controlador pd (proporcional derivativo) para una planta de primer orden
TRANSCRIPT
CONTROLADOR PD (PROPORCIONAL DERIVATIVO) PARA UNAPLANTA DE PRIMER ORDEN.
1.OBJETIVOS funcionamiento de un controlador PD (proporcional
derivativo). Simular en matlab y simulink. Implementar un controlador PD.
2. MARCO TEÓRICOControlador PD
V (t )=Kpe (t )+KpTdde(t)dt
2.1 ACTIVIDADES PREVIASObtenga la respuesta al escalón unitario de una plantade primer orden.
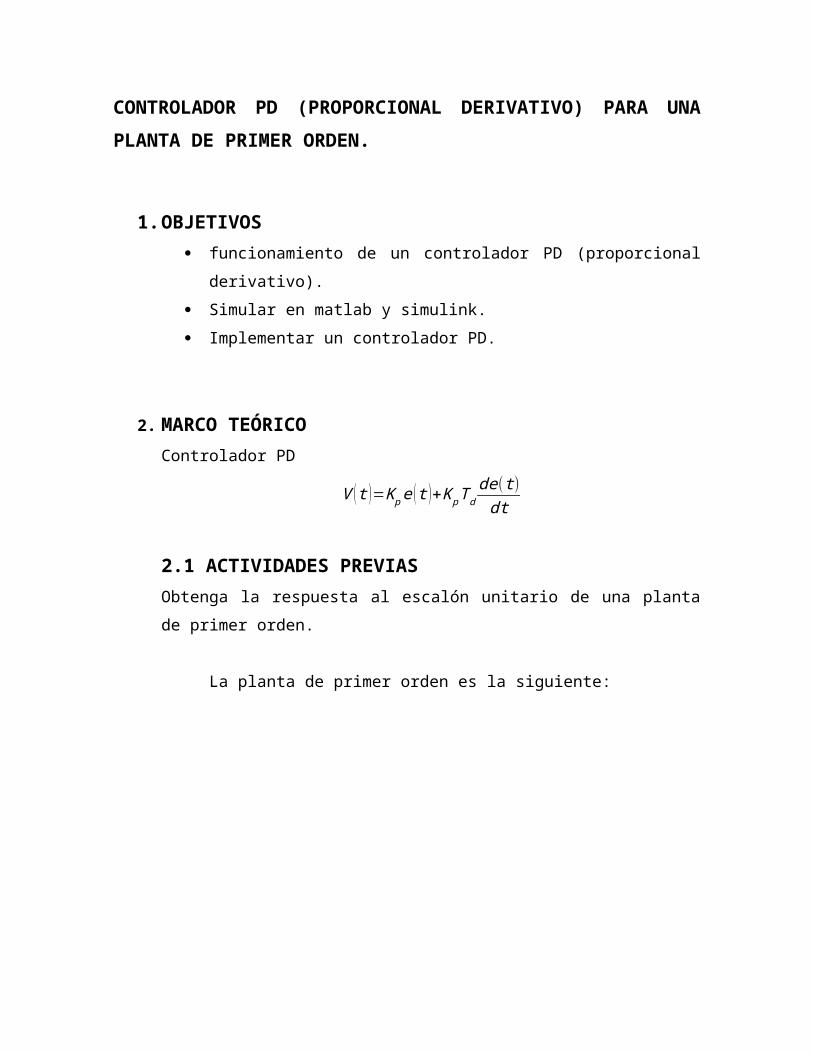
La planta de primer orden es la siguiente:
|
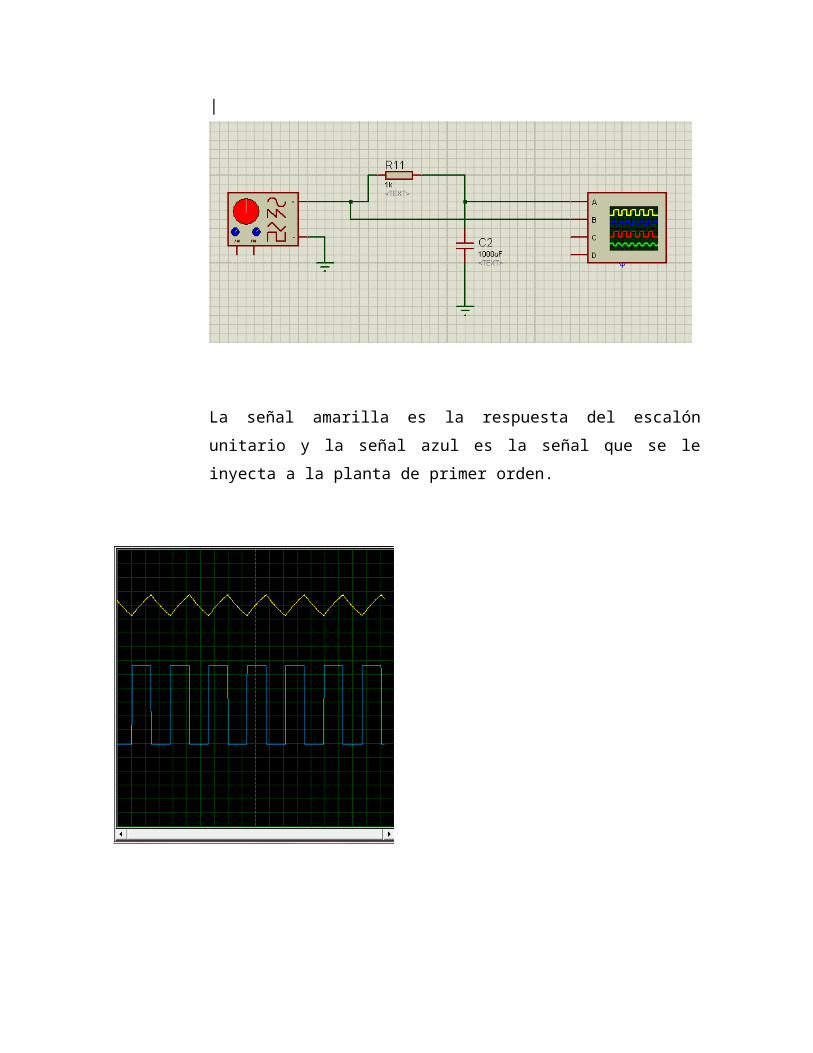
La señal amarilla es la respuesta del escalónunitario y la señal azul es la señal que se leinyecta a la planta de primer orden.
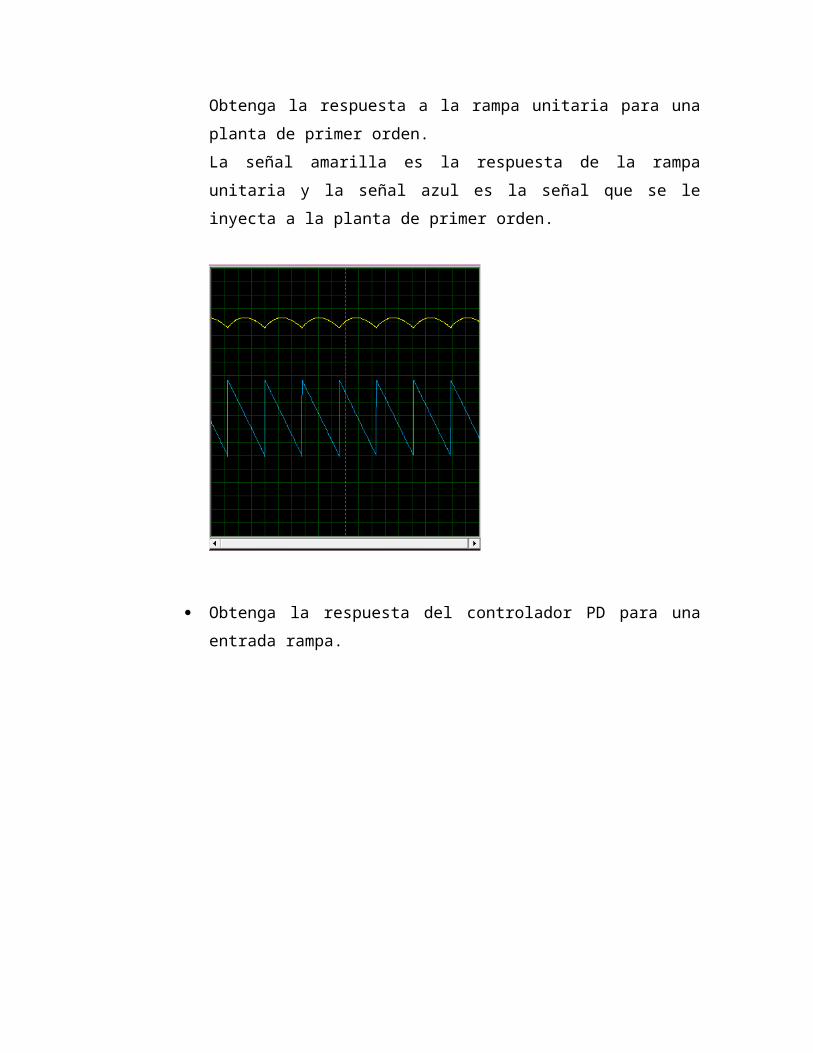
Obtenga la respuesta a la rampa unitaria para unaplanta de primer orden.La señal amarilla es la respuesta de la rampaunitaria y la señal azul es la señal que se leinyecta a la planta de primer orden.
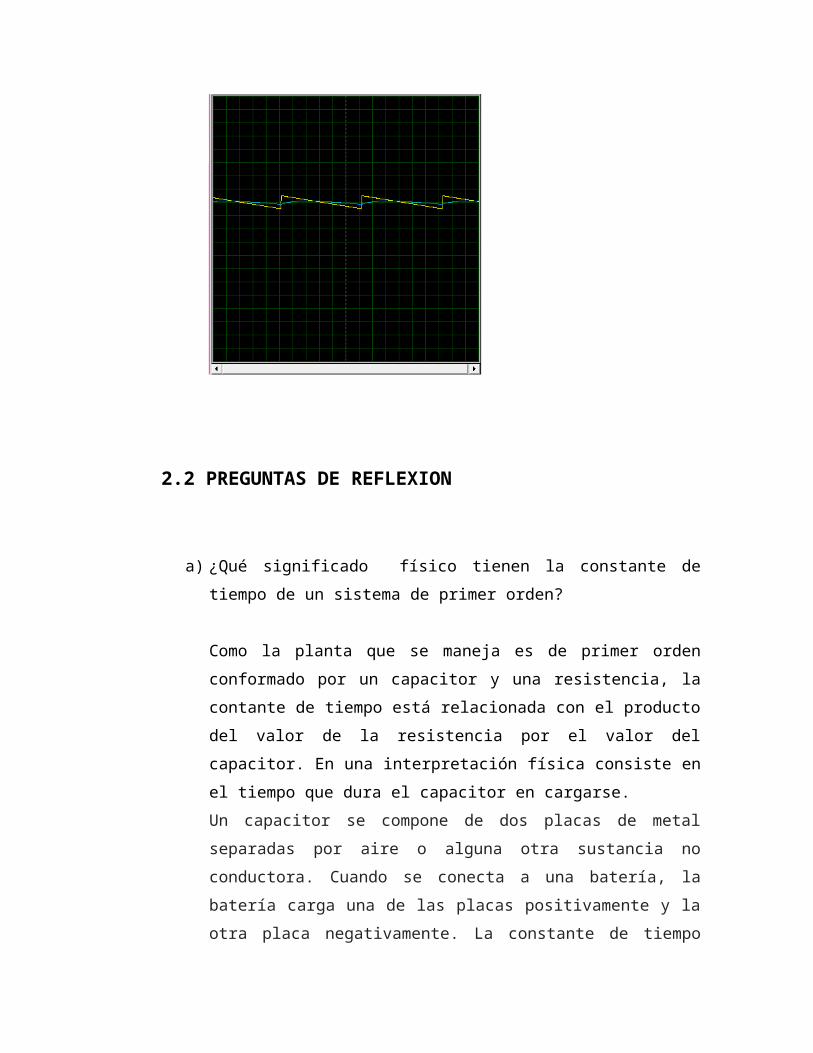
Obtenga la respuesta del controlador PD para unaentrada rampa.
2.2 PREGUNTAS DE REFLEXION
a) ¿Qué significado físico tienen la constante detiempo de un sistema de primer orden?
Como la planta que se maneja es de primer ordenconformado por un capacitor y una resistencia, lacontante de tiempo está relacionada con el productodel valor de la resistencia por el valor delcapacitor. En una interpretación física consiste enel tiempo que dura el capacitor en cargarse.Un capacitor se compone de dos placas de metalseparadas por aire o alguna otra sustancia noconductora. Cuando se conecta a una batería, labatería carga una de las placas positivamente y laotra placa negativamente. La constante de tiempo
resistiva-capacitiva, o RC, es la medida de cuántotiempo tarda cargar o descargar un condensador al63,2 por ciento. Esta medida de tiempo dependetanto de la capacidad del capacitor como de laresistencia del circuito. La constante de tiempo RCes igual a la resistencia multiplicada por la"capacitancia".
b) ¿El error de estado estable de un sistema físico deprimer orden, como puede disminuirse?
Aumentando la ganancia aunque es mayor el sobrepasoen porcentaje. También se reduce con la adición deintegración en trayectoria directa.
c) ¿El polo de un sistema de primer orden como incideen la velocidad de respuesta del sistema?
Puesto que el polo dominante es el que influye enla velocidad de respuesta de un sistema de controlporque mientras más cerca este del eje jω. Por lotanto el polo dominante si incide en la velocidadde respuesta del sistema de control.
3. DESARROLLO EXPERIMENTAL
3.1 MATERIAL
Protoboard Laptop Software simulink y matlab
3.2 ACTIVIDADES Simular la implementación de un controlador PD para
una planta de primer orden, utilizando matlab ysimulink.
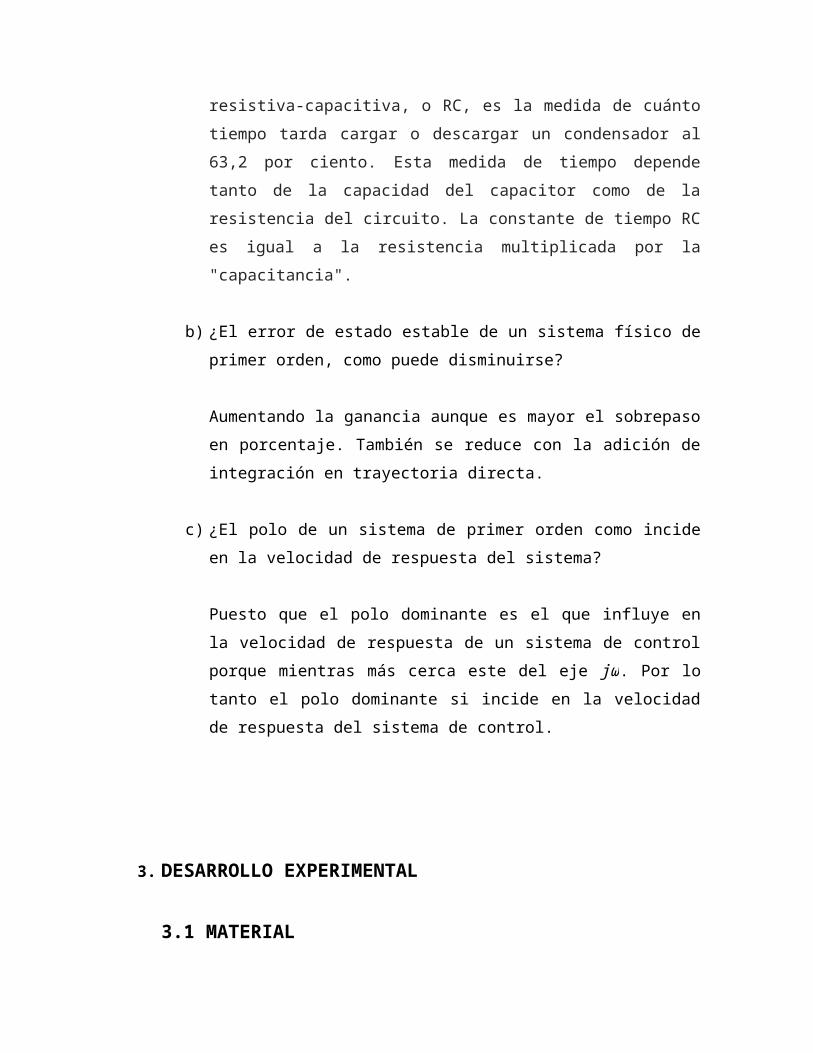
El circuito es el siguiente:
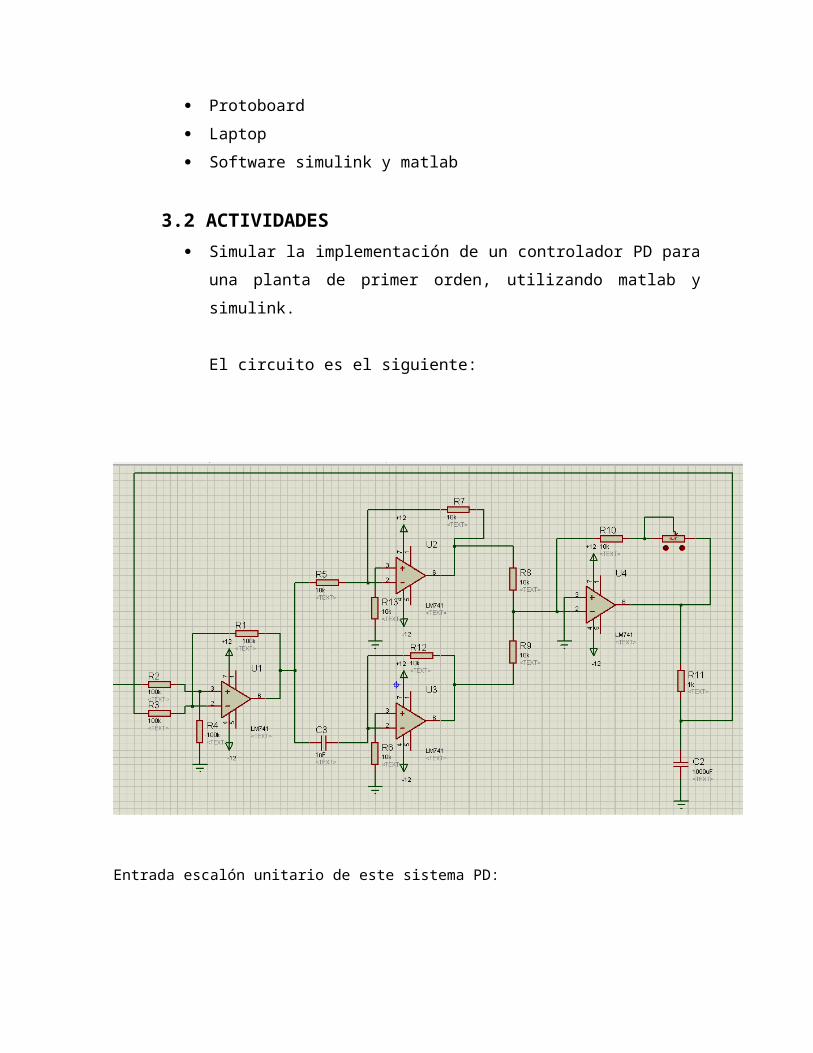
Entrada escalón unitario de este sistema PD:
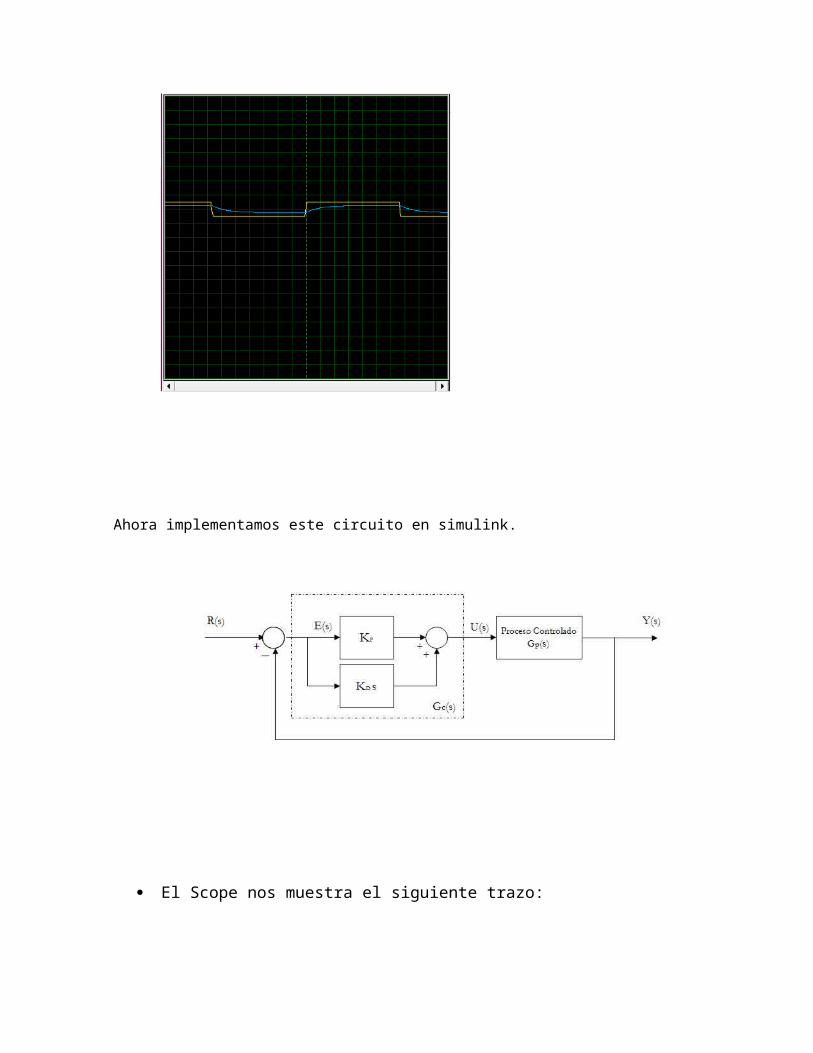
Ahora implementamos este circuito en simulink.
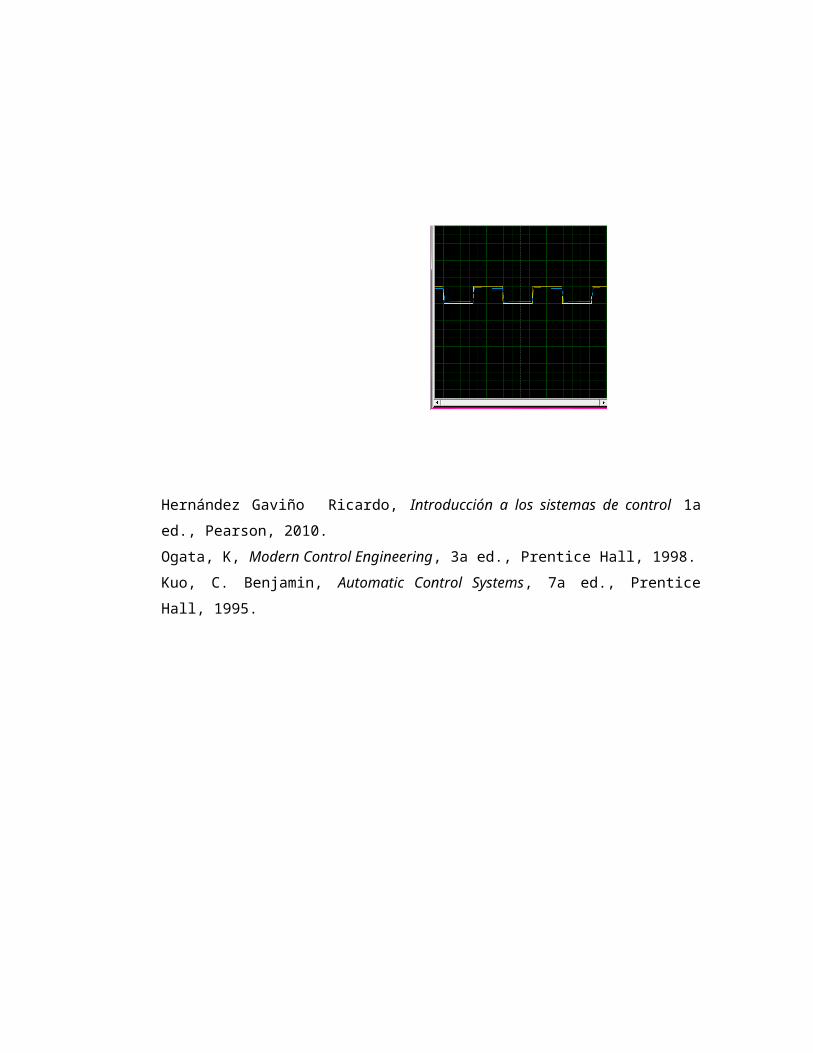
El Scope nos muestra el siguiente trazo:
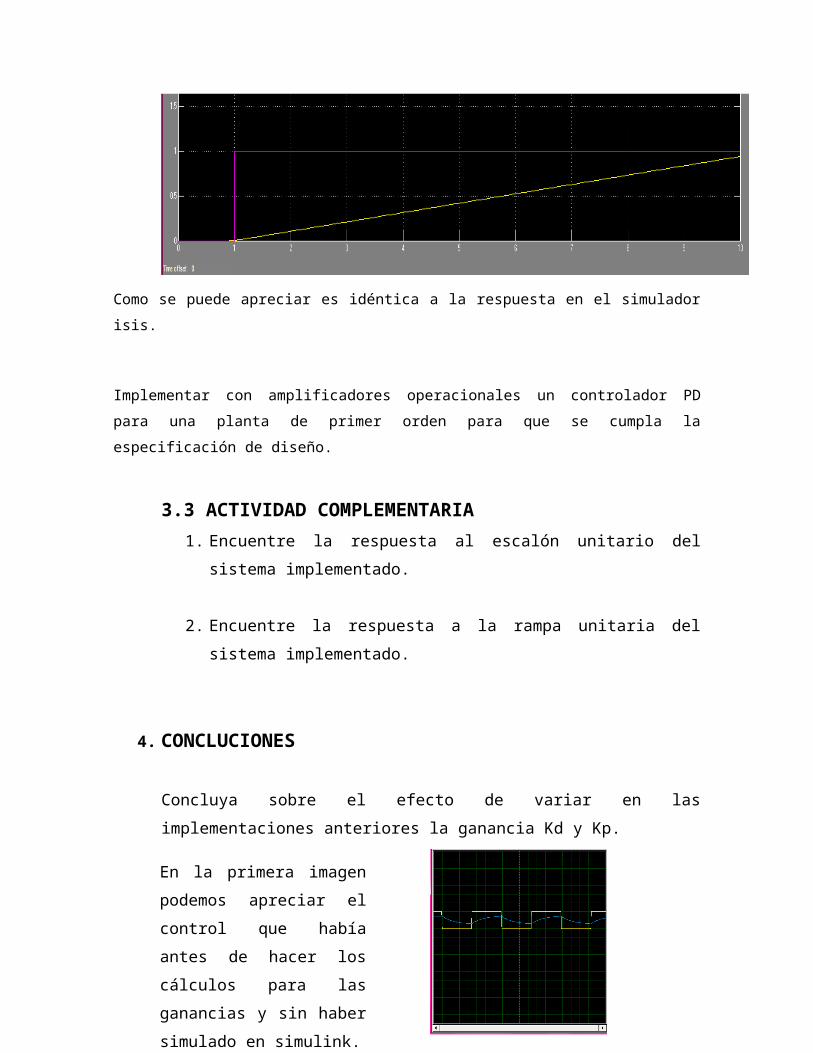
Como se puede apreciar es idéntica a la respuesta en el simuladorisis.
Implementar con amplificadores operacionales un controlador PDpara una planta de primer orden para que se cumpla laespecificación de diseño.
3.3 ACTIVIDAD COMPLEMENTARIA
1. Encuentre la respuesta al escalón unitario delsistema implementado.
2. Encuentre la respuesta a la rampa unitaria delsistema implementado.
4. CONCLUCIONES
Concluya sobre el efecto de variar en lasimplementaciones anteriores la ganancia Kd y Kp.
En la primera imagenpodemos apreciar elcontrol que habíaantes de hacer loscálculos para lasganancias y sin habersimulado en simulink.
En la segunda imagen
BIBLIOGRAFIA
Hernández Gaviño Ricardo, Introducción a los sistemas de control 1aed., Pearson, 2010.Ogata, K, Modern Control Engineering, 3a ed., Prentice Hall, 1998.Kuo, C. Benjamin, Automatic Control Systems, 7a ed., PrenticeHall, 1995.
En la primera imagenpodemos apreciar elcontrol que habíaantes de hacer loscálculos para lasganancias y sin habersimulado en simulink.
En la segunda imagen