copyright 2001, matt dwyer, john hatcliff, and radu iosif. the syllabus and all lectures for this...
TRANSCRIPT

Copyright 2001, Matt Dwyer, John Hatcliff, and Radu Iosif. The syllabus and all lectures for this course are copyrighted materials and may not be used in other course settings outside of Kansas State University in their current form or modified form without the express written permission of one of the copyright holders. During this course, students are prohibited from selling notes to or being paid for taking notes by any person or commercial firm without the express written permission of one of the copyright holders.
CIS 842: Specification and CIS 842: Specification and Verification of Reactive SystemsVerification of Reactive Systems
Lecture 3: Temporal Logic Specifications

Reasoning about ExecutionsReasoning about Executions
We want to reason about execution trees– tree node = snap shot of the program’s state
Reasoning consists of two layers– defining predicates on the program states (control points,
variable values)– expressing temporal relationships between those predicates
[L3, (mt3, vr3), ….]
Explored State-Space (computation tree)
Conceptual View
[L1, (mt1, vr1), ….]
[L2, (mt2, vr2), ….]
[L5, (mt5, vr5), ….]
L1 L4
L2
L3
L5
?b1
?err
?b0
?b1 !a1
?a1?b0
?err
!a0

Computational Tree Logic (CTL)Computational Tree Logic (CTL)
::= P …primitive propositions
| ! | && | || | -> …propositional connectives
| AG | EG | AF | EF …temporal operators | AX | EX | A[ U ] | E[ U ]
Syntax
Semantic Intuition
AG p …along All paths p holds Globally
EG p …there Exists a path where p holds Globally
AF p …along All paths p holds at some state in the Future
EF p …there Exists a path where p holds at some state in the Future
path quantifier
temporal operator

Computational Tree Logic (CTL)Computational Tree Logic (CTL)
::= P …primitive propositions
| ! | && | || | -> …propositional connectives
| AG | EG | AF | EF …path/temporal operators | AX | EX | A[ U ] | E[ U ]
Syntax
Semantic Intuition
AX p …along All paths, p holds in the neXt state
EX p …there Exists a path where p holds in the neXt state
A[p U q] …along All paths, p holds Until q holds
E[p U q] …there Exists a path where p holds Until q holds

Computation Tree LogicComputation Tree Logic
p
p
p
p p p
p
p
p
p
p
p p p p
AG p

Computation Tree LogicComputation Tree Logic
EG p p
p
p
p

Computation Tree LogicComputation Tree Logic
AF p
p
p p p
p
p

Computation Tree LogicComputation Tree Logic
EF p
p

Computation Tree LogicComputation Tree Logic
AX p
p
p p
p
p p
p
p
p

Computation Tree LogicComputation Tree Logic
EX p
p
p
p
p p p

Computation Tree LogicComputation Tree Logic
A[p U q]p
p
p
q q p
p
q
q
p
p

Computation Tree LogicComputation Tree Logic
E[p U q]p
p
q q p
p
q
q
q

Example CTL SpecificationsExample CTL Specifications
For any state, a request (for some resource) will eventually be acknowledged
AG(requested -> AF acknowledged)
From any state, it is possible to get to a restart state
AG(EF restart)
An upwards travelling elevator at the second floor does not changes its direction when it has passengers waiting to go to the fifth floor
AG((floor=2 && direction=up && button5pressed) -> A[direction=up U floor=5])
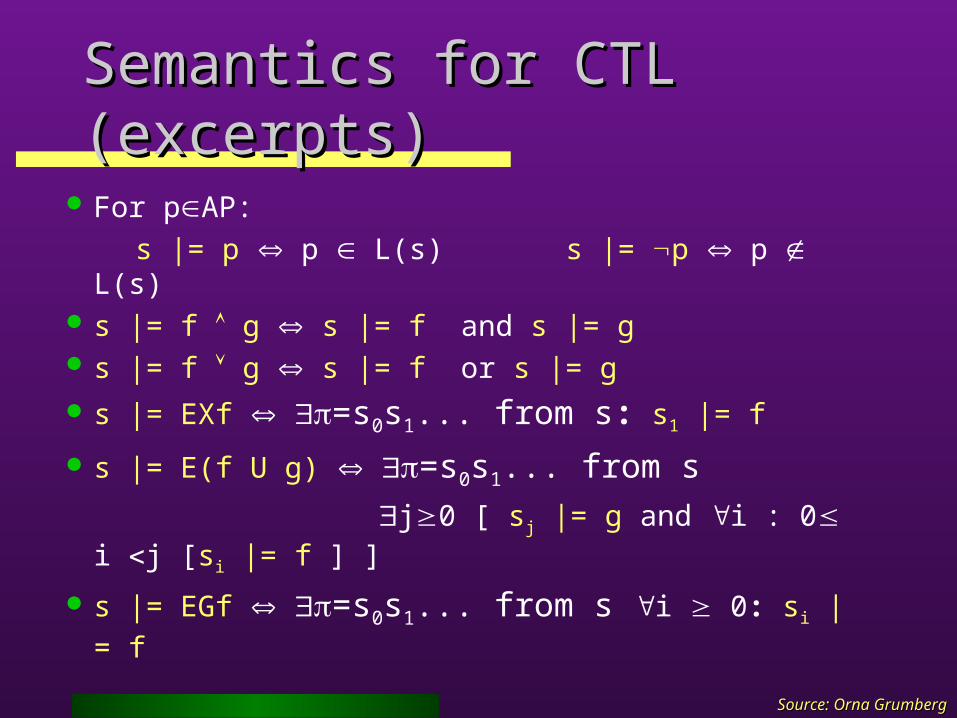
Semantics for CTL (excerpts)Semantics for CTL (excerpts)
For pAP:
s |= p p L(s) s |= p p L(s) s |= f g s |= f and s |= g s |= f g s |= f or s |= g
s |= EXf =s0s1... from s: s1 |= f
s |= E(f U g) =s0s1... from s
j0 [ sj |= g and i : 0 i j [si |= f ] ]
s |= EGf =s0s1... from s i 0: si |= f
Source: Orna GrumbergSource: Orna Grumberg

CTL NotesCTL Notes
Invented by E. Clarke and E. A. Emerson (early 1980’s)
Specification language for Symbolic Model Verifier (SMV) model-checker
SMV is a symbolic model-checker instead of an explicit-state model-checker
Symbolic model-checking uses Binary Decision Diagrams (BDDs) to represent boolean functions (both transition system and specification

Linear Temporal LogicLinear Temporal Logic
Restrict path quantification to “ALL” (no “EXISTS”)
Reason in terms of linear traces instead of branching trees

Linear Temporal Logic (LTL)Linear Temporal Logic (LTL)
Semantic Intuition
[] …always
<> …eventually
U … until
::= P …primitive propositions | ! | && | || | -> …propositional connectives | [] | <> | U X …temporal operators
Syntax

Linear Time LogicLinear Time Logic
[]<> p
p p p
“Along all paths, it must be the case that globally (I.e., in each state we come to) eventually p will hold”
Expresses a form of fairness– p must occur infinitely often along the path – To check under the assumption of fair traces, check
[]<>p ->

Linear Time LogicLinear Time Logic
p
<>[] p
p p
“Along all paths, eventually it is the case that p holds globally (I.e., at each state)”
pp p p p

Semantics for LTLSemantics for LTL
Semantics of LTL is given with respect to a (usually infinite) path or trace– = s1 s2 s3 …
We write i for the suffix starting at si, e.g., 3 = s3 s4 s5 …
A system satisfies an LTL formula f if each path through the system satisfies f.

Semantics for LTLSemantics for LTL
For pAP:
|= p p L(s1) |= p p L(s1) |= f g |= f and |= g |= f g |= f or |= g |= Xf 2 |= f |= <>f i >= 1. i |= f |= <>f i >= 1. i |= f |= (f U g) i >= 1. i |= g
and j : 1 j i-1. i |= f
LTL NotesLTL Notes
Invented by Prior (1960’s), and first use to reason about concurrent systems by A. Pnueli, Z. Manna, etc.
LTL model-checkers are usually explicit-state checkers due to connection between LTL and automata theory
Most popular LTL-based checker is Spin (G. Holzman)

Comparing LTL and CTLComparing LTL and CTL
CTL LTL
CTL*
CTL is not strictly more expression than LTL (and vice versa)CTL* invented by Emerson and Halpern in 1986 to unify CTL and LTLWe believe that almost all properties that one wants to express about software lie in intersection of LTL and CTL

LTL and Automata TheoryLTL and Automata Theory

LTL Checking in SpinLTL Checking in Spin