distributed prognostic health management with …€¦ · · 2013-04-10that have the ability to...
TRANSCRIPT

Distributed
Sankalita SahaMCT/NASA ARC
Moffett Field, CA 94035Sankalita. Saha&nasa. gov
Prognostic Health ManagemenProcess Regression
Bhaskar Saha Abhinav Saxena
MCT/NASA ARC SGT/NASA ARCMoffett Field, CA 94035 Moffett Field, CA 94035
bhaskar.saha&nasa.gov abhinay.saxenaL&nasa.gov
t with Gaussian
Kai GoebelNASA ARC
Moffett Field, CA 94035kai. RoebelCt^nasa. gov
Abstract—Distributed prognostics architecture design is anenabling step for efficient implementation of healthmanagement systems. A major challenge encountered insuch design is formulation of optimal distributed prognosticsalgorithms. In this paper. we present a distributed GPRbased prognostics algorithun whose target platform is awireless sensor network. In addition to challengesencountered in a distributed implementation, a wirelessnetwork poses constraints on connnunication patterns,thereby making the problem more challenging. Theprognostics application that was used to demonstrate ournew algorithms is battery prognostics. In order to presenttrade-offs within different prognostic approaches, we presentcomparison with the distributed implementation of a particlefilter based prognostics for the same battery data.
TABLE OF CONTENTS
1. INTRODUCTION ................................................................. 12. RELATED WORK ..............................................................13. DISTRIBUTED PROGNOSTICS ARCHITECTURE ................ 24. GPR BASED PROGNOSTICS .............................................. 25. DISTRIBUTED GPR ...........................................................46. EXPERIMENTS AND RESULTS .......................................... 47. CONCLUSIONS .................................................................. 6REFERENCES ........................................................................7BIOGRAPHY ..........................................................................7
1. INTRODUCTION
Computational complexity has always been one of thestumbling blocks for sophisticated prognostic algorithmsthat have the ability to manage the uncertainties in systemhealth management. Distributed prognostics running on anetwork of inexpensive embedded devices can serve as anenabling technology for implementing efficient and viablehealth management systems that involve complex interactionof hybrid elements and subsystems. In such a scenario,multiple sensors monitor various components, subsystemsand hierarchically the entire system. The measurementstaken from these sensors are then processed by suitablediagnostic algorithms to determine the current health of thesystem, while the prognostic algorithms determine the futurehealth conditions. A centralized architecture for such ahealth management system has several disadvantages suchas: (a) increased amounts of sensor data collected for morerefined analysis (e.g., high frequency vibration data fromrotating machinery) that overwhelms the computing powerof a single processing unit (b) increasingly more complex
algorithms – intensive in terms of memory as well ascomputation speed – which hamper performance and (c)vulnerability to loss of complete functionality in case of acrash of the central processor, ,'monitor. Clearly, for suchincreasingly multi-tasking and complex health managementsystems, efficient distributed architectures need to bedesigned where multiple smart sensor devices monitordifferent parts of a system and collaborate whencomputation intensive algorithms or large amounts of dataare involved that cannot be handled efficiently by a singleprocessor/node. The advances in smart sensor technologythat combine the power of embedded computing deviceswith sensors and wireless transmission technology havemade the design and implementation of such systemsfeasible and cost-efficient-
An important design problem of such systems is formmulationof efficient and robust distributed health managementalgoritlnns that can take advantage of the distributedarchitecture. Gaussian process regression (GPR) basedprognostics algorithms form an important class of healthmanagement solutions, since it is possible to model any kindof system behavior using a suitable mixture of Gaussianprocesses in a Bayesian inference framework. They offer theflexibility to incorporate prior knowledge about theunderlying processes in a convenient and intuitive manner.However, they are computation and memory intensivealgorithms and hence may benefit by distributedimplementations in order to meet resource constraints foronboard deployment on aerospace systems with largeamounts of sensor data.
In this paper, we present a distributed prognostics algorithmbased on GPR. The target platform in our design is awireless smart sensor network that has, of late, gainedimmense importance for deployment in various fields. Theresults are evaluated on a battery prognostics application.Besides presenting details of the distributed GPR basedprognostics system; we present a comparison of thecomputation performance and robustness results with aparticle filter based implementation of the prognosticssystem and analyze the trade-offs involved in theirdistributed implementations.
2. RELATED WORK
A significant body of work dealing with distributedimplementation of prognostic algorithms does not exist. Thisis because the field of prognostics is still maturing.
https://ntrs.nasa.gov/search.jsp?R=20100026471 2018-06-18T16:16:53+00:00Z
However ; a few efforts have been made recently. Forexample, in [1] the authors briefly outline a distributedprognostics system architecture where tasks are distributedat a very high level, such as identifying the different systemmodules and where they fit into a given system usingprognostics. In [2] a distributed network of smart sensorelements integrated using a knowledge-driven environmentis presented which will perform health management atvarious levels of hierarchy including sensor, process, andsystem levels. This network will be used as an element ofthe prototype intelligent rocket test facility beingimplemented at NASA Stennis Space Center. In [3] ahardware multi-cellular sensing and conununication network(a smart "skin") is presented where the external structurewith embedded sensors would detect and react to impactscaused by projectiles.
Distributed prognostics architecture have been exploredearlier as shown in ([5], [6]), where the prognosticsalgorithms were based on particle filters. GPR basedprognostics algorithms form an important class of regressiontechniques that are used in many applications and has beenapplied to the prognostics problem as well [4]. Efficientimplementations of GPR have been explored for otherapplications but have not been investigated in the context ofprognostics and health management ([7], [8]). Most of thesemethods suggest clustering ofdatasets into independentgroups and applying GPR on them individually whileaveraging the results from the separate clusters to obtain thefinal result. However, these methods are not very suitablefor applications where the datasets involve time seriesconnmonly encountered in prognostics applications. In thispaper, we propose a new efficient distributed GPR algorithmwithout compromising on performance.
3. DISTRIBUTED PROGNOSTICS ARCHITECTURE
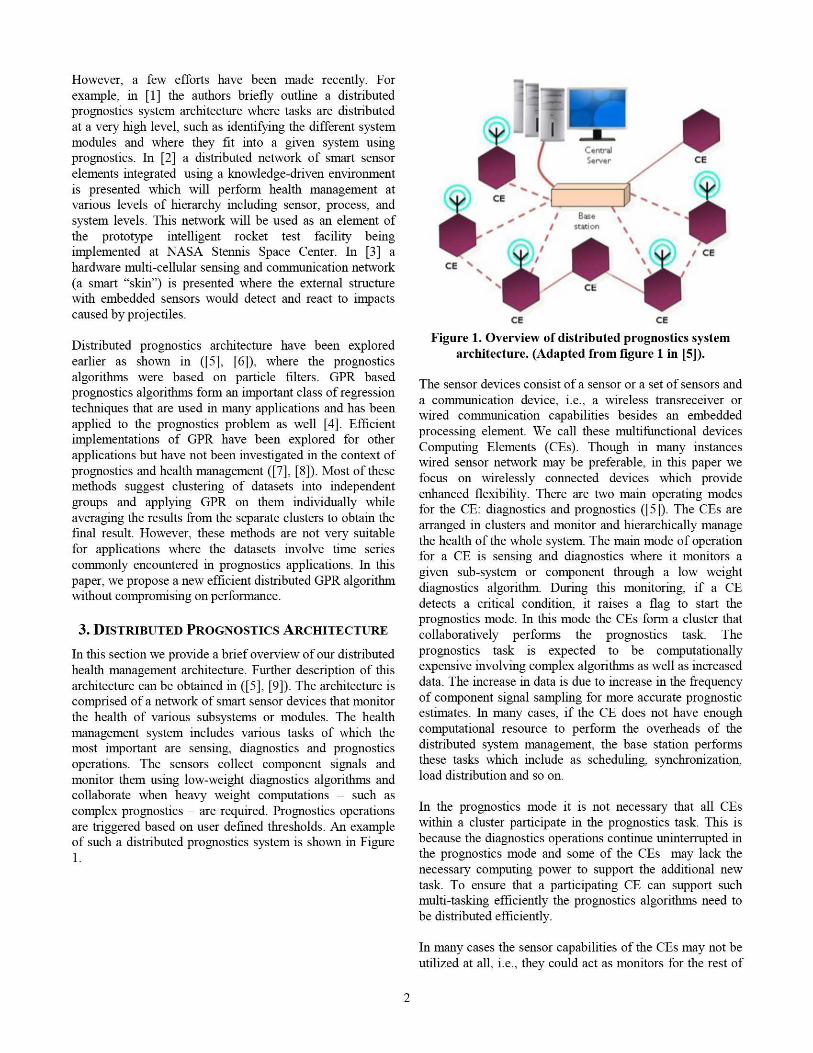
In this section we provide a brief overview of our distributedhealth management architecture. Further description of thisarchitecture can be obtained in ([5], [9]). The architecture iscomprised of a network of smart sensor devices that monitorthe health of various subsystems or modules. The healthmanagement system includes various tasks of which themost important are sensing, diagnostics and prognosticsoperations. The sensors collect component signals andmonitor them using low-weight dia gnostics algorithms andcollaborate when heavy weight computations — such ascomplex prognostics — are required. Prognostics operationsare triggered based on user defined thresholds. An exampleof such a distributed pro gnostics system is shown in Figure
1 ^
CentralServer CE
C 1 CE
/ Base
/ station
/ CE
CE
\ CE
CE CE
Figure 1. Overview of distributed prognostics systemarchitecture. (_adapted from figure 1 in [51).
The sensor devices consist of a sensor or a set of sensors anda communication device, i.e., a wireless transreceiver orwired communication capabilities besides an embeddedprocessing element. We call these multifunctional devicesComputing Elements (CEs). Though in many instanceswired sensor network may be preferable, in this paper wefocus on wirelessly connected devices which provide
enhanced flexibility. There are two main operating modesfor the CE: diagnostics and prognostics ([5]). The CEs arearranged in clusters and monitor and hierarchically managethe health of the whole system. The main mode of operationfor a CE is sensing and diagnostics where it monitors agiven sub-system or component through a low weightdiagnostics algorithn. During this monitoring, if a CEdetects a critical condition, it raises a flag to start theprognostics mode. In this mode the CEs form a cluster thatcollaboratively performs the prognostics task. Theprognostics task is expected to be computationallyexpensive involving complex algorithms as well as increaseddata. The increase in data is due to increase in the frequencyof component signal sampling for more accurate prognosticestimates. In many cases, if the CE does not have enoughcomputational resource to perforni the overheads of thedistributed system management, the base station performsthese tasks which include as scheduling, synchronization,load distribution and so on.
In the prognostics mode it is not necessary that all CEswithin a cluster participate in the prognostics task. This isbecause the diagnostics operations continue uninterrupted inthe prognostics mode and some of the CEs may lack thenecessary computing power to support the additional newtask. To ensure that a participating CE can support suchmulti-tasking efficiently the prognostics algorithms need tobe distributed efficiently.
In many cases the sensor capabilities of the CEs may not beutilized at all, i.e., they could act as monitors for the rest of
the system - schedule tasks, detect failures and initiaterecovery, provide access to resources such as an externaldatabase and so on. These CEs are specially designated asbase stations. The base station is also, typically, connectedto a more power computing resource (to aid in collectionand storage of system data) which in our case was a PC.
Figure 2 shoves, in detail, the typical execution flow in ourhealth management architecture. As mentioned earlier, eachCE monitors different components or subsystems such asbattery health, actuator faults, health of electroniccomponents and so on. It can also be responsible fordiagnostic monitoring of a sub-system comprising multiplecomponents. For further details on the architecture, thereader is referred to [9].
0 w^0
• All CEs running ./Diagnostic routines - f l
yy77a1
C=reporr<; fault - l• Prognostics mode triggered !„
O • BaseStationsets upPrognostics network
o • Participating continue to runn ^Diagnostics
-- - - - - - - - -- ---:;^^ o
• Fault reporting CEwrs Prognostics• Participating CEs run Diagnostics & Prognostics• Remaining CEs conti nue to run Diagnostics
Figure 2. Flow diagram for diagnostics and prognosticsoperations in the distributed architecture. (Adapted
from figure 2 in 19]).
4. GPR BASED BATTERY PROGNOSTICS
In this section, we first provide an overview of theprognostics application which in our case is a batteryprognostics application. Following that, details of the GPRbased regression and prediction technique is presented.
Overview of Battery Prognostics Application
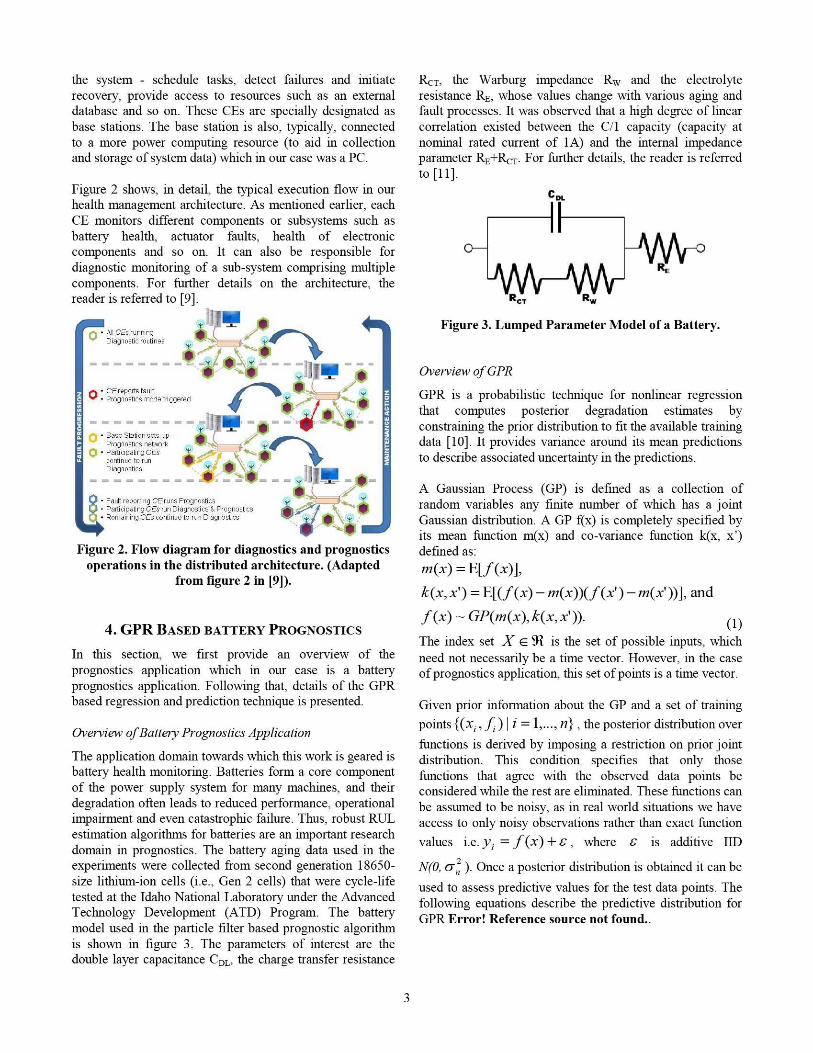
The application domain towards which this work is geared isbattery health monitoring. Batteries form a core componentof the power supply system for many machines, and theirdegradation often leads to reduced performance, operationalimpairment and even catastrophic failure. Thus. robust RULestimation algorithms for batteries are an important researchdomain in prognostics. The battery aging data used in theexperiments were collected from second generation 186>0-size lithium-ion cells (i.e., Gen 2 cells) that were cycle-lifetested at the Idaho National Laboratory under the AdvancedTechnology Development (ATD) Program. The batterymodel used in the particle filter based prognostic algoritmzis shown in figure 3. The parameters of interest are thedouble layer capacitance C DL , the charge transfer resistance
RCT , the Warburg impedance R,,w and the electrolyteresistance RE, whose values change with various aging andfault processes. It was observed that a high degree of linearcorrelation existed between the C/1 capacity (capacity atnominal rated current of IA) and the internal impedanceparameter RE+RCT . For further details, the reader is referredto [11].
Figure 3. Lumped Parameter Model of a Battery.
Overview of GPR
GPR is a probabilistic technique for nonlinear regressionthat computes posterior degradation estimates byconstraining the prior distribution to fit the available trainingdata [10]. It provides variance around its mean predictionsto describe associated uncertainty in the predictions.
A Gaussian Process (GP) is defined as a collection ofrandom variables any finite number of which has a jointGaussian distribution. A GP f(x) is completely specified byits mean filnction m(x) and co-variance function k(x, x')defined as:m(x) = E[f (x)],
k (x, x' ) = E[(.f (x) — m (x))(f (xr) — m(x•' ))], and
f (x) - GP(m (x), k(x, x')). (1)The index set X E T is the set of possible inputs, whichneed not necessarily be a time vector. However, in the caseof prognostics application, this set of points is a time vector.
Given prior information about the GP and a set of training
points 4X,, f ) I i = 1,... n} , the posterior distribution over
functions is derived by imposing a restriction on prior jointdistribution. This condition specifies that only thosefunctions that agree with the observed data points beconsidered while the rest are eliminated. These functions canbe assumed to be noisy, as in real world situations we haveaccess to only noisy observations rather than exact function
values i.e. y7 = f (x) + 6 , where 6 is additive IID
N(0, 671 ). Once a posterior distribution is obtained it can be
used to assess predictive values for the test data points. Thefollowing equations describe the predictive distribution forGPR Error! Reference source not found..

Prior
important to have optimized communication load.
C
y o K(x, x) + 6n K(X, X,,,,) (2)fr. ~ K(X,,,,,X) K(X,,,X,,,)
Posterior
fes, I X, y, X., —N(.f. ,cov(f,,t)),where
Jfast = E[.f,, I X,y,X,.,,]=K(X,X,,,,)[K(X,X)+6n I]-'y, (3)
cov(f.sr) =K(X,esr>X.s,)— K(X,,s, >X) +o-nl]-'K(X,Xres )
A crucial ingredient in a Gaussian process predictor is thecovariance function that encodes the assumptions about thefunctions to be learnt by defining the relationship betweendata points. The covariance stricture also incorporates priorbeliefs of the underlying system noise. GPR requires a priorknowledge about the form of covariance function, whichmust be derived from the context if possible. Furthermore,covariance functions consist of various hyper-parametersthat define their properties. Setting right values of suchhyper-parameters is yet another challenge in learning thedesired functions. Although the choice of covariancefunction must be specified by the user, corresponding hyper-parameters can be learned from the training data using agradient based optimizer such as maximizing the marginallikelihood of the observed data with respect to hyper-parameters [10].
GPR was used to regress the evolution of internalparameters of the battery with time. The relationshipbetween these parameters and the battery capacity was againlearned from experimental data. As stated earlier, batterycapacity was linearly related to the internal parametervalues, and when regressed through GPR, almost constantconfidence bounds were obtained for this relationship. Weregressed the internal parameters with time and transferredthe predicted values to the capacity domain to expresscapacity decay with time.
5. DISTRIBUTED GPR
One of the most computationally expensive steps in a GPRalgorithm is the Cholesky decomposition. Since Choleskydecomposition is a very popular matrix factorizationmethod, various efficient distributed methods have beendeveloped. However, a major drawback of most of thesedistributed methods is the use of extensive inter-processorcommunication. As shown in details in [12], cormrnrnicationoverhead can increase very quickly for most distributedCholesky decomposition schemes. Though a few newschemes for more efficient communication patterns havebeen explored, they are not suitable for wireless sensornetwork. In our case, since the target platform is a wirelessnetwork, use of such distributed schemes is not possible andhence other forms of distributed GPR have to beinvestigated. Note that, in a wireless sensor networkcommunication overhead contributes to overall increase inpower consumption as well and hence it is even more
An interesting approach to distributed GPR implementationis the clustering of the dataset into multiple group andapplication of GPR to each of them individually [7]. Thus,once this clustering is performed, the data is sent to thedifferent CEs which then apply GPR locally. The mostcommon approach of clustering in such cases is spatialclustering [8]. However, such an approach would not workfor prognostics application. In prognostics, prediction ofremaining useful life will have to be made from regressionof training data, and hence spatial clustering would not beable to encompass the temporal behavior of the data andcrucial information may be lost. Such loss of informationwould lead to increase in uncertainty bounds of theprediction and in general degradation in performance.
Thus, in our new proposed method; we present a differentclustering method. Instead of clustering the data usingspatial proxinuty, we sample the dataset uniformly togenerate multiple clusters containing equal data points. GPRwould then be applied to these clusters individually. At theend of the individual GPR routines, instead of weightedaveraging as proposed in [7], we perforni a simpleaveraging. Since the different clusters were generated usinguniform sampling, all of the clusters would statistically haveequal weights and hence all the prediction results have equalimportance. However, an important consideration in such aclustering scheme to work is assuring that no information islost while splitting up the dataset. This can be achieved byensuring the Nyquist sampling rate is applied. Thus, if thehighest frequency of the target application is fH and thedataset is clustered into in groups, the dataset on which GPRis being applied should have been sampled at a rate of fs,where fs is as follows
fs>2 *m*fH(2)
Once, the clustering is complete, the relevant sensor data istransmitted to the CEs. Each CE then applies GPR to thedata individually. Thus each CE may have its owncovariance matrix and set of hyper-parameters distinct fromthe rest.
6. EXPERIMENTS AND RESULTS
The distributed GPR based algorithm was evaluated usingMATLAB based simulation. In addition, distributedimplementation of particle filter based battery prognostics isalso presented in order to compare the two approaches. Anoverview of the particle filter based implementation is givenbelow.
Overview of Distributed Particle Filter based Prognostics
Particle filters (PFs) are based on Bayesian learningnetworks and essentially implement a recursive Bayesianfilter using Monte Carlo (MC) simulations. The system is

represented as a state which at any given instant is estimatedin terms of a finite number of particles (points) representingsampled values from the unknown state space, and a set ofassociated weights denoting discrete probability masses. Theevolution of the state over time is expressed by generationand recursive update of the particles from a nonlinearprocess model that describes the progression in time of thesystem under analysis, a measurement model, a set ofavailable measurements and an a priori estimate of the stateprobability distributed function (pdf). Figure 4 shows thealgoritlmuc flow of a PF system.
No
yes
Figure 4. The flow of a particle filter system.
As shown in figure 4 ; an important step in a particle filterstep is resampling. Without it the variance of the particleweights quickly increases, thereby causing degradation ininference because the effective number of particles used forthe state representation decreases. Unfortunately, all thesteps in a PF except resampling can be easily distributedover independently executing CEs. The resampling stepessentially consists of combining all the particles after astate update and redrawing particles from the sameprobability density based on some function of the particleweights such that the weights of the new particles areapproximately equal. This could lead to overheads incommunication when implemented serially, since all theparticle values — which are typically large (minimum of 100for most applications) — from different CEs performing theother steps concurrently have to be collected y andredistributed again.
In [6], a distributed implementation of the resamplingscheme — called parameterized resampling — was proposedWhich lead to an efficient distributed PF based prognosticsalgoritlmi. In this approach, the cominunication load wasreduced by performing resampling locally at each CE formost iterations and resampling globally (across all CEs)after every few iterations. In order to ensure the statisticalinvariance of the particle population after resampling, thefollowing conditions were imposed:(1) Each CE operates on a statistically significant number
of particles, i.e. No >> 1, where N„ denotes the numberof particles for CE,,, (EN„ = N). Without loss of
generality for all CEs Nn = N/M, where M is thenumber of CEs.
(2) Any given CE„ has a particle population representingthe full state pdf To ensure this, we perform aparametric approximation of the state pdf at the globalresampling step. A mixture of Gaussians is fitted to theparticle population of each CE using a least squaresmethod.
For further details please refer to [6].
Results
As mentioned in section 4, the application data was a batteryaging data collected from INL. The INL battery datacontained aging information — battery capacity values — fromweek 0 till week 68. The initial few points of the datasetwere used for learning purposes after which battery capacityprediction was performed. Figure 5, shows the prediction forRE+RCT with time at three different prediction points (32, 48and 52 weeks) using the distributed implementation of GPRbased prognostics on 2 CEs. The plot also includes a 9.5%confidence bound. The mean values from this RE+RcTevolution curve was used to predict the battery capacity.From figure 5 it may be observed that the predictions atweek 32 failed to follow the actual trend. Thus, when thistrend was used for the capacity prediction, it led to incorrectEOL predictions i.e.. the EOL was predicted to be far laterthan the actual value. As more data was used for learning,the predictions became better as can be seen with thepredictions at weeks 48 and 52. The corresponding EOL pdfis shown in figure 6. The actual failure as shown by the datawas at week 64.4563 while the mean value of the predictedEOL using GPR was at week 66.5.
PE + RCT trending0.045 ............. ............ .............. . ........................... . ............................ .......... .
Prediction @ 32 Weeks
0.04 Prediction @ 48 Weeks .......... ...... ............. ... .......... '...... ...
^—, Prediction @ 52 Weeks0.035 .............................
RE + RCT Groundtruth ;l
oos ............._................._............................ /....._.... _ _..C^u0 .025 ........................ <.............s.... .....f...:... ...........................
.......0.02 ............? ........................>..^ ..... .........4..............
0015 ,'0 10 20 30 40 50 60 70 80
weeks
Figure 5. Distributed GPR based RE+ RCT predictionwith 95% confidence bounds at weeks 32, 48 and 52.

X...........
X^
RUL pdfs X!............
I
ti0
0 9Ea
n 0.^m
i-3 0 BECLJry O.f
0.7E
L5 0.i
nmU
0.6E
U0
7. CONCLUSIONS
In this paper, a new distributed GPR based prognosticsalgorithm targeted towards wireless sensor networks hasbeen presented. A proof-of-concept demonstration of thisnew algorithm has also been sho-wri in details. The results, asdemonstrated in figures 5 and 6, show that although the PFresults are marginally better in terms of narrower uncertaintybounds and predicting the EOL earlier than the actualfailure; the GPR performance is satisfactory.
Future work involves implementation of the proposed newalgorithm on sensors in order to evaluate the algorithmsmore thoroughly as well as explore other challenges posedby such detailed implementations. Exploring other methodsof distributing the tasks as well different networkarchitectures for more optimized performance is animportant direction of future research as well.
Particle Filter Prediction
0 10 20 30 40 50 60 70
Time (weeks)
Figure 7. Distributed particle filter based EOLpredictions for battery capacity at week 52.
The tracking and prediction performance for the distributedparticle filter based battery pro gnostics is shown in figure 7.The squares represent the real data, while the solid linerepresents the mean tracking performance of the distributedPF until week 52. After week 52 the solid line represents themean PF prediction (62 week) with the cyan patch showingthe uncertainty bounds.
The execution time measurements were performed on thedistributed GPR implementations using MATLABsimulations as well. The distributed implementationexecution time usin g 2PEs was observed to be 1.313 secswhile for the execution time using a single PE was observedto be 1.780.5 secs-
6

[8] B. Saha and K. Goebel, "Uncertainty Managementfor Diagnostics and Prognostics of Batteries usingBayesian Techniques", in Proc. 2008 IEEEAerospace Conference, March 2008.
[9] K. Eswar. C.-H. Huang and P. Sadayappan, "OnMapping Data and Computation for Parallel SparseCholesky Factorization," In Proceedings of FifthSymposium on the Frontiers of Massively ParallelComputation,
BIOGRAPHY
Sankalita Saha is a researchscientist with Mission CriticalTechnologies at the PrognosticsCenter- of Excellence, NASA AmesResearch Center. She received theM.S. and PhD. degrees in
Electrical Engineering fi-omUniversity of Maryland, CollegePark in 2007. Prior to that sheobtained her B.Tech (Bachelor of
Technology) degree in Electronics and ElectricalCommunications Engineering from the Indian Institute ofTechnology, Kharagpur in 2002.
Bhaskar Saha received a Ph.D.degree from the School ofElectrical and ComputerEngineering at Georgia Institute ofTechnology, Atlanta, GA, USA in2008. He received the M.S. degreealso from the same school and hisB. Tech. (Bachelor of Technology)'AN degree from the Department ofElectrical Engineering, Indian
Institute of Technology, Kharagprrr, India. He is currently aResearch Scientist with Mission Critical Technologies at thePrognostics Center of Excellence, NASA Ames ResearchCenter. His research is focused on applying variousclassification, regression and state estimation techniquesfor predicting remaining useful life of systems and theircomponents, as well as developing hardware-in-the-looptestbeds and prognostic metrics to evahrate theirperformance. He has been an IEEE member since 2008 andhas published more than 10 papers on these topics.
Abhinav Saxena is a ResearchScientist with SGT Inc. at thePrognostics Center of ExcellenceNASA Ames Research Center, MoffetField CA. His research focus lies in
developing and evaluatingprognostic algorithms forengineering systems rising softcomputing techniques. He has a PhD
REFERENCES
[ 1 ] M. Roemer, C. Byington, G. Kacprzynski and G.Vachtsevanos, "An Overview of Selected PrognosticTechnologies with Reference to an Integrated PHMArchitecture", In Proc. of the First Intl. Forum onIntegrated System Health Engineering andManagement in Aerospace, 2005.
[2] J. Sclunalzel, F. Figueroa, J. Morris, S. Mandayamand R. Polikar, "An Architecture for IntelligentSystems Based on Smart Sensors", IEEETransactions on Instrumentation and Measurement,Vol. 54, No. 4, Aug. 2005, pp. 1612-1616.
[3] M. Prokopenko, P. Wang, D. C. Price, P. Valencia,M. Foreman, A. J. Fanner, "Self-organizingHierarchies in Sensor and ConununicationNetworks". Artificial Life, Special Issue on DynamicHierarchies, Vol. 11(4), 407- 426, 2005-
[4] K. Goebel, B. Saha, A. Saxena, J. Celaya, J.Christophersen, "Prognostics in Battery HealthManagement", In IEEE Instrumentation andMeasurement Magazine, 2008, Vol. 1(4). pp. 33-40.
[5] S. Saha, B. Saha and K. Goebel. "DistributedPrognostics Usin g Wireless Embedded Devices". InIEEE International Conference on Pro gnostics andHealth Management, Denver, CO, USA, October2008-
[6] S. Saha, B. Saha and K. Goebel. "CommunicationOptimizations for a Wireless Distributed PrognosticFramework". Proceedings of IEEE AerospaceConference, 2009, Big Sky, MT.
[7] V. Tresp, "A Bayesian Conunittee Machine", NeuralComputation archive, Vol. 12 , Issue 11, Nov.2000, pp.: 2719 — 2741.
[8] A. Choudhury, P. B. Nair, and A. J. Keane, "A dataparallel approach for large-scale Gaussian processmodelnig," Proceedings of the Second SIAMInternational Conference on Data Mining, Arlington,VA, USA, April 11-13, 2002.
[9] B. Saha, S. Saha, K. Goebel, "A DistributedPrognostic Health Management Architecture", InProceedings of MFPT, 2009.
[10]C. E. Rasmussen, and C. K. I. Williams, "GaussianProcesses for Machine Learning," The MIT PressCambridge MA, 2006.

in Electrical and Computer Engineering from GeorgiaInstitute of Technology, Atlanta. He earned his B.Tech in2001 from Indian Institute of Technology (IIT) Delhi, andMasters Degree in 2003 from Georgia Tech. Abhinav hasbeen a GM manufacturing scholar and is also a member ofIEEE, AAAI and ASME.
Kai Goebel Goebel is a seniorscientist at NASA Ames ResearchCenter where he leads the PrognosticsCenter of Excellence(prognostics. are. nasa.gov). Prior tothat, he worked at General Electric'sGlobal Research Center in Niskayuna,NY from 1997 to 2006 as a seniorresearch scientist. He has carried out
' applied research in the areas ofartifrcral intelligence, soft computing,
and information fission. His research interest lies in advancingthese techniques for real time monitoring, diagnostics, andprognostics. He has fielded numerous applications for aircraftengines, transportation systems, medical systems, andmanufacturing systems. He holds half a dozen patents and haspublished more than 75 papers. He received the degree ofDiplom-Ingenreur from the Technrsche Universitdt Munchen, Germany in1990. He received the MS. and Ph.D. front the University ofCalfornia atBerkeley in 1993 and 1996, respectively.