detector de fluorescencia en el …users.df.uba.ar/leoni/auger.pdf · trabajo en el shift 3.-...
TRANSCRIPT

1
DETECTOR DE FLUORESCENCIA EN EL
OBSERVATORIO PIERRE AUGER
Laboratorio 6 y 7, Fac. de Cs. Exactas y Naturales, Universidad de Buenos Aires.
14 de Diciembre de 2006.
Yann Guardincerri
Matías Leoni Olivera
Profesor: Hernan Bonadeo
Director: Julio Rodríguez Martino
…
2
INDICE
1.- Introducción
1.1.- Motivación
1.2.- Observatorio Pierre Auger y EAS
1.3.- Nuestra Tarea
2.- Detector de Fluorescencia
2.1.- Introducción
2.2.- Armado de las Camaras
2.3.- Calibración Absoluta (DRUM)
2.4.- Roving Laser
2.5.- Trabajo en el Shift
3.- Modificación al T3
4.- Detector LIDAR
4.1.- Introducción
4.2.- Operación del LIDAR
5.- Detector de superficie
5.1.- Introducción
5.2.- Erosión
6.- Conclusiones
7.- Referencias
8.- Agradecimientos
APÉNDICE A
… Pág. 3
… Pág 3
… Pág 4
… Pág 7
… Pág 7
… Pág 7
… Pág 8
… Pág 12
… Pág 14
… Pág 17
…Pág 22
…Pág 23
… Pág 23
… Pág 26
…Pág 29
… Pág 29
… Pág 29
…Pág 31
…Pág 32
…Pág 32
…Pág 33 … a 41
3
1.- Introducción
1.1.- Motivación
La atmósfera terrestre es continuamente bombardeada por partículas relativistas
que provienen de diferentes fuentes extraterrestres. A estas partículas se las llama rayos
cósmicos. Las energías que pueden tener barren más de 10 órdenes de magnitud, pero el
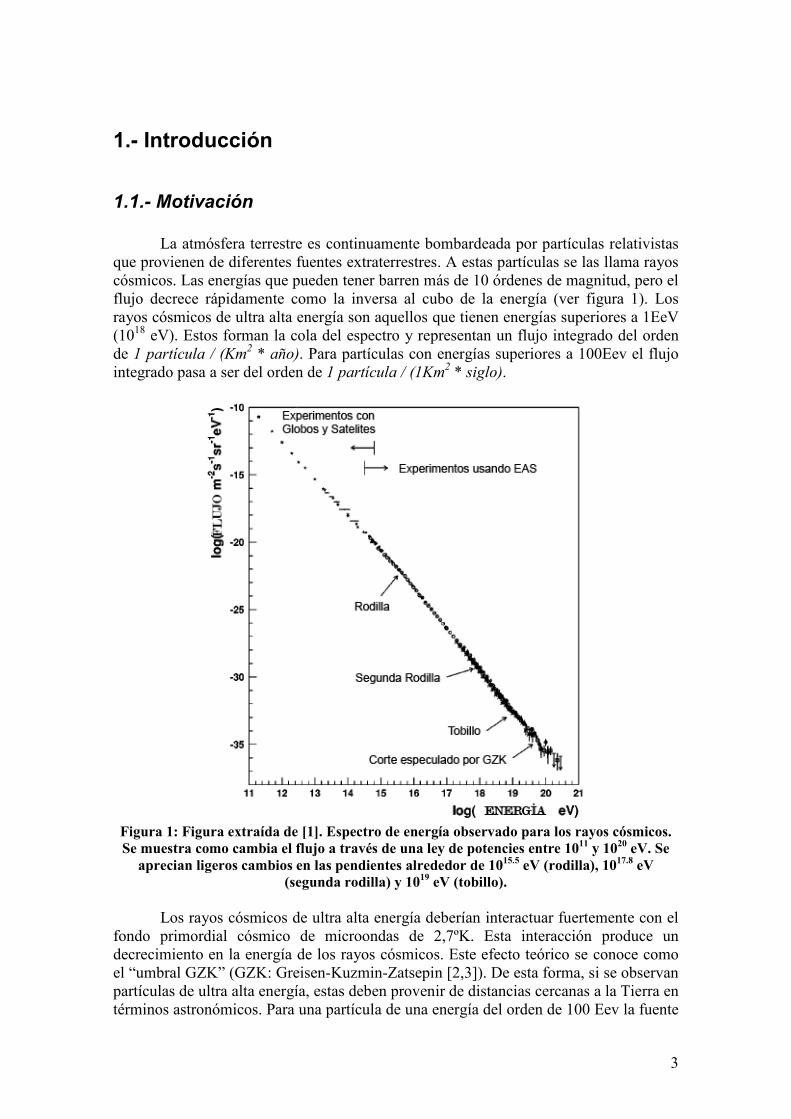
flujo decrece rápidamente como la inversa al cubo de la energía (ver figura 1). Los
rayos cósmicos de ultra alta energía son aquellos que tienen energías superiores a 1EeV
(1018 eV). Estos forman la cola del espectro y representan un flujo integrado del orden
de 1 partícula / (Km2 * año). Para partículas con energías superiores a 100Eev el flujo
integrado pasa a ser del orden de 1 partícula / (1Km2 * siglo).
Figura 1: Figura extraída de [1]. Espectro de energía observado para los rayos cósmicos.
Se muestra como cambia el flujo a través de una ley de potencies entre 1011 y 10
20 eV. Se
aprecian ligeros cambios en las pendientes alrededor de 1015.5
eV (rodilla), 1017.8
eV
(segunda rodilla) y 1019 eV (tobillo).
Los rayos cósmicos de ultra alta energía deberían interactuar fuertemente con el
fondo primordial cósmico de microondas de 2,7ºK. Esta interacción produce un
decrecimiento en la energía de los rayos cósmicos. Este efecto teórico se conoce como
el “umbral GZK” (GZK: Greisen-Kuzmin-Zatsepin [2,3]). De esta forma, si se observan
partículas de ultra alta energía, estas deben provenir de distancias cercanas a la Tierra en
términos astronómicos. Para una partícula de una energía del orden de 100 Eev la fuente

4
no puede estar a una distancia mayor que 50Mpc. Sin embargo, diferentes experimentos
a lo largo de las últimas décadas han medido rayos cósmicos con energías del orden de
100 Eev y no se han podido identificar fuentes de estas partículas altamente energéticas.
En la actualidad existen modelos teóricos capaces de describir mecanismos capaces de
acelerar estas partículas a tan altas energías. Se puede encontrar una recopilación de los
modelos teóricos que explican la existencia de rayos cósmicos de ultra alta energía en
las referencias [4, 5, 6, 7, 8, 9].
La pregunta sobre el origen y la naturaleza de estas partículas que poseen
energías superiores al limite GZK es una de los desafíos que se presentan hoy en la
física de las astro-partículas. Actualmente, se tiene muy poca información sobre ellas ya
que el flujo de llegada es muy bajo y resulta difícil adquirir datos para un análisis
detallado.
1.2.- Observatorio Pierre Auger y EAS
El Observatorio Pierre Auger es una colaboración internacional que apunta a
explorar el espectro de rayos cósmicos de ultra alta energía a través de las lluvias
extendidas (EAS) que se producen cuando una de estas partículas comienza a
interactuar con la atmósfera.
Cuando un núcleo de alta energía entra en la atmósfera terrestre interactúa
fuertemente con un núcleo de un átomo de aire. La interacción se produce de forma
aleatoria y la trayectoria que realiza sin interactuar se llama camino libre. Al producirse
la interacción, parte de la energía de la partícula primaria se pierde en la producción de
nuevas partículas, llamadas secundarias. Las partículas secundarias están constituidas
principalmente por mesones, bariones e hyperiones. El número de partículas secundarias
aumenta al aumentar la energía de la partícula primaria. Las partículas secundarias
pueden asimismo interactuar nuevamente con otro átomo de la atmósfera y así
sucesivamente, produciendo la denominada cascada o lluvia de partículas.
Durante el proceso de formación de la cascada se producen diferentes
interacciones. En el caso de que la partícula cósmica sea un núcleo la primera
interacción es hadrónica. Posteriormente se realizan otras interacciones que se presentan
a continuación y un esquema de como se suceden a lo largo de la lluvia.

5
Figura 2: Desarrollo esquemático de la cascada de partículas con las componentes
hadrónica, muónica y electromagnética. Partícula incidente: nucleón.
Algunas de las partículas producidas en las interacciones hadrónicas son piones
neutros ( 0π ) los cuales pueden decaer en dos fotones:
γγπ +→0 (1)
Estos fotones inician la denominada cascada electromagnética constituida por
fotones, electrones y positrones que forman la denominada componente
electromagnética de la lluvia. En cada interacción hadrónica, más de la tercera parte de
la energía se va a la componente electromagnética de la lluvia. Como los hadrones
vuelven a interactuar, la mayor parte de la energía inicial se va a esta componente de la
lluvia.
Debe tenerse en cuenta que las partículas más abundantes en la lluvia son los
electrones y los positrones, debido a que la componente electromagnética se multiplica
muy rápidamente. Por ende, la mayor parte de la energía de la lluvia se disipa por la
ionización que estas partículas producen en su interacción con los átomos de la
atmósfera.
Otras partículas generadas en el desarrollo de la cascada son los mesones
cargados. El decaimiento de los mismos da origen a los muones. Los modos de
decaimientos dominantes son los siguientes:
π µ ν± ±→ + (2)
6
0
K µ ν
π π
± ±
±
→ +
+↘ (3)
Estos muones forman la denominada componente muónica de la lluvia. En
primera aproximación el número de muones aumenta a medida que la lluvia se
desarrolla, llega a un máximo y luego se atenúa muy lentamente. Esto sucede debido a
que dichas partículas raramente interactúan.
El Observatorio Pierre Auger es el primero diseñado para funcionar como un
detector híbrido. Se combinan dos técnicas complementarias para la detección de las
lluvias utilizando por un lado un detector de fluorescencia (FD) y por otro lado un
arreglo de superficie (SD).
El primero observa la luz de fluorescencia producida durante la excitación de las
moléculas de N2 de la atmósfera por las partículas cargadas producidas en la cascada.
El segundo está constituido por 1600 detectores Cerenkov (tanques de agua pura de 1.2
m de altura y 3.6 m de diámetro) los cuales cubren un área de 3000 Km2 y miden las
partículas electromagnéticas y los muones que arriban al suelo. La detección de la
radiación Cerenkov que estas partículas producen se realizará a través de tres fototubos.
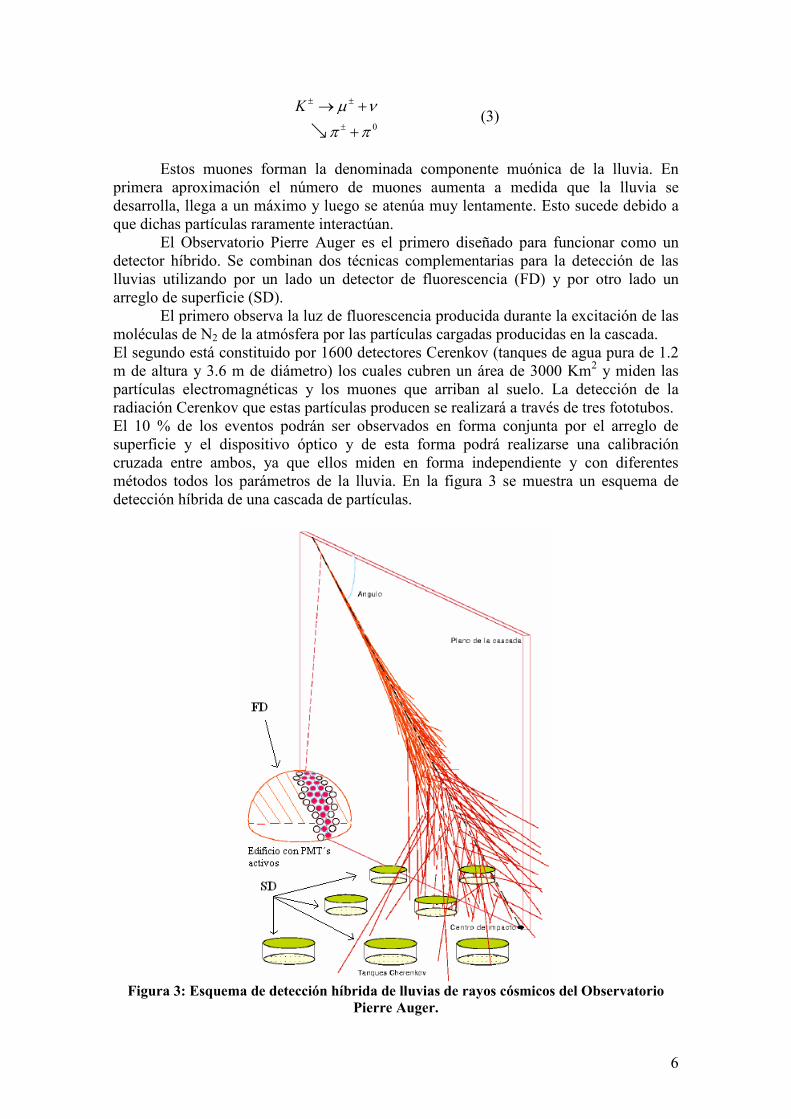
El 10 % de los eventos podrán ser observados en forma conjunta por el arreglo de
superficie y el dispositivo óptico y de esta forma podrá realizarse una calibración
cruzada entre ambos, ya que ellos miden en forma independiente y con diferentes
métodos todos los parámetros de la lluvia. En la figura 3 se muestra un esquema de
detección híbrida de una cascada de partículas.
Figura 3: Esquema de detección híbrida de lluvias de rayos cósmicos del Observatorio
Pierre Auger.
7
1.3.- Nuestra Tarea
Nuestra tarea dentro del Observatorio consistió principalmente en colaborar en
temas relacionadas con el FD. Se trabajó en el proceso de adquisición de datos, en la
construcción de las cámaras de uno de los detectores de fluorescencia y en el análisis y
modificación del código fuente del tercer nivel de trigger del detector; además se
colaboro en tareas de calibración y en el relevamiento de los tanques de SD. Las tareas
realizadas se detallan en las siguientes secciones del informe.
2.- Detector de Fluorescencia
2.1.- Introducción
La idea detrás del detector de fluorescencia (FD) es medir el perfil longitudinal
de las lluvias extendidas (EAS) a través de la atmósfera.
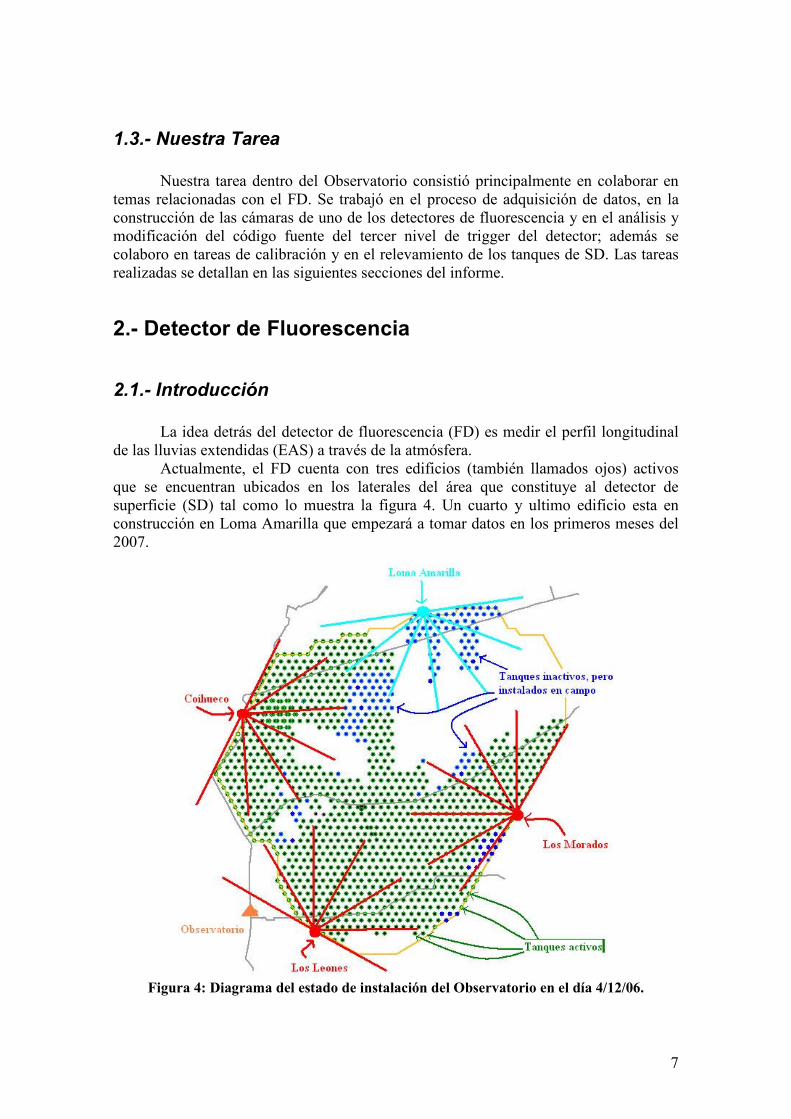
Actualmente, el FD cuenta con tres edificios (también llamados ojos) activos
que se encuentran ubicados en los laterales del área que constituye al detector de
superficie (SD) tal como lo muestra la figura 4. Un cuarto y ultimo edificio esta en
construcción en Loma Amarilla que empezará a tomar datos en los primeros meses del
2007.
Figura 4: Diagrama del estado de instalación del Observatorio en el día 4/12/06.
8
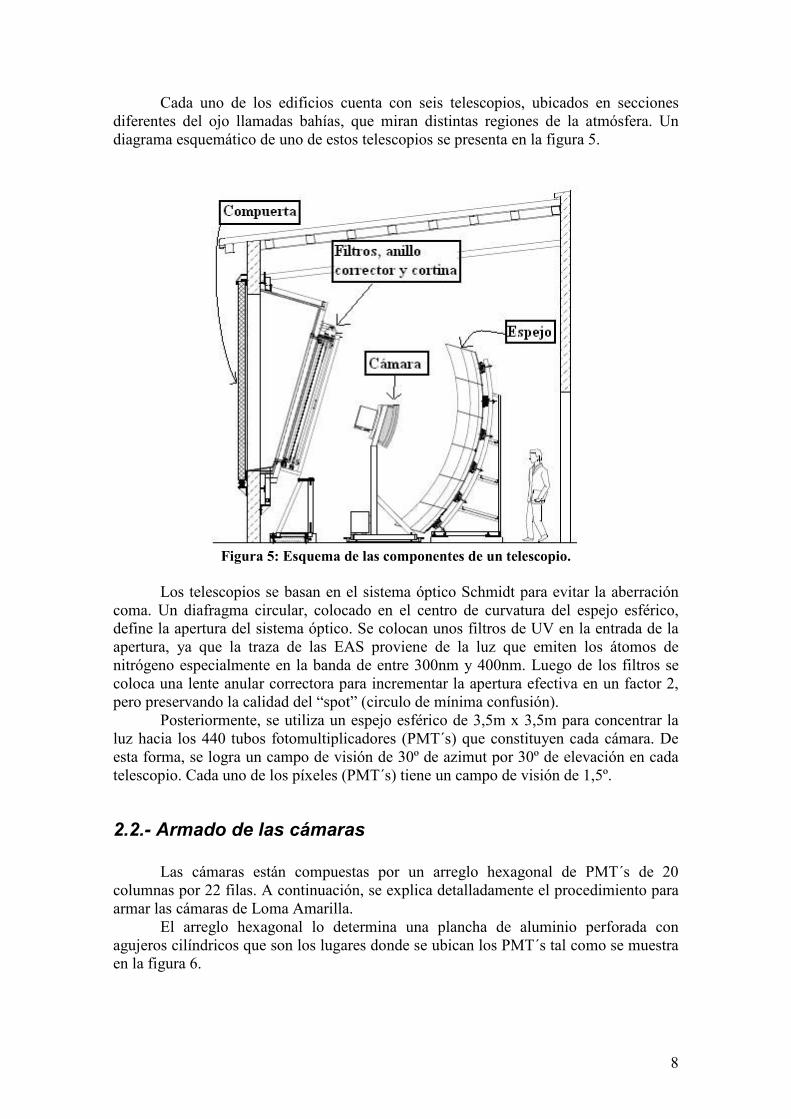
Cada uno de los edificios cuenta con seis telescopios, ubicados en secciones
diferentes del ojo llamadas bahías, que miran distintas regiones de la atmósfera. Un
diagrama esquemático de uno de estos telescopios se presenta en la figura 5.
Figura 5: Esquema de las componentes de un telescopio.
Los telescopios se basan en el sistema óptico Schmidt para evitar la aberración
coma. Un diafragma circular, colocado en el centro de curvatura del espejo esférico,
define la apertura del sistema óptico. Se colocan unos filtros de UV en la entrada de la
apertura, ya que la traza de las EAS proviene de la luz que emiten los átomos de
nitrógeno especialmente en la banda de entre 300nm y 400nm. Luego de los filtros se
coloca una lente anular correctora para incrementar la apertura efectiva en un factor 2,
pero preservando la calidad del “spot” (circulo de mínima confusión).
Posteriormente, se utiliza un espejo esférico de 3,5m x 3,5m para concentrar la
luz hacia los 440 tubos fotomultiplicadores (PMT´s) que constituyen cada cámara. De
esta forma, se logra un campo de visión de 30º de azimut por 30º de elevación en cada
telescopio. Cada uno de los píxeles (PMT´s) tiene un campo de visión de 1,5º.
2.2.- Armado de las cámaras
Las cámaras están compuestas por un arreglo hexagonal de PMT´s de 20
columnas por 22 filas. A continuación, se explica detalladamente el procedimiento para
armar las cámaras de Loma Amarilla.
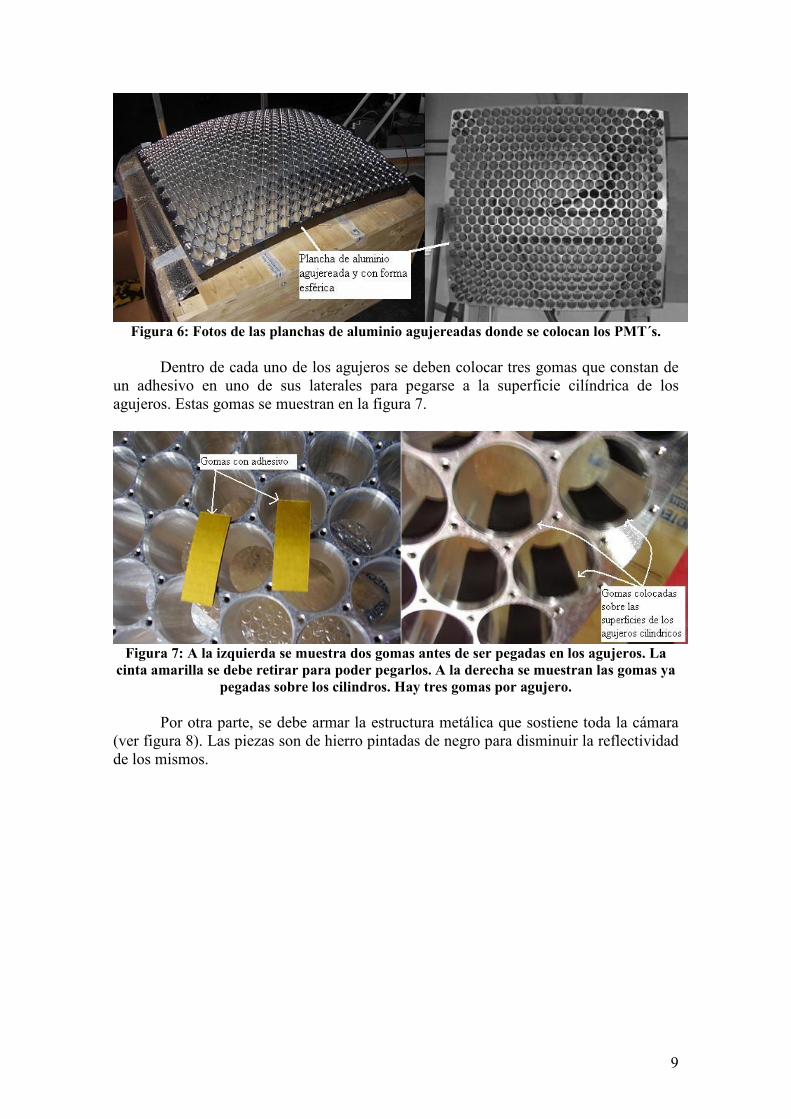
El arreglo hexagonal lo determina una plancha de aluminio perforada con
agujeros cilíndricos que son los lugares donde se ubican los PMT´s tal como se muestra
en la figura 6.
9
Figura 6: Fotos de las planchas de aluminio agujereadas donde se colocan los PMT´s.
Dentro de cada uno de los agujeros se deben colocar tres gomas que constan de
un adhesivo en uno de sus laterales para pegarse a la superficie cilíndrica de los
agujeros. Estas gomas se muestran en la figura 7.
Figura 7: A la izquierda se muestra dos gomas antes de ser pegadas en los agujeros. La
cinta amarilla se debe retirar para poder pegarlos. A la derecha se muestran las gomas ya
pegadas sobre los cilindros. Hay tres gomas por agujero.
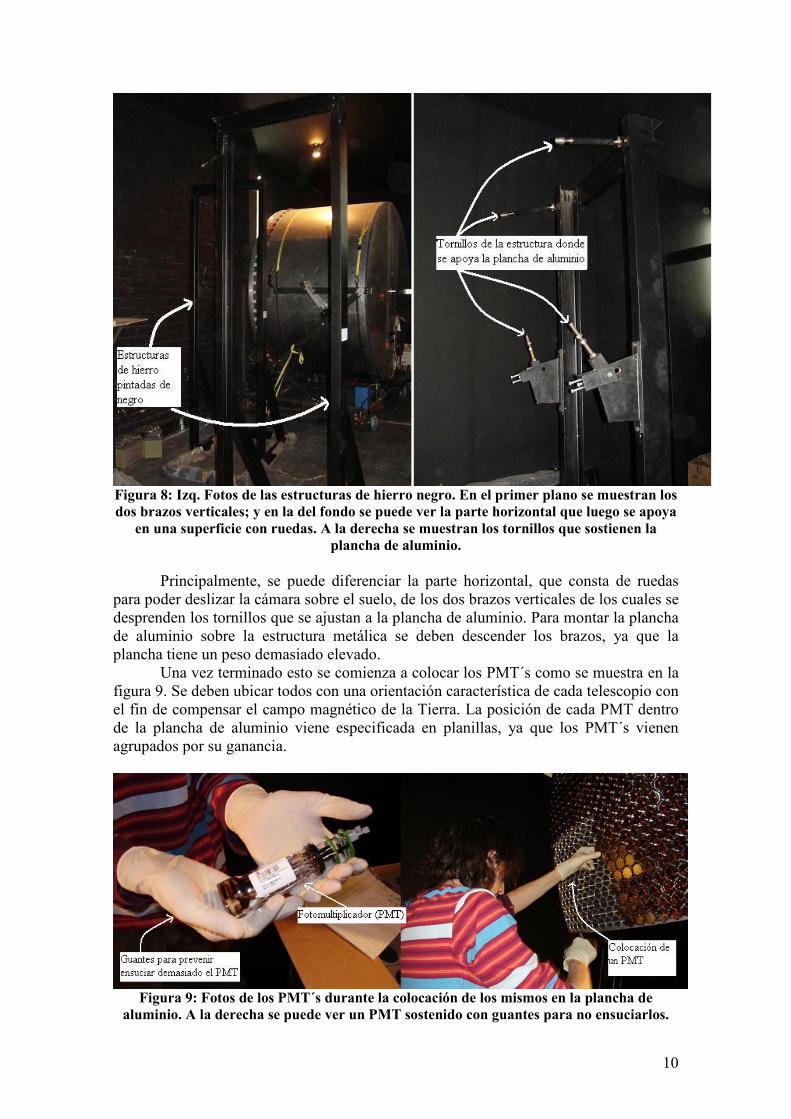
Por otra parte, se debe armar la estructura metálica que sostiene toda la cámara
(ver figura 8). Las piezas son de hierro pintadas de negro para disminuir la reflectividad
de los mismos.
10
Figura 8: Izq. Fotos de las estructuras de hierro negro. En el primer plano se muestran los
dos brazos verticales; y en la del fondo se puede ver la parte horizontal que luego se apoya
en una superficie con ruedas. A la derecha se muestran los tornillos que sostienen la
plancha de aluminio.
Principalmente, se puede diferenciar la parte horizontal, que consta de ruedas
para poder deslizar la cámara sobre el suelo, de los dos brazos verticales de los cuales se
desprenden los tornillos que se ajustan a la plancha de aluminio. Para montar la plancha
de aluminio sobre la estructura metálica se deben descender los brazos, ya que la
plancha tiene un peso demasiado elevado.
Una vez terminado esto se comienza a colocar los PMT´s como se muestra en la
figura 9. Se deben ubicar todos con una orientación característica de cada telescopio con
el fin de compensar el campo magnético de la Tierra. La posición de cada PMT dentro
de la plancha de aluminio viene especificada en planillas, ya que los PMT´s vienen
agrupados por su ganancia.
Figura 9: Fotos de los PMT´s durante la colocación de los mismos en la plancha de
aluminio. A la derecha se puede ver un PMT sostenido con guantes para no ensuciarlos.
11
Posteriormente, se comienza a armar los esqueletos. Estos son estructuras de
aluminio (ver figura 10) que se colocan detrás de la cámara para sostener los tableros
electrónicos que recogen la señal de los PMT´s. Previo al armado de los mismos es
importante limar los bordes, ya que éstos pueden cortar luego, cuando se estén
manipulando cables dentro de ellos.
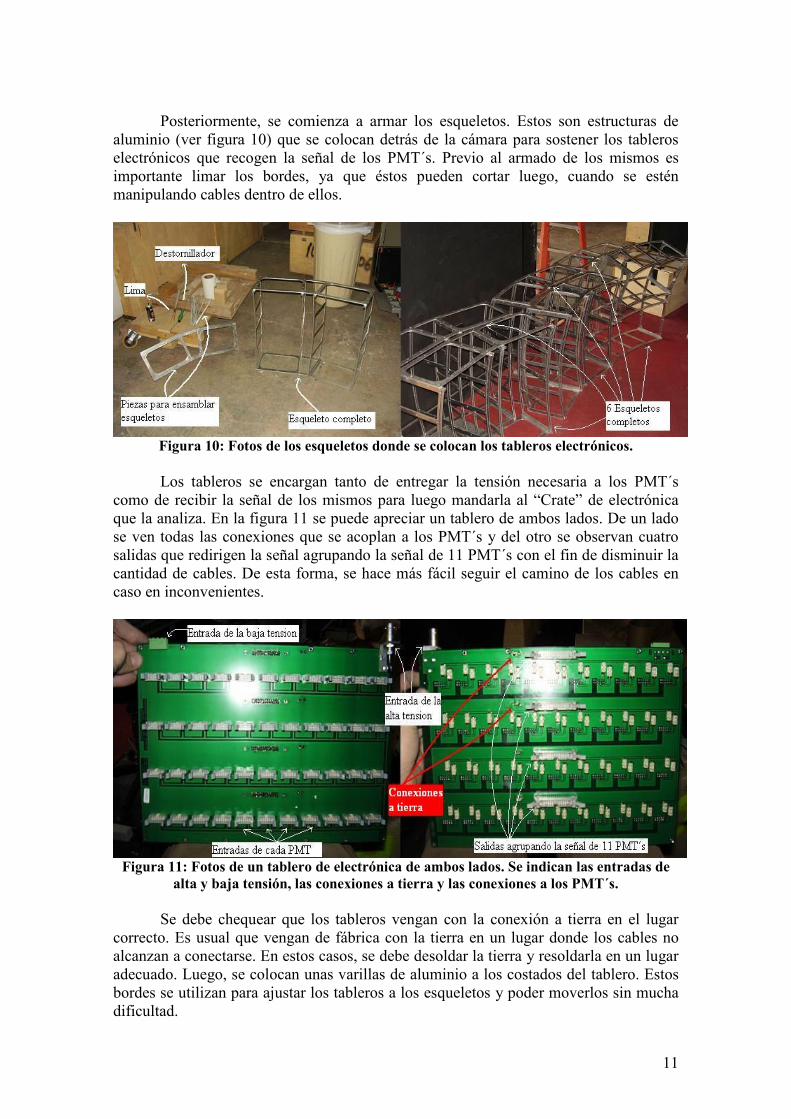
Figura 10: Fotos de los esqueletos donde se colocan los tableros electrónicos.
Los tableros se encargan tanto de entregar la tensión necesaria a los PMT´s
como de recibir la señal de los mismos para luego mandarla al “Crate” de electrónica
que la analiza. En la figura 11 se puede apreciar un tablero de ambos lados. De un lado
se ven todas las conexiones que se acoplan a los PMT´s y del otro se observan cuatro
salidas que redirigen la señal agrupando la señal de 11 PMT´s con el fin de disminuir la
cantidad de cables. De esta forma, se hace más fácil seguir el camino de los cables en
caso en inconvenientes.
Figura 11: Fotos de un tablero de electrónica de ambos lados. Se indican las entradas de
alta y baja tensión, las conexiones a tierra y las conexiones a los PMT´s.
Se debe chequear que los tableros vengan con la conexión a tierra en el lugar
correcto. Es usual que vengan de fábrica con la tierra en un lugar donde los cables no
alcanzan a conectarse. En estos casos, se debe desoldar la tierra y resoldarla en un lugar
adecuado. Luego, se colocan unas varillas de aluminio a los costados del tablero. Estos
bordes se utilizan para ajustar los tableros a los esqueletos y poder moverlos sin mucha
dificultad.

12
Cuando se comienza a colocar los tableros en el esqueleto se debe asimismo
conectar cada PMT a un enchufe específico de un dado tablero. Estos procesos se deben
realizar en simultaneo, ya que si se coloca primero los tableros y después los cables la
densidad de cables es tan alta que la tarea se vuelve insostenible.
Finalmente, en la figura 12 se puede ver la cámara completa desde atrás. Se
destacan los cables rojos que van a las conexiones de baja tensión.
Figura 12: Fotos de las cámaras vistas de atrás. A la izquierda se puede apreciar la
cámara completa y la densidad de cables que hace difícil la manipulación de los mismos. A
la derecha se pone énfasis en las conexiones de la baja tensión.
Los cables a las conexiones de alta tensión se colocan una vez que las cámaras
ya están en el sitio y correctamente alineadas. La tensión alta es indispensable para la
ganancia de cada PMT y la baja tensión es necesaria en este caso por la electrónica que
tienen los PMT´s [10]. Por ultimo, se envuelven las cámaras para poder transportarlas
sin que sufran ningún daño.
2.3.- Calibración absoluta de los telescopios de fluorescencia: “Drum Calibration”.
2.3.1.- Introducción
El objetivo principal de la calibración de los telescopios de fluorescencia a
través del “drum” es poder convertir las cuentas de ADC que recoge cada canal de los
fotomultiplicadores del FD en flujo de luz incidente. De esta manera se pueden realizar
las reconstrucciones de los perfiles de las lluvias y obtener su energía total.
En principio la respuesta cuantitativa de cada PMT de las cámaras se podría
obtener de mediciones independientes de todos los constituyentes del telescopio. Sin
embargo, el equipo de calibración utiliza un método que se deshace de todos los
componentes intermedios del telescopio y utiliza una fuente de luz previamente
estudiada que ilumina la apertura del telescopio. Con los valores recogidos por el ADC
ante el estimulo de esta fuente se realiza la calibración absoluta de los telescopios
acumulando de esta manera todos los efectos intermedios.

13
Para esto se utiliza el ya denominado “drum” (ver figura 13). El mismo consiste
en una fuente de luz portátil con forma de tambor de 2,5m de diámetro. La fuente
provee un flujo de fotones pulsado de intensidad conocida, que es uniforme a lo largo
de su apertura y que “triggerea” simultáneamente todos los píxeles de la cámara.
Figura 13: El “Drum” montado sobre un carro bajo que permite su
desplazamiento (izq.). El “Drum” frente a un telescopio luego de la calibración
(der.).
Asimismo se realiza una calibración absoluta del “drum”. Para esto se utiliza un
fotodetector de silicio diseñado para trabajar en el UV y calibrado en NIST. Dado que
estos detectores poseen una superficie de detección pequeña y una baja respuesta se
utiliza un fotomultiplicador como paso intermedio en la calibración.
2.3.2.- Fuentes de luz y el “drum”.
El “drum” es una gran caja hueca recubierta en su interior con tybec, un material
difusivamente reflectivo en el UV. A lo largo del mismo y en el centro, hay un tubo en
el que se colocan las diferentes fuentes de luz intercambiables que se utilizan. El frente
del drum es una hoja delgada de teflón a través de la cual se emite la luz.
El rango espectral a utilizar tanto en la calibración de los telescopios con el
“drum” como en la calibración misma del “drum” es de entre 300 y 400nm. En este
rango se encuentran las líneas de emisión del nitrógeno. Por lo tanto se utilizan leds de
distinto tipo y fuentes de Xenón.
14
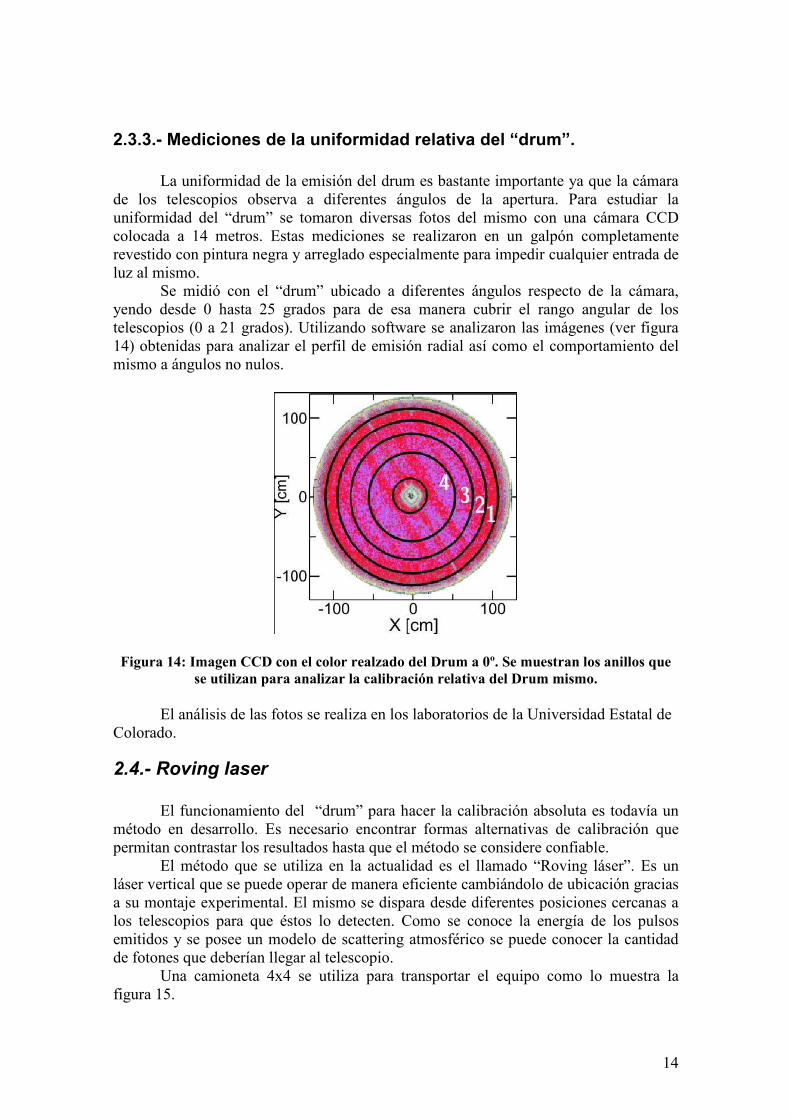
2.3.3.- Mediciones de la uniformidad relativa del “drum”.
La uniformidad de la emisión del drum es bastante importante ya que la cámara
de los telescopios observa a diferentes ángulos de la apertura. Para estudiar la
uniformidad del “drum” se tomaron diversas fotos del mismo con una cámara CCD
colocada a 14 metros. Estas mediciones se realizaron en un galpón completamente
revestido con pintura negra y arreglado especialmente para impedir cualquier entrada de
luz al mismo.
Se midió con el “drum” ubicado a diferentes ángulos respecto de la cámara,
yendo desde 0 hasta 25 grados para de esa manera cubrir el rango angular de los
telescopios (0 a 21 grados). Utilizando software se analizaron las imágenes (ver figura
14) obtenidas para analizar el perfil de emisión radial así como el comportamiento del
mismo a ángulos no nulos.
Figura 14: Imagen CCD con el color realzado del Drum a 0º. Se muestran los anillos que
se utilizan para analizar la calibración relativa del Drum mismo.
El análisis de las fotos se realiza en los laboratorios de la Universidad Estatal de
Colorado.
2.4.- Roving laser
El funcionamiento del “drum” para hacer la calibración absoluta es todavía un
método en desarrollo. Es necesario encontrar formas alternativas de calibración que
permitan contrastar los resultados hasta que el método se considere confiable.
El método que se utiliza en la actualidad es el llamado “Roving láser”. Es un
láser vertical que se puede operar de manera eficiente cambiándolo de ubicación gracias
a su montaje experimental. El mismo se dispara desde diferentes posiciones cercanas a
los telescopios para que éstos lo detecten. Como se conoce la energía de los pulsos
emitidos y se posee un modelo de scattering atmosférico se puede conocer la cantidad
de fotones que deberían llegar al telescopio.
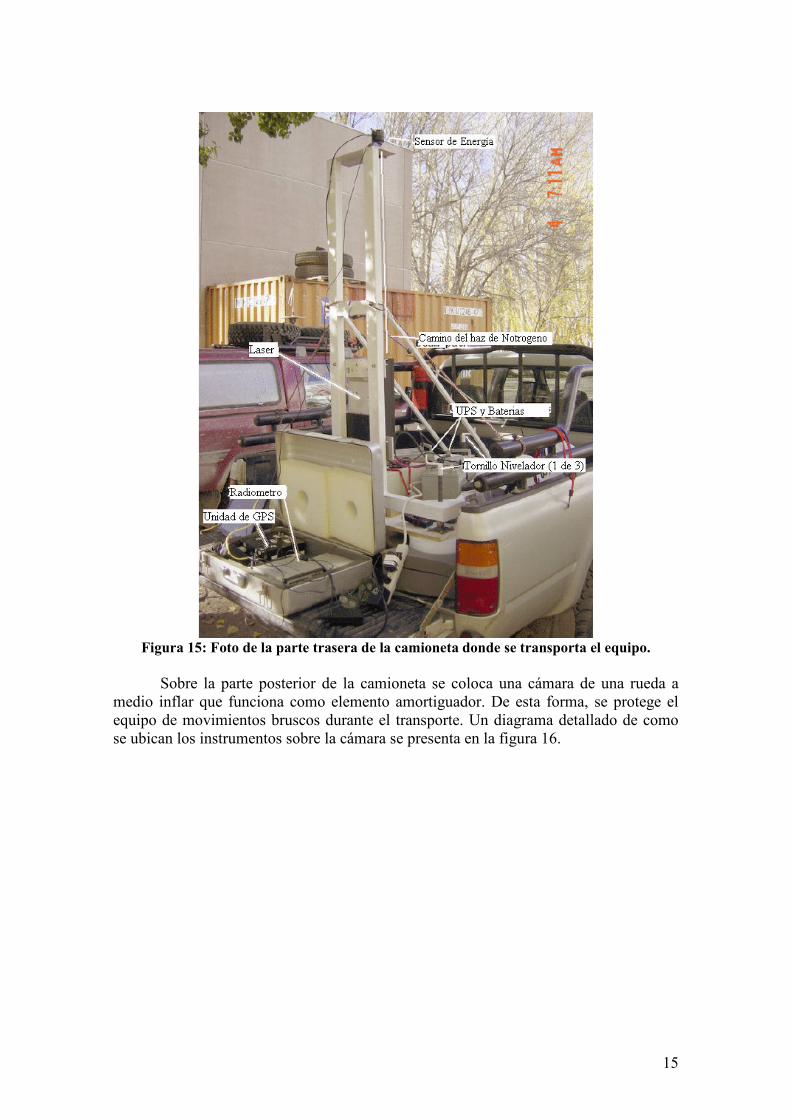
Una camioneta 4x4 se utiliza para transportar el equipo como lo muestra la
figura 15.
15
Figura 15: Foto de la parte trasera de la camioneta donde se transporta el equipo.
Sobre la parte posterior de la camioneta se coloca una cámara de una rueda a
medio inflar que funciona como elemento amortiguador. De esta forma, se protege el
equipo de movimientos bruscos durante el transporte. Un diagrama detallado de como
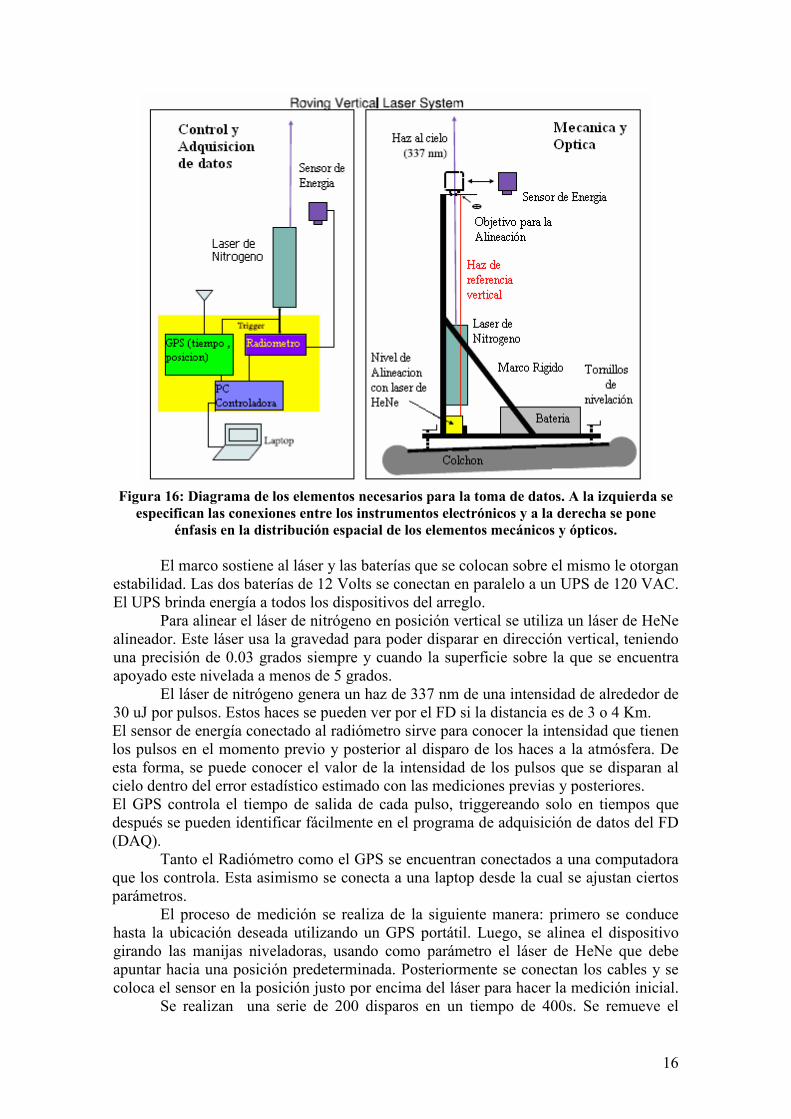
se ubican los instrumentos sobre la cámara se presenta en la figura 16.
16
Figura 16: Diagrama de los elementos necesarios para la toma de datos. A la izquierda se
especifican las conexiones entre los instrumentos electrónicos y a la derecha se pone
énfasis en la distribución espacial de los elementos mecánicos y ópticos.
El marco sostiene al láser y las baterías que se colocan sobre el mismo le otorgan
estabilidad. Las dos baterías de 12 Volts se conectan en paralelo a un UPS de 120 VAC.
El UPS brinda energía a todos los dispositivos del arreglo.
Para alinear el láser de nitrógeno en posición vertical se utiliza un láser de HeNe
alineador. Este láser usa la gravedad para poder disparar en dirección vertical, teniendo
una precisión de 0.03 grados siempre y cuando la superficie sobre la que se encuentra
apoyado este nivelada a menos de 5 grados.
El láser de nitrógeno genera un haz de 337 nm de una intensidad de alrededor de
30 uJ por pulsos. Estos haces se pueden ver por el FD si la distancia es de 3 o 4 Km.
El sensor de energía conectado al radiómetro sirve para conocer la intensidad que tienen
los pulsos en el momento previo y posterior al disparo de los haces a la atmósfera. De
esta forma, se puede conocer el valor de la intensidad de los pulsos que se disparan al
cielo dentro del error estadístico estimado con las mediciones previas y posteriores.
El GPS controla el tiempo de salida de cada pulso, triggereando solo en tiempos que
después se pueden identificar fácilmente en el programa de adquisición de datos del FD
(DAQ).
Tanto el Radiómetro como el GPS se encuentran conectados a una computadora
que los controla. Esta asimismo se conecta a una laptop desde la cual se ajustan ciertos
parámetros.
El proceso de medición se realiza de la siguiente manera: primero se conduce
hasta la ubicación deseada utilizando un GPS portátil. Luego, se alinea el dispositivo
girando las manijas niveladoras, usando como parámetro el láser de HeNe que debe
apuntar hacia una posición predeterminada. Posteriormente se conectan los cables y se
coloca el sensor en la posición justo por encima del láser para hacer la medición inicial.
Se realizan una serie de 200 disparos en un tiempo de 400s. Se remueve el
17
sensor y se dispara nuevamente una serie al cielo. Al finalizar se realiza otra serie
utilizando el sensor. Este procedimiento se puede realizar cuantas veces sea necesario
para cada ubicación. Típicamente, se mide dos veces donde la segunda medición es una
precaución ante la posibilidad que los primeros datos se corrompan.
2.5.- Trabajo en el Shift de FD
Para asegurar que la adquisición de datos con el FD sea buena es necesario
seguir procedimientos bien determinados tanto para el mismo proceso de adquisición
como para el registro de los problemas que puedan surgir.
El periodo de adquisición de datos esta determinado por las noches que tienen
menos del 60% de la Luna llena. De esta forma el ruido de fondo no es excesivo.
El proceso de adquisición lo realiza un grupo de físicos y estudiantes. Cada día
el procedimiento comienza tres horas antes del crepúsculo astronómico (el Sol se
encuentra 18º por debajo del horizonte).
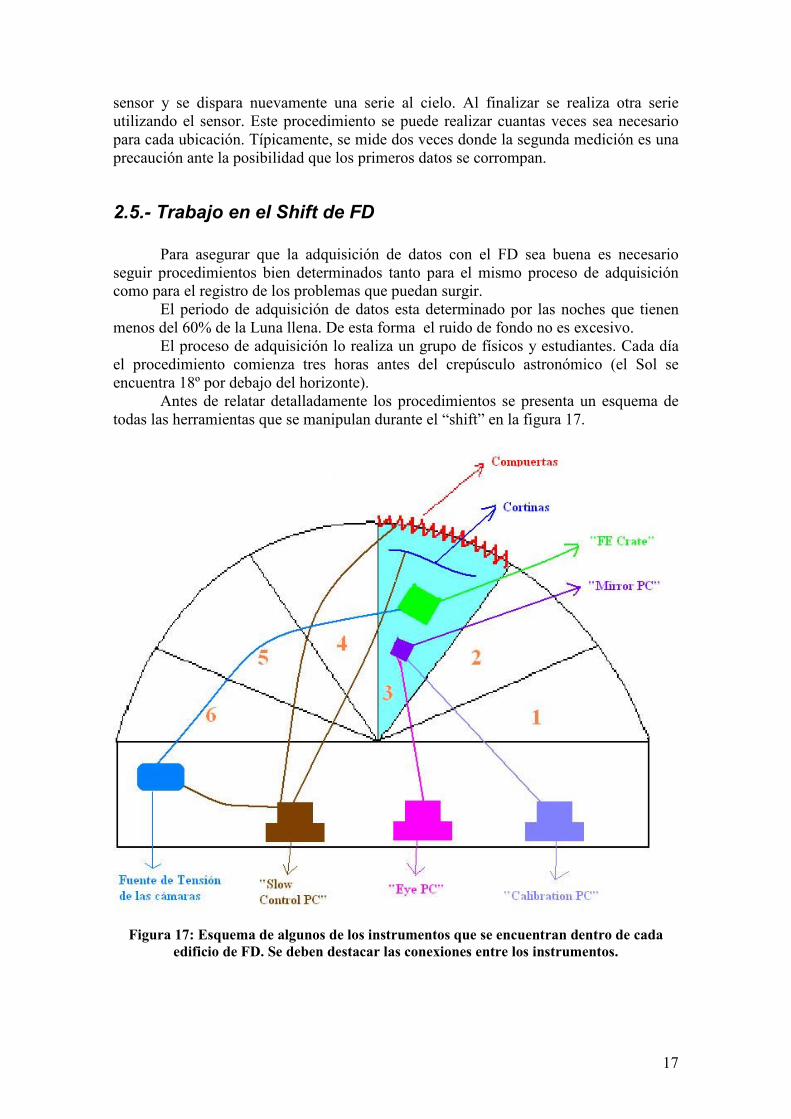
Antes de relatar detalladamente los procedimientos se presenta un esquema de
todas las herramientas que se manipulan durante el “shift” en la figura 17.
Figura 17: Esquema de algunos de los instrumentos que se encuentran dentro de cada
edificio de FD. Se deben destacar las conexiones entre los instrumentos.
18
El primer día del “shift” todos los telescopios de los tres edificios actualmente
funcionando deben estar en modo “sleep”. Esto implica que compuertas y cortinas estén
cerradas y todos los instrumentos electrónicos dentro de las bahías estén apagados.
El primer paso es pasar de modo “sleep” a modo “stand by” desde la
computadora “Show Control”. Este paso genera que las cortinas se abran y que se
enciendan todos los elementos de las bahías con excepción de la baja y alta tensión de
las cámaras. Durante el periodo de shift no se vuelve al modo “sleep” a menos que un
problema mayor lo requiera.
Al principio de cada día se debe comenzar por conectarse al “EyePC”. Esta es
una computadora que lleva a cabo procesos tales como la toma de datos y el registro de
los mismos. También desde ella se accede a las “MirrorPC” que son las computadoras
que funcionan dentro de cada bahía. Cuando uno se encuentra conectado al “EyePC” se
ejecuta un programa llamado “check_proc.csh”, que verifica que todos los procesos
necesarios estén corriendo en cada “MirrorPC”. En caso de que el “EyePC” se haya
reiniciado por alguna razón imprevista, se deben reiniciar todos los “MirrorPC” del
edificio, ya que, en caso contrario, no estarán corriendo los procesos indispensables.
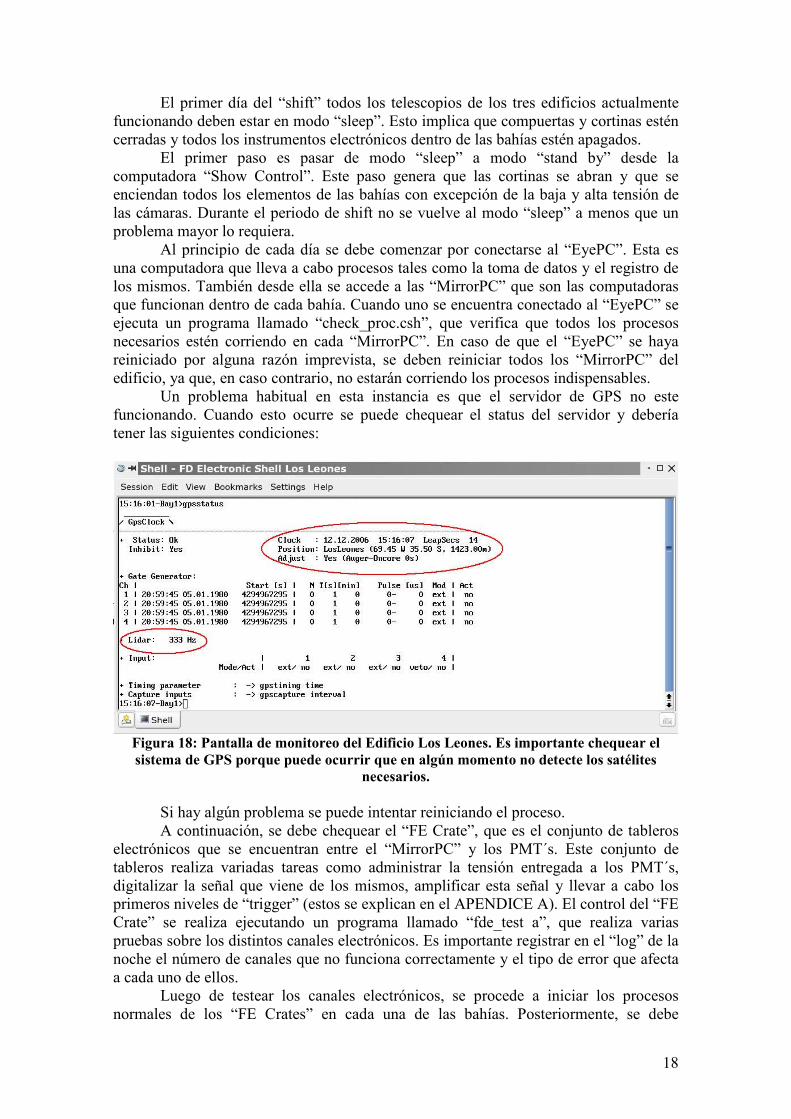
Un problema habitual en esta instancia es que el servidor de GPS no este
funcionando. Cuando esto ocurre se puede chequear el status del servidor y debería
tener las siguientes condiciones:
Figura 18: Pantalla de monitoreo del Edificio Los Leones. Es importante chequear el
sistema de GPS porque puede ocurrir que en algún momento no detecte los satélites
necesarios.
Si hay algún problema se puede intentar reiniciando el proceso.
A continuación, se debe chequear el “FE Crate”, que es el conjunto de tableros
electrónicos que se encuentran entre el “MirrorPC” y los PMT´s. Este conjunto de
tableros realiza variadas tareas como administrar la tensión entregada a los PMT´s,
digitalizar la señal que viene de los mismos, amplificar esta señal y llevar a cabo los
primeros niveles de “trigger” (estos se explican en el APENDICE A). El control del “FE
Crate” se realiza ejecutando un programa llamado “fde_test a”, que realiza varias
pruebas sobre los distintos canales electrónicos. Es importante registrar en el “log” de la
noche el número de canales que no funciona correctamente y el tipo de error que afecta
a cada uno de ellos.
Luego de testear los canales electrónicos, se procede a iniciar los procesos
normales de los “FE Crates” en cada una de las bahías. Posteriormente, se debe
19
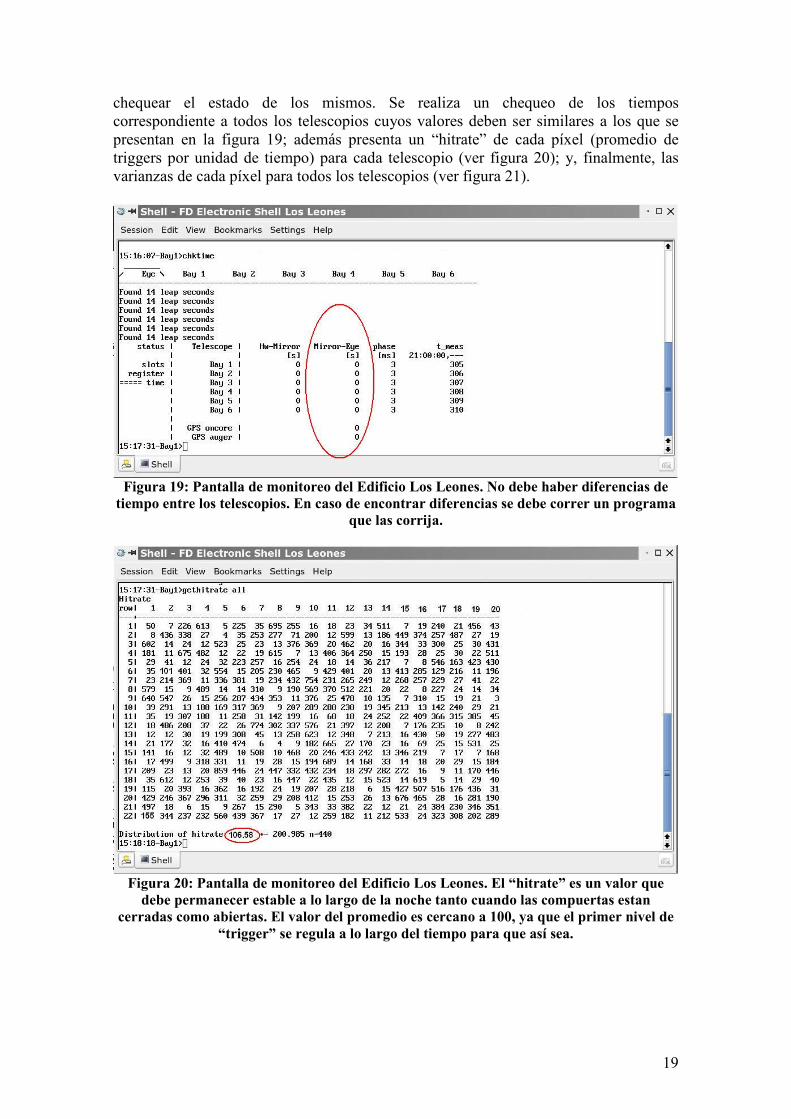
chequear el estado de los mismos. Se realiza un chequeo de los tiempos
correspondiente a todos los telescopios cuyos valores deben ser similares a los que se
presentan en la figura 19; además presenta un “hitrate” de cada píxel (promedio de
triggers por unidad de tiempo) para cada telescopio (ver figura 20); y, finalmente, las
varianzas de cada píxel para todos los telescopios (ver figura 21).
Figura 19: Pantalla de monitoreo del Edificio Los Leones. No debe haber diferencias de
tiempo entre los telescopios. En caso de encontrar diferencias se debe correr un programa
que las corrija.
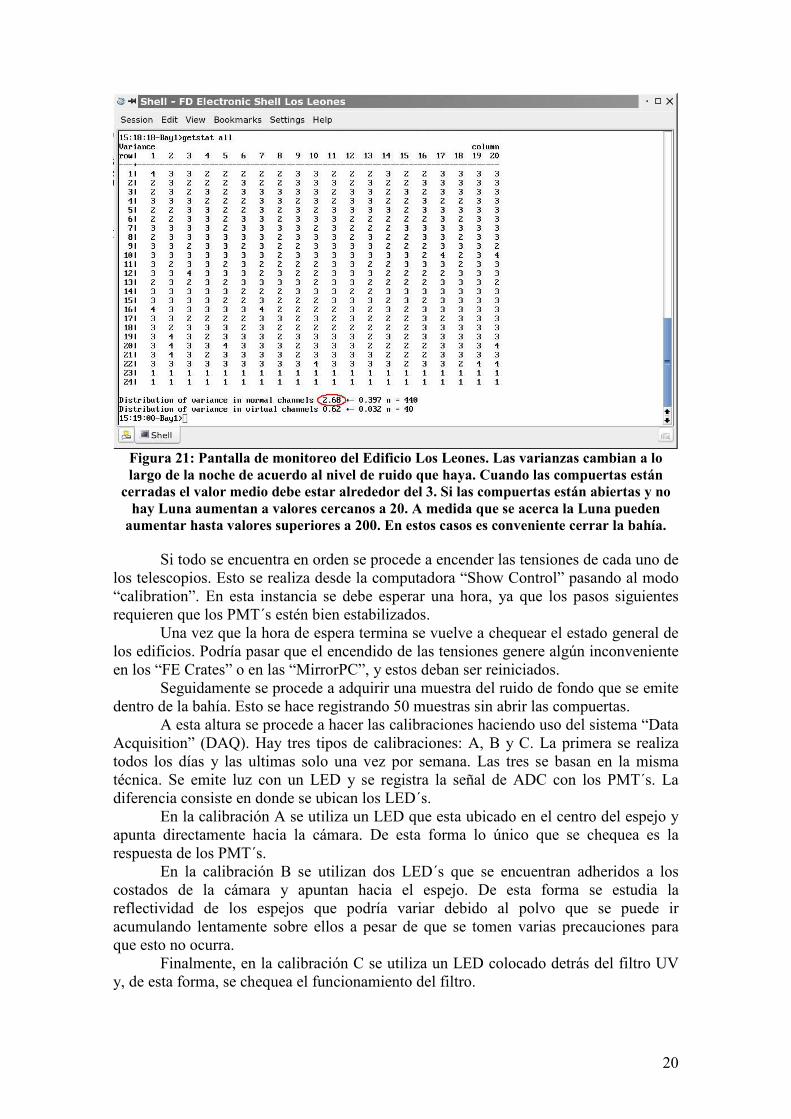
Figura 20: Pantalla de monitoreo del Edificio Los Leones. El “hitrate” es un valor que
debe permanecer estable a lo largo de la noche tanto cuando las compuertas estan
cerradas como abiertas. El valor del promedio es cercano a 100, ya que el primer nivel de
“trigger” se regula a lo largo del tiempo para que así sea.
20
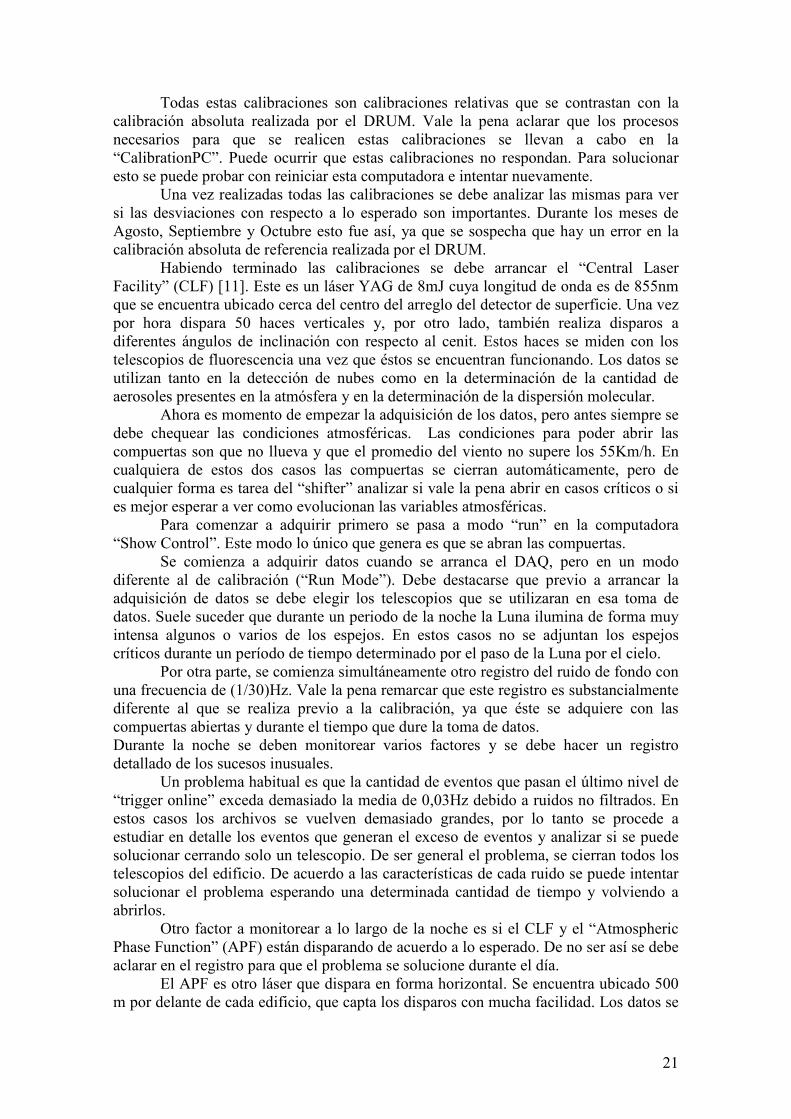
Figura 21: Pantalla de monitoreo del Edificio Los Leones. Las varianzas cambian a lo
largo de la noche de acuerdo al nivel de ruido que haya. Cuando las compuertas están
cerradas el valor medio debe estar alrededor del 3. Si las compuertas están abiertas y no
hay Luna aumentan a valores cercanos a 20. A medida que se acerca la Luna pueden
aumentar hasta valores superiores a 200. En estos casos es conveniente cerrar la bahía.
Si todo se encuentra en orden se procede a encender las tensiones de cada uno de
los telescopios. Esto se realiza desde la computadora “Show Control” pasando al modo
“calibration”. En esta instancia se debe esperar una hora, ya que los pasos siguientes
requieren que los PMT´s estén bien estabilizados.
Una vez que la hora de espera termina se vuelve a chequear el estado general de
los edificios. Podría pasar que el encendido de las tensiones genere algún inconveniente
en los “FE Crates” o en las “MirrorPC”, y estos deban ser reiniciados.
Seguidamente se procede a adquirir una muestra del ruido de fondo que se emite
dentro de la bahía. Esto se hace registrando 50 muestras sin abrir las compuertas.
A esta altura se procede a hacer las calibraciones haciendo uso del sistema “Data
Acquisition” (DAQ). Hay tres tipos de calibraciones: A, B y C. La primera se realiza
todos los días y las ultimas solo una vez por semana. Las tres se basan en la misma
técnica. Se emite luz con un LED y se registra la señal de ADC con los PMT´s. La
diferencia consiste en donde se ubican los LED´s.
En la calibración A se utiliza un LED que esta ubicado en el centro del espejo y
apunta directamente hacia la cámara. De esta forma lo único que se chequea es la
respuesta de los PMT´s.
En la calibración B se utilizan dos LED´s que se encuentran adheridos a los
costados de la cámara y apuntan hacia el espejo. De esta forma se estudia la
reflectividad de los espejos que podría variar debido al polvo que se puede ir
acumulando lentamente sobre ellos a pesar de que se tomen varias precauciones para
que esto no ocurra.
Finalmente, en la calibración C se utiliza un LED colocado detrás del filtro UV
y, de esta forma, se chequea el funcionamiento del filtro.
21
Todas estas calibraciones son calibraciones relativas que se contrastan con la
calibración absoluta realizada por el DRUM. Vale la pena aclarar que los procesos
necesarios para que se realicen estas calibraciones se llevan a cabo en la
“CalibrationPC”. Puede ocurrir que estas calibraciones no respondan. Para solucionar
esto se puede probar con reiniciar esta computadora e intentar nuevamente.
Una vez realizadas todas las calibraciones se debe analizar las mismas para ver
si las desviaciones con respecto a lo esperado son importantes. Durante los meses de
Agosto, Septiembre y Octubre esto fue así, ya que se sospecha que hay un error en la
calibración absoluta de referencia realizada por el DRUM.
Habiendo terminado las calibraciones se debe arrancar el “Central Laser
Facility” (CLF) [11]. Este es un láser YAG de 8mJ cuya longitud de onda es de 855nm
que se encuentra ubicado cerca del centro del arreglo del detector de superficie. Una vez
por hora dispara 50 haces verticales y, por otro lado, también realiza disparos a
diferentes ángulos de inclinación con respecto al cenit. Estos haces se miden con los
telescopios de fluorescencia una vez que éstos se encuentran funcionando. Los datos se
utilizan tanto en la detección de nubes como en la determinación de la cantidad de
aerosoles presentes en la atmósfera y en la determinación de la dispersión molecular.
Ahora es momento de empezar la adquisición de los datos, pero antes siempre se
debe chequear las condiciones atmosféricas. Las condiciones para poder abrir las
compuertas son que no llueva y que el promedio del viento no supere los 55Km/h. En
cualquiera de estos dos casos las compuertas se cierran automáticamente, pero de
cualquier forma es tarea del “shifter” analizar si vale la pena abrir en casos críticos o si
es mejor esperar a ver como evolucionan las variables atmosféricas.
Para comenzar a adquirir primero se pasa a modo “run” en la computadora
“Show Control”. Este modo lo único que genera es que se abran las compuertas.
Se comienza a adquirir datos cuando se arranca el DAQ, pero en un modo
diferente al de calibración (“Run Mode”). Debe destacarse que previo a arrancar la
adquisición de datos se debe elegir los telescopios que se utilizaran en esa toma de
datos. Suele suceder que durante un periodo de la noche la Luna ilumina de forma muy
intensa algunos o varios de los espejos. En estos casos no se adjuntan los espejos
críticos durante un período de tiempo determinado por el paso de la Luna por el cielo.
Por otra parte, se comienza simultáneamente otro registro del ruido de fondo con
una frecuencia de (1/30)Hz. Vale la pena remarcar que este registro es substancialmente
diferente al que se realiza previo a la calibración, ya que éste se adquiere con las
compuertas abiertas y durante el tiempo que dure la toma de datos.
Durante la noche se deben monitorear varios factores y se debe hacer un registro
detallado de los sucesos inusuales.
Un problema habitual es que la cantidad de eventos que pasan el último nivel de
“trigger online” exceda demasiado la media de 0,03Hz debido a ruidos no filtrados. En
estos casos los archivos se vuelven demasiado grandes, por lo tanto se procede a
estudiar en detalle los eventos que generan el exceso de eventos y analizar si se puede
solucionar cerrando solo un telescopio. De ser general el problema, se cierran todos los
telescopios del edificio. De acuerdo a las características de cada ruido se puede intentar
solucionar el problema esperando una determinada cantidad de tiempo y volviendo a
abrirlos.
Otro factor a monitorear a lo largo de la noche es si el CLF y el “Atmospheric
Phase Function” (APF) están disparando de acuerdo a lo esperado. De no ser así se debe
aclarar en el registro para que el problema se solucione durante el día.
El APF es otro láser que dispara en forma horizontal. Se encuentra ubicado 500
m por delante de cada edificio, que capta los disparos con mucha facilidad. Los datos se

22
utilizan para contrastarlos con los datos del CLF. Este láser al estar muy cerca del
edificio no se ve tan afectado por la presencia de aerosoles. Un problema usual es que la
computadora que se encarga de dar la orden de disparo al CLF del algún edificio no
funcione correctamente. En estos casos, el problema se resuelve fácilmente, yendo al
sitio y reiniciando la computadora
Las varianzas de cada telescopio es otro factor que se debe monitorear a lo largo
de la noche. Estas tienden a subir cuando la cantidad de ruido de fondo es importante.
De esta forma, las varianzas son una excelente herramienta para monitorear la presencia
de la Luna. En caso de que las varianzas sean altas en uno o varios telescopios, se cierra
la adquisición de datos, luego se cierra la compuerta y, se reabre la adquisición de datos
sin involucrar a los telescopios con altas varianzas.
La adquisición de datos finaliza en el amanecer astronómico (18º antes de que
aparezca el Sol en el horizonte). En este momento se cierran todos los procesos de
adquisición y luego se cierran todas las compuertas. Consecuentemente, todas las bahías
quedan en modo “calibration”. Se vuelve a tomar una muestra del ruido de fondo
análogamente a como se hizo al principio de la noche. Luego, se realizan nuevamente
las calibraciones que se hicieron al principio de la noche y se las analizan de manera
análoga. Mientras que se toman los datos para las calibraciones se puede proceder a
cerrar el CLF.
En esta instancia se puede pasar al modo “stand by” y el detector queda en
condiciones para ser utilizado la noche siguiente. En este momento se termina de
completar el “log” con los detalles de última hora y, luego se lo carga a la Web en caso
de que los expertos quieran saber el estado de los datos y los problemas de la noche.
3.- Modificación al T3
Durante los tres meses de trabajo en el observatorio Pierre Auger, en los
periodos en los que no estábamos trabajando en los “Shifts” de toma de datos ni en la
construcción de las cámaras, nos dedicamos a estudiar el código fuente del tercer nivel
de “Trigger” del detector de fluorescencia. De este estudio surgieron muchas ideas para
modificar el código para mejorarlo. Descartando las más ambiciosas y aquellas que no
mejoraban sensiblemente el filtrado de eventos, llegamos a una modificación sencilla
que resultó bastante efectiva para filtrar los eventos indeseados que producen los
relámpagos y algunos eventos de ruido de la electrónica. El resultado de este trabajo fue
presentado en la reunión semestral de la colaboración Pierre Auger que tuvo lugar en
Noviembre de 2006. En la reunión y luego del análisis por parte de los especialistas, se
determino implementar la modificación propuesta con una variación. Además este
trabajo esta documentado en un GAP-Note (Nota de la colaboración) que esta en
proceso de revisión para su posterior archivo entre las notas privadas de la colaboración.
Una versión traducida al español de este GAP-Note, cuyos autores son los que escriben
este trabajo, se encuentra en el ANEXO A.

23
4.- Lidar
4.1.- Introducción
Como vimos en la sección 1, los rayos cósmicos producen lluvias extensas de
partículas y los telescopios de FD miden la fluorescencia producida por las mismas.
Para la reconstrucción posterior de este perfil longitudinal observado por los telescopios
de fluorescencia es de esencial importancia tener un conocimiento importante del
comportamiento global y local de la atmósfera en escalas generales de tiempo y en el
momento en que se producen los eventos interesantes [12]. Las mediciones de la energía
que realizan los detectores de fluorescencia (FD) dependerán fuertemente de la
precisión que se tiene para medir ciertas características de la atmósfera y correcciones a
los modelos idealizados como ser:
• Transmisión atmosférica.
• Perdida por emisión Cerenkov.
• Dispersión múltiple de la luz.
• Correcciones por la presencia de nubes.
• Correcciones por la presencia de niveles anormales de aerosoles.
Para el estudio de la atmósfera en el lugar del experimento se llevó a cabo la
construcción de una red de cuatro estaciones LIDAR. Una en cada uno de los sitios
donde se encuentran los telescopios de fluorescencia.
El sistema montado en cada estación consiste fundamentalmente en dos
subsistemas acoplados: un subsistema de emisión y otro de recepción. Ambos sistemas
están montados en un marco mecánico que permite el movimiento alrededor de dos ejes.
El sistema de emisión es un láser pulsado que emite luz UV de 357nm en pulsos de
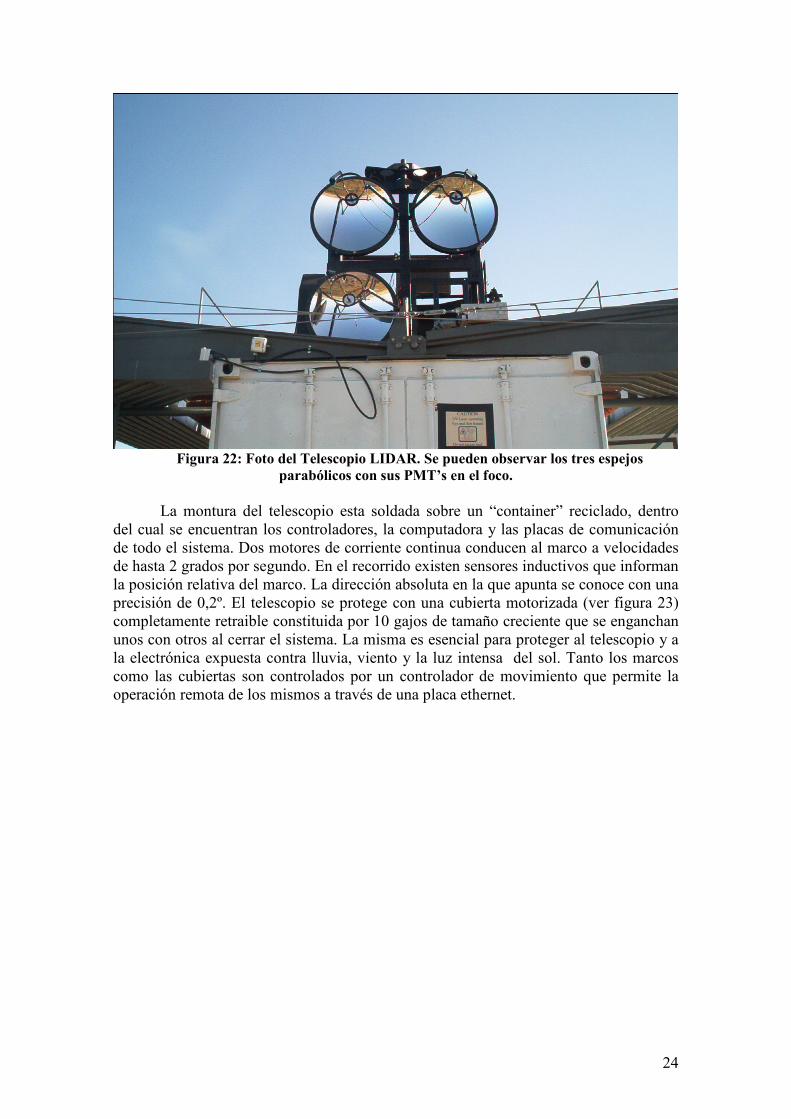
20ns con 0.1mJ. El sistema de recepción consiste en tres (o dos) espejos parabólicos de
0,5m2 que, alineados con la dirección del láser, reciben y concentran la luz del láser
retrodispersada en la atmósfera en un PMT (ver figura 22).
24
Figura 22: Foto del Telescopio LIDAR. Se pueden observar los tres espejos
parabólicos con sus PMT’s en el foco.
La montura del telescopio esta soldada sobre un “container” reciclado, dentro
del cual se encuentran los controladores, la computadora y las placas de comunicación
de todo el sistema. Dos motores de corriente continua conducen al marco a velocidades
de hasta 2 grados por segundo. En el recorrido existen sensores inductivos que informan
la posición relativa del marco. La dirección absoluta en la que apunta se conoce con una
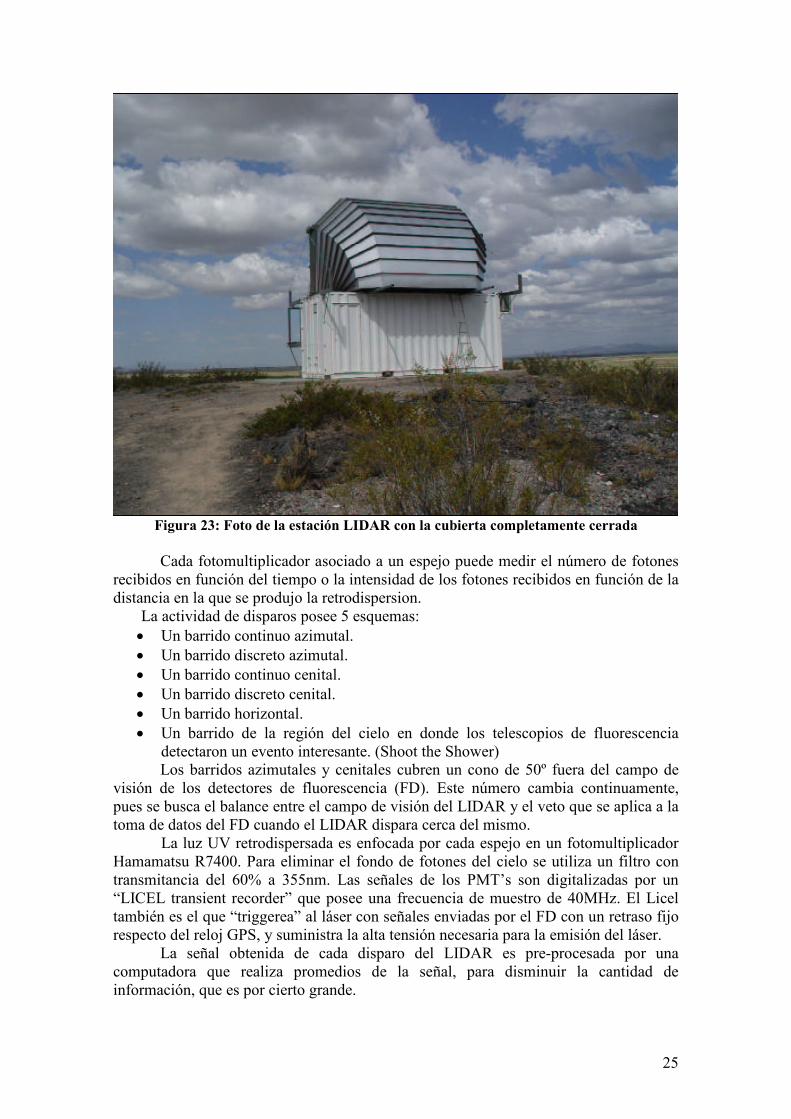
precisión de 0,2º. El telescopio se protege con una cubierta motorizada (ver figura 23)
completamente retraible constituida por 10 gajos de tamaño creciente que se enganchan
unos con otros al cerrar el sistema. La misma es esencial para proteger al telescopio y a
la electrónica expuesta contra lluvia, viento y la luz intensa del sol. Tanto los marcos
como las cubiertas son controlados por un controlador de movimiento que permite la
operación remota de los mismos a través de una placa ethernet.
25
Figura 23: Foto de la estación LIDAR con la cubierta completamente cerrada
Cada fotomultiplicador asociado a un espejo puede medir el número de fotones
recibidos en función del tiempo o la intensidad de los fotones recibidos en función de la
distancia en la que se produjo la retrodispersion.
La actividad de disparos posee 5 esquemas:
• Un barrido continuo azimutal.
• Un barrido discreto azimutal.
• Un barrido continuo cenital.
• Un barrido discreto cenital.
• Un barrido horizontal.
• Un barrido de la región del cielo en donde los telescopios de fluorescencia
detectaron un evento interesante. (Shoot the Shower)
Los barridos azimutales y cenitales cubren un cono de 50º fuera del campo de
visión de los detectores de fluorescencia (FD). Este número cambia continuamente,
pues se busca el balance entre el campo de visión del LIDAR y el veto que se aplica a la
toma de datos del FD cuando el LIDAR dispara cerca del mismo.
La luz UV retrodispersada es enfocada por cada espejo en un fotomultiplicador
Hamamatsu R7400. Para eliminar el fondo de fotones del cielo se utiliza un filtro con
transmitancia del 60% a 355nm. Las señales de los PMT’s son digitalizadas por un
“LICEL transient recorder” que posee una frecuencia de muestro de 40MHz. El Licel
también es el que “triggerea” al láser con señales enviadas por el FD con un retraso fijo
respecto del reloj GPS, y suministra la alta tensión necesaria para la emisión del láser.
La señal obtenida de cada disparo del LIDAR es pre-procesada por una
computadora que realiza promedios de la señal, para disminuir la cantidad de
información, que es por cierto grande.

26
Figura 24: Diagrama del funcionamiento de la adquisición de datos del LIDAR
Al lado de la montura del telescopio se encuentra una luz y una cámara
maniobrable que permiten observar el movimiento del telescopio y la cubierta. La
alimentación de todos los sistemas esta controlada por una placa RPC que posee una
conexión ethernet para ser controlada remotamente. La misma administra la
alimentación del Láser, los motores de movimiento del telescopio y la cubierta, la
computadora, el licel, la luz y la cámara.
Toda la información pre-procesada en el sitio del LIDAR es luego enviada al
centro de adquisición de datos (CDAS) donde es humanamente monitoreada, y donde
además se monitorea y ejecuta el correcto funcionamiento del sistema. Todo este
arreglo experimental permite controlar el instrumento sin necesidad de estar en el lugar
durante la toma de datos. Simplemente conectándose por la red a la computadora del
lugar y a la placa RPC que controla la alimentación se puede operar el LIDAR.
Por otra parte en la estación LIDAR de LL se encuentra instalado un LIDAR
Raman. Un LIDAR Raman, es un LIDAR de mayor potencia de láser, que mediante la
descomposición de la luz observada analiza tanto el scattering elástico (LIDAR común),
como el inelástico que se produce entre el láser y los modos rotacionales de las
moléculas (LIDAR Raman). El LIDAR Raman instalado en LL utiliza uno de los tres
espejos. Este espejo, en lugar de concentrar la luz sobre un PMT, tiene anexado una
Terminal de fibra óptica en su foco. Esta lleva la luz a una caja que contiene un sistema
óptico que descompone la luz para poder analizar las líneas del nitrógeno, oxigeno y
vapor de agua con tres PMT's diferentes.
4.2.- Operación del LIDAR
4.2.1.- Pasos previos: Actualmente se encuentran instalados y en funcionamiento tres de los cuatro
LIDAR: Los Leones (LL), Los Morados (LM) y Coihueco (CO). Los tres son iguales
excepto por tres diferencias en LL. Para el movimiento de la cubierta LL posee solo un
motor (hecho que se modifico en los otros LIDAR por razones que veremos mas
adelante). Por otra parte, LL es el único que posee un LIDAR Raman para el análisis de
la composición atmosférica. Por ultimo, el LIDAR de LL posee solo dos espejos para la
operación normal en vez de los tres que poseen LM y CO. Las computadoras
(LidarPC’s) y RPC’s de los tres LIDAR se operan desde una única computadora que se
encuentra en el CDAS.
27
La toma de datos efectiva se realiza entre el crepúsculo y el amanecer náuticos
(entre 7 y 12 hs aproximadamente según la época del año). Estas tomas de datos se
repiten durante 19 días aproximadamente que es el tiempo de toma de datos del FD. Se
debe comenzar con el trabajo por lo menos 1 hora antes del crepúsculo náutico para
preparar el Láser. Antes que nada hay que verificar las condiciones climáticas. El Lidar
no puede operar con lluvia. Por otra parte la toma de datos no se realiza con vientos de
más de 50km/h. Las cubiertas de los LIDAR no se deben abrir ni cerrar con vientos de
mas de 35km/h (30 km/h en LL dado que tiene un motor menos) puesto que sus formas
son propensas a embolsar el viento lo que podría dañarlas. Además hay que verificar la
temperatura, ya que si hace frío (<5º) el láser tardara mas tiempo en calentarse a la
temperatura optima de su funcionamiento.
Para disparar el láser, cada estación LIDAR recibe un pulso para su triggereo de
333Hz proveniente del FD. Sin embargo, el modulo GPS del FD que provee el pulso se
resetea muchas veces bajando la frecuencia a 20Hz. Por esto, entrando en una terminal
de la electrónica del FD se debe verificar y modificar la frecuencia para que esta sea la
correcta.
4.2.2.- Puesta a punto: Cada Lidar se opera utilizando una sesión VNC dentro de la computadora del
CDAS. Una sesión VNC es una interfaz grafica que permite operar remotamente la
computadora. Una vez abierta la sesión VNC se corre el programa “Servers Reset”. El
mismo resetea las comunicaciones entre las LidarPCs y los artefactos periféricos de la
estación Lidar (cámara, motores, láser, etc.) así también como las herramientas de
monitoreo (graficador del clima, graficador de los datos de escaneo), y prepara los
archivos de registro.
Dentro de la misma sesión VNC se abre el “Power Control” que es un programa
que opera la RPC. Desde allí se comienza a encender el Láser. El programa esperará
que la cabeza del láser y el diodo estén a las temperaturas de funcionamiento. Mientras
se espera se puede ir abriendo la cubierta luego de encender el motor que la controla.
Para hacer esto se encienden previamente la cámara y la luz para poder observar la
correcta apertura. La cámara se puede movilizar para poder observar en la dirección
deseada.
Una vez abierta la cubierta se procede a resetear el telescopio. Al comenzar esto
el telescopio esta estacionado y flexionado en la posición mas baja. El reseteo del
telescopio mueve sus dos ejes de manera predeterminada, hasta una posición en la que
encuentra unos detectores que le informan la posición. Este procedimiento es
indispensable, ya que el telescopio a partir de ahí realizará su movimiento tomando
como referencia la posición de reseteo.
Cuando el láser se termina de encender, se deben verificar que las temperaturas
estén en los rangos adecuados. Una vez verificado esto se procede a darle corriente al
láser. Ya preparado el Láser y con el telescopio en la posición correcta se pueden apagar
la luz y la cámara. Luego de esto se enciende el LICEL que controlará la alta tensión, la
digitalización de la señal y el triggereo del sistema.
Todo lo previamente explicado se debe repetir para cada estación LIDAR.
Durante todo el proceso de apertura de los telescopios, la posterior toma de
datos, y luego el cierre del mismo, se deberá registrar todos los acontecimientos,
horarios y problemas en un registro digital que luego es levantado a la Web. Los
especialistas consultan este registro para poder monitorear el estado general del sistema
y la calidad de los datos obtenidos.

28
Una vez preparadas todas las cuestiones de hardware en los sitios de los LIDAR,
se procede a iniciar todo el software relacionado con los servidores de comunicación,
tanto localmente (en el CDAS) como en los sitios. En primer lugar se corren los
programas locales que son los siguientes:
• “Lidar Beholder”: Es un servidor que procesa los mensajes provenientes de las
LidarPCs. El mismo informa el estado de los periféricos que se conectan a las
LidarPCs.
• “T3 Listener”: Es un programa que analiza los eventos provenientes del detector
de superficie (SD) y del FD para decidir si se produjeron eventos híbridos
(SD+FD) o stereos (FD con dos o mas ojos) lo suficientemente interesantes.
• “SD Monitor”: Es un programa que busca los eventos de FD que pudieron haber
sido observados por SD.
• “ILoview”: Es un programa con una interfaz grafica que lee la información que
llega de los Lidares para representar en un grafico los distintos disparos que se
producen en cada sitio.
4.2.3.- Toma de datos: Luego de abrir los programas que corren en los servidores locales, se abren los
programas que corren en las LidarPCs que son los que se encargan de la toma de datos:
• “ldaq”: Servidor de adquisición de datos.
• “lrcgui”: Programa que prepara y hace funcionar el telescopio, tanto en su
movimiento mecánico como en los disparos del láser.
• “olv”: Una ventana visual que permite monitorear la señal digitalizada
observada por los PMT’s en función de la señal emitida.
• “WindRain”: Programa que monitorea la lluvia y velocidad del viento. Este
programa además, posee una función que automáticamente cierra el Lidar en
caso de lluvia.
A esta altura, las cubiertas de los telescopios están abiertas, los telescopios están
en posición, los láseres y los digitalizadores están prendidos, todos los programas de los
servidores locales (CDAS) y de las LidarPCs están corriendo. Entonces se comienza
con la adquisición habilitando el modo de escaneo de los lidares. A partir de aquí los
lidares comenzaran con los escaneos azimutales, cenitales y horizontales y cambiaran al
modo “shoot the shower” cuando aparezca un evento hibrido o estereo lo
suficientemente interesante.
En principio eso es todo lo que hay que hacer para la apertura y puesta en
funcionamiento de los telescopios. Sin embargo todo el software y el hardware del
sistema esta en continua revisión y mejora ya que siempre surgen problemas e
imprevistos. De hecho no hubo un solo día durante nuestra operación, que no hubiera
problemas. Como ejemplo podríamos enumerar: tener que resetear los servidores
sistemáticamente puesto que se colgaban, bloqueos mecánicos de los telescopios, mal
funcionamiento de los GPS's, imposibilidad de cerrar el lidar por un corte de luz, etc.
Durante el tiempo de adquisición de datos, el trabajo consiste en monitorear
todos los programas que permiten identificar los distintos problemas que van surgiendo,
reportar los mismos e intentar solucionarlos.
Una vez terminada la adquisición de datos, hay que apagar los láseres, estacionar
el telescopio y cerrar la cubierta. Luego se apagan el resto de los periféricos, se cierran
el resto de los programas de comunicación y se completa el registro.
29
4.2.4.- Raman La operación del Raman esta casi completamente automatizada. Una vez
prendido el láser del LIDAR, se ajustan con un programa los valores de corriente a
utilizar y se realiza la toma de datos del Raman. Se debe procurar no operar el Raman
junto con el FD, ya que el Raman es extremadamente potente (7 mJ) y produciría
triggereos con una tasa excesiva para el detector de fluorescencia. Se hace una corrida
de 40 minutos de duración antes del comienzo de la adquisición de datos por el FD, y
una corrida de 20 minutos al finalizar la adquisición.
5.- Detector de Superficie
5.1.- Introducción
El detector de superficie (SD) consiste de un arreglo hexagonal de 1600 tanques
distribuidos en una superficie de alrededor de 3000Km2. Actualmente, se encuentran
instalados alrededor de 1000 tanques.
La ventaja de este detector es que su funcionamiento no depende de que sea de
noche, de condiciones atmosféricas o de la Luna. Esto quiere decir que debería
funcionar todo el tiempo de no ser por las fallas técnicas que se pueden presentar. Según
las estimaciones, el tiempo de funcionamiento del FD representa solo un 10 por ciento
del tiempo de SD. Consecuentemente, el SD aporta mucha mas estadística.
El FD al ser capaz de medir el perfil longitudinal de una lluvia es mejor para
poder obtener la energía de la partícula primaria. Esta energía se utilizara para poder
calibrar los datos de SD.
5.2.- Tareas Realizadas
En nuestra experiencia no se participó en el armado de los tanques o en la
instalación de los mismos en el campo. Sin embargo, durante dos días se colaboro en el
mantenimiento de los tanques. Los problemas que pueden presentarse son varios:
• Falla de un PMT
• Falla de un equipo de electrónica
• Falla de las antenas de transmisión
• Falla del equipo de energía solar
• Erosión de suelos
El último de los problemas comenzó a representar un problema en los últimos
meses. Luego de un relevamiento de los tanques se detecto que los vientos que circulan
por la Pampa corroen ciertos terrenos de forma tal que varios tanques comienzan a
inclinarse de manera peligrosa (ver figura 25). Los equipos de electrónica se pueden
soltar y, en casos extremos, pueden llegar a volcarse.

30
Figura 25: Tanque inclinado por culpa de la erosión producida por el viento al suelo.
Para solucionar este problema se rodea los tanques con canto rodado para
proteger el terreno de los vientos.
El procedimiento consiste en ir a una cantera y cargar piedras sobre los camiones
(ver figura 26). Estos transportan las piedras a los tanques. El orden de prioridad de los
tanques se establece de acuerdo al estado de los tanques y a las características del
terreno según el relevamiento previamente mencionado.
Figura 26: Fotos de la pala mecánica cargando el canto rodado sobre los camiones en la
cantera.
Una camioneta va delante de los camiones y haciendo uso de un GPS va
determinando la ruta más adecuada para que circulen los camiones. Los caminos están
muchas veces en mal estado y es frecuente encontrarse con problemas en terrenos
complicados. En particular, los camiones pueden enterrarse en salinas (ver figura 27) y
desenterrarlos puede llevar varias horas.

31
Figura 27: Fotos de los camiones enterrados en una salina. El terreno es seco por encima,
pero húmedo debajo de la primera capa de tierra. Se hizo necesario usar la pala mecánica
para poder desenterrar a los camiones.
Finalmente, cuando se llega a destino se suelta una cantidad de canto rodado y se
lo distribuye alrededor del tanque utilizando palas.
6.- Conclusiones
El proyecto Pierre Auger (PPO) se podría decir que esta en una etapa “infantil”
de su vida útil. Todavía esta en construcción aunque ya lleva tomados una gran cantidad
de datos.
A pesar de estos datos, dado que el objetivo del experimento es realizar una
amplia y prolongada estadística del fenómeno de rayos cósmicos, tomará varios años
mas para poder cumplir ese objetivo, e incluso para poder comprender como llegar
satisfactoriamente al mismo.
Incluso podemos decir que no solo está en construcción la parte inicialmente
diseñada del experimento sino que al día de hoy se siguen diseñando mejoras tanto de
software como de infraestructura para ampliar las capacidades y la calidad del
experimento.
En lo que respecta a nuestro trabajo, durante tres meses realizamos un conjunto
amplio de tareas en el PPO. Desde la simpleza de utilizar la pala para tapar los agujeros
debajo de los tanques producidos por el viento, hasta analizar y modificar complejos
códigos de software, todas las actividades realizadas son parte de un proceso amplio e
intenso de aprendizaje de las tareas de un físico experimental. En todos los casos la
comunicación con las personas, el trabajo en equipo, la creatividad, la iniciativa, la
capacidad de liderazgo, el criterio formado y el aprendizaje mismo de los criterios que
permiten tomar decisiones son habilidades y capacidades esencialmente necesarias para
el trabajo en un proyecto de tamaña envergadura como es el PPO.
Para resumir, se enumera las actividades que desarrollamos y las colaboraciones
que realizamos:
• Realización de un “Shift” de toma de datos del FD.
• Realización de un “Shift” de toma de datos del LIDAR.
• Armado de las 6 cámaras del ojo de Fluorescencia de Loma Amarilla a ser
instaladas en Diciembre de 2006/Enero de 2007.
32
• Análisis y modificación del código del tercer nivel de “trigger” (T3) del detector
de fluorescencia.
• Presentación de la modificación del T3 en el “meeting” semestral de la
colaboración internacional del PPO.
• Colaboración con el equipo de calibración absoluta de Fluorescencia. (“Drum”
Team y “Roving” Team)
• Colaboración en la instalación de componentes del LIDAR de Loma Amarilla.
• Colaboración en tareas de campo del detector de Superficie.
7.- Referencias
[1] M. Pagano y A. A. Watson, Rev. Mod. Phy., 72, 3, (2000)
[2] A. Penzias y R. Wilson, Ap. J., 142, 419 (1965).
[3] K. Greisen, Phys. Rep. Lett., 16, 748 (1966).
[4] S. Yoshida y H. Dai, J. Phys. G., 24, 905 (1998).
[5] P. Bhattacharjee y G. Sigl, Phys. Rept., 327, 109 (2000).
[6] T. Stanev y H. P. Vankov, Phys. Rev. D., 55, 1365 (1997).
[7] C. A. Norman, D. B. Melrose y A. Achterberg, Asptrophys. J., 454, 60 (1995).
[8] G. Sigl, D. N. Schramm y P. Bhattacharjee, Astrop. Phys., 2, 401 (1994).
[9] P. Sokolsky, P. Sommers y B. R. Dawson, Phys. Rept., 217, 225 (1992).
[10] S. Argirò, D. V. Camin, M. Destro y C. K. Guérard, NIM A, 435 (1999).
[11] “The central laser facility at the P.A.O.”, JINST 1 P11003 (2006)
[12] “The LIDAR systems for atmospheric monitoring in Auger”, NIM A, 518 (2004)
8.- Agradecimientos
En primer lugar, queremos reconocer especialmente a Julio Rodríguez Martino,
nuestro director de Laboratorio 6 y 7 en el PPO. No solo se encargo de nuestras
actividades academico laborales dentro del proyecto sino que puso especial énfasis en
involucrarnos en la vida social de Malargue.
En segundo lugar, agradecemos a Marcos Santander, quien se ocupó de guiarnos
en el trabajo con el codigo del T3. Su paciencia a la hora de responder preguntas de
bash y C++ es algo evidiable.
En tercer lugar, queremos agradecer a Jorge Rodríguez por prestarnos la
computadora e involucrarnos en las tareas de LIDAR
En general, damos gracias a todos los grupos que nos permitieron trabajar con
ellos.
1. Grupo LIDAR: R. Mussa
2. Grupo “Drum”: P. Bauleo, J. Brack, J. Harton, R. Knapik, A.C. Rovero y
A.Pichel
3. Grupo Mantenimiento de Superficie: R. Perez, M. Rodríguez y J. Salinas
4. Grupo “Roving”: M.D. Roberts y L. D. Wiencke
5. A todos los shifters que trabajaron durante los meses de Agosto, Septiembre y
Octubre.
Por ultimo, agradecemos a Ricardo Piegaia, quien hizo posible este laboratorio en
PAO.

33
APENDICE A
Método “on-line” para descartar relámpagos y otros eventos
de ruido de los datos del detector de fluorescencia del
proyecto Pierre Auger.
M. SANTANDER1, J. RODRIGUEZ MARTINO
2 , M. LEONI OLIVERA
3, Y. GUARDINCERRI
3
1Observatorio Pierre Auger, Mendoza, Argentina. 2INFN – Sezione di Roma II, Roma, Italia
3Universidad de Buenos Aires, Buenos Aires, Argentina.
Resumen:
Una simple pero poderosa modificación al “trigger” de tercer nivel (T3) del Detector de
Fluorescencia (FD) fue realizada. El propósito de dicha modificación es filtrar eventos
irrelevantes observados por el FD como relámpagos o ruido electrónico. El nuevo filtro analiza
la señal ADC de cada píxel “triggereado” y pide ciertos requerimientos mínimos para que el
evento sea aceptado. Testeamos este nuevo filtro estando “off-line” con una selección de
eventos, así como también durante algunas noches de mediciones reales del FD. En ambos
casos, el filtro, claramente redujo la cantidad de eventos de relámpagos y otros tipos de ruidos.
1 Introducción
Durante los “shifts” de FD (período de adquisición de datos) se observan
muchas noches donde el ratio de eventos T3 aumentan dramáticamente por encima de
su valor típico de 0.03 Hz [1]. Esto genera archivos de datos con muchísimos eventos,
que en su mayoría son relámpagos o ruido electrónico. Aparte de esto, el innecesario
aumento en el ratio T3 produce una perdida sistemática de “triggers” potencialmente
híbridos debido al veto implementado en CDAS [2].
Estudiamos algunos detalles del actual algoritmo T3 y descubrimos que una
simple modificación podía mejorar su rendimiento. El actual T3 es un proceso
multifacético de selección de píxeles y filtrado de eventos. Toma todos los eventos que
pasaron el “trigger” de segundo nivel y, para cada evento, realiza una lista de los píxeles
que serán utilizados en el filtrado T3. Esta lista (T3List) es construida en principio con
todos los píxeles con primer nivel de “Trigger” (T1) que forman un patrón de 5 píxeles
adyacentes (con la posibilidad de uno ausente). Todos los píxeles que no pertenecen a
esta lista no van a contribuir al análisis que se hace posteriormente, incluso si esos
píxeles desechados están disponibles para la reconstrucción “offline” de los eventos.
Luego de algunas verificaciones de consistencia, encuentra toda la información de la
posición de los píxeles de manera de recuperar los datos del ADC.
34
En este punto el programa define el valor del pico de cada píxel de la siguiente
manera: se define un intervalo de tiempo alrededor del tiempo de T1. Dentro de este
intervalo se realiza un promedio de a 3 bines (300 ns) de la traza del ADC. El algoritmo
busca el máximo de este promedio y este valor es asignado como el valor del pico del
píxel. La única excepción, que será de mucha importancia para nuestra modificación, es
cuando el valor del pico encontrado esta por debajo de 2.5 veces sigma de la señal
calculado en los primeros 200 ns. En este caso al valor del pico se le asigna un 0.
Luego de estas definiciones, comienza con el proceso de filtrado. Realiza un
ajuste por cuadrados mínimos de la trayectoria de cada evento. Si un estimador
estadístico de la bondad del ajuste no satisface un criterio específico, descarta el píxel
que esta mas lejos del ajuste y vuelve a ajustar la trayectoria. Hace esto hasta que el
criterio se satisface o hasta que solo queden 3 píxeles, en cuyo caso tira el evento.
Seguidamente, todo este proceso de ajuste y descarte de píxeles se hace de la misma
manera, pero esta vez, el ajuste es entre la altura del píxel y el tiempo de triggereo de
T1.
Se supone, que los ajustes estadísticos de la trayectoria y de la evolución en el
tiempo están hechos para descartar eventos que no son aproximadamente líneas rectas y
eventos que no tienen una evolución temporal consistente con la esperada en una lluvia.
A pesar de estos filtros, existen varios eventos que pasan el T3 y que claramente no
satisfacen aquellos requerimientos a priori. El ejemplo perfecto de esto son los eventos
de relámpagos. Existen otros eventos que podrían satisfacer uno o ambos
requerimientos geométricos y temporales aun no siendo lluvias claramente. El ejemplo
para esto es el ruido electrónico.
Notamos sin embargo, que ambos relámpagos y ruido electrónico tienen en
muchos casos una estructura particular de valores de pico nulos (píxeles nulos) que
pudimos aprovechar. Al estudiar la traza del ADC de eventos de relámpago
encontramos que estos tienen muchos píxeles nulos en la mayoría de los casos. También
observamos que algunos eventos de ruido con pocos píxeles, tenían al menos un píxel
nulo.
Inspirado por estos hechos agregamos un nuevo filtro al código fuente del T3
que llamamos “First Process” (FP). Los únicos requerimientos que este filtro agrega al
T3 son:
• Desechar eventos con menos de 4 píxeles con picos nulos. Estos eventos serían
típicamente producidos por ruido electrónico.
• Desechar eventos con más del 50% de los píxeles con pico nulo. Estos eventos
son típicamente relámpagos y algunos otros eventos grandes, que evidentemente
no son lluvias.
El filtro FP es llamado en el T3 previo a los ajustes lineales; por ende, si un
evento es eliminado por el FP no debería llegar al filtro de ajustes lineales. De esta
forma se ahorra una gran cantidad de tiempo de cálculo, porque grandes eventos como
los relámpagos no serán ajustados más de 200 veces.
Hemos este filtro en repetidas ocasiones, para analizar su rendimiento en
desechar ruido, y para asegurar que la información importante no se perdiera.
35
2 Pruebas al filtro
2.1 Pruebas con eventos de relámpagos y otros eventos de muchos píxeles
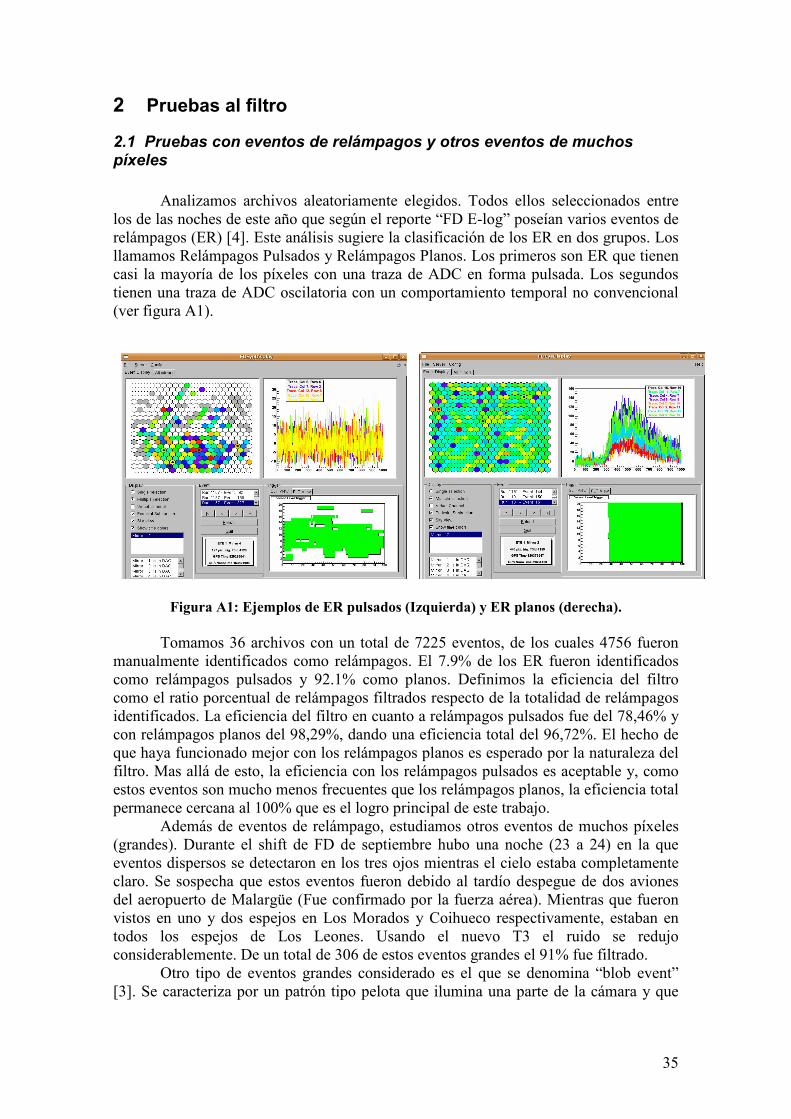
Analizamos archivos aleatoriamente elegidos. Todos ellos seleccionados entre
los de las noches de este año que según el reporte “FD E-log” poseían varios eventos de
relámpagos (ER) [4]. Este análisis sugiere la clasificación de los ER en dos grupos. Los
llamamos Relámpagos Pulsados y Relámpagos Planos. Los primeros son ER que tienen
casi la mayoría de los píxeles con una traza de ADC en forma pulsada. Los segundos
tienen una traza de ADC oscilatoria con un comportamiento temporal no convencional
(ver figura A1).
Figura A1: Ejemplos de ER pulsados (Izquierda) y ER planos (derecha).
Tomamos 36 archivos con un total de 7225 eventos, de los cuales 4756 fueron
manualmente identificados como relámpagos. El 7.9% de los ER fueron identificados
como relámpagos pulsados y 92.1% como planos. Definimos la eficiencia del filtro
como el ratio porcentual de relámpagos filtrados respecto de la totalidad de relámpagos
identificados. La eficiencia del filtro en cuanto a relámpagos pulsados fue del 78,46% y
con relámpagos planos del 98,29%, dando una eficiencia total del 96,72%. El hecho de
que haya funcionado mejor con los relámpagos planos es esperado por la naturaleza del
filtro. Mas allá de esto, la eficiencia con los relámpagos pulsados es aceptable y, como
estos eventos son mucho menos frecuentes que los relámpagos planos, la eficiencia total
permanece cercana al 100% que es el logro principal de este trabajo.
Además de eventos de relámpago, estudiamos otros eventos de muchos píxeles
(grandes). Durante el shift de FD de septiembre hubo una noche (23 a 24) en la que
eventos dispersos se detectaron en los tres ojos mientras el cielo estaba completamente
claro. Se sospecha que estos eventos fueron debido al tardío despegue de dos aviones
del aeropuerto de Malargüe (Fue confirmado por la fuerza aérea). Mientras que fueron
vistos en uno y dos espejos en Los Morados y Coihueco respectivamente, estaban en
todos los espejos de Los Leones. Usando el nuevo T3 el ruido se redujo
considerablemente. De un total de 306 de estos eventos grandes el 91% fue filtrado.
Otro tipo de eventos grandes considerado es el que se denomina “blob event”
[3]. Se caracteriza por un patrón tipo pelota que ilumina una parte de la cámara y que
36
tiene una traza anómala de ADC. Pasando el filtro a través del “run” 455 de los Leones
encontramos que el nuevo T3 filtra el 66% de los eventos.
2.2 Pruebas durante un “shift” de adquisición de FD
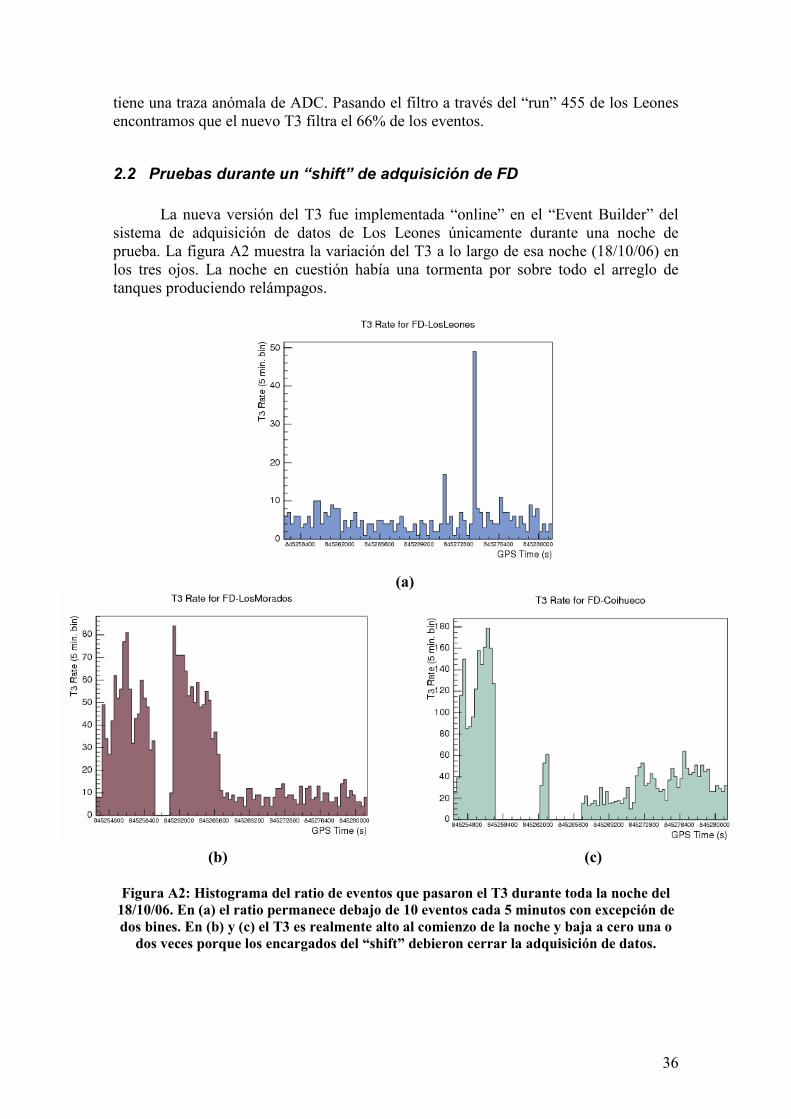
La nueva versión del T3 fue implementada “online” en el “Event Builder” del
sistema de adquisición de datos de Los Leones únicamente durante una noche de
prueba. La figura A2 muestra la variación del T3 a lo largo de esa noche (18/10/06) en
los tres ojos. La noche en cuestión había una tormenta por sobre todo el arreglo de
tanques produciendo relámpagos.
(a)
(b) (c)
Figura A2: Histograma del ratio de eventos que pasaron el T3 durante toda la noche del
18/10/06. En (a) el ratio permanece debajo de 10 eventos cada 5 minutos con excepción de
dos bines. En (b) y (c) el T3 es realmente alto al comienzo de la noche y baja a cero una o
dos veces porque los encargados del “shift” debieron cerrar la adquisición de datos.
37
Este grafico muestra que ratio de eventos T3 en Los Leones fue mas homogéneo
y marcadamente mas bajo que en los otros ojos. Todos los eventos filtrados fueron
manualmente verificados y se encontró que eran relámpagos.
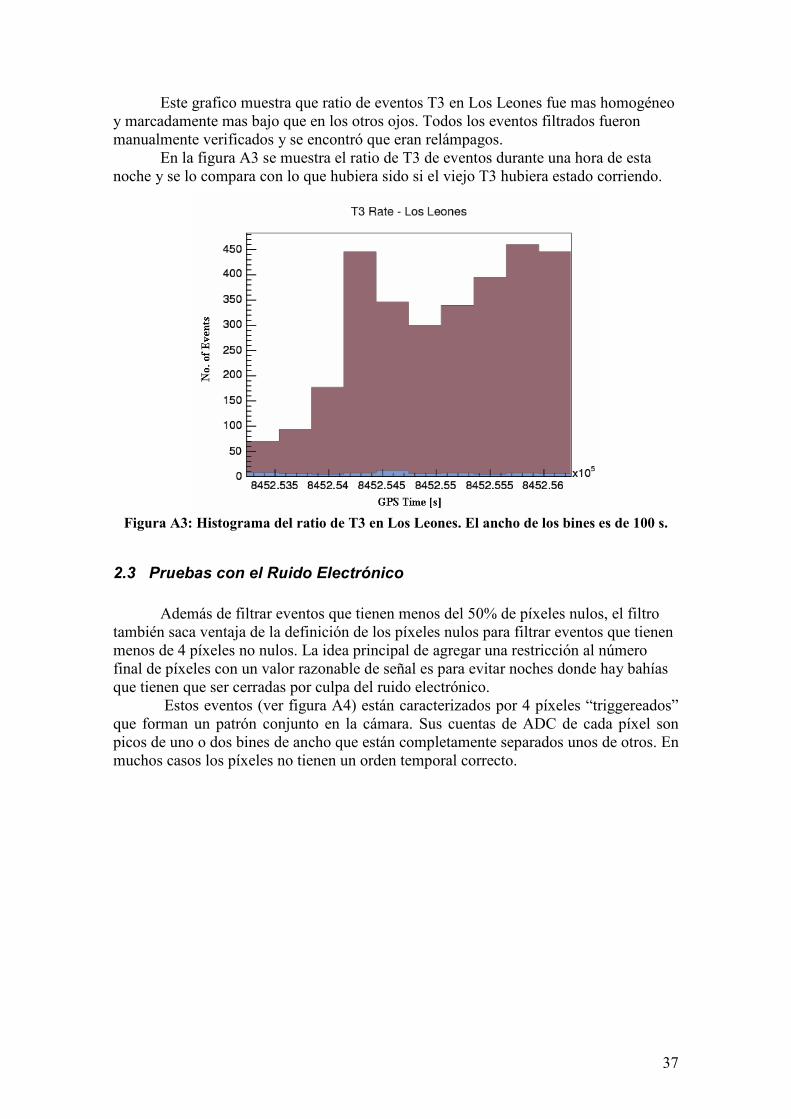
En la figura A3 se muestra el ratio de T3 de eventos durante una hora de esta
noche y se lo compara con lo que hubiera sido si el viejo T3 hubiera estado corriendo.
Figura A3: Histograma del ratio de T3 en Los Leones. El ancho de los bines es de 100 s.
2.3 Pruebas con el Ruido Electrónico
Además de filtrar eventos que tienen menos del 50% de píxeles nulos, el filtro
también saca ventaja de la definición de los píxeles nulos para filtrar eventos que tienen
menos de 4 píxeles no nulos. La idea principal de agregar una restricción al número
final de píxeles con un valor razonable de señal es para evitar noches donde hay bahías
que tienen que ser cerradas por culpa del ruido electrónico.
Estos eventos (ver figura A4) están caracterizados por 4 píxeles “triggereados”
que forman un patrón conjunto en la cámara. Sus cuentas de ADC de cada píxel son
picos de uno o dos bines de ancho que están completamente separados unos de otros. En
muchos casos los píxeles no tienen un orden temporal correcto.

38
Figura A4: Ejemplo de evento de ruido producido por la electrónica.
La nueva modificación al T3 tomara ventaja sobre el hecho que hay muchos de
estos eventos que tienen un valor de pico demasiado bajo con respecto a su varianza. En
un típico archivo de dato hay muchos de estos tipos de eventos. Pero en particular
durante el mes de Agosto hubo noches inusuales en las que estos eventos dominaron la
totalidad de la adquisición de datos sin causa aparente. El nuevo filtro fue testeado en 3
archivos (1743, 1746 y 1748 de Coihueco) correspondientes a estas noches y devolvió
una eficiencia de 98%.
Sin embargo estas noches dominadas por ruido electrónico no son un
comportamiento común en el proceso de adquisición de datos. Usualmente, en una
noche normal hay muchos eventos de 4 píxeles, sin embargo no son suficientes para
aumentar el ratio T3 a valores anormales. Aunque no sea el propósito principal de esta
modificación, testeamos el nuevo T3 en 5 archivos (“runs”) con un total de 744 eventos
de 4 píxeles. 380 de estos eventos eran definitivamente eventos de los que consideramos
de ruido. Sobre estos evento ruidosos el filtro solo mostró una eficiencia de alrededor
del 40%. La eficiencia no es lo suficientemente alta para considerar este problema
resuelto. Para mejorarlo debería haber un minucioso estudio de estos eventos de 4
píxeles para tener mejor definida la manera de descartarlos.
2.4 Pruebas con eventos reconstruidos
La otra prueba crucial a la que el filtro debe ser sometido es su comportamiento
con eventos que se sabe son lluvias. Para este propósito tomamos todos los eventos
hasta septiembre de este año (2006) del “The Auger Observer” en el Forschungszentrum
Karlsruhe [4]. Todos estos eventos ya habían sido previamente identificados como
lluvias y reconstruidos.
Usando el nuevo filtro analizamos estas lluvias tomando cortes en su número de
píxeles “triggereados”, y solo tomando en cuenta eventos con un nivel 10 de
reconstrucción (se pudo obtener la energía de la lluvia). La eficiencia del filtro fue
analizada para todos los eventos pero para cada uno de los cortes de número de píxel
separadamente. Los cortes de píxel elegidos fueron: lluvias con 4 píxeles, con 5 píxeles,
con entre 6 y 10 píxeles, con entre 11 y 20 píxeles, y con mas de 20 píxeles. La elección
39
para estos cortes fue adoptada por que se esperaba que el filtro mostrase un diferente
comportamiento con lluvias de diferente número de píxeles. La siguiente tabla muestra
el resultado:
Numero de píxeles Numero de eventos
% de eventos descartados
4 62 8% 5 154 2.6%
>5 & ≤10 1332 1.5% >10 & ≤20
>20 2335 2820
0% 0%
All 6703 0.4%
Tabla A1: Descarte de eventos del nuevo T3.
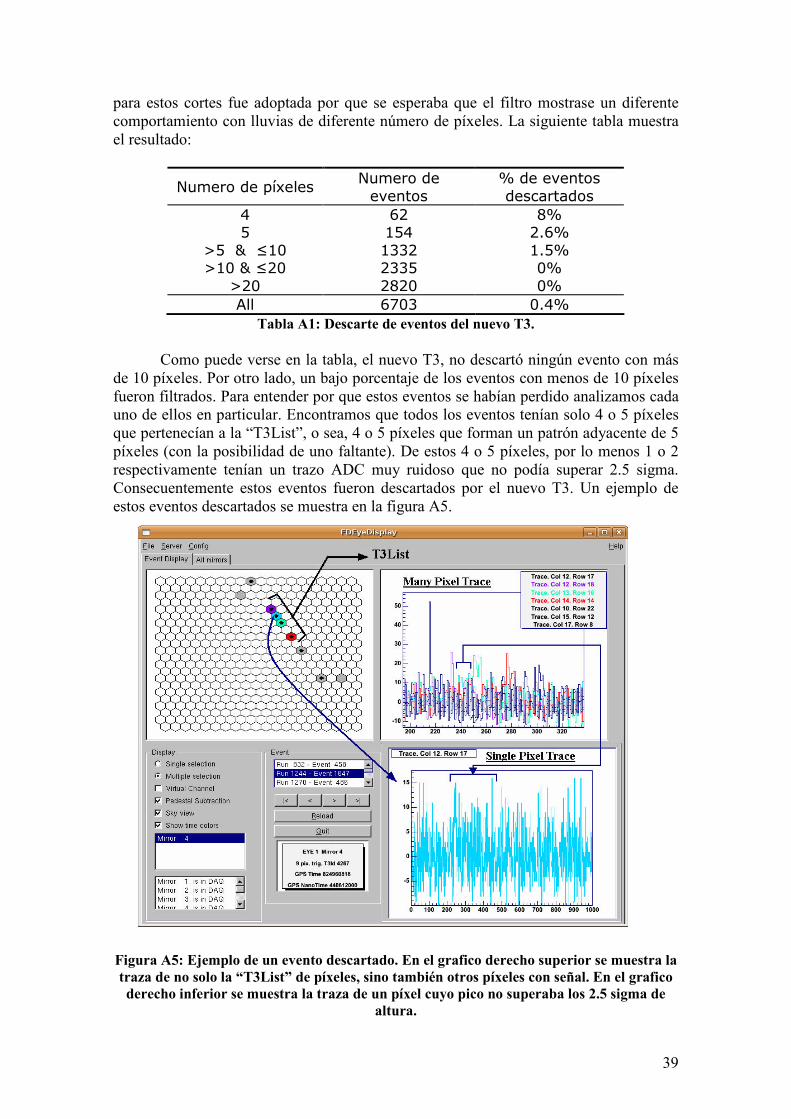
Como puede verse en la tabla, el nuevo T3, no descartó ningún evento con más
de 10 píxeles. Por otro lado, un bajo porcentaje de los eventos con menos de 10 píxeles
fueron filtrados. Para entender por que estos eventos se habían perdido analizamos cada
uno de ellos en particular. Encontramos que todos los eventos tenían solo 4 o 5 píxeles
que pertenecían a la “T3List”, o sea, 4 o 5 píxeles que forman un patrón adyacente de 5
píxeles (con la posibilidad de uno faltante). De estos 4 o 5 píxeles, por lo menos 1 o 2
respectivamente tenían un trazo ADC muy ruidoso que no podía superar 2.5 sigma.
Consecuentemente estos eventos fueron descartados por el nuevo T3. Un ejemplo de
estos eventos descartados se muestra en la figura A5.
Figura A5: Ejemplo de un evento descartado. En el grafico derecho superior se muestra la
traza de no solo la “T3List” de píxeles, sino también otros píxeles con señal. En el grafico
derecho inferior se muestra la traza de un píxel cuyo pico no superaba los 2.5 sigma de
altura.

40
De este análisis nos percatamos que el responsable de los descartes de eventos
era claramente la condición de 4 píxeles no-nulos.
3 Conclusiones
La primera ventaja de este filtro parte de su simplicidad lo que implica mayor
velocidad computacional y transparencia en el filtrado. El principal éxito de la
modificación del filtro T3 es que logra tratar muy eficientemente con el problema de los
relámpagos. Cuando el sistema de “triggereo” del detector FD trabaja durante una noche
con relámpagos, los archivos de datos se llenan de eventos irrelevantes de muchos
píxeles. Estos eventos deberían ser eventualmente eliminados “offline”. Este problema
podría también afectar la capacidad del sistema central de adquisición de datos de
“triggerear” el detector SD, por la saturación de sus recursos, por tener que manejar
tanta información junta. Consecuentemente un buen filtro “en línea” no solo elimina
eventos indeseados de la adquisición de datos sino que además aumenta la posibilidad
de medir eventos híbridos que no se le los hubiera tenido en cuenta. Sumado a esto, en
el futuro, el proceso de adquisición de datos podría pasar a ser automático y esta
modificación podría ser utilizada para decidir cuando las compuertas deberían ser
cerradas en caso de haber muchos relámpagos.
En suma, de los dos requerimientos que definen al filtro concluimos:
• La condición de “ratio del 50% de píxeles nulos” produjo un muy eficiente
filtrado de eventos de relámpagos. También tuvo éxito en no filtrar lluvias. Ni
siquiera una lluvia reconstruida fue descartada por esta condición.
• La condición de 4 píxeles no-nulos demostró que podía filtrar muchos eventos
ruidosos. Por otro lado descarto una cantidad no tan trivial de lluvias con un bajo
número de píxeles. Esto deja abierta la pregunta de si conviene usar esta
condición o no.
4 Implementación
Luego de hablar con algunos expertos en el “meeting” de Noviembre de 2006
decidimos implementar solo el primer requerimiento relajándolo un poco [5]. Durante
las pruebas habíamos pedido descartar los eventos si habían 50% o mas píxeles con pico
nulo. Ahora pedimos solo descartar eventos si hay más del 50% de píxeles con pico
nulo.
Al eliminar la segunda condición y relajar la primera no se filtran ninguna de las
lluvias que habían sido eliminadas de acuerdo a lo especificado en la tabla 1.
Para el futuro tenemos también la idea de agregar una opción para poder usar el
segundo requerimiento en caso en que haya una noche con muchos eventos ruidosos de
cuatro píxeles.

41
Referencias del Apéndice A
[1] FD Step by Step. FD wiki pages.
http://wiki.auger.org.ar/doku.php?id=fd:fd_shift_-_quick_start
[2] HoughFilter: a method for rejecting high multiplicity noise events in FD data. S.
Petrera, F. Salamida, D. D’Urso. GAP-2006-053. Pierre Auger Collaboration
[3] FD E-Log. FD wiki pages. http://www.auger.org.ar/cgi-bin/Elog/det-system-
elog.pl?nb=fd&action=view&page=82&scroll=true
[4] “The Auger Observer” Offline. Forschungszentrum Karlsruhe.
http://augerobserver.fzk.de/
[5] Private communications with Paolo Previtera, Sergio Petrera and Michael Unger.