developmentof an experimental and test … · page1 developmentof an experimental and test...
TRANSCRIPT

page 1
Development of an Experimental and Test Environment for
Vehicle Real-Time Simulations
Dr.-Ing. Gerd Bitsch
Bonn - Bad Godesberg,
November 20th-21st 2007

page 2
Department MDF
• Simulation of mechatronicsystems
• CAE Durability (MBS, FEM, durability life prediction)
• Statistical testing / design target loading
Fraunhofer ITWMat Fraunhofer-Zentrum Kaiserslautern
• 150 employees
• Operating budget 2006: 11 Mio Euro
Department MDF @ Fraunhofer ITWM
page 3
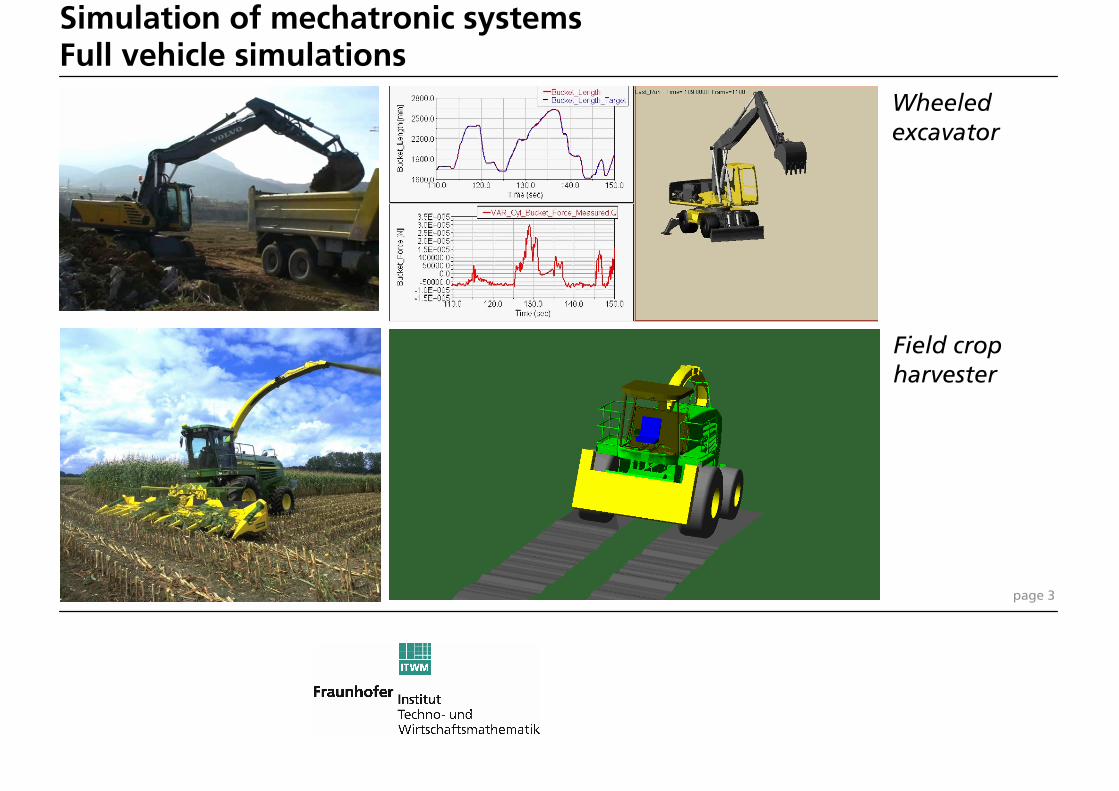
Simulation of mechatronic systemsFull vehicle simulations
Wheeledexcavator
Field cropharvester

page 4
Simulation of mechatronic systems
Servo – hydraulic test rigs

page 10
• Joint innovation project of Fraunhofer Institutes with industrial partners
• Research
• Method development
• Transfer and application (application projects)
• Funding: 10 Mio. € for first 3 years
• Bund (BMBF) – preparation: 700.000 €
• Rheinland-Pfalz: 3 Mio. €
• Fraunhofer: 3 Mio. €
• Industry: 4 Mio. €
• Operational since April 2007
Fraunhofer Innovation Cluster ‚Digital Engineering for Commercial Vehicles’

page 11
• DaimlerChrysler (Wörth & Stuttgart)
• John Deere (Mannheim & Zweibrücken )
• Schmitz Cargobull (Altenberge)
• Keiper (Kaiserslautern)
• GE Transportsysteme (Bad Dürkheim)
• Volvo CE (Trier)
• Haldex Brake (Heidelberg)
• MB-tech (Sindelfingen)
• Robert Bosch (Schwieberdingen)
Industrial partners

page 12
Development of an Experimental and Test Environment forVehicle Real-Time Simulations: Objective
Objective: Providing an experimental and test environment for real time simulations in combination with the physical world. The two main parts are:
Micro-Autobox and a 3 GHz AMD Opteron
Real time simulation environment:on the one hand high-performance, on
the other mobile in a vehicle forprototyping
Vehicle-Hardware-Infrastructur:physical vehicle model, CAN-Bus, data logging…

page 13
Physical model of the truck (scale 1:10)
• a ready to use model was not available(most components have beenmanufactured individually)
• realistic scale, e. g. for axes(air suspension, hydraulic brakes,…)according to a Mercedes-Benz ACTROS
History:
• Concept end of year 2006
• Aquirering components until april 2007
• April 2007- September 2007: building the vehicle as part of student research project

page 14
Real time simulation environment (dSpace)
• 2 hardware real time environments
– dSpace MicroAutobox(mobile, 800MHz, several interfaces as CAN, A/D- and D/A-converters etc.)
– dSpace DS1006 (stationary, 3GHz Opteron)
History:
• Obtaining hardware may 2007
• Initation of the system june-august 2007
dSpace ControlDesk and MotionDesk combined with Matlab Simulink
• End of august 2007: first working models on dSpace using CodeExport and Simpack

page 15
SIMULINK model
SIMPACK Element library for dSpace (ds1005, ds1006)
<model>.ppc for ds1005
<model>.x86 for ds1006
Control Desk
CodeExport
RTW
Real time simulation environment (dSpace)Work flow
page 16<model>.data_base
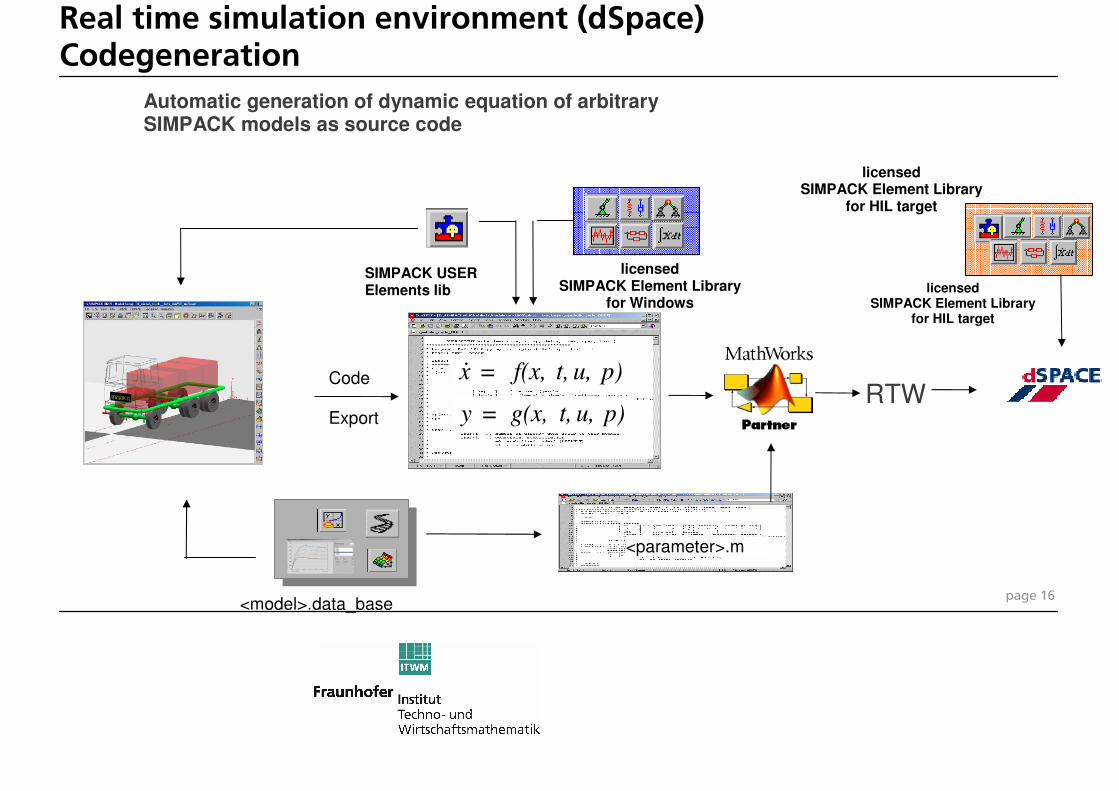
Code
Export
<parameter>.m
licensed SIMPACK Element Library
for Windows
SIMPACK USER Elements lib
p)u,t,f(x,=xɺ
p)u,t,g(x,=yRTW
licensed SIMPACK Element Library
for HIL target
Automatic generation of dynamic equation of arbitrary SIMPACK models as source code
Real time simulation environment (dSpace)Codegeneration
licensed SIMPACK Element Library
for HIL target

page 17
code_export_f90.libfor Windows
code_export_C.libfor Windows
code_export_C.libfor HIL-target
<model>.f Create S-function
<model>.c Create S-function
convert (ForC)
compile for HIL-target
Licensed libraries in
SIMPACK installation
RTW HIL
SIL
Real time simulation environment (dSpace)Libraries

page 18
Truck model (physical und virtual) Controls
CAN BusCAN Bus
Wireless-CAN
remote control RC-Receiver
ControlDesksteering
Micro-Autobox and/or3GHz AMD Opteron

page 19
Truck model (physical) Actuators
CAN BusCAN Bus
Wireless-CAN
microprocessor
gear box
cruise control
air spring – servo valve
steering
page 20
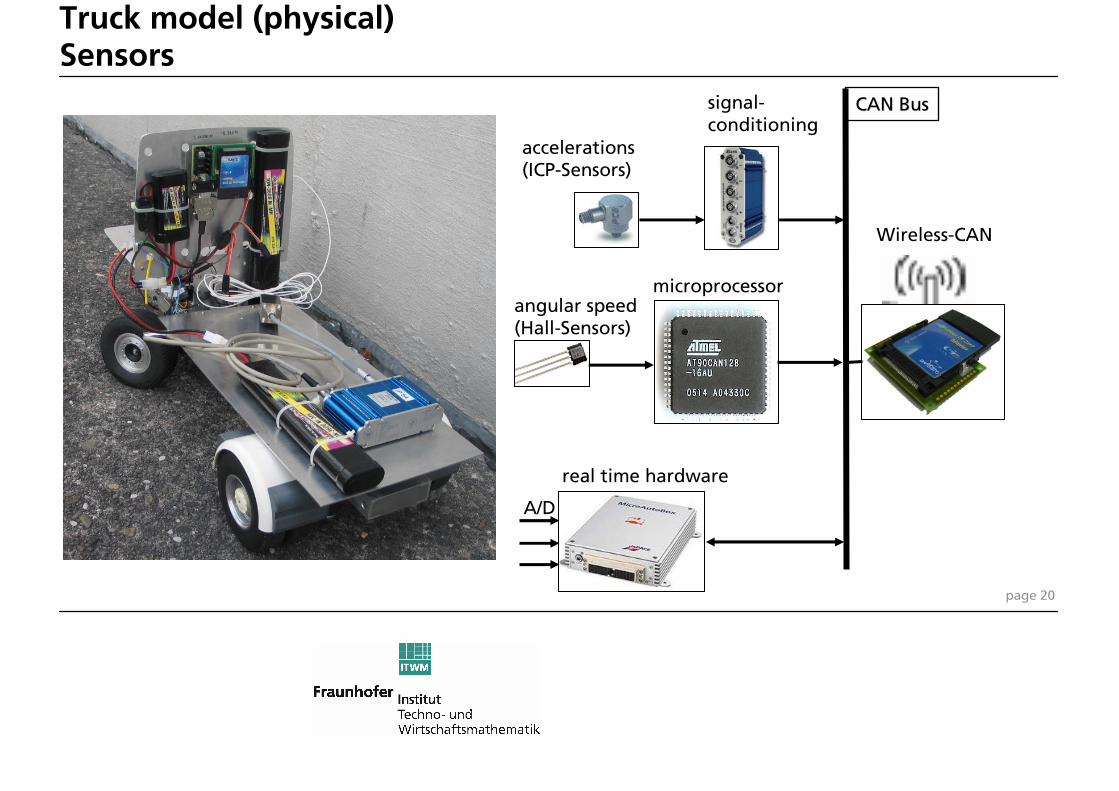
Truck model (physical) Sensors
CAN BusCAN Bus
angular speed(Hall-Sensors)
microprocessor
accelerations(ICP-Sensors)
real time hardware
A/D
Wireless-CAN
signal-conditioning

page 21
Truck model (physical) Example for coupling sensors/aktuators
CAN BusCAN Bus
Wireless-CAN
Disc brake – brake actuator
rotary speed(Hall-Sensors)

page 22
Truck model (virtual) Simulation
CAN BusCAN Bus
Wireless-CAN
Micro-Autobox and/or3GHz AMD Opteron
ControlDesksteering
MotionDesk
PC (Visualisation)
Real time Real time Real time Real time simulationsimulationsimulationsimulation

page 23
Summary
• ITWM/MDF: until now mostly simulation of complex mechanical and mechatronicsystems (full vehicles, test rigs,…)
• real time simulation environment established in 2007:
– two real time hardware platforms (MicroAutoboc, DS1006)
– physical vehicle model, including wireless CAN-Bus, measurement equipment
• current and future work
– development of model based monitoring solutions
– studies concerning complexity of models vs. computing hardware
– studies concerning solver technologies
– several real life applications with OEMs