course roadmap what is dc motor? me451: control systems€¦ · modeling analysis design time...
TRANSCRIPT
1
1
ME451: Control SystemsME451: Control Systems
Prof. Clark Radcliffe and Prof. Prof. Clark Radcliffe and Prof. Jongeun ChoiJongeun ChoiDepartment of Mechanical EngineeringDepartment of Mechanical Engineering
Michigan State UniversityMichigan State University
Lecture 9Lecture 9Modeling of DC motorsModeling of DC motors
2
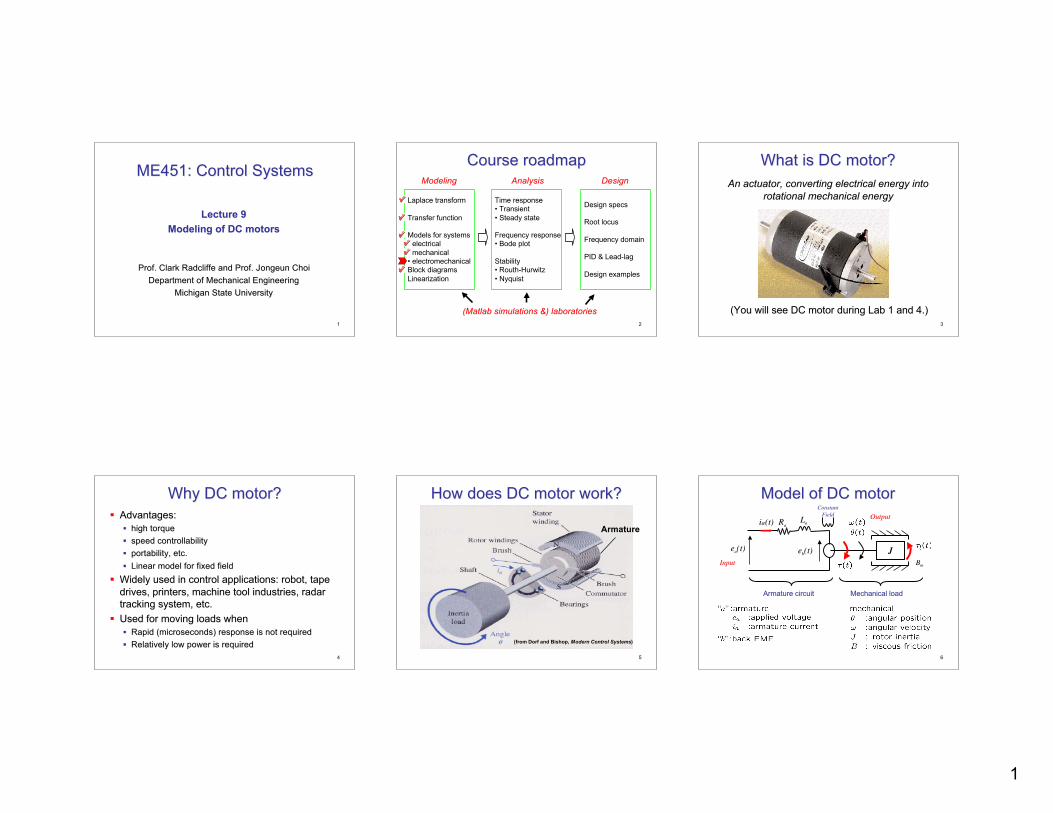
Course roadmapCourse roadmap
Laplace transformLaplace transform
Transfer functionTransfer function
Models for systemsModels for systems•• electrical electrical•• mechanical mechanical•• electromechanical electromechanicalBlock diagramsBlock diagramsLinearizationLinearization
ModelingModeling AnalysisAnalysis DesignDesign
Time responseTime response•• Transient Transient•• Steady state Steady state
Frequency responseFrequency response•• Bode plot Bode plot
StabilityStability•• Routh-HurwitzRouth-Hurwitz•• Nyquist Nyquist
Design specsDesign specs
Root locusRoot locus
Frequency domainFrequency domain
PID & Lead-lagPID & Lead-lag
Design examplesDesign examples
((MatlabMatlab simulations &) laboratories simulations &) laboratories3
What is DC motor?What is DC motor?An actuator, converting electrical energy intoAn actuator, converting electrical energy into
rotational mechanical energyrotational mechanical energy
(You will see DC motor during Lab 1 and 4.)(You will see DC motor during Lab 1 and 4.)
4
Why DC motor?Why DC motor? Advantages:Advantages:
high torquehigh torque speed controllabilityspeed controllability portability, etc.portability, etc. Linear model for fixed fieldLinear model for fixed field
Widely used in control applications: robot, tapeWidely used in control applications: robot, tapedrives, printers, machine tool industries, radardrives, printers, machine tool industries, radartracking system, etc.tracking system, etc.
Used for moving loads whenUsed for moving loads when Rapid (microseconds) response is not requiredRapid (microseconds) response is not required Relatively low power is requiredRelatively low power is required
5
How does DC motor work?How does DC motor work?
ArmatureArmature
(from Dorf and Bishop, Modern Control Systems)
6
Model of DC motorModel of DC motor
Armature circuitArmature circuit Mechanical loadMechanical load
eeaa(t)(t)
iiaa(t)(t) RRaaLLaa
eebb(t)(t) JBBmmInputInput
OutputOutputConstantConstantFieldField

2
7
Three Energy Domains:Three Energy Domains: Electrical (Armature circuit)Electrical (Armature circuit)
Magnetic Connection between mechanical & electricalMagnetic Connection between mechanical & electrical•• Electrically produced torqueElectrically produced torque
•• Mechanically produced back Mechanically produced back emfemf
Mechanical RotationMechanical Rotation
Modeling of DC motor: time domainModeling of DC motor: time domain
Load torqueLoad torque8
Substitute magnetic connection into ElectricalSubstitute magnetic connection into Electricaland Mechanical and Mechanical ODEODE’’ss Electrical (armature circuit)Electrical (armature circuit)
Mechanical RotationMechanical Rotation
Modeling of DC motor: time domainModeling of DC motor: time domain
ea = Raia (t) + La
diadt
+ Kb!!(t)
Load torqueLoad torque
J !!!(t) = K" ia (t) # B !!(t) # " l (t)J !!!(t) + B !!(t) # K" ia (t) = #" l (t)
9
Substitute magnetic connection into ElectricalSubstitute magnetic connection into Electricaland Mechanical and Mechanical ODEODE’’ss Electrical (armature circuit)Electrical (armature circuit)
Mechanical RotationMechanical Rotation
Modeling of DC motor:Modeling of DC motor:Laplace Laplace domaindomain
Ea (s) = RaIa (s) + LasIa (s) + Kbs!(s)= Ra + Las( ) Ia (s) + Kbs!(s)
Js2!(s) + Bs!(s) " K# Ia (s) = "$l (s)
Js2 + Bs( )!(s) " K# Ia (s) = "$l (s)
10
Rearranging Rearranging ODEODE’’ss Electrical (armature circuit)Electrical (armature circuit)
Mechanical RotationMechanical Rotation
Matrix FormMatrix Form
Modeling of DC motor:Modeling of DC motor:Laplace Laplace domaindomain
Ra + Las( ) Ia (s) + Kbs!(s) = Ea (s)
Js2 + Bs( )!(s) " K# Ia (s) = "$l (s)
Ra + Las( ) Kbs
K! " Js2 + Bs( )#
$
%%
&
'
((
Ia (s))(s)
#
$%%
&
'((=
Ea (s)*l (s)
#
$%%
&
'((
11
Using rotation velocity Using rotation velocity ΩΩ(s)(s)=s=sΘΘ(s)(s)
NoticeNotice that the system isthat the system is ““not quitenot quite”” symmetricsymmetric There is a reasonThere is a reason…… look at energy conservation look at energy conservation
across the magnetic fieldacross the magnetic field
Modeling of DC motor:Modeling of DC motor:Laplace Laplace domaindomain
Ra + Las( ) Kb
K! " Js + B( )#
$
%%
&
'
((
Ia (s))(s)
#
$%%
&
'((=
Ea (s)*l (s)
#
$%%
&
'((
Power in = Eb (s)Ia (s) = !(s)"(s) = Power outBut Eb (s) = Kb"(s) and !(s) = K# Ia (s) so Kb"(s)Ia (s) = K# Ia (s)"(s)and for power conservation Kb = K# = Km (defined)
12
Transfer FunctionsTransfer Functions Two inputsTwo inputs and two outputsand two outputs Solving for Solving for givengiven
Where [ ]Where [ ]-1-1 is is
Ea (s),!l (s)[ ] Ia (s),!(s)[ ]
Ia (s)!(s)
"
#$$
%
&''=
Ra + Las( ) Km
Km ( Js + B( )"
#
$$
%
&
''
(1
Ea (s))l (s)
"
#$$
%
&''
Ea (s),!l (s)[ ]
Ra + Las( ) Km
Km ! Js + B( )"
#
$$
%
&
''
!1
=adj()det()
=
! Js + B( ) !Km
!Km Ra + Las( )"
#
$$
%
&
''
T
! Ra + Las( ) Js + B( ) + Km2"# %&
Ia (s),!(s)[ ]

3
13
Transfer FunctionsTransfer Functions Simplifying, the TF function matrix equations Simplifying, the TF function matrix equations ……
Ia (s)!(s)
"
#$$
%
&''=
Js + B( ) Km
Km ( Ra + Las( )"
#
$$
%
&
''
Ea (s))l (s)
"
#$$
%
&''
Ra + Las( ) Js + B( ) + Km2"# %&
14
Model Parameters fromModel Parameters fromManufacturer DataManufacturer Data
How do you compute parameters given How do you compute parameters given ……
From: http://www.compucanjes.com/manuales/rs-555sh20.pdf15
Model Parameters fromModel Parameters fromManufacturer DataManufacturer Data
How do you compute parameters given How do you compute parameters given ……
From: http://www.compucanjes.com/manuales/rs-555sh20.pdf
16
Manufacturer specsManufacturer specs Steady State so we need Steady State ModelSteady State so we need Steady State Model
Set allSet all time derivatives to zerotime derivatives to zero
becomesbecomes
Ra + Las( ) Km
Km ! Js + B( )"
#
$$
%
&
''
Ia (s)((s)
"
#$$
%
&''=
Ea (s))l (s)
"
#$$
%
&''
Ra Km
Km !B
"
#$$
%
&''
Ia (s)((s)
"
#$$
%
&''=
Ea (s))l (s)
"
#$$
%
&''
17
Manufacturer specsManufacturer specs
Clamp shaft (Clamp shaft (ωω = 0) and = 0) and ““stallstall”” motor motor
Ra Km
Km !B
"
#$$
%
&''
ia(
"
#$$
%
&''=
ea) l
"
#$$
%
&''
Raia = ea ! Ra = estall istall = 24v / 9A = 2.7 (Ohm)
Kmia = ! l " Km = ! stall istall = 0.225 N-m 9A = 0.025 N-m/A
(Note consistent units!!)
18
Manufacturer specsManufacturer specs
Apply no load:Apply no load:
And to checkAnd to check……
Ra Km
Km !B
"
#$$
%
&''
ia(
"
#$$
%
&''=
ea) l
"
#$$
%
&''
Kminoload ! B"noload = 0 # B = Kminoload "noload
B = Km 0.18A( ) 8500 rpm
= 0.226 N-m/A( ) 0.18A( ) 8500 rpm 1min/ 60sec( ) 2! rad 1 rev( )( )= 0.226 N-m/A( ) 0.18A( ) 890 rad/sec( )= 5.2 x 10"6 (N-m-sec/rad)
Km = ea ! Raia( ) " = 24v ! 2.67( ) 0.18A( )( ) 890 rad/sec( )= 0.026 v-sec/rad It independently agrees with 0.025 N-m/A !

4
19
Check model with other SpecsCheck model with other Specs
At max efficiency,At max efficiency,Kmia ! B" =
?# l where # l = 0.0279 N-m( )
Km = 0.0255 N-m/A( ), B = 46x10!6 N-m-sec/rad( ),ia = 1.27A, " = 7400 rpm( ) = 775 rad/sec( )Kmia ! B" = 0.0255( ) 1.27( ) ! 46x10!6( ) 775( ) = 0.0287 (N-m)
Ra Km
Km !B
"
#$$
%
&''
ia(
"
#$$
%
&''=
ea) l
"
#$$
%
&''
Raia ! Km" =?ea where ea = 24 (v)
Ra = 2.67 (Ohm), Km = 0.0255 N-m/A( ),ia = 1.27A, " = 7400 rpm( ) = 775 rad/sec( )Raia ! Km" = 2.67( ) 1.27( ) ! 0.0257( ) 775( ) = 23.0 (v)
20
Check model with other SpecsCheck model with other Specs
At max efficiency,At max efficiency,Model predicts ! = 0.0287 (N-m)Measured ! = 0.0279 (N-m)Difference: 3.99%
Ra Km
Km !B
"
#$$
%
&''
ia(
"
#$$
%
&''=
ea) l
"
#$$
%
&''
Model Predicts ea = 23.0 (v)Measured ea = 24.0 (v)Difference: -2.79%
Looks Good.As accurate as themeasured values!
21
Summary and ExercisesSummary and Exercises Modeling of DC motorModeling of DC motor
What is DC motor and how does it work?What is DC motor and how does it work? Derivation of a transfer functionDerivation of a transfer function
NextNext LinearizationLinearization of nonlinear models, one of the most of nonlinear models, one of the most
important topics in engineering analysisimportant topics in engineering analysis
ExercisesExercises Read Section 2.7, 2.8.Read Section 2.7, 2.8. Go over the derivation for DC motor transfer functionsGo over the derivation for DC motor transfer functions
by yourself. Obtain T(s)/Eby yourself. Obtain T(s)/Eaa(s).(s).
22
Main message until this pointMain message until this point
Many systems Many systems can be represented can be represented as as transfer functionstransfer functions!!
Using the transfer functions, Using the transfer functions, ……. . (to be continued)(to be continued)