els: energy-aware some-for-some location service for ad hoc mobile networks
TRANSCRIPT
ELS: Energy-Aware Some-for-Some LocationService for Ad Hoc Mobile Networks
Abdelouahid Derhab1, Nadjib Badache2, Karim Tari2, and Sihem Sami2
1 Basic software laboratory, CERIST, Rue des 3 freres Aissou, Ben-Aknoun,BP 143 Algiers, 16030 Algeria
2 LSI, USTHB, BP 32 El-Alia Bab-Ezzouar, 16111, Algiers, Algeria
Abstract. In this paper, we propose a new location service for Ad hocmobile networks. The network area is divided into non-overlapping zones.Using a hash function, a node identifier is mapped to a set of zones, inwhich the location information of the node are stored. We also pro-pose a location information distribution scheme that achieves low rateof outdated location information. Using cross-layer design, the servicecan tolerate servers mobility and failure, and last for a long time period.Simulation Results show that the proposed location service experienceslow overhead and high location information availability and accuracy.
1 Introduction
A mobile ad hoc network is a collection of mobile nodes forming a temporarynetwork without any form of centralized administration or predefined infrastruc-ture. Each node acts both as a host and a router. Due to mobility, the networktopology changes frequently, which makes the design of a scalable and robustrouting protocol with low message overhead one of the challenging tasks in sucha network.
In recent years, location-awareness is increasingly becoming an importantfeature of routing protocols and applications. Position-based routing protocols[3,11,9,7,13,18] use the geographic position of nodes available from positioningsystems such as GPS [8] or other type of positioning service [1,4,2] to forwarddata packets. In contrast with topology-based category, they do not need tokeep global states for routing data packets. To enable position-based routing, anode must be able to discover the location of the node whom it wants to com-municate with. Thus, they have the advantage to scale to a larger number ofnodes. Location information are provided by a so-called location service. The useof location services extends to other location-aware applications, e.g., locationtracking and navigation, geocasting, or a tour guide that can provide location-dependent information to tourists (such as map, traffic, and site information).The effort needed to search for tourism information can be significantly reducedwith the help of positioning.
The role of a location service is to map the ID of a node to its geographicalposition. Each location service performs two basic operations: the location up-date and the location query. The location update is responsible for distributing
X. Cheng, W. Li, and T. Znati (Eds.): WASA 2006, LNCS 4138, pp. 240–251, 2006.c© Springer-Verlag Berlin Heidelberg 2006

ELS: Energy-Aware Some-for-Some Location Service 241
information about the current location of a given node D to a set of nodes calledlocation servers. If a node S wants to know the location of node D, it sends alocation query message to one of the location servers of node D.
When designing a location service, the following basic questions need to beconsidered: (1) When should a node update its location information? (2) towhom should a node send its position information? and (3) how should a nodefind the appropriate servers to query for a location. Ad hoc networks character-istics impose different challenges on designing location services. First, dynamictopology leads that there is no static relation between a node and its location.To distribute location information to a set of servers, the location service utilizesa routing protocol, but the routing protocol requires the location informationof these servers in first place, which results in a functional deadlock. Second,the location service must incur low overhead in order that the servers do notdrain out their batteries quickly. Third, network partitioning would make thelocation servers unreachable to some nodes, and hence it considerably decreasesthe availability and the accuracy of location information.
According to Mauve classification [15], the location services are classified ac-cording to how many nodes host the service (i.e., some or all nodes). Further-more, each location server may maintain the position of some specific nodes orall nodes of the network. Thus, the four possible combinations are as follows:some-for-some, some-for-all, all-for-some, and all-for-all.
In this paper, our original contributions are the following. First, we proposea location information distribution scheme that achieves a lower cost than thequorum scheme. The proposed scheme is more likely to provide high location in-formation availability and accuracy. Second, we combine the flat hashing-basedapproach and the proposed scheme to construct an efficient some-for-some lo-cation service. Third, we propose a cross-layer framework that helps the serviceto estimate when a server will run out of battery power or leave its zone. Indoing so, the server will seamlessly replicate its stored location information onan alternative node before it disappears from its actual zone, and hence the ser-vice lifetime is increased. Fourth, according to application requirements, positioninformation are provided with different levels of accuracy.
The rest of the paper is organized as follows: In Section 2, we present anoverview of the system framework. A detailed description of the location serviceis presented in Section 3. Section 4 presents simulation results. Finally, Section5 concludes the paper.
2 System Framework
The architecture of the proposed system framework shown in Fig. 1 consists offour layers: the application layer, the middleware layer, the routing layer and themac layer. As part of the framework, the routing and the mac layers provide anestimation of the residual node lifetime and the available bandwidth respectively.
When a location-aware application such as the tour guide wants to obtain theposition of a certain node D, it contacts the location service. This latter will

242 A. Derhab et al.
Location-awareApplication
Networkapplication
Location Service
Position-basedRouting Protocol
Available BandwidthEstimation
Residual nodelifetime Estimation
Location Table
IEEE 802.11
App
licat
ion
Mid
dlew
are
Rou
ting
Mac
Cross-LayerInformation
Fig. 1. System framework
check if such a position is available in its own location table. If so, it will directlyrespond to the application. Otherwise, it will demand the position-based routingprotocol to find one of the location servers of D. The forwarding decision at eachnode is based on the destinations position and the position of the neighboringnodes. Typically, the packet is forwarded to a neighbor that is closer to thedestination than the forwarding node itself, thus making progress toward thedestination. In order to inform all neighbors within transmission range about itsown position, a node transmits beacons at regular intervals. The location serversshould respond with the current location of D. On the other hand, when a nodeS wants to communicate with a node D, it first contacts the routing protocol,which in turn contacts the location service. The location servers of D shouldrespond with an approximative location information, i.e., the geographic areawhere D is located. In the cross-layer information, the routing layer estimatesthe residual battery lifetime by recording the different packets that pass throughit. It can be used to determine the time at which the location information tablewill be replicated onto another node, in order to maintain location informationavailability for a long time period. The available bandwidth estimation providedby the mac layer is used to derive an upper-bound on the replication time.
3 Energy-Aware Some-for-Some Location Service
3.1 Basic Idea
The quorum based location services [10,12,6,14] can be configured to operate as asome-for-some approach. Update and query operations are performed on a subsetof servers called a write quorum and a read quorum respectively. Using a suchconstruction, we can avoid flooding the network, thus avoid wasting mobile nodesbattery power. Furthermore, the load of each location server can be reduced byevenly distributing the load among the servers.
These subsets are designed such that each read quorum for a node intersectsthe write quorum for any other node. An important aspect of quorum-based

ELS: Energy-Aware Some-for-Some Location Service 243
position services is the following trade-off: the larger the quorum sets, the higherthe cost for position updates and queries, but also the larger the number of nodesin the intersection of two quorums, which improves resilience against unreachablelocation servers. Ad hoc networks are subject to frequent network partitioning,link and node failures. In such environments, quorum systems may suffer fromlow availability in the face of node failures or unreachable nodes. Update andquery operations may be performed at non-intersecting quorums, which maydisable the quorum system, since the intersection property of that system is notguaranteed. To alleviate the problem of query failures, a set of heuristics is usedin selecting servers for update and queries, by maintaining a list of servers thatare unreachable [10].
The fundamental property of the quorum system states that ”each read quo-rum must overlap with any write quorum”. A location information can be writ-ten to or read from any randomly chosen quorum. Thus, the quorum systemsare only efficient in an environment where the relation between a datum and anode is not considered. The location information are shared private, i.e., theyare updated by a unique node (single-writer), and queried by the other nodes(multiple-reader). The existence of one-to-one relation between nodes and theirpositions, allows us to relax the intersection property and propose a new con-struction that maps each node i to a fixed subset of nodes, FSi. To illustratethe advantage of the proposed construction, let us consider an example of a quo-rum system A = {{1, 2, 3}, {1, 4, 5}, {2, 4, 6}, {3, 5, 6}}. In this example, only onemember is in the intersection of any pair of quorums. The absence of a singlenode makes the system inefficient. On the other hand, if we apply the proposedconstruction to the system A, and consider that the fixed subsets are the quo-rums of A, (i) we can get the same cost since update and query operations areperformed on subsets with the same size, and (ii) the correct information is morelikely to be provided since the probability that all nodes of a specific subset areunreachable is lower than that of the quorum construction.
The proposed construction is simple and more resilient to node failure andnetwork partitioning than the quorum systems. However, such static membershipmay result in low data availability and accuracy, because nodes drain out ofpower very quickly. Thus, the disadvantages of quorum system still remains.To deal with the static feature of the proposed construction, we define the fixedsubset FS as a set geographic zones. In each zone, a node is dynamically selectedas a location server.
3.2 Area Partitioning
The area covered by the ad hoc network is partitioned into G square zones ofequal-sizes. All of these zones have well-known identifiers (IDs) distributed overthe range [0, · · · , G − 1]. We assume that there exists a static function f thatmaps a node’s ID into a specific zone. Formally, f(node ID) → zone ID. Thismany-to-one mapping is also known by all nodes in the network. Figure 2 showsthe partitioning scheme. The respective zones’ identifier are shown in the upper-left corner of each zone. Each node is assigned a fixed subset consisting of α

244 A. Derhab et al.
Algorithm 1. The fixed subset construction for node A1: FSA = ∅;2: k := 0;3: for j = 1 to α do4: FSA = FSA ∪ {f(id(A) + k)};5: k := k + [G
α];
6: end for
0 21 3 4
5 76 8 9 dN (i)dW (i)
dE(i)dS (i)
10 1211 13 14
15 1716 18 19
Fig. 2. Area partitioned according to a flat-based approach
zones, where α is a system parameter upper-bounded by G. The construction ofthe fixed subset for a node A is presented in Algorithm 1, where UA denotes theset of zones’ identifier. An example of a function f is: f(ID) = (ID%G). Fork = 0, nodes that return the same value of f() are assigned to the same fixedsubset.
3.3 Location Server Selection
In the flat-based location services [19,17,5], a well-known hash function is usedto map each node’s identifier to a home region. All nodes in the home regionmaintain the location information for the node and reply to queries for that node.A major disadvantage of this design is the single fixed home region. Absence of aserver from the region makes the service carries out complex actions like storingthe location information in the neighboring regions.
Unlike the other flat-based location services, a unique node from the zone is se-lected as a location server. We propose the stability of a node as a metric for the lo-cation server selection criterion. The metric predicts the time period during whichthe node will remain in its zone. It is based on the residual battery power and thecurrent positions of the node. A node disappears from its zone either: (i) if it movesout of its current zone, or (ii) or it drains out of its energy power. Each node i es-
ELS: Energy-Aware Some-for-Some Location Service 245
timates its stability as follows: First, it calculates the rate of its battery power de-pletion Ri for every time period �T , then it estimates , as shown in equation 1, theresidual time before it runs out of energy power such that Ei denotes i’s residualbattery power.
Tpowi =Ei
max (Ri)(s) (1)
Second, it calculates the remaining time before it moves out of its currentzone, Tmobi.
Tmobi =min (dN(i), dS(i), dE(i), dW (i))
V maxi(2)
Where dN(i), dS(i), dE(i), and dw(i) are the distances that separate node i fromthe north, south, east, west sides of its current zone, and V maxi is the node i’smaximum velocity. The respective distances are depicted in Fig. 2. Equation 2derives a conservative estimate on Tmobi. It assumes that the node is movingtoward the nearest side. Finally, the stability of node i ξi is given by the followingequation.
ξi = min (Tpowi, Tmobi) (3)
Initially, the node with the highest value of stability will be selected as thelocation server of its zone. Ties are broken by comparing node identifiers.
The fixed subsets construction, the flat-based approach, and the locationserver selection procedure leads to the creation of G servers. We assume thatG < n. Each server node stores the location information of (α×n
G ) nodes. As( α
G ) < 1, the proposed location service can be classified as a some-for-someapproach.
3.4 Service Operations
Nodes perform two types of operations: update and query. Each operation hasits corresponding response, ack for update and reply for query. Each operationis transformed into a message. Each location server holds a location table, whichrecords for each stored node the following fields: (1) its id, (2) the zone id wherethat node is in, (3) its exact location, and (4) its tiemstamp(i.e. the latest updatetime known by the location server).
Location Update. When a node i moves out of its current zone and into anew one, it sends an update message toward the center of each zone ∈ FSi. Theupdate packet contains the following information:
< src id , seq , src region , target region , new region , new position , new timestamp >.
The pair (src id, seq) denotes the source node and the sequence number ofthe packet. It uniquely identifies the update packet. src region is the id of thesource node’s zone and target region is the server node’s zone. new region andnew position is the node’s new region and new position respectively. The updatepacket includes the id of its new zone and the new timestamp. the new timestampis obtained by increasing the current timestamp by one.

246 A. Derhab et al.
When the packet reaches a node in the target zone, two cases can occur. Ifthat node has a cached route to the location server, the packet is immediatelyrouted toward the server. Otherwise, a route discovery packet is broadcasted inthe zone to find a route to the location server. Upon receiving the update packet,the location server sends back an ack packet to the source node.
Location Query. According to users and applications requirements, querypackets can be sent with two levels of accuracy: high, and low:
– High accuracy: The exact position of the requested node is needed by thelocation-aware applications.
– Low accuracy: It is required by position-based routing protocols, that aimsto deliver data packets to destination nodes, and not to know the exactlocation of those nodes.
A source node S wishing to obtain the position of a node D, sends a querypacket toward the center of each zone ∈ FSD. The query packet containsthe following information: < src id , seq, src region , target region, queried id ,accuracy >.
queried id is the id of the node whose location is being queried. accuracyindicates the accuracy level required.
A node inside a target zone which receives the query packet, either it uses acached route to the location server or it broadcasts a route discovery packet to allnodes within the zone so that a route toward the location server is established,and then it routes the packet to the server.
Upon receiving the query packet, the location server will first check the ac-curacy field of the packet. If the accuracy required is low, it sends back to Sa reply packet containing D’s zone along with the timestamp. Node S choosesamong the reply packets that of the largest timestamp (i.e., the most recentlocation information). If the accuracy field is high, the location server will sendthe query packet to the target node D. D sends back a reply packet containingD’s location to node S. Any further query packets with the same source nodeand sequence number will be discarded by node D.
3.5 Unreachable Zones
If a node i fails to contact the server of a certain zone, it considers that the zone isunreachable. A zone is called unreachable if either it is empty or the location serverin that zone is unreachable due to network partitioning. To avoid unnecessarymes-sage overhead, each node keeps a set, called the Unreachable zone list (UZL). Thislatter includes the zones’ ID which are unreachable. When a given zone is declaredas unreachable, it will be added to Unreachable zone list for a period of time T .During that period, update and query packets are sent to FSi − UZLi. After theexpiration of T , the zone in question will be removed from that set.
3.6 Handling Mobility and Failure of Location Servers
When a location server becomes no longer available, queries that arrive betweenthe time that the server is unavailable and the next updates from nodes whose

ELS: Energy-Aware Some-for-Some Location Service 247
locations are stored at the server will fail. To address this issue, the locationserver node that is about to cross the boundary of its zone or it is about torun out of battery power, has to replicate the location information table onto anew node before it leaves the zone or it dies. The service replication is triggeredwhen the following constraint is verified: (ξi − ΔT ) <time of replication process.Let us consider that D denotes the size of location information table to bereplicated and transmitted over an end−to−end wireless connection with anavailable bandwidth of B bits/s. The replication process needs (D
B ) seconds inorder to be achieved. The old server i and the new server j must fulfill thefollowing requirements: (1) (ξi(t) − ΔT ) < (D
B ) and (2) ξj(t) is the maximumamong the nodes of its zone.
The problem that can occur when tracking the residual lifetime of a nodein its zone, is its disappearance during the interval Δt. No warning is gen-erated until the next period. By that time, the server may be already dis-appeared or not enough time is left to carry out the replication process. Toefficiently track the node in its zone, the following property must hold trueΔt < max ( 1
V maxi, 1
max (Ri)). This technique ensure any-time service availability
as long as the zone is not empty.
4 Simulation Results
In this section, we study the performance of the proposed service using GloMoSimsimulator [21]. The entire region is a square with 2000 m. All nodes have a trans-mission range of 250 m. They move according the waypoint mobility model. In thismodel, a node randomly selects a location and moves toward it with a constantspeed uniformly distributed between zero and a maximum speed Vmax = 7 m/s ,then it stays stationary during a pause time of 1 second before moving to a new ran-dom location. Initially, each mobile node has a battery capacity of 400 joules. Wehave implemented three location services,which are (1) the quorum-based locationservice with unreachable node list and hybrid construction [10] that uses AODVrouting protocol [16], (2) DLM [20], and (3) our proposed energy-aware locationservice (ELS). We have also implemented GPSR [9] with perimeter as a routingprotocol. Nodes periodically initiate queries with different levels to random desti-nations. The following metrics are evaluated for the location service protocols:
1. Update cost: The total number of hops traversed by update packets.2. Query cost: The total number of hops traversed by query packets.3. Availability: It indicates the ability to access location information when
needed. If Ns denotes the number of successful attempts to access a lo-cation information, and Na is the total number of attempts. The availabilityis defined to be: Ns
Na.
4. Accuracy: If Nq denotes the number of query operations. and No the numberof outdated values returned by those queries. The accuracy is defined to be:(Nq−No)
Nq.
5. Service lifetime: The time until all the location servers run out of power.
248 A. Derhab et al.
0
10000
20000
30000
40000
50000
60000
20 40 60 80 100 120
Que
ry c
ost
Density
Hybrid quorumDLMELS
(a) Query cost
0
50000
100000
150000
200000
250000
300000
20 40 60 80 100 120
Upd
ate
cost
Density
Hybrid quorumDLMELS
(b) Update cost
Fig. 3. Overhead cost
0
0.2
0.4
0.6
0.8
1
20 40 60 80 100 120
Ava
ilabi
lity
Density
Hybrid quorumDLMELS
(a) Availability
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
20 40 60 80 100 120
Acc
urac
y
Density
Hybrid quorumDLMELS
(b) Accuracy
Fig. 4. Service reliability
100
1000
10000
100000
20 40 60 80 100 120
Ser
vice
life
-tim
e(s)
Density
Hybrid quorumDLMELS
Fig. 5. Service life-time

ELS: Energy-Aware Some-for-Some Location Service 249
All of our simulations are conducted without any data traffic, which discardthe factors affecting node lifetime, and hence allows us to better judge the perfor-mance of services. To study the performance of the service for network scalability,we have varied the total number of nodes in the network.
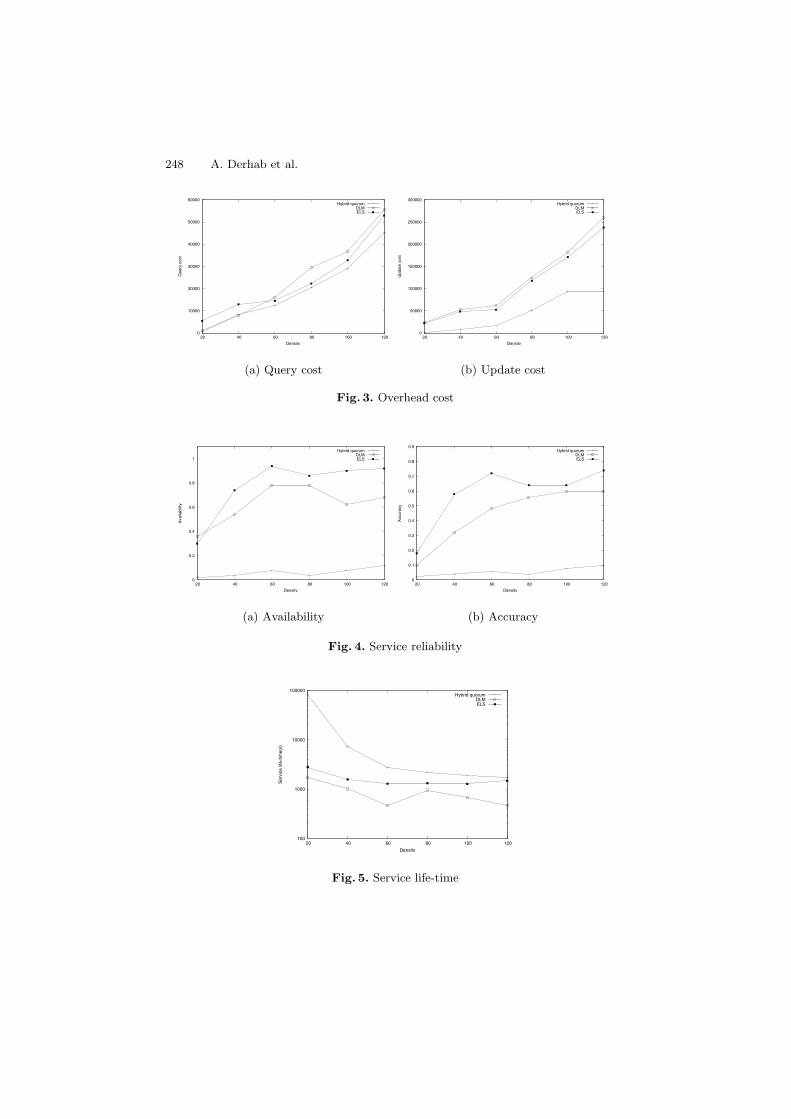
Figure 3(a) and figure 3(b) show the location query cost and the locationupdate cost respectively. Hybrid quorum has the best results. However, theseresults are misleading because as topology changes frequently, more nodes willbe added to the set of unreachable nodes and hence, query and update packets willbe sent to a fewer number of nodes. The quorum construction fails to efficientlyspread the location information in the network. In contrast to hybrid quorum, thetargets of query and update packets in DLM and ELS do not consist of movingnodes but of regions with fixed positions making the scheme more robust tonode mobility. ELS performs better than DLM since packets are routed directlytoward the target zones. In DLM packets must follow the defined hierarchicalorder, which results that packets take long routes in terms of number of hops.
Figure 4(a) and figure 4(b) show the availability and accuracy of the threelocation services. Availability and accuracy increase as density increase in allservices, because the network gets more connected, and hence nodes are likely tosuccessfully deliver their query and update packets to the target location servers.ELS shows the best rates of availability and accuracy. This is due to the factthat packets are sent toward location servers locating in different zones. A nodecan obtain location information of a queried node following the response of oneserver. Second, as we will see in Fig. 5, ELS lasts for a long time period becausethe servers replicates their location tables onto a new node before they leavetheir zones or run out of power. So, the location information is more likely to beavailable and be correct. In contrast to ELS, DLM must access a chain of locationservers in a certain order. If any single server in this chain is unreachable, thequery operation fails. Moreover, a server in DLM does not hand over the locationinformation to another server before it leaves its region, and does not handle thedepletion of node’s power, which increase the probability of query failures.
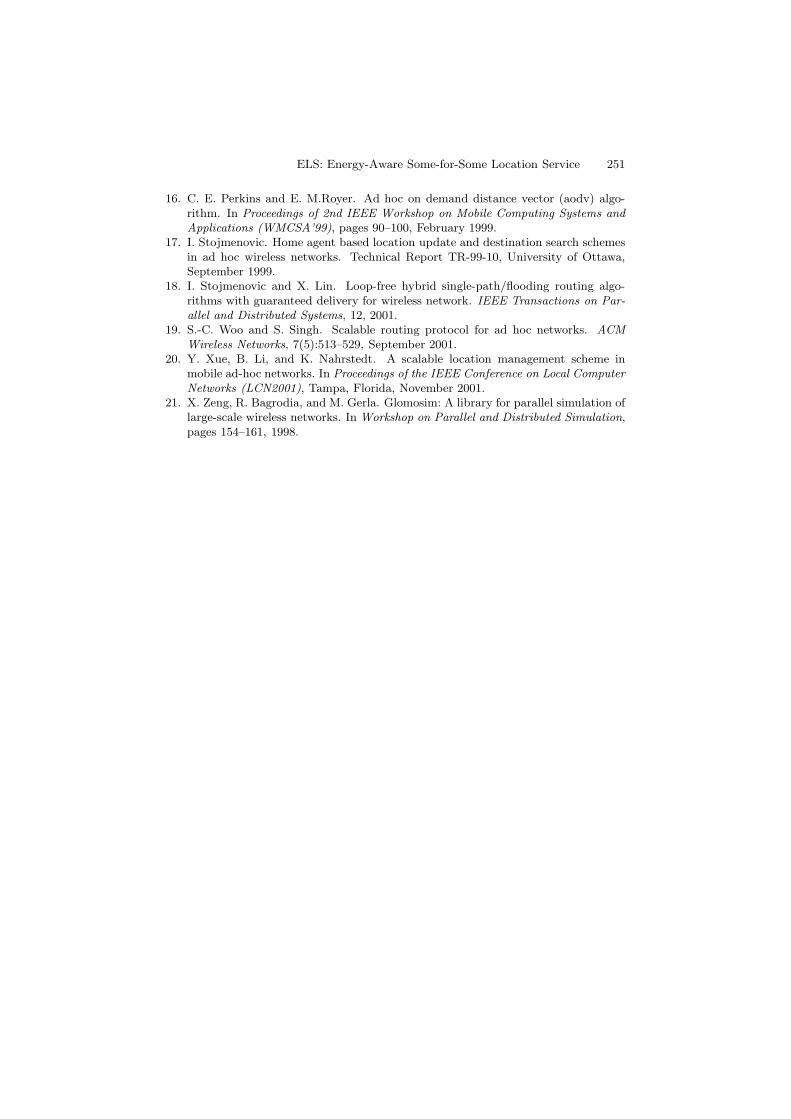
Figure 5 shows the service lifetime experienced by the location services. Hy-brid quorum has the best results. However, these results are misleading since aswe have seen in Fig. 3, hybrid quorum does not efficiently spread location infor-mation in the network, and as topology changes, more nodes will be added tothe set of unreachable nodes resulting in less messages generation. ELS performsbetter than DLM because the location servers replicate their location tables ontoa new elected location server before they disappear from their zones, which con-siderably increases the lifetime of ELS.
5 Conclusion
In this paper, we have presented the Energy-aware Some-for-some Location Ser-vice (ELS). ELS combines a simple location information distribution schemeand a flat-based hash function to select zones where location information will bestored. ELS is suitable for different application requirements. Updates and query

250 A. Derhab et al.
packets are sent toward fixed zones, which permits to avoid tracking the locationservers when they change their zones or die. A new server is elected when thecurrent server is about to leave the zone or run out of power. This techniquesignificantly increases the service lifetime. The simulation results show the ef-fectiveness of the proposed scheme. The proposed location service experienceshigh location information availability and accuracy, high service lifetime and itincurs low cost.
References
1. S. apkun, M. Hamdi, and J. Hubaux. Gps-free positioning in mobile ad-hoc net-works. In Proceedings of the 34th Hawaii International Conference on SystemSciences, 2001.
2. S. apkun, M. Hamdi, and J. P. Hubaux. Gps-free positioning in mobile ad-hocnetworks. Cluster Computing Journal, 5(2), April 2002.
3. S. Basagni, I. Chlamtac, V.R. Syrotiuk, and B.A. Woodward. A distance routingeffect algorithm for mobility (dream). In Proceedings of the ACM/IEEE Inter-national Conference on Mobile Computing and Networking (MOBICOM), pages76–84, 1998.
4. N. Bulusu, J. Heidemann, and D. Estrin. Gps-less low-cost outdoor localization forvery small devices. IEEE Personal Communications, 7(5):28–34, October 2000.
5. Saumitra M. Das, Himabindu Pucha, and Charlie Hu. Performance comparison ofscalable location services for geographic ad hoc routing. In Proceedings of IEEEINFOCOM 2005, March 2005.
6. Zygmunt J. Haas and Ben Liang. Ad hoc mobility management with uniformquorum systems. IEEE/ACM Transactions on Networking, 7(2):228–240, 1999.
7. R. Jain, A. Puri, and R. Sengupta. Geographical routing using partial informa-tion for wireless ad hoc networks. IEEE Personal Communications, pages 48–57,February 2001.
8. E. Kaplan. Understanding GPS. Artech House, Norwood, MA, 1996.9. B. Karp and H. T. Kung. Gpsr: Greedy perimeter stateless routing for wireless
networks. In Proceedings of the ACM/IEEE International Conference on MobileComputing and Networking (MOBICOM), pages 243–254, 2000.
10. Goutham Karumanchi, Srinivasan Muralidharan, and Ravi Prakash. Informationdissemination in partitionable mobile ad hoc networks. In Symposium on ReliableDistributed Systems, pages 4–13, 1999.
11. Y. Ko and N.H. Vaidya. Location-aided routing (lar) in mobile ad hoc networks.In Proceedings of the ACM/IEEE International Conference on Mobile Computingand Networking (MOBICOM), pages 66–75, 1998.
12. Hyunyoung Lee, Jennifer L. Welch, and Nitin H. Vaidya. Location tracking withquorums in mobile ad hoc networks. Ad Hoc Networks, Elsevier Science, 1(4):371–381, November 2003.
13. W.-H. Liao, Y.-C. Tseng, and J.-P. Sheu. Grid: a fully location-aware routingprotocol for mobile ad hoc networks. Telecommunication Systems, 18:6184, 2001.
14. Dahlia Malkhi, Michael K. Reiter, Avishai Wool, and Rebecca N. Wright. Proba-bilistic quorum systems. Information and Computation, 170(2):184–206, 2001.
15. M. Mauve, J. Widmer, and H. Hartenstein. A survey on position-based routing inmobile ad hoc networks. IEEE Network, 15(6):30–39, November/December 2001.
ELS: Energy-Aware Some-for-Some Location Service 251
16. C. E. Perkins and E. M.Royer. Ad hoc on demand distance vector (aodv) algo-rithm. In Proceedings of 2nd IEEE Workshop on Mobile Computing Systems andApplications (WMCSA’99), pages 90–100, February 1999.
17. I. Stojmenovic. Home agent based location update and destination search schemesin ad hoc wireless networks. Technical Report TR-99-10, University of Ottawa,September 1999.
18. I. Stojmenovic and X. Lin. Loop-free hybrid single-path/flooding routing algo-rithms with guaranteed delivery for wireless network. IEEE Transactions on Par-allel and Distributed Systems, 12, 2001.
19. S.-C. Woo and S. Singh. Scalable routing protocol for ad hoc networks. ACMWireless Networks, 7(5):513–529, September 2001.
20. Y. Xue, B. Li, and K. Nahrstedt. A scalable location management scheme inmobile ad-hoc networks. In Proceedings of the IEEE Conference on Local ComputerNetworks (LCN2001), Tampa, Florida, November 2001.
21. X. Zeng, R. Bagrodia, and M. Gerla. Glomosim: A library for parallel simulation oflarge-scale wireless networks. In Workshop on Parallel and Distributed Simulation,pages 154–161, 1998.