chem 3010 introduction to quantum chemistry, spectroscopy
TRANSCRIPT
1
CHEM 3010
Introduction to
Quantum Chemistry,
Spectroscopy,
& Statistical Thermodynamics
2
Rene Fournier: Petrie 303, [email protected],
ext 30687
prerequisite: CHEM 2011
Required Text: Physical Chemistry by Thomas
Engel and Philip Reid (Pearson Prentice Hall) 3rd
edition (2013), ISBN-10: 0-321-81200-X ISBN-13:
978-0-321-81200-1
Course web site (soon): go to www.yorku.ca/renef
and follow the CHEM 3010 link.
Lectures: LSB 105, MWF 10:30–11:20
Office hours: Petrie 303, MWF 13:00-14:00
3
Chapter 12:
From Classical to
Quantum Mechanics
4
In early 1900’s, classical physics failed to explain
• why atoms, with their electrons orbiting around
a nucleus, are stable
• why the spectrum of the H atom is discrete
• the blackbody radiation
• the photoelectric effect
• electron diffraction
A “new physics” was needed.
5
Two key concepts in quantum mechanics:
• energy quantization:
the amount of energy exchanged between molecules
and radiation (light) is a discrete variable, ie, it is
not continuous
• wave-particle duality:
light (a wave) sometimes shows particle-like pro-
perties; and “particles” (e−, p+, atoms, . . . ) so-
metimes show wave-like properties.
6
Rutherford, 1910: atoms have a positive charge
concentrated at the center (nucleus) and negative
charge (electrons, e−) spread out around it.
Classically, orbiting e− should radiate energy and
quickly spiral down to the nucleus.
How can atoms be stable ? ? ?
7
H atoms only emit light with specific (discrete)
wavelengths λ, see Fig. 12.11, p 304.
A fit to data shows that
1
λ= RH
(1
n21
− 1
n22
)
with RH = 109678 cm−1
n1 = 1, 2, 3, . . .
and n2 = n1 + 1, n1 + 2, n1 + 3, . . .
But why ?
8
Blackbody radiation
Fig. 12.1, p295
Light is emitted, re-absorbed, and re-emitted many
times: it is in thermodynamic equilibrium with
the solid.
9
Classical physics: the radiation energy density for
frequency between ν and ν + dν:
ρ(ν, T ) =8πν2
c3Eosc =
8πν2kBT
c3
kB = 1.381× 10−23 J K−1
c = 2.998× 108 m s−1
ρ(ν, T ): J m−3 s
ρ(ν, T ) ∝ ν2, so
∫ ∞0
ρ(ν, T ) dν = C ×∫ ∞
0ν2dν →∞
The “UV catastrophe” predicted by classical physics
makes no sense!
10
Planck (1900) hypothesized that oscillating dipoles
in the solid could only contain energy hν, 2hν,
3hν, . . . , and nothing in between: their energy is
“quantized”. That led to . . .
Eosc =hν
ehν/kBT − 1
and a formula for ρ(ν, T ) in perfect agreement
with expt when
h = 6.6261× 10−34 J s
Note that at high T (kBT � hν)
Eosc =hν
(1 + hν/kBT + . . .) − 1= kBT
as in the classical case.
11
Photoelectric effect (Fig. 12.3, p297)
Light of intensity I and frequency ν causes N e−
to be emitted with kinetic energy Ee.
1. N = 0 when ν < ν0
2. N ∝ I
3. Ee is independent of I
4. Ee ∝ (ν − ν0)
5. an e− is emitted even when I is very small, as
if all light energy was concentrated in one
spot, like a particle!
12
Einstein, 1905: light is made of “grains” (photons)
each with an energy proportional to frequency:
Ephoton ∝ ν
Ephoton = C × ν
e− are bound to the metal by an energy φ, the
work function. If one photon causes the emission
of one e−,
Ee = Cν − φ = C(ν − ν0)
A fit to data gives C = h !?
Ephoton = hν
13
Bohr’s H atom
1. the e− goes around the proton, with orbit cir-
cumference 2πr
2. for stable orbits Coulombic and centrifugal forces
must cancel out: e2/(4πε0r2) = mev
2/r
This gives v2 = e2/(4πε0mer)
3. the e− can jump between orbits 1 and 2 by ab-
sorbing light energy E2 − E1 = ∆E = hν
4. the angular momentum is mevr = n(h/2π)
with n = 1, 2, 3,. . .
This is not a trivial assumption!
14
m2e ×
(e2
4πε0mer
)× r2 = n2(h/2π)2
Rearranging gives the size of stable orbits, rn.
rn = n2 h2
4π2
4πε0mee2
= n2 0.5291772× 10−10m
The energy in a stable orbit, En, is the sum of
potential and kinetic energies
En =−e2
4πε0r+mev
2
2
=−e2
4πε0r+
mee2
8πε0mer
=−e2
8πε0rn
15
En = − 1
n2
mee4
8ε20h2
= − 1
n22.17987× 10−18 J
in perfect agreement with the H atom spectrum!
Furthermore,
2.17987× 10−18 J = hcRH
Same h again!?
16
DeBroglie, 1924: every object has an associated
wavelength λ
λ =h
p=
h
mv
Davisson and Germer, 1927, observed diffraction
of an e− beam off a NiO crystal.
If the beam has very few e−, we see individual e−
impacts, but the diffraction pattern is preserved.
He atoms bouncing off a Ni surface also form a
diffraction pattern.
17
e− diffraction by a double slit
A low intensity e− beam shows particle-like be-
havior.
But accumulating signals over a long time reveals
the diffraction pattern ⇒ wave-like behavior.
⇒ each e− goes through both slits at once and
“interferes with itself”. Each e− is wave-like . . .
until it hits the photographic plate.
18
Chapter 13:
The Schrodinger Equation
(S equation)
19
• Quantum mechanics (QM) is strictly “better”
(more accurate) than classical mechanics (CM)
• QM is much more complicated
• QM and CM give nearly identical results when
1. masses are big enough ( ' 100 a.m.u.)
2. dimensions are big enough (' 1000 A)
3. T is high enough
• Better: CM may be used when
(1) λ = h/p is small compared to a charac-
teristic length for the phenomenon
(2) ∆E is small compared to kBT

20
Diffraction of e− and Xe atoms
through a 1 A slit
21
Vibrations of H2 and Ar2 at T = 300 K
22
Diffraction of e−, He+, and Xe+ off a surface
Take λ = 1 A:
v =h
mλ= 6.63× 10−24/m
KE = mv2/2 =h2
2mλ2
=1
m× 2.20× 10−47 J
=1
m× 1.37× 10−28 eV
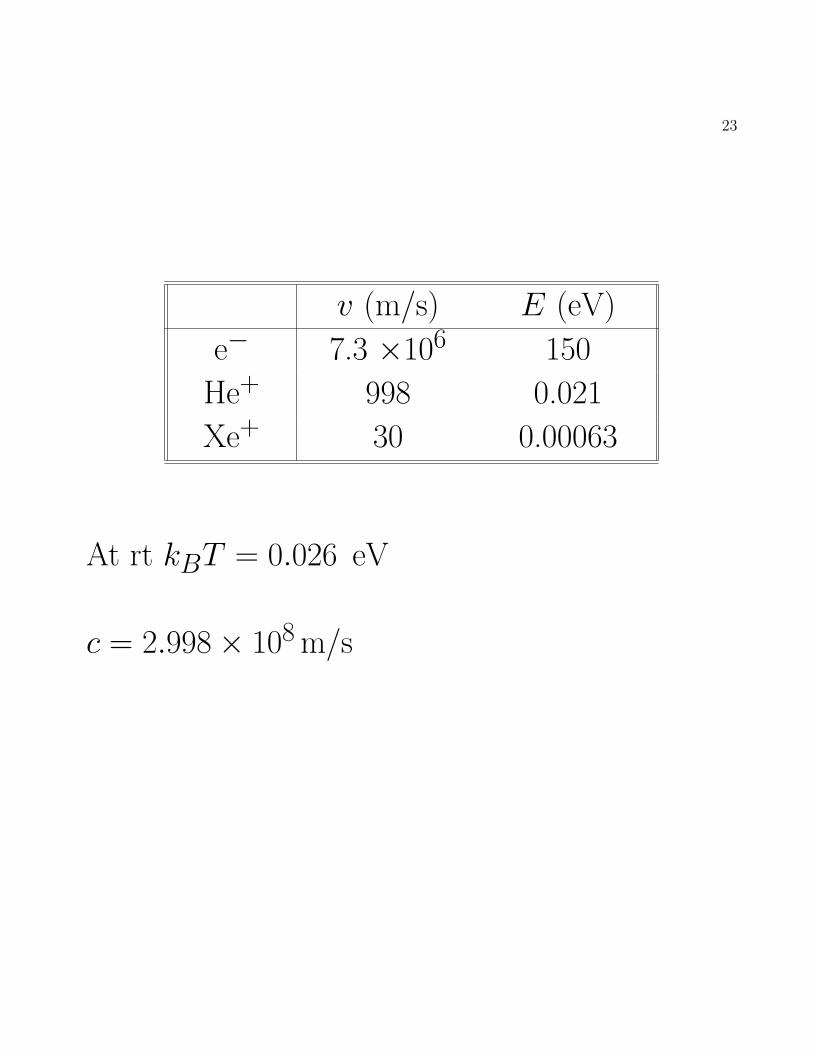
23
v (m/s) E (eV)
e− 7.3 ×106 150
He+ 998 0.021
Xe+ 30 0.00063
At rt kBT = 0.026 eV
c = 2.998× 108 m/s
24
Traveling wave:
velocity v = λν
vertical displacement ψ:
ψ(x, t) = A sin[2π(x/λ− νt)]note that
ψ(x± λ, t) = ψ(x, t)
ψ(x, t± 1/ν) = ψ(x, t)
because that adds ±2π inside [. . .] in both cases.
Let
k = 2π/λ
ω = 2πν

25
then
ψ(x, t) = A sin(kx− ωt)
but
sinx = cos(x− π/2)
and the choices for x = 0 and t = 0 are arbitrary.
So
ψ(x, t) = A cos(kx− ωt + φ)
26
Complex numbers
The imaginary number i is defined by
i2 = −1
A complex number z has a real part a and ima-
ginary part ib: z = a + ib, with a and b real.
For z = a + ib, define
z∗ = a− ib
Then
zz∗ = a2 − aib + aib− i2b2 = a2 + b2
so zz∗ is always real. We also define
Re(z) = a
Im(z) = b
27
Physical quantities (energy, position, mass, etc.)
are always real of course. But complex numbers
and functions “z” can be used as intermediate
variables to describe physical systems, and the
physical quantities can then be expressed in terms
of zz∗, Re(z), or Im(z).
28
Complex plane representation of z = a + ib:
a = r cos θ ⇒ θ = cos−1(a/r)
b = r sin θ ⇒ θ = sin−1(b/r)
r =√a2 + b2
Euler’s formula:
eiθ = cos θ + i sin θ
So z can be written as z = reiθ and
ψ(x, t) = A Re[ei(kx−ωt+φ)
]
29
Standing wave.
If you pluck a string, a mixture of λ’s coexist for a
short time, but they all interfere and destruct ex-
cept λ = 2L, λ = 2L/2, λ = 2L/3, . . .λ = 2L/n,
n = 1, 2, 3,. . . .
The “quantization” of standing waves, E = hν,
and λ = h/p, suggested that the classical diffe-
rential equation for waves may apply to particles,
with λclassical changed to h/p.
. . .
30
Time-dependent S equation, with ~ = h/2π:
−~2
2m
∂2Ψ(x, t)
∂x2+ V (x, t)Ψ(x, t) = i~
∂Ψ(x, t)
∂t
When V (x, t) = V (x), it reduces to the time-
independent S equation
[−~2
2m
∂2
∂x2+ V (x)
]ψ(x) = Eψ(x)
where Ψ(x, t) = ψ(x) e−iEt/~
The quantity in [brackets] is an operator, the
Hamiltonian operator (or energy operator).
31
Numbers, functions, and operators
If x and y are real numbers, a function f is a rule
(or algorithm) that inputs a number x and out-
puts another number y: y = f (x).
An operator O is an algorithm that inputs a func-
tion f and outputs another function g:
g(x) = O[f (x)]
Examples of operators: “multiply by 3”, “take the
derivative w.r.t. x”, “take the square of”, . . .
32
Note: a functional is an algorithm that inputs a
function f and outputs a number y
y = F [f (x)]
for example, “integrate f between 0 and infinity”,
or “take the minimum of f over the interval from
0 to 5”.
A transform is an algorithm that inputs a func-
tion f of variable x, and outputs a different func-
tion g of a different variable t:
g(t) = F [f (x)]
for ex., the Fourier transform (often used for time-
to-frequency mapping).

33
From the time-dependent S equation to
the time-independent S equation
When the potential is time-independent, V = V (x) (e.g., for the proton-
electron pair of a H atom), we can write the total wavefunction Ψ(x, t)
as a product
Ψ(x, t) = ψ(x)φ(t) (1)
To show that it is correct, substitute the right-hand side (r.h.s.) in the
time-dependent S equation with V (x, t) changed to V (x).
φ(t)
[−~2
2m
∂2ψ(x)
∂x2+ V (x)ψ(x)
]= i~ψ(x)
∂φ(t)
∂t(2)
φ(t) Hψ(x) = i~ψ(x)∂φ(t)
∂t(3)
The last equation is just a definition of H , the hamiltonian operator.
Next, divide boths sides by φ(t)ψ(x).
(Hψ(x)
ψ(x)
)= i~
1
φ(t)
∂φ(t)
∂t(4)
34
(1) the r.h.s. has units J s s−1 or J (energy). Therefore, Hψ(x)/ψ(x)
also has units of energy.
(2) the r.h.s. does not depend on x, so the l.h.s. does not depend on
x either. In other words, Hψ(x)/ψ(x) represents a constant energy.
Call it E, and multiply both sides by φ(t).
Eφ(t) = i~dφ(t)
dt(5)
(−iE/~)φ(t) = −i2 dφ(t)
dt=dφ(t)
dt(6)
so
φ(t) = e−iEt/~ (7)
We also have Hψ(x)/ψ(x) = E, or
Hψ(x) = Eψ(x) (8)
with
H =−~2
2m
∂2
∂x2+ V (x, t)
Equation (8) is the time-independent S equation.

35
Now let’s repeat the derivation with V = V (x, t) instead. Equation (2)
becomes
φ(t)−~2
2m
∂2ψ(x)
∂x2+ φ(t)V (x, t)ψ(x) = i~ψ(x)
∂φ(t)
∂t(9)
Divide both sides by ψ(x)φ(t):
1
ψ(x)
−~2
2m
∂2ψ(x)
∂x2+ V (x, t) =
1
φ(t)i~∂φ(t)
∂t(10)
The r.h.s. does not depend on x so we can write more simply
1
ψ(x)
−~2
2m
∂2ψ(x)
∂x2+ V (x, t) = f (t)
If we write the last equation twice, for times t2 and t1, and subtract one
from the other, the terms 1ψ(x)
−~2
2m∂2ψ(x)∂x2 cancel out and we’re left with
only
V (x, t2)− V (x, t1) = f (t2)− f (t1) (11)
The r.h.s. does not depend on x, therefore the l.h.s. does not depend on
x: the potential is a function of time only, V = V (t). This shows that
we can decompose Ψ(x, t) as a product ψ(x)φ(t) only if V (x, t) = V (x)
(first case) or V (x, t) = V (t) (second case). If the potential depends on
both x and t, we can not write Ψ(x, t) = ψ(x)φ(t).
36
We have the time-independent S equation.
Now what ??
What are the meanings of E, H , and ψ(x)?
• E is the energy of the system in a stationary
state, a constant
• H is a mathematical operation that gives us
E if we know ψ
• with H , we can set up a differential equation
whose solutions are En and ψn(x), n = 1, 2, 3, . . .
• ψ(x) is a fictitious wave associated with a par-
ticle (or a system). It has no direct meaning. But
ψ(x)2dx has meaning.
37
Eigenvalue Equations
The time-independent S equation is
Hψ(x) = Eψ(x)
H is an operator. The S equation is an “eigen-
value equation” (EE) where E is the eigenvalue
and ψ(x) is the eigenfunction. Here’s a simpler
example of EE:
O =d
dx
Of (x) = αf (x)
The solutions to this EE: f (x) = Ceax, α = a.
38
Note that
(1) once O is known, the EE solutions (f (x), α)
can be found;
(2) for a given O, there are infinitely many
solutions;
(3) in this example, the eigenvalues a form
a continuum. However, if we force f (x) to satisfy
some boundary conditions, the eigenvalues will
form a discrete set (which is still infinite).
39
For the time-independent S equation:
1. from V (x)⇒ H
2. solve Hψ = Eψ ⇒ (En, ψn(x)), n = 1, 2, 3. . .
3. ψ(x)⇒ physical properties of stationary states
40
The eigenfunctions of a QM operator, including
H , form a complete and orthogonal set of func-
tions.
Here’s a simple example of orthogonal functions.
R1(x) = 1 if 0.5 ≤ x < 1.5
= 0 otherwise
R2(x) = 1 if 1.5 ≤ x < 2.5
= 0 otherwise
. . .
Rk(x) = 1 if k − 1/2 ≤ x < k + 1/2
= 0 otherwise
41
These functions are orthogonal because
∫ ∞−∞
R∗k(x)Rl(x)dx = 0 if k 6= l
They are normalized in the sense that
∫ ∞−∞
Rk(x)dx = 1
The Rk’s are orthonormal.
The Rk’s can be used to represent, approximately,
any function. For ex., take g(x) = x2, for x > 0.
42
g(x) ≈∑k
ckRk(x)
g(x) ≈ bR0(x) + (1 + b)R1(x)
+ (4 + b)R2(x) + (9 + b)R3(x) + . . . (A)
where b = 1/12. Why the “1/12”? The best ck’s
are obtained by taking
ck =
∫ ∞−∞
g∗(x)Rk(x)dx
That’s the average value of g(x) on the interval
k − 12 to k + 1
2:
ck =
∫ k+0.5
k−0.5x2dx
=1
3x3|k+0.5
k−0.5 = . . . = k2 +1
12
43
Equation (A) is approximate because the Rk’s are
too wide, they give only a “coarse grained” repre-
sentation of g(x). If we make the rectangular Rk’s
infinitely thin, infinitely high, and normalized, we
get a complete set. Specifically, let
δ(x− xk) = 1/w if |x− xk| < w/2
= 0 otherwise∫ ∞−∞
δ(x− xk)dx = 1
and take the limit for w → 0. δ(x− xk) is called
a “Dirac delta function”.
44
As it turns out, for any complete set of orthonor-
mal functions ψk, and any function g(x), we have
g(x) =
∞∑k=1
ck ψk(x)
ck =
∫ ∞−∞
g∗(x)ψk(x) dx
However, for the eigenfunctions φj of QM ope-
rators, the definition of normalization is slightly
different. It is
∫ ∞−∞
φ∗j(x)φj(x) dx = 1

45
The function-vector analogy
The concepts of orthogonality, normalization, and completeness are easier to
grasp for vectors. Functions can be viewed as a natural generalization of vectors.
Viewed that way, the concepts of orthogonality, normalization, and completeness
for sets of functions do not seem so strange.
First, consider vectors in two-dimensional (2D) space. The position of any point
in 2D can be given with two coordinates x and y. The arrow that goes from the
origin to that point is a vector which we represent by ~r = |x, y >. Vectors can
also be represented by columns of numbers:
~r =
(x
y
)(12)
The transpose of a vector is that same vector written as a row of numbers. The
notation for the transpose of a vector is like this:
~rT = < x, y| =(x y
)(13)
Instead of ~r, “x” and “y”, it is preferable to use “~x”, “x1”, and “x2”, because
later on we will generalize definitions to the n-dimensional case. So
~x = |x1, x2 > =
(x1
x2
)(14)
~xT = < x1, x2| =(x1 x2
)(15)
The length of a vector is |~x| = (x21 + x2
2)1/2. When |~x| = 1, we say that ~x is
normalized.
By definition, the multiplication of a vector ~x = |x1, x2 > by a number c gives
c~x = |cx1, cx2 >. Geometrically speaking, multiplying a vector by c leaves its
orientation unchanged but changes its length by a factor c.
By definition, addition of two vectors gives ~x + ~y = |x1, x2 > +|y1, y2 >=
|x1 + y1, x2 + y2 >.

46
The inner product ~xT~y of two vectors ~x and ~y is defined as the sum x1y1+x2y2.
The notation is
~xT~y = < x1, x2|y1, y2 > =(x1 x2
) (y1
y2
)= x1y1 + x2y2 (16)
Note that
~xT~y = x1y1 + x2y2 = y1x1 + y2x2 = ~yT~x
~xT~y = ~yT~x
The two basis vectors ~b1 = |1, 0 > and ~b2 = |0, 1 > are normalized and
orthogonal:
< 1, 0|1, 0 > = 1 + 0 = 1
< 0, 1|0, 1 > = 0 + 1 = 1
< 1, 0|0, 1 > = 0 + 0 = 0
Furthermore, ~b1 and ~b2 form a complete set for the representation of 2D vectors
because any vector ~v = |v1, v2 > can be written as a linear combination of ~b1 and~b2.
~v = |v1, v2 >= v1~b1 + v2~b2
Vectors ~b1 and ~b2 are just one of infinitely many possible choices of orthonormal
basis. Geometrically speaking, any two unit length vectors that make a right
angle are orthonormal. For instance, we could take s =√
2/2, and define a new
basis ~c1 = |s, s > and ~c2 = |s,−s >.
< s, s|s,−s > = s2 − s2 = 0
< s, s|s, s > = s2 + s2 = 1
< s,−s|s,−s > = s2 + s2 = 1
Any vector ~v = |v1, v2 > can be written as a linear combination in that new basis

47
with coefficients a1 and a2.
|v1, v2 > = a1|s, s > +a2|s,−s >
For an orthonormal basis there is a simple formula to find the coefficients a1 and
a2. We illustrate it with |v1, v2 > and basis { ~c1,~c2 }.
a1 = ~cT1 ~v =< s, s|v1, v2| >= sv1 + sv2
a2 = ~cT2 ~v =< s,−s|v1, v2| >= sv1 − sv2
|v1, v2 >?= a1~c1 + a2~c2
= (sv1 + sv2)|s, s > +(sv1 − sv2)|s,−s >= |s2v1, s
2v1 > +|s2v2, s2v2 > +|s2v1,−s2v1 > +| − s2v2, s
2v2 >
= |2s2v1, 2s2v2 >
= |v1, v2 >
The definitions and formulas carry over to the general case of vectors in a n-
dimensional space.
|~x| = (~xT~x)1/2 = (< x|x >)1/2
= (< x1, x2, x3, . . . , xn|x1, x2, x3, . . . , xn >)1/2
= (x21 + x2
2 + x23 + . . .+ x2
n)1/2
c~x = c|x1, x2, x3, . . . , xn >
= |cx1, cx2, cx3, . . . , cxn >
~x+ ~y = |x1 + y1, x2 + y2, x3 + y3, . . . , xn + yn >
~xT~y = < x|y >= x1y1 + x2y2 + x3y3 + . . .+ xnyn

48
and one can define a set of n orthonormal basis vectors, for instance,
~b1 = |1, 0, 0, . . . , 0 >~b2 = |0, 1, 0, . . . , 0 >~b3 = |0, 0, 1, . . . , 0 >
. . .
~bn = |0, 0, 0, . . . , 1 >
~bTi~bj = δij
where δij, Kronecker’s delta, is 1 if i = j and 0 otherwise. As before, there are
infinitely many possible choices of orthonormal basis sets. For instance, if the
“. . . ” represent a series of 0’s, we could have:
~a1 = |0.48797,−0.31553, 0.81383, . . . >
~a2 = | − 0.63085,−0.77187, 0.07900, . . . >
~a3 = |0.60324,−0.55196,−0.57571, . . . >
~a4 = |0, 0, 0, 1, . . . , 0 >. . .
~an = |0, 0, 0, . . . , 1 >
As before, we can use an orthonormal basis to represent any vector ~v.
~v =∑
j
cj~bj =∑
j
(~bTj ~v)~bj =∑
j
(~vT~bj)~bj
We can show that the formula for cj is correct:
~v =∑
j
cj~bj or ~vT =∑
j
cj~bTj

49
If we multiply both sides by ~bk on the right, we get
~vT~bk =∑
j
cj (~bTj~bk)
Since the vectors ~bj are orthonormal, ~bTj~bk = δjk and
~vT~bk =∑
j
cjδjk
~vT~bk = ck = ~bTk~v
Now, consider a function f(x) defined over the range 0 ≤ x ≤ 1, for example
f(x) = 2x2 − x3. Suppose we don’t know the formula “2x2 − x3”; instead, we
only know the value of f(x) for certain values of x:
x: 0.000 0.200 0.400 0.600 0.800 1.000
f : 0.000 0.072 0.256 0.504 0.768 1.000
With these values, we can represent f(x) as a 6D vector
|0.000, 0.072, 0.256, 0.504, 0.768, 1.000 > .
Even without knowing “2x2 − x3”, we could use the table for all kinds of appro-
ximate calculations. For instance we could calculate∫ 1
0 f(x)dx:
∫ 1
0f(x)dx ≈ 0.1(0.000) + 0.2(0.072) + 0.2(0.256)
+0.2(0.504) + 0.2(0.768) + 0.1(1.000)
= 0.42000
The true value of the integral is (2 · 13x
3 − 14x
4|10 = 0.4166666. . . . Likewise, if
we had two functions f and g tabulated for the same 6 values of x, we could
approximate the integral of their product:
∫ 1
0f(x)g(x)dx ≈ 1
6(f1g1/2 + f2g2 + f3g3 + f4g4 + f5g5 + f6g6/2)

50
With a more complete table (a “finer grain” description of f) we could do more
accurate calculations. For example, with
x: 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
f : 0.000 0.019 0.072 0.153 0.256 0.375 0.504 0.637 0.768 0.891 1.000
we would get∫ 1
0 f(x)dx ≈ 0.41750:
∫ 1
0f(x)dx ≈ 0.1×
(1
20 + 0.019 + 0.072 + 0.153 + . . .+ 0.891 +
1
21.000
)= 0.41750
and with n = 101 values of f for x = 0.00, 0.01, 0.02, . . . 0.99, 1.00, we get∫ 10 f(x)dx ≈ 0.4166750000. It’s clear that, in the limit of large n, we have a
perfect representation of f(x) and we can make exact calculations. If we also
have infinitely many values of g(x), we can calculate the overlap of f and g using
the inner product formula of vectors.∫ 1
0f(x)g(x)dx =
1
n
(1
2f1g1 + f2g2 + f3g3 + . . .+
1
2fngn
)When n→∞, multiplying the first and last term by 2 makes no difference, and
dividing by n− 1 instead of n makes no difference, so:
∫ 1
0f(x)g(x)dx =
1
n− 1(f1g1 + f2g2 + f3g3 + . . .+ fngn)
=1
n− 1
∑j
fjgj
∫ 1
0f(x)g(x)dx =
j=n∑j=1
fjgjdx
In the limit n→∞, the r.h.s. in the last equation is an integral. We could apply

51
the same reasoning for functions defined over x = 0 to x =∞, or over x = −∞to x = ∞. The conclusion is that, conceptually, a function f(x) can be viewed
as an infinite-dimensional vector. So all the results obtained for vectors carry
over to functions. In particular, if we have a complete basis of (infinitely many)
orthonormal functions φj(x)
< φj|φk > =
∫ ∞−∞
φ∗j(x)φk(x)dx = δjk
then we can write any function f(x) as a linear combination of the φj’s
f(x) =∑
j
cjφj(x)
cj =
∫ ∞−∞
f ∗(x)φj(x)dx =
∫ ∞−∞
φ∗j(x)f(x)dx
52
Chapter 14:
The Postulates of QM
53
We will write the postulates for a single particle in
1D, with spatial coordinate “x” and time “t”, but
they are easily generalized to systems of n parti-
cles in 3D by changing
x⇒ x, y, z
dx⇒ dxdydz
x⇒ x1, y1, z1, x2, . . . , yn, zn
etc.
54
Postulate 1
The wavefunction (wf) Ψ(x, t) completely speci-
fies the state of a system. Ψ∗(x0, t)Ψ(x0, t)dx =
|Ψ(x, t)|2dx is the probability of finding the par-
ticle between x0 and x0 + dx at time t.
In CM, positions x and velocities dx/dt completely
specify the state of a system. (I assume we know
the mass and charge of every particle.)
Note 1.1. Multiplying Ψ(x, t) by eiθ does not
change Ψ∗(x0, t)Ψ(x0, t)dx. So the phase factor
(θ) is immaterial.
55
Note 1.2. Since |Ψ(x, t)|2dx is a probability, we
must have
|Ψ(x, t)|2 ≥ 0∫ ∞−∞|Ψ(x, t)|2 dx = 1
Note 1.3. Ψ(x, t) must be single-valued and smooth:
∂2Ψ/∂x2 is not infinite, or, ∂Ψ/∂x has no discon-
tinuity.
56
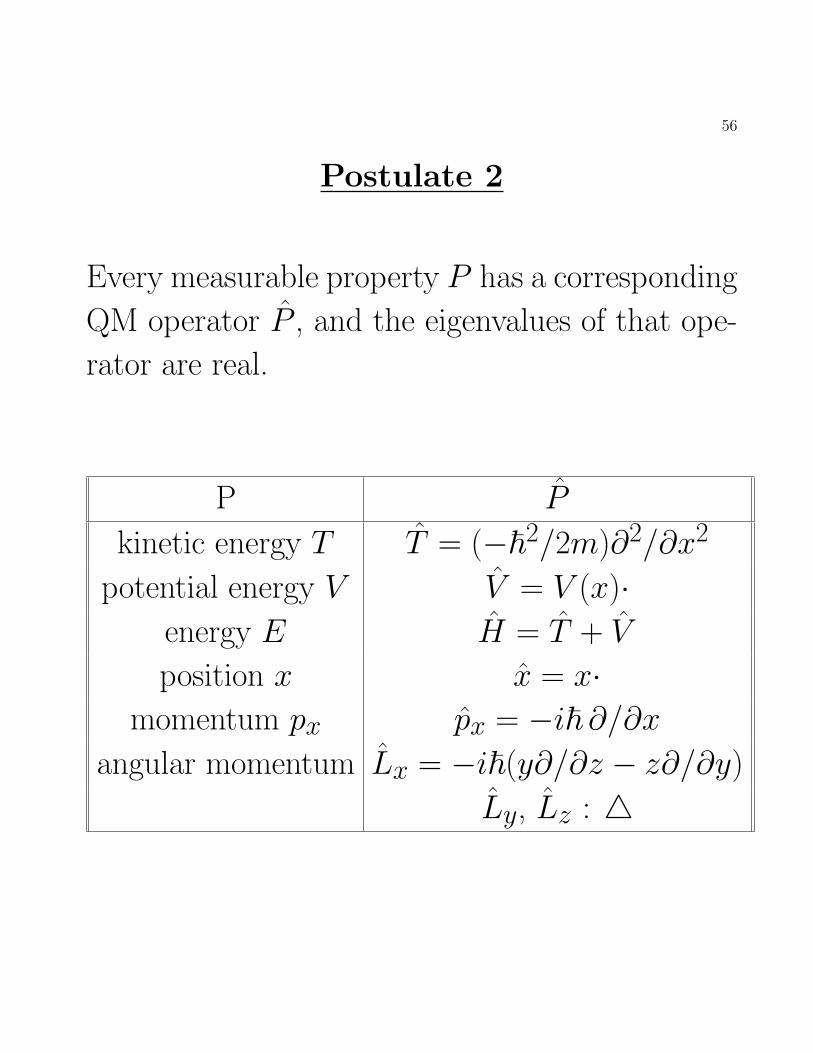
Postulate 2
Every measurable property P has a corresponding
QM operator P , and the eigenvalues of that ope-
rator are real.
P P
kinetic energy T T = (−~2/2m)∂2/∂x2
potential energy V V = V (x)·energy E H = T + V
position x x = x·momentum px px = −i~ ∂/∂x
angular momentum Lx = −i~(y∂/∂z − z∂/∂y)
Ly, Lz : 4
57
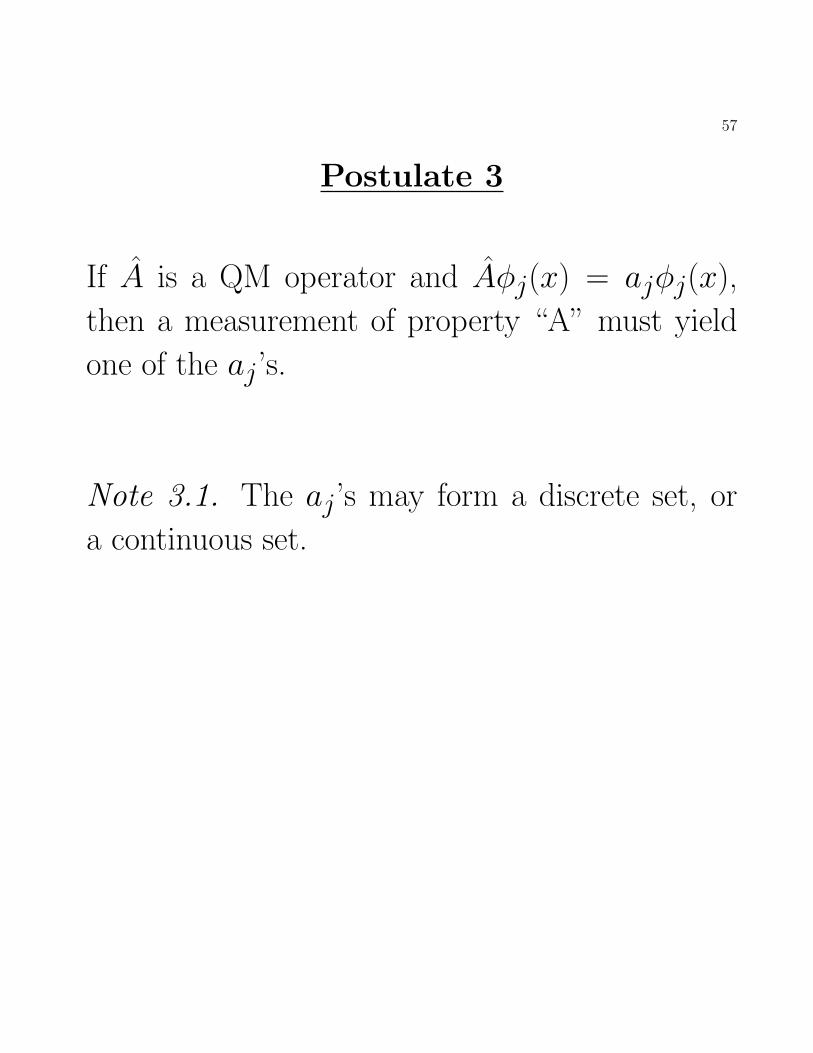
Postulate 3
If A is a QM operator and Aφj(x) = ajφj(x),
then a measurement of property “A” must yield
one of the aj’s.
Note 3.1. The aj’s may form a discrete set, or
a continuous set.
58
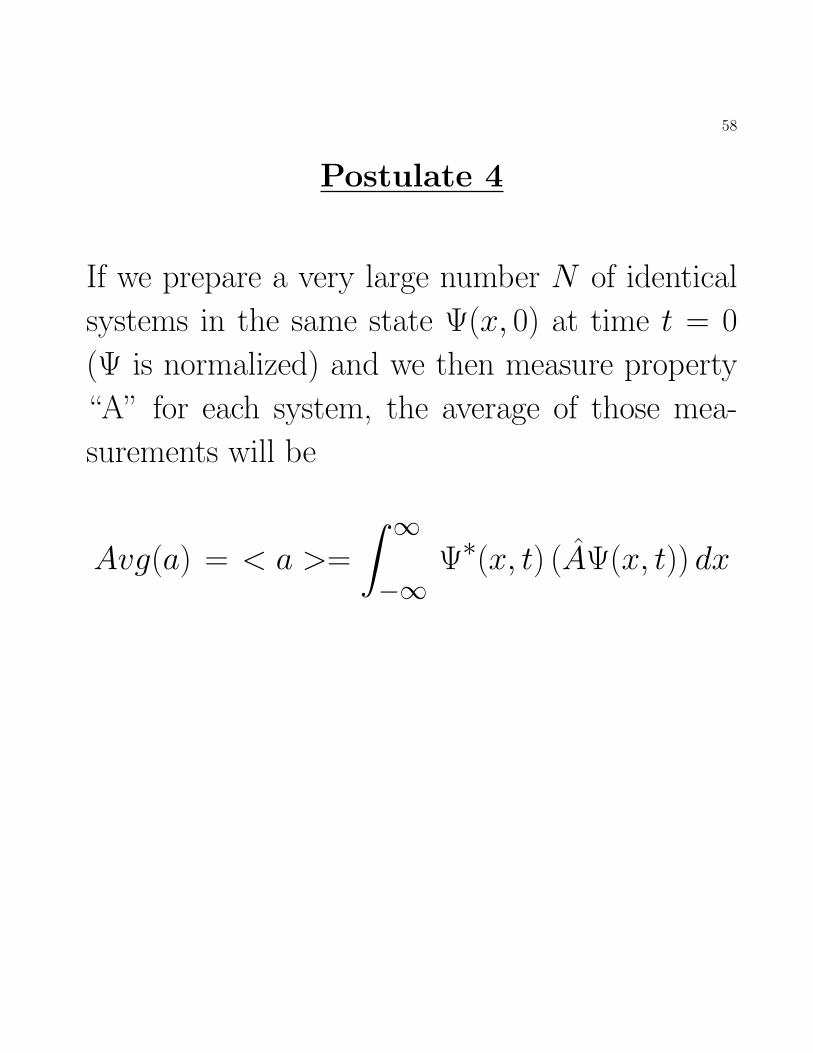
Postulate 4
If we prepare a very large number N of identical
systems in the same state Ψ(x, 0) at time t = 0
(Ψ is normalized) and we then measure property
“A” for each system, the average of those mea-
surements will be
Avg(a) = < a >=
∫ ∞−∞
Ψ∗(x, t) (AΨ(x, t)) dx
59
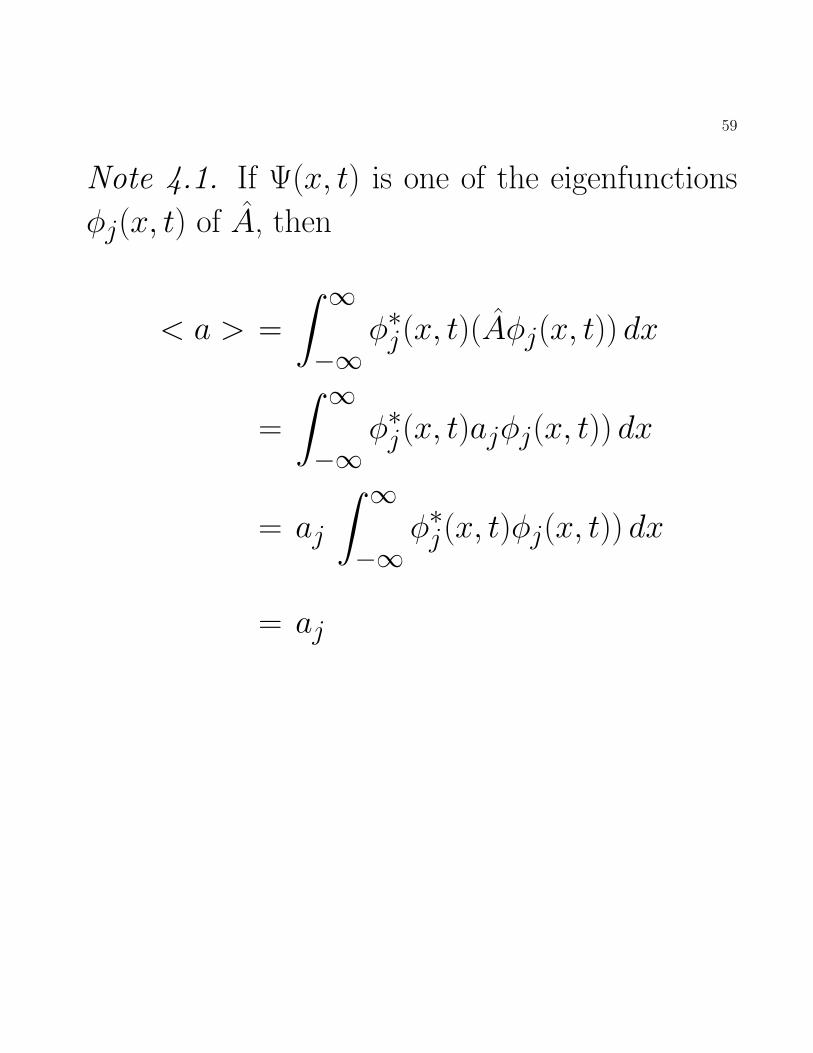
Note 4.1. If Ψ(x, t) is one of the eigenfunctions
φj(x, t) of A, then
< a > =
∫ ∞−∞
φ∗j(x, t)(Aφj(x, t)) dx
=
∫ ∞−∞
φ∗j(x, t)ajφj(x, t)) dx
= aj
∫ ∞−∞
φ∗j(x, t)φj(x, t)) dx
= aj
60
Note 4.2. The eigenfunctions of A form a com-
plete set so we can write
Ψ =∑j
cjφj
< a > =
∫ ∞−∞
∑j
c∗jφ∗j
A
∑k
ckφk
dx
=∑j
∑k
c∗jck
∫ ∞−∞
φ∗j Aφk dx
=∑j
∑k
c∗jck ak
∫ ∞−∞
φ∗jφk dx
The φj’s are orthonormal, so the integral is 0 if
j 6= k and 1 if j = k. We represent this by the
“Kronecker delta” δjk:
δjk = 1 if j = k
= 0 if j 6= k
61
So
< a > =∑j
∑k
c∗jckakδjk
< a > =∑k
|ck|2ak
|ck|2 ≥ 0. We assumed that Ψ and the φj’s are
normalized. In that case
∑k
|ck|2 = 1
|ck|2: probability that the wf Ψ will change to φkas a consequence of measuring property “A”.
62
Note 4.3. Suppose that
Ψ = 0.632φ1 + 0.707φ2 + 0.316φ3
and Hφj = Ejφj with E1 = −10, E2 = −5,
E3 = −1.
< E > = 0.6322(−10) + 0.7072(−5) + 0.3162(−1)
= 0.40(−10) + 0.50(−5) + 0.10(−1)
= −6.60
< E > (and, in general, any property average) is
a weighted average of eigenvalues.
63
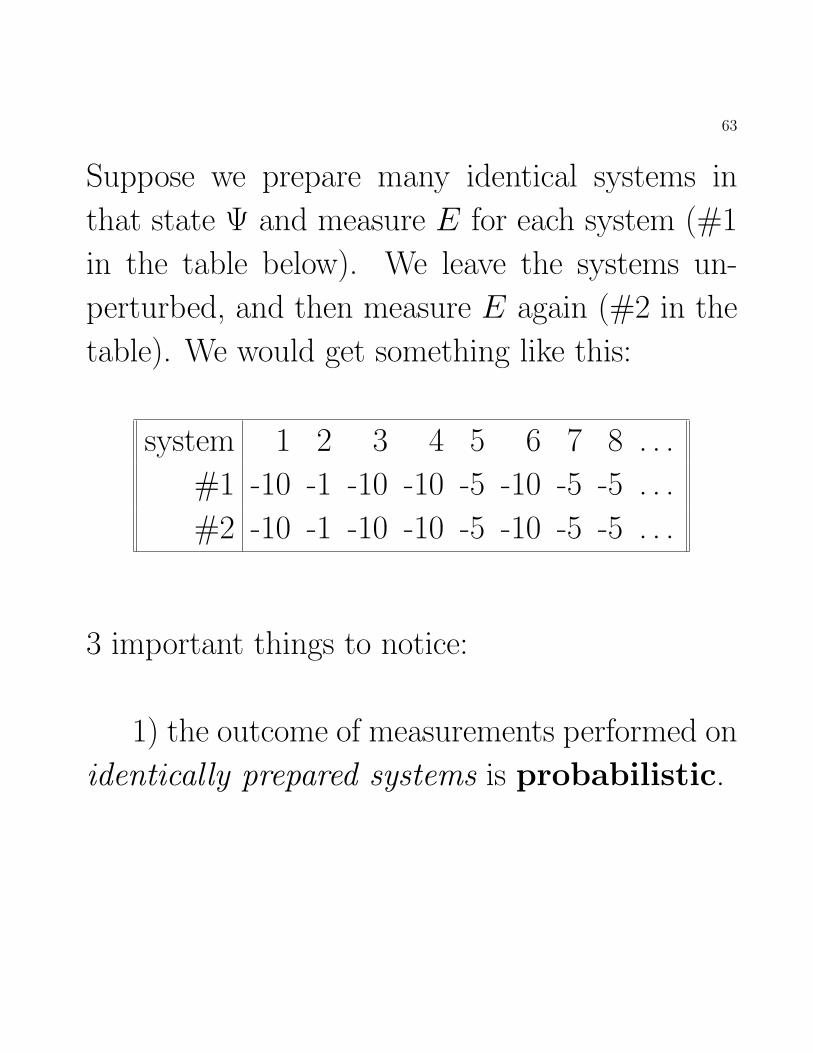
Suppose we prepare many identical systems in
that state Ψ and measure E for each system (#1
in the table below). We leave the systems un-
perturbed, and then measure E again (#2 in the
table). We would get something like this:
system 1 2 3 4 5 6 7 8 . . .
#1 -10 -1 -10 -10 -5 -10 -5 -5 . . .
#2 -10 -1 -10 -10 -5 -10 -5 -5 . . .
3 important things to notice:
1) the outcome of measurements performed on
identically prepared systems is probabilistic.
64
2) measuring property “A” of a system changes
its wf to an eigenfunction of A with eigenvalue aj(−10,−5, or −1 in our example), and aj is the
measured value. In general, measuring a pro-
perty changes the state of the system.
3) If, after the first measurement of “A”, the
system is left undisturbed, every subsequent mea-
surement of “A” will give the same aj.

65
Postulate 5
The time evolution of a system is deterministic
and given by
HΨ(x, t) = i~∂Ψ(x, t)
∂t
66
Note 5.1. Take an operator A, with eigenfunc-
tions Φj(x, t), that does not depend on time.
AΦj(x, t) = ajΦj(x, t)
We can write Φj(x, t) = φj(x)f (t) and preserve
the eigenvalue equation. To show that, substitute:
A(φj(x)f (t))?= ajφj(x)f (t)
f (t)Aφj(x) = f (t)ajφj(x)
Aφj(x) = ajφj(x)
So if A is time-independent it has time-independent
eigenfunctions φj(x).
67
Chapter 15:
QM of simple systems
68
the free particle (FP)
By definition, no force acts on a “free particle”:
F = 0. But F = −dV/dx, so V is a constant.
We are free to choose any value for that constant:
take V (x) = 0.
In CM F = md2x/dt2 = 0, so x = x0 + v0t.
The FP moves at constant speed v0 from left to
right if v0 > 0, and right to left if v0 < 0.
69
In QM we note that V is independent of t and
substitute V (x) by 0 in the time-independent S
equation.
−~2
2m
d2ψ
dx2= Eψ(x)
d2ψ
dx2=
(−2mE
~2
)ψ(x)
ψ(x) equals its own second derivative times a cons-
tant, and it is finite everywhere. So ψ(x) can be
written either as: (i) a combination of sine and
cosine; or (ii) an exponential with imaginary ar-
gument. The latter is easier, so
ψ+(x) = A+ eikx
ψ−(x) = A− e−ikx
k =√
2mE/~
70
Euler’s formula tells us that kx is the argument
of cosine and sine functions, so kx = 2πx/λ.
2π/λ = k =√
2mE/~
E =~2k2
2m
k can be any real value, so E is continuous. Since
V = 0, E is just the kinetic energy of the FP. The
CM expression is E = mv2/2. So
2π/λ =
(2mmv2
2
)1/2
/(h/2π)
1/λ = mv/h
λ = h/mv = h/p
just like the DeBroglie formula.
71
When we get ψ(x) by solving the time-independent
S equation, we can get the full wf by multiplying
ψ(x) by e−iEt/~. Define ω = E/~,
Ψ+(x, t) = A+ eikx e−iωt = A+ e
i(kx−ωt)
The r.h.s. is the equation of a traveling wave going
from left to right. Likewise, Ψ−(x, t) is a wave
traveling from right to left. Ψ+(x, t) and Ψ−(x, t)
are called plane waves. They are constant energy,
constant velocity, waves.
Ψ+(x, t) and Ψ−(x, t) can not be normalized be-
cause they do not go to zero as x → ±∞. Their
square describes a density made of infinitely many
particles: |Ψ+(x, t)|2 = A2+e−ikxeikx = A2
+. If
we setA2+ = 1/2L, then |Ψ+(x, t)|2dx = A2
+dx =
(1/2L)dx, which means that there is one particle
for every 2L units of length.
72
the particle in a box (PIB)
VII(x) = 0 when 0 ≤ x ≤ a and
VI(x) = VIII(x) =∞The S equation is
d2ψ
dx2=
2m
~2(V (x)− E)ψ
d2ψdx2 can not be infinite, so ψ(x) = 0 in regions I
and III. ψ(x) is continuous, so
ψ(0) = ψ(a) = 0
73
The solutions are like for the FP, but now it’s eas-
ier to work with sine and cosine, so
ψ(x) = A sin kx + B cos kx
What are A,B, k?
0 = ψ(0) = A sin 0 + B cos 0 = B (1)
B = 0
0 = ψ(a) = A sin ka (2)
A 6= 0 or else ψ(x) = 0 everywhere. So ka = nπ
and k = nπ/a.
74
Next we use normalization to calculate A.
1 =
∫ a
0|ψ(x)|2 dx
=
∫ a
0A2 sin2(nπx/a) dx (3)
1 = A2[x
2− sin(2nπx/a)
(4nπ)/a
∣∣∣∣a0
= A2(a/2)
A = (2/a)1/2
so
ψn(x) =
√2
asin(nπx/a) n = 1, 2, 3, . . .
75
To find the energies (eigenvalues of H) we calcu-
late Hψ(x)/ψ(x).
−~2
2m
d2ψ
dx2=−~2
2m
(−n2π2
a2
)(2
a
)1/2
sin(nπxa
)
=h2n2
8ma2ψ(x)
So
En =h2n2
8ma2n = 1, 2, 3, . . .