cristina sabariego y lucia duran 3 c
TRANSCRIPT

Lucía Durán López y Cristina Sabariego Almazán
3ºC Instituto Aricel

Tema 8 Máquinas automáticas y robots
1. Máquinas automáticas y robots.2. Antecedentes y breve historia de los robots3. Clasificación y aplicaciones de los robots4. Partes de un robots5. Funcionamiento de los robots6. Movilidad de los robots.

1. Máquinas automáticas y robots
Estamos habituados a utilizar infinidad de máquinas cuyo cometido es realizar tareas que antes se hacía de forma manual.
Otras son capaces de realizar cierta acciones o tareas, por ejemplo el limpiabrisas del coche con sensor de lluvia, a estas máquinas se las denomina automáticas.
Podemos encontrar infinidad de ejemplos en diversos campos de la actividad humana: máuinas embaladores, expendedoras, domésticas...
Para que las máquinas automáticas puedan considerarse robots deben tener las siguientes características:- Estar diseñadas para realizar diversa tareas como soldar, mover piezas, pintar, cortar...-Estar controladas por ordenador y poderlas programar cuantas veces se desee.-Disponer de sensores para interactuar con el entorno.En la actualidad, podríamos decir que un robot es una máquinas más o menos compleja diseñada para realizar trabajos peligrosos, que puede ser programada y es capaz de interactuar con el entorno.
En la actualidad, podríamos decir que un robot es una máquinas más o menos compleja diseñada para realizar trabajos peligrosos, que puede ser programada y es capaz de interactuar con el entorno.
España ocupa el 7º lugar en el mundo y 4º en Europa con 22.000 robots
La mayoría de los robots que se fabrican se
utilizan en la industria.En 2005, había en el mundo
aproximadamente850.000 robots
industriales instalados
Según Bil Gates, fundador de microsoft,
en los próximos 30 años la robótica puede
exprimentar un salto expectacular
en diversos ámbitos
Los robots presentan ventajas
frente al trabajo humano,no se cansan,rinden más y tienen gran precisión

A lo largo de la historia, infinidad de ingenios que perseguían la finalidad de construir máquinas capaces de realizar tareas imitando a los humanos.En la actualidad, las investigaciones están encaminadas hacia la creación de sistemas capaces de resolver problemas y tomar decisiones por sí mismas.
En su origen, los autómatas eran artefactos mecánicos que imitaban los movimientos de un ser animado.A las máquinas con forma humana, se les llamó Androides.
2. Antecedentes y breve historia de los robots

Herón de Alejandría
● Describe,ingenios que se mueven por sí solos aprovechando circuitos de agua o vapor
Podemos ver un sistema
De abrir las puertasDel templo cuando
Se encendía Una llama

El gallo de Estrasburgo
● Es el autómata mas antiguo que se conserva
● Fué instalado en el reloj de la catedral de Estrasburgo
Este gallo movía el pico y las alas
cuando daba las horas en la catedral

EL pato de Vaucanson ● Fue un ingenio que hizo
furor en la época.
● Estaba compuesto por más de 400 piezas y era capaz de comer grano,alargando el cuello y graznaba
Era capaz de completar la digestión realizando unaDisolución de los alimentos
Que ingería hasta llegarA evacuarlos

El telar de Jacquard ● Consistía en una
máquina textil programable con tarjetas de cartón perforadas.Permiia a operarios no expertos relizar dibujos exactos en la tela
Las hebras de hilo se controlaban a través
de un sistema que Utilizaba las tarjetas de
Cartón perforadas

Tipos Características y aplicaciones
●Adroides -Disponen de un sistema de locomoción que imita a los de algunos animales
-Se pueden clasificar en caminadores o no caminadores
-La aplicación de estos robots está centrada en el estudio de volcanes y la exploración espacial
Tipo Carcterísticas y aplicaciones
Zoomórficos -Disponen de un sistema de locomoción que imita los de algunos animales.
.Se pueden clasificar en caminadores y no caminadores.
-La aplicación de estos robots está centrada en el estudio de volcanes y la exploración espacial.
Tipo Carcterísticas y aplicaciones
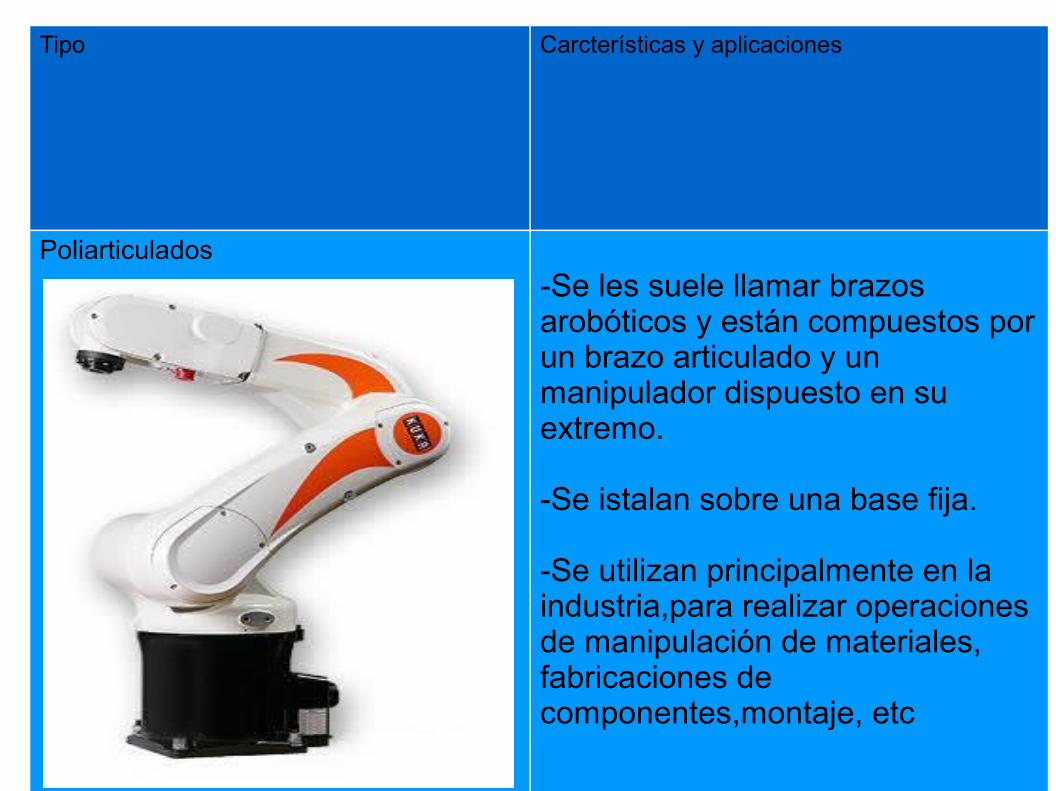
Poliarticulados
-Se les suele llamar brazos arobóticos y están compuestos por un brazo articulado y un manipulador dispuesto en su extremo.
-Se istalan sobre una base fija.
-Se utilizan principalmente en la industria,para realizar operaciones de manipulación de materiales, fabricaciones de componentes,montaje, etc

Tipo Carcterísticas y aplicaciones
Móviles -Están provistos de patas,ruedas u orugas.
-Se utilizan para transportar materiales o piezas en almacenes o en cadenas de producción.
-También se utilizan para la exploración espacial o submarina.
-Pueden ser autónomos o teledirigidos.
4. Partes de un robotEstructura: Generalmente de metal o plástico, tiene la función de soportar los distintos elementos del robot y
permitirles el movimiento.Elementos motrices o actuadores: Generan todos los
movimientos del robot. Pueden ser eléctricos , neumáticos o hidráulicos.
Elementos ejecutores o terminales: Realizan las tareas para las que el robot ha sido diseñado. En los robots industriales pueden ser pinzas o herramientas
articuladas al brazo robótico.Controladores: Generalmente son ordenadores que
pueden estar ubicados en el interior o exterior del robot.Sensores: Detectan el entorno del robot. Pueden ser de
posición, sonido, visión...

5. Funcionamiento de los robots
Su funcionamiento se basa en la captación de señales del exterior mediante sensores.
Compuesto básicamente por un microprocesador y un programa específico, realiza el tratamiento de los datos de entrada.
En la última fase los datos procesados activan los elementos actuadores por un lado y los
elementos ejecutores o terminales por otro, de tal manera que permitirán la ejecución de las
acciones correspondientes.


6. Movilidad de los robots
Para conseguir un funcionamiento correcto de los dos circuitos , simplemente hemos de intercalar los contactos normalmente cerrados de los microrruptores entre los contactos de los conmutadores.

El funcionamiento sería el siguiente:1. Si el doble conmutador está en la posición de
cerrar la pinza, al pulsar, la pinza empezará a cerrarse.
2. Si mantenemos el pulsador apretado, la pinza se abrirá, interrumpiendo la circulación de
corriente y parando el motor, aunque continuemos apretando el pulsador.
3. El motor sólo volverá a funcionar si cambiamos el sentido de giro mediante el doble conmutador y
volvemos a accionar el pulsador.4. Al llegar al otro final de carrera, el motor
volverá a pararse automáticamente.
7. Robots con sistemas mecánicos y eléctricos.Vamos a analizar un sencillo robot móvil:
Estructura: *El desplazamiento del robot, se realiza sobre tres ruedas, dos motores y una rueda loca. Este sistema
permite que las dos ruedas motrices estén siempre en contacto con el suelo, dado que con cuatro ruedas, en
terreno desigual, una podría quedar al aire.* Para la estabilidad del robot conviene en cuenta que su
centro de gravedad ha de estar los más bajo posible.* Las antenas irán colocadas en la parte delantera con
objeto de detectar los obstáculos con garantía.

* Son los encargados de generar y transmitir el movimiento. Los actuadores utilizados son dos motores eléctricos , uno para cada rueda que deberán disponer
de una reductora de velocidad.
Sensores:Son los encargados de proporcionar al robot información
del entorno.
Control automático del movimiento:Se realiza a partir del esquema en el que se utiliza un
interruptor de puesta en marcha y dos microrruptores de tres contactos para cambiar el sentido de giro de los
motores.

Bibliografía:
Libro de tecnología 3º eso INNOVA II
F.J, R. Martínez, E. Nogueira, S.Resa

Actividades:1.Lee el texto sobre los antecedentes y breve
historia de lor botos y relaciona:
-Utiliza una cámara Y estaba controlado Por ordenador.
-Utilización de máquinas Simples y circuitos deAgua y vapor.
.Mecanismos de relojería
-Aparación del ordenador y Primer robor programable
Brazo de Stanford
Herón de Alejandría
Pato de Vaucanson
Unimation
¿Quién fórmulo las tres leyes de la robótica?
Fueron formuladas por Isaac Asimov
¿Por qué crees que las formuló?
Para que los robots sean lo bastante evolucionados para vivir entre los hombres y ser
capaces de tener razonamientos abstractos
Leyes de la robótica
1-Un robot no puede hacer daño a un ser humano,o, por medio de la inacción permitir que un ser humano sea lesionado2-Un robot debe obedecer las órdenes recibidas por los seres humanos, excepto si estas órdenes entrasen en conflicto con la primera ley3- Un robot debe proteger su propia existencia en la medida en que esta protección no sea incompatible con la primera y segunda ley

Links
1-historia de como funcionan los robots 2- La robótica a través de la historia
3- Robot japonés4- Armar una silla con un robot