de baja temperatura, y en este proceso se transfiere calor a la matriz delregenerador. A este proceso nos referimos como un proceso de flujo a través del regene-rador. Consecuentemente, durante la segunda parte del ciclo el gas frío fluye en sentidocontrario, absorbiendo el calor que previamente se había almacenado en la matriz delregenerador. Por tanto en régimen estacionario, el calor neto por ciclo entre el gas detrabajo y la matriz del regenerador es nulo.
La calidad del regenerador normalmente se define en base a la entalpía en términosdel rendimiento del regenerador ε como sigue:
ε =cambio actual entalpıa en el gas durante un paso por el regenerador
cambio teorico maximo equivalente entalpıa en regenerador ideal
sin embargo esta definición no es aplicable para los motores Stirling. Se han propuestouna definición equivalente en el contexto del modelo Adiabático Idela, que representa ellímite en la medida del máximo rendimiento, como sigue:
ε =cantidad calor transferida de la matriz al gas durante un paso a traves del regenerador
cantidad equivalente de calor transferido en modelo adiabatico en el regenerador
El rendimiento del regenerador ε por tanto, varía desde 1 en un regenerador ideal (comose define en el Modelo Adiabático Ideal) hasta 0 cuando el regenerador no actúa paranada.
El rendimiento térmico del ciclo Adiabático Idela (denotado con sufijo “i”), en términosde la energía acumulada al final del ciclo como:
ηi =Wi
Qhi=
(Qhi +Qki)Qhi
Ahora, para un sistema que tiene un regenerador que no es ideal, durante el procesode un flujo a través del mismo, cuando el gas de trabajo fluye desde el cambiador decalor de baja temperatura al de alta, a la salida del regenerador tendrá una temperaturaalgo menor que la del cambiador de calor de alta temperatura. Esto resultará en quehabrá que suministrar desde el exterior una mayor cantidad de calor por ciclo desde el

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 259
cambiador de calor de alta temperatura para incrementar la temperatura del gas en lasalida del cambiador de calor, que podemos escribir:
Qh = Qhi +Qri (1− ε)
De forma similar, cuando el gas de trabajo fluye desde el cambiador de calor de altatemperatura al de baja temperatura, se tendrá que evacuar una cantidad adicional decalor, como sigue:
Qk = Qki −Qri (1− ε)
El rendimiento térmico de un motor no ideal viene dado por :
η =W
Qh=Qh +QkQh
Sustituyendo las expresiones de Qk, Qh, ηi tenemos:
η =ηi[
1 +(Qri∗Qhi
)(1− ε)
]Nótese que como ε varía desde 1 en un regenerador ideal (Ciclo Adiabático Ideal)
hasta 0 para el caso en el que no hay acción regenerativa, el rendimiento térmico ηdecrece desde más del 60% hasta menos del 10%. Además, diferenciando en la ecuaciónpara el rendimiento
(dηdε
)y sustituyendo en el caso de ε = 1, tenemos:
dη
dε|ε=1 = ηi
Qri∗Qhi
Por tanto vemos que para una alta eficiencia en el regenerador, con un valor de εcercano a la unidad, una reducción del 1% en el rendimiento del regenerador se traduceen más de un 5% de reducción en el rendimiento térmico η. Además podemos apreciarque si se dispone de un regenerador con un rendimiento de 0,8; el rendimiento térmicoha descendido entre la mitad y el 30%. Esto no sólo significa una máquina notablementemenos eficiente, sino que se debe disponer de un cambiador de calor de baja temperaturabastante mayor. Obviamente necesitamos tener medios para determinar el rendimientoactual del regenerador en cualquier máquina específica.
Forma de evaluar el rendimiento en el Regenerador ε Ahora consideramos elrendimiento del Regenerador en términos del perfil de temeperaturas de las corrientes degas caliente y fría con respecto a la matriz del regenerador. Asumimos que una diferenciaigual en la temperatura ∆T en el lado caliente y frío, con un perfil de temperaturaslineal, da lugar a la siguiente definición del rendimiento del regenerador ε en términos delas temperaturas, como se muestra:
Combinando las dos ecuaciones de la figura, tenemos:
ε =1(
1 + 2∆T(Th1−Th2)
)Generador Solar de Ciclo de Aire

260 13.4. ANÁLISIS SIMPLIFICADO DEL REGENERADOR
Figura 13.7: Rendimiento del Regenerador en términos de las temperaturas
Ahora, teniendo en cuenta consideraciones sobre el balance de energia en la corrientecaliente, el cambio en la entalpía de la corriente caliente es igual al calor transferido desdela corriente caliente a la matriz del regenerador, y consecuentemente desde la matriz delregenerador a la corriente fría en la siguiente parte del ciclo, por tanto:
Q = cp·m (Th1 − Th2) = 2h·Awg∆T
donde Q es la potencia calorífica transmitida, h es el coeficiente de transferencia de calorglobal (corriente caliente / matriz del regenerador / corriente fría), Awg se refiere al áreamojada del cambiador de calor, cp es la capacidad térmica específica a presión constantey m
(kgs
)es el gasto másico a través del regenerador. Sustituyendo en la ecuación del
rendimiento del regenerador, tenemos:
ε =1(
1 + cpmh·Awg
)Introducimos ahora el concepto de NTU (“Number of Transfer Units”) que es una
medida muy comúnmente empleada en el rendimiento de cambiadores de calor, y sedefine como:
NTU =h·Awgcpm
Por tanto,
ε =NTU
1 +NTU
Hay que hacer notar que el valor del NTU viene dado en función del tipo de cambiadorde calor aso como su tamaño físico. Incluye el área mojada Awg , así como el gasto másico

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 261
instantáneo a través del regenerador m(kgs
). En el análisis de cambiadores de calor es
más común evaluar los parámetros del cambiador de calor que se esté empleando para lautilización en concreto en términos de las propiedades del fluido, que son independientesdel tamaó. Por tanto definimos el Número de Stanton, como:
NST =h
ρ·u·cp
donde ρ es la densidad del fluido, u es la velocidad, por tanto:
m = ρuA
donde A es el área libre por donde fluye el fluido a través de la matriz del regenerador.Existen tablas y gráficos que relacionan valores empíricos del número de Stanton y delnúmero de Reynolds en libros de texto de aplicaciones de cambiadores de calor de diversostipos.
13.5. SIMULACIONES NUMÉRICAS REALIZADAS PA-RA ESTUDIAR EL COMPORTAMIENTO DEL RE-GENERADOR
Para analizar el comportamiento del regenerador, se han hecho una serie de simula-ciones numéricas, de problemas más sencillos, como es el de la descarga del cilindro depotencia en el proceso de expansión (máxima carga térmica del motor) hacia el cilindrode compresión, a través del regenerador modelado como un conducto de área rectangular,muy achatado, para favorecer la relación ÁREA
VOLUMEN y para obtener un modelo sencilloteniendo en cuenta los efectos de la viscosidad y de la conducción de calor, pero sin ex-cesiva dificultad para que la simulación numérica fuese realista, ya que si introducimosun modelo excesivamente complejo en el software específico para este tipo de problemas,puede ocurrir que la solución no converja o que la solución que proporciona el softwareno se ajuste a la realidad.
El software que se ha utilizado para realizar las simulaciones numéricas es “Fluent6.2 & Gambit ”, que es ampliamente utilizado en aplicaciones de mecánica de fluidoscomputacional y su integración con otros software aplicados en estudios de estas mismasmaterias está ampliamente generalizado, como CATIA, etc...
Con todo esto se ha realizado el siguiente modelo muy simplificado del regenerador:
Se trata de un paralelepípedo de dimensiones (50 x 1 x 100) mm, que simula unconducto de dimensiones características de órdenes de magnitud muy diferentessegún los tres ejes, para poder evaluar de forma separada las variaciones de lasmagnitudes fluidas en las tres direcciones espaciales.
Se ha mallado con una función cuadrática (las celdas de los extremos son máspequeñas que las de los lados medios) para recoger mejor los detalles de las zonas
Generador Solar de Ciclo de Aire

26213.5. SIMULACIONES NUMÉRICAS REALIZADAS PARA ESTUDIAR EL
COMPORTAMIENTO DEL REGENERADOR
en las que los cambios en las magnitudes fluidodinámicas varían de forma másrápidamente.
Una imagen tridimensional de la malla del modelo generado se puede ver a continuación:
Figura 13.8: Malla del modelo simplificado realizado para el regenerador
Ahora representamos tanto una vista frontal de la malla del modelo, como una vistaen planta, para tener una idea más intuitiva de los detalles de la geometría tanto delmodelo, como de la malla:

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 263
Figura 13.9: Vista frontal del modelo
Figura 13.10: Vista en planta del modelo
Para correr el modelo se deben imponer unas condiciones de contorno lo más pare-cidas a las que luego se dan en la aplicación que se pretende estudiar. En este caso, las
Generador Solar de Ciclo de Aire

26413.5. SIMULACIONES NUMÉRICAS REALIZADAS PARA ESTUDIAR EL
COMPORTAMIENTO DEL REGENERADOR
condiciones de contorno que se han establecido son:
En la región de la ENTRADA, se ha impuesto una presión manométrica de 1013250Pa = 10 atm, simulando el proceso que tiene lugar con la máxima carga térmicaque se produce en el ciclo del motor. También se ha impuesto una temperatura de850 K, para ser coherentes con la temperatura que se da en el extremo caliente delregenerador.
En la región de la SALIDA, se ha supuesto que la presión manométrica es nula,con lo que la presión interior coincide con la atmosférica, que significa que el motoropera sin precarga. En cuanto a temperaturas, en el extremo frío del regeneradorse supone que se encuentra a 400 K.
En cuanto al FLUIDO empleado se ha supuesto que es aire, que ya viene determi-nado en la base de datos del software, con lo que las propiedades físicas tales comola capacidad térmica específica a presión constante, la densidad, etc... ya vienentodas dadas.
El análisis se ha efectuado empleando como modelo de viscosidad el “Spalart-Almaras”de una ecuación, que funciona muy bien en regímenes fluidos en conductos.
Corriendo el modelo se llega a la convergencia de la solución con tan sólo 330 itera-ciones, lo que ratifica la eficiencia del modelo viscoso y de la relativa sencillez del modelo.
Los resultados obtenidos para las diferentes magnitudes fluidodinámicas, se represen-tan a continuación, tanto en forma de “Contour” (representa la forma geométrica de lamalla y mediante un código de colores informa sobre las magnitudes representadas enél), como en forma de vectores, que tienen información tanto en la dirección y magnituddel vector como en su color.
Representando la presión estática para el modelo completo se tiene:

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 265
Figura 13.11: Simulación numérica de la Presión estática para el Regenerador
En la que se aprecia de forma evidente la caida de presión que se produce longi-tudinalmente en el Regenerador a medida que el flujo va avanzando. Por otra parte sirepresentamos la presión dinámica, tenemos asimismo influencia de la velocidad que llevael fluido a lo largo de todo el Regenerador, obteniendo:
Generador Solar de Ciclo de Aire

26613.5. SIMULACIONES NUMÉRICAS REALIZADAS PARA ESTUDIAR EL
COMPORTAMIENTO DEL REGENERADOR
Figura 13.12: Presión dinámica en el Regenerador
En la que se puede ver cómo afecta la fricción con las paredes del flujo del gas detrabajo en el Regenerador, y las pérdidas que no se tienen en cuenta cuando realizamosmodelos ideales sin viscosidad. Mostrando una imagen más cercana de la distribución enuna parte de la sección, donde se recoge de forma más evidente el efecto en las paredes,se tiene:

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 267
Figura 13.13: Presión Dinámica en una sección del Regenerador
Para ver las pérdidas que se van teniendo a medida que el fluido atraviesa el Re-generador, presentamos a continuación la distribución de la presión total, en la que seve claramente que los valores más altos están en la sección de entrada, y a medida queel fluido atraviesa cada vez más longitud se va perdiendo Presión Total, con lo que laspérdidas aumentan.
Generador Solar de Ciclo de Aire

26813.5. SIMULACIONES NUMÉRICAS REALIZADAS PARA ESTUDIAR EL
COMPORTAMIENTO DEL REGENERADOR
Figura 13.14: Simulación de la Presión Total
Si ahora representamos en unos ejes cartesianos la pérdida de presión total en funciónde la longitud recorrida por el fluido a través del Regenerador, en dirección longitudinal,tenemos el siguiente gráfico:

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 269
Figura 13.15: Pérdida de presión total longitudinal
Ahora, si nos centramos en los aspectos de la turbulencia generada en el paso a travésdel Regenerador, que es otra forma en la que se traducen las pérdidas, al representar elNúmero de Reynolds de cada celda, tenemos:
Generador Solar de Ciclo de Aire

27013.5. SIMULACIONES NUMÉRICAS REALIZADAS PARA ESTUDIAR EL
COMPORTAMIENTO DEL REGENERADOR
Figura 13.16: Número de Reynolds de cada celda
Ahora queremos representar el Número de Reynolds basado en la velocidad de fricción;para ello, tenemos que definir antes la velocidad de fricción, y es precisamente la siguiente:
uτ =
√(du
dy
)
siendo u la velocidad longitudinal promedio del fluido y la dirección y la dirección normala la pared. Ahora podemos definir el Número de Reynolds basado en la velocidad defricción como:
Reτ =ρ·uτ ·Lµ
y si lo representamos para todo el modelo en una gráfica tridimensional, obtenemos:

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 271
Figura 13.17: Número de Reynolds basado en la velocidad de fricción
Para apreciar bien la dirección longitudinal, que es la que más nos interesa, represen-tamos el diagrama tridimensional orientado de forma más apropiada:
Figura 13.18: Número de Reynolds basado en la velocidad de fricción
Generador Solar de Ciclo de Aire

27213.6. SIMULACIÓN NUMÉRICA DE MAYOR ORDEN DE COMPLEJIDAD PARA
ESTUDIAR EL COMPORTAMIENTO DEL REGENERADOR
Y representándolo en ejes cartesianos, en función de la coordenada longitudinal, te-nemos:
Figura 13.19: Número de Reynolds basado en la velocidad de fricción longitudinalmente.
Con este modelo sencillo del Regenerador lo que se pretendía era tener una idea másintuitiva de la dinámica del fluido cuando pasa a su través, poder evaluar las pérdidasde una forma más clara y conociendo la causa que las generan, y mediante este análisissimplificado, se puede apreciar lo que en un principio podía no parecer al menos intuitivode forma directa.
13.6. SIMULACIÓN NUMÉRICA DE MAYOR ORDENDE COMPLEJIDAD PARA ESTUDIAR EL COM-PORTAMIENTO DEL REGENERADOR
Para tener una solución numérica más aproximada de lo que ocurre en el interior delregenerador, se ha realizado una simulación numérica de mayor complejidad. Despuésde ensayar con varias secciones, atendiendo tanto a su comportamiento como a su faci-lidad de construcción, entre otros parámetros, hemos llegado a la conclusión de que lasección óptima es la hexagonal, con lo que se ha realizado un modelo numérico con estascaracterísticas:
Sección Hexagonal regular de 10 mm de lado
Longitud de 100 mm.

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 273
A continuación se muestran varias imágenes de la malla del modelo hexagonal:
Figura 13.20: Vista tridimensional de la malla del modelo hexagonal
Figura 13.21: Sección de entrada del modelo hexagonal
Generador Solar de Ciclo de Aire

27413.6. SIMULACIÓN NUMÉRICA DE MAYOR ORDEN DE COMPLEJIDAD PARA
ESTUDIAR EL COMPORTAMIENTO DEL REGENERADOR
Al modelo, para analizarlo en las mismas condiciones que el modelo simplificado quehemos mostrado anteriormente, le hemos puesto las siguientes condiciones de contorno:
Temperatura de entrada = 850 K
Temperatura de salida = 400 K
Presión de entrada (manométrica) = 1013250 Pa = 10 atm
Presión de salida (manométrica) = 0 Pa = 0 atm
Por lo que, con estas condiciones, hemos corrido el modelo numérico, bajo el mismosoftware que se ha descrito anteriormente para poder hacer una comparación en lascondiciones más idóneas posibles.
Los resultados obtenidos en este nuevo modelo se muestran a continuación:En primer lugar, tenemos una distribución de presión estática como la que se muestra:
Figura 13.22: Distribución de presión estática en el modelo hexagonal
Podemos ver la caída de presión que se produce a medida que el fluido va avanzandopor el conducto, y cuya causa fundamental es la viscosidad. Si tenemos en cuenta dela misma forma la pérdida de velocidad, representando la presión dinámica, tenemos elsiguiente diagrama:

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 275
Figura 13.23: Distribución de la presión dinámica en el modelo hexagonal del regenerador
Pero, para apreciar de una forma más concreta lo que ocurre a nivel de detalle enla sección, es preferible mostrar una vista de la misma, ya que se puede ver de formaintuitiva el comportamiento cerca de las paredes y en el interior, que es completamentediferente, debido a que el fenómeno está localizado en las paredes, y a partir de ahí se vadifundiendo.
Generador Solar de Ciclo de Aire

27613.6. SIMULACIÓN NUMÉRICA DE MAYOR ORDEN DE COMPLEJIDAD PARA
ESTUDIAR EL COMPORTAMIENTO DEL REGENERADOR
Figura 13.24: Vista de una sección de la distribución de presión dinámica en el modelohexagonal del regenerador
Para ver las pérdidas que se van teniendo a medida que el fluido atraviesa el Re-generador, presentamos a continuación la distribución de la presión total, en la que seve claramente que los valores más altos están en la sección de entrada, y a medida queel fluido atraviesa cada vez más longitud se va perdiendo Presión Total, con lo que laspérdidas aumentan.
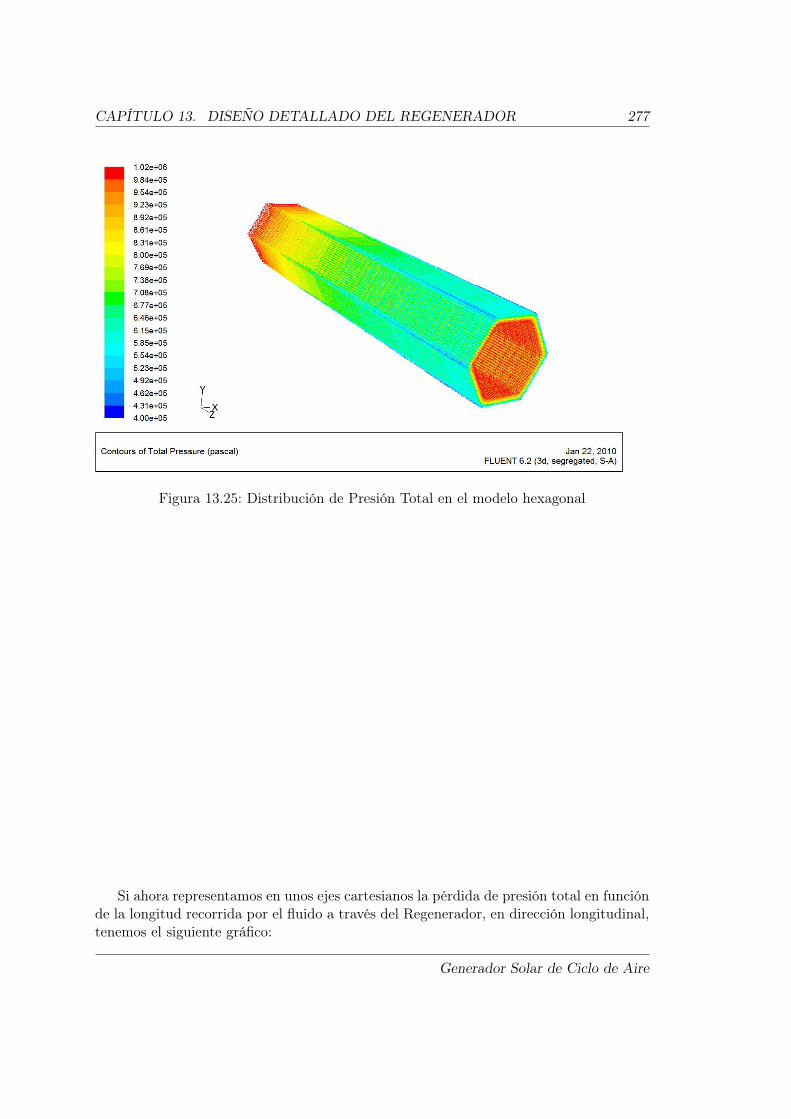
CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 277
Figura 13.25: Distribución de Presión Total en el modelo hexagonal
Si ahora representamos en unos ejes cartesianos la pérdida de presión total en funciónde la longitud recorrida por el fluido a través del Regenerador, en dirección longitudinal,tenemos el siguiente gráfico:
Generador Solar de Ciclo de Aire

27813.6. SIMULACIÓN NUMÉRICA DE MAYOR ORDEN DE COMPLEJIDAD PARA
ESTUDIAR EL COMPORTAMIENTO DEL REGENERADOR
Figura 13.26: Diagrama cartesiano de la pérdida de presión total longitudinal en el rege-nerador
que se puede comparar con el anterior y se ve que ambos tienen unos rasgos comunes,en el que se aprecia un comportamiento global común, que es la pérdida de presióntotal en un conducto a medida que se recorre el mismo, pero de la misma forma sepuede ver que tienen cada uno un comportamiento característico, principalmente debidoa que en el primer caso las tres dimensiones características son de distintos órdenesde magnitud, mientras que en el segundo caso, en el hexagonal, toda la sección tieneunas dimensiones del mismo orden de magnitud, siendo mucho menor que la longitudcaracterística longitudinal, por lo que la distribución de velocidades en la sección en elprimer caso es diferente según la dirección transversal larga o corta, mientras que lasvelocidades en la sección del modelo hexagonal son similares.
Otra forma de evaluar el nivel de turbulencia tanto en la sección como en todo elvolumen del modelo, es representar el número de Reynolds basado en la velocidad carac-terística de la sección, y utilizando como longitud característica la dimensión longitudinaldel modelo. Representando el número de Reynolds para cada célula del modelo, se tiene:

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 279
Figura 13.27: Número de Reynolds de cada célula del modelo hexagonal
Ahora, para comparar de una forma más concisa las pérdidas que se producen en am-bos regeneradores, representamos la velocidad de fricción, antes definida, para el modelodel regenerador hexagonal:
Generador Solar de Ciclo de Aire
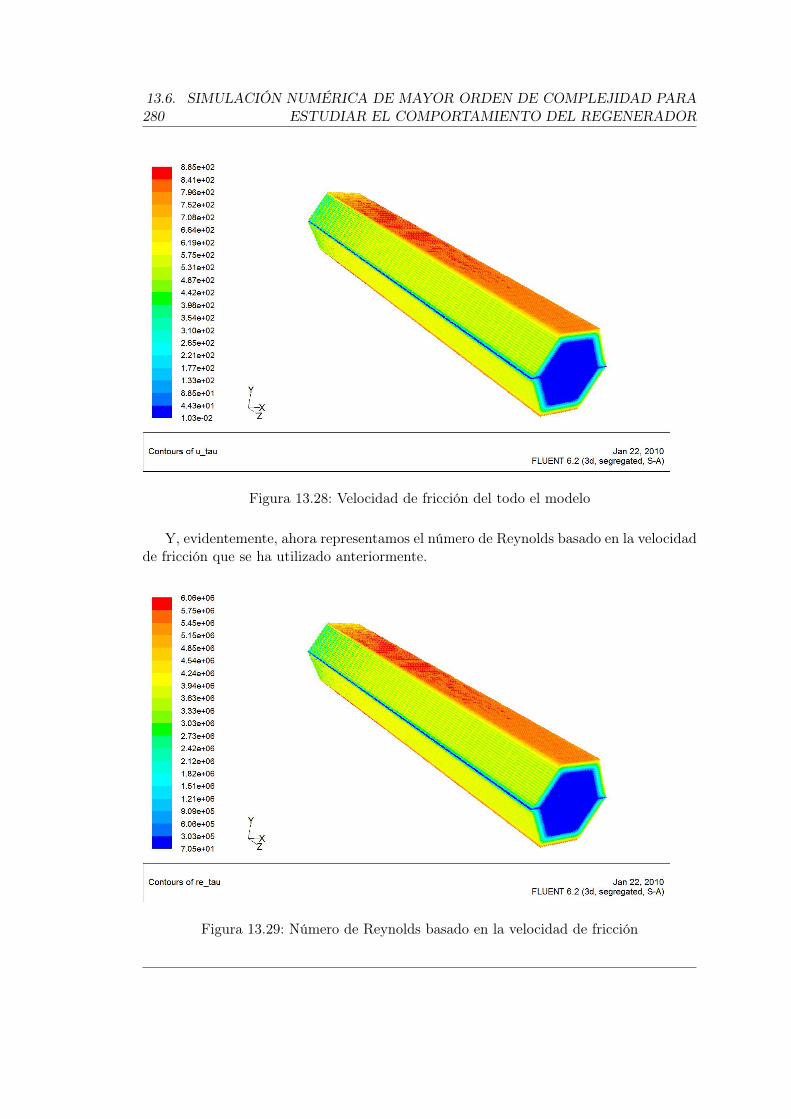
28013.6. SIMULACIÓN NUMÉRICA DE MAYOR ORDEN DE COMPLEJIDAD PARA
ESTUDIAR EL COMPORTAMIENTO DEL REGENERADOR
Figura 13.28: Velocidad de fricción del todo el modelo
Y, evidentemente, ahora representamos el número de Reynolds basado en la velocidadde fricción que se ha utilizado anteriormente.
Figura 13.29: Número de Reynolds basado en la velocidad de fricción

CAPÍTULO 13. DISEÑO DETALLADO DEL REGENERADOR 281
Viendo de forma gráfica, en un diagrama cartesiano en el que se representa el númerode Reynolds basado en la velocidad de fricción en función de la coordenada longitudinaldel modelo, tenemos una idea de las pérdidas que se producen en función de la distanciarecorrida por el interior del regenerador.
Figura 13.30: Diagrama cartesiano del número de Reynolds en función de la coordenadalongitudinal del modelo.
Visto y analizado este último modelo del regenerador, comparándolo con el estudiadoanteriormente, se puede apreciar que en el modelo paralelepipédico, al tener una dimen-sión muy pequeña, las pérdidas producidas por esos gradientes de velocidad tan grandes,hacían que el flujo no fuese uniforme en ninguna parte de la sección, por lo que, apartede ser más complejo su estudio, no se tiene una buena eficiencia. Esto inicialmente se rea-lizaba para procurar tener un incremento de volumen respecto a los volúmenes muertosde los cilindros lo más pequeño posible, para tener el mejor rendimiento térmico del cicloposible, pero vemos que lo que intentamos mejorar en el rendimiento térmico del ciclo loperdemos en degradación de energía por viscosidad, al tener unos gradientes de velocidadexcesivamente grandes. Sin embargo, con el modelo hexagonal, al tener las dimensionescaracterísticas de la sección del mismo orden todas, estos gradientes de velocidad, y portanto las pérdidas asociadas a éstos, no se producen, por lo que el rendimiento térmicoes notablemente mayor, y como estas secciones hexagonales se pueden hacer tambiénrelativamente pequeñas, no penalizamos excesivamente el volumen adicional de los vo-lúmenes muertos de los respectivos cilindros. Una consideración adicional es la facilidadde fabricación de estos perfiles hexagonales a partir de chapas onduladas que se reali-zan como parte fundamental en materiales compuestos y de “honeycomb”, proceso muy
Generador Solar de Ciclo de Aire

28213.6. SIMULACIÓN NUMÉRICA DE MAYOR ORDEN DE COMPLEJIDAD PARA
ESTUDIAR EL COMPORTAMIENTO DEL REGENERADOR
estudiado, a la vez que es una forma geométrica que es capaz de llenar una sección porreplicación, consideraciones todas estas últimas de carácter práctico, pero no por ellomenos importantes.
Figura 13.31: Ejemplo de una aplicación de Honeycomb
Debido a una mejora sustancial en el Regenerador, que es una de las partes fundamen-tales del motor, se produce un decremento significativo de las pérdidas en el mismo, porlo que se tiene un motor mucho más competitivo desde el punto de vista de la eficiencia,que es el objetivo fundamental de este estudio.

Capítulo 14
Estudio de rotura y estimación de lavida
Un aspecto muy importante en cualquier diseño mecánico es el estudio del fenómenode fatiga. La fatiga de materiales es un fenómeno por el cual la rotura de los materialessometidos a cargas cíclicas se produce ante cargas inferiores a las cargas estáticas queproducirían la rotura. Un ejemplo de ello se tiene en un alambre: flexionándolo repeti-damente se rompe con facilidad, pero la fuerza que hay que hacer para romperlo en unasóla flexión es muy grande. La fatiga es una forma de rotura que ocurre en estructurassometidas a tensiones dinámicas y fluctuantes (puentes, automóviles, aviones, etc.). Suprincipal peligro es que puede ocurrir a una tensión menor que la resistencia a traccióno el límite elástico para una carga estática, y aparecer sin previo aviso, causando roturascatastróficas. Es un fenómeno muy importante, ya que es la primera causa de rotura delos materiales metálicos (aproximadamente el 90%), aunque también está presente enpolímeros (plásticos, composites,...), y en cerámicos.En el caso de un mecanismo se pueden distinguir claramente dos tipos diferenciados defenomenos de fatiga que deberán analizarse por separado. Por un lado estaría la fatigade los componentes estructurales como puedan ser el eje del cigüeñal, las coronas delsoporte, etc. Por otro, la fatiga en rodamientos y cojinetes de fricción.En el primer caso podemos basarnos en la curva S-N del material. En dicha curva se repre-senta el numero de ciclos (o la vida) que puede soportar el material para una determinadatensión interna. Así pues se puede determinar la vida de la pieza sin más que calcular latensión a la que está sometida y usando la curva S-N del material correspondiente. Loideal es que dichas tensiones se encuentren por debajo del límite de fatiga, en cuyo casopuede suponerse que la vida de la pieza es infinita. Esto puede hacerse incrementandolas dimensiones de los componentes estructurales (incrementando el diametro del eje porejemplo) de modo que se reduzca el nivel de tensiones. En la figura se ha representadola curva S-N de un aluminio.En cualquier caso, y aunque siempre es importante verificar que todos los elementosestructurales estan libres de rotura por fatiga durante la vida prevista del mecanismo; lafatiga de los rodamientos es siempre mucho más importante y condiciona tanto la vida
283

284
Figura 14.1: Curva SN de un aluminio.
estimada del mecanismo como su mantenimiento. En el caso de nuestro motor existenrodamientos entre el soporte y el cigüeñal, entre el cigüeñal y los discos, y entre los discosy los émbolos que habrá que estudiar.Según la norma ISO 281:1990 la vida de un rodamiento en horas viene dada por:
L10h =106
60n
(C
P
)p(14.1)
En la que:
L10h ≡ vida nominal (con un 90% de fiabilidad), en horas de funcionamiento.
C ≡ capacidad de carga dinámica [kN].
P ≡ carga dinámica equivalente del rodamiento [kN].
n ≡ velocidad de giro, [rpm].
p ≡ exponente de la ecuación de la vida (3 para los rodamientos de bolas, 10/3para los rodamientos de rodillos).
La capacidad de carga del rodamiento viene dada por el fabricante del mismo, mientrasque la velocidad de giro y la carga dinámica han de ser determinadas por el diseñador.Para el cálculo de la carga dinámica equivalente usaremos las figuras 11.58 y 11.59 de lasección 11.4.9. En dichas figuras se ve como los módulos de las fuerzas varían a lo largo deun ciclo, lo que nos obligaría a modificar la fórmula (14.1) adecuadamente para reflejardicha circunstancia. Sin embargo, se va a realizar un cálculo simplificado tomando comofuerza la máxima ejercida a lo largo del ciclo. Dicho cálculo es conservativo ya que la

CAPÍTULO 14. ESTUDIO DE ROTURA Y ESTIMACIÓN DE LA VIDA 285
vida obtenida será siempre inferior a la vida real del mecanismo, pero simplificará muchoel proceso de cálculo y proporcionará una buena estimación del orden de magnitud de lavida y de las dimensiones de rodamiento requeridas. En la figura 11.58 puede verse queel módulo máximo de la fuerza que ha de soportar el rodamiento tanto en el soporte delcigüeñal como en la unión cigüeñal-disco es de alrededor de 22 kN. Para la unión entrelos émbolos y los discos dicho valor es de alrededor de 15 kN. Estos seran los valoresusados en los cálculos.Además de la fórmula (14.1) tendremos en cuenta que la norma ISO 281:1990/Amd2:2000 permite a los fabricantes modificarla de modo que refleje mejor las condicionesde funcionamiento reales del rodamiento y las características especiales de ese diseño enparticular. Obtendremos así dos vidas la vida nominal obtenida a partir de la fórmula14.1 , y la vida estimada por el fabricante. Para ello hemos seleccionado un fabricantede referencia, a partir de cuyos datos efectuaremos los cálculos. Se ha optado por uno delos mayores fabricantes mundiales: SKF®.Otro factor a tener en cuenta es que dependiendo de la ubicación se habrá de seleccionarun tipo de rodamiento u otro. En el caso de nuestro motor existen tres ubicaciones conrequerimientos distintos. Por un lado los rodamientos entre el soporte y el cigüeñal ylos situados entre los émbolos y los discos han de soportar elevadas cargas radiales, sinpenalizar excesivamente el rozamiento. Es por ello que se han seleccionado rodamientosde rodillos cilíndricos que cumplen ambos requrimientos. En la figura 14.2 puede verse unejemplo de este tipo de rodamientos. En cuanto a los rodamientos correspondientes a la
Figura 14.2: Rodamientos de rodillos cilindrícos.
unión entre los discos y el cigüeñal se han seleccionado rodamientos de rodillos cónicos.Esto se debe fundamentalmente a que además de los requerimientos exigidos anterior-mente, se necesita que los rodamientos sean capaces de soportar grandes momentos. Porlo tanto para esta aplicación el tipo de rodamiento idóneo es el rodamiento de rodilloscónicos. En la figura 14.3 pueden verse este tipo de rodamientos. Una última considera-ción es que el tamaño de los rodamientos ha de ser compatible con las dimensiones de la
Generador Solar de Ciclo de Aire

28614.1. SELECCIÓN DE RODAMIENTOS PARA LA UNIÓN SOPORTE-CIGÜEÑAL
Figura 14.3: Rodamientos de rodillos cónicos.
máquina. Este será un condicionante importante a la hora de la selección de los mismos,y en última instancia condicionará alguno de los parámetros geométricos.
14.1. Selección de rodamientos para la unión soporte-cigüeñal
Las condiciones de cálculo del rodamiento son las siguientes:
P =20 kN (carga dinámica equivalente del rodamiento).
n =3.000 r.p.m. (velocidad de giro).
p = 103 (exponente de la ecuación de vida).
Ya se ha comentado anteriormente que se seleccionarían rodamientos de rodillos cilín-dricos del fabricante SKF. Dicho fabricante ofrece una gran cantidad de modelos derodamientos de este tipo. Se tomarán aquellos que en base a las condiciones de cálculo yteniendo en cuenta las dimensiones del motor, proporcionen una mayor vida. Tras variasiteraciones se llega a la siguiente selección.
Modelo C [kN] L10h (vida ISO) [h] L10hm (vida fabricante) [h]2308 129 2770 52200
Puede verse como existe una gran diferencia entre la vida prevista por el fabricante y lavida según norma ISO. Esto se debe a que la fórmula ISO es una fórmula genérica paratodo tipo de rodamientos que no comtempla sus particularidades. El dato del fabricantesiempre es más fiable y exacto, por lo que podemos considerar que ese es el valor real.Se tiene pues una vida de alrededor de 50.000 horas, un valor muy bueno. Más aún sitenemos en cuenta que el cálculo ha sido altamente conservativo, por lo que un cálculomás refinado proporcionaría una vida mayor, o una modificación del diseño en la que seredujesen las dimensiones del rodamiento. Hay que tener en cuenta que este valor obligaráa programar una operación de mantenimiento para substituir los rodamientos a las 50.000horas. Además de esta operación de substitución sería adecuado programar operaciones de

CAPÍTULO 14. ESTUDIO DE ROTURA Y ESTIMACIÓN DE LA VIDA 287
supervisión de los mismos aproximadamente cada 15.000 horas, y substituir el rodamientoen la tercera revisión (45.000 horas) si fuese necesario. De este modo el rodamientoestaría sujeto a tres operaciones de inspección antes de la operación de substitución loque garantizaría su buen funcionamiento durante toda su vida útil.Por último cabe decir que la selección del rodamiento condiciona el diámetro del eje del
Cylindrical roller bearings, single row
Principal dimensions Basic load ratings Fatigue Speed ratings Mass Designation Angle ringdynamic static load Reference Limiting Designation
limit speed speed
d D B C C0 Pu * - SKF Explorer bearing
mm kN kN r/min kg - -
40 90 33 129 120 15,3 8000 9500 0,96 NJ 2308 ECJ * -
Figura 14.4: Información del fabricante sobre el rodamiento seleccionado para la uniónsoporte-cigüeñal.
cigüeñal. En la figura 14.4 puede verse información del fabricante acerca del modelo 2308.Puede verse como el diámetro interior del mismo es de 40 mm. Este valor ha de coincidircon el valor del diametro del cigüeñal, por lo que ya podemos determinar uno de losparámetros geométricos a los que no se había asignado un valor, d6 al que asignaremoseste valor (d6 = 40mm).
14.2. Selección de rodamientos para la unión cigüeñal-discos
Las condiciones de cálculo son iguales a las anteriores:
P =20 kN (carga dinámica equivalente del rodamiento).
n =3000 r.p.m. (velocidad de giro).
p = 103 (exponente de la ecuación de vida).
Ya se comentó que se seleccionarían rodamientos de rodillos cónicos del fabricante SKF.Como en el caso anterior el fabricante dispone de una gran cantidad de modelos derodamientos de este tipo. Las consideraciones para la selección serán las mismas queanteriormente. Se tomarán aquellos que en base a las condiciones de cálculo y teniendoen cuenta las dimensiones del motor, proporcionen una mayor vida. Tras varias iteracionesse llega a la siguiente selección.
Generador Solar de Ciclo de Aire

288 14.3. SELECCIÓN DE RODAMIENTOS PARA LA UNIÓN ÉMBOLOS-DISCOS
Figura 14.5: Imagen tridimensional del rodamiento seleccionado para la unión soporte-cigüeñal.
Modelo C [kN] L10h (vida ISO) [h] L10hm (vida fabricante) [h]31308 J2/QCL7CDF 146 4190 153000
En este caso, la diferencia entre la vida proporcionada por el fabricante y la vida ISO estodavía mayor que antes. Ya se dijo que el valor del fabricante es siempre más preciso.Especialmente en aquellos rodamientos con características constructivas especiales comoes el caso. Puede considerarse por tanto que la vida de estos rodamientos es de 150.000horas aproximadamente. El precio que se paga por una vida tan elevada y la capacidadadicional de soportar momentos en este tipo de rodamientos se compensa con un peorrendimiento que en el caso de rodamientos con cilíndros cilíndricos.Podrían programarse operaciones de supervisión cada 15.000 horas conjuntamente con lasupervisión de los rodamientos del soporte-cigüeñal y una operación de substitución enla décima revisión (150.000 horas) garantizando el buen funcionamiento de la máquina yobtimizando las operaciones de mantenimiento.En cualquier caso este valor de vida es muy elevado, y en un cálculo detallado podríarefinarse a fin de disminuir las dimensiones. Al igual que antes la selección del rodamientonos condiciona las dimensiones de los parámetros geométricos. En este caso en base a lainformación del catálogo (14.6) puede concluirse que: d4 = 40 mm y l4 = 52 mm.
14.3. Selección de rodamientos para la unión émbolos-discos
En este caso las condiciones de cálculo son las siguientes:
P =15 kN (carga dinámica equivalente del rodamiento).
n =3000 r.p.m. (velocidad de giro).
p = 103 (exponente de la ecuación de vida).

CAPÍTULO 14. ESTUDIO DE ROTURA Y ESTIMACIÓN DE LA VIDA 289Tapered roller bearings, single row, paired face-to-face
Principal dimensions Basic load ratings Fatigue Speed ratings Mass Designationdynamic static load Reference Limiting
limit speed speed
d D T C C0 Pu * - SKF Explorer bearing
mm kN kN r/min kg -
40 90 50,5 146 163 19 4500 7500 1,50 31308 J2/QCL7CDF *
Figura 14.6: Información del fabricante sobre el rodamiento seleccionado para la unióndiscos-cigüeñal.
Figura 14.7: Imagen tridimensional del rodamiento seleccionado para la unión discos-cigüeñal.
Se volverán a utilizar rodamientos de rodillos cónicos del fabricante SKF y las conside-raciones para la selección serán las mismas que en los dos casos anteriores.
Modelo C [kN] L10h (vida ISO) [h] L10hm (vida fabricante) [h]NJ 2307 ECP 106 3760 91700
Ahora se obtiene una vida de alrededor de 90.000 horas, que como los anteriores es unvalor bastante elevado. Con la operación de mantenimiento programada anteriormente alas 15.000 horas podríamos verificar este rodamiento también, y proceder a su substitu-ción en la octava revisión (90.000 horas). Como siempre un cálculo más exacto conllevaríauna modificación de este valor y del modelo seleccionado, optimizando sus dimensiones
Generador Solar de Ciclo de Aire

290 14.3. SELECCIÓN DE RODAMIENTOS PARA LA UNIÓN ÉMBOLOS-DISCOS
Cylindrical roller bearings, single row
Principal dimensions Basic load ratings Fatigue Speed ratings Mass Designation Angle ringdynamic static load Reference Limiting Designation
limit speed speed
d D B C C0 Pu * - SKF Explorer bearing
mm kN kN r/min kg - -
35 80 31 106 98 12,7 9500 11000 0,73 NJ 2307 ECP * -
Figura 14.8: Información del fabricante sobre el rodamiento seleccionado para la uniónémbolos-discos.
Figura 14.9: Imagen tridimensional del rodamiento seleccionado para la unión émbolos-discos.

Capítulo 15
Análisis paramétrico del diseño final
Procesos e idealizaciones, modelizaciones: En un principio, para abordar de formasucesiva las distintas etapas de diseño, se decidió estudiar los procesos de car-ga/descarga combinado con las transformaciones termodinámicas de compresión yexpansión. Posteriormente se estudió el movimiento de los émbolos para relacio-nar los distintos procesos que ocurren en los cilindros con los tiempos en los queocurren. Más tarde, se estudió la interacción de los procesos que ocurren simultá-neamente en los dos cilindros que tienen los émbolos desfasados un cierto ángulodel cigüeñal para que sea posible seguir el ciclo Stirling, aunque no sea el ciclo ideal.Después se evaluaron conjuntamente los procesos que ocurren en los dos cilindrosteniendo en cuenta la interacción entre ambos y finalmente se añadió el efecto delretraso que se produce entre el proceso en el cilindro que se descarga y el que secarga debido a que el fluido tiene que atravesar el regenerador y sus dimensiones ytiempos característicos tienen un efecto importante en el funcionamiento del motor.
Sucesivas aproximaciones y refinamiento. A medida que se iban llevando a cabosucesivas tareas de la secuencia anteriormente descrita, se detectaban efectos queno se habían considerado y que eran fundamentales en alguna magnitud o carac-terística que se consideraba importante y se quería recoger su influencia, por ello,se ha ido haciendo una iteración entre los distintos procesos en la etapa de diseñohasta recoger todos los efectos que se consideran fundamentales en la operación delmotor a este nivel de diseño preliminar. Por ello están bien detalladas las distintasfases que se han seguido para facilitar esta tarea de sucesivas aproximaciones yrefinamiento del modelo.
Ecuaciones y desarrollo matemático: A continuación se presenta un resumen delos desarrollos matemáticos que se han necesitado efectuar para la elaboración delos modelos a partir de las ecuaciones de la mecanica de fluidos, termodinámica ymecánica de medios contínuos. Estas relaciones que se presentan a continuación secorresponden con una aproximación suficiente para la etapa de diseño preliminar enla que nos encontramos, no pretenden abordar el problema de una forma analítica yresolver todas las ecuaciones de la mecánica de fluidos aplicadas a nuestro sistema,
291

29215.1. ANÁLISIS PRELIMINAR DE LOS PROCESOS TERMODINÁMICOS DEL
SISTEMA SUPONIENDO UN CICLO SCHMIDT.
ya que no resulta práctico.
Integracion en Matlab: Se ha elegido este Software para el tratamiento matemáticode las ecuaciones, las representaciones gráficas y la realización de los “Scripts” que seadjuntan en el anexo debido a su versatilidad, su estandarización y su fácil manejo.
Representacion grafica: A continuación se detallan los resultados gráficos que se hanobtenido para las distintas transformaciones en los cilindros en distintos instantesen el ciclo que se sigue.
15.1. ANÁLISIS PRELIMINARDE LOS PROCESOS TER-MODINÁMICOS DEL SISTEMA SUPONIENDOUNCICLO SCHMIDT.
CICLO SCHMIDT:
• El ciclo Schmidt tiene en cuenta el analysis isotermo de los motores Stirling;pero va un paso más allá considerando que el volumen del interior de loscilindros varía de forma senoidal.
• Para el análisis que se hace se consideran las siguientes hipótesis:◦ Se utiliza un gas ideal como fluido de trabajo y la relación entre sus
magnitudes termodinámicas es:
PV = mRT
◦ La presión (P ); es la misma en todo el interior del motor y varía única-mente con el tiempo.
◦ Las condiciones de transferencia de calor son suficientes para mantenertodo el gas dentro de los espacios donde se produce la compresión (Vc)y el enfriamiento (Vk) a temperatura constante en todo el ciclo (Tc). Portanto las masas de gas dentro de dichos espacios está dada por:
mc =PVcRTc
mk =PVkRTc
◦ Las condiciones de transferencia de calor son suficientes para mantenertodo el gas dentro de los espacios donde se produce la expansión (Ve) yel calentamiento (Vh) a temperatura constante en todo el ciclo (Th). Portanto las masas de gas dentro de dichos espacios está dada por:
me =PVeRTh
mh =PVhRTh

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 293
◦ Las condiciones de transferencia de calor son suficientes para mantener ladistribución de temperatura dentro del regenerador (Vr) lineal, variandodesde (Tc) donde el regenerador está conectado al lado frío del motor,hasta (Th) en el lado caliente del motor. Por tanto, la masa dentro delregenerador está dada por:
mr =PVr ln
(ThTc
)R (Th − Tc)
◦ El volumen donde se produce la compresión varía sinusoidalmente de laforma:
Vc = Vclc +12Vswc (1 + cos (Θ))
donde Θes el ángulo de cigüeñal girado, proporcional al tiempo; Vclces elvolumen muerto, mínimo volumen de Vc y Vswces el volumen absorbidopor el émbolo en su movimiento; por lo que Vcmax = Vclc + Vswc
◦ El volumen en el espacio donde se produce la expansión varía de formasenoidal de la forma:
Ve = Vcle +12Vswe (1 + cos (Θ + δ))
donde Θes el ángulo de cigüeñal girado, proporcional al tiempo; Vclees elvolumen muerto, mínimo volumen de Ve y Vswees el volumen absorbidopor el émbolo en su movimiento; por lo que Vemax = Vcle + Vswe; δ es elretraso en la fase. Si el retraso es positivo, Vc varía de la misma forma queVe pero retrasado en el tiempo.
◦ La masa total de gas dentro del motor, (mtot) no varía con el tiempo.
mtot = mc +mk +mh +me
• Presión como función de ángulo girado por el cigüeñal:
◦ Una ecuación para la presión en función del ángulo girado por el cigüe-ñal se obtiene sustituyendo las ecuaciones de las masas en los espaciosdonde se producen todas las transformaciones y los volumenes asocia-dos a los mismos en la ecuación de conservación de la masa total en elmotor; y resolviendo en la presión. Para simplificar la ecuación que re-sulta, utilizaremos un volumen de referencia, Vref y definimos 3 variablesadimensionales e, c y d:
e =12VsweVref
c =12VswcVref
ThTc
d =(Vh + Vcle) + Th
Tc(Vk + Vclc) + Vr
ThTh−Tc ln
(ThTc
)Vref
Generador Solar de Ciclo de Aire

29415.1. ANÁLISIS PRELIMINAR DE LOS PROCESOS TERMODINÁMICOS DEL
SISTEMA SUPONIENDO UN CICLO SCHMIDT.
y con todo esto, la presión resulta:
p =mtotRThVref
1(e+ c+ d) + c· cos (Θ) + e· cos (Θ + δ)
Esta ecuación nos permite determinar la presión (p) para cualquier ángulo(Θ) para unos volúmenes y unas temperaturas dadas. Para determinar lapresión media y el trabajo obtenido, para lo que es necesario realizaruna integración, es favorable poner esta ecuación en una forma diferenteutilizando ifentidades trigonométricas y geométricas:
cos (Θ + δ) = cos (Θ) cos (δ)− sin (Θ) sin (δ)
p =mtotRThVref
1B + C cos (Θ + β)
donde B = e+ c+d ; C =√e2 + 2ec cos (δ) + c2 y βse puede obtener de:
sin (β) = e sin(δ)C y cos (β) = c+e cos(δ)
C
• Presión máxima y mínima:
◦ De acuerdo a la ecuación: p = mtotRThVref
1B+C cos(Θ+β) la presión mínima
se alcanza cuando cos (Θ + β) = 1; y la presión máxima se da cuandocos (Θ + β) = −1:
pmin =mtotRThVref
1B + C
Pmax =mtotRThVref
1B − C
se puede ver que B > C; teniendo en cuenta que (Pmin > 0).
• Presión media:
◦ La media, sobre el ciclo dado por el ángulo Θ, de la presión puede sercalculado mediante:
Pave =1
2π
∫ 2π
0pdΘ =
1π
∫ 2π
0
dΘ(B + C cos (Θ + β))
la solución a la integral da lugar a:
Pave =mtotRThVref
1√(B2 − C2)
Es interesante hacer notar que la presión media coincide con la mediageométrica entre la presión máxima y la mínima del ciclo.
• Trabajo realizado por el espacio donde se realiza la expansión:

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 295
◦ Por definición:We =
∫pdVe
en la que la integración se debe llevar a cabo sobre el ciclo completo.Derivando la ecuación Ve = Vcle + 1
2Vswe (1 + cos (Θ + δ))con respecto aΘse tiene:
dVe = −12Vswe sin (Θ + δ) dΘ
y usando la expresión para la presión:
p =mtotRThVref
1B + C cos (Θ + β)
tenemos:
We = mtotRThe
∫ 2π
0
sin (Θ + δ)B + C cos (Θ + β)
dΘ
la solución de la integral nos proporciona el resultado:
We =mtotRThe2π
C
[B√
B2 − C2− 1]
sin (β − δ)
usando la definición de β mediante relaciones trigonométricas, finalmentetenemos:
We = mtotRTh
(2πecC2
)(B√
B2 − C2− 1)
sin (δ)
• Trabajo realizado por el espacio donde se hace la compresión:◦ Por definición:
Wc =∫pdVc
en la que la integración se debe llevar a cabo sobre el ciclo completo.Derivando la ecuación Vc = Vclc + 1
2Vswc (1 + cos (Θ))con respecto a Θsetiene:
dVc = −12Vswc sin (Θ) dΘ
y usando la expresión para la presión:
p =mtotRThVref
1B + C cos (Θ + β)
tenemos:
We = mtotRTh
(12VswcVref
)∫ 2π
0
sin (Θ)B + C cos (Θ + β)
dΘ
la solución de la integral nos proporciona el resultado:
We = mtotRTc2πecC2
[B√
B2 − C2− 1]
sin (δ)
el signo menos indica que el trabajo debe ser hecho en este espacio parallevar a cabo el movimiento necesario del pistón.
Generador Solar de Ciclo de Aire

29615.1. ANÁLISIS PRELIMINAR DE LOS PROCESOS TERMODINÁMICOS DEL
SISTEMA SUPONIENDO UN CICLO SCHMIDT.
• Trabajo neto realizado por el motor:
◦Wnet = We +Wc
con los resultados anteriores tenemos:
Wnet = mtotR (Th − Tc)(
2πecC2
)(B√
B2 − C2− 1)
sin (δ)
Una nota importante que concierne a las expresiones para los trabajos esque, en cuanto al término mtotR en la que R es la constante específica delgas. Este término nos proporciona la impresión, que es correcta, de queel trabajo que se obtiene en los motores Stirling se incrementa a medidaque lo hace la masa del gas en el interior del mismo. Pero también dala impresión de que cambiando el gas por otro con mayor valor de laconstante es ventajoso, pero desafortunadamente esto no es cierto. Sedemuestra fácilmente viendo que mtotR es igual que
(pVT
); lo que no
depende del gas considerado.
• Rendimiento Termodinámico:
◦ Generalmente en ingeniería se define como la relación entre el beneficio(Wnet) y los costes (Qh +Qe =calor suministrado por ciclo).
η =Wnet
(Qh +Qe)
para obtener los calores Qh y Qe tenemos en cuenta la ley de conservaciónde la energía para cada uno de los subespacios involucrados y obtenemos:
Qc = Wc
Qk = Wk = 0
Qr = Wr = 0
Qr = Wr = 0
Qe = We
Es la hipótesis de comportamiento isotermo en todos los subespacios laque simplifica la ley de conservación de la masa tan drásticamente por-que las masas de gas fluyendo de un subespacio al otro y viceversa tienendurante todo el tiempo una temperatura idéntica a la del propio subes-pacio y por tanto, la energía neta transportada por estos flujos de masason nulos para cada subespacio. Además, los trabajos en el enfriamiento,regenerador y el calentamiento son nulos porque los volúmenes en estosespacios no cambian con el tiempo. (dV = 0 en
∫pdV ); con lo que:
η =Wnet
We= 1− Tc
Th

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 297
usando las expresiones correspondientes a los trabajos Wnet y We res-pectivamente. Esta expresión es familiar porque es el límite de Carnot alrendimiento termodinámico de una máquina térmica).
• Optimización:
◦ Para el proceso de optimización tenemos disponibles para modificar los si-guientes parámetros: Temperaturas (Tc y Th); los volúmenes de los subes-pacios individualmente, la masa total(mtot), el tipo de gas (R) y el ángulode retraso en los volúmenes (δ):� No es necesario discutir que las temperaturas (Tc y Th) más allá que
tener en cuenta que su cociente afecta directamente al rendimientode una forma tan obvia y su diferencia al trabajo neto por ciclo deuna forma igualmente obvia. Por tanto, en lo siguiente hacemos lahipótesis de que las temperaturas (Tc y Th) son dadas.� Debido a las temperaturas dadas (Tc y Th), el rendimiento es idéntico
para todos los motores de ciclo Schmidt en los que optimizar Wnet.Para compararlos no es aconsejable utilizar la expresión
Wnet = mtotR (Th − Tc)(
2πecC2
)(B√
B2 − C2− 1)
sin (δ)
porque contiene a mtot como un factor que cambiará si cambiamosel volumen de uno o varios subespacios o el ángulo de desfase entrelos cilindros, a no ser que queramos comparar motores que operan adiferentes presiones.� En lugar de mantener mtot constante, comparamos motores que tie-
nen la misma presión media (pave) (para encontrar la configuraciónóptima): para ello, resolvemos la ecuación
pave =mtotRThVref
1√B2 − C2
para mtot y lo sustituímos en la ecuación:
Wnet = mtotR (Th − Tc)(
2πecC2
)(B√
B2 − C2− 1)
sin (δ)
y tenemos:
Wnet =(
1− TcTh
)paveVref
2πecC2
(B −
√B2 − C2
)sin (δ)
� En esta ecuación consideramos pave, Vref y las temperaturas Th y Tccomo constantes fijas y estudiamos su influencia en algunos de lossubespacios:
Generador Solar de Ciclo de Aire

29815.1. ANÁLISIS PRELIMINAR DE LOS PROCESOS TERMODINÁMICOS DEL
SISTEMA SUPONIENDO UN CICLO SCHMIDT.
� - Generalmente se acepta entre la gente que estudia los motores Stir-ling que los volúmenes de estos subespacios se deben mantener enun valor mínimo de modo que lo permitan la transferencia de calory los procesos de producción. Es interesante que el análisis del cicloSchmidt indica que esa es la dirección correcta.� - La única influencia que los volúmenes Vclc, Vk, Vr, Vh y Vcle tienen
en la ecuación del trabajo neto anterior es a través del término B, queaumenta a medida que cualquiera de estos volúmenes aumenta. Peroun incremento en B provoca una disminución en Wnetde acuerdo conesta ecuación, tomando la derivada de Wnet con respecto a B y seránegativa.
� - De las ecuaciones d =(Vh+Vcle)+
ThTc
(Vk+Vclc)+VrTh
Th−Tcln“ThTc
”Vref
y p =mtotRThVref
1B+C cos(Θ+β) se tiene también que B aumenta de forma mucho
más drástica a través de un aumento en (Vclc + Vk) que mediante unincremento en (Vh + Vcle), dado por un factor de
(ThTc
). El efecto del
volumen en el regenerador (Vr) se mejora de forma similar por el factor(Th
Th−Tc
)ln(ThTc
), el valor del cual se encuentra entre 1 y
(ThTc
)� Valor óptimo del ángulo de retraso en el movimiento de los émbolos:
El óptimo en el valor del ángulo de desfase (δ)se consigue por ejemplomanteniendo todos los parámetros de la ecuación del trabajo neto:
Wnet =(
1− TcTh
)paveVref
2πecC2
(B −
√B2 − C2
)sin (δ)
constantes y variando el ángulo de desfase de variación del volumenen los cilindros (δ) de forma sistemática hasta que se consiga el tra-bajo neto máximo (Wnet). (δ)influye en la expresión del trabajo netode forma más significativa a través del término sin (δ); pero tambiéna través de C2. Matemáticamente hablando, tenemos que tomar laderivada del trabajo neto con respecto a δ e igualarlo a cero. Despuésde simples desarrollos matemáticos, llegamos a:
cos (δopt) =√
1 + µ2 − µ
con el coeficiente µ calculado como: µ = (B+√B2−C2)2ec
√B2 − C2 ;
de donde C =√e2 + 2ec cos (δ) + c2. La ecuación en µ no se puede
resolver analíticamente porque es trascendente y no se puede despejarµ, pero tratando numéricamente la expresión, con pocas iteracionesse llega a la convergencia. El valor óptimo que se obtiene está siempremuy cerca de δ = 90º, lo que indica que el comportamiento de Wnet
está dominado por el término en seno. Esto en cambio, nos muestraque el ángulo de desfase no es un parámetro extremadamente crítico.

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 299
� Propiedades matemáticas de la relación para el trabajo neto:� - Esta ecuación muestra una notable propiedad de simetría relaciona-
da con las variables e y c; los valores de c y e se pueden intercambiarentre sí sin apenas afectar al valor de Wnet.� - No hemos podido demostrar que Wnet es una función estrictamen-
te creciente del espacio adimensional de expansión (e) y del espacioadimensional de compresión (c). En su lugar, hemos verificado numé-ricamente que la derivada de Wnet con respecto a e ( y por tanto ac) es siempre positiva para muchas combinaciones de e, c y el ángulode desfase δ. Además, podemos probar matemáticamente que la de-rivada de Wnet con respecto a e es positiva cuando e → 0 y tiende a(+0) cuando e → ∞ , apoyando el razonamiento de que la ecuaciónde Wnet es una función estrictamente creciente.� - En la práctica esto significa que un incremento en el volumen de
expansión, compresión o en ambos resultará en un trabajo adicionalgenerado por el motor Stirling de acuerdo al análisis de Schmidt,pero con una disminución en el trabajo si estos volúmenes siguenaumentando, por lo que la función de optimización tiene un máximo.� Optimización para los volúmenes de Compresión y Expansión.� - Basado en los resultados anteriores, según los cuales Wnet aumenta
continuamente a medida que aumentamos los volúmenes de Compre-sión y/o de Expansión, debemos emplear una restricción adicional enestos volúmenes.� - Por ejemplo, podemos exigir que la suma de estos dos volúmenes sea
una constante y entonces preguntarnos cuál sería la mejor forma derepartir el espacio total disponible.
• Calculos de Transferencia de Calor:
◦ Introducción:� La derivación de las ecuaciones y las discusiones relacionadas en esta
sección no están directamente relacionadas con la optimización de laconfiguración geométrica de un motor Stirling, pero están relacionadascon la discusión de los gases de trabajo, preferiblemente.� Comúnmente se ha argumentado que la elección del fluido de traba-
jo en un motor Stirling tiene una gran influencia en la cantidad detrabajo producido debido a diferentes propiedades de los gases. Enparticular, se piensa que las pérdidas por fricción y a la transferenciade calor se pueden mejorar. El Helio y el Hidrógeno se mencionancomúnmente como favorables respecto del aire.� Además de estos argumentos, proponemos que la cantidad de calor que
se tiene que transferir a los distintos subespacios del motor Stirling(espacio de compresión, enfriamiento, regenerador, calentamiento, yespacio de expansión) están influenciados por el valor de la relación
Generador Solar de Ciclo de Aire

30015.1. ANÁLISIS PRELIMINAR DE LOS PROCESOS TERMODINÁMICOS DEL
SISTEMA SUPONIENDO UN CICLO SCHMIDT.
entre calores específicos γ = CpCv
del gas. Como primera aproximaciónpodemos decir que para los gases monoatómicos, γ tiene un valor de1,667; para los gases diatómicos γ = 1, 4 y menos de γ = 1, 3 para lasmoléculas con gran número de átomos. Esta influencia muestra quela carga de calor por cada ciclo es proporcional al valor de 1
(1−γ) . Portanto, la cantidad de calor que debe ser (extraída del) o (suministradaal) gas por el regenerador se incrementa en un factor de 2 cuando seelige desde Helio hasta Dióxido de Carbono o Metano. La razón prin-cipal es que el balance de energía en cada subespacio está afectado porel calor específico a volumen constante (Cv) y, de un modo diferente,por el calor específico a presión constante (Cp).
◦ Ecuaciones Básicas usadas en todos los Subespacios:� Cambio en el volumen del espacio donde se produce la compresión
con respecto al ángulo de giro del cigüeñal:
dVc = −0, 5Vswc sin (Θ) dΘ
� Cambio en el volumen del espacio donde se produce la expansión conrespecto al ángulo de giro del cigüeñal:
dVe = −0, 5Vswe sin (Θ + δ) dΘ
� Cambio en la presión como función de los cambios en los volúmenesde compresión y expansión:
dp = − p2
mtotRTh(dVe + (Th − Tc) dVc)
Parte de la hipótesis que subyace en el análisis del ciclo Schmidt asumeel medio de trabajo como un gas ideal con calores específicos cons-tantes. Como resultado de la energía interna específica, u, de un gasideal a temperatura T es:
u = Cv (T − T0){kJ
kg
}y, entonces, de la definición de entalpía específica (h = u+ pv), tene-mos:
h = CpT − CvT0
{kJ
kg
}La temperatura T0 se introduce para proporcionar la mejor aproxi-mación lineal al comportamiento real de u . Para gases monoatómicoscomo He, Ne, Ar, etc... T0 = 0 para un rango de temperaturas devarios centenares de grados.� También sabemos que para los gases ideales se cumple la siguiente
relación exactamente: Cp − Cv = R (Relación de Mayer).

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 301
◦ Transferencia de calor en el espacio donde se produce la compresión:
� Debido a que se supone que la temperatura permanece constante, laenergía interna específica para este espacio es:
u = Cv (T − T0)
y la entalpía específica del gas que abandona este espacio es:
h = CpTc − CvT0
debido a que durante el enfriamiento (el intercambio de masa conel espacio de compresión) también se efectúa a temperatura Tc, laecuación para la entalpía también es correcta cuando la masa fluyehacia el interior del espacio de compresión.� Considerando un elemento diferencial de masa que entra en el espacio
de compresión mientras que el cigüeñal gira un ángulo diferencial,tenemos aplicando la ecuación de la energía:
dmcCv (Tc − T0) = dQc − pdVc + dmc (CpTc − CvT0)
dQc = pdVc − (Cp − Cv)Tcdmc = pdVc −RTcdmc
La pequeña variación en el volumen es conocida y dmc se puede ob-tener diferenciando en la ecuación de estado para gases ideales parael volumen de compresión:
pdVc + Vcdp = dmcRTc
y, utilizándola para eliminar dmc de la ecuación para dQc llegamos a:
dQc = −Vcdp
◦ Transferencia de calor en el interior del espacio donde se produce la ex-pansión:
� El análisis es idéntico al realizado en el espacio de compresión en elapartado anterior y se llega a:
dQe = −Vedp
que, integrando a lo largo de un ciclo completo produce un calor posi-tivo Qe que representa el calor neto que fluye hacia el gas en el espaciode expansión.
◦ Transferencia de calor en el espacio donde se produce el enfriamiento:
Generador Solar de Ciclo de Aire

30215.2. ESTUDIO PRELIMINAR DE LOS PROCESOS DE CARGA Y DESCARGA
COMBINADO CON LOS PROCESOS DE COMPRESIÓN Y EXPANSIÓN
� Debido a que se supone que la temperatura se mantiene constante, laenergía interna específica para este espacio es:
u = Cv (T − T0)
y la entalpía específica del gas que abandona este espacio es:
h = CpT − CvT0
Debido a que el espacio donde se produce el enfriamiento recibe gasdel espacio donde se produce la compresión y el regenerador con unatemperatura Tc, la ecuación apra la entalpía también es correcta cuan-do la masa de gas fluye hacia el interior del espacio donde se produceel enfriamiento sin tener en cuenta si el flujo es de entrada desde elespacio de compresión o salida hacia el regenerador. Debido a que elvolumen en el enfriamiento es prácticamente constante, el balance deenergía nos proporciona:
dmkCv (Tc − T0) = dQk + dmk (CpTc − CvT0)
con lo que reagrupando términos:
dQk = − (Cp − Cv)Tcdmk = −RTcdmk
15.2. ESTUDIO PRELIMINAR DE LOS PROCESOS DECARGA Y DESCARGA COMBINADO CON LOSPROCESOS DE COMPRESIÓN Y EXPANSIÓN
A continuación se realiza el estudio preliminar de los procesos de carga y descargacombinado con los de compresión y expansión en el interior de un cilindro, para estableceruna referencia para el posterior estudio de los procesos combinados en el conjunto de losdos cilindros simultáneamente.
15.2.1. Compresión y Carga
En el proceso de carga de un depósito, tomamos las condiciones de remanso en elexterior, debido a que el proceso de carga es no isentrópico. Por tanto tenemos:
h01 = CpT1 +12v2
1 =γ
γ − 1P1
ρ1+
12v2
1
u01 = CvT1 +12v2
1 =1
γ − 1P1
ρ1+
12v2
1
Aplicando la Ecuación de Conservación de la masa, se tiene:

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 303
d
dt(ρd·V ) = m1
dρddt
+ρdV
dV
dt− m1
V= 0
integrándola se obtiene la expresión: PdV = (m0 +m1)·R·TdAplicando la Ecuación de Conservación de la Energía Total, tenemos:
d
dt(PdV )− (γ − 1)·m1·u0 = 0
dPddt
+PdV
dV
dt− m1·P1
V ρ1− (γ − 1)m1v
21
2V= 0
Observando esta expresión, vemos que el primer término(dPddt
)corresponde a la
evolución del ciclo, siguiendo las transformaciones que en él se producen; el segundotérmino
(PdVdVdt
)corresponde a la potencia invertida en comprimir el fluido de trabajo,
ya que estamos en la fase de compresión; continuando con el tercero(− m1·P1
V ρ1
)vemos
que se trata de la cantidad de movimiento introducida en el volumen de trabajo desde elregenerador; siendo el último de ellos
(− (γ−1)m1v21
2V
)la energía cinética introducida en el
cilindro debida a la inyección de fluido desde el regenerador.Analizando los órdenes de magnitud de los distintos términos de la expresión anterior
se tiene que los dos primeros son del mismo orden (Pd·ω) y los dos últimos son del mismoorden entre sí
(ρ1v31ε
2
l3
); evaluando los órdenes de magnitud de todos los términos se llega
a la conclusión, mediante los órdenes de magnitud de la ecuación de conservación de lamasa:
∆ρ·ω·l3 ∼ ρ1·v1·ε2
vcv1∼(εl
)2
llegándose a:
Pd·ω·l3
v1·ε2P1∼ PdP1
vcv1
l2
ε2∼ 1
entonces tenemos que todos los términos de la ecuación son del mismo orden, teniendoque retener todos los términos en el análisis.
Debemos mencionar que en el análisis de los órdenes de magnitud, hemos supuesto queel volumen tiene variaciones del orden de él mismo
(∆VV ∼ 1
); la presión, la densidad y la
temperatura también sufren variaciones del orden de ellas mismas:(
∆PP ∼
∆ρρ ∼
∆TT ∼ 1
);
cosa que es razonable analizando el movimiento del émolo y teniendo en cuenta la ecua-ción de estado de los gases perfectos.
El proceso de carga del cilindro con fluido de trabajo desde el regenerador se puedeconcebir como un aporte energético mediante cantidad de movimiento y energía cinética,
Generador Solar de Ciclo de Aire

30415.2. ESTUDIO PRELIMINAR DE LOS PROCESOS DE CARGA Y DESCARGA
COMBINADO CON LOS PROCESOS DE COMPRESIÓN Y EXPANSIÓN
que al llegar al cilindro se convierte en energía térmica al ser comprimido por el émboloen su movimiento.
Si analizamos el movimiento del émbolo tenemos que su posición sigue la expresiónx = −l
2 cos t; por lo que su velocidad v = x = l2 sin t; y el volumen de la cámara donde se
realizan todos los procesos sigue la ley: V = πD2l8 (1 + cos t)
En el caso de haber trabajado con Temperaturas en lugar de con presiones la ecuacióndiferencial a la que llegamos es:
dTddt
+m1·(Td − T1)
V ρ1− m1v
21
V ρ1·2Cv= 0
en la que, si analizamos los órdenes de magnitud llegamos a que todos los términoscuentan.
Como puede comprobarse, no podemos integrar estas expresiones, ni se pretende,siendo una fase preliminar de diseño en la que se desean conocer las relaciones entrelas variables termodinámicas con las del movimiento del sistema, teniendo por ello unasolución válida.
15.2.2. Compresión y Descarga
Debido a que el proceso de descarga de un depósito es isentrópico, y la velocidad enel interior del depósito podemos considerarla despreciable, tenemos que las condicionesde remanso las podemos tomar dentro del depósito, siendo:
h0d = hd =γ
γ − 1Pdρd
Aplicamos la ecuación de Continuidad o de Conservación de la Masa al sistema:
d
dt(ρd·V ) = m1
donde m1es el gasto de fluido de trabajo que sale del depósito. Si desarrollamos estaexpresión llegamos a:
dρddt
+ρdV
dV
dt− m1
V= 0
y si integramos la ecuación diferencial llegamos a: Pd·V = (m0 −m1)·R·Td, siendo m0lamasa que inicialmente había en el cilindro y m1la masa que ha salido del cilindro hastael instante genérico t.
Aplicando la Ecuación de Conservación de la Energía Total, tenemos:
d
dt(Pd·V ) + (γ − 1)·m1
(γ
γ − 1Pdρd
)= 0
y desarrollándola se llega a
dPddt
+PdV
dV
dt+γ·m1·PdV ·ρd
= 0

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 305
que, si la integramos, teniendo en cuenta el movimiento del émbolo se obtiene la siguienteexpresión:
Pd = P0
[1 + cos t01 + cos t
(1− m1
m0
)γ]teniendo por tanto la Temperatura a partir de la ecuación de Continuidad:
Td =P0
[1+cos t01+cos t
(1− m1
m0
)γ]π·D2·l
8 (1 + cos t)
R·(m0 −m1)
donde m1es la masa de fluido de trabajo que ha salido del depósito hasta el instante t.Si analizamos el movimiento del émbolo tenemos el mismo movimiento que en el
caso anterior, siendo: la posición sigue la expresión x = −l2 cos t; por lo que su velocidad
v = x = l2 sin t; y el volumen de la cámara donde se realizan todos los procesos sigue la
ley:
V =π·D2·l
8(1 + cos t)
En la expresión obtenida de la presión en el depósito, se puede apreciar que en elsupuesto instante final, cuando el émbolo ha llegado a su posición superior, vemos queaparece una indeterminación del tipo 0
0 ; pero ello es debido a que hemos supuesto losvolúmenes muertos nulos, y por una parte, al llegar en la compresión a un volumen finalnulo, se tendría una presión infinita, pero por otra parte, por el proceso de descarga, alevacuarse todo el fluido de trabajo, al no haber fluido, la presión tendería a cero, por esose llega a la indeterminación, pero en sucesivas etapas del diseño, se considerarán estosaspectos y se tendrá totalmente definida la función de presión dentro del cilindro.
En este caso no hemos tenido problemas a la hora de integrar debido a que lascondiciones de remanso del proceso las impone el propio cilindro, teniéndose por tantouna relación directa entre las variables implicadas en el proceso, tanto termodinámicas,como del movimiento del sistema.
15.2.3. Expansión y Carga
Debido a que el proceso de carga de un depósito es no isentrópico, debemos considerarlas condiciones de remanso en la zona exterior al cilindro:
h01 = CpT1 +12v2
1 =γ
γ − 1P1
ρ1+
12v2
1
u01 = CvT1 +12v2
1 =1
γ − 1P1
ρ1+
12v2
1
Aplicando la Ecuación de Conservación de la masa, se tiene:
d
dt(ρd·V ) = m1
Generador Solar de Ciclo de Aire

30615.2. ESTUDIO PRELIMINAR DE LOS PROCESOS DE CARGA Y DESCARGA
COMBINADO CON LOS PROCESOS DE COMPRESIÓN Y EXPANSIÓN
dρddt
+ρdV
dV
dt− m1
V= 0
integrándola se obtiene la expresión: PdV = (m0 +m1)·R·TdAplicando la Ecuación de Conservación de la Energía Total, tenemos:
d
dt(PdV )− (γ − 1)·m1·u0 = 0
dPddt
+PdV
dV
dt− m1·P1
V ρ1− (γ − 1)m1v
21
2V= 0
Para ver si tenemos que retener todos los términos de la ecuación, analizamos losórdenes de magnitud de los distintos términos, siendo los dos primeros de orden(Pd·ω),y los dos últimos de orden
(ρ1v31ε
2
l3
); con lo que si los analizamos todos ellos se tiene que
su relación es:
Pd·ω·l3
v1·ε2P1∼ PdP1
vcv1
l2
ε2∼ 1
teniendo en cuenta los órdenes de magnitud de los términos de la ecuanción de Conti-nuidad:
∆ρ·ω·l3 ∼ ρ1·v1·ε2
vcv1∼(εl
)2
por lo que, al ser todos los términos del mismo orden, no podemos despreciar ninguno deellos, proporcionando información relevante de distintos mecanismos dentro del procesoglobal.
Si analizamos el movimiento del émbolo tenemos que su posición sigue la expresiónx = l
2 cos t; por lo que su velocidad v = x = −l2 sin t; y el volumen de la cámara donde se
realizan todos los procesos sigue la ley: V = πD2l8 (1− cos t)
En el caso de haber trabajado con Temperaturas en lugar de con presiones la ecuacióndiferencial a la que llegamos es:
dTddt
+m1·(Td − T1)
V ρ1− m1v
21
V ρ1·2Cv= 0
en la que, si analizamos los órdenes de magnitud llegamos a que todos los términoscuentan.
Al ser éste un proceso de carga y tomar las condiciones de remanso en el exterior delcilindro, llegamos a una ecuación diferencial, en la que hemos visto que todos los términosson importantes y no podemos despreciar. Los términos implicados ya han sido analizadosen el primer caso y han sido relacionados con los mecanismos fisicos que ocurren en lastransformaciones, por tanto, sólo cabe mencionar en este caso que, a pesar de que laexpresión que relaciona la presión en el depósito sea la misma que en el mencionadoprimer apartado, la solución no es la misma, debido a que la evolución del volumen no esla misma como no es igual el gasto que entra desde el regenerador y por tanto teniendouna solución muy diferente.

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 307
15.2.4. Expansión y Descarga
Debido a que el proceso de descarga de un depósito es isentrópico, y la velocidad enel interior del depósito podemos considerarla despreciable, tenemos que las condicionesde remanso las podemos tomar dentro del depósito, siendo:
h0d = hd =γ
γ − 1Pdρd
Aplicamos la ecuación de Continuidad o de Conservación de la Masa al sistema:
d
dt(ρdV ) = m1
donde m1es el gasto de fluido de trabajo que sale del depósito. Si desarrollamos estaexpresión llegamos a:
dρddt
+ρdV
dV
dt− m1
V= 0
y si integramos la ecuación diferencial llegamos a: Pd·V = (m0 −m1)·R·Td, siendo m0lamasa que inicialmente había en el cilindro y m1la masa que ha salido del cilindro hastael instante genérico t.
Aplicando la Ecuación de Conservación de la Energía Total, tenemos:
d
dt(PdV ) + (γ − 1)·m1
(γ
γ − 1Pdρd
)= 0
y desarrollándola se llega a dPddt + Pd
VdVdt + γm1Pd
V ρd= 0; que, si la integramos, teniendo en
cuenta el movimiento del émbolo se obtiene la siguiente expresión:
Pd = P0
[1− cos t01− cos t
(1− m1
m0
)γ]teniendo por tanto la Temperatura a partir de la ecuación de Continuidad
Td =P0
[1−cos t01−cos t
(1− m1
m0
)γ]πD2l
8 (1− cos t)
R·(m0 −m1)
Si analizamos el movimiento del émbolo tenemos que su posición sigue la expresiónx = l
2 cos t; por lo que su velocidad v = x = −l2 sin t; y el volumen de la cámara donde se
realizan todos los procesos sigue la ley:
V =πD2l
8(1− cos t)
Analizando en este caso la expresión de la presión en el depósito tenemos que tam-bién nos encontramos con indeterminaciones, pero de la misma manera son debidas a lahipótesis introducida que los volúmenes muertos son nulos, pero en etapas sucesivas del
Generador Solar de Ciclo de Aire

30815.3. ESTUDIO DE LAS CONDICIONES EN EL REGENERADOR COMO ZONA
DE DESCARGA DESDE UN CILINDRO HACIA EL OTRO
diseño se abordarán estos aspectos y se tendrá una expresión rigurosa de la presión en elinterior del cilindro.
Al ser este caso una descarga, de nuevo, tenemos las condiciones de remanso en elinterior del cilindro y ello nos ha permitido la integración de las expresiones llegando auna relación directa entre las magnitudes implicadas.
15.3. ESTUDIO DE LAS CONDICIONES EN EL REGE-NERADOR COMO ZONA DE DESCARGA DESDEUN CILINDRO HACIA EL OTRO
Para el estudio que posteriormente se va a realizar sobre los procesos termodinámicosque se producen en el conjunto de los dos cilindros simultáneamente es necesario calcularpreviamente las condiciones en el regenerador, desde el punto de vista de una zona dedescarga desde uno de los cilindros hacia el otro, para introducir en las expresiones quenos aparecen en el posterior análisis las condiciones correspondientes al gas en el estadoen el que se encuentra a su paso por el regenerador.
Considerando un proceso isentrópico de descarga desde el cilindro que descarga hastael regenerador, se tiene:
hR = hd −v2R
2sR = sd
PR = Pc
con lo que resolviendo, se tiene:
TR = Td −v2R
2cp
ρR = ρd
(PcPd
) 1γ
TR =Pc
RgρR⇒ TR =
PdRgρd
(PcPd
) γ−1γ
vR =√
2cp(Td − TR)
mR = ρRARvR
siendo el subíndice (d) perteneciente al cilindro que descarga; (c) del cilindro en el quese produce la carga y (R) condiciones en el Regenerador.
Desarrollando un poco más las expresiones y calculando las que luego nos van a sernecesarias:
a2R =
γPRρR
=γPc
ρd
(PcPd
) 1γ
=γPcρd
(PdPc
) 1γ
=γPdρd
(PcPd
) γ−1γ
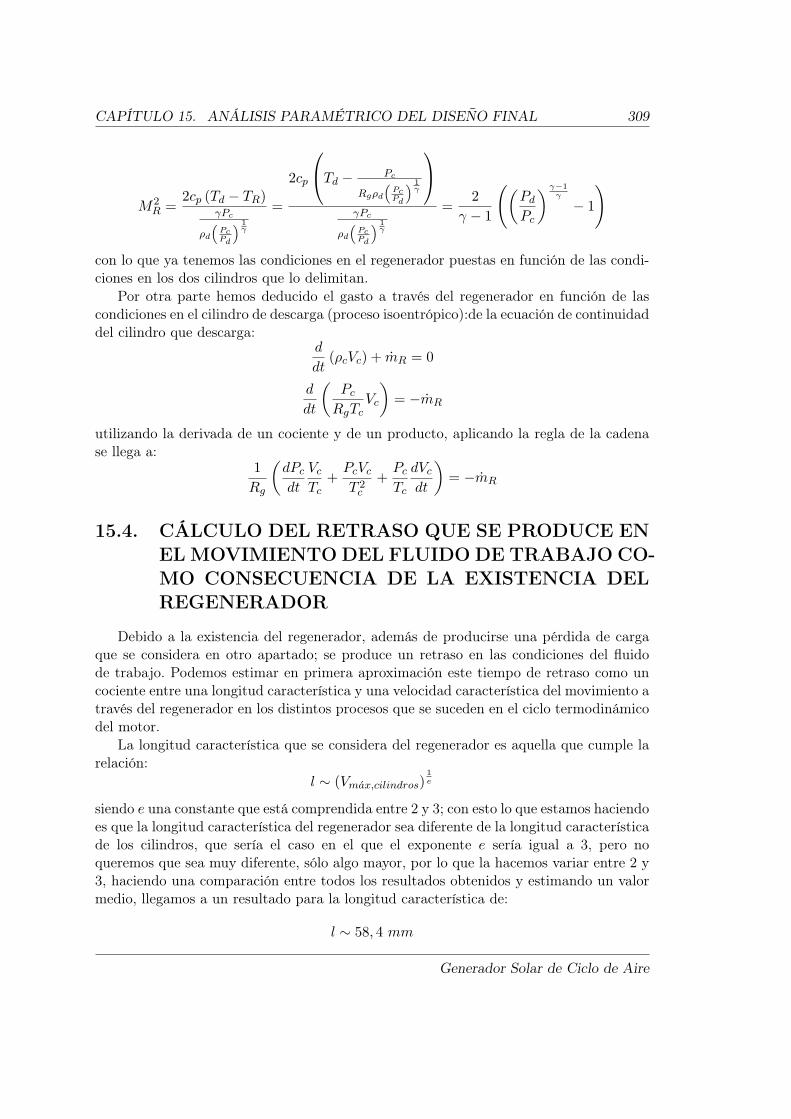
CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 309
M2R =
2cp (Td − TR)γPc
ρd
“PcPd
” 1γ
=
2cp
Td − Pc
Rgρd
“PcPd
” 1γ
γPc
ρd
“PcPd
” 1γ
=2
γ − 1
((PdPc
) γ−1γ
− 1
)
con lo que ya tenemos las condiciones en el regenerador puestas en función de las condi-ciones en los dos cilindros que lo delimitan.
Por otra parte hemos deducido el gasto a través del regenerador en función de lascondiciones en el cilindro de descarga (proceso isoentrópico):de la ecuación de continuidaddel cilindro que descarga:
d
dt(ρcVc) + mR = 0
d
dt
(PcRgTc
Vc
)= −mR
utilizando la derivada de un cociente y de un producto, aplicando la regla de la cadenase llega a:
1Rg
(dPcdt
VcTc
+PcVcT 2c
+PcTc
dVcdt
)= −mR
15.4. CÁLCULO DEL RETRASO QUE SE PRODUCE ENELMOVIMIENTODEL FLUIDO DE TRABAJO CO-MO CONSECUENCIA DE LA EXISTENCIA DELREGENERADOR
Debido a la existencia del regenerador, además de producirse una pérdida de cargaque se considera en otro apartado; se produce un retraso en las condiciones del fluidode trabajo. Podemos estimar en primera aproximación este tiempo de retraso como uncociente entre una longitud característica y una velocidad característica del movimiento através del regenerador en los distintos procesos que se suceden en el ciclo termodinámicodel motor.
La longitud característica que se considera del regenerador es aquella que cumple larelación:
l ∼ (Vmax,cilindros)1e
siendo e una constante que está comprendida entre 2 y 3; con esto lo que estamos haciendoes que la longitud característica del regenerador sea diferente de la longitud característicade los cilindros, que sería el caso en el que el exponente e sería igual a 3, pero noqueremos que sea muy diferente, sólo algo mayor, por lo que la hacemos variar entre 2 y3, haciendo una comparación entre todos los resultados obtenidos y estimando un valormedio, llegamos a un resultado para la longitud característica de:
l ∼ 58, 4 mm
Generador Solar de Ciclo de Aire
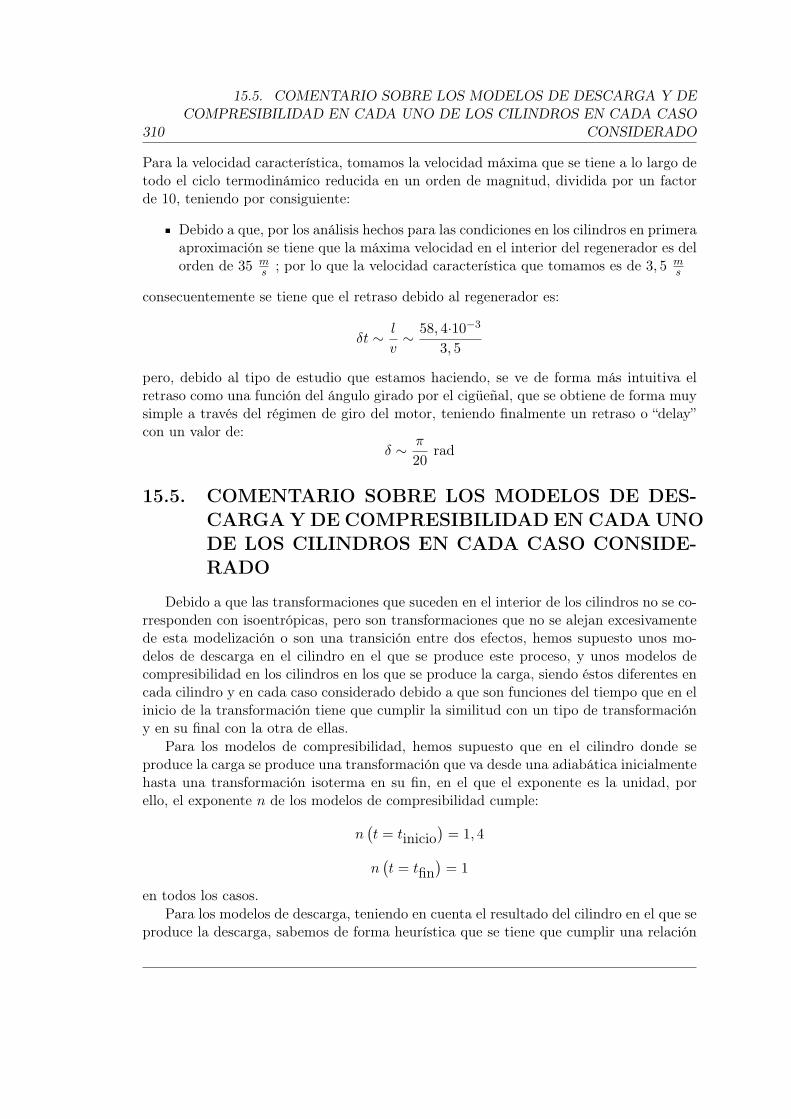
310
15.5. COMENTARIO SOBRE LOS MODELOS DE DESCARGA Y DECOMPRESIBILIDAD EN CADA UNO DE LOS CILINDROS EN CADA CASO
CONSIDERADO
Para la velocidad característica, tomamos la velocidad máxima que se tiene a lo largo detodo el ciclo termodinámico reducida en un orden de magnitud, dividida por un factorde 10, teniendo por consiguiente:
Debido a que, por los análisis hechos para las condiciones en los cilindros en primeraaproximación se tiene que la máxima velocidad en el interior del regenerador es delorden de 35 m
s ; por lo que la velocidad característica que tomamos es de 3, 5 ms
consecuentemente se tiene que el retraso debido al regenerador es:
δt ∼ l
v∼ 58, 4·10−3
3, 5
pero, debido al tipo de estudio que estamos haciendo, se ve de forma más intuitiva elretraso como una función del ángulo girado por el cigüeñal, que se obtiene de forma muysimple a través del régimen de giro del motor, teniendo finalmente un retraso o “delay”con un valor de:
δ ∼ π
20rad
15.5. COMENTARIO SOBRE LOS MODELOS DE DES-CARGAYDE COMPRESIBILIDAD EN CADAUNODE LOS CILINDROS EN CADA CASO CONSIDE-RADO
Debido a que las transformaciones que suceden en el interior de los cilindros no se co-rresponden con isoentrópicas, pero son transformaciones que no se alejan excesivamentede esta modelización o son una transición entre dos efectos, hemos supuesto unos mo-delos de descarga en el cilindro en el que se produce este proceso, y unos modelos decompresibilidad en los cilindros en los que se produce la carga, siendo éstos diferentes encada cilindro y en cada caso considerado debido a que son funciones del tiempo que en elinicio de la transformación tiene que cumplir la similitud con un tipo de transformacióny en su final con la otra de ellas.
Para los modelos de compresibilidad, hemos supuesto que en el cilindro donde seproduce la carga se produce una transformación que va desde una adiabática inicialmentehasta una transformación isoterma en su fin, en el que el exponente es la unidad, porello, el exponente n de los modelos de compresibilidad cumple:
n(t = tinicio
)= 1, 4
n(t = tfin
)= 1
en todos los casos.Para los modelos de descarga, teniendo en cuenta el resultado del cilindro en el que se
produce la descarga, sabemos de forma heurística que se tiene que cumplir una relación

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 311
entre los cocientes de las densidades y de los volúmenes de forma que la transformaciónse pueda poner de la forma :
(ρ
ρ0
)γ∝(V
V0
)R
por lo que tenemos una transición entre las transformaciones que se producen en elcilindro, que suponemos que en el instante inicial se produce una isoterma y en el instantefinal una adiabática, por tanto se tiene una variación lineal del exponente con el tiempoque dura cada proceso. En cada caso se detalla la expresión que resulta de considerarcada caso concreto.
15.6. ESTUDIO DE LOS PROCESOS QUE SE PRODU-CEN EN EL CONJUNTO DE LOS DOS CILINDROSSIMULTÁNEAMENTE
En el siguiente modelo hemos supuesto una configuración de motor Stirling tipoALFA, con dos cilindros, desfasados π
2 en los que los volúmenes máximos de los cilindrosson iguales y los volúmenes son variables senoidalmente.
A continuación se realiza un análisis detallado de cada una de las transformacionesque se realizan en el conjunto de los dos cilindros en el mismo intervalo de tiempo.
15.6.1. CASO 1 COMPRESIÓN ISÓCORA
Según hemos modelado nuestro sistema, para la primera carrera del cilindro se pro-ducen estas transformaciones. Representando el parámetro temporal t como el ángulo degiro del cigüeñal, esta carrera comprende el intervalo: 0 < t < π
2 .
CILINDRO QUE DESCARGA: COMPRESIÓN Expresando la ley que sigue elvolumen encerrado en este cilindro en función del tiempo tenemos: Vc = πD2l
8 (1, 1− sin t). En la siguiente figura podemos ver la variación de este volumen con respecto al tiempopara el ciclo completo, no sólo para esta carrera del ciclo:
Generador Solar de Ciclo de Aire

31215.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.1: Variación del Volumen de Compresión con el tiempo
Para las condiciones en el cilindro de compresión empleamos el subíndice (c). Debidoa que en este caso, en este cilindro se produce una descarga, podemos tomar las condi-ciones de remanso en el propio cilindro para realizar el estudio de las transformacionestermodinámicas que en él se producen; por lo que tenemos: h0c = γ
γ−1Pcρc
Planteando la ecuación de Continuidad en este cilindro de compresión:
mR = −dρcdtVc − ρc
dVcdt
Y haciendo lo mismo con la ecuación de la Energía, se tiene:
dPcdt
Vc + PcdVcdt
+γmRPcρc
= 0
introduciendo la expresión del gasto dada por la ecuación de continuidad:
dPcdt
Vc + PcdVcdt
+γPcρc
(−dρcdtVc − ρc
dVcdt
)= 0
1Pc
dPcdt
+1Vc
dVcdt− γ 1
ρc
dρcdt− γ 1
Vc
dVcdt
= 0

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 313
1Pc
dPcdt− γ 1
ρc
dρcdt− (γ − 1)
1Vc
dVcdt
= 0
PcPc0
=(VcVc0
)γ−1( ρcρc0
)γse puede ver que en el cilindro que descarga la evolución que se sigue no es isentrópi-ca a pesar de lo que inicialmente se pensaba; por lo que posteriormente trataremosesta expresión introduciendo un modelo de descarga que nos ayudará a obtener lasolución que perseguimos.
CILINDRO QUE CARGA: POTENCIA En este cilindro la ley que reproduceel volumen almacenado en su interior en función del parámetro temporal t es: Vp =πD2l
8 (1, 1− cos t) ; se debe tener en cuenta que hemos considerado los volúmenes muer-tos de los cilindros, representados por el 10% del volumen máximo del cilindro. En lasiguiente figura podemos ver la variación de este volumen con respecto al tiempo para elciclo completo, no sólo para esta carrera del ciclo:
Figura 15.2: Variación del Volumen de Potencia con el tiempo.
En este cilindro de potencia, que indicaremos con un subíndice (p), se produce unacarga, que no es isentrópica, por lo que resolveremos para obtener las condiciones en su
Generador Solar de Ciclo de Aire

31415.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
interior a partir de las condiciones de remanso en el regenerador, que es la zona desdela cual viene el flujo de gas y desde la cual se puede realizar el estudio de las variablestermodinámicas más correctamente, tenemos por tanto:h0p = γ
γ−1PRρR
+ 12v
2R
Si aplicamos la ecuación de Continuidad:
mR =dρpdtVp + ρp
dVpdt
de la igualdad de gastos a través del regenerador se tiene:
dρpdtVp + ρp
dVpdt
= −dρcdtVc − ρc
dVcdt
dρpdtVp + ρp
dVpdt
+dρcdtVc + ρc
dVcdt
= 0
VpVc
1ρp
dρpdt
+ρcρp
1ρc
dρcdt
+VpVc
1Vp
dVpdt
+ρcρp
1Vc
dVcdt
= 0
1ρp
dρpdt
+ρcρp
VcVp
1ρc
dρcdt
+1Vp
dVpdt
+ρcρp
VcVp
1Vc
dVcdt
= 0(ρcρp
VcVp
)(1ρc
dρcdt
+1Vc
dVcdt
)+
1ρp
dρpdt
+1Vp
dVpdt
= 0
Aplicando convenientemente la ecuación de la Energía:
d (PpVp)dt
− (γ − 1) mRh0p = 0
dPpdt
Vp + PpdVpdt− γmRPR
ρR−
(γ − 1) mRv2R
2= 0
1dt
(dPpPp
+dVpVp
)− γmRPRPpVpρR
−(γ − 1) mRv
2R
2PpVp= 0
introduciendo la expresión del gasto obtenida de la ecuación de continuidad en elpropio cilindro en el que se produce la carga:
1dt
(dPpPp
+dVpVp
)− γPRPpVpρR
(dρpdtVp + ρp
dVpdt
)−
(γ − 1) v2R
2PpVp
(dρpdtVp + ρp
dVpdt
)= 0
1dt
(dPpPp
+dVpVp
)− γPRPpρR
dρpdt− γPRρpPpVpρR
dVpdt−
(γ − 1) v2R
2PpVpdρpdtVp−
(γ − 1) v2Rρp
2PpVpdVpdt
= 0
teniendo en cuenta que a2R = γPR
ρRy M2
R =(vRaR
)2
1Pp
dPpdt
+1Vp
dVpdt−a2R
Pp
dρpdt−a2RρpPpVp
dVpdt−
(γ − 1) v2R
2PpVpdρpdtVp −
(γ − 1) v2Rρp
2PpVpdVpdt
= 0

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 315
1Pp
dPpdt
+1Vp
dVpdt−(a2R +
(γ − 1) v2R
2
)(1Pp
dρpdt
+ρpPpVp
dVpdt
)= 0
1Pp
dPpdt
+1Vp
dVpdt−a2RρpPp
(1 +
(γ − 1)2
M2R
)(1ρp
dρpdt
+1Vp
dVpdt
)= 0
teniendo en cuenta que, de la ecuación de estado de los gases ideales: Ppρp = RgTp yque a2
R = γRgTR
1Pp
dPpdt
+1Vp
dVpdt− γTR
Tp
(1 +
(γ − 1)2
M2R
)(1ρp
dρpdt
+1Vp
dVpdt
)= 0
del estudio de las condiciones en el regenerador se puede apreciar que se cumple:
TR = PcRgρc
(PpPc
) γ−1γ y:Tp = Pp
ρpRg
1Pp
dPpdt
+1Vp
dVpdt− γPcρp
Ppρc
(PpPc
) γ−1γ(
1 +(γ − 1)
2M2R
)(1ρp
dρpdt
+1Vp
dVpdt
)= 0
teniendo en cuenta que M2R = 2
γ−1
((PdPc
) γ−1γ − 1
)1Pp
dPpdt
+1Vp
dVpdt
= γPcρpPpρc
(1ρp
dρpdt
+1Vp
dVpdt
)1Pp
dPpdt
+1Vp
dVpdt
= γTcTp
(1ρp
dρpdt
+1Vp
dVpdt
)1Pp
dPpdt
+1Vp
dVpdt− γ Tc
Tp
1ρp
dρpdt− γ Tc
Tp
1Vp
dVpdt
= 0
1Pp
dPpdt− γ Tc
Tp
1ρp
dρpdt−(γTcTp− 1)
1Vp
dVpdt
= 0
que también se puede escribir en función de la presión y la densidad en vez dedejarlo en función de la relación de temperaturas:
1Pp
dPpdt− γPcρp
ρcPp
1ρp
dρpdt−(γPcρpρcPp
− 1)
1Vp
dVpdt
= 0
(falta por meter el modelo de compresibilidad y la relación entre la presión y la den-sidad en el cilindro de descarga, llegando a la ecuación diferencial con coeficientesno constantes.)
De la ecuación de la energía en el cilindro que descarga (potencia) tenemos que:
1Pp
dPpdt− γPcρp
ρcPp
1ρp
dρpdt−(γPcρpρcPp
− 1)
1Vp
dVpdt
= 0
Generador Solar de Ciclo de Aire

31615.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
1Pp
dPpdt
+1Vp
dVpdt− γPcρp
ρcPp
(1ρp
dρpdt
+1Vp
dVpdt
)= 0
y del cilindro de descarga (compresión) tenemos:
PcPc0
=(VcVc0
)γ−1( ρcρc0
)γpero de una forma heurística, sabemos que se debe cumplir:(
ρcρc0
)γ∝(VcVc0
)RPcPc0
=(VcVc0
)γ−1( ρcρc0
)γy también:
PcPc0
=(VcVc0
)γ−1+R
siendo R = 0, 6 + 0,8π t un exponente que modeliza la variación continua de la
transformación desde una isoterma para el instante inicial hasta una adiabáticaen el instante final de la transformación. Si además introducimos el modelo decompresibilidad para el cilindro en el que se produce la carga: τ = PpV
np , con
n = 1, 4− 0,8π t ; vemos que ambas relaciones las podemos introducir en la ecuación
diferencial, pero si primero escribimos la ecuación que nos resulta de igualar losgastos a través del regenerador, tenemos:(
ρcρp
VcVp
)(1ρc
dρcdt
+1Vc
dVcdt
)+
1ρp
dρpdt
+1Vp
dVpdt
= 0
que modificandola adecuadamente podemos llegar a:(ρcρp
VcVp
)(1ρc
dρcdt
+1Vc
dVcdt
)+
1ρp
dρpdt
+1Vp
dVpdt
= 0
1ρp
dρpdt
+1Vp
dVpdt
= −(ρcρp
VcVp
)(1ρc
dρcdt
+1Vc
dVcdt
)si la introducimos también en la ecuación diferencial del cilindro en el que se producela carga, tenemos:
1Pp
dPpdt
+1Vp
dVpdt
+ γPcρpρcPp
(ρcρp
VcVp
)(1ρc
dρcdt
+1Vc
dVcdt
)= 0
1Pp
dPpdt
+1Vp
dVpdt
+ γPcPp
VcVp
1
VRγc
d
(V
Rγc
)dt
+1Vc
dVcdt
= 0

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 317
introducimos ahora el modelo de compresibilidad del cilindro en el que se producela carga:
V np
τ
d(V −np τ
)dt
+1Vp
dVpdt
+ γPc0
(VcVc0
)γ−1+R(V −np τ
) VcVp
1
VRγc
d
(V
Rγc
)dt
+1Vc
dVcdt
= 0
despreciando la variación de τ con el tiempo y teniendo en cuenta las siguientes
derivadas:(d(V −np )
dt = V −np
[−dndt ln (Vp) + 1
Vp
dVpdt (−n)
])y
d
VRγc
!dt = V
Rγc
[d“Rγ
”dt ln (Vc) + 1
VcdVcdt
(Rγ
)]tenemos:
−dndt
ln (Vp)−1Vp
dVpdt
n+1Vp
dVpdt
+γPc0
(VcVc0
)γ−1+R
V 1−np τ
Vc
(1γ
dR
dtln (Vc) +
1Vc
dVcdt
(R
γ
)+
1Vc
dVcdt
)= 0
dn
dtln (Vp)+(n− 1)
1Vp
dVpdt
= γPc0
(VcVc0
)γ−1+R
Pp
VcVp
(1γ
dR
dtln (Vc) +
(R
γ+ 1)
1Vc
dVcdt
)y por tanto tenemos para la presión en el cilindro de carga:
Pp = γPc0
(VcVc0
)γ−1+R VcVp
(1γdRdt ln (Vc) +
(Rγ + 1
)1Vc
dVcdt
)dndt ln (Vp) + (n− 1) 1
Vp
dVpdt
Teniendo la ecuación del gasto a través del regenerador en el cilindro donde seproduce la descarga:
mR = −dρcdtVc − ρc
dVcdt
y teniendo en cuenta las relaciones que se obtienen finalmente en el cilindro dedescarga habiendo introducido el modelo de descarga:
ρc = ρc0
(VcVc0
)Rγ
tenemos una expresión para el gasto a través del regenerador en función de lascondiciones en el cilindro de descarga:
mR = −ρc0(VcVc0
)Rγ(Vcγ
dR
dtln (Vc) +
(R
γ+ 1)dVcdt
)y también tenemos combinando las anteriores relaciones una ecuación diferencialde donde se puede obtener la densidad en el cilindro donde se produce la carga:
ρpdVpdt
+ Vpdρpdt
= −ρc0(VcVc0
)Rγ(Vcγ
dR
dtln (Vc) +
(R
γ+ 1)dVcdt
)Generador Solar de Ciclo de Aire

31815.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
de forma que obteniendo la densidad en el cilindro de potencia, mediante la ecuaciónde estado tenemos la temperatura en el cilindro de potencia y con ella todas lasvariables termodinámicas en los dos cilindros, como tenemos también la velocidaden el regenerador y la dinámica de los émbolos es conocida, tenemos una idea muyintuitiva de los fenómenos que ocurren en el sistema.
RESULTADOS ADICIONALES
Hemos calculado las velocidades esperadas en el regenerador con el fin de determinarel “delay” que se produce entre la actuación de uno de los cilindros y hasta que lascondiciones atraviesan todo el regenerador y llegan al otro cilindro. Para este casose tiene, de las ecuaciones en el regenerador:
v2R =
2γγ − 1
Pcρc
(1−
(PpPc
) γ−1γ
)
e, introduciendo las distintas relaciones para las distintas magnitudes termodiná-micas, tenemos:
v2R = 2CpTc0
PcPc0
(Vc0Vc
)Rγ
(1−
(PpPc
) γ−1γ
)
Para tener un conocimiento más a fondo de las magnitudes termodinámicas en loscilindros, hemos calculado la temperatura en el interior de los cilindros:
• En el cilindro que se produce la descarga obtenemos la temperatura a partir dela relación que obtenemos de la ecuación de la energía que, convenientementetransformada, se tiene:
TcTc0
=(VcVc0
)γ−1+R“γ−1γ
”
• Mientras que en el cilindro en el que se produce la carga la obtenemos delmodelo de compresibilidad, de forma que:
TpTp0
=(PpPp0
)n−1n
Con el fin de introducir el “delay” que produce el regenerador en el sistema, podemosescribir:
Pp (t) = γPc (δt)(Vc (t+ δt)Vc (δt)
)γ−1+R(t+δt) Vc (t+ δt)Vp (t)
(1γdR(t+δt)
dt ln (Vc (t+ δt)) +(R(t+δt)
γ + 1)
1Vc(t+δt)
dVc(t+δt)dt
)dn(t)dt ln (Vp (t)) + [n (t)− 1] 1
Vp(t)dVp(t)dt

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 319
y también podemos escribir la ecuación que nos proporciona la velocidad a tra-vés del regenerador considerando los retrasos que se producen debidos al propioregenerador y el movimiento asociado al mismo:
v2R = 2CpTc0
PcPc0
(Vc0Vc
)Rγ
(1−
(PpPc
) γ−1γ
)en el que el retraso, aunque no se vea de forma explícita, viene introducido en elmodelo de descarga R = 0, 6+ 0,8
π (t+ δt). Su representación gráfica junto con la detodas las demás variables termodinámicas se incluye en el anexo. También podemosescribir la ecuación para las temperaturas considerando el retraso introducido por elregenerador en los distintos cilindros, introduciéndolo implícitamente en los modelosde compresibilidad en los cilindros donde se produce la carga y en el modelo dedescarga, aunque de forma implícita también está incluído en la distribución detemperaturas, de forma que para el cilindro donde se produce la carga, en este casoel de potencia se tiene:
TpTp0
=(PpPp0
)n−1n
y en el que se produce la descarga, compresión:
TcTc0
=(VcVc0
)γ−1+R“γ−1γ
”
Representando en un gráfico los resultados obtenidos de forma ordenada, podemosver la variación de los parámetros en el cilindro de Potencia más importantes, comoson:
• La variación de la Presión en el interior del cilindro con el volúmen, muyutilizado en la representación de los ciclos térmicos.
• La variación de la Presión con el tiempo, para ver en qué instante se alcanzanlos picos máximos de presión
• La variación de la Temperatura en el interior del cilindro con el tiempo, paraver los gradientes temporales de la temperatura en el motor
• La velocidad del flujo de masa a través del regenerador en esta parte del ciclo,para ver las transferencias, tanto de calor como de masa que se producen enel regenerador y ver cuáles son los instantes en los que trabaja este elementofundamental.
Hay que hacer notar que las presiones que se manejan son presiones manométricas, siem-pre relativas a las que se toman como referencia, que es, bien la presión del ambiente si setratase de un motor atmosférico, pero en este caso tomamos como referencia el cilindrode compresión y manejamos diferencias de presión respecto a la de referencia, por eso enalgunos momentos las presiones tienden a un valor nulo.
Generador Solar de Ciclo de Aire

32015.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.3: Representación gráfica de los parámetros más importantes del ciclo térmicodel motor
De la misma forma, podemos representar la variación de los mismos parámetrospara el cilindro en el que se produce la descarga, que es el cilindro de Compresión,para el que se tiene:

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 321
Figura 15.4: Variación de los parámetros fundamentales en el cilindro de compresión.
Podemos ver la influencia del retraso que introduce el comportamiento del regeneradorviendo la siguiente secuencia de figuras, en las que se ha representado el comportamientodel motor si no se tiene en cuenta el retraso, si se tiene un retraso de
(π5
),(π10
)y finalmente
la que supone un retraso de(π10
).
Generador Solar de Ciclo de Aire

32215.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.5: Variación de los parámetros en el cilindro de Potencia si no se supone ningúnretraso en el regenerador.

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 323
Figura 15.6: Variación de los parámetros en el cilindro de Compresión si no se suponeningún retraso en el regenerador.
Generador Solar de Ciclo de Aire
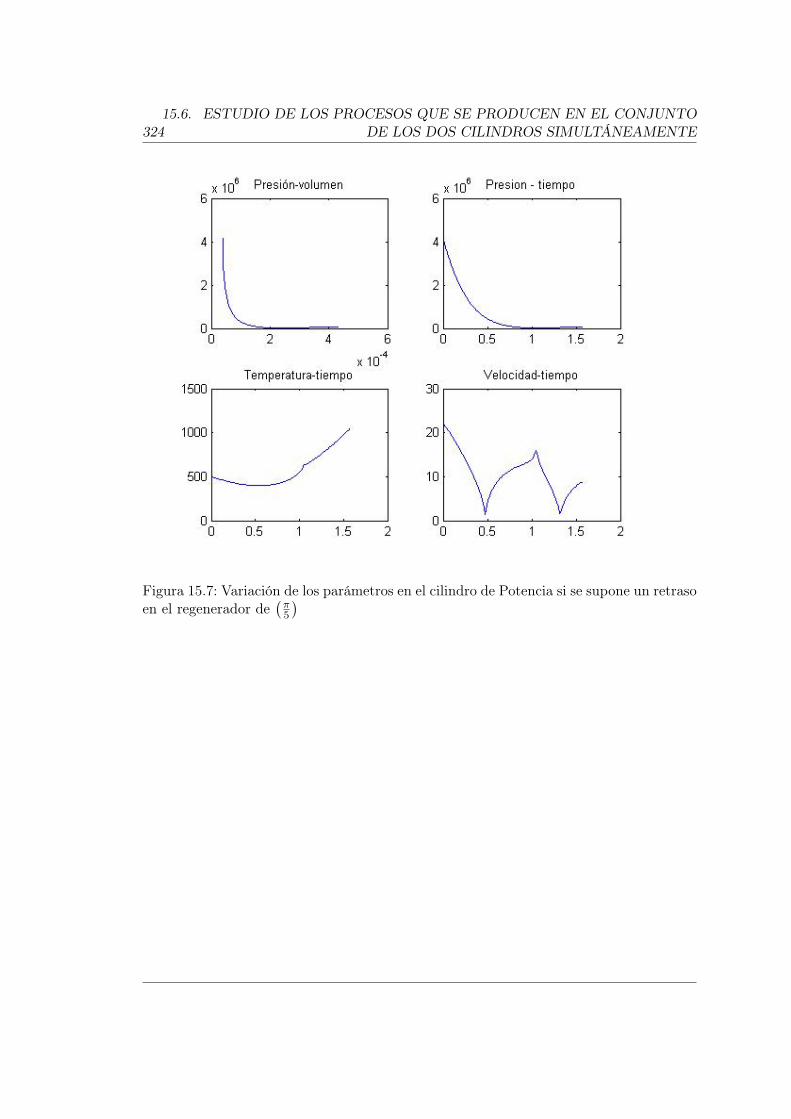
32415.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.7: Variación de los parámetros en el cilindro de Potencia si se supone un retrasoen el regenerador de
(π5
)

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 325
Figura 15.8: Variación de los parámetros en el cilindro de Compresión si se supone unretraso en el regenerador de
(π5
)
Generador Solar de Ciclo de Aire

32615.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.9: Variación de los parámetros en el cilindro de Potencia si se supone un retrasoen el regenerador de
(π10
)
15.6.2. CASO 2 EXPANSIÓN POLITRÓPICA
Como hemos visto anteriormente, las transformaciones que se producen en los ci-lindros, en ningún caso son isentrópicas, pero su modelizado se aproxima notablementepudiendo representarlas de forma muy aproximada mediante un exponente distinto delisentrópico, procesos que se denominan “politrópicos”.
En esta transformación se produce un incremento de volumen que pasa de ser elmínimo en todo el ciclo al máximo, por lo que estamos ante una expansión, como hemosdefinido anteriormente, politrópica.
Esta carrera del ciclo comprende el intervalo del parámetro temporal t: π2 < t < π.
CILINDRO QUE DESCARGA: POTENCIA En este cilindro la ley que repro-duce el volumen almacenado en su interior en función del parámetro temporal t es:Vp = πD2l
8 (1, 1− cos t) .En la siguiente figura podemos ver la variación de este volumencon respecto al tiempo para el ciclo completo, no sólo para esta carrera del ciclo:

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 327
Figura 15.10: Variación de los parámetros en el cilindro de Compresión si se supone unretraso en el regenerador de
(π10
)
Generador Solar de Ciclo de Aire

32815.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.11: Variación del Volumen de Potencia con el tiempo.
En este cilindro, que denotaremos con subíndice (p) se produce una descarga, porlo que podemos tomar las condiciones de remanso en el interior del mismo cilindro,teniendo:h0p = γ
γ−1Ppρp
Aplicando el Principio de Conservación de la Masa, o ecuación de Continuidad:
mR = −dρpdtVp − ρp
dVpdt
Y considerando la ecuación de la Energía:
d (PpVp)dt
+ (γ − 1) mRh0p = 0
dPpdt
Vp + PpdVpdt− γPpVp
ρp
dρpdt− γPpρp
ρp
dVpdt
= 0
1Pp
dPpdt
+1Vp
dVpdt− γ
ρp
dρpdt− γ
Vp
dVpdt
= 0
1Pp
dPpdt− γ
ρp
dρpdt− (γ − 1)
1Vp
dVpdt
= 0

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 329
ln(PpPp0
)= ln
(ρpρp0
)γ+ ln
(VpVp0
)γ−1
PpPp0
=(ρpρp0
)γ ( VpVp0
)γ−1
se puede ver que en el cilindro que descarga la evolución que se sigue no es isentró-pica a pesar de lo que inicialmente se pensaba; y como en el caso anterior, despuésse introducirá el correspondiente modelo de descarga para este caso.
CILINDRO QUE CARGA: COMPRESIÓN Expresando la ley que sigue el volu-men encerrado en este cilindro en función del tiempo tenemos: Vc = πD2l
8 (1, 1− sin t).Enla siguiente figura podemos ver la variación de este volumen con respecto al tiempo parael ciclo completo, no sólo para esta carrera del ciclo:
Figura 15.12: Variación del Volumen de Compresión con el tiempo
En este cilindro, que denotaremos con subíndice (c), se produce una carga, por lo quetomamos convenientemente las condiciones de remanso en el regenerador, que es la zonade la cual procede el flujo que entra en este cilindro, tenemos por tanto:h0c = γ
γ−1PRρR
+ 12v
2R
Generador Solar de Ciclo de Aire

33015.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Aplicando la ecuación de Continuidad:
mR =dρcdtVc + ρc
dVcdt
Y haciendo lo correspondiente con la ecuación de la Energía:
d (PcVc)dt
− (γ − 1) mRh0c = 0
dPcdt
Vc + PcdVcdt− γmRPR
ρR−
(γ − 1) mRv2R
2= 0
1Pc
dPcdt
+1Vc
dVcdt− mR
PcVc
(γPRρR
+(γ − 1)
2v2R
)= 0
1Pc
dPcdt
+1Vc
dVcdt−mRa
2R
PcVc
(1 +
(γ − 1)2
M2R
)= 0
1Pc
dPcdt
+1Vc
dVcdt−
a2R
PcVc
(1 +
(γ − 1)2
M2R
)(dρcdtVc + ρc
dVcdt
)= 0
1Pc
dPcdt
+1Vc
dVcdt−a2RρcPc
(1 +
(γ − 1)2
M2R
)(1ρc
dρcdt
+1Vc
dVcdt
)= 0
1Pc
dPcdt
+1Vc
dVcdt
= γTRTc
(1 +
(γ − 1)2
M2R
)(1ρc
dρcdt
+1Vc
dVcdt
)
teniendo en cuenta que TR = PdRgρd
(PcPd
) γ−1γ y que M2
R = 2γ−1
((PdPc
) γ−1γ − 1
)1Pc
dPcdt
+1Vc
dVcdt
= γPpρcρpPc
(1ρc
dρcdt
+1Vc
dVcdt
)ahora, con la ecuación de estado de gases ideales tenemos que Pp
ρp= RgTp y que
Pcρc
= RgTc
1Pc
dPcdt
+1Vc
dVcdt
= γTpTc
(1ρc
dρcdt
+1Vc
dVcdt
)1Pc
dPcdt− γTp
Tc
1ρc
dρcdt−(γTpTc− 1)
1Vc
dVcdt
= 0
que también se puede escribir en función de la presión y la densidad en vez dedejarlo en función de la relación de temperaturas:
1Pc
dPcdt− γPpρc
ρpPc
1ρc
dρcdt−(γPpρcρpPc
− 1)
1Vc
dVcdt
= 0

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 331
De la igualdad de gastos a través del regenerador tenemos:
mR = −Vpdρpdt− ρp
dVpdt
mR = Vcdρcdt
+ ρcdVcdt
Vcdρcdt
+ ρcdVcdt
+ Vpdρpdt
+ ρpdVpdt
= 0
1ρp
dρpdt
+1Vp
dVpdt
= −(ρcρp
VcVp
)(1ρc
dρcdt
+1Vc
dVcdt
)(
1ρc
dρcdt
+1Vc
dVcdt
)= −
(ρpVpρcVc
)(1ρp
dρpdt
+1Vp
dVpdt
)a partir de aquí los casos 3 y 4 son iguales que el caso 2 porque en todos ellos elcilindro que descarga es el de potencia y el que carga es el de compresión. Por tantosalen las mismas expresiones en las que habrá que cambiar las leyes de variación devolumen para considerar si lo que se produce es una compresión o una expansiónen cada cilindro, y dará lugar a las distintas soluciones en cada caso.
De la ecuación de la Energía en el cilindro en el que se produce la carga tenemos:
1Pc
dPcdt
+1Vc
dVcdt
= γPpρcρpPc
(1ρc
dρcdt
+1Vc
dVcdt
)y de la ecuación de la igualdad de gastos a través del regenerador:(
1ρc
dρcdt
+1Vc
dVcdt
)= −
(ρpVpρcVc
)(1ρp
dρpdt
+1Vp
dVpdt
)si la introducimos en la ecuación de la energía, tenemos:
1Pc
dPcdt
+1Vc
dVcdt
= γPpρcρpPc
ρpVpρcVc
(1ρp
dρpdt
+1Vp
dVpdt
)1Pc
dPcdt
+1Vc
dVcdt
= γPpPc
VpVc
(1ρp
dρpdt
+1Vp
dVpdt
)si introducimos la relación entre las variables termodinámicas en el cilindro dedescarga tenemos:
PpPp0
=(ρpρp0
)γ ( VpVp0
)γ−1
pero, como antes, sabemos heurísticamente, que se debe cumplir la siguiente rela-ción, por lo que planteamos un modelo análogo:(
ρcρc0
)γ∝(VcVc0
)RGenerador Solar de Ciclo de Aire

33215.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
y también:PpPp0
=(VpVp0
)γ−1+R
siendo R = 0, 2 + 0,8π t el exponente que modeliza la variación de la transformación
desde la isoterma para el instante inicial hasta la adiabática en el instante final.Si además introducimos el modelo de compresibilidad para el cilindro en el que seproduce la carga: τ = PcV
nc con n = 1, 8− 0,8·t
π ; e introduciéndolas en la ecuacióndiferencial:
V nc
τ
d (V −nc τ)dt
+1Vc
dVcdt
= γPp0
V −nc τ
(VpVp0
)γ−1+R VpVc
1
VRγp
d
(V
Rγp
)dt
+1Vp
dVpdt
pero teniendo en cuenta las siguientes derivadas
(d(V −nc )
dt = V −nc
[−dndt ln (Vc) + 1
VcdVcdt (−n)
])
y
d
VRγp
!dt = V
Rγp
[d“Rγ
”dt ln (Vp) + 1
Vp
dVpdt
(Rγ
)] tenemos:
−dndt
ln (Vc)−1Vc
dVcdtn+
1Vc
dVcdt
= γPp0
V −nc τ
(VpVp0
)γ−1+R VpVc
d(Rγ
)dt
ln (Vp) +1Vp
dVpdt
(R
γ
)+
1Vp
dVpdt
dn
dtln (Vc)+(n− 1)
1Vc
dVcdt
= γPp0Pc
(VpVp0
)γ−1+R VpVc
(1γ
dR
dtln (Vp) +
(R
γ+ 1)
1Vp
dVpdt
)y por tanto la presión en el cilindro en el que se produce la carga es:
Pc = γPp0
(VpVp0
)γ−1+R VpVc
(1γdRdt ln (Vp) +
(Rγ + 1
)1Vp
dVpdt
)dndt ln (Vc) + (n− 1) 1
VcdVcdt
RESULTADOS ADICIONALES
Hemos calculado las velocidades esperadas en el regenerador con el fin de determinarel “delay” que se produce entre la actuación de uno de los cilindros y hasta que lascondiciones atraviesan todo el regenerador y llegan al otro cilindro. Para este casose tiene, de las ecuaciones en el regenerador:
v2R =
2γγ − 1
Ppρp
(1−
(PcPp
) γ−1γ
)e, introduciendo las distintas relaciones para las distintas magnitudes termodiná-micas, tenemos:
v2R = 2CpTp0
PpPp0
(Vp0Vp
)Rγ
(1−
(PcPp
) γ−1γ
)

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 333
Para tener un conocimiento más a fondo de las magnitudes termodinámicas en loscilindros, hemos calculado la temperatura en el interior de los cilindros:
• En el cilindro que se produce la descarga obtenemos la temperatura a partir dela relación que obtenemos de la ecuación de la energía que, convenientementetransformada, se tiene:
TpTp0
=(VpVp0
)γ−1+R“γ−1γ
”
• Mientras que en el cilindro en el que se produce la carga la obtenemos delmodelo de compresibilidad, de forma que:
TcTc0
=(PcPc0
)n−1n
Con el fin de introducir el “delay” que produce el regenerador en el sistema, podemosescribir, para las presiones:
Pc (t) = γPp (δt)(Vp (t+ δt)Vp (δt)
)γ−1+R(t+δt) Vp (t+ δt)Vc (t)
(1γdR(t+δt)
dt ln (Vp (t+ δt)) +(R(t+δt)
γ + 1)
1Vp(t+δt)
dVp(t+δt)dt
)dn(t)dt ln (Vc (t)) + (n (t)− 1) 1
Vc(t)dVc(t)dt
si actuamos de forma análoga con las expresiones de la velocidad en el regenerador,tenemos que:
v2R = 2CpTp0
PpPp0
(Vp0Vp
)Rγ
(1−
(PcPp
) γ−1γ
)en la que el retraso viene implícito en el modelo de descarga, de forma que:R =0, 2 + 0,8
π (t+ δt). Para las temperaturas, se procede de la misma forma, en lasque los retrasos se incluyen, respectivamente, en los modelos de descarga y decompresibilidad del cilindro en el que se produce la carga: τ = PcV
nc con n =
1, 8− 0,8·(t+δt)π
TpTp0
=(VpVp0
)γ−1+R“γ−1γ
”
TcTc0
=(PcPc0
)n−1n
Representando en un gráfico los resultados obtenidos de forma ordenada, podemosver la variación de los parámetros en el cilindro de Potencia más importantes, comoson:
• La variación de la Presión en el interior del cilindro con el volúmen, muyutilizado en la representación de los ciclos térmicos.
Generador Solar de Ciclo de Aire
33415.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
• La variación de la Presión con el tiempo, para ver en qué instante se alcanzanlos picos máximos de presión
• La variación de la Temperatura en el interior del cilindro con el tiempo, paraver los gradientes temporales de la temperatura en el motor
• La velocidad del flujo de masa a través del regenerador en esta parte del ciclo,para ver las transferencias, tanto de calor como de masa que se producen enel regenerador y ver cuáles son los instantes en los que trabaja este elementofundamental.
Hay que hacer notar que las presiones que se manejan son presiones manométricas, siem-pre relativas a las que se toman como referencia, que es, bien la presión del ambiente si setratase de un motor atmosférico, pero en este caso tomamos como referencia el cilindrode compresión y manejamos diferencias de presión respecto a la de referencia, por eso enalgunos momentos las presiones tienden a un valor nulo.
Figura 15.13: Representación gráfica de los parámetros más importantes del ciclo térmicodel motor
De la misma forma, podemos representar la variación de los mismos parámetrospara el cilindro en el que se produce la descarga, que es el cilindro de Compresión,para el que se tiene:

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 335
Figura 15.14: Variación de los parámetros fundamentales en el cilindro de compresión.
Podemos ver la influencia del retraso que introduce el comportamiento del regeneradorviendo la siguiente secuencia de figuras, en las que se ha representado el comportamientodel motor si no se tiene en cuenta el retraso, si se tiene un retraso de
(π5
),(π10
)y finalmente
la que supone un retraso de(π10
).
Generador Solar de Ciclo de Aire

33615.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.15: Variación de los parámetros en el cilindro de Potencia si no se suponeningún retraso en el regenerador.

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 337
Figura 15.16: Variación de los parámetros en el cilindro de Compresión si no se suponeningún retraso en el regenerador.
Generador Solar de Ciclo de Aire

33815.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.17: Variación de los parámetros en el cilindro de Potencia si se supone unretraso en el regenerador de
(π5
)
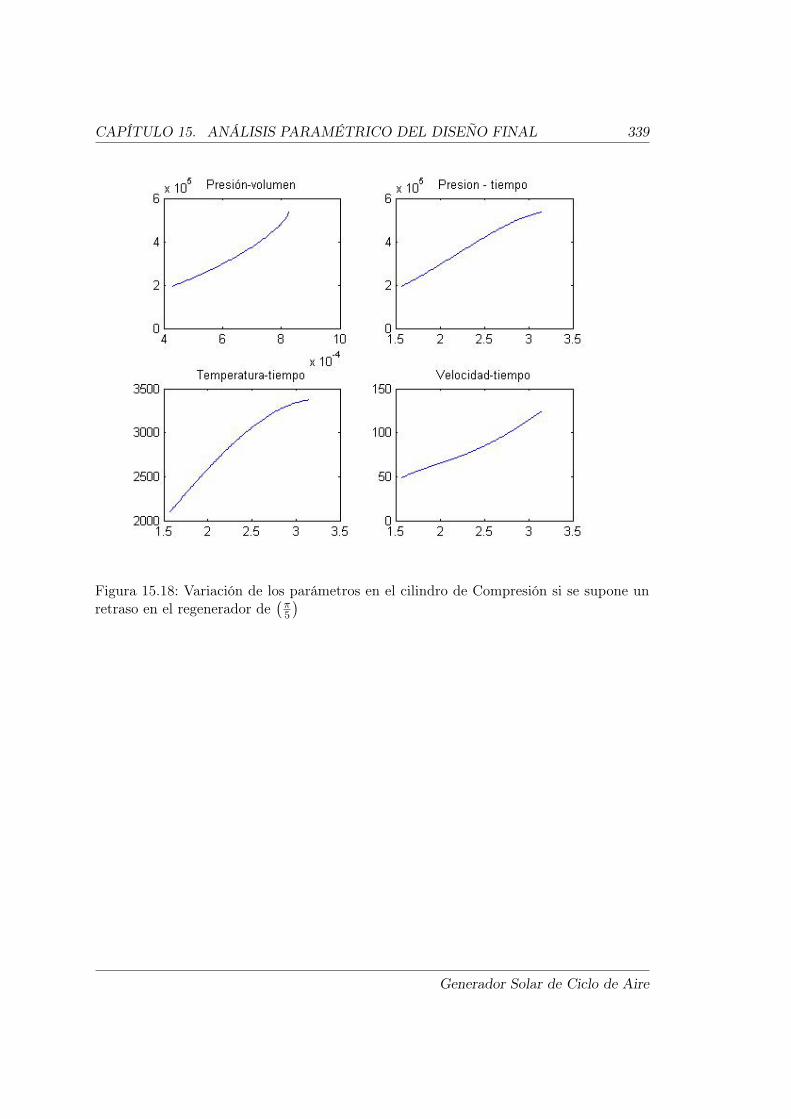
CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 339
Figura 15.18: Variación de los parámetros en el cilindro de Compresión si se supone unretraso en el regenerador de
(π5
)
Generador Solar de Ciclo de Aire

34015.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.19: Variación de los parámetros en el cilindro de Potencia si se supone unretraso en el regenerador de
(π10
)
15.6.3. CASO 3 EXPANSIÓN ISÓCORA
En este caso las transformaciones que sufren los dos cilindros se producen prácti-camente a volumen constante, y como lo que se produce es una transferencia de masadesde uno de los cilindros al otro, siendo en este caso del cilindro caliente (de potencia)al cilindro de la parte fría del motor (de compresión) el gas intercambia calor a su pasopor el regenerador y disminuye su presión, por lo que podemos hablar de una expansiónisócora.
Esta carrera ocurre en el intervalo del parámetro temporal t: π < t < 3π2
CILINDRO QUE DESCARGA: POTENCIA En este cilindro la ley que repro-duce el volumen almacenado en su interior en función del parámetro temporal t es:Vp = πD2l
8 (1, 1− cos t) .En la siguiente figura podemos ver la variación de este volumencon respecto al tiempo para el ciclo completo, no sólo para esta carrera del ciclo:

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 341
Figura 15.20: Variación de los parámetros en el cilindro de Compresión si se supone unretraso en el regenerador de
(π10
)
Generador Solar de Ciclo de Aire

34215.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.21: Variación del Volumen de Potencia con el tiempo.
En este cilindro se produce una descarga, por lo que podemos tomar las condicionesde remanso, como en los casos anteriores, en el propio cilindro; tenemos, por tanto:h0p =γγ−1
Ppρp
Aplicando el Principio de Conservación de la Masa, o ecuación de Continuidad:
mR = −dρpdtVp − ρp
dVpdt
Y procediendo de la misma forma con la ecuación de la Energía:
d (PpVp)dt
+ (γ − 1) mRh0p = 0
dPpdt
Vp + PpdVpdt− γPpVp
ρp
dρpdt− γPpρp
ρp
dVpdt
= 0
1Pp
dPpdt
+1Vp
dVpdt− γ
ρp
dρpdt− γ
Vp
dVpdt
= 0
1Pp
dPpdt− γ
ρp
dρpdt− (γ − 1)
1Vp
dVpdt
= 0

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 343
ln(PpPp0
)= ln
(ρpρp0
)γ+ ln
(VpVp0
)γ−1
PpPp0
=(ρpρp0
)γ ( VpVp0
)γ−1
se puede ver que en el cilindro que descarga la evolución que se sigue no es isen-trópica a pesar de lo que inicialmente se pensaba; por lo que posteriormente seintroducirá el correspodiente modelo de descarga, como en los casos anteriores.
CILINDRO QUE CARGA: COMPRESIÓN Expresando la ley que sigue el vo-lumen encerrado en este cilindro en función del tiempo tenemos: Vc = πD2l
8 (1, 1− sin t).En la siguiente figura podemos ver la variación de este volumen con respecto al tiempopara el ciclo completo, no sólo para esta carrera del ciclo:
Figura 15.22: Variación del Volumen de Compresión con el tiempo
En este caso, en este cilindro, las condiciones de remanso las debemos tomar en elregenerador, como en casos anteriores, por lo que se tiene:h0c = γ
γ−1PRρR
+ 12v
2R
Aplicando la ecuación de Continuidad:
mR =dρcdtVc + ρc
dVcdt
Generador Solar de Ciclo de Aire

34415.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Y procediendo análogamente con la ecuación de la Energía:
d (PcVc)dt
− (γ − 1) mRh0c = 0
dPcdt
Vc + PcdVcdt− γmRPR
ρR−
(γ − 1) mRv2R
2= 0
1Pc
dPcdt
+1Vc
dVcdt− mR
PcVc
(γPRρR
+(γ − 1)
2v2R
)= 0
1Pc
dPcdt
+1Vc
dVcdt−mRa
2R
PcVc
(1 +
(γ − 1)2
M2R
)= 0
1Pc
dPcdt
+1Vc
dVcdt−
a2R
PcVc
(1 +
(γ − 1)2
M2R
)(dρcdtVc + ρc
dVcdt
)= 0
1Pc
dPcdt
+1Vc
dVcdt−a2RρcPc
(1 +
(γ − 1)2
M2R
)(1ρc
dρcdt
+1Vc
dVcdt
)= 0
1Pc
dPcdt
+1Vc
dVcdt
= γTRTc
(1 +
(γ − 1)2
M2R
)(1ρc
dρcdt
+1Vc
dVcdt
)teniendo en cuenta que TR = Pd
Rgρd
(PcPd
) γ−1γ y que M2
R = 2γ−1
((PdPc
) γ−1γ − 1
)1Pc
dPcdt
+1Vc
dVcdt
= γPpρcρpPc
(1ρc
dρcdt
+1Vc
dVcdt
)ahora, con la ecuación de estado de gases ideales tenemos que Pp
ρp= RgTp y que
Pcρc
= RgTc1Pc
dPcdt
+1Vc
dVcdt
= γTpTc
(1ρc
dρcdt
+1Vc
dVcdt
)1Pc
dPcdt− γTp
Tc
1ρc
dρcdt−(γTpTc− 1)
1Vc
dVcdt
= 0
que también se puede escribir en función de la presión y la densidad en vez dedejarlo en función de la relación de temperaturas:
1Pc
dPcdt− γPpρc
ρpPc
1ρc
dρcdt−(γPpρcρpPc
− 1)
1Vc
dVcdt
= 0
De la igualdad de gastos a través del regenerador tenemos:
mR = −Vpdρpdt− ρp
dVpdt
mR = Vcdρcdt
+ ρcdVcdt

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 345
Vcdρcdt
+ ρcdVcdt
+ Vpdρpdt
+ ρpdVpdt
= 0
1ρc
dρcdt
+1Vc
dVcdt
= −(ρpρc
VpVc
)(1ρp
dρpdt
+1Vp
dVpdt
)= 0
Si tenemos en cuenta la ecuación de la energía en el cilindro de carga:
1Pc
dPcdt
+1Vc
dVcdt
= γPpρcρpPc
(1ρc
dρcdt
+1Vc
dVcdt
)y la ecuación de igualdad de gastos a través del regenerador:
1ρc
dρcdt
+1Vc
dVcdt
= −(ρpρc
VpVc
)(1ρp
dρpdt
+1Vp
dVpdt
)= 0
las combinamos y resulta:
1Pc
dPcdt
+1Vc
dVcdt
= −γPpPc
VpVc
(1ρp
dρpdt
+1Vp
dVpdt
)ahora, teniendo en cuenta los resultados obtenidos en el cilindro de descarga:
PpPp0
=(ρpρp0
)γ ( VpVp0
)γ−1
sabemos, que se debe cumplir la relación siguiente:(ρpρp0
)γ∝(VpVp0
)Rdonde R es un exponente que produce una variación en la transformación siendoen el instante inicial isoterma hasta ser adiabática en su fin. En este caso, parael intervalo de tiempos en el que es válido este modelo, resulta ser la siguienteexpresión: R = −0, 2 + 0,8
π t por lo que tenemos:
ρpρp0
=(VpVp0
)Rγ
y también:PpPp0
=(VpVp0
)γ−1+R
por lo que sustituyéndolas en la ecuación de la energía, tenemos:
1Pc
dPcdt
+1Vc
dVcdt
= −γPp0Pc
(VpVp0
)γ−1+R VpVc
(1ρp0
(Vp0Vp
)Rγ d
dt
(ρp0
(VpVp0
)Rγ
)+
1Vp
dVpdt
)
Generador Solar de Ciclo de Aire

34615.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
si introducimos, de la misma forma el modelo de compresibilidad que hemos su-puesto para el cilindro en el que produce la carga τ = PcV
nc ⇒Pc = V −nc τ , junto
con n = 2, 2− 0,8·tπ ; tenemos:
1V −nc τ
d (V −nc τ)dt
+1Vc
dVcdt
= −γ Pp0
V −nc τ
(VpVp0
)γ−1+R VpVc
(1ρp0
(Vp0Vp
)Rγ d
dt
(ρp0
(VpVp0
)Rγ
)+
1Vp
dVpdt
)despreciando la variación del coeficiente τ con el tiempo y simplificando llegamosa:
1V −nc
d (V −nc )dt
+1Vc
dVcdt
= −γ Pp0
V −nc τ
(VpVp0
)γ−1+R VpVc
1
VRγp
d
dt
(V
Rγp
)+
1Vp
dVpdt
haciendo aparte las derivadas: d(V
−nc )dt = V −nc
(−dndt ln (Vc) + 1
VcdVcdt (−n)
); y d
dt
(V
Rγp
)=
VRγp
(d“Rγ
”dt ln (Vp) + 1
Vp
dVpdt
(Rγ
)), con lo que nos queda:
−dndt
ln (Vc)+1Vc
dVcdt
(−n)+1Vc
dVcdt
= −γ Pp0
V −nc τ
(VpVp0
)γ−1+R VpVc
d(Rγ
)dt
ln (Vp) +1Vp
dVpdt
(R
γ
)+
1Vp
dVpdt
dn
dtln (Vc)+(n− 1)
1Vc
dVcdt
= γPp0Pc
(VpVp0
)γ−1+R VpVc
(1γ
dR
dtln (Vp) +
(R
γ+ 1)
1Vp
dVpdt
)y finalmente:
Pc = γPp0
(VpVp0
)γ−1+R VpVc
(1γdRdt ln (Vp) +
(Rγ + 1
)1Vp
dVpdt
)dndt ln (Vc) + (n− 1) 1
VcdVcdt
RESULTADOS ADICIONALES
Hemos calculado las velocidades esperadas en el regenerador con el fin de determinarel “delay” que se produce entre la actuación de uno de los cilindros y hasta que lascondiciones atraviesan todo el regenerador y llegan al otro cilindro. Para este casose tiene, de las ecuaciones en el regenerador:
v2R =
2γγ − 1
Ppρp
(1−
(PcPp
) γ−1γ
)e, introduciendo las distintas relaciones para las distintas magnitudes termodiná-micas, tenemos:
v2R = 2CpTp0
PpPp0
(Vp0Vp
)Rγ
(1−
(PcPp
) γ−1γ
)

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 347
Para tener un conocimiento más a fondo de las magnitudes termodinámicas en loscilindros, hemos calculado la temperatura en el interior de los cilindros:
• En el cilindro que se produce la descarga obtenemos la temperatura a partir dela relación que obtenemos de la ecuación de la energía que, convenientementetransformada, se tiene:
TpTp0
=(VpVp0
)γ−1+R“γ−1γ
”
• Mientras que en el cilindro en el que se produce la carga la obtenemos delmodelo de compresibilidad, de forma que:
TcTc0
=(PcPc0
)n−1n
Con el fin de introducir el “delay” que produce el regenerador en el sistema, podemosescribir la expresión de las presiones de la forma:
Pc (t) = γPp (δt)(Vp (t+ δt)Vp (δt)
)γ−1+R(t+δt) Vp (t+ δt)Vc (t)
(1γdR(t+δt)
dt ln (Vp (t+ δt)) +(R(t+δt)
γ + 1)
1Vp(t+δt)
dVp(t+δt)dt
)dn(t)dt ln (Vc (t)) + (n (t)− 1) 1
Vc(t)dVc(t)dt
si hacemos lo mismo con la expresión de la velocidad del gas al atravesar el rege-nerador, tenemos:
v2R = 2CpTp0
PpPp0
(Vp0Vp
)Rγ
(1−
(PcPp
) γ−1γ
)en la que el retraso va incluído de forma implícita en el modelo de descarga, enla R = −0, 2 + 0,8
π (t+ δt). Para las expresiones de las temperaturas, considerandoconvenientemente los retrasos, incluídos en los modelos de descarga y de compresi-bilidad en el caso de la carga; n = 2, 2− 0,8·(t+δt)
π :
TpTp0
=(VpVp0
)γ−1+R“γ−1γ
”
TcTc0
=(PcPc0
)n−1n
Representando en un gráfico los resultados obtenidos de forma ordenada, podemosver la variación de los parámetros en el cilindro de Potencia más importantes, comoson:
• La variación de la Presión en el interior del cilindro con el volúmen, muyutilizado en la representación de los ciclos térmicos.
Generador Solar de Ciclo de Aire

34815.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
• La variación de la Presión con el tiempo, para ver en qué instante se alcanzanlos picos máximos de presión
• La variación de la Temperatura en el interior del cilindro con el tiempo, paraver los gradientes temporales de la temperatura en el motor
• La velocidad del flujo de masa a través del regenerador en esta parte del ciclo,para ver las transferencias, tanto de calor como de masa que se producen enel regenerador y ver cuáles son los instantes en los que trabaja este elementofundamental.
Hay que hacer notar que las presiones que se manejan son presiones manométricas, siem-pre relativas a las que se toman como referencia, que es, bien la presión del ambiente si setratase de un motor atmosférico, pero en este caso tomamos como referencia el cilindrode compresión y manejamos diferencias de presión respecto a la de referencia, por eso enalgunos momentos las presiones tienden a un valor nulo.
Figura 15.23: Representación gráfica de los parámetros más importantes del ciclo térmicodel motor
De la misma forma, podemos representar la variación de los mismos parámetrospara el cilindro en el que se produce la descarga, que es el cilindro de Compresión,para el que se tiene:

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 349
Figura 15.24: Variación de los parámetros fundamentales en el cilindro de compresión.
Podemos ver la influencia del retraso que introduce el comportamiento del regeneradorviendo la siguiente secuencia de figuras, en las que se ha representado el comportamientodel motor si no se tiene en cuenta el retraso, si se tiene un retraso de
(π5
),(π10
)y finalmente
la que supone un retraso de(π10
).
Generador Solar de Ciclo de Aire

35015.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.25: Variación de los parámetros en el cilindro de Potencia si no se suponeningún retraso en el regenerador.

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 351
Figura 15.26: Variación de los parámetros en el cilindro de Compresión si no se suponeningún retraso en el regenerador.
Generador Solar de Ciclo de Aire

35215.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.27: Variación de los parámetros en el cilindro de Potencia si se supone unretraso en el regenerador de
(π5
)

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 353
Figura 15.28: Variación de los parámetros en el cilindro de Compresión si se supone unretraso en el regenerador de
(π5
)
Generador Solar de Ciclo de Aire

35415.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.29: Variación de los parámetros en el cilindro de Potencia si se supone unretraso en el regenerador de
(π10
)
15.6.4. CASO 4 COMPRESIÓN POLITRÓPICA
Como en el caso anterior, tenemos que la transformación es politrópica, pero en estecaso se pasa desde el volumen máximo al mínimo, por lo que el proceso correspondientees una compresión, tenemos por tanto una compresión politrópica.
Esta transformación se lleva a cabo en el sistema en el intervalo temporal : 3π2 < t <
2π.
CILINDRO QUE DESCARGA: POTENCIA En este cilindro la ley que repro-duce el volumen almacenado en su interior en función del parámetro temporal t es:Vp = πD2l
8 (1, 1− cos t) .En la siguiente figura podemos ver la variación de este volumencon respecto al tiempo para el ciclo completo, no sólo para esta carrera del ciclo:
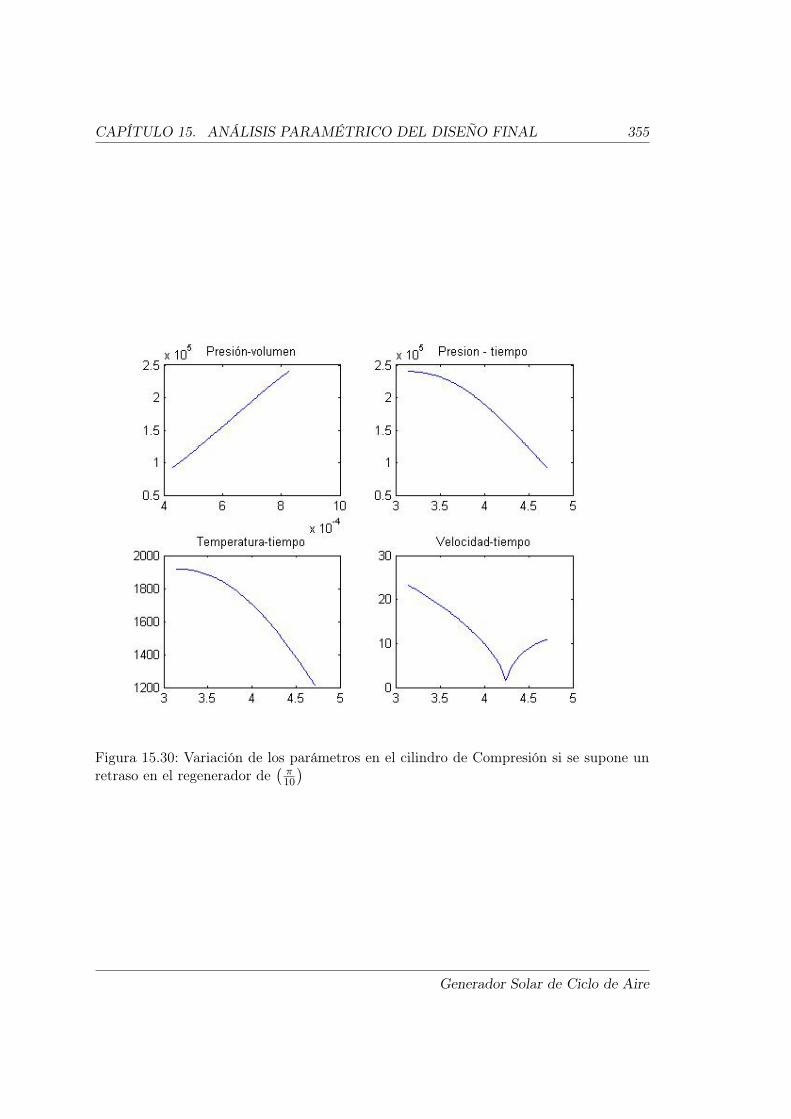
CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 355
Figura 15.30: Variación de los parámetros en el cilindro de Compresión si se supone unretraso en el regenerador de
(π10
)
Generador Solar de Ciclo de Aire

35615.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.31: Variación del Volumen de Potencia con el tiempo.
En este cilindro se produce una descarga, por lo que tomamos como en casos ante-riores, las condiciones de remanso en el interior del mismo cilindro: h0p = γ
γ−1Ppρp
Aplicando la ecuación de Continuidad:
mR = −dρpdtVp − ρp
dVpdt
Aplicando la ecuación de la Energía:
d (PpVp)dt
+ (γ − 1) mRh0p = 0
dPpdt
Vp + PpdVpdt− γPpVp
ρp
dρpdt− γPpρp
ρp
dVpdt
= 0
1Pp
dPpdt
+1Vp
dVpdt− γ
ρp
dρpdt− γ
Vp
dVpdt
= 0
1Pp
dPpdt− γ
ρp
dρpdt− (γ − 1)
1Vp
dVpdt
= 0

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 357
ln(PpPp0
)= ln
(ρpρp0
)γ+ ln
(VpVp0
)γ−1
PpPp0
=(ρpρp0
)γ ( VpVp0
)γ−1
vemos que no sale una evolución isentrópica como cabía esperar; se introduce mástarde el correspondiente modelo de descarga aplicable para este cilindro.
CILINDRO QUE CARGA: COMPRESIÓN Expresando la ley que sigue el vo-lumen encerrado en este cilindro en función del tiempo tenemos: Vc = πD2l
8 (1, 1− sin t).En la siguiente figura podemos ver la variación de este volumen con respecto al tiempopara el ciclo completo, no sólo para esta carrera del ciclo:
Figura 15.32: Variación del Volumen de Compresión con el tiempo
En este cilindro se produce una carga, tenemos que tomar por tanto las condicionesde remanso en el regenerador, teniendo consecuentemente: h0c = γ
γ−1PRρR
+ 12v
2R
Si planteamos el Principio de Conservación de la Masa, o ecuación de Continuidad:
mR =dρcdtVc + ρc
dVcdt
Generador Solar de Ciclo de Aire

35815.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Y haciendo lo mismo con la ecuación de la Energía:
d (PcVc)dt
− (γ − 1) mRh0c = 0
dPcdt
Vc + PcdVcdt− γmRPR
ρR−
(γ − 1) mRv2R
2= 0
1Pc
dPcdt
+1Vc
dVcdt− mR
PcVc
(γPRρR
+(γ − 1)
2v2R
)= 0
1Pc
dPcdt
+1Vc
dVcdt−mRa
2R
PcVc
(1 +
(γ − 1)2
M2R
)= 0
1Pc
dPcdt
+1Vc
dVcdt−
a2R
PcVc
(1 +
(γ − 1)2
M2R
)(dρcdtVc + ρc
dVcdt
)= 0
1Pc
dPcdt
+1Vc
dVcdt−a2RρcPc
(1 +
(γ − 1)2
M2R
)(1ρc
dρcdt
+1Vc
dVcdt
)= 0
1Pc
dPcdt
+1Vc
dVcdt
= γTRTc
(1 +
(γ − 1)2
M2R
)(1ρc
dρcdt
+1Vc
dVcdt
)
teniendo en cuenta que TR = PdRgρd
(PcPd
) γ−1γ y que M2
R = 2γ−1
((PdPc
) γ−1γ − 1
)1Pc
dPcdt
+1Vc
dVcdt
= γPpρcρpPc
(1ρc
dρcdt
+1Vc
dVcdt
)ahora, con la ecuación de estado de gases ideales tenemos que Pp
ρp= RgTp y que
Pcρc
= RgTc
1Pc
dPcdt
+1Vc
dVcdt
= γTpTc
(1ρc
dρcdt
+1Vc
dVcdt
)1Pc
dPcdt− γTp
Tc
1ρc
dρcdt−(γTpTc− 1)
1Vc
dVcdt
= 0
que también se puede escribir en función de la presión y la densidad en vez dedejarlo en función de la relación de temperaturas:
1Pc
dPcdt− γPpρc
ρpPc
1ρc
dρcdt−(γPpρcρpPc
− 1)
1Vc
dVcdt
= 0
1Pc
dPcdt
+1Vc
dVcdt
= γPpρcρpPc
(1ρc
dρcdt
+1Vc
dVcdt
)

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 359
De la igualdad de gastos a través del regenerador tenemos:
mR = −Vpdρpdt− ρp
dVpdt
mR = Vcdρcdt
+ ρcdVcdt
Vcdρcdt
+ ρcdVcdt
+ Vpdρpdt
+ ρpdVpdt
= 0(ρcρp
VcVp
)(1ρc
dρcdt
+1Vc
dVcdt
)+
1ρp
dρpdt
+1Vp
dVpdt
= 0
1ρc
dρcdt
+1Vc
dVcdt
= −(ρpρc
VpVc
)(1ρp
dρpdt
+1Vp
dVpdt
)Ahora, teniendo en cuenta la ecuación de la energía en el cilindro donde se producela carga:
1Pc
dPcdt
+1Vc
dVcdt
= γPpρcρpPc
(1ρc
dρcdt
+1Vc
dVcdt
)e, incluyendo la ecuación que se tiene al igualar los gastos de ambos cilindros através del regenerador:
1ρc
dρcdt
+1Vc
dVcdt
= −(ρpρc
VpVc
)(1ρp
dρpdt
+1Vp
dVpdt
)si las combinamos, tenemos:
1Pc
dPcdt
+1Vc
dVcdt
= −γPpPc
VpVc
(1ρp
dρpdt
+1Vp
dVpdt
)si tenemos en cuenta los resultados obtenidos en el cilindro en el que se produce ladescarga, tenemos:
PpPp0
=(ρpρp0
)γ ( VpVp0
)γ−1
que, modificándolo convenientemente, ya que se tiene que cumplir la relación:(ρpρp0
)γ∝(VpVp0
)Rdonde R es un exponente que produce una variación en la transformación siendoen el instante inicial isoterma hasta ser adiabática en su fin. En este caso, parael intervalo de tiempos en el que es válido este modelo, resulta ser la siguienteexpresión: R = −0, 6 + 0,8
π t por lo que tenemos:
ρpρp0
=(VpVp0
)Rγ
Generador Solar de Ciclo de Aire

36015.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
y también:PpPp0
=(VpVp0
)γ−1+R
con lo que lo incluímos en la ecuación de la energía, de forma que nos queda:
1Pc
dPcdt
+1Vc
dVcdt
= −γPp0Pc
(VpVp0
)γ−1+R VpVc
(1ρp0
(Vp0Vp
)Rγ d
dt
(ρp0
(VpVp0
)Rγ
)+
1Vp
dVpdt
)además tenemos en cuenta el modelo de compresibilidad que hemos tenido en cuentapara los cilindros en los que se produce la carga: τ = PcV
nc ⇒Pc = V −nc τ , con
n = 2, 6− 0,8·tπ tenemos:
1V −nc τ
d (V −nc τ)dt
+1Vc
dVcdt
= −γPp0Pc
(VpVp0
)γ−1+R VpVc
(1ρp0
(Vp0Vp
)Rγ d
dt
(ρp0
(VpVp0
)Rγ
)+
1Vp
dVpdt
)despreciando, de nuevo, la variación de τ con el tiempo, tenemos que:
1V −nc
d (V −nc )dt
+1Vc
dVcdt
= −γPp0Pc
(VpVp0
)γ−1+R VpVc
1
VRγp
d
dt
(V
Rγp
)+
1Vp
dVpdt
ahora tenemos en cuenta las siguientes derivadas : d(V
−nc )dt = V −nc
(−dndt ln (Vc) + 1
VcdVcdt (−n)
); y d
dt
(V
Rγp
)= V
Rγp
(d“Rγ
”dt ln (Vp) + 1
Vp
dVpdt
(Rγ
)), con lo que nos queda:
−dndt
ln (Vc)+1Vc
dVcdt
(−n)+1Vc
dVcdt
= −γPp0Pc
(VpVp0
)γ−1+R VpVc
d(Rγ
)dt
ln (Vp) +1Vp
dVpdt
(R
γ
)+
1Vp
dVpdt
dn
dtln (Vc)+(n− 1)
1Vc
dVcdt
= γPp0Pc
(VpVp0
)γ−1+R VpVc
(1γ
dR
dtln (Vp) +
(R
γ+ 1)
1Vp
dVpdt
)y tenemos finalmente:
Pc = γPp0
(VpVp0
)γ−1+R VpVc
(1γdRdt ln (Vp) +
(Rγ + 1
)1Vp
dVpdt
)dndt ln (Vc) + (n− 1) 1
VcdVcdt
RESULTADOS ADICIONALES
Hemos calculado las velocidades esperadas en el regenerador con el fin de determinarel “delay” que se produce entre la actuación de uno de los cilindros y hasta que lascondiciones atraviesan todo el regenerador y llegan al otro cilindro. Para este casose tiene, de las ecuaciones en el regenerador:
v2R =
2γγ − 1
Ppρp
(1−
(PcPp
) γ−1γ
)

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 361
e, introduciendo las distintas relaciones para las distintas magnitudes termodiná-micas, tenemos:
v2R = 2CpTp0
PpPp0
(Vp0Vp
)Rγ
(1−
(PcPp
) γ−1γ
)
Para tener un conocimiento más a fondo de las magnitudes termodinámicas en loscilindros, hemos calculado la temperatura en el interior de los cilindros:
• En el cilindro que se produce la descarga obtenemos la temperatura a partir dela relación que obtenemos de la ecuación de la energía que, convenientementetransformada, se tiene:
TpTp0
=(VpVp0
)γ−1+R“γ−1γ
”
• Mientras que en el cilindro en el que se produce la carga la obtenemos delmodelo de compresibilidad, de forma que:
TcTc0
=(PcPc0
)n−1n
Con el fin de introducir el “delay” que produce el regenerador en el sistema, podemosescribir la expresión para las presiones en el cilindro donde se produce la carga:
Pc (t) = γPp (δt)(Vp (t+ δt)Vp (δt)
)γ−1+R(t+δt) Vp (t+ δt)Vc (t)
(1γdR(t+δt)
dt ln (Vp (t+ δt)) +(R(t+δt)
γ + 1)
1Vp(t+δt)
dVp(t+δt)dt
)dn(t)dt ln (Vc (t)) + (n (t)− 1) 1
Vc(t)dVc(t)dt
y si procedemos de la misma forma con la expresión de la velocidad del fluido detrabajo a través del regenerador, se tiene:
v2R = 2CpTp0
PpPp0
(Vp0Vp
)Rγ
(1−
(PcPp
) γ−1γ
)en la que el retraso viene de forma implícita en el modelo de descarga, siendo: R =−0, 6 + 0,8
π (t+ δt) . Haciendo algo análogo con las expresiones de las temperaturasen los dos cilindros tenemos las siguientes expresiones, en las que los retrasos vienenimplícitos en el modelo de descarga y en el modelo de compresibilidad del cilindroen el que se produce la carga, con n = 2, 6− 0,8·(t+δt)
π :
TpTp0
=(VpVp0
)γ−1+R“γ−1γ
”
TcTc0
=(PcPc0
)n−1n
Generador Solar de Ciclo de Aire

36215.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Representando en un gráfico los resultados obtenidos de forma ordenada, podemosver la variación de los parámetros en el cilindro de Potencia más importantes, comoson:
• La variación de la Presión en el interior del cilindro con el volúmen, muyutilizado en la representación de los ciclos térmicos.
• La variación de la Presión con el tiempo, para ver en qué instante se alcanzanlos picos máximos de presión
• La variación de la Temperatura en el interior del cilindro con el tiempo, paraver los gradientes temporales de la temperatura en el motor
• La velocidad del flujo de masa a través del regenerador en esta parte del ciclo,para ver las transferencias, tanto de calor como de masa que se producen enel regenerador y ver cuáles son los instantes en los que trabaja este elementofundamental.
Hay que hacer notar que las presiones que se manejan son presiones manométricas, siem-pre relativas a las que se toman como referencia, que es, bien la presión del ambiente si setratase de un motor atmosférico, pero en este caso tomamos como referencia el cilindrode compresión y manejamos diferencias de presión respecto a la de referencia, por eso enalgunos momentos las presiones tienden a un valor nulo.
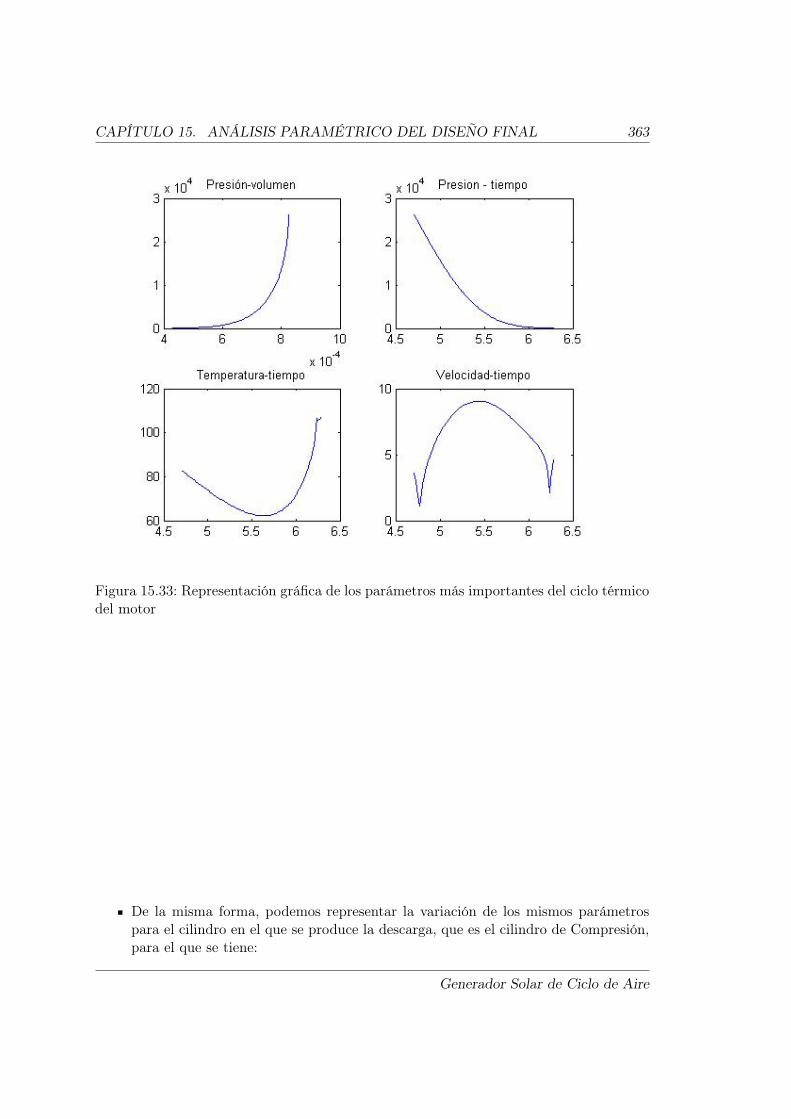
CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 363
Figura 15.33: Representación gráfica de los parámetros más importantes del ciclo térmicodel motor
De la misma forma, podemos representar la variación de los mismos parámetrospara el cilindro en el que se produce la descarga, que es el cilindro de Compresión,para el que se tiene:
Generador Solar de Ciclo de Aire

36415.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.34: Variación de los parámetros fundamentales en el cilindro de compresión.
Podemos ver la influencia del retraso que introduce el comportamiento del regeneradorviendo la siguiente secuencia de figuras, en las que se ha representado el comportamientodel motor si no se tiene en cuenta el retraso, si se tiene un retraso de
(π5
),(π10
)y finalmente
la que supone un retraso de(π10
).

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 365
Figura 15.35: Variación de los parámetros en el cilindro de Potencia si no se suponeningún retraso en el regenerador.
Generador Solar de Ciclo de Aire

36615.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.36: Variación de los parámetros en el cilindro de Compresión si no se suponeningún retraso en el regenerador.

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 367
Figura 15.37: Variación de los parámetros en el cilindro de Potencia si se supone unretraso en el regenerador de
(π5
)
Generador Solar de Ciclo de Aire

36815.6. ESTUDIO DE LOS PROCESOS QUE SE PRODUCEN EN EL CONJUNTO
DE LOS DOS CILINDROS SIMULTÁNEAMENTE
Figura 15.38: Variación de los parámetros en el cilindro de Compresión si se supone unretraso en el regenerador de
(π5
)

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 369
Figura 15.39: Variación de los parámetros en el cilindro de Potencia si se supone unretraso en el regenerador de
(π10
)
15.7. CONCLUSIONES FINALES
Como se ha podido comprobar, la complejidad del problema, incluso desde el punto devista de la modelización, hace muy difícil el estudio de los ciclos térmicos de estos motores,pero dado que con los desarrollos de las nuevas tecnologías, como la simulación numéricay las herramientas informáticas aplicadas a la matemática discreta, nos permiten abordareste tipo de problemas, de esta forma se puede ver cómo se comportan las principalesmagnitudes del ciclo térmico del motor, el proceso de modelización, hipótesis que se hanido realizando, así como la evolución del desarrollo, desde las primeras etapas básicas,hasta los complejos desarrollos matemáticos, ayudados por la programación informática,y que han dado lugar a este análisis.
De esta forma hemos podido observar como afectan las variaciones de las magnitudesfundamentales del comportamiento del ciclo térmico tanto con la geometría como con laoperación del motor, diferenciando en este caso las variables de diseño y las de operacióndel mismo, en las que para un buen diseño del motor, se han tenido en cuenta de laforma más realista posible dentro de las posibilidades de cálculo de las que se disponen
Generador Solar de Ciclo de Aire

370 15.7. CONCLUSIONES FINALES
Figura 15.40: Variación de los parámetros en el cilindro de Compresión si se supone unretraso en el regenerador de
(π10
)

CAPÍTULO 15. ANÁLISIS PARAMÉTRICO DEL DISEÑO FINAL 371
actualmente.
Generador Solar de Ciclo de Aire

372 15.7. CONCLUSIONES FINALES

Capítulo 16
Congelación del diseño y modeloCAD
A lo largo de todo este documento se han ido detallando las diversas fases de diseñodel motor. A lo largo de dichas fases se han ido obteniendo conclusiones que han per-mitido seleccionar los diversos parámetros (geométricos, termofluidodinámicos,etc.) queconfiguran el diseño. Al final todos esos parámetros han permitido eleborar un diseñocompleto del motor. Dicho diseño ha sido realizado con la ayuda de un programa deCAD. Se presentan aquí varias imágenes del diseño final.
373

374
Figura 16.1: Imagen externa del motor.

CAPÍTULO 16. CONGELACIÓN DEL DISEÑO Y MODELO CAD 375
Figura 16.2: Imagen externa del motor con el bloque transparente.
Generador Solar de Ciclo de Aire

376
Figura 16.3: Imagen del mecanismo interno sin el bloque.

CAPÍTULO 16. CONGELACIÓN DEL DISEÑO Y MODELO CAD 377
Figura 16.4: Vista lateral del mecanismo interno.
Generador Solar de Ciclo de Aire

378
555
400
280
280
275
300
300
195
Figura 16.5: Principales vistas del motor junto con las dimensiones principales del mismo.

Capítulo 17
Conclusiones
Una vez congelado el diseño del motor y dada la vocación industrial del proyecto elsiguiente paso lógico es en diseño en detalle constructivo del mismo con vistas a facilitarla construcción de un prototipo o demostrador. De esta forma„ en paralelo al desarrollode los trabajos y una vez que éstos tenían la entidad suficiente, durante 2009 ENGLOBETECHNOLOGIES planteó iniciativas para poner en conocimiento de empresas potencia-les interesadas el desarrollo y objetivos del mismo.
En el último trimestre de 2009 la empresa Magtel Renovables se interesó en el diseño demotor Stirling de ENGLOBE TECHNOLOGIES mostrando su apoyar la construccióndel motor una vez finalizados los trabajos de ingeniería. Magtel Renovables cuenta convarios campos solares de energía fotovoltaica en distintas ubicaciones de Andalucía per-teneciendo asimismo a la Asociación Española de la Industria Termosolar.
En el proyecto de desarrollo se distinguen 2 fases diferenciadas:
Una primera etapa para la construcción y monitorización de un prototipo del mo-tor de ciclo de aire de ENGLOBE TECHNOLOGIES en su configuración solar.Esta fase permitirá certificar las predicciones de rendimiento del conjunto así comoaportar información necesaria para optimizar el diseño y características del sistemacon vistas a la fabricación y explotación en serie del mismo. Esta primera fase tieneun tiempo estimado de ejecución de 2 años.
Una segunda etapa dedicada a la fabricación y explotación comercial de los sis-temas. En la MEMORIA TÉCNICA aparece una propuesta relativa a una plantade generación distribuida de 50MW basada en los sistemas Stirling de ENGLOBETECHNOLOGIES. Tal y como queda recogido en la MEMORIA TÉCNICA, laestimación de vida operativa de los sistemas es de 25 años por lo que ésa habráde ser la duración de esta fase que en paralelo habría de ir acompañada de nuevaspromociones.
• La ubicación del prototipo de Stirling se localizará en los terrenos de la plan-ta solar La Castillaneja en La Carlota (Córdoba) donde Magtel Renovables
379

380
cuenta con una explotación de 60.000 placas solares y una potencia instaladade 9.8 Mw. La ubicación seleccionada para el montaje y monitorización delproyecto de motor Stirling desarrollado por Englobe Technologies se localizaen Córdoba.

Apéndice A
Análisis del funcionamiento de unmotor de ciclo de aire
A.1. Introducción
Diseñar un motor es una tarea complicada. Un motor térmico, independientemente desu principio de funcionamiento, es una compleja obra de Ingeniería de gran complejidad,en muchos casos puramente multidisciplinar.
La parte esencial de la fase del diseño conceptual es reducir con la mayor precisiónposible el funcionamiento del motor a una serie de modelos simples capaces de reproducirfielmente el punto de diseño. Si estos modelos fracasan nunca se podrá acceder a la fasede diseño preliminar y mucho menos a la fase de diseño detallado.
Si bien el tiempo necesario para describir las ecuaciones del modelo simplificado esmucho menor que los análisis en detalle, el análisis conceptual debe realizarse concienzu-damente para introducir en el modelo la mayor cantidad de elementos de diseño que elmotor pueda tener en el futuro.
La primera fase de este modelo es despiezar el concepto de motor y analizar cada unade sus porciones independientemente describiendo su funcionamiento mediante modelosmatemáticos sencillos. Las piezas se unirán en mecanismos y reaccionarán de una deter-minada manera ante el proceso térmico proporcionando ecuaciones de movimiento y decomportamiento térmico.
La precisión de las ecuaciones durante la descripción básica de las característicastérmicas y fluidodinámicas de las piezas del motor es muy baja. Podremos encontrarnoscon errores de hasta el 15% respecto a los observados posteriormente pero debemosenfatizar que la precisión no es un objetivo de este proceso.
Este informe tiene dos partes diferenciadas. En la primera se propone el método dela superfície φνT para el modelo de motor y en la segunda se aplica al caso del motorcon regeneración ideal. Dicho ejemplo de aplicación utiliza la librería de análisis queimplementa el método y hace a su vez de manual de instrucciones.
381

382 A.1. INTRODUCCIÓN
A.1.1. El motor de ciclo de aire.
Los motores térmicos se dividen en dos grandes famílias, los motores de combustióninterna y los motores de ciclo de aire. Los primeros se caracterizan por aprovechar laliberación de calor durante un proceso exotérmico como la oxidación de un combustiblepara aumentar la presión del fluido de trabajo. Los segundos calientan y enfrían unfluido de trabajo por convección forzada sin que dicho fluido experimente ningún cambioquímico.
Las gran ventaja del motor de combustión interna respecto al de ciclo de aire es lamejor relación peso potencia y puede utilizarse en vehículos mientras que el motor deciclo de aire suele tener mejor rendimiento.
Durante el siglo XX, antes de la preocupación medioambiental y la escasez de com-bustibles fósiles no había ningún motivo puramente económico para desarrollar motoresde ciclo de aire pero los efectos del cambio climático y el aumento del precio del petróleolos han vuelto a la actualidad.
A diferencia de los motores de combustión interna, los motores de ciclo de aire presen-tan tipologías muy diversas. Además cada tipología suele imponer un método de análisisincompatible con otras. Hay en la literatura especializada muy pocos intentos para pro-poner métodos de análisis universales capaces de describir de un modo aproximado elfuncionamiento de cualquier motor de ciclo de aire ya sea de tipo α, β, de pistón libre...
Figura A.1: Tipologías clásicas de motores Stirling
La realización del ciclo de aire obliga como mínimo a disponer de dos cilindros yde un regenerador. Uno de los cilindros es el encargado de obtener el trabajo de unproceso de expansión, el segundo comprime el fluido de trabajo y el regenerador seencarga de los procesos de transferencia de calor. Estas piezas fundamentales son lasúnicas necesarias para modelar cualquier motor de ciclo de aire y cualquier añadidorepresenta una corrección a ese modelo fundamental.

APÉNDICE A. ANÁLISIS DEL FUNCIONAMIENTO DE UN MOTOR DE CICLODE AIRE 383
A.2. Análisis del ciclo Stirling
En este capítulo analizaremos los conceptos más básicos del ciclo Stirling necesariospara modelar los componentes con precisión. La definición puramente termodinámica deun ciclo Stirling es la zona del diagrama pv que queda encerrada por compresión y expan-sión a temperatura constante y un calentamiento y enfriamiento a volúmen constante.
Volúmen total
Pre
sió
n to
tal
1
2
3
4
Figura A.2: Diagrama pv del ciclo Stirling ideal
La principal particularidad del ciclo Stirling es que, desde un punto de vista teórico, esel proceso térmico de mayor rendimiento que es mecánicamente realizable. Su rendimientoes equivalente al rendimiento de Carnot.
El ciclo ideal dentro de un motor Stirling sólo se parece remotamente al ciclo ideal.Las diferencias más importantes se deben a lo siguiente
Para realizar un ciclo Stirling es imposible eliminar los volúmenes muertos. Conellos los procesos a volúmen constante nunca serán tales.
La regeneración que sucede durante los procesos a volumen constante nunca esperfecta y en ella se pierde carga de presión.
La realización mecánica real nunca es capaz de reproducir la variación de volúmennecesaria para el ciclo ideal. Un mecanismo que lo consiguiera tendría aceleracionesinfinitas.
Generador Solar de Ciclo de Aire
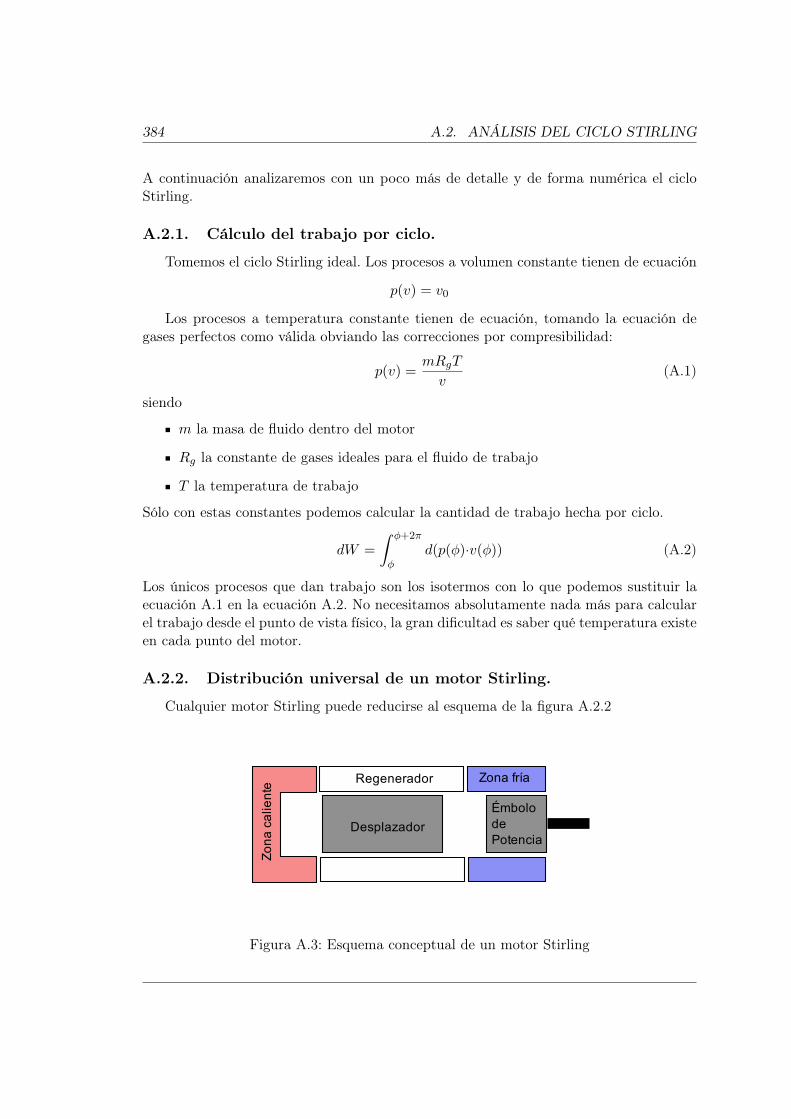
384 A.2. ANÁLISIS DEL CICLO STIRLING
A continuación analizaremos con un poco más de detalle y de forma numérica el cicloStirling.
A.2.1. Cálculo del trabajo por ciclo.
Tomemos el ciclo Stirling ideal. Los procesos a volumen constante tienen de ecuación
p(v) = v0
Los procesos a temperatura constante tienen de ecuación, tomando la ecuación degases perfectos como válida obviando las correcciones por compresibilidad:
p(v) =mRgT
v(A.1)
siendo
m la masa de fluido dentro del motor
Rg la constante de gases ideales para el fluido de trabajo
T la temperatura de trabajo
Sólo con estas constantes podemos calcular la cantidad de trabajo hecha por ciclo.
dW =∫ φ+2π
φd(p(φ)·v(φ)) (A.2)
Los únicos procesos que dan trabajo son los isotermos con lo que podemos sustituir laecuación A.1 en la ecuación A.2. No necesitamos absolutamente nada más para calcularel trabajo desde el punto de vista físico, la gran dificultad es saber qué temperatura existeen cada punto del motor.
A.2.2. Distribución universal de un motor Stirling.
Cualquier motor Stirling puede reducirse al esquema de la figura A.2.2
Zo
na
ca
lien
te
Desplazador
ÉmbolodePotencia
Regenerador Zona fría
Figura A.3: Esquema conceptual de un motor Stirling
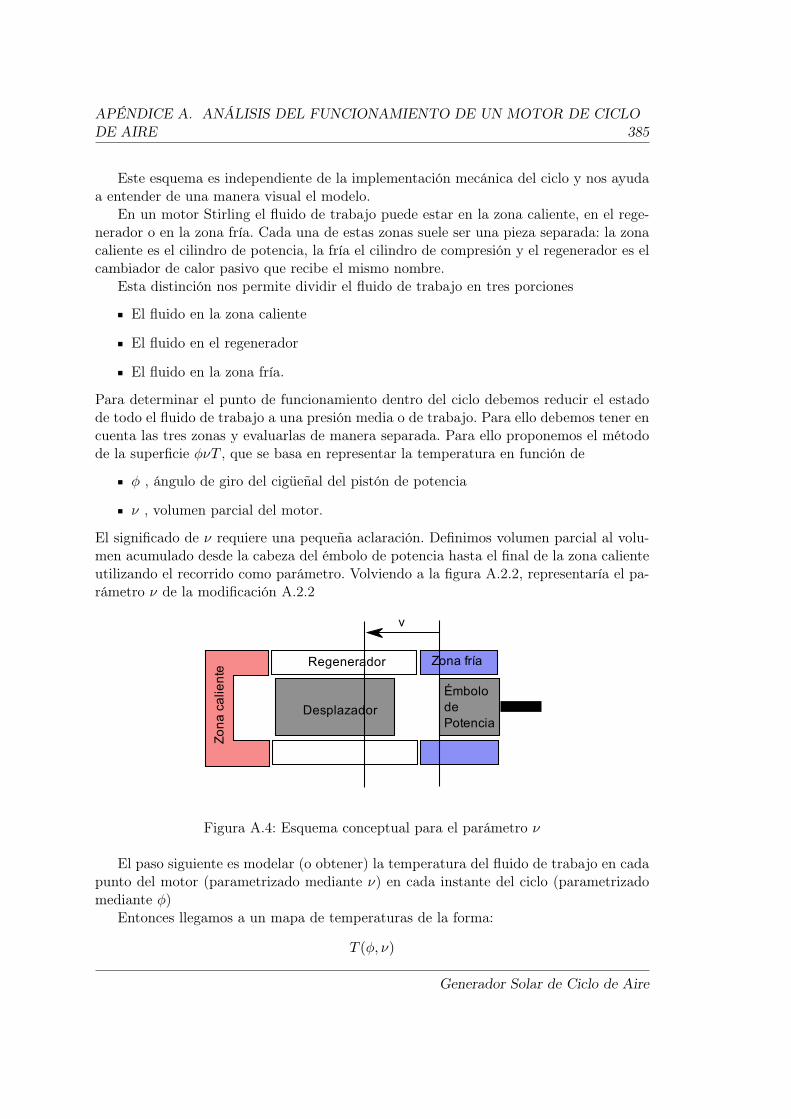
APÉNDICE A. ANÁLISIS DEL FUNCIONAMIENTO DE UN MOTOR DE CICLODE AIRE 385
Este esquema es independiente de la implementación mecánica del ciclo y nos ayudaa entender de una manera visual el modelo.
En un motor Stirling el fluido de trabajo puede estar en la zona caliente, en el rege-nerador o en la zona fría. Cada una de estas zonas suele ser una pieza separada: la zonacaliente es el cilindro de potencia, la fría el cilindro de compresión y el regenerador es elcambiador de calor pasivo que recibe el mismo nombre.
Esta distinción nos permite dividir el fluido de trabajo en tres porciones
El fluido en la zona caliente
El fluido en el regenerador
El fluido en la zona fría.
Para determinar el punto de funcionamiento dentro del ciclo debemos reducir el estadode todo el fluido de trabajo a una presión media o de trabajo. Para ello debemos tener encuenta las tres zonas y evaluarlas de manera separada. Para ello proponemos el métodode la superficie φνT , que se basa en representar la temperatura en función de
φ , ángulo de giro del cigüeñal del pistón de potencia
ν , volumen parcial del motor.
El significado de ν requiere una pequeña aclaración. Definimos volumen parcial al volu-men acumulado desde la cabeza del émbolo de potencia hasta el final de la zona calienteutilizando el recorrido como parámetro. Volviendo a la figura A.2.2, representaría el pa-rámetro ν de la modificación A.2.2
Zo
na
ca
lie
nte
Desplazador
ÉmbolodePotencia
Regenerador Zona fría
ν
Figura A.4: Esquema conceptual para el parámetro ν
El paso siguiente es modelar (o obtener) la temperatura del fluido de trabajo en cadapunto del motor (parametrizado mediante ν) en cada instante del ciclo (parametrizadomediante φ)
Entonces llegamos a un mapa de temperaturas de la forma:
T (φ, ν)
Generador Solar de Ciclo de Aire

386 A.3. APLICACIÓN A UN MOTOR DE CICLO SHMIDT .
Este mapa es la clave para el análisis de los motores de ciclo de aire porque permiteconocer, mediante este único resultado, todas las características de su funcionamiento.Obviamente el parámetro ν no es suficiente para describir todos los gradientes de tem-peratura presentes en el motor, normalmente de gran complejidad geométrica y térmica,pero sí nos servira para concer el punto de funcionamiento en cada instante y para de-terminar sus actuaciones.
Calcularemos entonces la temperatura promedio
〈T 〉ν(φ) =∫ 1
0T (φ, ν)dν (A.3)
El paso siguiente es utilizar la ecuación de estado de los gases perfectos1 A.1 paracalcular la presión
〈p〉(φ) =mRg〈T 〉(φ)
v(φ)(A.4)
Con ello podemos calcular ya el trabajo por ciclo mediante la siguiente integral delínea para el ciclo.
W =∮cic〈p〉(φ)·
dv
dφdφ
Este es el resultado esencial del análisis de cualquier motor térmico puesto que pro-porciona las coordenadas del ciclo pv. El resto de resultados como el calor necesario sonsecundarios y pueden obtenerse del diagrama pv. En realidad el resultado reduce todo elproceso a modelar una
distribución de temperaturas, algo que puede ser sencillo para un caso teórico comoterriblemente complicado para un caso real.
A.3. Aplicación a un motor de ciclo Shmidt .
De todas las implementaciones del motor de ciclo de aire la más común es la propuestapor Schmidt [WIK] en la que el cilindro de potencia y el de compresión están desfasadosun cuarto de periodo. De hecho para nuestro primer modelo utilizaremos las mismashipótesis que Schmidt
Movimiento armónico de los pistones
Temperaturas conocidas en cada punto del fluido
Sin pérdidas de fluido de trabajo
Gas perfecto1Esta hipótesis es importante porque permite realizar el promedio de temperaturas para determinar
el punto de funcionamiento. En el caso de necesitar una ecuación de estado diferente con efectos decompresibilidad será necesario utilizar una variable auxiliar distinta a la temperatura para obtener lapresión.

APÉNDICE A. ANÁLISIS DEL FUNCIONAMIENTO DE UN MOTOR DE CICLODE AIRE 387
El gas se comporta como un fluido homogéneo.
Según estas hipótesis dividimos el fluido de trabajo de la siguiente manera:
El regenerador tiene un volumen constante de valor Vr
El cilindro frío o cilindro de compresión tiene un volumen de valor Vc(φ) = Vc0 +Vc(1 + sin(φ))
El cilindro caliente o de potencia tiene un volúmen de valor Vp(φ) = Vp0 + Vp(1 +sin(φ+ β))
Están representados gráficamente en la figura A.3
0 1 2 3 4 5 6 7φ
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
V
Frío
Frío + regenerador
Frío + reg+ caliente
Figura A.5: Volúmenes acumulados para un motor Schmidt con β = π/2
A continuación vemos los volúmenes parciales en la figura A.3
Generador Solar de Ciclo de Aire

388 A.3. APLICACIÓN A UN MOTOR DE CICLO SHMIDT .
0 1 2 3 4 5 6 7φ
0.0
0.2
0.4
0.6
0.8
1.0
1.2
ν
Frío
Frío + regenerador
Frío + reg+ caliente
Figura A.6: Volúmenes parciales para un motor Schmidt con β = π/2
Es importante enfatizar que el método de análisis es válido para cualquier motorStirling, hemos tomado el ciclo Shmidt por ser un caso sencillo de aplicar. Nada nosimpide sustituir el movimiento armónico de los cilindros por un movimiento cualquiera.Obviamente la ventaja de utilizar el motor Schmidt es que podemos encontrar resultadosde su ciclo ideal en la literatura especializada.
En la regeneración perfecta, caso puramente teórico en los ciclos de aire, la efectividaddel regenerador es completa de modo que cuando el fluido de trabajo llega, bien al cilindrocaliente o al cilindro frío, ya lo hace a la temperatura de trabajo en dicho cilindro.Entonces el proceso en cada una de las zonas es puramente isotermo y los procesos detransferencia de calor actuan en consecuencia.
La regeneración perfecta permite proponer un perfil de temperaturas simple:
La temperatura de trabajo en cada cilindro es constante
La temperatura del fluido en el regenerador sigue un gradiente constante, lo quees equivalente a decir que el tiempo característico del proceso de transferencia decalor entre las paredes del regenerador y el fluido de trabajo es infinitesimal.
Podemos ver un ejemplo de mapa en la figura A.3

APÉNDICE A. ANÁLISIS DEL FUNCIONAMIENTO DE UN MOTOR DE CICLODE AIRE 389
0 1 2 3 4 5 6 7φ
0.0
0.2
0.4
0.6
0.8
1.0
ν
Figura A.7: Mapa φνT para un motor Schmidt con β = π/2, temperatura de la zonacaliente 1, temperatura de la zona fría 0 y volumen del regenerador 0.3 veces el volumende cada cilindro.
Acto seguido podemos aplicar la ecuación A.3 y la ecuación A.4 para obtener lapresión del ciclo que mostramos en la figura
0 1 2 3 4 5 6 7φ
20
40
60
80
100
120
140
160
180
Pre
sión
Figura A.8: Presión en función de la posición del émbolo de potencia
Finalmente, para demostrar que nuestro modelo es capaz de realizar un ciclo térmicorepresentamos el proceso resultante en un diagrama pv
Generador Solar de Ciclo de Aire

390 A.4. CONCLUSIONES Y DESARROLLOS FUTUROS.
1.0 1.5 2.0 2.5 3.0 3.5 4.0v
20
40
60
80
100
120
140
160
180
p
Ciclo Schmidt, Regeneración ideal
Figura A.9: Ciclo Schmidt
A.4. Conclusiones y desarrollos futuros.
Se ha propuesto un modelo sencillo para evaluar las actuaciones de un motor de ciclode aire independientemente de su implementación mecánica. Dicho método se ha ensa-yado con éxito en el motor de ciclo Schmidt con regeneración perfecta y puede aplicarsede manera análoga en cualquier caso. El único input necesario es la distribución geomé-trica de temperaturas que puede obtenerse bien por métodos analíticos o por análisisnumérico.
En el modelo se han incluido las dos necesidades de Englobe Technologies que eran:
La capacidad de tratar separadamente cada uno de los bloques del motor
La posibilidad de variar β, el ángulo de desfase.
Es por este motivo que el Laboratorio concluye que ha terminado su desarrollo de manerasatisfactoria.
Consideramos también que el modelo puede ser muy útil para explorar de modomás extenso las posibilidades del motor Stirling. Una de las posibles ampliaciones dela implementación del modelo sería acoplarle un modelo de gas real del que ya disponeel Laboratorio llamado thermopy, que sería capaz de realizar los mismos cálculos concualquier gas y sobre un gran abanico de temperaturas y presiones de funcionamiento.
.1. Código Fuente.

APÉNDICE A. ANÁLISIS DEL FUNCIONAMIENTO DE UN MOTOR DE CICLODE AIRE 391
# -*- coding: utf -8 -*-
from math import pifrom numpy import sin , ones , array , empty , meanfrom scipy import integrate
class Regenerator(object ):def __init__(self ,V=1):
self.V = V
def p(self ,x):pass
class Cold(object ):def __init__(self ,V0=0.1,V=1):
self.V0 = V0self.V = V
def volume(self ,phi):return self.V0 + self.V*(1+ sin(phi))
#Only for debuggingdef plot_volume(self):
phi = linspace (0,2*pi ,100)self.p = plot(phi ,self.volume(phi))
class Hot(object ):def __init__(self ,V0=0.1,V=1,beta=pi/2):
self.V0 = V0self.V = Vself.beta = beta
def volume(self ,phi):return self.V0 + self.V*(1+ sin(phi + self.beta))
#Only for debuggingdef plot_volume(self):
phi = linspace (0,2*pi ,100)self.p = plot(phi ,self.volume(phi))
def T_lin(nu,T1,T2 ,zone):#Mandatory conversion in case nu is not an arraynu = array(nu)(cld ,reg ,hot) = zonecldregion = (nu < cld*ones(nu.size )). astype(int)regregion = (nu >= cld*ones(nu.size )). astype(int) * (
Generador Solar de Ciclo de Aire

392 .1. CÓDIGO FUENTE.
nu < reg*ones(nu.size )). astype(int)hotregion = (nu >= reg*ones(nu.size )). astype(int)
pre = empty(nu.size)
pre[cldregion.nonzero ()] = T1pre[hotregion.nonzero ()] = T2pre[regregion.nonzero ()] = linspace(T1 ,T2 ,regregion.nonzero ()[0]. size)
return pre
class Schmidt(object ):def __init__(self ,cold ,hot ,regenerator ):
self.cold = coldself.hot = hotself.regenerator = regenerator# TODO: THERMOPY SUPPORTself.Rg = 288self.m = 1
def volume(self ,phi):return self.cold.volume(phi) + self.hot.volume(phi) + \
self.regenerator.V
def nu(self ,phi):return (
self.cold.volume(phi)/self.volume(phi),(self.regenerator.V+self.cold.volume(phi ))/ self.volume(phi),
(self.hot.volume(phi)+self.regenerator.V+self.cold.volume(phi ))/ self.volume(phi)
)
def T_ideal_regen(self ,phi ,Tcold=0,Thot =1):(cld ,reg ,hot) = self.nu(phi)return lambda nu: T_lin(nu,Tcold ,Thot ,(cld ,reg ,hot))
def Tm_ideal_regen(self ,phi ,Tcold=0,Thot =1):sampling = 100Temp = empty(phi.size)for i in range(phi.size):
Tphi = self.T_ideal_regen(phi[i],Tcold ,Thot)Temp[i] = Tphi(linspace (0,1, sampling )). mean()
return Temp
def p_mean(self ,phi ,Tcold=0,Thot =1):

APÉNDICE A. ANÁLISIS DEL FUNCIONAMIENTO DE UN MOTOR DE CICLODE AIRE 393
return self.m*self.Rg*self.Tm_ideal_regen(phi ,Tcold ,Thot)/self.volume(phi)
if __name__ == ’__main__ ’:from pylab import plot , show , hold , figure , xlabel , ylabel , setp , \
meshgrid , contour , pcolor , cm , savefig , legend , clf , titlefrom numpy import linspace , pi , ones , zeros
cld = Cold()htt = Hot()reg = Regenerator (0.3)
sch = Schmidt(cld ,htt ,reg)phi = linspace (0,2*pi ,100)hold(’on’)vol = sch.volume(phi)(cold ,regenerator ,hot) = sch.nu(phi)figure (1)clf()plot(phi ,cold)plot(phi ,regenerator)plot(phi ,hot)xl = xlabel(r’$\phi$’)setp(xl, ’fontsize ’, 16)yl = ylabel(r’$\nu$’)setp(yl, ’fontsize ’, 16)legend ((u’ F r o ’,u’ F r o ␣+␣regenerador ’,u’ F r o ␣+␣reg+␣caliente ’))savefig(’nus.pdf’)
figure (2)clf()plot(phi ,cold*vol)plot(phi ,regenerator*vol)plot(phi ,hot*vol)xl = xlabel(r’$\phi$’)setp(xl, ’fontsize ’, 16)yl = ylabel(r’V’)setp(yl, ’fontsize ’, 16)legend ((u’ F r o ’,u’ F r o ␣+␣regenerador ’,u’ F r o ␣+␣reg+␣caliente ’))savefig(’vols.pdf’)
figure (3)clf()cont = zeros ((100 ,100))xx = linspace (0,1,100)for (ph,i) in zip(linspace (0,2*pi ,100) , range (100)):
fun = sch.T_ideal_regen(ph)cont[:,i] = fun(xx)
Generador Solar de Ciclo de Aire

394 .1. CÓDIGO FUENTE.
contour(linspace (0,2*pi ,100),linspace (0,1,100),cont ,cmap=cm.hot)
xl = xlabel(r’$\phi$’)setp(xl, ’fontsize ’, 16)yl = ylabel(r’$\nu$’)setp(yl, ’fontsize ’, 16)savefig(’map.pdf’)
figure (4)clf()ph = linspace (0,2*pi ,100)plot(ph,sch.p_mean(ph))xl = xlabel(r’$\phi$’)setp(xl, ’fontsize ’, 16)yl = ylabel(u’ P r e s i n ’)setp(yl, ’fontsize ’, 16)savefig(’presion.pdf’)
figure (5)clf()plot(sch.volume(phi),sch.p_mean(ph))t = title(u’Ciclo␣Schmidt ,␣ R e g e n e r a c i n ␣ideal’)setp(t, ’fontsize ’, 16)xl = xlabel(’v’)setp(xl, ’fontsize ’, 16)yl = ylabel(’p’)setp(yl, ’fontsize ’, 16)savefig(’cycle.pdf’)
#show()

Apéndice A
Programas desarrollados para elcapítulo 9.4
En este capítulo se obtuvo la ecuación diferencial del movimiento del mecanismo.Para ello se utilizo un programa escrito en el lenguaje Python que apoyandose en unalibreria denominada PyDy proporciona las ecuaciones del movimiento.
Fichero motor2.py
# coding=u t f 8
import sympy#from sympy import ∗from pydy import ∗
# Create a Newtonian r e f e r ence frameN = NewtonianReferenceFrame ( ’N ’ )
Inert ia_parametersn = ’ Ixc ␣ Iyc ␣ I z c ␣Jxyc␣Jxzc␣Jyzc␣ Ixd␣ Iyd␣ Izd ␣\␣Jyzd␣ Ixe ␣ Iye ␣ I z e ␣ ’Mass_parametersn = ’mc␣md␣me␣ ’Geom_parametersn = ’R␣ l 4 ␣ l 6 ␣ lgd ␣ betta ␣ l 1 ␣h1␣ ’auxi l iar_paramsn = ’s_b␣c_b␣ ’Forcesn = ’Fe1␣Fe2␣Fzc␣Fxc ’
paramsn = Inert ia_parametersn + Mass_parametersn + Geom_parametersn \+ auxi l iar_paramsn + Forcesnparams = N. dec lare_parameters ( paramsn )
( Ixc , Iyc , Izc , Jxyc , Jxzc , Jyzc , Ixd , Iyd , Izd , Jyzd , Ixe , Iye , I z e ) \= params [ 0 : 1 3 ](mc , md, me) = params [ 1 3 : 1 6 ]
395

396
(R, l4 , l6 , lgd , betta , l1 , h1 ) = params [ 1 6 : 2 3 ]( s_b , c_b) = params [ 2 3 : 2 5 ](Fe1 , Fe2 , Fzc , Fxc ) = params [ 2 5 : 2 9 ]
q , qd = N. dec lare_coords ( ’ q ’ , 1)u , ud = N. dec lare_speeds ( ’u ’ , 1)
# Orient the t h r e e r i g i d bodies , a s s i gn i n e r t i a s#Definimos e l s o l i d o c i guena lC = N. ro t a t e ( "C" , 2 , q [ 0 ] , I=(Ixc , Iyc , Izc , Jxyc , Jyzc , Jxzc ) )#Definimos un s i s tema de r e f e r en c i a a u x i l i a r en e l#c i guena l cor re spond i en t e a l brazo g i radoCaux = N. ro t a t e ( "Caux" , 2 , q [0 ]+ betta )#Definimos e l s o l i d o d i s co 1D1 = N. ro t a t e ( ’D1 ’ , 2 , −q [ 0 ] , I=(Ixd , Iyd , Izd , 0 , Jyzd , 0 ) )#Definimos e l s o l i d o d i s co 2D2aux = N. r o t a t e ( ’D2aux ’ , 3 , sympy . p i )D2 = D2aux . r o t a t e ( ’D2 ’ , 2 , q [0 ]+ betta , \I=(Ixd , Iyd , Izd , 0 , Jyzd , 0 ) )
#Definimos l o s s o l i d o s embolo#E1 = ReferenceFrame ( ’E1 ’)#E1 . i n e r t i a = In e r t i a (E1 , ( Ixe , Iye , Ize , 0 , 0 , 0))#E2 = N. r o t a t e ( ’E2 ’ , 2 , pi , I=(Ixe , Iye , Ize , 0 , 0 , 0))
#l o c a t e mass c en t e r s and as s i gn massesCG = N.O. l o c a t e ( ’CG’ , 0 , C, mc , f o r c e = Fzc∗N[ 3 ] )D1G = N.O. l o c a t e ( ’D1G ’ , (− l 6 /2− l 4+lgd )∗C[ 2 ] + (R/2)∗C[ 3 ] , D1 , md)D2G = N.O. l o c a t e ( ’D1G ’ , ( l 6 /2+l4−lgd )∗Caux [ 2 ] \+ (R/2)∗Caux [ 3 ] , D2 , md)
#lo c a t e the po in t s P and P2P = D1G. l o c a t e ( ’P ’ , −lgd ∗D1 [ 2 ] + (R/2)∗D1 [ 3 ] , D1)P2 = D2G. l o c a t e ( ’P2 ’ , −lgd ∗D2 [ 2 ] + (R/2)∗D2 [ 3 ] , D2)
#lo c a t e the p i s t on s ’ mass c en t e r sE1G = P. l o c a t e ( ’E1G ’ ,− l 1 ∗N[2]+h1∗N[ 3 ] , mass=me, f o r c e=−Fe1∗N[ 3 ] )E2G = P2 . l o c a t e ( ’E2G ’ , l 1 ∗N[2]+h1∗N[ 3 ] , mass=me, f o r c e=−Fe2∗N[ 3 ] )
## Define g en e r a l i z e d speedsu_defs = N. def ine_speeds ( [ Eq(u [ 0 ] , dot (C. ang_vel ( ) , C [ 2 ] ) ) ] )print u_defs
APÉNDICE A. PROGRAMAS DESARROLLADOS PARA EL CAPÍTULO ?? 397
## Set v e l o c i t i e s and angu lar v e l o c i t i e sC. abs_ang_vel = Vector (u [ 0 ] ∗C[ 2 ] )D1 . abs_ang_vel = Vector(−u [ 0 ] ∗D1 [ 2 ] )D2 . abs_ang_vel = Vector (u [ 0 ] ∗D2 [ 2 ] )CG. abs_vel = Vector (0 )D1G. abs_vel = Vector (R/2∗u [ 0 ] ∗C[ 1 ] )D2G. abs_vel = Vector (R/2∗u [ 0 ] ∗Caux [ 1 ] )P. abs_vel = Vector(−R∗u [ 0 ] ∗ s i n ( q [ 0 ] ) ∗N[ 3 ] )P2 . abs_vel = Vector(−R∗u [ 0 ] ∗ ( s i n ( q [ 0 ] ) ∗ c_b+cos (q [ 0 ] ) ∗ s_b)∗N[ 3 ] )E1G. abs_vel = P. abs_velE2G. abs_vel = P2 . abs_vel
#C. abs_ang_vel = C. ang_vel ( )#D1. abs_ang_vel = D1. ang_vel ( )#D2. abs_ang_vel = D2. ang_vel ( )#CG. abs_vel = CG. v e l ( )#D1G. abs_vel = D1G. v e l ( )#D2G. abs_vel = D2G. v e l ( )#P. abs_vel = P. v e l ( )#P2 . abs_vel= P2 . v e l ( )
## Set a c c e l e r a t i o n s and angu lar a c c e l e r a t i o n sC. abs_ang_acc = dt (C. abs_ang_vel , N)D1 . abs_ang_acc = dt (D1 . abs_ang_vel , N)D2 . abs_ang_acc = dt (D2 . abs_ang_vel , N)CG. abs_acc = dt (CG. abs_vel , N)D1G. abs_acc = dt (D1G. abs_vel , N)D2G. abs_acc = dt (D2G. abs_vel , N)P. abs_acc = dt (P. abs_vel , N)P2 . abs_acc = dt (P2 . abs_vel , N)E1G. abs_acc = P. abs_accE2G. abs_acc = P2 . abs_acc
kanes_eqns = N. form_kanes_equations ( )#kanes_eqns = kanes_eqns [ 0 ] . subs ({ qd [ 0 ] : u [ 0 ] } )print kanes_eqns
Generador Solar de Ciclo de Aire

398

Apéndice B
Programas desarrollados para elcapitulo 11
A lo largo del capítulo se han realizado multitud de cálculos y se han obtenido unagran cantidad de gráficas para ilustrar los resultados obtenidos. Todos ello ha sido reali-zado con la ayuda del programa de cálculo científico Matlab®. Se detalla a continuacióntodo el código empleado para la realización de dichos cálculos y la obtención de lasgráficas.
B.1. Programa desarrollado para la determinación del mo-vimiento libre(Sección 11.2)
Fichero edo_theta_C_libre.m
function dy=edo_theta_C_libre ( t , y ,m_E,R, I , betta )dy=zeros ( 2 , 1 ) ;dy(1)=y ( 2 ) ;dy(2)=−y (2 )∗ (m_E∗R^2/2∗( sin (2∗y(1)+ sin (2∗y(1)+2∗ betta ) ) ) ) / . . .
( I+m_E∗R^2∗(( sin ( y (1)))^2+( sin ( y(1)+ betta ) ) ^ 2 ) ) ;
Fichero det_mov.m
clear
m_E=2;R=0.1;I=1e−5;betta=pi /2 ;n=3000; %rpmw=n∗2∗pi /60 ;per iod=2∗pi/w;i =0;
399

400B.2. PROGRAMA DESARROLLADO PARA LA OPTIMIZACIÓN DE LA
POTENCIA (SECCIÓN ??)
for I=1e−7:1e−7:1e−4i=i+1equat ion= @( t , y ) edo_theta_C_libre ( t , y ,m_E,R, I , betta ) ;[T,Y] = ode45 ( equation , [ 0 per iod ] , [ 0 w ] ) ;x ( i )=I ;o s c i l a c i o n ( i )=max(Y( : ,2) ) −min(Y( : , 2 ) ) ;f igure (1 )plot (Y( : , 1 )∗180/ pi ,Y( : , 2 )∗60/ ( 2∗ pi ) )hold a l l
endfigure (2 )plot (x , o s c i l a c i o n )
B.2. Programa desarrollado para la optimización de la po-tencia (Sección 11.3)
Este programa consta de varios subprogramas almacenados en distintos ficheros. Enlos primeros parametros.m y parametros_geomas.m se definen los parámetros geométri-cos y termodinámicos necesarios para los cálculos. Con ellos los ficheros param_geom.m ydet_m_vres.m determinan el resto de parámetros necesarios. Es entonces cuando el pro-grama principal contenido en el fichero optim_pot.m procede a la optimización calculan-do el par y la potencia para distintos valores de dichos parámetros. Para ello utiliza variossubprogramas como los contenidos en los ficheros stirling_ideal.m, stirling_isotermo.my par_w_cte.m que determinan las presiones en los émbolos para cada ciclo y el par.
Fichero parametros.m
Rg=4124.2;gama = 1 . 4 ;ctes_termo=[Rg , gama ] ;
pmax=32e5 ;pmin=8e5 ;Tmax=850;Tmin=400;Tr=(Tmax−Tmin)/ log (Tmax/Tmin ) ;param_ciclo = [Tmin ,Tmax, pmin , pmax ] ;
parametros_geomas ;[A1 ,A1_]=param_geom( Ci l indrada , re l_areas ,R) ;p roporc i one s = [ 0 . 2 , 0 . 6 , 0 . 2 ] ;

APÉNDICE B. PROGRAMAS DESARROLLADOS PARA EL CAPITULO ?? 401
rpm=3000;w=rpm∗2∗pi /60 ;per iod=2∗pi/w;dwdt=0. ;
Fichero parametros_geomas.m
betta = pi /2 ;R = . 1 ;
l_6 = 0 . 1 2 5 ;l_4 = 0 . 0 5 ;l_gD = 0 . 0 0 8 ;l_gE = 0 . 0 7 ;
JyzC = 0 . ;IyC = 1e−6;JxyC = 0 . ;JyzD = 0 . ;IyD = 1e−6;
m_E=0.7;m_E2=0.7;m_D=1.2;
param_geomas = [ betta , R , l_6 , l_4 , l_gD , l_gE , JyzC , . . .IyC , JxyC , JyzD , IyD , m_E, m_E2, m_D] ;
C i l indrada = 1000e−6;r e l_areas =1.6 ;
Fichero param_geom.m
function [A1 ,A1_]=param_geom( Ci l indrada , re l_areas ,R)A1=Ci l indrada /(2∗R∗(1+ re l_areas ) ) ;A1_=re l_areas ∗A1 ;
Fichero det_m_vres.m
%Determinamos l a masa de a i r e y e l volumen r e s i d u a l para ob tener l a s%pre s i one s y temperaturas r e que r i da sfunction [m, Vres ]=det_m_vres (A1 ,A1_,R, betta , param_ciclo , ctes_termo )
Tmin = param_ciclo ( 1 ) ;Tmax = param_ciclo ( 2 ) ;pmin = param_ciclo ( 3 ) ;
Generador Solar de Ciclo de Aire

402B.2. PROGRAMA DESARROLLADO PARA LA OPTIMIZACIÓN DE LA
POTENCIA (SECCIÓN ??)
pmax = param_ciclo ( 4 ) ;Rg = ctes_termo ( 1 ) ;gama = ctes_termo ( 2 ) ;m=sym( ’m’ ) ;Vres=sym( ’ Vres ’ ) ;r e l_areas=A1_/A1 ;s o l = −atan ( r e l_areas ∗ sin ( betta )/(1+ re l_areas ∗cos ( betta ) ) ) ;V1pi=A1∗R∗(1−cos (pi+so l ) ) ;V1_pi=A1_∗R∗(1−cos (pi+so l+betta ) ) ;V12pi=A1∗R∗(1−cos (2∗pi+so l ) ) ;V1_2pi=A1_∗R∗(1−cos (2∗pi+so l+betta ) ) ;i f ( ( V1pi+V1_pi)>(V12pi+V1_2pi ) )
So l=so l v e ( ’ ( Vres+R∗(A1+A1_−A1∗ cos ( p i+s o l ) ␣ . . .␣␣␣␣␣␣␣␣−A1_∗ cos ( p i+s o l+betta ) ) )∗ pmin−m∗Rg∗Tmin ’ , ’ ␣ . . .␣␣␣␣␣␣␣␣ ( Vres+R∗(A1+A1_−A1∗ cos (2∗ pi+s o l ) ␣ . . .␣␣␣␣␣␣␣␣−A1_∗ cos (2∗ pi+s o l+betta ) ) )∗pmax−m∗Rg∗Tmax ’ ,m, Vres ) ;
e l s e i f ( ( V1pi+V1_pi)<(V12pi+V1_2pi ) )So l=so l v e ( ’ ( Vres+R∗(A1+A1_−A1∗ cos ( p i+s o l ) ␣ . . .
␣␣␣␣␣␣␣␣−A1_∗ cos ( p i+s o l+betta ) ) )∗pmax−m∗Rg∗Tmax ’ , ’ ␣ . . .␣␣␣␣␣␣␣␣ ( Vres+R∗(A1+A1_−A1∗ cos (2∗ pi+s o l ) ␣ . . .␣␣␣␣␣␣␣␣−A1_∗ cos (2∗ pi+s o l+betta ) ) )∗ pmin−m∗Rg∗Tmin ’ ,m, Vres ) ;
elsem=0. ;Vres =0. ;
endm=subs ( So l .m) ;Vres=subs ( So l . Vres ) ;
Fichero optim_pot.m
clearparametros ;for betta=90∗pi /180:2∗ pi /180:106∗ pi /180
j =0;[A1 ,A1_] = param_geom( Ci l indrada , re l_areas ,R) ;[m, Vres ] = det_m_vres_iso (A1 ,A1_,R, betta , param_ciclo , . . .
ctes_termo , proporc iones , Tr ) ;for rpm=3000:100:3000
w=rpm∗2∗pi /60 ;per iod=2∗pi/w;[A1 ,A1_] = param_geom( Ci l indrada , re l_areas ,R) ;[m, Vres ] = det_m_vres_iso (A1 ,A1_,R, betta , param_ciclo , . . .
ctes_termo , proporc iones , Tr ) ;j=j+1

APÉNDICE B. PROGRAMAS DESARROLLADOS PARA EL CAPITULO ?? 403
r e l a c i o n e s ( j )=rpm ;
teta_C=0:0 .001 :2∗ pi ;
p =@( teta_C ) s t i r l i n g_ i d e a l ( teta_C ,m, Vres ,A1 ,A1_,R, betta , . . .param_ciclo , ctes_termo ) ;
T_ideal = par_w_cte ( teta_C ,w, p , p ,m,m_E, Vres ,A1 ,A1_,R, . . .betta , param_ciclo , ctes_termo ) ;
[ p1 ,V] = s t i r l i n g_ i d e a l ( teta_C ,m, Vres ,A1 ,A1_,R, betta , . . .param_ciclo , ctes_termo ) ;
p =@( teta_C ) s t i r l i n g_ i s o t e rmo ( teta_C ,m, Vres ,A1 ,A1_,R, . . .betta , param_ciclo , ctes_termo , . . .proporc iones , Tr ) ;
T_iso = par_w_cte ( teta_C ,w, p , p ,m,m_E, Vres ,A1 ,A1_,R, betta , . . .param_ciclo , ctes_termo ) ;
[ p1 ,V] = s t i r l i n g_ i s o t e rmo ( teta_C ,m, Vres ,A1 ,A1_,R, betta , . . .param_ciclo , ctes_termo , . . .proporc iones , Tr ) ;
va l i do=(Vres>0 & m>0);
t raba jo_iso=trapz ( teta_C , T_iso )∗ va l i do ;pot_media_iso ( j )=traba jo_iso / per iod ;t raba jo_idea l=trapz ( teta_C , T_ideal ) ;pot_media_ideal ( j )=t raba jo_idea l / per iod ;
w_cic lo_ideal ( j )=m∗Rg∗ log (max(V)/min(V) )∗ (Tmax−Tmin ) ;pot_c ic lo_idea l ( j )=w_cic lo_ideal ( j )/ per iod ;w_ciclo_iso ( j )=trapz (V, p1 ) ;pot_c ic lo_iso ( j )=w_ciclo_iso ( j )/ per iod ;
rend_iso_ideal ( j )=pot_media_iso ( j )/ pot_c ic lo_idea l ( j ) ;rend_iso_iso ( j )=pot_media_iso ( j )/ pot_cic lo_iso ( j ) ;rend_idea l_idea l ( j )=pot_media_ideal ( j )/ pot_c ic lo_idea l ( j ) ;
masas ( j )=m;volumenes_res ( j )=Vres ;
endfigure (5 )plot ( r e l a c i o n e s , masas )hold a l lplot ( r e l a c i o n e s , volumenes_res ∗1 e6 )hold a l l
Generador Solar de Ciclo de Aire
404B.2. PROGRAMA DESARROLLADO PARA LA OPTIMIZACIÓN DE LA
POTENCIA (SECCIÓN ??)
grid onf igure (1 )plot ( r e l a c i o n e s , pot_media_iso∗1e−3)hold a l lplot ( r e l a c i o n e s , pot_media_ideal∗1e−3)hold a l lplot ( r e l a c i o n e s , pot_c ic lo_iso )hold a l lplot ( r e l a c i o n e s , pot_c ic lo_idea l )hold a l llegend ( ’ Potenc ia ␣ de l ␣motor␣con␣ c i c l o ␣ i s o t e rm i co ’ , . . .
’ Potencia ␣ de l ␣motor␣con␣ c i c l o ␣ i d e a l ’ , . . .’ Potencia ␣ t e r i c a ␣ de l ␣ c i c l o ␣ i s o t e rm i co ’ , . . .’ Potencia ␣ t e r i c a ␣ de l ␣ c i c l o ␣ i d e a l ’ )
f igure (2 )plot ( r e l a c i o n e s , rend_iso_iso )hold a l lplot ( r e l a c i o n e s , rend_iso_ideal )hold a l lplot ( r e l a c i o n e s , rend_idea l_idea l )legend ( ’ Rendimiento␣ de l ␣motor␣con␣ c i c l o ␣ i s o t e rm i co ’ , . . .’ Rendimiento␣ de l ␣motor␣con␣ c i c l o ␣ i d e a l ’ )
end
Fichero stirling_ideal.m
function [ p ,V]= s t i r l i n g_ i d e a l ( teta_C ,m, Vres ,A1 ,A1_, . . .R, betta , param_ciclo , ctes_termo )
Tmin = param_ciclo ( 1 ) ;Tmax = param_ciclo ( 2 ) ;Rg = ctes_termo ( 1 ) ;V = Vres+R. ∗ (A1+A1_−A1.∗ cos ( teta_C)−A1_.∗ cos ( teta_C+betta ) ) ;dVdt=R∗(A1 .∗ sin ( teta_C)+A1_.∗ sin ( teta_C+betta ) ) ;compresion= dVdt<=0;expansion= dVdt>0;p=(m.∗Rg.∗Tmin . /V) . ∗ compresion+(m.∗Rg.∗Tmax. /V) . ∗ expansion ;
Fichero stirling_isotermo.m
function [ p ,V]= s t i r l i n g_ i s o t e rmo ( teta_C ,m, Vres ,A1 ,A1_,R, . . .betta , param_ciclo , ctes_termo , proporc iones , Tr )
Tmin = param_ciclo ( 1 ) ;Tmax = param_ciclo ( 2 ) ;Rg = ctes_termo ( 1 ) ;gama = ctes_termo ( 2 ) ;

APÉNDICE B. PROGRAMAS DESARROLLADOS PARA EL CAPITULO ?? 405
V1=A1.∗R.∗(1−cos ( teta_C ) ) ;V1_=A1_.∗R.∗(1−cos ( teta_C+betta ) ) ;V = Vres+V1+V1_;
% dVdt=R∗(A1∗ s in ( teta_C)+A1_∗ s in ( teta_C+be t t a ) ) ;p=m.∗Rg . / (V1 . /Tmin+proporc i one s ( 1 ) . ∗ Vres . /Tmin+ . . . .
p roporc i one s ( 2 ) . ∗ Vres . /Tr . . .+proporc i one s ( 3 ) . ∗ Vres . /Tmax+V1_./Tmax) ;
Fichero par_w_cte.m
function T=par_w_cte ( teta_C ,w, p1 , p1_ ,m,m_E, Vres ,A1 ,A1_, . . .R, betta , param_ciclo , ctes_termo )
T = R. ∗ (A1 .∗ p1 ( teta_C ) . ∗ sin ( teta_C)+ . . .A1_.∗p1_( teta_C ) . ∗ sin ( teta_C+betta ) ) . . .
−m_E.∗w^2.∗R^2 ./2 .∗ ( sin ( 2 .∗ teta_C)+ . . .sin ( 2 .∗ teta_C+2.∗ betta ) ) ;
B.3. Programa desarrollado para la optimización de las reac-ciones (Sección 11.4)
En esta sección se ha reutilizado la mayoría del código usado en la sección anterior.Solo ha sido necesario añadir el código correspondiente al sistema de ecuaciones algebraicoque determina las reacciones. Este se hace en los ficheros A_caso1.m y B_caso1.m. Todoel código de la sección anterior junto con el de estos dos ficheros es usado en el programacontenido en optim_reacc.m.
Fichero A_caso1.m
function [A]=A_caso1 ( teta_C , param_geomas )
s ize=[19 1 8 ] ;betta = param_geomas ( 1 ) ;R = param_geomas ( 2 ) ;l_6 = param_geomas ( 3 ) ;l_4 = param_geomas ( 4 ) ;l_gD = param_geomas ( 5 ) ;l_gE = param_geomas ( 6 ) ;JyzC = param_geomas ( 7 ) ;IyC = param_geomas ( 8 ) ;JxyC = param_geomas ( 9 ) ;JyzD = param_geomas ( 1 0 ) ;IyD = param_geomas ( 1 1 ) ;m_E = param_geomas ( 1 2 ) ;m_E2 = param_geomas ( 1 3 ) ;
Generador Solar de Ciclo de Aire

406B.3. PROGRAMA DESARROLLADO PARA LA OPTIMIZACIÓN DE LAS
REACCIONES (SECCIÓN ??)
m_D = param_geomas ( 1 4 ) ;
ind_F_C=[1 1 ;1 6 ;1 8 ;1 9 ;2 5 ;2 2 ;2 8 ;2 9 ] ;elem_F_C=[1 1 sin ( betta ) cos ( betta ) 1 1 cos ( betta ) −sin ( betta ) ] ;F_C=sparse (ind_F_C( : , 1 ) , ind_F_C( : , 2 ) , elem_F_C, s ize ( 1 ) , s ize ( 2 ) ) ;
ind_M_C=[3 3 ;3 7 ;3 10 ;3 5 ;3 8 ;3 9 ;4 6 ;4 9 ;5 4 ;5 10 ;5 6 ;5 9 ;5 8 ] ;elem_M_C=[1 1 sin ( betta ) −l_6/2 l_6/2∗cos ( betta ) . . .
−l_6/2∗ sin ( betta ) R/2 R/2 1 cos ( betta ) l_6/2 . . .−l_6/2∗cos ( betta ) −l_6/2∗ sin ( betta ) ] ;
M_C=sparse (ind_M_C( : , 1 ) , ind_M_C( : , 2 ) , elem_M_C, s ize ( 1 ) , s ize ( 2 ) ) ;
ind_F_D=[6 12 ;6 6 ;6 15 ;7 11 ;7 5 ;7 1 5 ] ;elem_F_D=[1 −1 sin ( teta_C ) −1 −1 −cos ( teta_C ) ] ;F_D=sparse (ind_F_D( : , 1 ) , ind_F_D( : , 2 ) , elem_F_D, s ize ( 1 ) , s ize ( 2 ) ) ;
ind_M_D=[8 7 ;8 12 ;8 16 ;8 11 ;8 5 ;8 6 ;8 15 ;9 12 ;9 15 ;10 7 ;10 16 ; . . .10 12 ;10 15 ;10 5 ;10 6 ;10 1 1 ] ;
elem_M_D=[−sin (2∗ teta_C ) l_gD∗ sin (2∗ teta_C ) −cos ( teta_C ) . . .l_gD∗cos (2∗ teta_C ) −(l_4−l_gD)∗ cos (2∗ teta_C ) . . .( l_4−l_gD)∗ sin (2∗ teta_C ) l_gD∗cos ( teta_C ) . . .
R/2 −R/2∗ sin ( teta_C ) −cos (2∗ teta_C ) . . .sin ( teta_C ) l_gD∗cos (2∗ teta_C ) −l_gD∗ sin ( teta_C ) . . .( l_4−l_gD)∗ sin (2∗ teta_C ) . . .( l_4−l_gD)∗ cos (2∗ teta_C ) −l_gD∗ sin (2∗ teta_C ) ] ;
M_D=sparse (ind_M_D( : , 1 ) , ind_M_D( : , 2 ) , elem_M_D, s ize ( 1 ) , s ize ( 2 ) ) ;
ind_F_D2=[11 14 ;11 9 ;11 17 ;12 8 ;12 13 ;12 1 7 ] ;elem_F_D2=[1 −1 sin ( teta_C+betta ) −1 −1 −cos ( teta_C+betta ) ] ;F_D2=sparse (ind_F_D2 ( : , 1 ) , ind_F_D2 ( : , 2 ) , elem_F_D2 , s ize ( 1 ) , s ize ( 2 ) ) ;
ind_M_D2=[13 10 ;13 14 ;13 18 ;13 13 ;13 9 ;13 8 ;13 17 ;14 14 ; . . .14 17 ;15 10 ;15 18 ;15 13 ;15 14 ;15 8 ;15 9 ;15 1 7 ] ;
elem_M_D2=[ sin (2∗ teta_C+2∗betta ) l_gD∗ sin (2∗ teta_C+2∗betta ) . . .cos ( teta_C+betta ) l_gD∗cos (2∗ teta_C+2∗betta ) . . .( l_4−l_gD)∗ sin (2∗ teta_C+2∗betta ) . . .−(l_4−l_gD)∗ cos (2∗ teta_C+2∗betta ) l_gD∗cos ( teta_C+betta ) . . .
−R/2 −R∗ sin ( teta_C+betta )/2 . . .−cos (2∗ teta_C+2∗betta ) sin ( teta_C+betta ) . . .l_gD∗ sin (2∗ teta_C+2∗betta ) . . .−l_gD∗cos (2∗ teta_C+2∗betta ) . . .−(l_4−l_gD)∗ sin (2∗ teta_C+2∗betta ) . . .−(l_4−l_gD)∗ cos (2∗ teta_C+2∗betta ) . . .

APÉNDICE B. PROGRAMAS DESARROLLADOS PARA EL CAPITULO ?? 407
−l_gD∗ sin ( teta_C+betta ) ] ;M_D2=sparse (ind_M_D2( : , 1 ) , ind_M_D2( : , 2 ) , . . .
elem_M_D2, s ize ( 1 ) , s ize ( 2 ) ) ;
ind_F_P=[16 15 ;16 16 ;17 15 ;18 17 ;18 18 ;19 1 7 ] ;elem_F_P=[l_gE 1 1 l_gE 1 1 ] ;F_P=sparse (ind_F_P( : , 1 ) , ind_F_P( : , 2 ) , elem_F_P, s ize ( 1 ) , s ize ( 2 ) ) ;
A=sparse ( f u l l (F_C)+ f u l l (M_C)+ f u l l (F_D)+ f u l l (M_D) . . .+f u l l (F_D2)+ f u l l (M_D2)+ f u l l (F_P) ) ;
Fichero B_caso1.m
function [B]=B_caso1 ( teta_C ,w, dwdt ,F_E,F_E_,T, param_geomas )betta = param_geomas ( 1 ) ;R = param_geomas ( 2 ) ;l_6 = param_geomas ( 3 ) ;l_4 = param_geomas ( 4 ) ;l_gD = param_geomas ( 5 ) ;l_gE = param_geomas ( 6 ) ;JyzC = param_geomas ( 7 ) ;IyC = param_geomas ( 8 ) ;JxyC = param_geomas ( 9 ) ;JyzD = param_geomas ( 1 0 ) ;IyD = param_geomas ( 1 1 ) ;m_E = param_geomas ( 1 2 ) ;m_E_ = param_geomas ( 1 3 ) ;m_D = param_geomas ( 1 4 ) ;
B=zeros ( 1 9 , 1 ) ;B(3 ) = −2∗JxyC∗dwdt+JyzC∗w∗w;B(4) = 2∗ IyC∗dwdt+T;B(5) = −JyzC∗dwdt−JxyC∗w∗w;B(6) = m_D∗dwdt∗R/2 ;B(7) = −m_D∗w∗w∗R/2 ;B(8) = JyzD∗w∗w;B(9) = 2∗IyD∗dwdt ;B(10) = 2∗JyzD∗dwdt ;B(11) = m_D∗dwdt∗R/2 ;B(12) = −m_D∗w∗w∗R/2 ;B(13) = −JyzD∗w∗w;B(14) = 2∗IyD∗dwdt ;B(15) = −2∗JyzD∗dwdt ;B(17)=F_E+m_E∗(−R∗w∗w∗cos ( teta_C)−R∗dwdt∗ sin ( teta_C ) ) ;
Generador Solar de Ciclo de Aire

408B.3. PROGRAMA DESARROLLADO PARA LA OPTIMIZACIÓN DE LAS
REACCIONES (SECCIÓN ??)
B(19)=−F_E_+m_E_∗(−R∗w∗w∗cos ( teta_C+betta ) . . .−R∗dwdt∗ sin ( teta_C+betta ) ) ;
Fichero optim_reacc.m
clearparametros ;nombres = [ ’R_{SC_x}␣ ’ ; ’R_{SC_z}␣ ’ ; ’M_{SC_x}␣ ’ ; ’M_{SC_z}␣ ’ ; . . .
’R_{45_r}␣ ’ ; ’R_{45_t}␣ ’ ; ’M_{45_z}␣ ’ ; ’R_{45_r}∗ ’ ; . . .’R_{45_t}∗ ’ ; ’M_{45_z}∗ ’ ; ’R_{23_n}␣ ’ ; ’R_{23_t}␣ ’ ; . . .’R_{23_n}∗ ’ ; ’R_{23_t}∗ ’ ; ’R_{31_z}␣ ’ ; ’M_{31_x}␣ ’ ; . . .’R_{31_z}∗ ’ ; ’M_{31_x}∗ ’ ] ;
nom_mod=[ ’ $ | \ vec {F_{SC}} | $␣ ’ ; ’ $ | \ vec {M_{SC}} | $␣ ’ ; . . .’ $ | \ vec {F_{45}} | $␣ ’ ; ’ $ | \ vec {M_{45}}| $␣ ’ ; . . .’ $ | \ vec {F_{45}}∗ | $ ’ ; ’ $ | \ vec {M_{45}}∗ | $ ’ ; . . .
$ | \ vec {F_{23}}| $ ’ ; ’ $ | \ vec {F_{23}}∗ | $ ’ ; . . .’ $ | \ vec {F_{31}} | $␣ ’ ; ’ $ | \ vec {M_{31}}| $␣ ’ ; . . .’ $ | \ vec {F_{31}}∗ | $ ’ ; ’ $ | \ vec {M_{31}}∗ | $ ’ ]
i_mom=[2 4 6 10 1 2 ] ;i_for =[1 3 5 7 8 9 1 1 ] ;
[m, Vres ] = det_m_vres_iso (A1 ,A1_,R, betta , param_ciclo , . . .ctes_termo , proporc iones , Tr ) ;
teta_C=0:0 .1 : 2∗ pi ;
p =@( teta_C ) s t i r l i n g_ i s o t e rmo ( teta_C ,m, Vres ,A1 ,A1_, . . .R, betta , param_ciclo , ctes_termo , proporc iones , Tr ) ;
T_iso = par_w_cte ( teta_C ,w, p , p ,m,m_E, Vres ,A1 ,A1_, . . .R, betta , param_ciclo , ctes_termo ) ;
[ p1 ,V] = s t i r l i n g_ i s o t e rmo ( teta_C ,m, Vres ,A1 ,A1_,R, . . .betta , param_ciclo , ctes_termo , proporc iones , Tr ) ;
j =0;nombre_variable=’ l_4␣ [m] ’for l_4 =0 . 0 5 : 0 . 0 5 : 0 . 0 5
j=j+1w=rpm∗2∗pi /60 ;per iod=2∗pi/w;param_geomas(4)=l_4 ;l_gD=l_4 /2 ;param_geomas(5)=l_gD ;

APÉNDICE B. PROGRAMAS DESARROLLADOS PARA EL CAPITULO ?? 409
[A1 ,A1_]=param_geom( Ci l indrada , re l_areas ,R) ;[m, Vres ] = det_m_vres_iso (A1 ,A1_,R, betta , param_ciclo , . . .
ctes_termo , proporc iones , Tr ) ;p =@( teta_C ) s t i r l i n g_ i s o t e rmo ( teta_C ,m, Vres ,A1 ,A1_,R, . . .
betta , param_ciclo , ctes_termo , proporc iones , Tr ) ;T_iso = par_w_cte ( teta_C ,w, p , p ,m,m_E, Vres ,A1 ,A1_, . . .
R, betta , param_ciclo , ctes_termo ) ;[ p1 ,V] = s t i r l i n g_ i s o t e rmo ( teta_C ,m, Vres ,A1 ,A1_,R, . . .
betta , param_ciclo , ctes_termo , proporc iones , Tr ) ;v a r i a b l e ( j ,1)= l_4 ;
for i =1: s ize ( teta_C , 2 )A = A_caso1 ( teta_C ( i ) , param_geomas ) ;F_E = p1 ( i )∗A1 ;F_E_ = p1 ( i )∗A1_;B = B_caso1 ( teta_C ( i ) ,w, dwdt ,F_E,F_E_, T_iso ( i ) , param_geomas ) ;%%Resolvemos e l s i s tema l i n e a l de ecuac ionesx=A\B;%%Guardamos l o s datos en v e c t o r e s f i l aangulos ( i ,1)=teta_C ( i ) ;s o l u c i o n e s ( i , : )=x ’ ;modul ( i ,1)= sqrt ( s o l u c i o n e s ( i ,1) .^2+ so l u c i o n e s ( i , 2 ) . ^ 2 ) ;modul ( i ,2)= sqrt ( s o l u c i o n e s ( i ,3) .^2+ so l u c i o n e s ( i , 4 ) . ^ 2 ) ;modul ( i ,3)= sqrt ( s o l u c i o n e s ( i ,5) .^2+ so l u c i o n e s ( i , 6 ) . ^ 2 ) ;modul ( i ,4)=abs ( s o l u c i o n e s ( i , 7 ) ) ;modul ( i ,5)= sqrt ( s o l u c i o n e s ( i ,8) .^2+ so l u c i o n e s ( i , 9 ) . ^ 2 ) ;modul ( i ,6)=abs ( s o l u c i o n e s ( i , 1 0 ) ) ;modul ( i ,7)= sqrt ( s o l u c i o n e s ( i ,11) .^2+ so l u c i o n e s ( i , 1 2 ) . ^ 2 ) ;modul ( i ,8)= sqrt ( s o l u c i o n e s ( i ,13) .^2+ so l u c i o n e s ( i , 1 4 ) . ^ 2 ) ;modul ( i ,9)=abs ( s o l u c i o n e s ( i , 1 5 ) ) ;modul ( i ,10)=abs ( s o l u c i o n e s ( i , 1 6 ) ) ;modul ( i ,11)=abs ( s o l u c i o n e s ( i , 1 7 ) ) ;modul ( i ,12)=abs ( s o l u c i o n e s ( i , 1 8 ) ) ;
endmodulos ( : , 1 )= sqrt ( s o l u c i o n e s ( : , 1 ) .^2+ so l u c i o n e s ( : , 2 ) . ^ 2 ) ;modulos ( : , 2 )= sqrt ( s o l u c i o n e s ( : , 3 ) .^2+ so l u c i o n e s ( : , 4 ) . ^ 2 ) ;modulos ( : , 3 )= sqrt ( s o l u c i o n e s ( : , 5 ) .^2+ so l u c i o n e s ( : , 6 ) . ^ 2 ) ;modulos ( : , 4 )=abs ( s o l u c i o n e s ( : , 7 ) ) ;modulos ( : , 5 )= sqrt ( s o l u c i o n e s ( : , 8 ) .^2+ so l u c i o n e s ( : , 9 ) . ^ 2 ) ;modulos ( : , 6 )=abs ( s o l u c i o n e s ( : , 1 0 ) ) ;modulos ( : , 7 )= sqrt ( s o l u c i o n e s ( : , 11) .^2+ so l u c i o n e s ( : , 1 2 ) . ^ 2 ) ;modulos ( : , 8 )= sqrt ( s o l u c i o n e s ( : , 13) .^2+ so l u c i o n e s ( : , 1 4 ) . ^ 2 ) ;modulos ( : , 9 )=abs ( s o l u c i o n e s ( : , 1 5 ) ) ;
Generador Solar de Ciclo de Aire

410B.3. PROGRAMA DESARROLLADO PARA LA OPTIMIZACIÓN DE LAS
REACCIONES (SECCIÓN ??)
modulos ( : , 10)=abs ( s o l u c i o n e s ( : , 1 6 ) ) ;modulos ( : , 11)=abs ( s o l u c i o n e s ( : , 1 7 ) ) ;modulos ( : , 12)=abs ( s o l u c i o n e s ( : , 1 8 ) ) ;
maximos ( j , : )=max( s o l u c i one s , [ ] , 1 ) ;maxmod( j , : )=max(modulos , [ ] , 1 ) ;
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;[AX,H1 ,H2 ] = plotyy ( angulos , s o l u c i o n e s ( : , 1 : 2 ) , . . .
angulos , s o l u c i o n e s ( : , 3 : 4 ) ) ;legend (AX(1 ) , nombres ( 1 : 2 , : ) ) ;legend (AX(2 ) , nombres ( 3 : 4 , : ) , ’ Locat ion ’ , ’ NorthWest ’ ) ;set (get (AX(1 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’ Fuerzas ␣ [N] ’ )set (get (AX(2 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’Momentos␣ [Nm] ’ )xlabel ( ’ \theta_C␣ [ rad ] ’ )
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;subplot ( 2 , 1 , 1 )[AX,H1 ,H2 ] = plotyy ( angulos , s o l u c i o n e s ( : , 5 : 6 ) , . . .
angulos , s o l u c i o n e s ( : , 7 ) ) ;legend (AX(1 ) , nombres ( 5 : 6 , : ) ) ;legend (AX(2 ) , nombres ( 7 , : ) , ’ Locat ion ’ , ’ NorthWest ’ ) ;set (get (AX(1 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’ Fuerzas ␣ [N] ’ )set (get (AX(2 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’Momentos␣ [Nm] ’ )xlabel ( ’ \theta_C␣ [ rad ] ’ )
subplot ( 2 , 1 , 2 )[AX,H1 ,H2 ] = plotyy ( angulos , s o l u c i o n e s ( : , 8 : 9 ) , . . .
angulos , s o l u c i o n e s ( : , 1 0 ) ) ;legend (AX(1 ) , nombres ( 8 : 9 , : ) ) ;legend (AX(2 ) , nombres ( 1 0 , : ) , ’ Locat ion ’ , ’ NorthWest ’ ) ;set (get (AX(1 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’ Fuerzas ␣ [N] ’ )set (get (AX(2 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’Momentos␣ [Nm] ’ )xlabel ( ’ \theta_C␣ [ rad ] ’ )
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;subplot ( 2 , 1 , 1 )h=plot ( angulos , s o l u c i o n e s ( : , 1 1 : 1 2 ) ) ;legend ( nombres ( 1 1 : 1 2 , : ) ) ;ylabel ( ’ Fuerzas ␣ [N] ’ ) ;subplot ( 2 , 1 , 2 )h=plot ( angulos , s o l u c i o n e s ( : , 1 3 : 1 4 ) ) ;legend ( nombres ( 1 3 : 1 4 , : ) ) ;

APÉNDICE B. PROGRAMAS DESARROLLADOS PARA EL CAPITULO ?? 411
ylabel ( ’ Fuerzas ␣ [N] ’ ) ;xlabel ( ’ \theta_C␣ [ rad ] ’ )
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;subplot ( 2 , 1 , 1 )[AX,H1 ,H2 ] = plotyy ( angulos , s o l u c i o n e s ( : , 1 5 ) , . . .
angulos , s o l u c i o n e s ( : , 1 6 ) ) ;legend (AX(1 ) , nombres ( 1 5 , : ) ) ;legend (AX(2 ) , nombres ( 1 6 , : ) , ’ Locat ion ’ , ’ NorthWest ’ ) ;set (get (AX(1 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’ Fuerzas ␣ [N] ’ )set (get (AX(2 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’Momentos␣ [Nm] ’ )xlabel ( ’ \theta_C␣ [ rad ] ’ )
subplot ( 2 , 1 , 2 )[AX,H1 ,H2 ] = plotyy ( angulos , s o l u c i o n e s ( : , 1 7 ) , . . .
angulos , s o l u c i o n e s ( : , 1 8 ) ) ;legend (AX(1 ) , nombres ( 1 7 , : ) ) ;legend (AX(2 ) , nombres ( 1 8 , : ) , ’ Locat ion ’ , ’ NorthWest ’ ) ;set (get (AX(1 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’ Fuerzas ␣ [N] ’ )set (get (AX(2 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’Momentos␣ [Nm] ’ )xlabel ( ’ \theta_C␣ [ rad ] ’ )
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;plot ( teta_C , modul ( : , i_for ) )h=legend (nom_mod( i_for , : ) ) ;set (h , ’ Locat ion ’ , ’ EastOutside ’ , ’ I n t e r p r e t e r ’ , ’ l a t e x ’ )xlabel ( ’ \theta_C␣ [ rad ] ’ )ylabel ( ’ Fuerzas ␣ [N] ’ ) ;
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;plot ( teta_C , modul ( : , i_mom))h=legend (nom_mod(i_mom , : ) ) ;set (h , ’ Locat ion ’ , ’ EastOutside ’ , ’ I n t e r p r e t e r ’ , ’ l a t e x ’ )xlabel ( ’ \theta_C␣ [ rad ] ’ )ylabel ( ’Momentos␣ [Nm] ’ ) ;
end[ fuerzas_min , pos_fmin]=min(maxmod ( : , i_for ) )[ momentos_min , pos_mmin]=min(maxmod ( : , i_mom))
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;[AX,H1 ,H2 ] = plotyy ( va r i ab l e , maximos ( : , 1 : 2 ) , . . . .
va r i ab l e , maximos ( : , 3 : 4 ) ) ;legend (AX(1 ) , nombres ( 1 : 2 , : ) , ’ Locat ion ’ , ’ NorthWest ’ ) ;
Generador Solar de Ciclo de Aire

412B.3. PROGRAMA DESARROLLADO PARA LA OPTIMIZACIÓN DE LAS
REACCIONES (SECCIÓN ??)
legend (AX(2 ) , nombres ( 3 : 4 , : ) ) ;set (get (AX(1 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’ Fuerzas ␣ [N] ’ )set (get (AX(2 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’Momentos␣ [Nm] ’ )xlabel ( nombre_variable )print −dpdf sopor te . pdf
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;subplot ( 2 , 1 , 1 )[AX,H1 ,H2 ] = plotyy ( va r i ab l e , maximos ( : , 5 : 6 ) , . . .
va r i ab l e , maximos ( : , 7 ) ) ;legend (AX(1 ) , nombres ( 5 : 6 , : ) , ’ Locat ion ’ , ’ NorthWest ’ ) ;legend (AX(2 ) , nombres ( 7 , : ) ) ;set (get (AX(1 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’ Fuerzas ␣ [N] ’ )set (get (AX(2 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’Momentos␣ [Nm] ’ )xlabel ( nombre_variable )
subplot ( 2 , 1 , 2 )[AX,H1 ,H2 ] = plotyy ( va r i ab l e , maximos ( : , 8 : 9 ) , . . .
va r i ab l e , maximos ( : , 1 0 ) ) ;legend (AX(1 ) , nombres ( 8 : 9 , : ) , ’ Locat ion ’ , ’ NorthWest ’ ) ;legend (AX(2 ) , nombres ( 1 0 , : ) ) ;set (get (AX(1 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’ Fuerzas ␣ [N] ’ )set (get (AX(2 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’Momentos␣ [Nm] ’ )xlabel ( nombre_variable )print −dpdf d i s co s_c ig . pdf
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;subplot ( 2 , 1 , 1 )h=plot ( va r i ab l e , maximos ( : , 1 1 : 1 2 ) ) ;legend ( nombres ( 1 1 : 1 2 , : ) ) ;ylabel ( ’ Fuerzas ␣ [N] ’ ) ;xlabel ( nombre_variable )subplot ( 2 , 1 , 2 )h=plot ( va r i ab l e , maximos ( : , 1 3 : 1 4 ) ) ;legend ( nombres ( 1 3 : 1 4 , : ) ) ;ylabel ( ’ Fuerzas ␣ [N] ’ ) ;xlabel ( nombre_variable )print −dpdf d i scos_coronas . pdf
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;subplot ( 2 , 1 , 1 )[AX,H1 ,H2 ] = plotyy ( va r i ab l e , maximos ( : , 1 5 ) , . . .

APÉNDICE B. PROGRAMAS DESARROLLADOS PARA EL CAPITULO ?? 413
var i ab l e , maximos ( : , 1 6 ) ) ;legend (AX(1 ) , nombres ( 1 5 , : ) , ’ Locat ion ’ , ’ NorthWest ’ ) ;legend (AX(2 ) , nombres ( 1 6 , : ) ) ;set (get (AX(1 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’ Fuerzas ␣ [N] ’ )set (get (AX(2 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’Momentos␣ [Nm] ’ )xlabel ( nombre_variable )subplot ( 2 , 1 , 2 )[AX,H1 ,H2 ] = plotyy ( va r i ab l e , maximos ( : , 1 7 ) , . . .
va r i ab l e , maximos ( : , 1 8 ) ) ;legend (AX(1 ) , nombres ( 1 7 , : ) , ’ Locat ion ’ , ’ NorthWest ’ ) ;legend (AX(2 ) , nombres ( 1 8 , : ) ) ;set (get (AX(1 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’ Fuerzas ␣ [N] ’ )set (get (AX(2 ) , ’ Ylabe l ’ ) , ’ S t r ing ’ , ’Momentos␣ [Nm] ’ )xlabel ( nombre_variable )print −dpdf discos_embolos . pdf
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;plot ( va r i ab l e ,maxmod ( : , i_for ) ) ;h=legend (nom_mod( i_for , : ) ) ;set (h , ’ Locat ion ’ , ’ EastOutside ’ , ’ I n t e r p r e t e r ’ , ’ l a t e x ’ )xlabel ( nombre_variable ) ;ylabel ( ’ Fuerzas ␣ [N] ’ ) ;print −dpdf modulomax_fuerzas . pdf
f igure ( ’ Color ’ , [ 1 1 1 ] ) ;plot ( va r i ab l e ,maxmod ( : , i_mom) ) ;h=legend (nom_mod(i_mom , : ) ) ;set (h , ’ Locat ion ’ , ’ EastOutside ’ , ’ I n t e r p r e t e r ’ , ’ l a t e x ’ )xlabel ( nombre_variable ) ;ylabel ( ’Momentos␣ [Nm] ’ ) ;print −dpdf modulomax_momentos . pdf
Generador Solar de Ciclo de Aire

414B.3. PROGRAMA DESARROLLADO PARA LA OPTIMIZACIÓN DE LAS
REACCIONES (SECCIÓN ??)

Apéndice C
Programas desarrollados para elmodelo térmico del motor
C.1. dibujar12b.m
t=linspace (0 , pi /2 ) ;for i =1:100
P( i )=p12b_cv ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v12 ( t ( i ) ) ;M( i )=mr12 ( t ( i ) ) ;T( i )=t12b_cv ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
C.2. dibujar12.m
t=linspace (0 , pi /2 ) ;for i =1:100
P( i )=p12_cv ( t ( i ) ) ;
415

416 C.3. DIBUJAR23B.M
V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v12 ( t ( i ) ) ;M( i )=mr12 ( t ( i ) ) ;T( i )=t12_cv ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
C.3. dibujar23b.m
t=linspace (pi /2 ,pi ) ;for i =1:100
P( i )=p23b_ep ( t ( i ) ) ;V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v23 ( t ( i ) ) ;M( i )=mr23 ( t ( i ) ) ;T( i )=t23b_ep ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
C.4. dibujar23.m
t=linspace (pi /2 ,pi ) ;

APÉNDICE C. PROGRAMAS DESARROLLADOS PARA EL MODELO TÉRMICODEL MOTOR 417
for i =1:100P( i )=p23_ep ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v23 ( t ( i ) ) ;M( i )=mr23 ( t ( i ) ) ;T( i )=t23_ep ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
C.5. dibujar34b.m
t=linspace (pi , 3∗ pi /2 ) ;for i =1:100
P( i )=p34b_ev ( t ( i ) ) ;V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v34 ( t ( i ) ) ;M( i )=mr34 ( t ( i ) ) ;T( i )=t34b_ev ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
Generador Solar de Ciclo de Aire

418 C.6. DIBUJAR34.M
C.6. dibujar34.m
t=linspace (pi , 3∗ pi /2 ) ;for i =1:100
P( i )=p34_ev ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v34 ( t ( i ) ) ;M( i )=mr34 ( t ( i ) ) ;T( i )=t34_ev ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
C.7. dibujar41b.m
t=linspace (3∗pi /2 ,2∗pi ) ;for i =1:100
P( i )=p41b_cp ( t ( i ) ) ;V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v41 ( t ( i ) ) ;M( i )=mr41 ( t ( i ) ) ;T( i )=t41b_cp ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )

APÉNDICE C. PROGRAMAS DESARROLLADOS PARA EL MODELO TÉRMICODEL MOTOR 419
plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
C.8. dibujar41.m
t=linspace (3∗pi /2 ,2∗pi ) ;for i =1:100
P( i )=p41_cp ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v41 ( t ( i ) ) ;M( i )=mr41 ( t ( i ) ) ;T( i )=t41_cp ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
C.9. dibujarc.m
t=linspace (0 ,2∗pi , 4 0 0 ) ;for i =1:100
P( i )=p12b_cv ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v12 ( t ( i ) ) ;M( i )=mr12 ( t ( i ) ) ;T( i )=t12b_cv ( t ( i ) ) ;
endfor i =101:200
P( i )=p23_ep ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v23 ( t ( i ) ) ;M( i )=mr23 ( t ( i ) ) ;T( i )=t23_ep ( t ( i ) ) ;
endfor i =201:300
Generador Solar de Ciclo de Aire

420 C.10. DIBUJARP.M
P( i )=p34_ev ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v34 ( t ( i ) ) ;M( i )=mr34 ( t ( i ) ) ;T( i )=t34_ev ( t ( i ) ) ;
endfor i =301:400
P( i )=p41_cp ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v41 ( t ( i ) ) ;M( i )=mr41 ( t ( i ) ) ;T( i )=t41_cp ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
C.10. dibujarp.m
t=linspace (0 ,2∗pi , 4 0 0 ) ;for i =1:100
P( i )=p12_cv ( t ( i ) ) ;V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v12 ( t ( i ) ) ;M( i )=mr12 ( t ( i ) ) ;T( i )=t12_cv ( t ( i ) ) ;
endfor i =101:200
P( i )=p23b_ep ( t ( i ) ) ;V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v23 ( t ( i ) ) ;M( i )=mr23 ( t ( i ) ) ;T( i )=t23b_ep ( t ( i ) ) ;
end

APÉNDICE C. PROGRAMAS DESARROLLADOS PARA EL MODELO TÉRMICODEL MOTOR 421
for i =201:300P( i )=p34b_ev ( t ( i ) ) ;V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v34 ( t ( i ) ) ;M( i )=mr34 ( t ( i ) ) ;T( i )=t34b_ev ( t ( i ) ) ;
endfor i =301:400
P( i )=p41b_cp ( t ( i ) ) ;V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v41 ( t ( i ) ) ;M( i )=mr41 ( t ( i ) ) ;T( i )=t41b_cp ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
C.11. dibujarpvc.m
t=linspace (0 ,2∗pi , 4 0 0 ) ;for i =1:100
P( i )=p12b_cv ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v12 ( t ( i ) ) ;M( i )=mr12 ( t ( i ) ) ;T( i )=t12b_cv ( t ( i ) ) ;
endfor i =101:200
P( i )=p23_ep ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v23 ( t ( i ) ) ;M( i )=mr23 ( t ( i ) ) ;T( i )=t23_ep ( t ( i ) ) ;
Generador Solar de Ciclo de Aire

422 C.12. DIBUJARPVP.M
endfor i =201:300
P( i )=p34_ev ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v34 ( t ( i ) ) ;M( i )=mr34 ( t ( i ) ) ;T( i )=t34_ev ( t ( i ) ) ;
endfor i =301:400
P( i )=p41_cp ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v41 ( t ( i ) ) ;M( i )=mr41 ( t ( i ) ) ;T( i )=t41_cp ( t ( i ) ) ;
endplot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )
C.12. dibujarpvp.m
t=linspace (0 ,2∗pi , 4 0 0 ) ;for i =1:100
P( i )=p12_cv ( t ( i ) ) ;V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v12 ( t ( i ) ) ;M( i )=mr12 ( t ( i ) ) ;T( i )=t12_cv ( t ( i ) ) ;
endfor i =101:200
P( i )=p23b_ep ( t ( i ) ) ;V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v23 ( t ( i ) ) ;M( i )=mr23 ( t ( i ) ) ;T( i )=t23b_ep ( t ( i ) ) ;
endfor i =201:300
P( i )=p34b_ev ( t ( i ) ) ;V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v34 ( t ( i ) ) ;M( i )=mr34 ( t ( i ) ) ;T( i )=t34b_ev ( t ( i ) ) ;
endfor i =301:400

APÉNDICE C. PROGRAMAS DESARROLLADOS PARA EL MODELO TÉRMICODEL MOTOR 423
P( i )=p41b_cp ( t ( i ) ) ;V( i )=Vpotencia ( t ( i ) ) ;v ( i )=v41 ( t ( i ) ) ;M( i )=mr41 ( t ( i ) ) ;T( i )=t41b_cp ( t ( i ) ) ;
endplot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )
C.13. mr12.m
function M12=mr12 ( t ) ;M12=−1.225∗(Vcompresion ( t )/ Vcompresion ( 0 ) )^ ( ( 0 . 6 /1 . 4 )+(0 . 8∗ t / (1 . 4∗ pi ) ) ) ;M12=M12∗( Vcompresion ( t ) ∗ ( 0 . 8 / ( 1 . 4 ∗ pi ) )∗ log ( Vcompresion ( t ) )+( (0 . 6/1 . 4 )+(0 . 8∗ t / (1 . 4∗ pi ) )+1)∗ ( ( pi ∗0.001/8)∗(− cos ( t ) ) ) ) ;
C.14. mr23.m
function M23=mr23 ( t ) ;M23=−1.225∗(Vpotencia ( t )/ Vpotencia (pi /2 ) )^ ( ( 0 . 2/1 . 4 )+(0 . 8∗ t / (1 . 4∗ pi ) ) ) ;M23=M23∗( Vpotencia ( t ) ∗ ( 0 . 8 / ( 1 . 4 ∗ pi ) )∗ log ( Vpotencia ( t ) )+( (0 . 2/1 . 4 )+(0 . 8∗ t / (1 . 4∗ pi ) )+1)∗ ( ( pi ∗0 .001/8)∗ ( sin ( t ) ) ) ) ;
C.15. mr34.m
function M34=mr34 ( t ) ;M34=−1.225∗(Vpotencia ( t )/ Vpotencia (pi ) )^(( −0 .2/1 .4)+(0 .8∗ t / (1 . 4∗ pi ) ) ) ;M34=M34∗( Vpotencia ( t ) ∗ ( 0 . 8 / ( 1 . 4 ∗ pi ) )∗ log ( Vpotencia ( t ))+((−0.2/1.4)+(0.8∗ t / (1 . 4∗ pi ) )+1)∗ ( ( pi ∗0 .001/8)∗ ( sin ( t ) ) ) ) ;
C.16. mr41.m
function M41=mr41 ( t ) ;M41=−1.225∗(Vpotencia ( t )/ Vpotencia (3∗pi /2))^(( −0 .6/1 .4)+(0 .8∗ t / (1 . 4∗ pi ) ) ) ;M41=M41∗( Vpotencia ( t ) ∗ ( 0 . 8 / ( 1 . 4 ∗ pi ) )∗ log ( Vpotencia ( t ))+((−0.6/1.4)+(0.8∗ t / (1 . 4∗ pi ) )+1)∗ ( ( pi ∗0 .001/8)∗ ( sin ( t ) ) ) ) ;
C.17. p12b_cv.m
function P12=p12b_cv ( t ) ;P12=1013250∗(Vcompresion ( t )/ Vcompresion (0))^(1+0.8∗ ( t+(pi /20))/ pi ) ;
C.18. p12_cv.m
function P12=p12_cv ( t ) ;P12=1.4∗p12b_cv (pi /20)∗ ( Vcompresion ( t+(pi /20))/ Vpotencia ( t ) ) ;P12=P12∗( Vcompresion ( t+(pi /20))/ Vcompresion (pi /20))^((1+0.8∗ t+(pi /20))/ pi ) ;
Generador Solar de Ciclo de Aire
424 C.19. P23B_EP.M
P12=P12∗abs ( ( 0 . 8 / ( 1 . 4 ∗ pi ) )∗ log ( Vcompresion ( t+(pi /20 ) ) ) − ( ( (0 . 6/1 . 4 )+( (0 . 8∗ t+(pi /20 ) ) / (1 . 4∗ pi ) ) )+1)∗ ( cos ( t+(pi /20))/(1.1− sin ( t+(pi / 2 0 ) ) ) ) ) ;P12=P12/abs ((−0.8/pi )∗ log ( Vpotencia ( t ))+(0.4−(0 .8∗ t /pi ) )∗ ( sin ( t )/(1.1− cos ( t ) ) ) ) ;
C.19. p23b_ep.m
function P23=p23b_ep ( t ) ;P23=(7.4362 e+003/3.2205 e+004)∗p12_cv ( ( pi /2)+(pi /20) )∗ ( Vpotencia ( t )/ Vpotencia (pi /2) )^(0 .6+0 .8∗ ( t+(pi /20))/ pi ) ;
C.20. p23_ep.m
function P23=p23_ep ( t ) ;P23=(2 .4673/7 .1212)∗1 .4∗p12_cv ( ( pi /2)+(pi /20) )∗ ( Vpotencia ( t+(pi /20))/ Vcompresion ( t ) ) ;P23=P23∗( Vpotencia ( t+(pi /20))/ Vpotencia ( ( pi /2)+(pi /20))^(0 .6+0.8∗ ( t+(pi /20))/ pi ) ) ;P23=P23∗abs ( 0 . 8 / ( 1 . 4 ∗ pi )∗ log ( Vpotencia ( t+(pi /20 ) ) )+( ( ( 0 . 2/1 . 4 )+(0 . 8∗ ( t+(pi /20 ) ) / (1 . 4∗ pi ) ) )+1)∗ ( sin ( t+(pi /20))/(1.1− cos ( t+(pi / 2 0 ) ) ) ) ) ;P23=P23/abs ((−0.8/pi )∗ log ( Vcompresion ( t ))+((0.8−0.8∗ t /pi )∗(−cos ( t )/(1.1− sin ( t ) ) ) ) ) ;
C.21. p34b_ev.m
function P34=p34b_ev ( t ) ;P34=(1.8869/1.9195)∗p23b_ep (pi+(pi /20) )∗ ( Vpotencia ( t )/ Vpotencia (pi ) )^(0 .2+0 .8∗ ( t+(pi /20))/ pi ) ;
C.22. p34_ev.m
function P34=p34_ev ( t ) ;P34=(1.0132 e+6/3.060 e+4)∗1.4∗p23b_ep (pi+(pi /20) )∗ ( Vpotencia ( t+(pi /20))/ Vcompresion ( t ) ) ;P34=P34∗( Vpotencia ( t+(pi /20))/ Vpotencia (pi+(pi /20) ) )^(0 .2+0 .8∗ ( t+(pi /20))/ pi ) ;P34=P34∗abs ( ( 0 . 8 / ( 1 . 4 ∗ pi ) )∗ log ( Vpotencia ( t+(pi /20)) )+((( −0 .2/1 .4)+(0 .8∗ ( t+(pi /20 ) ) / (1 . 4∗ pi ) ) )+1)∗ ( sin ( t+(pi /20))/(1.1− cos ( t+(pi / 2 0 ) ) ) ) ) ;P34=P34/abs ((−0.8/pi )∗ log ( Vcompresion ( t ))+((1.2−0.8∗ t /pi )∗(−cos ( t )/(1.1− sin ( t ) ) ) ) ) ;
C.23. p41b_cp.m
function P41=p41b_cp ( t ) ;P41=(7.4364/5.7747)∗p34b_ev (3∗pi/2+(pi /20) )∗ ( Vpotencia ( t )/ Vpotencia (3∗pi /2))^(−0.2+0.8∗( t+(pi /20))/ pi ) ;
C.24. p41_cp.m
function P41=p41_cp ( t ) ;P41=(2.2981 e+5/5.9513 e+3)∗1.4∗p34b_ev (3∗pi/2+(pi /20) )∗ ( Vpotencia ( t+(pi /20))/ Vcompresion ( t ) ) ;P41=P41∗( Vpotencia ( t+(pi /20))/ Vpotencia (3∗pi/2+(pi /20)))^(−0.2+0.8∗( t+(pi /20))/ pi ) ;P41=P41∗abs ( ( 0 . 8 / ( 1 . 4 ∗ pi ) )∗ log ( Vpotencia ( t+(pi /20)) )+((( −0 .6/1 .4)+(0 .8∗ ( t+(pi /20 ) ) / (1 . 4∗ pi ) ) )+1)∗ ( sin ( t+(pi /20))/(1.1− cos ( t+(pi / 2 0 ) ) ) ) ) ;P41=P41/abs ((−0.8/pi )∗ log ( Vcompresion ( t ))+((1.6−0.8∗ t /pi )∗(−cos ( t )/(1.1− sin ( t ) ) ) ) ) ;
C.25. t12b_cv.m

APÉNDICE C. PROGRAMAS DESARROLLADOS PARA EL MODELO TÉRMICODEL MOTOR 425
function T12=t12b_cv ( t ) ;T12=500∗(Vcompresion ( t )/ Vcompresion (0) )^((4/7)+(8∗ ( t+(pi /20))/(35∗ pi ) ) ) ;
C.26. t12_cv.m
function T12=t12_cv ( t ) ;T12=500∗(p12_cv ( t )/p12_cv (0 ) )^( (0 . 4 − (0 . 8∗ ( t+(pi /20))/ pi ) )/ (1 . 4 − (0 . 8∗ ( t+(pi /20))/ pi ) ) ) ;
C.27. t23b_ep.m
function T23=t23b_ep ( t ) ;T23=(682.5435/842.7327)∗ t12_cv ( ( pi /2)+(pi /20) )∗ ( Vpotencia ( t )/ Vpotencia (pi /2))^((16/35)+(8∗( t+(pi /20))/(35∗ pi ) ) ) ;
C.28. t23_ep.m
function T23=t23_ep ( t ) ;T23=(682.5435/99.2655)∗ t12b_cv ( ( pi /2)+(pi /20) )∗ ( p23_ep ( t )/p23_ep (pi /2) )^( (0 .8 − (0 .8∗ ( t+(pi /20))/ pi ) )/ (1 . 8 − (0 . 8∗ ( t+(pi /20))/ pi ) ) ) ;
C.29. t34b_ev.m
function T34=t34b_ev ( t ) ;T34=(1.0713/1.0747)∗ t23b_ep (pi+(pi /20) )∗ ( Vpotencia ( t )/ Vpotencia (pi ))^((12/35)+(8∗ ( t+(pi /20))/(35∗ pi ) ) ) ;
C.30. t34_ev.m
function T34=t34_ev ( t ) ;T34=(584.6590/482.9284)∗ t23_ep (pi+(pi /20) )∗ ( p34_ev ( t )/p34_ev (pi ) )^( (1 .2 − (0 . 8∗ ( t+(pi /20))/ pi ) )/ (2 . 2 − (0 . 8∗ ( t+(pi /20))/ pi ) ) ) ;
C.31. t41b_cp.m
function T41=t41b_cp ( t ) ;T41=(682.5810/607.7700)∗ t34b_ev ((3∗ pi /2)+(pi /20) )∗ ( Vpotencia ( t )/ Vpotencia (3∗pi /2))^((8/35)+(8∗( t+(pi /20))/(35∗ pi ) ) ) ;
C.32. t41_cp.m
function T41=t41_cp ( t ) ;T41=(621.9412/686.7546)∗ t34_ev (3∗pi/2+(pi /20) )∗ ( p41_cp ( t )/p41_cp (3∗pi /2) )^( (1 .6 − (0 .8∗ ( t+(pi /20))/ pi ) )/ (2 . 6 − (0 . 8∗ ( t+(pi /20))/ pi ) ) ) ;
C.33. v12.m
function V12=v12 ( t ) ;V12=2∗1.005∗ t12b_cv (0 )∗ ( p12b_cv ( t )/p12b_cv ( 0 ) ) ;V12=V12∗( Vcompresion (0)/ Vcompresion ( t ) )^ ( ( 0 . 6 / 1 . 4 )+(0 . 8∗ ( t+(pi /20 ) ) / (1 . 4∗ pi ) ) ) ;
Generador Solar de Ciclo de Aire

426 C.34. V23.M
V12=V12∗(1−(p12_cv ( t )/p12b_cv ( t ) ) ^ ( 0 . 4 / 1 . 4 ) ) ;V12=sqrt (abs (V12 ) ) ;
C.34. v23.m
function V23=v23 ( t ) ;V23=2∗1.005∗ t23b_ep ( ( pi /2 ) )∗ ( p23_ep ( t )/p23_ep (pi / 2 ) ) ;V23=V23∗( Vpotencia (pi /2)/ Vpotencia ( t ) )^ ( ( 0 . 2 / 1 . 4 )+(0 . 8∗ ( t+(pi /20 ) ) / (1 . 4∗ pi ) ) ) ;V23=V23∗(1−(p23b_ep ( t )/p23_ep ( t ) ) ^ ( 0 . 4 / 1 . 4 ) ) ;V23=sqrt (abs (V23 ) ) ;V23=(8.0297/19.9507)∗V23 ;
C.35. v34.m
function V34=v34 ( t ) ;V34=2∗1.005∗ t34b_ev (pi )∗ ( p34_ev ( t )/p34_ev (pi ) ) ;V34=V34∗( Vpotencia (pi )/ Vpotencia ( t ) )^(( −0 .2/1 .4 )+(0 .8∗ ( t+(pi /20 ) ) / (1 . 4∗ pi ) ) ) ;V34=V34∗(1−(p34b_ev ( t )/p34_ev ( t ) ) ^ ( 0 . 4 / 1 . 4 ) ) ;V34=sqrt (abs (V34 ) ) ;V34=V34 ∗ ( 61 . 9369/38 . 2543 ) ;
C.36. v41.m
function V41=v41 ( t ) ;V41=2∗1.005∗ t41b_cp (3∗pi /2)∗ ( p41_cp ( t )/p41_cp (3∗pi / 2 ) ) ;V41=V41∗( Vpotencia (3∗pi /2)/ Vpotencia ( t ) )^( ( −0 .6/1 .4 )+(0 .8∗ ( t+(pi /20 ) ) / (1 . 4∗ pi ) ) ) ;V41=V41∗(1−(p41b_cp ( t )/p41_cp ( t ) ) ^ ( 0 . 4 / 1 . 4 ) ) ;V41=sqrt (abs (V41 ) ) ;V41=V41 ∗ ( 35 . 9620/29 . 2779 ) ;
C.37. Vcompresion.m
t=linspace (0 , pi /2 ) ;for i =1:100
P( i )=p12b_cv ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v12 ( t ( i ) ) ;M( i )=mr12 ( t ( i ) ) ;T( i )=t12b_cv ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )

APÉNDICE C. PROGRAMAS DESARROLLADOS PARA EL MODELO TÉRMICODEL MOTOR 427
plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
C.38. Vpotencia.m
t=linspace (0 , pi /2 ) ;for i =1:100
P( i )=p12b_cv ( t ( i ) ) ;V( i )=Vcompresion ( t ( i ) ) ;v ( i )=v12 ( t ( i ) ) ;M( i )=mr12 ( t ( i ) ) ;T( i )=t12b_cv ( t ( i ) ) ;
endsubplot ( 2 , 2 , 1 )plot (V,P)t i t l e ( ’ P r e s i n−volumen ’ )subplot ( 2 , 2 , 2 )plot ( t ,P)t i t l e ( ’ Pres ion ␣−␣ tiempo ’ )subplot ( 2 , 2 , 3 )plot ( t ,T)t i t l e ( ’ Temperatura−tiempo ’ )subplot ( 2 , 2 , 4 )plot ( t , v )t i t l e ( ’ Velocidad−tiempo ’ )
Generador Solar de Ciclo de Aire

428 C.38. VPOTENCIA.M

Bibliografía
[WIK] http://en.wikipedia.org/wiki/Stirling_engine
[LEW] Gladius Lewis. “Selection of Engineering Materials”. Prentice Hall 1990
[BHA] S. Bhattacharya, E.J. Vesely and V.L. Hill, “High pressure/high temperaturehydrogen permeability in candidate Stirling Engine Alloys”. J. Mater. Energy. Sys.3
[kay] Kays, W. M., London, A.L.. “Compact Heat Exchangers”. Mc Graw Hill. 1964
[cro] Crouthamel, Shelpuk. “Regenerative Gas Cycle Air Conditioning Using SolarEnergy”. Advanced Technology Laboratories. Agosto 1975
[mar] William R. Martini. “Stirling Engine Design Manual”. Second Edition.DoE/NASA/3194-1
429