cpsc 322 lecture 12 - cs.ubc.capoole/cs322/2018/slides/lect12s.pdf · elect_cbd.ail load into ailog...
TRANSCRIPT

Announcements
Assignment 5 due today
Assignment 6 (smaller than others) available sometimetoday
Midterm: 27 February.I You can bring in a letter sized sheet of paper with
anything written in it.I Exam will cover material up to Wednesday of this weekI It assumes what is covered in class as well as the content
of the assignments.I Practice midterm available this week
We have been promised more reliable lecture recording.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 1 / 37

Review: Propositions and Inference
KB |= g (g is a logical consequence of KB) if and only ifg is true in every model of KB .
The bottom-up proof procedure computs all consequencesof a knowledge base.
Top-down proof procedure searches from the goal to finda proof for a query.
Assumables are used in a proof by contradiction.
A conflict is a set of assumables that, together with theknowledge base, implies false.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 2 / 37

Search Space for SLD Resolution
The search space for a query ?q given KB is defined by:
nodes: answer clauses yes ← body
neighbors of a node:I select an atom in bodyI there is a neighbor for every clause with that atom in the
headI neighbors are defined by SLD resolution
start node: yes ← q.
goal node: yes ←.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 3 / 37

Clicker Question
Suppose the knowledge base includes:
w ← y ∧ zp ← s ∧ tp ← w
answer clause: yes ← w ∧ ratom w is selectedwhich of the following is a possible next answer clause
A yes ← w ∧ r
B yes ← y ∧ z ∧ r
C yes ← y ∧ z ∧ p
D yes ← w ∧ r ∧ y ∧ z
E none of the above
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 4 / 37

Clicker Question
Suppose the knowledge base includes:
w ← y ∧ zp ← s ∧ tp ← w
answer clause: yes ← p ∧ ratom p is selectedwhich of the following is the next answer clause
A either yes ← w ∧ r or yes ← s ∧ t ∧ r
B yes ← s ∧ t ∧ w ∧ r
C either yes ← y ∧ z ∧ r or yes ← s ∧ t ∧ r
D yes ← y ∧ z ∧ s ∧ t
E none of the above
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 5 / 37

Learning Objectives
assumption-based reasoning (continued)
knowledge-based debugging
representing actions
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 6 / 37

Questions and Answers in Horn KBs
An assumable is an atom whose negation you areprepared to accept as part of a (disjunctive) answer.
A conflict of KB is a set of assumables that, given KBimply false.
A minimal conflict is a conflict such that no strict subsetis also a conflict.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 7 / 37

Clicker Question
{c , d , e, f , g , h} are the assumables
KB =
false ← a ∧ b.a← c .a← e.b ← d .b ← e.
A {e} is a minimal conflict
B {e} is a conflict but not a minimal conflict
C {e} is a set of assumables that is not a conflict
D {e} is not a set of assumables
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 8 / 37

Clicker Question
{c , d , e, f , g , h} are the assumables
KB =
false ← a ∧ b.a← c .a← e.b ← d .b ← e.
A {c , d , e} is a minimal conflict
B {c , d , e} is a conflict but not a minimal conflict
C {c , d , e} is a set of assumables that is not a conflict
D {c , d , e} is not a set of assumables
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 9 / 37

Clicker Question
{c , d , e, f , g , h} are the assumables
KB =
false ← a ∧ b.a← c .a← e.b ← d .b ← e.
A {c , d} is a minimal conflict
B {c , d} is a conflict but not a minimal conflict
C {c , d} is a set of assumables that is not a conflict
D {c , d} is not a set of assumables
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 10 / 37

Clicker Question
{c , d , e, f , g , h} are the assumables
KB =
false ← a ∧ b.a← c .a← e.b ← d .b ← e.
A {c , d , e, h} is a minimal conflict
B {c , d , e, h} is a conflict but not a minimal conflict
C {c , d , e, h} is a set of assumables that is not a conflict
D {c , d , e, h} is not a set of assumables
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 11 / 37

Clicker Question
{c , d , e, f , g , h} are the assumables
KB =
false ← a ∧ b.a← c .a← e.b ← d .b ← e.
A {a, d} is a minimal conflict
B {a, d} is a conflict but not a minimal conflict
C {a, d} is a set of assumables that is not a conflict
D {a, d} is not a set of assumables
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 12 / 37

Clicker Question
{c , d , e, f , g , h} are the assumables
KB =
false ← a ∧ b.a← c .a← e.b ← d .b ← e.
The set of all minimal conflicts is
A {{e}}B {{e}, {c , d}}C {{e}, {c , d}, {e, d}, {c , e}}D {}E None of the above
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 13 / 37
Using Conflicts for Diagnosis
Assume that the user is able to observe whether a light islit or dark and whether a power outlet is dead or live.
A light can’t be both lit and dark. An outlet can’t beboth live and dead:
false ← dark l1 ∧ lit l1.
false ← dark l2 ∧ lit l2.
false ← dead p1 ∧ live p2.
Assume the individual components are working correctly:
assumable ok l1.
assumable ok s2.
. . .
Suppose switches s1, s2, and s3 are all up:up s1. up s2. up s3.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 14 / 37
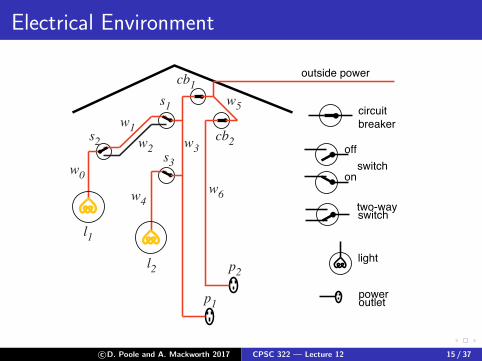
Electrical Environment
light
two-wayswitch
switch
off
on
poweroutlet
circuit�breaker
outside power
�
l1
l2
w1
w0
w2
w4
w3
w6
w5
p2
p1
cb2
cb1s1
s2s3
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 15 / 37

Representing the Electrical Environment
light l1.
light l2.
up s1.
up s2.
up s3.
live outside.
lit l1 ← live w0 ∧ ok l1.
live w0 ← live w1 ∧ up s2 ∧ ok s2.
live w0 ← live w2 ∧ down s2 ∧ ok s2.
live w1 ← live w3 ∧ up s1 ∧ ok s1.
live w2 ← live w3 ∧ down s1 ∧ ok s1.
lit l2 ← live w4 ∧ ok l2.
live w4 ← live w3 ∧ up s3 ∧ ok s3.
live p1 ← live w3.
live w3 ← live w5 ∧ ok cb1.
live p2 ← live w6.
live w6 ← live w5 ∧ ok cb2.
live w5 ← live outside.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 16 / 37

If the user has observed l1 and l2 are both dark:
dark l1. dark l2.
There are two minimal conflicts:
{ok cb1, ok s1, ok s2, ok l1} and
{ok cb1, ok s3, ok l2}.You can derive:
(¬ok cb1 ∨ ¬ok s1 ∨ ¬ok s2 ∨ ¬ok l1)∧(¬ok cb1 ∨ ¬ok s3 ∨ ¬ok l2).
Either cb1 is broken or there is one of six double faults.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 17 / 37

Conflicts in AILog
http://artint.info/code/ailog/ailog_code/ch05/
elect_cbd.ail
Load into AILog and ask queries commented out at bottom.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 18 / 37

Diagnoses
A consistency-based diagnosis is a set of assumables thathas one element in each conflict.
A minimal diagnosis is a diagnosis such that no subset isalso a diagnosis.
Intuitively, one of the minimal diagnoses must hold. Adiagnosis holds if all of its elements are false.
Example: For the proceeding example the conflicts imply
(¬ok cb1 ∨ ¬ok s1 ∨ ¬ok s2 ∨ ¬ok l1)∧(¬ok cb1 ∨ ¬ok s3 ∨ ¬ok l2).
This can be distributed into:
¬ok cb1 ∨ (¬ok s1 ∧ ¬ok s3) ∨ (¬ok s1 ∧ ¬ok l2)
∨ (¬ok s2 ∧ ¬ok s3) ∨ (¬ok s2 ∧ ¬ok l2)
∨ (¬ok l1 ∧ ¬ok s3) ∨ (¬ok l1 ∧ ¬ok l2)
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 19 / 37

Recall: top-down consequence finding
To solve the query ?q1 ∧ . . . ∧ qk :
ac := “yes ← q1 ∧ . . . ∧ qk”repeat
select atom a1 from the body of acchoose clause C from KB with a1 as headreplace a1 in the body of ac by the body of C
until ac is an answer.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 20 / 37

Implementing conflict finding: top down
Query is false.
Don’t select an atom that is assumable.
Stop when all of the atoms in the body of the generalisedquery are assumable:
I This set of assumables is a conflict
You may need to search to find minimal conflicts
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 21 / 37

Example
false ← a.
a← b ∧ c .
b ← d .
b ← e.
c ← f .
c ← g .
e ← h ∧ w .
e ← g .
w ← f .
assumable d , f , g , h.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 22 / 37

Knowledge-Level Debugging
There are four types of non-syntactic errors that can arise inrule-based systems:
An incorrect answer is produced: an atom that is false inthe intended interpretation was derived.
Some answer wasn’t produced: the proof failed when itshould have succeeded. Some particular true atom wasn’tderived.
The program gets into an infinite loop.
The system asks irrelevant questions.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 23 / 37

Debugging incorrect answers
Suppose atom g was proved but is false in the intendedinterpretation.
There must be a clause g ← a1 ∧ . . . ∧ ak in theknowledge base that was used to prove g .
Either:I one of the ai is false in the intended interpretation orI all of the ai are true in the intended interpretation.
Incorrect answers can be debugged by only answeringyes/no questions.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 24 / 37

Electrical Environment
light
two-wayswitch
switchoff
on
poweroutlet
circuit breaker
outside powercb1
s1
w1s2 w2
w0
l1
w3s3
w4
l2p1
w5
cb2
w6
p2
http://artint.info/code/ailog/ailog_code/ch05/
elect_bug.ail (no assumables or askables)c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 25 / 37

Missing Answers
If atom g is true in the intended interpretation, but could notbe proved, either:
There is no appropriate clause for g .
There is a rule g ← a1 ∧ . . . ∧ ak that should havesucceeded.
I One of the ai is true in the interpretation and could notbe proved.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 26 / 37

State-space Search
deterministic or stochastic dynamics
fully observable or partially observable
explicit states or features or individuals and relations
static or finite stage or indefinite stage or infinite stage
goals or complex preferences
perfect rationality or bounded rationality
flat or modular or hierarchical
single agent or multiple agents
knowledge is given or knowledge is learned
reason offline or reason while interacting with environment
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 27 / 37

Classical Planning
deterministic or stochastic dynamics
fully observable or partially observable
explicit states or features or individuals and relations
static or finite stage or indefinite stage or infinite stage
goals or complex preferences
perfect rationality or bounded rationality
flat or modular or hierarchical
single agent or multiple agents
knowledge is given or knowledge is learned
reason offline or reason while interacting with environment
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 28 / 37

Planning
Planning is deciding what to do based on an agent’sability, its goals. and the state of the world.
Planning is finding a sequence of actions to solve a goal.
Initial assumptions:I The world is deterministic.I There are no exogenous events outside of the control of
the robot that change the state of the world.I The agent knows what state it is in.I Time progresses discretely from one state to the next.I Goals are predicates of states that need to be achieved.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 29 / 37

Actions
A deterministic action is a partial function from states tostates.
The preconditions of an action specify when the actioncan be carried out.
The effect of an action specifies the resulting state.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 30 / 37

Delivery Robot Example
Coffee Shop(cs)
Mail Room(mr )
Lab(lab)
Sam'sOffice(off )
Features:RLoc – Rob’s locationRHC – Rob has coffeeSWC – Sam wants coffeeMW – Mail is waitingRHM – Rob has mail
Actions:mc – move clockwisemcc – move counterclockwisepuc – pickup coffeedc – deliver coffeepum – pickup maildm – deliver mail
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 31 / 37

Explicit State-space Representation
State Action Resulting State〈lab,¬rhc , swc ,¬mw , rhm〉 mc 〈mr ,¬rhc , swc ,¬mw , rhm〉〈lab,¬rhc , swc ,¬mw , rhm〉 mcc 〈off ,¬rhc , swc ,¬mw , rhm〉〈off ,¬rhc , swc ,¬mw , rhm〉 dm 〈off ,¬rhc , swc ,¬mw ,¬rhm〉〈off ,¬rhc , swc ,¬mw , rhm〉 mcc 〈cs,¬rhc , swc ,¬mw , rhm〉〈off ,¬rhc , swc ,¬mw , rhm〉 mc 〈lab,¬rhc , swc ,¬mw , rhm〉. . . . . . . . .
What happens when we also want to model its battery charge?
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 32 / 37

STRIPS Representation
For each action specify:
precondition: when the action can be carried out.
effect: a set of assignments of values to features that aremade true by this action.
STRIPS assumption: every feature not mentioned in theeffects is unaffected by the action.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 33 / 37

Example STRIPS representation
Pick-up coffee (puc):
precondition: [cs,¬rhc]
effect: [rhc]
Deliver coffee (dc):
precondition: [off , rhc]
effect: [¬rhc ,¬swc]
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 34 / 37

Planning
Given:
A description of the effects and preconditions of theactions
A description of the initial state
A goal to achieve
find a sequence of actions that is possible and will result in astate satisfying the goal.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 35 / 37
Forward Planning
Idea: search in the state-space graph.
The nodes represent the states
The arcs correspond to the actions: The arcs from a states represent all of the actions that are legal in state s.
A plan is a path from the state representing the initialstate to a state that satisfies the goal.
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 36 / 37

Example state-space graph
mac
Actionsmc: move clockwisemac: move anticlockwisenm: no movepuc: pick up coffeedc: deliver coffeepum: pick up maildm: deliver mail
mc
mac
mac
mac
mac
mc
mcmc
puc
〈cs,rhc,swc,mw,rhm〉
〈cs,rhc,swc,mw,rhm〉 〈off,rhc,swc,mw,rhm〉 〈mr,rhc,swc,mw,rhm〉
〈off,rhc,swc,mw,rhm〉
〈mr,rhc,swc,mw,rhm〉
〈lab,rhc,swc,mw,rhm〉〈cs,rhc,swc,mw,rhm〉
dc
〈off,rhc,swc,mw,rhm〉
〈lab,rhc,swc,mw,rhm〉
〈mr,rhc,swc,mw,rhm〉
Locations:cs: coffee shopoff: officelab: laboratorymr: mail room
Feature valuesrhc: robot has coffeeswc: Sam wants coffeemw: mail waitingrhm: robot has mail
c©D. Poole and A. Mackworth 2017 CPSC 322 — Lecture 12 37 / 37