data detection, channel equalisation & estimation · correlation between channel coefficients)...
TRANSCRIPT

Data Detection, Channel Equalisation &
Estimation
EIT 140, tom<AT>eit.lth.se

Coherent and noncoherent detection
absolute modulation −→ coherent detection
differential modulation −→ noncoherent detection
symbol i − 1
symbol i
channel
channel i − 1
channel i
equalizer
i is an index in time (multicarrier symbol No.) or frequency (subcarrier No.)

Coherent and noncoherent detection, cont’d
absolute modulation −→ coherent detection
information lies in the choice of symbol from constellationrequires channel equalisation and estimationperformance depends on channel estimation (which itself depends oncorrelation between channel coefficients)
differential modulation −→ noncoherent detection
information lies in the difference between two consecutive symbolsno need for channel equalisation and estimation (fewer pilots)depending on channel’s coherence properties, differential modulationin
time (compare to same subcarrier in previous multicarrier-symbol)frequency (compare to adjacent subcarrier in samemulticarrier-symbol)
performance depends on correlation between channel coefficientshigher BER compared to coherent demodulation but less overhead(fewer pilots)

OFDM: differential modulation in time
multicarrier symbol No. n −→
←−
subcarrierNo.k
diff. modulation in time
→→→→→→→→→→→→→→→→→
diff. phase modulation: xk,n=e jϕk,nH [k,n]=ck,ne
jφk,n
−→ yk,n
=ck,nej(ϕk,n+φk,n)+wk,n
noncoherent detection in time: x̂ k,n = yk,n
y ∗k,n−1
x̂ k,n=ck,nck,n−1e j(ϕk,n−ϕk,n−1+φk,n−φk,n−1)+wk,nw∗k,n−1+wk,ny
∗k,n−1+w∗k,n−1yk,n
Grey subcarriers are pilots providing an initial phase reference
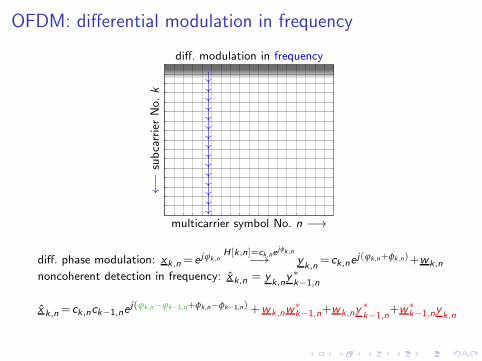
OFDM: differential modulation in frequency
multicarrier symbol No. n −→
←−
subcarrierNo.k
diff. modulation in frequency
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓
diff. phase modulation: xk,n=e jϕk,nH [k,n]=ck,ne
jφk,n
−→ yk,n
=ck,nej(ϕk,n+φk,n)+wk,n
noncoherent detection in frequency: x̂ k,n = yk,n
y ∗k−1,n
x̂ k,n=ck,nck−1,nej(ϕk,n−ϕk−1,n+φk,n−φk−1,n)+wk,nw
∗k−1,n+wk,ny
∗k−1,n+w∗k−1,nyk,n

Least squares (LS) approach
Consider the modely = Ax, (1)
where A ∈ Rm×n is a strictly skinny (m > n) deterministic and known
coefficient matrix, y is a deterministic and known vector and x is unknown.
for most y, there is no x that solves (1) (by solves we mean exactly)
An approach to find a “good” approximation x that approximately solves (1) isthe following
define the error e = Ax− y
find xLS that minimises the Euclidean norm ‖e‖2=√eTe of the error, i.e.,
xLS = argminx‖e‖2 (2)
The approximate “solution” xLS is called least squares solution. Note:
minimising ‖e‖2 corresponds to minimising the energy of the error
parameter x and error e are deterministic—least squares is a deterministicapproach

LS geometric interpretation
The least squares solution xLS minimises the Euclidean distance between AxLSand y
R(A) is the n-dimensional subspace spanned by the columns of A
Ax is a projection of the point y onto R(A) (and thus lies in R(A))among all projections, the orthogonal projection AxLS minimises ‖e‖2
R(A)
y
e
AxLS

LS solution
assume that A is full rank (rank{A} = n)
xLS minimises both ‖e‖2 and ‖e‖22‖e‖22= eTe = xTATAx− xTATy− yTAx+ yTy = xTATAx− 2xTATy+ yTy
to minimise ‖e‖22, we set the gradient ∇x ‖e‖22 to zero
∇x ‖e‖22= 2ATAx− 2ATy!= 0
this yields the so-called normal equations ATAx = ATy
since A is full rank, ATA is nonsingular n× n matrix
the least squares solution is thus
xLS =(
ATA)−1
ATy
similarly, in the complex-valued case we obtain: xLS =(
AHA)−1
AHy

Minimum mean square error (MMSE) estimation
Consider a length-n parameter vector x to be estimated from a length-mobservation vector y
assumption: parameters are realisation of a random vector x withcovariance matrix Cxx = E
{xxT
}
An approach to find a “good” linear estimate x̂ = Gy of x is the following
define the error e = x− x̂ = x−Gy
find xMMSE that minimises the mean of the squared error, i.e.,
xMMSE = argminx̂
E{
‖e‖22}
(3)
xMMSE is called minimum mean square error (MMSE) estimate. Note:
parameter x and error e are stochastic—MMSE is a Bayesian estimationapproach
Assumption: all random variables/vector have mean zero (correlation and covarianceare identical)

MMSE geometric interpretation
Scalar case (n = 1): the MMSE estimate xMMSE minimises the Euclideandistance between xMMSE and x
components of y span an m-dimensional subspace YgTy is a projection of x onto Y (and thus lies in Y)among all projections, the orthogonal projection xMMSE = gMMSE
Ty of xonto Y minimises the mean of ‖e‖2x − gMMSE
Ty is orthogonal to Y , which implies E{(x − gMMSE
Ty)y}= 0
Y
x
xMMSE

MMSE solution
xMMSE has to fulfil E{(x − gMMSE
Ty)y}= 0
consequently, E {yx} − E{gMMSE
Tyy}= E {yx}
︸ ︷︷ ︸
cyx
−E{
yyT}
︸ ︷︷ ︸
Cyy
gMMSE = 0
this yields the so-called Wiener-Hopf equations CyygMMSE = cyx
whose solution is gMMSE = C−1yycyx
the MMSE solution is thus
xMMSE = cyxTC−1
yyy
similarly, in the complex-valued vector-case we obtain: xMMSE = CHyxC
−1yyy
Applications for LS and MMSE
data estimation (equalisation)
channel estimation
channel shortening

Linear equalisation
x
w
x̂y
RH RZadd ZremH G
transmitter channel receiver
y = RZrem
(
HZaddRHx+w
)
= RZremHZaddRH
︸ ︷︷ ︸
A
x+RZremw︸ ︷︷ ︸
w′
for L ≥ M: ZremHZadd is circulant and RZremHZaddRH is diagonal
linear equalisation: x̂ = Gy
depending on the design of G, we distinguish
least-squares design −→ zero-forcing equaliser xZF = GZFy
MMSE design −→ MMSE equaliser xMMSE = GMMSEy

Least squares design: zero-forcing equaliser
xLS = (AHA)−1AH
︸ ︷︷ ︸
GLS
y
if A is diagonal, GLS is diagonal
zero-forcing equaliser GLS for a given channel H, is the inverse A−1 (ifthis inverse exists, i.e., if A has no zeros on its diagonal)
if the channel exhibits spectral nulls on the FFT grid (A has zeros on itsdiagonal), a pseudo inverse can be constructed
Note:
LS design does not consider the noise in the model −→ xLS can bearbitrarily off (noise amplification)
the zero-forcing equaliser tries to force the interference to be zeroregardless of the consequences caused by the noise

MMSE design: MMSE equaliser
xMMSE = CxxAH(
ACxxAH +Cw′w′
)−1
︸ ︷︷ ︸
GMMSE
y
Cxx = E{xxH
}is the covariance matrix of the transmit data
Cw′w′ = E{w′w′H
}is covariance matrix of the received noise
if A, Cxx and Cw′w′ are diagonal, GMMSE is diagonal
Cw′w′ “stabilises” the inverse (even if A has zeros on its diagonal)
Note:
instead of fighting exclusively the interference, the MMSE equaliser aimsat minimising the mean of the (total) squared error
prior information (covariance matrices of transmit signal and noise,respectively) is required

Multicarrier equalisation
probably the biggest advantage of OFDM: equalisation is trivial
channel partitioning leads to parallel narrow-band frequency-flatsubchannels
multiplication of each subchannel by a scalar does not change thesub-channel SNR
still, equalisation of the complex-valued multiplication factors caused byeach subchannel is necessary before detection
example: Maximum-likelihood symbol detection for QAM
nevertheless, in order to do this per-subchannel equalisation (thecorresponding device is often referred to as frequency-domain equaliser(FEQ)), we need to know these complex-valued coefficients: → channelestimation (is not trivial)

Frequency-domain equalisation (FEQ)
As long as L ≥ M holds, multicarrier equalisation reduces to multiplication witha complex scalar per subchannel.The ZF equaliser written in DFT-domain is
HZF[k ] =1
H [k ]=
H∗[k ]|H [k ]|2 , k = 0, . . . ,N − 1,
where k denotes the subcarrier (subchannel) index.The MMSE equaliser in DFT-domain is given by
HMMSE[k ] =H∗[k ]
|H [k ]|2 +Cw′w′ [k , k ], k = 0, . . . ,N − 1,
where Cw′w′ [k , k ] describes the noise power (or equivalently, the noise variance
for zero-mean noise) of the kth subchannel.
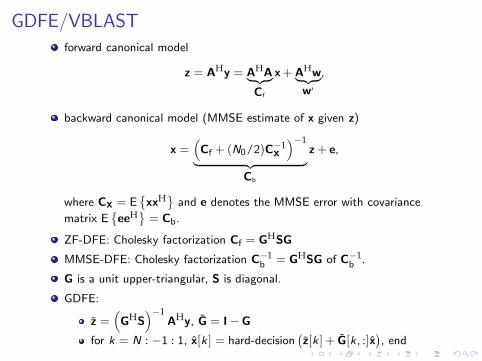
GDFE/VBLAST
forward canonical model
z = AHy = AHA︸ ︷︷ ︸
Cf
x+AHw︸ ︷︷ ︸
w′
,
backward canonical model (MMSE estimate of x given z)
x =(
Cf + (N0/2)C−1x
)−1
︸ ︷︷ ︸
Cb
z+ e,
where Cx = E{xxH
}and e denotes the MMSE error with covariance
matrix E{eeH
}= Cb.
ZF-DFE: Cholesky factorization Cf = GHSG
MMSE-DFE: Cholesky factorization C−1b = GHSG of C−1
b .
G is a unit upper-triangular, S is diagonal.
GDFE:
z̃ =(
GHS)−1
AHy, G̃ = I−G
for k = N : −1 : 1, x̂[k ] = hard-decision(z̃[k ] + G̃[k , :]x̂
), end

Scalar precoding: principle of Tomlinson/Harashima
transmit modM (x + q) instead of x + q
perform modulo-operation modM (y)
q
q
+1
+3
+5
+7
+9
+11
−1−3−5−7−9−11
channel modM

Vector precoding
1 Factorize P = QR. (Q is unitary. R is unit upper-triangular)
ttP R Q
p
pQH
2 Recursive substitution. Example:
1 −1 2 10 1 3 20 0 1 20 0 0 1
︸ ︷︷ ︸
R
+1−3+1+3
︸ ︷︷ ︸
t
=
9673
−→
1 −1 2 10 1 3 20 0 1 20 0 0 1
︸ ︷︷ ︸
R
+25+13−7+3
︸ ︷︷ ︸
t
=
1−2−13
3 An additive component p can be easily included

Channel estimation
pilot-based (time-frequency grid)
pilot allocation must fulfil Nyquist theorem in time and frequency:
pilot-spacing in time ∆t must fulfil ∆t < Tcoh = 1/Bdop
pilot-spacing in frequency ∆f must fulfil ∆f < Bcoh = 1/τmax
one-/two-dimensional estimation techniquesdifferent pilot allocation for continuous (broadcast) and packettransmission
decision-directed
uses only a few known symbols at the beginning of transmissionfurther channel estimation is based on (hopefully) correct datadecisions which allows channel estimation using all causal subcarriersperformance depends again on coherence properties of the channel

Examples for pilot allocation
continuous transmission
multicarrier symbol No. −→
←−
subcarrierNo.
packet transmission
multicarrier symbol No. −→←−
subcarrierNo.
Light-grey subcarriers are used for synchronisation

Time-domain equalisation (TEQ)
whole multicarrier concept falls apart if L < M (intersymbol interference(ISI) and inter-carrier interference (ICI))
100 L/(N + L)% of the achievable rate (or equivalently, of the transmitpower) are inherently wasted −→ the smaller L = M, the better
goal of time-domain “equalisation”: shorten the channel dispersion M toM1 < M
s(n)
channel receiver
TEQ
DFThTEQ(n)R ′[k ]
h(n)
w(n)
r(n) r ′(n)

TEQ design
The desired result of the linear convolution of the transversal filterhEQ(n), n = 0, . . . ,K of length K + 1 and the channel can be described usingconvolution matrix notation:
0...0
r ′(0)r ′(1)...
r ′(M1)0...0
=
h(0) 0 . . . 0
h(1) h(0)...
h(1). . . 0
.... . . h(0)
h(1)h(M)
h(M)...
.... . .
0 . . . 0 h(M)
hEQ(0)hEQ(1)
...hEQ(K )
omit the rows that yield r ′(n), 1 ≤ n ≤ M1 (“don’t care”)
keep the row yielding r ′(0) and fix that coefficient

TEQ design: least-squares problem
Least-squares problem formulation:
0...010...0
︸︷︷︸
r′
=
h(0) 0 . . . 0
h(1) h(0)...
.... . . h(0)
h(M ′) h(1)h(M)
h(M)...
.... . .
0 . . . 0 h(M)
︸ ︷︷ ︸
H′
hEQ(0)hEQ(1)
...hEQ(K )
︸ ︷︷ ︸
hEQ
+e,
We are looking for a solution hEQ that makes the error e as small as possibleThis operation has to be repeated for all possible positions of the 1 in r′.

TEQ design: solution of the least-squares problem
Least-squares problem formulation:
r′ = H′hEQ + e
Find the hEQ that minimises the squared Euclidean norm ||e||22 of the error e.The impulse response that yields this minimum is denoted
hTEQ = argminhEQ
||e||22. (4)
Equation (4) formulates the least squares problem
the parameter hEQ is deterministic
we did not invoke any statistics
there is no expectation in (4)
The solution to (4) is given by
hTEQ =(
H′HH′)−1
H′Hr′.

Summary
1 Coherent and noncoherent detection
absolute modulation −→ channel equalisation, coherent detectiondifferential modulation −→ noncoherent detection
2 Estimation principles
least squaresMMSE
3 Data estimation
least-squares design −→ zero-forcing equaliserMMSE design −→ MMSE equaliserequalisation in OFDM: one multiplication per subcarrierGDFE, THP, TEQ