development of novel eddy current dampers for …...development of novel eddy current dampers for...
TRANSCRIPT

Development of Novel Eddy Current
Dampers for the Suppression of
Structural Vibrations
by
Henry A. Sodano
Dissertation Submitted to the Faculty of the
Virginia Polytechnic Institute and State University
in partial fulfillment of the requirements for the degree of
Doctorate of Philosophy in
Mechanical Engineering
Dr. Daniel J. Inman, Chair Dr. Donald J. Leo Dr. Gyuhae Park
Dr. Harry H. Robertshaw Dr. W. Keith Belvin
May 5, 2005 Blacksburg, Virginia
Keywords: Eddy current damper, inflatable satellite, electromagnetic damper, membrane,
vibration suppression, viscous damping, magnetic damping
Copyright 2005, Henry A. Sodano

Development of Novel Eddy Current Dampers for the
Suppression of Structural Vibrations
Henry A. Sodano
Abstract
The optical power of satellites such as the Hubble telescope is directly related to the size of the
primary mirror. However, due to the limited capacity of the shuttle bay, progress towards the
development of more powerful satellites using traditional construction methods has come to a
standstill. Therefore, to allow larger satellites to be launched into space significant interest has
been shown in the development of ultra large inflatable structures that can be packaged inside the
shuttle bay and then deployed once in space. To facilitate the packaging of the inflated device in
its launch configuration, most structures utilize a thin film membrane as the optical or antenna
surface. Once the inflated structure is deployed in space, it is subject to vibrations induced
mechanically by guidance systems and space debris as well as thermally induced vibrations from
variable amounts of direct sunlight. For the optimal performance of the satellite, it is crucial that
the vibration of the membrane be quickly suppressed. However, due to the extremely flexible
nature of the membrane structure, few actuation methods exist that avoid local deformation and
surface aberrations.
One potential method of applying damping to the membrane structure is to use magnetic
damping. Magnetic dampers function through the eddy currents that are generated in a
conductive material that experiences a time varying magnetic field. However, following the
generation of these currents, the internal resistance of the conductor causes them to dissipate into
heat. Because a portion of the moving conductor’s kinetic energy is used to generate the eddy
currents, which are then dissipated, a damping effect occurs. This damping force can be
described as a viscous force due to the dependence on the velocity of the conductor.

iii
While eddy currents form an effective method of applying damping, they have normally been
used for magnetic braking applications. Furthermore, the dampers that have been designed for
vibration suppression have typically been ineffective at suppressing structural vibration,
incompatible with practical systems, and cumbersome to the structure resulting in significant
mass loading and changes to the dynamic response. To alleviate these issues, three previously
unrealized damping mechanisms that function through eddy currents have been developed,
modeled and tested. The dampers do not contact the structure, thus, allowing them to add
damping to the system without inducing the mass loading and added stiffness that are typically
common with other forms of damping. The first damping concept is completely passive and
functions solely due to the conductor’s motion in a static magnetic field. The second damping
system is semi-active and improves the passive damper by allowing the magnet’s position to be
actively controlled, thus, maximizing the magnet’s velocity relative to the beam and enhancing
the damping force. The final system is completely active using an electromagnet, through which
the current can be actively modified to induce a time changing magnetic flux on the structure and
a damping effect.
The three innovative damping mechanisms that have resulted from this research apply control
forces to the structure without contacting it, which cannot be done by any other passive vibration
control system. Furthermore, the non-contact nature of these dampers makes them compatible
with the flexible membranes needed to advance the performance of optical satellites.
iv
Acknowledgments
First I would like to extend my sincerest thanks to my advisor Dr. Daniel J. Inman for his
support throughout my work, insight and lighthearted nature that has made working in CIMSS
truly a pleasure. Additionally, Dr. Inman’s sense of humor provides a good laugh and smile
everyday that he is in town. I would also like to graciously thank Dr. Gyuhae Park who has
acted as a mentor throughout my graduate studies, and my committee member Dr. Donald J. Leo
for his advice throughout both my Master’s and Ph.D programs. I also owe Dr. Leo much
gratitude for providing me with a chance to perform research at CIMSS, without his and Dr.
Inman’s invitation to do summer research I am sure that I would not have had such a pleasurable
experience as a graduate student. Additionally, I would like that thank Dr. Jae-sung Bae for
helping me get started into the modeling of magnetic fields and Dr. Moon Kwak for introducing
me to the concept of eddy current damping. I am also thankful to Dr. W. Kieth Belvin who has
provided me with a NASA GSRP fellowship throughout my Ph.D. studies and encouraged me to
work in the area of magnetic fields.
I would also like to thank my family for their support and love throughout my undergraduate
and graduate studies. Their encouragement convinced me that a graduate degree was the best
direction for me to take, which I am now sure was the correct choice. In addition, I would like to
thank my fiancé Lisa Franks for her support and encouragement throughout all the long hours
spent in the laboratory. Finally, I must extend thanks to all the members of CIMSS, so many of
which have provided me with insight and ideas for successfully completing this research effort.

v
Table of Contents
Chapter 1 Introduction 1
1.1 Introduction to Eddy Currents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Motivation for Research . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Literature Review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3.1 Inflatable Satellites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
History of Inflatable Satellites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Dynamic Testing and Control of Inflatable Satellite Components . . . . . . 6
Smart Materials for Dynamic Testing and Control of Inflatable
Structures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3.2 Dynamic Modeling, Testing and Control of Membranes . . . . . . . . . . . . 11
Theoretical Modeling of Membranes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Dynamic Testing and Analysis of Membranes . . . . . . . . . . . . . . . . . . . . 14
Control Methods for Optical Membranes . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3.3 Eddy Current Damping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Eddy Current Braking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Magnetic Damping of Rotor Vibration . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Eddy Current Damping of Structural Vibrations . . . . . . . . . . . . . . . . . . . 31
1.4 Dissertation Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1.4.1 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1.4.2 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Chapter 2 Modeling of Passive Eddy Current Dampers 44
2.1 Introduction to Eddy Currents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.2 Theoretical Model of the Passive Eddy Current Damper . . . . . . . . . . . . . . . . . 46
vi
2.2.1 Passive Eddy Current Damper Configuration . . . . . . . . . . . . . . . . . . . . . 46
2.2.2 Eddy Current Damping Force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.2.3 Application of the Image Method for a Finite Conductor . . . . . . . . . . . . 51
2.2.4 Modeling of Beam with Eddy Current Damping Force . . . . . . . . . . . . . . 54
2.2.5 Modeling of Slender Membrane under Axial Load with Eddy
Current Damping Force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.3 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Chapter 3 Experimental Verification of Passive Eddy Current
Damper Models 63
3.1 Chapter Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.2 Experimental Testing and Results of the Passive Eddy Current
Damper Concept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.2.1 Passive Eddy Current Damper Experimental Setup . . . . . . . . . . . . . . . . 65
3.2.2 Results of Model and Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Numerical Calculation of the Magnetic Flux . . . . . . . . . . . . . . . . . . . . . . 68
Validation of Eddy Current Damping Model through Experiments . . . . 70
3.3 Experimental Testing and Results of the Improved Passive Eddy Current
Damper Concept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.3.1 Passive Eddy Current Damper Experimental Setup. . . . . . . . . . . . . . . . . 76
3.3.2 Results of Model and Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Numerical Calculation of the Magnetic Flux . . . . . . . . . . . . . . . . . . . . . . 78
Validation of Model through Experiments . . . . . . . . . . . . . . . . . . . . . . . 80
3.4 Experimental Testing and Results of the Passive Eddy Current Damper
Applied to a Slender Membrane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.4.1 Experimental Setup and Membrane Test Apparatus . . . . . . . . . . . . . . . . 84
3.4.2 Results of the Model and Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.5 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Chapter 4 Development of a New Passive-Active Magnetic Damper 96
4.1 Passive Active Damper Concept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
vii
4.2 Model of the Passive-Active Eddy Current Damper . . . . . . . . . . . . . . . . . . . . 97
4.2.1 Model of the Eddy Current Damping Force . . . . . . . . . . . . . . . . . . . . . . 98
4.2.2 Modeling of Cantilever Beam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4.2.3 Controller Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
4.3 Experimental Setup of Passive-Active Damper . . . . . . . . . . . . . . . . . . . . . . . 105
4.4 Discussion of Results from Model and Experiments . . . . . . . . . . . . . . . . . . . 107
4.4.1 Tuning of the Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
4.4.2 Linearization of Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.4.3 Results and Validation of Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
4.5 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Chapter 5 Active Eddy Current Damping System 117
5.1 Introduction to the Active Eddy Current Controller . . . . . . . . . . . . . . . . . . . . 117
5.2 Theoretical Model of the Active Eddy Current Damper . . . . . . . . . . . . . . . . 119
5.2.1 Calculation of the Eddy Current Damping Force . . . . . . . . . . . . . . . . . 119
5.2.2 Inclusion of Active Damping in Beam Equation . . . . . . . . . . . . . . . . . . 124
5.2.3 Controller Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
5.3 Experimental Setup of Active Damping System . . . . . . . . . . . . . . . . . . . . . . 128
5.4 Discussion of Results from Model and Experiments . . . . . . . . . . . . . . . . . . . 130
5.4.1 Validation of Double Forcing Frequency . . . . . . . . . . . . . . . . . . . . . . . 130
5.4.2 Tuning of the Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
5.4.3 Results and Validation of Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
Identification of Model Inaccuracy Source . . . . . . . . . . . . . . . . . . . . . . 135
5.5 Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
Chapter 6 Conclusions 145
6.1 Brief Summary of Thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
6.2 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
6.3 Recommendations for Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Bibliography 154
viii
Appendix A Elliptic Integrals Associated with the Magnetic Flux of a 167
Cylindrical Permanent Magnet
Vita 170

ix
List of Tables
3.1 Physical properties of the beam, conductor, and magnet . . . . . . . . . . . . . . . . . . . 66
3.2 Physical properties of the beam, conductor and magnet . . . . . . . . . . . . . . . . . . . 85
3.3 Bending and torsional natural frequencies of the membrane with a tension
of 8.9N at both vacuum and ambient pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.1 Physical properties of the beam, conductor and magnet . . . . . . . . . . . . . . . . . . 105
4.2 Filter parameters used in experiments and model . . . . . . . . . . . . . . . . . . . . . . . 112
5.1 Physical properties of the beam, conductor and magnet . . . . . . . . . . . . . . . . . . 128
5.2 Filter parameters used in the experiments and theory . . . . . . . . . . . . . . . . . . . . 135
5.3 Filter parameter used in the experiments and predicted by the theoretical
simulation when the transfer function of the coil is included . . . . . . . . . . . . . . 139
x
List of Figures
1.1 Concept of the inflated satellite (Freeland et al. 1997) . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Spartan 207/Inflatable Antenna Experiment in orbit (Figure from NASA) . . . . . . . . . . . 6 1.3 Schematic of conductive material passing through a magnetic field and the generation
of eddy currents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.1 Configuration of the passive eddy current damper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.2 Magnetic field and the eddy currents induced in the cantilever beam . . . . . . . . . . . . . . . 47
2.3 Schematic of the Circular magnetized strip depicting the variable used in the analysis . 50
2.4 Schematic demonstrating the effect of the imaginary eddy currents . . . . . . . . . . . . . . . . 52
2.5 Schematic showing the variables associated with the conducting plate . . . . . . . . . . . . . 54
2.6 Schematic of the configuration of the membrane and permanent magnet . . . . . . . . . . . . 58
3.1 Schematic showing the magnetic flux of one and two magnets . . . . . . . . . . . . . . . . . . . 64
3.2 Schematic showing the dimensions of the beam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.3 Experimental setup of the aluminum beam and eddy current damper . . . . . . . . . . . . . . . 67
3.4 Magnetic flux and contour of yB for a single magnet . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.5 Magnetic density distributions in y direction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.6 Eddy current density before and after the image method is applied . . . . . . . . . . . . . . . . 70
3.7 Experimental and predicted beam response to an initial displacement with
magnet located a distance of 2mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.8 Experimental and predicted beam response to an initial displacement with
magnet located a distance of 4mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.9 Experimentally measured damped and undamped frequency response of the beam . . . . 73
3.10 Predicted and experimentally measured frequency response of the beam with
the magnet at a distance of 2mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
xi
3.11 Experimentally measured and predicted damping ratio of the first mode as
a function of the gap between the magnet and beam . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.12 Experimentally measured and predicted damping ratio of the second mode
as a function of the gap between the magnet and beam . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.13 Experimentally measured and predicted damping ratio of the third mode as
a function of the gap between the magnet and beam . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.14 Experimentally measured and predicted damping ratio of the fourth mode as
a function of the gap between the magnet and beam . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.15 Experimental setup showing position of magnets and conducting plates . . . . . . . . . . . . 77
3.16 Magnetic flux lines with contours of the radial flux By for two magnets . . . . . . . . . . . . 79
3.17 Magnetic flux density yB for a case of 0.2gl b = . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.18 Experimentally obtained frequency response of the system before and after
placement of the magnets a distance of 1mm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.19 Time response of the beam to an initial displacement when one and two
magnets are present at a distance of 2.5mm from the conductor . . . . . . . . . . . . . . . . . . . 81
3.20 Measured and predicted frequency response of the beam for the case that the
magnet is located 4mm from the beam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
3.21 Experimental and predicted damping ratio of the beam’s first mode as a
function of the gap between the magnet and beam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.22 Dimensions of membrane strip and location of copper conductor . . . . . . . . . . . . . . . . . 85
3.23 Experimental setup used to determine the damping effect of the permanent
magnet as the distance form the conductor is varied . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.24 Experimental setup in the vacuum chamber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.25 Measured frequency response without magnet and with magnet a distance
of 1mm from membrane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.26 Measured frequency response without magnet and with magnet a distance
of 1mm from membrane at vacuum pressure and at an axial load of 8.9N . . . . . . . . . . . 89
3.27 Measured frequency response at ambient and vacuum pressure with magnet
gap of 2mm and an axial load of 8.9N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
3.28 Measured damping ratio of membrane at both ambient and vacuum pressure
with an axial load of 8.9N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
3.29 Measured and predicted damping ratio of membrane at ambient pressure with
an axial load of 8.9N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92

xii
3.30 Measured and predicted damping ratio of membrane at vacuum pressure with
an axial load of 8.9N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
4.1 Cantilever beam in magnetic field generated by permanent magnet . . . . . . . . . . . . . . . . 98
4.2 schematic showing the variables associated with the conducting plate . . . . . . . . . . . . . 101
4.3 Damping force as a function of the distance form beam to magnet . . . . . . . . . . . . . . . 102
4.4 Block diagram of controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.5 Root locus of the closed loop system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.6 Schematic showing the dimensions of the beam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.7 Layout of the experimental system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.8 Effect of varying the filter frequency on the frequency response . . . . . . . . . . . . . . . . . 107
4.9 Effect of varying the filter damping ratio on the frequency response . . . . . . . . . . . . . 108
4.10 Linear and nonlinear time response of the beam before and after control . . . . . . . . . . 109
4.11 Experimentally measured and predicted frequency response of second mode for
controlled system compared to the case of passive eddy current damping and
no added damping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
4.12 Experimentally measured and predicted frequency response of first mode for
controlled system compared to the case of passive eddy current damping and
no added damping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
4.13 Experimentally measured and predicted frequency response of the beam before
and after passive-active control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
4.14 Measured and predicted time response of the beam vibrating at its first bending
mode with the controller turned on at 1.0 second . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
4.15 Measured and predicted time response of the beam vibrating at its second
bending mode with the controller turned on at 0.5 seconds . . . . . . . . . . . . . . . . . . . . . 113
4.16 Initial displacement response of the beam with passive damping and
passive-active damping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
5.1 Schematic showing the configuration of the active eddy current Damper . . . . . . . . . . 119
5.2 Schematic of the Circular magnetized strip depicting the variable used in
the analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
5.3 Block diagram of feedback control system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
5.4 Frequency response of beam for the uncontrolled case and the case that a
single or two zeros are located in the numerator of the control filter . . . . . . . . . . . . . . 127
xiii
5.5 Schematic showing the dimensions of the beam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
5.6 Experimental setup of active eddy current damper . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
5.7 Experimental setup used to verify the force doubling effect . . . . . . . . . . . . . . . . . . . . . 130
5.8 Applied current and the resulting eddy current force, demonstrating the force
occurs at twice the applied frequency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
5.9 Experimentally measured and predicted frequency response of second mode for
controlled system compared to the case that no damping is added . . . . . . . . . . . . . . . . 134
5.10 Experimentally measured and predicted frequency response of first mode for
controlled system compared to the case that no damping is added . . . . . . . . . . . . . . . . 134
5.11 Measured and predicted controlled response of the cantilever beam’s first three bending
modes compared to the uncontrolled case . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
5.12 Experimental setup used to measure the magnetic field generated by the permanent
magnet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
5.13 Frequency response of the current applied to the coil and the force generated
between the coil and a permanent magnet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
5.14 Measured and predicted controlled response of the beam’s first two bending modes
compared to the uncontrolled case when the transfer function of the electromagnet is
included. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
5.15 Measured and predicted time response of the beam excited at its first bending
mode with the controller turned on at 2.0 seconds . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
5.16 Measured and predicted time response of the beam excited at its second
bending mode with the controller turned on at 1.5 seconds . . . . . . . . . . . . . . . . . . . . . 140
5.17 Experimental control of the beam’s first five modes . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
5.18 Initial displacement response of the beam with the active controller and the passive-active
damper developed in chapter 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
xiv
Nomenclature
A Magnetic potential
A Half the conductor’s length
B Magnetic flux density
b Radius of the circular magnet
C Damping matrix
cb Damping of beam
ce Eddy current damping coefficient
D Non-conservative forces
δ Thickness of conductor and Dirac delta function
E′ Electric field
E Modulus of elasticity
F Damping force
F Concentrated forces
FT Transformer eddy current damping force
FM Motional eddy current damping force
f Distributed forces
G Arbitrary continuous vector field
I Moment of Inertia
I(t) Electric current
J Eddy current density
K Stiffness matrix
K Controller gain
L Length of the magnet
ℓ Continuous line
xv
lg Gap length between magnet and conductor
M Mass matrix
M0 Magnetization
µ0 Permeability of free space
P Axial load
( )xφ Assumed mode shapes
eφ Magnitude of mode shape at location of eddy current damper
Q External forces
ρ Area density
r(t) Temporal coordinate
rc Equivalent radius of the conductor
S Continuous surface
s Laplace coordinate
σ Conductivity
T Kinetic Energy
t time
U Potential Energy
u Displacement
V Volume
v Velocity of conductor
vb velocity of beam in z direction
vz velocity of beam in z direction
vm velocity of magnet in z direction
w Displacement
ω frequency
ωf Control filter frequency
ζf Control filter damping ratio
∇ Gradient
1
Chapter 1
Introduction
1.1 Introduction to Eddy Currents
There exist many methods of adding damping to a vibrating structure; however, very few can
function without ever coming into contact with the structure. One such method is eddy current
damping. This magnetic damping scheme functions through the eddy currents that are generated
in a nonmagnetic conductive material when it is subjected to a time changing magnetic field. The
magnitude of the magnet field on the conductor can be varying through movement of the
conductor in a stationary magnetic field, by movement of a constant intensity magnetic source or
changing the magnitude of the magnetic source with respect to a fixed conductor. Once the eddy
currents are generated, they circulate in such a way that they induce their own magnetic field with
opposite polarity of the applied field causing a resistive force. However, due to the electrical
resistance of the conducting material, the induced currents will dissipated into heat at the rate of
I2R and the force will disappear. In the case of a dynamic system the conductive metal is
continuously moving in the magnetic field and experiences a continuous change in flux that
induces an electromotive force (emf), allowing the induced currents to regenerate. The process of
the eddy currents being generated causes a repulsive force to be produced that is proportional to
the velocity of the conductive metal. Since the currents are dissipated, energy is being removing
from the system, thus allowing the magnet and conductor to function like a viscous damper.
One of the most useful properties of an eddy current damper is that it forms a means of
removing energy from the system without ever contacting the structure. This means that unlike

2
other methods of damping such as constrained layer damping, the dynamic response and material
properties are unaffected by its addition into the system. Furthermore, many applications require
a damping system that will not degrade in performance over time. This is not the case for other
viscous dampers, for instance many dampers require a viscous liquid which may leak over time.
These two points are just a few of the many advantages offered by eddy current damping systems.
However, effective methods of utilizing the eddy current effect to suppress the transverse
vibrations experienced by many structures have not yet been developed. Therefore, this
dissertation will develop several eddy current damping systems that can be efficiently used to
suppress structural vibrations.
1.2 Motivation for Research
The motivation for this research lies in the development of large inflatable space structures.
Over the past few decades inflatable structures have gained significant attention for future space
applications due to their potential low mass and ability to become extremely large once deployed.
One particularly important task is to understand the dynamic behavior of satellite structures since
they are subjected to a variety of dynamic loadings. The typical configuration of an inflatable
satellite is shown in Figure 1.1, where the optical or antenna surface is formed by stretching a thin
flexible membrane inside of an inflated torus. However, in the case of the membrane surface,
their extremely low mass, flexibility, and high damping properties pose complex problems for
dynamic testing and analysis. The choice of applicable sensing and actuation systems suitable for
use with membrane structures are somewhat limited because of their low stiffness and high
flexibility. Furthermore, excitation methods have to be carefully chosen since the exceptionally
flexible nature causes point excitation to result in only local deformation.
Once in space the inflated structure is subject to vibrations induced mechanically by guidance
systems and space debris as well as thermally induced vibrations from variable amounts of direct
sunlight. Due to the strict surface tolerances needed for both optical and antenna applications,
these vibrations can cause the inflated devices functionally to be severally degraded. Therefore,
methods of suppressing the vibration of the membrane must be developed for the device to
perform optimally. However, due to the extremely flexible nature of the membrane surface
control techniques that do not cause localized imperfections in the surface quality must be used.
The research presented in this dissertation will be aimed at providing a means of accomplishing

3
this difficult task. Through the use of magnetic fields and the eddy currents that are generated in
a non-magnetic conductive material, passive, passive-active and active non-contact control
schemes will be developed to suppress the transverse vibrations of a membrane. These methods
of vibration attenuation not only avoid localized imperfections by generating distributed forces,
but also add significant damping to the structure while avoiding mass loading and added stiffness,
thus allowing the dynamics to be unaffected by the addition of the damper into the system.
Furthermore, because the eddy current dampers developed are not attached to the structure, their
installation does not perturb the structure’s properties.
Figure 1.1: Concept of the inflated satellite (Freeland et al. 1997).
1.3 Literature Review
The following sections will discuss research that has been previously carried out in the topics
of inflatable structures, dynamic testing and control of membranes and eddy current damping.
The literature review will flow in the listed order, to first describe the structure holding the
membrane, then progress to the component of interest in this study and finally to the concept that
will be utilized to accomplish our goal of vibration suppression of a membrane structure.

4
1.3.1 Inflatable Satellites
Inflatable satellites have become increasingly popular over the past few decades. These
structures pose certain advantages over traditional satellites, such as minimal launch mass and
volume. The satellite is compactly packaged before its launch into space and once in orbit the
structure is deployed and inflated. Because the satellite is packaged for the duration of time it is
in the shuttle bay, the device can be made to become far larger than any other solid satellite. This
advantage is necessary for space antennas, which require very large surface areas. However,
these advantages do carry a drawback; the dynamics of inflatable structures are considerably
more difficult to analyze and test than a ridged structure. While there has been extensive research
into the analysis of inflatable structures the amount of experimental ground testing of their
dynamics had until recently seen far less attention. For the inflatable satellite to succeed, it is
critical that these dynamics be understood.
History of Inflatable Satellites
The beginning of inflatable satellites was marked by the development of three inflatable
devices by the Goodyear Corporation. In a period of time stretching from the late 1950’s to the
early 1960’s, Goodyear developed an inflatable search antenna, radar calibration sphere and
lenticular inflatable parabolic reflector (Freeland et al., 1998). The search antenna used a
rigidizing support structure that was able to fold up into a compact, lightweight package. The
radar calibration sphere provided significant advances in the area of thin film handling,
processing and manufacturing (Jenkins, 2001). The third structure developed at Goodyear was
the lenticular inflatable parabolic reflector that pioneered some of the inflatable satellite
technology presently used, including the construction of an antenna supported in a toroidal ring.
These early developments in inflatable technology provided key innovations in the areas of
fabrication, bonding of structural elements, packaging and deployment.
The innovative structures built at Goodyear were the first to use inflatable technology,
however, none of their structures made it into space. The proof that inflatable satellites could be
effectively deployed in space was demonstrated with NASA’s launch of the Echo 1A satellite on
August 12th 1960. The Echo 1A satellite (often referred to as the Echo 1 satellite due to a launch
vehicle failure before deployment of the actual Echo 1 satellite) was a 30.5 m diameter balloon
constructed of 12.7 micron thick metallized mylar, designed to act as a passive communications
5
reflector. One of the major reasons for using inflatable satellites is their extremely efficient use
of space when packaged; this was shown with the Echo 1 that had an inflated diameter of 30.5m
and a packaged diameter of 66cm. The Echo 1 was functional and used to redirect
transcontinental and intercontinental telephone, radio and television signals. This pioneering
satellite in the field of inflatable structures was followed by the Echo 2 satellite in January of
1964. However, following the launch of Echo 2 the inflatable satellite program died down and
would not see another functional satellite launch for 32 years.
After the Echo Balloons program, the European Space Agency (ESA) began to show interest
in inflatable structures by sponsoring the structural concept development of reflector antenna and
sun shades at the Contraves Space Division in Switzerland. From the late 1970’s till the early
1980’s two antenna were built and tested but were never functional like the Echo 1 and 2
balloons. This program did however make progress in the field of inflatable structures. One of
the antennas that they constructed was tested for the surface precision of the reflector and other
mechanical characteristics. The researchers found that the 10 x 12 meter antenna had a reflection
precision of a few millimeters root mean square (RMS), Freeland et al. (1998) states that this
accuracy is quite good for the antenna’s size. Additionally, this antenna used provided the key
innovation of developing methods of rigidizing the flexible materials subsequent to deployment.
Following the ESA’s inflatable satellite program, NASA began sponsoring the In-Space
Technology Experiments Program’s (In-STEP) Inflatable Antenna Experiment (IAE) that
resulted in the launch of the next functional inflatable satellite. On May 19, 1996 the Space
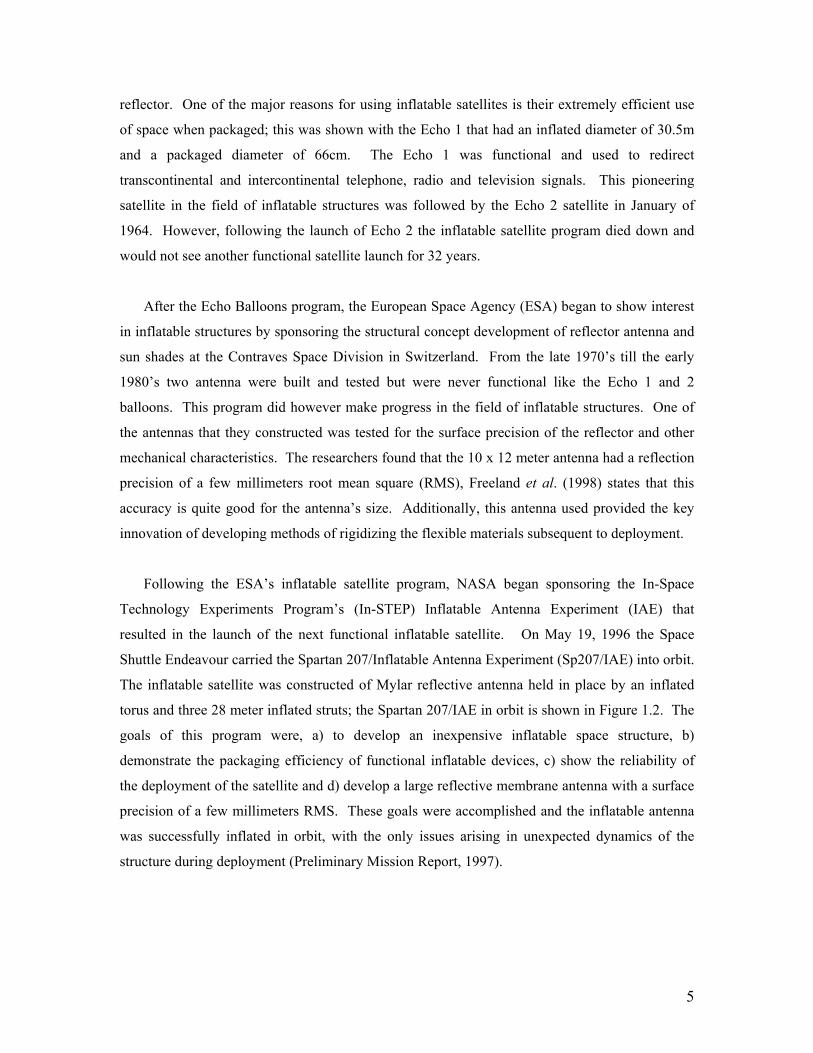
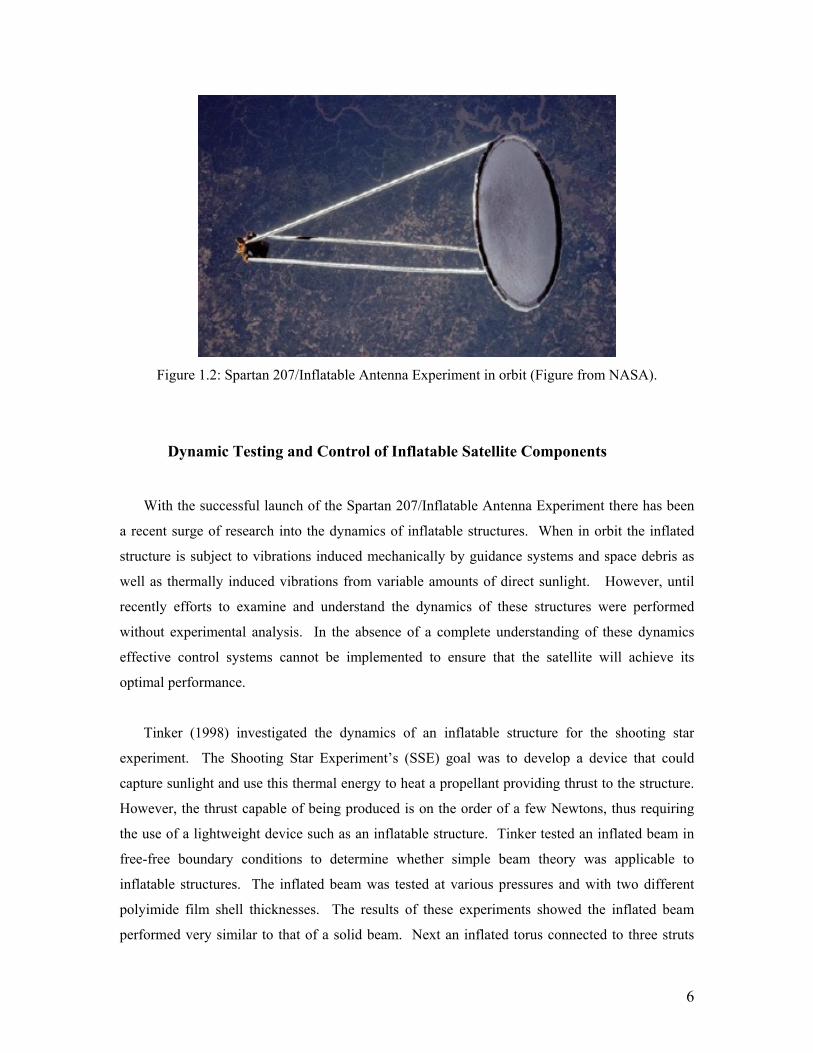
Shuttle Endeavour carried the Spartan 207/Inflatable Antenna Experiment (Sp207/IAE) into orbit.
The inflatable satellite was constructed of Mylar reflective antenna held in place by an inflated
torus and three 28 meter inflated struts; the Spartan 207/IAE in orbit is shown in Figure 1.2. The
goals of this program were, a) to develop an inexpensive inflatable space structure, b)
demonstrate the packaging efficiency of functional inflatable devices, c) show the reliability of
the deployment of the satellite and d) develop a large reflective membrane antenna with a surface
precision of a few millimeters RMS. These goals were accomplished and the inflatable antenna
was successfully inflated in orbit, with the only issues arising in unexpected dynamics of the
structure during deployment (Preliminary Mission Report, 1997).
6
Figure 1.2: Spartan 207/Inflatable Antenna Experiment in orbit (Figure from NASA).
Dynamic Testing and Control of Inflatable Satellite Components
With the successful launch of the Spartan 207/Inflatable Antenna Experiment there has been
a recent surge of research into the dynamics of inflatable structures. When in orbit the inflated
structure is subject to vibrations induced mechanically by guidance systems and space debris as
well as thermally induced vibrations from variable amounts of direct sunlight. However, until
recently efforts to examine and understand the dynamics of these structures were performed
without experimental analysis. In the absence of a complete understanding of these dynamics
effective control systems cannot be implemented to ensure that the satellite will achieve its
optimal performance.
Tinker (1998) investigated the dynamics of an inflatable structure for the shooting star
experiment. The Shooting Star Experiment’s (SSE) goal was to develop a device that could
capture sunlight and use this thermal energy to heat a propellant providing thrust to the structure.
However, the thrust capable of being produced is on the order of a few Newtons, thus requiring
the use of a lightweight device such as an inflatable structure. Tinker tested an inflated beam in
free-free boundary conditions to determine whether simple beam theory was applicable to
inflatable structures. The inflated beam was tested at various pressures and with two different
polyimide film shell thicknesses. The results of these experiments showed the inflated beam
performed very similar to that of a solid beam. Next an inflated torus connected to three struts

7
was tested in ambient conditions with three different inflation pressures, 1.72, 3.45, and 6.89
kPag, in order to characterize the dynamics with a varying internal pressure. An electromagnetic
shaker was mounted to the support plate and used to excite the structure. It was found that the
natural frequencies and mode shapes had considerable change for each different internal pressure.
This test was necessary because as the satellite passes from orbital eclipse to orbital day the
internal pressure could experience significant variations. The inflated torus was also inflated in a
vacuum chamber to determine whether the structure could properly inflate and hold pressure,
Tinker comments that the results were very encouraging.
In later experiments, Slade et al. (2001) tested the dynamics of the inflated torus with three
struts from the Pathfinder 3 Shooting Star Experiment in both ambient and vacuum conditions.
The structure was suspended with free-free boundary conditions and excited using an
electromagnetic shaker attached to the support plate. In order to avoid mass loading of the
structure, a laser vibrometer was used to capture the dynamics. It was found that the natural
frequencies, damping and mode shapes significantly change between ambient and vacuum
conditions. As one would expect the damping of the structure decreased in vacuum conditions.
Slade et al. (2001) state that the results of this study point to a need to conduct vacuum modal
surveys of inflatable articles intended for space application in order to ensure that on-orbit
behavior will be well-replicated in the test environment. Following these tests Leigh et al. (2001)
used the results of the tests performed at ambient conditions to determine the effectiveness of
finite element software to model the inflatable structure. The finite element code
MSC/NASTRAN was used to develop a model of the system for two cases; one using beam
elements and the second using shell elements. The results of the model do not correlate well, but
the authors state that the model shows potential to correlate well, if enough detail is observed
during its creation.
Other recent studies (Agnes and Rogers, 2000) to characterize the dynamics of inflatable
structures have shown to be difficult due to there extremely lightweight, flexible and high
damping properties. The flexible nature of inflatable objects causes point excitation to result in
only local deformations rather than exciting the global modes necessary for model verification
and parameter identification. To overcome these issues Griffith and Main (2000) used a modified
impact hammer to excite the global modes of the structure while avoiding local excitation. The
tip of the impact hammer was enlarged such that sufficient energy was input to the system to
excite the global modes. They found that increasing the internal pressure of the torus from 5.52

8
kPag to 6.89 kPag resulted in significantly less damping and improved the coherence
considerably. During the modal testing the authors used a roving accelerometer technique that
causes differences in the frequency response at each location of the accelerometer due to the
movement of accelerometer’s mass around the system. This is an issue when dealing with
inflatable structures due to their extreme lightweight. One improvement mentioned by the
authors would be to use non-contacting methods of measurements such as a laser vibrometer or
photogrammetry and videogrammetry. A still easier remedy to this problem would be to use a
roving hammer technique, this means that the accelerometer location is stationary and the impact
location is changed.
Smart Materials for Dynamic Testing and Control of Inflatable Satellites
Due to the advances in piezoelectric materials since the early 1990’s smart materials have
become a viable answer to the problems encounter during early testing of inflatable structures.
Some of the issues that were faced with the previously mentioned research into the dynamic
testing of inflatable structures are as follows. Slade et al. (2000) were unable to obtain consistent
results with the laser vibrometer due to a combination of influences of the free-free suspension
system and shaker imposed constraints including mass loading, added damping and non-global
excitation. Griffith and Main (2000) also experienced difficulties including extremely low
coherence and a lack of energy input to the higher frequencies because of the flexible nature of
the inflated object. To overcome these issues many researches have begun to look toward
piezoelectric materials for dynamic testing of inflatable structures.
Agnes and Rogers (2000) attempted to perform a modal test on an inflatable children’s
swimming pool suspended vertically in a square frame. The torus was excited using both an
electromagnetic shaker and Polyvinylidene fluoride (PVDF) patch while the response of the
structure was measured using a laser vibrometer at points around the perimeter of the face of the
torus. The authors used a multivariate mode indicator function (MMIF) to identify the resonant
frequencies. However, further modal analysis was not performed due to significant nonlinear
behavior in the system and low excitation levels on the part of the PVDF patch. Although this
paper did not produce revolutionary results it, it did show that piezoelectric materials could be use
for excitation of inflatable structures.

9
Briand et al. (2000) also used PVDF patches to test the dynamics of an inflatable torus,
although the patches were used for sensing rather than excitation. The test fixture was a tire inner
tube and was excited using an electromagnetic shaker. The experimental setup was able produce
results with good coherence from 0-100 Hz. However, unlike the results found in Agnes and
Roger (2000), a modal analysis was capable of being performed. This was the case because
PVDF patches are ideal for sensing due to their low mass and stiffness, but they are not well
suited for actuation due to low piezoelectric coupling coefficients. The conclusions of the modal
test were then compared to a finite element model with favorable results. The authors also
mention the possibility of using shape memory films and fabrics to produce the actuation energy.
This research showed that smart materials, namely piezoelectrics were a definite choice for
sensing the dynamics of inflatable structures.
Park et al. (2001) used an electromagnetic shaker to excite an inflated tire inner tube with
both accelerometers and multiple PVDF patches located around the structure to effectively sense
the vibration at multiple locations during one excitation period. They found that the data
measured with PVDF film was consistent with that obtained from the accelerometer. Although,
the natural frequencies were almost identical for both methods, those obtained using the
accelerometers were slightly less as expected due to mass loading. However, the PVDF film
sensors offer several advantages when testing inflatable structures because they are lightweight
and extremely flexible allowing them to conform to the torodial shell without adding additional
mass or stiffness to the system. In addition to testing the torus with an electromagnetic shaker
they used both a bimorph PVDF patch and a macro-fiber composite (MFC) to excite the torus. It
was found that the MFC and PVDF patches were ineffective at exciting the lower frequencies but
effective at higher frequencies, this was attributed to imperfect bonding caused by the use of
double sided tape to secure the patches. The PVDF patch used in Agnes and Rogers (2000) was
ineffective while this patch worked well because Park et al. constructed a multilayer bimorph
PVDF actuator that produced far more strain energy than the unimorph patch. One definite
advantage of the smart material actuators over the shaker input was found; they greatly reduced
interference with the suspension modes of the free-free torus. The last portion of this work was to
implement a Positive Position Feedback (PPF) control system using the MFC and PVDF patches
to reduce the vibration of the 3rd and 4th out of plane bending modes. The control system resulted
in approximately 50% vibration reduction, but it is speculated that more attenuation could be
achieved if the actuators were permanently bonded to the structure.

10
Following the work previously mentioned, Park et al. (2002) performed a modal analysis on a
torus constructed of Kapton with an aspect ratio that more closely matched that of the actual
satellites intended for space. The torus was excited with both an electromagnetic shaker and an
MFC actuator. The sensing was performed using both an accelerometer and a PVDF film to
compare the performance of each. It was found that the MFC could globally excite the inflatable
torus and produced better results than the shaker input due to less interference with the
suspension modes of the free-free torus. It was also shown that the PVDF patch provides
measurements of comparable quality to that of the accelerometer. The modal analysis accurately
found the first four out of plane bending mode shapes as well as the first two in plane bending
mode shapes. Ruggiero et al. (2002) used the same test structure to perform a modal analysis
using multiple input and multiple output (MIMO) techniques in addition to developing a PPF
control system to attenuate vibration in the first mode. The MIMO testing techniques are
necessary because multiple actuators would be needed to globally excite the immense structures
intended for space. This work showed that the MIMO testes produce results identical to those
obtained earlier using one MFC for excitation. The MFC was also used to control the first mode
and was shown to reduce the vibration by 70%. However, the authors of this study did not realize
that the controller being used in this case was not applying global vibration reduction but rather
shifting the modes around the symmetric structure of the torus. The shortcomings of the control
system developed by Ruggiero et al. (2002) were identified and improved by Sodano et al.
(2004). Sodano et al. (2004) realized that due to the symmetric nature of the torus repeated
modes were present that cause the use of a signal actuator to suppress one mode while exciting
the other. Therefore, a PPF controller with multiple sensors and actuators was developed and
applied to the torus to correct the issue. The control system was shown effectively suppress the
first mode by approximately 75%, but due to repeated modes and non collocated sensors and
actuators, the higher modes were unable to be controlled. The authors describe a self-sensing
system that would allow the sensors and actuators to be perfectly collocated, but were unable to
implement the system due to the possible instabilities in the analog self-sensing circuit that would
cause surge voltages to be output to the control board, potentially damaging its circuitry.
While much headway has been made in the dynamic testing of inflatable structures, there is
still much to be learned. However, with the advances in piezoelectric actuators, materials,
controls algorithms, finite element programs, structures and computational power of computers,
the steps necessary to understand the dynamics of inflatable devices are becoming clear.

11
1.3.2 Dynamic Modeling, Testing and Control of Membranes
As described in the previous sections, the dynamics of the inflatable structure are particularly
difficult to test and control. While it is necessary that the global structure, i.e. the inflated
components, are dynamically well understood and can be controlled, the overall system will not
function if the membrane mirror or antenna is not dynamically stable. The dynamics of the
membrane pose a whole new realm of testing and control issues. The defining characteristic of a
membrane structure is that it cannot withstand an applied moment and is therefore extremely
flexible. The flexible nature of the structure makes global excitation, for either testing or control
purposes, extremely difficult. When this complexity is coupled with the need for the surface of
the membrane to remain almost perfectly flat in all operating conditions, the task of developing a
satellite that utilizes a large membrane surface is quite daunting. However, the research efforts
put forth in this field have allowed great strides to be made and this technology now appears to be
potentially feasible for optical applications in future space missions. As a note, in the following
section the terminology of an optical membrane also implies use as an antenna.
Theoretical Modeling of Membranes
The concept of utilizing thin membranes for space applications poses numerous complex
modeling issues. For many applications the desired shape of the membrane is parabolic.
However, to achieve this shape, the membrane is typically subjected to either an inflation or
vacuum pressure, often causing surface errors or spherical aberration. The surface aberration is
commonly referred to as a “W-profile error,” which is a measure of the deviation of the actual
surface from that of the desired configuration (Maker and Jenkins 1997). The errors that occur in
these materials can be corrected through control techniques that will be reviewed in a subsequent
section, but the key to any successful control scheme is a theoretical knowledge of the system at
hand. Föppl (1907) developed the equilibrium equation for a membrane plate that are
fundamentally modified von Kàrmàn plate equations (von Kàrmàn, 1910) with the bending
rigidity set to zero. However, in many applications a circular membrane is subjected to a uniform
pressure along its surface, which, as mentioned is a common method of providing a parabolic
shape to the membrane. The first investigation into the solution of a pressurized membrane was
performed by Hencky in 1915, who presented the power series solution to a homogeneous
isotropic linear elastic circular membrane subjected to a normal pressure; this problem became

12
know as Hencky’s problem. These equations saw little interest until the 1940’s when Stevens
(1944) performed an experimental analysis on a 20 in diameter, 0.012 in thick cellulose acetate
butyrate inflated circular membrane. Steven’s compared the membrane deflection results of
Hencky’s with his experiments and formulated an approximation to the shape of an initially flat
pressurized membrane. Over the next three decades Hencky’s problem was studied by various
researchers (Chien, 1948, Shaw and Perrone, 1954, Weil and Newmark, 1955, Cambell, 1956,
Dickey, 1967, Kao and Perrone, 1971, Kao and Perrone, 1972, Schmidt, 1974, Schmidt and
DaDeppo, 1974), however, these studies will not be discussed in this dissertation.
In recent years, modeling techniques for membrane structures have begun to see considerable
attention. Juang and Huang (1983) investigated the analytic solution to the problem of static
shape control using an electrostatically deformed membrane mirror. Their study used large
deformation membrane theory to derive the nonlinear partial differential equations that describe
the control forces necessary to achieve a desired final shape of the membrane. The paper also
presents two examples that illustrate the validity and application of the nonlinear equations of
motion to a membrane of revolution loaded symmetrically by electrostatic forces. Rather than
derive the equilibrium equations, Maker and Jenkins (1997) utilized an FEM program to
demonstrate that the deviation from the desired surface shape can be corrected through boundary
displacements. The results of the analysis show that a maximum deviation of 12.5% is present for
the case of no control and a little over 7% when boundary control is implemented at three
locations, this represents a reduction of 58%. The work of Maker and Jenkins (1997) was
continued by Jenkins et al. (1998), who provide additional FEM results regarding surface control
using boundary displacements. Furthermore a discussion on the relevant surface precision
measurements for an optical surface is provided. Their study showed that by displacing 3 points
on the rim of the membrane by a distance of 4.9 mm, the RMS surface area could be reduced
from 1.43 mm to 0.370 mm. This result is promising because Thomas and Veal (1984) suggest
that the RMS surface error of a membrane reflector should be with 1 mm if the reflector is used in
applications requiring frequencies of less than 15 GHz.
In the first of a series of four papers that develop analytic and FEM modeling techniques for
piezoelectric actuated membranes, Rodgers and Agnes (2002) begin their analysis with a one
dimensional structure, the laminated piezopolymer-actuated flexible beam. Their work provides
a complete development of the nonlinear equations of motion governing the one dimensional
slender membrane material using perturbation techniques. The static response of the beam to the

13
piezoelectric actuator causes a deflection of approximately one wavelength of visible light, which
is stated to agree with experiments presented by Wagner (2000). Furthermore, the deflection of
the beam when subjected to a pressure is presented before and after actuation of the piezoelectric
material. Following the static results, the dynamics of the flexible beam are modeled and the
results are presented. The dynamic solution of the beam shows that when one volt is applied to
the piezopolymer material a deflection of 2.5x10-9 m is achieved. Following the solution of the
one dimensional case, Rodger and Agnes (2002) derived the coupled nonlinear equation of
motion of a piezothermoelastic laminated circular membrane using perturbation techniques.
Using an axisymmetric approximation both the static and dynamic response of the membrane are
analyzed. The static results indicate that the PVDF piezoelectric laminate provide deflection
equivalent to several wavelengths of light. However, the solutions presented are stated to
represent the limit of the analytical approach.
To allow for more complicated membrane systems to be analyzed, Rodgers and Agnes (2002)
introduce the method of Integral Multiple Scales (MIMS) for solving dynamics systems that can
be represented in the Lagrangian Form. The manuscript first develops the integral multiple scales
method and uses it to determine the analytic solution of a beam string. Following the analytic
example, the finite element method is formulated using calculated linear and cubic shape
functions of a beam-string. Once the finite element model was constructed the static and dynamic
results were compared to those of the analytic model. It was found that the use of linear shape
functions caused a fair amount of error, but cubic shape functions were shown to provide high
accuracy of the static deflection. The finite element model was also shown to accurately predict
natural frequencies and the formulas necessary for including damping effects into the model were
provided. Subsequent to the development of the asymptotic finite elements using the MIMS for a
one dimensional structure, Rodgers and Agnes (2003) applied the formulation to the more
complicated two dimensional membrane with discontinuities caused by regions of piezoelectric
material. The method was shown to effectively model the complex interaction of the
piezoelectric and the membrane structure. The banded configuration of the piezoelectric material
was demonstrated to have the greatest effect on the Zernike modes 1, 5 and 13. Furthermore, the
results demonstrate that as the tension in the membrane is increased that the control authority of
the piezoelectric material decreases. Lastly, the forced response is calculated, revealing the
significantly increased dynamic response of the membrane, indicating that the piezoelectric
material may not be the most effective choice for static shape control but very effective for active
vibration control.

14
With the number of modeling techniques growing in the area of membrane theory for optical
and antenna applications, Greschik et al. (1998) published a study that compared the impact on
accuracy of several representative solution approximations on the analytical shape predictions for
both initially flat and curved membranes. The error generated from several different assumptions
and approximations was determined using AM (Axisymmetric Membrane), a highly accurate
numerical solution program that was verified using NASTRAN. This study found the following
result regarding the error caused by solution approximations; higher pressures equate to higher
error, for the linearization methods considered, the small angle approximation causes the most
significant error and ignoring the radial component of Hencky’s solution substantially degrades
the accuracy. Additionally, perturbations were made to the membrane thickness and temperature,
showing that model parameter uncertainties made more significant impact on results than
approximations, while temperature variation degraded the accuracy worse than thickness
variations. Furthermore it was determined that the shallower the parabolic shape, the greater the
error. Because Greschik et al. (1998) was interested in investigating the performance of these
methods at radio frequencies, de Blonk (2003) investigated the shape prediction error for the
higher frequencies required by optical membranes. de Blonk studied three different models, the
axisymmetric membrane shell, axisymmetric large deformation and linear axisymmetric large
deflection. The results showed that all three models performed at the optical level for a range of
non-dimensional parameters but all do not always perform at optical tolerances. These two
studies help define which of the numerous models will work best in a particular application.
Modeling Techniques have made significant progress over the last century and with the increased
computation power available in today’s computers the accuracy of the models will continue to
grow.
Dynamic Testing and Analysis of Membranes
Although the theoretical modeling of membrane structures has made significant progress, the
ability to validate the proposed models through experiments is not an easy task. Marker et al.
(1998) presented an experimental evaluation of the shape limit for a doubly curved membrane.
The test structure for this investigation was a 28 cm diameter, 125 µm thick polyimide film
subjected to a vacuum, causing a 4.47 m concave radius of curvature. Their study applied a
vacuum to the membrane at two locations separated by a ring; the central portion of the
membrane was the first vacuum section and served as the optical portion, while the second area

15
was at the outer ring. The effect of two vacuum areas was to pull the membrane down around the
separating ring, thus causing an increase in the membrane’s prestrain. The surface quality was
measured using a Hartman sensor that detects variance from a flat wave front. The results of the
experimental study showed that an increase in prestrain allowed the optical surface quality to be
improved. Furthermore, it was shown that as the pressure applied to the membrane is increased
the more spherical shaped the surface becomes.
One study performed by Jenkins and Kondareddy (1999) investigated the dynamics of
seamed membranes through both experiments and FEM Analysis, however due to the high
sensitivity to mass, the study did not produce the desired results. The tests were performed on a
1-mil thick membrane with a diameter of 6.82 in, with seams simulated by bonding 0.5 in strips
of the membrane material to the structure. To measure the dynamic response of the simulated
seamed membrane a laser Doppler vibrometer was used. Three experiments were performed to
identify the effect of seams on the membrane dynamics, the fist had no seam, the second had
seams at 90 degrees and the third had seems at 45 degrees. The results showed that the natural
frequency dropped significantly due to the addition of the membrane strips. The drop in resonant
frequency indicates that the strips caused mass loading and not additional stiffness as intended.
This result shows that the membrane strips did not correctly simulated the stiffness added by
actual seems, thus demonstrating the difficult testing nature of the membrane structure.
The Air Force Research Laboratories have performed extensive research into the testing and
improvement of optical membranes. One study performed by Rotgé et al. (2000) at the
membrane mirror laboratory, investigated two methods of improving the surface quality. The fist
method described in the paper was to develop more suitable membrane materials. The authors
describe a recently developed type of polyimide film called “CP-N.” The authors state that this
material, which has a surface flatness of 0.05 λ rms (where λ rms is the root mean square of the
wavelength of optical light), may be the key solution necessary to develop a functioning
membrane mirror. The material was tested by constructing a 28 cm diameter test bed and
measuring the surface flatness an optical quality. It was determined that once the membrane was
fixed the surface flatness was approximately 30 λ rms with a blur circle 14 mm in diameter. By
increasing the vacuum pressure the size of the blur was reduced from 14 mm down to 3 mm. The
second method used to improve the optical quality of the membrane was Real Time Holography
(RTH). The RTH method takes the optical image and processes it to improve the quality. Using
RTH the blur size was reduced from 6 mm down to 120 µm or approximately 1-2 λ rms. This
16
demonstrates the ability of RTH to correct for the surface error in a stretched membrane optical
surface. Data processing techniques such as RTH are important to membrane testing because
they allow for greatly decreased surface and structural tolerances.
Like the research performed at the Air Force Research Laboratories, Hiroaki and Yuma
(2001) studied a method to manufacture higher surface quality materials. The authors constructed
a 115 µm thick membrane out of plastic reinforced triaxial fabrics woven with aramid fiber and
Poly-Phenylene Benzobisoazole (PBO) fiber and stretched in inside of an inflated torus.
However, this study was interested in testing the material’s surface characteristics for use in
antenna applications, which have a surface tolerance far more relaxed than that of an optical
surface. The 1.5 m inflated torus used was shown to be capable of being very compactly
packaged in a cylindrical shape with a height of 380 mm and a diameter of 300 mm. Using a
scanning laser vibrometer their study found that after being packaged and deployed the surface
flatness was better than 0.1 mm rms when stretched with a tension of 28.9 N at 24 tensioning
points. Studies that demonstrate the packaging, deployment and antenna surface quality after
deployment are extremely important to the success of inflated devices. This research has
demonstrated all three important aspects of the inflated structure, as well as, developed a
membrane material that after being deployed from its packaging is well below the surface
tolerance required by antenna for space applications.
CSA Engineering has published a series of papers that investigate the dynamics of
membranes in both ambient and vacuum temperatures. In 2001, Flint and Glease (2001)
performed experiments and FEM analysis on a tensioned hexagonal membrane. The study
characterized the Young’s Modulus and loss factor over a range of frequencies from 10-80 Hz
and found Kapton’s stiffness to increase by 1.2% and the loss factor to increase by 10% over the
tested frequency range. Following these experiments dynamic tests were performed and the
results were compared to those calculated using the FEM program NASTRAN and were shown to
match well. Lastly this study investigated the addition of constrained layer damping treatments to
the membrane surface. Results from these experiments varied, in certain cases the damping was
actually decreased, while the best result showed the damping to increase from 1.5% to 5.2%,
however, the mass in this case was raised by over 4.5 times. In a subsequent study, Hall et al.
(2002) modeled and tested 2-mil Kapton membrane strips. The study found that FEM models
could accurately predict the response of the strip, however, particular attention to the boundary
conditions during testing was required to obtain good results.

17
Continuing CSA Engineering’s research, Bales et al. (2003) studied the effects of thermal
variations, hydroscopic changes and vacuum pressure on the preload tension and dynamic
response of a 2-mil thick Kapton strip. These experiments found some interesting results. It was
determined that the thermal effects of the membrane tension were hard to quantify due to the
thermal expansion and contraction of the metal test structure, but they did show that the tension
was highly dependent on the surrounding temperature. While the structure interfered with the
thermal experiments, the metal components of the structure did not have any hydroscopic
characteristics, allowing these tests to be accurately performed on only the membrane material.
During the experiments the relative humidity was varied from 35% up to 100% and back down to
35%. It was found that as the humidity increases, water is absorbed into the Kapton material
causing the material to expand and the tension to decrease, as the humidity decreases the water
evaporates out of the material causing the tension to increase significantly. The last experiment
performed looked at the changes in dynamic response as the pressure is reduced to vacuum. The
study found that the resonant frequencies shift dramatically from 44 Hz at atmospheric pressure
to 52 Hz at vacuum, representing a 20% increase. The increase in natural frequency occurs
because as the pressure decreases to vacuum, the water content of the Kapton specimen is
expelled causing the material to shrink and the tension to increase. Additionally, the damping is
significantly lower at vacuum pressure. In the most recent study, Flint et al. (2003)
experimentally tested the dynamics of a 0.5m and 1.0m diameter doubly curved mirror made
from 52 micron thick Kapton at atmospheric pressure, vacuum pressure and in a nitrogen
environment at several different pressures ranging from 100 torr to 690 torr. The experimental
results of the tests showed that the doubly curved membrane was very difficult to test and the
experimental configuration did not allow all of the modes to be excited. Although the results
were not definitive, it was shown that the dynamics of the ring were significantly changed at
vacuum and that hydroscopic effects did not present any noticeable change in the dynamic
response. Additionally, before testing rough calculations were made to predict the dynamic
response of the membrane, however, the estimated natural frequencies did not match the
measured data well.
The experimental tests performed by researchers at CSA Engineering used a laser vibrometer
to measure the dynamic response of the membrane structure. A second method of measuring the
dynamic response of an extremely flexible structure is the use of photogrammetry and
videogrammetry, which has been investigated thoroughly by researchers at the NASA Langley

18
Research Center. Perhaps the first in a series of publications on the topic was Pappa et al. (2001),
which investigated the ability to use consumer digital cameras for photogrammety in the analysis
of a 5m inflated space antenna. The work presents a basic introduction into photogrammetry and
provides an eight step formula to generate the static shape of the antenna surface. The eight steps
are: 1) calibrate the cameras, 2) plan the measurements, 3) take the photographs, 4) import the
photographs into analysis software, 5) mark the target location in the software, 6) identify the
same points in each cameras frame, 7) process the data, and 8) export 3D coordinates to a CAD
program. Using the above steps, a single picture from four 2.1 megapixel digital cameras and
500 retro-reflective points mounted to the structure, the authors were able to measure the static
shape of the structure to within 0.02 inches in-plane and 0.05 inches out-of-plane. In a later
study, Pappa et al. (2002) discuss a more advanced procedure for determining both the static
shape and dynamic response of ultra flexible structures. Seven successful test specimens are
discussed and sophisticated cameras and dot projectors are used. To compliment these studies,
Dharamsi et al. (2002) compared the photogrammety method with the capacitance sensor, a
proven method for measuring the characteristics of a membrane. Their study found that the
accuracy of both methods matched astonishingly well, the equipment needed to perform
photogrammerty cost about one third of the price of a capacitance measurement system and the
time required to measure and process the data was a fraction of that needed for capacitance
systems. However, when using retro-reflective targets and white-light dot projection techniques
it can be difficult to provide enough data points for the photogrammertry system to provide a
detailed account of reflective and transparent membranes. To account for such limitations, Pappa
et al. (2003) discuss the laser-induced fluorescence method of dot projection. This method uses
polymer materials that have been manufactured with a small amount of dye in them such that
when excited by a laser light source the dye absorbs a fraction of the laser energy and
consequently fluoresces at a longer wavelength. This method provides a means of projecting a
high density pattern on the surface of materials that with other techniques would require
significant exposure times, eliminating the ability to perform dynamic testing. The method of
laser-induced florescence videogrammetry was compared to laser vibrometer by Blandio et al.
(2003). However, it was found that the laser vibrometer was superior in all aspects other than
cost, which is significantly greater. During testing the vidiogrammetry technique identified
modes that were not present and could only be used below 5 Hz because of camera limitations.
For thin membranes to be used in space, ground testing techniques are of utmost importance.
The publications presented in this section are only a fraction of the many investigations into

19
experimental studies and techniques for ultra lightweight and ultra flexible structures. With the
advances being made in this area and the collection of research papers, ground testing of these
structures is now a feasible goal.
Control Methods for Optical Membranes
After a structure is thoroughly understood through modeling and experimental testing control
schemes can be developed to improve the systems performance. The idea to develop an adaptive
membrane for use as an optical surface is not a new concept and has been looked at by numerous
research groups. In 1977, Grosso and Yellin tested an adaptive optical membrane and presented
the basic design equations to determine the membrane’s optical performance. The test specimens
were 50 mm diameter titanium and nickel membranes of various thicknesses and the adaptive
system was constructed using 53 individual hexagonal electrostatic actuators. It was found that
one actuator located a distance of 50-100 µm away from the membrane could generate a typical
deflection of one half a wave with less than 100 volts applied and a deflection of several waves
when numerous actuator were used. The experiments performed, investigated the fundamental
frequency of the each sample as a function of pressure and it stability over time as well as the
deflection of the membrane when actuated. It was found through the experimental results that the
design equations provided a very accurate prediction of the systems performance.
During the late 1970’s the idea of constructing an adaptive membrane optical surface saw its
first patent by Perkins and Rohringer (1978). The patent was issued for an adaptive optical
membrane that utilized multiple electrostatic actuators to both statically deflect and dynamically
control the surface of the membrane for optimal performance. It is stated that all other work prior
to this utilized only a single electrode to statically deform the membrane. Perkins and Rohringer
(1978) also discuss two methods of sensing the optical quality of the membrane surface. The first
method uses a laser range finder or a multipoint interferometer to determine the position of the
membrane, and then correct it using closed loop feedback control. The second device discussed
is an optical sensor that is placed at the focal plane of the membrane mirror and then supplied to a
processor that can detect the deviation from the desired optical quality of a portion of the mirror
allowing feedback control to be applied to that area. More detail on optical sensors of this kind is
discussed by Muller and Andrew (1974).

20
Research into membranes for optical surfaces was a small field yet continued to grow into the
1980’s and early 1990’s. Like Grosso and Yellin (1977), electrostatic actuators were used by
Claflin and Bareket (1986) to generate shape functions on the surface of the membrane mirror.
Their study investigates an approximate analytic solution of Possion’s equation that allows the
determination of the influence functions for a circular electrostatic mirror. With the influence
functions known, a fitting procedure can then be used to obtain the optimal voltage setting for
each electrostatic actuator such that the desired shape can be reproduced on the membrane
surface. The process is demonstrated on a circular membrane mirror developed by Merkle et al.
(1981) that utilized 109 electrostatic actuators and is shown to be capable of reproducing Zernike
Polynomials up to degree six with good accuracy.
Takami and Iye (1994) proposed and constructed an adaptive membrane mirror for the
Cassegrain adaptive optics of SUBARU, an 8 m telescope at Mauna Kea in Japan. For the
SUBARU project two types of adaptive mirrors were investigated. The first was a bimorph
mirror made of two plates of piezoelectric material linked together and covered by a thin silicone
shell that acts as the optical surface. The surface curvature of the mirror is modified by applying
a voltage to both sides and utilizing the piezoelectric effect (Jagourel et al. 1990). However, this
configuration was not focused on because of the complexity of polishing the bimorph mirror.
The second concept used a mirror made of a 2 µm thick aluminum coated nitrocellulose
membrane with a diameter of 50.8 mm and an effective area of 25 mm diameter. The aluminum
surface of the mirror was used such that it was reflective as well as conductive, thus acting as a
bias voltage electrode. Actuation of the mirror was accomplished through the use of 25
electrodes located 530 µm from the surface. The drawback of the membrane mirror was that for
operation of the control system, a vacuum chamber was required to avoid discharge of the
electrodes. Through experiments it was determined that the optical surface quality of the
membrane was 0.03 λ rms inside the 25 mm effective area and was present up to the near infrared
region (tests were limited to the near infrared region because of the glass window used on the
vacuum chamber). During testing of the membrane, it was found that when the membrane was
operated at vacuum pressure the damping was very low causing large resonant peaks beginning at
1.6 kHz, thus limiting the operation of the mirror. To correct this problem it was found that if the
pressure was increased to 5 Torr the damping was significantly improved and electrical discharge
was avoided.

21
With the improvements in materials, computers, manufacturing techniques and the successful
launch and deployment of an inflated satellite in 1996, the late 1990’s saw a surge of research
into the area of optical membranes. During this time period a number of interesting alternative
control schemes were developed. One such alternative approach to control the surface precision
of optical membranes was proposed by Divoux et al. (1998), who developed the concept of using
a membrane coated with a magnetic layer that could be actuated by numerous micro-coils. The
study used three finite element packages to investigate the effect of both 2 mm and 6 mm coils on
the 30 mm membrane. A prototype of the 25micro-coil array was constructed with 6 mm
diameter and 3 µm thick aluminum conductors. However it was found that the resistance of the
aluminum coils was too high and excessive heating was present. To overcome this issue Cugat et
al. (2000) used a LIGA (German acronym meaning, lithography, electroplating and molding) to
construct a hexagonal array of 19 coils with a diameter of 6 mm and 80 µm thick electrodes.
Using this micro-coil array, experiments were performed on a membrane with 19 samarium
cobalt (SmCo) permanent magnets glued to the surface resulting in a static deflection of 15 µm,
the system was also able to dynamically perform up to 200Hz.
Another approach to non-contact shape control of membrane mirrors was performed by Main
et al. (1999) using an electron gun to excite a piezoelectric patch. By applying an electric
potential to one side of the piezoelectric material and firing the electron gun at the other side, a
surface charge is developed that can be varied with the intensity of the electron beam. Using this
technique, the strain of the piezoelectric material can be controlled while alleviating the need for
an electrode pattern and the limitations that are imposed by them. The study first tests a
piezoceramic plate to determine the excitation behavior of the electron beam and to understand
the relationship between applied field and electron guns strength. Next a bimorph PVDF
cantilever mirror was tested to determine the deflection that could be induced in the piezoelectric
polymer. The results found that using this technique the tip of a 10cm long beam could be
deflected 4mm. It was also shown that discrete areas of the beam could be excited using the
electron beam.
Rather that using an electron gun to excite regions of a PVDF membrane, Wagner et al.
(2000) studied the ability to bond a layer of PVDF film to a membrane and apply active control to
select regions with various electrode patterns. The authors provide a very detailed account for the
construction of a 125 µm thick UPILEX membrane (an average surface roughness of 3 nm) along
with the procedure used to etch an electrode pattern onto 52 µm thick PVDF and the methods

22
used to bond it to the membrane surface. Four mirrors were constructed to investigate the surface
quality of the membrane, the first had no PVDF material bonded, the second was completely
covered by PVDF material, the third had a square region coated and the fourth had four square
PVDF patterns. It was found that the membrane with no PVDF bonded to it optically performed
the best with a 4.5 µm deviation in surface flatness. The other three membranes with PVDF
material attached were excited with varying voltages to determine the effect of the PVDF control
patches. It was shown that motion of 32 µm was achieved with excitation of the PVDF patch.
This study illustrated that the PVDF material could be bonded to the surface of the membrane and
potentially be used for active control of the optical surface. However, because of the bonding
condition between the PVDF and the membrane the optics were degraded rather than improved,
once again pointing out the sensitive testing nature the membrane.
A follow up study to Wagner et al. (2000) was performed by Sobers et al. (2003), who
constructed two PVDF membrane mirrors that had different etched electrode patterns in order to
control regions of the piezoelectric material. Once the membrane mirrors were fabricated, the
surface flatness was measured and shown to be 1.2λ RMS and 0.63 λ RMS for the first and
second mirrors, respectively. Using the PVDF layer control voltages were applied to selected
actuators and the surface flatness was shown to be reduced to 0.87λ RMS and 0.27 λ RMS, for
the first and second mirrors, respectively. Additionally, the piezoelectric actuators were used to
deform the membrane into Zernike polynomials and showed that the separate electrode regions
only deformed the actuated regions indicating that high-order surface control was achieved. The
results indicate that the use of PVDF film for control of optical membranes can provide
corrections to surface flaws and may be usable in space in the near future.
Solter et al. (2003) also used smart materials to actively suppress the vibrations of a
membrane, however, their study used a piezoelectric stack actuator and two macro-fiber
composite patches to actively adjust the in plane tension and out of plane displacement from the
boundary of the membrane. The structure tested was a rigidized hexapod with a 1mil thick
Kapton membrane tensioned in the center by 12 cables. For this study one of the cables was
replaced by the piezoelectric actuator. The stack actuator was responsible for adjusting the
tension of the active cable and the macro-fiber composite was used to deflect the cable out of
plane. Using this actuation system a lead-lag compensator was build to reject the disturbance of
the membrane above 15Hz. The system was shown to be effective in reducing the magnitude of
the response at the resonant peaks, even with limited tension control from the piezoelectric stack.
23
The literature that has been presented in the area of membrane modeling, testing and control,
clearly shows the complex nature of the extremely flexible structure. While significant advances
have been made is this field, the use of membranes in space for optical or antenna purposes is a
goal that is not yet attainable. However, with the renewed interest in ultra large, ultra lightweight
space devices, there has been a surge of research into membranes. These increased research
efforts, will surly provide the advances necessary to develop a membrane system capable of space
missions.
1.3.3 Eddy Current Damping
This dissertation will investigate the ability to use the eddy currents generated by magnetic
fields to suppress the vibration of the ultra flexible devices intended for space. The eddy current
phenomenon is caused when a conductive material experiences a time varying magnetic field.
This time varying magnetic field can either can be induced either by movement of the conductor
in the field or by changing the strength or position of the source of the magnetic field. The
generated eddy currents circulate such that they generate a magnetic field of their own, however
the field generated is of opposite polarity as the change in flux, causing a repulsive force.
However, due to the electrical resistance of the metal, the induced currents will dissipated into
heat at the rate of I2R and the force will disappear. In the case of a dynamic system, the
conductive metal is continuously moving in the magnetic field and experiences a continuous
change in flux that induces an emf, allowing the induced currents to regenerate and in turn
produce a repulsive force that is proportional to the velocity of the conductive metal. This
process causes the eddy currents to function like a viscous damper and dissipate energy forcing
the vibrations to die out faster.
The generated eddy currents can be potentially used for many interesting dynamic
applications. In the following section, previous studies using eddy currents for dynamics systems
will be presented. The concept of using eddy currents for damping purposes has been known for
a considerable time, with manuscripts dating to the late 1800’s, therefore, the history of the eddy
current damper will not be presented and only work from the past few decades will be reviewed.
First, eddy current braking systems will be discussed; this is the most common and well
developed application of eddy currents, subsequently the use of eddy currents for the suppression

24
of rotor vibration will be detailed, and lastly research into eddy currents used to damp structural
vibrations will be reviewed.
Eddy Current Braking
Eddy current breaking typically uses the rotational movement of a conductive medium
between two oppositely poled magnets to induce an emf in the material. A schematic showing
this concept is provided in Figure 1.3. By configuring the two oppositely poled magnets as
shown in Figure 1.3, the magnetic field is concentrated in the gap between the two magnet
surfaces, therefore causing the conductive material passing through this region to experience the
maximum change in magnetic flux and thus induce the greatest eddy currents and damping force.
For this reason, the arrangement of the magnets and conductor’s motion as shown in Figure 1.3
provides the optimal eddy current damping system. For magnetic breaking purposes, this
configuration fits the system well and has been investigated by numerous researchers. One early
study into eddy current breaking was performed by Davis and Reitz (1971), who examined the
forces induced on a magnet moving over the surface of both a semi-infinite and a finite
conducting medium. Their research utilizes an image concept proposed by Sommerfeld (1889) to
allow the induced eddy currents in a finite conducting disk to be calculated. The results provide
the Green’s functions that were unable to be calculated by Sommerfeld (1889) and propose an
approximate solution to the case of a finite dimension conducting sheet of finite conductivity,
which causes difficulties in the solution due to the decay in eddy current density from joule
heating. Later, Schieber (1974) analytically predicted the braking torque on a finite rotating
conductive sheet and performed experiments to identify the accuracy of the modeling techniques.
The results showed that the model and the experiments were in good agreement, however, it is
speculated that the use of an over simplified magnetic flux density over the magnet’s projected
pole was responsible for degraded results. Additionally, the study used the experimental setup
and model to determine the optimal radial placement of the magnet and found it to be in
agreement with results presented in previous research, thus indicating the functionality of the
experimental setup and accuracy of the model. Subsequent to this study Schieber continued his
research in eddy current breaking and published a paper in 1975 that analytically found the
optimal size of a rectangular electromagnet for eddy current braking. However, the braking force
was not applied to a rotating disk but rather to an infinitely large plate and an infinitely long beam
moving between the two magnets. His study found that the optimal ratio of the length to the

25
width (where the length is in the direction of motion) is in the range of 0.34-0.44 for the case of
an infinitely long beam and approximately 0.5 for an infinitely large plate.
Figure 1.3: Schematic of conductive material passing through a magnetic field and the generation
of eddy currents.
As time progressed into the mid and late 1980’s the ability to solve the complex mathematical
problems defining the interaction between the magnetic flux and structure was facilitated by the
advancements in computers. Additionally, the strength of permanent magnets became
increasingly larger, making the eddy current breaking systems more effective, smaller and lower
in weight, thus causing the system to be compatible with smaller machines. These advances
allowed the use of eddy currents for braking of dynamic systems to increase in popularity and
receive more attention. Nagaya et al. (1984) investigated the eddy current damping force induced
on a conducting plate of arbitrary finite size moving with a velocity parallel to the face of a
cylindrical magnet. To account for the boundary conditions of the conducting plate, the Fourier
expansion collocation method was used, which provides no restrictions on the conductor shape.
Additionally, experimental tests were performed using a pendulum with various shaped
conducting plates. The damping ratio could be calculated by displacing the pendulum a small
amount then releasing it and applying the log decrement to the measured settling response. Using
this experimental setup the model was numerically solved and shown to be in good agreement
with the experiments. To allow for an analytical solution, the authors make the assumption that
the magnetic fields are made up of small narrow circular bands of constant intensity, thus the
26
exact magnetic density over the whole surface of the conductors with a complicated shape could
not be considered. They state that due to this assumption, the model is only accurate for
conductors of which the area is about ten times the cross sectional area of the magnet.
Furthermore, the authors assume that the eddy currents generated through the thickness of the
conductor are zero because of the conductor’s small thickness. However, through experiments it
was found that this assumption is only valid for conductors with a thickness under of 5 mm.
Wiederick et al. (1987) proposed a simple theory for the magnetic braking force induced by
eddy currents in a thin rotating conductive disk passing through the poles of an electromagnet.
Their model found the damping force to be linearly related to the velocity, conductivity and air
gap, but quadratically dependent on the magnetic flux. The proposed model does not consider the
effects of the edges of the conducting plate and while the paper provides an experimental study, it
does not validate the accuracy of the model well. Additionally, when formulating the model the
authors made two assumptions; that the infinite disk is moving linearly rather than rotating and
the eddy current density within the rectangular “footprint” of the electromagnet is uniform and
zero elsewhere. Subsequent to the publication of Wiederick et al. (1987), Heald (1988) took the
model proposed by Wiederick et al. (1987) and formulated expressions that alleviated the need to
assume a constant eddy current density in the “footprint” of the electromagnet and zero
elsewhere. The results of the improved model were compared to those found by Wiederick et al.
(1987) and were shown to increase the accuracy from 96.3% to 99.4%.
Rather than study the effect of eddy currents on a rotating system, Cadwell (1995)
investigated the breaking force exerted on an aluminum plate as it passes between the poles of a
horseshoe electromagnet. A simple model of the system was developed that leaves the length of
the eddy currents path as an unknown parameter, which is fit using the experimentally obtained
results. By adjusting the length of the eddy current, the damping force induced on the aluminum
plate can be varied. Due to the use of a fitting parameter, the true accuracy of the model is not
presented in the authors results. Experiments were performed by sliding a cart with a vertical
aluminum plate attached down an air track. The position, velocity and acceleration of the cart
were measured to determine the damping force applied to the cart as it passed between the poles
of the electromagnet. After performing the experiments the authors found the length of the eddy
current path to be slightly less than the vertical height of the effective magnetic field.
Additionally, it is stated that the magnitude of the eddy current was over 1000 Amps, but the

27
resistance of the path taken is only 3.5x10-6 Ohms, thus resulting in a power dissipation of 12
watts.
As the modeling techniques for eddy current braking processes improved in accuracy, control
techniques could be used to adjust the braking force of the system. One such controller was
designed an implemented by Simeu and Georges (1996) to actively vary the intensity of the
electromagnet and thus control the speed on the rotating system. This study uses the idea
discussed by Wouterse (1991) that the eddy current brake’s behavior falls in one of three regimes.
The low speed region when the magnetic induction caused by the eddy current pattern is
negligible compared to the original induction and the air gap magnetic induction is then slightly
less than that generated at zero speed, the critical speed region is the speed zone at which the
maximum drag force is exerted and the induction caused by the eddy current pattern is no longer
negligible compared with the zero speed induction, and lastly the high speed region, were the
mean magnetic induction in the air gap tends to decrease further and as the speed increases to
infinity the original magnetic induction will be completely canceled out by the induced eddy
currents. Using the first of the three different behavior regimes (low speed), static and dynamic
feedback compensator schemes were proposed and implemented to control the speed of the
rotating disk in the presence of an unknown varying braking resistance torque. The results
showed that by varying the eddy current braking force the speed of the rotating wheel could
accurately follow a reference speed even in the presence of a disturbance torque. Additionally, it
was demonstrated that both control schemes functioned well, but the dynamic feedback controller
was more effective than the static.
Lee and Park (1999) also investigated the design of an eddy current brake controller.
However, their system was not intended to maintain a fixed speed, but to minimize the stopping
time. The authors suggest that for the control system to be applicable to an automobile braking
system, it should have the ability to apply a braking force that is dependent on different road
conditions. Therefore, a sliding mode controller was designed to allow the maximum braking
force to be adjusted depending on the road condition. After modeling the eddy current braking
system, the control scheme was simulated. The results of the simulation showed that the braking
system performed very well in the high speed region, but the eddy current damping force is
proportional to velocity, so as the speed decreases the current applied to the electromagnet must
be increased. Once the current was raised to the saturation level of the electromagnet, the braking
performance fell off quickly. However, the authors state that the average deceleration before

28
saturating the electromagnet was 0.8 g, which is higher than the 0.5 g value suggested by the
National Association of Australian State Road Authority. The simulation was then compared to
experiments that measured the stopping time of a rotating conductive disk. It was shown that the
laboratory simulation and model matched very well. In the high speed range, the performance of
the eddy current braking system was shown to be superior to the hydraulic brakes typically used
in automobiles because of a fast response time and due to their non-contact nature, they alleviate
the need for regular maintenance. This paper shows that in the high speed region the eddy current
baking system is feasible for use in an automobile, however, it would be necessary to have a
hydraulic system in the low speed region.
More recently, Lee and Park (2001a, 2002b and 2002) developed a model for an eddy current
braking system that allows for an analytic solution to the problem. The model allows for one or
more separate magnets to apply a magnetic field to the rotating conductor. The electric field
intensity was first computed then the concept of the mirror image was introduced to account for
the edge effects caused by a finite radius of the rotating disk. The image method works by taking
the predicted eddy current density and rotating it about the edge of the conductor to create an
imaginary eddy current density that is then subtracted from the originally predicted density to
arrive at a net eddy current density. The authors use a lumped formulation of the radial
component of the eddy current density in the pole projection area and neglect the tangential
component for the net eddy current density. It is stated that the tangential component is expected
to be smaller than the radial component and therefore only the radial component is included for
convenience. To obtain the expression for the net eddy current, the radial component of the eddy
current density was numerically integrated. Additionally, the magnetic Reynolds number (the
ratio of induced magnetic flux to the applied magnetic flux) was used with the expression of the
net magnetic flux density assumed to be an exponential function. The applied braking force and
torque was then calculated and the model was compared to experimental results. It was found
that the model compared very well to the experimental results, with some discrepancy occurring
when multiple magnetic sources were placed in close proximity. The errors are believed to be
caused by calculating the total net magnetic eddy current in one pole projection area without
including the effects on the magnetic Reynolds number from other pole projection areas.

29
Magnetic Damping of Rotor Vibration
A second application of eddy current damping with rotational systems is the suppression of
lateral vibrations of rotor shafts. A major source of rotating equipment failure occurs due to
slight imbalances in the rotor causing self excitation. The magnets in the eddy current dampers
used for the suppression of rotational vibrations are configured in the same manner as those used
in magnetic braking applications. Gunter et al. (1983) investigated the design of an eddy current
damping system for the cryogenic pumps used to deliver the liquid fuel to the main engines of the
space shuttle. These pumps are susceptible to subsynchronous whirl, which can be extremely
destructive and has been responsible for bearing failures and severe rubs in the seals, resulting in
premature engine shutdowns and limited operation of the turbo pumps. The authors used the idea
that at the very low operating temperature of the cryogenic pumps the resistively of the conductor
is decreased allowing larger damping forces to be generated. The damping concept was modeled
using a rough finite element code and the damper’s performance was estimated. The authors state
that the damping generated by the system was sufficient to help suppress the rotor vibration,
however results presented are hard to decipher.
Like Gunter et al. (1983), Cunningham (1986) studied the use of eddy current dampers to
suppress the lateral vibration experienced by the cryogenic turbomachinery use in space shuttles.
Three magnet/conductor combinations were tested on a rotor operated between 800 and 10,000
rpm with the damping mechanism completely immured in liquid Nitrogen. The experimental
setup was constructed and tests were performed to determine the damper’s performance. Using
three different sized magnets it was shown in the best case that the damping coefficient could be
increased from 70 to 500 Nsec/m in the X-direction and from 110 to 320 Nsec/m in the Y-
direction. The increase in damping coefficient was also calculated using theoretical analysis to
provide an average accuracy of within 28.7% in the X-direction and 10.7% in the Y-direction.
Frederick and Darlow (1994) looked at using an eddy current damper to replace the coulomb
or squeeze film dampers typically used in rotating machinery, whose damping properties
typically change with temperature and cause additional torque loading and wear. The damping
system consisted of a horseshoe electromagnet that had a conductive disk rotating between the
magnetic poles. The study was purely experimental and showed that the peak to peak response
was reduced in the X-direction by 15.6% and in the Y-direction by 27.5%. While the results of
the experiments are feasible, the authors state that the damper does not cause any rotational

30
loading. This comment seems to be completely incorrect because the configuration of the
damping system does not differ from a magnetic braking system at all, and therefore must
produce a drag force on the rotation of the disk.
Kligerman et al. (1998a, 1998b) and Klingerman and Gottlied (1998) published a series of
papers investigating the instability in rotor dynamics caused by the use of electromagnetic eddy
current dampers. The first study of the series (Kligerman et al. (1998a)) theoretically and
experimentally showed that eddy current dampers are not effective for use in rotating systems that
are operating in the supercritical range because the dampers can induce unstable operation.
However, it is stated that the eddy current damper does form an effective vibration reduction
mechanism for subcritical operation. The authors state that the instability is caused by the
rotation of the conductive disk in the magnetic field and that if the rotation of the disk can be
eliminated the damper would function throughout all operating conditions. To validate this
statement, an experiment was performed where the rotating disk was detached from the shaft and
mounted to a bearing, thus allowing the disk to spin freely. Due to the eddy current braking
effect, the disk’s rotation was almost completely eliminated allowing the authors prediction to be
tested. The test results showed that indeed the rotation of the conductor between the magnets was
responsible for the destabilizing effect and that the damper’s effectiveness improved with an
increase in current applied to the electromagnet. The stability of the shaft with a freely rotating
conductor was evident through the supercritical range.
Klingerman et al. (1998b) continued his research into rotating systems with eddy current
dampers by studying the systems stability with a non-linear cubic restoring force at the shaft
supports. Through a numerical analysis it was determined that the rotating system goes unstable
via a Hopf bifurcation when a specific supercritical angular velocity is reached. The frequency
threshold for instability is provided and is related to the magnetic damping coefficient, the system
damping coefficient and the natural frequency of the shaft. The analysis also provides a closed
form solution for the radius of the limit cycle. Furthermore, the study found that in low speed
operation the forced unbalanced response consists of periodic vibration corresponding to the
systems rotational frequency, but high speed operation was shown to be governed by coexisting
quasiperiodic solutions. Later, Klingerman and Gottlieb (1998) determined that the influence of
nonlinear damping is negligible near the stability threshold.

31
The use of an active control system to suppress the lateral vibration of a rotating system was
studied by Fung et al. (2002). A rotating shaft with circular disks was analyzed using the
Timoshenko-beam model and Euler-beam model to determine the effectiveness of three control
algorithms; quadratic, nonlinear and optimal feedback, for vibration suppression of the shaft. It
was found that nonlinear feedback control provided the best settling time and that optimal
feedback control generated the smoothest control current input. For the system studied, it was
determined that the eddy current damper could be used to suppress the flexible and shear
vibration simultaneously and that system remained asymptotically stable.
Eddy Current Damping of Structural Vibrations
While the single most prominent application of eddy currents for suppressing dynamic
motion has come in the form of magnetic braking, numerous studies have been performed that
utilize eddy current damping for the suppression of vibrations in a range of applications. The
following section will not concentrate on a single application, but will detail some of the many
research applications that have been performed in the area of magnetic damping.
Karnopp (1989) introduced the idea that a linear electrodynamic motor consisting of coils of
copper wire and permanent magnets could be used as an electromechanical damper for vehicle
suspension systems. The study presented the ability to use a moving coil and a moving magnet
actuator as the damping mechanism and employed some rough calculations to identify the system
performance; however no experiments were performed to validate the calculations. The author
showed that his actuator could be much smaller and lighter than conventional actuators while still
providing effective damping in the frequency range typically encountered by road vehicle
suspension systems.
Kienholz et al. (1994) developed a tuned mass damper vibration absorber to suppress the
vibration of a solar sail array. The frequency range of interest was from 0.1-1.0 Hz, thus the
spring element of the system was required to have a very low stiffness and large stroke. Because
the stroke of the absorber was very large (8 in) and most dampers would add stiffness to the
structure, the choice of damping mechanism was difficult. The solution was the use of magnetic
dashpots that were constructed with two shallow horseshoe permanent magnets and a copper
conductor passing between the poles of the magnets as the mass of the vibration absorber moved.

32
The authors chose the damping ratio of the magnetic dashpot to minimize the occurrence of split-
mode behavior by maximizing the split-mode damping ratio. To facilitate the identification of
the damping ratio for each damper, the program AMPERES was used to generate the 3D
magnetic flux of the magnet using boundary element techniques. For the structure in question,
two tuned mass dampers were constructed for the two lowest modes of the structure. After
dynamic testing of the solar array it was found that in the two targeted modes (1st torsion at
0.153Hz and 1st out of plane bending of 0.222Hz) the damping was increased by 30 dB and 28 dB
respectively, while the higher frequency untargeted modes in the range of 0.4-0.8 Hz were
damped between 11-16 dB. These results indicate the high damping forces that can be achieved
using magnetic damping techniques.
In a later study, Kieholtz et al. (1996) once again investigated a magnetic damping system for
use in space. This study focuses on the development of a vibration isolation system to protect a
large optical instrument intended for the Hubble telescope from the harsh vibrations experienced
during shuttle launch that may damage the sensitive equipment. The isolation system uses eight
telescoping struts consisting of a titanium coil spring and a passive damper. The passive damping
system used in this application consisted of four permanent magnet rings and a conductive tube.
Two magnetic rings fit inside and two outside of the conductive tube allowing eddy currents to be
generated as the strut was extended and compressed. This particular type of damping system was
chosen because it did not require any liquid that could leak during operation, had low friction
(because of its non-contact nature no friction is present from the damper) and provided small
variation in damping over a fairly wide range of temperatures. Each strut was placed inside of
constant temperature chamber to determine the variation in effectiveness as the temperature was
varied. It was found that over the temperature range tested, the eddy current damper strut
performed inside the design limits, but the characteristic significantly varied with temperature. It
is expected that through the use of magnetic dampers the isolation system would have a
maintenance free life of 20 years.
Kobayashi and Aida (1993) also investigated the use of a vibration absorber that utilized a
passive eddy current damper. For their system a Houde damper, which consists of only a mass
and damping element was used. Because this vibration absorber does not have a spring it does
not have a natural frequency and thus does not require tuning to the structure. The paper
develops an analytic model of the damper that simulates the system as a concentrated mass and
linear dashpot. The Houde damper developed in this paper is intended to be placed on pipes in
33
industrial buildings to reduce the vibration and noise generated by them. Therefore, experiments
were performed on a 2.4 m pipe to determine the vibration suppression capabilities. It was found
that the first bending mode of the pipe was reduced linearly by a factor of eight to ten with
displacements ranging from 0.4-4 mm. Furthermore, the damping ratio of the pipe was increased
by 2%. The effectiveness of an eddy current damper for use in vibration isolation systems was
shown by Schmid and Varga (1992), who used eddy current dampers for high resolution and
nanotechnology devices such as a scanning tunneling microscope.
A series of authors studied the effect of a conductive beam or plate subjected to a strong magnetic
field. Tani et al. (1990) numerically determined the dynamic behavior of thin conductive plates
with a crack under both impulsive and continuous magnetic fields generated by an electromagnet
positioned a small distance perpendicular to the surface of the plate. The study showed that when
the impulsive magnetic field is applied to the structure, it begins to vibrate and through
experiments the finite element code was shown to produce results with fair agreement. Morisue
(1990) and Tsuboi et al. (1990) also investigated the effect of an applied magnetic field on a
conducting cantilever beam and analyzed the beam’s response. The response was predicted using
finite difference methods and the results were found to compare well with experiments performed
at Argonne National Laboratory. In a similar study Takagi et al. (1992) studied the deflection of
a thin copper plate subjected to magnetic fields both analytically and experimentally. They used
an electromagnet with very high current (several hundred Amperes) to generate the magnetic
field then analyzed the response of the plate to the applied field. The dynamic stability of a
beam-plate subjected to transverse magnetic fields was investigated by Lee (1996). The theory of
a magnetoeleastic plate immersed in a transverse magnetic field was developed and used to
determine that three regions of stability existed, damped stable oscillation, static asymptotic
stability and static divergence instability. The buckling field was also found to exhibit a linear
dependence on the geometry of the ratio of the thickness and length of the beam-plate. These
studies have investigating the effect of subjecting a conductive material to a magnetic field rather
than directly showing the damping effect, however the research does show that eddy currents can
be used for active control purposes.
Larose et al. (1995) performed a study into the ability to use passive eddy current dampers to
suppress the vibration of a bridge structure. A scaled model of the approach ramp to a suspension
bridge that consisted of six separate spans was constructed and wind tunnel tests were performed
to determine the vibrations induced in the bridge when excited by aerodynamic vortices. The
34
eddy current damper consisted of a permanent magnet mounted on the tip of a beam whose length
could be varied to adjust the stiffness. In close proximity to the surface of the permanent magnet
was an aluminum plate which facilitated the generation of the eddy currents. Using this damper
configuration, each if the first six modes had two absorbers tuned to provide damping of the
corresponding frequency, resulting in a total of 12 vibration absorbers fixed to the six different
spans of the structure. With each of the magnetic dampers properly tuned, it was found that the
global vibration of the system could be damped out, provided that the tuned mass damper was
positioned on the span at the maximum modal amplitude. If the particular vibration absorber
tuned to a specific mode was not placed at the span with the maximum modal amplitude then
only the vibration of that span would be damped.
With the advances in superconductor materials, many more systems are beginning to use
superconducting levitation for bearings, vibration isolation systems and non-contact
transportation systems. However, when an object is in levitation a very small amount of damping
is present, thus potentially causing issues in practical systems and making the device susceptible
to long settling times. Teshima et al. (1997) investigated the use of eddy currents to damp the
vibration of the suspended structure. To demonstrate the effectiveness of eddy current damping
for this application, a permanent magnet ring was levitated over a superconducting material
resting on a table exited by a shaker. The levitating force between the superconductor and the
permanent magnet acts as a sort of spring, causing the vibration of the superconductor to be
transferred to the permanent magnet as undamped base motion. To induce damping in the
system, various thickness copper plates were placed between the superconductor and the
levitating magnet. The effect of the conducting plate was that as the levitating magnet began to
vibrate, eddy currents were generated in the copper plate and the magnets vibration was damped
out. The authors found that the damping ratio of the system could be increased from
approximately 0.005 to 0.5. While it was found that this damper configuration functioned well
for vertical vibrations, it was determined that horizontal vibrations were unaffected by the
damper, indicating the need for additional components along the side of the levitating structure.
Matsuzaki et al. (1997) proposed the concept of a new vibration control system in which the
vibration of a beam, periodically magnetized along the span, is suppressed using electromagnetic
forces generated by a current passing between the magnetized sections. To confirm the vibration
suppression capabilities of their proposed system, they performed a theoretical analysis of a thin
beam with two magnetized segments subjected to an impulsive force and showed the concept to

35
be viable. Following the proposal of the previous concept, Matsuzaki et al. (2000) performed an
experimental study to show the effectiveness of this new vibration control system. However, a
partially magnetized beam was not available to the authors, so a thin beam with a current carrying
wire bonded to its surface along with a permanent magnet was used. The system was then
implemented to determine if the electromagnetic force generated by the wire was sufficient to
suppress the vibration of the beam. The results of their study showed that the force is capable of
damping the beam’s first few modes of vibration.
A common classroom experiment used to demonstrate eddy current damping is performed by
dropping a magnet down a conducting tube and noticing that the magnet falls far slower than a
nonmagnetic material. The reason that the magnet falls slowly is due to eddy currents generated
in the conducting tube, which create a viscous force, causing the magnet to have the appearance
that it is falling through honey. Hahn et al. (1998) analyzed this common classroom experiment
and constructed a damper using a permanent magnet with a spring attached to each side. The
system was then applied to various length, radius, thickness and composition pipes to determine
the damping effect. A model of the system was developed and compared to the experimental
results showing good agreement between the two.
The concept of using a viscoelastic material to dissipate energy from a structure was modified
to incorporated magnets by Oh et al. (1999). The study sandwiched a viscoelestic material
between magnetic strips that were configured to attract each other in one case and to repel in the
other. The damping system was attached to a plate and the frequency response of the system was
measured to determine the effectivness of the damping concept. It was determined that the
passive magnetic composite (PMC) treatments function best when the magnets were set to attract
each other and reduced the magnitude of vibration of the first, second and third mode by 40.4%,
83.4% and 14.88%, respectively. The system was also modeled using finite elements and the
results were shown to provide good results. This topic does not investigate eddy current damping
but rather a form of magnetic damping and will therefore not be reviewed further, for more
information on PMC treatments see Oh et al. (2000), Baz and Poh (2000), Ruzzene et al. (2000)
and Omer and Baz (2000).
Eddy currents can be induced in a conductive material through motional emf where the
conductor moves in a stationary magnetic field or transformer emf where the conductor remains
stationary and the magnetic source is either varied in intensity or moved relative to the conductor.
36
Graves et al. (2000) used an equivalent circuit technique to analyze rectangular and circular eddy
current damping systems for both types of emf generation. Their results found that in almost all
realistic situations, the motional emf devices will have a larger efficiency than the transformer
emf devices. However, for the case of a transformer emf device with a circular core, it was found
that the maximum device efficiency could be made to be approximately one third greater than
that of motional emf devices, but this configuration would have limited functionality. It was also
found that for the efficiency of a transformer emf device to be increased the size of the entire
system must also be increased, making these systems unsuited for use in suspension systems.
Zheng et al. (2001) studied the effect of a nonconductive beam with a single conductive coil at its
tip vibrating in a magnetic field. A non-linear mathematical model of the system was developed
to predict the free vibration response of the beam when given an initial displacement. The
authors performed a numerical simulation of model and predicted a strange effect; the damping
ratio of the beam is decreased as time progressed. The authors state that this effect can be
generalized to the case of a conductive beam moving in a magnetic field, however, no
experiments were performed to validate the accuracy of the model. Like Zheng et al. (2001),
Zheng et al. (2003) performed passive and active magnetic damping on a vibrating beam. In this
study, the vibration of a clamped-clamped beam was suppressed using a permanent magnet
attached to the beam and an electromagnetic coil attached to the clamped boundary condition. As
the beam vibrates the permanent magnet moves relative to the coil causing eddy currents to be
generated. If active control is desired then current is applied to the coil causing a magnetic force
between it and the permanent magnet. The proposed system was modeled and experiments were
performed to show the accuracy of the model. It was demonstrated that this concept of damping
treatment can effectively add damping to the structure.
The two studies performed by Zheng et al. (2001) and Zheng et al. (2003) developed a
magnetic damping system for the suppression of beam vibrations. However, neither of these two
studies develops damping systems that are realistically functional. In the case of Zheng et al.
(2001) the damping forces generated were extremely small and the accuracy of the model is
questionable. The system developed by Zheng et al. (2003) requires a coil to be placed at the
clamped boundary condition, in addition to a cumbersome viscoelestic device attached to the
beam making the system difficult to apply. These limitations were partially accounted for when
Kwak et al. (2003) proposed a concept for an eddy current damper that could suppress the
vibration of a beam. The concept used a flexible linkage with two permanent magnets and a fixed

37
copper plate attached to the end of a cantilever beam. The copper plate was rigidly fixed so that it
vibrated with the beam, but the magnets attached to the flexible linkage were able to vibrate with
their own dynamics causing the magnets to move past the copper plate and generate eddy
currents. The concept was constructed and tested to determine its effectiveness. It was shown
through experiments that critical damping of the beam could be achieved using this system.
Later, Bae et al. (2004) modified and developed the theoretical model of the eddy current damper
constructed by Kwak et al. (2003). Using this new model, the authors investigated the damping
characteristics of the eddy current damper and simulated the vibration suppression capabilities of
a cantilever beam with an attached eddy current damper numerically. The results showed the
potential of this eddy current damper for suppressing the vibration of a cantilevered structure.
However, while this concept does relieve most of the issues previously found, like Zheng et al.
(2003) it is still a cumbersome device and significantly modifies the dynamic response of the
beam.
The papers detailed in this section have shown some of the common uses of eddy currents for
dynamic systems. However, most of the papers detailed, have configured the magnets and
conductive material as shown in Figure 1.3. This configuration is not acceptable for damping the
transverse vibration experienced by many structures. Furthermore, the studies that have
investigated alternative methods using eddy currents to damp these vibrations have either been
marginally successful or cumbersome and difficult to apply. For applications such as membranes
the damping system must be applied such that it does not cause local surface imperfections,
significant stiffness or mass loading. Therefore, a need exists to develop an eddy current
damping systems that can be easily applied to a structure while still providing significant
damping. This dissertation will approach this problem and develop several non-contact methods
utilizing eddy currents to applied significant damping to the vibrating structure. Furthermore,
mathematical model of each method of eddy current damping will be developed to predict the
amount of damping generated and dynamic response of the system. These models will differ
from those previously developed because of the interaction of the magnet and conductive material
utilizes only the radial magnetic flux rather than the flux in the direction of poling as done in
magnetic braking applications. The models provided will also be shown to accurately predict the
dynamic interaction of the system.

38
1.3 Dissertation Overview
The following two sections will detail the contributions that this work has made in areas of
vibration damping and provide a detailed description of the research presented in each chapter of
this dissertation.
1.3.1 Contributions
This dissertation will investigate new methods of applying damping to a vibrating structure and
makes several contributions in this field. The damping mechanisms that will be described in the
following chapters all function through the eddy current that are induced in a conductive structure
that experiences a time changing magnetic flux. This time changing magnetic flux can be
generated in several different ways, each of which will be used to identify a new damping
mechanism that has not previously been demonstrated. Once the eddy currents are formed, they
circulate inside the conductor resulting in a magnetic field. This field due to the eddy currents
interacts with the applied field, inducing a force that resists the change in flux. As these currents
circulate, they are dissipated into heat due to the internal resistance of the conductive material,
thus resulting in a removal of energy from the system. The combination of the force generated by
the interaction of the applied field and the eddy currents and the subsequent dissipation of the
eddy currents, leads to a damping effect.
While the concept of eddy current damping is not new, the use of eddy current dampers for
the suppression of structural vibrations is an area where these methods of damping have not been
effectively applied. In previous studies that have investigated vibration damping using eddy
currents, the conductor was designed such that its motion was perpendicular to the poling axis of
the source of the magnetic field, as shown in Figure 1.3. This configuration has been widely used
for magnetic braking applications (see section 1.3.3). However, when vibration dampers other
than struts are designed in this way, they are typically cumbersome to the structure (Kwak et al.
2004) or ineffective (Zheng et al. 2003).
When designing a vibration damper, the effects due to mass loading and added stiffness,
while undesirable, are typically not a deciding factor in the system design. However, there has
been a recent push for the development of ultra lightweight deployable satellites, which due to the

39
lightweight and extreme flexibility require these effects to be strongly considered. Furthermore,
thin membranes are typically used as the metrology surface. The combination of strict surface
tolerances and the lightweight and flexible nature of the membrane structure lead to a severely
limited choice of actuation methods that can be applied without inducing performance hindering
surface aberrations. This issue is further complicated because the ability to suppress the vibration
of the membrane is crucial to the satellites performance. The eddy current effect can lead to an
ideal damping mechanism, however due to the ineffectiveness of the previously developed eddy
current damping mechanisms; their potential has not been realized. Therefore, the research
developed in this dissertation has identified three previously unknown methods of applying
damping to a vibrating structure and has developed the necessary modeling techniques required to
design and predict the performance of each.
The first damper studied is completely passive in nature and functions by generating eddy
currents from the motion of a conductive material in a static magnetic field. The configuration of
the magnet and conductor is such that the motion of the conductor is in the poling direction of the
magnet. Typical systems function such that the motion of the conductor is perpendicular to the
poling axis. This difference leads to a damping mechanism that can be easily incorporated into a
dynamic system for the suppression of transverse vibrations. Other passive eddy current damping
systems that have been designed for transverse vibration suppression have not been compatible
with practical systems. Furthermore, this damper does not contact the structure, thus allowing
control forces to be applied without modifying the system’s dynamics. This is particularly
important for the thin membranes used in deployable satellites, which if an actuator were bonded
to would induce surface irregularities and compromise the performance of the metrology device.
The passive eddy current damping mechanism developed also represents the only existing
completely passive non-contact vibration damper. Lastly, the theoretical modeling techniques
necessary to predict the dynamic response of a structure with the eddy current damper included
into the system have been developed. The models presented allow the damper to be designed
prior to its construction.
The second damping concept mechanism invented is a novel passive-active damper. This
damping scheme combines the passive damper with an active component to allow particular
modes of vibration to be targeted. As mentioned previously, the density of the induced eddy
currents is directly related to the rate of change in the magnetic flux. Therefore, by providing the
magnet with the ability to change its position relative to the beam and applying a feedback control

40
law, the net velocity between the beam and magnet can be maximized and the damping force
enhanced. This damping device has been modeled in both the closed and open loop allowing the
stability and performance of the controller to be identified. The new damping concept was
represents the first of its kind.
The third damping mechanism created is a completely active system. Rather than using the
velocity of a conductive medium in a static magnetic field to induce a time varying flux, an
electromagnet was used such that the strength of the magnetic flux could be actively varied to
cause a change in flux applied to either a static or moving conductor. In the case of a vibrating
system, both the motion of the conductor in the field and the time rate of change of the field
strength are responsible for the generation of eddy currents. Using this idea a theoretical model
was developed and numerical simulations performed to identify the proper form of the feedback
controller. This study is the first time that a active controller was developed that functions solely
through the eddy currents generated in a conductive material and the first study to provide and
validate the analytical equations necessary to predict the system response.
Three innovative damping mechanisms have resulted from this research that can apply
control forces to the structure without contacting it, which cannot be done by any other passive
vibration control system. Furthermore, the non-contact nature of these dampers makes them
compatible with the flexible membranes needed to advance the performance of optical satellites.
In addition to developing three previously unknown damping systems, the modeling techniques
required to design and predict the response of each mechanism have been formulated allowing the
dampers to be design before being build. The new non-contact dampers and modeling techniques
will certainly aid future research in the development of vibration control systems for extremely
flexible lightweight structures.
1.3.2 Dissertation Summary by Chapter
Chapter 1 provides an introduction to previous work in the topics associated with this
dissertation. The chapter begins by providing a brief outline of the concept of eddy current
damping then discusses the motivation for the research. It is detailed that there has been a recent
push for the development of ultra lightweight deployable structures and that these structures face
complicated dynamics testing and control issues. This is further complicated by the lack of

41
actuation methods compatible with lightweight flexible structures such as the membranes used as
the metrology surface of such satellites. Therefore the motivation of this dissertation is to
develop new actuation methods that are compatible with these structures. The chapter then
moves on to detail the history of inflatable structures and the previous work that has been
performed in the dynamic testing and control of these structures. Next a literature review of the
work that has been performed in the area of modeling, testing and control of metrology
membranes is provided. The chapter finishes with a thorough review of the work that has
performed using eddy current damping, including magnetic braking, damping rotating machinery
and damping of structural vibrations.
Chapter 2 begins presenting research into the development of new vibration damping
mechanisms. While this dissertation will develop three separate dampers, the second and third
chapters deal with a completely passive damping concept. The passive eddy current damper
consists of a permanent magnet placed a small distance from a conductive structure that vibrates
such that its motion is in the poling direction of the magnet. Because the conductor moves in the
poling axis rather than perpendicular to it as previous studies have done, the radial magnetic flux
is responsible for the formation of the eddy currents. The second chapter of this dissertation
presents a derivation of the equations defining the damping force generated by the motion of a
conductive material in a static magnetic field. In this derivation the image method is presented
and used to fulfill a zero eddy current density boundary condition. Subsequent to the
identification of the magnetic damping force, the interaction of the magnetic damper is coupled
into the equations of motion for a cantilever beam and a thin membrane under axial load. Using
the derived equation the dynamic response of the system with the eddy current damper present
can be predicted.
After the development of the theoretical model for the dynamics of the eddy current damper,
chapter 3 details the experiments performed to validate the accuracy of this model. The chapter
begins by investigating the accuracy of the model on a cantilever beam and shows that the
predicted damping ratio of the beam is accurate within 18% over a range of distances between the
magnet and the beam. It is also shown that the model’s accuracy is improved farther to 13%
when the image method is used. Using a single magnet the passive damper was also shown to be
able to increase the damping ratio of the first mode by more than 170 times. After showing the
effectiveness of the damper using a single magnet, the device performance was improved by
adding a second magnet opposite of the vibrating structure such that the magnets had similar
42
poles facing each other. The effect of positioning the magnets in this way is that the magnetic
field is compressed in the poling direction, thus causing an enhancement in the radial direction.
Because the magnetic flux in the radial direction is improved the density of the eddy currents
formed is increased resulting in amplified damping. This improved damper was both modeled
and experimentally tested. It was shown that the modeling techniques accurately predicted the
damping within 10% and that the first mode of vibration could be critically damped. Lastly the
passive damper was experimentally tested on a thin Mylar membrane at both vacuum and
ambient pressure. The experiments showed that significant damping could be applied in both
conditions and that the modeling techniques could accuracy predict the damping ratio.
As mentioned, the eddy currents formed are proportional to the time rate of change of the
magnetic flux applied to the conductor. In the passive case this time rate of change was simply
the velocity of the conductor in the static magnetic field. Chapter 4 has taken the passive concept
a step further and developed a damping mechanism in which the magnet is free to move relative
to the vibrating structure, thus allowing the velocity between the magnet and conductor to be
maximized and more eddy currents to be formed. This new passive-active damper uses a
feedback control law to actively adjust the position of the magnet. The passive-active system has
been fully modeled in the closed-loop, thus allowing the dynamics of the beam to be modeled.
Following the development of the theoretical model of the system, experiments were performed
to verify its accuracy and show the performance of the damping device. An electromagnetic
shaker was used as the actuation method to actively displace the magnet. This actuator was
chosen because it was readily available, however it could only effectively displace the magnet up
to 100Hz and limited the bandwidth of the controller to only the first two modes. It was found
that the closed loop response of the system could be very accurately predicted and that the
damper could reduce the first mode of vibration by approximately 33 dB.
The third and last damping mechanism developed in this dissertation is a completely active
damping system. In the two previous studies, a permanent magnet was used to generate the
magnetic field and the beam motion in that field was responsible for the formation of the eddy
currents. In the active damper, the current supplied to an electromagnetic is varied thus inducing
a time changing magnetic field of the conductive material. The system uses a feedback controller
to modify the current based on the velocity of the vibrating structure. The theoretical equations
defining the induced eddy currents and the damping force are first derived. Once these equations
are known the system is numerically simulated and a second order filter is designed to apply the

43
needed vibration suppression. Lastly experiments are performed to show the accuracy of the
model and the performance of the new damping mechanism. Unlike the passive-active damper
that could only apply control to the first two modes (due to the choice of actuator, higher modes
could be controlled if an actuator with a greater bandwidth were used) the active system can
easily target higher frequency modes. The active controller was experimentally shown to be able
to apply approximately 25dB reduction to each of the first five modes.
The final chapter of this thesis is Chapter 6, and provides a brief overview of the results
found throughout this dissertation. Following the overview, a discussion of the contributions
that this work has made and how they will affect future research is outlined. The final section of
this chapter and the dissertation, describes the possible future work that could be performed to
further the research that has been completed.
44
Chapter 2
Modeling of Passive Eddy Current
Dampers
2.1 Introduction to Eddy Currents
The performance of almost every engineering structure benefits from incorporating some type
of vibration damping mechanism into its design. Over the past few decades, significant attention
has been given to the development of efficient actuation devices for the suppression of structural
vibrations. These studies have led to vibration control systems that utilize a variety of materials
such as lead zirconate titanate (PZT), terfenol-D, electro-rheological, magneto-rheological, and
shape memory alloys. However one method of providing vibration damping that has not seen
significant research as a vibration suppression method is eddy current damping. Dampers of this
type function through the eddy currents that are generated when a nonmagnetic conductive
material is subjected to a time changing magnetic field. These eddy currents circulate in such a
way that they induce their own magnetic field. The polarity of the eddy current field varies such
that the force between it and the applied magnetic field always causes a force opposite to the
velocity of the conductor. These currents dissipate energy as they flow through the resistance of
the conductor. The resulting drag force on the conductor is proportional to its velocity relative to
the field. The device thus functions as a viscous damping element that can be effectively used to
suppress structural vibrations.
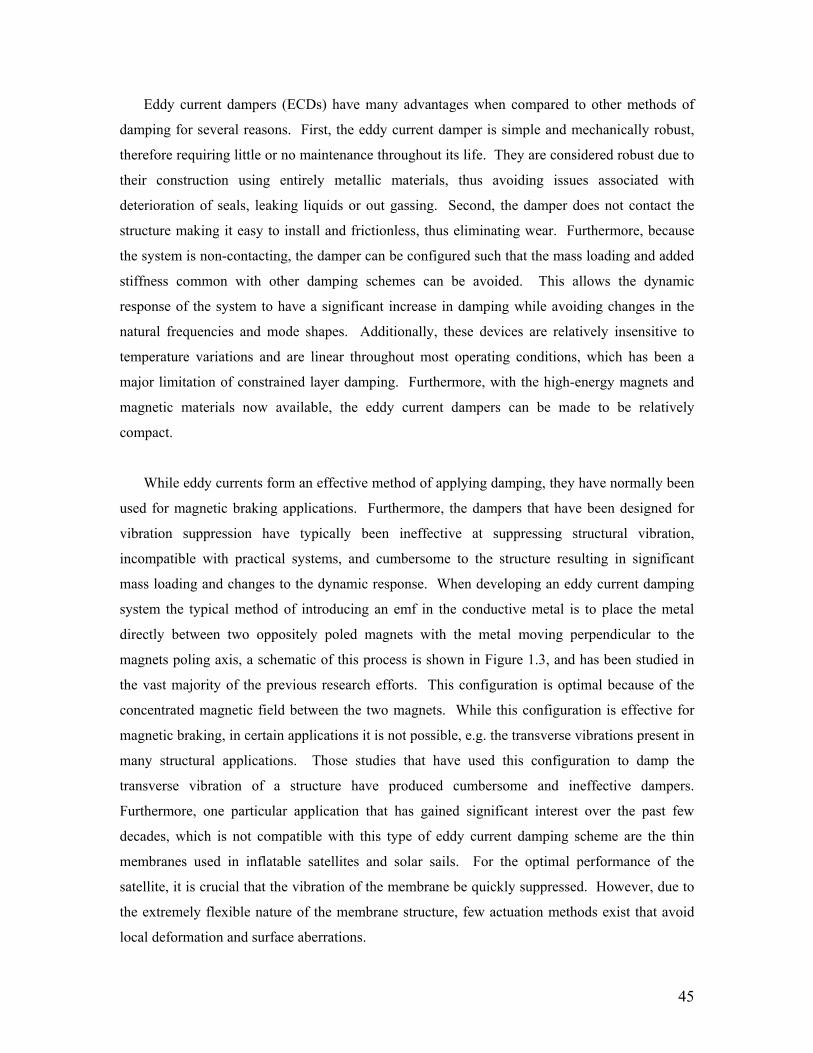
45
Eddy current dampers (ECDs) have many advantages when compared to other methods of
damping for several reasons. First, the eddy current damper is simple and mechanically robust,
therefore requiring little or no maintenance throughout its life. They are considered robust due to
their construction using entirely metallic materials, thus avoiding issues associated with
deterioration of seals, leaking liquids or out gassing. Second, the damper does not contact the
structure making it easy to install and frictionless, thus eliminating wear. Furthermore, because
the system is non-contacting, the damper can be configured such that the mass loading and added
stiffness common with other damping schemes can be avoided. This allows the dynamic
response of the system to have a significant increase in damping while avoiding changes in the
natural frequencies and mode shapes. Additionally, these devices are relatively insensitive to
temperature variations and are linear throughout most operating conditions, which has been a
major limitation of constrained layer damping. Furthermore, with the high-energy magnets and
magnetic materials now available, the eddy current dampers can be made to be relatively
compact.
While eddy currents form an effective method of applying damping, they have normally been
used for magnetic braking applications. Furthermore, the dampers that have been designed for
vibration suppression have typically been ineffective at suppressing structural vibration,
incompatible with practical systems, and cumbersome to the structure resulting in significant
mass loading and changes to the dynamic response. When developing an eddy current damping
system the typical method of introducing an emf in the conductive metal is to place the metal
directly between two oppositely poled magnets with the metal moving perpendicular to the
magnets poling axis, a schematic of this process is shown in Figure 1.3, and has been studied in
the vast majority of the previous research efforts. This configuration is optimal because of the
concentrated magnetic field between the two magnets. While this configuration is effective for
magnetic braking, in certain applications it is not possible, e.g. the transverse vibrations present in
many structural applications. Those studies that have used this configuration to damp the
transverse vibration of a structure have produced cumbersome and ineffective dampers.
Furthermore, one particular application that has gained significant interest over the past few
decades, which is not compatible with this type of eddy current damping scheme are the thin
membranes used in inflatable satellites and solar sails. For the optimal performance of the
satellite, it is crucial that the vibration of the membrane be quickly suppressed. However, due to
the extremely flexible nature of the membrane structure, few actuation methods exist that avoid
local deformation and surface aberrations.

46
To overcome the limitations associated with the presently available eddy current dampers this
dissertation will develop several new damping mechanisms that can be applied to a structure in a
non contact way to provide significant damping. This chapter will develop the theoretical model
of a novel passive eddy current damper. However, while the chapter focuses on this passive
damping concept the theoretical models developed in this chapter will later be modified to predict
the damping capabilities of a semi-active damper and an active damper in subsequent chapters.
Furthermore, this chapter will only derive the models necessary to predict the effect of the
damper on the applied structure and the validation of these models will be provided in chapter 3.
2.2 Theoretical Model of the Passive Eddy Current Damper
2.2.1 Passive Eddy Current Damper Configuration
The passive eddy current damping concept that will be developed and modeling in this
chapter consists of a permanent magnet that is both fixed in positions and strength and located a
small distance, typically between 1 and 10mm from the beam. The motion of the beam is in the
poling direction of the magnetic as shown in Figure 2.1. Due to the permanent magnet a
magnetic field is generated and due to the motion of the beam in this field, the conductor
experiences a time varying magnetic flux inducing eddy currents in the conducing sheet that has
been attached to the beam. Figure 2.2 shows the conducting sheet of thickness δ and conductivity
σ moving with velocity v in the gap lg between the circular magnet and the conductor. Figure 2.2,
also shows that the eddy currents circulate on the conducting sheet in the x-y plane, causing a
magnetic field to be generated that will interact with the applied field.
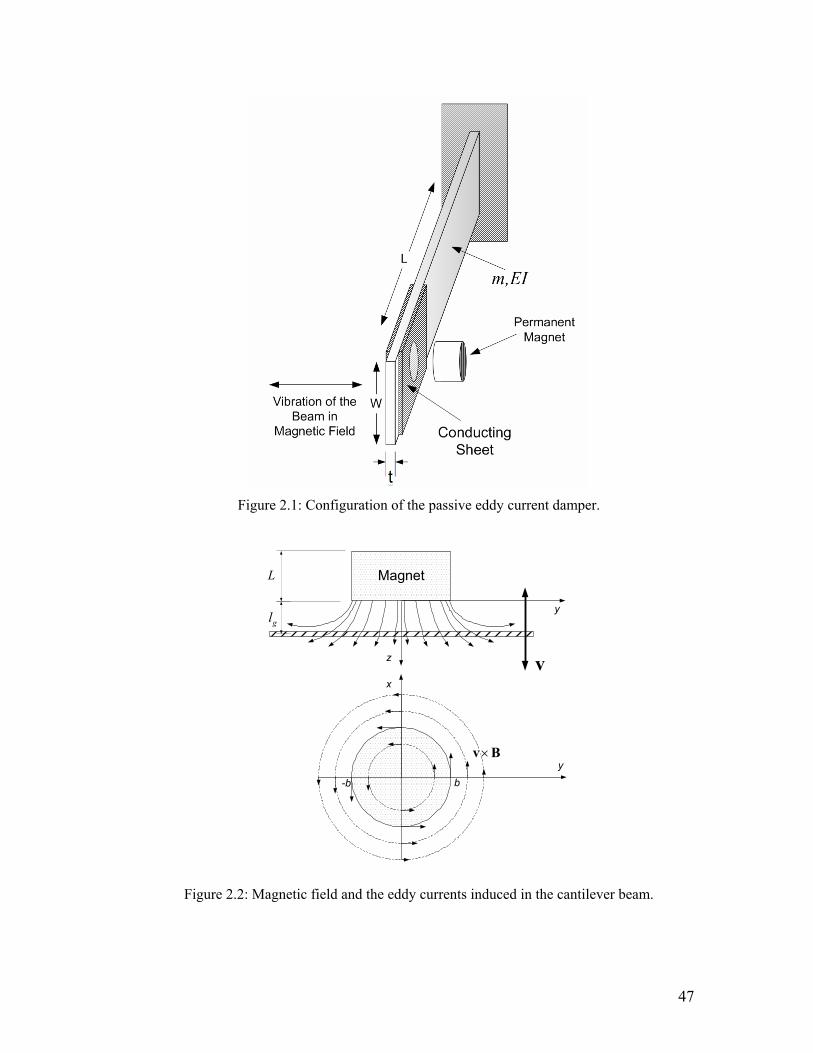
47
t
Figure 2.1: Configuration of the passive eddy current damper.
Magnet
x
y
z
y
v
×v B
gl
L
b-b
Figure 2.2: Magnetic field and the eddy currents induced in the cantilever beam.

48
2.2.2 Eddy Current Damping Force
The symmetry of the circular permanent magnet allows the surface charges to be ignored and
thus the eddy current density J induced in the conductive sheet due to the applied magnetic flux
B, can be written as
( )BvJ ×= σ (2.1)
where v is the velocity, σ is the conductivity, and the term ×v B is an electromotive force
driving the eddy currents J . The velocity and magnetic flux can be written as follows
kjiv zv++= 00 (2.2)
kjiB zyx BBB ++= (2.3)
where the velocity is only in the z-direction. Substitution of equations (2.2) and (2.3) into
equation (2.1) allows the eddy current density to be defined by
( ) ( )jiBvJ xyz BBv +−=×= σσ (2.4)
The above equation shows that the magnetic flux in the z-direction has no effect on the induced
eddy currents and that the induced currents are solely dependent on the x- and y-components of
the magnetic flux or the flux tangential to the face of the conducting sheet. This is an important
concept to note because it is opposite of the way that eddy currents are generated in magnetic
braking applications. Therefore, the typical design of eddy current dampers must be reconsidered
when developing the type of dampers analyzed in this dissertation.
Since the magnetization inside the magnet is constant, there is no equivalent volume current
density and the equivalent magnetization can be analyzed as a surface current density on the side

49
wall of the magnet. Therefore, the magnet is like a cylindrical sheet with a lineal current density.
Thus the magnetic flux density due to a circular magnetized strip, shown in Figure 2.3 can be
written as (Cheng, 1992)
φπ
µ πd
RdMd ∫×
=2
0 31
100
4RlB (2.5)
where 31R is the cubic of the magnitude of R1 and µ0 and M0 are the permeability and the
magnetization per unit length, respectively. The vector R1 is defined by the distance between the
differential element on the circular strip and the point on the y-z plane as shown in Figure 2.3 and
defined as
rRR −=1 (2.6)
where R is the vector defining the position of the point, P(R, θ, z) in space at which the magnetic
flux is to be determined and r is the vector defining the position of the differential element,
which can be written as
kjR zy += (2.7)
jir φφ sincos bb += (2.8)
where φ is the angular position along the magnetized strip of radius b as illustrated in Figure 2.3.
The vector dl is the length of the infinitesimal strip and can be written as
jil φφφφ dbdbd cossin +−= (2.9)

50
φ
R
1R
rθ
( ), ,P R zθ
y
z
x
dlb
b
Figure 2.3: Schematic of the Circular magnetized strip depicting the variable used in the analysis.
Substitution of equations (2.6) and (2.9) into equation (2.5) allows the magnetic flux density
due to the circular magnetized strip to be written as
( )( )zybIbzMd
ybzyb
bzMdBy ,,4sin2
sin4 1
002
0 23222
00
πµφ
φ
φπ
µ π=
−++= ∫ (2.10)
( )( )zybIbMd
ybzyb
ybbMdBz ,,4sin2
sin4 2
002
0 23222
00
πµφ
φ
φπ
µ π=
−++
−= ∫ (2.11)
where 1I and 2I include elliptic integrals that do not have a closed form solution and are shown
in Appendix A. To obtain the magnetic flux density due to the entire permanent magnet the flux
form the strip must be integrated over the length of the magnet. Hence, the magnetic flux density
in the radial or y-direction and the poling or z-direction due to the circular cylindrical magnet of
length L are written by
( ) ( ) ( )∫− ′′−′−=0
100 ,,
4,
Ly zdzzybIzzbMzyBπ
µ (2.12)

51
( ) ( )∫− ′′−=0
200 ,,
4,
Lz zdzzybIbMzyBπ
µ (2.13)
where 'z and L are the distance in the z-direction from the center of a magnetized infinitesimal
strip and the length of the circular magnet, respectively. As shown in Figure 2.2, the magnetic
flux distributions in equations (2.12) and (2.13) are symmetric about the z-axis due to the
symmetry of the circular magnet.
Since the velocity of the conducting sheet is in the z direction, the magnetic flux density Bz
does not contribute to the damping force. Using equations (2.1), (2.12), and (2.13), the damping
force due to the eddy current is defined by the cross product of the eddy current density and the
magnetic flux integrated over the volume of the conductor written as
( )( )∫
∫ ∫∫
−=
−=
×=
c
c
r
gy
g
r
y
V
dylyyBv
dydlyyBv
dV
0
2
2
0 0
2
,2
,
πσδ
φσδπ
k
k
BJF
(2.14)
where δ and v are the thickness and the vertical velocity of the conducting sheet, respectively, rc
is the equivalent radius of the conductor that preserves its surface area and lg is the distance
between the conducting sheet and the bottom of magnet as shown in Figure 2.2. Since the
magnetic flux densities in equations (2.12) and (2.13) are symmetric about the z-axis, the x and y
component of the damping force are zero. The equations defined in (2.12)-(2.14) cannot be
integrated analytically due to the elliptical integrals shown in Appendix A, therefore a numerical
integration method must be used to obtain the damping force in equation (2.14) and will be
detailed in a later section.
2.2.3 Application of the Image Method for a Finite Conductor
The analysis performed in section 2.2.2 does not account for the zero eddy current density
boundary conditions of the conductor. This means that the equations provided will only be
accurate for an infinite conducting sheet. Neglecting the edge effects in the model will cause the

52
predicted damping to be greater than actually present, because the eddy current density is not
required to be zero at the edges. The result of this is that the integration over the volume of the
conductor performed in equation (2.14) will result in an increased damping force even if the
integration is not performed over an infinite domain. In order to account for the edge effects, the
image method (Lee and Park, 2002) can be used to satisfy the boundary condition of zero eddy
current density at the conducting plate’s boundaries. The technique of using the image method
consists of calculating the eddy current density then creating a mirror image of the calculated
density that is rotated about the edge of the conductor. Following this, the imaginary density is
subtracted from the eddy current density, thus enforcing a zero density condition at the edge of
the conductor. A schematic showing how the image method is used can be seen in Figure 2.4.
Figure 2.4: Schematic demonstrating the effect of the imaginary eddy currents.
Mathematically this process is as follows: the incorporation of the imaginary eddy current
density, allows the net eddy current in the radial direction J ′ , to be written as
( ))2()1(yy JJ −=′J (2.15)
where the subscript y indicates the radial direction and the imaginary eddy current density ( )2yJ is
written as
)2()( )1()2( yAJyJ yy −= (2.16)

53
where ( )1yJ is the predicted eddy current density from equation 2.4 and the dimension A
corresponds to half the length of the conducting plate as shown in Figure 2.5. Only one
imaginary eddy current is needed because the conductor is modeled as a circular plate with the
same area as the original conductor as shown in Figure 2.5. This assumption is made to simplify
the integration of equations (2.12)-(2.14). Substituting equations (2.15) and (2.16) into equation
(2.14), the damping force accounting for the imaginary eddy currents is defined as
( ) ( )
( ) ( ) ⎥⎦⎤
⎢⎣⎡ −−−=
⎥⎦⎤
⎢⎣⎡ −−−=
×′=
∫∫
∫ ∫∫ ∫
∫
cc
cc
r
gy
r
gy
g
r
yg
r
y
V
dylyAyBdylyyBv
dydlyAyBdydlyyBv
dV
0
2
0
2
2
0 0
22
0 0
2
,2,2
,2,
πσδ
φφσδππ
k
k
BJF
(2.17)
As before, the integration of equation (2.17) cannot be analytically performed and must therefore
be determined using a numerical technique. From equation (2.17) it is apparent that the eddy
current force is a viscous force because the velocity of the beam, v, is directly proportional to the
magnitude of the force. The resulting value of this force can be coupled into the equations of
motion for the system that it will be interacting with.
In this dissertation the ability of the passive damper to suppress the vibration of a cantilever
beam and a thin membrane subjected to an axial load will be studied. This will allows
experiments to be precisely performed such that the accuracy of that the theoretical model can be
identified without concern in error from experiments of more complex structural models. In the
following section the mathematical model of a beam with the eddy current damping force
incorporated into its dynamic response will be developed. Subsequent to this, section 2.2.5 will
derive the equations of motion for a thin membrane under axial load with the eddy current
damper.

54
Figure 2.5: Schematic showing the variables associated with the conducting plate.
2.2.4 Modeling of Beam with Eddy Current Damping Force
The dynamic response of the beam can be formulated using the assumed modes method
applied to an Euler-Bernoulli beam. This method assumes that the response can be modeled as a
summation of trial functions that satisfy the boundary conditions of the system and a temporal
coordinate as
( ) ( ) ( ) ( ) ( )trxtrxtxuN
iii φφ == ∑
=1
, (2.18)
where )(xiφ is the assumed mode shapes of the structure that can be set to satisfy any
combination of boundary conditions, r(t) is the temporal coordinate of the displacement, and N is
the number of modes to be included in the analysis. The kinetic energy T, potential energy V,
non-conservative forces D, and external forces Q for the beam are defined by
( )
∫ ⎥⎦⎤
⎢⎣⎡
∂∂
=L
dxt
txuT0
2,21 ρ (2.19)

55
( )∫ ⎥
⎦
⎤⎢⎣
⎡∂
∂=
Ldx
xtxuEIU
0
2
2
2 ,21
(2.20)
( )∫ ⎥⎦
⎤⎢⎣⎡
∂∂
−=L
b dxt
txucD0
2,21
(2.21)
( ) ( ) ( )[ ] ( )∫ −+=L
ji dxtxuxxtFtxfQ0
,, δ (2.22)
here u(x,t) is the displacement of the beam, ρ is the density per unit area, V is the volume of the
beam, F is a concentrated force acting on the beam, f(x,t) is a distributed force acting on the
beam, E is the modulus of elasticity, I is the moment of inertial of the beam, δ is the dirac delta
function, and cb is the beam’s internal viscous damping. Using the assumed series solution of
equations (2.19)-(2.22), the kinetic energy, potential energy, non-conservative forces, and
external forces can be rewritten as
( ) ( ) ( ) ( ) ⎥⎦⎤
⎢⎣⎡= ∫∑∑
= =
L
ji
N
i
N
jji dxxxtrtrT
01 12
1 φρφ (2.23)
( ) ( ) ( ) ( )⎥⎦
⎤⎢⎣
⎡= ∫∑∑
= =
L jiN
i
N
jji dx
dxxd
dxxdEItrtrU
0 2
2
2
2
1 121 φφ (2.24)
( ) ( ) ( ) ( ) ⎥⎦⎤
⎢⎣⎡= ∫∑∑
= =
L
jib
N
i
N
jji dxxxctrtrD
01 12
1 φφ (2.25)
( ) ( ) ( ) ( ) ( )∑ ∫ ∑= =
⎥⎦
⎤⎢⎣
⎡+=
m
kk
L p
iikik trxtFdxxtxfQ
10
1
, φφ (2.26)
The equations of motion for the Euler-Bernoulli beam can be determined by solving Lagrange’s
equation defined by
jjjjj
QrV
rD
rT
rT
dtd
=∂∂
+∂∂
+∂∂
−⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
(2.27)
Substitution of equations (2.23)-(2.26) into equation (2.27) and solving provides the equations of
motion as

56
( ) ( ) ( ) ( ) ( ) ( ) ( )∫ ∑=
+=++L p
iii xtFdxxtxftrtrtr
01
, φφKCM (2.28)
where the mass matrix M, damping matrix C, and the stiffness matrix K are determined by
substitution of the beam’s properties into the following equations
( ) ( )∫==L T
ij dxxxm0
φφρM (2.29)
( ) ( )∫==L
bT
ij dxxcxc0
φφC (2.30)
( ) ( )∫ ′′′′==L T
ij dxxxEIk0
φφK
(2.31)
The damping force generated by the eddy current damper is incorporated into the response of the
system as a concentrated force term that is dependent on the velocity between the magnet and the
beam defined by
( ) ( ) ( ) ( )trxcxtF eeφφ =11 (2.32)
where ( )exφ is the magnitude of the mode shape at the location of the eddy current damper, ce is
the eddy current damping force determined by dividing the eddy current force in equation (2.17)
by the velocity, v, and ( )tr is the velocity of the beam. Substitution of equations (2.29)-(2.32)
into equation (2.28) defines the equation of motion of the beam including the passive eddy
current damper. The accuracy of the modeling techniques used here will be experimentally
verified in chapter 3.
2.2.5 Modeling of Slender Membrane under Axial Load with Eddy Current
Damping Force
Due to the non-contact nature of the eddy current damper it is particularly well suited for use
with extremely flexible structures that cannot be controlled with traditional actuators, such as the
ultra large membranes used in inflatable space structures. For the optimal performance of the
satellite, it is crucial that the vibration of the membrane be quickly suppressed. However, due to

57
the extremely flexible nature of the membrane structure, few actuation methods exist that avoid
local deformation and surface aberrations.
Eddy currents do have many properties that make them ideal for use with these structures
because they are non-contacting and thus avoid surface irregularities due to bonding. In addition,
they apply a distributed force therefore minimizing localized excitation. However, the use of
eddy current damping mechanisms with the extremely thin materials has not been shown to be
capable of generating sufficient forces to suppress the structures vibrations. The problem that a
thin conductor may not function well as an eddy current damper can be seen by examining
equation (2.17), which shows that the damping force is directly related to the thickness of the
conductive medium. Therefore, the theoretical model of the eddy current damping system when
applied to a thin membrane will be developed to identify the compatibility of these thin
membranes and eddy current dampers.
The membrane used for this study was chosen to resemble a beam rather than a 2-
dimensional membrane, thus allowing dynamic testing to be performed in the available vacuum
chamber. A schematic of the layout of the membrane and magnetic are shown in Figure 2.6.
Because the Membrane is extremely flexible in nature, both excitation and sensing methods are
very limited. By using a slender membrane the ability to experimentally identify bending modes
and correlate them with the model is greatly simplified. Furthermore, the question is not whether
the passive eddy current damping techniques will work on a 2-dimensional membrane but rather
if they will generate sufficient damping forces on a very thin structure. Additionally, because this
system is passive, it does not have stability issues that would make the damper effective for use
with a slender membrane but ineffective with a 2-dimensional membrane, thus if it can
effectively add damping to a slender membrane then it will also add damping to a 2-diminsional
structure.

58
Figure 2.6: Schematic of the configuration of the membrane and permanent magnet.
The membrane itself is typically not conductive and therefore must have some type of
conductive coating applied to it. In space applications, the membrane would be constructed with
a conductive layer on one side, however, this type of material was not available. Because the
commercially available membranes were not conductive, a conductive copper material was
applied to the membrane, the details of which will be supplied in chapter 3. While the membrane
used in this research is a one dimension structure and could be modeled as a string, the copper
conductor bonded to the membrane material is not void of stiffness. Therefore a beam model
must be used to allow the stiffness of the copper patch to be included in the model. The structure
can be modeled as an Euler-Bernoulli beam subjected to an axial load. The equation of motion
for a beam under an axial load was formulated by Shaker (1975) as
( )( )
( ) ( )( )
( ) 0,,,2
2
2
2
4
4
=∂
∂+
∂∂
+∂
∂t
txwxEIx
xtxw
xEIP
xtxw ρ
(2.34)
where w(x,t) is the transverse deflection of the beam, P is the axial load, ρ(x) is the mass per unit
length, and EI(x) is the beading stiffness along the x-direction of the membrane and copper patch.
From the equation of motion, the kinetic energy and potential energy can be written as
( ) ( ) dxt
txwxTL
2
0
,21∫ ⎥⎦
⎤⎢⎣⎡
∂∂
= ρ (2.35)

59
( ) ( ) ( ) dxx
txwPx
txwxEIUL
∫⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦⎤
⎢⎣⎡
∂∂
+⎥⎦
⎤⎢⎣
⎡∂
∂=
0
22
2
2 ,,21
(2.36)
were T is the kinetic energy, U is the potential energy and L is the length of the beam. The
external forces can be written as
( ) ( ) ( )[ ] ( )∫ −+=L
ji dxtxuxxtFtxfQ0
,, δ (2.37)
where f(x,t) is a distributed force acting on the beam and F is a concentrated force acting on the
beam. The assumed modes method allows the response of the beam to be written as the
summation of the product of test functions that satisfy the boundary conditions and a temporal
coordinate as follows
( ) ( ) ( )∑=
=n
iii trxtxw
1
, φ (2.38)
where ( )xiφ is the ith test function or mode shape, r(t) is the temporal coordinate and n is the
number of modes to be considered. Substitution of equation (2.38) into equations (2.35)-(2.37)
allows the kinetic energy, potential energy and external forces to be written as
( ) ( ) ( ) ( ) ⎥⎦⎤
⎢⎣⎡= ∫∑∑
= =
L
ji
N
i
N
jji dxxxtrtrT
01 12
1 φρφ (2.39)
( ) ( ) ( ) ( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+= ∫∑∑
= =
L jjiN
i
N
jji dx
dxxd
Pdx
xddx
xdEItrtrU0 2
2
2
2
1 121 φφφ (2.40)
The kinetic and potential energy can now be plugged into Lagrange’s equation which is shown in
equation (2.27) to obtain the equation of motion as
( ) ( ) ( ) ( ) ( ) ( ) ( )∫ ∑=
+=++L p
iii xtFdxxtxftrtrtr
01
, φφKCM (2.41)

60
where M and K are the mass and stiffness matrix, respectively and are defined as
( ) ( ) ( )dxxxxmL T φφ∫= 0
M (2.42)
( ) ( ) ( ) ( ) ( )∫∫ ⎟
⎠⎞
⎜⎝⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
LT
LT
dxdx
xddx
xdPdxdx
xddx
xdxEI00 2
2
2
2 φφφφK (2.43)
The eddy current damping forces are external forces that are dependent on the velocity of the
beam and are defined by
( ) ( ) ( ) ( )trxcxtF eeφφ =11 (2.44)
where ( )exφ is the magnitude of the mode shape at the location of the eddy current damper and
( )tr is the velocity of the beam. Because these forces are viscous forces they can be added into
the damping matrix C along with the beams damping as
( )[ ]ee xc φ+= bCC (2.45)
where Cb is the internal damping of the beam and ce is damping from eddy currents determined
by dividing the eddy current force in equation (2.17) by the velocity, respectively. The beam’s
damping is determined through experiments. Using these equations the dynamics of the
membrane with an eddy current damper can now be predicted.
2.3 Chapter Summary
Chapter two has developed the theoretical models necessary to predict the damping force
generated by a new passive eddy current damper. The chapter begins by detailing the
configuration of the new passive damping concept. The damper is different from other eddy
current dampers because the direction of the conductor’s motion is in the poling direction rather
than perpendicular to it. Due to this configuration, the damper is capable of suppressing the
transverse structural vibrations without contacting it. This makes the damper easy to install and
61
allows significant damping to be added while allowing the other properties and dynamics of the
structure to be unaffected by its addition to the system. Furthermore, because the damped is of
passive nature it is robust to parameter changes and requires no additional energy. However, this
configuration of the damper does require some type of secondary structure to support the magnet,
which may be a draw back in certain structures.
While the system provides advantages over other damping techniques, the performance of the
new system is significantly different from those that have been traditionally used. For this reason
the theoretical model of the damper had not been previously developed. Therefore, chapter 2 has
deriving the equations required to determine the eddy current damping force generated by a
cylindrical permanent magnet in close proximity to a vibrating structure. This derivation requires
that the magnetic flux of the magnetic be identified such that the eddy current density can be
determined. Typical eddy current dampers use two magnets positioned such that opposite poles
are facing each other with a small gap between them. This configuration allows the magnetic
flux between the magnets to be assumed to be constant. However, because the damper that has
been developed in this chapter is not configured in this way, the entire magnetic flux around the
magnet must be determined. The solution for the magnetic flux has been identified; however the
necessary integration cannot be analytically solved, requiring a numerical technique to be used.
Following the identification of the magnetic flux from the magnet the eddy current density and
eddy current damping force can be found. It was shown that unlike traditional eddy current
dampers the radial magnetic flux is responsible for the creation of eddy currents rather than the
magnetic flux in the poling direction. Additionally, the eddy current damping force is dependent
on the velocity of the conductor in the magnetic field causing the system to function as a viscous
damper.
Once the eddy current damping force had been identified it could be incorporated into the
dynamic equations of the structure it will be integrated into. In this dissertation, the passive
damper will be used to suppress the vibration of a beam and a thin membrane. A thin membrane
is investigated because the eddy current damping force is dependent on the thickness of the
conductor and therefore may not be able to generate sufficient force to suppress the vibration of
an extremely thin structure. Therefore, a theoretical derivation of the equation of motion for
these two systems was performed. Because the eddy current force is a viscous term it can be
easily included in the damping terms of the equation of motion. In the chapter 3 an experimental
validation of the equations developed in this chapter will be performed. This validation will show

62
the accuracy of the equations derived here and demonstrate the effectiveness of this damping
mechanism. Additionally, results of the numerical analysis of the eddy current damping force
and magnetic flux will be provided.
63
Chapter 3
Experimental Verification of Passive
Eddy Current Damper Models
3.1 Chapter Introduction
Past eddy current dampers that were designed to suppress transverse vibrations have typically
been incompatible with practical systems, ineffective at suppressing structural vibration, and
cumbersome to the structure resulting in significant mass loading and changes to the dynamic
response. Zheng et al. (2003) developed a damping system that functioned by placing a magnetic
near the root of a beam, and using a coil mounted at the clamped boundary condition to generate
a controlled magnetic force to suppress the vibration. The system was shown to provide
additional damping; however this added damping was small and the number of applicable
structures was significantly limited. A study performed by Kwak et al. (2003), developed an
eddy current damper that consisted of two permanent magnets attached to a cantilever beam with
a flexible linkage. The linkage allowed the magnets to move past a conductive plate rigidly fixed
at the end of the beam. Through a theoretical analysis and experiments, the damper was shown to
apply significant damping to the beam. On the other hand the system was only compatible with a
cantilever type structure and substantially changed the dynamics of the beam. The studies
discussed above are only two of the many eddy current damping systems developed to suppress
structural vibrations (see chapter 1 for details); however, both show the common limitations faced
by most all currently available eddy current dampers.
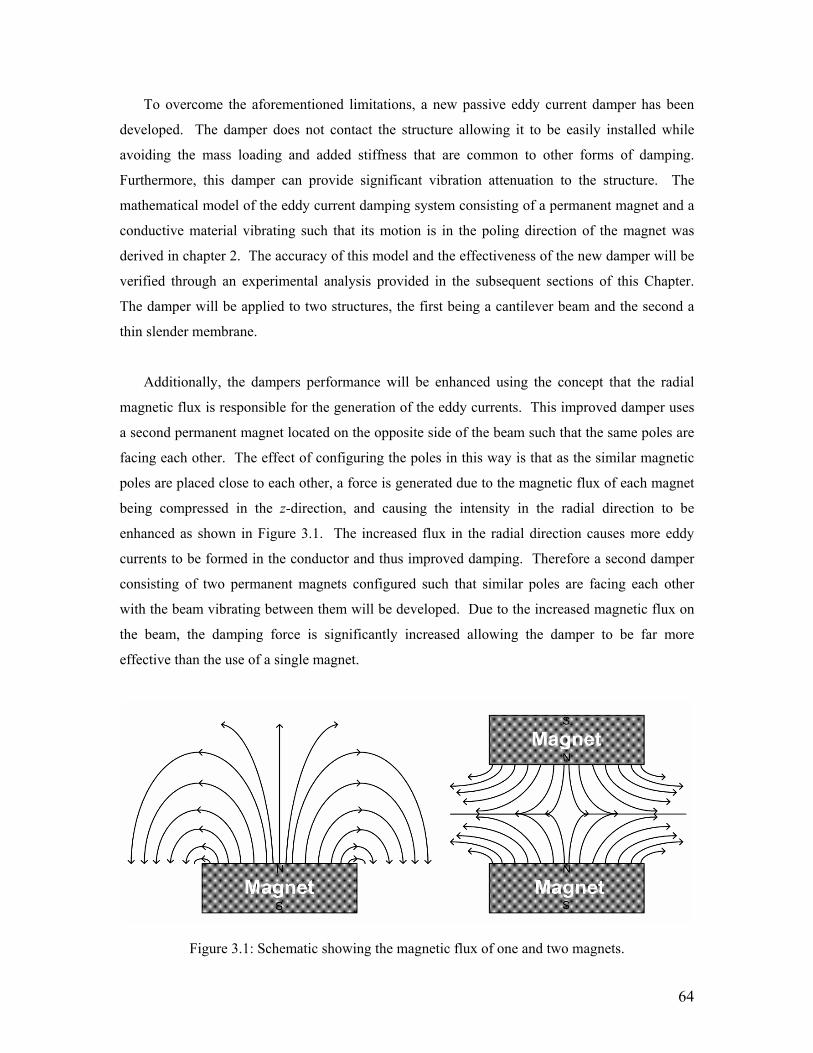
64
To overcome the aforementioned limitations, a new passive eddy current damper has been
developed. The damper does not contact the structure allowing it to be easily installed while
avoiding the mass loading and added stiffness that are common to other forms of damping.
Furthermore, this damper can provide significant vibration attenuation to the structure. The
mathematical model of the eddy current damping system consisting of a permanent magnet and a
conductive material vibrating such that its motion is in the poling direction of the magnet was
derived in chapter 2. The accuracy of this model and the effectiveness of the new damper will be
verified through an experimental analysis provided in the subsequent sections of this Chapter.
The damper will be applied to two structures, the first being a cantilever beam and the second a
thin slender membrane.
Additionally, the dampers performance will be enhanced using the concept that the radial
magnetic flux is responsible for the generation of the eddy currents. This improved damper uses
a second permanent magnet located on the opposite side of the beam such that the same poles are
facing each other. The effect of configuring the poles in this way is that as the similar magnetic
poles are placed close to each other, a force is generated due to the magnetic flux of each magnet
being compressed in the z-direction, and causing the intensity in the radial direction to be
enhanced as shown in Figure 3.1. The increased flux in the radial direction causes more eddy
currents to be formed in the conductor and thus improved damping. Therefore a second damper
consisting of two permanent magnets configured such that similar poles are facing each other
with the beam vibrating between them will be developed. Due to the increased magnetic flux on
the beam, the damping force is significantly increased allowing the damper to be far more
effective than the use of a single magnet.
Figure 3.1: Schematic showing the magnetic flux of one and two magnets.

65
3.2 Experimental Testing and Results of the Passive Eddy
Current Damper Concept
The passive eddy current damper consists of a single permanent magnet fixed a small distance
from a vibrating beam with a conductive patch bonded to its surface. The beam vibrates in the
magnetic field such that its motion is in line with the poling direction of the magnet causing the
radial magnetic flux to induce an electromotive force (emf). This emf allows the eddy currents to
be continuously generated and subsequently dissipated by the internal resistance of the
conductive material. The dissipation of the eddy currents causes a removal of energy form the
system and a damping force. In section 3.2 of this chapter, the passive eddy current damper
utilizing a single permanent magnet will be experimentally tested to both show it’s effectiveness
as a vibration damping mechanism, and to demonstrate the accuracy of the model developed in
Chapter 2.
3.2.1 Passive Eddy Current Damper Experimental Setup
In order to validate the accuracy of the model, experiments were performed on an aluminum
beam with dimensions shown in Figure 3.2. For all tests performed on the cantilever beam a
neodymium-iron-boron permanent magnet with radius and length of 6.35mm and 12.7mm,
respectively, was used. The other physical properties of the beam, conductor, and magnet are
listed in Table 3.1. When performing the validation of the model, it was necessary to include the
effect of the eddy currents generated in the aluminum beam, because of its high conductivity.
Figure 3.2: Schematic showing the dimensions of the beam.

66
Table 3.1: Physical properties of the beam, conductor, and magnet.
Property Value
Young’s modulus of beam 75 GPa
Density of beam 2700 kg/m3
Conductivity of beam 3.82 x 107 mho/m
Thickness of beam 3.23 mm
Thickness of copper conductor 0.62 mm
Conductivity of copper conductor 5.80 x 107 mho/m
Permanent magnet composition NdFeB 35
Residual magnetic Flux of magnet 1.21 kGauss
The goal of these experiments was to measure the damping of the beam as a function of the
gap between the copper conducting plate and the surface of the permanent magnet. To do this,
both the response to an initial displacement and the frequency response were measured. From
these two tests the damping of the beam can be calculated by determining the log decrement of
the initial condition response and applying the unified matrix polynomial approach (UMPA)
(Allemang and Brown, 1998) to the frequency response. It was necessary to find the damping
using both of these methods because significant damping is added when the magnet is placed in
close proximity to the beam, making the damping measurement difficult.
In order to accurately measure the damping of the aluminum beam using the log decrement,
the initial condition must be consistent throughout all tests. This is necessitated further due to the
need to measure the damping for numerous different gap distances between the magnet and
conducting plate. Therefore to ensure that the initial displacement was consistent throughout
every test, a 0.858g steel plate (46mm long, 19mm wide and 0.0765mm thick) was attached to the
beam and an electromagnet was positioned at a fixed distance from the beam and steel plate. A
small switch was constructed to allow the magnet to be activated and thus pull the steel plate into
contact with the surface of the electromagnet and provide a fixed initial displacement. When the
switch was turned off the electromagnet releases the beam allowing it go into free vibration and
damp out, this system can be seen in Figure 3.3. Once the beam is set into motion, a Polytec laser
vibrometer was used to measure the displacement of the beam.

67
Figure 3.3: Experimental setup of the aluminum beam and eddy current damper.
To measure the frequency response of the aluminum beam, a piezoelectric patch was attached
at the root of the beam as an excitation source, while the beam’s response was measured using a
Polytec laser vibrometer. With the two excitation systems developed (initial condition and
piezoelectric induced disturbance), the next step was to construct an accurate method of
positioning the permanent magnet a fixed distance from the conducting plate. To allow the
position of the magnet to be accurately varied, it was bonded to a wooden block that was fixed to
a lead screw, as sown in Figure 3.3. A wooden block was used such that the magnetic field was
not distorted due to high permeability materials in close proximity to the magnet. The
combination of a lead screw for positioning, an electromagnet for consistent initial displacement,
a permanently bonded piezoelectric patch and a non-contact sensing system, (laser vibrometer)
allowed every test to be precisely repeated.
.
Electromagnet
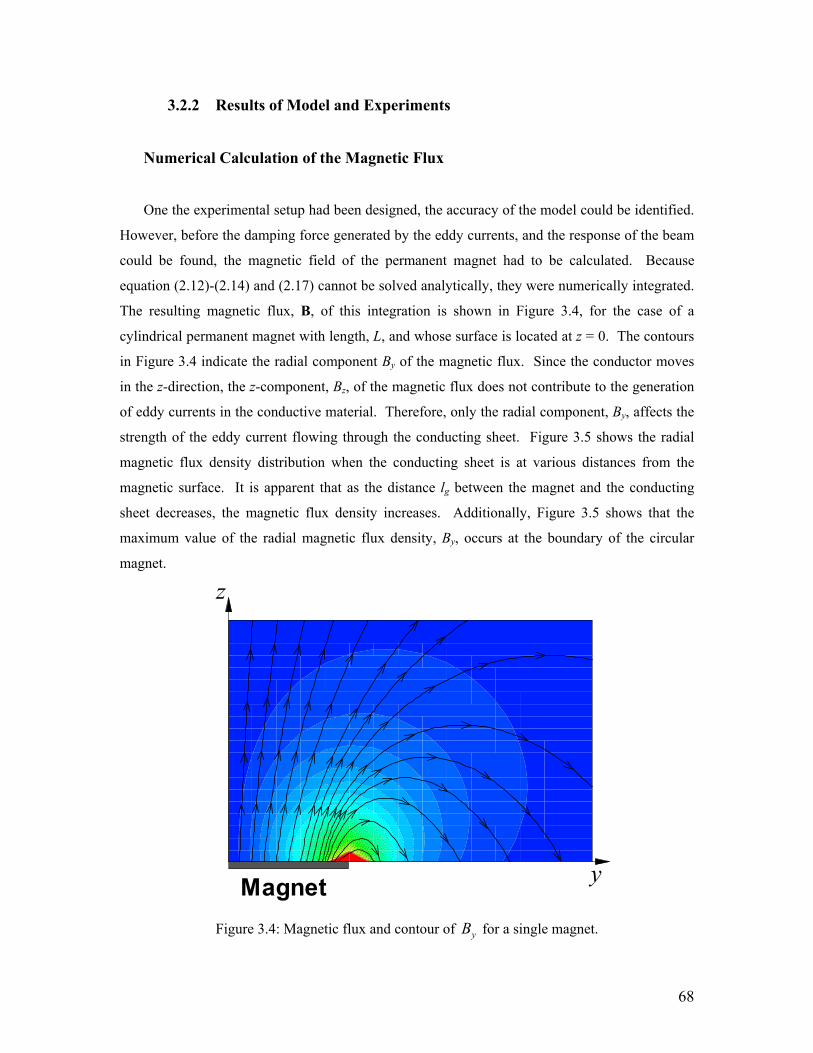
68
3.2.2 Results of Model and Experiments
Numerical Calculation of the Magnetic Flux
One the experimental setup had been designed, the accuracy of the model could be identified.
However, before the damping force generated by the eddy currents, and the response of the beam
could be found, the magnetic field of the permanent magnet had to be calculated. Because
equation (2.12)-(2.14) and (2.17) cannot be solved analytically, they were numerically integrated.
The resulting magnetic flux, B, of this integration is shown in Figure 3.4, for the case of a
cylindrical permanent magnet with length, L, and whose surface is located at z = 0. The contours
in Figure 3.4 indicate the radial component By of the magnetic flux. Since the conductor moves
in the z-direction, the z-component, Bz, of the magnetic flux does not contribute to the generation
of eddy currents in the conductive material. Therefore, only the radial component, By, affects the
strength of the eddy current flowing through the conducting sheet. Figure 3.5 shows the radial
magnetic flux density distribution when the conducting sheet is at various distances from the
magnetic surface. It is apparent that as the distance lg between the magnet and the conducting
sheet decreases, the magnetic flux density increases. Additionally, Figure 3.5 shows that the
maximum value of the radial magnetic flux density, By, occurs at the boundary of the circular
magnet.
Magnet y
z
Figure 3.4: Magnetic flux and contour of yB for a single magnet.
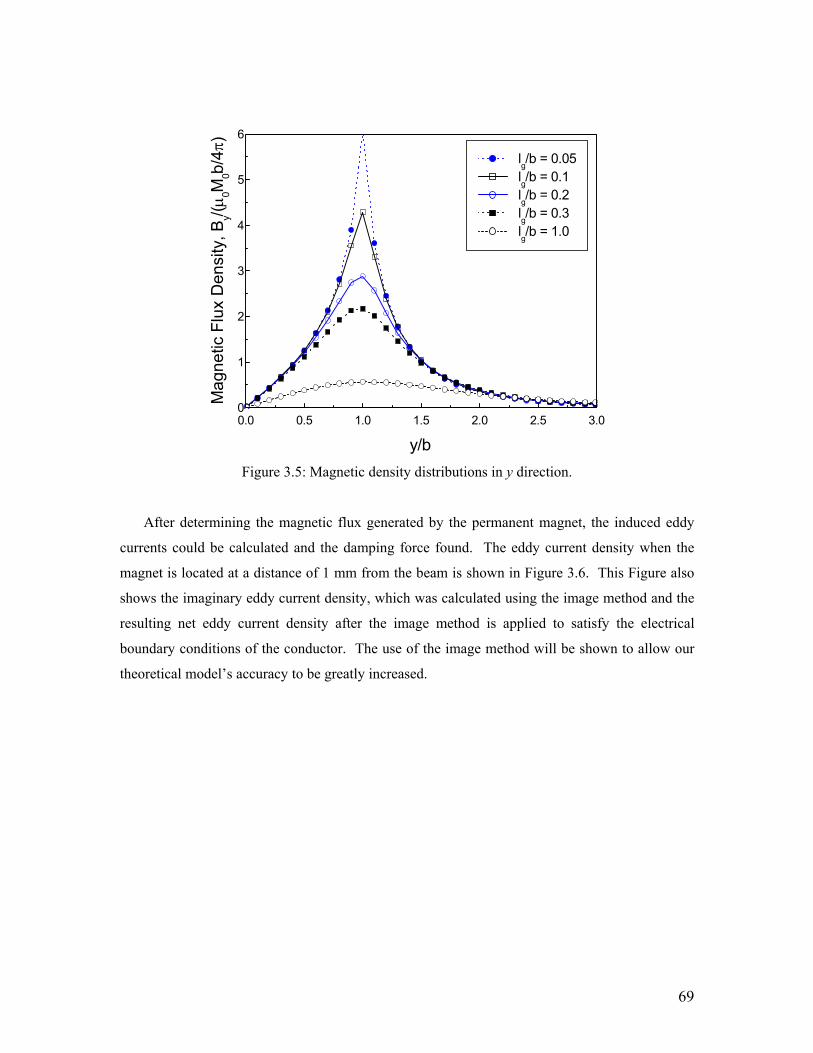
69
0.0 0.5 1.0 1.5 2.0 2.5 3.00
1
2
3
4
5
6
lg/b = 0.05 lg/b = 0.1 lg/b = 0.2 lg/b = 0.3 lg/b = 1.0
Mag
netic
Flu
x D
ensi
ty, B
y/(µ 0M
0b/4π)
y/b Figure 3.5: Magnetic density distributions in y direction.
After determining the magnetic flux generated by the permanent magnet, the induced eddy
currents could be calculated and the damping force found. The eddy current density when the
magnet is located at a distance of 1 mm from the beam is shown in Figure 3.6. This Figure also
shows the imaginary eddy current density, which was calculated using the image method and the
resulting net eddy current density after the image method is applied to satisfy the electrical
boundary conditions of the conductor. The use of the image method will be shown to allow our
theoretical model’s accuracy to be greatly increased.
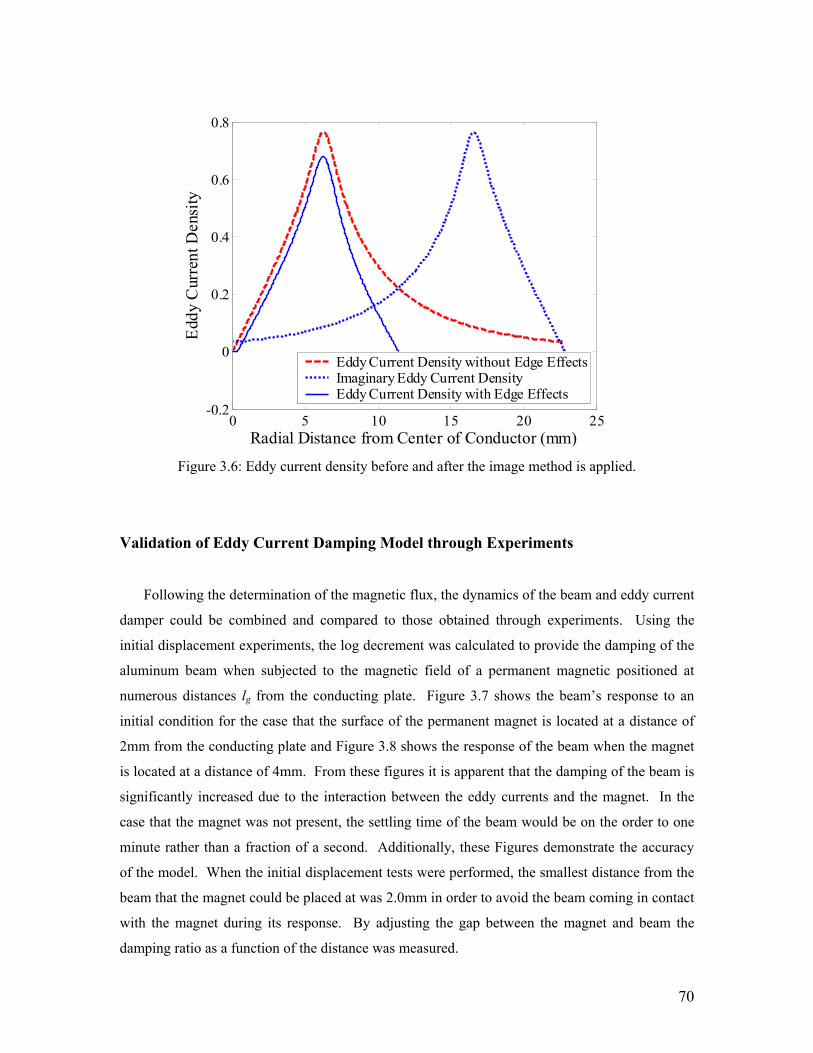
70
0 5 10 15 20 25-0.2
0
0.2
0.4
0.6
0.8
Radial Distance from Center of Conductor (mm)
Eddy
Cur
rent
Den
sity
Eddy Current Density without Edge EffectsImaginary Eddy Current DensityEddy Current Density with Edge Effects
Figure 3.6: Eddy current density before and after the image method is applied.
Validation of Eddy Current Damping Model through Experiments
Following the determination of the magnetic flux, the dynamics of the beam and eddy current
damper could be combined and compared to those obtained through experiments. Using the
initial displacement experiments, the log decrement was calculated to provide the damping of the
aluminum beam when subjected to the magnetic field of a permanent magnetic positioned at
numerous distances lg from the conducting plate. Figure 3.7 shows the beam’s response to an
initial condition for the case that the surface of the permanent magnet is located at a distance of
2mm from the conducting plate and Figure 3.8 shows the response of the beam when the magnet
is located at a distance of 4mm. From these figures it is apparent that the damping of the beam is
significantly increased due to the interaction between the eddy currents and the magnet. In the
case that the magnet was not present, the settling time of the beam would be on the order to one
minute rather than a fraction of a second. Additionally, these Figures demonstrate the accuracy
of the model. When the initial displacement tests were performed, the smallest distance from the
beam that the magnet could be placed at was 2.0mm in order to avoid the beam coming in contact
with the magnet during its response. By adjusting the gap between the magnet and beam the
damping ratio as a function of the distance was measured.
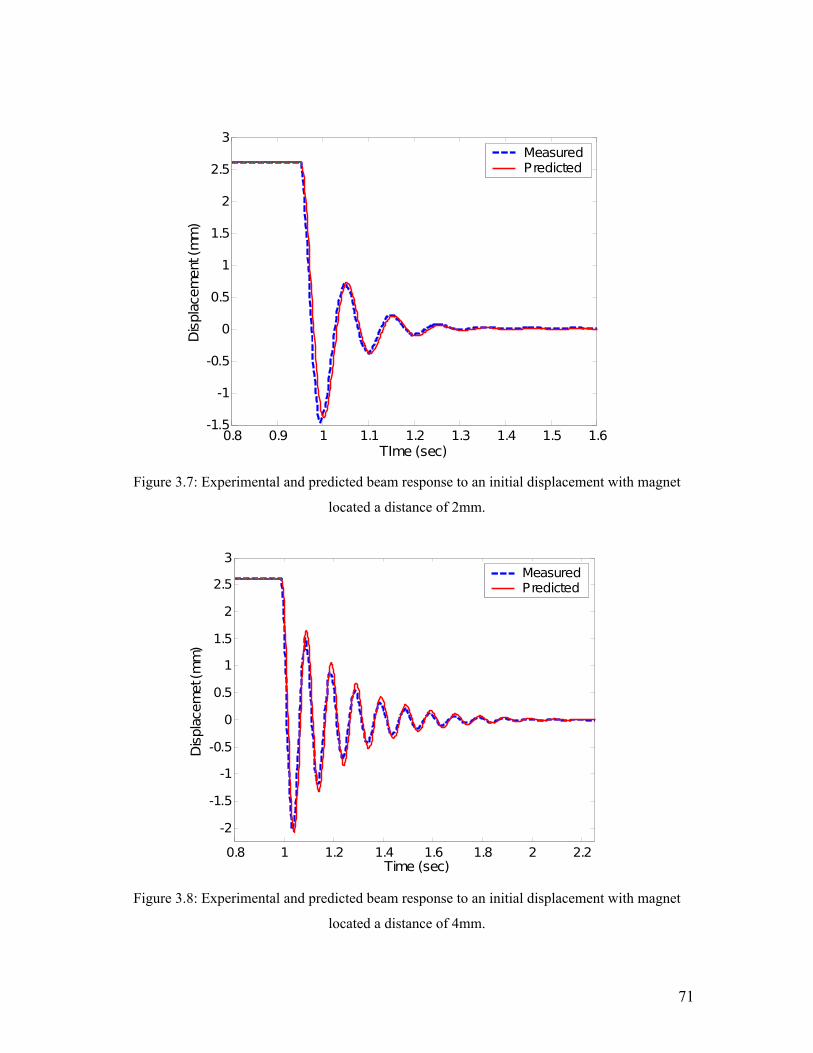
71
0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
TIme (sec)
Dis
plac
emen
t (m
m)
MeasuredPredicted
Figure 3.7: Experimental and predicted beam response to an initial displacement with magnet
located a distance of 2mm.
0.8 1 1.2 1.4 1.6 1.8 2 2.2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
Dis
plac
emet
(m
m)
MeasuredPredicted
Time (sec)
Figure 3.8: Experimental and predicted beam response to an initial displacement with magnet
located a distance of 4mm.

72
Furthermore, to demonstrate the effectiveness of this non-contacting magnetic damper for the
suppression of the transverse vibrations of a beam, experiments were performed to determine the
frequency response before and after placement of the magnet, the results of this test are shown in
Figure 3.9. This Figure shows that the first mode of vibration is significantly reduced by
approximately 42.4 dB and the second and third mode are suppressed by 21.9 dB and 14.3 dB,
respectively. The frequency response of the beam was determined for various gaps between the
magnet and beam ranging from 1mm to 10mm so that the model’s accuracy could be
demonstrated. Figure 3.10 shows the experimental and predicted frequency response of the beam
for the case that the magnet located 2mm from the beam. From this figure it is apparent that the
dynamics of the beam are well characterized by the model. Using the experimental results, the
damping of the beam as the distance between the magnet and beam was increased was calculated
using the UMPA method. The damping ratio measured from the initial displacement tests and
frequency response experiments are compared to the predicted damping ratio of the beam that
was identified using the force calculated in equations (2.14) and (2.17). For the beam’s first
mode of vibration, these comparisons are shown in Figure 3.11. Figure 3.11 shows three curves
for the predicted damping ratio, the infinite conductor curve represents the damping that would be
expected if the conducting plate was of infinite dimensions and corresponds to setting rc in
equation (2.14) and (2.17) equal to infinity and the second curve defines the damping ratio
resulting in the case that the conductor is of the finite size used in the experiments. The third case
shows the results when the image method is used to satisfy the eddy current density at the
boundary of the conductor as described in section 2.2.3. It can be seen that the model provides an
accurate estimate of the damping ratio, and as the distance increases, the model converges to the
measured damping of the beam. Furthermore, it can be seen that when the image method is used,
the model becomes more accurate in the range from 1mm to 5mm. The average accuracy of the
predicted value of damping over the entire range of magnet gaps tests is approximately 13%. The
experimental and predicted damping ratios for the second through the fourth mode are shown in
Figures 3.12 – 3.14. These figures show that the predicted damping ratio remains accurate when
applied to higher modes.

73
0 50 100 150 200 250-60
-50
-40
-30
-20
-10
0
10
20
Frequency (Hz)
Mag
nitu
de (d
B)
DampedUndamped
Figure 3.9: Experimentally measured damped and undamped frequency response of the beam.
0 50 100 150 200 250 300 350 400-60
-50
-40
-30
-20
-10
0
Frequncy (Hz)
Mag
nitu
de (dB
)
P redictedMeasured
Figure 3.10: Predicted and experimentally measured frequency response of the beam with the
magnet at a distance of 2mm.
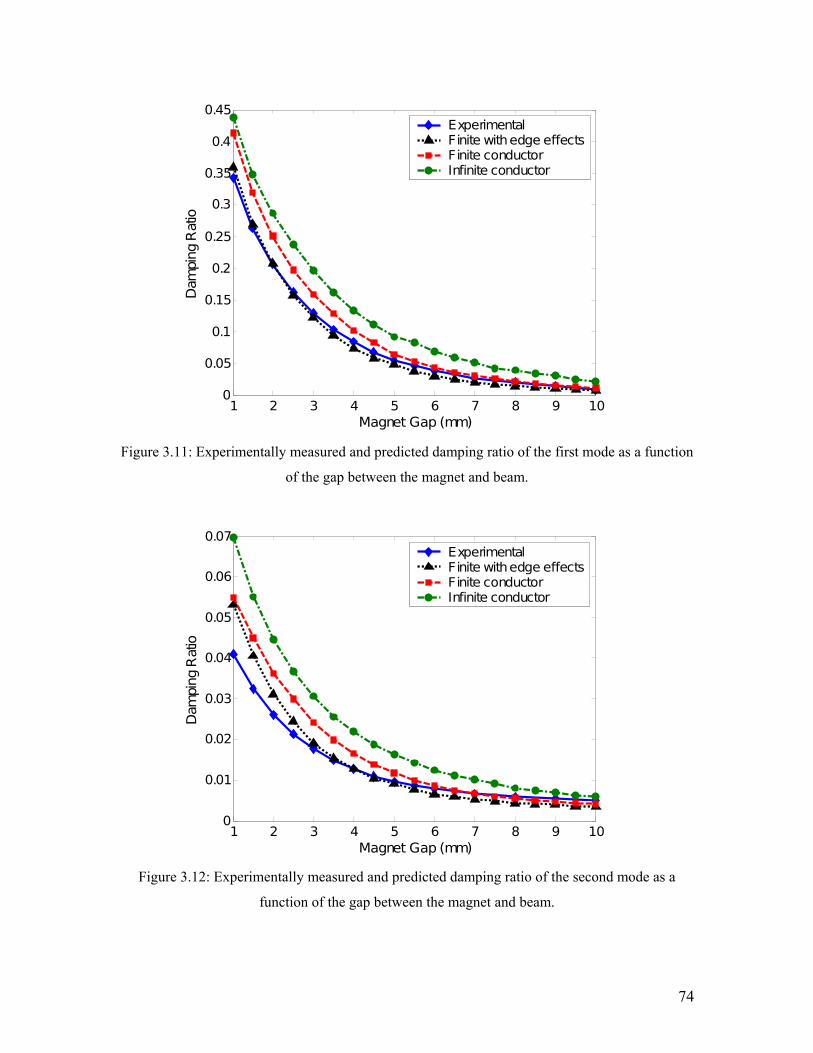
74
1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Magnet Gap (mm)
Dam
ping
Rat
io
ExperimentalFinite with edge effectsFinite conductorInfinite conductor
Figure 3.11: Experimentally measured and predicted damping ratio of the first mode as a function
of the gap between the magnet and beam.
1 2 3 4 5 6 7 8 9 100
0.01
0.02
0.03
0.04
0.05
0.06
0.07
Magnet Gap (mm)
Dam
ping
Rat
io
ExperimentalFinite with edge effectsFinite conductorInfinite conductor
Figure 3.12: Experimentally measured and predicted damping ratio of the second mode as a
function of the gap between the magnet and beam.
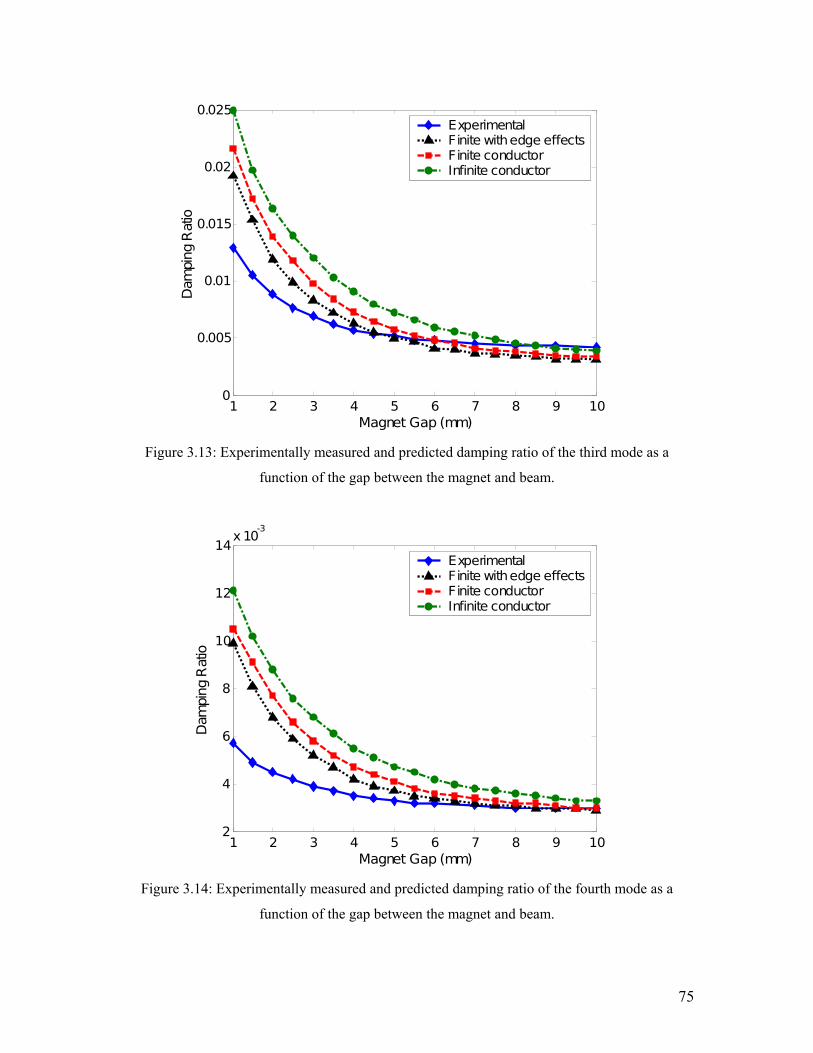
75
1 2 3 4 5 6 7 8 9 100
0.005
0.01
0.015
0.02
0.025
Magnet Gap (mm)
Dam
ping
Rat
io
ExperimentalFinite with edge effectsFinite conductorInfinite conductor
Figure 3.13: Experimentally measured and predicted damping ratio of the third mode as a
function of the gap between the magnet and beam.
1 2 3 4 5 6 7 8 9 102
4
6
8
10
12
14x 10
-3
Magnet Gap (mm)
Dam
ping
Rat
io
ExperimentalFinite with edge effectsFinite conductorInfinite conductor
Figure 3.14: Experimentally measured and predicted damping ratio of the fourth mode as a
function of the gap between the magnet and beam.

76
3.3 Experimental Testing and Results of the Improved
Passive Eddy Current Damper Concept
The derivation of the eddy current density performed in chapter 2 showed that the generation of
eddy currents was due to the radial magnetic flux of the permanent magnet. Using this idea it is
realized that when a permanent magnet is brought into close proximity with a second magnet of
the same polarity, the magnetic field is compressed in the poling direction. The compression of
the magnetic field results in an increase in the radial magnetic flux as shown in Figure 3.1. Due
to this increased magnetic flux in the radial direction, the use of a second magnet causes the
damping force to be significantly higher than the use of a single magnet. Additionally, when a
second magnet is incorporated into the design the system, the damping effect becomes more
linear than with a single magnet. This occurs because the flux on both sides of the beam is equal
the beam’s motion in each direction results in an equal generation of eddy currents and damping
force, where as with a single magnet, significantly more force results from motion in one
direction as the other. Using this concept and the superposition of the magnetic fields developed
in chapter 2, the following section will perform experiments on a cantilever beam to show the
increased damping effect and the accuracy of the modeling techniques when used to predict the
damping added to the structure.
3.3.1 Passive Eddy Current Damper Experimental Setup
Similar to the experiments performed in the previous section, the improved eddy current
damping concept was experimentally tested on a cantilever beam to identify the accuracy and
versatility of the modeling techniques developed in predicting the damping when a second
magnetic is incorporated into the system. Furthermore, the experiments performed will show the
improved performance of this damper. The dimensions of the cantilever beam were left the same
as those used in the previous section and shown in Figure 3.2, in order to allow a comparison
between the use of a single and two magnets to be made. The experiments used two neodymium-
iron-boron (NdFeB) permanent magnets with radius and length of 6.35mm and 12.7mm,
respectively. Other relevant properties of the beam and magnet are shown in Table 3.1. When
predicting the damping added to the structure, it was necessary to include the effect of the highly
conductor aluminum beam in the analysis.

77
To show the accuracy of the model, and performance of the damper, the damping ratio of the
beam was measured as the gap between the face of the magnet and the surface of the conductor
was varied. The improved concept utilizes two permanent magnets positioned on opposite sides
of the beam rather than a single magnet. The two magnets were configured such that the same
magnetic poles were facing each other causing a repulsive force between the magnets and causing
the magnetic flux to be compressed along the poling axis of the magnet. The compression of the
magnetic flux in this way causes its magnitude in the radial direction to be substantially increased
and thus the damping force is enhanced. The layout of the magnets is shown in Fig. 3.15.
Figure 3.15: Experimental setup showing position of magnets and conducting plates.
To measure the damping ratio of the beam as the distance between the magnet and the
conductor is varied, the frequency response was measured. The beam was excited using a
piezoelectric patch mounted at the root of the beam and the displacement response at the tip of
the beam was recorded using a Polytec Laser vibrometer. Once the frequency response of the
system was determined the UMPA was applied to the frequency response allowing the damping
ratio of the system to be extracted.

78
Additionally, experiments were performed to measure the time response of the system with
various gap distances. The time response of the system to an initial displacement was measured
as another means of identifying the amount of damping in the system and to demonstrate the
increased settling time due to the eddy currents. The initial displacement condition was applied
through an electromagnet that when turned on would attract the beam, and when turned off would
allow it to be released and vibrate freely. Because aluminum is not ferromagnetic, a 0.858g steel
plate (46mm long, 19mm wide and 0.0765mm thick) steel plate was attached to the side of the
beam allowing the beam and electromagnet to interact. This system allowed a constant initial
displacement to be repeatedly applied over numerous tests and can be seen in Figure 3.15.
3.3.2 Results of Model and Experiments
Numerical Calculation of the Magnetic Flux
To determine the damping force induced on the beam, the magnetic flux B must first be
calculated. However, the integration of equations (2.12) – (2.14) and (2.17) that describes the
magnetic flux and damping force, cannot be solved analytically and therefore a numerical method
was used to obtain the solution. The resulting magnetic flux for the improved eddy current
damper that utilizes two magnets is shown in Figure 3.16. This Figure shows the magnetic flux
lines with the contours that represent the magnitude of the magnetic flux in the radial direction By.
The compression of the magnetic flux in the poling direction can be seen in this figure and is
quite noticeable when compared to the magnetic flux lines of a single magnetic shown in Figure
3.4. Figure 3.17 shows the magnet flux density in the radial direction By for the case that a single
permanent magnet is used and for the case of two magnets, which is considered in this section.
From Figure 3.17 it is apparent that the radial magnetic flux is enhanced due to the use of a
second magnet.
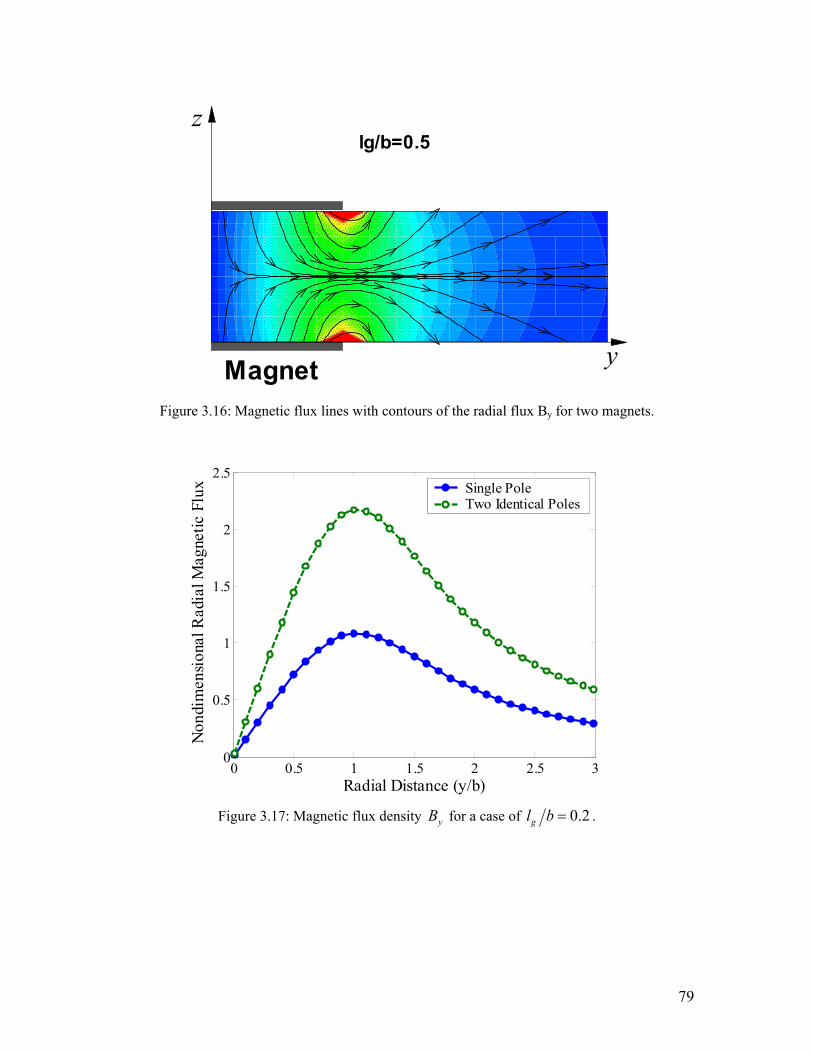
79
Magnet y
zlg/b=0.5
Figure 3.16: Magnetic flux lines with contours of the radial flux By for two magnets.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
Radial Distance (y/b)
Non
dim
ensio
nal R
adia
l Mag
netic
Flu
x Single PoleTwo Identical Poles
Figure 3.17: Magnetic flux density yB for a case of 0.2gl b = .

80
Validation of Model through Experiments
Validation of the enhanced eddy damper model is performed by measuring the damping ratio
predicted by the model and the damping ratio measured in experiments. The performance of the
improved eddy current damper can be demonstrated by looking at the magnitude of the frequency
response function and the beam’s settling time to an initial displacement. In order to obtain the
damping ratio from the experimental data, the UMPA method was applied to the frequency
response. However, when performing the experiments it was found that the damping ratio of the
first mode was overdamped for the case that the magnets were in close proximity to the beam.
Therefore, in this gap range the time response of the beam when subjected to an initial
displacement was measured, thus allowing the log decrement to be calculated. One
experimentally obtained frequency response of the system before and after placement of both one
and two permanent magnets is shown in Figure 3.18. From this Figure it is apparent that the
damping of the structure is significantly increased after addition of the magnets into the system.
Additionally, the use of two magnets provides significantly more vibration reduction than when
one magnet is used. When two magnets are used and located 1mm from the conductor, the first
mode is overdamped and the magnitude is suppressed by approximately 54dB, the reduction in
the magnitude of the second, third and fourth modes are 31dB, 22.5dB and 14dB, respectively,
whereas when one magnet was used, the reduction in magnitude of the first, second and third
modes was 42.4dB, 21.9dB and 14.3dB, respectively. Furthermore, since this eddy current
damper does not contact the structure, significant damping can be added without changing the
dynamic response of the system, as can be seen in Figure 3.18. If other passive damping methods
such as constrained layer damping were to be used, the response of the structure would be
considerably altered due to a change in the mass and stiffness of the structure. The increased
damping through the use of two magnets can also be seen in Figure 3.19, which shows the time
response of the beam subjected to an initial displacement when one and two magnets are located a
distance of 2.5mm. These results indicate the advantage of using the new damper configuration
developed in this section for the suppression of transverse beam vibrations.

81
0 50 100 150 200 250 300 350 400-70
-60
-50
-40
-30
-20
-10
0
10
20
Frequency (Hz)
Mag
nitu
de (d
B)
UndampedDamped with two magnetsDamped with one magnet
Fig. 3.18: Experimentally obtained frequency response of the system before and after placement
of the magnets a distance of 1mm.
1.3 1.4 1.5 1.6 1.7 1.8 1.9 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Time (sec)
Dis
plac
emen
t (m
m)
Two MagnetsOne Magnet
Figure 3.19: Time response of the beam to an initial displacement when one and two magnets are
present at a distance of 2.5mm from the conductor.
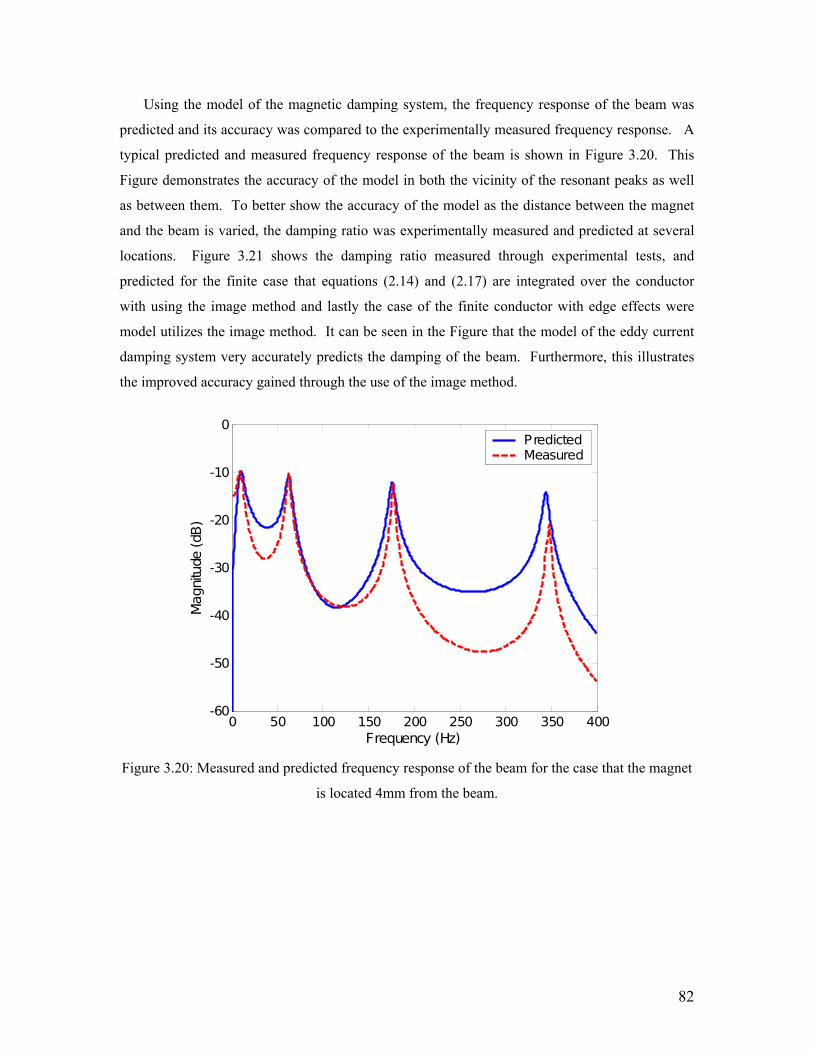
82
Using the model of the magnetic damping system, the frequency response of the beam was
predicted and its accuracy was compared to the experimentally measured frequency response. A
typical predicted and measured frequency response of the beam is shown in Figure 3.20. This
Figure demonstrates the accuracy of the model in both the vicinity of the resonant peaks as well
as between them. To better show the accuracy of the model as the distance between the magnet
and the beam is varied, the damping ratio was experimentally measured and predicted at several
locations. Figure 3.21 shows the damping ratio measured through experimental tests, and
predicted for the finite case that equations (2.14) and (2.17) are integrated over the conductor
with using the image method and lastly the case of the finite conductor with edge effects were
model utilizes the image method. It can be seen in the Figure that the model of the eddy current
damping system very accurately predicts the damping of the beam. Furthermore, this illustrates
the improved accuracy gained through the use of the image method.
0 50 100 150 200 250 300 350 400-60
-50
-40
-30
-20
-10
0
Frequency (Hz)
Mag
nitu
de (dB
)
P redictedMeasured
Figure 3.20: Measured and predicted frequency response of the beam for the case that the magnet
is located 4mm from the beam.
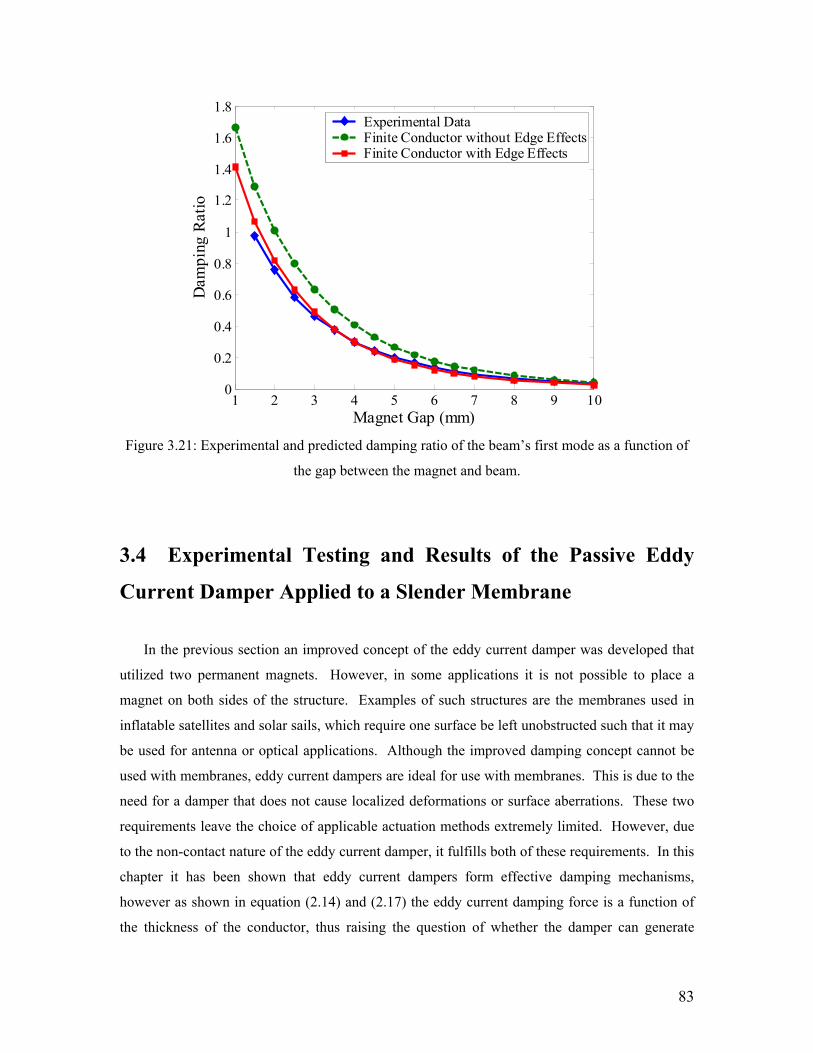
83
1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Magnet Gap (mm)
Dam
ping
Rat
io
Experimental DataFinite Conductor without Edge EffectsFinite Conductor with Edge Effects
Figure 3.21: Experimental and predicted damping ratio of the beam’s first mode as a function of
the gap between the magnet and beam.
3.4 Experimental Testing and Results of the Passive Eddy
Current Damper Applied to a Slender Membrane
In the previous section an improved concept of the eddy current damper was developed that
utilized two permanent magnets. However, in some applications it is not possible to place a
magnet on both sides of the structure. Examples of such structures are the membranes used in
inflatable satellites and solar sails, which require one surface be left unobstructed such that it may
be used for antenna or optical applications. Although the improved damping concept cannot be
used with membranes, eddy current dampers are ideal for use with membranes. This is due to the
need for a damper that does not cause localized deformations or surface aberrations. These two
requirements leave the choice of applicable actuation methods extremely limited. However, due
to the non-contact nature of the eddy current damper, it fulfills both of these requirements. In this
chapter it has been shown that eddy current dampers form effective damping mechanisms,
however as shown in equation (2.14) and (2.17) the eddy current damping force is a function of
the thickness of the conductor, thus raising the question of whether the damper can generate
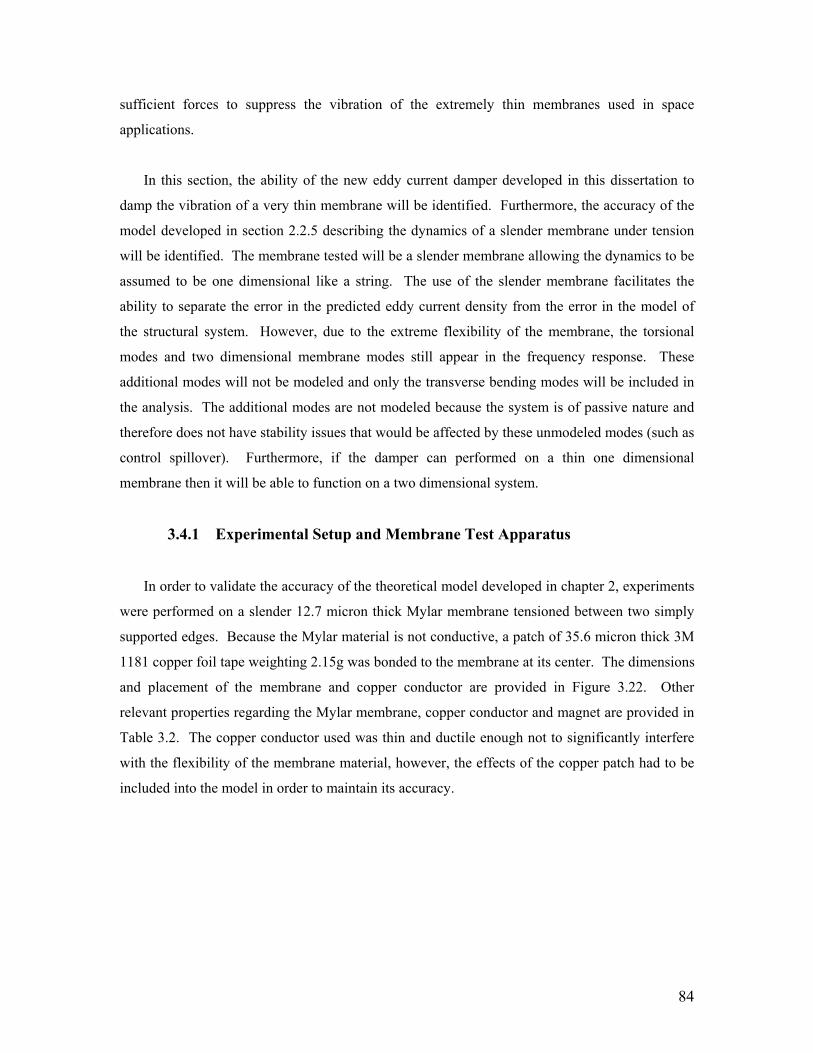
84
sufficient forces to suppress the vibration of the extremely thin membranes used in space
applications.
In this section, the ability of the new eddy current damper developed in this dissertation to
damp the vibration of a very thin membrane will be identified. Furthermore, the accuracy of the
model developed in section 2.2.5 describing the dynamics of a slender membrane under tension
will be identified. The membrane tested will be a slender membrane allowing the dynamics to be
assumed to be one dimensional like a string. The use of the slender membrane facilitates the
ability to separate the error in the predicted eddy current density from the error in the model of
the structural system. However, due to the extreme flexibility of the membrane, the torsional
modes and two dimensional membrane modes still appear in the frequency response. These
additional modes will not be modeled and only the transverse bending modes will be included in
the analysis. The additional modes are not modeled because the system is of passive nature and
therefore does not have stability issues that would be affected by these unmodeled modes (such as
control spillover). Furthermore, if the damper can performed on a thin one dimensional
membrane then it will be able to function on a two dimensional system.
3.4.1 Experimental Setup and Membrane Test Apparatus
In order to validate the accuracy of the theoretical model developed in chapter 2, experiments
were performed on a slender 12.7 micron thick Mylar membrane tensioned between two simply
supported edges. Because the Mylar material is not conductive, a patch of 35.6 micron thick 3M
1181 copper foil tape weighting 2.15g was bonded to the membrane at its center. The dimensions
and placement of the membrane and copper conductor are provided in Figure 3.22. Other
relevant properties regarding the Mylar membrane, copper conductor and magnet are provided in
Table 3.2. The copper conductor used was thin and ductile enough not to significantly interfere
with the flexibility of the membrane material, however, the effects of the copper patch had to be
included into the model in order to maintain its accuracy.

85
Figure 3.22: Dimensions of membrane strip and location of copper conductor.
Table 3.2: Physical properties of the beam, conductor and magnet.
Property Value
Young’s modulus of Mylar membrane 4.7 GPa
Density of Mylar membrane 1390 kg/m3
Young’s modulus of copper conductor 131 x 107 mho/m
Density of copper conductor 8910 kg/m3
Conductivity of copper conductor 1. 052 x 107 mho/m
Permanent magnet composition NdFeB 45
Residual magnetic flux of magnet 1.35 kGauss
The goals of the experiments performed in this study are to identify the damping ratio and
frequency response of the slender membrane subjected to an axial load when at vacuum and
ambient pressure. However, experimentally testing a membrane structure is very difficult due to
the limited choice of sensing and actuation methods, wrinkling, modal coupling and the
sensitivity to both boundary conditions and air currents. The boundary conditions of the
membrane are chosen to be pinned in order to maintain constant eigenfunctions as axial tension is
applied (Shaker, 1975). The pinned boundary conditions were constructed by clamping the edge
of the membrane strip between two 6.35 mm diameter steel rods, similar to the clamps used by
Hall et al. (2002). The axial load was applied to the membrane by attaching one of the pinned
boundary conditions to a Velmex unislide lead screw, while the other pinned boundary condition
was fixed to a Transducer Techniques MLP-75 load cell that measured the force applied to the
membrane by the lead screw, as shown in Figure 3.23. By monitoring the load cell reading and
adjusting the lead screw, the tension in the membrane could be accurately set. Due to the very
high flexibility of the membrane, both sensing and actuation techniques must be carefully chosen.
86
After trying several actuation schemes, it was determined that the best method would be to attach
the entire test fixture to a shaker and let the inertia of the membrane excite itself, as shown in
Figure 3.23. Sensing was performed using a Polytec laser vibrometer because it did not contact
the structure during measurements. The last portion of the experimental setup is the positioning
mechanism for the permanent magnet. To allow the magnets position to be accurately varied, the
magnet was bonded to a wooden block that was then fixed to a Velmex lead screw, as shown in
Figure 3.23. The magnet was fixed to a wooded block rather than a metal block to reduce
interference with the magnetic flux.
Figure 3.23: Experimental setup used to determine the damping effect of the permanent magnet
as the distance form the conductor is varied.
Experiments were performed both at ambient and vacuum pressure to determine how the
performance of the eddy current damper varied and if it would be functional in space. During
ambient testing the membrane was simply excited in a laboratory environment but for vacuum
testing the entire test setup was placed in a Tenahy 2m vacuum chamber as shown in Figure 3.24.
During testing the chamber was reduced to zero torr before experiments were performed. The
only change that needed to be made to the test setup when placed in the vacuum chamber was to
replace the wooded block that the magnet was bonded to with a high density plastic. This was

87
required because as the air was removed from the chamber the moisture in the wooden block was
also removed causing the block to shrink. The vacuum chamber had a glass window that allowed
the laser vibrometer to be used for measuring the membranes vibration. It was found through
experiments that the glass window did not affect the quality of the measured data, but rather, the
data’s quality was actually improved due to the isolation from air currents in the chamber.
Figure 3.24: Experimental setup in the vacuum chamber.
3.4.2 Results of the Model and Experiments
The scope of this research is to show the ability of the passive eddy current damping system
developed in this dissertation to add significant damping to a thin membrane structure and
develop an accurate model of the damping mechanism’s interaction with the membrane. The
ability of the eddy current damping system to add damping into the structure is shown by
measuring the frequency response before and after placement of the magnet. Figure 3.25, shows
the frequency response of the membrane when the eddy current damper is not present in the
system and for the case that the magnet is located a distance of 1mm from the membrane’s
surface. To help identify the modes shown in Figure 3.25, the frequencies are labeled B1 for the
first bending mode, B2 for the second bending, T1 for the first torsional and so on. Additionally,
Table 3.3 provides the frequencies of each of the first four bending modes and the first three
torsional modes when the membrane is at both ambient and vacuum pressure. The frequencies
presented in Table 3.3 were identified by performing a modal analysis on the structure. It can be
seen from Figure 3.25 that the damper provides significant damping to the membrane, reducing
the magnitude of the first bending mode by 13.7 dB and the third bending mode by 5.2 dB. The

88
second and fourth bending modes do not show any additional damping because the magnet is
located at the center of the membrane strip which is a nodal point for these modes.
0 50 100 150 200 250 300 350-30
-25
-20
-15
-10
-5
0
5
10
Frequency (Hz)
Mag
nitu
de (dB
)DampedUndamped
B1
B2
T1
T2 T3
B3
B4
Figure 3.25: Measured frequency response without magnet and with magnet a distance of 1mm
from membrane at ambient pressure.
Table 3.3: Bending and torsional natural frequencies of the membrane with a tension of 8.9N at
both vacuum and ambient pressure.
Mode Shape Ambient Pressure Vacuum Pressure
First Bending (B1) 62 Hz 71.7 Hz
First Torsional (T1) 88.5 Hz 157 Hz
Second Bending (B2) 154 Hz 194.5 Hz
Second Torsion (T2) 178 Hz 212 Hz
Third Bending (B3) 205.8 Hz 242.5 Hz
Third Torsion (T3) 249 Hz 326 Hz
Fourth Bending (B4) 307.5 Hz 379.7 Hz
During tests on the membrane at vacuum conditions it was found that the eddy current
damping system reduces the magnitude of the response better than at ambient conditions. The

89
frequency response of the membrane when the damping mechanism was not present and when the
magnet is located 1mm from the surface of the membrane is shown in Figure 3.26. From the
figure it can be seen that the magnitude of the first bending mode is reduced by 31.06 dB and the
third bending mode by 15.62 dB. As with the ambient tests the second and forth bending
frequencies are not damped by the magnet because it is located at a nodal point of the modes.
Additionally, a slight shift occurs in the second and fourth mode due to the hygroscopic effects of
the polymer which will be discussed later.
0 50 100 150 200 250 300 350 400 450-50
-40
-30
-20
-10
0
10
20
Frequency (Hz)
Mag
nitu
de (dB
)
DampedUndamped
B1
B2 B3
B4
Figure 3.26: Measured frequency response without magnet and with magnet a distance of 1mm
from membrane at vacuum pressure and at an axial load of 8.9N.
While the damper performs well at vacuum conditions, the dynamic response of the
membrane changes fairly significantly when subjected to vacuum pressure. The change in the
frequency response of the membrane between ambient and vacuum pressure are compared in
Figure 3.27, and the shift in natural frequency for each mode can be seen in Table 3.3. The
change in dynamic response can be attributed to the hygroscopic effects of the Mylar material and
the decreased damping from the removal of air. The hygroscopic effects occur due to the
moisture in the polymer Mylar material being expelled as the pressure drops to vacuum. This
causes the polymer material to shrink and the tension applied to the membrane to increase. The
increase in tension was measured using the load cell, but the effect on other material properties

90
such the elastic modulus and density, could not be measured and therefore, could not be included
in the theoretical model of the system. For more information on the hygroscopic effect of
polymers at vacuum pressure see Bales et al. (2003). The amount of damping present in the
system was determined by applying the UMPA to the frequency response data. Using the UMPA
method, the damping ratio of the membrane system was determined for the magnet being placed
at various distances from the membrane surface in both ambient and vacuum conditions. The
resulting damping ratio of the membrane for each case is shown in Figure 3.28. As can be seen in
the figure the damping ratio maintains almost a constant offset of approximately 0.025 over the
tested range. The decrease in damping when the membrane is placed in a vacuum can be
attributed to lack of air damping which can make a significant difference in lightweight structures
such as membranes.
0 50 100 150 200 250 300 350 400 450-50
-40
-30
-20
-10
0
10
Frequency (Hz)
Mag
nitu
de (dB
)
Ambient PressureVacuum Pressure
Figure 3.27: Measured frequency response at ambient and vacuum pressure with magnet gap of
2mm and an axial load of 8.9N.

91
1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Magnet Gap (mm)
Dam
ping
Rat
io
Measured AmbientMeasured Vacuum
Figure 3.28: Measured damping ratio of membrane at both ambient and vacuum pressure with an
axial load of 8.9N.
After testing the performance of the eddy current damper at both ambient and vacuum
conditions the accuracy of the model could be validated against the measured data. Using the
model of the eddy current damping system that was been developed in chapter 2, the frequency
response of the membrane could be predicted as a function of the gap between the magnet and the
membrane surface. The predicted and measured damping ratio for the membrane at ambient
pressure for various gaps between the magnet and the membrane surface are shown in Figure
3.29. It can be seen from the figure that the model accurately predicts the damping ratio over the
entire range of gap lengths.
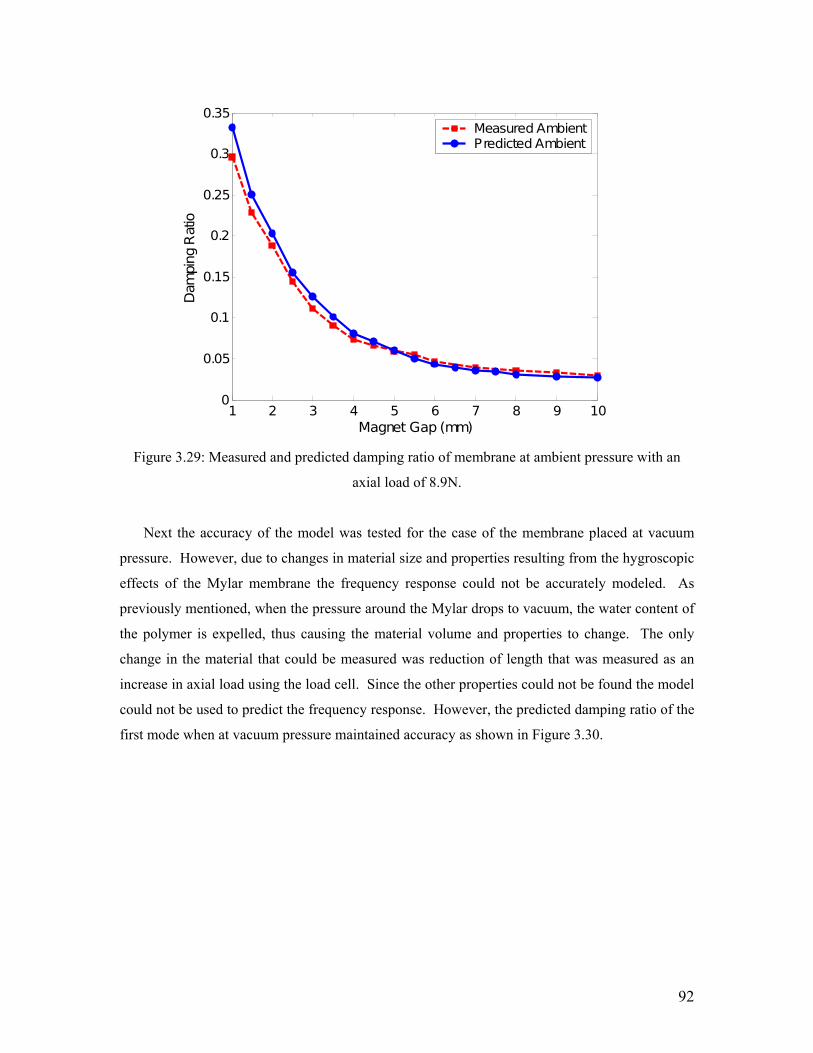
92
1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Magnet Gap (mm)
Dam
ping
Rat
io
Measured AmbientPredicted Ambient
Figure 3.29: Measured and predicted damping ratio of membrane at ambient pressure with an
axial load of 8.9N.
Next the accuracy of the model was tested for the case of the membrane placed at vacuum
pressure. However, due to changes in material size and properties resulting from the hygroscopic
effects of the Mylar membrane the frequency response could not be accurately modeled. As
previously mentioned, when the pressure around the Mylar drops to vacuum, the water content of
the polymer is expelled, thus causing the material volume and properties to change. The only
change in the material that could be measured was reduction of length that was measured as an
increase in axial load using the load cell. Since the other properties could not be found the model
could not be used to predict the frequency response. However, the predicted damping ratio of the
first mode when at vacuum pressure maintained accuracy as shown in Figure 3.30.

93
1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Magnet Gap (mm)
Dam
ping
Rat
io
Measured VacuumPredicted Vacuum
Figure 3.30: Measured and predicted damping ratio of membrane at vacuum pressure with an
axial load of 8.9N.
This damping mechanism has several advantages over other methods of applying damping to
the membrane. Because the intended use of this technology is to damp the vibrations of optical or
antenna membranes, the surface must remain flat, which limits the type of damping devices that
can be used. This point brings up one of the major advantages of this type of damping
mechanism; the damper is non-contact and therefore does not cause inconsistencies on the
membrane surface that would arise from bonding. The damper also applies a distributed force on
the surface of the membrane which is necessary to achieve global damping and avoid local
deformation. Furthermore, because the damper is non-contact it does not change the dynamic
response of the system which can be seen in Figures 3.25 and 3.26. Another advantage of this
type of damper is that it is extremely easy to install and only modifies the system damping.
Additionally, Magnetic dampers do not require any maintenance to stay functional, which is a
very important trait of any space system. For these reasons, magnetic damping mechanisms are
an excellent choice for use in space.

94
3.5 Chapter Summary
Eddy currents form an effective means of applying damping to a vibrating structure. However
they have generally been used for magnetic braking applications and those that have been aimed
at vibration suppression are typically ineffective at suppressing structural vibration, not
compatible with practical systems, or cumbersome to the structure resulting in significant mass
loading and changes to the dynamic response. To alleviate these issues, a new passive damping
mechanism has been developed. This damper functions by placing a permanent magnet a small
distance from a vibrating beam such that the beams motion is along the poling axes of the
magnet. Because the magnet does not contact the beam the damper is easy to install.
Furthermore, because the damper is non-contacting, it can be implemented without causing the
mass loading and added stiffness, which are common downfalls of other damping methods. By
avoiding mass loading and added stiffness, the damper does not change the mode shapes or
natural frequencies of the system, which is an important trait for those systems designed to have a
particular dynamic response but require additional damping after their design. The non-contact
nature of this system is also advantageous for providing damping to extremely flexible structures
such as membranes that would experience local deformations or surface irregularities if a
conventional damper were used. However, this damper has the limitation that a structure to
support the magnet must be included in the design.
The new damper configuration was theoretically modeled in chapter 2. This chapter began
by deriving the damping force, then incorporating the image method into the solution to enforce a
zero eddy current boundary condition (Lee and Park, 2002). After identifying the damping force,
the equations of motion for a beam and a slender membrane under tension were developed with
the effect of the eddy current damper included in the response. Once the theoretical models
required to predict the response of the beam had been developed, it was necessary to identify their
accuracy. Therefore, chapter 3 has developed several experiments to validate the accuracy of the
models developed in chapter 2.
First a cantilever beam was configured such that a permanent magnet was located a small
distance from a conductive patch bonded to the beam’s surface. The magnet was fixed to a lead
screw that allowed its position to be accurately changed and thus the damping ratio of the beam to
be determined as the position of the magnet is varied. The model was shown to accurately predict
the damping ratio on average with an error less than 13%. Furthermore, the use of a single

95
magnet was shown to increase the damping ratio of the first mode up to 0.35. Following the
results using a single magnet, the concept that the radial magnetic flux is responsible for the
generation of the eddy currents, which was identified in chapter 2, was used to improve the
dampers performance. By placing a second magnet on the opposite side of the beam, such that
similar poles were facing each other, the magnetic field in the radial direction could be magnified
and thus the eddy current density and damping force could be enhanced. This system was
experimentally tested and shown to match the models predictions very well, with the predicted
damping on average within 10%. Additionally, it was shown that the damping could be
significantly increased to the point that the cantilever beam’s fundamental mode of vibration
could be critically damped. The third experiment performed was on a thin slender membrane in
order to validate the ability of the eddy current damper to suppress the vibration of an extremely
thin structure. It was questionable as to the dampers performance on a thin structure because the
damping force is proportional to the thickness of the conductive material. However, it was shown
through experiments that the model accurately predicted the damping induced on the 12.7 micron
thick membrane and was able to suppress the vibration of the first mode by more than 97%.

96
Chapter 4
Development of a New Passive-Active
Magnetic Damper
4.1 Passive-Active Damper Concept
In chapters two and three, a new passive eddy current damping concept was developed and
modeled. This passive damping system functioned through the eddy currents that were formed in
the conductive beam due to its motion in a static magnetic field. As the beam vibrated in the
magnetic field, it was subjected to a time-varying magnetic flux that induced an electromotive
force (emf) causing eddy currents to form and circulate. The model developed in chapter two
showed that the density of the eddy currents, and the damping force generated, were a function of
the velocity of the beam in the magnetic field. To capitalize on this concept, this chapter will
develop a novel passive-active damping mechanism that consists of a permanent magnet which is
free to move relative to the beam. The passive component of this new system is the motion of the
beam in the static magnetic field, while an active component is added by controlling the position
of the magnet relative to the beam. By monitoring the beams motion and actively displacing the
magnet accordingly, the net velocity between the permanent magnet and the beam can be
controlled such that the damping applied to the beam can be maximized.
The passive-active nature of this system allows this damping mechanism to still be effective
as a passive device by leaving the magnet stationary. However when introducing active control
into a system, both advantages and disadvantages occur. The advantages of active control are
that specific frequencies can be targeted and vibration suppression can be achieved for various

97
types of inputs that passive damping may not be able to effectively supress (e.g. vibration
isolators typically cannot be designed for both shock and harmonic excitations). Furthermore,
increased vibration suppression can typically be achieved. The disadvantages of active control
are that additional energy must be added to the system, a sensing system must be used and some
type of analog compensator circuitry or digital computer must be used to apply control. The
answer to whether active or passive control is typically one that is not clear cut. This means that
certain design parameters must be weighted in order to determine the ideal solution for a
particular system. While not directly investigated in this dissertation, the effect that design plays
in the determination of whether an active or passive damping concept is more suited for a
structure has been considered by various authors, for instance see Huang et al. (1996) for a
comparison of active and passive constrained layer damping.
This chapter will theoretically develop a new passive-active damper that consists of a magnet
being actively displaced relative to a vibrating beam such that the eddy currents induced in the
structure and the damping force can be controlled. A second order compensator is placed in the
positive feedback loop of the system, and the closed loop transfer function will be constructed to
show the stability of the controller in a finite region of gain values. Following a theoretical
characterization of the system, an experimental study will be performed to show the accuracy of
the predicted closed loop response and to demonstrate the effectiveness of the passive-active
control mechanism. The experimental analysis will begin by tuning three parameters in the
compensator such that it can be made to control the desired frequency bands. Once the controller
is tuned the theoretical model will be compared to the results of the experiments. This
comparison will identify the validity of the assumption that the damping force is constant as the
distance from the magnet and beam changes and also verify the accuracy of the model. It will be
shown that this passive-active control is an effective method of applying non-contact control to a
vibrating structure.
4.2 Model of the Passive-Active Eddy Current Damper
A schematic of the passive-active eddy current damping system which will be developed in
this chapter is shown in Figure 4.1. The damper consists of a vibrating beam with a conductive
plate bonded to its surface and a permanent magnet fixed to an actuator which allows the magnets

98
position to be actively controlled. The eddy currents are formed due to the net velocity between
the magnet and the beam occurring from the vibration of the beam and the active control applied
to the position of the magnet. Because the motion of the beam and the magnet lie on the same
axis as the poling direction of the magnet, the radial magnetic flux is responsible for the
formation of the eddy currents in the conductive material. The eddy current damping force will
be calculated first, followed by the dynamics of the beam and the coupling of these forces into its
response. The active controller will be a second order filter that is similar to that of a positive
position feedback controller (Fanson and Caughey, 1987) with the modification that the input is a
velocity and the output is the displacement of the magnet.
Figure 4.1: Cantilever beam in magnetic field generated by permanent magnet.
4.2.1 Model of the Eddy Current Damping Force
The symmetry of the circular permanent magnet allows the surface charges to be ignored and
thus the eddy current density J induced in the conductive sheet can be written as

99
( )BvJ ×= σ (4.1)
where the ×v B term is the cross product of the velocity v of the conductor and the magnetic
flux density B defining the electromotive force driving the eddy currents J. The velocity and
magnetic flux can be written as follows
( )kjiv mb vv −++= 00 (4.2)
kjiB zyx BBB ++= (4.3)
where the velocity of the beam vb and the velocity of the magnet vm are only in the z-direction.
After substitution of equations (2) and (3) into equation (1), the eddy current density is defined by
( ) ( )( )jiBvJ xymb BBvv +−−=×= σσ (4.4)
The above equation confirms that the magnetic flux in the z-direction has no effect on the induced
eddy currents and that the induced currents are solely dependent on the x- and y-components of
the magnetic flux or the flux tangential to the face of the conducting sheet.
In order to determine the eddy current density in the conducting sheet, the magnetic flux of
the permanent magnet must be found. For the case of a cylindrical permanent magnet, the
equation defining the flux density has been derived in chapter 2, thus only the resulting equations
for the magnetic flux density of the permanent magnet will be provided. The radial and
transverse magnetic flux density due to the circular magnet of length L are written by
( ) ( ) ( )∫− ′′−′−=0
100 ,,
4,
Ly zdzzybIzzbMzyBπ
µ (4.5)
( ) ( )∫− ′′−=0
200 ,,
4,
Lz zdzzybIbMzyBπ
µ (4.6)
where 'z is the distance in the z direction from the center of a magnetized infinitesimal strip, L is

100
the length of the cylindrical magnet, b is the radius of the permanent magnet, µ0 in the
permeability of free space, M0 is the magnetization per unit length, I1 and I2 include the elliptic
integrals and are shown in Appendix A. As indicated in Fig. 3, the magnetic field distributions in
equations (4.5) and (4.6) are symmetric about the z-axis and due to the complexity of the
integrals, they must be solved numerically.
Following the identification of the magnetic flux generated by the permanent magnet, the eddy
current density can be calculated. However, in calculating the eddy current density the image
method defined in chapter 2 can be used to satisfy the boundary condition of zero eddy current
density at the conducting plate’s boundaries. By accounting for the edge effects of the conductor,
the accuracy of the predicted eddy current density will greatly increased. Only one imaginary
eddy current term is needed because the conductor is modeled as a circular plate with the same
area as the original conductor as shown in Figure 4.2. This assumption is made to simplify the
integration of equations (4.5) and (4.6). Using the process outlined in section 2.2.3 of chapter 2
the force generated due to the eddy current can be defined as
( ) ( ) ( )
( ) ( ) ( ) ⎥⎦⎤
⎢⎣⎡ −−−−=
⎥⎦⎤
⎢⎣⎡ −−−−=
×′=
∫∫
∫ ∫∫ ∫
∫
cc
cc
r
gy
r
gymb
g
r
yg
r
ymb
V
dylyAyBdylyyBvv
dydlyAyBdydlyyBvv
dV
0
2
0
2
2
0 0
22
0 0
2
,2,2
,2,
πσδ
φφσδππ
k
k
BJF
(4.7)
where δ is the thickness of the conducting sheet, rc is the equivalent radius of the conductor that
preserves its surface area and lg is the distance between the conducting sheet and the bottom on
magnet as shown in Figure 2.2. Equations (4.5)-(4.7) cannot be analytically solved for because
they result in a series of elliptic integrals. Thus a numerical integration method is used to obtain
the damping force in equation (4.7)

101
Figure 4.2: schematic showing the variables associated with the conducting plate.
4.2.2 Modeling of Cantilever Beam
The damping force calculated in equation (4.7) can now be incorporated into the dynamics of
the structure that the damper is to be applied to. For this analysis, a cantilever beam will be
studied. The equation of motion defining the dynamics of a cantilever beam were derived in
section 2.2.4 of chapter 2, and are written as
( ) ( ) ( ) ( ) ( ) ( ) ( )∫ ∑=
+=++L p
iii xtFdxxtxftrtrtr
01
, φφKCM (4.8)
where the mass matrix M, the damping matrix C, and the stiffness matrix K are defined by
( ) ( ) ( )∫==L T
ij dxxxxm0
φφρM (4.9)
( ) ( ) ( )∫ ′′′′==L T
ij dxxxxEIk0
φφK (4.10)
( )[ ][ ]eeij xcdiagc φ+== bCC (4.11)
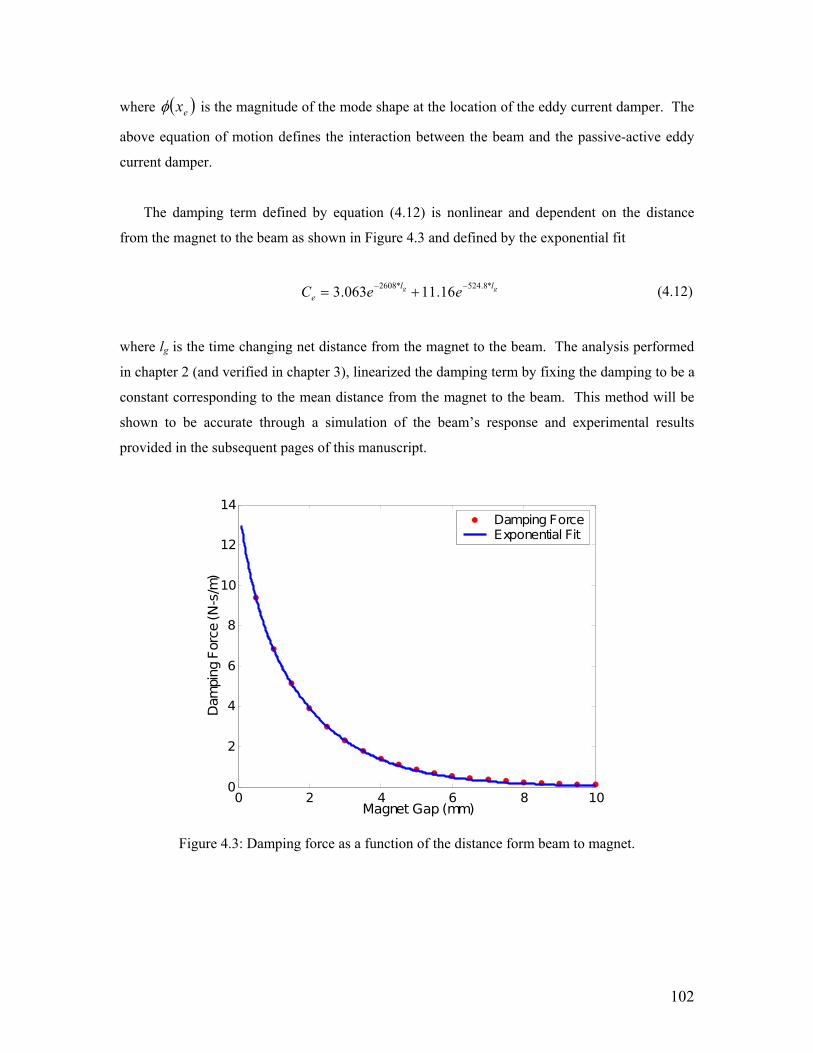
102
where ( )exφ is the magnitude of the mode shape at the location of the eddy current damper. The
above equation of motion defines the interaction between the beam and the passive-active eddy
current damper.
The damping term defined by equation (4.12) is nonlinear and dependent on the distance
from the magnet to the beam as shown in Figure 4.3 and defined by the exponential fit
gg ll
e eeC *8.524*2608 16.11063.3 −− += (4.12)
where lg is the time changing net distance from the magnet to the beam. The analysis performed
in chapter 2 (and verified in chapter 3), linearized the damping term by fixing the damping to be a
constant corresponding to the mean distance from the magnet to the beam. This method will be
shown to be accurate through a simulation of the beam’s response and experimental results
provided in the subsequent pages of this manuscript.
0 2 4 6 8 100
2
4
6
8
10
12
14
Magnet Gap (mm)
Dam
ping
For
ce (N
-s/m
)
Damping ForceExponential Fit
Figure 4.3: Damping force as a function of the distance form beam to magnet.

103
4.2.3 Controller Design
The position of magnet relative to the beam is actively controlled using a positive feedback
control law (Fanson and Caughey, 1987). The feedback controller is a second order filter with
three parameters chosen to provide the greatest vibration suppression of the frequency response.
The filter is defined by the following equation
22
2
2 fff
f
ssK
ωωζω
++ (4.13)
where K is the controller gain, ωf is the filter frequency and ζf is the filter damping ratio. The
compensator defined by equation (4.13) contains an extra zero in the numerator to account for the
dynamics of the electromagnetic actuator used to actively displace the magnet. The effective
bandwidth of the shaker is limited to approximately 100Hz due to the mass of the magnet and in
this range the velocity of the magnet attached to the tip of the shaker is accurately approximated
as the derivative of the control signal supplied to the actuator. Therefore, the input to the
controller is the velocity of the beam and the output of the controller is the velocity of the
permanent magnet. The three parameters in the controller transfer function are determined by
inspecting the frequency response of the system and stepping through various values until the
optimal values are determined.
The system containing the magnet and beam interaction along with the controller using a
single filter can be compiled into a block diagram of transfer functions defining the systems
dynamics. This block diagram is shown in Figure 4.4 and can be can be manipulated into a single
transfer function of the form
FGCFGG
RY
+−=
1 (4.14)
where Y is the output, R is the input G, C, and F represent the transfer functions of the beam,
controller and damping force, respectively. Using the equivalent transfer function of the passive-
active eddy current damping system, the stability of the controller can be demonstrated. The root
locus of the system is provided in Figure 4.5, and shows that for a finite range of gains the closed
loop system remains stable.
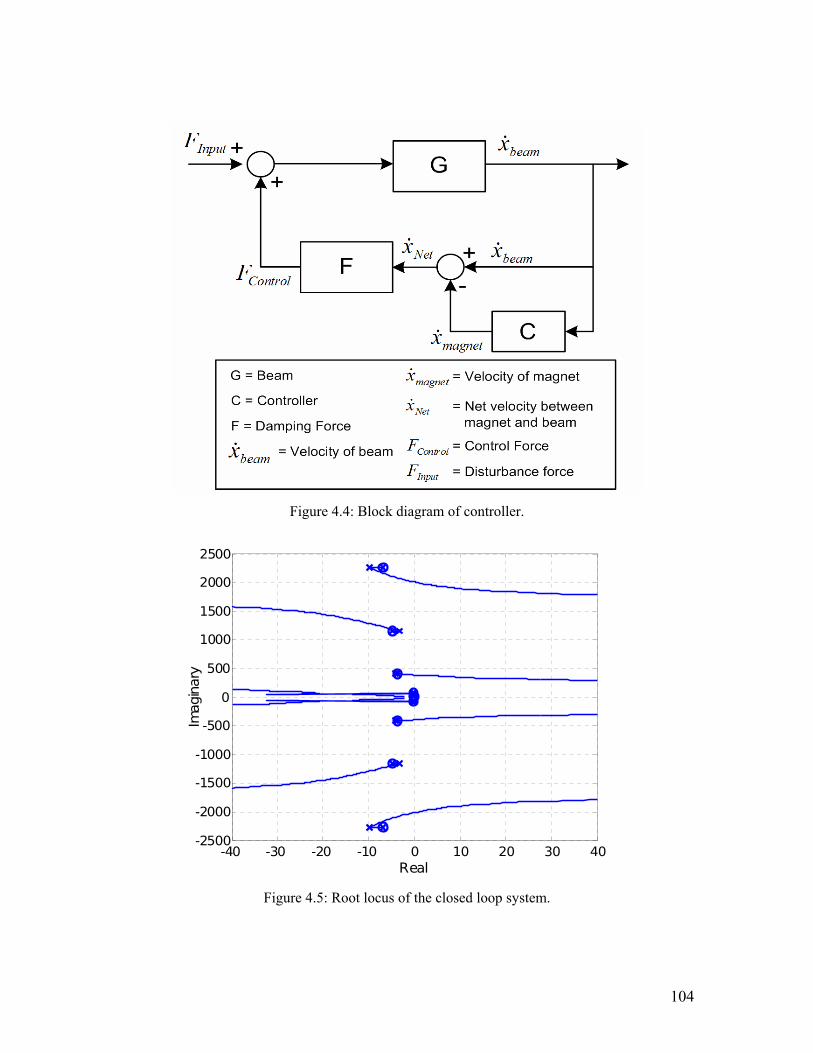
104
Figure 4.4: Block diagram of controller.
-40 -30 -20 -10 0 10 20 30 40-2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000
2500
Real
Imag
inar
y
Figure 4.5: Root locus of the closed loop system.

105
4.3 Experimental Setup of Passive-Active Damper
To validate the predicted response of the passive-active control system experiments were
performed on a cantilever aluminum beam. The dimensions of the beam are shown in Figure 4.6.
For the experiments a neodymium-iron-boron (NdFeB) permanent magnet with radius and length
of 6.35 mm and 12.7 mm, respectively, was used. Other relevant properties of the beam and
magnet are shown in Table 4.1. The analysis of our system required that the eddy currents
generated in the beam be included due to the high conductivity of aluminum.
Fig. 4.6: Schematic showing the dimensions of the beam.
Table 4.1: Physical properties of the beam, conductor and magnet.
Property Value
Young’s modulus of beam 75 GPa
Density of beam 2700 kg/m3
Conductivity of aluminum beam 3.82 x 107 mho/m
Thickness of copper conductor 0.62 mm
Conductivity of copper conductor 5.80 x 107 mho/m
Permanent magnet composition NdFeB 35
Residual magnetic flux of magnet 1.21 kGauss
The passive-active control system functions by sensing the velocity of the beam and the
modifying the position of the permanent magnet such that eddy currents are formed allowing the
vibration of beam to be suppressed without contacting the beam. Two types of disturbances were
applied to the beam and the controller was used to reject them. The first was a continuous
harmonic excitation over a range of frequencies that was generated through a piezoelectric patch
mounted at the root of the beam. The second disturbance was an initial displacement, which was
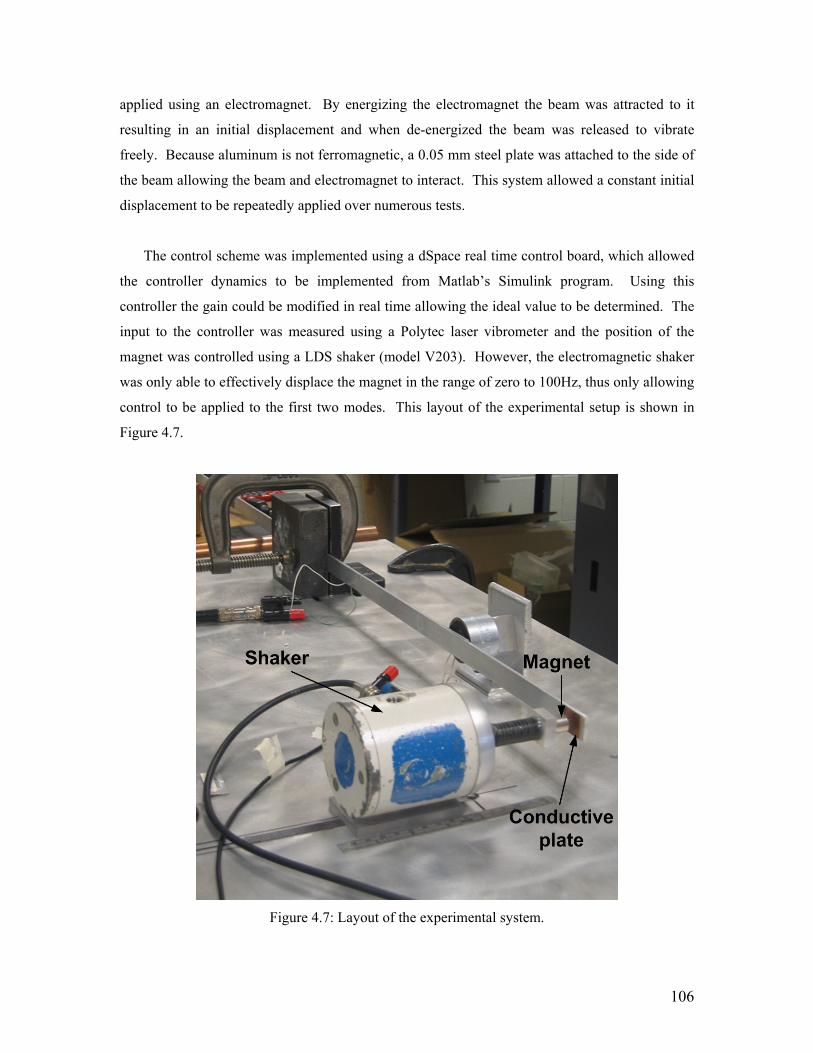
106
applied using an electromagnet. By energizing the electromagnet the beam was attracted to it
resulting in an initial displacement and when de-energized the beam was released to vibrate
freely. Because aluminum is not ferromagnetic, a 0.05 mm steel plate was attached to the side of
the beam allowing the beam and electromagnet to interact. This system allowed a constant initial
displacement to be repeatedly applied over numerous tests.
The control scheme was implemented using a dSpace real time control board, which allowed
the controller dynamics to be implemented from Matlab’s Simulink program. Using this
controller the gain could be modified in real time allowing the ideal value to be determined. The
input to the controller was measured using a Polytec laser vibrometer and the position of the
magnet was controlled using a LDS shaker (model V203). However, the electromagnetic shaker
was only able to effectively displace the magnet in the range of zero to 100Hz, thus only allowing
control to be applied to the first two modes. This layout of the experimental setup is shown in
Figure 4.7.
Figure 4.7: Layout of the experimental system.
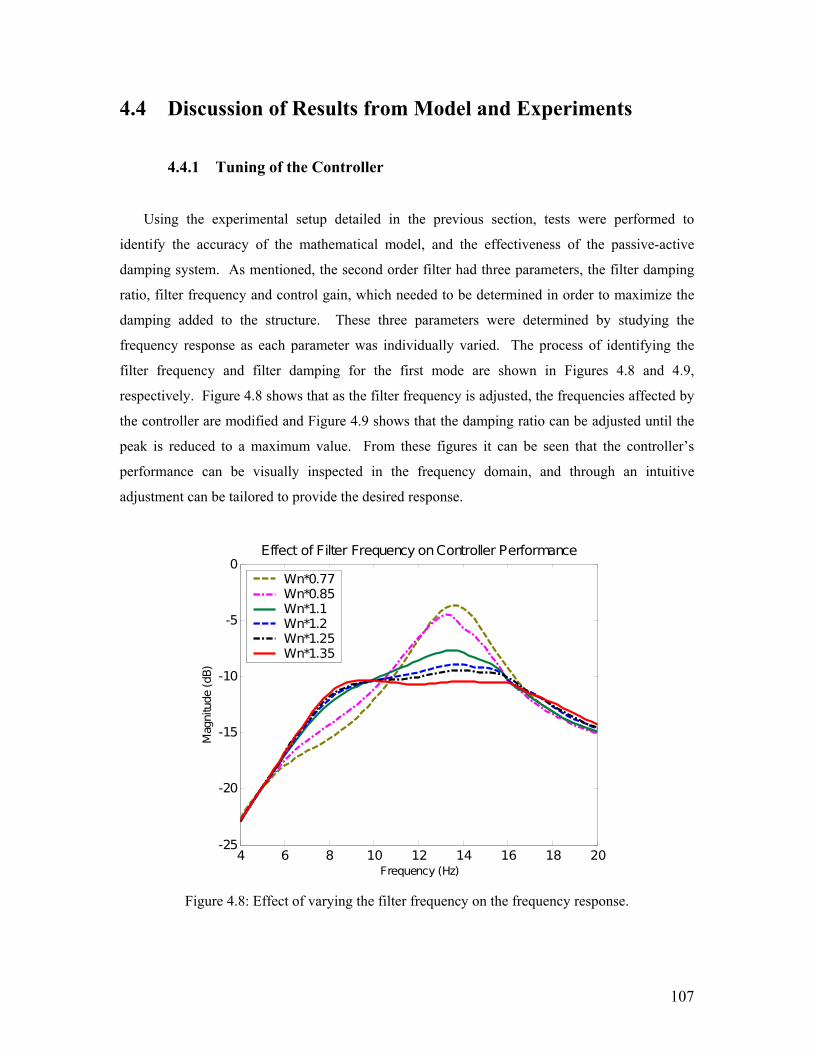
107
4.4 Discussion of Results from Model and Experiments
4.4.1 Tuning of the Controller
Using the experimental setup detailed in the previous section, tests were performed to
identify the accuracy of the mathematical model, and the effectiveness of the passive-active
damping system. As mentioned, the second order filter had three parameters, the filter damping
ratio, filter frequency and control gain, which needed to be determined in order to maximize the
damping added to the structure. These three parameters were determined by studying the
frequency response as each parameter was individually varied. The process of identifying the
filter frequency and filter damping for the first mode are shown in Figures 4.8 and 4.9,
respectively. Figure 4.8 shows that as the filter frequency is adjusted, the frequencies affected by
the controller are modified and Figure 4.9 shows that the damping ratio can be adjusted until the
peak is reduced to a maximum value. From these figures it can be seen that the controller’s
performance can be visually inspected in the frequency domain, and through an intuitive
adjustment can be tailored to provide the desired response.
4 6 8 10 12 14 16 18 20-25
-20
-15
-10
-5
0Effect of Filter Frequency on Controller Performance
Frequency (Hz)
Mag
nitu
de (
dB)
Wn*0.77Wn*0.85Wn*1.1Wn*1.2Wn*1.25Wn*1.35
Figure 4.8: Effect of varying the filter frequency on the frequency response.
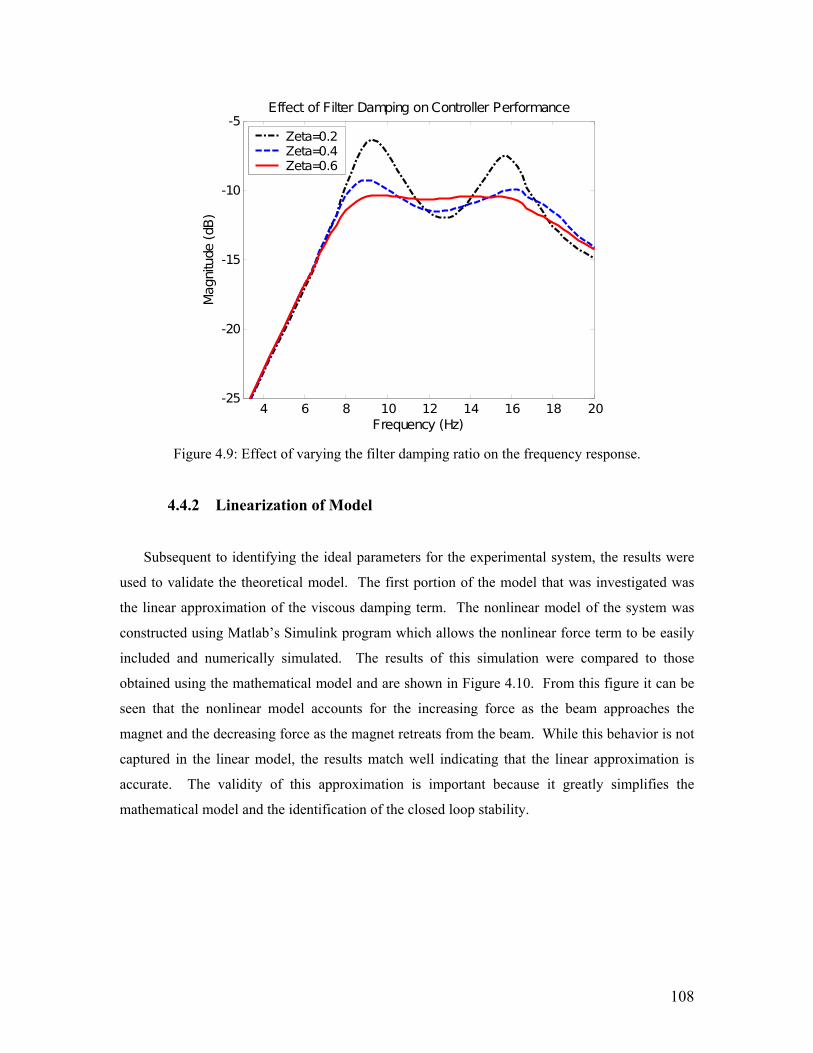
108
4 6 8 10 12 14 16 18 20-25
-20
-15
-10
-5Effect of Filter Damping on Controller Performance
Frequency (Hz)
Magn
itude
(dB
)
Zeta=0.2Zeta=0.4Zeta=0.6
Figure 4.9: Effect of varying the filter damping ratio on the frequency response.
4.4.2 Linearization of Model
Subsequent to identifying the ideal parameters for the experimental system, the results were
used to validate the theoretical model. The first portion of the model that was investigated was
the linear approximation of the viscous damping term. The nonlinear model of the system was
constructed using Matlab’s Simulink program which allows the nonlinear force term to be easily
included and numerically simulated. The results of this simulation were compared to those
obtained using the mathematical model and are shown in Figure 4.10. From this figure it can be
seen that the nonlinear model accounts for the increasing force as the beam approaches the
magnet and the decreasing force as the magnet retreats from the beam. While this behavior is not
captured in the linear model, the results match well indicating that the linear approximation is
accurate. The validity of this approximation is important because it greatly simplifies the
mathematical model and the identification of the closed loop stability.
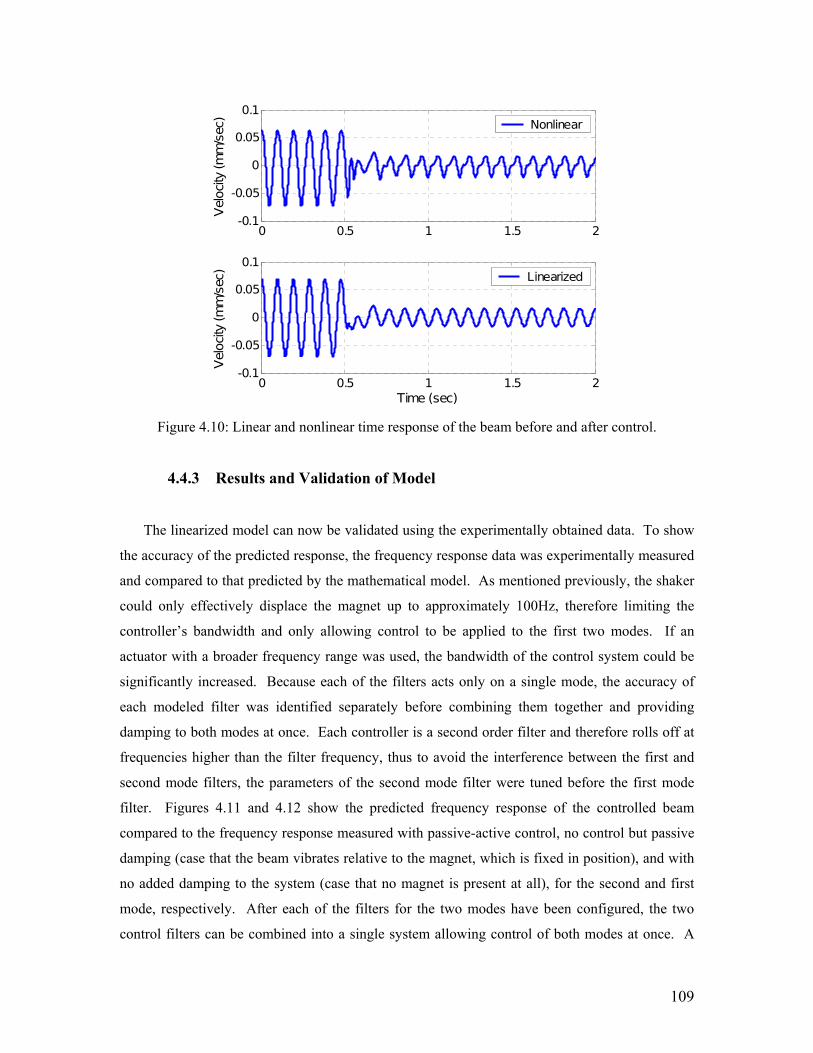
109
0 0.5 1 1.5 2-0.1
-0.05
0
0.05
0.1
Vel
ocity
(mm
/sec
)
0 0.5 1 1.5 2-0.1
-0.05
0
0.05
0.1
Time (sec)
Vel
ocity
(mm
/sec
)
Linearized
Nonlinear
Figure 4.10: Linear and nonlinear time response of the beam before and after control.
4.4.3 Results and Validation of Model
The linearized model can now be validated using the experimentally obtained data. To show
the accuracy of the predicted response, the frequency response data was experimentally measured
and compared to that predicted by the mathematical model. As mentioned previously, the shaker
could only effectively displace the magnet up to approximately 100Hz, therefore limiting the
controller’s bandwidth and only allowing control to be applied to the first two modes. If an
actuator with a broader frequency range was used, the bandwidth of the control system could be
significantly increased. Because each of the filters acts only on a single mode, the accuracy of
each modeled filter was identified separately before combining them together and providing
damping to both modes at once. Each controller is a second order filter and therefore rolls off at
frequencies higher than the filter frequency, thus to avoid the interference between the first and
second mode filters, the parameters of the second mode filter were tuned before the first mode
filter. Figures 4.11 and 4.12 show the predicted frequency response of the controlled beam
compared to the frequency response measured with passive-active control, no control but passive
damping (case that the beam vibrates relative to the magnet, which is fixed in position), and with
no added damping to the system (case that no magnet is present at all), for the second and first
mode, respectively. After each of the filters for the two modes have been configured, the two
control filters can be combined into a single system allowing control of both modes at once. A
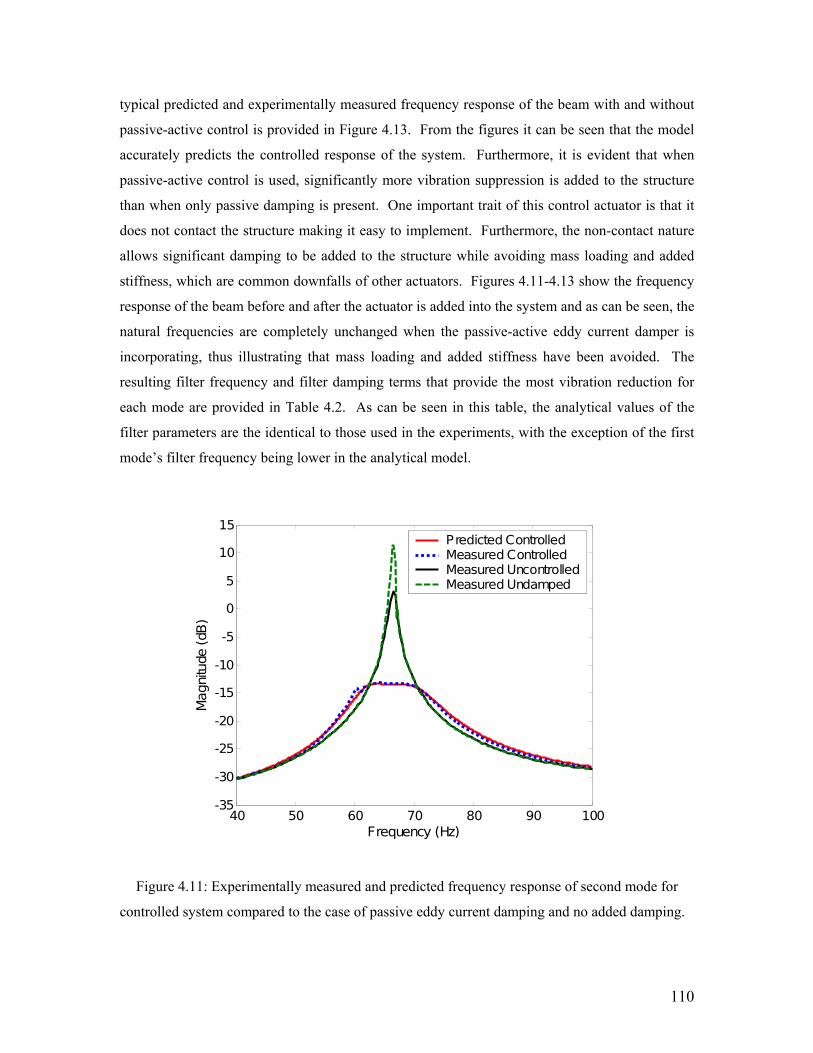
110
typical predicted and experimentally measured frequency response of the beam with and without
passive-active control is provided in Figure 4.13. From the figures it can be seen that the model
accurately predicts the controlled response of the system. Furthermore, it is evident that when
passive-active control is used, significantly more vibration suppression is added to the structure
than when only passive damping is present. One important trait of this control actuator is that it
does not contact the structure making it easy to implement. Furthermore, the non-contact nature
allows significant damping to be added to the structure while avoiding mass loading and added
stiffness, which are common downfalls of other actuators. Figures 4.11-4.13 show the frequency
response of the beam before and after the actuator is added into the system and as can be seen, the
natural frequencies are completely unchanged when the passive-active eddy current damper is
incorporating, thus illustrating that mass loading and added stiffness have been avoided. The
resulting filter frequency and filter damping terms that provide the most vibration reduction for
each mode are provided in Table 4.2. As can be seen in this table, the analytical values of the
filter parameters are the identical to those used in the experiments, with the exception of the first
mode’s filter frequency being lower in the analytical model.
40 50 60 70 80 90 100-35
-30
-25
-20
-15
-10
-5
0
5
10
15
Frequency (Hz)
Magn
itude
(dB
)
P redicted ControlledMeasured ControlledMeasured UncontrolledMeasured Undamped
Figure 4.11: Experimentally measured and predicted frequency response of second mode for
controlled system compared to the case of passive eddy current damping and no added damping.

111
2 4 6 8 10 12 14 16 18 20-45
-40
-35
-30
-25
-20
-15
-10
-5
0
5
Frequency (Hz)
Mag
nitu
de (dB
)
Predicted ControlledMeasured ControlledMeasured UncontrolledMeasured Undamped
Figure 4.12: Experimentally measured and predicted frequency response of first mode for
controlled system compared to the case of passive eddy current damping and no added damping.
10 20 30 40 50 60 70 80 90 100-40
-35
-30
-25
-20
-15
-10
-5
0
5
10
15
Frequency (Hz)
Mag
nitu
de (dB
)
P redicted ControlledMeasured ControlledMeasured Undamped
Figure 4.13: Experimentally measured and predicted frequency response of the beam before and
after passive-active control.

112
Table 4.2: Filter parameters used in experiments and model.
First Mode Second Mode
Experimental Analytical Experimental Analytical
Filter Frequency 1.35 x ω1 1.05 x ω1 0.97 x ω2 0.97 x ω2
Filter Damping Ratio 0.6 0.6 0.125 0.125
Subsequent to identifying the appropriate parameters for each filter and the accuracy of the
mathematical model in the frequency domain, the time response of the system was analyzed.
Using the filter parameters listed in Table 4.2, the beam was excited at its first and second natural
frequency with the magnet located at a fixed position, meaning that passive eddy current damping
was present. Once the beam reached steady state vibration the controller was turned on and the
beam settled to its controlled response. The experimental and predicted results for a continuous
excitation at the beams first natural frequency with the controller turned on at 1.0 sec are shown
in Figure 4.14, while a typical measured and predicted response of the beam excited at the second
natural frequency with the controller turned on at 0.5 seconds are shown in Figure 4.15. As can
be seen from these figures, the controller can quickly suppress the beams vibration. Furthermore,
the amplitude of vibration prior to turning the controller on corresponds to that of passive
damping and once the controller is turned on the amplitude of vibration is reduced by
approximately 79%, thus demonstrating the significant increase in vibration suppression
occurring when the passive-active damping technique is used. Additionally, from these two
figures it is evident that the theoretical model of the passive-active damping system is accurate in
predicting the time response of the controlled beam. However, the model’s accuracy could be
increased by incorporating the nonlinear damping force generated by the eddy current damper,
which is simple to implement in a numerical simulation yet difficult to model analytically.

113
0 0.5 1 1.5 2 2.5-0.1
-0.05
0
0.05
0.1
Time (sec)
Vel
ocity
(m/s
ec)
0 0.5 1 1.5 2 2.5-0.1
-0.05
0
0.05
0.1
Time (sec)
Vel
ocity
(m/s
ec) Measured
Predicted
Figure 4.14: Measured and predicted time response of the beam vibrating at its first bending
mode with the controller turned on at 1.0 second.
0 0.5 1 1.5 2-0.4
-0.2
0
0.2
0.4
Time (sec)
Vel
ocity
(m/s
ec)
0 0.5 1 1.5 2-0.4
-0.2
0
0.2
0.4
Time (sec)
Vel
ocity
(m/s
ec)
Measured
Predicted
Figure 4.15: Measured and predicted time response of the beam vibrating at its second bending
mode with the controller turned on at 0.5 seconds.
Once the performance of the passive-active controller had been demonstrated with a
continuous excitation, its ability to suppress an initial disturbance was investigated. The test was
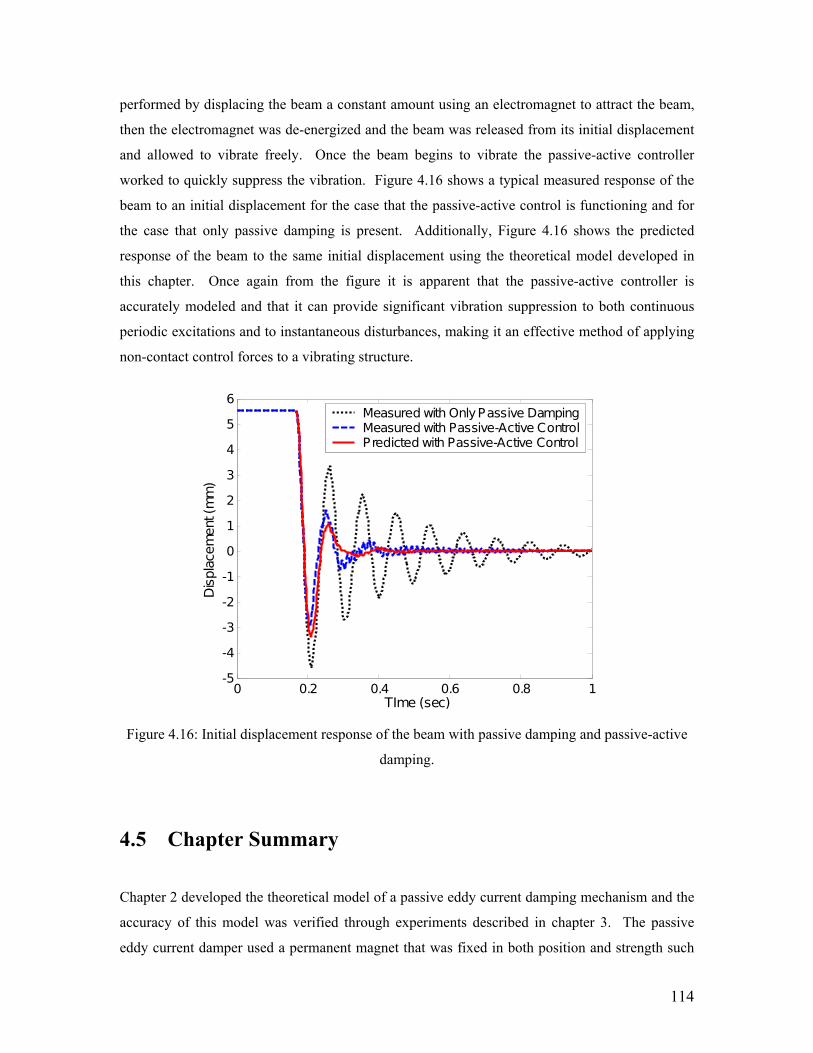
114
performed by displacing the beam a constant amount using an electromagnet to attract the beam,
then the electromagnet was de-energized and the beam was released from its initial displacement
and allowed to vibrate freely. Once the beam begins to vibrate the passive-active controller
worked to quickly suppress the vibration. Figure 4.16 shows a typical measured response of the
beam to an initial displacement for the case that the passive-active control is functioning and for
the case that only passive damping is present. Additionally, Figure 4.16 shows the predicted
response of the beam to the same initial displacement using the theoretical model developed in
this chapter. Once again from the figure it is apparent that the passive-active controller is
accurately modeled and that it can provide significant vibration suppression to both continuous
periodic excitations and to instantaneous disturbances, making it an effective method of applying
non-contact control forces to a vibrating structure.
0 0.2 0.4 0.6 0.8 1-5
-4
-3
-2
-1
0
1
2
3
4
5
6
TIme (sec)
Dis
plac
emen
t (m
m)
Measured with Only Passive DampingMeasured with Passive-Active ControlPredicted with Passive-Active Control
Figure 4.16: Initial displacement response of the beam with passive damping and passive-active
damping.
4.5 Chapter Summary
Chapter 2 developed the theoretical model of a passive eddy current damping mechanism and the
accuracy of this model was verified through experiments described in chapter 3. The passive
eddy current damper used a permanent magnet that was fixed in both position and strength such

115
that the motion of the structure in the magnetic field caused eddy currents to form. As the
currents circulate through the material, they are dissipated by the conductor’s internal resistance
and because a portion of the conductors kinetic energy was used to generate the currents a
damping force results. The density of the eddy currents and the damping force were shown to be
dependent on the velocity of the beam in the magnetic field. In this chapter a passive-active
damping scheme was developed by allowing the position of the magnet to be varied relative to
the beam. The passive component of this new system is the motion of the beam in the static
magnetic field, while an active component is added by controlling the position of the magnet
relative to the beam. By monitoring the beams motion and actively displacing the magnet
accordingly, the net velocity between the permanent magnet and the beam can be controlled such
that the damping applied to the beam can be maximized.
This chapter began by modifying the model developed in chapter 2, such that the motion of
the magnet was included in the damping force. Once the damping force for the passive-active
damping concept was developed, the design of the controller used to actively modify the position
of the magnet was outlined. The controller was chosen to be a second order filter with an input of
the velocity of the structure and an output of the position of the magnet. This choice of controller
input and output was chosen by theoretically and experimentally testing each combination. A
closed loop transfer function of the system was then identified in order to allow the stability of
the system to be shown. Using the root locus method, the closed loop response of a cantilever
beam was shown to be stable for a finite range of gain values. After showing the system’s
stability, the linear approximation used in the theoretical model needed to be verified for
accuracy. The effect of linearization on the model accuracy was identified by comparing the
response of a numerical simulation of the nonlinear system to the predicted response of the linear
system. The results showed that the dynamics were accurately predicted using the linear
assumption.
Once the theoretical model was formulated, an experimental analysis was performed to
demonstrate both the accuracy of model and the performance of the passive-active damper. An
electromagnetic shaker was chosen as the actuator to displace the permanent magnet. However,
the choice of a shaker limited the bandwidth of the controller to 100Hz because the shaker could
not effectively displace the permanent magnet above this frequency. Due to this limited
bandwidth, only the first two modes could be controlled, although if a more sophisticated
displacement actuator were used, higher modes could be targeted. The first step in performing

116
the experimental analysis was to experimentally tune the controller parameters such that it would
provide the most vibration suppression at the resonant frequencies. The resulting values for each
parameter were then compared to those identified from the theoretical model. It was shown that
parameters for each mode matched the model, with the exception of the filter frequency of the
first mode. Once both the model and the experiments were tuned, it was shown that the model
predicted the closed loop response of the beam very well. Furthermore it was demonstrated that
the passive-active controller could reduce the settling time of the passive system by 79%, thus
illustrating its effectiveness as a vibration suppression mechanism.

117
Chapter 5
Active Eddy Current Damping System
5.1 Introduction to the Active Eddy Current Controller
There exist many methods of adding damping to a vibrating structure; however, very few can
function without ever coming into contact with the structure. One such method is eddy current
damping. This magnetic damping scheme functions through the eddy currents that are generated
in a conductive material when it is subjected to a time changing magnetic field. Due to the
circulation of these currents a magnetic field is generated that interacts with the applied field
resulting in a force. In chapters 2-4, passive and passive-active dampers were developed that
caused the formation of eddy currents due to the motion of a conductor in a static magnetic field.
In this chapter, an active damper will be developed that functions by actively modifying the
current flowing in a coil, thus generating a time varying magnetic field. By actively controlling
the strength of the field around the conductor, the eddy currents induced and the resulting
damping force can be controlled.
While the passive eddy current damper developed in chapters 2 and 3, and the passive-active
eddy current damper developed in chapter 4 can provide significant damping to the structure, it is
often desirable to use a completely active system. For instance, in the case of a deployable
satellite it may be necessary to turn the magnetic field off when the satellite is packaged in its
launch configuration, which is not possible when permanent magnets are used. Furthermore, the
use of an active control system allows specific modes of vibration to be targeted and in most
cases more vibration suppression to be achieved. Additionally, in the case of the passive-active
vibration control system, an actuation method was required to displace the magnet relative to the

118
beam, which can be cumbersome and limit the bandwidth of the controller. However, the active
system does not require any additional hardware and can be used to apply control to higher
frequency modes. Lastly, the coil can be made to be very small and lightweight, which is
desirable in space applications.
In previous studies, electromagnets have been located a small distance from a conductive
structure such that the structures motion is in the poling axis, however, none of these studies have
investigated the ability to apply vibration control. For instance, Tani et al. (1990), Morisue
(1990), Tsuboi et al. (1990), Takagi et al. (1992) and Takagi and Tani (1994) have all analyzed
the response of a conducting plate subjected to impulsive magnetic fields. Each of these
researchers has applied upwards of 1000 amps to an electromagnet and predicted the dynamic
response. Additionally, Lee (1996) investigated the stability of electrically conducting beam-
plates when subjected to transverse magnetic fields. The study showed that three stability regions
existed, but never studied the effect of a time changing magnetic field or the ability to use the
system for vibration suppression.
This chapter develops a new active eddy current damper that utilizes an electromagnetic coil
to produce an emf in the beam. First, this chapter will develop the theoretical model of an active
eddy current damper that functions by placing an electromagnetic coil a small distance from a
conductive beam and actively changing the current flowing through the coil. A schematic of the
configuration of the system is shown below in Figure 5.1. As will be shown in the following
sections, the eddy current density will be both a function of the motion of the beam and the time
rate of change of the magnetic field generated by the coil. The beam’s motion will occur due to
its vibration, but the time rate of change of the magnetic flux applied to the beam will be actively
controlled by sensing the beam’s motion and adjusting the current flowing through the coil such
that the damping can be maximized. A feedback controller will be used to modify the current
supplied to the coil in order to control the force applied to the beam. Once the controller has been
developed the system will be numerically simulated and experiments performed to demonstrate
the accuracy of the model. Furthermore, the control system will be shown to be an effective
method of applying vibration control to a vibrating structure.
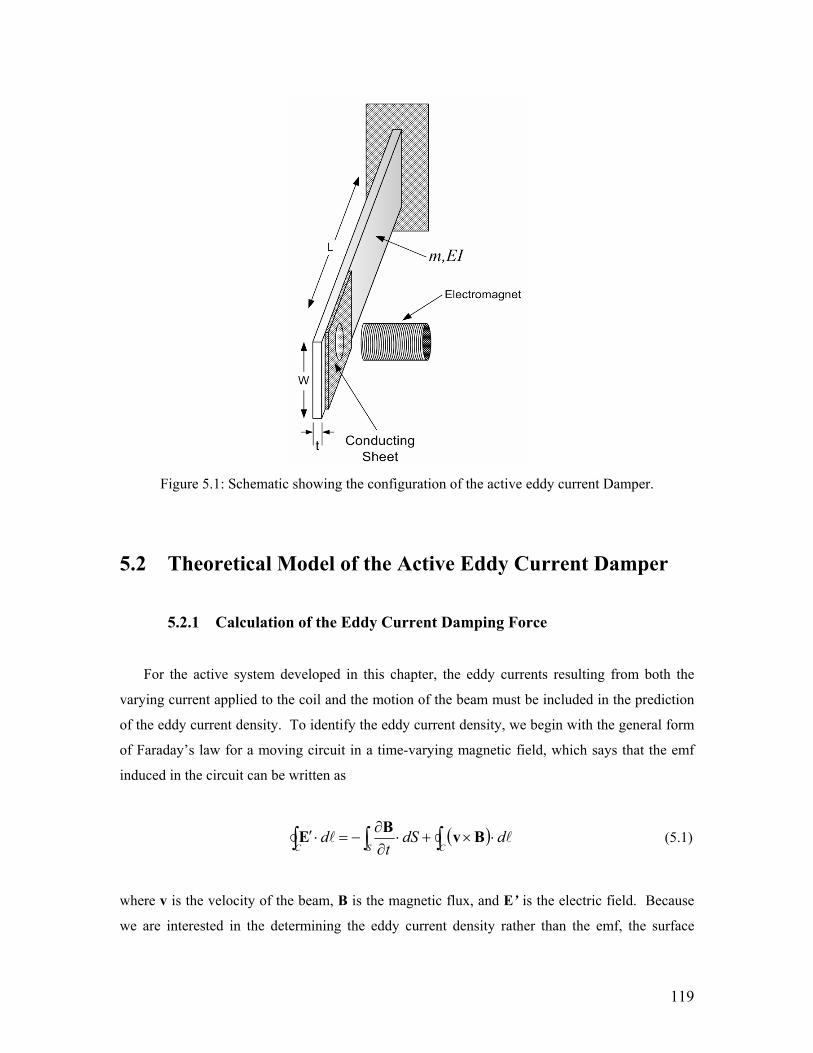
119
Figure 5.1: Schematic showing the configuration of the active eddy current Damper.
5.2 Theoretical Model of the Active Eddy Current Damper
5.2.1 Calculation of the Eddy Current Damping Force
For the active system developed in this chapter, the eddy currents resulting from both the
varying current applied to the coil and the motion of the beam must be included in the prediction
of the eddy current density. To identify the eddy current density, we begin with the general form
of Faraday’s law for a moving circuit in a time-varying magnetic field, which says that the emf
induced in the circuit can be written as
( )∫∫∫ ⋅×+⋅∂∂
−=⋅′CSC
ddSt
d BvBE (5.1)
where v is the velocity of the beam, B is the magnetic flux, and E’ is the electric field. Because
we are interested in the determining the eddy current density rather than the emf, the surface

120
integral in equation (5.1) defining the effect of the changing magnetic field should be reduced to a
line integral, which will simplify the solution. To reduce a surface integral to a line integral,
Stokes theorem can be used. This theorem states that a surface integral evaluated over the curl of
a vector field is equivalent to a line integral evaluated over the vector field, and can be written as
∫ ∫ ⋅=⋅×∇S C
ddS GG (5.2)
where ∇ is the gradient and G is an arbitrary continuous vector field. The Point form of
Maxwell’s equations states that the magnetic flux density is equal to the curl of the magnetic
potential, this relationship is defined by
AB ×∇= (5.3)
where B is the magnetic flux density, and A is the magnetic potential. Using equation 5.3 with
Stokes theorem, the surface integral of equation 5.1 can be rewritten as
( ) ∫∫∫ ⋅∂∂
−=⋅×∇∂∂
−=⋅∂∂
−CSS
dt
dSt
dSt
AAB (5.4)
Substitution of equation (5.4) into equation (5.1) and the subsequent cancellation of the line
integrals, allows the eddy current density to be defined as
( ) ( ) ⎥⎦⎤
⎢⎣⎡
∂∂
−+−=⎥⎦⎤
⎢⎣⎡
∂∂
−×==t
BBvt xyz
AjiABvEJ σσσ (5.5)
where σ is the conductivity of the circuit and vz is the velocity of the beam in the z-direction. To
identify the eddy current density, the magnetic flux density and the magnetic potential are
required to be known. The magnetic flux density of a cylindrical permanent magnet was derived
in chapter 2 and can be modified to represent the flux in the radial or y-direction and the z-
direction of an electromagnetic coil by the following equations
( ) ( ) ( ) ( )∫− ′′−′−=0
10 ,,4
,,Ly zdzzybIzzbtItzyB
πµ
(5.6)

121
( ) ( ) ( )∫− ′′−=0
20 ,,4
,,Lz zdzzybIbtItzyB
πµ
(5.7)
where 'z and L are the distance in the z-direction and the length of the circular magnet,
respectively and the term I1 and I2 are defined in Appendix A. As shown in Figure 2.2, the
magnetic flux distributions in equations (5.6) and (5.7) are symmetric about the z-axis due to the
symmetry of the circular magnet.
While the Magnetic flux has been derived in chapter 2, the magnetic potential has not and
therefore must be determined. The magnetic potential of a circular strip carrying a current I is
shown in Figure 5.2 and can be written as (Cheng, 1992)
( )∫=
πφ
πµ 2
01
0
4d
RdtId lA (5.8)
where R1 is the magnitude of the vector R1, µ0 is the permeability and I is the current flowing
through the strip. The vector R1 is defined by the distance between the differential element on the
circular strip and the point on the y-z plane as shown in Figure 5.1, and defined as
rRR −=1 (5.9)
where R is the vector defining the position of the point in space at which the magnetic flux is to
be determined and r is the vector defining the position of the differential element defined by
kjR zy += (5.10)
jir φφ sincos bb += (5.11)
The length vector dl of the infinitesimal strip can be written as
jil φφφφ dbdbd cossin +−= (5.12)
where b is the radius of the circular magnet.
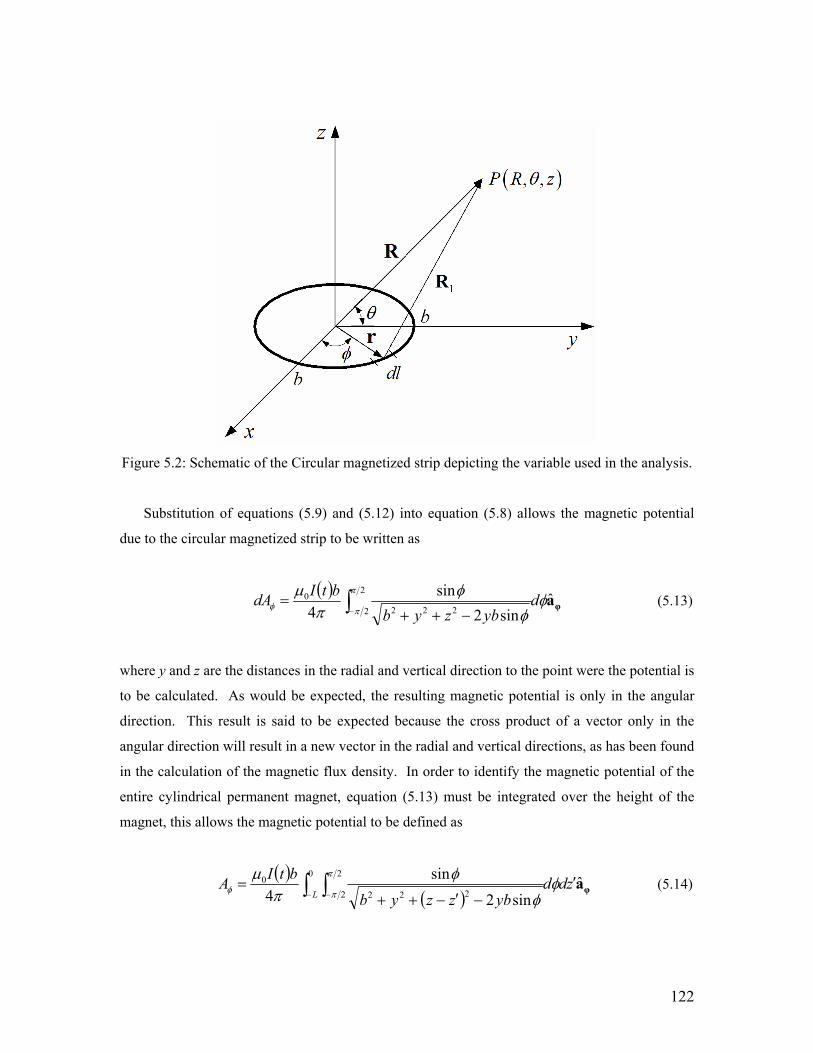
122
Figure 5.2: Schematic of the Circular magnetized strip depicting the variable used in the analysis.
Substitution of equations (5.9) and (5.12) into equation (5.8) allows the magnetic potential
due to the circular magnetized strip to be written as
( )φa
sin2sin
42
2 2220 φ
φφ
πµ π
πφ dybzyb
btIdA ∫− −++= (5.13)
where y and z are the distances in the radial and vertical direction to the point were the potential is
to be calculated. As would be expected, the resulting magnetic potential is only in the angular
direction. This result is said to be expected because the cross product of a vector only in the
angular direction will result in a new vector in the radial and vertical directions, as has been found
in the calculation of the magnetic flux density. In order to identify the magnetic potential of the
entire cylindrical permanent magnet, equation (5.13) must be integrated over the height of the
magnet, this allows the magnetic potential to be defined as
( )( ) φa
sin2
sin4
0 2
2 2220 ∫ ∫− −
′−′−++
=L
zddybzzyb
btIA φφ
φπ
µ π
πφ (5.14)

123
where z’ is the differential height of the magnet. Equation (5.14) can now be used along with
equation (5.6) to calculate the eddy current density of equation (5.5). Once the eddy current
density is known the damping force can be determined by
( ) ( )
( ) ( ) z
z
a
a
BJF
ˆ,,2
ˆ,,
0
2
0
2
0 0
22
0 0
⎥⎦
⎤⎢⎣
⎡−
∂∂
=
⎥⎦
⎤⎢⎣
⎡−
∂∂
=
×=
∫∫
∫ ∫∫ ∫
∫
cc
cc
r
gy
r
gy
g
r
y
r
gy
V
dylyyBvdylyBt
Ay
dydlyyBvdydlyBt
Ay
dV
φ
ππ φ
πσδ
φφσδ (5.15)
where δ and v are the thickness and the vertical velocity of the conducting sheet, respectively, rc
is the equivalent radius of the conductor that preserves its surface area and lg is the distance
between the conducting sheet and the bottom of magnet as was shown in Figure 2.2. When the
damping force is included into the equation of motion of the beam, it is split into two terms, one
defining the force due to a transformer emf and the second due to a motional emf. Equation
(5.15) contains two integrals, the first defines the transformer emf, or the force due to the time
changing magnetic field and the second integral defines the motional emf, or the eddy current
damping force due to the beam’s velocity in the magnetic field. The transformer force must be
included as an external force and the motional force can be included as a damping term due to its
dependence on the velocity of the beam. The integration of equations (5.6), (5.14) and (5.15)
cannot be solved for analytically because they result in a series of elliptical integrals and therefore
a numerical integration method must be used to obtain the damping force in equation (5.15). This
damping force can now be incorporated into the dynamics of the beam and the response can be
determined. However, in looking at equation (5.15) it can be seen that the eddy currents due to
both the motional and transformer emf are very nonlinear. For this reason the dynamics response
of the the system response will be numerically simulated in MATLAB’s Simulink program.
The force generated by actively controlling the strength of the magnetic field, results in an
interesting effect; the frequency of the force applied to the beam is twice the frequency of the
current applied to the coil. This effect is due to the trigonometric identity that states the product
of a sine and cosine wave results in a sine wave at twice the frequency of two waves. This
identity appears in the first integral in equation (5.15) defining the transformer portion of the eddy
current damping force as the product of the derivative of the magnetic potential and the magnetic

124
flux density. It may not be immediately apparent that this effect occurs until it is realized that the
magnetic flux density and magnetic potential are both a function of the time dependent current
applied to the electromagnet. This force doubling effect has serious consequences that affect the
design and performance of the active eddy current control system, and will be discussed in
section 5.2.3.
5.2.2 Inclusion of Active Damping in Beam Equation
The response of the beam and the eddy current damper can be defined in a very similar manor
as was done in chapter 4. The equation of motion for a beam was derived in chapter 2 and can be
written as follows
( ) ( ) ( ) ( ) ( ) ( ) ( )∫ ∑=
+=++L p
iii xtFdxxtxftrtrtr
01
, φφKCM (5.16)
where the mass matrix M, the damping matrix C, and the stiffness matrix K are defined by
( ) ( ) ( )∫==L T
ij dxxxxm0
φφρM (5.17)
( ) ( ) ( )∫ ′′′′==L T
ij dxxxxEIk0
φφK (5.18)
( ) ( )∫==L
bT
ij dxxcxc0
φφC (5.19)
where E is the modulus of elasticity, I is the beam’s moment of inertia, ρ is the area density of the
beam, cb is the beam’s damping coefficient, f(x,t) are distributed forces, Fi are concentrated
forces, and ( )xφ is the assumed mode shape of the beam. The equation of motion for the passive
and passive-active cases differs from the active damper, because there are now two separate eddy
current force terms. As mentioned in the previous section, one term is modeled as a concentrated
external force, while the other is modeled as a viscous damping force. The eddy current force due
to the transformer emf is included as a concentrated force and can be written as
( ) ( ) ( )e
r
yT xdyBt
AyFxtF c φπσδφ φ
⎥⎦
⎤⎢⎣
⎡∂∂
== ∫011 2 (5.20)

125
where FT is the transformer eddy current force and ( )exφ is the magnitude of the mode shape at
the location of the eddy current damper. The eddy current damping coefficient due to the
motional emf, can be arrived at by dividing the motional damping force of equation (5.15) by the
beam’s velocity, or written as follows
( ) ( ) ( ) ( )trxcxtF eeφφ =22 (5.21)
where ce is the eddy current damping coefficient defined as
( )∫−==cr
gyz
Me dylyyB
vFc
0
2 ,2πσδ (5.22)
where FM is the motional eddy current force. Equations (5.20) and (5.21) show the active eddy
current damper generates both a viscous damping force and a control force. As with the passive
and passive-active vibration control methods, the damping force is nonlinear with respect to the
distance between the magnet and beam. However, in the analysis of the passive and passive-
active dampers the system was linearized while in the case of the active system it will not be
linearized and therefore numerically simulated. Substitution of equations (5.17)-(5.21) into
equation (5.16) defines the interaction between the beam and the active eddy current damper.
5.2.3 Controller Design
A positive feedback control system (Fanson and Caughey, 1987) was designed such that the
current flowing through the electromagnet could be actively modified and the vibration
suppressed. A block diagram representation of the closed loop dynamics of the system with the
active control system is presented in Figure 5.3. This figure describes the manor in which the
sensor signal is applied to the control system and the resulting force due to the current output of
the controller. Additionally, Figure 5.3 shows the nonlinearities that are present in the system due
to the conversion of the control current into eddy currents in the conducting structure. Due to the
frequency doubling effect of the force applied to the beam, detailed in section 5.2.1, the controller
was required to divide the sensing signal in half, such that the frequency of the current applied to
the electromagnet was at half that of the vibration of the beam. Therefore the force applied to the

126
beam would be at the same frequency as its vibration. The equation used to divide the force is
half is as follows
( )∫=⎟⎠⎞
⎜⎝⎛
tdtωω sin
21sin (5.23)
were ω is the frequency of the harmonic signal. This equation is applied to the output of the
control filters which were designed for each mode. The feedback controller is a second order
filter with three parameters chosen to provide the greatest vibration suppression to the frequency
response. Two separate filter designs were used and are defined as
22
2
2 fff
f
ssK
ωωζω
++ (5.24)
22
22
2 fff
f
ssK
ωωζω
++ (5.25)
where K is the controller gain, ωf is the filter frequency and ζf is the filter damping ratio. The
filter defined in equation (5.24) was used to apply control to all modes but the second mode,
which was controlled using the filter defined in equation (5.25). Both compensators defined in
equations (5.24) and (5.25) contain an extra zero in the numerator to account for the integration
used in equation (5.23) that is required to reduce the frequency of the sensing signal by half. The
filter of equation (5.25) contains an additional zero to account for a phase shift that occurs after
the natural frequency in the closed loop response of the beam. The closed loop response of the
beam’s second mode with the filter of equation (5.24) and equation (5.25) can be seen in the
frequency response of Figure 5.4. This phase shift can be seen as a drop in the phase after the
natural frequency. The phase shift leads to an amplification of the response above the natural
frequency. This variation is caused by the relationship between the current applied to the coil and
the magnetic field generated. The effect of the coil was not immediately realized and results
showing the predicted response of the system before the coil dynamics were identified will be
presented first, followed by the results after the relation is included into the simulation.
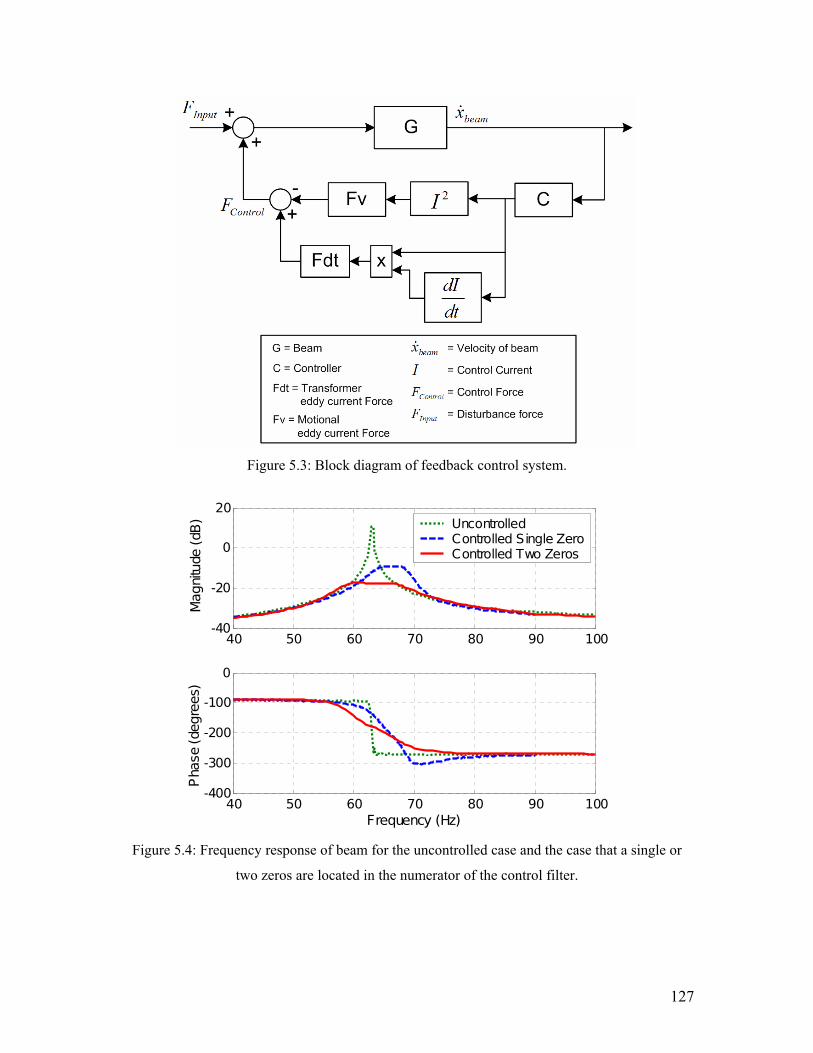
127
Figure 5.3: Block diagram of feedback control system.
40 50 60 70 80 90 100-40
-20
0
20
Mag
nitu
de (
dB)
40 50 60 70 80 90 100-400
-300
-200
-100
0
Frequency (Hz)
Pha
se (
degr
ees)
UncontrolledControlled Single ZeroControlled Two Zeros
Figure 5.4: Frequency response of beam for the uncontrolled case and the case that a single or
two zeros are located in the numerator of the control filter.
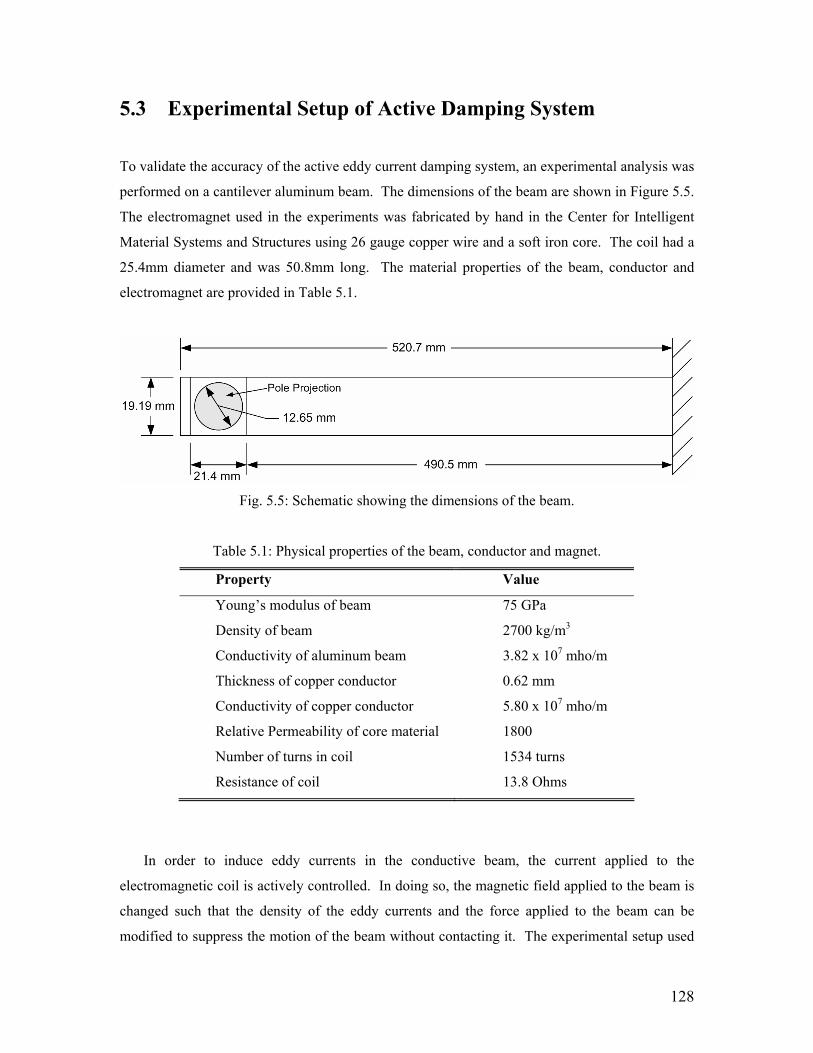
128
5.3 Experimental Setup of Active Damping System
To validate the accuracy of the active eddy current damping system, an experimental analysis was
performed on a cantilever aluminum beam. The dimensions of the beam are shown in Figure 5.5.
The electromagnet used in the experiments was fabricated by hand in the Center for Intelligent
Material Systems and Structures using 26 gauge copper wire and a soft iron core. The coil had a
25.4mm diameter and was 50.8mm long. The material properties of the beam, conductor and
electromagnet are provided in Table 5.1.
Fig. 5.5: Schematic showing the dimensions of the beam.
Table 5.1: Physical properties of the beam, conductor and magnet.
Property Value
Young’s modulus of beam 75 GPa
Density of beam 2700 kg/m3
Conductivity of aluminum beam 3.82 x 107 mho/m
Thickness of copper conductor 0.62 mm
Conductivity of copper conductor 5.80 x 107 mho/m
Relative Permeability of core material 1800
Number of turns in coil 1534 turns
Resistance of coil 13.8 Ohms
In order to induce eddy currents in the conductive beam, the current applied to the
electromagnetic coil is actively controlled. In doing so, the magnetic field applied to the beam is
changed such that the density of the eddy currents and the force applied to the beam can be
modified to suppress the motion of the beam without contacting it. The experimental setup used
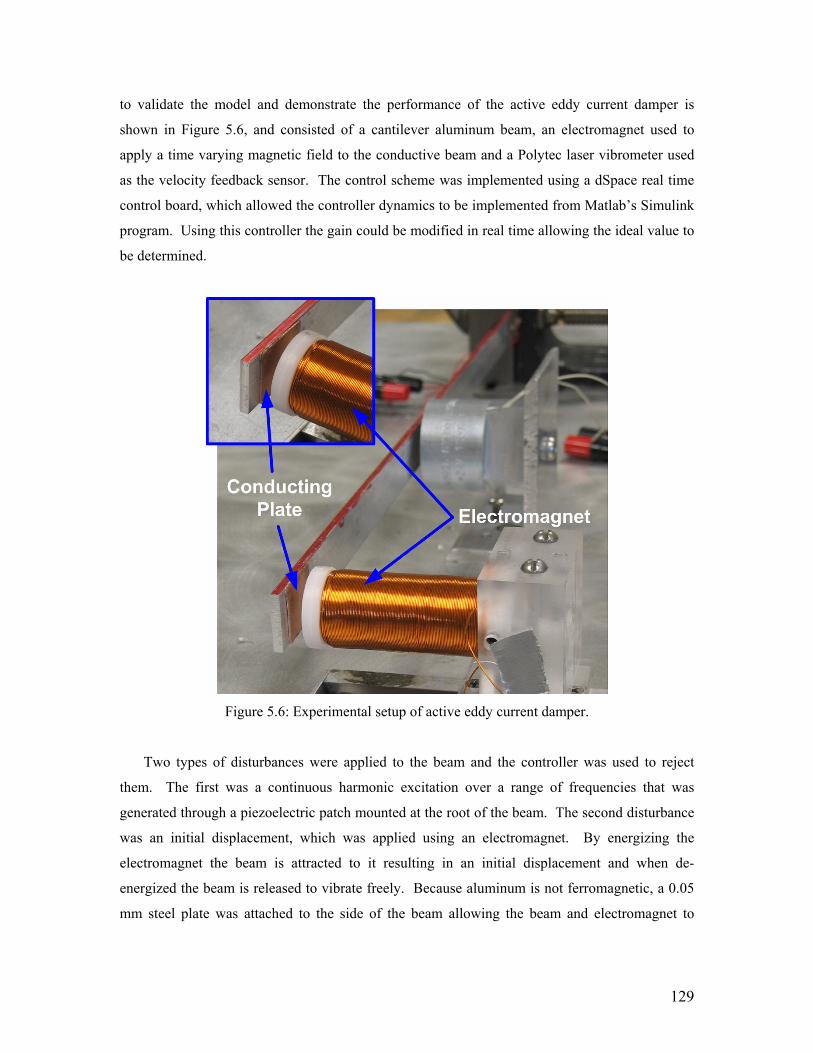
129
to validate the model and demonstrate the performance of the active eddy current damper is
shown in Figure 5.6, and consisted of a cantilever aluminum beam, an electromagnet used to
apply a time varying magnetic field to the conductive beam and a Polytec laser vibrometer used
as the velocity feedback sensor. The control scheme was implemented using a dSpace real time
control board, which allowed the controller dynamics to be implemented from Matlab’s Simulink
program. Using this controller the gain could be modified in real time allowing the ideal value to
be determined.
Figure 5.6: Experimental setup of active eddy current damper.
Two types of disturbances were applied to the beam and the controller was used to reject
them. The first was a continuous harmonic excitation over a range of frequencies that was
generated through a piezoelectric patch mounted at the root of the beam. The second disturbance
was an initial displacement, which was applied using an electromagnet. By energizing the
electromagnet the beam is attracted to it resulting in an initial displacement and when de-
energized the beam is released to vibrate freely. Because aluminum is not ferromagnetic, a 0.05
mm steel plate was attached to the side of the beam allowing the beam and electromagnet to
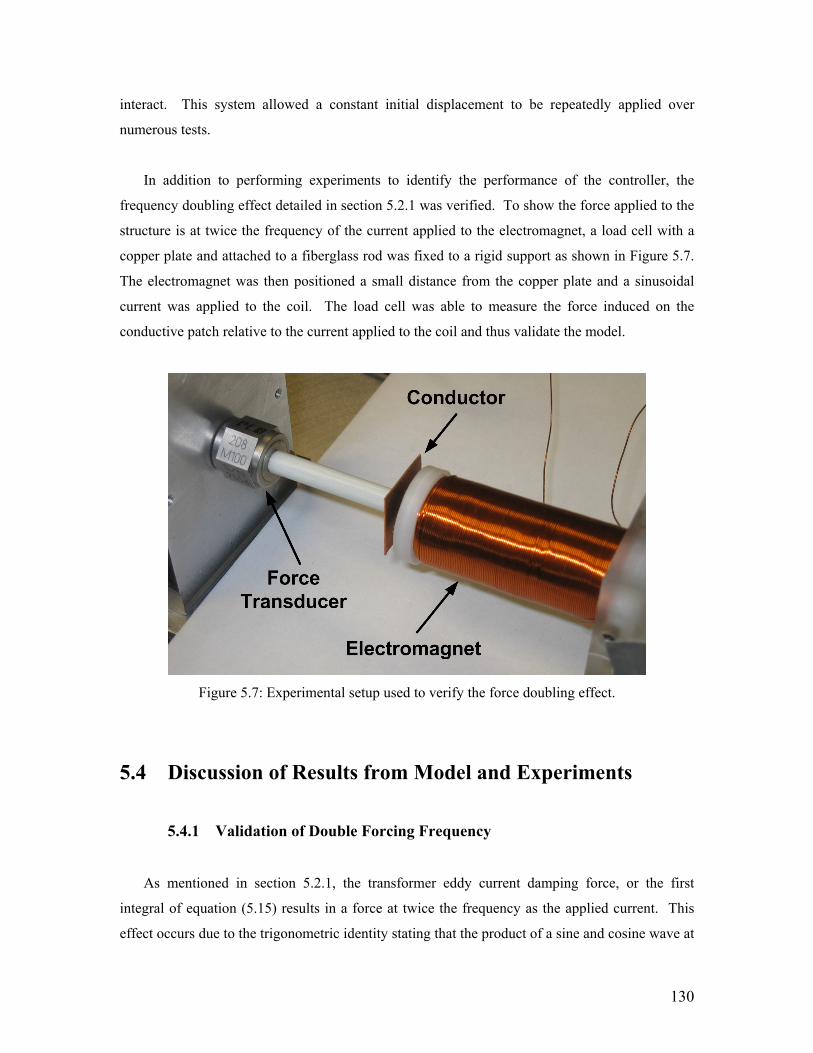
130
interact. This system allowed a constant initial displacement to be repeatedly applied over
numerous tests.
In addition to performing experiments to identify the performance of the controller, the
frequency doubling effect detailed in section 5.2.1 was verified. To show the force applied to the
structure is at twice the frequency of the current applied to the electromagnet, a load cell with a
copper plate and attached to a fiberglass rod was fixed to a rigid support as shown in Figure 5.7.
The electromagnet was then positioned a small distance from the copper plate and a sinusoidal
current was applied to the coil. The load cell was able to measure the force induced on the
conductive patch relative to the current applied to the coil and thus validate the model.
Figure 5.7: Experimental setup used to verify the force doubling effect.
5.4 Discussion of Results from Model and Experiments
5.4.1 Validation of Double Forcing Frequency
As mentioned in section 5.2.1, the transformer eddy current damping force, or the first
integral of equation (5.15) results in a force at twice the frequency as the applied current. This
effect occurs due to the trigonometric identity stating that the product of a sine and cosine wave at
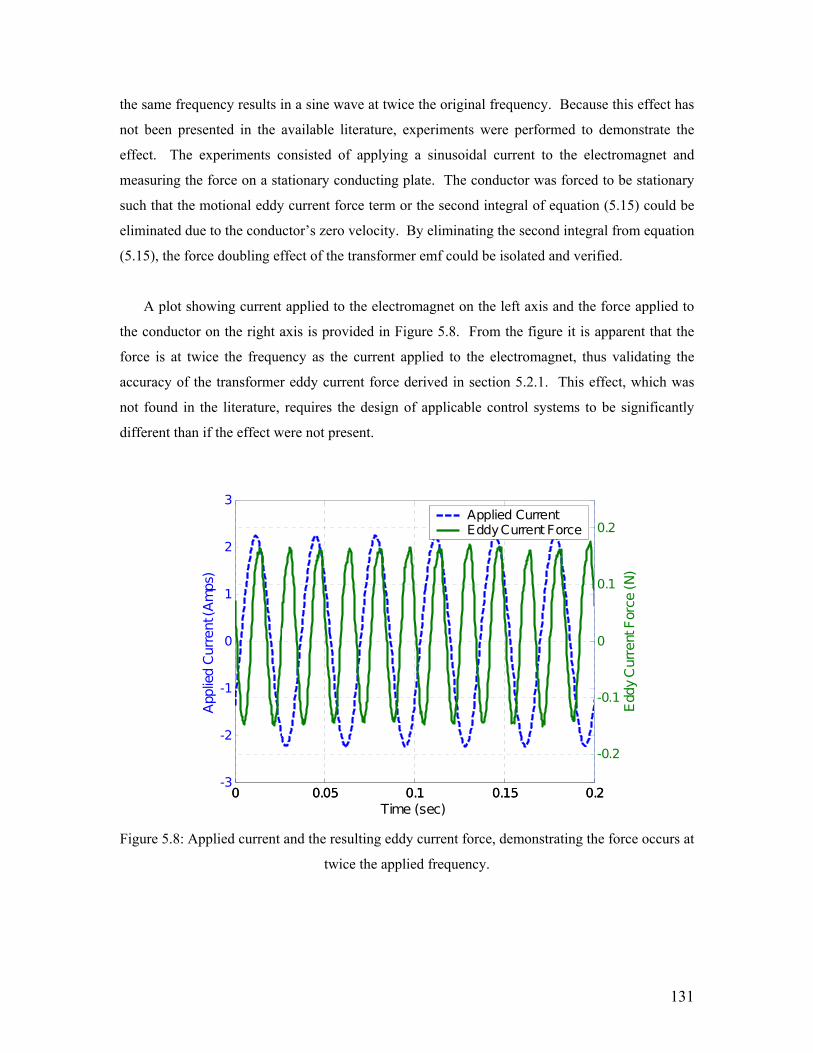
131
the same frequency results in a sine wave at twice the original frequency. Because this effect has
not been presented in the available literature, experiments were performed to demonstrate the
effect. The experiments consisted of applying a sinusoidal current to the electromagnet and
measuring the force on a stationary conducting plate. The conductor was forced to be stationary
such that the motional eddy current force term or the second integral of equation (5.15) could be
eliminated due to the conductor’s zero velocity. By eliminating the second integral from equation
(5.15), the force doubling effect of the transformer emf could be isolated and verified.
A plot showing current applied to the electromagnet on the left axis and the force applied to
the conductor on the right axis is provided in Figure 5.8. From the figure it is apparent that the
force is at twice the frequency as the current applied to the electromagnet, thus validating the
accuracy of the transformer eddy current force derived in section 5.2.1. This effect, which was
not found in the literature, requires the design of applicable control systems to be significantly
different than if the effect were not present.
0 0.05 0.1 0.15 0.2-3
-2
-1
0
1
2
3
App
lied
Cur
rent
(A
mps)
Time (sec)0 0.05 0.1 0.15 0.2
-0.2
-0.1
0
0.1
0.2
Edd
y C
urre
nt F
orce
(N
)
Applied CurrentEddy Current Force
Figure 5.8: Applied current and the resulting eddy current force, demonstrating the force occurs at
twice the applied frequency.

132
5.4.2 Tuning of the Controller
Once the controllers detailed in section 5.2.3 were designed, the appropriate filter properties
had to be identified. This process was detailed in section 4.3.1 of chapter 4 and consists of
observing the closed loop frequency response of the system and modifying the parameters to
achieve maximum damping. This process was first performed in the numerical simulation to
identify the predicted parameter and then these parameters were applied to the experiments and
retuned to obtain the variation in filter parameters. The resulting parameters and the performance
of the active control system will be provided in the subsequent section. Once the filter had been
tuned it could be effectively used to suppress the vibration of the beam.
5.4.3 Results and Validation of Model
Once the filters have been tuned to apply the maximum control to each targeted frequency,
the performance of the new active eddy current control system and the accuracy of the modeling
techniques developed in this chapter can be demonstrated through a comparison of experimental
and analytical results. Each controller is a second order filter that applies vibration suppression to
a narrow band of frequencies, typically located around one of the system’s natural frequencies;
therefore if multiple modes of vibration are to be controlled, each filter must be designed
separately. As mentioned in chapter 4, the second order filter rolls off at frequencies higher than
the filter frequency, thus allowing each filter to have little effect on higher modes but can lead to
spillover and destabilization of the lower frequencies. To avoid these negative effects, it is
standard that the higher mode controllers be designed first. To demonstrate the accuracy of the
theoretical model, both the frequency response and the time response of the system will be
experimentally measured and predicted through a numerical simulation.
Because tuning of the controller can be most easily seen in the frequency response, we will
begin by comparing the predicted and measured frequency response of the closed loop system.
Typically before multiple modes are controlled it is advantageous to apply control to each mode
separately, thus identifying trends in the filter parameters and modes that may have little
controllability, before compiling the entire group of filters together and trying to tune them.
Therefore, in the following plots between the predicted and measured frequency response, the

133
predicted response was tuned first to obtain the rough location of the experimental parameter
allowing the experimental filters to be quickly adjusted.
First, the frequency response of the active control system when applied to a single mode will
be predicted and compared to the experimental data. Figures 5.9 and 5.10 provide the measured
and predicted closed loop frequency response of the second and first mode compared to the
uncontrolled response of the beam. From these two figures it is evident that the active eddy
current control system can effectively apply vibration suppression to the cantilever beam. The
control system provides the second mode, shown in Figure 5.9, with approximately 29dB
(approximately 96.6% suppression) reduction in vibration and the first mode, shown in Figure
5.11, with approximately 30.5dB (greater than 97% suppression) reduction in vibration. These
results indicate the effectiveness of this new non-contact actuation system. Once the system was
demonstrated to be effective at each frequency, multiple filters were used together in order to
target several frequencies at once. One experiment performed, looked at applying control to the
first three modes of the cantilever beam and compared the measured frequency response to the
response predicted in the numerical simulation of the theoretical model. The three mode
controlled frequency response function for the case that the filter parameters are experimentally
tuned and the case that the filter parameters are tuned in the numerical simulation are compared to
the uncontrolled frequency response in Figure 5.11. The filter parameters used to apply control to
each mode for the theoretical and experimental cases are provided in Table 5.2. This experiment
was performed by tuning the controller parameters in the numerical simulation, then taking the
predicted parameters and applying them to the experimental system. While the predicted and
measured values do not lie directly upon each other, the two tuned responses do fall on top of
each other indicating that the numerical simulation provides a reasonably good prediction of the
maximum vibration suppression that can be achieved. The parameters that provide the maximum
vibration reduction in the theoretical model do not exactly match the experimentally tuned values
for reasons that will be discussed in the subsequent section.
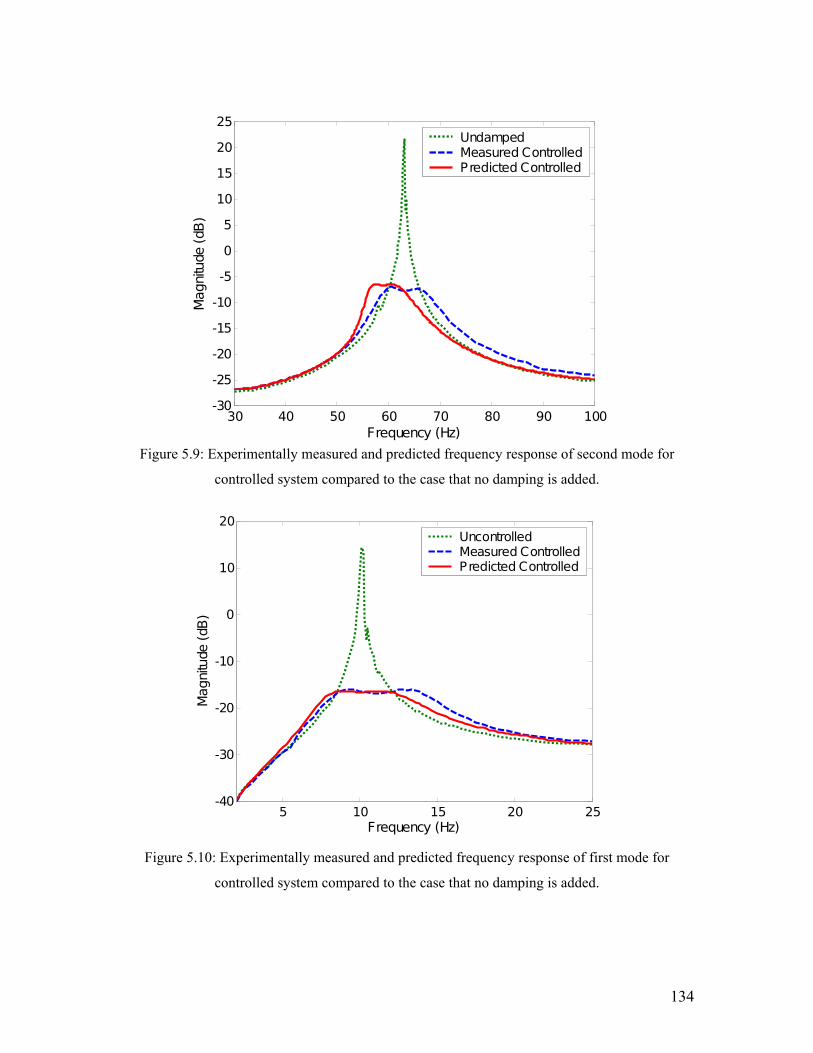
134
30 40 50 60 70 80 90 100-30
-25
-20
-15
-10
-5
0
5
10
15
20
25
Frequency (Hz)
Mag
nitu
de (dB
)
UndampedMeasured ControlledPredicted Controlled
Figure 5.9: Experimentally measured and predicted frequency response of second mode for
controlled system compared to the case that no damping is added.
5 10 15 20 25-40
-30
-20
-10
0
10
20
Frequency (Hz)
Mag
nitu
de (dB
)
UncontrolledMeasured ControlledPredicted Controlled
Figure 5.10: Experimentally measured and predicted frequency response of first mode for
controlled system compared to the case that no damping is added.

135
0 50 100 150 200
-30
-20
-10
0
10
20
30
Frequency (Hz)
Mag
nitu
de (dB
)
UncontrolledMeasured ControlledPredicted Controlled
Figure 5.11: Measured and predicted controlled response of the cantilever beam’s first three
bending modes compared to the uncontrolled case.
Table 5.2: Filter parameters used in the experiments and theory.
First Mode Second Mode Third Mode
Measured Predicted Measured Predicted Measured Predicted
Filter Frequency 1.37xω1 1.06xω1 0. 987xω2 0.875xω2 0.935xω3 0.985xω3
Filter Damping 0.34 0.4 0.1 0.065 0.07 0.07
Filter Gain -4 -25 -0.005 -0.0055 -4 -1.275
Identification of Model Inaccuracy Source
One occurrence that shows some of the system’s dynamics are not modeled is the shift in the
peak of the predicted controlled natural frequency, which can be seen in both Figures 5.9 and
5.11. This type of magnitude shift was also noticed in the experimental study and is documented
in section 5.2.3 and Figure 5.4. However, the shift was evident in the experiments when the
second mode’s filter only had a single free derivative and is present in the theoretical case when
the system has two free derivatives, but not a single. This difference made it apparent that a
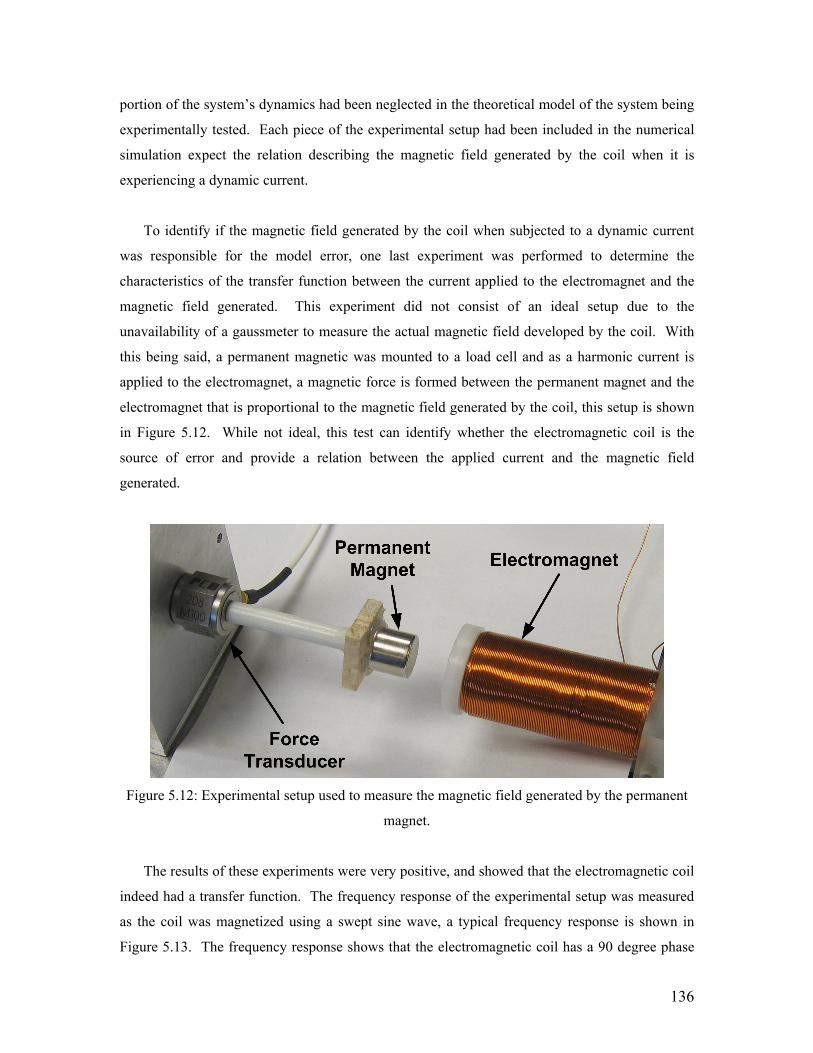
136
portion of the system’s dynamics had been neglected in the theoretical model of the system being
experimentally tested. Each piece of the experimental setup had been included in the numerical
simulation expect the relation describing the magnetic field generated by the coil when it is
experiencing a dynamic current.
To identify if the magnetic field generated by the coil when subjected to a dynamic current
was responsible for the model error, one last experiment was performed to determine the
characteristics of the transfer function between the current applied to the electromagnet and the
magnetic field generated. This experiment did not consist of an ideal setup due to the
unavailability of a gaussmeter to measure the actual magnetic field developed by the coil. With
this being said, a permanent magnetic was mounted to a load cell and as a harmonic current is
applied to the electromagnet, a magnetic force is formed between the permanent magnet and the
electromagnet that is proportional to the magnetic field generated by the coil, this setup is shown
in Figure 5.12. While not ideal, this test can identify whether the electromagnetic coil is the
source of error and provide a relation between the applied current and the magnetic field
generated.
Figure 5.12: Experimental setup used to measure the magnetic field generated by the permanent
magnet.
The results of these experiments were very positive, and showed that the electromagnetic coil
indeed had a transfer function. The frequency response of the experimental setup was measured
as the coil was magnetized using a swept sine wave, a typical frequency response is shown in
Figure 5.13. The frequency response shows that the electromagnetic coil has a 90 degree phase

137
shift, and has a break frequency at 15Hz, after witch the magnetic force generated has 20dB
attenuation per decade as the frequency is increased. These two characteristics of the frequency
response can be modeled as a single pole at 15Hz. Using this result, the dynamics of the
electromagnetic coil can be included in the numerical simulation and the dynamics of the
cantilever beam can be recalculated. However, the measured response shown in Figure 5.13
begins to have other dynamics at approximately 210Hz, which is almost the exact frequency at
which the third mode of the system occurs. Beyond this frequency the magnetic field generated
by the electromagnet cannot be accurately measured without a gaussmeter, thus interfering with
the ability to model the electromagnet at higher frequencies. As was shown previously, the
dynamics of the electromagnetic coil lead to inaccuracies in the model, thus to avoid these
inaccuracies only the first two modes of the structure that lie in the accurate range of the
measured field will be modeled. The frequency responses predicted by the theoretical model
when the dynamics of the electromagnetic coil are included in the simulation, compared to the
measured frequency response, are shown in Figure 5.14. As can be seen in the figure, the model
now more accurately predicts the frequency response and the second mode no longer has a shift
in the magnitude of the controlled response. The filter parameters used to apply control to each
mode for the theoretical model that includes the magnets dynamics, and experiments are provided
in Table 5.3. From this table, it can be seen that all tuned parameters used in the theory are now
almost identical to those used in the experiments. These results indicate that the source of error in
the previously calculated frequency response was due to the phase shift between the current
applied to the coil and the resulting magnetic field.
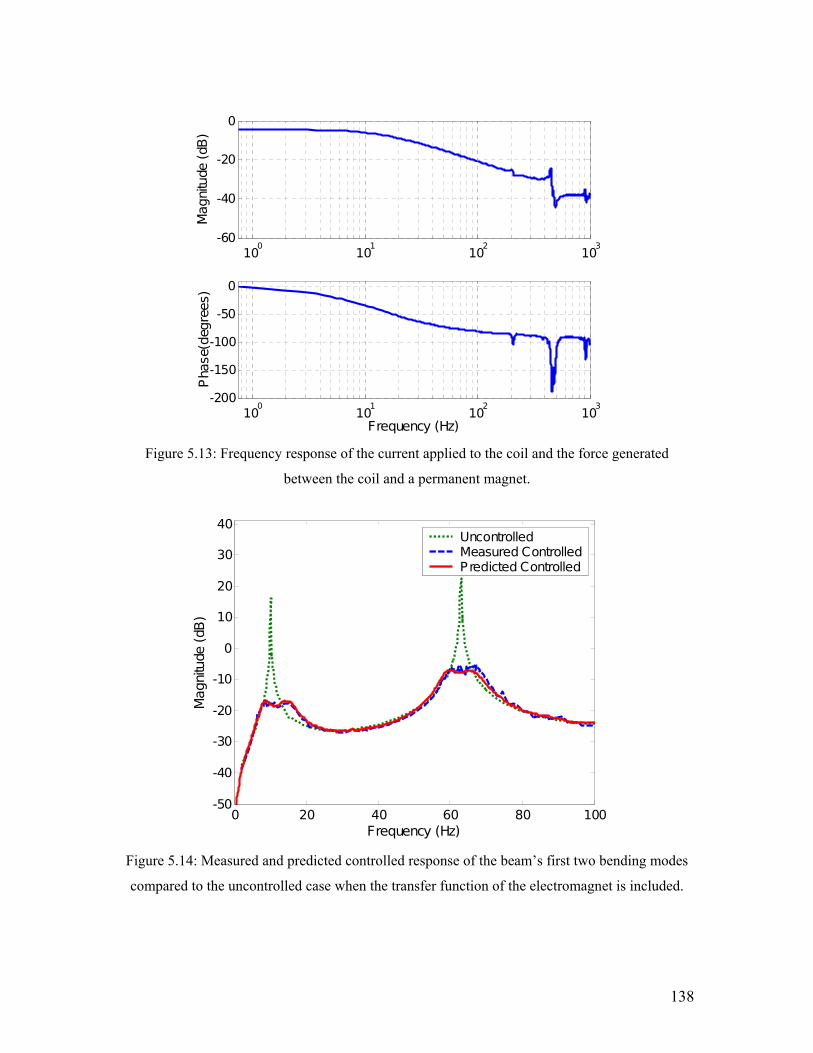
138
100
101
102
103
-60
-40
-20
0
Mag
nitu
de (dB
)
100
101
102
103
-200
-150
-100
-50
0
Frequency (Hz)
Pha
se(d
egre
es)
Figure 5.13: Frequency response of the current applied to the coil and the force generated
between the coil and a permanent magnet.
0 20 40 60 80 100-50
-40
-30
-20
-10
0
10
20
30
40
Frequency (Hz)
Mag
nitu
de (dB
)
UncontrolledMeasured ControlledPredicted Controlled
Figure 5.14: Measured and predicted controlled response of the beam’s first two bending modes
compared to the uncontrolled case when the transfer function of the electromagnet is included.
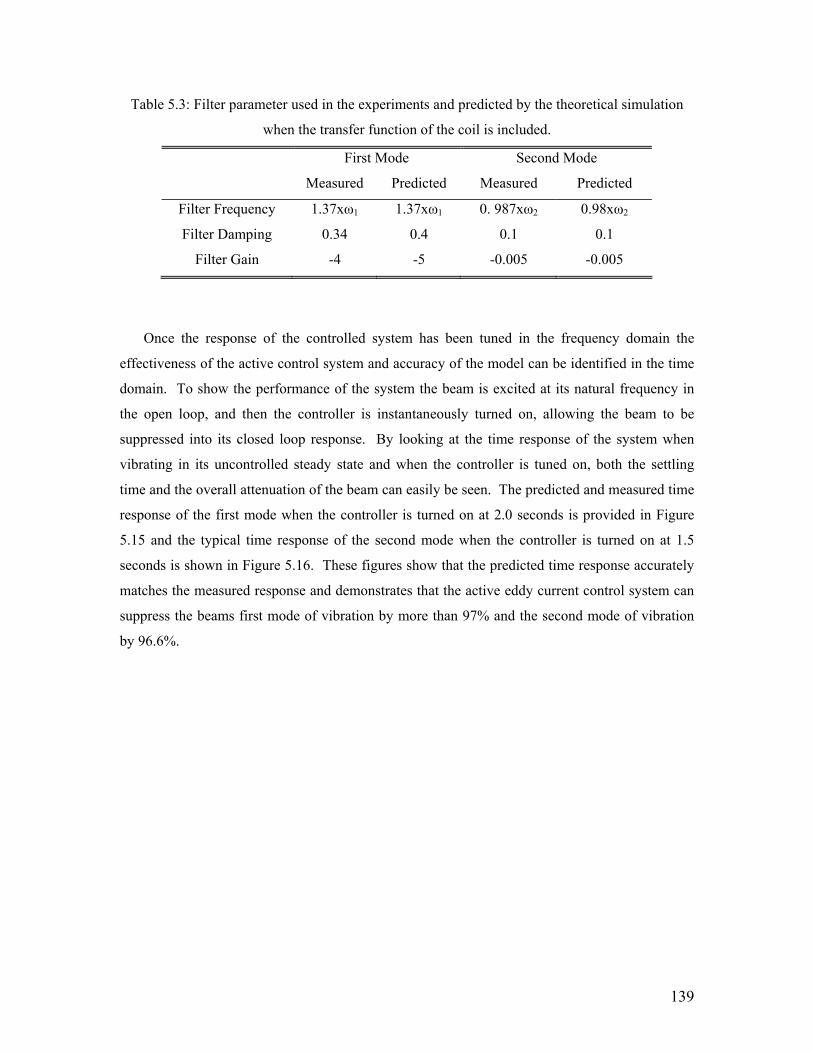
139
Table 5.3: Filter parameter used in the experiments and predicted by the theoretical simulation
when the transfer function of the coil is included.
First Mode Second Mode
Measured Predicted Measured Predicted
Filter Frequency 1.37xω1 1.37xω1 0. 987xω2 0.98xω2
Filter Damping 0.34 0.4 0.1 0.1
Filter Gain -4 -5 -0.005 -0.005
Once the response of the controlled system has been tuned in the frequency domain the
effectiveness of the active control system and accuracy of the model can be identified in the time
domain. To show the performance of the system the beam is excited at its natural frequency in
the open loop, and then the controller is instantaneously turned on, allowing the beam to be
suppressed into its closed loop response. By looking at the time response of the system when
vibrating in its uncontrolled steady state and when the controller is tuned on, both the settling
time and the overall attenuation of the beam can easily be seen. The predicted and measured time
response of the first mode when the controller is turned on at 2.0 seconds is provided in Figure
5.15 and the typical time response of the second mode when the controller is turned on at 1.5
seconds is shown in Figure 5.16. These figures show that the predicted time response accurately
matches the measured response and demonstrates that the active eddy current control system can
suppress the beams first mode of vibration by more than 97% and the second mode of vibration
by 96.6%.

140
0 0.5 1 1.5 2 2.5 3 3.5 4-0.04
-0.02
0
0.02
0.04
Vel
ocity
(m/s
ec)
0 0.5 1 1.5 2 2.5 3 3.5 4-0.04
-0.02
0
0.02
0.04
Time (sec)
Vel
ocity
(m/s
ec) Measured
Predicted
Figure 5.15: Measured and predicted time response of the beam excited at its first bending mode
with the controller turned on at 2.0 seconds.
0 0.5 1 1.5 2 2.5 3-0.2
-0.1
0
0.1
0.2
Vel
ocity
(m
/sec
)
0 0.5 1 1.5 2 2.5 3-0.2
-0.1
0
0.1
0.2
Time (sec)
Vel
ocity
(m
/sec
) Measured
Predicted
Figure 5.16: Measured and predicted time response of the beam excited at its second bending
mode with the controller turned on at 1.5 seconds.
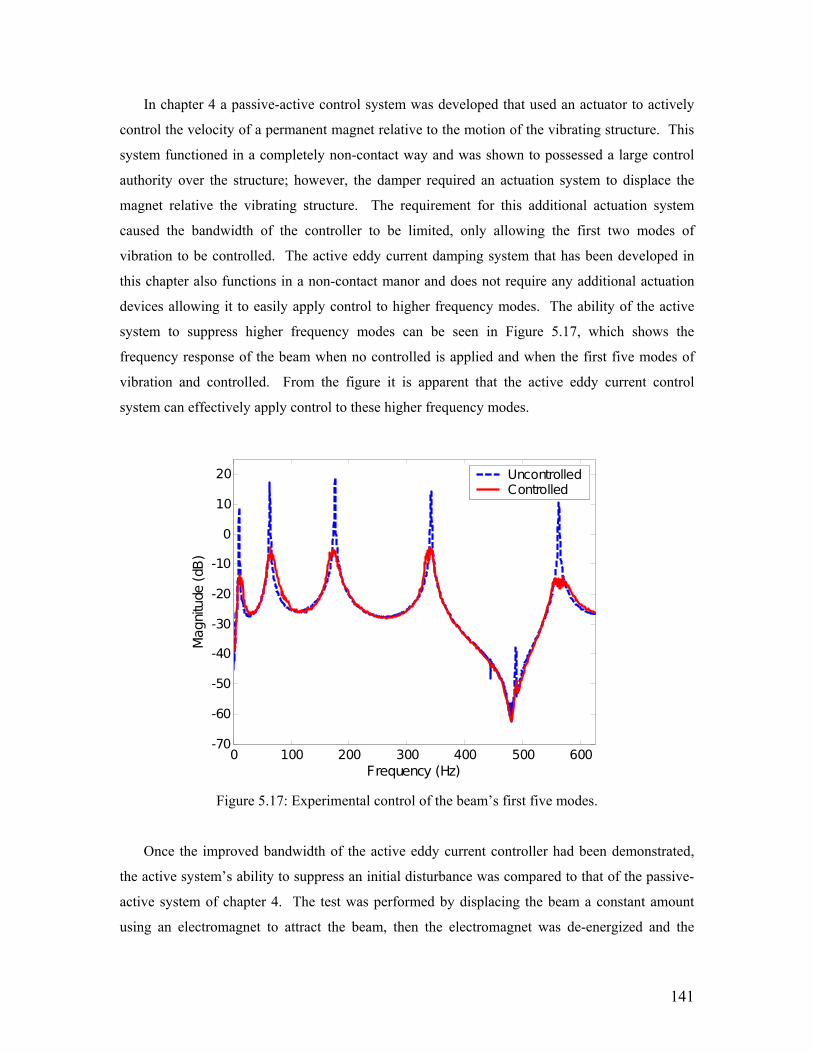
141
In chapter 4 a passive-active control system was developed that used an actuator to actively
control the velocity of a permanent magnet relative to the motion of the vibrating structure. This
system functioned in a completely non-contact way and was shown to possessed a large control
authority over the structure; however, the damper required an actuation system to displace the
magnet relative the vibrating structure. The requirement for this additional actuation system
caused the bandwidth of the controller to be limited, only allowing the first two modes of
vibration to be controlled. The active eddy current damping system that has been developed in
this chapter also functions in a non-contact manor and does not require any additional actuation
devices allowing it to easily apply control to higher frequency modes. The ability of the active
system to suppress higher frequency modes can be seen in Figure 5.17, which shows the
frequency response of the beam when no controlled is applied and when the first five modes of
vibration and controlled. From the figure it is apparent that the active eddy current control
system can effectively apply control to these higher frequency modes.
0 100 200 300 400 500 600-70
-60
-50
-40
-30
-20
-10
0
10
20
Frequency (Hz)
Mag
nitu
de (dB
)
UncontrolledControlled
Figure 5.17: Experimental control of the beam’s first five modes.
Once the improved bandwidth of the active eddy current controller had been demonstrated,
the active system’s ability to suppress an initial disturbance was compared to that of the passive-
active system of chapter 4. The test was performed by displacing the beam a constant amount
using an electromagnet to attract the beam, then the electromagnet was de-energized and the

142
beam was released from its initial displacement and allowed to vibrate freely. Once the beam
begins to vibrate, the controller works to quickly suppress the vibration. A typical experimentally
measured controlled response to an initial condition is shown in Figure 5.18 for both the passive-
active system, and the fully active system. From this figure it can be seen that the active control
system can effectively suppress the vibration of the beam, and that the settling time is comparable
to that of the passive-active damper. Therefore, in addition to having a larger bandwidth than the
passive-active controller, the active system is much smaller and can effectively suppress an initial
disturbance.
0 0.2 0.4 0.6 0.8 1 1.2-1
-0.5
0
0.5
1
1.5
Dis
pla
cem
ent (
mm
)
0 0.2 0.4 0.6 0.8 1 1.2-5
0
5
Time (sec)
Dis
plac
emen
t (m
m)
Active Control
Passive-Active Control
Figure 5.18: Initial displacement response of the beam with the active controller and the passive-
active damper developed in chapter 4.
5.5 Chapter Summary
Eddy currents are formed when a conductive material is subjected to a time varying magnetic
flux. This time changing flux can be formed in various different ways, for instance the eddy
currents used in chapter 2 and 3 were formed due to the motion of the conductor in a static
magnetic field. In chapter 5, the eddy currents are induced by actively varying the current applied

143
to an electromagnet. As the current changes, the magnetic flux is also modified allowing eddy
currents to form in the conductor. By utilizing a sensing system to monitor the vibration of the
beam, a compensator can be applied in the feedback loop to actively control the current applied to
the electromagnet and thus the forces induced on the beam, allowing the vibration to be
suppressed.
This chapter has begun by deriving the equations necessary to determine the eddy currents
induced in the conductive material. For the actuation system considered here, a time changing
magnetic flux is induced on the conductor by two sources. The first is due to the motion of the
conductor in the magnetic field generated by the electromagnet and the second is due to the time
varying current applied to the electromagnetic coil. Once the equations defining the eddy current
density had been derived, the force applied to the structure due to the interaction between the
eddy currents and the applied magnetic field could be found. The equations defining the eddy
current force result in an interesting finding; that the force applied to the beam is at twice the
frequency as the current applied to the electromagnet. This effect, while fascinating, leads to
difficult control issues that arise due to the need for the control force to be at relatively the same
frequency as the structures vibration. However, this means that the current applied to the beam
must be at half the frequency of the sensing signal, which requires an additional transfer function.
Once the issues associated with the frequency doubling affect were identified and corrected, the
control system was formulated. The compensators were designed to be second order filters with a
free derivative in the numerator to account for an integration performed in the algorithm to reduce
the sensing frequency by half.
Subsequent to the identification of an algorithm that easily allowed the frequency of the
sensor signal to be reduced by half, the compensator’s parameters could be tuned. The equations
governing the eddy currents induced in the beam are very nonlinear making them very difficult to
analytically model. Therefore, a numerical simulation of the complete system was performed to
predict the ideal filter parameters to be used in the experiments. Once the filters had been tuned
in the simulation, an experimental setup was constructed that consisted of a cantilever aluminum
beam with an electromagnet positioned a small distance from its surface. The active control
system was implemented using a real time data acquisition system that allowed the filter
parameters to be quickly modified. The parameters predicted in the theoretical model were
initially used in the experiments to obtain the correct location of the parameters and were then
tuned to provide the most vibration suppression.

144
After identifying both the predicted and experimentally tuned filter values, a comparison of
the values revealed a significant amount of variation between the two. Therefore, it was
determined that the numerical simulation of the system had neglected some important dynamics
in the experimental setup. In order to identify the neglected dynamics, the transfer function
between the input and output of each component was measured. These tests showed that the
equipment was all accounted for in the numerical simulation and left only the dynamics of the
electromagnetic coil to blame. The last experiment performed identified the transfer function
between the current applied to the coil and the magnetic field generated. Once this relation was
modeled and included in the simulation, it was found that the predicted filter parameters were
almost identical to the tuned values for in the experiments. This result showed that the dynamics
of the coil could be not neglected. Once the numerical simulation was shown to be accurate, the
performance of the active eddy current control system was identified. It was shown that the
active controller could suppress the cantilever beam’s first mode of vibration by more than 97%
and the second mode by approximately 96.6%. Furthermore, the active system was compared to
the passive-active controller developed in chapter 4. One of the major limitations of the passive-
active control system was that it required an additional actuation device to displace a permanent
magnet relative to the beam. The actuator that was chosen in chapter 4 limited the controller’s
bandwidth to only the first two modes of vibration. Therefore to show the increased bandwidth
of the active system, control was applied to the beam’s first five modes of vibration with an
average attenuation of approximately 25dB. Additionally, it was shown that the active system
could suppress an initial displacement with a comparable settling time.
145
Chapter 6
Conclusions
The optical power of satellites such as the Hubble telescope is directly related to the size of the
primary mirror. However, due to the limited capacity of the shuttle bay, progress towards the
development of more powerful satellites using traditional construction methods has come to a
standstill. Therefore, to allow larger satellites to be launched into space the Air Force, NASA and
DARPA have shown significant interest in the development of ultra large inflatable structures
that can be packaged inside the shuttle bay and then deployed once in space. To facilitate the
packaging of the inflated device in its launch configuration, most structures utilize a thin film
membrane as the optical or antenna surface. Once the inflated structure is deployed in space, it is
subject to vibrations induced mechanically by guidance systems and space debris as well as
thermally induced vibrations from variable amounts of direct sunlight. For the optimal
performance of the satellite, it is crucial that the vibration of the membrane be quickly
suppressed. However, due to the extremely flexible nature of the membrane structure, few
actuation methods exist that avoid local deformation and surface aberrations.
Realizing the severe limitations posed by the presently available actuation techniques, this
dissertation has sought to develop new actuation methods capable of fulfilling the requirements of
inflatable structures. The search for applicable actuation methods has lead to the development of
systems that utilize a variety of active materials such as PZT, terfenol-D, electro-rheological,
magneto-rheological, and shape memory alloys. However, one method of providing vibration
suppression that has not seen significant research is eddy current damping. Dampers of this type
function through the eddy currents that are generated in a conductive material experiencing a time
changing magnetic field. The density of these currents is directly related to the velocity of the
conductor in the magnetic field. However, following the generation of these currents, the internal

146
resistance of the conductor causes them to dissipate into heat. Because a portion of the moving
conductor’s kinetic energy is used to generate the eddy currents, which are then dissipated, a
damping effect occurs. This damping force can be described as a viscous force due its
dependence on the velocity of the conductor.
While eddy currents form an effective method of applying damping, they have normally been
used for magnetic braking applications. Furthermore, the dampers that have been designed for
vibration suppression have typically been ineffective at suppressing structural vibration (Zheng et
al. 2003), incompatible with practical systems, and cumbersome to the structure resulting in
significant mass loading and changes to the dynamic response (Kwak et al. 2004). To alleviate
these issues, this dissertation has identified three previously unrealized damping mechanisms that
function through eddy currents and has developed the necessary modeling techniques required to
design and predict the performance of each. The dampers do not contact the structure, thus,
allowing them to add damping to the system without inducing the mass loading and added
stiffness that are typically common with other forms of damping. The first damping concept is
completely passive and functions solely due to the conductor’s motion in a static magnetic field.
The second damping system is semi-active and improves the passive damper by allowing the
magnet’s position to be actively controlled, thus, maximizing the magnet’s velocity relative to the
beam and enhancing the damping force. The final system is completely active and uses an
electromagnet, through which the current can be actively modified to induce a time changing
magnetic flux on the beam and a controlled damping effect.
6.1 Brief Summary of Dissertation and Results
This dissertation has investigated the development of three new vibration control mechanisms
that function through the eddy currents generated in a conductive material that is subjected to a
time varying magnetic flux. This time varying magnetic flux can be induced on the material in
several different ways, each of which has been used to design a new damping mechanism that has
not been previously demonstrated. In total, three dampers have been designed, modeled and
tested, each showing that it can apply significant damping to a vibrating structure. The first
damper that has been developed is of completely passive nature and does not require any
additional energy to be added into the system. This damping system functions by placing a
permanent magnet a small distance from the vibrating structure. Due to the structure’s vibration

147
in the static magnetic field, it experiences a time changing magnetic flux that induces eddy
currents in the material. The theoretical model necessary to predict eddy currents induced in the
conductor and the damping force generated was developed in chapter 2. Once the damping force
was identified, the eddy current damper was coupled into the equations of motion of both a beam
and a thin membrane under an axial load. This theoretical model was then validated through an
experimental analysis which has been presented in chapter 3. The first structure tested was a
cantilever beam and the results showed that the model could accurately predict the damping
induced on the structure and could apply significant vibration attenuation. For the first bending
mode of vibration, the damping ratio was predicted within 10% over a large range of gaps
between the magnet and the beam. Additionally, it was shown that damper could increase the
damping in the first mode of vibration from 0.2% to approximately 35%, an increase of over 175
times.
After identifying the performance of the passive system using a single magnet, an improved
damping concept was developed in chapter 3. This improved concept consisted of placing a
second magnet on the opposite side of the vibrating structure such that the two magnets had
similar poles facing one another. When two magnets with similar poles are brought into close
proximity, a force is generated due to the compression of the magnetic field in the poling
direction. This compression of the magnetic field results in an increased magnetic flux in the
radial direction and because the eddy current rely on the radial magnetic flux, the damping effect
is enhanced. This new system was modeled using the superposition of the two magnetic fields
and an experimental analysis was performed. The results of the study showed that once again the
model could predict the damping ratio within 10% and that the damper could apply more than
critical damping to the beam.
The last study performed that utilized the purely passive magnetic damper, investigated the
application of damping to a very thin membrane. The membrane structure is difficult to apply
control to due to its extreme flexibility, which causes typically actuation methods to results in
only local deformations. This issue if further complicated by the use of membranes as metrology
surfaces in deployable space structures. In applications such as these, the membrane must uphold
strict surface tolerances to perform optimally. However, the choice of actuation method becomes
very limited due to the bonding of an actuator to the surface of the membrane resulting in surface
aberrations that can hinder its performance. Because eddy current dampers function in a non-
contact manor, they can be utilized while avoiding these issues, thus forming an ideal membrane

148
vibration control mechanism. However, the eddy current damper is highly dependent on the
thickness of the conductive structure, raising the issue of whether sufficient control forces can be
generated in the extremely thin membranes used for space applications. Therefore, the last study
performed in chapter 3 was to identify the eddy current dampers ability to suppress the vibration
of a thin membrane. To do so, an experimental test rig was constructed and the passive damper
was tested at both ambient and vacuum pressure. It was shown that the theoretical model of the
membrane coupled with the eddy current damper could effectively predict the induced damping,
and that the damper could generate approximately 30% damping at ambient pressure and upwards
of 25% damping at vacuum pressures. These results illustrate both the dampers compatibility
with thin membranes and their functionality in high atmospheric and space applications
Subsequent to the development of the passive eddy current damper, a novel damping concept
was developed that combined and active component into the passive system. In the passive
damper the conductor’s motion in a static magnetic field allowed the eddy current to form. The
new passive-active damper functions by providing the magnet with the ability to change its
position relative to the beam, such that the net velocity between the beam and magnet can be
maximized and the damping force enhanced. The density of the eddy currents formed using this
damping system can be modeled in much the same way as the passive system but a feedback
control system must be designed to actively modify the magnet’s position relative to the motion
of the beam. The compensator in the feedback loop was designed to be a second order filter. The
closed loop transfer function of the complete dynamic system was identified and shown to be
stable for a finite range of gains. Following the development of the theoretical closed loop
transfer function, an experiment was developed to validate the model and identify the
performance if the system. To actively displace the magnet, an electromagnetic shaker was used
because it was readily available; however this actuator could only effectively displace the magnet
up to 100Hz, thus limiting control to the first two modes. The results of these experiments
showed that the predicted tuned filter parameters matched those found in the laboratory and that
the measured closed loop frequency response was in excellent agreement with the theory.
Furthermore, it was demonstrated that the passive-active control system could effectively
suppress the vibration of the cantilever beam’s first bending mode by approximately 27dB and
the second bending mode by approximately 25dB.
The third and last eddy current damping mechanism is a completely active control system
that utilizes an electromagnet. In the two previously discussed eddy current dampers, a

149
permanent magnet was used and the eddy currents were induced due to a net velocity between the
structure and the static magnetic field. The active system subjects the conductive material to a
time changing magnetic flux by actively varying the current flowing through an electromagnet,
which allows the intensity of the magnetic field around the conductor to be controlled. The
equations defining the density of the eddy currents formed have been derived for this new damper
in chapter 5. However, because the conductor is also moving or vibration in the time varying
field generated by the electromagnet, both the motional eddy currents and the transformer eddy
currents must be accounted for. The resulting equations identified an interesting effect; that the
force induced on the beam due to the formation of the eddy currents is at twice the frequency of
the current applied to the electromagnet. This frequency doubling effect requires the feedback
control system to divide the sensor signals frequency by half, such that the control current is at
half the sensor frequency and the resulting control force is at the frequency of vibration. An
algorithm to perform this frequency reduction was designed along with a feedback compensator.
Due to the nonlinearities involved with the active control system the closed loop response could
not be analytically solved and required a numerical simulation to be performed.
Following the theoretical development of the system’s closed loop response, experiments
were performed to validate the derived model. The first experiment demonstrated that the
frequency doubling effect did occur, thus validating the correctness of the derived equations.
Next, the transfer function defining the relation between the current applied to the electromagnet
and the resulting magnetic field was experimentally measured and included into the numerical
simulation. With this relationship known, the numerical model was used to predict the tuned
values of the filter parameters, which were then compared to those identified through
experiments. The results showed that when the transfer function defining the coil dynamics was
included into the simulation, the predicted parameters were nearly identical to the measured ones.
The active control system was also shown to effectively suppress the beam’s first mode of
vibration by more than 97% and the second mode of vibration by approximately 96.6%.
Furthermore, the performance of the active eddy current control system was compared to that of
the passive-active system. The results of this comparison showed that the active system could
suppress an initial disturbance with a comparable settling time and that it could apply vibration
control to higher frequency modes (control was applied to the first five bending modes of the
beam with an average suppression of 25 dB), were as the passive-active system was limited by
the actuation system chosen.

150
6.2 Contributions
In most applications, the additional mass and stiffness that are induced due to the use of a
vibration damper, while undesirable are not major design criteria. However, in recent years there
has been a growing interest in the development of ultra large lightweight deployable structures.
Because these structures are deployable, they are packaged in their launch configuration and
deployed once in space. The packaging of the satellite leads to the requirement that the
metrology surface be flexible and has typically been a very thin membrane. Because this
membrane is to be used as a metrology surface it must hold extremely strict surface tolerances
which can easily be exceeded if the membrane is subjected to structural vibrations. This
requirement that the membrane must be free of vibration for it to perform optimally, leads to
difficult control issues brought on by the membranes extremely flexible nature. The extreme
flexibility places severe limitations on the actuation methods compatible with the membrane.
These limitations are due to the fact that the bonding of an actuator to the membrane can result in
surface aberrations and that if a point actuation method were used, only local deformations would
result. The eddy current effect can lead to an ideal damping mechanism, however due to the
ineffectiveness of the previously developed eddy current damping mechanisms; their potential
has not been realized. Therefore, my research has identified three previously unknown methods
of applying damping to a vibrating structure, and has developed the necessary modeling
techniques required to design and predict the performance of each.
This dissertation has developed three new methods of applying vibration suppression to a
structure, each of which has not been previously identified. Each of these dampers functions
through the eddy currents that are formed when a conductive material experiences a time varying
magnetic flux. This time changing magnetic flux can be generated in several different ways, each
of which will be used to identify a new damping mechanism. Because the damping mechanisms
function through magnetic fields, they can be made such that they apply damping forces without
ever coming into contact with the structure, a feature unique to the described eddy current
damper. This property allows the dampers to be applied without inducing mass loading or added
stiffness, which are typical downfalls of other means of damping. Furthermore, the non-contact
properties allow these dampers to be applied to the very thin membranes used in inflatable
satellite applications without causing surface imperfections or localized deformations, which are
unavoidable when using other damping systems, and result in non-optimal performance.
151
The first damper is of completely passive nature that after a thorough literature review was
determined to be the only existing passive non-contact damping system. Most typical eddy
current damping mechanisms have been developed such that the motion of the conductor is
perpendicular to the poling axis of the magnet. This particular configuration, while able to
generated significant damping forces, is not ideal for use in structural vibration applications due
the necessity to fix a cumbersome device to the structure. The passive damper developed in this
dissertation function such that the motion of the conductor is in the poling direction of the
magnet. This subtle difference allows the new damper to be both easily installed into the system
and to apply damping forces in a non-contact manor. Furthermore, this dissertation has derived
and validated the theoretical model necessary to predict the density of the eddy currents formed
and the damping induced on the vibrating structure by the passive system.
Furthermore, this dissertation has developed a second passive damper that can apply
significantly more vibration to the structure by placing a second magnet on the opposite side of
vibrating structure as the first, such that they have similar poles facing each other. This improved
damping concept was theoretically modeled and experimentally validating showing the
significant improvement in damping, and the validity of the model. In addition to developing a
new passive eddy current damper and the necessary theoretical model to predict the systems
interaction with a vibrating structure, the passive damper has been shown to be effective for the
suppression of membrane vibrations. Because the eddy currents induced in the structure are
dependent on the thickness of the conductive material it was questionable as to whether sufficient
damping forces could be generated to suppress the membranes vibration. Through both a
theoretical and experimental evaluation of the damping force induced, it was shown that the
vibration of the structure could be effectively suppressed. This provided the first demonstration
of the compatibility of eddy current damping mechanisms and extremely thin membranes.
Following the development of the new passive damping system, the concept was combined
with an active component to form a novel passive-active damper. The passive-active system
utilizes an actuator and compensator to actively modify the position of the magnet relative to the
vibrating structure. Using this system the net velocity between the magnet and the beam and the
rate of change in the magnetic flux applied to the conducting structure can be controlled such that
the damping force can be maximized. A magnetic damping system that functions by actively
controlling the velocity of a static magnetic field relative the structure has never before been

152
studied, making this system the first of its kind. The passive-active control system has been
analytically modeled using a linearization of the damping force. This model has also been
validated through experiments that showed the model’s linearization to be accurate and the
predicted closed loop dynamics to be extremely well represented by the model. This passive-
active control system also performs in a non-contact fashion making it ideal for use with
lightweight structures.
Lastly, a new completely active damping concept has been developed. This damper works by
controlling the current flowing through an electromagnetic coil such that a time varying magnetic
field is generated. A full theoretical model of this system was derived and revealed an interesting
result that could not be found in the existing literature. It was found that the force induced on the
conductive structure is at twice the frequency as the current applied to the coil. Because this
result had not been shown before, an experiment was performed and demonstrated that it
prediction was correct. Using this concept, a feedback compensator was designed such that it
could reduce the sensing frequency by half and apply control only to a narrow band of
frequencies around a resonant peak. This control system allowed the active eddy current damper
to effectively suppress the vibration of the structure. While a structure subjected to a time
changing magnetic field has been investigated previously (Tani et al. 1990, Morisue 1990, Tsuboi
et al. 1990, Takagi et al. 1992, and Takagi and Tani 1994), the modeling had been performed
using finite elements and was not used for vibration control. Therefore, the theoretical model,
and vibration damping mechanism are both contributions to the field.
This dissertation has made numerous contributions in the design, modeling and development
of new vibration suppression methods. Each of the three dampers developed represents a new
technology and the accompanying modeling techniques provides a method for future researchers
to design the mechanism before its construction. This is a major advance because due to the lack
of design tools currently available, eddy current dampers are built in an ad hoc way causing them
to be expensive to construct. Additionally, the three innovative damping mechanisms that have
resulted from this research apply control forces to the structure without contacting it, which
cannot be done by any other passive vibration control system. The non-contact nature of the
damper allows them to be easily applied while avoiding mass loading and added stiffness, which
is a common downfall of other damping methods. Furthermore, the dampers developed are also
ideal for use in space because they have a low dependence on temperature, are frictionless and
require no maintenance, and use only metallic materials alleviating issue with out gassing a seals

153
that may leak. For these reasons and the non-contact nature of the dampers, they are compatible
with the flexible membranes needed to advance the performance of optical satellites.
6.3 Recommendations for Future Work
This dissertation has developed three new eddy current damping mechanisms, each of which
functions differently. A theoretical model of each damper was derived and experiments were
performed to validate each model. The results of these tests showed that the models accurately
predicted the response of the system. However, because this research has mainly focused on the
design and development of these damping mechanisms, there are still some topics that could be
further researched. In the case of the passive system the model developed should be used to
optimize the design a magnetic damper. An optimization of the damping mechanism would
allow important design criteria to be identified, thus allowing design engineers to select only
important parameters.
In the case of the passive-active and the fully active systems, the damping force induced is
very nonlinear; however a linear compensator was used for the control system, which could
potentially provide less than optimal performance to the nonlinear system. Therefore, it is
necessary that a nonlinear controller be designed for each of these systems to determine if
additional damping could be achieved. In the case of the active system a more accurate
measurement of the relationship between the applied current and the generated magnetic field
should be made to improve the accuracy of the model.
Lastly, each of the damping mechanism should be designed into a two dimensional
membrane system such that the effectiveness of these dampers for the suppression vibration in the
membranes used in inflatable structures can be identified. This final experiment will demonstrate
the functionality of the dampers for space applications provide the ground necessary to pursue
their development further.
154
Bibliography
Agnes, G.S. and Rogers, J.W., 2000, “Piezoelectric Excitation of Inflatable Space Structures for
Modal Testing,” Proceedings of SPIE’s 7th Annual Smart Materials and Structures Conference,
Vol. 3985-88, Newport Beach, CA, pp. 806-819.
Allemang, R.J. and Brown, D.L., 1998, “A unified Matrix Polynomial Approach to Modal
Identification,” Journal of Sound and Vibration, Vol. 211, No. 3, pp. 301-322.
Bae, J.S., Kwak, M.K., and Inman, D. J., 2004, “Vibration Suppression of Cantilever Beam Using
Eddy Current Damper,” Journal of Sound and Vibration, submitted.
Bailey, T. and Hubbard Jr., J.E., 1985, “Distributed Piezoelectric-Polymer Active Vibration
Control of a Cantilever Beam,” Journal of Guidance and Control, Vol. 8, No. 5, pp. 605-611.
Bales, G.L., Hall, J.L., Flint, E.M. and Glease, R.M., 2003, “Experimental Issues that Impact In-
Vacuum Dynamic Characterization of Thin Film Membranes,” AIAA Paper No. 2003-1743,
Proceeding of the 44th AIAA/ASME/ASCE/AHS Structures, Structural Dynamics and Materials
Conference, April 7-10, Norfolk, VA.
Baz, A., Poh, S. and Studer, P., 1987, “Optimum Vibration Control of Flexible Beams by Piezo-
Electric Actuators,” Proceedings of the Sixth VPI & SU/AIAA Symposium on Dynamics and
Control of Large Structures, June 29th-July 1st, Blacksburg, VA, pp. 217-234.
Baz, A. and Poh, S., 2000, “Performance Characteristics of the Magnetic Constrained Layer
Damping,” Shock and Vibration, Vol. 7, pp. 81-90.
155
Blandino, J.R., Pappa, R.S., and Black J.T., 2003, “Modal Identification of Membrane Structures
with Videogrammetry and Laser Vibrometry, AIAA Paper No. 2003-1745, Proceeding of the 44th
AIAA/ASME/ASCE/AHS Structures, Structural Dynamics and Materials Conference, April 7-10,
Norfolk, VA.
Briand, G., Wicks, A.L. and Inman, D.J., 2000, “Vibration Testing for Control of Inflated
Objects,” Proceedings of the 18th International Modal Analysis Conference, San Antonio, Texas,
February.
Cadwell, L.H., 1996, “Magnetic Damping: Analysis of an eddy current brake using an air track,”
Journal of Physics, Vol. 64, pp. 917-923.
Cambell, J.D., 1956, “On the Theory of Initially Tensioned Circular Membranes Subjected to
Uniform Pressure,” Quarterly Journal of Mechanics and Applied Mathematics, Vol. 9, pp. 84-93.
Chein, W.Z., 1948, “Asymptotic behavior of a Thin Clamped Plate under Uniform Normal
Pressure at Very Large Deflection,” Experimental Stress Analysis Part 2, pp. 139-146.
Cheng, D. K., 1992, Field and Wave Electromagnetics, Addison-Wesley Publishing Company.
Chopra, I., 2002, “Review of State of Art Smart Structures and Integrated Systems,” AIAA
Journal, Vol. 40, No. 11, pp. 2145-2187.
Claflin, E.S. and Bareket, N., 1986, “Configuring an Electrostatic Membrane Mirror by Least-
Squares Fitting with Analytically Derived Influence Functions,” Journal of the Optical Society of
America, A. Optical and Image Science, Vol. 3, No. 11, pp. 1833-1839.
Crawley, E. and Anderson, E., 1990, “Detailed Models of Piezoceramic actuation of beams,”
Journal of Intelligent Material Systems and Structures, Vol. 1, No. 1, pp. 4-25.
Crawley, E.F. and de Luis, J., 1985, “Use of Piezo-Ceramics as Distributed Actuators in Large
Space Structure,” Proceeding of the 26th AIAA/ASME/ASCE/AHS Structures, Structural
Dynamics and Materials Conference, April 15-17th, Orlando, Florida, pp. 126-133.
156
Cugat, O., Mounaix, P., Basrour, S., Divoux, C. and Reyne, G., 2000, Deformable Magnetic
Mirror for Adaptive Optics: First Results,” Proceedings of the 13th Annual International
Conference on Micro-Electro-Mechanical Systems, Miyazaki, Japan, pp. 485-490.
Cunningham, R.E., 1986, Passive Eddy current Damping as a Means of Vibration Control in
Cryogenic Turbomachinery,” NASA Technical Paper number NASA-TP-2562, Access No. N86-
24722.
Davis, L.C. and Reitz, J.R., 1971, “Eddy Currents in Finite Conducting Sheets,” Journal of
Applied Physics, Vol. 42, No. 11, pp. 4119-4127.
De Blonk, B., 2003, “Selecting Models to Predict the Optical-Level Behavior of Membrane
Primary Mirrors,” AIAA Paper No. 2003-1653, Proceeding of the 44th AIAA/ASME/ASCE/AHS
Structures, Structural Dynamics and Materials Conference, April 7-10, Norfolk, VA, Vol. 3, pp.
2298-2308.
Dharamsi, U.K., Evanchik, D.M. and Blandino, J.R., 2002, Comparing Photogrammetry with a
Conventional Displacement Measurement Technique on a 0.5m Square Kapton Membrane,”
AIAA Paper No. 2002-1258, Proceeding of the 43th AIAA/ASME/ASCE/AHS Structures,
Structural Dynamics and Materials Conference, April 22-25, Denver, CO.
Dickey, R.W., 1967, “The Plane Circular Elastic Surface under Normal Pressure,” Archives for
Rational Mechanics and Analysis, Vol. 26, pp. 219-236.
Divoux, C., Cugat, O., Basrour, S., Mounaix, P., Kern, P. and Boussey-Saïd, J., 1998,
“Miniaturized Deformable Magnetic Mirror for Adaptive Optics,” Proceedings of the SPIE
Conference on Adaptive Optical System Technologies; Part 2, Kona, HI, USA, Vol. 3353, No. 2,
pp. 850-857.
Fanson, J.L. and Caughey,T.K., 1987, “Positive Position Feedback Control for Large Space
Structures,” AIAA Paper No. 87-0902, Proceeding of the 28th AIAA/ASME/ASCE/AHS
Structures, Structural Dynamics and Materials Conference, April 9-10th, Monterey, CA, pp. 588-
598.

157
Flint, E.M. and Glease, R.M., 2001, “Characterization, Prediction, and Improvement of Stretched
Flat Hexagonal Gossamer Membrane Dynamic Response,” AIAA Paper No. 2001-1410,
Proceeding of the 42nd AIAA/ASME/ASCE/AHS Structures, Structural Dynamics and Materials
Conference, April 16-19, Seattle, WA, USA.
Flint, E., Bales, G., Glease, R. and Bradford, R., 2003, “Experimentally Characterizing the
Dynamics of 0.5m+ Diameter Doubly Curved Shells Made from Thin Films, AIAA Paper No.
2003-1831, Proceeding of the 44th AIAA/ASME/ASCE/AHS Structures, Structural Dynamics
and Materials Conference, April 7-10, Norfolk, VA, USA.
Fredrick, J.R. and Darlow, M.S., 1994, “Operation of an electromagnetic Eddy Current Damper
wit a Supercritical Shaft,” ASME Journal of Vibration and Acoustics, Vol. 116, No. 4, pp. 578-
580.
Freeland, R.E., Bilyeu, G.D. Veal, G.R., Steiner, M.D. and Carson, D.E., 1997, “Large Inflatable
Deployable Antenna Flight Experiment Results,” Acta Astronautica, Vol. 41, No. 4-10. pp. 267-
277.
Freeland, R.E., Bilyeu, G.D. Veal, G.R. and Mikulas, M.M., 1998, “Inflatable Deployable Space
Structures Technology Summary,” International Astrological Association.
Fung, R-F., Sun, J-H. and Hsu, S-M., 2002, “vibration control of the Rotating Flexable-
Shaft/Multi-Flexable-Disk System with the Eddy-Current Damper,” ASME Journal Of Vibrations
and Acoustics, Vol. 124, pp. 519-526.
Graves, K.E., Toncich, D. and Ionvenitti, P.G., 2000, “Theoretical Comparison of the Motional
and Transformer EMF Device Damping Efficiency,” Journal of Sound and Vibration, Vol. 233,
No. 3, pp. 441-453.
Greschik, G., Mikulas, M.M. and Palisoc, A., 1998, Approximations and Errors in Pressurized
Axisymmetric Membrane Shape Predictions,” AIAA Paper No. 1998-2101, Proceeding of the
39th AIAA/ASME/ASCE/AHS Structures, Structural Dynamics and Materials Conference, Long
Beach, CA, USA, Vol. 4, pp. 2761-2771

158
Griffith, D.T. and Main, J.A., 2000, “Modal Testing of an Inflated Thin Film Polymide Torus
Structure,” Proceedings of the 18th International Modal Analysis Conference, San Antonio,
Texas, Febuary.
Grosso, Ronald P. and Yellin, Martin, 1977, “The membrane Mirror as an Adaptive Optical
Element,” Journal of the Optical Society of America, Vol. 67, No. 3, pp. 399-406.
Gunter, E.J., Humphris, R.R. and Severson, S.J., 1983, “Design Study of Magnetic Eddy-Current
Vibration Dampers for Application to Cryogenic Turbomachinery,” University of Virginia Report
UVA/528210/MAE84/101, NASA Grant NAG-3-263.
Hagood, N.W., Chung, W.H. and Von Flotow, A. 1990, “Modeling of Piezoelectric Actuator
Dynamics for Active Structural Control,” Journal of Intelligent Materials Systems and Structures,
Vol. 1, pp. 327-354.
Hahn, K.D., Johnson, E.M., Brokken, A. and Baldwin, S., 1998, “Eddy Current Damping of a
Magnet Moving Through a Pipe,” American Journal of Physics, Vol. 66, No. 12, pp. 1066-1076.
Hall J., Glease, R.M. and Flint, E., 2002, “Dynamic Behavior of Thin Film Membranes,” AIAA
Paper No. 2002-1378, Proceeding of the 43rd AIAA/ASME/ASCE/AHS Structures, Structural
Dynamics and Materials Conference, April 22-25th, Denver, CO.
Hanagud, S., Obal, M.W. and Meyyappa, M., 1985, “Electronic Damping Techniques and Active
Vibration Control,” AIAA Paper No. 85-0752, Proceeding of the 26th AIAA/ASME/ASCE/AHS
Structures, Structural Dynamics and Materials Conference, April 15-17th, Orlando, FL, pp. 126-
133.
Heald, M.A., 1988, “Magnetic Braking Improved theory,” American Journal of Physics, Vol. 56,
No. 6, pp.521-522.
Huang, S.C., Inman, D.J. and Austin, E.M., 1996, “Some Design Considerations for Active and
Passive Constrained Layer Damping Treatments,” Smart Structures and Materials, Vol. 5, pp.
301-313.
159
Juang J.N. and Hunag, W., 1983, “Static Shape Forming for an Electrostatically Controlled
Membrane Miror,” Proceedings of the American Control Conference, Vol. 3, pp. 1310-1316.
Jagourel, R., Madec, P. and Sechaud, M., 1990, “Adaptive Optics: A Bimorph Mirror for
Wavefront Correction,” Proceeding of the SPIE conference on Amplitude and Intensity Spatial
Interferometry, Tucson, AR, USA, Vol. 1237, pp. 394-405.
Jenkins, C.H., Wilkes, J.M. and Marker, D.K., 1998, “Improved Surface Accuracy of Precision
Membrane Reflectors Through Adaptive Rim Control,” AIAA Paper No. 1998-1983, Proceeding
of the 39th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials
Conference, Long Beach, CA, Vol. 3 pp. 2302-2308
Jenkins, C.H., 2001, “Gossamer Spacecraft: Membrane and Inflatable Structures Technology for
Space Applications,” American Institute of Aeronautics and Astronautics (AIAA), Reston, VA.
Kao, R., and Perrone, N., 1971, “Large Deflections of Axisymmetric Circular Membranes,”
International Journal of Solids and Structures, Vol. 7, pp. 1601-1612.
Kao, R., and Perrone, N., 1972, “Large Deflections of Flat Arbitrary Membranes,” Computers
and Structures, Vol. 2, pp. 535-546.
Karnopp, M., 1989, “Permanent Magnet Linear Motors Used as Variable Mechanical Damper for
Vehicle Suspensions,” Vehicle System Dynamics, Vol. 18, pp. 187-200.
Kienholtz, D.A., Pendleton, S.C., Richards, K.E. and Morgenthaler, D.R., 1994, “Demonstration
of Solar Array Vibration Suppression,” Proceedings of SPIE’s Conference on Smart Structures
and Materials, Orlando, FL, Feb. 14-16, Vol. 2193, pp. 59-72.
Kienholtz, D.A., Smith, C.A. and Haile, W.B., 1996, “A Magnetically Damped Vibration
Isolation System for a Space Shuttle Payload,” Proceeding of SPIE’s International Symposium on
Smart Structures and Materials, San Diego, CA, Vol. 2720, pp. 272-280.
160
Klingerman, Y., Gottlieb, O. and Darlow, M.S., 1998a, “Analytic and Experimental Evaluation of
Instability in Ratordynamic System wit Electromagnetic Eddy-Current Damper,” ASME Journal
of Vibrations and Acoustics, Vol. 120, pp. 272-278.
Klingerman, Y., Gottlieb, O. and Darlow, M.S., 1998b, “Nonlinear Vibration of a Rotating
System with an Electromagnetic Damper and a Cubic Restoring Force,” Journal of Sound and
Vibration, Vol. 4, pp. 131-144.
Kligerman, Y. and Gottlieb, O., 1998, “Dynamics of a Rotating System with a Nonlinear Eddy-
Current Damper,” Transactions of the ASME Journal of Vibration and Acoustics, Vol. 120, pp.
848-853.
Kobayashi, H. and Aida, S., 1993, Development of a Houde Damper using Magnetic Damping,”
Proceedings of the 14th Biennial ASME Conference on Vibration and Noise, Albuquerque, NM,
USA, Vol. 62, pp. 25-29.
Kwak, M.K., Lee, M.I. and Heo, S., 2003, “Vibration Suppression Using Eddy Current Damper,”
Korean Society for Noise and Vibration Engineering, in press.
Larose, G.L., Larsen, A. and Svensson, E., 1995, “Modeling of Tuned Mass Dapers for Wind
Tunnel Tests on a full-bridge areoelastic model,” Journal of Wind Engineering and Industrial
Aerodynamics, Vol. 54/55, pp. 427-437.
Lee, C.K., Chiang, W.W. and O’Sullivan, T.C., 1989, “Piezoelectric Modal Sensors and
Actuators Achieving Critical Active Damping on a Cantilever Plate,” AIAA Paper No. 89-1390-
CP, Proceeding of the 30th AIAA/ASME/ASCE/AHS Structures, Structural Dynamics and
Materials Conference, Mobile, Alabama, April 3-5th, pp. 2018-2026.
Lee, J.S., 1996, “Dynamic Stability of Beam Plates in Transverse Magnetic Fields,” Journal of
Engineering Mechanics, Vol. 122, No. 2, pp. 89-94.
Lee, K. and Park, K., 1999, “Optimal Robust Control of a Contact-less Brake System using an
Eddy Current, Mechatronics, Vol. 9 No. 6, pp. 615-631.

161
Lee, K. and Park, K., 2001a, “Modeling of the Eddy Currents with the Consideration of the
induced Magnetic Flux,” Proceeding of the IEEE International Conference on Electric and
Electronic Technology, Vol. 2, pp. 762-768.
Lee, K. and Park, K., 2001b, “Eddy Currents Modeling with the Consideration of the Magnetic
Reynolds Number,” Proceeding of the International Symposium on Industrial Electronics, Pusan,
South Korea, June 12-16, Vol. 1, pp. 678-683.
Lee, K. and Park, K., 2002, “Modeling Eddy Currents with Boundary Conditions by Using
Coulomb’s Law and the method of Images,” IEEE Transactions on Magnetics, Vol. 38, No. 2,
pp. 1333-1340.
Leigh, L., Hamidzadeh, H., Tinker, M. and Slade, K.N., 2001, “Dynamic Characterization of an
Inflatable Concentrator for Solar Thermal Propulsion,” AIAA Paper No. 2001-1406, Proceeding
of the 42nd AIAA/ASME/ASCE/AHS/ASC Structure, Structural Dynamics, and Material
Conference and Exhibit, Seattle, WA, April 16-19.
Main, J.A., Martin, J. and Nelson, G., 1999, “Noncontact Shape Control of Membrane Mirrors,”
Proceedings of the Ultra Lightweight Space Optics Challenge Workshop, Napa, CA, March 24–
25.
Marker, D.K. and Jenkins, C.H., 1997, “Surface Precision of Optical Membranes with
Curvature,” Optics Express, Vol. 1, No. 11, pp. 324-331.
Marker, D.K., Carreras, J.M., Wilkes, J.M., Jenkins, C.H., Duneman, D., Rotge, J.R. and Hogge,
C.B., 1998, “Optical Evaluation of Membrane Mirrors with Curvature,” Proceeding of the SPIE
Conference on Adaptive Concepts and Innovative Supporting Technologies for Large-Aperture
Imaging System, San Diego, CA, Vol. 3430, pp. 202-208.
Matsuzaki, Y., Ishikubo, Y., Kamita, T., and Ikeda, 1997, “Vibration Control System Using
Electromagnetic Forces,” Journal of Intelligent Material Systems and Structures, Vol. 8, pp. 751-
756.

162
Matsuzaki, T., Ikeda, T., Nae, A. and Sasaki, T., 2000, “Electromagnetic Forces for a New
Vibration Control System: Experimental Verification,” Smart Materials and Structures, Vol. 9,
No. 2, pp. 127-131.
Merkle, F., Freischalad, K. and Bille, J., 1981, “Development of an Active Optical Mirror for
Astronomical Application,” Presented at the ESO Conference on Scientific Importance of High
Angular Resolution at Infrared and Optical Wavelengths, Garching, Germany, March.
Morisue, T., 1990, “Analysis of a Coupled Problem: The Felix Cantilevered Beam,” IEEE
Transactions on Magnetics, Vol. 26, No. 2, pp. 540-543.
Nagaya, K., Kojima, H., Karube, Y. and Kibayashi, 1984, “Braking Force and Damping
Coefficient of Eddy Current Brakes Consisting of Cylindrical Magnets and Plate Conductors of
Arbitrary Shape,” IEEE Transactions on Magnetics, Vol. MAG-20, No. 6, pp. 2136-2145.
Oh, L., Ruzzene, M. and Baz, A., 1999, “Control of the Dynamic Characteristics of Passive
Magnetic Composites,” Composites Part B: Engineering, Vol. 30, pp. 739-751.
Oh, L., Poh, S., Ruzzene, M. and Baz, 2000, “Vibration Control of Beams Using Electro-
Magnetic Compressional Damping Treatment,” ASME Journal Vibration and Acoustics, Vol.
122, pp. 235-243.
Omer, A. and Baz, A., 2000, “Vibration Control of Plates Using Electromagnetic Compressional
Damping Treatment, Journal of Intelligent Material Systems and Structures, Vol. 11, pp. 791-
797.
Pappa, R.S., Giersch, L.R. and Quagliaroli, J.M., 2001, “Photogrammetry of a 5m Inflatable
Space Antenna with Consumer Digital Cameras,” Experimental Techniques, July/Aug. pp. 21-29.
Pappa, R.S., Jones, T.W., Black, J.T., Walford, A., Robson, S. and Shortis, M.R., 2002,
“Photogrammetry Methodology Development for Gossamer Spacecraft Structures,” Sound and
Vibration, Vol. 36, No. 8, 2002, pp. 12-21.

163
Pappa, R.S., Black, J.T., Blandio, J.R., Jones, T.W., Danehy, P.M. and Dorrington, A.A., 2003,
Dot-Projection Photogrammetry and Videogrammetry of Gossamer Space Structures,” Journal of
Spacecraft and Rockets, Vol. 40, No. 6, pp. 858-867.
Park, G., Kim, M.H. and Inman, D.J., 2001, “Integration of Smart Materials into Dynamics and
Control of Inflatable Space Structures,” Journal of Intelligent Materials Systems and Structures,
Vol. 12, No. 6, pp. 423-433.
Park, G., Ruggiero, E. and Inman, D.J., 2002, “Dynamic Testing of Inflatable Structures Using
Smart Materials,” Journal of Smart Materials and Structures, Vol. 11, pp. 1-9.
Perkins, W.P. and Rohniger, G., June 6, 1978, “Controlled Flexible Membrane Reflector,” U.S.
Patent Number 4,093,351.
Preliminary Mission Report, “Spartan 207/Inflatable Antenna Experiment Flown on STS-77,”
Spartan Project, Code 740.1, NASA Gaddard Space Flight Center, Greenbelt, MD, Febuary 14,
1997.
Rogers, J.W. and Agnes, G.S., 2002, “Modeling a Piezothermoeleastic Beam String,” Journal of
Spacecraft and Rockets, Vol. 39, No. 5, pp. 725-731.
Rogers, J.W. and Agnes, G.S., 2002, “Modeling a Piezothermoelastic Laminated Plate-
Membrane,” Journal of Intelligent Material Systems and Structures, Vol. 13, No. 5, pp. 303-316.
Rodgers, J.W. and Agnes, G.S., 2002, “Formulation of Asymptotic Finite Elements sing the
Method of Integral Multiple Scales,” AIAA Paper No. 2002-1663, Proceeding of the 43rd
AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference,
AIAA Gossamer Spacecraft Forum, April 22-25, Denver, CO.
Rogers, J.W. and Agnes, G.S., 2003, “Modeling Discontinuous Axisymmetric Active Optical
Membranes,” Journal of Spacecraft and Rockets, Vol. 40, No. 4, pp. 553-564.
Ruggiero, E., Park, G., Inman, D.J. and Main, J.A., 2002, “Smart Materials in Inflatable Structure
Applications,” AIAA Paper No. 2002-1563, Proceeding of the 43rd

164
AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference,
AIAA Gossamer Spacecraft Forum, April 22-25, Denver, CO.
Ruzzene, M., Oh, J. and Baz, A., 2000, “ Finite Element Modeling of Magnetic Constrained
Layer Damping, Journal of Sound and Vibration, Vol. 236, No. 4, pp. 657-682.
Schieber, D., 1974, “Braking Torque on Rotating Sheet in Stationary Magnetic Field,”
Proceedings of the Institution of Electrical Engineers, Vol. 121, No. 2, pp. 117-122.
Schieber, D., 1975, “Optimal Dimensions of Rectangular Electromagnet for Braking Purposes,”
IEEE Transactions on Magnetics, Vol. 11, No. 3, pp. 948-952.
Schmid, M. and Varga, P., 1992, “Analysis of Vibration-Isolating Systems for Scanning
Tunneling Microscopes,” Ultramicroscopy, Vol. 42-44, Part B, pp. 1610-1615.
Schmidt, R., 1974, “On Berger’s Method in the Non-Linear Theory of Plates,” Journal of Applied
Mechanics, Vol. 41, pp. 521-523.
Schmidt, R., and DaDeppo, D.A., 1974, “A New Approach to the Analysis of Shells, Plates and
Membranes with Finite Deflections,” International Journal of Non-Linear Mechanics, Vol. 9, pp.
409-419.
Shaker, F.J., 1975, “Effect of Axial Load on Modes and Frequencies of Beams,” NASA
Technical Note D-8109.
Shaw, F.S., Perrone, N., 1954, “A Numerical Solution for the Non-Linear Deflection of
Membranes,” Journal of Applied Mechanics, Vol. 21, pp. 117-128.
Simeu, E. and Georges, D., 1996, “Modeling and Control of an Eddy Current Brake,” Control
Engineering Practice, Vol. 4, No. 1, pp. 19-26.
Slade, K.N., Tinker, M.L., Lassiter, J.O. and Engberg, R., 2001, “Dynamics of an Inflatable
Structure in Vacuum and Ambient Conditions,” AIAA Journal, Vol. 39, No. 5, pp. 894-901.

165
Sodano, H.A., Park, G. and Inman, D.J., 2004, Multiple Sensors and Actuators for Vibration
Suppression of an Inflated Torus, AIAA Journal of Rockets and Spacecraft, Vol. 42, No. 2.
Solter, M.J., Horta, L.G. and Panetta, A.D., 2003, “A Study of a prototype Actuator Concepts for
Membrane Boundary Control,” AIAA Paper No. 2003-1736, Proceeding of the 43rd
AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference,
AIAA Gossamer Spacecraft Forum, April 7-10, Norfolk, VA.
Sommerfeld, A., 1889, Proceedings of the London Mathematical Society, Vol. 28, pp. 395.
Takagi, T., Tani, J., Matsuda, S., and Kawamura, S., 1992, “Analysis and Experiment of
Dynamic Deflection of a Thin Plate with a Coupling Effect,” IEEE Transactions on Magnetics,
Vol. 28, No. 2, pp. 1259-1262.
Takagi, T. and Tani, J., Dynamic Behavior of a Plate in Magnetic Field by Full Coupling and
MMD Methods, IEEE Transactions on Magnetics, Vol. 30, No. 5, pp. 3296-3299.
Talami, H. and Iye, M., 1994, “Membrane Deformable Mirror for SUBARU Adaptive Optics,”
Proceedings of the SPIE Conference on Adaptive Optics in Astronomy, Vol. 2201, pp. 762-767.
Tani, J., Minagawa, M., Ohtomo, K. and Saigo, M., 1990, “Dynamic Behavior of Thin Plates
under Impulsive Magnetic Field,” IEEE Transactions on Magnetics, Vol. 26, No. 2, pp. 544-547.
Teshima H., Tanaka, M., Miyamoto,K., Nohguchi, K. and Hinata, K., 1997, “Effect of Eddy
Current Dampers on the Vibrational Properties in Superconducting Levitation Using Melt-
Processed YBaCuO Bulk Superconductors,” Physica C, Vol. 274, pp. 17-23.
Thomas, M. and Veal, G., 1984, “Highly Accurate Inflatable Reflectors,” AFRPL TR-84-021.
Tinker, M.L., 1998, “Passively Adaptive Inflatable Structure for the Shooting Star Experiment,”
AIAA paper No. 98-1986, pp. 2320-2326.
166
Tsubi, H., Tanaka, M. and Misaki, T., 1990, “Eddy current and Deflection Analysis of a thin
Plate in Time-Changing Magnetic Fields,” IEEE Transactions on Magnetics, Vol. 26, No. 5, pp.
1647-1649.
Wagner, J., 2000, “Optical Metrology of Adaptive Membrane Mirrors,” M.S. Thesis, U.S. Air
Force Institute of Technology, Wright-Patterson AFB, OH.
Weil, N.A. and Newmark, N.M., 1955, “Large Plastic Deformations of Circular Membranes,” Journal of Applied Mechanics, Vol. 22, pp533-538.
Wiederick, H.D., Gauthier, N., Campbell, D.A. and Rochon, P., 1987, “Magnetic Braking:
Simple theory and experiment,” American Journal of Physics, Vol. 55, No. 6, pp. 500-503.
Wouterse, J.H., 1991, “Critical Torque and Speed of Eddy Current Brake with Widley Seperated
soft Iron Poles,” IEE Proceedings. Part B, Electric Power Applications, Vol. 138, No. 4, pp. 153-
158.
Zheng, X.J., Zhou, Y.-H. and Miya, K., 2001, “An Analysis of Variable Magnetic Damping of a
Cantilever Beam-Plate with end coils in Transverse Magnetic Fields,” Fusion Engineering and
Design, Vol. 55, pp. 457-465.
Zheng, H., Li, M. and He, Z., 2003, “Active and Passive Magnetic Constrained Damping
Treatment,” International Journal of Solids and Structures, Vol. 40, pp. 6767-6779.
167
Appendix A
Elliptic Integrals Associated with the Magnetic Flux of a
Cylindrical Permanent Magnet

168
The integrals defining the magnetic flux density of the cylindrical permanent magnet are
derived in chapter 2 and contain the elliptical integrals provided below. These integrals are too
difficult to solve analytically and must therefore be computed using numerical integration
techniques. The magnetic flux density in the y-direction defined in equation 2.10 contains the
integration I1 defined by
( )
⎥⎦
⎤⎢⎣
⎡
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ −
+⎟⎠⎞
⎜⎝⎛ −
−⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ −
+⎟⎠⎞
⎜⎝⎛ −
=
−+= ∫
22222
21212
2
2
0 2322
1
4,4
34,4
4,4
34,4
1
sin2
sin
nybE
nybEp
nybE
nybEm
bynp
dybzb
I
ππππ
φφ
φπ
(A1)
where terms m2, n2 and p2 are defined as
2222 zybm ++= (A2)
( ) 222 zybn +−= (A3)
( ) 22 zybp ++= (A4)
where b is the radius of the permanent magnet and y and z are the position in the radial and poling
directions, respectively. The elliptic integrals of equation A1 are written as
( ) ( )∫ −==φ
θθφ0
2121 sin1, dmmE (A5)
( ) ( )∫−
−==φ
θθφ0
2122 sin1, dmmE (A6)
The magnetic flux density in the z-direction defined in equation 2.11 contains the integration I2
defined as
( )
⎥⎦
⎤⎢⎣
⎡
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ −
+⎟⎠⎞
⎜⎝⎛ −
+⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛ −
+⎟⎠⎞
⎜⎝⎛ −
=
−+
−= ∫
22222
21212
2
0 2322
2
4,4
34,4
4,4
34,4
1
sin2
sin
nybE
nybEp
nybE
nybEs
bnp
dybzb
ybI
ππππ
φφ
φπ

169
(A7)
where terms m2, n2, p and s are defined as
2222 zybm ++= (A8)
( ) 222 zybn +−= (A9)
( ) 22 zybp ++= (A10)
222 zybs −−= (A11)
where b is the radius of the permanent magnet and y and z are the position in the radial and poling
directions, respectively. The elliptic integrals of equation A7 are written as
( ) ( )∫ −==φ
θθφ0
2121 sin1, dmmE (A12)
( ) ( )∫−
−==φ
θθφ0
2122 sin1, dmmE (A13)
170
Vita
Henry A. Sodano was born on October, 4 1979 to parents Henry and Peggy Sodano in
Fairfax, Virginia. He graduated from Robinson Secondary School in June 1998 and began his
first year of collage with a major of Mechanical Engineering at Virginia Tech in August of that
year. Following four years of undergraduate study, he received his Bachelors of Science in
Mechanical Engineering in May of 2002. After the completion of his undergraduate program he
was invited to perform summer research at the Center for Intelligent Material Systems and
Structures (CIMSS) at Virginia Tech. The work that he performed during that summer, earned
him a graduate research position, and he began work on his master’s degree in the fall of 2002
under the direction of Dr. Daniel J. Inman. His research focus was in vibration control of
inflatable space structures and power harvesting using piezoelectric materials. In April of 2003
during the pursuit of his mater’s degree, Henry was awarded a NASA Graduate Student Research
Program fellowship (GSRP) to fund his efforts towards a Doctorate of Philosophy in Mechanical
Engineering beginning in August of 2003. He completed his Master of Science in Mechanical
Engineering on July 31st 2003, and began to work towards a Ph.D at Virginia Tech. The topic of
his Ph.D research has been in the development of vibration suppression mechanisms compatible
with the extremely thin membranes used with deployable satellites. After performing research in
the topic for approximately 21 months his research had lead to the development of three new
actuation methods, each of which applied control forces without contacting the structure.
Following the completion of his Ph.D, Henry looks forward to obtaining a faculty position in the
Mechanical Engineering Department at Michigan Technological University.
Postal Address:
310 Durham Hall
Virginia Tech mail code 261
Blacksburg, VA 24061