bat algorithm for topology optimization in microelectronic applications
TRANSCRIPT
Bat Algorithm for Topology Optimization inMicroelectronic Applications
Xin-She Yang, Mehmet KaramanogluSchool of Science and Technology
Middlesex UniversityHendon Campus
London NW4 4BT, UK
Simon FongDepartment of Computer and Information Science
Faculty of Science and TechnologyUniversity of Macau
Taipa, Macau
Abstract—In many design applications, designers often haveto find the best geometrical configurations so as to achievecertain objectives with the minimum amount of materials used.Such shape or topology optimization problems are usually muchharder to solve than nonlinear optimization problems in afixed domain. In this paper, we use the recently developed batalgorithm to solve topology optimization problems. Results showthat the distribution of different topological characteristics suchas materials can be achieved efficiently. We have also tested thebat algorithm by solving nonlinear design benchmarks. Resultssuggest that bat algorithm is very efficient for solving nonlinearglobal optimization problems as well as topology optimization.
Index Terms—Bat algorithm, inverse problem, optimizationalgorithm, topology optimization, metaheuristics.
I. INTRODUCTIONIn many engineering design and industrial applications, one
of the design objectives is to design optimal geometricalconfigurations to suit for a particular purpose. For example,in structural engineering, engineers often have to design thebest way that the support beams are placed in the right placesso as to carry the maximum loads, while the bending andshear stresses are within the limits imposed by stringent designcodes. In many cases, design domains are not fixed, andmaterials can be placed anywhere so that the final structure canhave an optimal shape. The geometry or shape of the structureis one of the main design objectives [1], [18]. For example, inmicroelectronic applications, heat transfer can be an importantissue. Even with the best designs from the electronic point ofview, the layout of materials for microdevices can be verychallenging so that designs are also optimal for heat manage-ment. Miniaturization of electronic devices in communicationsmakes it more important to find optimal shape and distributionof materials, or more generally the topology of the designs.Such shape or topology optimization is the main interest
of this paper. In general, topological shape optimization ismuch harder to solve than nonlinear problems in a fixeddomain. The geometrical domain of a topology design problemcan be considered fixed, and they can typically be a regularregion (such as a continuous, rectangular region). However,their design space or search space of the variables can besignificantly larger. For example, we may want to fill arectangular region with two materials, though the geometricaldomain is fixed and can be discretized or subdivided into many
small subregions, say, 10× 10 subregions in a 1 cm × 1 cmsquare. The number of ways to fill each region or not canhave 2100 different combinations. Thus, it is impossible tosearch every combination in practice. Obviously, the geometryconfiguration in a continuous domain can often increase thenumber of degrees of freedom dramatically, which is alsocoupled with nonlinearity and complexity of the problemitself. Consequently, such problems become very challengingto solve.Furthermore, the design objective of an optimization prob-
lem has to be properly formulated. Inappropriate formulationmay lead to solve a different problem, or even a wrongproblem, even with most efficient implementation of opti-mization algorithms. In addition, the evaluation of a givendesign with a set of design variables may be time-consumingif the objective cannot be expressed in any analytical form.In practice, evaluations of the objective often require com-putationally extensive tools such as finite-element simulationsoftware. Conventionally, such problems were either solved byspecific methods such as gradient-based methods together withfinite-element analysis [1], [2], [14]. For example, in structuraltopology optimization, these methods can be very efficient inproducing good designs [14]. However, in the context of heattransfer, such methods can be modified in principle to solvesimilar problems, but they tend to be slow.In different areas such as geophysical applications, inverse
problems are more important, and various specific techniquesexist for inverse parameter estimation [11], [13]. Anotherway of solving topology optimization problems is to considerit as an inverse problem. In an inverse problem, the mainaim is to minimize the differences between observations andpredictions, which is, in fact, an optimization problem. Fortopology optimization, we can parameterize the unknowndomain by an array or matrix of indices where 1 meansthe region is solid, while 0 means that region is hollow (nomaterials). This way, the aim is to use optimization algorithmsto find the index matrix. Obviously, the main objective andall design constraints have to be satisfied simultaneously. Ingeneral, we have a multiobjective optimization problem. Evenin the simplest case, we still have to deal with a nonlinearleast-squares problem.In the framework of optimization, we can in principle
150978-1-4673-5861-3/12/$31.00 ©2012 IEEE

solve a shape optimization problem by using optimizationalgorithms. However, there are many challenging issues suchas well-posedness, incomplete data, non-unique solutions, un-certainty, and improper problem formulation. Mathematicallyspeaking, only well-posed problems with sufficient data willlead to unique solutions. In addition, uncertainty or noise indata can lead to solutions with large uncertainties. In reality,data are often incomplete, and the number of degrees offreedom is large, some extra knowledge of the problem is oftenneeded so that some proper constraints can be added into theformulation. Ideally, we can formulate such problems in sucha way that we can solve them using optimization techniques[1], [7], [15], [17].Another challenging issue is that traditional optimization
methods do not work well for such highly nonlinear problems.One of the reasons is that most traditional algorithms such asgradient-based methods requires derivative information, whichcould be difficult to compute. In addition, almost all traditionaloptimization algorithms are local search algorithms. That is,they tend to converge quickly to a local optimum, often not theglobal optimum. Therefore, these disadvantages of traditionalalgorithms and the challenging issues associated with inverseand topology problems necessitate to try new methods suchas nature-inspired metaheuristic algorithms.Among metaheuristic algorithms, swarm-intelligence-based
algorithms have become especially popular. For example,particle swarm optimization and firefly algorithm are amongthe widely used algorithms [9], [10], [4], [17], [18]. Batalgorithm is another optimization algorithm recently developedby Yang [19], which has good convergence and performance.In many engineering applications, we may want to find goodsolutions quickly, and bat algorithm is particularly suitable forsuch problems as we will demonstrate later in this paper.The remainder of the paper continues as follows: In Section
II, we will discuss briefly topology optimization in the contextof microelectronic applications, while in Section III, we intro-duce the bat algorithm in detail. Then, we use bat algorithmto solve two design problems as benchmarking and validationin Section IV. Then, we proceed to solve the layout problemof two different materials for heat transfer management ofa microdevice in Section V. Finally, we discuss some issuesrelated to topology optimization and topics for further researchin Section VI.
II. TOPOLOGY OPTIMIZATION
Topology optimization, also called shape optimization, canbe in general written as an integral form in terms of an indexvariable u. The objective is to
Minimize∫
Ω
Ψ(q)dΩ, (1)
subject to a set of nonlinear constraints or differential equa-tions [1], [14]. The whole domain can be discretized by adiscrete index q ∈ 0, 1 which only takes 0 (no material)and 1 (filled with a given material). This is often true in
T = 1 T = 0
A
B
Fig. 1. Topology optimization with the maximization of |TA − TB |.
structural shape optimization. In many applications, the ob-jective function does not have any explicit dependence on thedesign variables, and thus the objective cannot be written insimple analytical form. In this case, its dependence is implicitor black-box type. This is especially true for heat managementin microdevices.Heat management, basically heat transfer modelling and de-
sign optimization, is very important for many microelectronicapplications, especially those using large-scale integrated cir-cuits and miniaturization. In fact, nanoscale heat transfer is aninteresting area, and topological optimization for the designof a nanoscale device is even more challenging [22], [16]. Forexample, Evgrafov et al. proposed a topology optimizationbenchmark for a nanoscale heat-conducting system with asize of 150 nm by 150 nm [5]. In real-world applications,heat transfer can occur at many different scales, and heatmanagement at smaller scales may be more difficult to control.Now we extend this benchmark to a standard unit area of 1 mmby 1 mm, and the aim is to distribute two different materials soas to maximize the temperature difference |TA− TB| at thesetwo points A and B under the boundary conditions given in[5] (see Fig. 1).Two materials used in the design of the unit area have heat
diffussivities of K1 and K2, respectively. In addition, K1 ≫K2. For example, Si and Mg2Si, K1/K2 ≈ 10. The domainis continuous under heat flux conditions at the top and bottomboudaries and the objective is to distribute the two materialssuch that the difference |TA − TB| is as large as possible.In order to formulate this shape optimization properly [7],
[8], [11], [12], we can write
Maximize |TA(q)− TB(q)|, (2)
subject to
hj(x, y, q) = 0, (j = 1, ..., J), (3)
gk(x, y, q) ≤ 0, (k = 1, ..., K), (4)
where the parameter/index vector q will be determined byoptimization, subject to J equalities and K inequalities. In
151

addition, (x, y) are the coordinates in the domain Ω.The whole shape domain in 2D can be subdivided intoN by
N small regions/blocks. Inside each block, we use a materialindex q so that 1 means this block is filled, and 0 means thisblock is empty. In essence, this means that the whole domaincan be parameterized by using a material index array q,corresponding to N×N smaller subregions. In principle, suchoptimization can be solved using any efficient optimizationalgorithm. However, as the number of free parameters tendsto be very large, and as the problem is often highly nonlinearand possible multimodal, conventional algorithms such ashill-climbing usually do not work well. More sophisticatedmetaheuristic algorithms have the potential to provide bettersolution strategies [9], [4], [17], [20], [21]. In the rest ofthis paper, we will use bat algorithm to solve two topologyoptimization problems.
III. BAT ALGORITHM
A new bat-inspired algorithm was formulated in 2010 byXin-She Yang [19], which were based on the fascinatingcharacteristics of echolocation of microbats. In order to mimicthe behavour of microbats in the simplest way, some ap-proximations are necessary, and we use the following threeapproximations/assumptions:• For sensing the distance ahead of their flight paths,microbats use echolocation, and they have their uniqueinstinct to distinguish a target of food/prey from thebackground barriers.
• During hunting, bats may travel in a random manner at avelocity vi at position xi with a combination of sensingfrequency fmin, varying wavelength λ and loudness A0
to hunt for prey. The frequency (or wavelength) of theiremitted pulses can be automatically adjusted, and thepulse emission rate r ∈ [0, 1] can also be fine-tunedautomatically, given the current proximity of their target.
• The loudness of echoes by a microbat can be assumed todecay over time from a large and positive amplitude A0
to a small constant value Amin.Another sensible simplification made here is that we do
not use any ray tracing process for computing the time delayand estimating the three dimensional topology. Ray tracingcould have been a useful feature in applications that involvecomputational geometry. In our work here, ray tracing is notadopted due to its very high demand in computational com-plexity especially for multidimensional cases. The followingapproximations are also used, for the sake of simplicity, inaddition to the forementioned. In general the frequency f ina range [fmin, fmax] corresponds to a range of wavelengths[λmin, λmax].
A. Bat MotionFor the bats in simulation, the following rules are defined
for regulating how their positions xi and velocities vi areupdated in a d-dimensional search space. The new solutionsxti and velocities vt
i at time step t are given by
fi = fmin + (fmax − fmin)β, (5)
vt+1i = v
ti + (xt
i − x∗)fi, (6)
xt+1i = x
ti + v
t+1i , (7)
where β ∈ [0, 1] is a vector randomly drawn from a uniformdistribution. After comparing all the solutions among all then bats at each iteration t, a current best solution x∗ thatrepresents the global best solution can be obtained. Thiscurrent best solution corresponds to the best value of theobjective at the current iteration t. As the velocity incrementis defined by the product λifi, fi (or λi) is used to refinethe velocity change while keeping the other factor λi (or fi)constant. The configuration can be readjusted depends on thedomain of the problem of interest. The settings of fmin = 0and fmax = O(1), are used in our experimentation, and againit depends on the domain size of the problem of interest. Arandom value is assigned as the frequency of each bat, whichis taken uniformly from [fmin, fmax].In the local search, a new solution is drawn locally by using
a random walk around the current best solution, and it is thentested to see if it is the best among all the solutions. Therandom walk is defined as
xnew = xbest + ǫ At, (8)
where ǫ is a number vector randomly drawn from [−1, 1].At =<At
i> is defined as the average loudness of all the batsat this time step.The process of the updating the velocities and the locations
of bats are somewhat similar to that of the standard particleswarm optimization. The pace and range of the movementare basically controlled by fi, just like the movement of theswarming particles. To certain extent, the bat algorithm isdeemed to be a balanced combination of swarm optimizationand the intensive local search, that are governed by thefrequency tuning ability and the variables of loudness andpulse rate.Nevertheless, these factors that influence the balance, the
loudness Ai and the pulse emission rate ri, are subject toiterative updates in the optimization process. The value forloudness can be chosen arbitrarily by the user at will, as longas the rules are adhered — the loudness subsides and the pulseemission rate escalates, when a bat is approaching near to itsprey. For simplicity sake, we apply A0 = 1 and Amin = 0.Letting Amin = 0 assumes that a bat has just found the preyhence temporarily pause on emitting any sound. Now we havethe following parameter control [19]
At+1i = αAt
i, rti = r0i [1− exp(−γt)], (9)
where α and γ are constants.Actually, α has the effect of the cooling factor in a cooling
schedule as in the simulated annealing algorithm. For any 0 <α < 1 and γ > 0, we have
Ati → 0, rti → r0i , as t→∞. (10)
For a simplest solution, α = γ can be used. In our simulations,we let α = γ = 0.95.
152
IV. DESIGN OPTIMIZATION
Before we proceed to solve shape optimization problems,let us first validate our bat algorithm by solving two designbenchmarks. In all our simulations, we have used the popu-lation size n = 25 (unless given specifically), α = γ = 0.95,and the total number of iterations as 1000, which gives about25,000 functional evaluations for each case study.
A. Design of a Tensional and Compressional SpringTensional and/or compressional springs are used widely in
engineering. There are three design variables in a standardspring design problem: the wire diameter w, the mean coildiameter d, and the length (or number of coils) L.The objective is to minimize the weight of the spring,
subject to various constraints such as maximum shear stress,minimum deflection, and geometrical limits. For detaileddescription, please refer to earlier studies [1], [3], [6]. Thisproblem can be written compactly as
min f(x) = (L + 2)w2d, (11)
subject to
g1(x) = 1− d3L71785w4 ≤ 0,
g2(x) = 1− 140.45wd2L
≤ 0,
g3(x) =2(w+d)
3 − 1 ≤ 0,
g4(x) =d(4d−w)
w3(12566d−w) +1
5108w2 − 1 ≤ 0,
(12)
with the following limits
0.05 ≤ w ≤ 2.0, 0.25 ≤ d ≤ 1.3, 2.0 ≤ L ≤ 15.0. (13)
Using BA with n = 25, α = γ = 0.95 and 1000 iterations,we have obtained the same or slightly better solutions than thebest solution obtained by Cagnina et al. [3]
f∗ = 0.012665 (14)
withx∗ = (0.051690, 0.356750, 11.287126), (15)
but bat algorithm uses significantly fewer evaluations.
B. Speed Reducer DesignOptimal design of a speed reducer or a gearbox is another
benchmark design problem with seven design variables [3],[6], including the face width (b), module of the teeth (h), thenumber of teeth on pinion (z), the length (L1) of the first shaftbetween bearing, the length (L2) of the second shaft betweenbetween bearings, the diameter (d1) of the first shaft, and thediameter (d2) of the second shaft.The main objective is to minimize the total weight of
the speed reducer, subject to 11 constraints such as bendingstress, deflection and various limits on stresses in shafts. Thisoptimization problem can be written as [6]
min f(x) = f(b, h, z, L1, L2, d1, d2)
= 0.7854bh2(3.3333z2+14.9334z−43.0934)−1.508b(d21+d22)
+7.4777(d31 + d32) + 0.7854(L1d21 + L2d
22), (16)
subject to
g1 = 27bh2z
− 1 ≤ 0,
g2 = 397.5bh2z2 − 1 ≤ 0,
g3 =1.93L3
1
hzd4
1
− 1 ≤ 0,
g4 =1.93L3
2
hzd4
2
− 1 ≤ 0,
g5 = 1110d3
1
√
(745L1
hz)2 + 16.9× 106 − 1 ≤ 0,
g6 = 185d3
2
√
(745L2
hz)2 + 157.5× 106 − 1 ≤ 0,
g7 = hz40 − 1 ≤ 0,
g8 = 5hb− 1 ≤ 0,
g9 = b12h − 1 ≤ 0,
g10 = 1.5d1+1.9L1
− 1 ≤ 0,
g11 = 1.1d2+1.9L2
− 1 ≤ 0.
(17)
In addition, the simple bounds are
2.6 ≤ b ≤ 3.6, 0.7 ≤ h ≤ 0.8, (18)
17 ≤ z ≤ 28, 7.3 ≤ L1 ≤ 8.3, 7.8 ≤ L2 ≤ 8.3, (19)
2.9 ≤ d1 ≤ 3.9, 5.0 ≤ d2 ≤ 5.5. (20)
Furthermore, z must be integers. This is essentially a mixedvariable optimization problem as z takes only integer values,and all the other variables are continuous.The best solutions obtained by bat algorithm with n = 25
after 5000 iterations are
b = 3.5, h = 0.7, z = 17, L1 = 7.3, L2 = 7.8,
d1 = 3.34336445, d2 = 5.285350625, (21)
with
fmin = 2993.7495888, (22)
which are better than f∗ = 2996.348165 obtained by othersin the literature [3], [6].We have seen that, for both test problems, BA has found
the optimal solutions which are either better than or the sameas the solutions found so far in the literature.
153
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
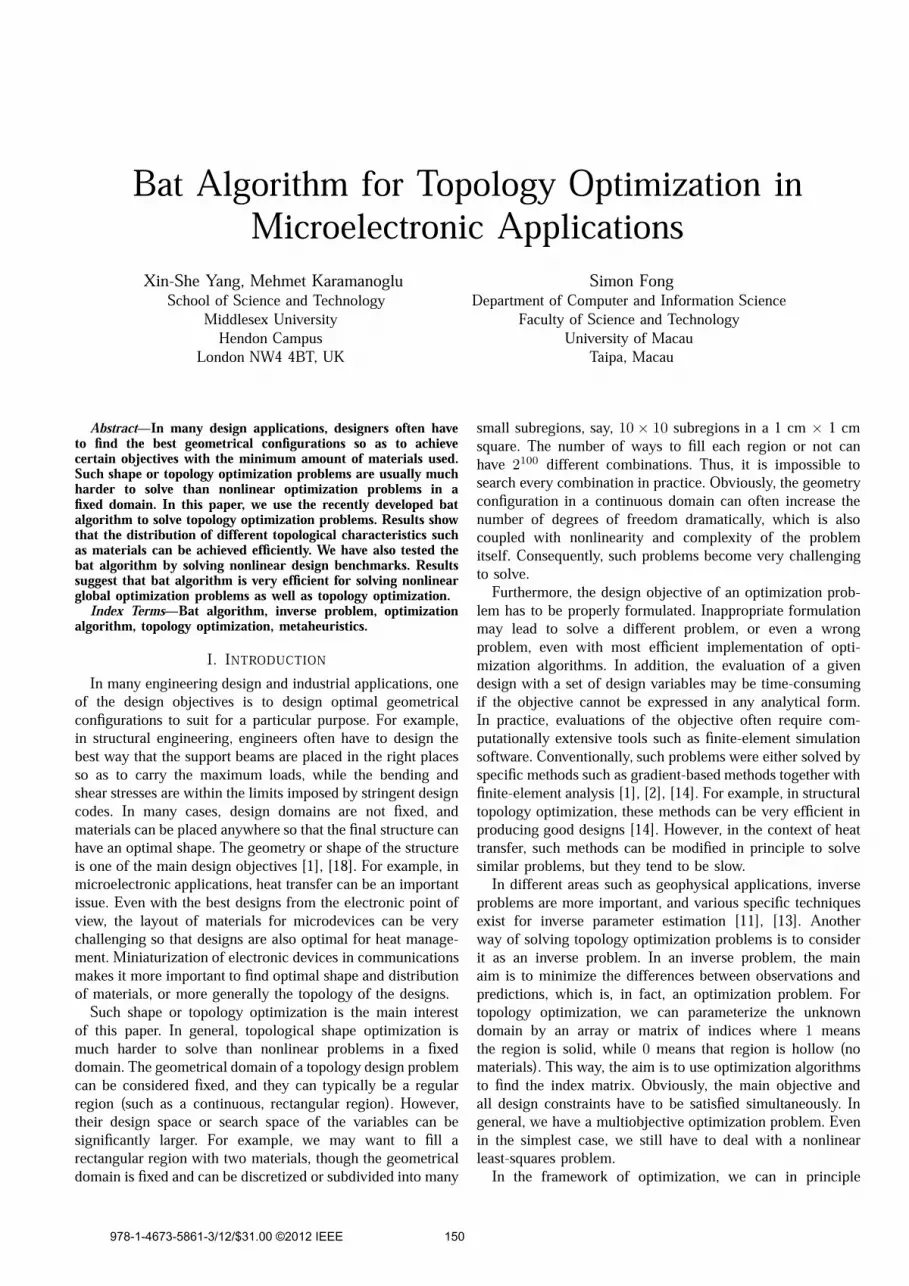
Fig. 2. Initial distribution of two materials: Si (left) and Mg (right).
V. TOPOLOGY OPTIMIZATION FOR HEAT TRANSFER IN AMICRODEVICE
We now solve two topology optimization problems dis-cussed earlier for designing microelectric devices. The mainobjective is to distribute two materials (Si and Mg2Si, withheat diffusivities of K1 and K2, respectively) in the unit areaso that the difference |TA − TB| can be as large as possibleunder the condition that K1 ≫ K2 or K1/K2 ≈ 10.By dividing the domain into 40 × 40 small grids, we can
initialize two materials in an initial distribution as shown inFig. 2.For each configuration generated during the search process,
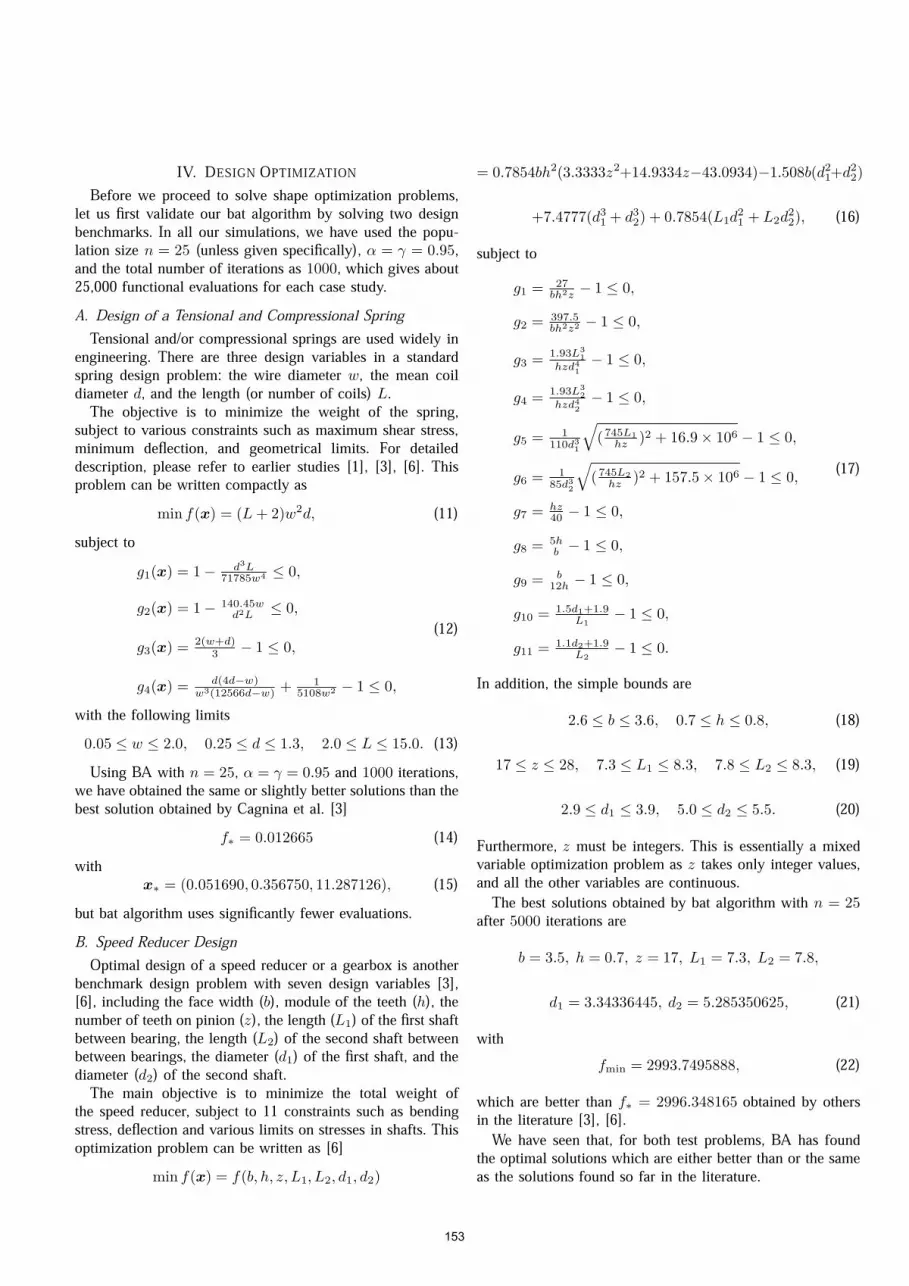
the temperature distribution is estimated using the finite-difference method by solving the heat conduction equationwith varied indices for material conductivities so that thetemperature difference at the two fixed points should be aslarge as possible. The final shape after 1000 iterations is shownin Fig. 3.By using BA with n = 40 to search for the possible design
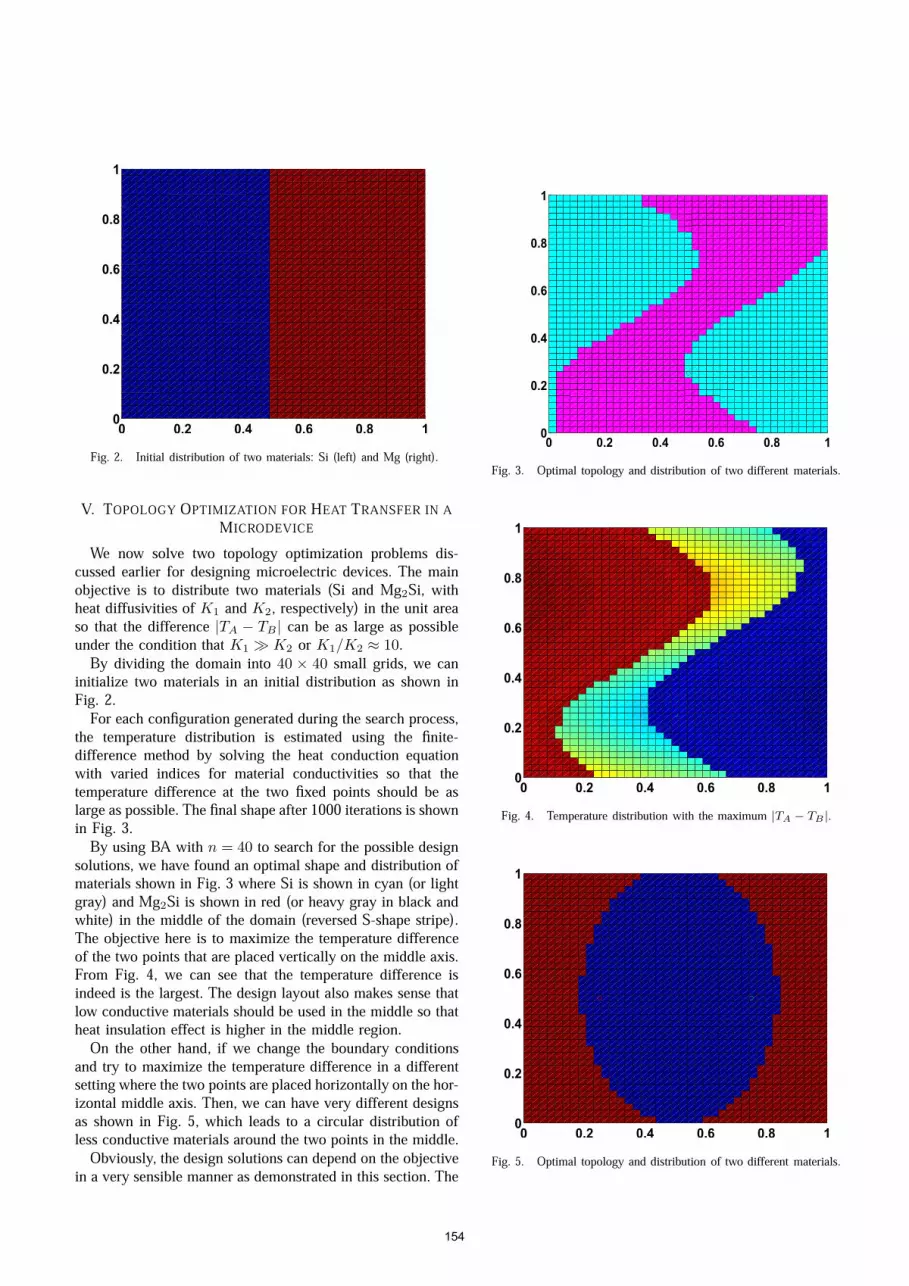
solutions, we have found an optimal shape and distribution ofmaterials shown in Fig. 3 where Si is shown in cyan (or lightgray) and Mg2Si is shown in red (or heavy gray in black andwhite) in the middle of the domain (reversed S-shape stripe).The objective here is to maximize the temperature differenceof the two points that are placed vertically on the middle axis.From Fig. 4, we can see that the temperature difference isindeed is the largest. The design layout also makes sense thatlow conductive materials should be used in the middle so thatheat insulation effect is higher in the middle region.On the other hand, if we change the boundary conditions
and try to maximize the temperature difference in a differentsetting where the two points are placed horizontally on the hor-izontal middle axis. Then, we can have very different designsas shown in Fig. 5, which leads to a circular distribution ofless conductive materials around the two points in the middle.Obviously, the design solutions can depend on the objective
in a very sensible manner as demonstrated in this section. The
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
Fig. 3. Optimal topology and distribution of two different materials.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
Fig. 4. Temperature distribution with the maximum |TA − TB |.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
Fig. 5. Optimal topology and distribution of two different materials.
154

configuration and boundary conditions are the same, but thefinal distribution will naturally depend on the objective we use.
VI. DISCUSSIONS AND FURTHER TOPICS
By formulating a topology optimization problem in termsof an inverse problem and optimization, we have demonstratedthat bat algorithm is efficient in finding the optimal shape toheat transfer design problems in microelectronic applications.From our simulations, there are two important issues that canbe further improved.First, the correct formulation of a problem is important so
that it becomes well-posed with unique solutions. This oftenrequires the incorporation of problem-specific knowledge intothe formulation in terms of proper constraints. Otherwise,multiple solutions are possible, and sometime there may beno solution at all. Therefore, care should be taken to ensurethe proper formulation before starting to solve the optimizationproblem.Another important issue is that we have used N ×N grids
to approach a 2D domain. At the moment, we used N = 40,which gives 402 = 1600 design variables (indices). However,if N = 100 is used, then the scale of the problem willincrease significantly to 1002 = 1, 000, 000. Therefore, a naiveapproach to increase N to get higher accuracy in approx-imating a desired topology will increase the computationalcosts tremendously. This may suggest that the approach ofapproximating the shape is not the most suitable. In fact, inaerospace engineering, other approaches such as B-splines andBezier curves are used as a more efficient way to parameterizewing shapes. This can reduce the number of degrees offreedom significantly, which may form an important topic forfurther research in shape optimization.Furthermore, the problems we have solved are in 2D
only. When extended to 3D, the design space becomes morecomplex. The number of grids will be O(N3). Even with agood parameterized approach, we can have spline surfacesin addition to curves, which still makes it much difficult tohandle. Future research can focus on new ways to formulateshape optimization problems so that the number of designvariables can become minimal, which itself is an optimizationproblem. Obviously, any progress in these areas will enableus to design better products in a diverse range of applications.
REFERENCES
[1] M. P. Bendsøe, Optimization of Structural Topology, Shape and Mate-rial, Springer, (1995).
[2] M. P. Bendsøe and O. Sigmund, Topology Optimization: Theory, Meth-ods and Applications, Springer, Berlin, (2003).
[3] L. C. Cagnina, S. C. Esquivel, and C. A. Coello, Solving engineeringoptimization problems with the simple constrained particle swarmoptimizer, Informatica, 32, 319-326 (2008).
[4] R. C. Eberhart and Y. Shi, Y., Comparing inertia weigthts and constric-tion factors in particle swarm optimization. Proceedings of the IEEECongress on Evolutionary Computation (CEC 2000), San Diego, CA.pp. 84-88 (2000).
[5] A. Evgrafov, K. Maute, R. G. Yang and M. L. Dunn, Topologyoptimization for nano-scale heat transfer, Int. J. Num. Methods inEngrg., 77 (2), 285-300 (2009).
[6] A. H. Gandomi, X. S. Yang and A. H. Alavi, Cuckoo search algorithm:a metaheuristic approach to solve structural optimization problems,Engineering with Computers, 27, article DOI 10.1007/s00366-011-0241-y, (2011).
[7] S. A. Greenhalgh, B. Zhou, and A. Green, Solutions, algorithms andinter-relations for local minimization search geophysical inversion, J.Geophys. Eng., 3, 101-113 (2006).
[8] C. L. Kar, I. Yakushin, K. Nicolosi, Solving inverse initial-value,boundary-value problems via genetic algorithms, Engineering Appli-cations of Artificial Intelligence, 13, 625-633 (2000).
[9] J. Kennedy and R. C. Eberhart, Particle swarm optimization, in: Proc.of IEEE International Conference on Neural Networks, Piscataway, NJ.pp. 1942–1948 (1995).
[10] J. Kennedy, R. C. Eberhart and Y. Shi, Swarm intelligence SanFrancisco: Morgan Kaufmann Publishers, (2011).
[11] M. Sambridge, Geophysical inversion with a neighbourhood algorithm– I. Search a parameter space, Geophys. J. Int., 138, 479-494 (1999).
[12] M. Sambridge and K. Mosegaard, Monte Carlo methods in geophysicalinverse problems, Reviews of Geophysics, 40, 3-1-29 (2002).
[13] J. A. Scales, M. L. Smith, and S. Treitel, Introductory GeophysicalInverse Theory, Samizdat Press, (2001).
[14] O. Sigmund, A 99 line topology optimization code written in Matlab,Structural and Multidisciplinary Optimization, 21(2), 120-127 (2001).
[15] E. G. Talbi, Metaheuristics: From Design to Implementation, JohnWiley & Sons, (2009).
[16] X. S. Yang, Modelling heat transfer of carbon nanotubes, ModellingSimul. Mater. Sci. Eng., 13, 893-902 (2005).
[17] X. S. Yang, Nature-Inspired Metaheuristic Algorithms, Lunver Press,UK, (2008).
[18] X. S. Yang, Engineering Optimization: An Introduction with Meta-heuristic Applications, John Wiley and Sons, USA (2010).
[19] X. S. Yang, A new metaheuristic bat-inspired algorithm, in: NatureInspired Cooperative Strategies for Optimization (NICSO 2010) (Eds.J. R. Gonzalez et al.), Springer, SCI Vol. 284, 65-74 (2010).
[20] X. S. Yang and S. Deb, Cuckoo search via Levy flights, in: Proc. ofWorld Congress on Nature & Biologically Inspired Computing (NaBic2009), IEEE Publications, USA, pp. 210–214 (2009).
[21] X. S. Yang and S. Deb, Engineering optimization by cuckoo search,Int. J. Math. Modelling Num. Optimisation, 1(4), 330–343 (2010).
[22] V. V. Zhirnov, R. K. Cavin, J. A. Hutchby, G. I. Bourianoff, Limitsto binary logic switch scaling - a gedanken model, Proc. of the IEEE,91(11), 1934-1939 (2003).
155