a snake for ct image segmentation integrating region and edge information
TRANSCRIPT
A snake for CT image segmentation integrating regionand edge information
X.M. Pardo*, M.J. Carreira, A. Mosquera, D. Cabello
Departamento ElectroÂnica e ComputacioÂn, Universidade de Santiago de Compostela, Campus Sur, 15706 Santiago de Compostela, Spain
Received 2 August 1999; revised 3 October 2000; accepted 5 October 2000
Abstract
The 3D representation and solid modeling of knee bone structures taken from computed tomography (CT) scans are necessary processes in
many medical applications. The construction of the 3D model is generally carried out by stacking the contours obtained from a 2D
segmentation of each CT slice, so the quality of the 3D model strongly depends on the precision of this segmentation process. In this
work we present a deformable contour method for the problem of automatically delineating the external bone (tibia and ®bula) contours from
a set of CT scan images. We have introduced a new region potential term and an edge focusing strategy that diminish the problems that the
classical snake method presents when it is applied to the segmentation of CT images. We introduce knowledge about the location of the
object of interest and knowledge about the behavior of edges in scale space, in order to enhance edge information. We also introduce a region
information aimed at complementing edge information. The novelty in that is that the new region potential does not rely on prior knowledge
about image statistics; the desired features are derived from the segmentation in the previous slice of the 3D sequence. Finally, we show
examples of 3D reconstruction demonstrating the validity of our model. The performance of our method was visually and quantitatively
validated by experts. q 2001 Elsevier Science B.V. All rights reserved.
Keywords: Deformable models; Segmentation; Edge focusing; Region matching; Computed tomography
1. Introduction
Nowadays there is growing interest in the planning and
simulation of medical procedures in order to achieve mini-
mally invasive therapies. To simulate these procedures it is
necessary to create 3D models of the organs of interest. For
instance, the 3D reconstruction of knee bone structures
taken from a set of tomographic cross sections is necessary
in the computer-aided diagnosis of bones' pathologies and
the surgical planning of prosthesis implants and osteotomies
[12,15,23]. The precision of the 3D solid modeling is essen-
tial for the reliable physiological simulation of speci®c
patients' bones. This simulation involves an analysis of
the stress distribution, usually carried out by means of ®nite
elements [5,17,22]. The use of computational techniques
permits repeatability and precision and, as a consequence,
improves the reliability of the extracted clinical informa-
tion.
The main step of geometry reconstruction is segmenta-
tion, in which the tissues of interest (bones) are identi®ed.
CT scans provide cross section images that clearly distin-
guish the dense cortical bone from soft muscle tissues.
However, dif®culties are encountered in deriving the
geometry of the tibia proximal end (close to knee joint);
injuries, bone loss and the bone's inhomogeneous structure
cause the bone to be nearly indistinguishable from soft
tissue. Further, limitations in the resolution of the CT scan
cause the contours of the tibia and the ®bula to combine.
The construction of the 3D model is generally carried out
by stacking the contours obtained from a 2D segmentation
of each CT slice. Manual segmentation has been used to
extract bone geometry, but it is a subjective and tedious
process. There are a number of methods for segmenting
CT images, but, usually, a manual correction has to be
carried out in the bone contouring process. From these
methods, thresholding approaches are the simplest. They
provide binary images composed of regions that identify
objects segregated from the background. Their major draw-
back is the lack of local adaptability; pixels of the same
tissue may exhibit different intensities between slices and
even within the same slice. It is generally necessary to post-
process the image using mathematical morphology [3], and/
or combining thresholding with region growing [37]. Edge-
based methods allow delineation of regions through the
location of their contours as points of high gradient, but
Image and Vision Computing 19 (2001) 461±475
0262-8856/00/$ - see front matter q 2001 Elsevier Science B.V. All rights reserved.
PII: S0262-8856(00)00092-5
www.elsevier.com/locate/imavis
* Corresponding author. Tel.: 134-981-563-100; fax: 134-981-599-412.
E-mail address: [email protected] (X.M. Pardo).

they have a high sensibility to noise, particularly between
regions with small contrast differences, and need gap clos-
ing methods to link edges belonging to the same boundary
[29]. Region-based methods yield parts of the image that
meet the requirements of a given uniformity criterion. One
of the most widely used techniques in this category is region
growing. In its simplest form, the method starts with a small
region and then examines its neighborhood in order to
decide whether or not they have similar features. If they
do, then they are grouped together to form a new greater
region. It has two drawbacks: ®rst, post-processing is
usually required to cope with infra- and over-segmentation,
generally applying domain knowledge [13,33], and second,
it also suffers from bad location of boundaries.
Segmentation of 3D images into 3D regions is similar to
segmentation of 2D images into 2D regions, and the same
kind of methods can be used [30]: thresholding, determina-
tion of boundary surfaces and extraction of volumetric
regions. Results obtained using these classical approaches
are often not satisfactory, because of the unequal scanning
resolution, which causes discontinuity in the input scene, so
restricting direct usage of 3D operations. An interpolation is
usually performed to achieve the same resolution in the
longitudinal dimension as is available in cross sections,
but this generally produces diffuse contours and gray level
discontinuities.
The dif®culty of segmentation is an aspect of global/local
duality. Consideration of local features can lead to over-
segmentation, and erroneous fusions (infra-segmentation)
can be obtained using only global features. To tackle the
problem of obtaining a trade-off between infra/over-
segmentation, (local) edge information and (global) homo-
geneity information must be combined during image
segmentation; region- and edge-based methods are consid-
ered as complementary approaches [10,24,28,36].
Moreover, a meaningful segmentation must take into
account high level descriptions of the objects [9]. A robust
system must be driven both by data and model, and deform-
able model approaches provide a simple and effective way
of doing it [21].
The main goal of this work is to develop an automatic and
robust snake-based approach for 3D segmentation of the
tibia and the ®bula from a set of parallel CT slices. The
method provides repeatable, faster and more objective
results than any manual or semi-automatic contour
delineation.
This work is structured into the following sections: in
Section 2 we describe the characteristics of the images we
will work with, introduce a background theory of snakes and
®nally describe our model. Then, in Section 3, we present
examples of the results obtained with our method, and
®nally, a discussion and the conclusions of the present
work are shown in Section 4.
2. Material and methods
The characteristics of the images we will work with can
be seen in Fig. 1, where we can identify the tibia, ®bula,
cortical bone and trabecular bone. The width and high
density of the cortical bone together with the clear separa-
tion between the tibia and the ®bula (Fig. 1(b)) make the
tibia segmentation in the distal end fairly easy. As we
approach the proximal part of the tibia, the thickness of
the cortical bone decreases and the distance to the ®bula
is reduced. Typically, images of slices with injuries (bone
loss, cortical bone narrowness, malformations, etc.) show
poorly de®ned external bone contours, little separation
between the internal and external contour of the cortical
bone, and incomplete borders between different bones
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475462
Fig. 1. Scheme of low knee bones: (a) cross section close to the proximal end; and (b) cross section close to the distal end.

(tibia and ®bula, tibia and femur). Fig. 1(a) illustrates some
of these problems. In a snake-based approach, the contour
can be trapped by spurious edge points. This makes the ®nal
result very sensitive to the initial conditions. For a correct
delineation of the contour, the ®tting to the external side of
the cortical bone is of paramount importance [25]. When
processing slice sequences, the contour in the previous slice
can be used as the initial deformation state in the present
slice [2], but approximation problems arise when injuries or
deformations appear. Although the classical edge-oriented
deformable contour models have demonstrated high ef®-
ciency in the segmentation of biomedical structures, they
are not free of limitations [20]. In damaged areas of bones or
in the boundary between different bones (tibia and ®bula),
the border information can be incomplete or even be
completely lost. Since the classical snakes are based on
gradient information, they share the limitations of edge
detectors. Ronfard [32] proposed a new deformable model
that uses no edge information, but local computations
around contour neighborhoods (region information). Statis-
tical models of object and background regions are used to
push the model towards border points. Region information
can provide clues to guide the evolution where gradient
information vanishes (homogeneous areas). This method
was proposed for the case of step-edges but can not distin-
guish boundaries between objects of similar features. Ivins
and Porril [14] proposed a related approach where a snake is
driven by a pressure force that is a function of the statistical
characteristics of image data. The model expands until it
®nds pixels that lie outside user-de®ned limits relative to
the statistical characteristics of a seed region; when these
limits are crossed the pressure force is reversed to make the
model contract.
Region features present the advantage of being less sensi-
tive to noise. Their inconveniences reside in that the change
of the pixel characteristics that suggest the presence of a
contour remains diluted in the global character of the region
features. This frequently provokes the undesired merging of
regions. This problem can be alleviated with gradient/edge
information. Chakraborty et al. [8] proposed a deformable
boundary ®nding approach that integrates region and edge
information for the segmentation of homogeneous struc-
tures surrounded by a single background. This approach
must know a priori which regions belong to the object of
interest. This idea is extended to 3D in Ref. [34].
A unifying framework that generalizes the deformable
model, region growing and prior matching approaches was
proposed by Zhu et al.[38]. The method combines local and
global information, and local and global optimization. It can
be applied both for obtaining global segmentation of images
and ®nding individual regions. However, the ®nal solution
does not consider shape information.
Most of the above approaches use prior models for their
region-based statistics, which limits usefulness in situations
where a comprehensive set of priors is not available. In case
of bone segmentation the object of interest is a heteroge-
neous structure (bone) made of different tissues with differ-
ent texture features, and we do not know a priori the
statistics of all the tissues that belong to the bone. Some
of the bone tissues appear in a CT image with texture
features similar to soft tissues; cortical bone statistics
change from slice to slice (due to bone loss, injuries, etc.),
different bones (tibia and ®bula, for instance) have similar
statistics, etc. So region information must be used in a
different way. In this work we present a new deformable
contour approach that uses an approximated initial model
and combines region and edge information in a cooperative
way to solve the problems of delineating the external side of
the cortical bone of the tibia and the ®bula from CT scan
images. We introduce knowledge about the location of the
object of interest and knowledge about the behavior of
edges in scale space in order to enhance edge information.
We also introduce a region information aimed at comple-
menting edge information that does not rely on prior knowl-
edge about image statistics; the desired features are derived
from the segmentation in the previous slice.
2.1. Classical deformable contours
A snake [16] is an elastic curve that, located over an
image, evolves from its initial shape and position as a result
of the combined action of external and internal forces. The
external forces lead the snake towards features of the image,
whereas internal forces model the elasticity of the curve. In
a parametric representation, the snake appears as a curve
u�s� � �x�s�; y�s��; s [ �0; 1�; with u�0� � u�1�: Its internal
energy is often de®ned as
Eint�u� �Z1
0�auus�s�u2 1 buuss�s�u2�ds:
It is made up of two factors: the membrane energy
auus�s�u2; which weights its resistance to stretching, and
the thin-plate energy, buuss�s�u2; that weights its resistance
to bending. us(s) and uss(s) represent the ®rst and second
derivatives, respectively. The elasticity parameters a and
b control the smoothness of the curve.
The external energy is generally de®ned as a potential
®eld P,
Eext�u� �Z1
0P�u�s�� ds:
Typical terms in the expression of the external energy are
[11,31]:
PI � ^gI�u�s��; �1�where I is the intensity image, and attracts the curve to high
or low intensity points;
PG � 2zu7�Gs�u�s�� p I�u�s���u; �2�where Gs represents a Gaussian ®lter with a scale parameter
s , and attracts the curve to intensity edges, after
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475 463

convolution with a Gaussian smoothing; and
PE � 2he2d�u�s��2; �3�
where d(u(s)) is the distance to the closest boundary point,
which pushes the contour to the edge points belonging to a
contour image in which edges are detected by means of an
edge detector ®lter.
Parameters g , z , h in Eqs. (1)±(3) are positive constants
that weight the contributions of the different terms in the
external energy. The total energy of the snake will be the
sum of the external and internal energies along the curve
u(s):
Esnake � Eint�u�1 Eext�u�:The solution to the problem of detecting the contour is
found in the minimization of this energy function. In order
to numerically compute a minimal energy solution it is
necessary to discretize the expression of the energy. So
from the curve u(s) a set of N control points, vi � �xi; yi�; i �1;¼;N; is chosen. The selection of these points can be
carried out so that they are evenly spaced in the parameter,
s, of the curve (u�s� ! vi; i � 1;¼;N; so that uvi 2 vi11u �Ds�; so Ds £ N equals the size of the curve u(s).
2.2. A snake model for CT image segmentation
Classical potentials do not hold enough information to
tackle the bone segmentation in CT images. In order to
endow the snake with enough ability to manage this
problem, we have introduced new external energy terms.
The external energy is chosen to combine region and gradi-
ent/edge information in order to make the whole procedure
more robust to noise, low contrast and bad initialization. We
will use the two classical potential terms PI and PG
described in Eqs. (1) and (2), and two more, PR and PE0:
PR will introduce region information and PE0 will modify PE
in Eq. (3), considering directional derivative information.
Moreover, we have introduced an edge focusing process
in the generation of the edge map used to calculate PE0: In
this way we substantially reduce the number of inadequate
snake attractors (noisy and weak edges). In the following
subsections the computation of each new potential term is
explained.
2.2.1. Edge external energy �PE0�
Edge information, used to compute the edge potential, is
usually obtained using a single scale edge detector without
any constraint in edge location. However, this information
can be enhanced. On the one hand, features of the same
object appear at different scales, therefore each part of the
image needs to be ®ltered in a different way and an optimal
single scale does not exist. So we will obtain the edge map
by combining the outputs of the edge detector using differ-
ent scales. On the other hand, it does not distinguish among
edges belonging to different objects, so undesired snake
attractors can be generated. We will use knowledge about
the location of the edges of interest. In this way, we will
retain only edges belonging to the object of interest and thus
the edge information will be more valuable for deriving the
edge potential.
Next, we will describe the procedure to select edge infor-
mation (edge map focusing) and the modi®ed edge poten-
tial.
Edge map focusing. To obtain the edge map, a Laplacian
of the Gaussian (LoG) ®ltering [19] is applied to the original
image,
LoG�x; y;s� � 7 2�G�x; y;s� p I�x; y��:So, edge locations correspond to zero-crossings in the
®ltered image and each edge point is characterized by its
intensity gradient. The LoG ®lter combines a smoothing
process with the detection of intensity changes to make
the detection less sensitive to noise. Multiscale edge detec-
tion has been proposed to detect edges at several spatial
scales [7,19]. We will try to integrate all this information
taking into account both knowledge about the behavior of
edges in scale space [18] and a priori knowledge about the
domain. Fig. 2 shows the block diagram of the strategy
proposed to detect salient edges in the image. First we detect
the zero-crossings of the LoG ®lter using different scales,
then we perform a focusing on salient edges over each scale
image using a set of constraints and, ®nally, we integrate
information from all scale focused images to provide the
salient edges image.
The edge detector block performs the extraction of edges
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475464
Fig. 2. Edge focusing scheme: The Edge detector block provides a set of
edge images after obtaining zero-crossing of the LoG ®lter with different
scales. The Focusing block retains the salient edges for each of the afore-
mentioned images. The Analysis in scale space block provides a unique
edge image after integrating information from different scales.

at different scales, providing edge images Iis1;¼; Iisn
for
each slice i. It is necessary to choose the scale parameter
sequence {s1;¼;sn}; �s1 . ¼ . sn�; that veri®es the
following constraints [18]:
² each edge curve of interest must exist in Iis1;
² Iis1must contain few irrelevant zero crossing curves;
² {Iis1; Iis2
;¼; Iisn} should provide enough information to
recover the accurate shape and location of the curve of
interest;
² n must be the minimum integer that meets the require-
ments of the aforementioned conditions.
The number n and values s j of scale parameters are
chosen so that neither loses any important edges and so
that noisy details do not remain. If the maximum scale para-
meter is too large, some signi®cant edges may get lost; if it
is too small, too many details and noise will be generated
[4]. We have chosen three values {s1 � 1; s2 � 2; s3 �3} as a compromise between these two facts.
The Focusing and Analysis blocks of Fig. 2 tackle the
problem of retaining only salient edges, using knowledge
about the domain and knowledge about the behavior of
edges in scale space. Both are represented as a set of f
constraints. In this way we will transform, for each slice i
and each scale s j, its initial edge map Iis jinto a ®nal edge
map Ifis j
satisfying all the f constraints, where Ikis j
is the edge
map in slice i, with scale s j, after applying the k ®rst
constraints, and I0is j� Iis j
is the initial edge map.
The ®rst constraints, embodied in the Focusing block of
Fig. 2, reduce the number of edges by tempering the effect
of noise, ®ne details and trabecular structure. The inputs to
this block, for slice i, are the edge maps Iis jcorresponding to
each scale s j of the ®lter, and the outputs are the salient edge
maps Ifis j; as shown in Fig. 2.
We will describe the focusing process for a slice i
and a scales j, Iis jcoming from the edge detector block of Fig.
2. The transformation carried out by the Focusing block is]
made up of a set of operations (projections). For each
constraint k, we de®ne a projection operator Pk, which
transforms the contour map Ik21is j
to the nearest map Ikis j
satisfying the corresponding constraint k.
The ®rst projection operator P1 performs the amplitude
constraint discarding noisy edges and edges due to weak
transitions in the following way:
I1is j�x; y� � P1�I0
is j�x; y�� �
1 : I0is j�x; y� . tg
0 : I0is j�x; y� # tg
8<: �4�
where tg represents a gradient threshold. A value could be
given to tg following different criteria: a heuristically
derived constant, a percentage of maximum gradient value
or a value related with the average value on the previous
slice ®nal contour. When the original image sequence is
completed with interpolated slices (to increase the longi-
tudinal resolution of volume data) we found that the second
method is the best.
A support constraint is introduced to take advantage of
the small distance between slices from which the ®nal
contour segmentation obtained in the previous slice should
be a good approximation to I2is j: This constraint integrates
knowledge about the location of the contour. We have
implemented this constraint through three projection func-
tions P2, P3 and P4, as follows:
I2is j�x; y� � P2�I1
is j�x; y��
�1 : I1
isj�x; y� � 1 AND iI1
isj�x; y�2 I
f�i21�s j
�x; y�i # ts
0 : I1is j�x; y� � 0
0:5 : otherwise
8>>><>>>:�5�
I3is j�x; y� � P3�I2
is j�x; y��
�1 : I2
is j�x; y� � 1
1 : I2is j�x; y� � 0:5 AND I2
is j�x 1 dx; y 1 dy� � 1
0 : otherwise
8>>><>>>:�6�
I4is j�x; y� � P4�I3
is j�x; y�� � 1 : I3
is j�x; y� � 1
0 : otherwise
(�7�
with dx, dy [ {0; 1}: P2 tries to retain edges close to the
®nal contour of the previous slice, introducing the inter-slice
distance by means of the parameter ts. The greater the inter-
slice distance, the greater the value of ts. If an edge point is
not close to an edge point in the previous slice, it is not
eliminated. The goal of P3 is to recover full edge segments
that have some edge points close to the approximated
previous contour. Little offsets are applied to each point
(x,y) in order to ®nd edges close by. They are iteratively
applied until no changes occur in edge estimation. In this
way, an edge point with value 0.5 can get value 1 if it
belongs to an edge segment having some points with this
value. Finally, operator P4 eliminates spurious edge points
(value 0.5 in I3is j� that are distant from the model. So P4
discards edge points belonging to edge segments that do
not have correspondence in the previous slice. In this way,
a ®nal image Ifis j
is obtained as f � 4 in our case.
We could think about joining P3 and P4, but the iterative
nature of P3 requires a separated process. To merge the two
projectors in a single one the operation should be edge-
segment based, not edge-point based as we have implemen-
ted it.
The image set Ifis1
;¼; Ifisn
is the input to the Analysis
block of Fig. 2, where the integration of information in
scale space, for slice i, is implemented. This integration
leads to the unique edge map Ifi : We have followed an
integration scheme based on the knowledge of edge
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475 465
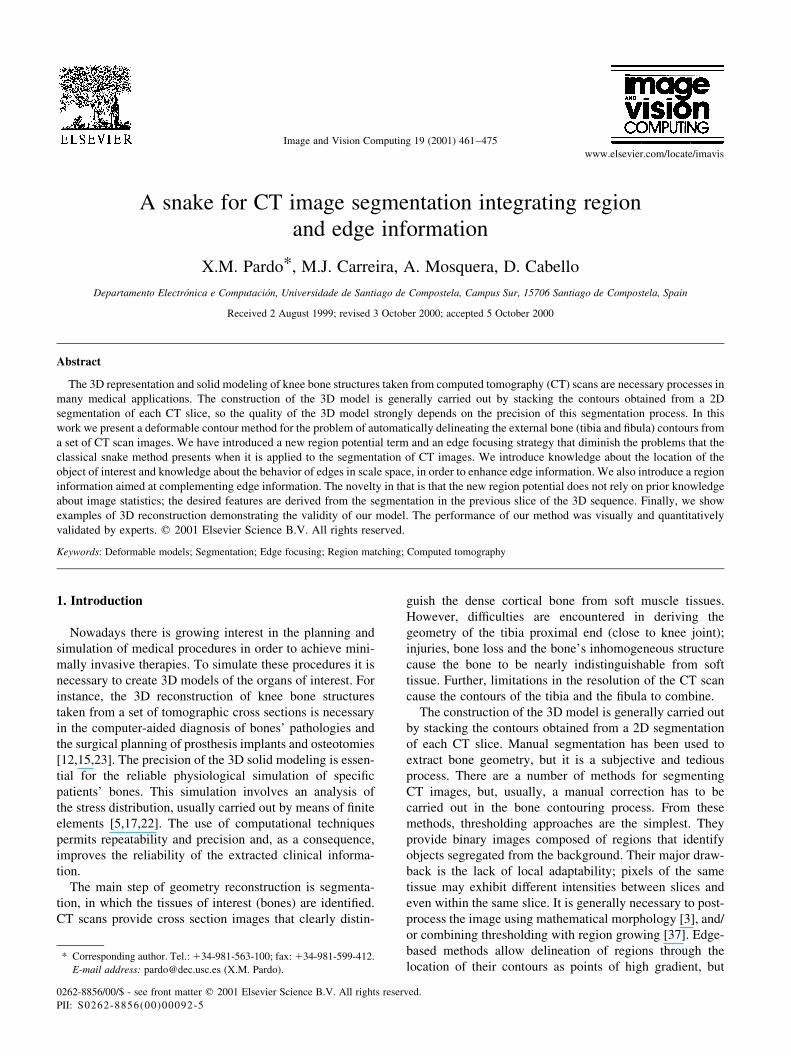
behavior in scale space [18], starting with the location of
edge points obtained with a large scale and re®ning their
location using information from lower scales. The system
starts by considering the two highest scales and applies a set
of procedures for correcting edge locations (CEL), recover-
ing missing edges (RME), and removing noise and false
edges (RNFE). The CEL procedure searches, for each
edge in the highest scale, its nearest one in the lowest
scale. The RME procedure recovers, in the lowest scale,
edge segments that do not correspond to the highest scale
but are connected to edges remaining after CEL. We have
not applied the RNFE procedure because it can end up
removing edges of interest. The resulting edge map is
again combined with the one obtained in the next scale.
The process ®nishes after integrating the information of
the lowest scale. An example of the whole process applica-
tion can be seen in Fig. 3. Edge information Ifi shown in
Fig. 3(i) is much more accurate than raw edge information
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475466
Fig. 3. Edge focusing example: (a) original image; (b) contour model (®nal contour of previous slice); (c)±(e) edge maps for three different scale parameters
(s � 1; 2; 3; respectively); (f)±(h) edge focusing after applying constraints to edges (c)±(e), respectively; (i) ®nal edge map after integrating information from
edges (f)±(h).

�Iis1; Iis2
; Iis3� in Fig. 3(c)±(e) and �I f
is1; I
fis2
; Ifis3� Fig. 3(f)±
(h). From this edge map we can derive an edge potential as
in Eq. (3). However, a more convenient external energy can
be obtained as will be set out below.
Modi®ed the edge potential, PE0: One of the problems in
deformable contour methods that must be addressed is the
bad initialization, which could cause the snake to fall into a
local minimum. When trying to determine the external
contour of a bone, these problems occur if the initial contour
is positioned inside the cortical bone, or when this contour is
located between two different bones (for instance, the tibia
and the ®bula). In those cases, the classical edge potential PE
does not discriminate between internal and external
contours.
To mitigate problems of bad initialization, the use of
directional information in snakes have been independently
proposed by different authors [25,31,35]. In Ref. [25] we
have proposed an external energy term to distinguish
between internal and external contours of any bone structure
as well as to locate the desired bone boundary even in the
case of con¯icting structures located close to the desired
bone. Its expression for a vertex vi is as follows:
P 0E�vi� � he2d�v�i��2 ´min 0;2
2~nI�vi�
� �; �8�
where ~n represents the direction normal to the snake and
d(v(i)) is the distance to the closest boundary point, as in Eq.
(3). When the structure has double contours, this new energy
term presents the minimum value in the exact position of the
external contour seen from the curve's mass centre
(centroid). When the initial model is located between two
close structures, for example the tibia and the ®bula, this
potential term attracts the curve towards the contour that is
closest to the centroid of the snake. The curve is attracted
towards the external contour of the tibia if the initial model
corresponds to the contour of the tibia in the previous slice,
and towards the external contour of the ®bula if the initial
model corresponds to the ®bula in the previous slice.
We take min{0; �2=2~n�I�vi�} to avoid undesired bound-
aries preventing the snake from evolving towards the
features of interest. While PE (see Eq. (3)) is a constant
potential image, PE0 sees edges in a different way depending
on the direction of the normal to each snake's vertex.
2.2.2. Region energy, PR
As formerly, edge-detection and region-growing techni-
ques can be used together to produce more accurate and
repeatable segmentation. Primitive methods use only local
properties of pixels to grow regions. More sophisticated
techniques grow regions by merging smaller subregions.
The effectiveness of region-growing algorithms depends
on the application. If the image is simple enough the local
techniques can be very effective. However, on complicated
images even the most sophisticated techniques may not
produce a useful segmentation. In this case, region growing
is sometimes used together with more knowledgeable
processes [26].
In this approach, the region information arises from a low
level region-based segmentation where each pixel in the
image is classi®ed into one of a number of classes. From
all the approaches to region-based segmentation, we have
performed the region segmentation of CT knee images using
a self-organizing feature map [6]. This Kohonen neural
network carries out a competitive learning process that clas-
si®es the image pixels into different tissue types. The train-
ing involves modifying the weighting vector for each output
node that is marked for a given input. The label associated to
each node is its position in the array of output nodes. Each
step in the learning process updates all weight vectors in the
neighborhood of the winning output node, so neighboring
nodes learn close bone patterns. This characteristic and the
fact that we use one feature (density) and a 1D topology of
the neural network guarantee the ordering of labels. In this
way, when the label value increases, we go from soft to hard
tissues or vice versa, but always keeping the ordering in
density. Since the bone is an heterogeneous structure
made up of several tissues, and some bone tissues could
have texture features similar to soft tissues (muscle), the
low level classi®cation produces an over-segmentation.
However, this over-segmentation brings additional informa-
tion to the snake model: ®rstly, it is able to guide the direc-
tion of snake evolution in homogeneous parts where edge/
gradient vanishes, and secondly, it makes the snake deline-
ate the bone taking into account texture features of internal
and external regions. We will show an example of region
segmentation later.
To obtain the region potential we proceed in the follow-
ing way. First, for each region border point in the previous
slice, pi21, we look for the corresponding region border
point in the actual slice pi. It must be noted that the matching
is established between regions, so the snake contour will be
pushed towards the region border. Depending on the side of
the region ®tted by the snake, the region will be inside or
outside the contour. To move the contour to the correct side
we introduce an orientation term in the region potential PR.
The matching of border points in slice i, pi, is found in the
minimum of the following cost function:
M�pi; pi21� � w1 £ �L�pi�2 L�pi21��1 w2 £ �u�pi�2 u�pi21��1 w3 £ d�pi; pi21�; �9�
where L and u are the region label and the orientation of a
boundary point, respectively, d is the distance between
border points in previous and actual slices, and w1, w2 and
w3 are the weights of each term and take values 0.5, 1.0 and
0.1, respectively. The ®rst term measures distances in label
values, which is equivalent to measuring distances between
densitometric features of regions. The second term
measures the deviation between border orientations; it
works to do the matching between the same part of the
two regions. It characterizes border points by their
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475 467

orientation, allows discriminating between border points of
the same region, and between border points of neighboring
regions of the same or different classes. Finally, the third
term measures distance in locations.
The matching point p̂i in the actual slice for the border
point pi21 in the previous slice will be:
p̂i � arg minpi
M�pi; pi21�: �10�
It is necessary to emphasize that the difference in orienta-
tion between corresponding border points must be less than
58 to avoid matching between very different orientations.
When processing a temporal or spatial sequence, it is
possible to reduce the computational cost of this matching
by working only in a small neighborhood of the contour
delineated in the previous slice.
From the matching between regions around the contour in
slice i 2 1 and regions in slice i, we obtain a signed offset in
x and y coordinates (Dx,Dy), from each point pi21 in slice
i 2 1 to the region matched point p̂i in slice i. To eliminate
erroneous matchings between regions of the two slices we
perform a median ®ltering of these offsets along the contour.
By adding the ®ltered offsets to each contour point pi21 in
slice i 2 1, we obtain the matching contour (MC) in slice i.
Finally, the region potential is obtained computing the
distance from each image point to the MC.
Sumarizing, for each point in the external contour of the
bone in slice i 2 1 we look for points in slice i with similar
region features. If vi is a snake vertex, we will express its
region potential as:
PR�vi� � kd�vi;MC�; �11�where k is a positive constant and d(vi,MC) represents the
distance from point vi to the nearest point in MC. In our
experiments d is the Euclidean distance. This potential
(linear function of distance) is not as steep as the edge
energy P 0E (negative exponential function of squared
distance, Eq. (8)) when the Euclidean distance approaches
zero, but it is steeper when the distance is large. In this way,
the region potential guides the snake evolution within the
homogeneous areas, and the edge potential takes the control
in the proximity of edge points because of its better accu-
racy in the location of border points. In this way we try to
avoid the accumulation of errors in the following way:
region information pushes the contour from homogeneous
areas (interior of regions) towards the border between
regions, then the edge information becomes more important
and looks for the external contour of the bone as demon-
strated in Ref. [25]. The region potential is adequate for
large displacements and the edge information is better for
local ®tting of the contour.
Synthetic images in Fig. 4 illustrate the effect of this region
energy. Fig. 4(a) and (b) represent two images in a temporal or
spatial sequence. Let us suppose that the biggest circle has
already been segmented in Fig. 4(a) and now, we are interested
in segmenting the same circle in Fig. 4(b). Fig. 4(c) shows the
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475468
Fig. 4. Example of the evolution of the curve guided by region energy: (a) and (b) adjacent slices in a sequence; (c) ®nal delineated contour in image (a) over
image (b); (d) ®nal contour for image (b).

®nal contour for the biggest circle in Fig. 4(a) (actual initial
contour) superposed on the image in Fig. 4(b). Thus, the initial
contour encloses part of the smallest circle. However, the
region potential is able to distinguish between the nearest
contour of the smallest circle and the true corresponding
contour of the biggest circle. Fig. 4(d) shows the ®nal contour
after deformation by only taking into account the region poten-
tial.
Fig. 5 illustrates all the processes in computing the region
potential and establishes some comparisons with edge infor-
mation. Fig. 5(a) shows the original image and Fig. 5(b)
contains the edge information after focusing edges. As can
be seen, edge information only permits a local adjustment
but contains some ambiguities because it does not permit to
distinguish between bone contour and leg contour.
However, it must be noted that the edge potential will be
able to distinguish between internal and external bone
contours, but not between external bone contour and exter-
nal edge contour. Later, in Fig. 8 we will illustrate this fact.
Fig. 5(c) and (d) contains the region segmentation obtained
for the previous slice and the actual slice, respectively. Each
region is identi®ed by its label that is ordered by tissue
density as aforementioned. Fig. 5(e) shows the matching
between the regions around the contour in the previous
slice with region borders in the actual slice and, ®nally,
Fig. 5(f) shows the region potential PR obtained after ®lter-
ing the matching contour and computing distances.
2.3. Energy minimization
After introducing the new methodology and potential
terms, the full expression for the external energy is:
Eext�vi� � PG 1 PI 1 P 0E 1 PR
� 2gu7�G�vi� p I�vi��u 2 dI�vi�
1 he2d�v�i��2 ´min 0;2
2~nI�vi�
� �1 kd�vi;MC�; �12�
where d(vi) denotes the distance between vertex vi and the
closest edge in the previously obtained edge map, as
described in Section 2.2.1, and g , d , h , k are positive
constants. The intensity and the gradient are useful for guid-
ing the snake in areas where edge information is lost. These
®rst three terms take values between 0 and 255. The region
potential takes values that depend on the accuracy of the
initial contour, but are much smaller than the other terms.
We determine heuristically the weights g � 1; d � 1; h �4; k < 50: These weights have been set to normalize all the
potential terms in order to obtain a similar contribution from
all of them. After processing several sequences of CT
images, we found that, on average, all the terms have the
same signi®cance.
The external energy is combined with the classical inter-
nal energy:
Eint�vi� � ai�vi 2 vi21�2 1 bi�vi21 2 2vi 1 vi11�2; �13�to obtain the total snake energy. a and b take small values
( < 0.01). In fact, they can have value zero if the contour is
represented by means of B-splines (smooth shapes).
The solution to the problem of detection of the outer
contour is given by the minimization of the sum of energy
functions in Eqs. (12) and (13) over all the snake vertices. In
our case, the initial external contour is the contour obtained
from the segmentation of the previous slice in the sequence.
This fact allows a constrained search of the energy mini-
mum along the direction normal to each contour vertex. We
have used a method based on dynamic programming [1]
where an oriented segment of the possible displacement is
de®ned for each vertex of the snake. Each segment is
oriented in the normal direction to the curve and centered
on a vertex. In this way computation is 10 times lower than
having to explore all the neighborhood, and the solution
does not get worse [25]. One of the main advantages of
dynamic programming is that it does not require the energy
functional to be differentiable, so it can be used to impose
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475 469
Fig. 5. (a) Original slice in a CT image sequence; (b) edge map after edge
focusing; (c) region segmentation of the previous slice in the sequence; (d)
region segmentation of the current slice (a); (e) matching contour; (f) region
potential.

hard constraints on the model and to employ energy terms
where a variational principle is dif®cult to derive.
Given three consecutive control points (vertices)
vk; vk11; vk12; the vertex vk11 can only be moved along a
segment centered on itself and normal to the straight line
connecting vk and vk12 (see Fig. 6). Then, starting from an
initially ®xed arbitrary vertex, dynamic programming was
used to determine the position of the remaining contour
control points for the energy minimum. The starting vertex
changes in each iteration of the algorithm, thus the
constraint of going through the ®xed initial and ®nal points
is eliminated. The process is repeated until a global mini-
mum of the snake energy is achieved. In each iteration the
segment of the control points' variation is recalculated to
make the shape of the snake ¯exible. This segment is deter-
mined from the normal to the curve for the external contour
of the cortical bone, and parallel to the horizontal axis for
the internal contour.
3. Results
When an initial approximated contour can be provided,
for example when segmenting sequences of CT slice
images, the object can be roughly determined. By means
of a deformable contour that integrates region and edge
information the spatial location of the object boundary can
be precisely de®ned.
Experiments were carried out with different sets of CT
knee images to verify the performance of the system. Fig. 7
corresponds to a case where an injury appears between the
tibia and the ®bula. These two bones are very close as can be
seen in Fig. 7(a), where the initial contour is superposed.
Fig. 7(b) shows the poor result obtained using the classical
energy terms, where PE was calculated from an edge map
obtained using a single scale edge detector. The classical
edge/gradient potentials are not able to distinguish between
external and internal contours of the cortical bone, or
between the tibia and the ®bula. It only looks for the nearest
raw local edges and the high gradient points. Fig. 7(c) shows
the ®nal ®tness reached using the combined action of clas-
sical terms with edge focusing and directional derivative
potential integrated in P 0E: The result improves, but tibia
edge points trap part of the external contour of the ®bula
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475470
Fig. 6. Searching area for the energy minimum. The solid curve represents
the initial contour and the dotted curves enclose the area where the mini-
mum is searched. Segments normal to the curve represent the permitted
displacement of each snake vertex.
Fig. 7. (a) Original image with an injury between the tibia and the ®bula with the initial contour superposed; (b) segmentation obtained using classical energy
terms; (c) delineation of external bone contours obtained by adding a directional derivative energy term; and (d) improved results after integrating region and
edge/gradient information.

due to the fact that the initial ®bula contour is inside the
tibia. In this case, a good delineation of the tibia and
the ®bula can not just rely on edge/gradient information.
The region information derived from a region-based
segmentation pushes the snakes out of the confusing area,
and the edge information ®ts the snakes to the external
contours of the tibia and the ®bula. Thus, the result improves
integrating region and edge/gradient features, as shown in
Fig. 7(d).
Fig. 8 shows an example that belongs to a different image
sequence, where problems arising from bone loss and
narrow cortical bone are present. Fig. 8(a) shows the loca-
tion of the initial contour (®nal contour of the previous
slice). It can be observed that the initial contour is partially
located inside the tibia and other part is located outside the
tibia between the tibia external contour and the knee
contour. Fig. 8(b) represents the ®nal delineation obtained
by classical gradient and edge potentials, where the contour
is pushed towards the nearest edges and local gradient
maxima. Exchanging the classical edge potential PE for
the new edge potential P 0E the result improves, as can be
seen in Fig. 8(c). At this moment, a lot of spurious edge
points are discarded, although several of them remain. Fig.
8(d) illustrates the global effect of the new edge and region
potentials, where it is possible to distinguish between the
tibia contour and the knee contour, and between trabecular
edges and external cortical bone. Region energy is not
enough because of the well known problem of non-optimal
contour location of region segmentation. Moreover, due to
the low contrast in this slice, some bone and muscle zones
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475 471
Fig. 8. (a) Original image with initial contour location; (b) segmentation
obtained using classical energy terms; (c) delineation of external bone
contours obtained with the new edge potential; and (d) improved results
after integrating the new region and edge information.
Fig. 9. (a) Original image with a high density injury; (b) edge map; (c) ®nal contour using only gradient and edge information; and (d) ®nal contour when
adding region information to (c).

appear merged in the aforementioned pre-segmentations
from which region potentials are computed.
Fig. 9 illustrates a case with very low contrast and signal
to noise ratio. After the edge focusing process (Fig. 9(b)),
edge information is not detected in the left, near the location
where the external contour was detected in the previous
slice. This is due to the low quality of the cortical bone in
this part. Actually, a strong contour is located around a high
density injury inside the bone. Although it is dif®cult to see,
the injury is inside the trabecular bone and the real external
contour of the bone is not around the brighter part (injury).
The edge focusing process does not extract edge points in
some parts of this area because the contour that supplies
location constraints (®nal contour in the previous slice) is
more on the right, real edge points in the current slice are
very weak (low gradient) and the injury contour is far from
the model contour used in edge focusing. Fig. 9(c) shows the
result (better than the result obtained with classical snake
implementations) only considering gradient and edge infor-
mation, as described in Ref. [25]. The gradient and direc-
tional derivative potentials push the snake towards the
injury edge points. Part of the contour is correctly ®tted
but, in the area indicated by the arrow, these energy terms
push the snake towards the injury and deviate it from the
external cortical bone. In that case the cortical bone has very
low density, which was the cause of the fracture that
provoked the lesion. The injury is brighter because part of
the bone of the tibia plateau embedded itself in the trabe-
cular bone. Fig. 9(d) shows the improved ®nal contour after
the integration of region and edge features. It can be seen
how region information allows the improvement of the
delineation of the tibia external contour.
Fig. 10 shows the surface reconstruction from the 2D
contours obtained after segmenting a CT image sequence.
This ®gure corresponds to the proximal end of the tibia and
the ®bula of a patient. We use the free software packages
Nuages and Geomview for the triangulation of contours and
visualization of the surface, respectively.
To evaluate objectively the importance of including edge
focusing, directional derivatives and region information, we
considered two real images where a correct segmentation is
provided by our approach. Then Gaussian noise was added
and contrast reduced. To characterize the segmentation
quality we applied the judging criteria used in Ref. [36].
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475472
Fig. 10. Example of a 3D reconstruction after segmenting a CT image
sequence.
Fig. 11. (a) Original image; (b) two intermediate images with decreasing contrasts; and (c) same original image with two increasing levels of added Gaussian
noise.

Let Rf denote the feature value obtained from a reference
image and Sf denote the feature value measured from the
segmented image. The performance criterion, which is
called Relative Ultimate Measurement Accuracy of an
object feature (RUMAf), is computed by:
RUMAf � 100uRf 2 Sf u
Rf
: �14�
The smaller the value of RUMAf, the better the quality of
the segmentation. In our case, features Rf and Sf are the set of
pixels belonging to the objects of interest, computed from
the binary segmentations. Rf will be the set provided by
manual segmentation on the original image (ground truth
segmentation), and Sf will be the set provided by our
approach in images with an added noise or reduced contrast.
uRf 2 Rsu counts the number of pixels that differ between the
two segmentations. So RUMAf measures the percentage of
overlapping between the two segmentations.
To carry out the experiment we considered an original
image with a well de®ned cortical bone, and then we gener-
ated two sequences of six images: one sequence with a
decreasing contrast, and the other with an increasing Gaus-
sian noise. We obtained the segmentations with and without
region information and compared them with the correct
segmentation obtained for the original image (ground
truth). Fig. 11(a) shows the original image, Fig. 11(b) illus-
trates two intermediate images with decreasing contrast, and
Fig. 11(c) shows the original image with two increasing
levels of added Gaussian noise. The segmentations of
these images were obtained when using only edge/gradient
information and when region information was also consid-
ered. As we expected, the performance of both methods is
worst when noise is increased and contrast is decreased. But
the integrated method performed better than the method
without region information.
We then took the manual segmentation of the original
image as the real segmentation and computed the value of
RUMA in three cases: using only classical terms, including
edge focusing and directional derivative potential, and
adding region potential. Fig. 12 shows the graphical repre-
sentation of this error measure. In this way an objective
comparison of quality is presented that con®rms the visual
subjective valuation. The new approach clearly improves
the classical implementation performance. When the
image degradation increases, the region information
becomes more valuable. Initially, region information does
not improve segmentation because the cortical bone is
perfectly de®ned and the edge/gradient information
achieves good results. When the cortical bone quality get
worst, edge/gradient information becomes imprecise and
region information begins to be important.
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475 473
Fig. 12. Comparison between segmentations obtained using classical terms, adding edge focusing and directional derivative potential, and adding region
potential. Original images correspond to the sequences in Fig. 11. The comparison is established in terms of the RUMA between real segmentation and the
segmentations obtained in two cases: when contrast decreases and when noise increases.
Table 1
Comparison with manual segmentations: the ®rst column identi®es the
image, the second one contains the minimal error between the segmentation
provided by the system and the manual segmentations, the third column
shows the error between the automatic segmentation and the average
manual segmentation, and the last column contains the error between the
two manual segmentations
Image
sequence-
number
Minimal
error
(RUMA)
Average
error
(RUMA)
Mutual error
(RUMA)
Seq1-1 1.43 1.53 1.30
Seq1-2 1.54 2.01 2.33
Seq1-3 1.98 2.10 2.87
Seq2-1 3.51 3.52 3.67
Seq2-2 2.13 2.09 2.28
Seq2-3 3.87 3.52 3.04
Seq3-1 3.22 2.99 2.42
Seq3-2 2.37 2.68 2.98
Seq3-3 2.92 2.83 3.42
Seq3-4 2.52 2.97 3.87

We have also compared the results obtained by expert
manual tracing of the contours with the ones achieved by
our method. We have chosen 10 images from three CT
image sequences with different levels of noise and contrast.
For each CT sequence we took images in the proximal,
distal and intermediate part of the tibia and the ®bula.
These images were manually segmented by two experts,
and then using our method. After obtaining the segmenta-
tions the error measure (RUMA) was calculated between:
(1) each one of the hand-traced segmentations and the auto-
mated one, (2) hand-traced segmentations, and (3) average
hand-traced segmentation and the automated one. In Table 1,
the error measures are shown for the minimal error between
manual and automated segmentation (Minimal Error),
between average and automated segmentations (Average
Error), and between the two manual segmentations (Mutual
Error). In all cases the Minimal Error or the Average Error
are lower than or close to the Mutual Error (between the two
manual segmentations), and the segmentations provided by
our method visually appear more precise.
4. Discussion and conclusions
Segmenting structures from medical images is dif®cult due
to well known reasons. Deformable models seem to be very
accurate for medical images because of their ability to manage
image data and a priori knowledge. In this paper we have
proposed a deformable contour that combines region and
edge/gradient information in order to solve problems in the
classical formulation that affect the segmentation of images
obtained from CT bone scans. Moreover, edge information
was re®ned by means of an edge focusing process that was
aimed to retain only salient edges in the image.
Results obtained from the application of our approach to a
number of images were visually validated by two experts.
Our approach offers several advantages over the manual
tracing methods commonly used in dif®cult segmentation
tasks. It generally permits a more precise segmentation of
bones, it is repeatable and saves a signi®cant amount of
user's time. In the aforementioned experiments one expert
took, on average, 4 min and 45 s per slice to make the
segmentations, and the other expert took 4 min and 48 s.
On average, our algorithm takes about 1.5 min for the
segmentation of each slice on a Sun Sparc 10 workstation,
including edge focusing, region-based segmentation and
boundary optimization.
As the examples show, the integration of edge/gradient
and region information is more robust than a conventional
method that uses only edge/gradient information. We re®ne
edge information by selecting edges of interest, and intro-
duce a new region potential that looks for similar contour
con®gurations in adjacent slices. We introduce knowledge
about the location of the object of interest and knowledge
about the behavior of edges in scale space, in order to
enhance edge information. We also introduce a region infor-
mation aimed at complementing edge information. The
novelty in that is that the new region potential does not
rely on prior knowledge about image statistics; the desired
features are derived from segmentation of the previous slice
in the 3D sequence. This makes the method less sensitive to
initial conditions.
In the application of our algorithm there are two aspects
that need to be improved: ®rstly, the cost function for the
region matching could include other new features and,
secondly, the relative weighting between gradient/edge
and region terms have been experimentally obtained. We
found that region information becomes more important
when the contrast decreases and the noise increases, but
we still have to obtain the mathematical relation. Anyway,
as automatic selection of the weights is highly desirable in
deformable models, we are working on it and our ®rst
results can be found in Ref. [27]. The idea is to measure
the relevance of each feature (potential term) in de®ning the
contour of the object of interest after snake ®tting in each
slice and from these relevance values, obtaining the weights
for the next slice.
Acknowledgement
This work was supported by Xunta de Galicia through
Grants XUGA20603B96 and PGIDT99PXI20606B.
References
[1] A.A. Amini, T.E. Weymouth, R.C. Jain, Using dynamic programming
for solving variational problems in vision, IEEE Trans. Pattern Anal.
Mach. Intell. 12 (9) (1990) 855±867.
[2] N. Ayache, J.D. Boissonnant, L. Cohen, B. Geiger, J. Levy-Vehel, O.
Monga, P. Sander, Steps toward the automatic interpretation of 3D
images, in: K.H. HoÈhne (Ed.), 3D Imaging in Medicine, NATO ASI
Series, vol. F60, Springer, Berlin, 1990.
[3] K.T. Bae, M.L. Giger, C.T. Chen, C.E. Kahn Jr, Automatic segmenta-
tion of liver structures in CT images, Med. Phys. 20 (1) (1993) 71±78.
[4] F. Bergholm, Edge focusing, IEEE Trans. Pattern Anal. Mach. Intell.
9 (1987) 726±741.
[5] M. Bro-Nielsen, Finite element modeling in surgery simulation, Proc.
IEEE 86 (3) (1998) 490±503.
[6] D. Cabello, M.G. Penedo, S. Barro, J.M. Pardo, J. Heras, CT image
segmentation by self-organizing learning, in: J. Mira, J. Cabestany, A.
Prieto (Eds.), New Trends in Neural Computation, Lecture Notes in
Computer Science, vol. 686, 1993, pp. 651±656.
[7] J. Canny, A computational approach to edge detection, IEEE Trans.
Pattern Anal. Mach. Intell. 8 (6) (1986) 679±698.
[8] A. Chakraborty, L.H. Staib, J.S. Duncan, Deformable boundary ®nd-
ing in medical images by integrating gradient and region information,
IEEE Trans. Med. Imaging 15 (6) (1996) 859±870.
[9] K. Cho, P. Meer, Image segmentation from consensus information,
Comput. Vision Image Understanding 68 (1) (1997) 72±89.
[10] C.-C. Chu, J.K. Aggarwal, The integration of image segmentation
maps using region and edge information, IEEE Trans. Pattern Anal.
Mach. Intell. 15 (12) (1993) 1241±1252.
[11] L.D. Cohen, I. Cohen, Finite-element methods for active contour
models and balloons for 2-D and 3-D images, IEEE Trans. Pattern
Anal. Mach. Intell. 15 (11) (1993) 1131±1147.
[12] P. Dario, C. Paggetti, T. Ciucci, D. Bertelli, B. Allota, M. Marcacci,
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475474

M. Fadda, S. Martelli, D. Caramella, A system for computer-assisted
articular surgery, J. Comput. Aided Surgery 1 (1996) 48±49.
[13] A.P. Dhawan, L. Arata, Knowledge-based 3D analysis from 2D medi-
cal images, IEEE Engng Med. Biol. 10 (4) (1991) 30±37.
[14] J. Ivins, J. Porrill, Active region models for segmenting textures and
colours, Image Vision Comput. 13 (5) (1995) 431±438.
[15] M.S. Kankanhalli, C.P. Yu, R.C. Krueger, Volume modelling for
orthopedic surgery, IFIP Trans. B (Applic. Technol.) B-9 (1993)
303±315.
[16] M. Kass, A. Witkin, D. Terzopoulos, Snakes: active contour models,
Int. J. Comput. Vision 1 (1988) 321±331.
[17] J.H. Keyak, M.G. Fourkas, J.M. Meagher, H.B. Skinner, Validation of
an automated method of three-dimensional ®nite element modelling
of bone, J. Biomed. Engng 15 (1993) 505±509.
[18] Y. Lu, R.C. Jain, Reasoning about edges in scale space, IEEE Trans.
Pattern Anal. Mach. Intell. 14 (4) (1992) 450±468.
[19] D. Marr, E. Hildreth, Theory of edge detection, Proc. R. Soc. London,
Ser. B 207 (1980) 187±217.
[20] T. McInerney, D. Terzopoulos, 1995. Topologically adaptable snakes,
in: Proceedings ICCV'95, Berlin, Germany, pp. 840±845.
[21] T. McInerney, D. Terzopoulos, Deformable models in medical image
analysis: a survey, Med. Image Anal. 1 (2) (1996) 91±108.
[22] B.P. McNamara, D. Taylor, P.J. Prendergast, Computer prediction of
adaptive bone remodeling around noncemented femoral prostheses:
the relationship between damage-based and strain-based algorithms,
Med. Engng Phys. 19 (5) (1997) 454±463.
[23] R. MuÈller, P. RuÈegsegger, Three-dimensional ®nite element model-
ling of non-invasively assesses trabecular bone structures, Med.
Engng Phys. 17 (2) (1995) 126±133.
[24] S. Pankanti, A.K. Jain, Integrating vision modules: stereo, shading,
grouping, and line labeling, IEEE Trans. Pattern Anal. Mach. Intell.
17 (8) (1995) 831±842.
[25] J.M. Pardo, D. Cabello, J. Heras, A snake for model-based segmenta-
tion of biomedical images, Pattern Recogn. Lett. 18 (14) (1997)
1529±1538.
[26] J.M. Pardo, 1998. Solid modelling of bone structures from tomo-
graphic images, (in Spanish), PhD (Available in CD-ROM from
Univ. Santiago de Compostela, Spain, ISBN: 84-8121-680-1).
[27] X.M. Pardo, P. Radeva, 2000. Discriminant snakes for 3D reconstruction
in medical images, in: Proceedings of the 15th International Conference
on Pattern Recognition, Barcelona, Spain, vol. 4, pp. 336±339.
[28] T. Pavlidis, Y.-T. Liow, Integration region growing and edge detec-
tion, IEEE Trans. Pattern Anal. Mach. Intell. 12 (3) (1990) 225±233.
[29] E. Pepino, M. Cesarelli, F. Di Salle, A. Mosca, M. Bracale, Prelimin-
ary notes on the conversion of three-dimensional images of bones into
CAD structures for the pre-operative planning of intertrochantheric
osteotomies, Med. Biol. Engng Comput. 31 (1993) 529±534.
[30] T. Pun, G. Gerig, O. Ratib, Image analysis and computer vision in
medicine, Comput. Med. Imaging Graphics 18 (2) (1994) 85±96.
[31] P. Radeva, J. Serrat, E. Marti, 1995. A snake for model-based
segmentation, in: Proceedings of International Conference on
Computer Vision.
[32] R. Ronfard, Region-based strategies for active contour models, Int. J.
Comput. Vision 13 (2) (1994) 229±251.
[33] M. Sonka, W. Park, E.A. Hoffman, Rule-based detection of
intrathoracic airway trees, IEEE Trans. Med. Imaging 15 (3)
(1996) 314±326.
[34] L.H. Staib, A. Chakraborty, J.S. Duncan, An integrated approach for
locating neuroanatomical structure from MRI, Int. J. Pattern Recogn.
Arti®cial Intell. 11 (8) (1997) 1247±1269.
[35] M. Worring, A.W.H. Smeulders, L.H. Staib, J.S. Duncan, Parameter-
ized feasible boundaries in gradient vector ®elds, Comput. Vision
Image Understanding 63 (3) (1996) 135±144.
[36] Y.J. Zhang, Evaluation and comparison of different segmentation
algorithms, Pattern Recogn. Lett. 18 (1997) 963±974.
[37] D. Zhu, R. Conners, P. Araman, 3-D CT image segmentation by
volume growing, SPIE 1606 (1) (1991) 685±692 Visual Communica-
tions and Image Processing'91: Image Processing.
[38] T.S. Zhu, S.Ch. Lee, A.L. Yuille, 1995. Region competition: unifying
snakes,region growing and Bayes/MDL multi-band image segmenta-
tion, in: Proceedings of the International Conference on Computer
Vision, pp. 416±423.
X.M. Pardo et al. / Image and Vision Computing 19 (2001) 461±475 475