evolutionary learning of fuzzy models
TRANSCRIPT
1
EVOLUTIONARY LEARNING OF FUZZY MODELS
D.T. Pham
Manufacturing Engineering Centre,
Cardiff University
PO Box 688, Newport Road,
CF24 3TE Cardiff, UK
M. Castellani
CENTRIA - Departamento Informática,
Faculdade Ciências e Tecnologia
Universidade Nova Lisboa
Quinta da Torre,
2829-516 Caparica, Portugal
ABSTRACT
This paper presents an evolutionary algorithm for generating knowledge bases for fuzzy
logic systems. The algorithm dynamically adjusts the focus of the genetic search by
dividing the population into three sub-groups, each concerned with a different level of
knowledge base optimisation. The algorithm was tested on the identification of two
highly non-linear simulated plants. Such a task represents a challenging test for any
learning technique and involves two opposite requirements, the exploration of a large
high-dimensional search space and the achievement of the best modelling accuracy. The
algorithm achieved learning results that compared favourably with those for alternative
knowledge base generation methods.
KEYWORDS : evolutionary algorithms, fuzzy logic, systems modelling, function
approximation.
2
NOTATION:
DA-FFNN differential activation function feedforward fuzzy neural network
EA evolutionary algorithm
EP evolutionary programming
EVS evolution strategy
FL fuzzy logic
FFNN feedforward fuzzy neural network
GA genetic algorithm
KB knowledge base
MF membership function
RB rule base
rand random real number
r.m.s. error root mean square error
t time
u(k) Simulated input of the plant at control step k
y(k) Simulated output of the plant at control step k
σ standard deviation
τ time
3
1 INTRODUCTION
The study of biological nervous systems has shown that accurate and robust mappings
can be achieved by learning appropriate sets of condition-response pairs. Fuzzy logic
(FL) [1] extends the framework of classical Aristotle’s logic to achieve complex input-
output relationships via qualitative fuzzy rules. FL systems are usually implemented
through the Mamdani model [2], which is composed of four blocks, namely the fuzzifier,
the rule base (RB), the inference engine and the defuzzifier [3].
The fuzzifier transforms crisp data into fuzzy sets and is the interface between the
quantitative sensory inputs and the qualitative fuzzy mapping. A fuzzy set is defined via a
membership function (MF) that maps crisp values into fuzzy linguistic knowledge. The
core of the fuzzy system comprises the RB and the inference engine. The RB consists of
fuzzy if-then rules which describe qualitative non-linear relationships through
antecedent-consequent pairs. The inference engine processes the rules and produces the
output in the form of a fuzzy set. The defuzzifier converts the linguistic output into a
crisp value. The RB and the MFs constitute the knowledge base (KB) of the system.
FL systems are a natural candidate for identification of complex non-linear mappings.
Unfortunately, the implementation of fuzzy models has so far been hindered by the lack
of an effective learning algorithm.
4
Evolutionary algorithms (EAs) [4] [5] [6] are a class of global search techniques that
provide an ideal framework for the generation of FL systems. As well as allowing the
simultaneous optimisation of both the KB and the MFs of the solution, EAs only need a
small amount of problem domain expertise for implementation. Moreover, they do not
require properties such as the differentiability of the logic operators, unlike other
optimisation algorithms including the popular error back propagation rule [7].
The main difficulty in the evolutionary design of FL systems is due to the complexity of
the learning task, which requires the optimisation of a large number of mutually related
parameters and variables. The encoding of the fuzzy knowledge base (KB) is not
straightforward and is not suited to traditional string-like implementations. Moreover, the
simultaneous learning of the rule base (RB) and the fuzzy membership functions (MFs)
requires the definition of two different but concurrent learning strategies.
For these reasons, the implementation of evolutionary FL systems has so far relied on ad
hoc solutions, often driven by the particular problem domain. Recently, Pham and
Castellani [8] have introduced a new EA for the automatic generation of KBs for FL
systems. The FL system optimisation problem was approached in a generic manner to
facilitate the application of the results to different problems. The algorithm dynamically
optimises the search efforts allocated for the RB and the MFs optimisation by dividing
the solution population into three sub-groups, each concerned with a different level of
knowledge-base optimisation. Moreover, the evolved KB is expressed in a transparent
format that facilitates the understanding of the control policy.
5
This paper presents the application of the proposed EA to the FL modelling of two
simulated highly non-linear dynamic systems. Such a task represents a challenging test
for any learning technique. The problem involves two opposite requirements, the
exploration of a large high-dimensional search space and the achievement of the best
modelling accuracy.
The paper is organised as follows: Section 2 gives a brief introduction to EAs and
presents a review of the relevant literature on the evolutionary KB generation of FL
systems. Section 3 gives an overview of the algorithm used in this work. Section 4
describes the two simulated plants and the EA implementation. Section 5 presents the
experimental modelling results. Section 6 concludes the paper and proposes areas for
further investigation.
2 EVOLUTIONARY ALGORITHMS FOR TRAINING FUZZY SYSTE MS
2.1 Evolutionary Algorithms
The generation and optimisation of a fuzzy model is essentially a search problem, where
the solution space is represented by all the possible structures and parameters defining the
system. EAs are stochastic search algorithms that aim to find an acceptable solution when
time or computational requirements make it impractical to find the best one.
6
EAs are approximately modelled on Darwin’s theory of natural evolution. This stipulates
that a species improves its adaptation to the environment by means of a selection
mechanism that favours the reproduction of those individuals of highest fitness. The
population is made to evolve until a stopping criterion is met. At the end of the process,
the best exemplar is chosen as the solution to the problem.
In EAs, candidate solutions are encoded into variably complex structures called
chromosomes, which are composed of smaller elements called genes. The gene is the
smallest unit of information and, when defined in a quantised space, each of its allowed
values is called an allele. Following biological terminology, the encoded information
representing a solution is called a genotype, as opposed to the decoded individual that is
named phenotype.
The adaptation of an individual to the environment is defined by its ability to perform the
required task. A problem-specific fitness function is used for the quality assessment of a
candidate solution. The population is driven towards the optimal point(s) of the search
space by means of stochastic search operators inspired by the biological mechanisms of
genetic selection, mutation and recombination (crossover)crossover. Problem-specific
operators are often used to speed up the search process.
Historically, EAs originated in the mid-sixties with two parallel directions of work
leading to the fields of Evolution Strategies (EVSs) [9] [10] and Evolutionary
Programming (EP) [11] [12]. However, it was only ten years later that they gained
7
popularity following the creation of Genetic Algorithms (GAs) by Holland [13] [14] [15].
EVSs, EP and GAs represent different metaphors of biological evolution with different
representations of the candidate solutions and different genetic manipulation operators.
In the last decade, research developments in each field and the mutual exchange of ideas
blurred the boundaries between the three main branches of EAs.
EAs can be used equally for optimising the parameters of the fuzzy system, i.e. the shape
and location of the MFs and the fuzzy rule weights, or for the acquisition of the structure
of the system, i.e. the number of input and output MFs and the fuzzy RB, or for the
simultaneous generation of both. The last case is the most interesting because it requires
the least knowledge about the problem domain and it eliminates the possibility of
obtaining sub-optimal solutions related to the initial design assumptions.
2.2 EAs for concurrent membership functions and rule base learning
There are two ways of evolving the KB of fuzzy systems that have originated from earlier
studies in the broader field of Learning Classifier Systems. The Pittsburgh or “Pitt”
approach introduced by the work of Smith [16] at the University of Pittsburgh evolves the
final KB from a population of rule sets. The Michigan approach originated by the work of
Holland and Reitman [17] at Michigan University generates the optimal rule set from a
population of fuzzy rules.
8
The Pitt approach determines a more disruptive search strategy and it seems to be more
useful for off-line environments in which more radical behavioral changes are acceptable.
The use of the Pitt approach in on-line and real-time environments is also problematical
because of the difficulty of replicating the same operating conditions for the entire
population of fuzzy systems.
The Michigan approach seems to be more useful in on-line and real-time environments in
which fast evaluations are required. However, the Michigan approach is conceptually
more complex as some mechanism must be introduced to solve the credit assignment
problem between firing rules. The final outcome of the action of the fuzzy system is in
fact often the result of cooperation between competing rules.
One of the first studies into automatic optimisation of both fuzzy RB and MFs is reported
in [18]. The paper proposed a Michigan-type fuzzy learning classifier system where each
solution was encoded using a set of values defining the central point of the input and the
output MFs. The population size determined the size of the final RB.
Lee and Takagi [19] proposed a combination of FL and evolutionary techniques for the
dynamic control of GA parameters. The resulting adaptive GA was applied to the
automatic generation of the KB of a fuzzy controller for the inverted pendulum problem.
Kinzel et al. [20] used a two-step procedure for the automatic optimisation of the RB and
the MFs of a FL control system. An EA was first run to define an initial coarse policy via
9
optimisation of the fuzzy RB. After the initial step, the system was finally tuned via GA-
optimisation of the fuzzy MFs. Because of the two-step procedure adopted, the algorithm
was prone to converging to sub-optimal solutions. Two cascaded GAs were also
proposed by Heider and Drabe [21] to evolve the RB and MFs of FL systems.
Buckles et al. [22] suggested a Pitt-based fuzzy learning classifier system [16] where the
RB and the fuzzy MFs were simultaneously evolved. Data categories were clustered
using ellipsoidal MFs. Variable-length genotypes were used to encode each solution by
concatenating the encodings of the singular ellipses. Cooper and Vidal [23] proposed a
similar algorithm for the simultaneous optimisation of the RB and MFs of FL systems.
Liska and Melsheimer [24] used a three-chromosome genotype for the encoding of FL
systems. The algorithm included a final gradient-descent optimisation stage for the fine
tuning of the MFs. Ng et al. [25] [26] employed a modified GA for the optimisation of
FL controllers. In this implementation, the number of MFs and the size of the RB were
fixed and not subjected to evolution. A similar algorithm was also designed by Homaifar
and McCormick [27] and Nandi and Pratihar [28].
Shi et al. [29] designed an adaptive EA for fuzzy learning classifier syastems. The
crossover and mutation rates were tuned on-line during the genetic search, the adaptation
law being defined by a set of heuristic fuzzy rules. Solutions are encoded into integer-
based fixed-length strings defining the fuzzy rules and the shapes and ranges of the MFs.
Each rule is defined by the labels of the condition and the action terms, with a ‘don’t
10
care’ allele to mark irrelevant terms. A specific gene determines the maximum number of
rules in the RB and only rules up to that number will be decoded into the phenotype. The
ability genetically to determine the shape of each single MF and the fuzzy adaptation of
the crossover and mutation rates were the interesting features of this algorithm. On the
other handHowever, it should be noted that the RB encoding scheme is likely to generate
a sizeable amount of unused genetic material. This unwanted information will still be
processed by the EA, thus taking computational resources from the genetic search.
Moreover, pre-setting the size of the RB is a risky operation, as it may produce a sub-
optimal solution.
Pre-setting some of the parameters defining the final solution and adopting a “divide-and-
conquer” approach where learning is carried out at different stages are common solutions
to the problem of evolutionary FL system generation. As noted above, these approaches
can lead to sub-optimal solutions. Moreover, the setting of the parameters may require a
certain amount of expertise and a lengthy trial-and-error phase. On the other hand,
approaches tending to enhance the power of the learning algorithm to deal with the
complexity of FL learning (e.g., [19]) often result in very complex systems with long
running times and poorly understood dynamics.
3 PROPOSED EVOLUTIONARY ALGORITHM
In its present configuration, the algorithm is designed for the generation of Mamdani-type
FL systems through simultaneous evolution of both the rule base (RB) and MFs. The
11
adopted evolution scheme is close to the Pitt approach, where a population of FL systems
is the object of the optimisation process. As discussed above, such approach is better
suited to the case of off-line system modelling. Moreover, for the Michigan approach to
be applied to the simultaneous optimisation of the RB and the MFs, a distinct set of
condition and action terms must be associated with each fuzzy rule. This situation should
be avoided as it affects the transparency of the fuzzy KB.
The shape of the fuzzy MFs has been fixed to be a trapezoid and is not subjected to
learning. To increase KB transparency, no rule confidence factors are used in the fuzzy
inferencing. For the sake of generality, their representation was included in the genome
of the rules. Their value is set to one (i.e. full confidence, no action scaling) and it is left
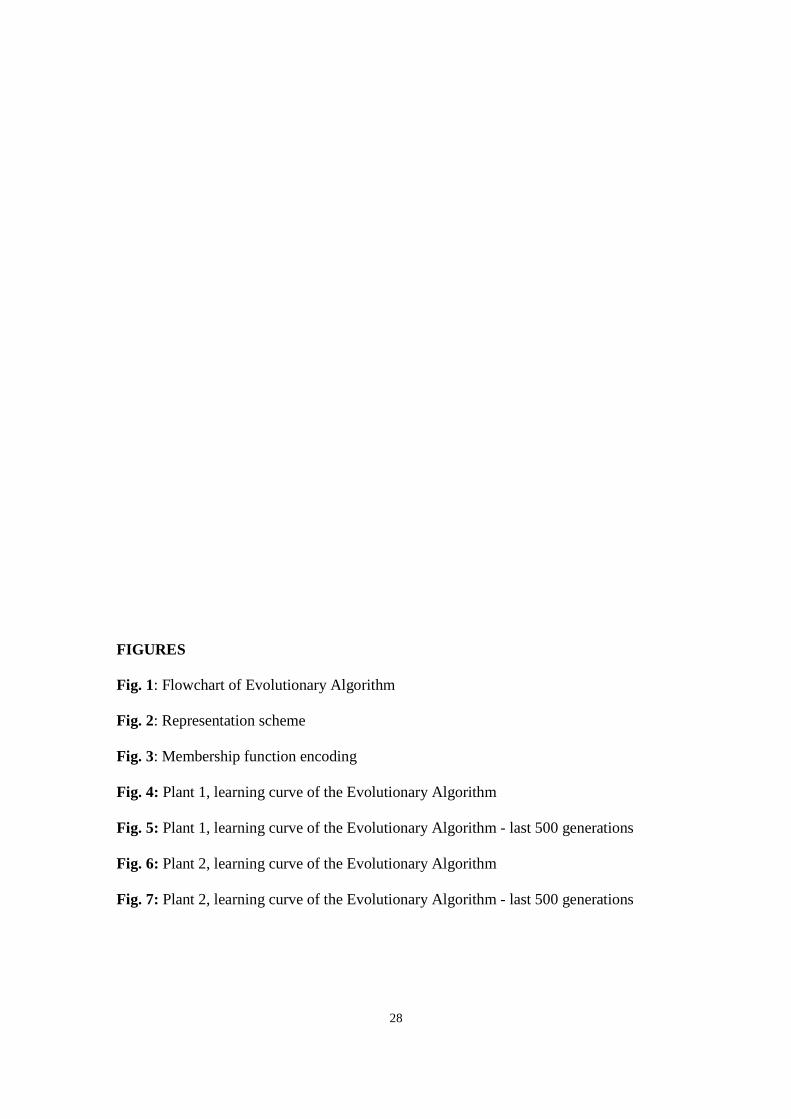
unchanged by the evolutionary procedure. A flowchart of the algorithm is given in Fig. 1.
The algorithm uses the generational replacement reproduction scheme [30], a new
selection operator [31] and a set of recombination and mutation procedures [30] dealing
with different elements of the fuzzy KB to evolve a population of FL systems. Each of
the recombination operators behaves as a two-point crossover operator [4], cutting and
pasting information defined into hypercubes of the input-output characteristic.
The algorithm uses the generational replacement reproduction scheme [30], a new
selection operator [31] and a set of crossover and mutation procedures [30] dealing with
different elements of the fuzzy KB to evolve a population of FL systems. The population
is divided into three sub-groups to which different operators are applied. A specific
integer-valued gene marks the species of each individual.
12
As previously mentioned, there are three ways of modifying the overall fuzzy mapping:
by manipulating the input and output partitions, by changing the control policy and by
performing simultaneously both operations. Accordingly, the population is divided into
three sub-groups to which the different operators are applied. A specific integer-valued
gene marks the species of each individual.
The genetic operators acting on the first sub-population work at the level of input and
output fuzzy partitions. The aim of the recombination operator is to redistribute the genes
amongst the population, looking for the most successful assembly. In this case, crossover
generates two new individuals by mixing the MFs of the two parents for each variable.
Crossover generates two new individuals by mixing the MFs of the two parents for each
variable. Each parent transmits its RB to one of the offspring. Random chromosomic
mutations can create new fuzzy terms, delete existing ones, or change the parameters
defining the location and shape of a MF. Whenever genetic manipulations modify the set
of MFs over which a RB is defined, a ‘repair’ algorithm translates the old rule conditions
and actions into the new fuzzy terms. The sub-population of fuzzy systems undergoing
this set of operations is called species_1.
The operators manipulating the second sub-population search for the optimal RB. Genetic
crossover creates two individuals by exchanging sets of rules between the two parents.
The aim of this operator is to build better performing solutions by assembling blocks of
good quality rules from the parents chromosomes. Each of the offspring inherits the input
and the output space partitions from one of its parents. The mutation operator randomly
13
changes the action of a fuzzy rule. To accommodate the new partitions, the conditions
and actions of the swapped rules are translated into new linguistic terms. The mutation
operator randomly changes the action of a fuzzy rule. This group of solutions is named
species_2.
The operators acting on the third sub-population deal with all the components of the
fuzzy KB. Genetic recombination swaps all the MFs and the rules contained in a
randomly selected portion of the input and output spaces. Mutation can take any of the
forms defined for the modification of species_1 and species_2 genotypes. This third
group of individuals is referred to as species_3.
Each of the sub-populations is used to perform a different search in the space of possible
solutions. species_1 is mainly concerned with fine tuning the fuzzy response, while the
other two species are used for increasingly more disruptive search approaches.
Information is naturally exchanged between different sub-populations through genetic
recombination which is not forbidden or strictly regulated as in ordinary niching
techniques [32]. When two individuals of different kinds are mated, the fitter solution
dominates the other, determining the species of the offspring and the type of crossover
applied. This mechanism adds a bias towards the most successful search approach.
Competition for survival is increased among the whole population of individuals, a
feature that also differs from many niching approaches.
14
A species mutation operator prevents one type of individual from taking over the entire
population. Its action has the double purpose of allowing the resurgence of temporarily
suppressed species and spreading useful genetic material over the three population
groups. The possibility of reinstating declining species allows the adaptive adjustment of
the search strategy. As an example, at the beginning of the optimisation process it may be
preferable to focus the search efforts at the RB level for a quick broad-brush definition of
the behaviour of the system. At a later stage, the fine tuning of the response may require
more computational resources to be allocated at the level of MFs optimisation.
It is important to point out that the separation of the population into three sub-groups is
aimed at the dynamic adjustment of the focus of the genetic search towards different KB
elements. In contrast with other niching techniques, the division of the population into
species is not aimed at sustaining population diversity, which is instead pursued through
the conventional balance of selection pressure and genetic mutations. Because of this
fundamental difference, the proposed algorithm cannot be regarded as adopting a
conventional niching technique.
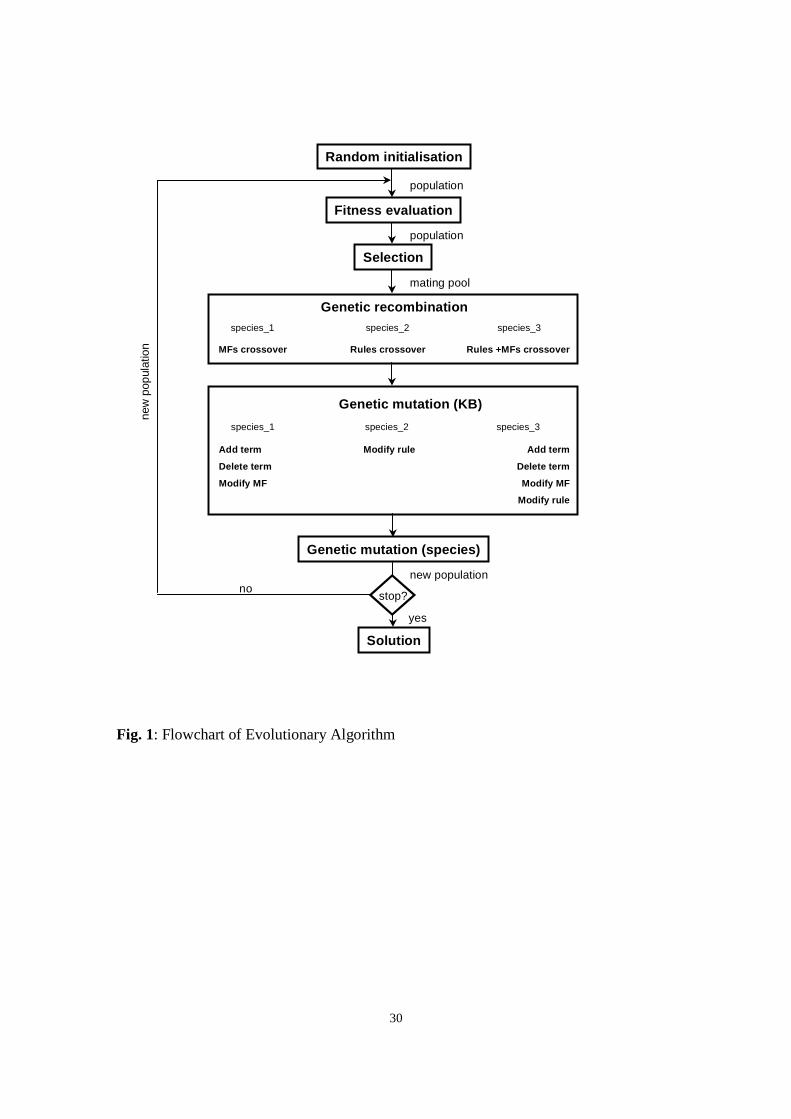
The algorithm represents candidate solutions using multi-chromosome variable-length
genotypes. Fig. 2 gives an example of an encoded solution for a FL system having three
input variables, each partitioned into three linguistic terms, and one output variable
partitioned into five fuzzy terms.
15
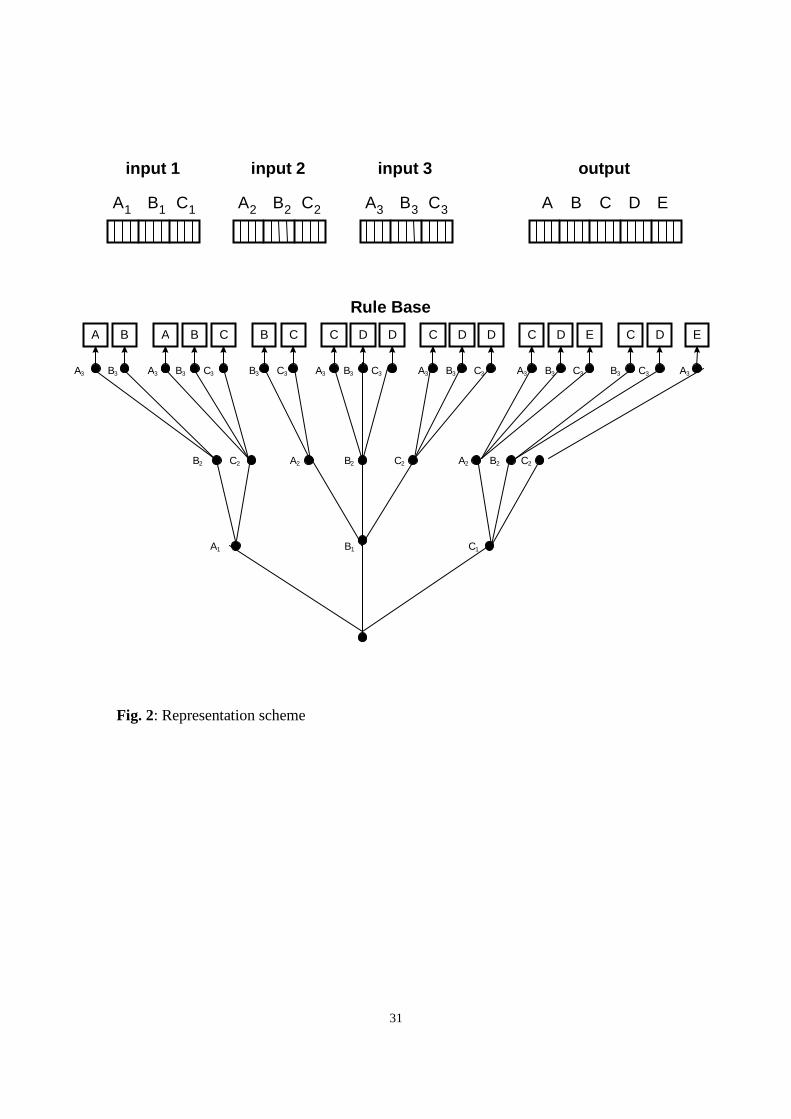
A separate chromosome is used to describe the partition of each input and output
variable, each chromosome being composed of a number of genes equal to the number of
linguistic terms. Each gene is a real-valued string encoding the parameters defining the
location and the shape of one MF. Fig. 3 details the MF encoding scheme.
The fuzzy RB is represented as a multi-level decision tree, the depth of the tree
corresponding to the dimensionality of the input space. The rule antecedent is encoded in
the full path leading to the consequent, each node being associated with a rule condition.
The nodes at the last level of the decision tree represent the rule consequent and contain a
fuzzy action for each output variable.
4 FUZZY MODELLING OF NON-LINEAR PLANTS
Two tests were performed aimed at measuring the ability of the proposed algorithm to
solve complex identification problems. Even though limited in their scope, the
investigation was expected to provide further evidence of the effectiveness and
robustness of the proposed EA.
4.1 Simulated Plants
The tests involved the modelling of two simulated highly non-linear dynamic systems.
The accuracy of the evolutionary FL model was compared by replicating the experiments
using a Differential Activation Function Feedforward Fuzzy Neural Network (DA-
FFNN) [33], a modified version of the popular FFNN by [34] [35] which automatically

16
tunes the fuzzy MFs via error back propagation. Compared to its predecessor, the DA-
FFNN allows a more precise backpropagation of the error information during the learning
phase, achieving higher modelling accuracy. The RB of the DA-FFNN was created using
the inductive rule extraction method of [36] while the number of fuzzy MFs is a system
parameter. For the sake of completeness, the first experiment also includes the modelling
results obtained using Lin’s and Lee’s original MF tuning procedure.
In the first test, the evolutionary FL system was required to model the non-linear dynamic
plant represented by the following equations:
[ ]2)(1)(1
)(11)(1)(2)(1)()(1)(
22 −+−+
+−−⋅−⋅−⋅−⋅=+tyty
tutytutytytyty (1)
( )
≤≤
⋅⋅⋅+
⋅⋅⋅
≤
⋅⋅
=800500
25π2
sin 2.0250π2
sin8.0
500 250π2
sin
ttt
tt
tu (2)
where u(t), u(t-1), y(t), y(t-1) and y(t-2) are the input signals and the prediction of y(t+1)
is the plant output. The EA and the DA-FNN were trained on input patterns generated in
the time interval [0, 500] and tested on the perturbed pattern of interval [500, 800], where
a higher frequency component was added to the original input signal.
The simulated plant chosen for the second modelling task is described by the following
equations:

17
( ) ( ) ( )( ) ( ) ( ) ( )( ) ( )( )( )f y t e y t e y tyy t y t y t y t= − ⋅ ⋅ − + ⋅ − ⋅ + ⋅ ⋅− ⋅ − ⋅08 05 03 09 1 01. . . . . sinπ (3)
( ) ( ) ( ) ( ) ( ) ( )( )y t u t u t u t u t u t f y+ = ⋅ ⋅ + ⋅ ⋅ − + ⋅ − ⋅ − + ⋅1 0 755 05 082 1 0 22 1 2 0 3. . . . . (4)
( )u t rand= ⋅08. (5)
where u(t), u(t-1), u(t-2), y(t) and y(t-1) are the input signals, the prediction of y(t+1) is
the system output and rand is a random number in the interval [0,1]. In this case, the
comparison of the FL models was based on 20 randomly generated input-output patterns
of the simulated system.
4.2 Algorithm Implementation
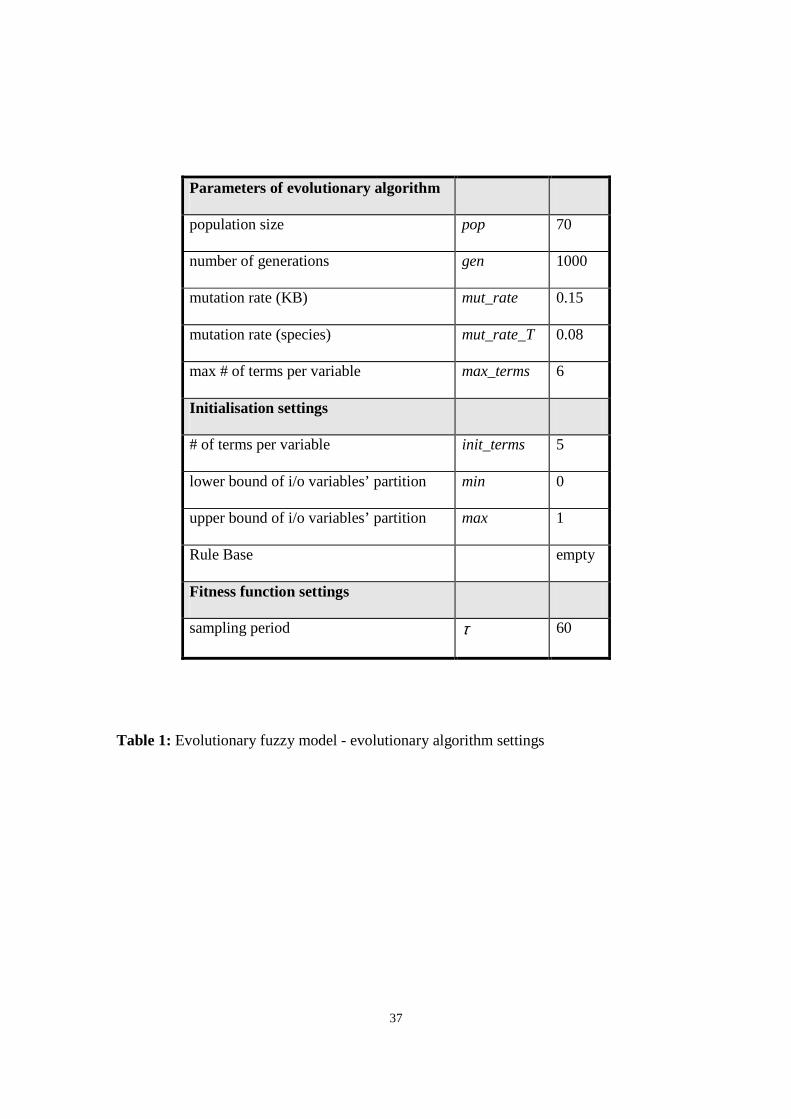
Experimental evidence suggested the same set of EA parameters and initialisation
settings could be used for both learning tasks. They are given in Table 1.
To prevent the generation of infeasible fuzzy rules, the starting population was initialised
with a blank RB. During the fitness evaluation phase, all candidate solutions were tested
for a certain number of time steps. At each step, a solution determined the set of fuzzy
actions by searching its fuzzy decision tree for paths whose nodes were contained in the
set of input conditions. In general, not all combinations of fuzzy conditions would lead to
an existing rule action. At each time step, the proposed algorithm created a new path in
the fuzzy decision tree if the set of input conditions having the highest matching degree
18
did not result in a valid action. The rule consequent was randomly determined. The aim
of the procedure was to limit the RB growth only to the most relevant instances. This
feature allowed the creation of a minimal set of fuzzy rules but also emphasised the
importance of the training procedure.
To curb the combinatorial explosion in the number of control rules further, a maximum
of 6 linguistic terms per universe of discourse was set, this figure still allowing the
generation of solutions possessing up to almost 104 fuzzy rules.
The fitness of the candidate solutions was evaluated as a measure of their root mean
square (r.m.s.) modelling error over a randomly chosen time window of 60 steps. This
value reprented a good compromise between sampling accuracy and running time.
5 RESULTS
This section presents the results of the evolutionary learning of fuzzy models for the two
plants.
5.1 Plant 1 – Learning results
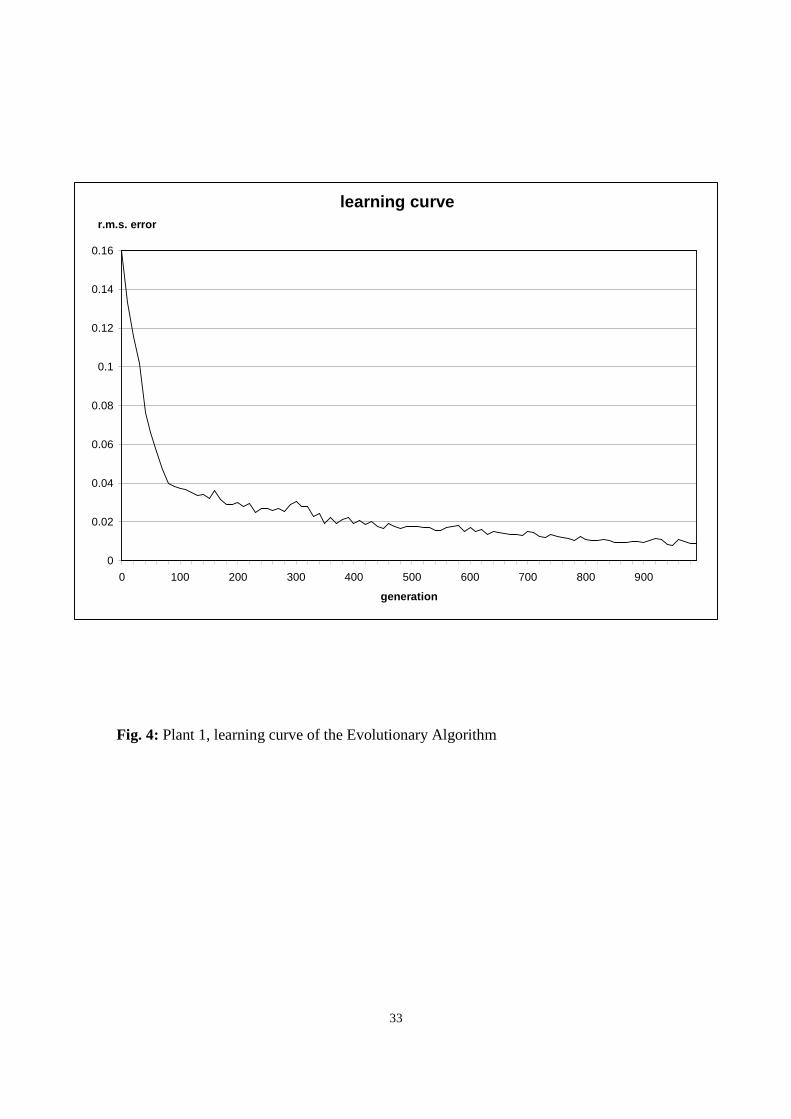
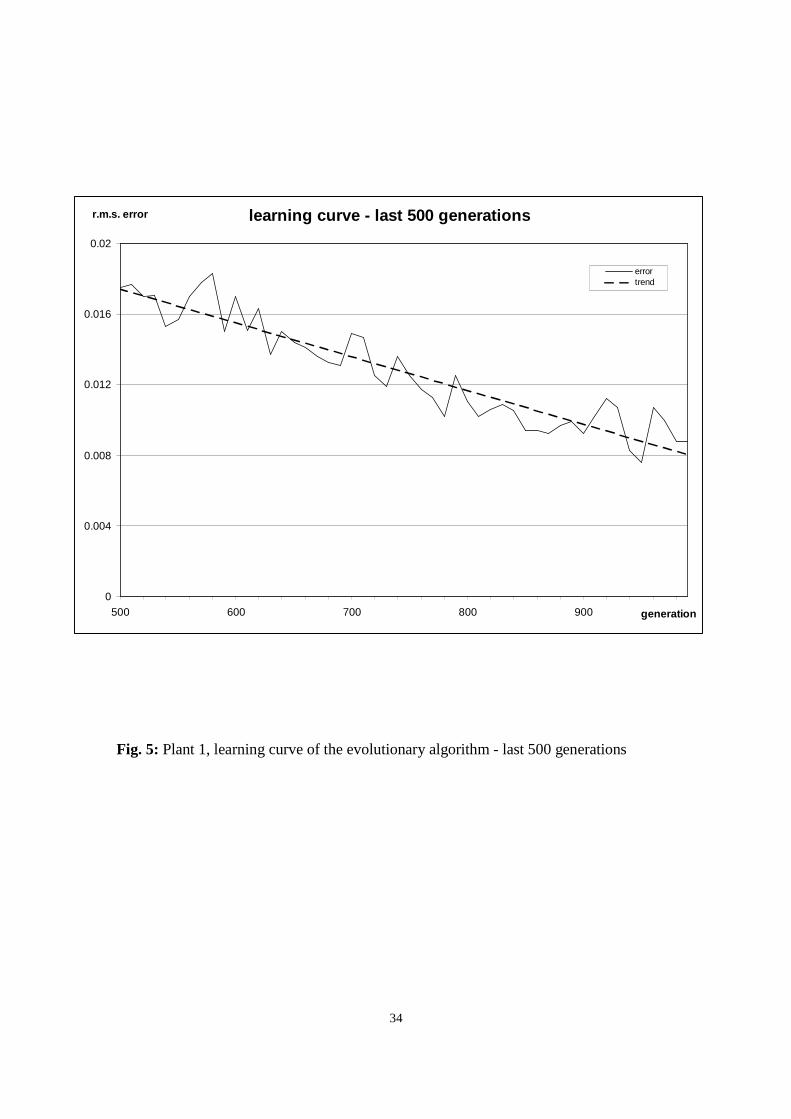
Fig. 4 shows the evolution of the average r.m.s. error of the population over the training
period. Fig. 5 focuses on the last 500 generations of the evolution period to highlight the
ongoing improvement of the performance of the population.
19
The steadiness of the learning reflects a good selection pressure after the initial large
improvement in performance. On the other hand, aAs evolution progressed, the candidate
solutions were gathering additional experience and the initially empty RB was
progressively filled. Therefore, the second half of the evolution period was the more time
consuming as more complex solutions were processed. Considering the magnitude of the
improvement during the last 500 generations, if the highest precision is not required, by
terminating the search earlier the running time of the algorithm could be drastically
reduced.
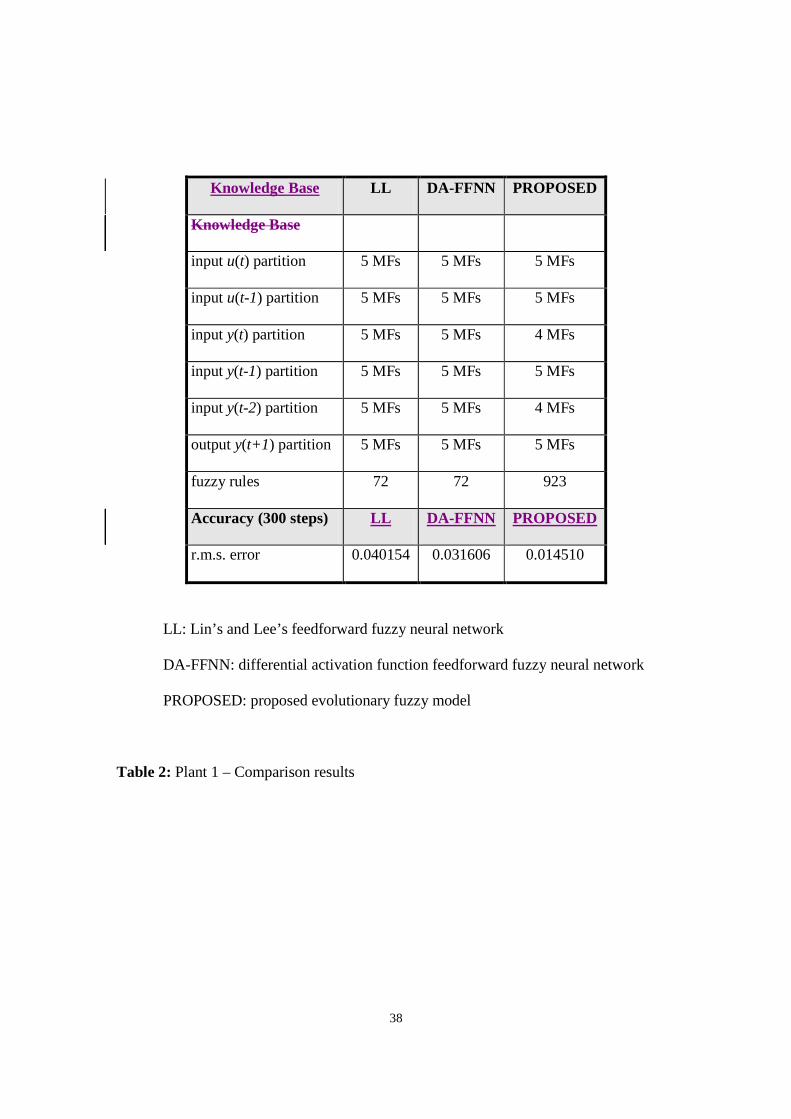
The results of the comparison are reported in Table 2 and clearly show the superior
modelling accuracy of the EA-generated fuzzy model. In particular, the measured r.m.s.
error is half of that for the DA-FFNN and three times smaller than for Lin’s and Lee’s
original FFNN, confirming the effectiveness of the proposed learning technique.
5.2 Plant 1 – Complexity of FL model
The EA-generated KB is considerably more complex, containing one order of magnitude
more rules than the induction-generated counterpart. Different reasons could explain this
dramatic difference. Besides the fact that a more precise mapping necessarily requires a
more detailed description of the approximated function, it should be noted that the size of
the RB of the DA-FFNN is partly controlled by the manual initialisation of the input and
output space partition. The inductive learning algorithm was therefore run on fuzzy space
partitions roughly tailored for a certain KB size. The freedom of the EA to organise its
own input and output spaces therefore brings a superior modelling accuracy and reduced

20
design effort at the expense of a larger RB. At the same time, it should be remembered
that no selection pressure has been exerted to evolve the most compact solution.
The setting of a maximum number of terms per universe of discourse and the allocation
of mutation probabilities that favour the reduction of fuzzy terms contribute to a degree
of control on the size of the KB. Also the rule generation procedure serves the same
purpose. Nonetheless, these methods are rather indirect ones. Following genetic
manipulations, the boundaries of some fuzzy rules may shift to areas of unfeasible input
signals, or redundant fuzzy rules and terms may be generated [37]. In those cases, a
simplification of the KB would increase the transparency of the control policy. On the
other hand, it is debatable up to which point the mapping of a five-input fuzzy system can
be transparent.
Yet, the size of the EA-generated FL system did not appear to slow the response time
down appreciably. Unless otherwise required by specific hardware or software
limitations, in case of highly dimensional complex mapping problems, focusing on the
transparency of an EA-generated KB is not likely to pay back. Where this feature was
required, it would be worthwhile investigating the possibility of introducing some EA
inspection routine with the purpose of pruning redundant fuzzy terms and rules. The
computational time allocated to this operation could be regained by the subsequent
simplification of the genetic manipulation operations.
5.3 Plant 2 – Learning results
21
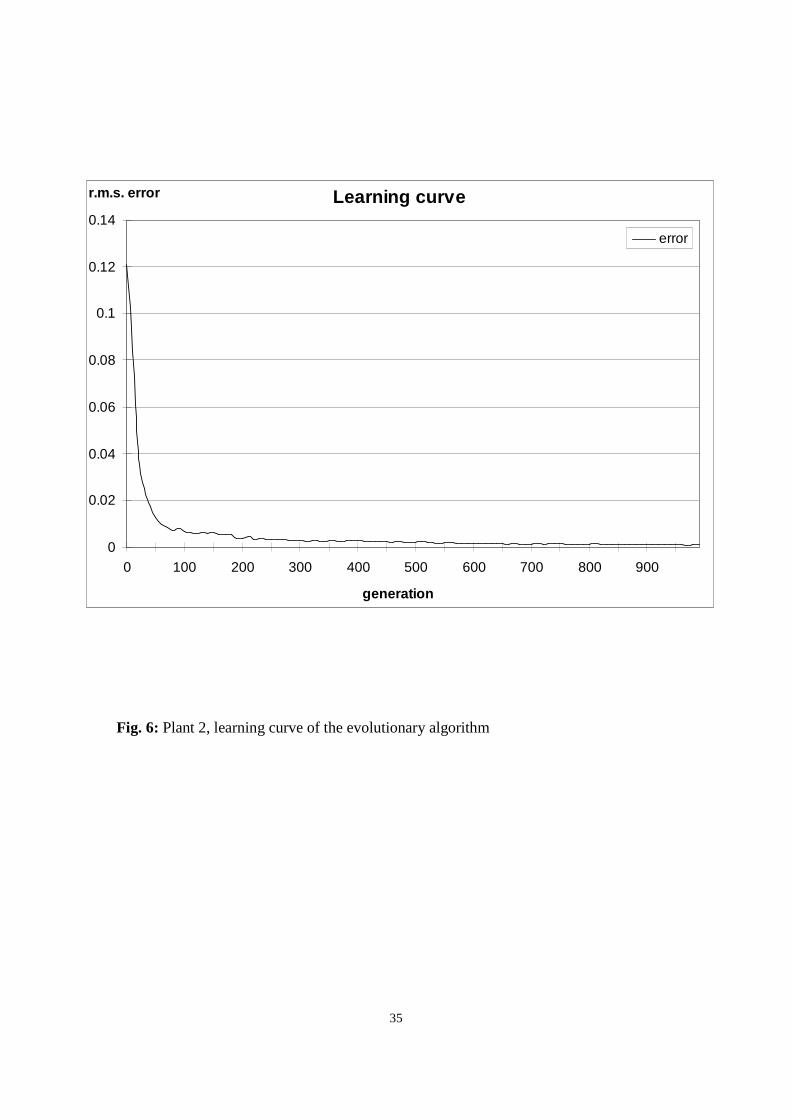
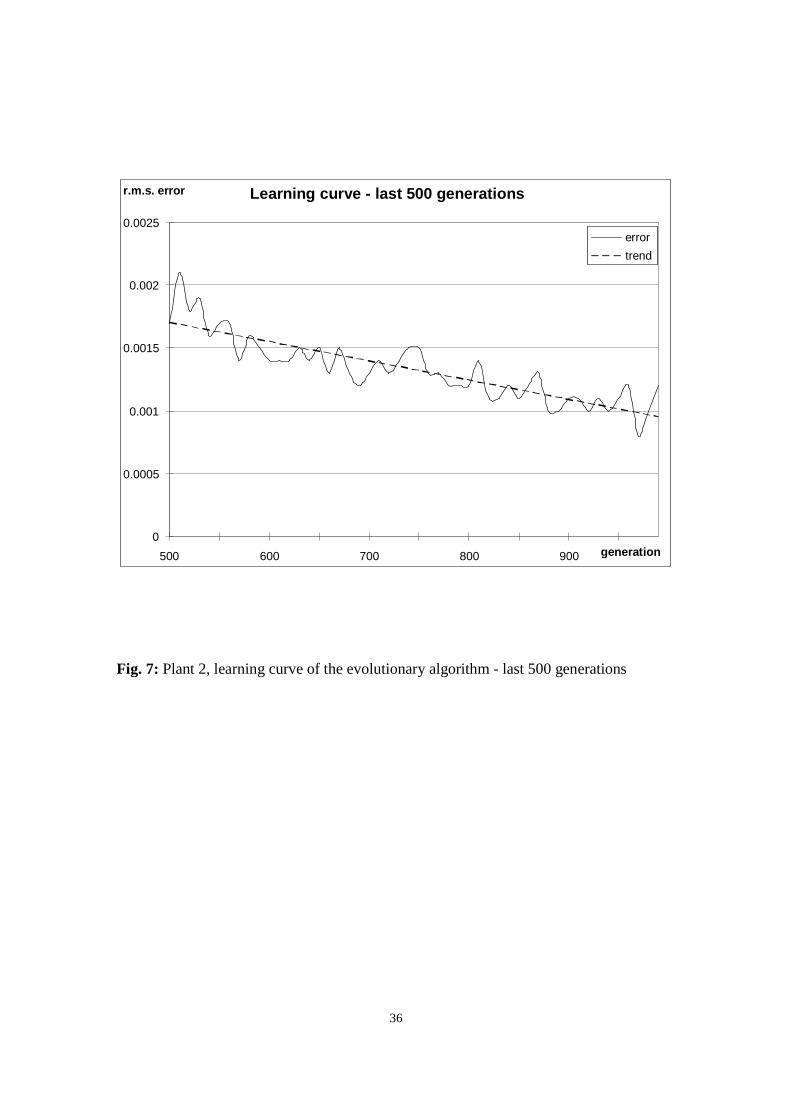
The second experiment almost replicates the results obtained in the previous one. Fig. 6
shows the evolution of the average r.m.s. error of the population over the training period
while Fig. 7 focuses on the last 500 generations. The results of the comparison are
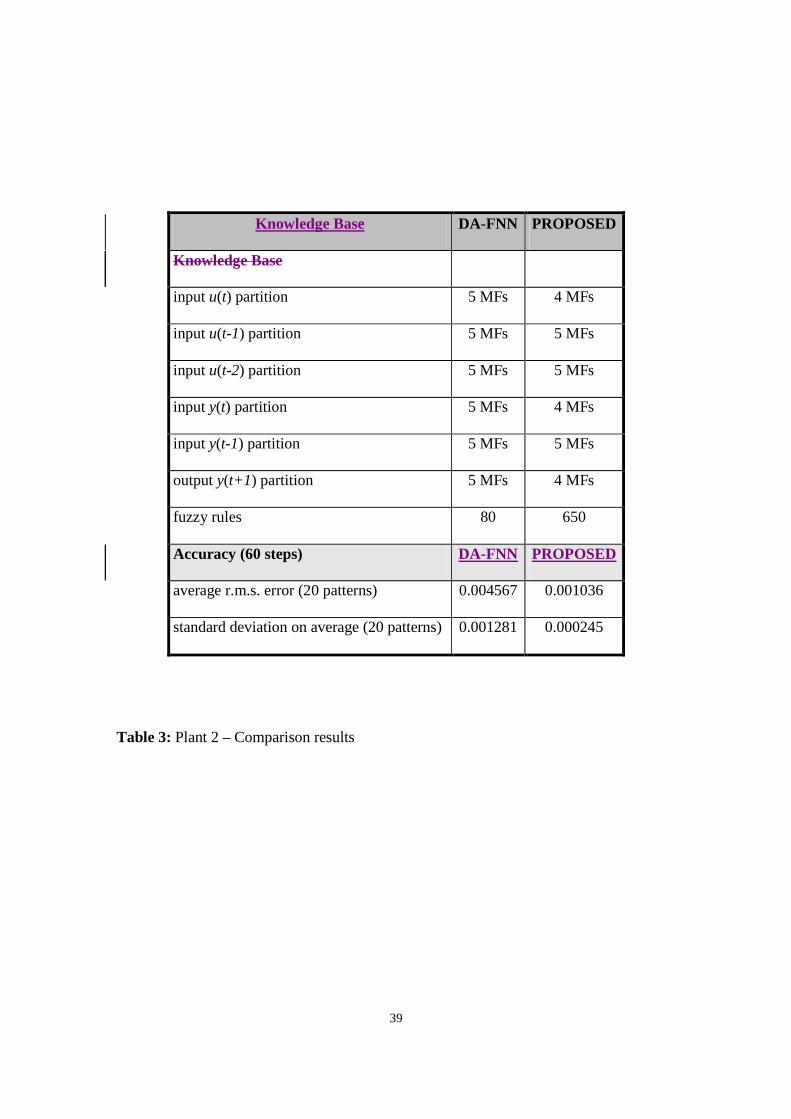
presented in Table 3.
The difference in accuracy compares here even more favourably for the proposed
algorithm which achieved a r.m.s. error measure four times smaller than the DA-FFNN.
The steeper learning curve in the first hundred generations and the smaller r.m.s.
modelling error obtained by the final solutions suggests the behaviour of the second
simulated plant was more easy to model for the FL learning algorithms.
The comparison also shows the EA technique obtaining more robust generalisation
results. The ratio between the average r.m.s. error and its standard deviation over the 20
randomly generated test patterns is in fact 0.2 for the evolutionary FL system and 0.28 for
the DA-FFNN.
Comparing the results of Table 3 with the plot of Fig. 7 shows that the performance of the
final solution is very close to the average accuracy of the population towards the end of
the search. This suggests the population is very near to convergence at that stage of the
evolution. The steadiness of the learning in the population despite the almost uniform
performance of the individuals therefore gives further evidence of the effectiveness of the
proposed selection routine. This observation was not possible in the previous experiment
as the sampling periods were different from the learning to the test phase.
22
5.4 Plant 2 – Complexity of FL model
The second experiment confirms the findings of the previous one. The size of the EA-
generated RB is smaller that the one generated in the previous modelling test. Still, it is
about 8 times larger than the corresponding one generated via rule induction for the DA-
FFNN.
The smaller size of the second EA generated KB could also provide further evidence that
the second plant was easier to model. On the other hand, it should be noted that the size
of the EA-generated KBs could vary substantially between different runs of the same
experiment. Often the size of the fluctuations in KB size was not reflected by significant
variations in performance. This supports the above formulated hypothesis of the presence
of a number of redundant fuzzy rules in the automatically generated KB.
6 CONCLUSIONS AND FURTHER WORK
A novel evolutionary technique was presented for the automatic generation of KBs for
FL systems. The algorithm was tested on two different system identification tasks, each
involving the modelling of a highly non-linear dynamic plant.
The experiments gave the opportunity of further assessing the effectiveness and
limitations of the proposed technique. The overall evaluation of the EA based on the tests
23
conducted is positive. In both cases, the algorithm achieved learning results that
compared favourably with alternative KB generation methods.
On the other hand, the algorithm probably did not evolve solutions in their most
economical representation. Experimental evidence suggests the KB developed in the
system modelling experiments were probably simplifiable. It should be noted, however,
that the current EA prototype has not been explicitly designed to optimise the
compactness of solutions.
Further work should mainly address the simplification of the KB, introducing automatic
pruning routines to cut down the size of the RB. Those routines could, for instance, focus
on merging homogeneous areas of the fuzzy response map or pruning fuzzy rules that
evolution has made obsolete or infeasible.
ACKNOWLEDGEMENTS
This research was sponsored by Hewlett-Packard and the Welsh Assembly Government
under the European Regional Development Fund programme and by the EC FP6
Network of Excellence on Innovative Production Machines and Systems (I*PROMS).
REFERENCES
[1] Zadeh, L. A. (1965), Fuzzy Sets, Information and Contr., Vol. 8, pp. 338-353.
24
[2] Mamdani, E. H. (1974), Application of fuzzy algorithms for control of simple
dynamic plant, Proc. IEE, Vol. 121 No. 12, pp. 1585-1588.
[3] Lee, C. C. (1990), Fuzzy logic in control systems: fuzzy logic controller, Part I &
Part II, IEEE Trans. Syst. Man and Cyb., Vol. 20, n. 2, pp. 404-418 & 419-435.
[4] Fogel, D. B. (2000), Evolutionary Computation: Toward a New Philosophy of
Machine Intelligence, 2nd ed., IEEE Press, New York.
[5] Eiben, A.E. and Smith, J.E. (2003), Introduction to evolutionary computing,
Springer, New York.
[6] Coello, C. A. C., Van Veldhuizen, D. A., Lamont, G. B. (2002), Evolutionary
Algorithms for Solving Multi-Objective Problems (Genetic Algorithms and
Evolutionary Computation), Plenum, New York.
[7] Rumelhart, D. E. and McClelland, J. L. (1986), Parallel Distributed Processing:
Exploration in the Micro-Structure of Cognition , Vol. 1-2, Cambridge, MIT
Press.
[8] Pham, D.T. and Castellani, M. (2002), Outline of a New Evolutionary Algorithm
for Fuzzy Systems Learning, Proc. IMechE, Part C, Vol. 216, No. 5, pp. 557-570.
[9] Rechenberg, I. (1965), Cybernetic Solution Path of an Experimental Problem,
Royal Aircr. Establ., libr. Transl., 1122, Farnborough, Hants UK.
[10] Arnold, D.V. (2002), Noisy Optimisation with Evolution Strategies, Kluwer
Academic Publishers, Boston, MA.
[11] Fogel, L. J., Owens A. J. and Walsh, M. J. (1966), Artificial Intelligence through
Simulated Evolution, Wiley, New York.
25
[12] Fogel, D. B. (1992), An Analysis of Evolutionary Programming, Proc. First Int.
Conf. on Ev. Progr., 1992, pp. 43-51.
[13] Holland, J. H. (1975), Adaptation in Natural and Artificial Systems, Ann Arbor,
MI: University of Michigan Press.
[14] De Jong, K. A. (1975), An Analysis of the Behaviour of a Class of Genetic
Adaptive Systems, Ph.D. thesis, Univ. of Michigan, Ann Arbor, MI.
[15] Gao, W. (2004), Comparison study of genetic algorithm and evolutionary
programming, Proc. 2004 Int. Conf. on Machine Learning and Cybernetics, Vol. 1,
pp. 204-209.
[16] Smith, S. F. (1980), A Learning System Based on Genetic Adaptive Algorithms,
Ph.D. thesis, Department of Computer Science, University of Pittsburgh, PA, 1980.
[17] Holland, J. H., Reitman, J. S. (1978), Cognitive Systems Based on Adaptive
Algorithms , In: D.A. Waterman, F. Hayes-Roth (Eds), Pattern-Directed Inference
Systems. New York, Academic Press.
[18] Parodi, A. and Bonelli, P. (1993), A New Approach to Fuzzy Classifier Systems,
Proc. 5th Int. Conf. on GAs and Appl., Urbana IL - 1993, pp. 223-230.
[19] Lee, M. A. and Takagi, H. (1993), Dynamic Control of Genetic Algorithms
Using Fuzzy Logic Techniques, Proc. 5th Int. Conf. on GAs and Appl., Urbana IL -
1993, pp. 76-83.
[20] Kinzel, J., Klawonn, F. and Kruse, R. (1994), Modifications of Genetic
Algorithms for Designing and Optimising Fuzzy Controllers, Proc. First IEEE
Conf. on Ev. Comp. (ICEC), Orlando FL - 1994, pp. 28-33.
26
[21] Heider, H. and Drabe, T. (1997), Fuzzy System Design with a Cascaded Genetic
Algorithm , Proc. IEEE Int. Conf. on Ev. Comp., Indianapolis IN - 1997, pp. 585-
588.
[22] Buckles, B. P., Petry, F. E., Prabhu, D., George, R. and Srikanth, R. (1994), Fuzzy
Clustering with Genetic Search, Proc. First IEEE Conf. on Ev. Comp. (ICEC),
Orlando FL - 1994, pp. 46-50.
[23] Cooper, M. G. and Vidal, J. J. (1994), Genetic Design of Fuzzy Controllers: the
Cart and Jointed-Pole Problem, Proc. 3rd IEEE Int. Conf. on Fuzzy Syst.,
Piscataway NJ - 1994, Vol. 2, pp. 1332-1337.
[24] Liska, J. and Melsheimer, S. S. (1994), Complete Design of Fuzzy Logic Systems
Using Genetic Algorithms, Proc. 3rd IEEE Int. Conf. on Fuzzy Syst., Piscataway
NJ - 1994, Vol. 2, pp. 1377-1382.
[25] Ng, K. C. and Li, Y. (1994), Design of Sophisticated Fuzzy Logic Controllers
Using Genetic Algorithms, Proc. First IEEE Conf. on Ev. Comp. (ICEC), Orlando
FL - 1994, pp. 1708-1712.
[26] Ng, K. C. and Li, Y., Murray-Smith, D. J. and Sharman, K. C. (1995), Genetic
Algorithms Applied to Fuzzy Sliding Mode Controller Design, Proc. GALESIA
First IEE/IEEE Int. Conf. on GAs in Eng. Syst.: Innovations and Appl., Sheffield
UK - 1995, pp. 220-225.
[27] Homaifar, H. and Mc Cormick, E. (1995), Simultaneous Design of Membership
Functions and Rule Sets for Fuzzy Controllers Using Genetic Algorithms, IEEE
Trans. on Fuzzy Syst., Vol. 3, No. 2, pp. 129-139.
27
[28] Nandi, A. K., Pratihar, D. K. (2004), Automatic design of fuzzy logic controller
using a genetic algorithm - To predict power requirement and surface finish in
grinding , J. of Materials Processing Techn., Vol. 148, No. 3, pp. 288-300.
[29] Shi, Y., Eberhart R. and Chen, Y. (1999), Implementation of Evolutionary Fuzzy
Systems, IEEE Trans. on Fuzzy Syst., Vol. 7, No. 2, pp. 109-119.
[30] Davis, L. (1991), Handbook of Genetic Algorithms, Van Nostrand Reinhold, New
York.
[31] Pham, D.T. and Castellani, M. (2005), A New Adaptive Selection Routine For
Evolutionary Algorithms , submitted to Proc. IMechE, Part C.
[32] Mahfoud., S. W. (1995), A comparison of parallel and sequential niching
methods, Proc. 6th Int. Conf. on GAs and Appl., Pittsburgh PA - 1995, pp. 136-143.
[33] Shankir, Y. (2000), Modified feedforward FNN with differential activati on
functions, Ph.D. thesis, Univ. of Wales, Cardiff UK.
[34] Lin, C. T. and Lee, C. S. (1991), Neural-network-based fuzzy logic control and
decision system, IEEE Trans. on Computers, Vol. 40, No. 12, pp. 1320-1336.
[35] Lin, C. T. and Lee, C. S. (1992), Real-time supervised structure/parameter
learning for fuzzy neural network, Proc. IEEE Int. Conf. on Fuzzy Syst., S. Diego
CA - 1992, pp. 1283-1290.
[36] Wang, L. X. and Mendel, J. M. (1992), Generating fuzzy rules by learning from
examples, IEEE Trans. on Syst. Man and Cybern., vol 22, nr 6, pp. 1414-1427.
[37] Pham, D.T. and Castellani, M. (2002), Evolutionary Fuzzy Logic System for
Intelligent Fibre Optic Components Assembly, Proc. IMechE, Part C, Vol. 216,
No. 5, pp. 571-581.
28
FIGURES
Fig. 1: Flowchart of Evolutionary Algorithm
Fig. 2: Representation scheme
Fig. 3: Membership function encoding
Fig. 4: Plant 1, learning curve of the Evolutionary Algorithm
Fig. 5: Plant 1, learning curve of the Evolutionary Algorithm - last 500 generations
Fig. 6: Plant 2, learning curve of the Evolutionary Algorithm
Fig. 7: Plant 2, learning curve of the Evolutionary Algorithm - last 500 generations

29
TABLES
Table 1: Evolutionary Fuzzy Logic model - Evolutionary Algorithm settings
Table 2: Plant 1 – Comparison results
Table 3: Plant 2 – Comparison results
30
Random initialisation
Solution
population
population
mating pool
new population
yes
no
new
pop
ulat
ion
stop?
Fitness evaluation
Selection
Genetic recombinationspecies_2
Rules crossover
species_1
MFs crossover
species_3
Rules +MFs crossover
Genetic mutation (KB)
Add term
Delete term
Modify MF
Modify rule
species_1 species_2 species_3
Add term
Delete term
Modify MF
Modify rule
Genetic mutation (species)
Fig. 1: Flowchart of Evolutionary Algorithm
31
A B C D EA1 B1 C1
input 1 output
Rule Base
B2 C2 A2 B2 C2A2 B2 C2
A1 B1 C1
A B
A3 B3 C3 A3 B3 C3 B3 C3 A3C3B3C3B3A3B3A3
A CB CB C DD C DD C ED C ED
A3 B3 C3
input 2
A2 B2 C2
input 3
A3 B3 C3
Fig. 2: Representation scheme
32
min
A B C
A B C
max
CHROMOSOME
min max
GENE
B
B
Genotype
Phenotype
MF SPACE PARTITION
Fig. 3: Membership function encoding
33
Fig. 4: Plant 1, learning curve of the Evolutionary Algorithm
learning curve
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0 100 200 300 400 500 600 700 800 900
generation
r.m.s. error
34
Fig. 5: Plant 1, learning curve of the evolutionary algorithm - last 500 generations
learning curve - last 500 generations
0
0.004
0.008
0.012
0.016
0.02
500 600 700 800 900 generation
r.m.s. error
errortrend
35
Fig. 6: Plant 2, learning curve of the evolutionary algorithm
Learning curve
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 100 200 300 400 500 600 700 800 900
generation
r.m.s. error
error
36
Learning curve - last 500 generations
0
0.0005
0.001
0.0015
0.002
0.0025
500 600 700 800 900 generation
r.m.s. error
error
trend
Fig. 7: Plant 2, learning curve of the evolutionary algorithm - last 500 generations
37
Parameters of evolutionary algorithm
population size pop 70
number of generations gen 1000
mutation rate (KB) mut_rate 0.15
mutation rate (species) mut_rate_T 0.08
max # of terms per variable max_terms 6
Initialisation settings
# of terms per variable init_terms 5
lower bound of i/o variables’ partition min 0
upper bound of i/o variables’ partition max 1
Rule Base empty
Fitness function settings
sampling period τ 60
Table 1: Evolutionary fuzzy model - evolutionary algorithm settings
38
Knowledge Base LL DA-FFNN PROPOSED
Knowledge Base
input u(t) partition 5 MFs 5 MFs 5 MFs
input u(t-1) partition 5 MFs 5 MFs 5 MFs
input y(t) partition 5 MFs 5 MFs 4 MFs
input y(t-1) partition 5 MFs 5 MFs 5 MFs
input y(t-2) partition 5 MFs 5 MFs 4 MFs
output y(t+1) partition 5 MFs 5 MFs 5 MFs
fuzzy rules 72 72 923
Accuracy (300 steps) LL DA-FFNN PROPOSED
r.m.s. error 0.040154 0.031606 0.014510
LL: Lin’s and Lee’s feedforward fuzzy neural network
DA-FFNN: differential activation function feedforward fuzzy neural network
PROPOSED: proposed evolutionary fuzzy model
Table 2: Plant 1 – Comparison results
39
Knowledge Base DA-FNN PROPOSED
Knowledge Base
input u(t) partition 5 MFs 4 MFs
input u(t-1) partition 5 MFs 5 MFs
input u(t-2) partition 5 MFs 5 MFs
input y(t) partition 5 MFs 4 MFs
input y(t-1) partition 5 MFs 5 MFs
output y(t+1) partition 5 MFs 4 MFs
fuzzy rules 80 650
Accuracy (60 steps) DA-FNN PROPOSED
average r.m.s. error (20 patterns) 0.004567 0.001036
standard deviation on average (20 patterns) 0.001281 0.000245
Table 3: Plant 2 – Comparison results